
転倒検出システム、転倒検出装置、転倒検出方法およびプログラム
【課題】検出対象の転倒を検出するためのシステム、装置、方法およびプログラムを提供すること。
【解決手段】情報処理装置110は、並進加速度データおよび角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出部310と、角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出部314と、抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、検出対象が転倒したことを判断する転倒判断部318とを含んでいる。
【解決手段】情報処理装置110は、並進加速度データおよび角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出部310と、角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出部314と、抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、検出対象が転倒したことを判断する転倒判断部318とを含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出対象の転倒を検出するためのシステム、装置、方法およびプログラムに関する。
【背景技術】
【0002】
検出対象の転倒を検出する技術は、近年、在宅介護、介護援助用車両などの他、車両用の搭乗者サポート装置において、要介護者の転倒や、車両の転倒・衝突などを検出し、迅速な介護要請を発行したり、エアバッグの起動を行うなどの観点から注目されている。転倒対象が人間である場合、転倒の原因、状態、場所などに対応して複数の転倒態様が想定される。また、検出対象が人間の場合、転倒に際して多くの関節が転倒時に連携して衝撃に備えるための防御行動を行う。検出対象の転倒は、各種センサを使用して、センサ検出値に基づいて転倒の判定を行うことになるが、上述したように、転倒の態様は多種多様なので、いかにして検出対象が転倒したかを判定するかが問題となる。
【0003】
従来から、検出対象の転倒を検出するためのシステムが各種提案されている。例えば、特開2005−237576号公報(特許文献1)では、転倒判定装置が記載されており、開示された装置は、被験者の体幹に取り付けた3軸方向の加速度および角速度を使用し、体幹の鉛直方向の変位量を計算して転倒を判断することにより転倒後判定を減少させている。また、特開2007−151948号公報(特許文献2)では、転倒判定方法および装置が記載されており、被験者の体幹に取り付けた互いに直交する3軸の加速度および角速度を検出し、各軸方向の躍度を計算し、躍度の値から転倒が判断されている。
【0004】
また、特開2009−163538号公報(特許文献3)では、転倒動作パターンが様々な動きを含む場合にも高い精度で転倒を判断するシステムが記載されている。特許文献3に記載されたシステムは、体幹の鉛直方向の変位量に応じた値を出力するセンサと転倒と疑われる事象が発生したか否かを判断し、当該判断により転倒と疑われる事象の発生と判断した時点からの体幹の鉛直方向における変位量を計算し、変位総量から転倒を判断する。さらに、特開2007−260389号公報(特許文献4)では、短時間で転倒を推知でき誤検知が少ない転倒検知装置が記載されている。特許文献4に記載された装置は、体幹の前後方向の軸回りの角速度と傾斜角度とを検出し、転倒の判断を行っている。
【0005】
さらに、ウェアラブルセンサを利用した転倒検出については、M. Kangas et al., “Sensorband fall detector prototype: validation through data collection and analysis revised version”, ISMICT2007, ID1217, December 2007(非特許文献1)において報告されている。また、本発明者らも、Y.Enomoto et al., “Data Processing for Fall Detection using an Acceleration Sensor”, ICCCS2009, A4-02, 2009(非特許文献2)において加速度センサを使用した転倒検出を報告している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−237576号公報
【特許文献2】特開2007−151948号公報
【特許文献3】特開2009−163538号公報
【特許文献4】特開2007−260389号公報
【非特許文献】
【0007】
【非特許文献1】M. Kangas et al., “Sensorband fall detector prototype: validation through data collection and analysis revised version”, ISMICT2007, ID1217, December 2007
【非特許文献2】Y.Enomoto et al., “Data Processing for Fall Detection using an Acceleration Sensor”, ICCCS2009, A4-02, 2009
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、種々の転倒検出のための装置および方法が提案されているものの、多種多様な転倒態様について、転倒検出の確実性を高めることが引き続き必要とされていた。さらに、転倒検出を高精度かつ高速に行うとともに、効率的な転倒予測を可能とすることが必要とされていた。また、介護用車両などに搭載でき、小型で低消費電力の転倒検出装置が必要とされていた。
【課題を解決するための手段】
【0009】
本発明は、上記従来技術に鑑みてなされたものであり、本発明では、3軸加速度と、3軸角速度とを同時計測可能なセンサを使用し、検出対象の転倒に関連するパラメータを取得する。本発明では、3軸加速度および3軸角速度についてそれぞれの絶対最大値を時間的に追跡し、3軸加速度および3軸角速度の時間シーケンスにおけるそれぞれの最大値をサンプリングする。
【0010】
転倒の判断は、時間シーケンス上での最大加速度値を使用して判別値を計算して、判別値が設定された加速度しきい値を超え、かつ角速度の最大値が設定した各角速度しきい値を超えたことに応答して判定される。また、他の実施形態では、転倒と判断された時刻の前後で角速度を数値積分して角度変化を計算し、さらに角度変化について設定された角度変化しきい値を超えたことに応答して転倒を判断する。なお、本発明では、鉛直方向の加速度を判定に使用することなく、転倒検出を高精度に行うことができる。
【0011】
さらに本発明の他の実施形態では、加速度データに基づく転倒判断成立から、角速度の最大値が設定されたしきい値を超えるまでの時間的順序および時間間隔を利用して転倒予測および転倒判断を行うことができる。
【発明の効果】
【0012】
本発明によれば、転倒検出を高精度かつ高速に行うとともに、効率的な転倒予測を可能とし、介護用車両などに搭載でき、車載型として実装した場合に小型で低消費電力化が可能な転倒検出システム、転倒検出装置、転倒検出方法およびプログラムが提供できる。
【図面の簡単な説明】
【0013】
【図1】本実施形態の転倒検出システム100の第1の実施形態を示した図。
【図2】本実施形態の転倒検出システム200の第2および第3の実施形態を示した図。
【図3】本実施形態の情報処理装置110の機能ブロック300を示した図。
【図4】情報処理装置110が実行する第1の実施形態の転倒検出方法のフローチャート。
【図5】情報処理装置110が実行する第2の実施形態の転倒検出方法のフローチャート。
【図6】転倒検出方法の第3の実施形態のフローチャート。
【図7】本実施形態の他の実施形態における転倒検出システム700の実施形態を示した図。
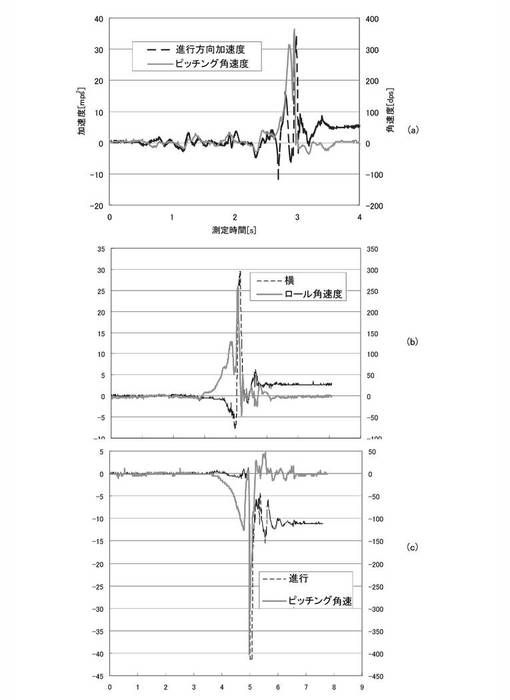
【図8】本実施形態により取得された加速度データおよび角速度データの時間シーケンスの実施形態を、進行方向に転倒する転倒事象(a)、進行方向に対して横に転倒する転倒現象(b)、および進行方向に対して後ろ向きに倒れる転倒事象(c)として示した図。
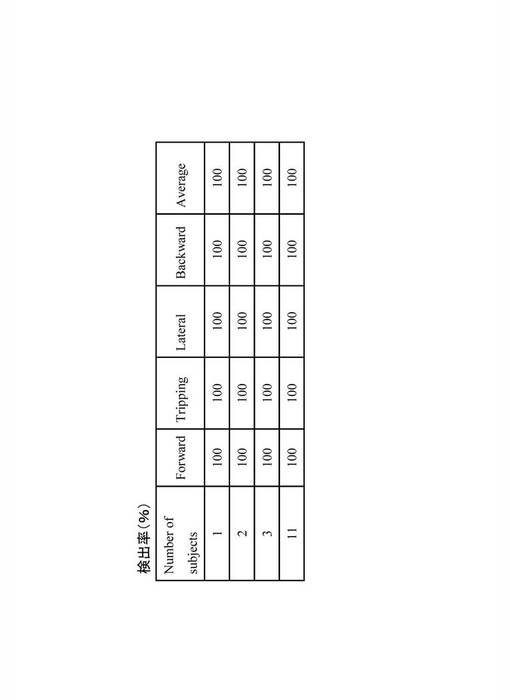
【図9】転倒事象の判断を行った実施例の結果を示した表。
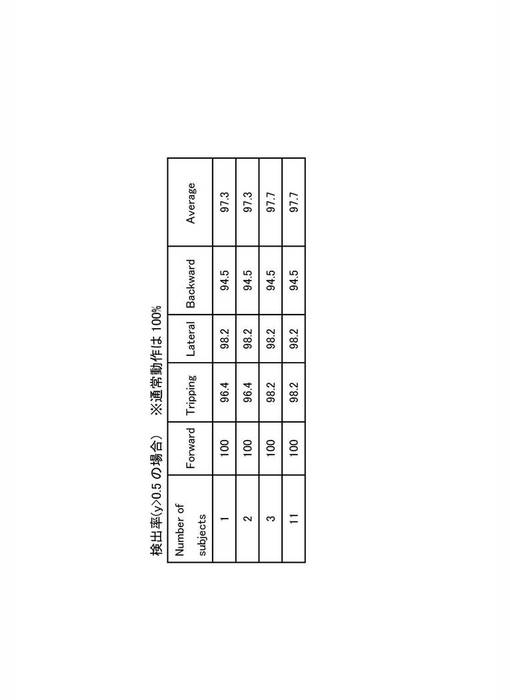
【図10】転倒事象の判断を行った比較例の結果を示した表。
【発明を実施するための形態】
【0014】
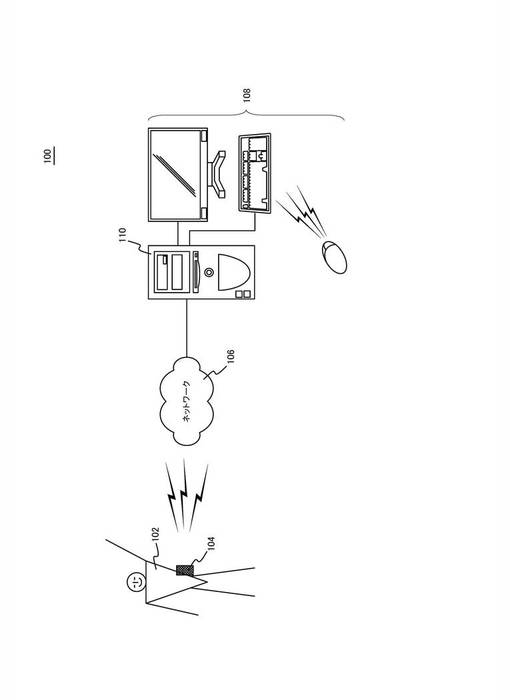
以下、本発明を実施形態をもって説明するが、本発明は、後述する実施形態に限定されるものではない。図1は、本実施形態の転倒検出システム100の第1の実施形態を示す。図1に示した転倒検出システム100は、検出対象102に装着または取り付けられたセンサ104を含んでいる。センサ104は、3軸回りの角速度の他、3軸回りの軸方向に沿った加速度を測定することが可能であり、センサ104が取得した加速度データおよび角速度データは、IEEE802.xやBlueTooth(登録商標)といったワイヤレスネットワークおよびインターネットなどのネットワーク106を介して転倒検出装置108に送付することができる。
【0015】
