
転舵制御方法、転舵制御装置および船舶
【課題】電動ステアリング機構の船舶において、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与えないようにする。
【解決手段】現在のハンドル回転角を検知し(ステップS11)、このハンドル回転角から制御周期1つ前のハンドル回転角を減じてハンドル回転角変化量Δθhを算出する(ステップS12)。次に、舵角比Kを設定し(ステップS13)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*を算出する(ステップS14)。最後に、目標舵角変化量Δθs*を制御周期1つ前の目標舵角θs*-1に足して今回の目標舵角θs*を算出する(ステップS15)。そして、目標舵角θs*に基づいてステアリングを転舵させる(ステップS16、S17)。
【解決手段】現在のハンドル回転角を検知し(ステップS11)、このハンドル回転角から制御周期1つ前のハンドル回転角を減じてハンドル回転角変化量Δθhを算出する(ステップS12)。次に、舵角比Kを設定し(ステップS13)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*を算出する(ステップS14)。最後に、目標舵角変化量Δθs*を制御周期1つ前の目標舵角θs*-1に足して今回の目標舵角θs*を算出する(ステップS15)。そして、目標舵角θs*に基づいてステアリングを転舵させる(ステップS16、S17)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動ステアリング機構(ステア・バイ・ワイヤ方式のステアリング機構)を備えた船舶に適用するに好適な転舵制御方法、転舵制御装置および船舶に関するものである。
【背景技術】
【0002】
図7乃至図9には、従来の転舵制御方法を示す。
【0003】
従来、電動ステアリング機構を備えた船舶においては、ハンドルと船外機本体などのステアリング(舵)とが電気的に接続されており、図7に示すように、ハンドル回転角(絶対角)に応じてステアリングの目標舵角を設定する転舵制御が行われていた(例えば、特許文献1参照)。
【0004】
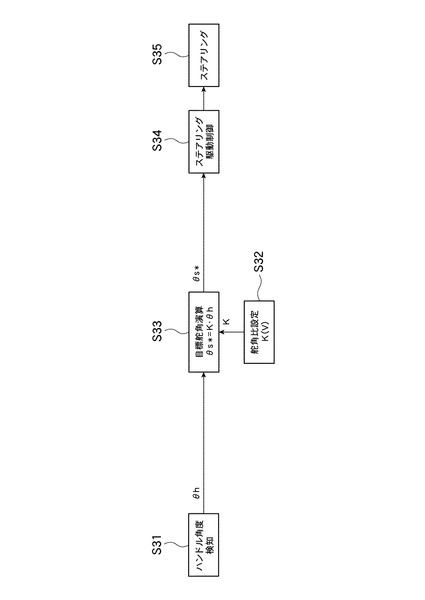
すなわち、ハンドル回転角センサの検出信号に基づいてハンドル回転角θhが演算されるとともに(ステップS31)、船速に対応した舵角比Kが設定され(ステップS32)、ハンドル回転角θhに舵角比Kが乗じられて目標舵角θs*(=K・θh)が算出される(ステップS33)。そして、この目標舵角θs*に基づく転舵動作が指令され(ステップS34)、実舵角θsが目標舵角θs*に一致するようにステアリングが転舵する(ステップS35)。
【0005】
ここで、舵角比Kは、ハンドル回転角θhに対する目標舵角θs*の比率を表し、船速に依存する定数である。例えば、舵角比Kが1/24である場合は、ハンドルを1回転(360°回転)させると、ステアリングが15°切れることになる。
【特許文献1】特許第2959044号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、このような転舵制御では、目標舵角θs*がハンドル回転角θhに基づいて設定されることから、次のような不都合があった。
【0007】
第1に、電動ステアリング機構を備えているため、電源がオフになっている状態(例えば、水上または陸上での保管時など)では、ステアリングに関係なくハンドルだけ独立して回転位置を動かすことが可能であり、逆に、ハンドルに関係なくステアリングだけ独立して転舵位置を動かすことも可能である。これらの場合、ハンドル回転角θh、ひいては目標舵角θs*に対して実舵角θsがずれた状態となるため、船舶の起動時において電源がオンされた途端に、ハンドルやステアリングが不意に所定の位置(ハンドル回転角θhと実舵角θsとが対応する位置)まで動いて操船者に違和感を与える事態が生じてしまう。
【0008】
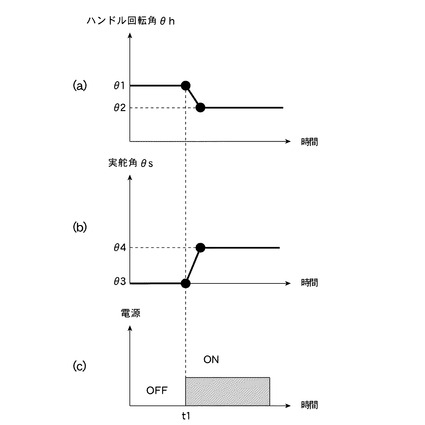
すなわち、例えば、図8(a)に示すように、電源オフの状態(起動前の状態)で、ステアリングが転舵することなくハンドルが回転してハンドル回転角θhがθ1となっていた場合、図8(c)に示すように、時刻t1において電源がオンされて船舶が起動すると、ハンドル回転角θhがθ1からθ2まで減少するようにハンドルが不意に回転するため、操船者に違和感を与えることになる。また、例えば、図8(b)に示すように、電源オフの状態(起動前の状態)で、ハンドルが回転することなくステアリングが転舵して実舵角θsがθ3となっていた場合、図8(c)に示すように、時刻t1において電源がオンされて船舶が起動すると、実舵角θsがθ3からθ4まで増大するようにステアリングが不意に転舵されるため、操船者に違和感を与えることになる。
【0009】
第2に、船舶が複数(2つ以上)のステーション(操船席)を備えている場合、これらのステーションのハンドル回転角θhが互いにずれているときには、ステーションの切替直後に、指令系統の変更に伴ってステアリングが不意に転舵し、操船者に違和感を与える事態が生じてしまう。
【0010】
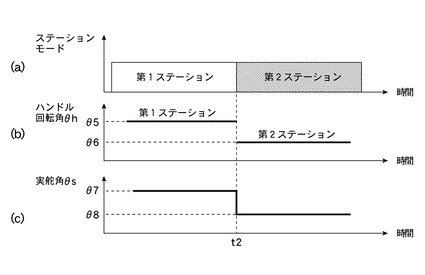
すなわち、例えば、図9(b)に示すように、第1ステーションのハンドル回転角θhがθ5であり、第2ステーションのハンドル回転角θhがθ6(<θ5)である場合、図9(a)に示すように、時刻t2においてステーションモードが第1ステーションから第2ステーションへ切り替わると、ハンドル回転角θhがθ5からθ6に減少するのに対応して目標舵角θs*も減少するため、図9(c)に示すように、実舵角θsがθ7からθ8に減少してステアリングが不意に転舵する。その結果、操船者に違和感を与えることになる。
【0011】
本発明は、このような事情に鑑み、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、また、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御方法、転舵制御装置および船舶を提供することを目的とする。
【課題を解決するための手段】
【0012】
かかる目的を達成するために、請求項1に記載の発明は、ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御方法であって、前記ハンドルのハンドル回転角変化量を演算し、このハンドル回転角変化量に基づいて目標舵角を算出し、この目標舵角に基づいて前記ステアリングを転舵させる転舵制御方法としたことを特徴とする。
【0013】
