
転てつ機
【課題】鎖錠桿を用いずに或いは鎖錠桿に依拠せずに基本レールとトングレールが適正に接着しているか否かの検知が行える、転てつ機を提供する。
【解決手段】転てつ機1は、動作桿11、13と、少なくとも定位又は反位の近傍区間にトングレール開口側の動作桿にのみ駆動力を付与する駆動手段15と、少なくとも近傍区間に、トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達するコイルばね(弾性手段)17と、トングレール接着側の動作桿が定位又は反位に対応する終端位置に到達しているときに鎖錠を行う鎖錠手段21とを備えている。一対の動作桿における転換ローラ39と係合するカム面71、73には、相対的に切り欠き量の小さい係合確保面75、79と切り欠き量の大きい係合回避面77、81とが所定の位置関係で設けられている。
【解決手段】転てつ機1は、動作桿11、13と、少なくとも定位又は反位の近傍区間にトングレール開口側の動作桿にのみ駆動力を付与する駆動手段15と、少なくとも近傍区間に、トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達するコイルばね(弾性手段)17と、トングレール接着側の動作桿が定位又は反位に対応する終端位置に到達しているときに鎖錠を行う鎖錠手段21とを備えている。一対の動作桿における転換ローラ39と係合するカム面71、73には、相対的に切り欠き量の小さい係合確保面75、79と切り欠き量の大きい係合回避面77、81とが所定の位置関係で設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基本レールに対しトングレールの転換を行う転てつ機に関するものである。
【背景技術】
【0002】
従来より、鉄道分野において、割出電気転てつ機が存在している(特許文献1参照)。割出電気転てつ機は、一対のトングレールを定位及び反位の間で転換させる転換機能、転換終了時にトングレールの状態を維持する鎖錠機能、さらに非開通進路を背向側から進行してきた車両の軌道を確保するための背向割出機能などが実現されている。
【0003】
具体的には、割出電気転てつ機は、トングレールを移動させるための動作桿や、動作桿を駆動するための転換ローラなどを用いて、転換機能を実現しており、また、トングレールの先端部の位置を検出する鎖錠桿や、鎖錠桿を鎖錠するロックピースなどを用いて、鎖錠機能を実現していた。さらに、背向割出機能を実現するため、上述した動作桿や鎖錠桿はトングレール毎に個別に移動できるよう2本ずつ設けられていた。
【0004】
転換動作は、円弧状に移動する転換ローラと、動作桿のそれぞれに切り欠き形成されたカム面との係合により、動作桿が移動することで行われていた。カム面の入口は逃げ幅の大きい切り欠き面と逃げ幅の小さい切り欠き面とを有していた。そして、接着側となるトングレールの動作桿において転換ローラから接着方向の駆動力を受ける部位に、逃げ幅の小さい切り欠き面が形成されており、開口側となるトングレールの動作桿において転換ローラから開口方向の駆動力を受ける部位に、逃げ幅の大きい切り欠き面が形成されていた。これにより、転換完了状態に近い状態においては、転換ローラが接着側トングレールの動作桿と十分に当接し、接着側トングレールに接着完了まで確実に接着力を伝達できるようになっていた。
【0005】
また、転換動作時には、接着側トングレールの動作桿は本来の転換完了位置に移動しておりながら、接着側トングレール自体は異物などの介在によって基本レールに適正に接着していないことも起こりえる。この場合にも、接着側トングレールの鎖錠桿が接着側トングレールの先端部の非接触状態を検出し、ロックピースが本来の施錠位置まで到達していないことをもって、転換動作が適正に完了していないことを検知することができた。
【特許文献1】特開平7−96836号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来の割出電気転てつ機においては、動作桿及び鎖錠桿が各2本ずつ、すなわち長尺部材が4本設けられていたため、導入時及び保守時の調整作業が煩雑で、簡易化が望まれていた。
【0007】
また、転換動作の完了検知や鎖錠は鎖錠桿を用いて行われていたが、鎖錠桿のような長尺部材の動作に依存せずに、転換動作の完了検知や鎖錠が実施できれば、より好ましい。
【0008】
現在、特に車両の入換えや留置などを目的とした側線の用途においては、鎖錠桿を用いずに転換動作の完了検知や鎖錠が確実に行えることが要望されている。
【0009】
本発明は、上述した事情に鑑みてなされたものであり、鎖錠桿を用いずに或いは鎖錠桿に依拠せずにトングレールが適正に鎖錠されているか否かの検知が行える転てつ機を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明に係る転てつ機は、定位及び反位の間で転換動作可能な一対のトングレールを動作させる一対の動作桿と、前記一対の動作桿を駆動する駆動手段であって、少なくとも前記定位又は反位の近傍区間においては該一対の動作桿のうちトングレール開口側の動作桿にのみ駆動力を付与する駆動手段と、少なくとも前記近傍区間において、前記トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達する弾性手段と、前記トングレール接着側の動作桿が前記定位又は反位に対応する終端位置に到達しているときに、該トングレール接着側の動作桿を鎖錠する鎖錠手段と、前記鎖錠手段における鎖錠動作完了又は非完了を検知する鎖錠動作検知手段とを備えたことを特徴とする。
【0011】
また、好適には、前記駆動手段は、円弧状に移動する転換ローラを備え、前記一対の動作桿はそれぞれ、前記転換ローラと係合するカム面を備え、前記カム面のそれぞれには、相対的に切り欠き量の小さい係合確保面と切り欠き量の大きい係合回避面とが含まれており、前記係合確保面及び係合回避面は、動作桿の動作方向に対向して形成されており、前記一対の動作桿は、トングレールの開口動作前方側に係合確保面を有し、トングレールの接着動作前方側に係合回避面を有している。
【0012】
さらに、好適には、本発明の転てつ機は、割出機能を備えており、前記弾性手段は、割出動作時、前記一対の動作桿のうち一方の動作桿のみが動作して前記鎖錠手段を解錠することを許容し、且つ、解錠後は、前記一方の動作桿の移動力を他方の動作桿に伝達する。
【発明の効果】
【0013】
