
転がり軸受のすきま測定方法

【課題】 サイクルタイムの増加を抑えてラジアルすきまの測定精度を向上させることができる転がり軸受のすきま測定方法を提供する。
【解決手段】 外輪を軸方向に対して直角の両方向に移動可能とするとともに、内輪を1ピッチ=360°/(2m+1)ずつ(例えばm=1)回転可能とする。一方向に荷重を負荷して外輪移動量を測定した後は、内輪を1ピッチだけ回転させるとともに、逆方向に荷重を負荷して外輪移動量を測定し、次いで、内輪を1ピッチだけ回転させるとともに、正方向に荷重を負荷して外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得る。
【解決手段】 外輪を軸方向に対して直角の両方向に移動可能とするとともに、内輪を1ピッチ=360°/(2m+1)ずつ(例えばm=1)回転可能とする。一方向に荷重を負荷して外輪移動量を測定した後は、内輪を1ピッチだけ回転させるとともに、逆方向に荷重を負荷して外輪移動量を測定し、次いで、内輪を1ピッチだけ回転させるとともに、正方向に荷重を負荷して外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得る。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、転がり軸受のすきま測定方法に関する。
【背景技術】
【0002】
内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受では、軸受すきまが所定の範囲内にあることが必要であり、そのために、ラジアルすきまなどのすきまを測定することが必要となっている。従来のラジアルすきまの測定方法は、所定位置において内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の移動量を測定する工程と、内輪および外輪のいずれか一方を逆方向に移動させて第2の移動量を測定する工程と、第1および第2の移動量から目盛りの読みの差の絶対値として転がり軸受のラジアルすきまを求める工程とを含んでいるものとされている。
【0003】
また、特許文献1には、内輪を回転させてラジアル振れやラジアルすきまを測定することが開示されている。
【特許文献1】特開昭55−39009号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ラジアルすきまは、1回転するのに伴ってその値が変化するにもかかわらず、上記従来のラジアルすきまの測定方法は、外輪に対して内輪を相対的に回転させることなく、一点で内輪および外輪のいずれか一方を正逆両方向に変位させてラジアルすきまを求めるものであり、その後に、転がり軸受をハウジングや回転軸に取り付ける場合に、有用な値として利用しにくいものとなっている。ラジアルすきまの測定精度を向上するためには、軸受を回転させ、測定を一点でなく多点で行い、ばらつきを知ることが好ましいが、多点で測定を行うと1つの軸受の測定にかかる時間(サイクルタイム)が長くなるという問題が発生する。
【0005】
特許文献1には、内輪を回転させてラジアル振れを測定することが開示されているが、ラジアル振れは、360°回転させたときのラジアル方向変位の振れを見るもので、ラジアル振れからラジアルすきまを求めることは困難である。
【0006】
この発明の目的は、サイクルタイムの増加を抑えてラジアルすきまの測定精度を向上させることができる転がり軸受のすきま測定方法を提供することにある。
【課題を解決するための手段】
【0007】
この発明による転がり軸受のすきま測定方法は、内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受のラジアルすきまを測定する方法であって、内輪および外輪のいずれか一方を回転不可能に保持する工程と、外輪に対して内輪を相対的に回転させて第1の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の位置における移動量を測定する工程と、第1の位置から外輪に対して内輪を位相にして180°分相対的に回転させて第2の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第2の位置における移動量を測定する工程と、第1および第2の位置における外輪移動量から転がり軸受のラジアルすきまを求める工程とを含んでおり、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うことを特徴とするものである。
【0008】
この発明による転がり軸受のすきま測定方法を実施するすきま測定装置は、例えば、駆動手段によって回転させられる駆動軸と、駆動軸に内輪を結合する内輪クランプ手段と、駆動軸の軸線回りの位相角度を検出する位相角度検知手段と、外輪を保持する外輪クランプ手段と、外輪クランプ手段を支持して軸線方向と直交する方向に移動可能な可動テーブルと、可動テーブルに軸線方向と直交する方向の荷重を負荷する荷重負荷手段と、可動テーブルに荷重が負荷された際の外輪の移動量を検知する例えば差動トランスのような外輪移動量検出手段と、外輪の移動量から玉軸受のラジアルすきまを求める演算手段とを備えているものとされる。