また、請求項2に記載の発明は、ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御装置であって、前記ハンドルのハンドル回転角変化量を演算する回転角変化量演算手段と、この回転角変化量演算手段によって演算されたハンドル回転角変化量に基づいて目標舵角を算出する目標舵角演算手段と、この目標舵角演算手段によって算出された目標舵角に基づいて前記ステアリングを転舵させるステアリング駆動手段とを備えている転舵制御装置としたことを特徴とする。
【0014】
また、請求項3に記載の発明は、請求項2に記載の構成に加え、前記回転角変化量演算手段は、現在のハンドル回転角および制御周期1つ以上前のハンドル回転角に基づいて前記ハンドル回転角変化量を演算することを特徴とする。
【0015】
また、請求項4に記載の発明は、請求項2に記載の構成に加え、前記回転角変化量演算手段は、ハンドル角速度を時間で積分して前記ハンドル回転角変化量を演算することを特徴とする。
【0016】
また、請求項5に記載の発明は、請求項2乃至4のいずれかに記載の転舵制御装置が搭載されている船舶としたことを特徴とする。
【発明の効果】
【0017】
請求項1に記載の発明によれば、ステアリングを転舵させるときに基準となる目標舵角がハンドル回転角変化量に基づいて算出される。そのため、電源オフの状態でハンドルとステアリングの片方のみが動いても、船舶の起動時において電源がオンされた途端にハンドルやステアリングが不意に所定の位置まで動いて操船者に違和感を与える恐れはない。また、船舶が複数のステーションを備えていて両方のステーションのハンドル回転角が互いにずれていても、ステーションの切替直後にステアリングが不意に転舵して操船者に違和感を与える恐れはない。したがって、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御方法を提供することができる。
【0018】
また、請求項2乃至4に記載の発明によれば、ステアリングを転舵させるときに基準となる目標舵角をハンドル回転角変化量に基づいて算出することができる。そのため、電源オフの状態でハンドルとステアリングの片方のみが動いても、船舶の起動時において電源がオンされた途端にハンドルやステアリングが不意に所定の位置まで動いて操船者に違和感を与える恐れはない。また、船舶が複数のステーションを備えていて両方のステーションのハンドル回転角が互いにずれていても、ステーションの切替直後にステアリングが不意に転舵して操船者に違和感を与える恐れはない。したがって、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御装置を提供することができる。
【0019】
また、請求項5に記載の発明によれば、請求項2乃至4に記載の発明と同じ効果を奏する船舶を提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について説明する。
[発明の実施の形態1]
【0021】
図1乃至図5には、本発明の実施の形態1を示す。
【0022】
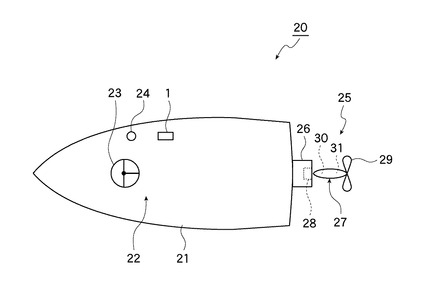
まず、構成を説明する。船舶20は、図1に示すように、船体21を有しており、船体21のほぼ中央部にはステーション22が設けられている。ステーション22にはハンドル23が時計方向・反時計方向に回転自在に支持されており、ハンドル23にはハンドル回転角センサ24が取り付けられている。また、船体21の後部(船尾)には船外機25が着脱自在に取り付けられており、船外機25は、ブラケット26と、推進器部分である船外機本体(ステアリング)27と、転舵モータなどのステアリング駆動装置28とから構成されている。ここで、ブラケット26は船体21の後部に固定されており、船外機本体27は、ステアリング駆動装置28によってステアリング軸回りに左右方向に転舵して推力方向を変更しうるようにブラケット26に支持されている。さらに、船外機本体27は、エンジン30と、駆動伝達機構31と、プロペラ(スクリュー)29とから構成されており、エンジン30の駆動力を駆動伝達機構31を介してプロペラ29へ伝達することにより、プロペラ29を回転させて推力を発生させることができる。なお、この船舶20では電動ステアリング機構が採用されており、ハンドル23とステアリング駆動装置28とが電気的に接続されている。
【0023】
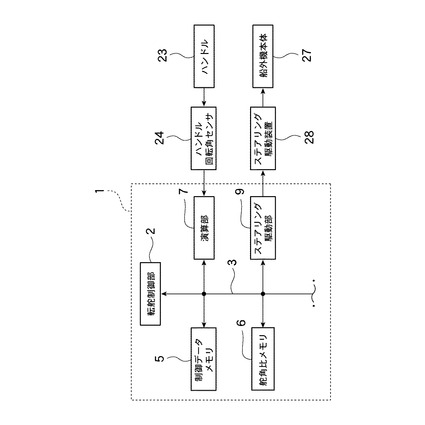
また、船舶20には、図1に示すように、転舵制御装置1が搭載されており、転舵制御装置1は、図2に示すように、CPU(中央処理装置)などの転舵制御部2を有している。転舵制御部2にはバス線3を介して制御データメモリ5、舵角比メモリ6、演算部(回転角変化量演算手段、目標舵角演算手段)7、ステアリング駆動部(ステアリング駆動手段)9が接続されている。また、舵角比メモリ6には、舵角比Kが船速に対応した形で読み出し自在に格納されている。さらに、演算部7には前記ハンドル回転角センサ24が接続されており、ステアリング駆動部9には前記ステアリング駆動装置28が接続されている。
【0024】
次に、作用について説明する。
【0025】
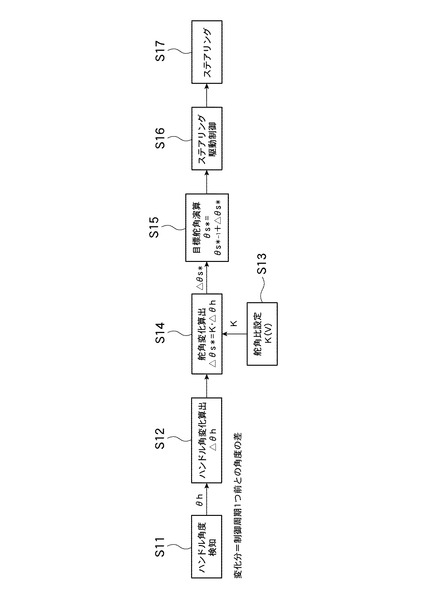
以上のような構成を有する船舶20を操縦する際には、操船者は、ステーション22でハンドル23を適宜回転させる。すると、転舵制御部2は、所定の制御周期(例えば、5ms)ごとに、図3に示すステップS11〜S17の手順に従って転舵制御を実行する。
【0026】
すなわち、転舵制御部2は、演算部7に対して、目標舵角θs*の算出動作を指令する。これを受けて演算部7は、以下に述べるとおり、ハンドル回転角変化量Δθhに比例する目標舵角変化量Δθs*から目標舵角θs*を算出する。なお、目標舵角は、後述する実舵角(船外機本体27の実際の角度)θsと区別するため、これに「*」を付して「θs*」と表す。
【0027】
まず、演算部7は、ハンドル回転角センサ24の検出信号に基づいて現在のハンドル回転角θh1を演算するとともに(ステップS11)、制御周期1つ前のハンドル回転角θh2を制御データメモリ5から読み出し、現在のハンドル回転角θh1から制御周期1つ前のハンドル回転角θh2を減じてハンドル回転角変化量Δθh(=θh1−θh2)を算出する(ステップS12)。さらに、次回の転舵制御に備えて、今回のハンドル回転角θh1を制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、制御周期1つ前の転舵制御自体が存在せず、ハンドル回転角変化量Δθhを算出することができないため、ハンドル回転角センサ24の検出信号に基づいて現在のハンドル回転角θh1を演算し、このハンドル回転角θh1を制御データメモリ5に記憶するにとどめる。
