
軸受状態監視装置及び方法
【課題】電動機軸受状態監視システムを提供する。
【解決手段】監視システムは磁化された組立体(200,240,350)を含み、該組立体は、シャフト(400,440)と、前記シャフトに結合された第1の軸受レース(202,242,354)と、複数の軸受玉(206,246)と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レース(204,244,358)とを含む。前記磁化された組立体の一部分は、それについて符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサ(214,254,360)と、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニット(215,249,361)とを含む。
【解決手段】監視システムは磁化された組立体(200,240,350)を含み、該組立体は、シャフト(400,440)と、前記シャフトに結合された第1の軸受レース(202,242,354)と、複数の軸受玉(206,246)と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レース(204,244,358)とを含む。前記磁化された組立体の一部分は、それについて符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサ(214,254,360)と、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニット(215,249,361)とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に云えば、軸受電流に関し、より具体的には、軸受の状態を監視するシステム及び方法に関するものである。
【背景技術】
【0002】
電動機のような回転機械は、典型的にはシャフトを支持する軸受を含んでおり、また、このような回転機械は、典型的には軸受電流に起因した異常な軸受摩耗を起こしやすい。典型的には、回転機械は、電磁誘導、内部電圧源からの静電結合、及び外部電圧源からの静電結合のような、軸受電流を引き起こすことができる様々な既知のシャフト電圧源の影響を受け易いことがある。電流自身は、例えば、電動機シャフトの中心を通過する軸方向磁束として、又は電動機シャフトに結合する交番磁束として現れる得る。軸受電流は、機械が直流機又は交流機であるか否かに拘わらず、また機械が小馬力又は大馬力の電動機であるか否かに拘わらず生じ得る。
【0003】
シャフトの軸方向磁束は、例えば、シャフトを取り巻く不平衡なアンペア・ターンによって、又は破損した回転子バーによって、又残留磁化によって、又は偏心した空隙によって生成される。交番磁束は、例えば、固定子又は回転子鉄心の非対称磁気特性に起因して、又は対称でない電動機内の磁束経路を惹起する非均質な鋼材に起因して生じ得る。上記のような電流は、軸受玉及びレースを通る放電を引き起こして、それらから潤滑剤の中へ金属を転移させることによって、回転機械内の軸受の早期故障を引き起こし得る。この金属損失は、孔食、窪み、及び表面内の凹凸を生じさせ、これにより軸受電流を増大させる。軸受電流が増大すると、その効果として、摩擦熱を増大させ、動作中の軸受の温度を増大させ、また最終的に軸受を故障させる傾向がある。
【0004】
この増大した軸受電流の効果は、材料特性、構成要素の許容公差、磁気構成要素の非対称性などを改善することによって、ある程度軽減することが可能である。しかしながら、今日の様々な用途に使用されている電気駆動装置の多くは、可変速度駆動装置(VSD)であり、それらは、IGBT及びMOSFETのような高速スイッチング・パルス幅(PWM)半導体素子を含む電力変換装置の使用を必要としている。(数MHzの遷移又はそれ以上までの)高い動作周波数では、容量結合電流が、通常は電気絶縁体と見なし得る経路を通って流れることができる。例えば、磁石巻線絶縁体、固定子スロット・ライナ、電動機空隙、軸受グリース、及び固定子頂部スティックを通って電流が流れることができる。このような場合、動作周波数が高くなると、軸受内部の電流の流れの問題が悪化し、ひいては早期の故障を招く。従って、電動機設計を改善して早期故障の傾向を低減する努力にも拘わらず、軸受はそれを通る電流が高周波動作に起因して悪化する虞がある。
【0005】
破滅的な故障が生じる前に軸受を修理し又は交換するように事前対策として是正処置を取るために、軸受内の損傷の進行を間接的に監視することができる。しかしながら、このような方法は、典型的には、ブラシ又は高価な外部装置の使用を必要としており、このような外部装置は、例えば、単に音響ノイズのような軸受状態の間接的な表示を生じるに過ぎないことがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第7243557号
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って、上述した欠点を克服するような軸受の状態を監視する装置及び方法を提供することが望ましい。
【課題を解決するための手段】
【0008】
本発明の一面に従って、電動機軸受状態監視システムは組立体を含み、該組立体は、シャフトと、前記シャフトに結合された第1の軸受レースと、複数の軸受玉と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レースとを含む。前記組立体の一部分は、符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサと、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニットとを含む。
【0009】
本発明の別の面に従って、方法は、第1の軸受レース、第2の軸受レース及び軸受シャフトの内の少なくとも1つを有する軸受組立体の複数の構成要素を設ける段階と、前記複数の構成要素の内の1つの構成要素の少なくとも一部分を磁気的に符号化する段階と、軸受組立体の前記複数の構成要素を一緒に組み立てる段階と、軸受組立体の動作中に前記磁気的に符号化された部分の近くの軸受電流から生じる磁化の乱れについて磁界を監視し、且つ該監視された磁界に基づいて軸受組立体の故障を予測するように、制御装置を構成する段階と、を含む。
【0010】
本発明の別の面に従って、装置は、シャフトと、前記シャフトに結合された第1の軸受レースと、前記シャフトに結合された第2の軸受レースと、前記第1の軸受レース及び前記第2の軸受レースの間に位置決めされた複数の軸受玉とを含む。前記シャフト、前記第1の軸受レースの一部分及び前記第2の軸受レースの一部分の内の1つは、本質的に単一方向の磁気分極を持つように磁気的に符号化されている。
【0011】
様々な他の特徴及び利点が、以下の詳しい説明及び図面から明らかになろう。
【0012】
図面は、本発明を実施するために現在考えられる実施形態を例示している。
【図面の簡単な説明】
【0013】
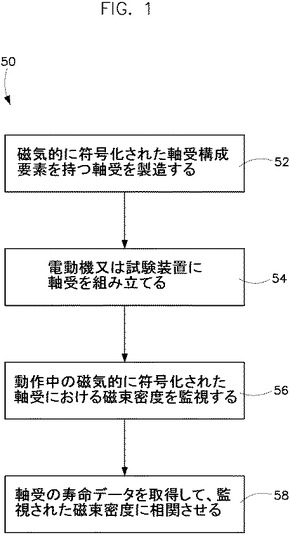
【図1】図1は、本発明の様々な実施形態を取り入れた、軸受寿命データを取得するための方法を例示する流れ図である。
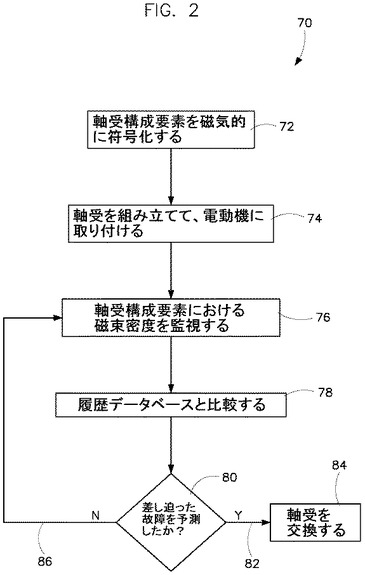
【図2】図2は、本発明の様々な実施形態を取り入れた、軸受状態データを取得するための方法を例示する流れ図である。
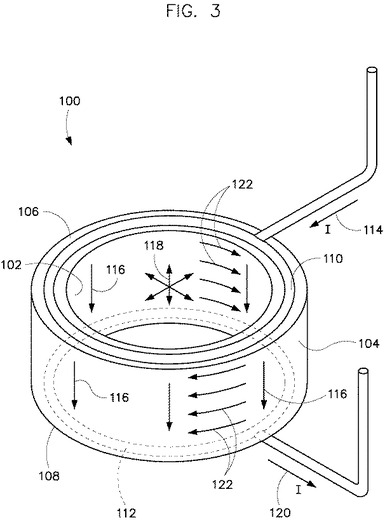
【図3】図3は、本発明の一実施形態に従ったころ軸受のための磁気的に符号化されたリングを例示する略図である。
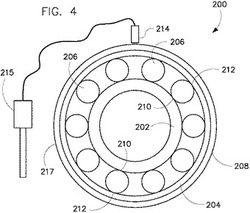
【図4】図4は、本発明の一実施形態に従った外側の磁気的に符号化されたリングを持つころ軸受を例示する略図である。
【図5】図5は、本発明の一実施形態に従った内側の磁気的に符号化されたリングを持つころ軸受を例示する略図である。
【図6】図6は、本発明の一実施形態に従ったスラスト軸受のための磁気的に符号化されたリングを例示する略図である。
【図7】図7は、本発明の一実施形態に従った符号化されたリングを持つスラスト軸受を例示する略図である。
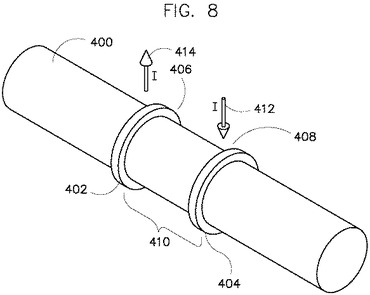
【図8】図8は、本発明の一実施形態に従った磁気的に符号化されたシャフトを例示する略図である。
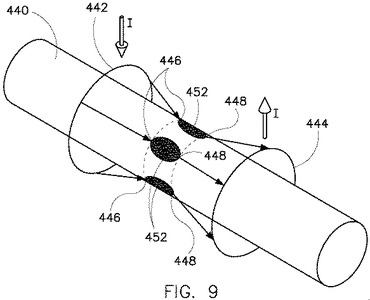
【図9】図9は、本発明の一実施形態に従った磁気的に符号化されたシャフトを例示する略図である。
【発明を実施するための形態】
【0014】
電動機内の軸受の状態を監視するためのシステム及び方法を教示する。しかしながら、当業者には、本発明が、軸受の玉を通過する電流を生じる他の回転装置にも等しく適用できることが認められよう。従って、電動機を含む実施形態について本発明を説明するが、当業者には、本書で呈示する本発明が、電動機に制限する必要はなく、むしろそれを通過する軸受電流の影響を受け易い軸受を持つ任意の回転装置にも適用し得ることが認められよう。更に、後で例示するように、本書で説明する発明の実施形態は、磁気的に符号化されていて、1つ以上の軸受レースに結合され又は取り付けられるリングを含む。しかしながら、後で述べるように、別の実施形態では、自身が磁気的に符号化することのできる強磁性材料であるレース又は他の構成要素を含み、これにより別個の磁気的に符号化されたリングを取り付けることを必要としない。