【0009】
転がり軸受は、例えば玉軸受とされるが、ころ軸受など他の転がり軸受であってもよい。
【0010】
ラジアルすきまの検出前に、一方向から荷重をかけながら予備回転を行うことが好ましく、これにより、転がり軸受の転動体が軌道底に移動するので、適正なラジアルすきまを得ることができる。この場合、軸受の軸方向を水平にすることで、転動体が軌道底に移動しやすくなり、より軽荷重で精度のよい測定を行うことができる。
【0011】
荷重を負荷するに際しては、外輪を軸方向に対して直角の両方向に移動可能とすることが好ましい。内輪は、外輪に荷重が負荷された状態で回転させられ、予備回転後には、内輪を1ピッチ=360°/(2m+1),m:自然数ずつ回転可能とし、一方向に荷重を負荷して外輪移動量を測定した後は、逆方向に荷重を負荷して内輪を1ピッチだけ回転させて、外輪移動量を測定し、次いで、正方向に荷重を負荷して内輪を1ピッチだけ回転させて、外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得ることが好ましい。そして、同じ位置で一方向と逆方向に荷重を負荷したときのそれぞれの外輪移動量から1つのラジアルすきま(移動量の絶対値の和)を求め、他の位置でも同様にしてラジアルすきまを求め、少なくとも計(2m+1)個のラジアルすきまを平均することでラジアルすきまが求められる。こうして、1回転360°を奇数回に分割して等角度ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、負荷回数に対するサイクルタイムの影響を小さくすることができる。
【0012】
3等配の箇所でのラジアルすきまの測定は、具体的には、例えば、外輪クランプ手段の移動量を検出する差動トランスを使用して、次の順序で行われる。
【0013】
(a)外輪をクランプした後、+方向に負荷をかけ、内輪を予備回転(回転方向はどちらでも可)させる。
【0014】
(b)予備回転後のある位置の差動トランス値を記憶。
【0015】
(c)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0016】
(d)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0017】
(e)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0018】
(f)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0019】
(g)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0020】
(h)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0021】
(i)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0022】
(j)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0023】
(k)A〜C各位置の+方向変位と−方向変位の差(移動量の和)が各位置でのラジアルすきまとなるので、転動体の位置関係のばらつきを考慮して、|(h)−(e)|,|(e)−(b)|,|(i)−(f)|,|(f)−(c)|,|(j)−(g)|および|(g)−(d)|の6データの平均値をラジアルすきまとする。また、これらの6データの最大値を最大ラジアルすきま、最小値を最小ラジアルすきまとして記録する。
【発明の効果】
【0024】
この発明の転がり軸受のすきま測定方法によると、第1の位置における移動量を測定した後、内輪および外輪のいずれか一方を180°回転させて第2の位置における移動量を測定して、これらの移動量からラジアルすきまを求めるので、第1の位置だけで正逆両方向に変位させてラジアルすきまを求める従来のものに比べて、精度を向上することができ、また、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うので、サイクルタイムが長くなることを防止することができる。
【0025】
そして、1回転360°を奇数回に分割して等角度ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、測定点の数を増やすことでラジアルすきまのばらつき、最大値および最小値が分かるので、有用なラジアルすきまを精度よく得ることができ、しかも、これを得るためのサイクルタイムの増加を小さいものとすることができる。
