
軸受締付装置
【課題】 軸保持体に軸体が2つのアンギュラ軸受によって回転可能に保持された構造の組立体において、それら軸受の締付け程度の管理を正確に行い得る装置を提供する。
【解決手段】 軸受締付装置100を、摩擦抵抗を受けない状態での変位を許容しつつ弾性的に支持されたテーブル104を備えるように構成し、そのテーブルに軸保持体12を固定し、当該締付装置が備える回転装置によって軸体14を回転させつつ、軸体と螺合する軸受締付部材を回転させる。そして、当該締付装置を、軸体と軸保持体との相対回転による抵抗を特定箇所270の変位量を測定することでその相対回転に対する抵抗を推定しつつ、軸受の締付量が適切な値となるように軸体と締付部材との相対回転を制御可能に構成する。テーブルの変位に対して摩擦力が発生しないため、正確な相対回転抵抗の推定が可能となり、その結果、軸受の締付け程度の管理を正確に行なうことができる。
【解決手段】 軸受締付装置100を、摩擦抵抗を受けない状態での変位を許容しつつ弾性的に支持されたテーブル104を備えるように構成し、そのテーブルに軸保持体12を固定し、当該締付装置が備える回転装置によって軸体14を回転させつつ、軸体と螺合する軸受締付部材を回転させる。そして、当該締付装置を、軸体と軸保持体との相対回転による抵抗を特定箇所270の変位量を測定することでその相対回転に対する抵抗を推定しつつ、軸受の締付量が適切な値となるように軸体と締付部材との相対回転を制御可能に構成する。テーブルの変位に対して摩擦力が発生しないため、正確な相対回転抵抗の推定が可能となり、その結果、軸受の締付け程度の管理を正確に行なうことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軸体が2つの転がり軸受を介して軸保持体に回転可能に保持された構造の組立体において、それら2つの転がり軸受を、軸方向に締め付けるための装置に関する。
【背景技術】
【0002】
ハウジング等に軸部材を回転可能に保持させる場合に、アンギュラ転がり軸受,スラスト転がり軸受等の軸方向力(スラスト力)を受けることが可能な転がり軸受を用いることが、一般的に行われている。それらの転がり軸受を用いる場合には、通常、それらの転がり軸受を軸方向に互いに離間させて2つ配設し、それら2つの転がり軸受を軸方向に締め付けることによって、ハウジング等に対する軸部材の軸方向における位置が固定されることになる。この軸受の締付けは、例えば、軸部材に設けられた雄ねじに螺合する雌ねじを有するナット等の締付部材を利用し、その締付部材を回転させることによって行われる。
【0003】
上記転がり軸受の締付けにおいては、その締付けの程度(締付量,締付力等)を管理することが重要となる。詳しく言えば、強く締め付ければ、転がり軸受が有する玉,ころ等の転動体への負荷が大きくなり、軸部材の回転に対する抵抗が大きくなるため、締付けの程度を適切に管理することが必要となるのである。そのため、上記転がり軸受の締付けにおいては、従来から、軸部材の回転抵抗を把握しつつ、締付け作業を行っている。具体的に言えば、回転テーブルにハウジング等を固定した状態において、ハウジング等に保持された軸部材を回転させ、上記回転抵抗に起因して発生する回転テーブルの回転力をロードセル等を用いて検出することで上記回転抵抗を把握し、その把握した回転抵抗を考慮しつつ締付け作業を行っている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述したように、上記従来の締付け作業において、軸部材の回転抵抗は、回転テーブルの回転力の検出に基づく方法によって把握される。ところが、いわゆる回転テーブルは、回転のみが可能に支持されたテーブルであり、例えば、支持機構において軸受等を必要とする。そのため、その軸受等によって支持されることに起因する回転テーブルの回転抵抗、つまり、回転テーブルの変位に対する摩擦抵抗が存在し、従来の方法では、回転テーブルの回転力を検出しても、上記転がり軸受を締め付けることによって発生する軸部材の回転抵抗を正確に把握することが困難となっている。したがって、その方法を採用する従来の締付け作業は、軸受の締付けの程度を充分に管理し得ないものとなっている。本発明は、そのような実情に鑑みてなされたものであり、軸保持体に軸体が回転可能に保持された構造の組立体においてそれら軸保持体と軸体とを連結する2つの転がり軸受を軸方向に締め付けるための軸受締付装置であって、それら2つの転がり軸受の締付け程度の管理を正確に行い得る軸受締付装置を提供することを課題とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の軸受締付装置は、(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、(A)装置本体と、(B)前記軸体と前記軸保持体との他方が固定される固定台と、(C)前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、(D)前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、(E)前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、(F)前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、(G)前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明の軸受締付装置は、軸受の締付作業の際、軸体と軸保持体とを相対回転させるべくそれらの一方を回転させるようにされており、それらの他方を固定する固定台の支持機構として、摩擦抵抗のない状態での固定台の変位を許容しつつ弾性的に支持する機構を採用し、軸体と軸保持体との相対回転に対する抵抗に起因する固定台の回転変位量を検出するようにされている。そのため、上述のように弾性的に支持された固定台の変位に基づけば、軸体と軸保持体との相対回転に対する抵抗を正確に把握することが可能となる。したがって、本発明の軸受締付装置によれば、2つの転がり軸受の締付け作業において、それら軸受の締付け程度の管理を正確に行なうことが可能となる。
【発明の態様】
【0007】
以下に、本願において特許請求が可能と認識されている発明(以下、「請求可能発明」という場合がある)の態様をいくつか例示し、それらについて説明する。各態様は請求項と同様に、項に区分し、各項に番号を付し、必要に応じて他の項の番号を引用する形式で記載する。これは、あくまでも請求可能発明の理解を容易にするためであり、それらの発明を構成する構成要素の組み合わせを、以下の各項に記載されたものに限定する趣旨ではない。つまり、請求可能発明は、各項に付随する記載,実施例の記載等を参酌して解釈されるべきであり、その解釈に従う限りにおいて、各項の態様にさらに他の構成要素を付加した態様も、また、各項の態様から構成要素を削除した態様も、請求可能発明の一態様となり得るのである。
【0008】
なお、以下の各項において、(1)項が請求項1に相当し、(4)項が請求項2に、(6)項が請求項3に、(7)項が請求項4に、(8)項が請求項5に、(11)項が請求項6に、それぞれ相当する。
【0009】
(1)(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、
装置本体と、
前記軸体と前記軸保持体との他方が固定される固定台と、
前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、
前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、
前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、
前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、
前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置と
を備えた軸受締付装置。
【0010】
本項に記載の態様の軸受締付装置は、組立体において軸体を軸保持体に回転可能に保持させるために設けられた2つの転がり軸受を、軸体と軸保持体との一方に設けられたねじに螺合する締付部材を回転させることによって、軸線方向に締め付ける作業を行うための装置であり、軸体と軸保持体との他方を固定し、軸体と軸保持体との一方を回転させることで、軸体と軸保持体との相対回転に対する抵抗を把握可能されている。詳しく言えば、本態様の軸受締付装置では、その固定台の支持機構として、摩擦抵抗のない状態での固定台の変位を許容する弾性的な支持機構を採用しており、軸体と軸保持体との一方を回転させた際、支持機構の構造に依拠して生じる固定台の変位の量を検出することで、軸体と軸保持体との相対回転抵抗を把握可能とされているのである。先に説明したように、従来の装置では、軸体と軸保持体との他方が固定された回転テーブルの回転力によって上記相対回転抵抗を把握するように構成されているため、回転テーブルの回転に対する摩擦抵抗が存在し、その摩擦抵抗が原因して、上記相対回転抵抗を正確に把握することが困難なものとなっていた。それに対し、本項の態様の軸受締付装置では、回転テーブルを採用せず、上記構造の支持機構によって支持された固定台を採用する。したがって、その固定台の上記回転変位量に基づいて、詳しく言えば、摩擦抵抗のない状態での回転変位量に基づいて、軸体と軸保持体との相対回転抵抗を把握可能であるため、その相対回転抵抗を正確に把握することが可能となる。したがって、本項の態様の軸受締付装置によれば、上記2つの軸受の締付けの程度、詳しく言えば、締付け力,締付け量等の管理が正確に行えることになるのである。なお、本明細書において、「相対回転抵抗を把握する」とは、上記相対回転抵抗を検出することのみを意味するのではなく、広く解釈し、上記回転変位量等を始め、相対回転抵抗を指標するあるいは相対回転抵抗を推定可能な何らかのパラメータを取得あるいは推定することをも意味する。
【0011】
本項の態様の軸受締付装置の作業対象となる組付体は、上記構成である限り、その具体的構成が特に限定されるものではない。例えば、「軸体」は、組立体において回転可能とされるものであればどのようなものであってもよく、例えば、何らかの装置を構成する軸部材,軸部品等が、軸体となり得る。また、単なる軸状の部材,部品等だけでなく、例えば、軸状の部分を有してその部分にギヤ,プーリ等の他の構成部分が一体的にあるいは取り付けられることによって設けられたような部材,部品等であってもよい。「軸保持体」も、軸体を回転可能に保持可能な部材,部品等であればよく、具体的には、例えば、何らかの装置を構成するハウジング,ケーシング,ベース,フレーム,躯体等が、軸保持体となり得る。