【0028】
次に、演算部7は、現在の船速に対応した舵角比K(例えば、K=1/24)を舵角比メモリ6から読み出して設定し(ステップS13)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*(=K・Δθh)を算出する(ステップS14)。ただし、第1回の転舵制御においては、上述したとおり、ハンドル回転角変化量Δθhが算出されておらず、目標舵角変化量Δθs*を算出することができないため、ここでの作業(ステップS13、S14)をパスする。
【0029】
最後に、演算部7は、制御周期1つ前の目標舵角θs*-1を制御データメモリ5から読み出し、この目標舵角θs*-1に目標舵角変化量Δθs*を足すことにより、今回の目標舵角θs*(=θs*-1+Δθs*)を算出する(ステップS15)。さらに、次回の転舵制御に備えて、今回の目標舵角θs*をθs*-1として制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、上述したとおり、目標舵角変化量Δθs*が算出されておらず、目標舵角θs*を算出することができないため、ここでの作業(ステップS15)をパスする。
【0030】
こうして目標舵角θs*が算出されたところで、転舵制御部2は、ステアリング駆動部9に対して、目標舵角θs*に基づく船外機本体27の転舵動作を指令する(ステップS16)。これを受けてステアリング駆動部9は、ステアリング駆動装置28を適宜駆動することにより、実舵角θsが目標舵角θs*に一致するように船外機本体27を転舵させる(ステップS17)。ただし、第1回の転舵制御においては、上述したとおり、目標舵角θs*が算出されていないので、船外機本体27の転舵動作の指令は出力されず、したがって、船外機本体27の転舵動作は行われない。
【0031】
そして、こうした一連の作業(ステップS11〜S17)からなる転舵制御を繰り返す。すると、船外機本体27の転舵動作が連続的に実行されることになる。
【0032】
このように、目標舵角θs*はハンドル回転角変化量Δθhに基づいて設定されることから、船外機本体27は、ハンドル23の初期位置(絶対角)とは関係なく、ハンドル23が回転した角度(相対角)に応じて転舵することになる。その結果、ハンドル23が回転しないときは、ハンドル回転角変化量Δθhがゼロとなり、目標舵角変化量Δθs*もゼロとなるので、船外機本体27は転舵しなくなる。
【0033】
そのため、電源オフの状態でハンドル23と船外機本体27の片方のみが動いた場合でも、船舶20の起動時において電源がオンされた途端にハンドル23や船外機本体27が不意に所定の位置まで動いて操船者に違和感を与える事態の発生を未然に防止することができる。
【0034】
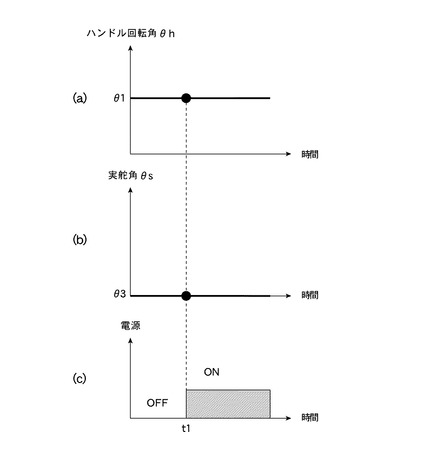
すなわち、例えば、図4(a)に示すように、電源オフの状態(起動前の状態)で、船外機本体27が転舵することなくハンドル23が回転してハンドル回転角θhがθ1となっていた場合、図4(c)に示すように、時刻t1において電源がオンされて船舶20が起動しても、ハンドル回転角θhはθ1のままとなり、ハンドル23が不意に回転することはない。したがって、船舶20の起動時において電源がオンされた途端にハンドル23が不意に回転して操船者に違和感を与える恐れはない。また、図4(b)に示すように、電源オフの状態(起動前の状態)で、ハンドル23が回転することなく船外機本体27が転舵して実舵角θsがθ3となっていた場合、図4(c)に示すように、時刻t1において電源がオンされて船舶20が起動しても、実舵角θsはθ3のままとなり、船外機本体27が不意に転舵することはない。したがって、船舶20の起動時において電源がオンされた途端に船外機本体27が不意に転舵して操船者に違和感を与える恐れはない。
【0035】
また、船舶20が2つのステーション22を備えていて両方のステーション22のハンドル回転角θhが互いにずれている場合でも、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える事態の発生を未然に防止することができる。
【0036】
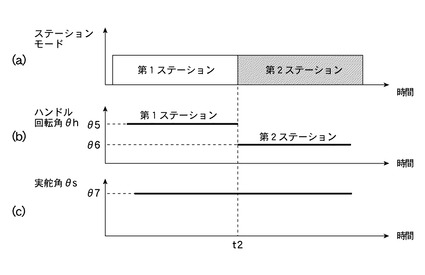
すなわち、例えば、図5(b)に示すように、第1ステーションのハンドル回転角θhがθ5であり、第2ステーションのハンドル回転角θhがθ6(<θ5)である場合、図5(a)に示すように、時刻t2においてステーションモードが第1ステーションから第2ステーションへ切り替わって指令系統が変更されても、図5(c)に示すように、実舵角θsはθ7のままとなり、船外機本体27が不意に転舵することはない。したがって、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える恐れはない。
[発明の実施の形態2]
【0037】
図6には、本発明の実施の形態2を示す。
【0038】
この実施の形態2に係る船舶20は、上述した実施の形態1と比べて、ハンドル回転角センサ24の代わりにエンコーダなどのハンドル角速度センサ(図示せず)が設けられていることを除き、同一の構成を有している。
【0039】
次に、作用について説明する。
【0040】
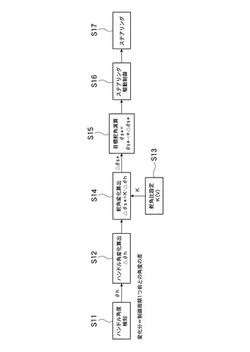
以上のような構成を有する船舶20を操縦する際には、操船者は、ステーション22でハンドル23を適宜回転させる。すると、転舵制御部2は、所定の制御周期(例えば、5ms)ごとに、図6に示すステップS21〜S27の手順に従って転舵制御を実行する。
【0041】
すなわち、転舵制御部2は、演算部7に対して、目標舵角θs*の算出動作を指令する。これを受けて演算部7は、以下に述べるとおり、ハンドル回転角変化量Δθhに比例する目標舵角変化量Δθs*から目標舵角θs*を算出する。
【0042】
まず、演算部7は、前記ハンドル角速度センサの検出信号に基づいてハンドル角速度θ'hを演算し(ステップS21)、このハンドル角速度θ'hを時間で積分してハンドル回転角変化量Δθh(=∫θ'h)を算出する(ステップS22)。
【0043】
次に、演算部7は、現在の船速に対応した舵角比K(例えば、K=1/24)を舵角比メモリ6から読み出して設定し(ステップS23)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*(=K・Δθh)を算出する(ステップS24)。
【0044】