【発明を実施するための最良の形態】
【0026】
この発明の実施の形態を、以下図面を参照して説明する。以下の説明において、図1の上下を上下といい、図1および図2の左を前、同右を後というものとする。
【0027】
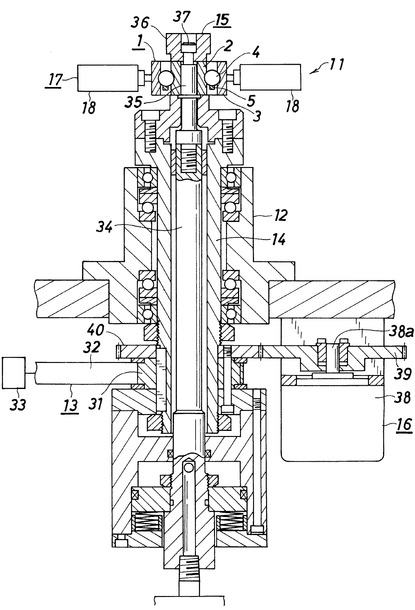
図1および図2は、この発明による転がり軸受のすきま測定方法を実施するためのすきま測定装置を示している。
【0028】
この発明によるすきま測定方法が対象としている転がり軸受(1)は、内輪(2)、外輪(3)、両輪(2)(3)間に配置された複数の転動体(例えば玉)(4)、および複数の転動体(5)を保持する保持器(5)を備えている。
【0029】
転がり軸受のすきま測定装置(11)は、ケーシング(12)内に回転自在に支持されて駆動手段(13)によって回転させられる上下方向にのびる駆動軸(14)と、駆動軸(14)に内輪(2)を結合する内輪クランプ手段(15)と、駆動軸(14)の軸線回りの位相角度を検出する位相角度検知手段(16)と、前後1対のアーム(18)を有し外輪(3)を保持する外輪クランプ手段(17)と、外輪クランプ手段(17)を支持して前後方向(軸線方向と直交する方向)に移動可能な可動テーブル(19)と、可動テーブル(19)を案内する前後方向にのびる1対のガイドレール(20)と、可動テーブル(19)に前後方向の荷重を負荷する荷重負荷手段(21)と、可動テーブル(19)に荷重が負荷された際の外輪(3)の移動量を検知する外輪移動量検出手段(22)と、外輪(3)の移動量から玉軸受(5)のラジアルすきまを求める演算手段(23)とを備えている。
【0030】
駆動手段(13)は、駆動軸(14)に固定された従動プーリ(31)と、従動プーリ(31)とベルト(32)によって結合された駆動プーリ(図示略)と、駆動プーリを駆動するモータ(33)とを有している。
【0031】
内輪クランプ手段(15)は、中空状とされた駆動軸(14)の内部に挿通されて先端に設けられた内輪嵌入用軸部(35)を駆動軸(14)から突出させた支持軸(34)と、内輪嵌入用軸部(35)に嵌め合わせられた内輪(2)に上方(軸方向先端側)から当てがわれる内輪クランプ治具(36)と、内輪クランプ治具(36)を内輪(2)に一体化するために内輪嵌入用軸部(35)にねじ合わされるおねじ部材(37)とを有している。
【0032】
位相角度検知手段(16)は、ロータリーエンコーダ(38)と、ロータリーエンコーダ(38)の入力軸(38a)と駆動軸(14)とを結合するギヤ(39)(40)とを有している。
【0033】
外輪クランプ手段(17)は、前後アーム(18)がそれぞれ取り付けられた前後1対のスライダ(41)と、スライダ(41)を案内するガイドレール(42)と、各スライダ(41)を互いに接近または離隔する方向に移動させるスライダ駆動手段(43)とを有している。外輪(3)は、前後アーム(18)によって径方向対称位置から挟持され、この状態で、可動テーブル(19)が前後方向に移動させられることで、外輪(3)に荷重が負荷される。外輪(3)をクランプする方向と可動テーブル(19)の移動方向とは、いずれも前後方向(互いに平行)とされている。
【0034】
荷重負荷手段(21)は、前後方向にのびるシリンダーロッド(45)を前進・後退させる流体圧シリンダー(44)と、可動テーブル(19)に固定されてシリンダーロッド(45)を挿通させるばね受け部材(46)と、シリンダーロッド(45)の基端部とばね受け部材(46)との間に配置された前進方向負荷ばね(47)と、シリンダーロッド(45)の先端部とばね受け部材(46)との間に配置された後退方向負荷ばね(48)とを有している。したがって、シリンダーロッド(45)を前進(左方に移動)させると、可動テーブル(19)は、前進方向負荷ばね(47)によって前進方向(以下では「+方向」と称す)に付勢され、また、シリンダーロッド(45)を後退(右方に移動)させると、可動テーブル(19)は、後退方向負荷ばね(48)によって後退方向(以下では「−方向」と称す)に付勢される。測定荷重は、フリー方向に回転させたときに一方向クラッチ(4)が離脱して、軸受(5)(6)だけで荷重を負荷できるように設定される。
【0035】
外輪移動量検出手段(22)は、外輪(3)の前後方向移動量=前後アーム(18)の前後方向移動量であることに基づいて、外輪(3)の前後方向移動量を求めるもので、装置に固定されている支持ブラケット(49)に支持されて前後アーム(18)の前後方向移動量を検出する差動トランス(50)を有している。
【0036】
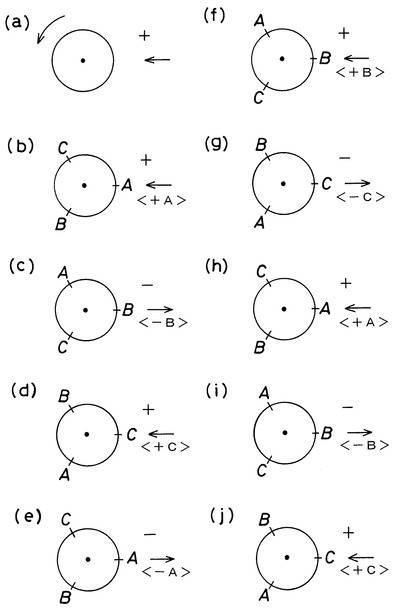
図3を参照して、上記のすきま測定装置(11)を使用して転がり軸受(1)のラジアルすきまを測定するステップを説明する。ここで、駆動軸(14)は、回転角度にして120°ずつ回転させられ、荷重負荷手段(21)は、この間に、+方向または−方向のいずれかに移動させられる。