【0015】
本発明の実施形態によれば、電動機の軸受構成要素を磁気的に符号化して、これを用いて、軸受の故障を予測するために電動機内の軸受の状態を監視することができる。軸受電流が軸受の耐用期間中に増大するにつれて、軸受電流は磁気敵に符号化された構成要素(1つ又は複数)の磁化を乱し且つ該磁化に影響を及ぼす。従って、履歴的に取得されたデータを使用すことによって、磁気的に符号化された構成要素を用いた軸受電流の監視により軸受の状態が求められ、該軸受の状態は、本発明の実施形態によれば、軸受の故障の前に軸受を事前対策として交換するために用いることができる。履歴的に取得されたデータは、現場で(すなわち、顧客の所在地などにある機能ユニット内で)取得された監視及び故障データに基づいたものであってよく、或いは、例えば、試験所内の試験装置で取得された監視及び故障データに基づいたものであってよい。
【0016】
そこで、図1について説明すると、流れ図50は、本発明の一実施形態に従って軸受状態データを取得する方法の概要を例示する。流れ図50は、軸受を製造する段階52から始まる。各々の軸受は1つ以上の磁気的に符号化されが軸受構成要素を持ち、且つ各々の軸受は本質的に単一の磁化方向を持つ。本発明の実施形態では、軸受構成要素(1つ又は複数)は永久的に符号化される。これは、軸受構成要素(1つ又は複数)がそれに対するパルス電流の印加後に磁化を保持することを意味する。しかしながら、当業者には、このような「永久的な」磁化は当該技術分野で通常理解されているように同様に消磁することができることが認められよう。
【0017】
磁気的に符号化された軸受構成要素としては、本発明の実施形態で説明するように、1つ以上の軸受レース及び磁気的に符号化された軸受シャフトを挙げることができる。段階54で、軸受が電動機及び/又は試験装置の中に組み立てられる。このような組み立てには、磁気的に符号化された軸受構成要素(1つ又は複数)に近接して磁界センサ(1つ又は複数)を配置することが含まれる。段階56で、磁気的に符号化された軸受構成要素(1つ又は複数)の近くの磁束密度が軸受の耐用期間中に監視されて記録される。前に述べたように、軸受は、例えば、「現場」における装置内にあるものでよく、或いは、試験所内の試験装置内にあるものでよい。このような態様では、軸受の寿命データを、故障による早期寿命から軸受の進歩につれて監視し取得する。従って、段階58で、軸受電流の関数として一群の軸受寿命データが取得され、これは、磁束密度を介して上記磁気的に符号化された軸受構成要素(1つ又は複数)の近くで測定された磁界の乱れの関数である。
【0018】
このような場合、軸受電流の関数である磁界の乱れに基づいたものである履歴軸受寿命データベースを、集成して連続的に構築することができる。従って、一群の履歴データが構築されたとき、符号化された軸受構成要素の近くでの磁界の乱れは、軸受の故障を事前対策として予測するために軸受状態を直接的に監視するために用いることができる。当業者に理解され得るように、このような予測は、例えば、磁束密度の絶対測定値に基づいて行うことができ、又は磁束密度の時間につれての変化に基づいて行うことができる。更に、最初に符号化された磁界の磁束線の方向で上記符号化された軸受構成要素(1つ又は複数)における磁束密度を測定するのが好ましいが、最初に符号化された磁界の磁束線に近接してそれらに関して3つのユークリッド3空間ベクトルの内の2つにおいて又は3つ全てにおいても測定することによって追加の測定値情報を生じさせることができる。また更に、後で説明するように、磁気的に符号化される軸受構成要素は、構成要素について且つ測定場所について、複数の軸受種類又は複数の軸受構成を含むことができる。従って、各々の軸受構成について、当業者に理解され得るように、履歴軸受データベースを、各々の独自の構成、測定場所及び測定配向について生成することができる。
【0019】
ここで、図2について説明すると、プロセス70は、本発明の実施形態に従って少なくとも1つの軸受構成要素が本質的に単一方向の磁気分極を持つように磁気的に符号化されるようにする段階72を含む。段階72での符号化の後、段階74で軸受が組み立てられて、電動機に取り付けられる。軸受構成要素における磁束密度が段階76で測定され且つ監視されて、段階78で、履歴データベース、例えば、図1に関して説明したように取得されたデータベースと比較される。軸受の状態は、履歴データベースに基づいて、また明らかになってきた履歴の理解に基づいて、決定される。従って、段階80で、軸受の故障が差し迫っているのか又は近い将来に故障しそうであるかどうかについて予測が行われる。このような予測は、例えば計画的な点検保守期間中に電動機内の軸受を事前対策として交換するために用いることができ、或いは、このような予測は、例えば破滅的な軸受故障を防止するために用いることができる。更に、このような監視は、電気装置のその場所で行うことができ、或いは、処理ユニットを介して、又はコンピュータを介して、又はインターネットを介して遠隔で監視することができる。従って、軸受故障が差し迫っているか又は近い将来に起こると予測された場合(段階82)、軸受は段階84で事前対策として交換することができる。しかしながら、軸受故障が予測されなかった場合(段階86)、段階76で、システムは軸受構成要素における磁束密度を監視続けることができる。
【0020】
図3は、本発明の一実施形態に従ったリングの磁気符号化を例示する。図示のように、リング100は強磁性材料であって、内面102及び外面104を含む。リング100は第1の軸方向の面106及び第2の軸方向の面108も含む。リング100を磁気的に符号化するために、第1のリング電極110が第1の軸方向の面106に接触して配置され、且つ第2のリング電極112が第2の軸方向の面108に接触して配置される。パルス電流114が第1のリング電極110に印加され、その結果、実質的に軸方向118にリング100を通過する電流密度ベクトル116が生じて、戻り電流120として流れる。従って、電流密度ベクトル116を通した後、リング100には電流密度ベクトル116に対して垂直である平行な磁化線122が生じる。このような場合、リング100は磁気的に符号化されて、例えば、軸受状態を監視するために、図4及び図5に例示されているようにころ軸受に用いることができる。例示された実施形態では、リング100は、軸受の状態を監視するために用いることのできる接地経路内で軸受レースに締りばめ又はその他の方法で取り付けることができる。
【0021】
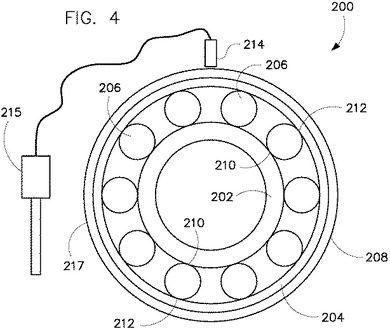
図4について説明すると、本発明に従って電動機(図示せず)に使用することのできるころ軸受200を例示している。ころ軸受200は、内レース202と、外レース204と、それらの間に位置決めされた複数の軸受玉206とを含む。ころ軸受組立体200は磁気的に符号化されたリング208を含み、該リング208は接地経路内にあって、前に図3に例示したような態様で符号化されている。各々の玉は、レース202,204とそれぞれの接触点210,212で接触する。従って、動作中、軸受電流が軸受玉を通過する。軸受電流は磁気的に符号化されたリング208の中の磁化を乱れさせ、その乱れは、リングに近接して位置決めされた磁界センサ214を介して検出することができる。図4について説明すると、磁界センサ214は、例示されているように、平行な磁化線122のような磁力線の乱れを検出するために、ころ軸受組立体200の外部に且つその外周217に接戦方向に又は垂直に位置決めされる。従って、磁界センサ214は、外周217に接線方向又は垂直である方向における磁化122の乱れを検出するように位置決めされる。しかしながら、前に述べたように、磁界センサ214と同様な追加の磁界センサをさらに使用して、該追加の磁界センサを第1のセンサの配向に対して垂直に配向することによって、磁界の乱れを検出し且つ測定することができる。従って、前に説明したように、これらの乱れは履歴的に得られたデータと比較することができ、且つころ軸受組立体200の状態を監視するために用いることができる。一実施形態では、磁界センサ214は信号調整処理ユニット215に接続され、この信号調整処理ユニット215は、例えばコンピュータを介してアクセスすることができ、また更にころ軸受組立体200の状態を監視するために遠隔からアクセスすることができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0022】
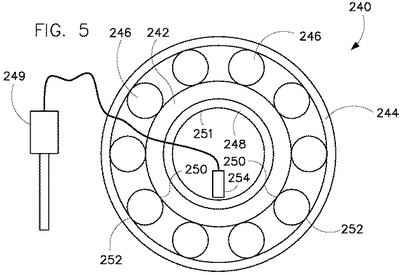
