
転がり軸受の異常診断装置および歯車の異常診断装置
【課題】キズや剥離等の転がり軸受の異常を感度良くかつ正確に診断可能な転がり軸受の異常診断装置を提供する。
【解決手段】異常診断装置は、転がり軸受の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて転がり軸受の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形(k1)を、各パルス状波形の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形(k2)に変換する。診断部は、逆のこぎり波状波形(k2)に基づいて転がり軸受の異常を診断する。
【解決手段】異常診断装置は、転がり軸受の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて転がり軸受の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形(k1)を、各パルス状波形の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形(k2)に変換する。診断部は、逆のこぎり波状波形(k2)に基づいて転がり軸受の異常を診断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、転がり軸受の異常診断装置および歯車の異常診断装置に関し、特に、転がり軸受や歯車の回転時に発生する振動や音を測定することによって、転がり軸受のキズや剥離等の異常や歯車の歯欠け等の異常を診断する技術に関する。
【背景技術】
【0002】
転がり軸受に生じたキズや剥離等の異常を診断する手法として、転がり軸受の回転時に発生する振動や音を振動センサやマイクロホンによって測定し、その測定された信号のエンベロープ波形(包絡線)を生成し、それを周波数分析して得られる周波数スペクトルのピークレベルを評価する手法が知られている(たとえば特許文献1や特許文献2参照。)。
【0003】
なお、エンベロープ波形を生成する手法については、絶対値検波後にローパスフィルタ(LPF)を適用することによってエンベロープ波形を生成する手法が周知であり、市販の計測機器にも広く搭載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−146762号公報
【特許文献2】特開2001−21453号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
転がり軸受に生じたキズや剥離等により、転がり軸受の回転時にパルス状の振動が周期的に発生する。このキズや剥離等により生じるパルス状波形の幅(パルス幅)は数ミリ秒〜数十ミリ秒と狭い場合が多く、その信号パワーは非常に小さい。そのため、特にキズや剥離の程度が小さい場合には、エンベロープ波形を周波数分析して得られる周波数スペクトルのピークレベルが低く、十分なS/N比を得られない場合がある。
【0006】
また、キズや剥離等の欠陥により生じるパルス状波形のパルス幅は、欠陥の形状によって変化し得る。ここで、周波数スペクトルのピークレベルは、パルス状波形の振幅とパルス幅とにほぼ比例し、パルス幅が変化すると周波数スペクトルのピークレベルが変化する。したがって、欠陥の形状の違いによって周波数スペクトルのピークレベルがばらつき、その結果、異常診断を誤判定する可能性がある。
【0007】
なお、このような問題は、異常が発生することによりパルス状の振動が周期的に発生する機器全般に適用可能であり、たとえば、歯車において歯欠け等の欠陥が生じたときも同様の問題が発生し得る。
【0008】
そこで、この発明は、かかる問題を解決するためになされたものであり、その目的は、キズや剥離等の転がり軸受の異常を感度良くかつ正確に診断可能な転がり軸受の異常診断装置を提供することである。
【0009】
また、この発明の別の目的は、歯車の歯欠け等の異常を感度良くかつ正確に診断可能な歯車の異常診断装置を提供することである。
【課題を解決するための手段】
【0010】
この発明によれば、転がり軸受の異常診断装置は、転がり軸受の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて転がり軸受の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形を、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。診断部は、逆のこぎり波状波形に基づいて転がり軸受の異常を診断する。
【0011】
好ましくは、変換部は、振動波形を整流する整流部と、所定の時定数を有する包絡線検波部とを含む。包絡線検波部は、整流部の出力を受ける。時定数は、包絡線検波部の出力波形にダイアゴナルクリッピング歪み(「袈裟切り歪み」とも称される。)が生じるように設定される。逆のこぎり波状波形は、包絡線検波部の出力波形においてダイアゴナルクリッピング歪みが生じたものである。
【0012】
さらに好ましくは、時定数は、パルス状波形の発生周期の0.1〜2.0倍に設定される。
【0013】
好ましくは、整流部および包絡線検波部は、整流部に対応する整流回路と、包絡線検波部を形成する抵抗器およびコンデンサとを含むアナログ電子回路によって構成される。
【0014】
さらに好ましくは、抵抗器は、抵抗値を変更可能な可変抵抗器である。そして、可変抵抗器の抵抗値を調整することによって時定数が設定される。
【0015】
さらに好ましくは、可変抵抗器の抵抗値は、転がり軸受の仕様および回転速度に基づいて調整される。
【0016】
また、好ましくは、処理部は、A/D変換器をさらに含む。A/D変換器は、センサからのアナログ信号をデジタル信号に変換して変換部へ出力する。整流部および包絡線検波部は、予め準備されたプログラムに従って動作するソフトウェア処理によって構成される。
【0017】
さらに好ましくは、包絡線検波部は、時定数を設定するための調整パラメータを有する。
【0018】
さらに好ましくは、調整パラメータは、転がり軸受の仕様および回転速度に基づいて自動調整される。
【0019】
好ましくは、整流部は、全波整流回路を含む。
また、好ましくは、整流部は、半波整流回路を含む。
【0020】
好ましくは、処理部は、周波数分析部をさらに含む。周波数分析部は、逆のこぎり波状波形の周波数スペクトルを出力する。診断部は、周波数スペクトルのピークレベルに基づいて転がり軸受の異常を診断する。
【0021】
また、好ましくは、処理部は、実効値演算部をさらに含む。実効値演算部は、逆のこぎり波状波形の交流成分の実効値を出力する。診断部は、逆のこぎり波状波形の交流成分の実効値に基づいて転がり軸受の異常を診断する。
【0022】
好ましくは、センサは、加速度センサ、速度センサおよび変位センサのいずれかを含む。
【0023】
また、好ましくは、センサは、転がり軸受の振動音を検出するマイクロホンを含む。
また、好ましくは、センサは、転がり軸受のトルクを検出するためのトルクセンサを含む。
【0024】
また、この発明によれば、歯車の異常診断装置は、歯車の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて歯車の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形を、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。診断部は、逆のこぎり波状波形に基づいて歯車の異常を診断する。
【発明の効果】
【0025】
この発明においては、転がり軸受や歯車の異常により振動波形に周期的に表われるパルス状波形が、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換される。このような逆のこぎり波状波形は、ダイアゴナルクリッピング歪みとして従来は避けるべきものとされていたが、この発明においては、この歪みが積極的に活用される。
【0026】
すなわち、変換部による変換後の逆のこぎり波状波形の信号幅はエンベロープ波形よりも広いので、信号パワーが大きい。これにより、周波数分析して得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0027】