本発明によれば、定位又は反位の近傍区間では、トングレール開口側の動作桿にのみ直接、駆動力を伝達し、トングレール接着側の動作桿には弾性部材を介してトングレール開口側の動作桿の移動力を伝達させているため、トングレール接着側の動作桿は、異物介在などが原因で移動が規制された場合には、そのまま停止することができ、定位又は反位に対応する終端位置まで移動してしまうことを防止することができる。したがって、従来のように鎖錠桿に依拠することなく、転換動作の完了や鎖錠を適正に検知することができる。さらに、鎖錠桿を省略することができ、保守調整の簡易化に寄与することができる。
【0014】
さらに、弾性手段が、一方の動作桿のみが動作して鎖錠手段を解錠することを許容し、且つ、解錠後は、一方の動作桿の移動力を他方の動作桿に伝達するように機能する場合には、上記のように鎖錠桿に依拠しない鎖錠検知を可能とすると共に、割出機能も確保することができる。
【0015】
なお、本発明の他の特徴及びそれによる作用効果は、添付図面を参照し、実施の形態によって更に詳しく説明する。
【発明を実施するための最良の形態】
【0016】
以下、この発明に係る転てつ機を、側線用の割出電気転てつ機として実施した場合の実施の形態を、添付図面に基づいて説明する。なお、図中、同一符号は同一又は対応部分を示すものとする。また、本発明は、側線用に限定して実施されるものではない。
【0017】
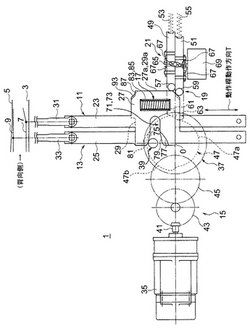
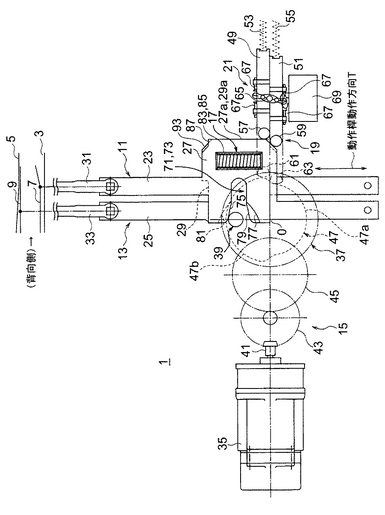
図1において、転てつ機1は、一対の基本レール3、5に対して定位及び反位の間でトングレール7、9を転換動作させる。転てつ機1は、主に、一対の動作桿11、13と、駆動手段15と、弾性手段としてのコイルばね17と、鎖錠手段19と、鎖錠動作検知手段21とを備える。
【0018】
一対の動作桿11、13は、基本レール3、5やトングレール7、9の間隔方向に延長する腕部23、25と、駆動手段15からの駆動力を受ける本体部27、29とを備える。本体部27、29は、腕部23、25の一端側に設けられており、腕部23、25の他端は、ロッド31、33を介して対応するトングレール7、9に接続している。
【0019】
駆動手段15は、モータ35と、転換ギヤ37と、転換ギヤ37に自転可能に設けられた転換ローラ39とを備えている。モータ35の出力軸には傘歯車41が取り付けられており、傘歯車41と転換ギヤ37との間には、第1中間ギヤ43及び第2中間ギヤ45がトルク伝達関係で配置されている。転換ローラ39は、その軸心が転換ギヤ37の回転中心Oから所定距離だけ径方向に離隔する位置にあるように、転換ギヤ37に取り付けられている。また、転換ギヤ37には、回転中心Oと同心的に回転するカム47が設けられている。
【0020】
鎖錠手段19は、一対のロックピース49、51を備えている。ロックピース49、51は、動作桿11、13の動作方向Tとほぼ直交する方向に延長する棒状部材であり、相互に平行な関係で配置されている。また、ロックピース49、51はその長手方向すなわち動作方向Tとほぼ直交する方向にスライド可能に設けられている。ロックピース49、51には、ばねなどからなる付勢手段53、55が係合されており、常に動作桿11、13の本体部27、29に当接する方向に付勢されている。また、ロックピース49、51にはそれぞれ、鎖錠ローラ57、59とカム追従ローラ61、63とが転動可能に取り付けられている。鎖錠ローラ57、59は、動作桿11、13の本体部27、29に係合するように設けられ、カム追従ローラ61、63は、カム47に係合するように設けられている。
【0021】
鎖錠動作検知手段21は、揺動片65と、揺動量調整部材67と、回路制御器69とを備えている。揺動片65は、一対のロックピース49、51の間に揺動中心が位置するように、転てつ機1の図示しない基台に揺動可能に支持されている。揺動量調整部材67は、本実施の形態では、ボルト部材からなり、ロックピース49、51のそれぞれに2本ずつ取り付けられている。各ロックピース49、51においては、一対の揺動量調整部材67が揺動片65の対応する端部を挟むような位置関係で配置されている。回路制御器69は、揺動片65の揺動状態から鎖錠動作の完了又は非完了を検知し、その情報を管理者などのもとへ出力する。
【0022】
続いて、駆動手段15における転換ローラ39から動作桿11、13への駆動力伝達に関する構成について説明する。まず、動作桿11、13の本体部27、29には、転換ローラ39と係合するカム面71、73が形成されている。カム面71、73は、動作桿11、13の動作方向Tとほぼ直交する方向に延長し、且つ、駆動手段15側に向けて開口する切り欠きとして形成されている。さらに、カム面71の開口側の部分には、係合確保面75と係合回避面77とが形成され、カム面73の開口側の部分には、係合確保面79と係合回避面81とが形成されている。
【0023】
係合確保面75、79及び係合回避面77、81は共に、カム面71、73の側面を動作桿11、13の動作方向Tにさらに切り欠くようにして形成されている。また、係合確保面75、79と係合回避面77、81は、一つのカム面71、73において動作桿11、13の動作方向Tに対向するように配置されている。また、係合回避面77、81の切り欠き量は、係合確保面75、79の切り欠き量よりも大きくなっている。
【0024】
動作桿11における係合確保面75及び係合回避面77の位置関係と、動作桿13における係合確保面79及び係合回避面81の位置関係とは、動作桿11、13の動作方向Tに関して逆転している関係にある。すなわち、係合確保面75、79は、それぞれの動作桿において、後述のトングレールの開口動作時の前方側に配置されており、係合回避面77、81は、それぞれの動作桿において、後述のトングレールの接着動作時の前方側に配置されている。
【0025】
動作桿11、13の本体部27、29には、平面視矩形状のほぼ同じ大きさを有する貫通穴83、85が穿設されている。コイルばね17は、その巻軸が動作桿11、13の動作方向Tとほぼ平行となるように、貫通穴83、85内に収容されている。また、コイルばね17の各端部と、貫通穴83、85の画定部との間には、ばね受けが介在されている。
【0026】
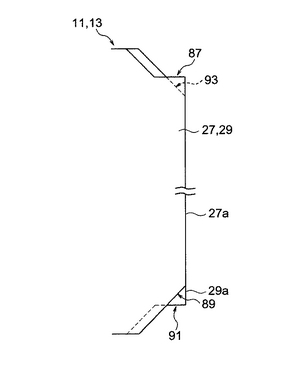
