
軸力検知締結工具
【課題】ボルトの係合部をインナー・ソケットに正確に嵌合させることを可能とする。
【解決手段】軸回り回転で締め込み可能なソケット本体5と、工具本体3側のインナー・ソケット支持筒16と、ボルト55のピンテール83を嵌合支持させ工具本体3に対して回り止め係止する凹部35を先端側内周に備えたインナー・ソケット7と、センサ・スプリング45と、出入力した超音波をボルト75の軸力検出に用いるための超音波センサ11と、インナー・ソケット7の外周側への突出位置でインナー・ソケット支持筒16に軸方向に係合しソケット本体5に対するインナー・ソケット7の軸方向移動を阻止するストッパ・ピン65と、ストッパ・ピン65の内端に対向してストッパ・ピン65の没移動を阻止し超音波センサ11がインナー・ソケット7に対し軸方向へ退避移動するとストッパ・ピン65の没移動を許容するロック部材67とを備えたことを特徴とする。
【解決手段】軸回り回転で締め込み可能なソケット本体5と、工具本体3側のインナー・ソケット支持筒16と、ボルト55のピンテール83を嵌合支持させ工具本体3に対して回り止め係止する凹部35を先端側内周に備えたインナー・ソケット7と、センサ・スプリング45と、出入力した超音波をボルト75の軸力検出に用いるための超音波センサ11と、インナー・ソケット7の外周側への突出位置でインナー・ソケット支持筒16に軸方向に係合しソケット本体5に対するインナー・ソケット7の軸方向移動を阻止するストッパ・ピン65と、ストッパ・ピン65の内端に対向してストッパ・ピン65の没移動を阻止し超音波センサ11がインナー・ソケット7に対し軸方向へ退避移動するとストッパ・ピン65の没移動を許容するロック部材67とを備えたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車のサスペンション等のボルト・ナットの締結に供される軸力検知締結工具に関する。
【背景技術】
【0002】
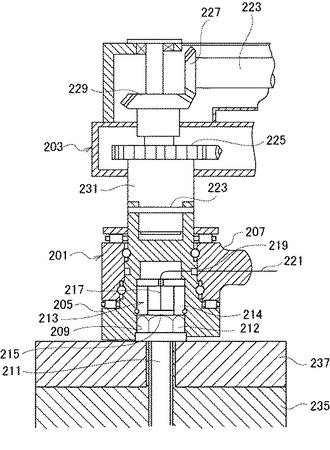
従来の軸力検知締結工具としては、例えば図5に示すようなものがある。
【0003】
図5の締結工具は、測定用ソケット201がトルク・レンチ203に着脱自在に装着されたものである。測定用ソケット201は、ソケット本体205と、静止部材207とを備えている。ソケット本体105は、静止部材107に対し相対回転可能となっている。ソケット本体205には、ボルト嵌合穴209が設けられている。ボルト嵌合穴209は、ボルト211の頭部212に嵌合する構成となっている。ボルト嵌合穴209の奥側には、超音波センサ213が収容配置されている。
【0004】
前記超音波センサ213は、永久磁石で形成された本体214に圧電素子115を取り付けたものである。圧電素子215は、前記ボルト頭部212に直接当接する構成となっている。圧電素子215にはリード線217が接続され、リード線217はスリップ・リング219の一方の端子に接続されている。スリップ・リング219の他方の端子には、前記静止部材207に支持された同軸ケーブル221が接続されている。
【0005】
前記トルク・レンチ203は、駆動軸223とラチェット機構225とがベベル・ギヤ227,229の噛み合いによって回転連動する構成となっている。ラチェット機構225に連動するシャフト部231がソケット本体205の上端に嵌合し、ピン233によって結合されている。
【0006】
ボルト締結に際し、前記ソケット本体205のボルト嵌合穴209をボルト211の頭部212に嵌合させると、頭部212が永久磁石の本体214に吸着され圧電素子215を頭部212上面に当接させることができる。
【0007】
次いで、前記駆動軸223を回転駆動するとベベル・ギヤ227,229、ラチェット機構225を介してシャフト部231が回転駆動される。シャフト部231の回転によってソケット本体205が連動し、静止部材207に対して回転する。ソケット本体205の回転によって、ボルト211の頭部212が回転力を受けボルト211がブロック235に対し締め込まれ、被締結物237が締結される。
【0008】
このとき、前記ボルト211による締結力は、ボルト211の軸力管理によって行われる。すなわち、コントローラの制御により圧電素子215から超音波を発信させると、ボルト211の先端で反射した反射波を圧電素子215が受信する。コントローラは、前記超音波を発信した時点から反射波を受信した時点までの経過時間を、超音波がボルト211をその軸心長さ方向に往復するために必要な往復時間として求め、この往復時間からボルト111の軸心長さを求める。そして、締め付けに伴うボルト211の軸心長さの伸び率を求め、さらにこの伸び率と比例関係にある軸力値を求め、この軸力値が設定値になったときに、ボルト211の締結を完了することができる。従って、ボルト211の軸力に応じた正確な締結を行うことができる。
【0009】
しかしながら、上記の構造では、ボルト211をブロック135等に直接締結する場合に用いることはできるが、ボルト211にナットを締め込む作業では、ソケット本体205をナットに嵌合させて締め込んでもボルト211が共回りしてしまい、軸力検知締結工具を片手で持ち軸力を測定しながらナットを締め込む作業を行うことは全くできなくなる。
【0010】
前記ボルト211にナットを締め込む作業において、前記ボルトが例えば植え込みボルトの様な場合にはボルトの供回りを起こさずにナットを締め込むことは可能である。しかしこの場合は、ナットを締め込む過程においてボルト先端と圧電素子215とが相対回転する構造となり、圧電素子215の破損を招きやすく、ボルト軸力を測定しながらナットを締め込む作業を行うことは結果的に困難であった。
【0011】
また、ボルトにナットを締め込むと、ナットに対してボルト先端が締め込みに応じて突出するため、図5のように、ソケット本体205に超音波センサ213を固定的に設けたものではボルト先端の超音波センサ213側への突出に対応することができない。
【0012】
さらに、永久磁石で形成された本体214に圧電素子215を固定的に取り付けているため、本体214がボルト211の頭部212に当接する面と圧電素子215がボルト211の頭部212に当接する面とを正確に面合わせしないと本体214は頭部212に正確に当接するが圧電素子215は正確に当接することができなくなる恐れがあり、本体214と圧電素子215との組付けが極めて煩雑且つ困難なものになる恐れがある。
【0013】
また、ソケット本体205に対し超音波センサ213が固定的に取り付けられているため、圧電素子215とコントローラ側との信号伝達を相対回転するソケット本体205及び静止部材207間で行わなければならず、リード線217と同軸ケーブル221とをスリップ・リング219で接続する構造となり、構造が複雑になると共にスリップ・リング219での耐久性が低いという問題がある。
【0014】
加えて、静止部材207がソケット本体205とトルク・レンチ203との間に存在しているため、例えば車両の組み立て工程において、サスペンションスラットとナックル・アームとの締結等、奥まった箇所のナットの締め込みを行う場合に、ソケット本体205を奥まった箇所に挿入しようとしても静止部材207の存在によってそれほど奧まで挿入することができず、作業が困難となるか限界を招く恐れがある。
【0015】
これに対し、ボルトの先端外周にセレーションなどにより軸方向に沿った回転方向の係合部としてピン・テールを形成し、ボルトの軸力を検知しながらこのボルトにナットを締め込み可能な軸力検知締結工具を本出願人は既に提案している。
【0016】
この軸力検知締結工具では、ボルトの係合部であるピン・テールに工具のインナー・ソケットの係支部を正確に嵌合させることでボルト先端に超音波センサを当接させるようにしている。この状態でボルトはインナー・ソケットを介して工具側に回り止めされる。このボルトに螺合し工具のソケット本体に設けられたナット嵌合部に嵌合するナットが、電動モータにより回転駆動されるソケット本体の回転によりボルトに締結される。このとき、ボルトの先端に当接する超音波センサが出力した超音波がボルト頭部の面で反射されて超音波センサに入力され、ボルトの軸力検出を行わせることができる。
【0017】
このような軸力検知締結工具では、ボルトのピン・テールをインナー・ソケットに正確に嵌合させることが課題となる。
【0018】
【特許文献1】特開2000−74764号公報
【特許文献2】特開2005−279920号公報
【発明の開示】
【発明が解決しようとする課題】
【0019】
解決しようとする問題点は、ボルトに対しナットを締結しながらボルト軸力を測定する軸力検知締結工具では、ボルトの係合部をインナー・ソケットに正確に嵌合させることが肝要となる点である。
【課題を解決するための手段】
【0020】
本発明は、ボルトの係合部をインナー・ソケットに正確に嵌合させるために、先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、前記ソケット本体に対し同心状に形成された工具本体側の支持部と、前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材とを備えたことを最も主要な特徴とする。
