
軸受回転状態計測監視装置
【課題】小型軽量化が可能で、且つ、高速回転する軸受の回転状態を高精度に計測監視可能な軸受回転状態計測監視装置を提供する。
【解決手段】軸受の回転状態を計測し、計測結果を電気信号として出力するセンサ部2と、センサ部から出力された電気信号に基づいて発光素子6を発光させることで、電気信号を光信号に変換して出力する第1の信号変換部4と、発光素子によって発せられた光信号を受光素子8により受光し、その光信号を電気信号に変換して出力する第2の信号変換部10と、第2の信号変換部から出力された電気信号を受信して演算処理を行うと共に、回転状態を監視する制御監視部12とを備えており、発光素子は回転軸42の軸心Cに沿って回転しているのに対し、受光素子は静置され、発光素子によって発せられた光信号が発信時における回転方向への位相を移動させることなく、受光素子によって常に受光可能な位置関係を成してこれらを相対配置する。
【解決手段】軸受の回転状態を計測し、計測結果を電気信号として出力するセンサ部2と、センサ部から出力された電気信号に基づいて発光素子6を発光させることで、電気信号を光信号に変換して出力する第1の信号変換部4と、発光素子によって発せられた光信号を受光素子8により受光し、その光信号を電気信号に変換して出力する第2の信号変換部10と、第2の信号変換部から出力された電気信号を受信して演算処理を行うと共に、回転状態を監視する制御監視部12とを備えており、発光素子は回転軸42の軸心Cに沿って回転しているのに対し、受光素子は静置され、発光素子によって発せられた光信号が発信時における回転方向への位相を移動させることなく、受光素子によって常に受光可能な位置関係を成してこれらを相対配置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種の回転機械装置(例えば、航空機のジェットエンジンや産業用のガスタービンエンジンなど)の主軸を支持する軸受において、当該軸受の回転状態(例えば、軸受の温度、歪みや振動、あるいは転動体の回転数など)を計測監視するための軸受回転状態計測監視装置(以下、計測監視装置という)の改良に関する。
【背景技術】
【0002】
従来から、かかるジェットエンジンやガスタービンエンジンなどには、その主軸を支持する軸受(例えば、玉軸受、ころ軸受あるいはすべり軸受など)の回転状態を計測監視するための計測監視装置が設けられており、軸受の温度変化、歪みや振動有無、あるいは転動体の回転数変動などの計測が行われている。これにより、軸受の回転状態(回転異常の有無)を監視し、当該軸受に対する損傷(例えば、軌道面の微小剥離など)の発生を防止しているとともに、初期段階で確実に検知し、これらのジェットエンジンやガスタービンエンジンなどの安全性確保を図っている。
【0003】
このような計測監視装置においては、各種のセンサ(温度センサ、歪センサや振動センサ、あるいは磁気センサや光学センサなど)によって軸受の回転状態(軸受温度、歪みや振動、転動体位置や角度など)を計測し、その結果が電気信号(以下、計測信号という)として出力されている。そして、計測信号は所定の信号処理部に送信(伝達)され、当該信号処理部によって、単位時間当たりの軸受の温度、歪みや振動などの変化・変動量、あるいは転動体の位置や角度などの変動量を演算処理することで、かかる軸受の温度推移、歪み量や振動量、あるいは転動体の回転速度や回転角度など、すなわち軸受の回転状態が計測されている。
【0004】
ところで、例えば、ジェットエンジンやガスタービンエンジンなどの高速回転する主軸を支持する軸受は、内外輪が同時に回転する構成、すなわち内外輪がいずれも回転輪として構成される場合がある。この場合、かかる軸受の回転状態を計測監視する際、その計測精度の向上を図るべく、各種のセンサを回転体(内外輪や主軸など)に取り付け、当該回転するセンサから出力された計測信号を信号処理部に対して伝達することが必要とされる場合がある。
【0005】
その際、回転するセンサから出力された計測信号の信号処理部に対する伝達手段としては、従来から、ブラシと導電板とを接触させることで回転導通を図るスリップリングや、その接点として水銀などの導電性流体を用いたスリップリング、あるいは、電波を用いたテレメトリーシステムなどが実用されている。
例えば、特許文献1には、かかる伝達手段としてスリップリングを用いた計測監視装置の構成が一例として開示されている。
【0006】
このようなスリップリングやテレメトリーシステムを用いることで、回転体(主軸、回転輪、転動体及び保持器など)に取り付けられたセンサから出力された計測信号の伝達を確実に行うことが可能となる。さらに、テレメトリーシステムを用いた場合には、計測監視対象となる軸受が組み込まれた回転機械装置(ジェットエンジンやガスタービンエンジンなど)から離れた場所(遠隔地)に対し、計測信号を時間遅れが生じることなく(リアルタイムで)伝達することも可能となる。
【特許文献1】特開昭59−97316号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、高速回転する主軸を支持する軸受に対する計測信号の伝達手段として、スリップリングやテレメトリーシステムを適用した場合、計測監視装置の大型化を招きやすく、また、当該計測監視装置の発熱による誤動作を防止するための冷却装置などの附帯設備が必要となり、回転機械装置の小型軽量化を図る上でのボトルネックとなりやすい。また、スリップリングやテレメトリーシステムは、その許容回転速度が低いため、かかる制限によって計測監視対象可能な軸受の最大回転速度が限定されてしまい、これらの適用の自由度には限界がある。
【0008】
本発明は、このような課題を解決するためになされており、その目的は、小型軽量化を図ることが可能で、且つ、高速回転する軸受の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を高精度に計測監視することが可能な軸受回転状態計測監視装置を提供することにある。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明に係る軸受回転状態計測監視装置は、少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受の回転状態を計測監視している。かかる軸受回転状態計測監視装置は、転がり軸受の回転状態を計測し、その計測結果を電気信号として出力するセンサ部と、当該センサ部から出力された電気信号に基づいて発光素子を発光させることで、当該電気信号を光信号に変換して出力する第1の信号変換部と、前記発光素子によって発せられた光信号を受光素子により受光し、当該受光素子によって受光された光信号を電気信号に変換して出力する第2の信号変換部と、当該第2の信号変換部から出力された電気信号を受信し、前記軸受の回転状態を把握するために当該電気信号に基づいて演算処理を行うとともに、当該回転状態を監視する制御監視部とを備えている。この際、前記第1の信号変換部の発光素子は、前記回転軸の軸心に沿って回転しているのに対し、前記第2の信号変換部の受光素子は静置され、前記発光素子と受光素子とは、当該回転する発光素子によって発せられた光信号が、その発信時における前記回転方向への位相を移動させることなく、静置された受光素子によって常に受光可能となるような位置関係を成して相対配置されている。
【0010】
この場合、前記センサ部を前記相対回転する一方の軌道輪に設け、前記第1の信号変換部は、前記発光素子の発光方向が前記回転軸の軸心と重なるように、当該軸心近傍に設けるのに対し、前記第2の信号変換部及び制御監視部を装置外部の常に静止状態に保たれた部位に設け、前記受光素子は、その受光方向が前記発光素子の発光方向と同一方向となるように位置付ければよい。
【0011】
あるいは、前記センサ部及び第1の信号変換部を前記相対回転する一方の軌道輪に設け、前記発光素子は、環状構造を成し、その発光方向が放射方向へ沿うように位置付けるのに対し、前記第2の信号変換部を前記他方の軌道輪に設け、前記受光素子は、その受光方向が前記発光素子の発光方向の少なくとも一方向と同一方向となるように位置付けるとともに、前記制御監視部を装置外部の常に静止状態に保たれた部位に設けてもよい。
【0012】
いずれの構成であっても、与えられたアナログの電気信号をデジタル電気信号に変換して出力する第3の信号変換部を軸受回転状態計測監視装置に設けてもよい。この場合、前記センサ部は、転がり軸受の回転状態の計測結果をアナログの電気信号として出力して前記第3の信号変換部へ与え、前記第3の信号変換部は、前記センサ部から与えられたアナログ電気信号をデジタル電気信号に変換して前記第1の信号変換部へ出力する。そして、当該第1の信号変換部は、前記第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力している。
【発明の効果】
【0013】