【0012】
上記組立体を構成する「転がり軸受」は、少なくとも軸線方向の荷重(スラスト荷重)を受けるものであればよく、径方向の荷重(ラジアル荷重)をも受けることが可能なものであってもよい。また、転がり軸受が有する転動体は、玉,ころ等のいずれであってもよい。上記組立体において採用可能な「転がり軸受」は、具体的には、例えば、スラスト転がり軸受、アンギュラ転がり軸受(いわゆる呼び接触角が0゜ではない転がり軸受)等であり、より詳しく言えば、スラスト転がり軸受としては、スラスト玉軸受,スラスト円すいころ軸受等を、また、アンギュラ転がり軸受としては、アンギュラ玉軸受,アンギュラ円筒ころ軸受、アンギュラ円すいころ軸受等を採用可能である。組立体は2つの転がり軸受を含んで構成されているが、それら2つの軸受がアンギュラ転がり軸受である場合には、それらの2つの軸受は、呼び接触角が0゜を挟んで一方がプラスの角度となり、他方がマイナスの角度となるようなものを組み合わせることが望ましい。換言すれば、一方の軸受と他方の軸受とが互いに反対方向のスラスト荷重を受けるようなものを組み合わせることが望ましい。
【0013】
上記組立体を構成する「軸受締付部材」は、軸体と軸保持体とのいずれと螺合する部材であってもよい。例えば、軸体に雄ねじが形成されている場合に、その雄ねじと螺合する雌ねじを有するナット的な部材であってもよく、また、例えば、軸保持体に雌ねじが形成されている場合に、その雌ねじと螺合する雄ねじを有する概してリング状の部材であってもよい。また、軸受締付部材は、「2つの転がり軸受を軸線方向に締め付ける」部材であり、例えば、互いに離間して配設された2つの転がり軸受の相互間距離が小さくなる向きの力を与える部材とすることが可能である。さらに言えば、軸体と軸保持体との一方に自身と対向して設けられた軸方向支持部との間で2つの軸受を挟持して(直接的でもよく、また、何らかの部材を介して間接的に挟持してもよい)、それら2つの軸受が接近する方向の力を2つの軸受の一方に付与するような部材とすることが可能である。軸受締付部材によって2つの軸受を軸線方向に締め付けることで、軸体と軸保持体との軸線方向における相対位置を固定することが可能となる。
【0014】
本項に記載の態様の軸受締付装置を構成する「装置本体」は、いわゆるベース、フレーム等、当該軸受締付装置の躯体として機能する部分を含んで構成されるものであればよい。「固定台」は、組立体を支持するものであり、詳しく言えば、軸体と軸保持体との他方、つまり、軸体と軸保持体とのうち上記軸受締付部材が螺合される方とは別の方のものを、固定支持するものである。固定台は、狭い意味における台状のものに限定されない。例えば、軸体と軸保持体との他方を下方から支え受けるものに限定されず、軸体と軸保持体との他方を側方から、あるいは、上方から固定支持するものであってもよいのである。また、「固定台」は、軸体と軸保持体との他方を直接固定するものに限定されない。例えば、軸体と軸保持体との他方がパレット等の保持部材に固定保持された状態において、その保持部材を固定支持することによって、軸体と軸保持体との他方を固定支持するものであってもよい。つまり、固定台は、軸体と軸保持体との他方を、何らかの部材,部品等を介して間接的に固定支持するものであってもよいのである。
【0015】
固定台を支持する「固定台支持機構」は、固定台に組立体が支持された状態において、少なくとも、固定台の上記軸体の軸線と直角な平面に沿った任意方向の変位を許容するもの、つまり、その平面に沿ったいずれの方向への変位をも許容するものとされている。また、固定台支持機構は、少なくとも、固定台の上記軸体の軸線と直角な平面に沿った任意方向の変位を許容するものであればよく、その平面と交差する方向の変位をも許容するものであってもよい。さらに、固定台支持機構は、固定台の変位を摩擦抵抗を受けない状態で許容するものであり、例えば、何らかの部品,部材等と摺接しあるいはそれらと何らかの転動体を介して係合することで変位に対する規制が存在する状態ではない状態で、固定台を支持するような構造とすればよい。さらにまた、固定台支持機構は、「弾性的に」固定台を支持するものであり、例えば、軸体と軸保持体との他方に何らかの力が作用した場合に、その力の大きさに応じた変位量変位するように固定台を支持するような構造のものとすればよい。
【0016】
本項に記載の軸受締付装置を構成する「第1回転装置」は、固定台に固定された軸体と軸保持体との他方に対して、軸体と軸保持体との一方を回転させるものであり、言い換えれば、軸体と軸保持体とを相対回転させる装置と考えることが可能である。また、「第2回転装置」は、第1回転装置によって回転可能とされている軸体と軸保持体との一方に対して、その一方に螺合する上記軸受締付部材を回転させるものであることから、本項に記載の軸受締付装置は、第1回転装置と第2回転装置とによって、軸体と軸保持体との一方と軸受締付部材とを相対回転させて、軸受の締付けを実行する装置と考えることができる。第1回転装置および第2回転装置は、具体的な構成が特に限定されるものではなく、例えば、第1回転装置は、モータ等の回転駆動源と、回転可能な状態で軸体と軸保持体との一方と係合する回転係合体と、回転駆動源と回転係合体との間に設けられた回転伝達機構(ギヤ,ベルト等を含んで構成される減速機構等)とを含んで構成されるものとすることが可能であり、また、同様に、第2回転装置は、回転駆動源と、軸受締付部材と係合する回転係合体と、回転伝達機構とを含んで構成されるものとすることが可能である。なお、第1回転装置,第2回転装置は、回転速度,回転トルク等が可変な構造のものとすることが望ましく、当該軸受締付装置は、それら第1回転装置,第2回転装置の回転速度,回転トルク等を変化させるための制御装置を備えることが望ましい。
【0017】
本項に記載の軸受締付装置を構成する「固定台変位量検出装置」は、上記固定台支持機構によって弾性的に支持された固定台の変位の量を検出する装置であり、詳しくは、固定台に組立体が支持された状態における軸体の軸線まわりの回転変位量を検出する装置である。具体的な構成が特に限定されるものではないが、固定台は固定台支持機構によって上記軸線に直角な平面内の任意の方向の変位が許容されているため、例えば、後に説明するように、固定台の特定箇所の特定方向の変位量を測定する測定器と、その測定器による測定結果に基づき演算処理等によって上記回転変位量を推定する手段(例えば、コンピュータ等)とを含んで構成することが可能である。また、例えば、固定台あるいはそれの一部分を撮像する撮像デバイスと、そのデバイスによって得られた画像に基づいて上記回転変位量を検出する手段(例えば、画像処理コンピュータ等)を含んで構成することも可能である。
【0018】
本項に記載の軸受締付装置を構成する「検出結果依拠処理実行装置」は、上記固定台変位量検出装置によって検出された固定台の上記回転変位量に基づいて、何らかの処理を実行する装置である。具体的には、例えば、軸体と軸保持体との相対回転に対する抵抗の推定、軸受締付部材による軸受の締付力の推定、第1回転装置,第2回転装置の作動の制御等、種々の処理のうちの1以上の処理を行うような装置とすることが可能である。検出結果依拠処理実行装置は、その処理内容に応じて適切な種々の態様のものとして構成することが可能であるが、例えば、コンピュータを主体とする装置とすることが可能である。
【0019】
(2)当該軸受締付装置が、前記2つの転がり軸受の各々がアンギュラ転がり軸受である前記組立体に対して、それら2つのアンギュラ転がり軸受の締め付けを実行するための装置である(1)項に記載の軸受締付装置。
【0020】
本項に記載の態様は、組立体を構成する2つの転がり軸受を、アンギュラ転がり軸受に限定した態様である。2つの転がり軸受を軸線方向に締め付ける場合、アンギュラ転がり軸受の場合は、スラスト転がり軸受の場合と比較して。その締付けの程度の差による軸体と軸保持体との相対回転抵抗の差が小さい。そのため、アンギュラ転がり軸受を含んで構成された組立体に対して締付け程度を管理する場合、より正確な相対回転抵抗の把握が必要となる。したがって、本項の態様によれば、アンギュラ転がり軸受を備えた組立体に対して、正確な締付け程度の管理が可能となる。
【0021】
(3)前記組立体が、前記2つのアンギュラ転がり軸受の各々のアウタレースの接近を禁止するアウタレース接近禁止部を前記軸保持体において備え、前記軸受締付部材が、前記軸体に設けられた雄ねじに螺合する雌ねじを有して前記軸体の一部との間で前記2つのアンギュラ転がり軸受のインナレースを挟持するナット部材である(2)項に記載の軸受締付装置。
【0022】
本項に記載の態様は、アンギュラ転がり軸を採用する組立体の構成をより具体的に限定した一態様である。上記構成の組立体においてアンギュラ転がり軸受を軸線方向に締め付ければ、軸体を軸保持体に回転可能に保持させつつ軸体と軸保持体との軸線方向における相対位置を固定することを、容易に行うことができる。
【0023】
(4)当該軸受締付装置が、
前記第1回転装置と第2回転装置とを同時期に作動させることで、前記軸体と軸保持体との一方と前記軸受締付部材とを相対回転させ、その相対回転によって前記2つ転がり軸受の締め付けを実行する構成とされた(1)項ないし(3)項のいずれかに記載の軸受締付装置。
【0024】
当該軸受締付装置では、第1回転装置による軸体と軸保持体との一方の回転を禁止する状態で、第2回転装置によって軸受締付部材を回転させて2つの軸受を締め付け、第2回転装置が軸受締付部材に対して何らの作用を及ぼさない状態で、第1回転装置によって第1回転装置によって軸体軸保持体との一方を回転させて、軸体と軸保持体との相対回転に対する抵抗を把握するような態様とすることもできる。本項に記載の態様によれば、その態様と異なり、第1回転装置と第2回転装置とを同時期に作動させて軸体と軸保持体とを相対回転して締付け作業を行うため、軸受を締め付けつつ上記相対回転に対する抵抗を把握することが可能となる。
【0025】
(5)当該軸受締付装置が、
前記第1回転装置によって前記軸体と軸保持体との一方を定速で回転させ、前記第2回転装置による前記軸受締付部材の回転速度を変化させて前記2つの転がり軸受の締付けを実行する構成とされた(4)項に記載の軸受締付装置。
【0026】
本項に記載の態様によれば、軸体と軸保持体との相対回転速度を一定に維持しつつ、軸受の締付け速度を変化させることが可能となる。したがって、軸体と軸保持体との相対回転に対する抵抗をより正確に把握しつつ、軸受の締付けの程度の調整を容易に行うことが可能となる。