図2は、動作桿の本体部における鎖錠手段側の端部を示す図である。図1及び図2に示されるように、動作桿11の本体部27における鎖錠手段19側の端部には、鎖錠面87と解錠面89とが形成されており、動作桿13の本体部29における鎖錠手段19側の端部には、鎖錠面91と解錠面93とが形成されている。鎖錠面87、91と解錠面89、93は、一つの動作桿11、13の本体部27、29の動作方向Tの両側部において相互に反対方向を指向するように形成されている。鎖錠面87、91は、ロックピース49、51のスライド方向とほぼ平行な面から構成されている。また、解錠面89、93は、ロックピース49、51のスライド方向に対して傾斜されており、より詳細には、本体部27、29のロックピース49、51側の端面27a、29aに近づくほど本体部27、29の中央側に位置するような斜面から構成されている。
【0027】
動作桿11における鎖錠面87及び解錠面89の位置関係と、動作桿13における鎖錠面91及び解錠面93の位置関係とは、動作桿11、13の動作方向Tに関して逆転している関係にある。すなわち、解錠面89、93は、それぞれの動作桿において、後述のトングレールの接着動作時の前方側に配置されており、鎖錠面87、91は、それぞれの動作桿において、後述のトングレールの開口動作時の前方側に配置されている。
【0028】
次に、以上のような構成を有する転てつ機1の動作について説明する。まず、本明細書では、図1に示されるような状態を、定位として説明を行うが、本発明がこの定義に限定される趣旨ではない。図1に示される状態では、トングレール7が対応の基本レール3に対して開口しており、トングレール9が対応の基本レール5に対して接着している。ちなみに、定位の定常状態では、転換ローラ39が図1の状態よりも更に反時計方向に回転していて、カム面71、73から完全に退出している。なお、図の明瞭性を担保するため、トングレール9は基本レール5に対して僅かに離隔させて図示しているが実際には両者は接着状態にあるものとする。
【0029】
図1の状態は、定位への転換動作が適正に完了した時点の状態であり、動作桿11、13はそれぞれ、定位に対応する終端位置に到達している状態を示している。また、この状態では、一方のロックピース51が付勢手段55の作用によって他方のロックピース49よりも突出しており、鎖錠ローラ59が動作桿13の本体部29における鎖錠面91と当接している。これによって、トングレール接着側の動作桿13はトングレールの開口方向への動作を行うことが防止されており、すなわち、鎖錠されている。
【0030】
なお、トングレール接着側の動作桿とは、その時点でトングレールに接着している動作桿か、もしくは、トングレールに接着する方向に動作中の動作桿を示す。一方、トングレール開口側の動作桿とは、その時点でトングレールに対して開口している動作桿か、もしくは、トングレールに対する開口が拡大する方向に動作中の動作桿を示す。
【0031】
図1の定位の状態から、解錠して反位に転換する動作について説明する。まず、モータ35の稼動によって転換ギヤ37が時計方向に回転する。これによって、カム47も時計方向に回転すると共に、転換ローラ39も時計方向に円弧状に移動する。カム47においては、それまでロックピース51の突出による鎖錠がなされていたので、追従ローラ63が小径部47aに係合していた。しかし、カム47の時計方向回転によって大径部47bが追従ローラ63に係合することで、ロックピース51がロックピース49と揃うように図中右方向にスライドする。これによって、鎖錠ローラ59と鎖錠面91との当接が解消され、すなわち、鎖錠手段19の解錠がなされる。これにより、動作桿11、13がスライド可能な状態となる。
【0032】
また、かかる解錠と併行して、転換ローラ39は、カム面71、73の双方と係合し、切り欠きの深部へと進行しながら回転して、動作桿11、13に駆動力を伝達する。そして、かかる駆動力によって、トングレール接着側の動作桿13及びトングレール開口側の動作桿11が直線的にスライドして反位に向けて移動する。
【0033】
なお、動作桿11、13が定位又は反位に対応する終端位置に到達した場合には、鎖錠によるロックピース49、51の相対位置のズレが揺動量調整部材67の作用によって揺動片65の所定の傾斜角度として現れる。そして、回路制御器69が揺動片65の傾斜状態を検出することで、鎖錠手段19における鎖錠動作の完了が検知される。
【0034】
一方、定位の定常状態において、非開通進路を背向側から車両が進行してきた場合には、割出動作がなされる。まず、背向側から車両が進入してくると、その車輪によって、開口しているトングレール7が基本レール3への接着に向けて付勢される。これによりトングレール接着側の動作桿11は、図中下向きの駆動力を受ける。
【0035】
ここで、鎖錠手段19は、鎖錠ローラ59が動作桿13の鎖錠面91と当接することによって、動作桿13を鎖錠していたが、鎖錠ローラ59は動作桿11に対しては、解錠面89と当接するだけであった。したがって、動作桿11は、解錠面89の斜面によってロックピース51を図中右側にスライドさせながら図中下向きに移動することができる。そして、ロックピース51がある程度スライドすると、鎖錠ローラ59と鎖錠面91との当接が解消され、すなわち、鎖錠手段19の解錠がなされ、動作桿13が移動できる状態となる。
【0036】
また、鎖錠手段19による鎖錠状態では、動作桿11のみが移動し動作桿13は移動できないため、コイルばね17においては圧縮が進行している。よって、上記のように鎖錠手段19の解錠がなされると、コイルばね17における伸長方向の弾性力によって、動作桿13も動作桿11と同方向に移動する。そして、最終的には、駆動手段15からの駆動力は用いずに、背向方向からの車両の進行力によって、トングレール7が基本レール3に接着し、トングレール9が基本レール5から開口して、割出動作を完了させる。
【0037】
ところで、転換動作においては、定位又は反位の近傍区間で、接着側のトングレールと基本レールとの間に異物が介在するなどの理由から、接着側のトングレールが基本レールに適正に接着しない場合がある。この場合、従来の転てつ機では、転換ローラの駆動力がトングレール接着側及び開口側の動作桿の双方に伝達されるかあるいは少なくともトングレール接着側の動作桿には伝達されていたため、トングレール接着側の動作桿は変形しつつ定位又は反位に対応する終端位置まで移動してしまい、ロックピースの状態だけをみると、鎖錠が行われ、介在する異物が小さい場合、あたかも接着側のトングレールが基本レールに適正に接着しているかのように見受けられた。