本発明の軸受回転状態計測監視装置によれば、その小型軽量化を図ることができ、且つ、高速回転する軸受の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を高精度に計測監視することができる。
【発明を実施するための最良の形態】
【0014】
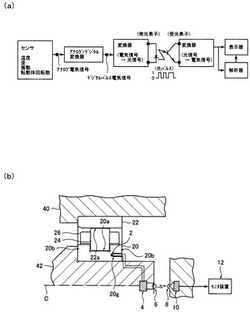
以下、本発明に係る軸受回転状態計測監視装置(以下、計測監視装置という)について、添付図面を参照して説明する。本発明において、計測監視装置は、少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受(以下、単に軸受という)の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を計測監視しており、図1(a)には、その装置構成が処理の流れとともに模式的に示されている。
【0015】
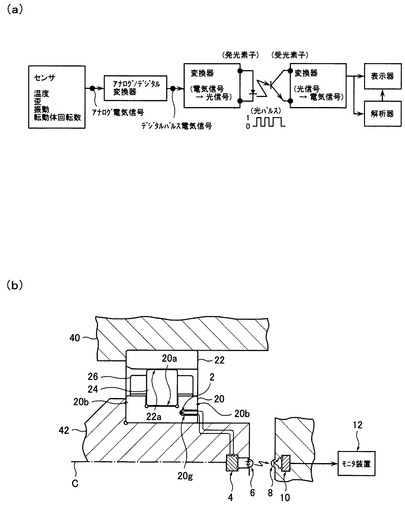
図1(b)には、本発明の第1実施形態に係る計測監視装置の構成が示されており、当該計測監視装置には、センサ部2、第1の信号変換部4、第2の信号変換部10、並びに制御監視部12が備えられ、これらにより軸受の回転状態の計測監視が行われている。
センサ部2は、軸受に取り付けられ、当該軸受の回転状態を計測し、その計測結果を電気信号として出力可能なセンサ(以下、センサ2という)として構成されている。なお、センサ2は、軸受の回転状態を計測可能なものであれば、その種類は特に限定されず、計測監視装置の使用目的や使用条件、あるいは軸受構成などに応じて各種のタイプを任意に選択して使用すればよい。
【0016】
例えば、軸受の回転時における温度を検知し、軸受温度の変化を計測するための温度センサや、当該回転時における歪みや振動を検知し、軸受歪みや軸受振動の変動を計測するための歪センサや振動センサなどを適用することができる。なお、軸受温度、軸受歪みや軸受振動は、軸受の回転速度(回転数)と密接に関連しており(例えば、回転速度が高速になるにしたがって高温となる、あるいは歪みや振動が激しくなる等)、これらの温度変化、歪変動や振動変動を計測することで、軸受の回転速度(回転数)の変動状態を把握することが可能となる。
【0017】
また、センサ2として、軸受の回転に伴って生じる磁気状態の変化(磁界の変化など)を検知する磁気センサや、当該軸受の回転に伴って生じる光の変化を検知する光学センサなどを適用してもよい。これにより、単位時間当たりの被検出体である回転体(例えば、回転輪、転動体や保持器など)の位置や角度などの変動量を演算処理することで、当該回転体、すなわち軸受の回転速度を計測することができる。
【0018】
第1の信号変換部4は、発光素子6が接続され、センサ2から出力された電気信号に基づいて当該発光素子6を発光させることで、当該電気信号を光信号に変換して出力する信号変換器(以下、第1信号変換器4という)として構成されている。これに対し、第2の信号変換部10は、受光素子8が接続され、発光素子6によって発せられた光信号を当該受光素子8により受光し、受光素子8によって受光された光信号を電気信号に変換して出力する信号変換器(以下、第2信号変換器10という)として構成されている。
【0019】
そして、制御監視部12は、第2信号変換器10から出力された電気信号を受信して軸受の回転状態を把握するために、当該電気信号に基づいて演算処理(上述したような軸受温度の変化量、歪みや振動の変動量、あるいは位置や角度の変動量などの演算処理)を行い、その演算結果(すなわち、軸受の回転状態)を記録する解析器として構成されているとともに、当該軸受の回転状態を表示し、その監視を行う表示器として構成されている。
【0020】
なお、本実施形態において、計測監視装置には第3の信号変換部が備えられており、当該第3の信号変換部は、与えられたアナログの電気信号をデジタル電気信号に変換して出力している。この場合、かかる電気信号のアナログからデジタルへの変換を行うための信号変換器を別途設けた構成としてもよいし、当該信号変換をセンサ2、あるいは第1信号変換器4によって行う構成としてもよい。いずれの場合も、センサ2は、軸受の回転状態の計測結果をアナログの電気信号として出力して第3の信号変換部へ与えており、当該第3の信号変換部は、センサ2から与えられたアナログ電気信号をデジタル電気信号に変換して第1信号変換器4へ出力している。
そして、第1信号変換器4は、第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子6を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力している。
【0021】
また、制御監視部12としては、第2信号変換器10から出力された電気信号に基づいて演算処理を行う演算回路、当該演算結果(軸受の回転状態)を記録する記録部(メモリや磁気ディスク装置など)、及び当該軸受の回転状態を示すメッセージなどを表示し、その監視を可能とする監視部(モニタ装置など)を一例として想定している。これらは、一体的に構成されていてもよいし、個別の装置(例えば、演算記録装置と監視装置)として設けられていてもよく、その構成は限定されない。一例として、図1(b)には、これらが一体化されたモニタ装置を制御監視部12とした構成が示されている。
【0022】
なお、かかるモニタ装置に代えて、あるいはこれに加えて、軸受の回転状態に異常が発生した場合、例えば、軸受の温度が過度に上昇した場合、軸受の歪みや振動が過度に増大した場合などに、警告音を鳴動させるアラーム鳴動装置やランプを点滅させるランプ点滅装置などを制御監視部12とした構成であってもよい。これにより、確実に、且つリアルタイムに軸受の回転状態、特に軸受に対する異常の発生を把握することができる。
【0023】
このような構成を成す計測監視装置において、第1信号変換器4の発光素子6は、回転軸42の軸心Cに沿って回転しているのに対し、第2信号変換器10の受光素子8は、回転することなく静置されている。一例として、図1(b)に示す構成においては、センサ2が相対回転する一方の軌道輪(内輪)20に設けられ、第1信号変換器4は、発光素子6の発光方向(同図の左から右へ向かう方向)が回転軸42の軸心Cと重なるように(すなわち、軸心Cの延出方向となるように)、当該軸心C近傍に設けられている。これに対し、第2信号変換器10及び制御監視部12は、装置外部の常に静止状態に保たれた部位に設けられ、受光素子8は、その受光方向(図1(b)の左から右へ向かう方向)が発光素子6の発光方向と同一方向となるように位置付けられている。
【0024】
すなわち、発光素子6と受光素子8とは、当該回転する発光素子6によって発せられた光信号がその発信時における前記回転方向への位相を移動させることなく(つまり、光信号が常に定位置から発信され)、静置された受光素子8によって常時確実に受光可能となるような位置関係を成して相対配置されている。なお、この場合、第1信号変換器4(発光素子6)、及び第2信号変換器10(受光素子8)は、いずれも1つだけ計測監視装置に設ければよい。
【0025】
これにより、発光素子6は、それ自体を回転軸42とともに回転させる一方で、光信号が発信される際の当該回転方向への位相は軸心Cと重なり、発せられた光信号は当該軸心Cの延長方向へ向かって直進するため、その位相が発光素子6の回転方向へ移動することがない。したがって、その受光方向を発光素子6の発光方向と同一方向となるように受光素子8を位置付け、計測監視装置の外部に静置することで、受光素子8が1つのみであっても、当該受光素子8によって発光素子6から発せられた光信号を常に受光することができる。
【0026】
すなわち、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測信号(電気信号)を、第1信号変換器4及び第2信号変換器10を介して制御監視部12へ確実に伝達することができる。この結果、計測信号の伝達手段としてスリップリングやテレメトリーシステムなどを設ける必要はなく、計測監視装置の小型軽量化を図ることが容易となる。また、本実施形態に係る計測監視装置によれば、軸受が支持する回転軸の回転速度(回転数)による制約を受けることがなく、回転軸が高速回転し、かかる軸受が当該高速回転軸を支持する場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0027】
さらに、かかる計測監視装置によれば、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測結果(電気信号)が、発光素子6から受光素子8へ光パルス信号として受信されているため、例えば、ジェットエンジン内部などのように、油ミストなどが飛散されている過酷な環境下に軸受が配設されるような場合であっても、光パルス信号の優れた直進性により、計測結果を制御監視部12へ確実に伝達させることができる。これにより、かかる過酷な環境下に配設された軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0028】