【0037】
まず、転がり軸受(1)の転動体(4)を軌道底に移動させるために、図3(a)に示すように、外輪(3)をクランプした状態で、+方向に負荷をかけ、内輪(2)を予備回転(方向はどちらでも可)させる。
【0038】
次いで、図3(b)に示すように、予備回転後のある位置の差動トランス値<+A>を記憶させる。
【0039】
次いで、図3(c)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−B>を記憶する。
【0040】
次いで、図3(d)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+C>を記憶する。
【0041】
次いで、図3(e)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−A>を記憶する。
【0042】
次いで、図3(f)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+B>を記憶する。
【0043】
次いで、図3(g)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−C>を記憶する。
【0044】
次いで、図3(h)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+A>を記憶する。
【0045】
次いで、図3(i)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−B>を記憶する。
【0046】
次いで、図3(j)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+C>を記憶する。
【0047】
上記(b)〜(j)の操作において、A〜C各位置の+方向変位と−方向変位の差(移動量の和)が各位置でのラジアルすきまとなり、演算手段(23)においては、|(h)−(e)|=<+A>−<−A>,|(e)−(b)|=<+A>−<−A>,|(i)−(f)|=<+B>−<−B>,|(f)−(c)|=<+B>−<−B>,|(j)−(g)|=<+C>−<−C>および|(g)−(d)|=<+C>−<−C>の6データが得られる。したがって、例えばこれらの平均値を玉軸受(5)のラジアルすきまとすればよい。また、これらの6データの最大値を最大ラジアルすきま、最小値を最小ラジアルすきまとして、これが最大または最小ラジアルすきまの基準値を超えたものについては、ラジアルすきま異常として排除される。得られた最大ラジアルすきま、最小ラジアルすきまおよび平均ラジアルすきまは、この転がり軸受(1)をハウジングや回転軸に取り付ける際などに利用される。
【0048】
こうして、1回転360°を奇数回(3回)に分割して等角度(120°)ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、負荷回数に対するサイクルタイムの影響を小さくすることができる。
【0049】
上記一連の測定の後、外輪を例えば周方向に所定角度(90°ずつ、120°ずつ、180°ずつなど)回転させ、同様の測定を行うことにより、外輪についても、一点でなく多点における測定を行うことで、より精度の高いラジアルすきまを得ることができる。
【0050】
なお、上記において、内輪を回転させて、外輪を軸方向に直角の方向に移動させているが、外輪を回転させて、内輪を軸方向に直角の方向に移動させてもよい。
【図面の簡単な説明】
【0051】
【図1】図1は、この発明による転がり軸受のすきま測定方法を実施する装置の1例を示す縦断面図である。
【図2】図2は、同平面図である。
【図3】図3は、この発明による転がり軸受のすきま測定方法の1実施形態を順を追って説明する縦断面図である。
【符号の説明】
【0052】
(1) 転がり軸受
(2) 内輪
(3) 外輪
(4) 玉(転動体)
(11) すきま測定装置
【技術分野】
【0001】
この発明は、転がり軸受のすきま測定方法に関する。
【背景技術】
【0002】
内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受では、軸受すきまが所定の範囲内にあることが必要であり、そのために、ラジアルすきまなどのすきまを測定することが必要となっている。従来のラジアルすきまの測定方法は、所定位置において内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の移動量を測定する工程と、内輪および外輪のいずれか一方を逆方向に移動させて第2の移動量を測定する工程と、第1および第2の移動量から目盛りの読みの差の絶対値として転がり軸受のラジアルすきまを求める工程とを含んでいるものとされている。
【0003】
また、特許文献1には、内輪を回転させてラジアル振れやラジアルすきまを測定することが開示されている。