転倒検出装置108は、図1に示した実施形態では、パーソナルコンピュータ、ワークステーションまたはサーバなどの情報処理装置110として実装されている。情報処理装置110には、ディスプレイ装置、キーボード、およびマウスといった入出力装置が接続されていて、情報処理装置110に対して各種の処理を指令し、また情報処理装置の処理結果を外部出力可能としている。
【0016】
情報処理装置110は、PENTIUM(登録商標)、Celeron(登録商標)、Xeon(登録商標)、CORE 2 DUO(登録商標)、PENTIUM(登録商標)互換チップなど、CISCアーキテクチャのマイクロプロセッサ、または、POWERPC(登録商標)などのRISCアーキテクチャのマイクロプロセッサを、シングルコアまたはマルチコアの形態で実装することができる。また、情報処理装置110は、WINDOWS(登録商標)2000、WINDOWS(登録商標)XP、WINDOWS 7(登録商標)、UNIX(登録商標)、LINUX(登録商標)などのオペレーティングシステムにより制御されていて、C、C++、JAVA(登録商標)、JAVASCRIPT(登録商標)、PERL、RUBYなどのプログラミング言語を使用して実装されるプログラムを実行し、転倒検出のための処理を実行する。
【0017】
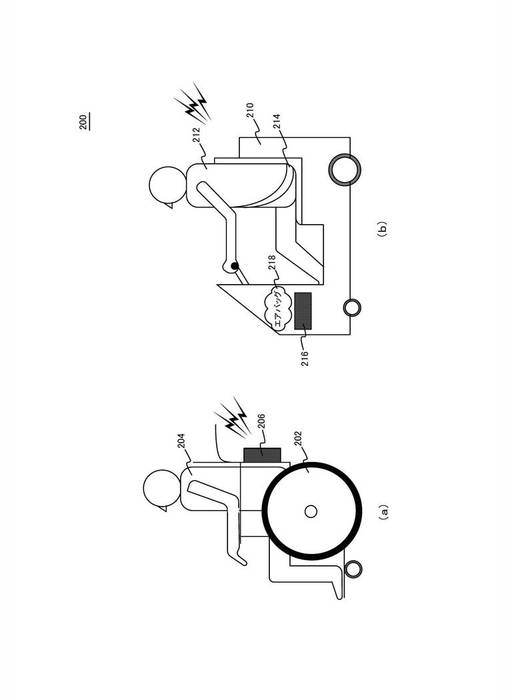
図2は、本実施形態の転倒検出システム200の第2および第3の実施形態を示す。第2の実施形態および第3の実施形態は、車載センサとして実装される形態であり、図2(a)は、転倒検出装置206をASICとし、センサ104を含む一体型のモジュールとして車椅子202に搭載した実施形態であり、図2(b)は、転倒検出装置216をセンサ104を含むモジュールとして電動カート210に搭載した実施形態である。
【0018】
図2(a)に示す実施形態では、車椅子202には、介護が必要な被介護者204が座っており、車椅子202の転倒検出装置206は、センサ104からの加速度データおよび角速度データを取得して転倒検出処理を実行する。転倒検出装置206は、検出対象である車椅子202の加速度および角速度を使用して転倒を検出すると、転倒を通知するための転倒通知信号を、ネットワーク106を介して遠隔的に設置されたデータ処理センタなどに送付する。その他、転倒検出装置206は、シートベルト、エアバッグといったサポート要素を起動することができる。
【0019】
図2(b)に示した実施形態では、電動カート210は、運転者212により運転されていて、電池/モータなどの動力系を利用して歩道などを移動している。転倒検出装置216は、図2(a)で説明した実施形態と同様に、センサ104からの加速度データおよび角速度データを受領して転倒検出処理を実行し、ネットワーク106を介して遠隔的に設置されたデータ処理センタに転倒を通知する。また、電動カート210が転倒した場合、転倒検出装置216は、エアバッグ218やシートベルト214などのサポート要素を起動して、運転者を保護することができる。この他、乗用車などの車両用の車載センサとして実装することができる。
【0020】
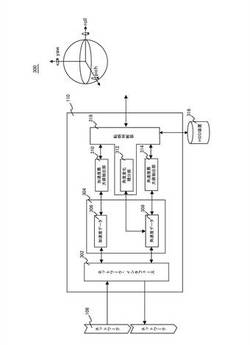
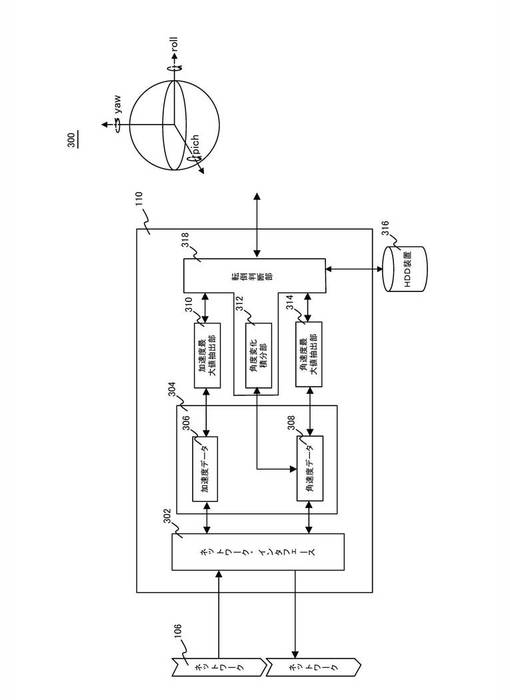
図3は、本実施形態の情報処理装置110の機能ブロック300を示す。なお、図3に示した機能部は、情報処理装置がCPUを動作させてプログラムを実行することにより、情報処理装置を機能ブロック300に示す機能手段として動作させることにより実現されている。図3に示した機能ブロックは、情報処理装置110を図1の実施形態で情報処理装置を使用して実装する場合の実施形態である。情報処理装置110は、ネットワークインタフェース302と、データバッファ304とを含む。ネットワークインタフェース302は、ネットワーク106から送付される加速度データおよび角速度データを受領し、データバッファ304に加速度データおよび角速度データを送付する。データバッファ304には、加速度データ306、角速度データ308が、それぞれのサンプリング時刻に対応付けて格納され、以後の転倒検出処理のために利用される。
【0021】
情報処理装置110は、さらに加速度最大値抽出部310を含んでいる。加速度最大値抽出部310は、データバッファ304に格納された加速度データ306を読み出して、roll軸、pitch軸それぞれの方向に沿った軸方向の並進加速度のうち、絶対値における最大値を抽出する。最大値の抽出は種々のアルゴリズムを使用して行うことができるが、特定のサンプリング時刻に対応するroll軸、pitch軸方向の加速度の最大値(絶対値)をバッファメモリに登録しておき、以後のサンプリング時刻の3軸加速度の値の最大値(絶対値)が先に登録した値よりも大きければバッファメモリ内に登録された値を更新する処理を使用することができる。なお、図3には、本実施形態における座標軸系の定義を示す。
【0022】
また、加速度最大値抽出部310は、説明する実施形態では、roll方向またはpitch方向のいずれかについてバッファメモリ内の値が更新される毎に、進行方向および進行方向に直交する軸、説明している軸ではroll軸およびpitch軸のバッファリングされている加速度を転倒判断部318に送付する。また、現在の最大値を格納するバッファメモリは、定期的に、転倒事象の検出後、またはノイズなどの影響による突発的なスパイク信号を検出した後、リセットされ、常時、適切に転倒を検出できるように維持されている。
【0023】
転倒判断部318では、受け取った鉛直方向に沿った方向(yaw軸)の加速度を除く、2軸方向の絶対値を多変量回帰分析により係数を決定した判別式に代入する。判別式の一般形式を、下記式(1)に示す。
【0024】
【数1】

上記式中、a、b、cは、回帰係数であり、x1は、進行方向(yaw軸)に沿った加速度の絶対値であり、x2は、pitch軸に沿った加速度の絶対値であり、yは、転倒の期待値を示す判別値であって、0(非転倒)〜1(転倒)までの値を取る。回帰は、最小残差を与える周知の手法を使用して行うことができるが、これ以外にもいかなる方法でも用いることができる。なお、yaw軸は、検出対象の通常の進行方向に一致するようにセンサ104を装着することで、一義的に決定することができる。転倒判断部318は、判別式により計算された判別値が、0.5以上の値を有する場合に加速度尺度における転倒と判断する。
【0025】
さらに、情報処理装置110は、角速度最大値抽出部314を含んでおり、角速度最大値抽出部314は、データバッファ304に記録された、特定のサンプリング時刻における3軸回りの角速度セットの値のうち、角速度データ308から絶対値の最大値を抽出し、バッファメモリに格納する。その後、角速度最大値抽出部314は、以後のサンプリング時刻の角速度データセットにおける絶対値の最大値とバッファメモリに登録された値とを比較し、以後の時刻の角速度セットの絶対値の最大値が大きい場合、バッファメモリの値を新たな最大値で更新する。値が更新された場合、更新値を転倒判断部318に送付し、転倒判断部318は、角速度が多変量解析によって決定された角速度しきい値を超えたか否かの判断を行う。
【0026】
また、転倒判断部318は、角度変化積分部312を含んでおり、角度変化積分部312は、転倒判断部318が加速度を尺度として転倒と判断した場合、そのときに処理しているデータの最も大きな角速度を有する軸に関し、サンプリング時刻Tを中心として前後Δtの範囲で角速度を数値積分し、Δtの間の角度変化を計算する。転倒判断部318は、計算された角度変化を、多変量回帰分析により得られたしきい値と比較し、Δt間の角度変化がしきい値以上の場合、角度変化を尺度として転倒を判断する。
【0027】
上述したように、本実施形態では、鉛直方向の加速度変化を使用することなく、鉛直方向の加速度データに代え、鉛直方向に直交する体幹の回転運動を転倒判断の尺度として採用することを可能とする。このため、検出対象が人間のような場合、しゃがんだり、椅子に座るなどの通常行動における鉛直方向の運動などを転倒と誤判断する可能性を最小限とすることができ、測定精度を著しく向上させることができる。
【0028】
なお、情報処理装置110は、角速度データ、加速度データおよび判断値、角速度、角度変化など、転倒を判断するために利用したデータをHDD装置316といった持続性記憶装置に登録しておき、以後の行動ログ解析などに提供することができる。
【0029】
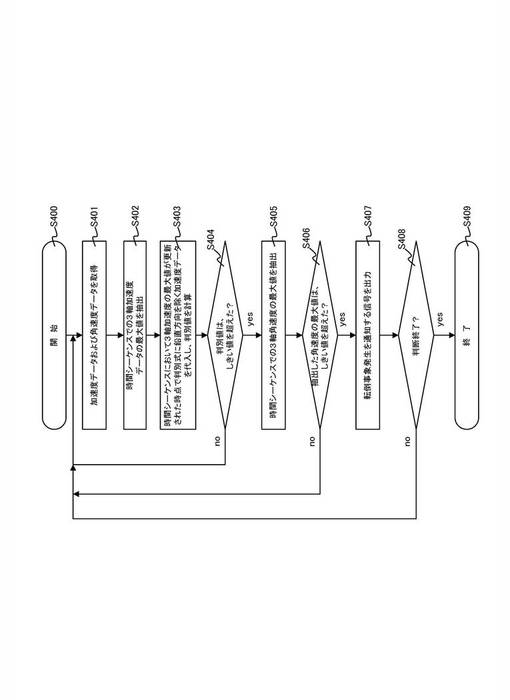
図4は、情報処理装置110が実行する第1の実施形態の転倒検出方法のフローチャートである。図4の処理は、ステップS400から開始し、ステップS401で、加速度データおよび角速度データを取得し、ステップS402で、時間シーケンスでの3軸加速度データにおける絶対最大値を順次抽出し、最大値の更新される毎に転倒判断部318に加速度の絶対最大値を送付する。
【0030】
ステップS403では、時間シーケンスにおいてバッファメモリの値が更新された時点で、判別式に鉛直方向を除く、roll軸、pitch軸に沿った加速度データを取得し、上記式(1)で示した判別式に代入し、判別値を計算する。ステップS404では、判別値を、しきい値(0.5)と比較し、判別値がしきい値を以上の場合(yes)、転倒と判断して処理をステップS405に渡す。一方、ステップS404で、判別値がしきい値以下と判断された場合には、非転倒(no)として処理をステップS401に戻し、時間シーケンス上の後続する加速度データを取得してステップS404までの処理を反復する。