ここで、このような計測監視装置においては、当該計測監視装置が搭載される回転機械装置の使用目的や使用条件などに基づく装置構成に応じて、任意の構造を成す軸受を計測監視対象とすることができる。図1(b)には、その軸受構造の一例が本発明の第1実施形態として示されている。
【0029】
図1(b)に示す構成において、計測監視対象となる軸受は、相対回転可能に対向して配置された一対の軌道輪20,22のうち、外輪22がハウジング40に固定されて常時静止する静止輪として構成されているとともに、内輪20が回転軸42に固定されて当該回転軸42とともに、外輪22に対して回転する回転輪として構成されている。内輪20には、その外周部に軌道面(内輪軌道面)20aが形成されているとともに、外輪22には、その内周部に内輪軌道面20aと対向して軌道面(外輪軌道面)22aが形成されており、これらの軌道面20a,22a間に複数の転動体(一例として、円筒ころ)24が転動可能に組み込まれている。
【0030】
この場合、転動体(円筒ころ)24は、環状を成す保持器26に形成されたポケットに1つずつ回転自在に保持された状態で内外輪20,22間に組み込まれ、内外輪軌道面20a,22a間を転動している。これにより、各転動体24は、その転動面が相互に接触することなく内外輪軌道面20a,22a間を転動することができ、結果として、当該各転動体24が相互に接触して摩擦が生じることによる回転抵抗の増大や、焼付きなどを防止することができる。
【0031】
なお、内輪20には、内輪軌道面20aの両側に、その全周に亘って鍔部20bが設けられており、当該鍔部20bによって、各転動体(円筒ころ)24が軸方向に対して位置決めされている。ここで、図1(b)には、内輪20に鍔部20bを設けた構成を例示しているが、同様の鍔部を内輪に代えて、あるいはこれに加えて外輪に対して設けた構成としてもよい。
【0032】
また、図1(b)に示す構成においては、転動体24として円筒ころが内外輪20,22間に組み込まれているが、かかる円筒ころに代えて、円錐ころや球面ころなどを転動体として内外輪20,22間に組み込んでもよいし、あるいは、転動体として玉を内外輪20,22間に組み込んだ構成としてもよい。その際、転動体列は、図1(b)に示すような単列構成であってもよいし、2列以上の複列構成であってもよい。
【0033】
さらに、転動体24を回転自在に保持する保持器26は、当該転動体24の種類に応じて各種のタイプを任意に選択して適用すればよい。例えば、転動体が各種のころ(円筒ころ(図1(b))、円錐ころ及び球面ころなど)である場合、もみ抜き型、くし型及びかご型などのタイプを適用することができ、転動体が玉である場合、波型や冠型などのタイプを適用することができる。
【0034】
本実施形態において、かかる軸受には、回転輪である内輪20に対し、当該内輪20とともに回転するセンサ2が設けられている。この場合、内輪20には、センサ2を取り付けるために軸方向の一端側(図1(b)の右端側)を凹状に窪ませて成る取付部20gが形成されており、当該取付部20gに収容されることで、センサ2が内輪20に対して取り付けられている。
【0035】
なお、センサ2としては、軸受(具体的には、内輪20)の回転時における温度を検知し、軸受温度の変化を計測する温度センサや、当該回転時における歪みや振動を検知し、軸受歪みや軸受振動の変動を計測するための歪センサや振動センサなどを想定している。その際、センサ2の数は特に限定されず、計測監視装置の使用目的や使用条件などに基づいて設定される軸受に対する回転状態の計測精度に応じて、1つのみ、あるいは複数設ければよい。なお、センサ2を複数設ける場合、すべてを同種のセンサ(例えば、温度センサ、歪センサや振動センサなど)としてもよいし、各種のセンサを混在させてもよい。
【0036】
さらに、取付部20gの大きさや形状は、センサ2の大きさや形状に応じて当該センサ2を取り付け可能となるように任意に設定すればよい。例えば、内輪20の一端側(図1(b)の右端側)の所定位置を円形や矩形の穴状に窪ませた構成であってもよいし、当該一端側の全周に亘って連続して溝状に窪ませた構成であってもよい。あるいは、取付部20gを形成することなく、センサ2を内輪20の一端面(図1(b)の右端面)に直接取り付けた構成としてもよい。いずれの場合であっても、センサ2は、内輪20(取付部20g)の大きさや形状などに応じ、当該内輪20(取付部20g)に対して嵌合、接着、溶接、あるいは締結など任意の手段によって取り付ければよい。
【0037】
また、回転軸42には、その軸端側(図1(b)の右端側)へ、第1信号変換器4が当該回転軸42の軸心C上に設けられており、当該第1信号変換器4の発光素子6が前記回転軸42の軸端から露出され、その発光方向(同図の左から右へ向かう方向)が前記軸心Cの延長線と重なるように位置付けられている。これに対し、第2信号変換器10は、その受光方向(図1(b)の左から右へ向かう方向)が発光素子6の発光方向と同一となるように受光素子8を位置付けた状態で、装置外部の常に静止状態に保たれた部位に設ければよい。また、制御監視部12は、第2信号変換器10から出力された電気信号を受信することが可能であれば、その配設箇所は特に限定されず、装置外部の常に静止状態に保たれた任意の部位に設ければよい。
【0038】
その際、センサ2と第1信号変換器、第1信号変換器4と発光素子6、及び第2信号変換器10と受光素子8のそれぞれの接続手段は特に限定されず、軸受及び回転軸の大きさや形状などに応じて任意の手段で接続させればよい。一例として、図1(b)に示す構成においては、センサ2と第1信号変換器とを信号ケーブルによって接続させているのに対し、発光素子6を第1信号変換器4の制御基板上に直接接続させているとともに、受光素子8を第2信号変換器10の制御基板上に直接接続させている。
なお、かかる構成に代えて、例えば、第1信号変換器4と発光素子6とを信号ケーブルによって接続させ、当該第1信号変換器4のみを回転軸42の軸心C上からずらした部位(一例として、回転軸42の外周部など)に配設させた構成としてもよい。
【0039】
ここで、軸受構造は、図1(b)に示す構成には限定されず、例えば、図2に示すような本発明の第2実施形態に係る構成であってもよい。この場合、基本的な軸受構造は、上述した第1実施形態に係る軸受(図1(b))と同様であるため、図面上では、これと同一若しくは類似の構成部材に同一符号を付しており、以下の説明では、これらの説明は省略若しくは簡略化する。
【0040】
図2に示す構成において、計測監視対象となる軸受は、内輪20が回転軸(以下、内輪軸という)42に固定されて当該内輪軸42とともに、外輪22に対して回転する回転輪として構成されているのに対し、外輪22が回転軸(以下、外輪軸という)44に固定されて当該外輪軸44とともに、内輪20に対して回転する回転輪として構成されている。
【0041】
かかる軸受には、回転輪である内輪20に対し、当該内輪20とともに回転するセンサ14が設けられている。センサ14としては、軸受(具体的には、内輪20)の回転速度を計測するための速度センサなどを想定している。例えば、図2に示す構成においては、絶縁材を円環状に形成し、当該円環状体に周方向へ沿って複数の貫通孔を所定間隔(例えば、等間隔)で穿孔した後、隣り合う貫通孔間の柱部に対して導線を巻回させて複数のコイル14cが形成されており、一種の磁気センサが構成されている。この場合、センサ14は、その内周部を内輪軸42の外周面に当接させて当該回転軸42に固定されるとともに、環状の取付部材46を介して内輪20の軸方向の一側面(図2の右側面)に固定されることで、コイル14cが転動体24及び保持器26といずれも接触することなく、内輪軸42及び内輪20とともに回転する構造となっている。
【0042】
センサ14をこのような構成とすることで、例えば、転動体24や保持器26などを各種の磁性材で構成した場合、当該センサ14の回転中、コイル14cにはかかる転動体24や保持器26によって発生された磁力が作用し、当該コイル14cに対して所定の誘導電圧(誘導電流)を生じさせることができる。その際、かかる転動体24や保持器26によって発生する磁力の強さは、センサ14、並びにこれらの転動体24及び保持器26の回転に伴って連続的に変化することとなる。したがって、センサ14によって回転時における誘導電圧(誘導電流)の強さを検知し、制御監視部12において単位時間当たりの内輪20の位置や角度などの変動量を演算処理することで、当該内輪20、すなわち軸受の回転速度を計測することができる。
【0043】
なお、センサ2の内輪軸42、あるいは内輪2に対する取付手段(固定手段)は特に限定されず、当該内輪軸42及び内輪2の大きさや形状などに応じて、例えば嵌合、接着、溶接あるいは締結など任意の手段で取り付ければよい。