最後に、演算部7は、制御周期1つ前の目標舵角θs*-1を制御データメモリ5から読み出し、この目標舵角θs*-1に目標舵角変化量Δθs*を足すことにより、今回の目標舵角θs*(=θs*-1+Δθs*)を算出する(ステップS25)。さらに、次回の転舵制御に備えて、今回の目標舵角θs*をθs*-1として制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、制御周期1つ前の転舵制御自体が存在せず、目標舵角θs*を算出することができないため、ここでの作業(ステップS25)をパスする。
【0045】
こうして目標舵角θs*が算出されたところで、転舵制御部2は、ステアリング駆動部9に対して、目標舵角θs*に基づく船外機本体27の転舵動作を指令する(ステップS26)。これを受けてステアリング駆動部9は、ステアリング駆動装置28を適宜駆動することにより、実舵角θsが目標舵角θs*に一致するように船外機本体27を転舵させる(ステップS27)。ただし、第1回の転舵制御においては、上述したとおり、目標舵角θs*が算出されていないので、船外機本体27の転舵動作の指令は出力されず、したがって、船外機本体27の転舵動作は行われない。
【0046】
そして、こうした一連の作業(ステップS21〜S27)からなる転舵制御を繰り返す。すると、船外機本体27の転舵動作が連続的に実行されることになる。
【0047】
このように、この実施の形態2では、上述した実施の形態1と比べて、ハンドル回転角変化量Δθhを演算する手法が異なるのみであり、それ以降の制御手順は同じである。その結果、ハンドル23が回転しないときは、ハンドル回転角変化量Δθhがゼロとなり、目標舵角変化量Δθs*もゼロとなるので、船外機本体27は転舵しなくなる。
【0048】
そのため、電源オフの状態でハンドル23と船外機本体27の片方のみが動いた場合でも、船舶20の起動時において電源がオンされた途端にハンドル23や船外機本体27が不意に所定の位置まで動いて操船者に違和感を与える事態の発生を未然に防止することができる。また、船舶20が2つのステーション22を備えていて両方のステーション22のハンドル回転角θhが互いにずれている場合でも、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える事態の発生を未然に防止することができる。
[発明のその他の実施の形態]
【0049】
なお、上述した実施の形態1では、ハンドル回転角変化量Δθhの算出に際して、現在のハンドル回転角θh1と制御周期1つ前のハンドル回転角θh2の2つのデータを利用してハンドル回転角変化量Δθhを算出する場合について説明した。しかし、制御周期1つ前のハンドル回転角θh2に代えて、制御周期1つ以上前の複数のハンドル回転角の平均値θhaveを使用することもできる。
【0050】
また、上述した実施の形態1、2では、2つのステーション22の切替時に効果を奏すると説明したが、3つ以上のステーション22の切替時についても同様である。或いは、ステーション22の切替時以外でも、指令系統が変更されたとき、例えば自動操縦(オートパイロット)モードが解除されたときや、リモートコントロールモードからハンドル操作モードに切り替わったときなどにも、ステーション22の切替時と同様の効果を奏するのは言及するまでもない。
【0051】
さらに、上述した実施の形態1、2では、船体21に船外機25が取り付けられた船舶20について説明したが、船外機25以外の船舶推進装置(例えば、船内外機など)が船体21に取り付けられた船舶20に本発明を適用することも勿論できる。
【0052】
また、上述した実施の形態1、2では、ステアリングの一例として船外機本体27を取り上げて説明したが、船外機本体27以外のステアリング(例えば、船内外機の舵部分、船内機を装備した船舶の舵部分など)を備えた船舶20に本発明を適用することも可能である。
【産業上の利用可能性】
【0053】
本発明は、プレジャーボート、小型滑走艇、水上オートバイなど各種の船舶に幅広く適用することができる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態1に係る船舶を示す平面図である。
【図2】同実施の形態1に係る転舵制御装置を示す制御ブロック図である。
【図3】同実施の形態1に係る転舵制御方法を示すフローチャートである。
【図4】同実施の形態1に係る転舵制御方法において電源オフの状態でハンドルと船外機本体の一方のみが回転したときの起動前後の様子を示すグラフであって、(a)はハンドル回転角の経時変化を示すグラフ、(b)は実舵角の経時変化を示すグラフ、(c)は電源のオン/オフ状態を示すグラフである。
【図5】同実施の形態1に係る転舵制御方法において2つのステーションのハンドル回転角が互いにずれているときのステーション切替前後の様子を示すグラフであって、(a)はステーションモードの切替状態を示すグラフ、(b)はハンドル回転角の経時変化を示すグラフ、(c)は実舵角の経時変化を示すグラフである。
【図6】本発明の実施の形態2に係る転舵制御方法を示すフローチャートである。
【図7】従来の転舵制御方法を例示するフローチャートである。
【図8】従来の転舵制御方法において電源オフの状態でハンドルと船外機本体の一方のみが回転したときの起動前後の様子を示すグラフであって、(a)はハンドル回転角の経時変化を示すグラフ、(b)は実舵角の経時変化を示すグラフ、(c)は電源のオン/オフ状態を示すグラフである。
【図9】従来の転舵制御方法において2つのステーションのハンドル回転角が互いにずれているときのステーション切替前後の様子を示すグラフであって、(a)はステーションモードの切替状態を示すグラフ、(b)はハンドル回転角の経時変化を示すグラフ、(c)は実舵角の経時変化を示すグラフである。
【符号の説明】
【0055】
1……転舵制御装置
2……転舵制御部
3……バス線
5……制御データメモリ
6……舵角比メモリ
7……演算部(回転角変化量演算手段、目標舵角演算手段)
9……ステアリング駆動部(ステアリング駆動手段)
20……船舶
21……船体
22……ステーション
23……ハンドル
24……ハンドル回転角センサ
25……船外機
26……ブラケット
27……船外機本体(ステアリング)
28……ステアリング駆動装置
29……プロペラ
30……エンジン
31……駆動伝達機構
K……舵角比
Δθh……ハンドル回転角変化量
Δθs*……目標舵角変化量
θh……ハンドル回転角
θ'h……ハンドル角速度
θs……実舵角
θs*……目標舵角
【技術分野】
【0001】
本発明は、電動ステアリング機構(ステア・バイ・ワイヤ方式のステアリング機構)を備えた船舶に適用するに好適な転舵制御方法、転舵制御装置および船舶に関するものである。
【背景技術】
【0002】
図7乃至図9には、従来の転舵制御方法を示す。
【0003】
従来、電動ステアリング機構を備えた船舶においては、ハンドルと船外機本体などのステアリング(舵)とが電気的に接続されており、図7に示すように、ハンドル回転角(絶対角)に応じてステアリングの目標舵角を設定する転舵制御が行われていた(例えば、特許文献1参照)。