【0031】
ステップS405では、引続き、角速度尺度における転倒判断を行い、データバッファ304から、3軸角速度データを取得し、バッファメモリに格納された過去の最大角速度と比較して、現在判断しているサンプリング時刻での角速度絶対値がバッファリングされた値よりも大きい場合、バッファメモリの値を更新する。ステップS406では、更新された角速度の最大値がしきい値を超えたか否かを判断し、超えた場合(yes)、処理をステップS407に渡す。一方、更新された角速度の最大値を超えないと判断した場合(no)、処理をステップS401に戻し、以後のデータの処理を反復する。
【0032】
ステップS407では、ステップS404およびステップS406の判断がいずれも転倒を示しているので、検出対象の転倒事象を通知する信号を外部に出力し、ステップS408で、判断を終了するべきか否かを判断する。ステップS408で、転倒検出処理の停止指令がなされている場合(yes)、ステップS409で処理を停止し、それ以外の場合(no)、処理をステップS401に戻して測定および処理が終了するまでステップS401〜ステップS408の処理シーケンスを反復する。
【0033】
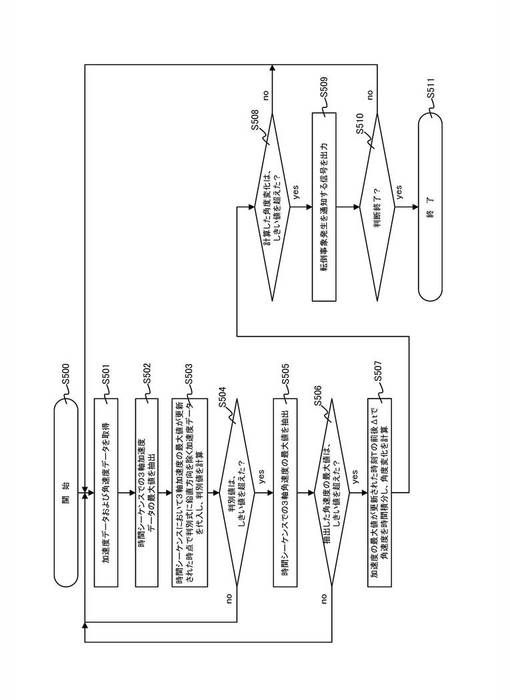
図5は、情報処理装置110が実行する第2の実施形態の転倒検出方法のフローチャートである。第2の実施形態は、加速度尺度、角速度尺度および角度変化尺度の3基準を使用する転倒検出処理である。図5に示した処理は、ステップS501〜ステップS506までは、図4に示した第1の実施形態と同様のシーケンスを利用するため、ステップS506までについては詳細な説明を省略する。
【0034】
ステップS506で抽出した角速度の最大値がしきい値を超えたと判断された場合(yes)、ステップS507に制御が渡され、加速度の最大値が更新されたサンプリング時刻Tを取得し、サンプリング時刻Tの前後Δtにわたり、角速度最大の座標軸回りに変化した角度を、数値積分してΔtの範囲での最大の角度変化を計算する、ステップS508では、計算した角度変化が多変量回帰分析で得られたしきい値を超えたか否かを判断し、角度変化がしきい値を超えた場合(yes)制御をステップS509に渡す。一方、ステップS508の判断で角度変化がしきい値を超えないと判断された場合(no)、処理をステップS501に戻して処理を反復させる。
【0035】
ステップS509では、転倒事象発生を通知する信号を外部出力し、ステップS510で、判断を終了するべきか否かを判断する。ステップS510で、転倒検出処理の停止指令がなされている場合(yes)、ステップS511で処理を停止し、それ以外の場合(no)、処理をステップS501に戻して測定および処理が終了するまでステップS501〜ステップS510の処理シーケンスを反復する。
【0036】
図5に示した第2の実施形態では、Δtにわたる最大の角度変化を転倒判断に追加することにより、検出対象の体幹の角度変化を判断基準に追加することが可能となり、より検出精度を向上させることができる。なお、図4に示した第1の実施形態および図5に示した第2の実施形態のいずれも、鉛直方向での加速度を利用しないため、しゃがむ、座る、など垂直方向の通常動作を誤検出することを最小化し、転倒検出を効率化することができる。さらに、第2の実施形態では、体幹の角度変化を判断基準として追加することができるので、検出対象が単に素早い行動を行ったり、スピン動作を行ったりした場合でも転倒と誤判断する可能性を最小限とし、さらに高精度の転倒検出を行うことが可能となる。
【0037】
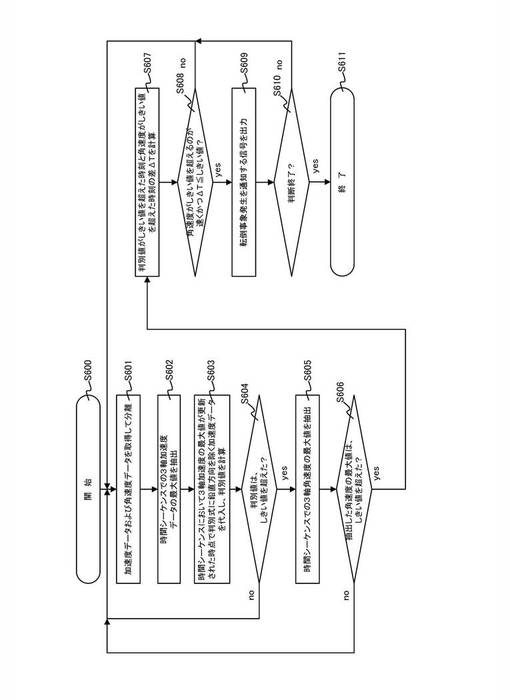
図6は、転倒検出方法の第3の実施形態を示す。第3の実施形態では、加速度尺度での転倒判断および角速度での転倒判断の両方を使用する点では第1の実施形態と同様であるが、角速度尺度での判断を先行して行い、その後加速度尺度での判断を行い、角速度および加速度尺度での判断がなされるまでの時間間隔を使用して転倒判断を行う。第3の実施形態は、本発明者らによる転倒事象の測定実験において、角速度の最大値の時間シーケンスの転倒事象を示すプロファイルが、加速度の最大値の時間シーケンスのプロファイルに遅れないことを見出すことによりなされたものである。
【0038】
一方、同一の転倒事象については、加速度および角速度のピークは時間的に近接して発生する。このため、加速度尺度での転倒事象発生の判断時と、角速度尺度での転倒事象発生の判断時との時間差を使用することでも角速度および加速度の相関性を与え、角速度および加速度を併用する転倒検出の精度を高めることができる。
【0039】
この理由は、種々考えられるが転倒開始した段階では、転倒方向(体幹が移動する方向)に直交する座標軸については、当該座標軸回りの角速度が増加するが、加速度的に見れば転倒方向に沿った加速度の方が大きく変化する。種々の態様で転倒現象が進行すると、転倒方向に向いた加速度が他の軸の加速度よりも大きくなり、この結果、本実施形態では、角速度の時間シーケンスが転倒方向に向いた加速度よりも時間的に先行してピークを形成し、その後に僅かに遅れて転倒方向に関連する加速度が最大値を与えることになるためであると考えることができる。
【0040】
図6の処理は、ステップS600〜ステップS604において、2軸の加速度を使用して転倒判断を行う点で、第1の実施例および第2の実施例と同様なので詳細な説明は省略する。ステップS604で、転倒事象が発生したと判断された場合(yes)、ステップS605で時間シーケンスでの3軸加速度の最大値はしきい値を超えたか否かを判断する。加速度の最大値がしきい値を超えた場合(yes)転倒事象発生として、ステップS607で判別値がしきい値を超えた時刻と角速度がしきい値を超えた時刻の時間差ΔTを計算する。
【0041】
ステップS608で、角速度が同時または早いタイミングで角速度しきい値を超え、かつΔTが時間しきい値以下であるか否かを判定する。ΔTが時間しきい値以下である場合(yes)、ステップS609で転倒事象発生を通知する信号を出力し、ステップS610で、判断を終了するべきか否かを判断する。ステップS610で、転倒検出処理の停止指令がなされている場合(yes)、ステップS611で処理を停止し、それ以外の場合(no)、処理をステップS601に戻して測定および処理が終了するまでステップS601〜ステップS611の処理シーケンスを反復する。なお、人間の歩行を含めさらに広範な転倒事象を対象とするさらに他の実施形態では、単に時間差ΔTが時間しきい値以下であるという判断基準を使用して、転倒判断を行うこともできる。
【0042】
図6で説明した第3の実施形態は、第2の実施形態で角度変化の代わりに角速度と加速度の時間シーケンス上のタイミングを判断尺度として利用するものであり、精度を改善でき、判断のリアルタイム性を改善でき、さらにノイズなどの影響の排除による誤判断を防止できる効果を与える。
【0043】
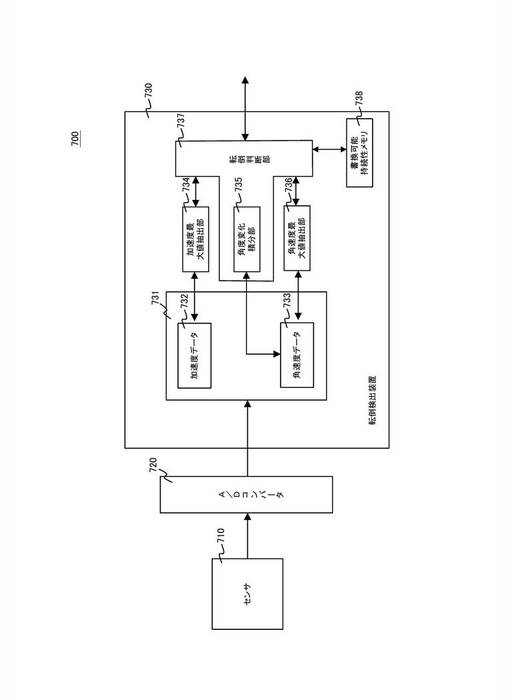
図7は、他の実施形態における転倒検出システム700の実施形態を示す。図7に示した転倒検出システム700は、センサ710と、A/Dコンバータ720と、転倒検出装置730とを含んで構成されている。なお、転倒検出システム700は、一体として構成されたセンサボードとして実装してもよい。センサ710は、座標軸に沿った方向の加速度および座標軸回りの角速度をサンプリング周波数100Hzでサンプリングし、A/Dコンバータ720に送付する。A/Dコンバータ720は、受領した信号をデジタル変換し、加速度データおよび角速度データを、転倒検出装置730に送付する。転倒検出装置730は、ASICなどの半導体装置として構成されており、アセンブラ言語といったプログラム言語の実行により、半導体装置を図7に示した機能手段として実現している。転倒検出装置デジタル変換されたデータをサンプリング時刻に対応付けて受領し、データバッファ731に格納する。
【0044】
データバッファ731は、加速度データおよび角速度データをサンプリング時刻とともに格納し、加速度最大値抽出部734および角速度最大値抽出部736へと角速度データおよび加速度データを送付する。加速度最大値抽出部734および角速度最大値抽出部736は、図3で説明した処理をハードウェア的に実行することを除き、同様の処理を実行するため、詳細な説明は省略する。また、角度変化積分部735は、加速度尺度での転倒事象発生と判断したサンプリング時刻Tの前後Δtの時間にわたり角速度を積分し、転倒事象発生の前後での角度変化を計算して、転倒判断部737に送付する。転倒判断部737は、図3で説明した処理を、ソフトウェア的にではなくハードウェア的に実装することを除き、図3で説明したと同一の処理を実行し、転倒事象を通知する信号を外部装置にバスラインまたはTCPパケットなどとして送付する。
【0045】
図7に示した実施形態の転倒検出システム700は、図2に示した実施形態において好ましく用いることができ、転倒検出装置730が転倒事象発生を通知する信号を受領して、エアバッグやシートベルトとなどのサポート部材を起動するために好適に利用することができる。
【実施例】
【0046】
これまで本発明を実施形態をもって説明してきたが、以下実施例をもってより具体的に本発明を説明する。
【0047】