【0038】
そこで、本実施の形態では、次のようにしてこのような現象を防止している。定位への転換動作において、図1の状態から転換ローラ39を時計方向に90度だけ戻した状態から説明すると、転換ローラ39はカム面71、73の深部において動作桿11、13の双方と係合している。そこから、転換ローラ39の反時計方向の回転が進行すると、トングレール開口側の動作桿11においては、カム面71の係合確保面75と転換ローラ39との係合が確保されている。一方、トングレール接着側の動作桿13においては、係合回避面81の切り欠き量が相対的に大きいため、転換ローラ39は係合回避面81と離隔した状態となる。すなわち、定位の近傍区間では、駆動手段15の駆動力は、トングレール開口側の動作桿11にのみ直接伝達されることとなる。
【0039】
上記のように、定位の近傍区間では、トングレール開口側の動作桿11は駆動手段15から直接伝達される駆動力によって移動し、トングレール接着側の動作桿13は、コイルばね17を介して伝達されるトングレール開口側の動作桿11の移動力、換言するならコイルばね17の弾性力によって移動する。このため、接着側のトングレール9と基本レール5との間に異物などが存在する場合には、トングレール開口側の動作桿11のみがさらに移動し、トングレール接着側の動作桿13は、コイルばね17が圧縮され、動作桿11から動作桿13へと伝達されるべき移動力を吸収することで、異物により移動を規制された位置でそのまま停止する。従って、トングレール接着側の動作桿13が、定位に対応する終端位置まで移動してしまい鎖錠手段19における鎖錠動作完了が誤って検知されることを防止することができる。
【0040】
なお、定位から反位への転換動作においても同様であり、反位の近傍区間では係合確保面79を介してトングレール開口側の動作桿13にのみ駆動力が伝達され、動作桿13の移動力がコイルばね17を介してトングレール接着側の動作桿11に伝達される。よって、トングレール接着側の動作桿11が異物などによって移動を規制された場合には、コイルばね17が動作桿13からの移動力を吸収し、トングレール接着側の動作桿11は規制された位置で停止する。よって、トングレール接着側の動作桿11が反位に対応する終端位置まで移動してしまい鎖錠手段19における鎖錠動作完了が誤って検知されることを防止することができる。
【0041】
以上のように、本実施の形態によれば、定位又は反位の近傍区間では、トングレール開口側の動作桿にのみ直接、駆動力を伝達し、トングレール接着側の動作桿には弾性部材を介してトングレール開口側の動作桿の移動力を伝達させているため、トングレール接着側の動作桿は、異物介在などが原因で移動が規制された場合には、そのまま停止することができ、定位又は反位に対応する終端位置まで移動してしまうことを防止することができる。したがって、従来のように鎖錠桿に依拠することなく、鎖錠手段の動作そのものに基づいて転換動作の完了や鎖錠を適正に検知することができる。
【0042】
また、鎖錠桿に依拠することなく、転換動作の完了や鎖錠を適正に検知することができるため、本実施の形態で示したように鎖錠桿自体を設けずに転てつ機を構成することができる。このため、長尺部材及びそれに付随する構成を省略することができ、転てつ機導入時時及び保守時における調整作業を簡易化することが可能となった。
【0043】
以上、好ましい実施の形態を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の改変態様を採り得ることは自明である。
【0044】
まず、上記実施の形態では、弾性手段としてコイルばねを採用していたが、本発明はこれに限定されるものではなく、板ばねなど他の形式のばねでもよい。更に、金属製のばねに限らず、樹脂からなる弾性力発生手段や、空気圧ばねや油圧ばねなどの流体圧を利用した弾性力発生手段であってもよい。
【0045】
また、本発明は、定位及び反位の近傍区間を除く動作区間では、転換ローラが実施の形態のように一対の動作桿のカム面の双方と当接していることを必ず要求されるものではない。よって、近傍区間を除く動作区間においても、動作桿の一方のカム面とのみ当接していてもよい。すなわち、本発明では、少なくとも近傍区間においてトングレール開口側の動作桿にのみ駆動力が直接伝達されるように構成されていれば、他の動作区間においては駆動力伝達態様は適宜改変しうるものである。
【0046】
また、駆動手段は、動作桿を直線的に駆動できれば特に限定はない。したがって、モータ以外の回転駆動力発生手段でもよいし、直線的な駆動力発生手段でもよい。よって、転換ローラの動作も円弧状には限定されず、例えば直線的な動作でもよい。
【0047】
さらに、本発明は、従来の鎖錠桿を具備する転てつ機に実施適用することも可能である。そのような構成においても、長尺の鎖錠桿の動作のみに依拠せずに鎖錠を検知できる。
【図面の簡単な説明】
【0048】
【図1】本発明の実施の形態に係る転てつ機の構成を示す図である。
【図2】動作桿におけるロックピースとの当接側端部を示す図である。
【符号の説明】
【0049】
1 転てつ機
3、5 基本レール
7、9 トングレール
11、13 動作桿
15 駆動手段
17 コイルばね(弾性手段)
19 鎖錠手段
21 鎖錠動作検知手段
39 転換ローラ(駆動手段)
71、73 カム面
75、79 係合確保面
77、81 係合回避面
【技術分野】
【0001】
本発明は、基本レールに対しトングレールの転換を行う転てつ機に関するものである。
【背景技術】
【0002】
従来より、鉄道分野において、割出電気転てつ機が存在している(特許文献1参照)。割出電気転てつ機は、一対のトングレールを定位及び反位の間で転換させる転換機能、転換終了時にトングレールの状態を維持する鎖錠機能、さらに非開通進路を背向側から進行してきた車両の軌道を確保するための背向割出機能などが実現されている。
【0003】
具体的には、割出電気転てつ機は、トングレールを移動させるための動作桿や、動作桿を駆動するための転換ローラなどを用いて、転換機能を実現しており、また、トングレールの先端部の位置を検出する鎖錠桿や、鎖錠桿を鎖錠するロックピースなどを用いて、鎖錠機能を実現していた。さらに、背向割出機能を実現するため、上述した動作桿や鎖錠桿はトングレール毎に個別に移動できるよう2本ずつ設けられていた。
【0004】