【発明の効果】
【0021】
本発明の軸力検知締結工具は、先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、前記ソケット本体に対し同心状に形成された工具本体側の支持部と、前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材とを備えた。
【0022】
このため、ソケット本体の軸回り回転によりボルトに対しナットを締め込むとき、超音波センサとボルトとが相対回転せず、超音波センサの破損を抑制し、耐久性を向上させることができる。
【0023】
前記超音波センサは、付勢部材の付勢力によりボルトの先端に正確に弾接することができ、正確な軸力検知を行わせることができる。
【0024】
前記ナットの締め込みに際し、ボルト先端がナットに対し超音波センサ側に相対的に突出しても、超音波センサが付勢部材の付勢力に抗して工具本体側に後退することができ、軸力検知を行いながらボルトに対してナットを無理なく締め込むことができる。
【0025】
前記超音波センサは、工具本体側に支持されているため、工具本体側から超音波センサに対しスリップ・リングを介すことなく直接的に配線を行うことができ、耐久性を向上させることができる。
【0026】
前記工具本体側とソケット本体側との間に他の静止部材が介在することがないため、ナットが狭い空間の奥まった箇所に位置している場合でも、工具本体を持つことによってソケット本体先端側を狭い箇所に挿入し、そのナット嵌合部にナットを嵌合させて容易に締結作業及び軸力検知を行わせることができ、作業性を大幅に向上させることができる。
【0027】
しかも、超音波センサが前記係止部側に臨んだ位置でロック部材が前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止するから、超音波センサがインナー・ソケットの係止部から軸方向へ退避移動しようとするとき、ストッパ部材がインナー・ソケットの外周側への突出位置で工具本体側の支持部に係合してインナー・ソケットの退避移動が阻止される。
【0028】
このため、ボルトの先端がインナー・ソケットに正常に嵌合しない誤挿入時には、ナット嵌合部内にインナー・ソケットが臨んだ状態が維持されることでナット嵌合部に対するナットの嵌合を規制し、誤挿入を知らせることができる。
【0029】
ボルトの先端がインナー・ソケットに正常に嵌合して係合部が係止部に嵌入されると、ボルトの先端から力を受けて超音波センサが軸方向へ退避移動し、ロック部材がストッパ部材の没移動を許容する状態となる。
【0030】
したがって、インナー・ソケットがボルトから押圧力を受けるとストッパ部材が工具本体側の支持部に軸方向に当接して径方向内側への力を受け、ストッパ部材がインナー・ソケットの径方向内側へ没移動する。
【0031】
このため、インナー・ソケットがソケット本体のナット嵌合部から軸方向へ退避移動し、ナット嵌合部へナットを正常に嵌合させることができる。この嵌合により、ボルトを回り止めしながらナットを締結し、超音波センサにより軸力を検知しつつ締結を完了させることができる。
【発明を実施するための最良の形態】
【0032】
ボルトに対しナットを締結しながらボルト軸力を測定する軸力検知締結工具であって、ボルトの係合部をインナー・ソケットに正確に嵌合させるという目的を、インナー・ソケットに設けたストッパ部材と超音波センサに設けたロック部材とにより実現した。
【実施例1】
【0033】
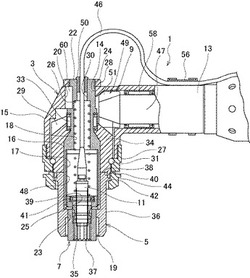
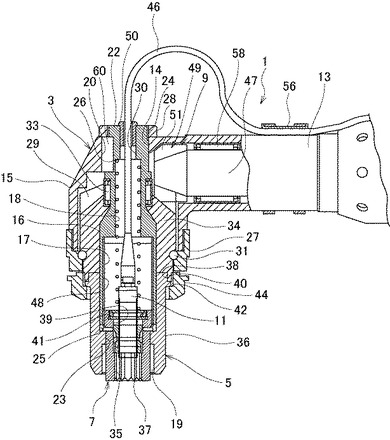
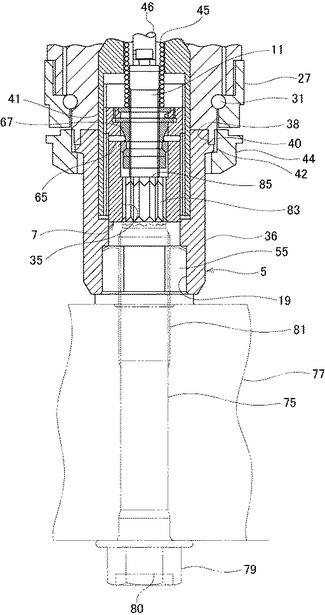
図1は、本発明の実施例1に係る軸力検知締結工具の一部省略断面図、図2は、同要部拡大断面図である。
【0034】
図1,図2のように、軸力検知締結工具1は、工具本体3と、ソケット本体5と、インナー・ソケット7と、回転アクチュエータである電動モータの回転を伝達する駆動伝達機構9と、超音波センサ11とからなっている。
【0035】
前記工具本体3は、中空のレバー部13と、中空のレバー・ヘッド15とが一体に形成されたものである。前記レバー部13は中空に形成され、作業者が片手で把持できるようになっている。レバー部13の図外の端部には、前記電動モータが取り付けられている。
【0036】
前記レバー・ヘッド15は、その軸心がレバー部13の軸心に対して直交し、軸心部に工具本体3側の支持部としてインナー・ソケット支持筒16が同心状に着脱可能に固定されている。
【0037】
前記レバー・ヘッド15には、支持筒取付穴14が設けられている。支持筒取付穴14には、キー溝20が設けられている。
【0038】
前記インナー・ソケット支持筒16は、取付端22に雄ねじ部24とキー溝26とが設けられている。取付端22は、前記レバー・ヘッド15の支持筒取付穴14に挿入され、ナット28により固定されると共に、キー溝20,26に嵌合するキー60で回り止めがなされている。
【0039】
前記インナー・ソケット支持筒16の先端側内周には、軸心方向に沿ったインナー・スプライン17が設けられている。インナー・ソケット支持筒16の奥側には、スプリング支持穴18が設けられている。スプリング支持穴18は、貫通孔30を介して前記取付端22外に連通している。
【0040】
前記ソケット本体5は、前記工具本体3のレバー・ヘッド15に回転可能に支持されている。ソケット本体5は、回転連動部34とナット駆動部36とからなっている。
【0041】
前記回転連動部34には、係合穴38が設けられている。係合穴38は、例えば断面六角穴で構成されている。前記ナット駆動部36には、係合端部40が設けられている。係合端部40は、前記係合穴38に対応して断面六角に形成されている。前記係合端部に隣接してナット駆動部36には、係合フランジ42が設けられている。前記回転連動部34の係合穴38に前記ナット駆動部36の係合端部40が嵌合し、回転連動部34に螺合するナット部材44により前記係合フランジ42が締結力を受け、回転連動部34にナット駆動部36が相対回転不能に締結結合されている。
【0042】
前記ナット駆動部36の端部にナット55に嵌合させるためのナット嵌合部19が形成されている。ナット嵌合部19は、例えば六角ナットに対応して嵌合できるように、断面六角に形成されている。前記ナット嵌合部19の奧壁21には、断面円形のインナー・ソケット挿通穴23が設けられ、奥壁21に隣接して前記インナー・ソケット挿通穴23に連通する嵌合軸穴25が設けられている。嵌合軸穴25は、前記インナー・ソケット支持筒16の外周囲に嵌合し、ナット駆動部36は、インナー・ソケット支持筒16に対し相対回転可能となっている。
【0043】
前記回転連動部34は、前記ナット駆動部36の嵌合軸穴25と同径の嵌合軸穴48を有し、該嵌合軸穴48が前記インナー・ソケット支持筒16の外周囲に嵌合し、回転連動部34は、インナー・ソケット支持筒16に対し相対回転可能となっている。回転連動部34は、外周側が前記レバー・ヘッド15に螺合するキャップ27に軸受31によって回転自在に支持されている。回転連動部34の内周側は、ニードル・ベアリング33によってインナー・ソケット支持筒16の取付端22側に回転自在に支持されている。前記回転連動部34の基部側の端部には、回転連動用のベベル・ギヤ29が設けられている。
【0044】
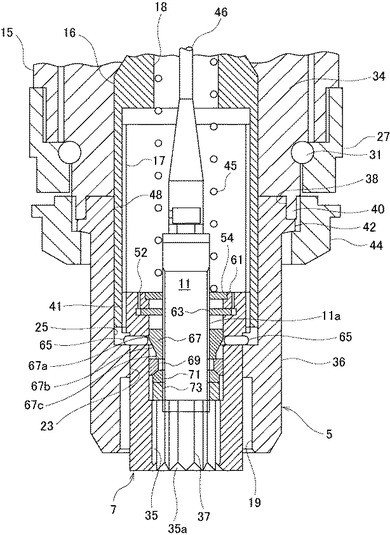
前記インナー・ソケット7は、断面円形に形成され、前記ソケット本体5及びインナー・ソケット支持筒16内に同心状に配置され、工具本体3側のインナー・ソケット支持筒16に対して回転不能且つ軸方向可動支持されていると共に、ボルト先端の回り止め用の係合部を係止する係止部としてインナー・セレーション37を有している。すなわち、インナー・ソケット7の先端には、前記係止部を構成する凹部35が設けられている。凹部35の内周面に、インナー・セレーション37が設けられ、凹部35の開口端にピンテールの挿入を容易にする面取り35aが設けられている。
【0045】
前記インナー・ソケット7の軸心部には、センサ挿通穴39が貫通形成されている。インナー・ソケット7は、前記インナー・ソケット挿通穴23から前記ナット嵌合部19内へ臨み、その先端がナット嵌合部19外へ突出している。インナー・ソケット7の基端部には、スプライン41が設けられている。スプライン41は、前記インナー・ソケット支持筒16のインナー・スプライン17にスプライン嵌合している。このスプライン嵌合により、インナー・ソケット7は、インナー・ソケット支持筒16に対し、回転不能、且つ、ナット嵌合部19から退避移動するように軸心方向へ可動支持されている。
【0046】
前記インナー・ソケット7の軸心部のセンサ挿通穴39に、前記超音波センサ11が挿通され、軸心方向へ一定範囲で可動支持されている。超音波センサ11の先端は、インナー・ソケット7の凹部35内に臨んでいる。この超音波センサ11は、ボルト先端に当接した状態で超音波を出入力し、ボルトの軸力検出に用いるものである。