【0004】
すなわち、ハンドル回転角センサの検出信号に基づいてハンドル回転角θhが演算されるとともに(ステップS31)、船速に対応した舵角比Kが設定され(ステップS32)、ハンドル回転角θhに舵角比Kが乗じられて目標舵角θs*(=K・θh)が算出される(ステップS33)。そして、この目標舵角θs*に基づく転舵動作が指令され(ステップS34)、実舵角θsが目標舵角θs*に一致するようにステアリングが転舵する(ステップS35)。
【0005】
ここで、舵角比Kは、ハンドル回転角θhに対する目標舵角θs*の比率を表し、船速に依存する定数である。例えば、舵角比Kが1/24である場合は、ハンドルを1回転(360°回転)させると、ステアリングが15°切れることになる。
【特許文献1】特許第2959044号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、このような転舵制御では、目標舵角θs*がハンドル回転角θhに基づいて設定されることから、次のような不都合があった。
【0007】
第1に、電動ステアリング機構を備えているため、電源がオフになっている状態(例えば、水上または陸上での保管時など)では、ステアリングに関係なくハンドルだけ独立して回転位置を動かすことが可能であり、逆に、ハンドルに関係なくステアリングだけ独立して転舵位置を動かすことも可能である。これらの場合、ハンドル回転角θh、ひいては目標舵角θs*に対して実舵角θsがずれた状態となるため、船舶の起動時において電源がオンされた途端に、ハンドルやステアリングが不意に所定の位置(ハンドル回転角θhと実舵角θsとが対応する位置)まで動いて操船者に違和感を与える事態が生じてしまう。
【0008】
すなわち、例えば、図8(a)に示すように、電源オフの状態(起動前の状態)で、ステアリングが転舵することなくハンドルが回転してハンドル回転角θhがθ1となっていた場合、図8(c)に示すように、時刻t1において電源がオンされて船舶が起動すると、ハンドル回転角θhがθ1からθ2まで減少するようにハンドルが不意に回転するため、操船者に違和感を与えることになる。また、例えば、図8(b)に示すように、電源オフの状態(起動前の状態)で、ハンドルが回転することなくステアリングが転舵して実舵角θsがθ3となっていた場合、図8(c)に示すように、時刻t1において電源がオンされて船舶が起動すると、実舵角θsがθ3からθ4まで増大するようにステアリングが不意に転舵されるため、操船者に違和感を与えることになる。
【0009】
第2に、船舶が複数(2つ以上)のステーション(操船席)を備えている場合、これらのステーションのハンドル回転角θhが互いにずれているときには、ステーションの切替直後に、指令系統の変更に伴ってステアリングが不意に転舵し、操船者に違和感を与える事態が生じてしまう。
【0010】
すなわち、例えば、図9(b)に示すように、第1ステーションのハンドル回転角θhがθ5であり、第2ステーションのハンドル回転角θhがθ6(<θ5)である場合、図9(a)に示すように、時刻t2においてステーションモードが第1ステーションから第2ステーションへ切り替わると、ハンドル回転角θhがθ5からθ6に減少するのに対応して目標舵角θs*も減少するため、図9(c)に示すように、実舵角θsがθ7からθ8に減少してステアリングが不意に転舵する。その結果、操船者に違和感を与えることになる。
【0011】
本発明は、このような事情に鑑み、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、また、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御方法、転舵制御装置および船舶を提供することを目的とする。
【課題を解決するための手段】
【0012】
かかる目的を達成するために、請求項1に記載の発明は、ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御方法であって、前記ハンドルのハンドル回転角変化量を演算し、このハンドル回転角変化量に基づいて目標舵角を算出し、この目標舵角に基づいて前記ステアリングを転舵させる転舵制御方法としたことを特徴とする。
【0013】
また、請求項2に記載の発明は、ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御装置であって、前記ハンドルのハンドル回転角変化量を演算する回転角変化量演算手段と、この回転角変化量演算手段によって演算されたハンドル回転角変化量に基づいて目標舵角を算出する目標舵角演算手段と、この目標舵角演算手段によって算出された目標舵角に基づいて前記ステアリングを転舵させるステアリング駆動手段とを備えている転舵制御装置としたことを特徴とする。
【0014】
また、請求項3に記載の発明は、請求項2に記載の構成に加え、前記回転角変化量演算手段は、現在のハンドル回転角および制御周期1つ以上前のハンドル回転角に基づいて前記ハンドル回転角変化量を演算することを特徴とする。
【0015】
また、請求項4に記載の発明は、請求項2に記載の構成に加え、前記回転角変化量演算手段は、ハンドル角速度を時間で積分して前記ハンドル回転角変化量を演算することを特徴とする。
【0016】
また、請求項5に記載の発明は、請求項2乃至4のいずれかに記載の転舵制御装置が搭載されている船舶としたことを特徴とする。
【発明の効果】
【0017】
請求項1に記載の発明によれば、ステアリングを転舵させるときに基準となる目標舵角がハンドル回転角変化量に基づいて算出される。そのため、電源オフの状態でハンドルとステアリングの片方のみが動いても、船舶の起動時において電源がオンされた途端にハンドルやステアリングが不意に所定の位置まで動いて操船者に違和感を与える恐れはない。また、船舶が複数のステーションを備えていて両方のステーションのハンドル回転角が互いにずれていても、ステーションの切替直後にステアリングが不意に転舵して操船者に違和感を与える恐れはない。したがって、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御方法を提供することができる。
【0018】
また、請求項2乃至4に記載の発明によれば、ステアリングを転舵させるときに基準となる目標舵角をハンドル回転角変化量に基づいて算出することができる。そのため、電源オフの状態でハンドルとステアリングの片方のみが動いても、船舶の起動時において電源がオンされた途端にハンドルやステアリングが不意に所定の位置まで動いて操船者に違和感を与える恐れはない。また、船舶が複数のステーションを備えていて両方のステーションのハンドル回転角が互いにずれていても、ステーションの切替直後にステアリングが不意に転舵して操船者に違和感を与える恐れはない。したがって、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与える事態の発生を未然に防止することが可能な転舵制御装置を提供することができる。