図4と同様に、図5は、本発明の別の実施形態に従って、軸受240の状態を監視するために電動機に使用することができるころ軸受240を例示する。ころ軸受組立体240は、内レース242と、外レース244と、それらの間に位置決めされた複数の玉246とを含む。ころ軸受組立体240は磁気的に符号化されたリング248を含み、該リング248は、接地経路内にあり且つ前に図3に例示したような態様で符号化されている内周251を持つ。各々の玉はレース242,244にそれぞれの接触点250,252で接触する。従って、動作中、軸受電流が軸受玉を通過する。このような軸受電流は磁気的に符号化されたリング248の中の磁化を乱れさせ、その乱れは、リングに近接して位置決めされた磁界センサ254を介して検出することができる。更に、例示されているように、磁界センサ254は、図4に関して述べたのと同様に磁界の乱れを検出するように且つ内周251に対して接線方向又は垂直である方向に位置決めされる。しかしながら、前に述べたように、磁界センサ254と同様な追加の磁界センサをさらに使用して、該追加の磁界センサを第1のセンサの配向に対して垂直に配向することによって、磁界の乱れを検出し且つ測定することができる。従って、前に説明したように、これらの乱れは履歴的に得られたデータと比較することができ、且つころ軸受組立体240の状態を監視するために用いることができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0023】
図4及び図5の例示された実施形態の各々は、単一の磁気的に符号化されたリングを持つものとして示されている。しかしながら、当業者には、各々のころ軸受内に2つ以上の磁気的に符号化されたリングを含むことができることが認められよう。従って、本発明の実施形態によれば、ころ軸受は、図4の磁気的に符号化されたリング208のような外側リングと図5の磁気的に符号化されたリング248のような内側リングとの両方を持つことができる。これにより、軸受状態データを両方の位置において且つ各位置で複数の配向において得ることができ、従って、ころ軸受の状態を監視するための追加の情報が提供される。
【0024】
更に、図4の磁気的に符号化されたリング208及び図5の磁気的に符号化されたリング248は、それぞれのレース204,242とは別個であってそれらに結合されたリングとして示されているが、本発明の実施形態には、別個のリング208,248を設ける代わりにそれらのレース自体を磁化することが含まれる。このような実施形態では、レース(1つ又は複数)は、磁気的に符号化することができる強磁性材料で製作して、接地経路内に配置することにより、前に述べたように磁界センサにより軸受状態の監視を可能にすることができる。従って、本発明の実施形態によれば、レース自体を、図3に関して説明した態様に磁気的に符号化することができる。このような場合、ころ軸受組立体の内レース、外レース、又は両方のレースを磁化して、信号調整処理ユニット249によって監視することにより、軸受電流及び軸受の状態の表示を提供することができる。
【0025】
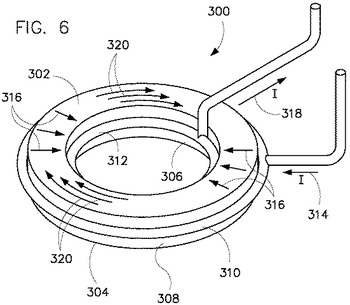
軸受構成はころ軸受組立体に制限する必要はなく、スラスト軸受のような他の軸受構成を含むことができる。従って、本発明の別の実施形態において、図6及び図7は本発明の実施形態に従ったスラスト軸受を例示する。図3に関して説明したように符号化されたリングと類似した態様で、リングを磁気的に符号化することができる。しかしながら、スラスト軸受内の玉及びレースはころ軸受とは異なる配向を持つので、リングは、図3に例示されたものに対して90°の角度に配向された磁気分極を持つように符号化される。
【0026】
そこで、図6について説明すると、スラスト軸受に使用するための強磁性リング300が、内面306及び外面308と共に、第1の軸方向の面302及び第2の軸方向の面304を含む。リング300を磁気的に符号化するために、第1のリング電極310が外面308と接触状態に配置され、且つ第2のリング電極312がリング300の内面306と接触状態に配置される。パルス電流314が第1のリング電極310に印加されると、その結果、実質的に半径方向にリング300を通過する電流密度ベクトル316が生じて、戻り電流318として流れる。従って、電流密度ベクトル316を通した後では、概して平行な線を持つ磁化320が生じ、これは単一の分極を持つ。このような場合、リング300は符号化して、例えば、軸受状態を監視するために図7に例示されているようにスラスト軸受に用いることができる。図4及び図5に例示された実施形態と同様に、このような監視は磁化320の線に対して1つの、2つの、又は3つ全ての配向で行うことができる。図示の実施形態では、リング300は、軸受の状態を監視するために使用することができる接地経路内に軸受レースを機械的に取り付けることができる。
【0027】
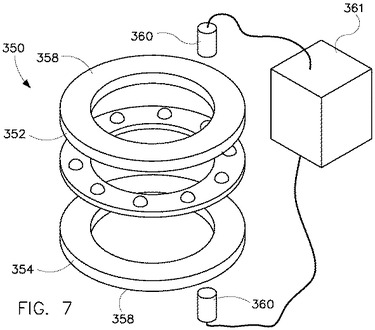
図7について説明すると、本発明の実施形態に従って電動機(図示せず)に使用することのできるスラスト軸受350を示している。スラスト軸受350は、第1のスラスト軸受レース352と、第2のスラスト軸受レース354と、それらの間に位置決めされた複数の軸受玉356とを含む。スラスト軸受350は、接地経路内にあって、各々が図6に関して前に説明したような態様で符号化されている1つ以上の磁気的に符号化されたリング358を含む。各々の玉356は、スラスト軸受レース352,354にそれぞれの接触点(図示せず)で接触する。従って、動作中、軸受電流が軸受玉356を通過する。このような軸受電流は1つ以上の磁気的に符号化されたリング358における磁界を乱れさせ、その乱れは、リングに近接して位置決めされたそれぞれの磁界センサ360によって検出して、信号調整処理ユニット361によって監視することができる。従って、前に説明したように、それらの乱れは履歴的に得られたデータと比較することができ且つスラスト軸受350の状態を監視するために使用することができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0028】
その上、ころ軸受の実施形態に関して前に説明したように、スラスト軸受350は、リング358を用いる代わりに、リング352,354自体(一方又は両方)を強磁性材料で製作して符号化するように製造することができる。 従って、このような実施形態では、リング352,354が符号化されて、前に述べたように磁界センサ360を使用してリングにおける軸受電流を監視することができる。
【0029】
本発明の実施形態では、軸受自体の代わりに、電動機用の強磁性シャフトを磁気的に符号化することができ、シャフト磁界の乱れを監視することにより軸受状態を監視することができる。ここで図8を参照して説明すると、シャフト400が2つのシャフト処理保持クランプ(SPHC)402,404を含み、これらのSPHCは計画された検知用符号化領域410のそれぞれの境界406,408に配置され、その検知用符号化領域410にはそれを覆うようにころ軸受(図示せず)のような軸受を配置することができる。この実施形態では、パルス電流がSPHC404でシャフトに流入(412)することができ、またSPHC402でシャフトから流出(414)することができる。これにより、領域410は本質的に単一方向の磁気分極を持つ一様に符号化された領域になり、これは本実施形態に従って軸受電流監視のために用いることができる。更に、シャフト400内の磁化の深さは、印加されるパルスの周波数及び持続期間を制御することによって制御することができる。従って、短い電流パルスを印加することによって、シャフト400の最も外側の層に高い電流密度が生じ、また最も外側の層のみを磁化することによって、大きな電流を印加することを必要とせずに高い電流密度を達成することができる。
【0030】
次に図9を参照して説明すると、本発明の別の実施形態に従って、シャフト440を複数の区域に分けて磁気的に符号化することができる。電極が軸受から充分な距離を置いて取り付けられている場合、その軸受区域は充分一様になるように磁気的に符号化して、本質的に単一方向の磁気分極を持つようにすることができる。従って、個々の円周方向に配置された電流入口点の間の間隔がシャフトの直径に対して比較的大きいとき(また円周方向に配置された電流出口点の間の間隔が同様に大きいとき)、回転信号の一様性が悪くなる。このような場合には、パルス電流で符号化される区域の長さを出来る限り大きくする必要があり、さもないと、生成される磁界が円周方向に一様でなくなる虞がある。本実施形態によれば、パルス電流で符号化される区域が充分に長い場合、本質的に単一方向の磁気分極を生成する一様な電流分布が達成される。
【0031】
そこで、本実施形態によれば、シャフト440は、第1の電極442と、第2の電極444と、第1の電極442に電気接続された複数の電気入力接点446とを含む。また、第2の電極444に複数の電気出力接点448が接続されている。従って、パルス電流450が第1の電極442に印加されたとき、パルス電流は電気接点446を介してシャフト440へ入り、そして電気出力接点448を介して第2の電極444へ出て行くようにされる。このような場合、本実施形態によれば、シャフト440内に複数の磁気的に符号化された領域452を生成することができ、それらの各領域はその中に実質的に一様な磁束を持ち、また各領域は単一の一様な磁化を持つ。このような場合、それに近接した磁束密度の乱れを監視することによって、軸受状態を監視することができる。
【0032】
従って、シャフトは、図8及び図9の模範的な例に示されているように、本発明に従って磁気的に符号化することができる。そこで、磁化の後、本書で説明したように軸受電流を監視することができ、そして更に、符号化されたシャフトの周りに位置決めされた軸受の状態を、履歴的に得られたデータに基づいて推測することができる。このような場合、また、軸受の寿命を監視して、軸受が配置されている機械の動作期間中に軸受を事前対策として交換することができる。
【0033】