【特許文献1】特開昭55−39009号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ラジアルすきまは、1回転するのに伴ってその値が変化するにもかかわらず、上記従来のラジアルすきまの測定方法は、外輪に対して内輪を相対的に回転させることなく、一点で内輪および外輪のいずれか一方を正逆両方向に変位させてラジアルすきまを求めるものであり、その後に、転がり軸受をハウジングや回転軸に取り付ける場合に、有用な値として利用しにくいものとなっている。ラジアルすきまの測定精度を向上するためには、軸受を回転させ、測定を一点でなく多点で行い、ばらつきを知ることが好ましいが、多点で測定を行うと1つの軸受の測定にかかる時間(サイクルタイム)が長くなるという問題が発生する。
【0005】
特許文献1には、内輪を回転させてラジアル振れを測定することが開示されているが、ラジアル振れは、360°回転させたときのラジアル方向変位の振れを見るもので、ラジアル振れからラジアルすきまを求めることは困難である。
【0006】
この発明の目的は、サイクルタイムの増加を抑えてラジアルすきまの測定精度を向上させることができる転がり軸受のすきま測定方法を提供することにある。
【課題を解決するための手段】
【0007】
この発明による転がり軸受のすきま測定方法は、内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受のラジアルすきまを測定する方法であって、内輪および外輪のいずれか一方を回転不可能に保持する工程と、外輪に対して内輪を相対的に回転させて第1の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の位置における移動量を測定する工程と、第1の位置から外輪に対して内輪を位相にして180°分相対的に回転させて第2の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第2の位置における移動量を測定する工程と、第1および第2の位置における外輪移動量から転がり軸受のラジアルすきまを求める工程とを含んでおり、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うことを特徴とするものである。
【0008】
この発明による転がり軸受のすきま測定方法を実施するすきま測定装置は、例えば、駆動手段によって回転させられる駆動軸と、駆動軸に内輪を結合する内輪クランプ手段と、駆動軸の軸線回りの位相角度を検出する位相角度検知手段と、外輪を保持する外輪クランプ手段と、外輪クランプ手段を支持して軸線方向と直交する方向に移動可能な可動テーブルと、可動テーブルに軸線方向と直交する方向の荷重を負荷する荷重負荷手段と、可動テーブルに荷重が負荷された際の外輪の移動量を検知する例えば差動トランスのような外輪移動量検出手段と、外輪の移動量から玉軸受のラジアルすきまを求める演算手段とを備えているものとされる。
【0009】
転がり軸受は、例えば玉軸受とされるが、ころ軸受など他の転がり軸受であってもよい。
【0010】
ラジアルすきまの検出前に、一方向から荷重をかけながら予備回転を行うことが好ましく、これにより、転がり軸受の転動体が軌道底に移動するので、適正なラジアルすきまを得ることができる。この場合、軸受の軸方向を水平にすることで、転動体が軌道底に移動しやすくなり、より軽荷重で精度のよい測定を行うことができる。
【0011】
荷重を負荷するに際しては、外輪を軸方向に対して直角の両方向に移動可能とすることが好ましい。内輪は、外輪に荷重が負荷された状態で回転させられ、予備回転後には、内輪を1ピッチ=360°/(2m+1),m:自然数ずつ回転可能とし、一方向に荷重を負荷して外輪移動量を測定した後は、逆方向に荷重を負荷して内輪を1ピッチだけ回転させて、外輪移動量を測定し、次いで、正方向に荷重を負荷して内輪を1ピッチだけ回転させて、外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得ることが好ましい。そして、同じ位置で一方向と逆方向に荷重を負荷したときのそれぞれの外輪移動量から1つのラジアルすきま(移動量の絶対値の和)を求め、他の位置でも同様にしてラジアルすきまを求め、少なくとも計(2m+1)個のラジアルすきまを平均することでラジアルすきまが求められる。こうして、1回転360°を奇数回に分割して等角度ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、負荷回数に対するサイクルタイムの影響を小さくすることができる。
【0012】
3等配の箇所でのラジアルすきまの測定は、具体的には、例えば、外輪クランプ手段の移動量を検出する差動トランスを使用して、次の順序で行われる。
【0013】
(a)外輪をクランプした後、+方向に負荷をかけ、内輪を予備回転(回転方向はどちらでも可)させる。