A.回帰分析−ボランティアの被験者(性別:男性、年齢21−27歳、身長:163cm−183cm、体重:58−80kg)を11人募集し、3軸加速度と3軸角速度を測定可能なウェアラブルセンサ(日立金属(株)製、wireless-T、サンプリング周波数100Hz)を装着した。転倒動作は、4種類(前、横、後ろ方向に静止から倒れる動作、および前方向に躓き倒れる動作)を採用し、非転倒動作として屋内でのADL(:Activities of Daily Living)にて想定される6種類(平地歩行、階段昇降、椅子に座る、布団に横になる、荷物を持ち運ぶ、転倒をこらえる動作)を1被験者あたり、最低5回ずつ測定し、回帰分析用のデータとした。
【0048】
回帰分析によって得られた判別式および各しきい値を下記に示す。
【0049】
【数2】
【0050】
B.転倒検出−ウェアラブルセンサから得られるデータを使用して、ウェアラブルセンサからBluetoothプロトコルで送付されるデータを取得し、パーソナルコンピュータに実装した転倒検出用のプログラムによりデータ解析を行い、回帰分析によって得られたしきい値との比較に基づいて転倒判断を行った。なお、回帰分析の方法については、非特許文献2に詳細を参照されたい。転倒事象判断の実施例として、加速度尺度、角速度尺度、角度変化尺度を併用する方法を用い、角度変化は、加速度尺度で転倒事象と判断されたサンプリング時刻Tを規準とし、サンプリング時刻Tの前後1秒の範囲角速度を積分し、角度変化を計算し回帰分析を行い、転倒判断の正答率をもって実施例とした。
【0051】
C.比較例−比較例として3軸方向の加速度を使用して転倒判断を行う非特許文献2に記載した方法によって転倒判断したことを除き、同一のデータセットについての転倒判断の正答率をもって比較例とした。回帰分析によって得られた判別式および各しきい値を下記に示す。
【0052】
【数3】
【0053】
図8は、本実施形態により取得された加速度データおよび角速度データの時間シーケンスの実施形態を、進行方向に転倒する転倒事象(a)、進行方向に対して横に転倒する転倒現象(b)、および進行方向に対して後ろ向きに倒れる転倒事象(c)として示す。なお、図8では、横軸、縦軸の単位は、図8(a)を代表して示している。図8に示されるように、いずれの場合も非転倒動作の場合に比較して加速度および角速度がピークを形成する時間的領域付近が転倒事象に対応する。図8に示されるように、いずれの転倒事象でも、角速度が比較的早い段階で増大し始め、次いで加速度が増大し始める傾向にあり、その時間差ΔTは、ほぼ同時か約0.5秒以下となっていることが示されている。なお、図8中、転倒事象以外のデータは、歩行中のデータに対応するものである。
【0054】
これらのデータを使用して、転倒事象の判断を行った結果を、図9の表、比較例を図10の表として示す。図10中、通常動作とは、歩行など、非転倒現象についての正答率を意味する。なお、図9および図10に示した結果は、共に被験者11人毎の個性を回帰する目的で、被験者の組み合わせを11通り作成し、11通りの平均値として回帰係数を算出しており、その組み合わせを、「Number of subjects」とし、それぞれ3方向の転倒事象についての正答率および平均値を示す。
【0055】
図9に示されるように、本実施形態では、いずれの場合でも正答率が100%となることが示された。また、図10に示す比較例の結果については、約97%の正答率を与えており、また、転倒事象の方向に依存性があることが示された。この結果、本実施形態では、比較例に比較して、いずれの方向についても正答率が変わらず、高い精度で転倒事象を検出できることが示された。
【0056】
以上、本発明を発明の理解を容易にするために実施形態および実施例を持って説明してきたが、本発明は、説明した実施形態および実施例に限定されることなく、本発明の作用効果を奏する限り、当業者が想到することができる他の実施形態、修正、変更は、本発明の範囲に含まれる。
【0057】
本発明の上記機能は、C、C++、Java(登録商標)、JavaScript(登録商標)、Perl、Rubyなどのオブジェクト指向プログラミング言語や、アセンブラ言語により実装することができ、装置可読な記録媒体に格納して頒布または伝送して頒布することができる。
【符号の説明】
【0058】
100…転倒検出システム
102…検出対象
104…センサ
106…ネットワーク
108…転倒検出装置
110…情報処理装置
200…転倒検出システム
202…車椅子
204…被介護者
206…転倒検出装置
210…電動カート
212…運転者
214…シートベルト
216…転倒検出装置
218…エアバッグ
300…機能ブロック
302…ネットワークインタフェース
304…データバッファ
306…加速度データ
308…角速度データ
310…加速度最大値抽出部
312…角度変化積分部
314…角速度最大値抽出部
316…HDD装置
318…転倒判断部
700…転倒検出システム
710…センサ
720…A/Dコンバータ
730…転倒検出装置
731…データバッファ
732…加速度データ
733…角速度データ
734…加速度最大値抽出部
735…角度変化積分部
736…角速度最大値抽出部
737…転倒判断部
【技術分野】
【0001】
本発明は、検出対象の転倒を検出するためのシステム、装置、方法およびプログラムに関する。
【背景技術】
【0002】
検出対象の転倒を検出する技術は、近年、在宅介護、介護援助用車両などの他、車両用の搭乗者サポート装置において、要介護者の転倒や、車両の転倒・衝突などを検出し、迅速な介護要請を発行したり、エアバッグの起動を行うなどの観点から注目されている。転倒対象が人間である場合、転倒の原因、状態、場所などに対応して複数の転倒態様が想定される。また、検出対象が人間の場合、転倒に際して多くの関節が転倒時に連携して衝撃に備えるための防御行動を行う。検出対象の転倒は、各種センサを使用して、センサ検出値に基づいて転倒の判定を行うことになるが、上述したように、転倒の態様は多種多様なので、いかにして検出対象が転倒したかを判定するかが問題となる。
【0003】
従来から、検出対象の転倒を検出するためのシステムが各種提案されている。例えば、特開2005−237576号公報(特許文献1)では、転倒判定装置が記載されており、開示された装置は、被験者の体幹に取り付けた3軸方向の加速度および角速度を使用し、体幹の鉛直方向の変位量を計算して転倒を判断することにより転倒後判定を減少させている。また、特開2007−151948号公報(特許文献2)では、転倒判定方法および装置が記載されており、被験者の体幹に取り付けた互いに直交する3軸の加速度および角速度を検出し、各軸方向の躍度を計算し、躍度の値から転倒が判断されている。
【0004】
また、特開2009−163538号公報(特許文献3)では、転倒動作パターンが様々な動きを含む場合にも高い精度で転倒を判断するシステムが記載されている。特許文献3に記載されたシステムは、体幹の鉛直方向の変位量に応じた値を出力するセンサと転倒と疑われる事象が発生したか否かを判断し、当該判断により転倒と疑われる事象の発生と判断した時点からの体幹の鉛直方向における変位量を計算し、変位総量から転倒を判断する。さらに、特開2007−260389号公報(特許文献4)では、短時間で転倒を推知でき誤検知が少ない転倒検知装置が記載されている。特許文献4に記載された装置は、体幹の前後方向の軸回りの角速度と傾斜角度とを検出し、転倒の判断を行っている。
【0005】
さらに、ウェアラブルセンサを利用した転倒検出については、M. Kangas et al., “Sensorband fall detector prototype: validation through data collection and analysis revised version”, ISMICT2007, ID1217, December 2007(非特許文献1)において報告されている。また、本発明者らも、Y.Enomoto et al., “Data Processing for Fall Detection using an Acceleration Sensor”, ICCCS2009, A4-02, 2009(非特許文献2)において加速度センサを使用した転倒検出を報告している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−237576号公報
【特許文献2】特開2007−151948号公報
【特許文献3】特開2009−163538号公報
【特許文献4】特開2007−260389号公報
【非特許文献】
【0007】
【非特許文献1】M. Kangas et al., “Sensorband fall detector prototype: validation through data collection and analysis revised version”, ISMICT2007, ID1217, December 2007
【非特許文献2】Y.Enomoto et al., “Data Processing for Fall Detection using an Acceleration Sensor”, ICCCS2009, A4-02, 2009
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、種々の転倒検出のための装置および方法が提案されているものの、多種多様な転倒態様について、転倒検出の確実性を高めることが引き続き必要とされていた。さらに、転倒検出を高精度かつ高速に行うとともに、効率的な転倒予測を可能とすることが必要とされていた。また、介護用車両などに搭載でき、小型で低消費電力の転倒検出装置が必要とされていた。
【課題を解決するための手段】
【0009】