【0047】
前記インナー・ソケット7の基端面には、ねじ穴52が設けられ、ばね座54を支持した取付座61が螺合して取り付けられている。ねじ穴52の奥側に当接部材63が配置され、取付座61によりインナー・ソケット7に対して締結固定されている。
【0048】
ばね座54とインナー・ソケット支持筒16のスプリング支持穴18との間には、付勢部材としてセンサ・スプリング45が介設されている。
【0049】
センサ・スプリング45によりインナー・ソケット支持筒16に対してインナー・ソケット7を付勢し前記ナット嵌合部19側に臨ませる。また、センサ・スプリング45によって、インナー・ソケット7を介し超音波センサ11がナット嵌合部19側へ向けて付勢される構成となっている。
【0050】
前記インナー・ソケット7には、ストッパ部材としてのストッパ・ピン65が径方向へ可動支持されている。ストッパ・ピン65は、両端が球面を成し、インナー・ソケット7の周方向へ所定間隔で複数備えられている。
【0051】
このストッパ・ピン65は、インナー・ソケット7の外周に対し出没可能でインナー・ソケット7外周側への突出位置で前記インナー・ソケット支持筒16のインナー・スプライン17下端に軸方向に係合し前記ソケット本体5に対する前記インナー・ソケット7の軸方向移動を阻止する。
【0052】
また、ストッパ・ピン65は、ソケット本体5のインナー・ソケット挿通穴23の縁部に軸方向に係合して該ソケット本体5に対する前記インナー・ソケット7のソケット本体5外への軸方向移動を阻止する。
【0053】
前記超音波センサ11には、雄ねじ部11aが設けられ、ロック部材67が螺合固定されている。ロック部材67には、外周面に大径部67a,テーパー部67b、小径部67cが備えられている。
【0054】
この超音波センサ11側に設けられたロック部材67は、該超音波センサ11が凹部35側に臨んだ位置で大径部67aが前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65のインナー・ソケット7に対する没移動を阻止する。前記超音波センサ11が前記凹部35から一定範囲で前記インナー・ソケット7に対し軸方向へ退避移動するとロック部材67の小径部67cが前記ストッパ・ピン65の内端に対向し、ストッパ・ピン65のインナー・ソケット7に対する没移動を許容することができる。
【0055】
超音波センサ11のインナー・ソケット7に対する一定範囲での退避移動は、ロック部材67が当接部材63に当接するまでの範囲となる。
【0056】
超音波センサ11の先端側には、スペーサ69を介してナット71、ロック・ナット73が締結されている。
【0057】
前記超音波センサ11の配線であるリード線46は、前記センサ・スプリング45の内側を通って、スプリング支持穴18側に延設され、スプリング支持穴18から貫通孔30に取り付けられたグロメット54を貫通してレバー・ヘッド15外部に引き出され、軸力演算用の図外のコントローラに接続されている。リード線46は、レバー部13外面に複数箇所で固定バンド56により支持されている。
【0058】
前記駆動伝達機構9は、駆動軸47と、ベベル・ギヤ機構49とからなっている。駆動軸47は、前記工具本体3のレバー部13内に沿って配置され、ニードル・ベアリング58等によりレバー部13に回転可能に支持されている。駆動軸47は、前記電動モータにより回転駆動される構成となっている。
【0059】
前記ベベル・ギヤ機構49は、駆動軸47と前記ソケット本体5との間に設けられ、噛み合いにより駆動軸47の回転をソケット本体5に伝達するものである。ベベル・ギヤ機構49は、前記ソケット本体5のベベル・ギヤ29と、駆動軸47の端部に設けられたベベル・ギヤ51とからなり、ベベル・ギヤ29,51相互が噛み合っている。
【0060】
前記軸力検知締結工具1は、前記ナット28の締結を外すと共に、レバー・ヘッド15に対するキャップ27の螺合を外すことで、インナー・ソケット支持筒16、ソケット本体5、及びインナー・ソケット7をユニットとして着脱することができる。従って、ソケット本体5及びインナー・ソケット7等の修理、点検、交換等を容易に行わせることができる。
[締結操作]
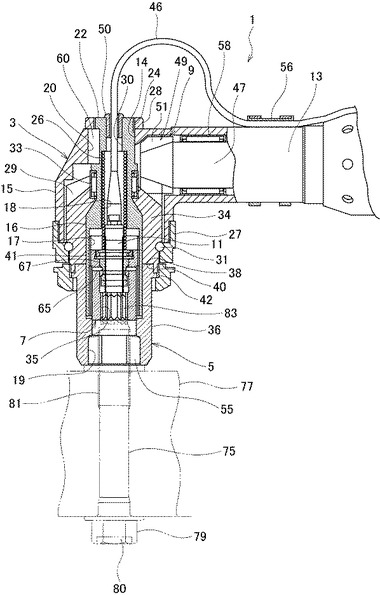
図3,図4は、締結操作を示し、図3は、軸力検知締結工具によりボルトを締結している状態の一部省略断面図、図2は、同要部拡大断面図である。
【0061】
図3,図4は、例えばボルト75、ナット55によってサスペンション・ストラットのボス部及びナックル・アーム等の締結対象77の締結を行う構成を示している。
【0062】
前記ボルト75は、一端に頭部79を有し、頭部79には、頭側基準面80が設けられている。雄ねじ部81側の先端には、回り止め用の係合部としてセレーションで形成されたピンテール83が設けられている。ボルト75の先端には、先端側基準面85が形成されている。ボルト75の先端外周に、凹部35への挿入を容易にする面取りを設けることもできる。ナット55は、雄ねじ部81に予め螺合させている。
【0063】
(正常挿入)
ナット55をボルト75に締め込むには、締結具1をボルト75に対して装着配置し、インナー・ソケット7の凹部35をピンテール83に嵌合させるように挿入しセレーション係合させる。このとき、ピンテール83側の面取り及び凹部3側の面取り35aにより凹部35のピンテール83に対する挿入を確実且つ容易にすることができる。
【0064】
この挿入により、超音波センサ11の先端がボルト75の先端側基準面85に当接して押圧される。
【0065】
超音波センサ11が押圧力を受けると、ロック部材67が当接部材63に当接するまでインナー・ソケット7に対し一定範囲で軸方向相対移動する。
【0066】
この移動によりロック部材67が同方向へ一体に移動し、ロック部材67の小径部67cがストッパ・ピン65の内端に対向する。この小径部67cによりストッパ・ピン65のインナー・ソケット7に対する没移動を許容することができる。
【0067】
当接部材63がロック部材67からさらに押圧力を受けると、当接部材63を介してインナー・ソケット7が力を受け、ナット嵌合部19に対しセンサ・スプリング45の付勢力に抗して退避移動する。
【0068】
この退避移動によりストッパ・ピン65の球状の外端がインナー・ソケット支持筒16のインナー・スプライン17端部に当接し、球状の外端の相対ガイドによりストッパ・ピン65がインナー・ソケット7の径方向内側へ没移動する。
【0069】
したがって、インナー・ソケット7のスプライン41がインナー・ソケット支持筒16のインナー・スプライン17に沿って移動し、インナー・ソケット7がナット嵌合部19内から退避移動する。
【0070】
この退避移動により、図3,図4のようにナット55がナット嵌合部19に嵌合する。
【0071】
このとき、センサ・スプリング45の付勢力がインナー・ソケット7を介して超音波センサ11にも作用するから超音波センサ11の先端をボルト75の先端側基準面85に正確に当接させることができる。
【0072】
締結具1がボルト75から離脱されると、センサ・スプリング45の付勢力によりインナー・ソケット7がナット嵌合部19側へ移動し、ストッパ・ピン65がインナー・スプライン17から外れた位置で超音波センサ11の相対移動によるロック部材67の連動によりテーパー部67bがストッパ・ピン65を突出付勢する。
【0073】
この突出付勢によりストッパ・ピン65がインナー・ソケット7の外周に突出し、インナー・ソケット挿通穴23の縁部に軸方向に係合してインナー・ソケット7のソケット本体5外への軸方向移動を阻止する。
【0074】
(誤挿入)
締結具1がボルト75に対して位置ずれし、凹部35がピンテール83に傾斜状態で挿入されるなど、後挿入が生じたとき、ボルト75の先端が超音波センサ11に当接する前にインナー・ソケット7が押圧力を受け、ボルト嵌合部19から退避移動しようとする。
【0075】
このとき、ロック部材67の大径部67aがストッパ・ピン65の内端に対向して該ストッパ・ピン65のインナー・ソケット7に対する没移動を阻止する。
【0076】
このため、ストッパ・ピン65はインナー・ソケット7の外周に突出した状態であり、ストッパ・ピン65の外端がインナー・ソケット支持筒16のインナー・スプライン17端部に当接してインナー・ソケット7の移動がロックされる。
【0077】
したがって、誤挿入時は、インナー・ソケット7のソケット本体5から突出した状態が維持され、ナット55をナット嵌合部19へ嵌合させることができず、後挿入を防止することができる。
【0078】
(締結)
前記正常挿入において、電動モータの駆動によって駆動軸47を回転駆動すると、この回転駆動によってベベル・ギヤ51,29を介し、ソケット本体5が回転駆動される。このときインナー・ソケット7は、工具本体3側のインナー・ソケット支持筒16に回転不能に支持されているため、インナー・ソケット7が静止し、その回りでソケット本体5のみが回転する。
【0079】