【0027】
(6)前記検出結果依拠処理実行装置が、前記固定台変位量検出器による検出結果に基づいて、前記第1回転装置と前記第2回転装置との少なくとも一方の作動を制御して、前記軸体と軸保持体との一方と前記軸受締付部材との相対回転速度を制御する回転装置制御部を有する(4)項または(5)項に記載の軸受締付装置。
【0028】
本項に記載の態様は、検出結果依拠処理実行装置が、固定台の軸体の軸線まわりの回転変位量に基づく処理として、軸受の締付け速度の制御を実行する態様である。上記回転変位量に基づけば、軸体と軸保持体との相対回転に対する抵抗を把握可能であり、本項の態様によれば、その抵抗の把握下において締付け速度の制御が可能となることから、軸受の締付けを実行しつつその締付けの程度を正確に管理できることになる。本項に記載の態様には、具体的には、上記回転変位量が設定された変位量となった場合に、つまり、把握される締付けの程度が目標とする締付けの程度に近づいた場合に、軸体と軸保持体との一方と軸受締付部材との相対回転速度、すなわち、締付け速度が減少するように、第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様が含まれる。また、本項の態様においては、上記相対回転速度の制御は、その回転速度が0となるような制御も含まれ、本項の態様には、上記回転変位量が設定された変位量となった場合に、つまり、把握される締付けの程度が目標とする締付けの程度となった場合に、軸体と軸保持体との一方と軸受締付部材との相対回転速度を0とするように、すなわち、締付けの実行を停止あるいは終了するように、第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様が含まれる。なお、本項に記載の態様には、後に説明するように、上記回転変位量に基づき軸体と軸保持体との相対回転抵抗を推定し、その推定結果に基づいて第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様も含まれる。
【0029】
(7)前記検出結果依拠処理実行装置が、前記固定台変位量検出装置による検出結果に基づいて、前記軸体と前記軸保持体との相対回転に対する抵抗を推定する相対回転抵抗推定部を有する(1)項ないし(6)項のいずれかに記載の軸受締付装置。
【0030】
本項に記載の態様は、検出結果依拠処理実行装置が、固定台の軸体の軸線まわりの回転変位量に基づく処理として、軸体と軸保持体との相対回転に対する抵抗を推定する態様である。平たく言えば、本項の態様は、軸体と軸保持体との相対回転抵抗を推定することで、その相対回転抵抗を直接的に把握する態様である。本項の態様は、相対回転抵抗を推定し、その推定された相対回転抵抗に基づき、上述した締付け速度を減少させる制御,締付けを停止あるいは終了させる制御を行うような態様とすることも可能である。
【0031】
(8)前記固定台変位量検出装置が、
それぞれが、前記固定台の前記軸体の軸線と直角な平面内において互いに離間して設定された複数の箇所の各々の設定方向における変位量を測定する複数の設定箇所変位量測定器と、
それら複数の設定箇所変位量測定器の測定結果に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定する回転変位量推定部と
を含んで構成された(1)項ないし(7)項のいずれかに記載の軸受締付装置。
【0032】
先に説明したように、固定台は、固定台支持機構によって、軸体の軸線と直角な平面内における任意の方向の変位が許容されているため、つまり、いずれの方向への変位も許容されているため、固定台の特定の一箇所の変位量によって上記軸線まわりの回転変位量を検出する場合、充分に正確な回転変位量を推定することは難しい。本項に記載の態様によれば、固定台における複数箇所の各々の特定方向の変位量に基づいて上記回転変位量を推定するため、充分に正確な回転変位量の検出が可能となる。なお、複数の箇所の変位量に基づく上記回転変位量の推定は、各箇所の位置関係とその各箇所の変位方向および変位量とに基づき、幾何学的な手法に従って行うことが可能である。また、「設定箇所変位量測定器」は、適切なセンサ,変位計等を含んで構成されればよく、できれば、固定台に殆ど力を付与しない構造のセンサ,変位計等を含んで構成されることが望ましい。具体的には、例えば、ポテンショメータ,光導電素子変位計,渦電流変位センサ,差動トランス,静電容量型変位計,ホール阻止変位センサ,半導体磁気抵抗素子変位センサ,インダクトシン,マグネスケール,電気マイクロメータ,リニアエンコーダ等を含んで構成されるものを採用することが可能である。
【0033】
(9)前記固定台変位量検出装置が、
前記複数の設定箇所変位量測定器として、それぞれが、前記軸体の軸線を通る一直線上においてその軸線を挟んだ2箇所の各々の変位量であって、前記一直線と直交する方向における変位量を測定する2つの設定箇所変位量測定器を含んで構成された(8)項に記載の軸受締付装置。
【0034】
本項に記載の態様は、上記特定の2箇所の互いに同じ特定方向の変位量に基づいて、上記回転変位量を推定する態様である。本項に記載の態様によれば、少ない箇所の変位量に基づいて回転変位量を推定できるため、簡便な推定が可能となる。
【0035】
(10)前記2つの設定箇所変位量測定器が、前記軸体の軸線からの距離が互いに等しい前記2箇所の各々の変位量を測定するものとされ、
前記回転変位量推定部が、前記2つの設定箇所変位量測定器によって測定された前記2箇所の各々の変位量の和に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定するものである(9)項に記載の軸受締付装置。
【0036】
本項の態様における特定の2箇所は、上記軸線を挟んでその軸線から同じ距離離れた2箇所とされている。そのため、本項に記載の態様によれば、幾何学的に考えれば容易に判るように、より簡便に上記回転変位量を推定することが可能である。また、後に詳しく説明するように、軸体と軸保持体との相対回転抵抗に起因する固定台の変位が、上記軸線を中心とする回転変位以外に、固定台の任意の方向の移動を伴う変位を含む場合であっても、回転変位量を容易に推定することが可能である。なお、固定台が上記軸線を中心とした正確な回転変位を伴う場合、上記軸線と直交する一方向の変位量は、一方の測定箇所では+の値となり、他方の測定箇所では−の値となる。そのような場合において、本項にいう「変位量の和」とは、それらの変位量の絶対値の和を意味する。
【0037】
(11)前記固定台支持機構が、
それぞれが、一端部において前記装置本体に固定されるとともに他端部において前記固定台に固定され、弾性変形可能な複数の支持部材を含んで構成された(1)項ないし(10)項のいずれかに記載の軸受締付装置。
【0038】
本項に記載の態様のように、弾性変形可能な支持部材によって固定台を支持させれば、摩擦抵抗のない状態での固定台の変位を許容する構造が容易に実現することになる。
【0039】
(12)前記固定台支持機構が、
前記複数の支持部材として、それぞれが、前記装置本体に立設されて前記固定台を支持するとともに任意の方向に弾性的に曲げ変形可能な複数の支柱を含んで構成された(11)項に記載の軸受締付装置。
【0040】
本項に記載の態様は、固定台支持機構を、弾性変形可能な支持部材として弾性的に曲がる支柱を複数採用し、それら支柱によって支持台を支え受けるように構成した態様である。支柱状の支持部材を採用すれば、固定台およびそれに固定された組立体の重量をしっかりと支え、かつ、軸体と軸保持体との相対回転抵抗に応じた量の固定台の変位を許容することが、容易に可能となる。
【0041】
(13)前記第1回転装置および前記第2回転装置が、前記固定台と前記装置本体との間に配設された(12)項に記載の軸受締付装置。
【0042】
固定台支持機構に上記支柱を採用する場合、固定台と装置本体の間に比較的大きな空間を存在させることが可能である。本項に記載の態様は、この空間に、上記第1回転装置と第2回転装置とを配設した態様であり、本項に記載の態様によれば、固定台の上方に当該装置の構成要素が存在しないような構造の軸受締付装置を実現させることが可能となる。そのような軸受締付装置によれば、組立体の固定台への載置,固定台からの離脱等の作業性が良好となる。
【0043】
(14)当該軸受締付装置が、前記固定台の変位を禁止する固定台変位禁止機構を備えた(1)項ないし(13)項のいずれかに記載の軸受締付装置。
【0044】
固定台を弾性的に支持する固定台支持機構を採用する場合、第1回転体による軸体と軸保持体との一方の回転に起因する場合以外においても、固定台は、容易に変位する。例えば、組立体を固定台に支持させるあるいは固定台から取り外す作業等を行うような場合において、固定台に対して外部から力が加わったときにも固定台が変位してしまい、そのような作業等の作業性が悪化する可能性がある。本項に記載の態様は、そのような可能性に配慮したものであり、本項の態様によれば、例えば、任意に固定台を定置させることが可能となり、固定台への組立体の脱着等の作業の作業性を向上させることが可能となる。なお、「固定台変位禁止機構」は、それの具体的な構造が特に限定されるものではなく、例えば、任意の操作,指令等によって、固定台を装置本体に係止するような構造のものを採用することが可能である。
【0045】
(15)当該軸受締付装置が、前記固定台の変位が許容される範囲を規制する固定台変位範囲規制機構を備えた(1)項ないし(14)項のいずれかに記載の軸受締付装置。
【0046】
固定台を弾性的に支持する固定台支持機構を採用する場合、軸体と軸保持体との他方を固定台に固定して軸体と軸保持体との一方を上記第1回転装置によって回転させた場合に、軸体と軸保持体との相対回転抵抗に応じた変位量固定台が変位することになる。その場合、例えば、相対回転抵抗が大きな場合等においては、過度に固定台が変位することになる。この過度の変位は、例えば、変位量の測定精度の悪化、固定台支持機構を構成する部材の塑性変形等の種々の問題を引き起こす可能性がある。本項に記載の態様は、そのような可能性に配慮したものであり、本項の態様によれば、過度な固定台の変位が禁止され、過度な固定台の変位によって引き起こされる上記種々の問題の発生を未然に防止することが可能である。なお、「固定台変位範囲規制機構」は、それの具体的な構造が特に限定されるものではなく、例えば、固定台が設定された変位量となった場合に、固定台のそれ以上の変位を禁止するためのストッパ的な構造のものを採用することが可能である。
【実施例】
【0047】