本発明は、上記従来技術に鑑みてなされたものであり、本発明では、3軸加速度と、3軸角速度とを同時計測可能なセンサを使用し、検出対象の転倒に関連するパラメータを取得する。本発明では、3軸加速度および3軸角速度についてそれぞれの絶対最大値を時間的に追跡し、3軸加速度および3軸角速度の時間シーケンスにおけるそれぞれの最大値をサンプリングする。
【0010】
転倒の判断は、時間シーケンス上での最大加速度値を使用して判別値を計算して、判別値が設定された加速度しきい値を超え、かつ角速度の最大値が設定した各角速度しきい値を超えたことに応答して判定される。また、他の実施形態では、転倒と判断された時刻の前後で角速度を数値積分して角度変化を計算し、さらに角度変化について設定された角度変化しきい値を超えたことに応答して転倒を判断する。なお、本発明では、鉛直方向の加速度を判定に使用することなく、転倒検出を高精度に行うことができる。
【0011】
さらに本発明の他の実施形態では、加速度データに基づく転倒判断成立から、角速度の最大値が設定されたしきい値を超えるまでの時間的順序および時間間隔を利用して転倒予測および転倒判断を行うことができる。
【発明の効果】
【0012】
本発明によれば、転倒検出を高精度かつ高速に行うとともに、効率的な転倒予測を可能とし、介護用車両などに搭載でき、車載型として実装した場合に小型で低消費電力化が可能な転倒検出システム、転倒検出装置、転倒検出方法およびプログラムが提供できる。
【図面の簡単な説明】
【0013】
【図1】本実施形態の転倒検出システム100の第1の実施形態を示した図。
【図2】本実施形態の転倒検出システム200の第2および第3の実施形態を示した図。
【図3】本実施形態の情報処理装置110の機能ブロック300を示した図。
【図4】情報処理装置110が実行する第1の実施形態の転倒検出方法のフローチャート。
【図5】情報処理装置110が実行する第2の実施形態の転倒検出方法のフローチャート。
【図6】転倒検出方法の第3の実施形態のフローチャート。
【図7】本実施形態の他の実施形態における転倒検出システム700の実施形態を示した図。
【図8】本実施形態により取得された加速度データおよび角速度データの時間シーケンスの実施形態を、進行方向に転倒する転倒事象(a)、進行方向に対して横に転倒する転倒現象(b)、および進行方向に対して後ろ向きに倒れる転倒事象(c)として示した図。
【図9】転倒事象の判断を行った実施例の結果を示した表。
【図10】転倒事象の判断を行った比較例の結果を示した表。
【発明を実施するための形態】
【0014】
以下、本発明を実施形態をもって説明するが、本発明は、後述する実施形態に限定されるものではない。図1は、本実施形態の転倒検出システム100の第1の実施形態を示す。図1に示した転倒検出システム100は、検出対象102に装着または取り付けられたセンサ104を含んでいる。センサ104は、3軸回りの角速度の他、3軸回りの軸方向に沿った加速度を測定することが可能であり、センサ104が取得した加速度データおよび角速度データは、IEEE802.xやBlueTooth(登録商標)といったワイヤレスネットワークおよびインターネットなどのネットワーク106を介して転倒検出装置108に送付することができる。
【0015】
転倒検出装置108は、図1に示した実施形態では、パーソナルコンピュータ、ワークステーションまたはサーバなどの情報処理装置110として実装されている。情報処理装置110には、ディスプレイ装置、キーボード、およびマウスといった入出力装置が接続されていて、情報処理装置110に対して各種の処理を指令し、また情報処理装置の処理結果を外部出力可能としている。
【0016】
情報処理装置110は、PENTIUM(登録商標)、Celeron(登録商標)、Xeon(登録商標)、CORE 2 DUO(登録商標)、PENTIUM(登録商標)互換チップなど、CISCアーキテクチャのマイクロプロセッサ、または、POWERPC(登録商標)などのRISCアーキテクチャのマイクロプロセッサを、シングルコアまたはマルチコアの形態で実装することができる。また、情報処理装置110は、WINDOWS(登録商標)2000、WINDOWS(登録商標)XP、WINDOWS 7(登録商標)、UNIX(登録商標)、LINUX(登録商標)などのオペレーティングシステムにより制御されていて、C、C++、JAVA(登録商標)、JAVASCRIPT(登録商標)、PERL、RUBYなどのプログラミング言語を使用して実装されるプログラムを実行し、転倒検出のための処理を実行する。
【0017】
図2は、本実施形態の転倒検出システム200の第2および第3の実施形態を示す。第2の実施形態および第3の実施形態は、車載センサとして実装される形態であり、図2(a)は、転倒検出装置206をASICとし、センサ104を含む一体型のモジュールとして車椅子202に搭載した実施形態であり、図2(b)は、転倒検出装置216をセンサ104を含むモジュールとして電動カート210に搭載した実施形態である。
【0018】
図2(a)に示す実施形態では、車椅子202には、介護が必要な被介護者204が座っており、車椅子202の転倒検出装置206は、センサ104からの加速度データおよび角速度データを取得して転倒検出処理を実行する。転倒検出装置206は、検出対象である車椅子202の加速度および角速度を使用して転倒を検出すると、転倒を通知するための転倒通知信号を、ネットワーク106を介して遠隔的に設置されたデータ処理センタなどに送付する。その他、転倒検出装置206は、シートベルト、エアバッグといったサポート要素を起動することができる。
【0019】
図2(b)に示した実施形態では、電動カート210は、運転者212により運転されていて、電池/モータなどの動力系を利用して歩道などを移動している。転倒検出装置216は、図2(a)で説明した実施形態と同様に、センサ104からの加速度データおよび角速度データを受領して転倒検出処理を実行し、ネットワーク106を介して遠隔的に設置されたデータ処理センタに転倒を通知する。また、電動カート210が転倒した場合、転倒検出装置216は、エアバッグ218やシートベルト214などのサポート要素を起動して、運転者を保護することができる。この他、乗用車などの車両用の車載センサとして実装することができる。
【0020】
図3は、本実施形態の情報処理装置110の機能ブロック300を示す。なお、図3に示した機能部は、情報処理装置がCPUを動作させてプログラムを実行することにより、情報処理装置を機能ブロック300に示す機能手段として動作させることにより実現されている。図3に示した機能ブロックは、情報処理装置110を図1の実施形態で情報処理装置を使用して実装する場合の実施形態である。情報処理装置110は、ネットワークインタフェース302と、データバッファ304とを含む。ネットワークインタフェース302は、ネットワーク106から送付される加速度データおよび角速度データを受領し、データバッファ304に加速度データおよび角速度データを送付する。データバッファ304には、加速度データ306、角速度データ308が、それぞれのサンプリング時刻に対応付けて格納され、以後の転倒検出処理のために利用される。
【0021】
情報処理装置110は、さらに加速度最大値抽出部310を含んでいる。加速度最大値抽出部310は、データバッファ304に格納された加速度データ306を読み出して、roll軸、pitch軸それぞれの方向に沿った軸方向の並進加速度のうち、絶対値における最大値を抽出する。最大値の抽出は種々のアルゴリズムを使用して行うことができるが、特定のサンプリング時刻に対応するroll軸、pitch軸方向の加速度の最大値(絶対値)をバッファメモリに登録しておき、以後のサンプリング時刻の3軸加速度の値の最大値(絶対値)が先に登録した値よりも大きければバッファメモリ内に登録された値を更新する処理を使用することができる。なお、図3には、本実施形態における座標軸系の定義を示す。
【0022】
また、加速度最大値抽出部310は、説明する実施形態では、roll方向またはpitch方向のいずれかについてバッファメモリ内の値が更新される毎に、進行方向および進行方向に直交する軸、説明している軸ではroll軸およびpitch軸のバッファリングされている加速度を転倒判断部318に送付する。また、現在の最大値を格納するバッファメモリは、定期的に、転倒事象の検出後、またはノイズなどの影響による突発的なスパイク信号を検出した後、リセットされ、常時、適切に転倒を検出できるように維持されている。
【0023】
転倒判断部318では、受け取った鉛直方向に沿った方向(yaw軸)の加速度を除く、2軸方向の絶対値を多変量回帰分析により係数を決定した判別式に代入する。判別式の一般形式を、下記式(1)に示す。
【0024】
【数1】
上記式中、a、b、cは、回帰係数であり、x1は、進行方向(yaw軸)に沿った加速度の絶対値であり、x2は、pitch軸に沿った加速度の絶対値であり、yは、転倒の期待値を示す判別値であって、0(非転倒)〜1(転倒)までの値を取る。回帰は、最小残差を与える周知の手法を使用して行うことができるが、これ以外にもいかなる方法でも用いることができる。なお、yaw軸は、検出対象の通常の進行方向に一致するようにセンサ104を装着することで、一義的に決定することができる。転倒判断部318は、判別式により計算された判別値が、0.5以上の値を有する場合に加速度尺度における転倒と判断する。
【0025】