当業者には、本書に示した実施形態が単なる模範例であり、且つ本発明が軸受電流の影響を受け易い軸受を持つ任意の電動機構成に適用し得ることが認められよう。従って、軸受玉を通過する電流密度に対して垂直である磁束密度を持つように軸受の構成要素を磁気的に符号化することによって、軸受の状態を監視することができ、且つ軸受の状態を、履歴的に得られたデータに基づいて使用して、軸受の寿命(耐用期間)及びその故障を予測することができる。
【0034】
例示した実施形態では、磁界センサは、符号化された構成要素(例えば、図4の符号化されたリング208)に近接して位置決めされるものとして示されている。本発明の実施形態では、センサ(1つ又は複数)は該構成要素から0〜10mm、好ましくは5mmまでの位置に配置するのが望ましい。更に、例示した実施形態では、システムの構成要素を組み立てている間に、磁界のマッピングを行うことができる。本発明の実施形態では、磁界センサは、構成要素内に埋め込むことのできる受動性装置とすることができる。一例として、図5は、内周251の内側に位置決めされた磁界センサ254を例示している。しかしながら、このような実施形態は、内周251と接触してその中に位置決めされたシャフト(図示せず)を含むことがある。そこで、このような実施形態では、磁界センサ254はシャフト内に埋め込んで、軸受電流の検出のために周期的に監視することができる。本発明の実施形態では、磁気検知は、回転子−シャフト系が部分的に又は完全に分解されている間に行うことができる。従って、1つ以上のこのようなセンサが使用されているシステムは部分的に又は完全に分解することができ、また磁界センサ254のようなセンサは、軸受の状態を確めるために処理ユニット249に接続することができる。埋め込んだセンサを持つ本発明の実施形態では、軸受の状態を確める期間の間に使用される配線のためのプラグを設けることができる。この実施形態では、軸受は、通常動作中、軸受状態の連続的な監視を行わずに動作させることができる。次いで、状態監視の期間中は、システムを分解して、その状態を測定し決定するためにプラグを処理ユニットに取り付けることができる。
【0035】
更に、大形の軸受又は大形のシャフト(例えば、風力タービン用途)の場合、シャフト及び軸受構成要素の全体を磁気的に符号化する必要はない。そこで、一例として図3を再度参照して説明すると、各電極110,112がリング100の360°の円周全体を覆うものとして例示されているが、これらの電極がリング100の実質的に同じ領域を取り囲み且つ実質的に互いに対して向かい合っている限り、リング100の円周の一部分のみを磁気的に符号化することが可能である。円周の量又は部分は、関連した軸受電流の大きさに基づいて選択することができる。そこで、関連した軸受電流が充分な大きさである場合、該軸受電流はリング自体の限られた円周部分に生じる。従って、部分的な符号化は、全体の符号化の場合より技術的努力が少なくて済み、一例として、必要な符号化電流を低減することによって製造コストを単純化する。大形のシャフト/軸受設計の場合には、部分的な符号化はより低いコストで適用することができ、且つ磁気的検査により軸受電流を検出するために全く同じ態様で使用することができる。
【0036】
開示した方法及び装置についての技術的貢献は、軸受の状態を監視するコンピュータ具現化システム及び方法が提供されることである。
【0037】
本発明の一実施形態によれば、電動機軸受状態監視システムは組立体を含み、該組立体は、シャフトと、前記シャフトに結合された第1の軸受レースと、複数の軸受玉と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レースとを含む。前記組立体の一部分は、符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサと、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニットとを含む。
【0038】
本発明の別の実施形態によれば、方法は、第1の軸受レース、第2の軸受レース及び軸受シャフトの内の少なくとも1つを有する軸受組立体の複数の構成要素を設ける段階と、前記複数の構成要素の内の1つの構成要素の少なくとも一部分を磁気的に符号化する段階と、軸受組立体の前記複数の構成要素を一緒に組み立てる段階と、軸受組立体の動作中に前記磁気的に符号化された部分の近くの軸受電流から生じる磁化の乱れについて磁界を監視し、且つ該監視された磁界に基づいて軸受組立体の故障を予測するように、制御装置を構成する段階と、を含む。
【0039】
本発明の別の実施形態によれば、装置は、シャフトと、前記シャフトに結合された第1の軸受レースと、前記シャフトに結合された第2の軸受レースと、前記第1の軸受レース及び前記第2の軸受レースの間に位置決めされた複数の軸受玉とを含む。前記シャフト、前記第1の軸受レースの一部分及び前記第2の軸受レースの一部分の内の1つは、本質的に単一方向の磁気分極を持つように磁気的に符号化されている。
【0040】
以上、本発明を限られた数の実施形態のみに関連して詳しく説明したが、本発明がこのような開示した実施形態に制限されるものではないことを理解されたい。むしろ、本発明は、これまで説明していないが本発明の精神及び範囲に相応する任意の数の変形、変更、置換又は等価な構成を取り入れるように修正することができる。従って、本発明の様々な実施形態を説明したが、本発明の様々な面が説明した実施形態の幾つかのみを含み得ることを理解されたい。従って、本発明は上記の説明によって制限されるものと考えるべきではなく、「特許請求の範囲」によって制限される。
【符号の説明】
【0041】
50 流れ図
70 プロセス
100 リング
102 内面
104 外面
106 第1の軸方向の面
108 第2の軸方向の面
110 第1のリング電極
112 第2のリング電極
114 パルス電流
116 電流密度ベクトル
118 軸方向
120 戻り電流
122 平行な磁化線
200 ころ軸受
202 内レース
204 外レース
206 軸受玉
208 磁気的に符号化されたリング
210 接触点
212 接触点
214 磁界センサ
215 信号調整処理ユニット
217 外周
240 ころ軸受組立体
242 内レース
244 外レース
246 玉
248 磁気的に符号化されたリング
249 信号調整処理ユニット
250 接触点
251 内周
252 接触点
254 磁界センサ
300 強磁性リング
302 第1の軸方向の面
304 第2の軸方向の面
306 内面
308 外面
310 第1のリング電極
312 第2のリング電極
314 パルス電流
316 電流密度ベクトル
318 戻り電流
320 磁化
350 スラスト軸受
352 第1のスラスト軸受レース
354 第2のスラスト軸受レース
356 軸受玉
358 磁気的に符号化されたリング
360 磁界センサ
361 信号調整処理ユニット
400 シャフト
402 シャフト処理保持クランプ(SPHC)
404 シャフト処理保持クランプ(SPHC)
406 境界
408 境界
410 検知用符号化領域
412 流入電流
414 流出電流
440 シャフト
442 第1の電極
444 第2の電極
446 電気入力接点
448 電気出力接点
450 パルス電流
452 磁気的に符号化された領域
【技術分野】
【0001】
本発明は、一般的に云えば、軸受電流に関し、より具体的には、軸受の状態を監視するシステム及び方法に関するものである。
【背景技術】
【0002】
電動機のような回転機械は、典型的にはシャフトを支持する軸受を含んでおり、また、このような回転機械は、典型的には軸受電流に起因した異常な軸受摩耗を起こしやすい。典型的には、回転機械は、電磁誘導、内部電圧源からの静電結合、及び外部電圧源からの静電結合のような、軸受電流を引き起こすことができる様々な既知のシャフト電圧源の影響を受け易いことがある。電流自身は、例えば、電動機シャフトの中心を通過する軸方向磁束として、又は電動機シャフトに結合する交番磁束として現れる得る。軸受電流は、機械が直流機又は交流機であるか否かに拘わらず、また機械が小馬力又は大馬力の電動機であるか否かに拘わらず生じ得る。
【0003】
シャフトの軸方向磁束は、例えば、シャフトを取り巻く不平衡なアンペア・ターンによって、又は破損した回転子バーによって、又残留磁化によって、又は偏心した空隙によって生成される。交番磁束は、例えば、固定子又は回転子鉄心の非対称磁気特性に起因して、又は対称でない電動機内の磁束経路を惹起する非均質な鋼材に起因して生じ得る。上記のような電流は、軸受玉及びレースを通る放電を引き起こして、それらから潤滑剤の中へ金属を転移させることによって、回転機械内の軸受の早期故障を引き起こし得る。この金属損失は、孔食、窪み、及び表面内の凹凸を生じさせ、これにより軸受電流を増大させる。軸受電流が増大すると、その効果として、摩擦熱を増大させ、動作中の軸受の温度を増大させ、また最終的に軸受を故障させる傾向がある。
【0004】
この増大した軸受電流の効果は、材料特性、構成要素の許容公差、磁気構成要素の非対称性などを改善することによって、ある程度軽減することが可能である。しかしながら、今日の様々な用途に使用されている電気駆動装置の多くは、可変速度駆動装置(VSD)であり、それらは、IGBT及びMOSFETのような高速スイッチング・パルス幅(PWM)半導体素子を含む電力変換装置の使用を必要としている。(数MHzの遷移又はそれ以上までの)高い動作周波数では、容量結合電流が、通常は電気絶縁体と見なし得る経路を通って流れることができる。例えば、磁石巻線絶縁体、固定子スロット・ライナ、電動機空隙、軸受グリース、及び固定子頂部スティックを通って電流が流れることができる。このような場合、動作周波数が高くなると、軸受内部の電流の流れの問題が悪化し、ひいては早期の故障を招く。従って、電動機設計を改善して早期故障の傾向を低減する努力にも拘わらず、軸受はそれを通る電流が高周波動作に起因して悪化する虞がある。