また、逆のこぎり波状波形の信号幅は一定であるので、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けず、パルス状波形の振幅(パルス高さ)のみの影響を受けることとなる。すなわち、周波数スペクトルのピークレベルは、欠陥の形状の影響は受けず、欠陥の大きさのみの影響を受けることとなる。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0028】
したがって、この発明によれば、キズや剥離等の転がり軸受の異常や歯欠け等の歯車の異常を感度良くかつ正確に診断することができる。
【図面の簡単な説明】
【0029】
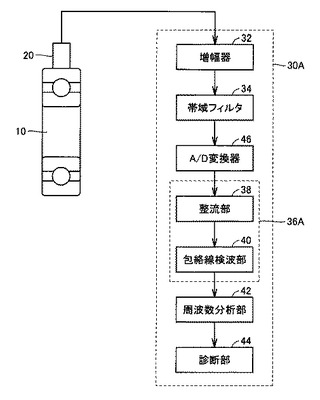
【図1】この発明の実施の形態1による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
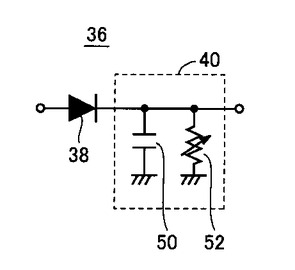
【図2】図1に示す変換部の回路図である。
【図3】パルス状波形の発生周期に対する時定数の比と、逆のこぎり波状波形の交流成分の実効値との関係を示した図である。
【図4】変換部から出力される逆のこぎり波状波形を示した図である。
【図5】従来のエンベロープ波形を示した図である。
【図6】図4に示す逆のこぎり波状波形の周波数スペクトルを示した図である。
【図7】図5に示すエンベロープ波形の周波数スペクトルを示した図である。
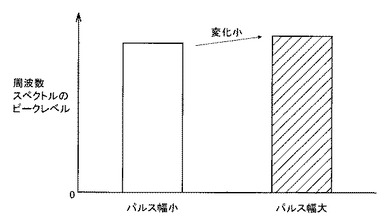
【図8】パルス幅が異なるパルス状波形に対しての、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化を示した図である。
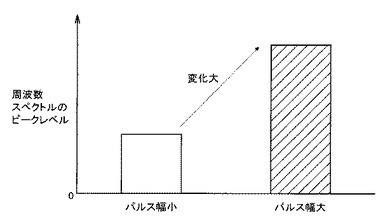
【図9】パルス幅が異なるパルス状波形に対しての、従来のエンベロープ波形の周波数スペクトルにおけるピークレベルの変化を示した図である。
【図10】実施の形態1の変形例における変換部の回路図である。
【図11】実施の形態2による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
【図12】図11に示す包絡線検波部においてソフトウェアにより実行される処理手順を説明するためのフローチャートである。
【図13】実施の形態3による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
【図14】図13に示す実効値算出部の回路図である。
【図15】歯車の異常診断装置の構成を示すブロック図である。
【発明を実施するための形態】
【0030】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0031】
[実施の形態1]
図1は、この発明の実施の形態1による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図1を参照して、異常診断装置は、振動センサ20と、信号処理部30とを備える。
【0032】
振動センサ20は、転がり軸受10に固設される。そして、振動センサ20は、転がり軸受10の振動を検出し、検出信号を信号処理部30へ出力する。振動センサ20は、たとえば、圧電素子を用いた加速度センサによって構成される。転がり軸受10は、図示されない回転部材の回転軸を回転自在に支持する。転がり軸受10は、たとえば、自動調芯ころ軸受や円すいころ軸受、円筒ころ軸受、玉軸受等によって構成される。なお、転がり軸受10は、単列のものでも複列のものでもよい。
【0033】
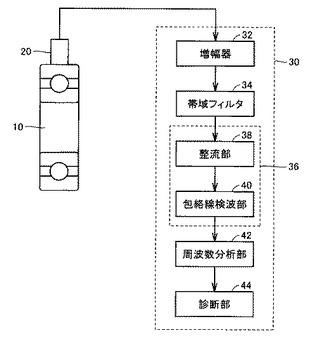
信号処理部30は、増幅器32と、帯域フィルタ34と、変換部36と、周波数分析部42と、診断部44とを含む。増幅器32は、振動センサ20から出力される検出信号を受け、その受けた検出信号を所定のゲインで増幅する。帯域フィルタ34は、増幅器32の出力を受け、予め定められた周波数帯域のみの信号を取り出して変換部36へ出力する。
【0034】
変換部36は、帯域フィルタ34から出力される振動波形に周期的に表われるパルス状波形を、そのパルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。より詳しくは、変換部36は、整流部38と、包絡線検波部40とを含む。整流部38は、帯域フィルタ34から出力される振動波形を絶対値に整流する。包絡線検波部40は、整流部38の出力を受け、所定の時定数を有する。
【0035】
ここで、包絡線検波部40の時定数は、包絡線検波部40の出力波形にダイアゴナルクリッピング歪みが生じるように設定される。ダイアゴナルクリッピング歪みとは、出力波形の立下がりの傾斜が本来の包絡線の傾斜よりも緩やかになる歪みであり、一般的には、ダイアゴナルクリッピング歪みは避けるべきものとされているが、この実施の形態1においては、このダイアゴナルクリッピング歪みが積極的に活用される。そして、包絡線検波部40は、パルス状波形の包絡線に対してダイアゴナルクリッピング歪みを生じさせた、逆のこぎり波状の波形を出力する。
【0036】
ダイアゴナルクリッピング歪みを積極的に生じるように包絡線検波部40の時定数を設定するのは、周波数分析部42に与えられる信号のパワーを増加させ、かつ、信号幅を一定にするためである。すなわち、ダイアゴナルクリッピング歪みにより、パルス状波形に対応する出力波形の信号幅が拡大され、信号パワーが増加する。これにより、周波数分析部42により得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0037】
また、ダイアゴナルクリッピング歪みにより、パルス状波形に対応する出力波形の信号幅は、時定数によって定まる一定幅となる。したがって、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けなくなり、すなわち、欠陥の形状の影響を受けなくなる。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0038】
周波数分析部42は、変換部36から出力される逆のこぎり波状波形の周波数スペクトルを算出し、その算出結果を診断部44へ出力する。一例として、周波数分析部42は、変換部36から受ける逆のこぎり波状波形に対して高速フーリエ変換(FFT)処理を行なうことによって、逆のこぎり波状波形の周波数スペクトルを算出する。
【0039】
診断部44は、周波数分析部42から受ける逆のこぎり波状波形の周波数スペクトルに基づいて転がり軸受10の異常を診断する。具体的には、転がり軸受10の内部においてキズや剥離等の損傷が発生すると、損傷部位(内輪、外輪、転動体)に応じて、軸受内部の幾何学的構造および回転速度から理論的に決定される特定の周波数に振動のピークが発生する。そこで、診断部44は、周波数スペクトルのピーク周波数およびピークレベルに基づいて、異常発生部位を診断することができる。
【0040】
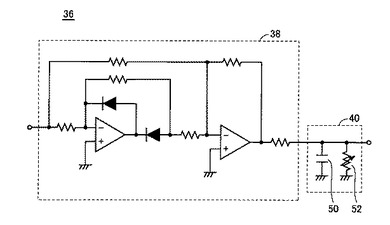
図2は、図1に示した変換部36の回路図である。図2を参照して、上述のように、変換部36は、整流部38と、包絡線検波部40とを含む。整流部38は、複数のオペアンプ、ダイオードおよび抵抗素子を含む全波整流回路である。包絡線検波部40は、整流部38の出力側に設けられ、コンデンサ50と、抵抗器52とを含む。
【0041】
コンデンサ50および抵抗器52は、整流部38の出力線と接地ノードとの間に並列に接続される。このコンデンサ50の容量値および抵抗器52の抵抗値によって包絡線検波部40の時定数が決まる。そして、包絡線検波部40の出力波形にダイアゴナルクリッピング歪みを生じるような時定数が設定されるように、コンデンサ50の容量値および抵抗器52の抵抗値が設定される。
【0042】
ここで、転がり軸受10の仕様や回転速度によってパルス状波形の発生周期は変化するので、パルス状波形の発生周期の変化に応じて時定数を変更する必要がある。そこで、この実施の形態1では、抵抗器52は、可変抵抗器によって構成され、転がり軸受10の仕様や回転速度に応じて抵抗器52の抵抗値が調整される。一例として、軸受の仕様や回転速度と時定数と抵抗器52の抵抗値との関係を予め定めておき、時定数が所望の値になるように、転がり軸受10の仕様や回転速度に基づいて抵抗器52の抵抗値を自動調整するようにしてもよい。