前記ソケット本体5の回転により、ナット嵌合部19を介しナット55が回転してボルト75に締め込まれる。このときボルト75は、ピンテール83がインナー・ソケット7の凹部35にセレーション係合することによって、工具本体3側に対し回り止めが行われる。従って、ソケット本体5の回転駆動によって、ボルト75の回り止めを行いながら、ナット55を確実に締め込むことができる。
【0080】
前記超音波センサ11が発信した超音波は、ボルト75の頭部79の頭側基準面80で反射し、該反射波が超音波センサ11によって受信される。この超音波の発信、受信により、コントローラは、超音波を発信させた時点から反射波を受信した時点までの経過時間を超音波がボルト75をその軸心長さ方向に往復するために必要な往復時間として求め、この往復時間からボルト75の軸心長さを求める。
【0081】
そして、ナット55の締め付けに伴うボルト75の軸心長さの伸び率を求め、この伸び率と比例関係にある軸力値を求めて、ディスプレイ等に出力する。作業者は、ディスプレイに表示された軸力値を見ることによって、表示された軸力値が設定値に達したとき、電動モータの回転を停止させる。或いは、コントローラの制御により予め設定した軸力値で電動モータを自動停止させる。この停止によりサスペンション・ストラットのボス部とナックル・アームとの間の締結等、締結対象77のボルト75、ナット55による締結を設定された軸力によって正確に行わせることができる。
[実施例の効果]
本発明実施例の軸力検知締結工具1は、先端外周に軸方向に沿う回転方向の係合部であるピンテール83を備えたボルト75に軸力を検知しながらナット55を締め込む軸力検知締結工具1であって、前記ナット55を嵌合させるナット嵌合部19を備えて工具本体3に回転可能に支持されナット嵌合部19に嵌合させたナット55を前記工具本体3に対して回り止めされた前記ボルト75に電動モータの回転駆動出力による軸回り回転で締め込み可能なソケット本体5と、前記ソケット本体5に対し同心状に形成された工具本体3側のインナー・ソケット支持筒16と、前記ソケット本体5及びインナー・ソケット支持筒16に同心状に配置されて前記ナット嵌合部19内に臨み前記インナー・ソケット支持筒16に対し回転不能且つ前記ナット嵌合部19内から退避移動するように軸方向可動支持され前記ボルト55のピンテール83を嵌合支持させ前記工具本体3に対して回り止め係止する凹部35を先端側内周に備えたインナー・ソケット7と、該インナー・ソケット7を前記インナー・ソケット支持筒16に対して付勢し前記ナット嵌合部19側に臨ませるセンサ・スプリング45と、前記インナー・ソケット7の軸心部に軸心方向に一定範囲で可動支持され前記インナー・ソケット支持筒16側で前記ボルト75の先端に当接し出入力した超音波を前記ボルト75の軸力検出に用いるための超音波センサ11と、前記インナー・ソケット7に径方向へ可動支持され該インナー・ソケット7の外周に対し出没可能でインナー・ソケット7の外周側への突出位置で前記インナー・ソケット支持筒16に軸方向に係合し前記ソケット本体5に対する前記インナー・ソケット7の軸方向移動を阻止するストッパ・ピン65と、前記超音波センサ11側に設けられ該超音波センサ11が前記インナー・ソケット支持筒16側に臨んだ位置で前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65の没移動を阻止し前記超音波センサ11が前記インナー・ソケット支持筒16から前記一定範囲で前記インナー・ソケット7に対し軸方向へ退避移動すると前記ストッパ・ピン65の没移動を許容するロック部材67とを備えた。
【0082】
このため、ソケット本体5の軸回り回転によりボルト75に対しナット55を締め込むとき、超音波センサ11とボルト75とが相対回転せず、超音波センサ11の破損を抑制し、耐久性を向上させることができる。
【0083】
前記超音波センサ11は、センサ・スプリング45の付勢力によりボルト75の先端側基準面85に正確に弾接することができ、正確な軸力検知を行わせることができる。
【0084】
前記ナット55の締め込みに際し、ボルト75先端がナット55に対し超音波センサ11側に相対的に突出しても、超音波センサ11がセンサ・スプリング45の付勢力に抗して工具本体3側に後退することができ、軸力検知を行いながらボルト75に対してナット55を無理なく締め込むことができる。
【0085】
前記超音波センサ11は、工具本体3側に支持されているため、工具本体3側から超音波センサ11に対しスリップ・リングを介すことなく直接的に配線を行うことができ、耐久性を向上させることができる。
【0086】
前記工具本体3側とソケット本体5側との間に他の静止部材が介在することがないため、ナット55が狭い空間の奥まった箇所に位置している場合でも、工具本体3を持つことによってソケット本体5先端側を狭い箇所に挿入し、そのナット嵌合部19にナット55を嵌合させて容易に締結作業及び軸力検知を行わせることができ、作業性を大幅に向上させることができる。
【0087】
しかも、超音波センサ11が前記凹部35側に臨んだ位置でロック部材67が前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65の没移動を阻止するから、超音波センサ11がインナー・ソケット7の凹部35から軸方向へ退避移動しようとするとき、ロック部材67がインナー・ソケット7の外周側への突出位置で工具本体3側のインナー・ソケット支持筒16に係合してインナー・ソケット7の退避移動が阻止される。
【0088】
このため、ボルト55の先端がインナー・ソケット7に正常に嵌合しない誤挿入時には、ナット嵌合部19内にインナー・ソケット7が臨んだ状態が維持されることでナット嵌合部19に対するナット55の嵌合を規制し、誤挿入を知らせることができる。
【0089】
ボルト55の先端がインナー・ソケット7に正常に嵌合してピンテール83が凹部35に嵌入されると、ボルト75の先端から力を受けて超音波センサ11が軸方向へ退避移動し、ロック部材67がストッパ・ピン65の没移動を許容する状態となる。
【0090】
したがって、インナー・ソケット7が工具本体3側のインナー・ソケット支持筒16に軸方向に当接して径方向内側への力を受け、ストッパ・ピン65がインナー・ソケット7の径方向内側へ没移動する。
【0091】
このため、インナー・ソケット7がソケット本体5のナット嵌合部19から軸方向へ退避移動し、ナット嵌合部19へナッ55トを正常に嵌合させることができる。この嵌合により、ボルト75を回り止めしながらナット55を締結し、超音波センサ11により軸力を検知しつつ締結を完了させることができる。
【図面の簡単な説明】
【0092】
【図1】軸力検知締結工具の一部省略断面図である。(実施例1)
【図2】軸力検知締結工具の要部拡大断面図である。(実施例1)
【図3】締結操作を示す軸力検知締結工具の一部省略断面図である。(実施例1)
【図4】締結操作を示す軸力検知締結工具の要部拡大断面図である。(実施例1)
【図5】軸力検知締結工具によりボルトを締結している状態を示す断面図である。(従来例)
【符号の説明】
【0093】
1 軸力検知締結工具
3 工具本体
5 ソケット本体
7 インナー・ソケット
9 駆動伝達機構
11 超音波センサ
16 インナー・ソケット支持筒(支持部)
17 インナー・スプライン
19 ナット嵌合部
45 センサ・スプリング(付勢部材)
55 ナット
65 ストッパ・ピン(ストッパ部材)
67 カム部材(ロック部材)
75 ボルト
83 ピンテール
35 凹部(係止部)
37 インナー・セレーション(係止部)
41 雄スプライン
43A,43B,43C ソケット・スプリング(ソケット付勢部材)
45 センサ・スプリング(付勢部材)
45A,45C クッション・ゴム(付勢部材)
45B コイル・スプリング(付勢部材)
46 リード線(配線)
47 駆動軸
49 ベベル・ギヤ機構
51 ベベル・ギヤ
55 ナット
61 頭部
69 先端側基準面
71 軸線
73 傾斜面
75 頭側基準面
83 ピンテール(係合部)
【技術分野】
【0001】
本発明は、自動車のサスペンション等のボルト・ナットの締結に供される軸力検知締結工具に関する。
【背景技術】
【0002】
従来の軸力検知締結工具としては、例えば図5に示すようなものがある。
【0003】
図5の締結工具は、測定用ソケット201がトルク・レンチ203に着脱自在に装着されたものである。測定用ソケット201は、ソケット本体205と、静止部材207とを備えている。ソケット本体105は、静止部材107に対し相対回転可能となっている。ソケット本体205には、ボルト嵌合穴209が設けられている。ボルト嵌合穴209は、ボルト211の頭部212に嵌合する構成となっている。ボルト嵌合穴209の奥側には、超音波センサ213が収容配置されている。
【0004】
前記超音波センサ213は、永久磁石で形成された本体214に圧電素子115を取り付けたものである。圧電素子215は、前記ボルト頭部212に直接当接する構成となっている。圧電素子215にはリード線217が接続され、リード線217はスリップ・リング219の一方の端子に接続されている。スリップ・リング219の他方の端子には、前記静止部材207に支持された同軸ケーブル221が接続されている。
【0005】