【0044】
上述した本発明の第1実施形態(図1(b))、並びに第2実施形態に係る計測診断装置(図2)においては、第1信号変換器4(発光素子6)、及び第2信号変換器10(受光素子8)をいずれも回転軸(内輪軸)42の軸心C近傍(すなわち、アキシアル方向)に設けた構成としているが、これらの相対的な位置関係は、発光素子6と受光素子8とが、回転する発光素子6によって発せられた光信号がその発信時における当該回転方向への位相を移動させることなく(すなわち、光信号が常に定位置から発信され)、静置された受光素子によって常に受光可能となるように相対配置されている限り、任意に設定することができる。
【0045】
図3(a),(b)には、発光素子16と受光素子8とを軸心C方向(アキシアル方向)ではなく、径方向(ラジアル方向)に相対配置した本発明の第3実施形態に係る計測監視装置が示されており、以下、その構成について説明する。なお、この場合、計測監視対象となる軸受の構造は、上述した第1実施形態に係る軸受(図1(b))と同様であるため、これについては特に説明しない。また、軸受の設計変更も第1実施形態と同様に適宜可能である。加えて、計測監視装置の基本的な構成も第1実施形態と同様であるため、同一若しくは類似の構成部材には同一符号を付し、以下ではこれらの説明を省略若しくは簡略化する。
【0046】
本実施形態に係る計測監視装置には、センサ2、第1信号変換器4、第2信号変換器10、並びに制御監視部12が備えられ、これらにより軸受の回転状態の計測監視が行われていることは、上述した第1実施形態に係る計測監視装置(図1(b))と同様である。
【0047】
図3(a),(b)に示す構成において、センサ2及び第1信号変換器4は、相対回転する一方の軌道輪(内輪)20に設けられ、発光素子16は、環状構造を成し、その発光方向(同図(a)の下から上へ向かう方向)が放射方向へ沿うように位置付けられている。これに対し、第2信号変換器10は、他方の軌道輪(外輪)22に設けられ、受光素子8は、その受光方向(図3(a)の下から上へ向かう方向)が発光素子16の発光方向の少なくとも一方向と同一方向となるように位置付けられているとともに、制御監視部12は、装置外部の常に静止状態に保たれた部位に設けられている。なお、本実施形態においても、第2信号変換器10(受光素子8)は、1つだけ計測監視装置に設ければよい。
【0048】
この場合、発光素子16は、その内径寸法が内輪20の外径寸法と略同一寸法を成すとともに、その外径寸法が外輪22の内径寸法よりも小さな寸法を成す環状に構成されており、光信号をその全周に亘って放射方向(全放射線の延出方向(以下、全放射線方向という))へ同時に発信することができる構造となっている。なお、発光素子16は、その全体が光信号を全放射線方向へ同時に発信可能な構成とすればよいが、複数の発光素子(例えば、上述した第1実施形態に係る発光素子6)を連続して並べて環状に配設し、各発光素子からそれぞれの放射線方向へ同時に光信号を発信させることで、全周に亘って光信号が発信される構成としてもよい。
【0049】
そして、第1信号変換器4を内輪20の軸方向の一側面(図3(a)の右側面)に設けるとともに、発光素子16を当該一側面に取り付けることで、当該発光素子16を当該内輪20とともに回転させることができ、当該内輪20の外周部よりも拡径方向へ突出させることで、その発光方向(同図の下から上へ向かう方向)が内輪20から外輪22へ向かう方向(すなわち、ラジアル方向)へ沿うように位置付けることができる。
【0050】
これに対し、第2信号変換器10は、その受光方向(図3(a)の下から上へ向かう方向)が発光素子16の発光方向と同一となるように受光素子8を位置付けた状態で、常に静止状態に保たれた外輪22の軸方向の一側面(同図の右側面)に設ければよい。また、制御監視部12は、装置外部の常に静止状態に保たれた任意の部位、例えば、外輪22が固定されるハウジング40などに設ければよい。
【0051】
これにより、発光素子16は、回転軸42とともに回転されるが、環状構造を成しているため、当該発光素子16から発せられた光信号は、全放射線方向へ同時に発信され、その位相が当該発光素子16の回転方向へ移動することがない。すなわち、発光素子16から発せられた光信号は、常に当該発光素子16の全放射線方向へ向かって同時に直進することとなる。したがって、その受光方向を発光素子16の発光方向の少なくとも一方向と同一方向となるように受光素子8を位置付け、計測監視装置の外部に静置することで、受光素子8が1つのみであっても、当該受光素子8によって発光素子16から発せられた光信号を常に受光することができる。
【0052】
これにより、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測信号(電気信号)を、第1信号変換器4及び第2信号変換器10を介して制御監視部12へ確実に伝達することができる。この結果、計測監視装置の小型軽量化を図ることが容易となるだけでなく、回転軸が高速回転し、かかる軸受が当該高速回転軸を支持する場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0053】
また、センサ2によって計測された軸受の回転状態を示す計測結果(電気信号)が、発光素子16から受光素子8へ光パルス信号として受信されているため、油ミストなどが飛散されている過酷な環境下(ジェットエンジンなど)に軸受が配設されるような場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【図面の簡単な説明】
【0054】
【図1】本発明の第1実施形態に係る軸受回転状態計測監視装置を説明するための図であって、(a)は、装置構成を処理の流れとともに模式的に示した図、(b)は、装置構成を模式的に示した断面図。
【図2】本発明の第2実施形態に係る軸受回転状態計測監視装置の構成を模式的に示した断面図。
【図3】本発明の第3実施形態に係る軸受回転状態計測監視装置を説明するための図であって、(a)は、装置構成を模式的に示した断面図、(b)は、同図(a)の矢印A方向から見た平面図。
【符号の説明】
【0055】
2 センサ
4 第1信号変換器
6 発光素子
8 受光素子
10 第2信号変換器
12 制御監視部
20 内輪
22 外輪
24 転動体
26 保持器
40 ハウジング
42 回転軸
C 軸心
【技術分野】
【0001】
本発明は、各種の回転機械装置(例えば、航空機のジェットエンジンや産業用のガスタービンエンジンなど)の主軸を支持する軸受において、当該軸受の回転状態(例えば、軸受の温度、歪みや振動、あるいは転動体の回転数など)を計測監視するための軸受回転状態計測監視装置(以下、計測監視装置という)の改良に関する。
【背景技術】
【0002】
従来から、かかるジェットエンジンやガスタービンエンジンなどには、その主軸を支持する軸受(例えば、玉軸受、ころ軸受あるいはすべり軸受など)の回転状態を計測監視するための計測監視装置が設けられており、軸受の温度変化、歪みや振動有無、あるいは転動体の回転数変動などの計測が行われている。これにより、軸受の回転状態(回転異常の有無)を監視し、当該軸受に対する損傷(例えば、軌道面の微小剥離など)の発生を防止しているとともに、初期段階で確実に検知し、これらのジェットエンジンやガスタービンエンジンなどの安全性確保を図っている。
【0003】
このような計測監視装置においては、各種のセンサ(温度センサ、歪センサや振動センサ、あるいは磁気センサや光学センサなど)によって軸受の回転状態(軸受温度、歪みや振動、転動体位置や角度など)を計測し、その結果が電気信号(以下、計測信号という)として出力されている。そして、計測信号は所定の信号処理部に送信(伝達)され、当該信号処理部によって、単位時間当たりの軸受の温度、歪みや振動などの変化・変動量、あるいは転動体の位置や角度などの変動量を演算処理することで、かかる軸受の温度推移、歪み量や振動量、あるいは転動体の回転速度や回転角度など、すなわち軸受の回転状態が計測されている。
【0004】
ところで、例えば、ジェットエンジンやガスタービンエンジンなどの高速回転する主軸を支持する軸受は、内外輪が同時に回転する構成、すなわち内外輪がいずれも回転輪として構成される場合がある。この場合、かかる軸受の回転状態を計測監視する際、その計測精度の向上を図るべく、各種のセンサを回転体(内外輪や主軸など)に取り付け、当該回転するセンサから出力された計測信号を信号処理部に対して伝達することが必要とされる場合がある。
【0005】
その際、回転するセンサから出力された計測信号の信号処理部に対する伝達手段としては、従来から、ブラシと導電板とを接触させることで回転導通を図るスリップリングや、その接点として水銀などの導電性流体を用いたスリップリング、あるいは、電波を用いたテレメトリーシステムなどが実用されている。