さらに、情報処理装置110は、角速度最大値抽出部314を含んでおり、角速度最大値抽出部314は、データバッファ304に記録された、特定のサンプリング時刻における3軸回りの角速度セットの値のうち、角速度データ308から絶対値の最大値を抽出し、バッファメモリに格納する。その後、角速度最大値抽出部314は、以後のサンプリング時刻の角速度データセットにおける絶対値の最大値とバッファメモリに登録された値とを比較し、以後の時刻の角速度セットの絶対値の最大値が大きい場合、バッファメモリの値を新たな最大値で更新する。値が更新された場合、更新値を転倒判断部318に送付し、転倒判断部318は、角速度が多変量解析によって決定された角速度しきい値を超えたか否かの判断を行う。
【0026】
また、転倒判断部318は、角度変化積分部312を含んでおり、角度変化積分部312は、転倒判断部318が加速度を尺度として転倒と判断した場合、そのときに処理しているデータの最も大きな角速度を有する軸に関し、サンプリング時刻Tを中心として前後Δtの範囲で角速度を数値積分し、Δtの間の角度変化を計算する。転倒判断部318は、計算された角度変化を、多変量回帰分析により得られたしきい値と比較し、Δt間の角度変化がしきい値以上の場合、角度変化を尺度として転倒を判断する。
【0027】
上述したように、本実施形態では、鉛直方向の加速度変化を使用することなく、鉛直方向の加速度データに代え、鉛直方向に直交する体幹の回転運動を転倒判断の尺度として採用することを可能とする。このため、検出対象が人間のような場合、しゃがんだり、椅子に座るなどの通常行動における鉛直方向の運動などを転倒と誤判断する可能性を最小限とすることができ、測定精度を著しく向上させることができる。
【0028】
なお、情報処理装置110は、角速度データ、加速度データおよび判断値、角速度、角度変化など、転倒を判断するために利用したデータをHDD装置316といった持続性記憶装置に登録しておき、以後の行動ログ解析などに提供することができる。
【0029】
図4は、情報処理装置110が実行する第1の実施形態の転倒検出方法のフローチャートである。図4の処理は、ステップS400から開始し、ステップS401で、加速度データおよび角速度データを取得し、ステップS402で、時間シーケンスでの3軸加速度データにおける絶対最大値を順次抽出し、最大値の更新される毎に転倒判断部318に加速度の絶対最大値を送付する。
【0030】
ステップS403では、時間シーケンスにおいてバッファメモリの値が更新された時点で、判別式に鉛直方向を除く、roll軸、pitch軸に沿った加速度データを取得し、上記式(1)で示した判別式に代入し、判別値を計算する。ステップS404では、判別値を、しきい値(0.5)と比較し、判別値がしきい値を以上の場合(yes)、転倒と判断して処理をステップS405に渡す。一方、ステップS404で、判別値がしきい値以下と判断された場合には、非転倒(no)として処理をステップS401に戻し、時間シーケンス上の後続する加速度データを取得してステップS404までの処理を反復する。
【0031】
ステップS405では、引続き、角速度尺度における転倒判断を行い、データバッファ304から、3軸角速度データを取得し、バッファメモリに格納された過去の最大角速度と比較して、現在判断しているサンプリング時刻での角速度絶対値がバッファリングされた値よりも大きい場合、バッファメモリの値を更新する。ステップS406では、更新された角速度の最大値がしきい値を超えたか否かを判断し、超えた場合(yes)、処理をステップS407に渡す。一方、更新された角速度の最大値を超えないと判断した場合(no)、処理をステップS401に戻し、以後のデータの処理を反復する。
【0032】
ステップS407では、ステップS404およびステップS406の判断がいずれも転倒を示しているので、検出対象の転倒事象を通知する信号を外部に出力し、ステップS408で、判断を終了するべきか否かを判断する。ステップS408で、転倒検出処理の停止指令がなされている場合(yes)、ステップS409で処理を停止し、それ以外の場合(no)、処理をステップS401に戻して測定および処理が終了するまでステップS401〜ステップS408の処理シーケンスを反復する。
【0033】
図5は、情報処理装置110が実行する第2の実施形態の転倒検出方法のフローチャートである。第2の実施形態は、加速度尺度、角速度尺度および角度変化尺度の3基準を使用する転倒検出処理である。図5に示した処理は、ステップS501〜ステップS506までは、図4に示した第1の実施形態と同様のシーケンスを利用するため、ステップS506までについては詳細な説明を省略する。
【0034】
ステップS506で抽出した角速度の最大値がしきい値を超えたと判断された場合(yes)、ステップS507に制御が渡され、加速度の最大値が更新されたサンプリング時刻Tを取得し、サンプリング時刻Tの前後Δtにわたり、角速度最大の座標軸回りに変化した角度を、数値積分してΔtの範囲での最大の角度変化を計算する、ステップS508では、計算した角度変化が多変量回帰分析で得られたしきい値を超えたか否かを判断し、角度変化がしきい値を超えた場合(yes)制御をステップS509に渡す。一方、ステップS508の判断で角度変化がしきい値を超えないと判断された場合(no)、処理をステップS501に戻して処理を反復させる。
【0035】
ステップS509では、転倒事象発生を通知する信号を外部出力し、ステップS510で、判断を終了するべきか否かを判断する。ステップS510で、転倒検出処理の停止指令がなされている場合(yes)、ステップS511で処理を停止し、それ以外の場合(no)、処理をステップS501に戻して測定および処理が終了するまでステップS501〜ステップS510の処理シーケンスを反復する。
【0036】
図5に示した第2の実施形態では、Δtにわたる最大の角度変化を転倒判断に追加することにより、検出対象の体幹の角度変化を判断基準に追加することが可能となり、より検出精度を向上させることができる。なお、図4に示した第1の実施形態および図5に示した第2の実施形態のいずれも、鉛直方向での加速度を利用しないため、しゃがむ、座る、など垂直方向の通常動作を誤検出することを最小化し、転倒検出を効率化することができる。さらに、第2の実施形態では、体幹の角度変化を判断基準として追加することができるので、検出対象が単に素早い行動を行ったり、スピン動作を行ったりした場合でも転倒と誤判断する可能性を最小限とし、さらに高精度の転倒検出を行うことが可能となる。
【0037】
図6は、転倒検出方法の第3の実施形態を示す。第3の実施形態では、加速度尺度での転倒判断および角速度での転倒判断の両方を使用する点では第1の実施形態と同様であるが、角速度尺度での判断を先行して行い、その後加速度尺度での判断を行い、角速度および加速度尺度での判断がなされるまでの時間間隔を使用して転倒判断を行う。第3の実施形態は、本発明者らによる転倒事象の測定実験において、角速度の最大値の時間シーケンスの転倒事象を示すプロファイルが、加速度の最大値の時間シーケンスのプロファイルに遅れないことを見出すことによりなされたものである。
【0038】
一方、同一の転倒事象については、加速度および角速度のピークは時間的に近接して発生する。このため、加速度尺度での転倒事象発生の判断時と、角速度尺度での転倒事象発生の判断時との時間差を使用することでも角速度および加速度の相関性を与え、角速度および加速度を併用する転倒検出の精度を高めることができる。
【0039】
この理由は、種々考えられるが転倒開始した段階では、転倒方向(体幹が移動する方向)に直交する座標軸については、当該座標軸回りの角速度が増加するが、加速度的に見れば転倒方向に沿った加速度の方が大きく変化する。種々の態様で転倒現象が進行すると、転倒方向に向いた加速度が他の軸の加速度よりも大きくなり、この結果、本実施形態では、角速度の時間シーケンスが転倒方向に向いた加速度よりも時間的に先行してピークを形成し、その後に僅かに遅れて転倒方向に関連する加速度が最大値を与えることになるためであると考えることができる。
【0040】
図6の処理は、ステップS600〜ステップS604において、2軸の加速度を使用して転倒判断を行う点で、第1の実施例および第2の実施例と同様なので詳細な説明は省略する。ステップS604で、転倒事象が発生したと判断された場合(yes)、ステップS605で時間シーケンスでの3軸加速度の最大値はしきい値を超えたか否かを判断する。加速度の最大値がしきい値を超えた場合(yes)転倒事象発生として、ステップS607で判別値がしきい値を超えた時刻と角速度がしきい値を超えた時刻の時間差ΔTを計算する。
【0041】
ステップS608で、角速度が同時または早いタイミングで角速度しきい値を超え、かつΔTが時間しきい値以下であるか否かを判定する。ΔTが時間しきい値以下である場合(yes)、ステップS609で転倒事象発生を通知する信号を出力し、ステップS610で、判断を終了するべきか否かを判断する。ステップS610で、転倒検出処理の停止指令がなされている場合(yes)、ステップS611で処理を停止し、それ以外の場合(no)、処理をステップS601に戻して測定および処理が終了するまでステップS601〜ステップS611の処理シーケンスを反復する。なお、人間の歩行を含めさらに広範な転倒事象を対象とするさらに他の実施形態では、単に時間差ΔTが時間しきい値以下であるという判断基準を使用して、転倒判断を行うこともできる。
【0042】
図6で説明した第3の実施形態は、第2の実施形態で角度変化の代わりに角速度と加速度の時間シーケンス上のタイミングを判断尺度として利用するものであり、精度を改善でき、判断のリアルタイム性を改善でき、さらにノイズなどの影響の排除による誤判断を防止できる効果を与える。