前記トルク・レンチ203は、駆動軸223とラチェット機構225とがベベル・ギヤ227,229の噛み合いによって回転連動する構成となっている。ラチェット機構225に連動するシャフト部231がソケット本体205の上端に嵌合し、ピン233によって結合されている。
【0006】
ボルト締結に際し、前記ソケット本体205のボルト嵌合穴209をボルト211の頭部212に嵌合させると、頭部212が永久磁石の本体214に吸着され圧電素子215を頭部212上面に当接させることができる。
【0007】
次いで、前記駆動軸223を回転駆動するとベベル・ギヤ227,229、ラチェット機構225を介してシャフト部231が回転駆動される。シャフト部231の回転によってソケット本体205が連動し、静止部材207に対して回転する。ソケット本体205の回転によって、ボルト211の頭部212が回転力を受けボルト211がブロック235に対し締め込まれ、被締結物237が締結される。
【0008】
このとき、前記ボルト211による締結力は、ボルト211の軸力管理によって行われる。すなわち、コントローラの制御により圧電素子215から超音波を発信させると、ボルト211の先端で反射した反射波を圧電素子215が受信する。コントローラは、前記超音波を発信した時点から反射波を受信した時点までの経過時間を、超音波がボルト211をその軸心長さ方向に往復するために必要な往復時間として求め、この往復時間からボルト111の軸心長さを求める。そして、締め付けに伴うボルト211の軸心長さの伸び率を求め、さらにこの伸び率と比例関係にある軸力値を求め、この軸力値が設定値になったときに、ボルト211の締結を完了することができる。従って、ボルト211の軸力に応じた正確な締結を行うことができる。
【0009】
しかしながら、上記の構造では、ボルト211をブロック135等に直接締結する場合に用いることはできるが、ボルト211にナットを締め込む作業では、ソケット本体205をナットに嵌合させて締め込んでもボルト211が共回りしてしまい、軸力検知締結工具を片手で持ち軸力を測定しながらナットを締め込む作業を行うことは全くできなくなる。
【0010】
前記ボルト211にナットを締め込む作業において、前記ボルトが例えば植え込みボルトの様な場合にはボルトの供回りを起こさずにナットを締め込むことは可能である。しかしこの場合は、ナットを締め込む過程においてボルト先端と圧電素子215とが相対回転する構造となり、圧電素子215の破損を招きやすく、ボルト軸力を測定しながらナットを締め込む作業を行うことは結果的に困難であった。
【0011】
また、ボルトにナットを締め込むと、ナットに対してボルト先端が締め込みに応じて突出するため、図5のように、ソケット本体205に超音波センサ213を固定的に設けたものではボルト先端の超音波センサ213側への突出に対応することができない。
【0012】
さらに、永久磁石で形成された本体214に圧電素子215を固定的に取り付けているため、本体214がボルト211の頭部212に当接する面と圧電素子215がボルト211の頭部212に当接する面とを正確に面合わせしないと本体214は頭部212に正確に当接するが圧電素子215は正確に当接することができなくなる恐れがあり、本体214と圧電素子215との組付けが極めて煩雑且つ困難なものになる恐れがある。
【0013】
また、ソケット本体205に対し超音波センサ213が固定的に取り付けられているため、圧電素子215とコントローラ側との信号伝達を相対回転するソケット本体205及び静止部材207間で行わなければならず、リード線217と同軸ケーブル221とをスリップ・リング219で接続する構造となり、構造が複雑になると共にスリップ・リング219での耐久性が低いという問題がある。
【0014】
加えて、静止部材207がソケット本体205とトルク・レンチ203との間に存在しているため、例えば車両の組み立て工程において、サスペンションスラットとナックル・アームとの締結等、奥まった箇所のナットの締め込みを行う場合に、ソケット本体205を奥まった箇所に挿入しようとしても静止部材207の存在によってそれほど奧まで挿入することができず、作業が困難となるか限界を招く恐れがある。
【0015】
これに対し、ボルトの先端外周にセレーションなどにより軸方向に沿った回転方向の係合部としてピン・テールを形成し、ボルトの軸力を検知しながらこのボルトにナットを締め込み可能な軸力検知締結工具を本出願人は既に提案している。
【0016】
この軸力検知締結工具では、ボルトの係合部であるピン・テールに工具のインナー・ソケットの係支部を正確に嵌合させることでボルト先端に超音波センサを当接させるようにしている。この状態でボルトはインナー・ソケットを介して工具側に回り止めされる。このボルトに螺合し工具のソケット本体に設けられたナット嵌合部に嵌合するナットが、電動モータにより回転駆動されるソケット本体の回転によりボルトに締結される。このとき、ボルトの先端に当接する超音波センサが出力した超音波がボルト頭部の面で反射されて超音波センサに入力され、ボルトの軸力検出を行わせることができる。
【0017】
このような軸力検知締結工具では、ボルトのピン・テールをインナー・ソケットに正確に嵌合させることが課題となる。
【0018】
【特許文献1】特開2000−74764号公報
【特許文献2】特開2005−279920号公報
【発明の開示】
【発明が解決しようとする課題】
【0019】
解決しようとする問題点は、ボルトに対しナットを締結しながらボルト軸力を測定する軸力検知締結工具では、ボルトの係合部をインナー・ソケットに正確に嵌合させることが肝要となる点である。
【課題を解決するための手段】
【0020】
本発明は、ボルトの係合部をインナー・ソケットに正確に嵌合させるために、先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、前記ソケット本体に対し同心状に形成された工具本体側の支持部と、前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材とを備えたことを最も主要な特徴とする。
【発明の効果】
【0021】
本発明の軸力検知締結工具は、先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、前記ソケット本体に対し同心状に形成された工具本体側の支持部と、前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材とを備えた。
【0022】
このため、ソケット本体の軸回り回転によりボルトに対しナットを締め込むとき、超音波センサとボルトとが相対回転せず、超音波センサの破損を抑制し、耐久性を向上させることができる。
【0023】
前記超音波センサは、付勢部材の付勢力によりボルトの先端に正確に弾接することができ、正確な軸力検知を行わせることができる。
【0024】
前記ナットの締め込みに際し、ボルト先端がナットに対し超音波センサ側に相対的に突出しても、超音波センサが付勢部材の付勢力に抗して工具本体側に後退することができ、軸力検知を行いながらボルトに対してナットを無理なく締め込むことができる。
【0025】
前記超音波センサは、工具本体側に支持されているため、工具本体側から超音波センサに対しスリップ・リングを介すことなく直接的に配線を行うことができ、耐久性を向上させることができる。
【0026】
前記工具本体側とソケット本体側との間に他の静止部材が介在することがないため、ナットが狭い空間の奥まった箇所に位置している場合でも、工具本体を持つことによってソケット本体先端側を狭い箇所に挿入し、そのナット嵌合部にナットを嵌合させて容易に締結作業及び軸力検知を行わせることができ、作業性を大幅に向上させることができる。
【0027】
しかも、超音波センサが前記係止部側に臨んだ位置でロック部材が前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止するから、超音波センサがインナー・ソケットの係止部から軸方向へ退避移動しようとするとき、ストッパ部材がインナー・ソケットの外周側への突出位置で工具本体側の支持部に係合してインナー・ソケットの退避移動が阻止される。
【0028】
このため、ボルトの先端がインナー・ソケットに正常に嵌合しない誤挿入時には、ナット嵌合部内にインナー・ソケットが臨んだ状態が維持されることでナット嵌合部に対するナットの嵌合を規制し、誤挿入を知らせることができる。
【0029】
ボルトの先端がインナー・ソケットに正常に嵌合して係合部が係止部に嵌入されると、ボルトの先端から力を受けて超音波センサが軸方向へ退避移動し、ロック部材がストッパ部材の没移動を許容する状態となる。
【0030】
したがって、インナー・ソケットがボルトから押圧力を受けるとストッパ部材が工具本体側の支持部に軸方向に当接して径方向内側への力を受け、ストッパ部材がインナー・ソケットの径方向内側へ没移動する。
【0031】
このため、インナー・ソケットがソケット本体のナット嵌合部から軸方向へ退避移動し、ナット嵌合部へナットを正常に嵌合させることができる。この嵌合により、ボルトを回り止めしながらナットを締結し、超音波センサにより軸力を検知しつつ締結を完了させることができる。