【0019】
また、請求項5に記載の発明によれば、請求項2乃至4に記載の発明と同じ効果を奏する船舶を提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について説明する。
[発明の実施の形態1]
【0021】
図1乃至図5には、本発明の実施の形態1を示す。
【0022】
まず、構成を説明する。船舶20は、図1に示すように、船体21を有しており、船体21のほぼ中央部にはステーション22が設けられている。ステーション22にはハンドル23が時計方向・反時計方向に回転自在に支持されており、ハンドル23にはハンドル回転角センサ24が取り付けられている。また、船体21の後部(船尾)には船外機25が着脱自在に取り付けられており、船外機25は、ブラケット26と、推進器部分である船外機本体(ステアリング)27と、転舵モータなどのステアリング駆動装置28とから構成されている。ここで、ブラケット26は船体21の後部に固定されており、船外機本体27は、ステアリング駆動装置28によってステアリング軸回りに左右方向に転舵して推力方向を変更しうるようにブラケット26に支持されている。さらに、船外機本体27は、エンジン30と、駆動伝達機構31と、プロペラ(スクリュー)29とから構成されており、エンジン30の駆動力を駆動伝達機構31を介してプロペラ29へ伝達することにより、プロペラ29を回転させて推力を発生させることができる。なお、この船舶20では電動ステアリング機構が採用されており、ハンドル23とステアリング駆動装置28とが電気的に接続されている。
【0023】
また、船舶20には、図1に示すように、転舵制御装置1が搭載されており、転舵制御装置1は、図2に示すように、CPU(中央処理装置)などの転舵制御部2を有している。転舵制御部2にはバス線3を介して制御データメモリ5、舵角比メモリ6、演算部(回転角変化量演算手段、目標舵角演算手段)7、ステアリング駆動部(ステアリング駆動手段)9が接続されている。また、舵角比メモリ6には、舵角比Kが船速に対応した形で読み出し自在に格納されている。さらに、演算部7には前記ハンドル回転角センサ24が接続されており、ステアリング駆動部9には前記ステアリング駆動装置28が接続されている。
【0024】
次に、作用について説明する。
【0025】
以上のような構成を有する船舶20を操縦する際には、操船者は、ステーション22でハンドル23を適宜回転させる。すると、転舵制御部2は、所定の制御周期(例えば、5ms)ごとに、図3に示すステップS11〜S17の手順に従って転舵制御を実行する。
【0026】
すなわち、転舵制御部2は、演算部7に対して、目標舵角θs*の算出動作を指令する。これを受けて演算部7は、以下に述べるとおり、ハンドル回転角変化量Δθhに比例する目標舵角変化量Δθs*から目標舵角θs*を算出する。なお、目標舵角は、後述する実舵角(船外機本体27の実際の角度)θsと区別するため、これに「*」を付して「θs*」と表す。
【0027】
まず、演算部7は、ハンドル回転角センサ24の検出信号に基づいて現在のハンドル回転角θh1を演算するとともに(ステップS11)、制御周期1つ前のハンドル回転角θh2を制御データメモリ5から読み出し、現在のハンドル回転角θh1から制御周期1つ前のハンドル回転角θh2を減じてハンドル回転角変化量Δθh(=θh1−θh2)を算出する(ステップS12)。さらに、次回の転舵制御に備えて、今回のハンドル回転角θh1を制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、制御周期1つ前の転舵制御自体が存在せず、ハンドル回転角変化量Δθhを算出することができないため、ハンドル回転角センサ24の検出信号に基づいて現在のハンドル回転角θh1を演算し、このハンドル回転角θh1を制御データメモリ5に記憶するにとどめる。
【0028】
次に、演算部7は、現在の船速に対応した舵角比K(例えば、K=1/24)を舵角比メモリ6から読み出して設定し(ステップS13)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*(=K・Δθh)を算出する(ステップS14)。ただし、第1回の転舵制御においては、上述したとおり、ハンドル回転角変化量Δθhが算出されておらず、目標舵角変化量Δθs*を算出することができないため、ここでの作業(ステップS13、S14)をパスする。
【0029】
最後に、演算部7は、制御周期1つ前の目標舵角θs*-1を制御データメモリ5から読み出し、この目標舵角θs*-1に目標舵角変化量Δθs*を足すことにより、今回の目標舵角θs*(=θs*-1+Δθs*)を算出する(ステップS15)。さらに、次回の転舵制御に備えて、今回の目標舵角θs*をθs*-1として制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、上述したとおり、目標舵角変化量Δθs*が算出されておらず、目標舵角θs*を算出することができないため、ここでの作業(ステップS15)をパスする。
【0030】
こうして目標舵角θs*が算出されたところで、転舵制御部2は、ステアリング駆動部9に対して、目標舵角θs*に基づく船外機本体27の転舵動作を指令する(ステップS16)。これを受けてステアリング駆動部9は、ステアリング駆動装置28を適宜駆動することにより、実舵角θsが目標舵角θs*に一致するように船外機本体27を転舵させる(ステップS17)。ただし、第1回の転舵制御においては、上述したとおり、目標舵角θs*が算出されていないので、船外機本体27の転舵動作の指令は出力されず、したがって、船外機本体27の転舵動作は行われない。
【0031】
そして、こうした一連の作業(ステップS11〜S17)からなる転舵制御を繰り返す。すると、船外機本体27の転舵動作が連続的に実行されることになる。
【0032】
このように、目標舵角θs*はハンドル回転角変化量Δθhに基づいて設定されることから、船外機本体27は、ハンドル23の初期位置(絶対角)とは関係なく、ハンドル23が回転した角度(相対角)に応じて転舵することになる。その結果、ハンドル23が回転しないときは、ハンドル回転角変化量Δθhがゼロとなり、目標舵角変化量Δθs*もゼロとなるので、船外機本体27は転舵しなくなる。
【0033】
そのため、電源オフの状態でハンドル23と船外機本体27の片方のみが動いた場合でも、船舶20の起動時において電源がオンされた途端にハンドル23や船外機本体27が不意に所定の位置まで動いて操船者に違和感を与える事態の発生を未然に防止することができる。