以下、本発明の一実施例および変形例を、図を参照しつつ詳しく説明する。なお、本発明は、下記実施例の他、前記〔発明の態様〕の項に記載された態様を始めとして、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することができる。
【0048】
<軸受締付装置が対象とするワーク>
実施例の軸受締付装置が作業対象とするワークを、図1〜図3に示す。図1は正面図、図2は側面断面図であり、図3は、側面断面における分解図である。ワーク10は、軸保持体としてのハウジング12と、ハウジング12に回転可能に保持される軸体としてのかさ歯車14(「ピニオン」と呼ぶこともできる)とを含んで構成される組立体であり、車両の終減速装置の一部を構成するものである。このハウジング12の中には、デファレンシャルケースとそれの内部に配置された差動小歯車および差動大歯車からななる差動装置(図示を省略)が配設され、かさ歯車14は、当該終減速装置における入力歯車としての減速小歯車として機能し、デファレンシャルケースの外部に設けられた減速大歯車と噛合するようにされている。
【0049】
ハウジング12には、保持穴16が設けられており、ハウジング12は、その保持穴16においてかさ歯車14を保持する。かさ歯車14は、軸部18と、軸部18の図における上端部に軸部18と一体に設けられた歯車部20と、軸部18の図における下端部に軸部18と一体的に形成されて外周にセレーションが形成されたセレーション部22とを含んで構成されており、軸部18が、ハウジング12の保持穴16に、2つのアンギュラ円すいころ軸受26,28(以下、単に、「アンギュラ軸受26,28」という場合がある)を介して保持されることで、かさ歯車14が、ハウジング12に対して回転可能とされている。
【0050】
さらに詳しく説明すれば、2つのアンギュラ軸受26,28は、それぞれ、アウターレース30,32と、インナレース34,36と、リテーナ38,40によって保持されてアウタレース30,32とインナレース34,36との間に介装された転動体としての複数の円すいころ42,44とを含んで構成されており、アウタレース32,33の各々が、ハウジング12に設けられた保持穴16の構成部分である嵌合穴部46,48の各々に嵌め入れられ、インナレース34,36の各々に、かさ歯車14の軸部18における大径部50と小径部52の各々が嵌め入れられている。嵌合穴部46と嵌合穴部48との間の内径が小さくされている部分(以下、「接近禁止部54」と呼ぶことがある)は、アンギュラ軸受26,28の各々のアウタレース30,32によって挟まれ、それらアウタレース30,32の相互接近を禁止する部分とされている。
【0051】
軸部18には環状のワッシャ56が嵌められており、そのワッシャ56は、図の上方に位置するアンギュラ軸受26のインナレース34とかさ歯車14の歯車部20の下端面との間に挟まれている(ワッシャ56は、かさ歯車14の一部とみなすこともできる)。また、軸部18には、軸方向の中央部が全周にわたって径方向に突出する短い筒状のスペーサ58が嵌められており、そのスペーサ58は、アンギュラ軸受26,28の各々のインナレース34,36の間に挟まれている。さらに、軸部18の図における下部には雄ねじが形成された雄ねじ部60とされており、その雄ねじ部60に、軸受締付部材としての締付ナット62(六角ナットである)が螺合させられている。つまり、インナレース34,36は、それらの間にスペーサ58が介装される状態で、歯車部20と締付ナット62とによって挟持されているのである。
【0052】
締付ナット62を回転させて2つのアンギュラ軸受26,28を締め付けることにより、インナレース34,36は相互に接近する方向の力を受ける状態となり、その状態において、かさ歯車14のハウジング12に対する軸方向の位置が固定されることになる。ちなみに、スペーサ58は、2つのアンギュラ軸受26,28が締め付けられた状態において、軸方向の寸法が縮むように塑性変形させられるが、スプリングバックにより、インナレース34,36が相互に離間する方向の力を発生させ、締付ナット62の緩みを効果的に防止している。
【0053】
先に説明したように、2つのアンギュラ軸受26,28を締め付けることにより、インナレース34,36は相互に接近する方向の力を受ける。一方、2つのアンギュラ軸受26,28のアウタレース30,32は、軸保持穴16に設けられた接近禁止部54によって、相互に接近することが禁止されている。そのため、2つのアンギュラ軸受の26,28の各々の円すいころ42,44の各々に、負荷がかかることになる。円すいころ42,44の各々は、アウタレース30,32の各々とインナレース34,36の各々とにアンギュラコンタクトしているため(呼び接触角が0゜ではないため)、その負荷は、アウタレース30,32の各々とインナレース34,36の各々との相対回転に対する抵抗、すなわち、かさ歯車14のハウジング12に対する回転抵抗となる。上記負荷は、2つのアンギュラ軸受26,28の締付けの程度によって変化し、きつく締め付けるほど、つまり、締付け量が大きいほど、大きくなり、締付けの程度が大きくなるにつれて、かさ歯車14の回転抵抗は大きくなる。したがって、2つのアンギュラ軸受26,28の締付けの程度を管理することは重要であり、以下に説明する本実施例の軸受締付装置では、その締付けの程度を把握しつつ、締付け作業を行うようにされている。
【0054】
<軸受締付装置の構成>
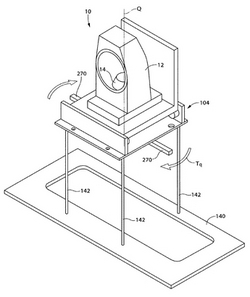
実施例の軸受締付装置の全体斜視図を図4に示し、分解斜視図を図5に示す。軸受締付装置100は、装置本体を構成する装置フレーム102と、前述したワーク10が固定されるテーブル104を備えたテーブルユニット106と、ワーク10が固定された状態において前述のかさ歯車14,締付ナット62の各々を回転させるかさ歯車回転装置108,締付ナット回転装置110を備えた回転装置ユニット112と、装置フレーム102上に固定されて本軸受締付装置100の制御を司る制御装置を内蔵する制御盤114とを含んで構成されている。なお、以下の説明では、図4,図5における斜め左下方を装置の手前側(前方)と、斜め右上方を装置の奥側(後方)と称し、斜め左上方を装置の左側(左方)と、斜め右下方を装置の右側(右方)と称することとする。
【0055】
装置フレーム102は、ベースフレーム120と、ベースフレーム120の前後における中央部に立設された立設支持板122と、立設支持板122の手前側を囲うように設けられたアングルフレーム124とを含んで構成されている。図6に示すように、立設支持板122には、上下方向に延びる1対のガイドレール126が固定して設けられており、それら1対のガイドレール126の各々に対して、2つのスライドブロック128が摺動可能に配設されている。また、立設支持板122には、昇降シリンダ130が固定して設けられている。後に詳しく説明するが、回転装置ユニット112は、スライドブロック128に取り付けられ、油圧駆動される昇降シリンダ130によって昇降させられる。
【0056】
テーブルユニット106は、図7に示すように、ワーク10が固定される固定台としてのテーブル104と、装置フレーム102を構成するベースフレーム120に固定されるベース板140と、それぞれがベース板140に立設されてテーブル104を支持する4つの支柱ロッド142とを含んで構成されている。各支持ロッド142は、テーブル104を支持する支持部材として、詳しくは支柱として、機能するものとされており、下端部が、ベース板140を介して装置フレーム102に固定され、上端部が、テーブル104の下面に固定されている。また、各支持ロッド142は、比較的細いものされており、テーブル104およびそれに載置されるワーク10の重量を充分に支えることができるが、テーブル104を前後左右方向に移動させる力に対しては、容易に、弾性変形可能、詳しくは、任意の方向に弾性的に曲げ変形可能とされている。本軸受締付装置100においては、それら支持ロッド142を含んで、固定台であるテーブル104を支持する固定台支持機構が構成されているのである。
【0057】
図8に示すように、ワーク10は、パレット144に固定され、図9に示すように、パレット144に固定された状態で、テーブル104に固定される。パレット144は、底板部146と背板部148とを有する断面が概してL字形状をなしており、ワーク10は、底板部146に載せ置かれ、ハウジング12の底部が、図示を省略する固定具によって固定される。底板部146には、図では省略するが、開口が設けられており、ワーク10が備えるかさ歯車14の下端部であるセレーション部22が、その開口から下方に臨み出るようにされている。
【0058】
テーブル104は、台板150と、台板150の前後に立設されてそれぞれの向かい合う面に4つのローラ152が取り付けられたた1対の立設板154,156とを含んで構成されており、パレット144に固定されたワーク10は、パレット144がそれらローラ152の上に乗る状態で移動させられて、当該軸受締付装置100の右方から搬入される。図では省略するが、テーブル104には、係止解除可能なストッパが設けられており、係止可能状態とされたストッパにパレット144が係止されることで、搬入されたワーク10の左右方向における位置決めがなされる。左右方向における位置決めがなされた状態において、パレット144の底板部146の前端と前方側の立設板154との間に、図示を省略する楔状の固定具が挿し込まれることによって、パレット144の後方端が立設板156に押付けられる状態となり、ワーク10の前後方向の位置決めがなされるとともに、パレット144がテーブル104にしっかりと固定される。ワーク10のテーブル104への載置は、そのようにして行われる。
【0059】
なお、図6に示すように、アングルフレーム124には、1対のブラケット160の各々によって支持される状態で、1対の固定ピン162を備えてそれら固定ピン162の各々を上下方向に進退させる1対の固定ピン進退シリンダ164(圧縮空気で駆動される)が設けられている。固定ピン162の各々は、シリンダ164の各々によって上方に進出させられた状態において、テーブル104の台板150の前端部に設けられた2つのピン穴168の各々に嵌め入れられるようにされている。固定ピン162とピン穴168とは殆どクリアランスを有しておらず、2つの固定ピン162の各々が2つのピン穴168の各々に嵌め入れられた状態において、テーブル104は、前後左右の変位が禁止される状態となる。上記ワーク10の搬入作業およびパレット144の固定作業を行う際には、各固定ピン162が各シリンダ164によって進出させられることで各ピン穴168に嵌め入れられ、テーブル104の変位が禁止された状態で、それらの作業を行なうことが可能となっている。つまり、固定ピン162,固定ピン進出シリンダ164,ピン穴168等を含んで、固定台としてのテーブル104の変位を禁止する固定台変位禁止機構が構成されており、本軸受締付装置100では、その機構によって、上記搬入作業,固定作業の容易化が図られることになる。