【0043】
なお、抵抗器52を可変抵抗器とすることに代えて、または抵抗器52を可変抵抗器によって構成するとともに、コンデンサ50を可変コンデンサによって構成し、転がり軸受10の仕様や回転速度に応じてコンデンサ50の容量値を調整してもよい。
【0044】
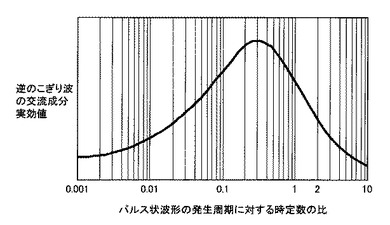
図3は、パルス状波形の発生周期に対する時定数の比と、逆のこぎり波状波形の交流成分の実効値との関係を示した図である。図3を参照して、包絡線検波部40の時定数を変化させると、逆のこぎり波状波形の交流成分の実効値にピークが発生する。そして、逆のこぎり波状波形の交流成分の実効値が大きいほど、周波数分析部42により得られる周波数スペクトルのピークレベルは高くなる。
【0045】
図3に示されるように、時定数は、パルス状波形の発生周期に近い値が望ましい。パルス状波形の発生周期に対して時定数が小さすぎると、逆のこぎり波状波形を生成できず(包絡線に近づく)、時定数が大きすぎると、パルス状波形のピーク値がホールドされたような波形となる(変動が小さくなる)。そこで、たとえば、包絡線検波部40の時定数は、パルス状波形の発生周期の0.1〜2.0倍の範囲に設定するのが好ましい。
【0046】
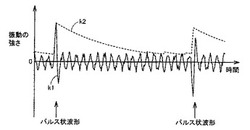
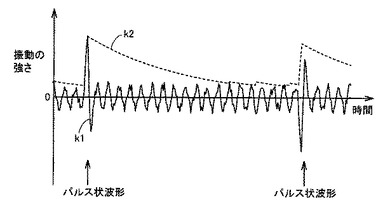
図4は、変換部36から出力される逆のこぎり波状波形を示した図である。図4を参照して、実線k1は、変換部36による変換前のパルス状波形を示し、点線k2は、変換部36によって得られる逆のこぎり波状波形を示す。なお、実線k1におけるパルス状波形間の小刻みな振動はノイズであり、ここでいうパルス状波形に該当するものではない。
【0047】
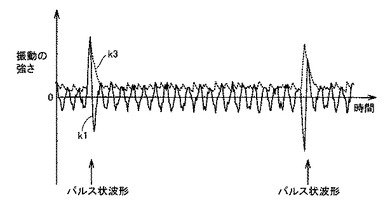
また、比較例として、従来のエンベロープ波形を図5に示す。図5を参照して、点線k3が、実線k1にエンベロープ処理を行なうことによって得られるエンベロープ波形(包絡線)を示す。
【0048】
図4,5を参照して、逆のこぎり波状波形(点線k2)の信号幅は、エンベロープ波形(点線k3)の信号幅よりも広い。また、特に図示されないが、欠陥の形状が図の状況時と異なることにより実線k1におけるパルス状波形のパルス幅が変化しても、逆のこぎり波状波形(点線k2)の信号幅は一定となる(一方、エンベロープ波形(点線k3)の信号幅は変化する。)。
【0049】
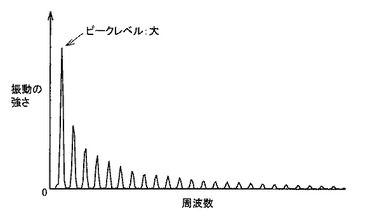
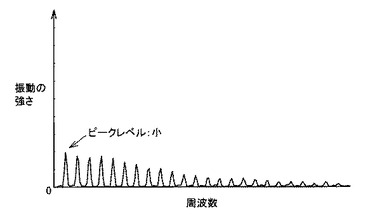
図6は、図4に示した逆のこぎり波状波形の周波数スペクトルを示した図である。なお、比較例として、図5に示したエンベロープ波形の周波数スペクトルを図7に示す。
【0050】
図6,7を参照して、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの方が、エンベロープ波形の周波数スペクトルにおけるピークレベルよりも高い。これは、図4,5に示したように、逆のこぎり波状波形の信号幅はエンベロープ波形の信号幅よりも広く、逆のこぎり波状波形の信号パワーの方がエンベロープ波形の信号パワーよりも大きいからである。これにより、逆のこぎり波状波形を用いることによって、従来のエンベロープ波形を用いるよりもS/N比が向上する。
【0051】
図8は、パルス幅が異なるパルス状波形に対しての、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化を示した図である。なお、比較例として、従来のエンベロープ波形における周波数スペクトルのピークレベルの変化を図9に示す。
【0052】
図8,9を参照して、パルス幅が異なるパルス状波形に対して、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化は小さい。一方、エンベロープ波形の場合には、パルス幅が異なるパルス状波形に対して、周波数スペクトルのピークレベルの変化が大きい。これは、逆のこぎり波状波形の信号幅は、パルス幅が変化しても一定であり、一方、パルス幅の変化に応じてエンベロープ波形の信号幅は変化するからである。
【0053】
以上のように、この実施の形態1においては、転がり軸受10の異常により周期的に発生するパルス状波形が変換部36によって逆のこぎり波状波形に変換される。逆のこぎり波状波形の信号幅はエンベロープ波形よりも広く、信号パワーが大きい。これにより、周波数分析して得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0054】
また、逆のこぎり波状波形の信号幅は一定であるので、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けず、パルス状波形の振幅(パルス高さ)のみの影響を受ける。すなわち、周波数スペクトルのピークレベルは、欠陥の形状の影響は受けず、欠陥の大きさのみの影響を受ける。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0055】
したがって、この実施の形態1によれば、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0056】
[実施の形態1の変形例]
上記の実施の形態1においては、変換部36の整流部38は、全波整流回路によって構成されるものとしたが、全波整流回路に代えて半波整流回路で整流部38を構成してもよい。
【0057】
図10は、実施の形態1の変形例における変換部36の回路図である。図10を参照して、変換部36の整流部38は、半波整流用ダイオードを含む。なお、包絡線検波部40の構成は、図2に示した実施の形態1と同じである。
【0058】
この実施の形態1の変形例によれば、変換部36を小型化することができ、信号処理部も安価に実現することができる。
【0059】
[実施の形態2]
実施の形態1およびその変形例では、変換部36は、図2に示したアナログ電子回路によって構成されるものとしたが、この実施の形態2では、ソフトウェア処理によって実現される。
【0060】
図11は、実施の形態2による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図11を参照して、この異常診断装置は、振動センサ20と、信号処理部30Aとを備える。信号処理部30Aは、図1に示した実施の形態1における信号処理部30の構成において、A/D変換器46をさらに含み、変換部36に代えて変換部36Aを含む。
【0061】
A/D変換器46は、帯域フィルタ34を通過したアナログ信号を所定のサンプリング周波数でサンプリングし、デジタル信号に変換する。変換部36Aは、振動波形に周期的に表われるパルス状波形であってA/D変換器46によりデジタル信号に変換されたものを、そのパルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。この変換部36Aも、整流部38と、包絡線検波部40とを含む。整流部38および包絡線検波部40の各々の機能は、実施の形態1で説明した通りである。
【0062】
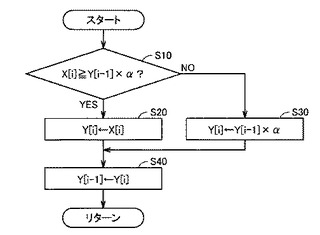
図12は、図11に示した包絡線検波部40においてソフトウェアにより実行される処理手順を説明するためのフローチャートである。なお、このフローチャートに示される処理は、予め定められた演算周期毎に実行される。
【0063】
図12を参照して、包絡線検波部40は、整流部38から受ける入力信号X[i](iは信号が離散化されていることを示し、[i]は今回値を示し、[i−1]は前回演算時の値を示す。)が、前回演算時の出力信号Y[i−1]に係数αを乗じた値以上であるか否かを判定する(ステップS10)。なお、係数αは、包絡線検波部40の時定数を決定するための値であり、Y[i−1]×αは、係数αに応じた時定数で減衰する信号を示す。
【0064】