例えば、特許文献1には、かかる伝達手段としてスリップリングを用いた計測監視装置の構成が一例として開示されている。
【0006】
このようなスリップリングやテレメトリーシステムを用いることで、回転体(主軸、回転輪、転動体及び保持器など)に取り付けられたセンサから出力された計測信号の伝達を確実に行うことが可能となる。さらに、テレメトリーシステムを用いた場合には、計測監視対象となる軸受が組み込まれた回転機械装置(ジェットエンジンやガスタービンエンジンなど)から離れた場所(遠隔地)に対し、計測信号を時間遅れが生じることなく(リアルタイムで)伝達することも可能となる。
【特許文献1】特開昭59−97316号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、高速回転する主軸を支持する軸受に対する計測信号の伝達手段として、スリップリングやテレメトリーシステムを適用した場合、計測監視装置の大型化を招きやすく、また、当該計測監視装置の発熱による誤動作を防止するための冷却装置などの附帯設備が必要となり、回転機械装置の小型軽量化を図る上でのボトルネックとなりやすい。また、スリップリングやテレメトリーシステムは、その許容回転速度が低いため、かかる制限によって計測監視対象可能な軸受の最大回転速度が限定されてしまい、これらの適用の自由度には限界がある。
【0008】
本発明は、このような課題を解決するためになされており、その目的は、小型軽量化を図ることが可能で、且つ、高速回転する軸受の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を高精度に計測監視することが可能な軸受回転状態計測監視装置を提供することにある。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明に係る軸受回転状態計測監視装置は、少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受の回転状態を計測監視している。かかる軸受回転状態計測監視装置は、転がり軸受の回転状態を計測し、その計測結果を電気信号として出力するセンサ部と、当該センサ部から出力された電気信号に基づいて発光素子を発光させることで、当該電気信号を光信号に変換して出力する第1の信号変換部と、前記発光素子によって発せられた光信号を受光素子により受光し、当該受光素子によって受光された光信号を電気信号に変換して出力する第2の信号変換部と、当該第2の信号変換部から出力された電気信号を受信し、前記軸受の回転状態を把握するために当該電気信号に基づいて演算処理を行うとともに、当該回転状態を監視する制御監視部とを備えている。この際、前記第1の信号変換部の発光素子は、前記回転軸の軸心に沿って回転しているのに対し、前記第2の信号変換部の受光素子は静置され、前記発光素子と受光素子とは、当該回転する発光素子によって発せられた光信号が、その発信時における前記回転方向への位相を移動させることなく、静置された受光素子によって常に受光可能となるような位置関係を成して相対配置されている。
【0010】
この場合、前記センサ部を前記相対回転する一方の軌道輪に設け、前記第1の信号変換部は、前記発光素子の発光方向が前記回転軸の軸心と重なるように、当該軸心近傍に設けるのに対し、前記第2の信号変換部及び制御監視部を装置外部の常に静止状態に保たれた部位に設け、前記受光素子は、その受光方向が前記発光素子の発光方向と同一方向となるように位置付ければよい。
【0011】
あるいは、前記センサ部及び第1の信号変換部を前記相対回転する一方の軌道輪に設け、前記発光素子は、環状構造を成し、その発光方向が放射方向へ沿うように位置付けるのに対し、前記第2の信号変換部を前記他方の軌道輪に設け、前記受光素子は、その受光方向が前記発光素子の発光方向の少なくとも一方向と同一方向となるように位置付けるとともに、前記制御監視部を装置外部の常に静止状態に保たれた部位に設けてもよい。
【0012】
いずれの構成であっても、与えられたアナログの電気信号をデジタル電気信号に変換して出力する第3の信号変換部を軸受回転状態計測監視装置に設けてもよい。この場合、前記センサ部は、転がり軸受の回転状態の計測結果をアナログの電気信号として出力して前記第3の信号変換部へ与え、前記第3の信号変換部は、前記センサ部から与えられたアナログ電気信号をデジタル電気信号に変換して前記第1の信号変換部へ出力する。そして、当該第1の信号変換部は、前記第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力している。
【発明の効果】
【0013】
本発明の軸受回転状態計測監視装置によれば、その小型軽量化を図ることができ、且つ、高速回転する軸受の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を高精度に計測監視することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明に係る軸受回転状態計測監視装置(以下、計測監視装置という)について、添付図面を参照して説明する。本発明において、計測監視装置は、少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受(以下、単に軸受という)の回転状態(例えば、軸受の温度、歪みや振動、転動体の回転数など)を計測監視しており、図1(a)には、その装置構成が処理の流れとともに模式的に示されている。
【0015】
図1(b)には、本発明の第1実施形態に係る計測監視装置の構成が示されており、当該計測監視装置には、センサ部2、第1の信号変換部4、第2の信号変換部10、並びに制御監視部12が備えられ、これらにより軸受の回転状態の計測監視が行われている。
センサ部2は、軸受に取り付けられ、当該軸受の回転状態を計測し、その計測結果を電気信号として出力可能なセンサ(以下、センサ2という)として構成されている。なお、センサ2は、軸受の回転状態を計測可能なものであれば、その種類は特に限定されず、計測監視装置の使用目的や使用条件、あるいは軸受構成などに応じて各種のタイプを任意に選択して使用すればよい。
【0016】
例えば、軸受の回転時における温度を検知し、軸受温度の変化を計測するための温度センサや、当該回転時における歪みや振動を検知し、軸受歪みや軸受振動の変動を計測するための歪センサや振動センサなどを適用することができる。なお、軸受温度、軸受歪みや軸受振動は、軸受の回転速度(回転数)と密接に関連しており(例えば、回転速度が高速になるにしたがって高温となる、あるいは歪みや振動が激しくなる等)、これらの温度変化、歪変動や振動変動を計測することで、軸受の回転速度(回転数)の変動状態を把握することが可能となる。
【0017】
また、センサ2として、軸受の回転に伴って生じる磁気状態の変化(磁界の変化など)を検知する磁気センサや、当該軸受の回転に伴って生じる光の変化を検知する光学センサなどを適用してもよい。これにより、単位時間当たりの被検出体である回転体(例えば、回転輪、転動体や保持器など)の位置や角度などの変動量を演算処理することで、当該回転体、すなわち軸受の回転速度を計測することができる。
【0018】
第1の信号変換部4は、発光素子6が接続され、センサ2から出力された電気信号に基づいて当該発光素子6を発光させることで、当該電気信号を光信号に変換して出力する信号変換器(以下、第1信号変換器4という)として構成されている。これに対し、第2の信号変換部10は、受光素子8が接続され、発光素子6によって発せられた光信号を当該受光素子8により受光し、受光素子8によって受光された光信号を電気信号に変換して出力する信号変換器(以下、第2信号変換器10という)として構成されている。
【0019】
そして、制御監視部12は、第2信号変換器10から出力された電気信号を受信して軸受の回転状態を把握するために、当該電気信号に基づいて演算処理(上述したような軸受温度の変化量、歪みや振動の変動量、あるいは位置や角度の変動量などの演算処理)を行い、その演算結果(すなわち、軸受の回転状態)を記録する解析器として構成されているとともに、当該軸受の回転状態を表示し、その監視を行う表示器として構成されている。
【0020】
なお、本実施形態において、計測監視装置には第3の信号変換部が備えられており、当該第3の信号変換部は、与えられたアナログの電気信号をデジタル電気信号に変換して出力している。この場合、かかる電気信号のアナログからデジタルへの変換を行うための信号変換器を別途設けた構成としてもよいし、当該信号変換をセンサ2、あるいは第1信号変換器4によって行う構成としてもよい。いずれの場合も、センサ2は、軸受の回転状態の計測結果をアナログの電気信号として出力して第3の信号変換部へ与えており、当該第3の信号変換部は、センサ2から与えられたアナログ電気信号をデジタル電気信号に変換して第1信号変換器4へ出力している。