転換動作は、円弧状に移動する転換ローラと、動作桿のそれぞれに切り欠き形成されたカム面との係合により、動作桿が移動することで行われていた。カム面の入口は逃げ幅の大きい切り欠き面と逃げ幅の小さい切り欠き面とを有していた。そして、接着側となるトングレールの動作桿において転換ローラから接着方向の駆動力を受ける部位に、逃げ幅の小さい切り欠き面が形成されており、開口側となるトングレールの動作桿において転換ローラから開口方向の駆動力を受ける部位に、逃げ幅の大きい切り欠き面が形成されていた。これにより、転換完了状態に近い状態においては、転換ローラが接着側トングレールの動作桿と十分に当接し、接着側トングレールに接着完了まで確実に接着力を伝達できるようになっていた。
【0005】
また、転換動作時には、接着側トングレールの動作桿は本来の転換完了位置に移動しておりながら、接着側トングレール自体は異物などの介在によって基本レールに適正に接着していないことも起こりえる。この場合にも、接着側トングレールの鎖錠桿が接着側トングレールの先端部の非接触状態を検出し、ロックピースが本来の施錠位置まで到達していないことをもって、転換動作が適正に完了していないことを検知することができた。
【特許文献1】特開平7−96836号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来の割出電気転てつ機においては、動作桿及び鎖錠桿が各2本ずつ、すなわち長尺部材が4本設けられていたため、導入時及び保守時の調整作業が煩雑で、簡易化が望まれていた。
【0007】
また、転換動作の完了検知や鎖錠は鎖錠桿を用いて行われていたが、鎖錠桿のような長尺部材の動作に依存せずに、転換動作の完了検知や鎖錠が実施できれば、より好ましい。
【0008】
現在、特に車両の入換えや留置などを目的とした側線の用途においては、鎖錠桿を用いずに転換動作の完了検知や鎖錠が確実に行えることが要望されている。
【0009】
本発明は、上述した事情に鑑みてなされたものであり、鎖錠桿を用いずに或いは鎖錠桿に依拠せずにトングレールが適正に鎖錠されているか否かの検知が行える転てつ機を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明に係る転てつ機は、定位及び反位の間で転換動作可能な一対のトングレールを動作させる一対の動作桿と、前記一対の動作桿を駆動する駆動手段であって、少なくとも前記定位又は反位の近傍区間においては該一対の動作桿のうちトングレール開口側の動作桿にのみ駆動力を付与する駆動手段と、少なくとも前記近傍区間において、前記トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達する弾性手段と、前記トングレール接着側の動作桿が前記定位又は反位に対応する終端位置に到達しているときに、該トングレール接着側の動作桿を鎖錠する鎖錠手段と、前記鎖錠手段における鎖錠動作完了又は非完了を検知する鎖錠動作検知手段とを備えたことを特徴とする。
【0011】
また、好適には、前記駆動手段は、円弧状に移動する転換ローラを備え、前記一対の動作桿はそれぞれ、前記転換ローラと係合するカム面を備え、前記カム面のそれぞれには、相対的に切り欠き量の小さい係合確保面と切り欠き量の大きい係合回避面とが含まれており、前記係合確保面及び係合回避面は、動作桿の動作方向に対向して形成されており、前記一対の動作桿は、トングレールの開口動作前方側に係合確保面を有し、トングレールの接着動作前方側に係合回避面を有している。
【0012】
さらに、好適には、本発明の転てつ機は、割出機能を備えており、前記弾性手段は、割出動作時、前記一対の動作桿のうち一方の動作桿のみが動作して前記鎖錠手段を解錠することを許容し、且つ、解錠後は、前記一方の動作桿の移動力を他方の動作桿に伝達する。
【発明の効果】
【0013】
本発明によれば、定位又は反位の近傍区間では、トングレール開口側の動作桿にのみ直接、駆動力を伝達し、トングレール接着側の動作桿には弾性部材を介してトングレール開口側の動作桿の移動力を伝達させているため、トングレール接着側の動作桿は、異物介在などが原因で移動が規制された場合には、そのまま停止することができ、定位又は反位に対応する終端位置まで移動してしまうことを防止することができる。したがって、従来のように鎖錠桿に依拠することなく、転換動作の完了や鎖錠を適正に検知することができる。さらに、鎖錠桿を省略することができ、保守調整の簡易化に寄与することができる。
【0014】
さらに、弾性手段が、一方の動作桿のみが動作して鎖錠手段を解錠することを許容し、且つ、解錠後は、一方の動作桿の移動力を他方の動作桿に伝達するように機能する場合には、上記のように鎖錠桿に依拠しない鎖錠検知を可能とすると共に、割出機能も確保することができる。
【0015】
なお、本発明の他の特徴及びそれによる作用効果は、添付図面を参照し、実施の形態によって更に詳しく説明する。
【発明を実施するための最良の形態】
【0016】
以下、この発明に係る転てつ機を、側線用の割出電気転てつ機として実施した場合の実施の形態を、添付図面に基づいて説明する。なお、図中、同一符号は同一又は対応部分を示すものとする。また、本発明は、側線用に限定して実施されるものではない。
【0017】
図1において、転てつ機1は、一対の基本レール3、5に対して定位及び反位の間でトングレール7、9を転換動作させる。転てつ機1は、主に、一対の動作桿11、13と、駆動手段15と、弾性手段としてのコイルばね17と、鎖錠手段19と、鎖錠動作検知手段21とを備える。
【0018】
一対の動作桿11、13は、基本レール3、5やトングレール7、9の間隔方向に延長する腕部23、25と、駆動手段15からの駆動力を受ける本体部27、29とを備える。本体部27、29は、腕部23、25の一端側に設けられており、腕部23、25の他端は、ロッド31、33を介して対応するトングレール7、9に接続している。
【0019】
駆動手段15は、モータ35と、転換ギヤ37と、転換ギヤ37に自転可能に設けられた転換ローラ39とを備えている。モータ35の出力軸には傘歯車41が取り付けられており、傘歯車41と転換ギヤ37との間には、第1中間ギヤ43及び第2中間ギヤ45がトルク伝達関係で配置されている。転換ローラ39は、その軸心が転換ギヤ37の回転中心Oから所定距離だけ径方向に離隔する位置にあるように、転換ギヤ37に取り付けられている。また、転換ギヤ37には、回転中心Oと同心的に回転するカム47が設けられている。
【0020】