ステップS10において、入力信号X[i]が出力信号Y[i−1]×α以上であると判定されると(ステップS10においてYES)、包絡線検波部40は、入力信号X[i]を出力信号Y[i]に代入する(ステップS20)。一方、ステップS10において、入力信号X[i]が出力信号Y[i−1]×αよりも小さいと判定されると(ステップS10においてNO)、包絡線検波部40は、Y[i−1]×αの値を出力信号Y[i]に代入する(ステップS30)。すなわち、包絡線検波部40は、係数αに応じた時定数で減衰する信号Y[i−1]×αを入力信号X[i]と比較し、値が大きい方を出力信号Y[i]とする。
【0065】
その後、包絡線検波部40は、出力信号Y[i]をY[i−1]に代入する(ステップS40)。なお、Y[i−1]は、次回の演算時に用いられる。
【0066】
なお、係数αは、次式に基づいて算出することができる。
α=(1/e)1/(τ×fs) …(1)
ここで、eは自然対数の底であり、τは時定数を示し、fsはA/D変換器46のサンプリング周波数を示す。たとえば、転がり軸受10の仕様および回転速度に基づいてパルス状波形の発生周期を推定できるので、包絡線検波部40の時定数がパルス状波形の発生周期の0.1〜2.0倍となるように転がり軸受10の仕様および回転速度に基づいて時定数τを調整し、上記(1)式に基づいて係数αを調整することができる。
【0067】
この実施の形態2によっても、実施の形態1と同様に、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0068】
[実施の形態3]
上記の各実施の形態においては、変換部36により生成される逆のこぎり波状波形を周波数分析することによって転がり軸受10の異常診断を行なうものとした。この実施の形態3では、周波数分析に代えて逆のこぎり波状波形の交流成分の実効値(「RMS(Root Mean Square)値」とも称される。)が算出され、その算出結果に基づいて転がり軸受10の異常診断が行なわれる。
【0069】
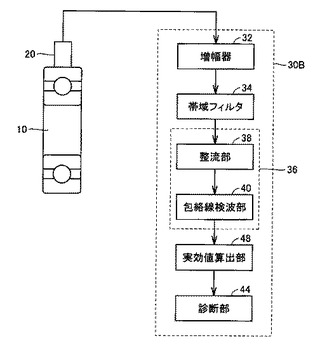
図13は、実施の形態3による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図13を参照して、この異常診断装置は、振動センサ20と、信号処理部30Bとを備える。信号処理部30Bは、図1に示した実施の形態1における信号処理部30の構成において、周波数分析部42に代えて実効値算出部48を含む。
【0070】
実効値算出部48は、変換部36によって生成される逆のこぎり波状波形の交流成分の実効値を算出する。そして、診断部44は、実効値算出部48から受ける逆のこぎり波状波形の交流成分の実効値に基づいて転がり軸受10の異常を診断する。
【0071】
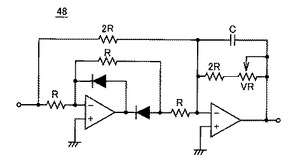
図14は、図13に示した実効値算出部48の回路図である。図14を参照して、この回路は、入力信号を絶対値に整流する整流部と、整流部の出力側に設けられる低域通過フィルタ(LPF)とから成る。
【0072】
なお、特に図示しないが、実効値算出部48には、市販の実効値変換用ICを用いてもよい。また、実効値算出部48をソフトウェア処理によって実現してもよい。たとえば、変換部36の出力データから直流成分(平均値)を差引くことによって逆のこぎり波状波形の交流成分を算出し、その算出された交流成分のデータの二乗平均平方根を算出することによって、逆のこぎり波状波形の交流成分の実効値をソフトウェア上で算出することができる。
【0073】
なお、変換部36については、実施の形態1およびその変形例のようにアナログ電子回路によって構成してもよいし、実施の形態2のようにソフトウェア処理によって構成してもよい。
【0074】
この実施の形態3によっても、実施の形態1と同様に、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0075】
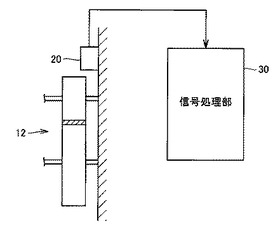
なお、上記の各実施の形態においては、転がり軸受10の異常を診断する異常診断装置について説明したが、この発明は、異常が発生することによりパルス状の振動が周期的に発生する機器全般に適用可能である。たとえば、図15に示すように歯車12が据付けられる土台や、歯車を格納するギヤボックス(図示せず)などに振動センサ20を設置することによって、歯車12の歯欠け等の異常を診断することも可能である。
【0076】
また、上記の各実施の形態においては、振動センサ20は加速度センサによって構成されるものとしたが、加速度センサに代えて速度センサや変位センサを用いてもよい。また、振動センサ20に代えて、振動音を検出するためのマイクロホンや、回転軸のトルク変動を検出するトルクセンサ等を用いてもよい。
【0077】
なお、上記において、振動センサ20は、この発明における「センサ」の一実施例に対応し、信号処理部30,30A,30Bは、この発明における「処理部」の一実施例に対応する。
【0078】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0079】
10 転がり軸受、12 歯車、20 振動センサ、30,30A,30B 信号処理部、32 増幅器、34 帯域フィルタ、36,36A 変換部、38 整流部、40 包絡線検波部、42 周波数分析部、44 診断部、46 A/D変換器、48 実効値算出部、50 コンデンサ、52 抵抗器。
【技術分野】
【0001】
この発明は、転がり軸受の異常診断装置および歯車の異常診断装置に関し、特に、転がり軸受や歯車の回転時に発生する振動や音を測定することによって、転がり軸受のキズや剥離等の異常や歯車の歯欠け等の異常を診断する技術に関する。
【背景技術】
【0002】
転がり軸受に生じたキズや剥離等の異常を診断する手法として、転がり軸受の回転時に発生する振動や音を振動センサやマイクロホンによって測定し、その測定された信号のエンベロープ波形(包絡線)を生成し、それを周波数分析して得られる周波数スペクトルのピークレベルを評価する手法が知られている(たとえば特許文献1や特許文献2参照。)。
【0003】
なお、エンベロープ波形を生成する手法については、絶対値検波後にローパスフィルタ(LPF)を適用することによってエンベロープ波形を生成する手法が周知であり、市販の計測機器にも広く搭載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−146762号公報
【特許文献2】特開2001−21453号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
転がり軸受に生じたキズや剥離等により、転がり軸受の回転時にパルス状の振動が周期的に発生する。このキズや剥離等により生じるパルス状波形の幅(パルス幅)は数ミリ秒〜数十ミリ秒と狭い場合が多く、その信号パワーは非常に小さい。そのため、特にキズや剥離の程度が小さい場合には、エンベロープ波形を周波数分析して得られる周波数スペクトルのピークレベルが低く、十分なS/N比を得られない場合がある。
【0006】
また、キズや剥離等の欠陥により生じるパルス状波形のパルス幅は、欠陥の形状によって変化し得る。ここで、周波数スペクトルのピークレベルは、パルス状波形の振幅とパルス幅とにほぼ比例し、パルス幅が変化すると周波数スペクトルのピークレベルが変化する。したがって、欠陥の形状の違いによって周波数スペクトルのピークレベルがばらつき、その結果、異常診断を誤判定する可能性がある。
【0007】
なお、このような問題は、異常が発生することによりパルス状の振動が周期的に発生する機器全般に適用可能であり、たとえば、歯車において歯欠け等の欠陥が生じたときも同様の問題が発生し得る。
【0008】
そこで、この発明は、かかる問題を解決するためになされたものであり、その目的は、キズや剥離等の転がり軸受の異常を感度良くかつ正確に診断可能な転がり軸受の異常診断装置を提供することである。
【0009】
また、この発明の別の目的は、歯車の歯欠け等の異常を感度良くかつ正確に診断可能な歯車の異常診断装置を提供することである。
【課題を解決するための手段】
【0010】
この発明によれば、転がり軸受の異常診断装置は、転がり軸受の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて転がり軸受の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形を、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。診断部は、逆のこぎり波状波形に基づいて転がり軸受の異常を診断する。