そして、第1信号変換器4は、第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子6を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力している。
【0021】
また、制御監視部12としては、第2信号変換器10から出力された電気信号に基づいて演算処理を行う演算回路、当該演算結果(軸受の回転状態)を記録する記録部(メモリや磁気ディスク装置など)、及び当該軸受の回転状態を示すメッセージなどを表示し、その監視を可能とする監視部(モニタ装置など)を一例として想定している。これらは、一体的に構成されていてもよいし、個別の装置(例えば、演算記録装置と監視装置)として設けられていてもよく、その構成は限定されない。一例として、図1(b)には、これらが一体化されたモニタ装置を制御監視部12とした構成が示されている。
【0022】
なお、かかるモニタ装置に代えて、あるいはこれに加えて、軸受の回転状態に異常が発生した場合、例えば、軸受の温度が過度に上昇した場合、軸受の歪みや振動が過度に増大した場合などに、警告音を鳴動させるアラーム鳴動装置やランプを点滅させるランプ点滅装置などを制御監視部12とした構成であってもよい。これにより、確実に、且つリアルタイムに軸受の回転状態、特に軸受に対する異常の発生を把握することができる。
【0023】
このような構成を成す計測監視装置において、第1信号変換器4の発光素子6は、回転軸42の軸心Cに沿って回転しているのに対し、第2信号変換器10の受光素子8は、回転することなく静置されている。一例として、図1(b)に示す構成においては、センサ2が相対回転する一方の軌道輪(内輪)20に設けられ、第1信号変換器4は、発光素子6の発光方向(同図の左から右へ向かう方向)が回転軸42の軸心Cと重なるように(すなわち、軸心Cの延出方向となるように)、当該軸心C近傍に設けられている。これに対し、第2信号変換器10及び制御監視部12は、装置外部の常に静止状態に保たれた部位に設けられ、受光素子8は、その受光方向(図1(b)の左から右へ向かう方向)が発光素子6の発光方向と同一方向となるように位置付けられている。
【0024】
すなわち、発光素子6と受光素子8とは、当該回転する発光素子6によって発せられた光信号がその発信時における前記回転方向への位相を移動させることなく(つまり、光信号が常に定位置から発信され)、静置された受光素子8によって常時確実に受光可能となるような位置関係を成して相対配置されている。なお、この場合、第1信号変換器4(発光素子6)、及び第2信号変換器10(受光素子8)は、いずれも1つだけ計測監視装置に設ければよい。
【0025】
これにより、発光素子6は、それ自体を回転軸42とともに回転させる一方で、光信号が発信される際の当該回転方向への位相は軸心Cと重なり、発せられた光信号は当該軸心Cの延長方向へ向かって直進するため、その位相が発光素子6の回転方向へ移動することがない。したがって、その受光方向を発光素子6の発光方向と同一方向となるように受光素子8を位置付け、計測監視装置の外部に静置することで、受光素子8が1つのみであっても、当該受光素子8によって発光素子6から発せられた光信号を常に受光することができる。
【0026】
すなわち、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測信号(電気信号)を、第1信号変換器4及び第2信号変換器10を介して制御監視部12へ確実に伝達することができる。この結果、計測信号の伝達手段としてスリップリングやテレメトリーシステムなどを設ける必要はなく、計測監視装置の小型軽量化を図ることが容易となる。また、本実施形態に係る計測監視装置によれば、軸受が支持する回転軸の回転速度(回転数)による制約を受けることがなく、回転軸が高速回転し、かかる軸受が当該高速回転軸を支持する場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0027】
さらに、かかる計測監視装置によれば、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測結果(電気信号)が、発光素子6から受光素子8へ光パルス信号として受信されているため、例えば、ジェットエンジン内部などのように、油ミストなどが飛散されている過酷な環境下に軸受が配設されるような場合であっても、光パルス信号の優れた直進性により、計測結果を制御監視部12へ確実に伝達させることができる。これにより、かかる過酷な環境下に配設された軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0028】
ここで、このような計測監視装置においては、当該計測監視装置が搭載される回転機械装置の使用目的や使用条件などに基づく装置構成に応じて、任意の構造を成す軸受を計測監視対象とすることができる。図1(b)には、その軸受構造の一例が本発明の第1実施形態として示されている。
【0029】
図1(b)に示す構成において、計測監視対象となる軸受は、相対回転可能に対向して配置された一対の軌道輪20,22のうち、外輪22がハウジング40に固定されて常時静止する静止輪として構成されているとともに、内輪20が回転軸42に固定されて当該回転軸42とともに、外輪22に対して回転する回転輪として構成されている。内輪20には、その外周部に軌道面(内輪軌道面)20aが形成されているとともに、外輪22には、その内周部に内輪軌道面20aと対向して軌道面(外輪軌道面)22aが形成されており、これらの軌道面20a,22a間に複数の転動体(一例として、円筒ころ)24が転動可能に組み込まれている。
【0030】
この場合、転動体(円筒ころ)24は、環状を成す保持器26に形成されたポケットに1つずつ回転自在に保持された状態で内外輪20,22間に組み込まれ、内外輪軌道面20a,22a間を転動している。これにより、各転動体24は、その転動面が相互に接触することなく内外輪軌道面20a,22a間を転動することができ、結果として、当該各転動体24が相互に接触して摩擦が生じることによる回転抵抗の増大や、焼付きなどを防止することができる。
【0031】
なお、内輪20には、内輪軌道面20aの両側に、その全周に亘って鍔部20bが設けられており、当該鍔部20bによって、各転動体(円筒ころ)24が軸方向に対して位置決めされている。ここで、図1(b)には、内輪20に鍔部20bを設けた構成を例示しているが、同様の鍔部を内輪に代えて、あるいはこれに加えて外輪に対して設けた構成としてもよい。
【0032】
また、図1(b)に示す構成においては、転動体24として円筒ころが内外輪20,22間に組み込まれているが、かかる円筒ころに代えて、円錐ころや球面ころなどを転動体として内外輪20,22間に組み込んでもよいし、あるいは、転動体として玉を内外輪20,22間に組み込んだ構成としてもよい。その際、転動体列は、図1(b)に示すような単列構成であってもよいし、2列以上の複列構成であってもよい。
【0033】
さらに、転動体24を回転自在に保持する保持器26は、当該転動体24の種類に応じて各種のタイプを任意に選択して適用すればよい。例えば、転動体が各種のころ(円筒ころ(図1(b))、円錐ころ及び球面ころなど)である場合、もみ抜き型、くし型及びかご型などのタイプを適用することができ、転動体が玉である場合、波型や冠型などのタイプを適用することができる。
【0034】
本実施形態において、かかる軸受には、回転輪である内輪20に対し、当該内輪20とともに回転するセンサ2が設けられている。この場合、内輪20には、センサ2を取り付けるために軸方向の一端側(図1(b)の右端側)を凹状に窪ませて成る取付部20gが形成されており、当該取付部20gに収容されることで、センサ2が内輪20に対して取り付けられている。
【0035】
なお、センサ2としては、軸受(具体的には、内輪20)の回転時における温度を検知し、軸受温度の変化を計測する温度センサや、当該回転時における歪みや振動を検知し、軸受歪みや軸受振動の変動を計測するための歪センサや振動センサなどを想定している。その際、センサ2の数は特に限定されず、計測監視装置の使用目的や使用条件などに基づいて設定される軸受に対する回転状態の計測精度に応じて、1つのみ、あるいは複数設ければよい。なお、センサ2を複数設ける場合、すべてを同種のセンサ(例えば、温度センサ、歪センサや振動センサなど)としてもよいし、各種のセンサを混在させてもよい。
【0036】
さらに、取付部20gの大きさや形状は、センサ2の大きさや形状に応じて当該センサ2を取り付け可能となるように任意に設定すればよい。例えば、内輪20の一端側(図1(b)の右端側)の所定位置を円形や矩形の穴状に窪ませた構成であってもよいし、当該一端側の全周に亘って連続して溝状に窪ませた構成であってもよい。あるいは、取付部20gを形成することなく、センサ2を内輪20の一端面(図1(b)の右端面)に直接取り付けた構成としてもよい。いずれの場合であっても、センサ2は、内輪20(取付部20g)の大きさや形状などに応じ、当該内輪20(取付部20g)に対して嵌合、接着、溶接、あるいは締結など任意の手段によって取り付ければよい。