【0005】
破滅的な故障が生じる前に軸受を修理し又は交換するように事前対策として是正処置を取るために、軸受内の損傷の進行を間接的に監視することができる。しかしながら、このような方法は、典型的には、ブラシ又は高価な外部装置の使用を必要としており、このような外部装置は、例えば、単に音響ノイズのような軸受状態の間接的な表示を生じるに過ぎないことがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第7243557号
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って、上述した欠点を克服するような軸受の状態を監視する装置及び方法を提供することが望ましい。
【課題を解決するための手段】
【0008】
本発明の一面に従って、電動機軸受状態監視システムは組立体を含み、該組立体は、シャフトと、前記シャフトに結合された第1の軸受レースと、複数の軸受玉と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レースとを含む。前記組立体の一部分は、符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサと、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニットとを含む。
【0009】
本発明の別の面に従って、方法は、第1の軸受レース、第2の軸受レース及び軸受シャフトの内の少なくとも1つを有する軸受組立体の複数の構成要素を設ける段階と、前記複数の構成要素の内の1つの構成要素の少なくとも一部分を磁気的に符号化する段階と、軸受組立体の前記複数の構成要素を一緒に組み立てる段階と、軸受組立体の動作中に前記磁気的に符号化された部分の近くの軸受電流から生じる磁化の乱れについて磁界を監視し、且つ該監視された磁界に基づいて軸受組立体の故障を予測するように、制御装置を構成する段階と、を含む。
【0010】
本発明の別の面に従って、装置は、シャフトと、前記シャフトに結合された第1の軸受レースと、前記シャフトに結合された第2の軸受レースと、前記第1の軸受レース及び前記第2の軸受レースの間に位置決めされた複数の軸受玉とを含む。前記シャフト、前記第1の軸受レースの一部分及び前記第2の軸受レースの一部分の内の1つは、本質的に単一方向の磁気分極を持つように磁気的に符号化されている。
【0011】
様々な他の特徴及び利点が、以下の詳しい説明及び図面から明らかになろう。
【0012】
図面は、本発明を実施するために現在考えられる実施形態を例示している。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の様々な実施形態を取り入れた、軸受寿命データを取得するための方法を例示する流れ図である。
【図2】図2は、本発明の様々な実施形態を取り入れた、軸受状態データを取得するための方法を例示する流れ図である。
【図3】図3は、本発明の一実施形態に従ったころ軸受のための磁気的に符号化されたリングを例示する略図である。
【図4】図4は、本発明の一実施形態に従った外側の磁気的に符号化されたリングを持つころ軸受を例示する略図である。
【図5】図5は、本発明の一実施形態に従った内側の磁気的に符号化されたリングを持つころ軸受を例示する略図である。
【図6】図6は、本発明の一実施形態に従ったスラスト軸受のための磁気的に符号化されたリングを例示する略図である。
【図7】図7は、本発明の一実施形態に従った符号化されたリングを持つスラスト軸受を例示する略図である。
【図8】図8は、本発明の一実施形態に従った磁気的に符号化されたシャフトを例示する略図である。
【図9】図9は、本発明の一実施形態に従った磁気的に符号化されたシャフトを例示する略図である。
【発明を実施するための形態】
【0014】
電動機内の軸受の状態を監視するためのシステム及び方法を教示する。しかしながら、当業者には、本発明が、軸受の玉を通過する電流を生じる他の回転装置にも等しく適用できることが認められよう。従って、電動機を含む実施形態について本発明を説明するが、当業者には、本書で呈示する本発明が、電動機に制限する必要はなく、むしろそれを通過する軸受電流の影響を受け易い軸受を持つ任意の回転装置にも適用し得ることが認められよう。更に、後で例示するように、本書で説明する発明の実施形態は、磁気的に符号化されていて、1つ以上の軸受レースに結合され又は取り付けられるリングを含む。しかしながら、後で述べるように、別の実施形態では、自身が磁気的に符号化することのできる強磁性材料であるレース又は他の構成要素を含み、これにより別個の磁気的に符号化されたリングを取り付けることを必要としない。
【0015】
本発明の実施形態によれば、電動機の軸受構成要素を磁気的に符号化して、これを用いて、軸受の故障を予測するために電動機内の軸受の状態を監視することができる。軸受電流が軸受の耐用期間中に増大するにつれて、軸受電流は磁気敵に符号化された構成要素(1つ又は複数)の磁化を乱し且つ該磁化に影響を及ぼす。従って、履歴的に取得されたデータを使用すことによって、磁気的に符号化された構成要素を用いた軸受電流の監視により軸受の状態が求められ、該軸受の状態は、本発明の実施形態によれば、軸受の故障の前に軸受を事前対策として交換するために用いることができる。履歴的に取得されたデータは、現場で(すなわち、顧客の所在地などにある機能ユニット内で)取得された監視及び故障データに基づいたものであってよく、或いは、例えば、試験所内の試験装置で取得された監視及び故障データに基づいたものであってよい。
【0016】
そこで、図1について説明すると、流れ図50は、本発明の一実施形態に従って軸受状態データを取得する方法の概要を例示する。流れ図50は、軸受を製造する段階52から始まる。各々の軸受は1つ以上の磁気的に符号化されが軸受構成要素を持ち、且つ各々の軸受は本質的に単一の磁化方向を持つ。本発明の実施形態では、軸受構成要素(1つ又は複数)は永久的に符号化される。これは、軸受構成要素(1つ又は複数)がそれに対するパルス電流の印加後に磁化を保持することを意味する。しかしながら、当業者には、このような「永久的な」磁化は当該技術分野で通常理解されているように同様に消磁することができることが認められよう。
【0017】
磁気的に符号化された軸受構成要素としては、本発明の実施形態で説明するように、1つ以上の軸受レース及び磁気的に符号化された軸受シャフトを挙げることができる。段階54で、軸受が電動機及び/又は試験装置の中に組み立てられる。このような組み立てには、磁気的に符号化された軸受構成要素(1つ又は複数)に近接して磁界センサ(1つ又は複数)を配置することが含まれる。段階56で、磁気的に符号化された軸受構成要素(1つ又は複数)の近くの磁束密度が軸受の耐用期間中に監視されて記録される。前に述べたように、軸受は、例えば、「現場」における装置内にあるものでよく、或いは、試験所内の試験装置内にあるものでよい。このような態様では、軸受の寿命データを、故障による早期寿命から軸受の進歩につれて監視し取得する。従って、段階58で、軸受電流の関数として一群の軸受寿命データが取得され、これは、磁束密度を介して上記磁気的に符号化された軸受構成要素(1つ又は複数)の近くで測定された磁界の乱れの関数である。
【0018】
このような場合、軸受電流の関数である磁界の乱れに基づいたものである履歴軸受寿命データベースを、集成して連続的に構築することができる。従って、一群の履歴データが構築されたとき、符号化された軸受構成要素の近くでの磁界の乱れは、軸受の故障を事前対策として予測するために軸受状態を直接的に監視するために用いることができる。当業者に理解され得るように、このような予測は、例えば、磁束密度の絶対測定値に基づいて行うことができ、又は磁束密度の時間につれての変化に基づいて行うことができる。更に、最初に符号化された磁界の磁束線の方向で上記符号化された軸受構成要素(1つ又は複数)における磁束密度を測定するのが好ましいが、最初に符号化された磁界の磁束線に近接してそれらに関して3つのユークリッド3空間ベクトルの内の2つにおいて又は3つ全てにおいても測定することによって追加の測定値情報を生じさせることができる。また更に、後で説明するように、磁気的に符号化される軸受構成要素は、構成要素について且つ測定場所について、複数の軸受種類又は複数の軸受構成を含むことができる。従って、各々の軸受構成について、当業者に理解され得るように、履歴軸受データベースを、各々の独自の構成、測定場所及び測定配向について生成することができる。
【0019】