【0043】
図7は、他の実施形態における転倒検出システム700の実施形態を示す。図7に示した転倒検出システム700は、センサ710と、A/Dコンバータ720と、転倒検出装置730とを含んで構成されている。なお、転倒検出システム700は、一体として構成されたセンサボードとして実装してもよい。センサ710は、座標軸に沿った方向の加速度および座標軸回りの角速度をサンプリング周波数100Hzでサンプリングし、A/Dコンバータ720に送付する。A/Dコンバータ720は、受領した信号をデジタル変換し、加速度データおよび角速度データを、転倒検出装置730に送付する。転倒検出装置730は、ASICなどの半導体装置として構成されており、アセンブラ言語といったプログラム言語の実行により、半導体装置を図7に示した機能手段として実現している。転倒検出装置デジタル変換されたデータをサンプリング時刻に対応付けて受領し、データバッファ731に格納する。
【0044】
データバッファ731は、加速度データおよび角速度データをサンプリング時刻とともに格納し、加速度最大値抽出部734および角速度最大値抽出部736へと角速度データおよび加速度データを送付する。加速度最大値抽出部734および角速度最大値抽出部736は、図3で説明した処理をハードウェア的に実行することを除き、同様の処理を実行するため、詳細な説明は省略する。また、角度変化積分部735は、加速度尺度での転倒事象発生と判断したサンプリング時刻Tの前後Δtの時間にわたり角速度を積分し、転倒事象発生の前後での角度変化を計算して、転倒判断部737に送付する。転倒判断部737は、図3で説明した処理を、ソフトウェア的にではなくハードウェア的に実装することを除き、図3で説明したと同一の処理を実行し、転倒事象を通知する信号を外部装置にバスラインまたはTCPパケットなどとして送付する。
【0045】
図7に示した実施形態の転倒検出システム700は、図2に示した実施形態において好ましく用いることができ、転倒検出装置730が転倒事象発生を通知する信号を受領して、エアバッグやシートベルトとなどのサポート部材を起動するために好適に利用することができる。
【実施例】
【0046】
これまで本発明を実施形態をもって説明してきたが、以下実施例をもってより具体的に本発明を説明する。
【0047】
A.回帰分析−ボランティアの被験者(性別:男性、年齢21−27歳、身長:163cm−183cm、体重:58−80kg)を11人募集し、3軸加速度と3軸角速度を測定可能なウェアラブルセンサ(日立金属(株)製、wireless-T、サンプリング周波数100Hz)を装着した。転倒動作は、4種類(前、横、後ろ方向に静止から倒れる動作、および前方向に躓き倒れる動作)を採用し、非転倒動作として屋内でのADL(:Activities of Daily Living)にて想定される6種類(平地歩行、階段昇降、椅子に座る、布団に横になる、荷物を持ち運ぶ、転倒をこらえる動作)を1被験者あたり、最低5回ずつ測定し、回帰分析用のデータとした。
【0048】
回帰分析によって得られた判別式および各しきい値を下記に示す。
【0049】
【数2】
【0050】
B.転倒検出−ウェアラブルセンサから得られるデータを使用して、ウェアラブルセンサからBluetoothプロトコルで送付されるデータを取得し、パーソナルコンピュータに実装した転倒検出用のプログラムによりデータ解析を行い、回帰分析によって得られたしきい値との比較に基づいて転倒判断を行った。なお、回帰分析の方法については、非特許文献2に詳細を参照されたい。転倒事象判断の実施例として、加速度尺度、角速度尺度、角度変化尺度を併用する方法を用い、角度変化は、加速度尺度で転倒事象と判断されたサンプリング時刻Tを規準とし、サンプリング時刻Tの前後1秒の範囲角速度を積分し、角度変化を計算し回帰分析を行い、転倒判断の正答率をもって実施例とした。
【0051】
C.比較例−比較例として3軸方向の加速度を使用して転倒判断を行う非特許文献2に記載した方法によって転倒判断したことを除き、同一のデータセットについての転倒判断の正答率をもって比較例とした。回帰分析によって得られた判別式および各しきい値を下記に示す。
【0052】
【数3】
【0053】
図8は、本実施形態により取得された加速度データおよび角速度データの時間シーケンスの実施形態を、進行方向に転倒する転倒事象(a)、進行方向に対して横に転倒する転倒現象(b)、および進行方向に対して後ろ向きに倒れる転倒事象(c)として示す。なお、図8では、横軸、縦軸の単位は、図8(a)を代表して示している。図8に示されるように、いずれの場合も非転倒動作の場合に比較して加速度および角速度がピークを形成する時間的領域付近が転倒事象に対応する。図8に示されるように、いずれの転倒事象でも、角速度が比較的早い段階で増大し始め、次いで加速度が増大し始める傾向にあり、その時間差ΔTは、ほぼ同時か約0.5秒以下となっていることが示されている。なお、図8中、転倒事象以外のデータは、歩行中のデータに対応するものである。
【0054】
これらのデータを使用して、転倒事象の判断を行った結果を、図9の表、比較例を図10の表として示す。図10中、通常動作とは、歩行など、非転倒現象についての正答率を意味する。なお、図9および図10に示した結果は、共に被験者11人毎の個性を回帰する目的で、被験者の組み合わせを11通り作成し、11通りの平均値として回帰係数を算出しており、その組み合わせを、「Number of subjects」とし、それぞれ3方向の転倒事象についての正答率および平均値を示す。
【0055】
図9に示されるように、本実施形態では、いずれの場合でも正答率が100%となることが示された。また、図10に示す比較例の結果については、約97%の正答率を与えており、また、転倒事象の方向に依存性があることが示された。この結果、本実施形態では、比較例に比較して、いずれの方向についても正答率が変わらず、高い精度で転倒事象を検出できることが示された。
【0056】
以上、本発明を発明の理解を容易にするために実施形態および実施例を持って説明してきたが、本発明は、説明した実施形態および実施例に限定されることなく、本発明の作用効果を奏する限り、当業者が想到することができる他の実施形態、修正、変更は、本発明の範囲に含まれる。
【0057】
本発明の上記機能は、C、C++、Java(登録商標)、JavaScript(登録商標)、Perl、Rubyなどのオブジェクト指向プログラミング言語や、アセンブラ言語により実装することができ、装置可読な記録媒体に格納して頒布または伝送して頒布することができる。
【符号の説明】
【0058】
100…転倒検出システム
102…検出対象
104…センサ
106…ネットワーク
108…転倒検出装置
110…情報処理装置
200…転倒検出システム
202…車椅子
204…被介護者
206…転倒検出装置
210…電動カート
212…運転者
214…シートベルト
216…転倒検出装置
218…エアバッグ
300…機能ブロック
302…ネットワークインタフェース
304…データバッファ
306…加速度データ
308…角速度データ
310…加速度最大値抽出部
312…角度変化積分部
314…角速度最大値抽出部
316…HDD装置
318…転倒判断部
700…転倒検出システム
710…センサ
720…A/Dコンバータ
730…転倒検出装置
731…データバッファ
732…加速度データ
733…角速度データ
734…加速度最大値抽出部
735…角度変化積分部
736…角速度最大値抽出部
737…転倒判断部
【特許請求の範囲】
【請求項1】
検出対象の転倒を検出する転倒検出システムであって、前記転倒検出システムは、
前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するセンサと、
前記センサからの並進加速度データおよび角速度データを受取る転倒検出装置とを含み、
前記転倒検出装置は、
前記並進加速度データおよび前記角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出手段と、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出手段と、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことを判断する転倒判断手段と
を含む転倒検出システム。
【請求項2】
さらに、前記転倒判断手段は、前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分することにより、運動速度が最大の軸回りにおける角度変化を計算し、前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断する、請求項1に記載の転倒検出システム。
【請求項3】
さらに、前記転倒判断手段は、前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算し、少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断する、請求項1に記載の転倒検出システム。
【請求項4】
前記センサは、ウェアラブルセンサまたは車載センサである、請求項1〜3のいずれか1項に記載の転倒検出システム。
【請求項5】
検出対象の転倒を検出する転倒検出装置であって、