【0037】
また、回転軸42には、その軸端側(図1(b)の右端側)へ、第1信号変換器4が当該回転軸42の軸心C上に設けられており、当該第1信号変換器4の発光素子6が前記回転軸42の軸端から露出され、その発光方向(同図の左から右へ向かう方向)が前記軸心Cの延長線と重なるように位置付けられている。これに対し、第2信号変換器10は、その受光方向(図1(b)の左から右へ向かう方向)が発光素子6の発光方向と同一となるように受光素子8を位置付けた状態で、装置外部の常に静止状態に保たれた部位に設ければよい。また、制御監視部12は、第2信号変換器10から出力された電気信号を受信することが可能であれば、その配設箇所は特に限定されず、装置外部の常に静止状態に保たれた任意の部位に設ければよい。
【0038】
その際、センサ2と第1信号変換器、第1信号変換器4と発光素子6、及び第2信号変換器10と受光素子8のそれぞれの接続手段は特に限定されず、軸受及び回転軸の大きさや形状などに応じて任意の手段で接続させればよい。一例として、図1(b)に示す構成においては、センサ2と第1信号変換器とを信号ケーブルによって接続させているのに対し、発光素子6を第1信号変換器4の制御基板上に直接接続させているとともに、受光素子8を第2信号変換器10の制御基板上に直接接続させている。
なお、かかる構成に代えて、例えば、第1信号変換器4と発光素子6とを信号ケーブルによって接続させ、当該第1信号変換器4のみを回転軸42の軸心C上からずらした部位(一例として、回転軸42の外周部など)に配設させた構成としてもよい。
【0039】
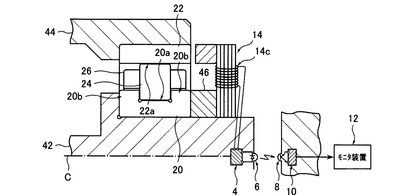
ここで、軸受構造は、図1(b)に示す構成には限定されず、例えば、図2に示すような本発明の第2実施形態に係る構成であってもよい。この場合、基本的な軸受構造は、上述した第1実施形態に係る軸受(図1(b))と同様であるため、図面上では、これと同一若しくは類似の構成部材に同一符号を付しており、以下の説明では、これらの説明は省略若しくは簡略化する。
【0040】
図2に示す構成において、計測監視対象となる軸受は、内輪20が回転軸(以下、内輪軸という)42に固定されて当該内輪軸42とともに、外輪22に対して回転する回転輪として構成されているのに対し、外輪22が回転軸(以下、外輪軸という)44に固定されて当該外輪軸44とともに、内輪20に対して回転する回転輪として構成されている。
【0041】
かかる軸受には、回転輪である内輪20に対し、当該内輪20とともに回転するセンサ14が設けられている。センサ14としては、軸受(具体的には、内輪20)の回転速度を計測するための速度センサなどを想定している。例えば、図2に示す構成においては、絶縁材を円環状に形成し、当該円環状体に周方向へ沿って複数の貫通孔を所定間隔(例えば、等間隔)で穿孔した後、隣り合う貫通孔間の柱部に対して導線を巻回させて複数のコイル14cが形成されており、一種の磁気センサが構成されている。この場合、センサ14は、その内周部を内輪軸42の外周面に当接させて当該回転軸42に固定されるとともに、環状の取付部材46を介して内輪20の軸方向の一側面(図2の右側面)に固定されることで、コイル14cが転動体24及び保持器26といずれも接触することなく、内輪軸42及び内輪20とともに回転する構造となっている。
【0042】
センサ14をこのような構成とすることで、例えば、転動体24や保持器26などを各種の磁性材で構成した場合、当該センサ14の回転中、コイル14cにはかかる転動体24や保持器26によって発生された磁力が作用し、当該コイル14cに対して所定の誘導電圧(誘導電流)を生じさせることができる。その際、かかる転動体24や保持器26によって発生する磁力の強さは、センサ14、並びにこれらの転動体24及び保持器26の回転に伴って連続的に変化することとなる。したがって、センサ14によって回転時における誘導電圧(誘導電流)の強さを検知し、制御監視部12において単位時間当たりの内輪20の位置や角度などの変動量を演算処理することで、当該内輪20、すなわち軸受の回転速度を計測することができる。
【0043】
なお、センサ2の内輪軸42、あるいは内輪2に対する取付手段(固定手段)は特に限定されず、当該内輪軸42及び内輪2の大きさや形状などに応じて、例えば嵌合、接着、溶接あるいは締結など任意の手段で取り付ければよい。
【0044】
上述した本発明の第1実施形態(図1(b))、並びに第2実施形態に係る計測診断装置(図2)においては、第1信号変換器4(発光素子6)、及び第2信号変換器10(受光素子8)をいずれも回転軸(内輪軸)42の軸心C近傍(すなわち、アキシアル方向)に設けた構成としているが、これらの相対的な位置関係は、発光素子6と受光素子8とが、回転する発光素子6によって発せられた光信号がその発信時における当該回転方向への位相を移動させることなく(すなわち、光信号が常に定位置から発信され)、静置された受光素子によって常に受光可能となるように相対配置されている限り、任意に設定することができる。
【0045】
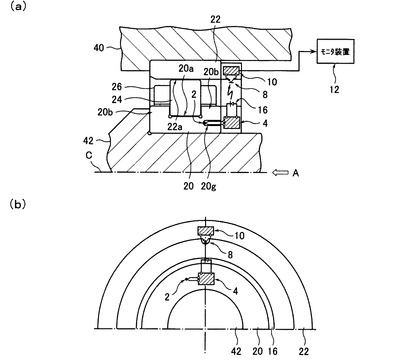
図3(a),(b)には、発光素子16と受光素子8とを軸心C方向(アキシアル方向)ではなく、径方向(ラジアル方向)に相対配置した本発明の第3実施形態に係る計測監視装置が示されており、以下、その構成について説明する。なお、この場合、計測監視対象となる軸受の構造は、上述した第1実施形態に係る軸受(図1(b))と同様であるため、これについては特に説明しない。また、軸受の設計変更も第1実施形態と同様に適宜可能である。加えて、計測監視装置の基本的な構成も第1実施形態と同様であるため、同一若しくは類似の構成部材には同一符号を付し、以下ではこれらの説明を省略若しくは簡略化する。
【0046】
本実施形態に係る計測監視装置には、センサ2、第1信号変換器4、第2信号変換器10、並びに制御監視部12が備えられ、これらにより軸受の回転状態の計測監視が行われていることは、上述した第1実施形態に係る計測監視装置(図1(b))と同様である。
【0047】
図3(a),(b)に示す構成において、センサ2及び第1信号変換器4は、相対回転する一方の軌道輪(内輪)20に設けられ、発光素子16は、環状構造を成し、その発光方向(同図(a)の下から上へ向かう方向)が放射方向へ沿うように位置付けられている。これに対し、第2信号変換器10は、他方の軌道輪(外輪)22に設けられ、受光素子8は、その受光方向(図3(a)の下から上へ向かう方向)が発光素子16の発光方向の少なくとも一方向と同一方向となるように位置付けられているとともに、制御監視部12は、装置外部の常に静止状態に保たれた部位に設けられている。なお、本実施形態においても、第2信号変換器10(受光素子8)は、1つだけ計測監視装置に設ければよい。
【0048】
この場合、発光素子16は、その内径寸法が内輪20の外径寸法と略同一寸法を成すとともに、その外径寸法が外輪22の内径寸法よりも小さな寸法を成す環状に構成されており、光信号をその全周に亘って放射方向(全放射線の延出方向(以下、全放射線方向という))へ同時に発信することができる構造となっている。なお、発光素子16は、その全体が光信号を全放射線方向へ同時に発信可能な構成とすればよいが、複数の発光素子(例えば、上述した第1実施形態に係る発光素子6)を連続して並べて環状に配設し、各発光素子からそれぞれの放射線方向へ同時に光信号を発信させることで、全周に亘って光信号が発信される構成としてもよい。
【0049】
そして、第1信号変換器4を内輪20の軸方向の一側面(図3(a)の右側面)に設けるとともに、発光素子16を当該一側面に取り付けることで、当該発光素子16を当該内輪20とともに回転させることができ、当該内輪20の外周部よりも拡径方向へ突出させることで、その発光方向(同図の下から上へ向かう方向)が内輪20から外輪22へ向かう方向(すなわち、ラジアル方向)へ沿うように位置付けることができる。
【0050】
これに対し、第2信号変換器10は、その受光方向(図3(a)の下から上へ向かう方向)が発光素子16の発光方向と同一となるように受光素子8を位置付けた状態で、常に静止状態に保たれた外輪22の軸方向の一側面(同図の右側面)に設ければよい。また、制御監視部12は、装置外部の常に静止状態に保たれた任意の部位、例えば、外輪22が固定されるハウジング40などに設ければよい。
【0051】