【0011】
好ましくは、変換部は、振動波形を整流する整流部と、所定の時定数を有する包絡線検波部とを含む。包絡線検波部は、整流部の出力を受ける。時定数は、包絡線検波部の出力波形にダイアゴナルクリッピング歪み(「袈裟切り歪み」とも称される。)が生じるように設定される。逆のこぎり波状波形は、包絡線検波部の出力波形においてダイアゴナルクリッピング歪みが生じたものである。
【0012】
さらに好ましくは、時定数は、パルス状波形の発生周期の0.1〜2.0倍に設定される。
【0013】
好ましくは、整流部および包絡線検波部は、整流部に対応する整流回路と、包絡線検波部を形成する抵抗器およびコンデンサとを含むアナログ電子回路によって構成される。
【0014】
さらに好ましくは、抵抗器は、抵抗値を変更可能な可変抵抗器である。そして、可変抵抗器の抵抗値を調整することによって時定数が設定される。
【0015】
さらに好ましくは、可変抵抗器の抵抗値は、転がり軸受の仕様および回転速度に基づいて調整される。
【0016】
また、好ましくは、処理部は、A/D変換器をさらに含む。A/D変換器は、センサからのアナログ信号をデジタル信号に変換して変換部へ出力する。整流部および包絡線検波部は、予め準備されたプログラムに従って動作するソフトウェア処理によって構成される。
【0017】
さらに好ましくは、包絡線検波部は、時定数を設定するための調整パラメータを有する。
【0018】
さらに好ましくは、調整パラメータは、転がり軸受の仕様および回転速度に基づいて自動調整される。
【0019】
好ましくは、整流部は、全波整流回路を含む。
また、好ましくは、整流部は、半波整流回路を含む。
【0020】
好ましくは、処理部は、周波数分析部をさらに含む。周波数分析部は、逆のこぎり波状波形の周波数スペクトルを出力する。診断部は、周波数スペクトルのピークレベルに基づいて転がり軸受の異常を診断する。
【0021】
また、好ましくは、処理部は、実効値演算部をさらに含む。実効値演算部は、逆のこぎり波状波形の交流成分の実効値を出力する。診断部は、逆のこぎり波状波形の交流成分の実効値に基づいて転がり軸受の異常を診断する。
【0022】
好ましくは、センサは、加速度センサ、速度センサおよび変位センサのいずれかを含む。
【0023】
また、好ましくは、センサは、転がり軸受の振動音を検出するマイクロホンを含む。
また、好ましくは、センサは、転がり軸受のトルクを検出するためのトルクセンサを含む。
【0024】
また、この発明によれば、歯車の異常診断装置は、歯車の振動を測定するためのセンサと、センサを用いて測定された振動波形に基づいて歯車の異常を診断するための処理部とを備える。処理部は、変換部と、診断部とを含む。変換部は、転がり軸受の異常により振動波形に周期的に表われるパルス状波形を、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。診断部は、逆のこぎり波状波形に基づいて歯車の異常を診断する。
【発明の効果】
【0025】
この発明においては、転がり軸受や歯車の異常により振動波形に周期的に表われるパルス状波形が、各パルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換される。このような逆のこぎり波状波形は、ダイアゴナルクリッピング歪みとして従来は避けるべきものとされていたが、この発明においては、この歪みが積極的に活用される。
【0026】
すなわち、変換部による変換後の逆のこぎり波状波形の信号幅はエンベロープ波形よりも広いので、信号パワーが大きい。これにより、周波数分析して得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0027】
また、逆のこぎり波状波形の信号幅は一定であるので、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けず、パルス状波形の振幅(パルス高さ)のみの影響を受けることとなる。すなわち、周波数スペクトルのピークレベルは、欠陥の形状の影響は受けず、欠陥の大きさのみの影響を受けることとなる。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0028】
したがって、この発明によれば、キズや剥離等の転がり軸受の異常や歯欠け等の歯車の異常を感度良くかつ正確に診断することができる。
【図面の簡単な説明】
【0029】
【図1】この発明の実施の形態1による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
【図2】図1に示す変換部の回路図である。
【図3】パルス状波形の発生周期に対する時定数の比と、逆のこぎり波状波形の交流成分の実効値との関係を示した図である。
【図4】変換部から出力される逆のこぎり波状波形を示した図である。
【図5】従来のエンベロープ波形を示した図である。
【図6】図4に示す逆のこぎり波状波形の周波数スペクトルを示した図である。
【図7】図5に示すエンベロープ波形の周波数スペクトルを示した図である。
【図8】パルス幅が異なるパルス状波形に対しての、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化を示した図である。
【図9】パルス幅が異なるパルス状波形に対しての、従来のエンベロープ波形の周波数スペクトルにおけるピークレベルの変化を示した図である。
【図10】実施の形態1の変形例における変換部の回路図である。
【図11】実施の形態2による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
【図12】図11に示す包絡線検波部においてソフトウェアにより実行される処理手順を説明するためのフローチャートである。
【図13】実施の形態3による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。
【図14】図13に示す実効値算出部の回路図である。
【図15】歯車の異常診断装置の構成を示すブロック図である。
【発明を実施するための形態】
【0030】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0031】
[実施の形態1]
図1は、この発明の実施の形態1による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図1を参照して、異常診断装置は、振動センサ20と、信号処理部30とを備える。
【0032】
振動センサ20は、転がり軸受10に固設される。そして、振動センサ20は、転がり軸受10の振動を検出し、検出信号を信号処理部30へ出力する。振動センサ20は、たとえば、圧電素子を用いた加速度センサによって構成される。転がり軸受10は、図示されない回転部材の回転軸を回転自在に支持する。転がり軸受10は、たとえば、自動調芯ころ軸受や円すいころ軸受、円筒ころ軸受、玉軸受等によって構成される。なお、転がり軸受10は、単列のものでも複列のものでもよい。
【0033】
信号処理部30は、増幅器32と、帯域フィルタ34と、変換部36と、周波数分析部42と、診断部44とを含む。増幅器32は、振動センサ20から出力される検出信号を受け、その受けた検出信号を所定のゲインで増幅する。帯域フィルタ34は、増幅器32の出力を受け、予め定められた周波数帯域のみの信号を取り出して変換部36へ出力する。
【0034】
変換部36は、帯域フィルタ34から出力される振動波形に周期的に表われるパルス状波形を、そのパルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。より詳しくは、変換部36は、整流部38と、包絡線検波部40とを含む。整流部38は、帯域フィルタ34から出力される振動波形を絶対値に整流する。包絡線検波部40は、整流部38の出力を受け、所定の時定数を有する。
【0035】
ここで、包絡線検波部40の時定数は、包絡線検波部40の出力波形にダイアゴナルクリッピング歪みが生じるように設定される。ダイアゴナルクリッピング歪みとは、出力波形の立下がりの傾斜が本来の包絡線の傾斜よりも緩やかになる歪みであり、一般的には、ダイアゴナルクリッピング歪みは避けるべきものとされているが、この実施の形態1においては、このダイアゴナルクリッピング歪みが積極的に活用される。そして、包絡線検波部40は、パルス状波形の包絡線に対してダイアゴナルクリッピング歪みを生じさせた、逆のこぎり波状の波形を出力する。