【0034】
すなわち、例えば、図4(a)に示すように、電源オフの状態(起動前の状態)で、船外機本体27が転舵することなくハンドル23が回転してハンドル回転角θhがθ1となっていた場合、図4(c)に示すように、時刻t1において電源がオンされて船舶20が起動しても、ハンドル回転角θhはθ1のままとなり、ハンドル23が不意に回転することはない。したがって、船舶20の起動時において電源がオンされた途端にハンドル23が不意に回転して操船者に違和感を与える恐れはない。また、図4(b)に示すように、電源オフの状態(起動前の状態)で、ハンドル23が回転することなく船外機本体27が転舵して実舵角θsがθ3となっていた場合、図4(c)に示すように、時刻t1において電源がオンされて船舶20が起動しても、実舵角θsはθ3のままとなり、船外機本体27が不意に転舵することはない。したがって、船舶20の起動時において電源がオンされた途端に船外機本体27が不意に転舵して操船者に違和感を与える恐れはない。
【0035】
また、船舶20が2つのステーション22を備えていて両方のステーション22のハンドル回転角θhが互いにずれている場合でも、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える事態の発生を未然に防止することができる。
【0036】
すなわち、例えば、図5(b)に示すように、第1ステーションのハンドル回転角θhがθ5であり、第2ステーションのハンドル回転角θhがθ6(<θ5)である場合、図5(a)に示すように、時刻t2においてステーションモードが第1ステーションから第2ステーションへ切り替わって指令系統が変更されても、図5(c)に示すように、実舵角θsはθ7のままとなり、船外機本体27が不意に転舵することはない。したがって、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える恐れはない。
[発明の実施の形態2]
【0037】
図6には、本発明の実施の形態2を示す。
【0038】
この実施の形態2に係る船舶20は、上述した実施の形態1と比べて、ハンドル回転角センサ24の代わりにエンコーダなどのハンドル角速度センサ(図示せず)が設けられていることを除き、同一の構成を有している。
【0039】
次に、作用について説明する。
【0040】
以上のような構成を有する船舶20を操縦する際には、操船者は、ステーション22でハンドル23を適宜回転させる。すると、転舵制御部2は、所定の制御周期(例えば、5ms)ごとに、図6に示すステップS21〜S27の手順に従って転舵制御を実行する。
【0041】
すなわち、転舵制御部2は、演算部7に対して、目標舵角θs*の算出動作を指令する。これを受けて演算部7は、以下に述べるとおり、ハンドル回転角変化量Δθhに比例する目標舵角変化量Δθs*から目標舵角θs*を算出する。
【0042】
まず、演算部7は、前記ハンドル角速度センサの検出信号に基づいてハンドル角速度θ'hを演算し(ステップS21)、このハンドル角速度θ'hを時間で積分してハンドル回転角変化量Δθh(=∫θ'h)を算出する(ステップS22)。
【0043】
次に、演算部7は、現在の船速に対応した舵角比K(例えば、K=1/24)を舵角比メモリ6から読み出して設定し(ステップS23)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*(=K・Δθh)を算出する(ステップS24)。
【0044】
最後に、演算部7は、制御周期1つ前の目標舵角θs*-1を制御データメモリ5から読み出し、この目標舵角θs*-1に目標舵角変化量Δθs*を足すことにより、今回の目標舵角θs*(=θs*-1+Δθs*)を算出する(ステップS25)。さらに、次回の転舵制御に備えて、今回の目標舵角θs*をθs*-1として制御データメモリ5に記憶する。ただし、第1回の転舵制御においては、制御周期1つ前の転舵制御自体が存在せず、目標舵角θs*を算出することができないため、ここでの作業(ステップS25)をパスする。
【0045】
こうして目標舵角θs*が算出されたところで、転舵制御部2は、ステアリング駆動部9に対して、目標舵角θs*に基づく船外機本体27の転舵動作を指令する(ステップS26)。これを受けてステアリング駆動部9は、ステアリング駆動装置28を適宜駆動することにより、実舵角θsが目標舵角θs*に一致するように船外機本体27を転舵させる(ステップS27)。ただし、第1回の転舵制御においては、上述したとおり、目標舵角θs*が算出されていないので、船外機本体27の転舵動作の指令は出力されず、したがって、船外機本体27の転舵動作は行われない。
【0046】
そして、こうした一連の作業(ステップS21〜S27)からなる転舵制御を繰り返す。すると、船外機本体27の転舵動作が連続的に実行されることになる。
【0047】
このように、この実施の形態2では、上述した実施の形態1と比べて、ハンドル回転角変化量Δθhを演算する手法が異なるのみであり、それ以降の制御手順は同じである。その結果、ハンドル23が回転しないときは、ハンドル回転角変化量Δθhがゼロとなり、目標舵角変化量Δθs*もゼロとなるので、船外機本体27は転舵しなくなる。
【0048】
そのため、電源オフの状態でハンドル23と船外機本体27の片方のみが動いた場合でも、船舶20の起動時において電源がオンされた途端にハンドル23や船外機本体27が不意に所定の位置まで動いて操船者に違和感を与える事態の発生を未然に防止することができる。また、船舶20が2つのステーション22を備えていて両方のステーション22のハンドル回転角θhが互いにずれている場合でも、ステーション22の切替直後に船外機本体27が不意に転舵して操船者に違和感を与える事態の発生を未然に防止することができる。
[発明のその他の実施の形態]
【0049】
なお、上述した実施の形態1では、ハンドル回転角変化量Δθhの算出に際して、現在のハンドル回転角θh1と制御周期1つ前のハンドル回転角θh2の2つのデータを利用してハンドル回転角変化量Δθhを算出する場合について説明した。しかし、制御周期1つ前のハンドル回転角θh2に代えて、制御周期1つ以上前の複数のハンドル回転角の平均値θhaveを使用することもできる。
【0050】
また、上述した実施の形態1、2では、2つのステーション22の切替時に効果を奏すると説明したが、3つ以上のステーション22の切替時についても同様である。或いは、ステーション22の切替時以外でも、指令系統が変更されたとき、例えば自動操縦(オートパイロット)モードが解除されたときや、リモートコントロールモードからハンドル操作モードに切り替わったときなどにも、ステーション22の切替時と同様の効果を奏するのは言及するまでもない。