鎖錠手段19は、一対のロックピース49、51を備えている。ロックピース49、51は、動作桿11、13の動作方向Tとほぼ直交する方向に延長する棒状部材であり、相互に平行な関係で配置されている。また、ロックピース49、51はその長手方向すなわち動作方向Tとほぼ直交する方向にスライド可能に設けられている。ロックピース49、51には、ばねなどからなる付勢手段53、55が係合されており、常に動作桿11、13の本体部27、29に当接する方向に付勢されている。また、ロックピース49、51にはそれぞれ、鎖錠ローラ57、59とカム追従ローラ61、63とが転動可能に取り付けられている。鎖錠ローラ57、59は、動作桿11、13の本体部27、29に係合するように設けられ、カム追従ローラ61、63は、カム47に係合するように設けられている。
【0021】
鎖錠動作検知手段21は、揺動片65と、揺動量調整部材67と、回路制御器69とを備えている。揺動片65は、一対のロックピース49、51の間に揺動中心が位置するように、転てつ機1の図示しない基台に揺動可能に支持されている。揺動量調整部材67は、本実施の形態では、ボルト部材からなり、ロックピース49、51のそれぞれに2本ずつ取り付けられている。各ロックピース49、51においては、一対の揺動量調整部材67が揺動片65の対応する端部を挟むような位置関係で配置されている。回路制御器69は、揺動片65の揺動状態から鎖錠動作の完了又は非完了を検知し、その情報を管理者などのもとへ出力する。
【0022】
続いて、駆動手段15における転換ローラ39から動作桿11、13への駆動力伝達に関する構成について説明する。まず、動作桿11、13の本体部27、29には、転換ローラ39と係合するカム面71、73が形成されている。カム面71、73は、動作桿11、13の動作方向Tとほぼ直交する方向に延長し、且つ、駆動手段15側に向けて開口する切り欠きとして形成されている。さらに、カム面71の開口側の部分には、係合確保面75と係合回避面77とが形成され、カム面73の開口側の部分には、係合確保面79と係合回避面81とが形成されている。
【0023】
係合確保面75、79及び係合回避面77、81は共に、カム面71、73の側面を動作桿11、13の動作方向Tにさらに切り欠くようにして形成されている。また、係合確保面75、79と係合回避面77、81は、一つのカム面71、73において動作桿11、13の動作方向Tに対向するように配置されている。また、係合回避面77、81の切り欠き量は、係合確保面75、79の切り欠き量よりも大きくなっている。
【0024】
動作桿11における係合確保面75及び係合回避面77の位置関係と、動作桿13における係合確保面79及び係合回避面81の位置関係とは、動作桿11、13の動作方向Tに関して逆転している関係にある。すなわち、係合確保面75、79は、それぞれの動作桿において、後述のトングレールの開口動作時の前方側に配置されており、係合回避面77、81は、それぞれの動作桿において、後述のトングレールの接着動作時の前方側に配置されている。
【0025】
動作桿11、13の本体部27、29には、平面視矩形状のほぼ同じ大きさを有する貫通穴83、85が穿設されている。コイルばね17は、その巻軸が動作桿11、13の動作方向Tとほぼ平行となるように、貫通穴83、85内に収容されている。また、コイルばね17の各端部と、貫通穴83、85の画定部との間には、ばね受けが介在されている。
【0026】
図2は、動作桿の本体部における鎖錠手段側の端部を示す図である。図1及び図2に示されるように、動作桿11の本体部27における鎖錠手段19側の端部には、鎖錠面87と解錠面89とが形成されており、動作桿13の本体部29における鎖錠手段19側の端部には、鎖錠面91と解錠面93とが形成されている。鎖錠面87、91と解錠面89、93は、一つの動作桿11、13の本体部27、29の動作方向Tの両側部において相互に反対方向を指向するように形成されている。鎖錠面87、91は、ロックピース49、51のスライド方向とほぼ平行な面から構成されている。また、解錠面89、93は、ロックピース49、51のスライド方向に対して傾斜されており、より詳細には、本体部27、29のロックピース49、51側の端面27a、29aに近づくほど本体部27、29の中央側に位置するような斜面から構成されている。
【0027】
動作桿11における鎖錠面87及び解錠面89の位置関係と、動作桿13における鎖錠面91及び解錠面93の位置関係とは、動作桿11、13の動作方向Tに関して逆転している関係にある。すなわち、解錠面89、93は、それぞれの動作桿において、後述のトングレールの接着動作時の前方側に配置されており、鎖錠面87、91は、それぞれの動作桿において、後述のトングレールの開口動作時の前方側に配置されている。
【0028】
次に、以上のような構成を有する転てつ機1の動作について説明する。まず、本明細書では、図1に示されるような状態を、定位として説明を行うが、本発明がこの定義に限定される趣旨ではない。図1に示される状態では、トングレール7が対応の基本レール3に対して開口しており、トングレール9が対応の基本レール5に対して接着している。ちなみに、定位の定常状態では、転換ローラ39が図1の状態よりも更に反時計方向に回転していて、カム面71、73から完全に退出している。なお、図の明瞭性を担保するため、トングレール9は基本レール5に対して僅かに離隔させて図示しているが実際には両者は接着状態にあるものとする。
【0029】
図1の状態は、定位への転換動作が適正に完了した時点の状態であり、動作桿11、13はそれぞれ、定位に対応する終端位置に到達している状態を示している。また、この状態では、一方のロックピース51が付勢手段55の作用によって他方のロックピース49よりも突出しており、鎖錠ローラ59が動作桿13の本体部29における鎖錠面91と当接している。これによって、トングレール接着側の動作桿13はトングレールの開口方向への動作を行うことが防止されており、すなわち、鎖錠されている。
【0030】
なお、トングレール接着側の動作桿とは、その時点でトングレールに接着している動作桿か、もしくは、トングレールに接着する方向に動作中の動作桿を示す。一方、トングレール開口側の動作桿とは、その時点でトングレールに対して開口している動作桿か、もしくは、トングレールに対する開口が拡大する方向に動作中の動作桿を示す。
【0031】