【0036】
ダイアゴナルクリッピング歪みを積極的に生じるように包絡線検波部40の時定数を設定するのは、周波数分析部42に与えられる信号のパワーを増加させ、かつ、信号幅を一定にするためである。すなわち、ダイアゴナルクリッピング歪みにより、パルス状波形に対応する出力波形の信号幅が拡大され、信号パワーが増加する。これにより、周波数分析部42により得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0037】
また、ダイアゴナルクリッピング歪みにより、パルス状波形に対応する出力波形の信号幅は、時定数によって定まる一定幅となる。したがって、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けなくなり、すなわち、欠陥の形状の影響を受けなくなる。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0038】
周波数分析部42は、変換部36から出力される逆のこぎり波状波形の周波数スペクトルを算出し、その算出結果を診断部44へ出力する。一例として、周波数分析部42は、変換部36から受ける逆のこぎり波状波形に対して高速フーリエ変換(FFT)処理を行なうことによって、逆のこぎり波状波形の周波数スペクトルを算出する。
【0039】
診断部44は、周波数分析部42から受ける逆のこぎり波状波形の周波数スペクトルに基づいて転がり軸受10の異常を診断する。具体的には、転がり軸受10の内部においてキズや剥離等の損傷が発生すると、損傷部位(内輪、外輪、転動体)に応じて、軸受内部の幾何学的構造および回転速度から理論的に決定される特定の周波数に振動のピークが発生する。そこで、診断部44は、周波数スペクトルのピーク周波数およびピークレベルに基づいて、異常発生部位を診断することができる。
【0040】
図2は、図1に示した変換部36の回路図である。図2を参照して、上述のように、変換部36は、整流部38と、包絡線検波部40とを含む。整流部38は、複数のオペアンプ、ダイオードおよび抵抗素子を含む全波整流回路である。包絡線検波部40は、整流部38の出力側に設けられ、コンデンサ50と、抵抗器52とを含む。
【0041】
コンデンサ50および抵抗器52は、整流部38の出力線と接地ノードとの間に並列に接続される。このコンデンサ50の容量値および抵抗器52の抵抗値によって包絡線検波部40の時定数が決まる。そして、包絡線検波部40の出力波形にダイアゴナルクリッピング歪みを生じるような時定数が設定されるように、コンデンサ50の容量値および抵抗器52の抵抗値が設定される。
【0042】
ここで、転がり軸受10の仕様や回転速度によってパルス状波形の発生周期は変化するので、パルス状波形の発生周期の変化に応じて時定数を変更する必要がある。そこで、この実施の形態1では、抵抗器52は、可変抵抗器によって構成され、転がり軸受10の仕様や回転速度に応じて抵抗器52の抵抗値が調整される。一例として、軸受の仕様や回転速度と時定数と抵抗器52の抵抗値との関係を予め定めておき、時定数が所望の値になるように、転がり軸受10の仕様や回転速度に基づいて抵抗器52の抵抗値を自動調整するようにしてもよい。
【0043】
なお、抵抗器52を可変抵抗器とすることに代えて、または抵抗器52を可変抵抗器によって構成するとともに、コンデンサ50を可変コンデンサによって構成し、転がり軸受10の仕様や回転速度に応じてコンデンサ50の容量値を調整してもよい。
【0044】
図3は、パルス状波形の発生周期に対する時定数の比と、逆のこぎり波状波形の交流成分の実効値との関係を示した図である。図3を参照して、包絡線検波部40の時定数を変化させると、逆のこぎり波状波形の交流成分の実効値にピークが発生する。そして、逆のこぎり波状波形の交流成分の実効値が大きいほど、周波数分析部42により得られる周波数スペクトルのピークレベルは高くなる。
【0045】
図3に示されるように、時定数は、パルス状波形の発生周期に近い値が望ましい。パルス状波形の発生周期に対して時定数が小さすぎると、逆のこぎり波状波形を生成できず(包絡線に近づく)、時定数が大きすぎると、パルス状波形のピーク値がホールドされたような波形となる(変動が小さくなる)。そこで、たとえば、包絡線検波部40の時定数は、パルス状波形の発生周期の0.1〜2.0倍の範囲に設定するのが好ましい。
【0046】
図4は、変換部36から出力される逆のこぎり波状波形を示した図である。図4を参照して、実線k1は、変換部36による変換前のパルス状波形を示し、点線k2は、変換部36によって得られる逆のこぎり波状波形を示す。なお、実線k1におけるパルス状波形間の小刻みな振動はノイズであり、ここでいうパルス状波形に該当するものではない。
【0047】
また、比較例として、従来のエンベロープ波形を図5に示す。図5を参照して、点線k3が、実線k1にエンベロープ処理を行なうことによって得られるエンベロープ波形(包絡線)を示す。
【0048】
図4,5を参照して、逆のこぎり波状波形(点線k2)の信号幅は、エンベロープ波形(点線k3)の信号幅よりも広い。また、特に図示されないが、欠陥の形状が図の状況時と異なることにより実線k1におけるパルス状波形のパルス幅が変化しても、逆のこぎり波状波形(点線k2)の信号幅は一定となる(一方、エンベロープ波形(点線k3)の信号幅は変化する。)。
【0049】
図6は、図4に示した逆のこぎり波状波形の周波数スペクトルを示した図である。なお、比較例として、図5に示したエンベロープ波形の周波数スペクトルを図7に示す。
【0050】
図6,7を参照して、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの方が、エンベロープ波形の周波数スペクトルにおけるピークレベルよりも高い。これは、図4,5に示したように、逆のこぎり波状波形の信号幅はエンベロープ波形の信号幅よりも広く、逆のこぎり波状波形の信号パワーの方がエンベロープ波形の信号パワーよりも大きいからである。これにより、逆のこぎり波状波形を用いることによって、従来のエンベロープ波形を用いるよりもS/N比が向上する。
【0051】
図8は、パルス幅が異なるパルス状波形に対しての、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化を示した図である。なお、比較例として、従来のエンベロープ波形における周波数スペクトルのピークレベルの変化を図9に示す。
【0052】
図8,9を参照して、パルス幅が異なるパルス状波形に対して、逆のこぎり波状波形の周波数スペクトルにおけるピークレベルの変化は小さい。一方、エンベロープ波形の場合には、パルス幅が異なるパルス状波形に対して、周波数スペクトルのピークレベルの変化が大きい。これは、逆のこぎり波状波形の信号幅は、パルス幅が変化しても一定であり、一方、パルス幅の変化に応じてエンベロープ波形の信号幅は変化するからである。
【0053】
以上のように、この実施の形態1においては、転がり軸受10の異常により周期的に発生するパルス状波形が変換部36によって逆のこぎり波状波形に変換される。逆のこぎり波状波形の信号幅はエンベロープ波形よりも広く、信号パワーが大きい。これにより、周波数分析して得られる周波数スペクトルのピークレベルが高くなり、S/N比が向上する。
【0054】
また、逆のこぎり波状波形の信号幅は一定であるので、周波数スペクトルのピークレベルは、パルス状波形のパルス幅の影響を受けず、パルス状波形の振幅(パルス高さ)のみの影響を受ける。すなわち、周波数スペクトルのピークレベルは、欠陥の形状の影響は受けず、欠陥の大きさのみの影響を受ける。これにより、欠陥の形状の違いによる周波数スペクトルのピークレベルのばらつきが低減される。
【0055】
したがって、この実施の形態1によれば、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0056】
[実施の形態1の変形例]
上記の実施の形態1においては、変換部36の整流部38は、全波整流回路によって構成されるものとしたが、全波整流回路に代えて半波整流回路で整流部38を構成してもよい。
【0057】