ここで、図2について説明すると、プロセス70は、本発明の実施形態に従って少なくとも1つの軸受構成要素が本質的に単一方向の磁気分極を持つように磁気的に符号化されるようにする段階72を含む。段階72での符号化の後、段階74で軸受が組み立てられて、電動機に取り付けられる。軸受構成要素における磁束密度が段階76で測定され且つ監視されて、段階78で、履歴データベース、例えば、図1に関して説明したように取得されたデータベースと比較される。軸受の状態は、履歴データベースに基づいて、また明らかになってきた履歴の理解に基づいて、決定される。従って、段階80で、軸受の故障が差し迫っているのか又は近い将来に故障しそうであるかどうかについて予測が行われる。このような予測は、例えば計画的な点検保守期間中に電動機内の軸受を事前対策として交換するために用いることができ、或いは、このような予測は、例えば破滅的な軸受故障を防止するために用いることができる。更に、このような監視は、電気装置のその場所で行うことができ、或いは、処理ユニットを介して、又はコンピュータを介して、又はインターネットを介して遠隔で監視することができる。従って、軸受故障が差し迫っているか又は近い将来に起こると予測された場合(段階82)、軸受は段階84で事前対策として交換することができる。しかしながら、軸受故障が予測されなかった場合(段階86)、段階76で、システムは軸受構成要素における磁束密度を監視続けることができる。
【0020】
図3は、本発明の一実施形態に従ったリングの磁気符号化を例示する。図示のように、リング100は強磁性材料であって、内面102及び外面104を含む。リング100は第1の軸方向の面106及び第2の軸方向の面108も含む。リング100を磁気的に符号化するために、第1のリング電極110が第1の軸方向の面106に接触して配置され、且つ第2のリング電極112が第2の軸方向の面108に接触して配置される。パルス電流114が第1のリング電極110に印加され、その結果、実質的に軸方向118にリング100を通過する電流密度ベクトル116が生じて、戻り電流120として流れる。従って、電流密度ベクトル116を通した後、リング100には電流密度ベクトル116に対して垂直である平行な磁化線122が生じる。このような場合、リング100は磁気的に符号化されて、例えば、軸受状態を監視するために、図4及び図5に例示されているようにころ軸受に用いることができる。例示された実施形態では、リング100は、軸受の状態を監視するために用いることのできる接地経路内で軸受レースに締りばめ又はその他の方法で取り付けることができる。
【0021】
図4について説明すると、本発明に従って電動機(図示せず)に使用することのできるころ軸受200を例示している。ころ軸受200は、内レース202と、外レース204と、それらの間に位置決めされた複数の軸受玉206とを含む。ころ軸受組立体200は磁気的に符号化されたリング208を含み、該リング208は接地経路内にあって、前に図3に例示したような態様で符号化されている。各々の玉は、レース202,204とそれぞれの接触点210,212で接触する。従って、動作中、軸受電流が軸受玉を通過する。軸受電流は磁気的に符号化されたリング208の中の磁化を乱れさせ、その乱れは、リングに近接して位置決めされた磁界センサ214を介して検出することができる。図4について説明すると、磁界センサ214は、例示されているように、平行な磁化線122のような磁力線の乱れを検出するために、ころ軸受組立体200の外部に且つその外周217に接戦方向に又は垂直に位置決めされる。従って、磁界センサ214は、外周217に接線方向又は垂直である方向における磁化122の乱れを検出するように位置決めされる。しかしながら、前に述べたように、磁界センサ214と同様な追加の磁界センサをさらに使用して、該追加の磁界センサを第1のセンサの配向に対して垂直に配向することによって、磁界の乱れを検出し且つ測定することができる。従って、前に説明したように、これらの乱れは履歴的に得られたデータと比較することができ、且つころ軸受組立体200の状態を監視するために用いることができる。一実施形態では、磁界センサ214は信号調整処理ユニット215に接続され、この信号調整処理ユニット215は、例えばコンピュータを介してアクセスすることができ、また更にころ軸受組立体200の状態を監視するために遠隔からアクセスすることができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0022】
図4と同様に、図5は、本発明の別の実施形態に従って、軸受240の状態を監視するために電動機に使用することができるころ軸受240を例示する。ころ軸受組立体240は、内レース242と、外レース244と、それらの間に位置決めされた複数の玉246とを含む。ころ軸受組立体240は磁気的に符号化されたリング248を含み、該リング248は、接地経路内にあり且つ前に図3に例示したような態様で符号化されている内周251を持つ。各々の玉はレース242,244にそれぞれの接触点250,252で接触する。従って、動作中、軸受電流が軸受玉を通過する。このような軸受電流は磁気的に符号化されたリング248の中の磁化を乱れさせ、その乱れは、リングに近接して位置決めされた磁界センサ254を介して検出することができる。更に、例示されているように、磁界センサ254は、図4に関して述べたのと同様に磁界の乱れを検出するように且つ内周251に対して接線方向又は垂直である方向に位置決めされる。しかしながら、前に述べたように、磁界センサ254と同様な追加の磁界センサをさらに使用して、該追加の磁界センサを第1のセンサの配向に対して垂直に配向することによって、磁界の乱れを検出し且つ測定することができる。従って、前に説明したように、これらの乱れは履歴的に得られたデータと比較することができ、且つころ軸受組立体240の状態を監視するために用いることができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0023】
図4及び図5の例示された実施形態の各々は、単一の磁気的に符号化されたリングを持つものとして示されている。しかしながら、当業者には、各々のころ軸受内に2つ以上の磁気的に符号化されたリングを含むことができることが認められよう。従って、本発明の実施形態によれば、ころ軸受は、図4の磁気的に符号化されたリング208のような外側リングと図5の磁気的に符号化されたリング248のような内側リングとの両方を持つことができる。これにより、軸受状態データを両方の位置において且つ各位置で複数の配向において得ることができ、従って、ころ軸受の状態を監視するための追加の情報が提供される。
【0024】
更に、図4の磁気的に符号化されたリング208及び図5の磁気的に符号化されたリング248は、それぞれのレース204,242とは別個であってそれらに結合されたリングとして示されているが、本発明の実施形態には、別個のリング208,248を設ける代わりにそれらのレース自体を磁化することが含まれる。このような実施形態では、レース(1つ又は複数)は、磁気的に符号化することができる強磁性材料で製作して、接地経路内に配置することにより、前に述べたように磁界センサにより軸受状態の監視を可能にすることができる。従って、本発明の実施形態によれば、レース自体を、図3に関して説明した態様に磁気的に符号化することができる。このような場合、ころ軸受組立体の内レース、外レース、又は両方のレースを磁化して、信号調整処理ユニット249によって監視することにより、軸受電流及び軸受の状態の表示を提供することができる。
【0025】
軸受構成はころ軸受組立体に制限する必要はなく、スラスト軸受のような他の軸受構成を含むことができる。従って、本発明の別の実施形態において、図6及び図7は本発明の実施形態に従ったスラスト軸受を例示する。図3に関して説明したように符号化されたリングと類似した態様で、リングを磁気的に符号化することができる。しかしながら、スラスト軸受内の玉及びレースはころ軸受とは異なる配向を持つので、リングは、図3に例示されたものに対して90°の角度に配向された磁気分極を持つように符号化される。
【0026】
そこで、図6について説明すると、スラスト軸受に使用するための強磁性リング300が、内面306及び外面308と共に、第1の軸方向の面302及び第2の軸方向の面304を含む。リング300を磁気的に符号化するために、第1のリング電極310が外面308と接触状態に配置され、且つ第2のリング電極312がリング300の内面306と接触状態に配置される。パルス電流314が第1のリング電極310に印加されると、その結果、実質的に半径方向にリング300を通過する電流密度ベクトル316が生じて、戻り電流318として流れる。従って、電流密度ベクトル316を通した後では、概して平行な線を持つ磁化320が生じ、これは単一の分極を持つ。このような場合、リング300は符号化して、例えば、軸受状態を監視するために図7に例示されているようにスラスト軸受に用いることができる。図4及び図5に例示された実施形態と同様に、このような監視は磁化320の線に対して1つの、2つの、又は3つ全ての配向で行うことができる。図示の実施形態では、リング300は、軸受の状態を監視するために使用することができる接地経路内に軸受レースを機械的に取り付けることができる。
【0027】