【0014】
(b)予備回転後のある位置の差動トランス値を記憶。
【0015】
(c)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0016】
(d)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0017】
(e)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0018】
(f)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0019】
(g)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0020】
(h)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0021】
(i)次いで、−方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0022】
(j)次いで、+方向負荷に変更し内輪が120°回転時の差動トランス値を記憶。
【0023】
(k)A〜C各位置の+方向変位と−方向変位の差(移動量の和)が各位置でのラジアルすきまとなるので、転動体の位置関係のばらつきを考慮して、|(h)−(e)|,|(e)−(b)|,|(i)−(f)|,|(f)−(c)|,|(j)−(g)|および|(g)−(d)|の6データの平均値をラジアルすきまとする。また、これらの6データの最大値を最大ラジアルすきま、最小値を最小ラジアルすきまとして記録する。
【発明の効果】
【0024】
この発明の転がり軸受のすきま測定方法によると、第1の位置における移動量を測定した後、内輪および外輪のいずれか一方を180°回転させて第2の位置における移動量を測定して、これらの移動量からラジアルすきまを求めるので、第1の位置だけで正逆両方向に変位させてラジアルすきまを求める従来のものに比べて、精度を向上することができ、また、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うので、サイクルタイムが長くなることを防止することができる。
【0025】
そして、1回転360°を奇数回に分割して等角度ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、測定点の数を増やすことでラジアルすきまのばらつき、最大値および最小値が分かるので、有用なラジアルすきまを精度よく得ることができ、しかも、これを得るためのサイクルタイムの増加を小さいものとすることができる。
【発明を実施するための最良の形態】
【0026】
この発明の実施の形態を、以下図面を参照して説明する。以下の説明において、図1の上下を上下といい、図1および図2の左を前、同右を後というものとする。
【0027】
図1および図2は、この発明による転がり軸受のすきま測定方法を実施するためのすきま測定装置を示している。
【0028】
この発明によるすきま測定方法が対象としている転がり軸受(1)は、内輪(2)、外輪(3)、両輪(2)(3)間に配置された複数の転動体(例えば玉)(4)、および複数の転動体(5)を保持する保持器(5)を備えている。
【0029】
転がり軸受のすきま測定装置(11)は、ケーシング(12)内に回転自在に支持されて駆動手段(13)によって回転させられる上下方向にのびる駆動軸(14)と、駆動軸(14)に内輪(2)を結合する内輪クランプ手段(15)と、駆動軸(14)の軸線回りの位相角度を検出する位相角度検知手段(16)と、前後1対のアーム(18)を有し外輪(3)を保持する外輪クランプ手段(17)と、外輪クランプ手段(17)を支持して前後方向(軸線方向と直交する方向)に移動可能な可動テーブル(19)と、可動テーブル(19)を案内する前後方向にのびる1対のガイドレール(20)と、可動テーブル(19)に前後方向の荷重を負荷する荷重負荷手段(21)と、可動テーブル(19)に荷重が負荷された際の外輪(3)の移動量を検知する外輪移動量検出手段(22)と、外輪(3)の移動量から玉軸受(5)のラジアルすきまを求める演算手段(23)とを備えている。
【0030】
駆動手段(13)は、駆動軸(14)に固定された従動プーリ(31)と、従動プーリ(31)とベルト(32)によって結合された駆動プーリ(図示略)と、駆動プーリを駆動するモータ(33)とを有している。
【0031】
内輪クランプ手段(15)は、中空状とされた駆動軸(14)の内部に挿通されて先端に設けられた内輪嵌入用軸部(35)を駆動軸(14)から突出させた支持軸(34)と、内輪嵌入用軸部(35)に嵌め合わせられた内輪(2)に上方(軸方向先端側)から当てがわれる内輪クランプ治具(36)と、内輪クランプ治具(36)を内輪(2)に一体化するために内輪嵌入用軸部(35)にねじ合わされるおねじ部材(37)とを有している。