【発明を実施するための最良の形態】
【0032】
ボルトに対しナットを締結しながらボルト軸力を測定する軸力検知締結工具であって、ボルトの係合部をインナー・ソケットに正確に嵌合させるという目的を、インナー・ソケットに設けたストッパ部材と超音波センサに設けたロック部材とにより実現した。
【実施例1】
【0033】
図1は、本発明の実施例1に係る軸力検知締結工具の一部省略断面図、図2は、同要部拡大断面図である。
【0034】
図1,図2のように、軸力検知締結工具1は、工具本体3と、ソケット本体5と、インナー・ソケット7と、回転アクチュエータである電動モータの回転を伝達する駆動伝達機構9と、超音波センサ11とからなっている。
【0035】
前記工具本体3は、中空のレバー部13と、中空のレバー・ヘッド15とが一体に形成されたものである。前記レバー部13は中空に形成され、作業者が片手で把持できるようになっている。レバー部13の図外の端部には、前記電動モータが取り付けられている。
【0036】
前記レバー・ヘッド15は、その軸心がレバー部13の軸心に対して直交し、軸心部に工具本体3側の支持部としてインナー・ソケット支持筒16が同心状に着脱可能に固定されている。
【0037】
前記レバー・ヘッド15には、支持筒取付穴14が設けられている。支持筒取付穴14には、キー溝20が設けられている。
【0038】
前記インナー・ソケット支持筒16は、取付端22に雄ねじ部24とキー溝26とが設けられている。取付端22は、前記レバー・ヘッド15の支持筒取付穴14に挿入され、ナット28により固定されると共に、キー溝20,26に嵌合するキー60で回り止めがなされている。
【0039】
前記インナー・ソケット支持筒16の先端側内周には、軸心方向に沿ったインナー・スプライン17が設けられている。インナー・ソケット支持筒16の奥側には、スプリング支持穴18が設けられている。スプリング支持穴18は、貫通孔30を介して前記取付端22外に連通している。
【0040】
前記ソケット本体5は、前記工具本体3のレバー・ヘッド15に回転可能に支持されている。ソケット本体5は、回転連動部34とナット駆動部36とからなっている。
【0041】
前記回転連動部34には、係合穴38が設けられている。係合穴38は、例えば断面六角穴で構成されている。前記ナット駆動部36には、係合端部40が設けられている。係合端部40は、前記係合穴38に対応して断面六角に形成されている。前記係合端部に隣接してナット駆動部36には、係合フランジ42が設けられている。前記回転連動部34の係合穴38に前記ナット駆動部36の係合端部40が嵌合し、回転連動部34に螺合するナット部材44により前記係合フランジ42が締結力を受け、回転連動部34にナット駆動部36が相対回転不能に締結結合されている。
【0042】
前記ナット駆動部36の端部にナット55に嵌合させるためのナット嵌合部19が形成されている。ナット嵌合部19は、例えば六角ナットに対応して嵌合できるように、断面六角に形成されている。前記ナット嵌合部19の奧壁21には、断面円形のインナー・ソケット挿通穴23が設けられ、奥壁21に隣接して前記インナー・ソケット挿通穴23に連通する嵌合軸穴25が設けられている。嵌合軸穴25は、前記インナー・ソケット支持筒16の外周囲に嵌合し、ナット駆動部36は、インナー・ソケット支持筒16に対し相対回転可能となっている。
【0043】
前記回転連動部34は、前記ナット駆動部36の嵌合軸穴25と同径の嵌合軸穴48を有し、該嵌合軸穴48が前記インナー・ソケット支持筒16の外周囲に嵌合し、回転連動部34は、インナー・ソケット支持筒16に対し相対回転可能となっている。回転連動部34は、外周側が前記レバー・ヘッド15に螺合するキャップ27に軸受31によって回転自在に支持されている。回転連動部34の内周側は、ニードル・ベアリング33によってインナー・ソケット支持筒16の取付端22側に回転自在に支持されている。前記回転連動部34の基部側の端部には、回転連動用のベベル・ギヤ29が設けられている。
【0044】
前記インナー・ソケット7は、断面円形に形成され、前記ソケット本体5及びインナー・ソケット支持筒16内に同心状に配置され、工具本体3側のインナー・ソケット支持筒16に対して回転不能且つ軸方向可動支持されていると共に、ボルト先端の回り止め用の係合部を係止する係止部としてインナー・セレーション37を有している。すなわち、インナー・ソケット7の先端には、前記係止部を構成する凹部35が設けられている。凹部35の内周面に、インナー・セレーション37が設けられ、凹部35の開口端にピンテールの挿入を容易にする面取り35aが設けられている。
【0045】
前記インナー・ソケット7の軸心部には、センサ挿通穴39が貫通形成されている。インナー・ソケット7は、前記インナー・ソケット挿通穴23から前記ナット嵌合部19内へ臨み、その先端がナット嵌合部19外へ突出している。インナー・ソケット7の基端部には、スプライン41が設けられている。スプライン41は、前記インナー・ソケット支持筒16のインナー・スプライン17にスプライン嵌合している。このスプライン嵌合により、インナー・ソケット7は、インナー・ソケット支持筒16に対し、回転不能、且つ、ナット嵌合部19から退避移動するように軸心方向へ可動支持されている。
【0046】
前記インナー・ソケット7の軸心部のセンサ挿通穴39に、前記超音波センサ11が挿通され、軸心方向へ一定範囲で可動支持されている。超音波センサ11の先端は、インナー・ソケット7の凹部35内に臨んでいる。この超音波センサ11は、ボルト先端に当接した状態で超音波を出入力し、ボルトの軸力検出に用いるものである。
【0047】
前記インナー・ソケット7の基端面には、ねじ穴52が設けられ、ばね座54を支持した取付座61が螺合して取り付けられている。ねじ穴52の奥側に当接部材63が配置され、取付座61によりインナー・ソケット7に対して締結固定されている。
【0048】
ばね座54とインナー・ソケット支持筒16のスプリング支持穴18との間には、付勢部材としてセンサ・スプリング45が介設されている。
【0049】
センサ・スプリング45によりインナー・ソケット支持筒16に対してインナー・ソケット7を付勢し前記ナット嵌合部19側に臨ませる。また、センサ・スプリング45によって、インナー・ソケット7を介し超音波センサ11がナット嵌合部19側へ向けて付勢される構成となっている。
【0050】
前記インナー・ソケット7には、ストッパ部材としてのストッパ・ピン65が径方向へ可動支持されている。ストッパ・ピン65は、両端が球面を成し、インナー・ソケット7の周方向へ所定間隔で複数備えられている。
【0051】
このストッパ・ピン65は、インナー・ソケット7の外周に対し出没可能でインナー・ソケット7外周側への突出位置で前記インナー・ソケット支持筒16のインナー・スプライン17下端に軸方向に係合し前記ソケット本体5に対する前記インナー・ソケット7の軸方向移動を阻止する。
【0052】
また、ストッパ・ピン65は、ソケット本体5のインナー・ソケット挿通穴23の縁部に軸方向に係合して該ソケット本体5に対する前記インナー・ソケット7のソケット本体5外への軸方向移動を阻止する。
【0053】
前記超音波センサ11には、雄ねじ部11aが設けられ、ロック部材67が螺合固定されている。ロック部材67には、外周面に大径部67a,テーパー部67b、小径部67cが備えられている。
【0054】
この超音波センサ11側に設けられたロック部材67は、該超音波センサ11が凹部35側に臨んだ位置で大径部67aが前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65のインナー・ソケット7に対する没移動を阻止する。前記超音波センサ11が前記凹部35から一定範囲で前記インナー・ソケット7に対し軸方向へ退避移動するとロック部材67の小径部67cが前記ストッパ・ピン65の内端に対向し、ストッパ・ピン65のインナー・ソケット7に対する没移動を許容することができる。
【0055】
超音波センサ11のインナー・ソケット7に対する一定範囲での退避移動は、ロック部材67が当接部材63に当接するまでの範囲となる。
【0056】
超音波センサ11の先端側には、スペーサ69を介してナット71、ロック・ナット73が締結されている。
【0057】
前記超音波センサ11の配線であるリード線46は、前記センサ・スプリング45の内側を通って、スプリング支持穴18側に延設され、スプリング支持穴18から貫通孔30に取り付けられたグロメット54を貫通してレバー・ヘッド15外部に引き出され、軸力演算用の図外のコントローラに接続されている。リード線46は、レバー部13外面に複数箇所で固定バンド56により支持されている。
【0058】
前記駆動伝達機構9は、駆動軸47と、ベベル・ギヤ機構49とからなっている。駆動軸47は、前記工具本体3のレバー部13内に沿って配置され、ニードル・ベアリング58等によりレバー部13に回転可能に支持されている。駆動軸47は、前記電動モータにより回転駆動される構成となっている。
【0059】