【0060】
上述のように位置決め固定されたワーク10は、図9に示す状態となり、その状態において、ワーク10が備えるかさ歯車14の軸線が、テーブル104の台板150と直交し、台板150に設けられた円形の開口170の中心線と一致するように、軸受締付装置100に対して定置された状態となる。その定置された状態において、回転装置ユニット112は、その開口170を利用してワーク10と係合し、後に説明するように、かさ歯車14および締付ナット62が回転させられる。
【0061】
図10および断面を図11に示す回転装置ユニット112は、基体180と、その基体180に支持されたかさ歯車回転装置108および締付ナット回転装置110とを含んで構成されている。見方を変えて言えば、回転装置ユニット112は、基体180と、その基体180に支持された第1モータ182および第2モータ184と、基体180に支持されてそれら第1モータ182および第2モータ184によって駆動させられる駆動機構部186とを含んで構成されている。基体180は、背面板部190と、背面板部190に固着された概してL字状をなす第1支持板部192と、背面板部190と一体的に形成された第2支持板部194とを含んで構成されており、第1支持板部192において、第1モータ182が基体180に固定支持され、第2支持板部194において、第2モータ184および駆動機構部186とが基体180に固定支持されている。
【0062】
駆動機構部186は、第2支持板部192に保持環200を介して固定された第1保持筒202と、第2支持板部192に固定された第2保持筒204とを有している。第1保持筒202と第2保持筒204とは、それぞれが自身のフランジ部206,208において第2支持板部192に固定されており、第1保持筒202の筒部210の上部が第2保持筒204の筒部212に収容される状態で、互いに同軸的に配置されている。第1保持筒202の筒部210の内部には、軸受214を介して第1回転筒216が回転可能かつ軸方向に移動不能に保持され、また、第2保持筒204の筒部212の内部には、軸受218を介して第2回転筒220が回転可能かつ軸方向に移動不能に保持されている。ちなみに、第2回転筒220は、第1保持筒202の筒部210の上部を収容するように配置されている。
【0063】
第1回転筒216の内部には、係合ロッド222が挿通させられている。この係合ロッド222は、後に説明するように、上端部においてワーク10が備えるかさ歯車14のセレーション部22と係合するものであり、第1回転筒216とスプライン嵌合させられており、第1回転筒216に対して回転不能かつ軸方向に移動可能とされている。また、第2回転筒220の上部の内部には、係合筒224が挿通させられている。この係合筒224は、後に説明するように、上端部においてワーク10が備える締付ナット62に係合するものであり、第2回転筒220とスプライン嵌合させられており、第2回転筒220に対して回転不能かつ軸方向に移動可能とされている。ちなみに、係合ロッド222は、それの上部が係合筒224の内部に収容された状態で配置されている。
【0064】
係合ロッド222の上端部付近の外周部には、環状に突出する支持突部226が設けられており、この支持突部226と第1回転筒216の上端面とに両端の各々が支持されるともに係合ロッド222に外嵌する状態で、圧縮コイルスプリング228が配設されている。係合ロッド222の下端部には係止環230が固定されており、係合ロッド222は、その係止環230によって上方への移動が制限されるとともに、スプリング228によって上方に付勢された状態とされている。そのような構成によって、スプリング228の付勢力を超える力が作用した場合において、係合ロッド222の下方への移動が許容されているのである。
【0065】
係合筒224はフランジ部232を有しており、このフランジ部232には、一円周における等配位置に4つのポルト穴が穿設さている。それらボルト穴に緩やかに嵌入する状態で、4つのボルト234が、第2回転筒220が有するフランジ部236の内周側基部に螺合によって立設されている(図では、1つのボルト234のみが示されている)。係合筒224のフランジ部232と第2回転筒220のフランジ部236との間には、それぞれが4つのボルト234の各々に外嵌する状態で、4つの圧縮コイルスプリング238が配設されている。係合筒224は、ボルト234の頭部によって上方への移動が制限されるとともに、スプリング238によって上方に付勢された状態とされている。このような構成によって、スプリング238の付勢力を超える力が作用した場合において、係合筒224の下方への移動が許容されているのである。なお、係合筒224のフランジ部232と第2回転筒220のフランジ部236とのそれぞれには、互いに嵌め合わされた薄肉の円筒部材240,242が固定されており、それら円筒部材240,242は、係合筒224の上下動を許容しつつ駆動機構部186の防塵を担保する防塵カバーとして機能するものとされている。
【0066】
第1回転筒216の下部には、ギヤ244が、第1回転筒216と相対回転不能に嵌められており、このギヤ244は、第1モータ182のモータ軸にそれと相対回転不能に嵌められたギヤ246と噛合させられている。また、第2回転筒220が有するフランジ部236の外周には歯が形成されており、このフランジ部236はギヤとして機能するものとなっており、フランジ部236の外周部は、第2モータ184のモータ軸にそれと相対回転不能に嵌められたギヤ248が噛合させられている。そのような構造により、第1モータ182,第2モータ184の各々を回転させることにより、係合ロッド222,係合筒4の各々を独立して回転させることが可能とされているのである。なお、第1モータ182,第2モータ184は、ともに、減速機付きのサーボモータであって、回転速度を制御可能とされており、係合ロッド222,係合筒224の回転速度は独立して制御可能となっている。
【0067】
係合ロッド222の上端部には、軸方向に凹む凹所が設けられており、その凹所の内部には、ワーク10が備えるかさ歯車14のセレーション部22と係合するセレーション250が設けられている。また、係合筒224の上端部は、いわゆるボックスレンチとして機能するものとなっており、ワーク10が備える締付ナット62と係合する概して六角の係合穴252が設けられている。先に説明したようにワーク10のハウジング12をテーブル104に固定し、係合ロッド222とかさ歯車14のセレーション部22とが係合する状態において第1モータ182を回転させれば、かさ歯車14を回転させることができ、係合筒224と締付ナット62とが係合する状態において第2モータ184を回転させれば、締付ナット62を回転させることができる。詳しく言えば、第1モータ182と第2モータ184との相対回転速度を制御することで、締付ナット62とかさ歯車14との相対回転を生じさせて、ワーク10が備える2つのアンギュラ軸受26,28を締め付けることができるのである。
【0068】
以上のような構造から、本回転装置ユニット112においては、第1モータ182,第1保持筒202,第1回転筒216,係合ロッド222,ギヤ224,ギヤ226等を含んで、第1回転装置であるかさ歯車回転装置108が構成され、第2モータ184,第2保持筒204,第2回転筒220,係合筒224,ギヤ248等を含んで、第2回転装置である締付ナット回転装置110が構成されているのである。
【0069】
先に説明したように、本軸受締付装置100においては、回転装置ユニット112は、装置フレーム102の立設支持板122に設けられた2つのガイドレール126に沿って移動可能な4つのスライドブロック128に取り付けられている。詳しく言えば、回転装置ユニット112を構成する基体180の背面板部190の後方の面において、スライドブロック128に取り付けられている。先に説明した昇降シリンダ130は、それのシリンダロッド上端部が背面板部190の下端の左右方向における中央部を下から支え受けるようにされており、昇降シリンダ130を作動させることで、回転装置ユニット112が昇降させられる構造となっている。先に説明したようにワーク10の搬入およびテーブル104への固定の際には、回転装置ユニット112は下降位置に位置させられており、ワーク10のテーブル104への固定後に、昇降シリンダ130の作動によって、回転装置ユニット112が上昇位置に位置させられ、その状態において、アンギュラ軸受26,28の締付け作業が行われる。なお、回転装置ユニット112が、上昇させられる際、係合ロッド222の回転角度とかさ歯車14との回転角度との不整合によって係合ロッド222に設けられたセレーション250とかさ歯車14のセレーション部22とが嵌合しない場合には、圧縮コイルスプリング228の付勢力に抗して係合ロッド222が押し下げられることになるが、かさ歯車回転装置108によって係合ロッド222が回転させられた際に、係合ロッド222の回転角度とかさ歯車14の回転角度とが整合し、スプリング228の付勢力によって係合ロッド222が押し上げられてセレーション250とセレーション部22とが嵌合する状態となる。また、同様に、係合筒224の回転角度と締付ナット62の回転角度との不整合によって係合筒224に設けられた係合穴252と締付ナット62の外側部とが嵌合しない場合には、圧縮コイルスプリング238の付勢力に抗して係合筒224が押し下げられることになるが、締付ナット回転装置110によって係合筒224が回転させられた際に、係合筒224の回転角度と締付ナット62の回転角度とが整合し、スプリング238の付勢力によって係合筒224が押し上げられて係合穴252と締付ナット62の外側部とが嵌合する状態となる。アンギュラ軸受26,28の締付け作業の終了後、回転装置ユニット112は、昇降シリンダ130の作動によって下降位置に位置させられた状態とされ、その状態において、ワーク10は、テーブル104への固定が解除されて搬出される。
【0070】