図1の定位の状態から、解錠して反位に転換する動作について説明する。まず、モータ35の稼動によって転換ギヤ37が時計方向に回転する。これによって、カム47も時計方向に回転すると共に、転換ローラ39も時計方向に円弧状に移動する。カム47においては、それまでロックピース51の突出による鎖錠がなされていたので、追従ローラ63が小径部47aに係合していた。しかし、カム47の時計方向回転によって大径部47bが追従ローラ63に係合することで、ロックピース51がロックピース49と揃うように図中右方向にスライドする。これによって、鎖錠ローラ59と鎖錠面91との当接が解消され、すなわち、鎖錠手段19の解錠がなされる。これにより、動作桿11、13がスライド可能な状態となる。
【0032】
また、かかる解錠と併行して、転換ローラ39は、カム面71、73の双方と係合し、切り欠きの深部へと進行しながら回転して、動作桿11、13に駆動力を伝達する。そして、かかる駆動力によって、トングレール接着側の動作桿13及びトングレール開口側の動作桿11が直線的にスライドして反位に向けて移動する。
【0033】
なお、動作桿11、13が定位又は反位に対応する終端位置に到達した場合には、鎖錠によるロックピース49、51の相対位置のズレが揺動量調整部材67の作用によって揺動片65の所定の傾斜角度として現れる。そして、回路制御器69が揺動片65の傾斜状態を検出することで、鎖錠手段19における鎖錠動作の完了が検知される。
【0034】
一方、定位の定常状態において、非開通進路を背向側から車両が進行してきた場合には、割出動作がなされる。まず、背向側から車両が進入してくると、その車輪によって、開口しているトングレール7が基本レール3への接着に向けて付勢される。これによりトングレール接着側の動作桿11は、図中下向きの駆動力を受ける。
【0035】
ここで、鎖錠手段19は、鎖錠ローラ59が動作桿13の鎖錠面91と当接することによって、動作桿13を鎖錠していたが、鎖錠ローラ59は動作桿11に対しては、解錠面89と当接するだけであった。したがって、動作桿11は、解錠面89の斜面によってロックピース51を図中右側にスライドさせながら図中下向きに移動することができる。そして、ロックピース51がある程度スライドすると、鎖錠ローラ59と鎖錠面91との当接が解消され、すなわち、鎖錠手段19の解錠がなされ、動作桿13が移動できる状態となる。
【0036】
また、鎖錠手段19による鎖錠状態では、動作桿11のみが移動し動作桿13は移動できないため、コイルばね17においては圧縮が進行している。よって、上記のように鎖錠手段19の解錠がなされると、コイルばね17における伸長方向の弾性力によって、動作桿13も動作桿11と同方向に移動する。そして、最終的には、駆動手段15からの駆動力は用いずに、背向方向からの車両の進行力によって、トングレール7が基本レール3に接着し、トングレール9が基本レール5から開口して、割出動作を完了させる。
【0037】
ところで、転換動作においては、定位又は反位の近傍区間で、接着側のトングレールと基本レールとの間に異物が介在するなどの理由から、接着側のトングレールが基本レールに適正に接着しない場合がある。この場合、従来の転てつ機では、転換ローラの駆動力がトングレール接着側及び開口側の動作桿の双方に伝達されるかあるいは少なくともトングレール接着側の動作桿には伝達されていたため、トングレール接着側の動作桿は変形しつつ定位又は反位に対応する終端位置まで移動してしまい、ロックピースの状態だけをみると、鎖錠が行われ、介在する異物が小さい場合、あたかも接着側のトングレールが基本レールに適正に接着しているかのように見受けられた。
【0038】
そこで、本実施の形態では、次のようにしてこのような現象を防止している。定位への転換動作において、図1の状態から転換ローラ39を時計方向に90度だけ戻した状態から説明すると、転換ローラ39はカム面71、73の深部において動作桿11、13の双方と係合している。そこから、転換ローラ39の反時計方向の回転が進行すると、トングレール開口側の動作桿11においては、カム面71の係合確保面75と転換ローラ39との係合が確保されている。一方、トングレール接着側の動作桿13においては、係合回避面81の切り欠き量が相対的に大きいため、転換ローラ39は係合回避面81と離隔した状態となる。すなわち、定位の近傍区間では、駆動手段15の駆動力は、トングレール開口側の動作桿11にのみ直接伝達されることとなる。
【0039】
上記のように、定位の近傍区間では、トングレール開口側の動作桿11は駆動手段15から直接伝達される駆動力によって移動し、トングレール接着側の動作桿13は、コイルばね17を介して伝達されるトングレール開口側の動作桿11の移動力、換言するならコイルばね17の弾性力によって移動する。このため、接着側のトングレール9と基本レール5との間に異物などが存在する場合には、トングレール開口側の動作桿11のみがさらに移動し、トングレール接着側の動作桿13は、コイルばね17が圧縮され、動作桿11から動作桿13へと伝達されるべき移動力を吸収することで、異物により移動を規制された位置でそのまま停止する。従って、トングレール接着側の動作桿13が、定位に対応する終端位置まで移動してしまい鎖錠手段19における鎖錠動作完了が誤って検知されることを防止することができる。
【0040】
なお、定位から反位への転換動作においても同様であり、反位の近傍区間では係合確保面79を介してトングレール開口側の動作桿13にのみ駆動力が伝達され、動作桿13の移動力がコイルばね17を介してトングレール接着側の動作桿11に伝達される。よって、トングレール接着側の動作桿11が異物などによって移動を規制された場合には、コイルばね17が動作桿13からの移動力を吸収し、トングレール接着側の動作桿11は規制された位置で停止する。よって、トングレール接着側の動作桿11が反位に対応する終端位置まで移動してしまい鎖錠手段19における鎖錠動作完了が誤って検知されることを防止することができる。
【0041】
以上のように、本実施の形態によれば、定位又は反位の近傍区間では、トングレール開口側の動作桿にのみ直接、駆動力を伝達し、トングレール接着側の動作桿には弾性部材を介してトングレール開口側の動作桿の移動力を伝達させているため、トングレール接着側の動作桿は、異物介在などが原因で移動が規制された場合には、そのまま停止することができ、定位又は反位に対応する終端位置まで移動してしまうことを防止することができる。したがって、従来のように鎖錠桿に依拠することなく、鎖錠手段の動作そのものに基づいて転換動作の完了や鎖錠を適正に検知することができる。