前記ベベル・ギヤ機構49は、駆動軸47と前記ソケット本体5との間に設けられ、噛み合いにより駆動軸47の回転をソケット本体5に伝達するものである。ベベル・ギヤ機構49は、前記ソケット本体5のベベル・ギヤ29と、駆動軸47の端部に設けられたベベル・ギヤ51とからなり、ベベル・ギヤ29,51相互が噛み合っている。
【0060】
前記軸力検知締結工具1は、前記ナット28の締結を外すと共に、レバー・ヘッド15に対するキャップ27の螺合を外すことで、インナー・ソケット支持筒16、ソケット本体5、及びインナー・ソケット7をユニットとして着脱することができる。従って、ソケット本体5及びインナー・ソケット7等の修理、点検、交換等を容易に行わせることができる。
[締結操作]
図3,図4は、締結操作を示し、図3は、軸力検知締結工具によりボルトを締結している状態の一部省略断面図、図2は、同要部拡大断面図である。
【0061】
図3,図4は、例えばボルト75、ナット55によってサスペンション・ストラットのボス部及びナックル・アーム等の締結対象77の締結を行う構成を示している。
【0062】
前記ボルト75は、一端に頭部79を有し、頭部79には、頭側基準面80が設けられている。雄ねじ部81側の先端には、回り止め用の係合部としてセレーションで形成されたピンテール83が設けられている。ボルト75の先端には、先端側基準面85が形成されている。ボルト75の先端外周に、凹部35への挿入を容易にする面取りを設けることもできる。ナット55は、雄ねじ部81に予め螺合させている。
【0063】
(正常挿入)
ナット55をボルト75に締め込むには、締結具1をボルト75に対して装着配置し、インナー・ソケット7の凹部35をピンテール83に嵌合させるように挿入しセレーション係合させる。このとき、ピンテール83側の面取り及び凹部3側の面取り35aにより凹部35のピンテール83に対する挿入を確実且つ容易にすることができる。
【0064】
この挿入により、超音波センサ11の先端がボルト75の先端側基準面85に当接して押圧される。
【0065】
超音波センサ11が押圧力を受けると、ロック部材67が当接部材63に当接するまでインナー・ソケット7に対し一定範囲で軸方向相対移動する。
【0066】
この移動によりロック部材67が同方向へ一体に移動し、ロック部材67の小径部67cがストッパ・ピン65の内端に対向する。この小径部67cによりストッパ・ピン65のインナー・ソケット7に対する没移動を許容することができる。
【0067】
当接部材63がロック部材67からさらに押圧力を受けると、当接部材63を介してインナー・ソケット7が力を受け、ナット嵌合部19に対しセンサ・スプリング45の付勢力に抗して退避移動する。
【0068】
この退避移動によりストッパ・ピン65の球状の外端がインナー・ソケット支持筒16のインナー・スプライン17端部に当接し、球状の外端の相対ガイドによりストッパ・ピン65がインナー・ソケット7の径方向内側へ没移動する。
【0069】
したがって、インナー・ソケット7のスプライン41がインナー・ソケット支持筒16のインナー・スプライン17に沿って移動し、インナー・ソケット7がナット嵌合部19内から退避移動する。
【0070】
この退避移動により、図3,図4のようにナット55がナット嵌合部19に嵌合する。
【0071】
このとき、センサ・スプリング45の付勢力がインナー・ソケット7を介して超音波センサ11にも作用するから超音波センサ11の先端をボルト75の先端側基準面85に正確に当接させることができる。
【0072】
締結具1がボルト75から離脱されると、センサ・スプリング45の付勢力によりインナー・ソケット7がナット嵌合部19側へ移動し、ストッパ・ピン65がインナー・スプライン17から外れた位置で超音波センサ11の相対移動によるロック部材67の連動によりテーパー部67bがストッパ・ピン65を突出付勢する。
【0073】
この突出付勢によりストッパ・ピン65がインナー・ソケット7の外周に突出し、インナー・ソケット挿通穴23の縁部に軸方向に係合してインナー・ソケット7のソケット本体5外への軸方向移動を阻止する。
【0074】
(誤挿入)
締結具1がボルト75に対して位置ずれし、凹部35がピンテール83に傾斜状態で挿入されるなど、後挿入が生じたとき、ボルト75の先端が超音波センサ11に当接する前にインナー・ソケット7が押圧力を受け、ボルト嵌合部19から退避移動しようとする。
【0075】
このとき、ロック部材67の大径部67aがストッパ・ピン65の内端に対向して該ストッパ・ピン65のインナー・ソケット7に対する没移動を阻止する。
【0076】
このため、ストッパ・ピン65はインナー・ソケット7の外周に突出した状態であり、ストッパ・ピン65の外端がインナー・ソケット支持筒16のインナー・スプライン17端部に当接してインナー・ソケット7の移動がロックされる。
【0077】
したがって、誤挿入時は、インナー・ソケット7のソケット本体5から突出した状態が維持され、ナット55をナット嵌合部19へ嵌合させることができず、後挿入を防止することができる。
【0078】
(締結)
前記正常挿入において、電動モータの駆動によって駆動軸47を回転駆動すると、この回転駆動によってベベル・ギヤ51,29を介し、ソケット本体5が回転駆動される。このときインナー・ソケット7は、工具本体3側のインナー・ソケット支持筒16に回転不能に支持されているため、インナー・ソケット7が静止し、その回りでソケット本体5のみが回転する。
【0079】
前記ソケット本体5の回転により、ナット嵌合部19を介しナット55が回転してボルト75に締め込まれる。このときボルト75は、ピンテール83がインナー・ソケット7の凹部35にセレーション係合することによって、工具本体3側に対し回り止めが行われる。従って、ソケット本体5の回転駆動によって、ボルト75の回り止めを行いながら、ナット55を確実に締め込むことができる。
【0080】
前記超音波センサ11が発信した超音波は、ボルト75の頭部79の頭側基準面80で反射し、該反射波が超音波センサ11によって受信される。この超音波の発信、受信により、コントローラは、超音波を発信させた時点から反射波を受信した時点までの経過時間を超音波がボルト75をその軸心長さ方向に往復するために必要な往復時間として求め、この往復時間からボルト75の軸心長さを求める。
【0081】
そして、ナット55の締め付けに伴うボルト75の軸心長さの伸び率を求め、この伸び率と比例関係にある軸力値を求めて、ディスプレイ等に出力する。作業者は、ディスプレイに表示された軸力値を見ることによって、表示された軸力値が設定値に達したとき、電動モータの回転を停止させる。或いは、コントローラの制御により予め設定した軸力値で電動モータを自動停止させる。この停止によりサスペンション・ストラットのボス部とナックル・アームとの間の締結等、締結対象77のボルト75、ナット55による締結を設定された軸力によって正確に行わせることができる。
[実施例の効果]
本発明実施例の軸力検知締結工具1は、先端外周に軸方向に沿う回転方向の係合部であるピンテール83を備えたボルト75に軸力を検知しながらナット55を締め込む軸力検知締結工具1であって、前記ナット55を嵌合させるナット嵌合部19を備えて工具本体3に回転可能に支持されナット嵌合部19に嵌合させたナット55を前記工具本体3に対して回り止めされた前記ボルト75に電動モータの回転駆動出力による軸回り回転で締め込み可能なソケット本体5と、前記ソケット本体5に対し同心状に形成された工具本体3側のインナー・ソケット支持筒16と、前記ソケット本体5及びインナー・ソケット支持筒16に同心状に配置されて前記ナット嵌合部19内に臨み前記インナー・ソケット支持筒16に対し回転不能且つ前記ナット嵌合部19内から退避移動するように軸方向可動支持され前記ボルト55のピンテール83を嵌合支持させ前記工具本体3に対して回り止め係止する凹部35を先端側内周に備えたインナー・ソケット7と、該インナー・ソケット7を前記インナー・ソケット支持筒16に対して付勢し前記ナット嵌合部19側に臨ませるセンサ・スプリング45と、前記インナー・ソケット7の軸心部に軸心方向に一定範囲で可動支持され前記インナー・ソケット支持筒16側で前記ボルト75の先端に当接し出入力した超音波を前記ボルト75の軸力検出に用いるための超音波センサ11と、前記インナー・ソケット7に径方向へ可動支持され該インナー・ソケット7の外周に対し出没可能でインナー・ソケット7の外周側への突出位置で前記インナー・ソケット支持筒16に軸方向に係合し前記ソケット本体5に対する前記インナー・ソケット7の軸方向移動を阻止するストッパ・ピン65と、前記超音波センサ11側に設けられ該超音波センサ11が前記インナー・ソケット支持筒16側に臨んだ位置で前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65の没移動を阻止し前記超音波センサ11が前記インナー・ソケット支持筒16から前記一定範囲で前記インナー・ソケット7に対し軸方向へ退避移動すると前記ストッパ・ピン65の没移動を許容するロック部材67とを備えた。
【0082】
このため、ソケット本体5の軸回り回転によりボルト75に対しナット55を締め込むとき、超音波センサ11とボルト75とが相対回転せず、超音波センサ11の破損を抑制し、耐久性を向上させることができる。