図7について説明すると、本発明の実施形態に従って電動機(図示せず)に使用することのできるスラスト軸受350を示している。スラスト軸受350は、第1のスラスト軸受レース352と、第2のスラスト軸受レース354と、それらの間に位置決めされた複数の軸受玉356とを含む。スラスト軸受350は、接地経路内にあって、各々が図6に関して前に説明したような態様で符号化されている1つ以上の磁気的に符号化されたリング358を含む。各々の玉356は、スラスト軸受レース352,354にそれぞれの接触点(図示せず)で接触する。従って、動作中、軸受電流が軸受玉356を通過する。このような軸受電流は1つ以上の磁気的に符号化されたリング358における磁界を乱れさせ、その乱れは、リングに近接して位置決めされたそれぞれの磁界センサ360によって検出して、信号調整処理ユニット361によって監視することができる。従って、前に説明したように、それらの乱れは履歴的に得られたデータと比較することができ且つスラスト軸受350の状態を監視するために使用することができる。軸受玉及びレースが老化するにつれて、軸受電流もまた増大する。このような増大は、正常に動作している軸受の磁化された面によって引き起こされる磁界ではなく、該磁化された面の近くの磁界の乱れにより測定することができる。
【0028】
その上、ころ軸受の実施形態に関して前に説明したように、スラスト軸受350は、リング358を用いる代わりに、リング352,354自体(一方又は両方)を強磁性材料で製作して符号化するように製造することができる。 従って、このような実施形態では、リング352,354が符号化されて、前に述べたように磁界センサ360を使用してリングにおける軸受電流を監視することができる。
【0029】
本発明の実施形態では、軸受自体の代わりに、電動機用の強磁性シャフトを磁気的に符号化することができ、シャフト磁界の乱れを監視することにより軸受状態を監視することができる。ここで図8を参照して説明すると、シャフト400が2つのシャフト処理保持クランプ(SPHC)402,404を含み、これらのSPHCは計画された検知用符号化領域410のそれぞれの境界406,408に配置され、その検知用符号化領域410にはそれを覆うようにころ軸受(図示せず)のような軸受を配置することができる。この実施形態では、パルス電流がSPHC404でシャフトに流入(412)することができ、またSPHC402でシャフトから流出(414)することができる。これにより、領域410は本質的に単一方向の磁気分極を持つ一様に符号化された領域になり、これは本実施形態に従って軸受電流監視のために用いることができる。更に、シャフト400内の磁化の深さは、印加されるパルスの周波数及び持続期間を制御することによって制御することができる。従って、短い電流パルスを印加することによって、シャフト400の最も外側の層に高い電流密度が生じ、また最も外側の層のみを磁化することによって、大きな電流を印加することを必要とせずに高い電流密度を達成することができる。
【0030】
次に図9を参照して説明すると、本発明の別の実施形態に従って、シャフト440を複数の区域に分けて磁気的に符号化することができる。電極が軸受から充分な距離を置いて取り付けられている場合、その軸受区域は充分一様になるように磁気的に符号化して、本質的に単一方向の磁気分極を持つようにすることができる。従って、個々の円周方向に配置された電流入口点の間の間隔がシャフトの直径に対して比較的大きいとき(また円周方向に配置された電流出口点の間の間隔が同様に大きいとき)、回転信号の一様性が悪くなる。このような場合には、パルス電流で符号化される区域の長さを出来る限り大きくする必要があり、さもないと、生成される磁界が円周方向に一様でなくなる虞がある。本実施形態によれば、パルス電流で符号化される区域が充分に長い場合、本質的に単一方向の磁気分極を生成する一様な電流分布が達成される。
【0031】
そこで、本実施形態によれば、シャフト440は、第1の電極442と、第2の電極444と、第1の電極442に電気接続された複数の電気入力接点446とを含む。また、第2の電極444に複数の電気出力接点448が接続されている。従って、パルス電流450が第1の電極442に印加されたとき、パルス電流は電気接点446を介してシャフト440へ入り、そして電気出力接点448を介して第2の電極444へ出て行くようにされる。このような場合、本実施形態によれば、シャフト440内に複数の磁気的に符号化された領域452を生成することができ、それらの各領域はその中に実質的に一様な磁束を持ち、また各領域は単一の一様な磁化を持つ。このような場合、それに近接した磁束密度の乱れを監視することによって、軸受状態を監視することができる。
【0032】
従って、シャフトは、図8及び図9の模範的な例に示されているように、本発明に従って磁気的に符号化することができる。そこで、磁化の後、本書で説明したように軸受電流を監視することができ、そして更に、符号化されたシャフトの周りに位置決めされた軸受の状態を、履歴的に得られたデータに基づいて推測することができる。このような場合、また、軸受の寿命を監視して、軸受が配置されている機械の動作期間中に軸受を事前対策として交換することができる。
【0033】
当業者には、本書に示した実施形態が単なる模範例であり、且つ本発明が軸受電流の影響を受け易い軸受を持つ任意の電動機構成に適用し得ることが認められよう。従って、軸受玉を通過する電流密度に対して垂直である磁束密度を持つように軸受の構成要素を磁気的に符号化することによって、軸受の状態を監視することができ、且つ軸受の状態を、履歴的に得られたデータに基づいて使用して、軸受の寿命(耐用期間)及びその故障を予測することができる。
【0034】
例示した実施形態では、磁界センサは、符号化された構成要素(例えば、図4の符号化されたリング208)に近接して位置決めされるものとして示されている。本発明の実施形態では、センサ(1つ又は複数)は該構成要素から0〜10mm、好ましくは5mmまでの位置に配置するのが望ましい。更に、例示した実施形態では、システムの構成要素を組み立てている間に、磁界のマッピングを行うことができる。本発明の実施形態では、磁界センサは、構成要素内に埋め込むことのできる受動性装置とすることができる。一例として、図5は、内周251の内側に位置決めされた磁界センサ254を例示している。しかしながら、このような実施形態は、内周251と接触してその中に位置決めされたシャフト(図示せず)を含むことがある。そこで、このような実施形態では、磁界センサ254はシャフト内に埋め込んで、軸受電流の検出のために周期的に監視することができる。本発明の実施形態では、磁気検知は、回転子−シャフト系が部分的に又は完全に分解されている間に行うことができる。従って、1つ以上のこのようなセンサが使用されているシステムは部分的に又は完全に分解することができ、また磁界センサ254のようなセンサは、軸受の状態を確めるために処理ユニット249に接続することができる。埋め込んだセンサを持つ本発明の実施形態では、軸受の状態を確める期間の間に使用される配線のためのプラグを設けることができる。この実施形態では、軸受は、通常動作中、軸受状態の連続的な監視を行わずに動作させることができる。次いで、状態監視の期間中は、システムを分解して、その状態を測定し決定するためにプラグを処理ユニットに取り付けることができる。
【0035】
更に、大形の軸受又は大形のシャフト(例えば、風力タービン用途)の場合、シャフト及び軸受構成要素の全体を磁気的に符号化する必要はない。そこで、一例として図3を再度参照して説明すると、各電極110,112がリング100の360°の円周全体を覆うものとして例示されているが、これらの電極がリング100の実質的に同じ領域を取り囲み且つ実質的に互いに対して向かい合っている限り、リング100の円周の一部分のみを磁気的に符号化することが可能である。円周の量又は部分は、関連した軸受電流の大きさに基づいて選択することができる。そこで、関連した軸受電流が充分な大きさである場合、該軸受電流はリング自体の限られた円周部分に生じる。従って、部分的な符号化は、全体の符号化の場合より技術的努力が少なくて済み、一例として、必要な符号化電流を低減することによって製造コストを単純化する。大形のシャフト/軸受設計の場合には、部分的な符号化はより低いコストで適用することができ、且つ磁気的検査により軸受電流を検出するために全く同じ態様で使用することができる。
【0036】
開示した方法及び装置についての技術的貢献は、軸受の状態を監視するコンピュータ具現化システム及び方法が提供されることである。
【0037】
本発明の一実施形態によれば、電動機軸受状態監視システムは組立体を含み、該組立体は、シャフトと、前記シャフトに結合された第1の軸受レースと、複数の軸受玉と、前記複数の軸受玉を介して前記第1の軸受レースに結合された第2の軸受レースとを含む。前記組立体の一部分は、符号化された磁界を持つ。本監視システムは、前記磁化された組立体に近接して位置決めされ且つ磁界を測定するように構成された磁界センサと、電流が前記軸受玉を通ることに起因して生じる磁界の変化を前記磁界センサによって検出するように構成された処理ユニットとを含む。
【0038】
本発明の別の実施形態によれば、方法は、第1の軸受レース、第2の軸受レース及び軸受シャフトの内の少なくとも1つを有する軸受組立体の複数の構成要素を設ける段階と、前記複数の構成要素の内の1つの構成要素の少なくとも一部分を磁気的に符号化する段階と、軸受組立体の前記複数の構成要素を一緒に組み立てる段階と、軸受組立体の動作中に前記磁気的に符号化された部分の近くの軸受電流から生じる磁化の乱れについて磁界を監視し、且つ該監視された磁界に基づいて軸受組立体の故障を予測するように、制御装置を構成する段階と、を含む。
【0039】
本発明の別の実施形態によれば、装置は、シャフトと、前記シャフトに結合された第1の軸受レースと、前記シャフトに結合された第2の軸受レースと、前記第1の軸受レース及び前記第2の軸受レースの間に位置決めされた複数の軸受玉とを含む。前記シャフト、前記第1の軸受レースの一部分及び前記第2の軸受レースの一部分の内の1つは、本質的に単一方向の磁気分極を持つように磁気的に符号化されている。