【0051】
さらに、上述した実施の形態1、2では、船体21に船外機25が取り付けられた船舶20について説明したが、船外機25以外の船舶推進装置(例えば、船内外機など)が船体21に取り付けられた船舶20に本発明を適用することも勿論できる。
【0052】
また、上述した実施の形態1、2では、ステアリングの一例として船外機本体27を取り上げて説明したが、船外機本体27以外のステアリング(例えば、船内外機の舵部分、船内機を装備した船舶の舵部分など)を備えた船舶20に本発明を適用することも可能である。
【産業上の利用可能性】
【0053】
本発明は、プレジャーボート、小型滑走艇、水上オートバイなど各種の船舶に幅広く適用することができる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態1に係る船舶を示す平面図である。
【図2】同実施の形態1に係る転舵制御装置を示す制御ブロック図である。
【図3】同実施の形態1に係る転舵制御方法を示すフローチャートである。
【図4】同実施の形態1に係る転舵制御方法において電源オフの状態でハンドルと船外機本体の一方のみが回転したときの起動前後の様子を示すグラフであって、(a)はハンドル回転角の経時変化を示すグラフ、(b)は実舵角の経時変化を示すグラフ、(c)は電源のオン/オフ状態を示すグラフである。
【図5】同実施の形態1に係る転舵制御方法において2つのステーションのハンドル回転角が互いにずれているときのステーション切替前後の様子を示すグラフであって、(a)はステーションモードの切替状態を示すグラフ、(b)はハンドル回転角の経時変化を示すグラフ、(c)は実舵角の経時変化を示すグラフである。
【図6】本発明の実施の形態2に係る転舵制御方法を示すフローチャートである。
【図7】従来の転舵制御方法を例示するフローチャートである。
【図8】従来の転舵制御方法において電源オフの状態でハンドルと船外機本体の一方のみが回転したときの起動前後の様子を示すグラフであって、(a)はハンドル回転角の経時変化を示すグラフ、(b)は実舵角の経時変化を示すグラフ、(c)は電源のオン/オフ状態を示すグラフである。
【図9】従来の転舵制御方法において2つのステーションのハンドル回転角が互いにずれているときのステーション切替前後の様子を示すグラフであって、(a)はステーションモードの切替状態を示すグラフ、(b)はハンドル回転角の経時変化を示すグラフ、(c)は実舵角の経時変化を示すグラフである。
【符号の説明】
【0055】
1……転舵制御装置
2……転舵制御部
3……バス線
5……制御データメモリ
6……舵角比メモリ
7……演算部(回転角変化量演算手段、目標舵角演算手段)
9……ステアリング駆動部(ステアリング駆動手段)
20……船舶
21……船体
22……ステーション
23……ハンドル
24……ハンドル回転角センサ
25……船外機
26……ブラケット
27……船外機本体(ステアリング)
28……ステアリング駆動装置
29……プロペラ
30……エンジン
31……駆動伝達機構
K……舵角比
Δθh……ハンドル回転角変化量
Δθs*……目標舵角変化量
θh……ハンドル回転角
θ'h……ハンドル角速度
θs……実舵角
θs*……目標舵角
【特許請求の範囲】
【請求項1】
ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御方法であって、
前記ハンドルのハンドル回転角変化量を演算し、
このハンドル回転角変化量に基づいて目標舵角を算出し、
この目標舵角に基づいて前記ステアリングを転舵させることを特徴とする転舵制御方法。
【請求項2】
ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御装置であって、
前記ハンドルのハンドル回転角変化量を演算する回転角変化量演算手段と、
この回転角変化量演算手段によって演算されたハンドル回転角変化量に基づいて目標舵角を算出する目標舵角演算手段と、
この目標舵角演算手段によって算出された目標舵角に基づいて前記ステアリングを転舵させるステアリング駆動手段とを備えていることを特徴とする転舵制御装置。
【請求項3】
前記回転角変化量演算手段は、現在のハンドル回転角および制御周期1つ以上前のハンドル回転角に基づいて前記ハンドル回転角変化量を演算することを特徴とする請求項2に記載の転舵制御装置。
【請求項4】
前記回転角変化量演算手段は、ハンドル角速度を時間で積分して前記ハンドル回転角変化量を演算することを特徴とする請求項2に記載の転舵制御装置。
【請求項5】
請求項2乃至4のいずれかに記載の転舵制御装置が搭載されていることを特徴とする船舶。
【請求項1】
ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御方法であって、
前記ハンドルのハンドル回転角変化量を演算し、
このハンドル回転角変化量に基づいて目標舵角を算出し、
この目標舵角に基づいて前記ステアリングを転舵させることを特徴とする転舵制御方法。
【請求項2】
ハンドルとステアリングとが電気的に接続された船舶に適用される転舵制御装置であって、
前記ハンドルのハンドル回転角変化量を演算する回転角変化量演算手段と、
この回転角変化量演算手段によって演算されたハンドル回転角変化量に基づいて目標舵角を算出する目標舵角演算手段と、
この目標舵角演算手段によって算出された目標舵角に基づいて前記ステアリングを転舵させるステアリング駆動手段とを備えていることを特徴とする転舵制御装置。
【請求項3】
前記回転角変化量演算手段は、現在のハンドル回転角および制御周期1つ以上前のハンドル回転角に基づいて前記ハンドル回転角変化量を演算することを特徴とする請求項2に記載の転舵制御装置。
【請求項4】
前記回転角変化量演算手段は、ハンドル角速度を時間で積分して前記ハンドル回転角変化量を演算することを特徴とする請求項2に記載の転舵制御装置。
【請求項5】
請求項2乃至4のいずれかに記載の転舵制御装置が搭載されていることを特徴とする船舶。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−83595(P2009−83595A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−254113(P2007−254113)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000176213)ヤマハマリン株式会社 (256)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000176213)ヤマハマリン株式会社 (256)
[ Back to top ]