【0083】
前記超音波センサ11は、センサ・スプリング45の付勢力によりボルト75の先端側基準面85に正確に弾接することができ、正確な軸力検知を行わせることができる。
【0084】
前記ナット55の締め込みに際し、ボルト75先端がナット55に対し超音波センサ11側に相対的に突出しても、超音波センサ11がセンサ・スプリング45の付勢力に抗して工具本体3側に後退することができ、軸力検知を行いながらボルト75に対してナット55を無理なく締め込むことができる。
【0085】
前記超音波センサ11は、工具本体3側に支持されているため、工具本体3側から超音波センサ11に対しスリップ・リングを介すことなく直接的に配線を行うことができ、耐久性を向上させることができる。
【0086】
前記工具本体3側とソケット本体5側との間に他の静止部材が介在することがないため、ナット55が狭い空間の奥まった箇所に位置している場合でも、工具本体3を持つことによってソケット本体5先端側を狭い箇所に挿入し、そのナット嵌合部19にナット55を嵌合させて容易に締結作業及び軸力検知を行わせることができ、作業性を大幅に向上させることができる。
【0087】
しかも、超音波センサ11が前記凹部35側に臨んだ位置でロック部材67が前記ストッパ・ピン65の内端に対向して該ストッパ・ピン65の没移動を阻止するから、超音波センサ11がインナー・ソケット7の凹部35から軸方向へ退避移動しようとするとき、ロック部材67がインナー・ソケット7の外周側への突出位置で工具本体3側のインナー・ソケット支持筒16に係合してインナー・ソケット7の退避移動が阻止される。
【0088】
このため、ボルト55の先端がインナー・ソケット7に正常に嵌合しない誤挿入時には、ナット嵌合部19内にインナー・ソケット7が臨んだ状態が維持されることでナット嵌合部19に対するナット55の嵌合を規制し、誤挿入を知らせることができる。
【0089】
ボルト55の先端がインナー・ソケット7に正常に嵌合してピンテール83が凹部35に嵌入されると、ボルト75の先端から力を受けて超音波センサ11が軸方向へ退避移動し、ロック部材67がストッパ・ピン65の没移動を許容する状態となる。
【0090】
したがって、インナー・ソケット7が工具本体3側のインナー・ソケット支持筒16に軸方向に当接して径方向内側への力を受け、ストッパ・ピン65がインナー・ソケット7の径方向内側へ没移動する。
【0091】
このため、インナー・ソケット7がソケット本体5のナット嵌合部19から軸方向へ退避移動し、ナット嵌合部19へナッ55トを正常に嵌合させることができる。この嵌合により、ボルト75を回り止めしながらナット55を締結し、超音波センサ11により軸力を検知しつつ締結を完了させることができる。
【図面の簡単な説明】
【0092】
【図1】軸力検知締結工具の一部省略断面図である。(実施例1)
【図2】軸力検知締結工具の要部拡大断面図である。(実施例1)
【図3】締結操作を示す軸力検知締結工具の一部省略断面図である。(実施例1)
【図4】締結操作を示す軸力検知締結工具の要部拡大断面図である。(実施例1)
【図5】軸力検知締結工具によりボルトを締結している状態を示す断面図である。(従来例)
【符号の説明】
【0093】
1 軸力検知締結工具
3 工具本体
5 ソケット本体
7 インナー・ソケット
9 駆動伝達機構
11 超音波センサ
16 インナー・ソケット支持筒(支持部)
17 インナー・スプライン
19 ナット嵌合部
45 センサ・スプリング(付勢部材)
55 ナット
65 ストッパ・ピン(ストッパ部材)
67 カム部材(ロック部材)
75 ボルト
83 ピンテール
35 凹部(係止部)
37 インナー・セレーション(係止部)
41 雄スプライン
43A,43B,43C ソケット・スプリング(ソケット付勢部材)
45 センサ・スプリング(付勢部材)
45A,45C クッション・ゴム(付勢部材)
45B コイル・スプリング(付勢部材)
46 リード線(配線)
47 駆動軸
49 ベベル・ギヤ機構
51 ベベル・ギヤ
55 ナット
61 頭部
69 先端側基準面
71 軸線
73 傾斜面
75 頭側基準面
83 ピンテール(係合部)
【特許請求の範囲】
【請求項1】
先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、
前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、
前記ソケット本体に対し同心状に形成された工具本体側の支持部と、
前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、
該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、
前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、
前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、
前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材と、
を備えたことを特徴とする軸力検知締結工具。
【請求項2】
請求項1記載の軸力検知締結工具において、
前記ストッパ部材は、前記ソケット本体に軸方向に係合して該ソケット本体に対する前記インナー・ソケットのソケット本体外への軸方向移動を阻止する、
ことを特徴とする軸力検知締結工具。
【請求項3】
請求項1又は2記載の軸力検知締結工具において、
前記ストッパ部材は、前記インナー・ソケットの周方向へ所定間隔で複数備えられたストッパ・ピンである、
ことを特徴とする軸力検知締結工具。
【請求項4】
請求項2記載の軸力検知締結工具において、
前記ロック部材は、前記超音波センサに固定され外周面に大径部とテーパー部と小径部とを備えた、
ことを特徴とする軸力検知締結工具。
【請求項1】
先端外周に軸方向に沿う回転方向の係合部を備えたボルトに軸力を検知しながらナットを締め込む軸力検知締結工具であって、
前記ナットを嵌合させるナット嵌合部を備えて工具本体に回転可能に支持され該ナット嵌合部に嵌合させたナットを前記工具本体に対して回り止めされた前記ボルトに回転アクチュエータの回転駆動出力による軸回り回転で締め込み可能なソケット本体と、
前記ソケット本体に対し同心状に形成された工具本体側の支持部と、
前記ソケット本体及び支持部に同心状に配置されて前記ナット嵌合部内に臨み前記支持部に対し回転不能且つ前記ナット嵌合部内から退避移動するように軸方向可動支持され前記ボルトの係合部を嵌合支持させ前記工具本体に対して回り止め係止する係支部を先端側内周に備えたインナー・ソケットと、
該インナー・ソケットを前記支持部に対して付勢し前記ナット嵌合部側に臨ませる付勢部材と、
前記インナー・ソケットの軸心部に軸心方向に一定範囲で可動支持され前記係止部側で前記ボルトの先端に当接し出入力した超音波を前記ボルトの軸力検出に用いるための超音波センサと、
前記インナー・ソケットに径方向へ可動支持され該インナー・ソケットの外周に対し出没可能でインナー・ソケットの外周側への突出位置で前記支持部に軸方向に係合し前記ソケット本体に対する前記インナー・ソケットの軸方向移動を阻止するストッパ部材と、
前記超音波センサ側に設けられ該超音波センサが前記係止部側に臨んだ位置で前記ストッパ部材の内端に対向して該ストッパ部材の没移動を阻止し前記超音波センサが前記係止部から前記一定範囲で前記インナー・ソケットに対し軸方向へ退避移動すると前記ストッパ部材の没移動を許容するロック部材と、
を備えたことを特徴とする軸力検知締結工具。
【請求項2】
請求項1記載の軸力検知締結工具において、
前記ストッパ部材は、前記ソケット本体に軸方向に係合して該ソケット本体に対する前記インナー・ソケットのソケット本体外への軸方向移動を阻止する、
ことを特徴とする軸力検知締結工具。
【請求項3】
請求項1又は2記載の軸力検知締結工具において、
前記ストッパ部材は、前記インナー・ソケットの周方向へ所定間隔で複数備えられたストッパ・ピンである、
ことを特徴とする軸力検知締結工具。
【請求項4】
請求項2記載の軸力検知締結工具において、
前記ロック部材は、前記超音波センサに固定され外周面に大径部とテーパー部と小径部とを備えた、
ことを特徴とする軸力検知締結工具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−89176(P2010−89176A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−259073(P2008−259073)
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000144485)株式会社サンノハシ (9)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000144485)株式会社サンノハシ (9)
【Fターム(参考)】
[ Back to top ]