【0040】
以上、本発明を限られた数の実施形態のみに関連して詳しく説明したが、本発明がこのような開示した実施形態に制限されるものではないことを理解されたい。むしろ、本発明は、これまで説明していないが本発明の精神及び範囲に相応する任意の数の変形、変更、置換又は等価な構成を取り入れるように修正することができる。従って、本発明の様々な実施形態を説明したが、本発明の様々な面が説明した実施形態の幾つかのみを含み得ることを理解されたい。従って、本発明は上記の説明によって制限されるものと考えるべきではなく、「特許請求の範囲」によって制限される。
【符号の説明】
【0041】
50 流れ図
70 プロセス
100 リング
102 内面
104 外面
106 第1の軸方向の面
108 第2の軸方向の面
110 第1のリング電極
112 第2のリング電極
114 パルス電流
116 電流密度ベクトル
118 軸方向
120 戻り電流
122 平行な磁化線
200 ころ軸受
202 内レース
204 外レース
206 軸受玉
208 磁気的に符号化されたリング
210 接触点
212 接触点
214 磁界センサ
215 信号調整処理ユニット
217 外周
240 ころ軸受組立体
242 内レース
244 外レース
246 玉
248 磁気的に符号化されたリング
249 信号調整処理ユニット
250 接触点
251 内周
252 接触点
254 磁界センサ
300 強磁性リング
302 第1の軸方向の面
304 第2の軸方向の面
306 内面
308 外面
310 第1のリング電極
312 第2のリング電極
314 パルス電流
316 電流密度ベクトル
318 戻り電流
320 磁化
350 スラスト軸受
352 第1のスラスト軸受レース
354 第2のスラスト軸受レース
356 軸受玉
358 磁気的に符号化されたリング
360 磁界センサ
361 信号調整処理ユニット
400 シャフト
402 シャフト処理保持クランプ(SPHC)
404 シャフト処理保持クランプ(SPHC)
406 境界
408 境界
410 検知用符号化領域
412 流入電流
414 流出電流
440 シャフト
442 第1の電極
444 第2の電極
446 電気入力接点
448 電気出力接点
450 パルス電流
452 磁気的に符号化された領域
【特許請求の範囲】
【請求項1】
A)磁化された組立体(200,240,350)であって、
シャフト(400,440)と、
前記シャフト(400,440)に結合された第1の軸受レース(202,242,354)と、
複数の軸受玉(206,246)と、
前記複数の軸受玉(206,246)を介して前記第1の軸受レース(202,242,354)に結合された第2の軸受レース(204,244,358)と、
を含み、当該磁化された組立体(200,240,350)の一部分が、符号化された磁界を持っている、当該磁化された組立体(200,240,350)と、
B)前記磁化された組立体(200,240,350)に近接して位置決めされ且つ磁界を測定するように構成された磁界センサ(214,254,360)と、
C)電流が前記軸受玉(206,246)を通ることに起因して生じる磁界の変化を前記磁界センサ(214,254,360)によって検出するように構成された処理ユニット(215,249,361)と、
を有している電動機軸受状態監視システム。
【請求項2】
前記磁界が永久的に符号化されている、請求項1記載のシステム。
【請求項3】
前記磁界センサ(214,254,360)は、概して平行な磁力線の磁化を持つ面(208,251)に対して垂直に位置決めされている、請求項1記載のシステム。
【請求項4】
前記磁界センサ(214)は、概して平行な磁力線の磁化を持つ面(217,251)に対して接戦方向に位置決めされている、請求項1記載のシステム。
【請求項5】
前記第1の軸受レース(202,242)が内側の軸受レースを構成し、前記第2の軸受レースが外側の軸受レース(204,244)を構成し、また前記複数の軸受玉(206,246)が前記内側の軸受レースと前記外側の軸受レースとの間に半径方向に位置決めされている、請求項1記載のシステム。
【請求項6】
前記組立体は更に、前記外側の軸受レース(204,244)及び前記内側の軸受レース(202,242)の内の一方に取り付けられた磁気的に符号化されたリング(208,248)を有し、前記磁気的に符号化されたリング(208,248)は、それについて永久的に符号化された磁界を持つ前記組立体の部分を構成している、請求項5記載のシステム。
【請求項7】
前記第1の軸受レースが第1のスラスト軸受レース(354)を構成し、前記第2の軸受レース(358)が第2のスラスト軸受レースを構成し、前記軸受玉が前記第1のスラスト軸受レース(354)と前記第2のスラスト軸受レース(358)との間に軸方向に位置決めされている、請求項1記載のシステム。
【請求項8】
前記システムは、前記第1のスラスト軸受レース(354)及び前記第2のスラスト軸受レース(358)の内の一方に取り付けられた磁気的に符号化されたリング(300)を有し、前記磁気的に符号化されたリング(300)は、それについて永久的に符号化された磁界を持つ前記組立体の部分を構成している、請求項7記載のシステム。
【請求項9】
前記磁化は本質的に唯一つの方向に分極されている、請求項1記載のシステム。
【請求項10】
前記磁界が、前記複数の軸受玉を通る電流密度ベクトルに対して実質的に垂直である、請求項1記載のシステム。
【請求項1】
A)磁化された組立体(200,240,350)であって、
シャフト(400,440)と、
前記シャフト(400,440)に結合された第1の軸受レース(202,242,354)と、
複数の軸受玉(206,246)と、
前記複数の軸受玉(206,246)を介して前記第1の軸受レース(202,242,354)に結合された第2の軸受レース(204,244,358)と、
を含み、当該磁化された組立体(200,240,350)の一部分が、符号化された磁界を持っている、当該磁化された組立体(200,240,350)と、
B)前記磁化された組立体(200,240,350)に近接して位置決めされ且つ磁界を測定するように構成された磁界センサ(214,254,360)と、
C)電流が前記軸受玉(206,246)を通ることに起因して生じる磁界の変化を前記磁界センサ(214,254,360)によって検出するように構成された処理ユニット(215,249,361)と、
を有している電動機軸受状態監視システム。
【請求項2】
前記磁界が永久的に符号化されている、請求項1記載のシステム。
【請求項3】
前記磁界センサ(214,254,360)は、概して平行な磁力線の磁化を持つ面(208,251)に対して垂直に位置決めされている、請求項1記載のシステム。
【請求項4】
前記磁界センサ(214)は、概して平行な磁力線の磁化を持つ面(217,251)に対して接戦方向に位置決めされている、請求項1記載のシステム。
【請求項5】
前記第1の軸受レース(202,242)が内側の軸受レースを構成し、前記第2の軸受レースが外側の軸受レース(204,244)を構成し、また前記複数の軸受玉(206,246)が前記内側の軸受レースと前記外側の軸受レースとの間に半径方向に位置決めされている、請求項1記載のシステム。
【請求項6】
前記組立体は更に、前記外側の軸受レース(204,244)及び前記内側の軸受レース(202,242)の内の一方に取り付けられた磁気的に符号化されたリング(208,248)を有し、前記磁気的に符号化されたリング(208,248)は、それについて永久的に符号化された磁界を持つ前記組立体の部分を構成している、請求項5記載のシステム。
【請求項7】
前記第1の軸受レースが第1のスラスト軸受レース(354)を構成し、前記第2の軸受レース(358)が第2のスラスト軸受レースを構成し、前記軸受玉が前記第1のスラスト軸受レース(354)と前記第2のスラスト軸受レース(358)との間に軸方向に位置決めされている、請求項1記載のシステム。
【請求項8】
前記システムは、前記第1のスラスト軸受レース(354)及び前記第2のスラスト軸受レース(358)の内の一方に取り付けられた磁気的に符号化されたリング(300)を有し、前記磁気的に符号化されたリング(300)は、それについて永久的に符号化された磁界を持つ前記組立体の部分を構成している、請求項7記載のシステム。
【請求項9】
前記磁化は本質的に唯一つの方向に分極されている、請求項1記載のシステム。
【請求項10】
前記磁界が、前記複数の軸受玉を通る電流密度ベクトルに対して実質的に垂直である、請求項1記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−39056(P2011−39056A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2010−181183(P2010−181183)
【出願日】平成22年8月13日(2010.8.13)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成22年8月13日(2010.8.13)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
[ Back to top ]