【0032】
位相角度検知手段(16)は、ロータリーエンコーダ(38)と、ロータリーエンコーダ(38)の入力軸(38a)と駆動軸(14)とを結合するギヤ(39)(40)とを有している。
【0033】
外輪クランプ手段(17)は、前後アーム(18)がそれぞれ取り付けられた前後1対のスライダ(41)と、スライダ(41)を案内するガイドレール(42)と、各スライダ(41)を互いに接近または離隔する方向に移動させるスライダ駆動手段(43)とを有している。外輪(3)は、前後アーム(18)によって径方向対称位置から挟持され、この状態で、可動テーブル(19)が前後方向に移動させられることで、外輪(3)に荷重が負荷される。外輪(3)をクランプする方向と可動テーブル(19)の移動方向とは、いずれも前後方向(互いに平行)とされている。
【0034】
荷重負荷手段(21)は、前後方向にのびるシリンダーロッド(45)を前進・後退させる流体圧シリンダー(44)と、可動テーブル(19)に固定されてシリンダーロッド(45)を挿通させるばね受け部材(46)と、シリンダーロッド(45)の基端部とばね受け部材(46)との間に配置された前進方向負荷ばね(47)と、シリンダーロッド(45)の先端部とばね受け部材(46)との間に配置された後退方向負荷ばね(48)とを有している。したがって、シリンダーロッド(45)を前進(左方に移動)させると、可動テーブル(19)は、前進方向負荷ばね(47)によって前進方向(以下では「+方向」と称す)に付勢され、また、シリンダーロッド(45)を後退(右方に移動)させると、可動テーブル(19)は、後退方向負荷ばね(48)によって後退方向(以下では「−方向」と称す)に付勢される。測定荷重は、フリー方向に回転させたときに一方向クラッチ(4)が離脱して、軸受(5)(6)だけで荷重を負荷できるように設定される。
【0035】
外輪移動量検出手段(22)は、外輪(3)の前後方向移動量=前後アーム(18)の前後方向移動量であることに基づいて、外輪(3)の前後方向移動量を求めるもので、装置に固定されている支持ブラケット(49)に支持されて前後アーム(18)の前後方向移動量を検出する差動トランス(50)を有している。
【0036】
図3を参照して、上記のすきま測定装置(11)を使用して転がり軸受(1)のラジアルすきまを測定するステップを説明する。ここで、駆動軸(14)は、回転角度にして120°ずつ回転させられ、荷重負荷手段(21)は、この間に、+方向または−方向のいずれかに移動させられる。
【0037】
まず、転がり軸受(1)の転動体(4)を軌道底に移動させるために、図3(a)に示すように、外輪(3)をクランプした状態で、+方向に負荷をかけ、内輪(2)を予備回転(方向はどちらでも可)させる。
【0038】
次いで、図3(b)に示すように、予備回転後のある位置の差動トランス値<+A>を記憶させる。
【0039】
次いで、図3(c)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−B>を記憶する。
【0040】
次いで、図3(d)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+C>を記憶する。
【0041】
次いで、図3(e)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−A>を記憶する。
【0042】
次いで、図3(f)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+B>を記憶する。
【0043】
次いで、図3(g)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−C>を記憶する。
【0044】
次いで、図3(h)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+A>を記憶する。
【0045】
次いで、図3(i)に示すように、−方向負荷に変更し内輪が120°回転時の差動トランス値<−B>を記憶する。
【0046】
次いで、図3(j)に示すように、+方向負荷に変更し内輪が120°回転時の差動トランス値<+C>を記憶する。
【0047】
上記(b)〜(j)の操作において、A〜C各位置の+方向変位と−方向変位の差(移動量の和)が各位置でのラジアルすきまとなり、演算手段(23)においては、|(h)−(e)|=<+A>−<−A>,|(e)−(b)|=<+A>−<−A>,|(i)−(f)|=<+B>−<−B>,|(f)−(c)|=<+B>−<−B>,|(j)−(g)|=<+C>−<−C>および|(g)−(d)|=<+C>−<−C>の6データが得られる。したがって、例えばこれらの平均値を玉軸受(5)のラジアルすきまとすればよい。また、これらの6データの最大値を最大ラジアルすきま、最小値を最小ラジアルすきまとして、これが最大または最小ラジアルすきまの基準値を超えたものについては、ラジアルすきま異常として排除される。得られた最大ラジアルすきま、最小ラジアルすきまおよび平均ラジアルすきまは、この転がり軸受(1)をハウジングや回転軸に取り付ける際などに利用される。