図10は、実施の形態1の変形例における変換部36の回路図である。図10を参照して、変換部36の整流部38は、半波整流用ダイオードを含む。なお、包絡線検波部40の構成は、図2に示した実施の形態1と同じである。
【0058】
この実施の形態1の変形例によれば、変換部36を小型化することができ、信号処理部も安価に実現することができる。
【0059】
[実施の形態2]
実施の形態1およびその変形例では、変換部36は、図2に示したアナログ電子回路によって構成されるものとしたが、この実施の形態2では、ソフトウェア処理によって実現される。
【0060】
図11は、実施の形態2による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図11を参照して、この異常診断装置は、振動センサ20と、信号処理部30Aとを備える。信号処理部30Aは、図1に示した実施の形態1における信号処理部30の構成において、A/D変換器46をさらに含み、変換部36に代えて変換部36Aを含む。
【0061】
A/D変換器46は、帯域フィルタ34を通過したアナログ信号を所定のサンプリング周波数でサンプリングし、デジタル信号に変換する。変換部36Aは、振動波形に周期的に表われるパルス状波形であってA/D変換器46によりデジタル信号に変換されたものを、そのパルス状波形の包絡線(エンベロープ波形)よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する。この変換部36Aも、整流部38と、包絡線検波部40とを含む。整流部38および包絡線検波部40の各々の機能は、実施の形態1で説明した通りである。
【0062】
図12は、図11に示した包絡線検波部40においてソフトウェアにより実行される処理手順を説明するためのフローチャートである。なお、このフローチャートに示される処理は、予め定められた演算周期毎に実行される。
【0063】
図12を参照して、包絡線検波部40は、整流部38から受ける入力信号X[i](iは信号が離散化されていることを示し、[i]は今回値を示し、[i−1]は前回演算時の値を示す。)が、前回演算時の出力信号Y[i−1]に係数αを乗じた値以上であるか否かを判定する(ステップS10)。なお、係数αは、包絡線検波部40の時定数を決定するための値であり、Y[i−1]×αは、係数αに応じた時定数で減衰する信号を示す。
【0064】
ステップS10において、入力信号X[i]が出力信号Y[i−1]×α以上であると判定されると(ステップS10においてYES)、包絡線検波部40は、入力信号X[i]を出力信号Y[i]に代入する(ステップS20)。一方、ステップS10において、入力信号X[i]が出力信号Y[i−1]×αよりも小さいと判定されると(ステップS10においてNO)、包絡線検波部40は、Y[i−1]×αの値を出力信号Y[i]に代入する(ステップS30)。すなわち、包絡線検波部40は、係数αに応じた時定数で減衰する信号Y[i−1]×αを入力信号X[i]と比較し、値が大きい方を出力信号Y[i]とする。
【0065】
その後、包絡線検波部40は、出力信号Y[i]をY[i−1]に代入する(ステップS40)。なお、Y[i−1]は、次回の演算時に用いられる。
【0066】
なお、係数αは、次式に基づいて算出することができる。
α=(1/e)1/(τ×fs) …(1)
ここで、eは自然対数の底であり、τは時定数を示し、fsはA/D変換器46のサンプリング周波数を示す。たとえば、転がり軸受10の仕様および回転速度に基づいてパルス状波形の発生周期を推定できるので、包絡線検波部40の時定数がパルス状波形の発生周期の0.1〜2.0倍となるように転がり軸受10の仕様および回転速度に基づいて時定数τを調整し、上記(1)式に基づいて係数αを調整することができる。
【0067】
この実施の形態2によっても、実施の形態1と同様に、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0068】
[実施の形態3]
上記の各実施の形態においては、変換部36により生成される逆のこぎり波状波形を周波数分析することによって転がり軸受10の異常診断を行なうものとした。この実施の形態3では、周波数分析に代えて逆のこぎり波状波形の交流成分の実効値(「RMS(Root Mean Square)値」とも称される。)が算出され、その算出結果に基づいて転がり軸受10の異常診断が行なわれる。
【0069】
図13は、実施の形態3による転がり軸受の異常診断装置の構成を機能的に示すブロック図である。図13を参照して、この異常診断装置は、振動センサ20と、信号処理部30Bとを備える。信号処理部30Bは、図1に示した実施の形態1における信号処理部30の構成において、周波数分析部42に代えて実効値算出部48を含む。
【0070】
実効値算出部48は、変換部36によって生成される逆のこぎり波状波形の交流成分の実効値を算出する。そして、診断部44は、実効値算出部48から受ける逆のこぎり波状波形の交流成分の実効値に基づいて転がり軸受10の異常を診断する。
【0071】
図14は、図13に示した実効値算出部48の回路図である。図14を参照して、この回路は、入力信号を絶対値に整流する整流部と、整流部の出力側に設けられる低域通過フィルタ(LPF)とから成る。
【0072】
なお、特に図示しないが、実効値算出部48には、市販の実効値変換用ICを用いてもよい。また、実効値算出部48をソフトウェア処理によって実現してもよい。たとえば、変換部36の出力データから直流成分(平均値)を差引くことによって逆のこぎり波状波形の交流成分を算出し、その算出された交流成分のデータの二乗平均平方根を算出することによって、逆のこぎり波状波形の交流成分の実効値をソフトウェア上で算出することができる。
【0073】
なお、変換部36については、実施の形態1およびその変形例のようにアナログ電子回路によって構成してもよいし、実施の形態2のようにソフトウェア処理によって構成してもよい。
【0074】
この実施の形態3によっても、実施の形態1と同様に、キズや剥離等の転がり軸受10の異常を感度良くかつ正確に診断することができる。
【0075】
なお、上記の各実施の形態においては、転がり軸受10の異常を診断する異常診断装置について説明したが、この発明は、異常が発生することによりパルス状の振動が周期的に発生する機器全般に適用可能である。たとえば、図15に示すように歯車12が据付けられる土台や、歯車を格納するギヤボックス(図示せず)などに振動センサ20を設置することによって、歯車12の歯欠け等の異常を診断することも可能である。
【0076】
また、上記の各実施の形態においては、振動センサ20は加速度センサによって構成されるものとしたが、加速度センサに代えて速度センサや変位センサを用いてもよい。また、振動センサ20に代えて、振動音を検出するためのマイクロホンや、回転軸のトルク変動を検出するトルクセンサ等を用いてもよい。
【0077】
なお、上記において、振動センサ20は、この発明における「センサ」の一実施例に対応し、信号処理部30,30A,30Bは、この発明における「処理部」の一実施例に対応する。
【0078】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0079】
10 転がり軸受、12 歯車、20 振動センサ、30,30A,30B 信号処理部、32 増幅器、34 帯域フィルタ、36,36A 変換部、38 整流部、40 包絡線検波部、42 周波数分析部、44 診断部、46 A/D変換器、48 実効値算出部、50 コンデンサ、52 抵抗器。
【特許請求の範囲】
【請求項1】
転がり軸受の振動を測定するためのセンサと、
前記センサを用いて測定された振動波形に基づいて前記転がり軸受の異常を診断するための処理部とを備え、
前記処理部は、
前記転がり軸受の異常により前記振動波形に周期的に表われるパルス状波形を、前記パルス状波形の各々の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する変換部と、
前記逆のこぎり波状波形に基づいて前記転がり軸受の異常を診断する診断部とを含む、転がり軸受の異常診断装置。
【請求項2】
前記変換部は、
前記振動波形を整流する整流部と、
前記整流部の出力を受け、所定の時定数を有する包絡線検波部とを含み、
前記時定数は、前記包絡線検波部の出力波形にダイアゴナルクリッピング歪みが生じるように設定され、