以上が、本軸受締付装置100の構成の説明であるが、本軸受締付装置100の構成上の特徴として、回転装置ユニット112が、詳しく言えば、かさ歯車回転装置108と締付ナット回転装置110との両者が、テーブル104と装置フレーム102との間(厳密には、テーブル104とベースフレーム120との間)に配設されていることを挙げることができる。この特徴は、テーブル104が、それぞれが支柱として機能する4つの支持ロッド142によって支持されていることによって実現されたものである。詳しく言えば、手前側の2つの支持ロッド142と奥側の2つの支持ロッド142との間の空間に存在することによって実現されている(奥側の2つの支柱ロッド142の各々は、回転装置ユニット112の基体に設けられた2つの開口260の各々(図10参照、図では一方のみが示されている)を貫通している)。このように、回転装置ユニット112がテーブル104の下方に存在することにより、本軸受締付装置100では、テーブル104の上方の空間には、当該装置の構成要素が存在しないような構造となっている。そのため、ワーク10の搬入,テーブル104の載置,搬出といった作業の作業性が良好なものとなっている。
【0071】
<アンギュラ軸受の締付程度の管理>
先に説明したように、ワーク10が有するアンギュラ軸受26,28を締付ナット62によって締め付ける場合、締付け程度によって、かさ歯車14の回転抵抗が変化する。軸受締付装置100では、その締付け程度を管理するようにされている。
【0072】
ワーク10は、ハウジング12がパレット144を介してテーブル104に固定されることで、テーブル104に載置される。この状態で、かさ歯車回転装置108を作動させてかさ歯車14を回転させれば、図12に示すように、かさ歯車14のハウジング12に対する回転抵抗に応じた大きさ力、つまり、かさ歯車14の軸線である軸線Q回りの回転トルクTqが、テーブル104に作用することになる。本軸受締付装置100では、上述したように、テーブル104は、4つの支持ロッド142によって装置フレーム102に弾性的に支持されており、上記回転抵抗に依拠する力によって、それら4つの支持ロッド142の曲げ変形(撓み)テーブル104が変位させられることになる。なお、後に詳しく説明するが、本軸受締付装置100では、かさ歯車14はかさ歯車回転装置108によって、上方からみて時計まわりに回転させられるため、その方向にテーブルが回転変位することになる。
【0073】
上記テーブル104の変位は、図13に誇張して示すように、概して、上記軸線Qの回りの回転変位として現れることになる。本軸受締付装置10では、この回転変位を測定するために、テーブル104に1対の被測定バー270が設けられるとともに、それら被測定バー270の各々において設定された設定箇所PR,PLの変位量を測定するための設定箇所変位量測定器としての1対の差動トランス272が設けられている。詳しく言えば、被測定バー270の各々は、テーブル104の台板150の下面に、台板150から左右の各々に延び出すように付設されている(図7参照)。設定箇所PR,PLが存在する被測定バー270の各々の奥側の面は軸線Qを含む一面上に位置しており、設定箇所PR,PLは、軸線Qと直交する一直線上に位置するとともに、軸線Qからの距離が互いに等しい位置に位置している。一方、差動トランス272の各々は、装置フレーム102を構成する立設支持板122に付設された1対のブラケット274の各々に、上記一直線に直交する方向に延びる向きに配設されている(図6参照)。差動トランス272の各々の測定子の先端は、設定箇所PR,PLにおいて被測定バー270の各々と当接するようにされており、差動トランス272の各々は、被測定バー270の変位に応じて伸縮し、設定箇所PR,PLの各々の前後方向の変位量、詳しくは、上記軸線Qに直交する面内における前後方向の変位量δR,δLを測定可能とされている。
【0074】
テーブル104の変位は、厳密に言えば、テーブル104に対するワーク10の定置誤差、各支柱ロッド142のテーブル104に対する取付位置誤差、各支柱ロッド142の剛性についての誤差等により、回転変位だけなく、軸線Qに直角な平面内において回転中心が移動するような変位も生じる(図では、軸線Qが軸線Q’に移動するうような変位、つまり、左右方向の変位成分がΔXと、前後方向の変位成分をΔYとなるような変位として表されている)。したがって、そのような変位を除外した回転変位量を測定することによって、テーブル104が受ける回転トルクTqを正確に把握することが可能となる。そのことに考慮して、本軸受締付装置100では、テーブル104の回転変位量を、上記設定箇所PR,PLの各々の前後方向の変位量δR,δLの和である変位量和ΣΔ(=δR+δL)に基づいて推定するようにされている(設定箇所PRの変位量δRは、装置手前側に変位する場合を+とし、逆に、設定箇所PLの変位量δLは、装置奥側に変位する場合を+とする)。変位量和Σδは、差動トランス272の測定子の先端と被測定バー270との左右方向の相対移動が許容されているため左右方向の変位成分ΔXの影響が殆ど除外された値となり、また、前後方向の変位成分ΔYの影響が殆ど相殺された値となる。したがって、変位量和Σδは、テーブル104の軸線Qまわりの回転変位量を正確に推定可能なパラメータであり、言い換えれば、その回転変位量に相当するものとなっており、変位量和Σδに基づけば、テーブル104に作用する回転トルクTqを正確に推定することが可能となるのである。
【0075】
図14に、上記変位量和Σδとテーブル104に作用する回転トルクTqとの関係を示す。この関係は、図15に示すように、所定の錐体280を用いてテーブル104に回転トルクTqを作用させ、その状態において差動トランス272によって測定された設定箇所PR,PLの変位量δR,δLを求め、錐体280の重さを種々に変えて測定を繰り返し、その結果として作成された関係である。ちなみに、本軸受締付装置100では、テーブル104の台板150の上面には、軸線Qを等間隔に挟む位置に1対の掛止ピン282が設けられており(図7参照)、装置フレーム102に脱着可能に取り付けられた1対のローラ284にストリングを巻き掛けるようにして1対の錐体280の各々を掛止ピン282の各々に掛止させることで、テーブル104に回転トルクTqを付与するようにされている。
【0076】
図14から解るように、テーブル104に作用する回転トルクTqは、変位量和Σδに比例するものとなっている。また、図示は省略するが、テーブル104にワーク10のハウジング12を固定した状態でかさ歯車14を回転させたときにテーブル14に作用する回転トルクTqは、ハウジング12に対するかさ歯車14の回転抵抗に比例するものとなることから、その回転抵抗は、かさ歯車14とハウジング12との相対回転速度が一定の場合における変位量和Σδに比例するものとなる。図14には、相対回転速度が一定の場合における変位量和Σδに対するかさ歯車14とハウジング12との相対回転抵抗Rとの関係も併せて示されている。一方、上述したように、2つのアンギュラ軸受26,28の締付け程度によって変わり、また、本軸受締付装置100では、後に説明するように、この変位量和Σδと相対回転抵抗Rとの関係データが、制御盤114内に配設されたコンピュータに記憶されおり、本軸受締付装置100では、上記記憶されている関係データを参照しつつ、上記変位量和Σδに基づいて、すなわち、上記軸線Qまわりのテーブル104の回転変位量に基づいて、それらアンギュラ軸受26,28の締付け程度の管理がなされるようにされているのである。
【0077】
なお、先に説明した錐体280を利用した回転トルクの付与は、本軸受締付装置100の検定に利用できる。つまり、錐体280の重量と変位量和Σδとの正規の関係をデータとして作成しておけば、始業時,定期点検等の際に、所定重さの錐体280を用いてテーブル104に回転トルクを付与し、そのときの変位量和Σδが、設定された範囲内の値となる場合に、当該軸受締付装置100が正当にアンギュラ軸受26,28の締付け程度の管理が可能であると判断することができる。
【0078】
先に説明したように、回転トルクが作用する場合に、テーブル104は変位する。過度の締付け等、予定していない大きさの回転トルクが作用する場合には、テーブル104の変位量が過度に大きくなり、テーブル104を支える支柱142の過度の変形等、当該軸受締付装置100に不具合が生じる場合がある。したがって、そのような過度のテーブル104の変位を防止することが望ましい。そこで、本軸受締付装置100では、固定台変位範囲規制機構としてのテーブル変位範囲規制機構を備え、それによってテーブル104の変位が許容される範囲が規制されている。詳しく言えば、装置フレーム102を構成する立設支持板122に付設された1対のブラケット274の各々には、1対の規制ピン286の各々が立設されており(図6参照)、この1対の規制ピン286の各々が、テーブル104の台板150に設けられた1対のピン挿通穴288(図7参照)の各々に挿通するような構造とされている。各規制ピン286の外径は各ピン挿通穴288の径より適当に小さくされており、ある範囲内でのテーブル104の変位は許容するものの、過度の変位が生じた場合には、少なくとも一方の規制ピン286が、少なくとも一方のピン挿通穴288の周壁面に当接し、それ以上の変位が防止される構造とされているのである。本軸受締付装置100においては、このような構造によって、テーブル変位範囲規制機構が構成されているのである。
【0079】
<制御装置の概要>
本軸受締付装置100の作動は、制御盤114に収容された制御装置によって制御される。制御装置は、コンピュータを主体とするものであり、図16に示すような機能構成をなしている。制御装置300は、第1回転装置であるかさ歯車回転装置108、詳しくは、それが備える第1モータ182の作動を制御するかさ歯車回転装置制御部302を有し、また、第2回転装置であるナット回転装置110、詳しくは、それが備える第2モータ184を制御するナット回転装置制御部304を有しており、それら、かさ歯車装置制御部302およびナット回転装置制御部304とを含んで回転装置制御部306が構成されている。これらかさ歯車回転装置制御部302,ナット回転装置制御部304は、制御盤114内に収容されたそれぞれの駆動回路308,310(インバータである)を介して、かさ歯車回転装置108,ナット回転装置110に接続されている。
【0080】
また、制御装置300は、昇降シリンダ130の作動を制御する昇降シリンダ制御部312を有し、その昇降シリンダ制御部308は、制御盤114内に収容された駆動ユニット(油圧ユニットである)314を介して、昇降シリンダ130に接続されている。さらに、制御装置300は、1対の固定ピン進退シリンダ164の作動を制御する固定ピン進退シリンダ制御部316を有し、その固定ピン進退シリンダ制御部316は、制御盤114内に収容された駆動ユニット318(空気圧弁等を含む構造のもの)を介して、1対の固定ピン進退シリンダ164に接続されている。
【0081】