これにより、発光素子16は、回転軸42とともに回転されるが、環状構造を成しているため、当該発光素子16から発せられた光信号は、全放射線方向へ同時に発信され、その位相が当該発光素子16の回転方向へ移動することがない。すなわち、発光素子16から発せられた光信号は、常に当該発光素子16の全放射線方向へ向かって同時に直進することとなる。したがって、その受光方向を発光素子16の発光方向の少なくとも一方向と同一方向となるように受光素子8を位置付け、計測監視装置の外部に静置することで、受光素子8が1つのみであっても、当該受光素子8によって発光素子16から発せられた光信号を常に受光することができる。
【0052】
これにより、センサ2によって計測された軸受の回転状態(軸受の温度、歪みや振動、転動体の回転数など)を示す計測信号(電気信号)を、第1信号変換器4及び第2信号変換器10を介して制御監視部12へ確実に伝達することができる。この結果、計測監視装置の小型軽量化を図ることが容易となるだけでなく、回転軸が高速回転し、かかる軸受が当該高速回転軸を支持する場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【0053】
また、センサ2によって計測された軸受の回転状態を示す計測結果(電気信号)が、発光素子16から受光素子8へ光パルス信号として受信されているため、油ミストなどが飛散されている過酷な環境下(ジェットエンジンなど)に軸受が配設されるような場合であっても、当該軸受の回転状態を正確、且つ高精度に計測監視することができる。
【図面の簡単な説明】
【0054】
【図1】本発明の第1実施形態に係る軸受回転状態計測監視装置を説明するための図であって、(a)は、装置構成を処理の流れとともに模式的に示した図、(b)は、装置構成を模式的に示した断面図。
【図2】本発明の第2実施形態に係る軸受回転状態計測監視装置の構成を模式的に示した断面図。
【図3】本発明の第3実施形態に係る軸受回転状態計測監視装置を説明するための図であって、(a)は、装置構成を模式的に示した断面図、(b)は、同図(a)の矢印A方向から見た平面図。
【符号の説明】
【0055】
2 センサ
4 第1信号変換器
6 発光素子
8 受光素子
10 第2信号変換器
12 制御監視部
20 内輪
22 外輪
24 転動体
26 保持器
40 ハウジング
42 回転軸
C 軸心
【特許請求の範囲】
【請求項1】
少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受の回転状態を計測監視するための軸受回転状態計測監視装置であって、
転がり軸受の回転状態を計測し、その計測結果を電気信号として出力するセンサ部と、当該センサ部から出力された電気信号に基づいて発光素子を発光させることで、当該電気信号を光信号に変換して出力する第1の信号変換部と、前記発光素子によって発せられた光信号を受光素子により受光し、当該受光素子によって受光された光信号を電気信号に変換して出力する第2の信号変換部と、当該第2の信号変換部から出力された電気信号を受信し、前記軸受の回転状態を把握するために当該電気信号に基づいて演算処理を行うとともに、当該回転状態を監視する制御監視部とを備えており、
前記第1の信号変換部の発光素子は、前記回転軸の軸心に沿って回転しているのに対し、前記第2の信号変換部の受光素子は静置され、前記発光素子と受光素子とは、当該回転する発光素子によって発せられた光信号が、その発信時における前記回転方向への位相を移動させることなく、静置された受光素子によって常に受光可能となるような位置関係を成して相対配置されていることを特徴とする軸受回転状態計測監視装置。
【請求項2】
前記センサ部は、前記相対回転する一方の軌道輪に設けられ、前記第1の信号変換部は、前記発光素子の発光方向が前記回転軸の軸心と重なるように、当該軸心近傍に設けられているのに対し、前記第2の信号変換部及び制御監視部は、装置外部の常に静止状態に保たれた部位に設けられ、前記受光素子は、その受光方向が前記発光素子の発光方向と同一方向となるように位置付けられていることを特徴とする請求項1に記載の軸受回転状態計測監視装置。
【請求項3】
前記センサ部及び第1の信号変換部は、前記相対回転する一方の軌道輪に設けられ、前記発光素子は、環状構造を成し、その発光方向が放射方向へ沿うように位置付けられているのに対し、前記第2の信号変換部は、前記他方の軌道輪に設けられ、前記受光素子は、その受光方向が前記発光素子の発光方向の少なくとも一方向と同一方向となるように位置付けられているとともに、前記制御監視部は、装置外部の常に静止状態に保たれた部位に設けられていることを特徴とする請求項1に記載の軸受回転状態計測監視装置。
【請求項4】
与えられたアナログの電気信号をデジタル電気信号に変換して出力する第3の信号変換部を備えており、
前記センサ部は、転がり軸受の回転状態の計測結果をアナログの電気信号として出力して前記第3の信号変換部へ与え、前記第3の信号変換部は、前記センサ部から与えられたアナログ電気信号をデジタル電気信号に変換して前記第1の信号変換部へ出力し、当該第1の信号変換部は、前記第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力していることを特徴とする請求項1〜3のいずれかに記載の軸受回転状態計測監視装置。
【請求項1】
少なくとも一方が他方に対して相対回転可能に対向して配置された一対の軌道輪と、当該軌道輪間に転動自在に組み込まれた複数の転動体とを備え、回転軸を回転可能に支持する転がり軸受の回転状態を計測監視するための軸受回転状態計測監視装置であって、
転がり軸受の回転状態を計測し、その計測結果を電気信号として出力するセンサ部と、当該センサ部から出力された電気信号に基づいて発光素子を発光させることで、当該電気信号を光信号に変換して出力する第1の信号変換部と、前記発光素子によって発せられた光信号を受光素子により受光し、当該受光素子によって受光された光信号を電気信号に変換して出力する第2の信号変換部と、当該第2の信号変換部から出力された電気信号を受信し、前記軸受の回転状態を把握するために当該電気信号に基づいて演算処理を行うとともに、当該回転状態を監視する制御監視部とを備えており、
前記第1の信号変換部の発光素子は、前記回転軸の軸心に沿って回転しているのに対し、前記第2の信号変換部の受光素子は静置され、前記発光素子と受光素子とは、当該回転する発光素子によって発せられた光信号が、その発信時における前記回転方向への位相を移動させることなく、静置された受光素子によって常に受光可能となるような位置関係を成して相対配置されていることを特徴とする軸受回転状態計測監視装置。
【請求項2】
前記センサ部は、前記相対回転する一方の軌道輪に設けられ、前記第1の信号変換部は、前記発光素子の発光方向が前記回転軸の軸心と重なるように、当該軸心近傍に設けられているのに対し、前記第2の信号変換部及び制御監視部は、装置外部の常に静止状態に保たれた部位に設けられ、前記受光素子は、その受光方向が前記発光素子の発光方向と同一方向となるように位置付けられていることを特徴とする請求項1に記載の軸受回転状態計測監視装置。
【請求項3】
前記センサ部及び第1の信号変換部は、前記相対回転する一方の軌道輪に設けられ、前記発光素子は、環状構造を成し、その発光方向が放射方向へ沿うように位置付けられているのに対し、前記第2の信号変換部は、前記他方の軌道輪に設けられ、前記受光素子は、その受光方向が前記発光素子の発光方向の少なくとも一方向と同一方向となるように位置付けられているとともに、前記制御監視部は、装置外部の常に静止状態に保たれた部位に設けられていることを特徴とする請求項1に記載の軸受回転状態計測監視装置。
【請求項4】
与えられたアナログの電気信号をデジタル電気信号に変換して出力する第3の信号変換部を備えており、
前記センサ部は、転がり軸受の回転状態の計測結果をアナログの電気信号として出力して前記第3の信号変換部へ与え、前記第3の信号変換部は、前記センサ部から与えられたアナログ電気信号をデジタル電気信号に変換して前記第1の信号変換部へ出力し、当該第1の信号変換部は、前記第3の信号変換部から出力されたデジタル電気信号に基づいて発光素子を発光させることで、当該デジタル電気信号を光パルス信号に変換して出力していることを特徴とする請求項1〜3のいずれかに記載の軸受回転状態計測監視装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−20013(P2009−20013A)
【公開日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願番号】特願2007−183363(P2007−183363)
【出願日】平成19年7月12日(2007.7.12)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願日】平成19年7月12日(2007.7.12)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]