【0048】
こうして、1回転360°を奇数回(3回)に分割して等角度(120°)ずつ回転させるとともに、負荷の方向を交互に変更していくことにより、負荷回数に対するサイクルタイムの影響を小さくすることができる。
【0049】
上記一連の測定の後、外輪を例えば周方向に所定角度(90°ずつ、120°ずつ、180°ずつなど)回転させ、同様の測定を行うことにより、外輪についても、一点でなく多点における測定を行うことで、より精度の高いラジアルすきまを得ることができる。
【0050】
なお、上記において、内輪を回転させて、外輪を軸方向に直角の方向に移動させているが、外輪を回転させて、内輪を軸方向に直角の方向に移動させてもよい。
【図面の簡単な説明】
【0051】
【図1】図1は、この発明による転がり軸受のすきま測定方法を実施する装置の1例を示す縦断面図である。
【図2】図2は、同平面図である。
【図3】図3は、この発明による転がり軸受のすきま測定方法の1実施形態を順を追って説明する縦断面図である。
【符号の説明】
【0052】
(1) 転がり軸受
(2) 内輪
(3) 外輪
(4) 玉(転動体)
(11) すきま測定装置
【特許請求の範囲】
【請求項1】
内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受のラジアルすきまを測定する方法であって、
内輪および外輪のいずれか一方を回転不可能に保持する工程と、外輪に対して内輪を相対的に回転させて第1の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の位置における移動量を測定する工程と、第1の位置から外輪に対して内輪を位相にして180°分相対的に回転させて第2の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第2の位置における移動量を測定する工程と、第1および第2の位置における外輪移動量から転がり軸受のラジアルすきまを求める工程とを含んでおり、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うことを特徴とする転がり軸受のすきま測定方法。
【請求項2】
外輪を軸方向に対して直角の両方向に移動可能とするとともに、内輪を1ピッチ=360°/(2m+1),m:自然数ずつ回転可能とし、一方向に荷重を負荷して外輪移動量を測定した後は、内輪を1ピッチだけ回転させるとともに、逆方向に荷重を負荷して外輪移動量を測定し、次いで、内輪を1ピッチだけ回転させるとともに、正方向に荷重を負荷して外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得ることを特徴とする請求項1の転がり軸受のすきま測定方法。
【請求項1】
内輪、外輪、両輪間に配置された複数の転動体を備えている転がり軸受のラジアルすきまを測定する方法であって、
内輪および外輪のいずれか一方を回転不可能に保持する工程と、外輪に対して内輪を相対的に回転させて第1の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第1の位置における移動量を測定する工程と、第1の位置から外輪に対して内輪を位相にして180°分相対的に回転させて第2の位置において停止させる工程と、内輪および外輪のいずれか一方を軸方向に対して直角方向に移動させて第2の位置における移動量を測定する工程と、第1および第2の位置における外輪移動量から転がり軸受のラジアルすきまを求める工程とを含んでおり、外輪に対して内輪を相対的に回転させながら、内輪および外輪のいずれか一方の軸方向移動を行うことを特徴とする転がり軸受のすきま測定方法。
【請求項2】
外輪を軸方向に対して直角の両方向に移動可能とするとともに、内輪を1ピッチ=360°/(2m+1),m:自然数ずつ回転可能とし、一方向に荷重を負荷して外輪移動量を測定した後は、内輪を1ピッチだけ回転させるとともに、逆方向に荷重を負荷して外輪移動量を測定し、次いで、内輪を1ピッチだけ回転させるとともに、正方向に荷重を負荷して外輪移動量を測定し、これを繰り返すことで第1から第nまでの位置における外輪移動量を得ることを特徴とする請求項1の転がり軸受のすきま測定方法。
【図1】


【図2】

【図3】
【図2】
【図3】
【公開番号】特開2009−80060(P2009−80060A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−250491(P2007−250491)
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
[ Back to top ]