また、制御装置300は、相対回転抵抗推定部320を有している。相対回転抵抗推定部320は、先に説明したように、それに接続された1対の差動トランス272の各々からの変位量δR,δLについての測定信号に基づいて、変位量和Σδ、すなわち、テーブル104の回転変位量を推定する機能部として、回転変位量推定部321を有しており、その回転変位量推定部321によって推定された変位量和Σδに基づいて、関係データ格納部322に格納されている変位量和−相対回転抵抗関係データを参照しつつ、ワーク10におけるかさ歯車14とハウジング12との相対回転抵抗Rを推定する。また、相対回転抵抗推定部316は、推定された相対回転抵抗Rが、設定されて関係データ格納部316に格納された相対回転抵抗閾値RSを超えているか否かの判断をも行う。
【0082】
なお、固定ピン進退シリンダ制御部316には、起動スイッチ324(図示を省略する)が接続されており、固定ピン進退シリンダ制御部316は、起動スイッチ324のON信号に基づいて、固定ピン進退シリンダ164による固定ピン162の退避動作を開始させる。また、固定ピン進退シリンダ制御部316,昇降シリンダ制御部312,回転装置制御部306は、互いに信号のやり取りを行うようにされており、それらの各々は、それらの他の機能部からの信号に基づいて、かさ歯車回転装置308,ナット回転装置310の動作の開始、昇降シリンダ130による回転装置ユニット112の上昇,下降動作の開始、固定ピン進退シリンダ164による固定ピン162の進出動作の開始等を実行する。
【0083】
<軸受締付装置の作動>
先に説明したように、ワーク10が搬入されてテーブル104に固定された後に、軸受締付装置100が作動させられる。軸受締付装置100は、図17にフローチャートで示す軸受締付装置制御プログラムが、制御装置300の主体をなすコンピュータによって実行されることによって作動が制御される。以下、そのフローチャートに沿って、本軸受締付装置100の作動について説明する。
【0084】
本軸受締付装置制御プログラムは、起動スイッチ324が操作されることによって、実行が開始される。まずステップ1(以下、「S1」と略す、他のステップも同様)において、固定ピン退避シリンダ164が作動させられて、固定ピン162が退避させられる。それによって、1対の固定ピン162は、テーブル104の台板150に設けられた1対のピン穴168から抜き出され、テーブル104の固定の解除、つまり、変位が許容される。続くS2において、昇降シリンダ130が作動させられて、回転装置ユニット112が、設定された上昇位置、つまり、かさ歯車回転装置108の係合ロッド222とかさ歯車14のセレーション部22とが係合し、ナット回転装置110の係合筒224とが係合して、締付ナット62によるアンギュラ軸受26,28の締付け作業が実行可能な位置まで上昇させられる。
【0085】
回転装置ユニット112の上昇後、S3において、かさ歯車回転装置108およびナット回転装置110の作動が開始されて、かさ歯車14および締付ナット62の回転が開始させられる。このときのかさ歯車14の回転方向と締付ナット62の回転方向とは、互いに同方向とされ、その方向は、かさ歯車14が回転しないと仮定した場合に締付ナット62が緩められる方向(上方からみて時計回りの方向)とされている。また、かさ歯車14の回転速度V1は、かさ歯車14とハウジング12との相対回転抵抗を把握するのに適切な一定の回転速度である基準回転速度Vn(例えば、60rpm程度)とされ、それに対して、締付ナット62の回転速度V2は、かさ歯車回転速度V1より第1回転速度差ΔVA(例えば、5〜10rpm程度)だけ小さい速度(Vn−ΔVA)とされている。したがって、締付ナット62とかさ歯車14とは締付ナット62が締め付けられる方向に相対回転し、締付ナット62は、かさ歯車14に対してΔVAの速度で締め付けられることになる。
【0086】
次のS4において、かさ歯車14とハウジング12との相対回転抵抗Rが推定される。この推定は、先に説明したように、差動トランス272によって測定されたテーブル104の2つの設定箇所PR,PLの変位量δR,δLに基づいて行われる。具体的に言えば、それら変位量δR,δLの和である変位量和Σδが演算によって求められ、その求められた変位量和Σδをもってしてテーブル104の軸線Qまわりの回転変位量と推定するとともに、変位量和Σδに相当する相対回転抵抗Rの値が、関係データ格納部322に格納されている変位量和−相対回転抵抗関係データから読み出されることによって、相対回転抵抗Rの推定が行われる。つまり、このS4においては、テーブル104の回転変位量に基づいて、相対回転抵抗Rが推定されることになる。続いて、S5において、推定された相対回転抵抗Rが、設定された第1相対回転抵抗閾値RS1以上であるか否かが判定される。この第1相対回転抵抗閾値RS1は、管理目標とされた締付け程度において有すべき相対回転抵抗値(後に説明する第2相対回転抵抗閾値RS2である)にある程度近づいたと判断できる値に設定されている(図14参照)。S4の推定処理,S5の判定処理は、相対回転抵抗Rが第1相対回転抵抗閾値RS1に達するまで、極短い時間間隔(例えば、数msec)で繰り返し実行される。S5において相対回転抵抗Rが第1相対回転抵抗閾値RS1に達したと判定された場合には、次のS6が実行される。
【0087】
S6では、締付ナット62に回転速度である締付ナット回転速度V2が増加させられる。具体的には、上記第1回転速度差ΔVAより小さい値に設定されている第2回転速度差ΔVB(例えば、1〜2rpm程度)に基づいて、締付ナット回転速度V2が、回転速度(Vn−ΔVB)に増加させられる。これによって、締付ナット62とかさ歯車14の相対回転速度が減少させられ、締付ナット62は、それまでより遅い速度であるΔVBの速度で締付けられることになる。この締付け速度の減少は、過度の締付けを防止するとともに、締付け程度を正確に管理するために行われる。
【0088】
続くS7において、締付け速度が減少させられている状態において、先のS4と同様の処理によって、かさ歯車14とハウジング12との相対回転抵抗Rが推定され、S8において、先のS5の処理と同様の処理によって、相対回転抵抗Rが、管理目標として設定された第2相対回転抵抗閾値RS2以上であるか否かが判定される。これら、S7およびS8の処理は、S4,S5と同様に、相対回転抵抗Rが第2相対回転抵抗閾値RS2に達するまで、極短い時間間隔で繰り返し実行される。S8において相対回転抵抗Rが第2相対回転抵抗閾値RS2に達したと判定された場合には、次のS9において、かさ歯車回転装置108およびナット回転装置110の作動が停止させられる。それにより、かさ歯車14および締付ナット62の両者の回転が停止させられ、つまり、かさ歯車14とハウジング12との相対回転速度が0とされ、締付ナット62によるアンギュラ軸受26,28の締付けが、目標となる締付け程度となる状態で完了する。
【0089】
締付けが完了した後、次のS10において、昇降シリンダ130が作動させられて、回転装置ユニット112が、初期位置にまで下降させられ、さらに、続くS11において、固定ピン退避シリンダ164が作動させられて、固定ピン162が進出させられ、それによって、1対の固定ピン162は、テーブル104の台板150に設けられた1対のピン穴168に嵌入されて、テーブル104が変位を禁止する状態に固定される。以上説明したような一連の処理が実行されて、1つのワーク10に対する締付け作業が完了する。締付け作業が完了したワーク10は、テーブル104に対する固定が解除されて、パレット144ごと本軸受締付装置100から搬出される。
【0090】
上記締付け作業における各ステップの処理と前述の制御装置300の各機能部との関係について言及すれば、制御装置300は、S1およびS11の処理を実行する部分を含んで固定ピン進退シリンダ制御部316が、S2およびS10の処理を実行する部分を含んで昇降シリンダ制御部312が、S3およびS9におけるかさ歯車回転装置108の動作に関する処理を実行する部分を含んでかさ歯車回転装置制御部302が、S3およびS9におけるナット回転装置110の動作に関する処理を実行する部分並びにS6の処理を実行する部分を含んでナット回転装置制御部304が、S4,S5,S7およびS8の処理を実行する部分を含んで相対回転抵抗推定部320が、それぞれ構成されたものとなっている。
【0091】
また、本軸受締付装置100では、上記S4およびS7において、差動トランス272による測定結果に基づいて、変位量和Σδが求められる。先に説明したように、この変位量和Σδを求めて、テーブル104の回転変位量を推定する処理を行う部分が、回転変位量推定部321を構成するものとされており、本軸受締付装置100においては、差動トランス272と、その回転変位量推定部321とを含んで、固定台変位量検出装置が構成されることになる。さらに、S4およびS7において上記相対回転抵抗Rを推定する処理は、その固定台変位量検出装置の検出結果に基づく推定処理であり、また、S6およびS9における回転装置制御部306による処理、つまり、かさ歯車回転装置108とナット回転装置110との少なくとも一方を制御することでかさ歯車14とハウジング12との相対回転速度を制御する処理も、固定台変位量検出装置の検出結果に基づく推定処理となっている。したがって、制御装置300は、検出結果依拠処理実行装置として機能するものとなっているのである。
【0092】
なお、本軸受締付装置100では、先に説明したように、かさ歯車14および締付ナット62の回転方向は、かさ歯車14が回転しないと仮定した場合に締付ナット62が緩められる方向とされているが、逆回転方向(上方からみて反時計回りの方向)に回転させることによって締付けを実行することも可能である。その場合は、例えば、かさ歯車回転速度V1を基準回転速度Vnとし、締付ナット回転速度V2を、基準回転速度Vnより第1回転速度差ΔVAあるいは第2回転速度差ΔVBだけ大きな速度で回転させるようにすればよい。ちなみに、その場合は、テーブル104も逆方向に回転変位させられることななるため、変位量δR,δLおよび変位量和Σδの符号の扱いも逆になる。また、かさ歯車14とハウジング12との相対回転速度を変更は、ナット回転装置110の作動を制御することによって行うのではなく、かさ歯車回転装置108の作動を制御することによっておこなってもよい。
【0093】
<変形例>
以下に、変形例としての軸受締付装置を、それの作業対象となるワークを説明した上で、簡単に説明する。
【0094】