前記逆のこぎり波状波形は、前記包絡線検波部の出力波形においてダイアゴナルクリッピング歪みが生じたものである、請求項1に記載の転がり軸受の異常診断装置。
【請求項3】
前記時定数は、前記パルス状波形の発生周期の0.1〜2.0倍に設定される、請求項2に記載の転がり軸受の異常診断装置。
【請求項4】
前記整流部および前記包絡線検波部は、前記整流部に対応する整流回路と、前記包絡線検波部を形成する抵抗器およびコンデンサとを含むアナログ電子回路によって構成される、請求項2または請求項3に記載の転がり軸受の異常診断装置。
【請求項5】
前記抵抗器は、抵抗値を変更可能な可変抵抗器であり、
前記可変抵抗器の抵抗値を調整することによって前記時定数が設定される、請求項4に記載の転がり軸受の異常診断装置。
【請求項6】
前記可変抵抗器の抵抗値は、前記転がり軸受の仕様および回転速度に基づいて調整される、請求項5に記載の転がり軸受の異常診断装置。
【請求項7】
前記処理部は、前記センサからのアナログ信号をデジタル信号に変換して前記変換部へ出力するA/D変換器をさらに含み、
前記整流部および前記包絡線検波部は、予め準備されたプログラムに従って動作するソフトウェア処理によって構成される、請求項2または請求項3に記載の転がり軸受の異常診断装置。
【請求項8】
前記包絡線検波部は、前記時定数を設定するための調整パラメータを有する、請求項7に記載の転がり軸受の異常診断装置。
【請求項9】
前記調整パラメータは、前記転がり軸受の仕様および回転速度に基づいて調整される、請求項8に記載の転がり軸受の異常診断装置。
【請求項10】
前記整流部は、全波整流回路を含む、請求項2から請求項9のいずれかに記載の転がり軸受の異常診断装置。
【請求項11】
前記整流部は、半波整流回路を含む、請求項2から請求項9のいずれかに記載の転がり軸受の異常診断装置。
【請求項12】
前記処理部は、前記逆のこぎり波状波形の周波数スペクトルを出力する周波数分析部をさらに含み、
前記診断部は、前記周波数スペクトルのピークレベルに基づいて前記転がり軸受の異常を診断する、請求項1から請求項11のいずれかに記載の転がり軸受の異常診断装置。
【請求項13】
前記処理部は、前記逆のこぎり波状波形の交流成分の実効値を算出する実効値算出部をさらに含み、
前記診断部は、前記逆のこぎり波状波形の交流成分の実効値に基づいて前記転がり軸受の異常を診断する、請求項1から請求項11のいずれかに記載の転がり軸受の異常診断装置。
【請求項14】
前記センサは、加速度センサ、速度センサおよび変位センサのいずれかを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項15】
前記センサは、前記転がり軸受の振動音を検出するマイクロホンを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項16】
前記センサは、前記転がり軸受のトルクを検出するためのトルクセンサを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項17】
歯車の振動を測定するためのセンサと、
前記センサを用いて測定された振動波形に基づいて前記歯車の異常を診断するための処理部とを備え、
前記処理部は、
前記歯車の異常により前記振動波形に周期的に表われるパルス状波形を、前記パルス状波形の各々の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する変換部と、
前記逆のこぎり波状波形に基づいて前記歯車の異常を診断する診断部とを含む、歯車の異常診断装置。
【請求項1】
転がり軸受の振動を測定するためのセンサと、
前記センサを用いて測定された振動波形に基づいて前記転がり軸受の異常を診断するための処理部とを備え、
前記処理部は、
前記転がり軸受の異常により前記振動波形に周期的に表われるパルス状波形を、前記パルス状波形の各々の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する変換部と、
前記逆のこぎり波状波形に基づいて前記転がり軸受の異常を診断する診断部とを含む、転がり軸受の異常診断装置。
【請求項2】
前記変換部は、
前記振動波形を整流する整流部と、
前記整流部の出力を受け、所定の時定数を有する包絡線検波部とを含み、
前記時定数は、前記包絡線検波部の出力波形にダイアゴナルクリッピング歪みが生じるように設定され、
前記逆のこぎり波状波形は、前記包絡線検波部の出力波形においてダイアゴナルクリッピング歪みが生じたものである、請求項1に記載の転がり軸受の異常診断装置。
【請求項3】
前記時定数は、前記パルス状波形の発生周期の0.1〜2.0倍に設定される、請求項2に記載の転がり軸受の異常診断装置。
【請求項4】
前記整流部および前記包絡線検波部は、前記整流部に対応する整流回路と、前記包絡線検波部を形成する抵抗器およびコンデンサとを含むアナログ電子回路によって構成される、請求項2または請求項3に記載の転がり軸受の異常診断装置。
【請求項5】
前記抵抗器は、抵抗値を変更可能な可変抵抗器であり、
前記可変抵抗器の抵抗値を調整することによって前記時定数が設定される、請求項4に記載の転がり軸受の異常診断装置。
【請求項6】
前記可変抵抗器の抵抗値は、前記転がり軸受の仕様および回転速度に基づいて調整される、請求項5に記載の転がり軸受の異常診断装置。
【請求項7】
前記処理部は、前記センサからのアナログ信号をデジタル信号に変換して前記変換部へ出力するA/D変換器をさらに含み、
前記整流部および前記包絡線検波部は、予め準備されたプログラムに従って動作するソフトウェア処理によって構成される、請求項2または請求項3に記載の転がり軸受の異常診断装置。
【請求項8】
前記包絡線検波部は、前記時定数を設定するための調整パラメータを有する、請求項7に記載の転がり軸受の異常診断装置。
【請求項9】
前記調整パラメータは、前記転がり軸受の仕様および回転速度に基づいて調整される、請求項8に記載の転がり軸受の異常診断装置。
【請求項10】
前記整流部は、全波整流回路を含む、請求項2から請求項9のいずれかに記載の転がり軸受の異常診断装置。
【請求項11】
前記整流部は、半波整流回路を含む、請求項2から請求項9のいずれかに記載の転がり軸受の異常診断装置。
【請求項12】
前記処理部は、前記逆のこぎり波状波形の周波数スペクトルを出力する周波数分析部をさらに含み、
前記診断部は、前記周波数スペクトルのピークレベルに基づいて前記転がり軸受の異常を診断する、請求項1から請求項11のいずれかに記載の転がり軸受の異常診断装置。
【請求項13】
前記処理部は、前記逆のこぎり波状波形の交流成分の実効値を算出する実効値算出部をさらに含み、
前記診断部は、前記逆のこぎり波状波形の交流成分の実効値に基づいて前記転がり軸受の異常を診断する、請求項1から請求項11のいずれかに記載の転がり軸受の異常診断装置。
【請求項14】
前記センサは、加速度センサ、速度センサおよび変位センサのいずれかを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項15】
前記センサは、前記転がり軸受の振動音を検出するマイクロホンを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項16】
前記センサは、前記転がり軸受のトルクを検出するためのトルクセンサを含む、請求項1から請求項13のいずれかに記載の転がり軸受の異常診断装置。
【請求項17】
歯車の振動を測定するためのセンサと、
前記センサを用いて測定された振動波形に基づいて前記歯車の異常を診断するための処理部とを備え、
前記処理部は、
前記歯車の異常により前記振動波形に周期的に表われるパルス状波形を、前記パルス状波形の各々の包絡線よりも信号幅が広くかつ一定の逆のこぎり波状波形に変換する変換部と、
前記逆のこぎり波状波形に基づいて前記歯車の異常を診断する診断部とを含む、歯車の異常診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−42338(P2012−42338A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−183763(P2010−183763)
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]