【0042】
また、鎖錠桿に依拠することなく、転換動作の完了や鎖錠を適正に検知することができるため、本実施の形態で示したように鎖錠桿自体を設けずに転てつ機を構成することができる。このため、長尺部材及びそれに付随する構成を省略することができ、転てつ機導入時時及び保守時における調整作業を簡易化することが可能となった。
【0043】
以上、好ましい実施の形態を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の改変態様を採り得ることは自明である。
【0044】
まず、上記実施の形態では、弾性手段としてコイルばねを採用していたが、本発明はこれに限定されるものではなく、板ばねなど他の形式のばねでもよい。更に、金属製のばねに限らず、樹脂からなる弾性力発生手段や、空気圧ばねや油圧ばねなどの流体圧を利用した弾性力発生手段であってもよい。
【0045】
また、本発明は、定位及び反位の近傍区間を除く動作区間では、転換ローラが実施の形態のように一対の動作桿のカム面の双方と当接していることを必ず要求されるものではない。よって、近傍区間を除く動作区間においても、動作桿の一方のカム面とのみ当接していてもよい。すなわち、本発明では、少なくとも近傍区間においてトングレール開口側の動作桿にのみ駆動力が直接伝達されるように構成されていれば、他の動作区間においては駆動力伝達態様は適宜改変しうるものである。
【0046】
また、駆動手段は、動作桿を直線的に駆動できれば特に限定はない。したがって、モータ以外の回転駆動力発生手段でもよいし、直線的な駆動力発生手段でもよい。よって、転換ローラの動作も円弧状には限定されず、例えば直線的な動作でもよい。
【0047】
さらに、本発明は、従来の鎖錠桿を具備する転てつ機に実施適用することも可能である。そのような構成においても、長尺の鎖錠桿の動作のみに依拠せずに鎖錠を検知できる。
【図面の簡単な説明】
【0048】
【図1】本発明の実施の形態に係る転てつ機の構成を示す図である。
【図2】動作桿におけるロックピースとの当接側端部を示す図である。
【符号の説明】
【0049】
1 転てつ機
3、5 基本レール
7、9 トングレール
11、13 動作桿
15 駆動手段
17 コイルばね(弾性手段)
19 鎖錠手段
21 鎖錠動作検知手段
39 転換ローラ(駆動手段)
71、73 カム面
75、79 係合確保面
77、81 係合回避面
【特許請求の範囲】
【請求項1】
定位及び反位の間で転換動作可能な一対のトングレールを動作させる一対の動作桿と、
前記一対の動作桿を駆動する駆動手段であって、少なくとも前記定位又は反位の近傍区間においては該一対の動作桿のうちトングレール開口側の動作桿にのみ駆動力を付与する駆動手段と、
少なくとも前記近傍区間において、前記トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達する弾性手段と、
前記トングレール接着側の動作桿が前記定位又は反位に対応する終端位置に到達しているときに、該トングレール接着側の動作桿を鎖錠する鎖錠手段と、
前記鎖錠手段における鎖錠動作完了又は非完了を検知する鎖錠動作検知手段と
を備えたことを特徴とする転てつ機。
【請求項2】
前記駆動手段は、円弧状に移動する転換ローラを備え、
前記一対の動作桿はそれぞれ、前記転換ローラと係合するカム面を備え、
前記カム面のそれぞれには、相対的に切り欠き量の小さい係合確保面と切り欠き量の大きい係合回避面とが含まれており、
前記係合確保面及び係合回避面は、動作桿の動作方向に対向して形成されており、
前記一対の動作桿は、トングレールの開口動作前方側に係合確保面を有し、トングレールの接着動作前方側に係合回避面を有している、
ことを特徴とする請求項1に記載の転てつ機。
【請求項3】
前記転てつ機は割出機能を備えており、
前記弾性手段は、割出動作時、前記一対の動作桿のうち一方の動作桿のみが動作して前記鎖錠手段を解錠することを許容し、且つ、解錠後は、前記一方の動作桿の移動力を他方の動作桿に伝達する、
ことを特徴とする請求項1又は2に記載の転てつ機。
【請求項1】
定位及び反位の間で転換動作可能な一対のトングレールを動作させる一対の動作桿と、
前記一対の動作桿を駆動する駆動手段であって、少なくとも前記定位又は反位の近傍区間においては該一対の動作桿のうちトングレール開口側の動作桿にのみ駆動力を付与する駆動手段と、
少なくとも前記近傍区間において、前記トングレール開口側の動作桿の駆動力をトングレール接着側の動作桿に伝達する弾性手段と、
前記トングレール接着側の動作桿が前記定位又は反位に対応する終端位置に到達しているときに、該トングレール接着側の動作桿を鎖錠する鎖錠手段と、
前記鎖錠手段における鎖錠動作完了又は非完了を検知する鎖錠動作検知手段と
を備えたことを特徴とする転てつ機。
【請求項2】
前記駆動手段は、円弧状に移動する転換ローラを備え、
前記一対の動作桿はそれぞれ、前記転換ローラと係合するカム面を備え、
前記カム面のそれぞれには、相対的に切り欠き量の小さい係合確保面と切り欠き量の大きい係合回避面とが含まれており、
前記係合確保面及び係合回避面は、動作桿の動作方向に対向して形成されており、
前記一対の動作桿は、トングレールの開口動作前方側に係合確保面を有し、トングレールの接着動作前方側に係合回避面を有している、
ことを特徴とする請求項1に記載の転てつ機。
【請求項3】
前記転てつ機は割出機能を備えており、
前記弾性手段は、割出動作時、前記一対の動作桿のうち一方の動作桿のみが動作して前記鎖錠手段を解錠することを許容し、且つ、解錠後は、前記一方の動作桿の移動力を他方の動作桿に伝達する、
ことを特徴とする請求項1又は2に記載の転てつ機。
【図1】


【図2】
【図2】
【公開番号】特開2006−214146(P2006−214146A)
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願番号】特願2005−27454(P2005−27454)
【出願日】平成17年2月3日(2005.2.3)
【出願人】(000004651)日本信号株式会社 (720)
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願日】平成17年2月3日(2005.2.3)
【出願人】(000004651)日本信号株式会社 (720)
[ Back to top ]