前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するセンサからの並進加速度データおよび角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出手段と、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出手段と、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことを判断する転倒判断手段と
を含む転倒検出装置。
【請求項6】
さらに、前記転倒判断手段は、前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分することにより、運動速度が最大の軸回りにおける角度変化を計算し、前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断する、請求項5に記載の転倒検出装置。
【請求項7】
さらに、前記転倒判断手段は、前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算し、少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断する、請求項5に記載の転倒検出装置。
【請求項8】
前記センサは、ウェアラブルセンサまたは車載センサであり、前記転倒検出装置は、前記センサからのデータをワイヤレス通信により受信する情報処理装置または前記センサと共に前記検出対象に装着されるモジュールである、請求項5〜7のいずれか1項に記載の転倒検出装置。
【請求項9】
検出対象の転倒を検出する転倒検出方法であって、前記転倒検出方法は、
センサにより前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するステップと、
転倒検出装置が前記センサからの並進加速度データおよび角速度データを受取るステップと、
前記並進加速度データおよび前記角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新するステップと、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新するステップと、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことをと判断するステップと
を含む転倒検出方法。
【請求項10】
さらに、
前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分するステップと、
前記角速度が最大の軸回りにおける角度変化を計算するステップと、
前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断するステップと
を含む、請求項9に記載の転倒検出方法。
【請求項11】
さらに、
前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算するステップと、
少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断するステップと
を含む請求項9に記載の転倒検出方法。
【請求項12】
請求項9〜請求項11のいずれか1項に記載の転倒検出方法を装置が実行するためのコンピュータ実行可能なプログラム。
【請求項1】
検出対象の転倒を検出する転倒検出システムであって、前記転倒検出システムは、
前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するセンサと、
前記センサからの並進加速度データおよび角速度データを受取る転倒検出装置とを含み、
前記転倒検出装置は、
前記並進加速度データおよび前記角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出手段と、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出手段と、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことを判断する転倒判断手段と
を含む転倒検出システム。
【請求項2】
さらに、前記転倒判断手段は、前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分することにより、運動速度が最大の軸回りにおける角度変化を計算し、前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断する、請求項1に記載の転倒検出システム。
【請求項3】
さらに、前記転倒判断手段は、前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算し、少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断する、請求項1に記載の転倒検出システム。
【請求項4】
前記センサは、ウェアラブルセンサまたは車載センサである、請求項1〜3のいずれか1項に記載の転倒検出システム。
【請求項5】
検出対象の転倒を検出する転倒検出装置であって、
前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するセンサからの並進加速度データおよび角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新する加速度最大値抽出手段と、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新する角速度最大値抽出手段と、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことを判断する転倒判断手段と
を含む転倒検出装置。
【請求項6】
さらに、前記転倒判断手段は、前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分することにより、運動速度が最大の軸回りにおける角度変化を計算し、前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断する、請求項5に記載の転倒検出装置。
【請求項7】
さらに、前記転倒判断手段は、前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算し、少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断する、請求項5に記載の転倒検出装置。
【請求項8】
前記センサは、ウェアラブルセンサまたは車載センサであり、前記転倒検出装置は、前記センサからのデータをワイヤレス通信により受信する情報処理装置または前記センサと共に前記検出対象に装着されるモジュールである、請求項5〜7のいずれか1項に記載の転倒検出装置。
【請求項9】
検出対象の転倒を検出する転倒検出方法であって、前記転倒検出方法は、
センサにより前記検出対象に装着され、前記検出対象の姿勢に関して3軸方向の並進加速度および3軸回りの角速度を検出するステップと、
転倒検出装置が前記センサからの並進加速度データおよび角速度データを受取るステップと、
前記並進加速度データおよび前記角速度データを受け取ってサンプリング時刻における各軸についての前記並進加速度データの絶対値が最大の並進加速度データを抽出して並進加速度の絶対最大値を更新するステップと、
前記角速度データから絶対最大値角速度データを抽出してサンプリング時刻における角速度の絶対値が最大の角速度データを抽出して角速度の絶対最大値を更新するステップと、
前記抽出した並進加速度データおよび角速度データの絶対最大値の両方が加速度しきい値および角速度しきい値を超えた場合に、前記検出対象が転倒したことをと判断するステップと
を含む転倒検出方法。
【請求項10】
さらに、
前記加速度データが前記加速度しきい値を超えた時刻を基準とした前後にわたり角速度データを時間積分するステップと、
前記角速度が最大の軸回りにおける角度変化を計算するステップと、
前記角度変化が前記角度変化について設定された角度変化しきい値を超えたことにより前記検出対象の転倒を判断するステップと
を含む、請求項9に記載の転倒検出方法。
【請求項11】
さらに、
前記加速度データおよび前記角速度データが前記しきい値を超え、かつ前記加速度データが前記加速度しきい値を超えた時刻と前記角速度データが前記角速度データを超えた時刻との時間差を計算するステップと、
少なくとも当該時間差が設定した時間しきい値以下である場合に、前記検出対象の転倒を判断するステップと
を含む請求項9に記載の転倒検出方法。
【請求項12】
請求項9〜請求項11のいずれか1項に記載の転倒検出方法を装置が実行するためのコンピュータ実行可能なプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−177234(P2011−177234A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−42454(P2010−42454)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(800000080)タマティーエルオー株式会社 (255)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(800000080)タマティーエルオー株式会社 (255)
【Fターム(参考)】
[ Back to top ]