変形例の軸受締付装置の作業対象となるワーク350は、図18に断面を示す構造をなすものであり、軸保持体としての軸保持筒352と、軸保持筒12に回転可能に保持される軸体としての軸部材354とを含んで構成される組立体である。軸保持体352は、概して円筒形状をなし、軸部材354は、軸保持体352の内周面に配設された2つのアンギュラ円すいころ軸受356,358(以下、単に、「アンギュラ軸受356,358」という場合がある)を介して回転可能に保持されている。それら2つのアンギュラ軸受356,358は、先の実施例におけるワーク10のものと同様、それぞれ、アウターレース360,362と、インナレース364,366と、リテーナによって保持されてアウタレース360,362とインナレース364,366との間に介装された転動体としての複数の円すいころ370,372とを含んで構成されている。
【0095】
軸部材354は、軸部380の中間部に大径部382を有しており、この大径部382おり、2つのアンギュラ軸受356,358は、それらのインナレース364,366を挟むように配設されている。この大径部382は、各インナレース364,366の相互接近を禁止する接近禁止部として機能するものとなっている。また、軸保持筒352の図における上端部は、内側に環状に突出する係止環部384とされており、上方に位置するアンギュラ軸受356は、アウタレース360にが係止環部364によって上端が係止されることで、上方への移動が禁止されている。2つのアンギュラ軸受356,358のアウタレース360,362の間には、先の実施例のワーク10のものと同様のスペーサ386が介装されている。軸保持筒352の下端部の内面には雌ねじ390が形成されており、この雌ねじ390に外周部に雄ねじが形成された軸受締付部材としての締付リング392が螺合しており、この締付リング392は、下方に位置するアンギュラ軸受358のアウタレース362の下面に当接する状態とされており、締付リング392を回転させることによって、2つのアンギュラ軸受356,358が締付けられる。なお、締付リング392の下面には、締付け際に、後に説明するリング回転装置との係合のための係合溝394が設けられている。係合溝394は、周方向における4等配の位置のそれぞれにおいて、径方向に延びるように形成されている。
【0096】
軸部材354の上端部はフランジ部396とされており、後に説明するように、ワーク350は、このフランジ部396において、軸受締付装置の固定台に固定される。また、軸保持筒352の下端部は矩形をなす角フランジ部398とされており、後に説明するように、この角フランジ部398において、軸保持筒回転装置と係合させられる。本ワーク350においても、先に説明したワーク10と同様、アンギュラ軸受356,368の締付け程度によって軸部材354と軸保持筒352との相対回転抵抗が変化することになる。
【0097】
要部を図19に示す本変形例の軸受締付装置400は、先に示す軸受締付装置と同様、装置本体としての装置フレームと、ワークを固定する固定台としての固定円盤402と、回転装置ユニット404、制御盤等を含んで構成される。図には、装置フレームの一部,固定円盤402,回転装置ユニット404等のみが表されている。
【0098】
固定円盤402は、水平に配設されており、下面において、ワーク350が、詳しくは、それが備える軸部材354のフランジ部396が、図示を省略する固定機構によって脱着可能に固定される。ワーク350が固定された状態において、軸部材354は、固定円盤402の中央において、それの軸線が垂直つまり固定円盤402と直角となるように位置させられることになる。固定円盤402は、装置フレームの一部をなす2つの垂下柱406に、固定台支持機構を構成する支持部材としての1対の支持板408によって支持されている。それら1対の支持板408の各々は、概して三角形をなして僅かに湾曲する比較的薄いものとされており、垂直に配設され、それの1辺が垂下柱406に固着されるとともに、その1辺と向かい合う頂部が固定円盤402に固着されている。そのような構造から、支持板408は、固定円盤402およびそれに固定されるワーク350の重量をしっかりと支え受けるとともに、後に説明するように、固定円盤402に軸部材354の軸線回りの力が作用する場合に、容易に曲げ弾性変形するものなっている。つまり、本軸受締付装置400においても、支持板408は、固定円盤402を、摩擦抵抗を受けない状態での軸部材354の軸線と直角な平面内における任意の方向へのある範囲における変位を許容しつつ弾性的に支持するものとされているのである。
【0099】
回転装置ユニット404の構造は、先に説明した回転装置ユニット112と略同様の構造となっている。ただし、先の回転装置ユニット112におけるかさ歯車回転装置108が、本回転装置ユニット404における第2回転装置としての締付リング回転装置412とされており、ナット回転装置110が、第1回転装置としての軸保持筒回転装置414とされている。そのため、軸保持筒回転装置414が有する係合外筒416は、軸保持筒352の角フランジ部398と嵌合する矩形嵌合穴を有しており、また、締付リング回転装置412が有する係合内筒418は、係合外筒416内に収容されるように配置され、締付リング392の係合溝394と嵌合する嵌合突起が設けられている。具体的な構造の詳細については、先の回転装置ユニット112と略同様であるため、ここでの説明は省略する。また、本回転装置ユニット404も、先の回転装置ユニット112の場合と同様に、昇降シリンダによって昇降させられる。
【0100】
本軸受締付装置400におけるアンギュラ軸受356,358の締付け程度の管理についても先の軸受締付装置100の場合と同様の考え方に沿って行われるため、ここでの説明は省略する。ただし、固定円盤402の変位量の測定は、差動トランスによらず、撮像デバイスである1対のCCDカメラ420を利用して行われる。固定円盤402の外周面には、中心を挟んだ2箇所の位置の各々に、基準マーク422が設けられている。この2つの基準マーク422が設けられている箇所の各々が設定箇所とされており、本軸受締付装置400では、基準マーク422を撮像した画像について画像処理を行うことによってそれら基準マーク422の各々の変位を認識することで、それら設定箇所の各々の変位量を測定するようにされている。
【0101】
本軸受締付装置400が備える制御装置の構成も、先の軸受締付装置100のものと同様であり、また、本軸受締付装置400の作動についても、先の軸受締付装置100と同様であるため、ここでの説明は省略する。
【0102】
本変形例の軸受締付装置400と、先に説明した実施例の軸受締付装置100とを併せて考えれば、本発明に従う軸受締付装置は、軸保持体を固定して軸体を回転させるような構成の装置であってもよく、軸体を固定して軸保持体を回転させるような構成の装置であってもよいことがわかる。また、軸受締付装置が備える固定台は、狭い意味での台に限定されるものではないことが理解できる。さらに、固定台支持機構も、支持部材として支柱を有するものに限定されず、固定台を摩擦抵抗を受けない状態での軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する種々の機構が採用可能であることがわかる。さらにまた、固定台変位量検出装置の具体的な構成も特に限定されるものではなく、種々の設定箇所変位量測定器を採用可能であることが容易に理解できる。繰り返すが、本発明の軸受締付装置は、上記実施例の装置に決して限定されるものではなく、前述の〔発明の態様〕の項に記載された態様を始めとして、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することができるのである。
【図面の簡単な説明】
【0103】
【図1】実施例の軸受締付装置の作業対象となるワークを示す正面図である。
【図2】図1に示すワークの側面断面図である。
【図3】図1に示すワークの側面断面における分解図である。
【図4】実施例の軸受締付装置を示す全体斜視図である。
【図5】図4に示す軸受締付装置の分解斜視図である。
【図6】軸受締付装置を構成する装置フレームの要部を示す部分斜視図である。
【図7】軸受締付装置を構成するテーブルユニットを示す斜視図である。
【図8】テーブルユニットが備えるテーブルへのワークの搬入の様子を示す斜視図である。
【図9】ワークがテーブルに定置させられた状態を示す斜視図である。
【図10】軸受締付装置を構成する回転装置ユニットを示す斜視図である。
【図11】図10に示す回転装置ユニットの断面図である。
【図12】軸受締付装置を作動させた際にワークのハウジングに対するかさ歯車の回転抵抗に依拠して生じるテーブルの変位の様子を示す斜視図である。
【図13】図12に示すテーブルの変位を誇張して表す平面図である。
【図14】テーブルの変位量と、テーブルに作用する回転トルクおよびかさ歯車とハウジングとの相対回転抵抗との関係を示すグラフである。
【図15】錐体を用いてテーブルに回転トルクを作用させる様子を示す斜視図である。
【図16】軸受締付装置の制御を司る制御装置の要部を示す機能ブロック図である。
【図17】軸受締付装置の作動を制御するための軸受締付装置制御プログラムを示すフローチャートである。
【図18】変形例の軸受締付装置の作業対象となるワークを示す断面図である。
【図19】変形例の軸受締付装置の要部を示す斜視図である。
【符号の説明】
【0104】
10:ワーク(組立体) 12:ハウジング(軸保持体) 14:かさ歯車(軸体) 26,28:アンギュラ円すいころ軸受(転がり軸受,アンギュラ転がり軸受) 30,32:アウタレース 34,36:インナレース 54:接近禁止部 60:雄ねじ部 62:締付ナット(軸受締付部材,ナット部材) 100:軸受締付装置 102:装置フレーム(装置本体) 104:テーブル(固定台) 108:かさ歯車回転装置(第1回転装置) 110:締付ナット回転装置(第2回転装置) 142:支持ロッド(固定台支持機構,支持部材,支柱) 162:固定ピン(固定台変位禁止機構) 270:被測定バー(設定箇所) 272:差動トランス(設定箇所変位量測定器) 286:規制ピン(固体台変位範囲規制機構) 300:制御装置 302:かさ歯車回転装置制御部 304:ナット回転装置制御部 306:回転装置制御部 320:相対回転抵抗推定部 321:回転変位量推定部 350:ワーク(組立体) 352:軸保持筒(軸保持体) 354:軸部材(軸体) 356,358:アンギュラ円すいころ軸受(転がり軸受,アンギュラ転がり軸受) 360,362:アウタレース 364,366:インナレース 382:大径部(接近禁止部) 390:雌ねじ 392:締付リング(軸受締付部材) 400:軸受締付装置 402:固定円盤(固定台) 408:支持板(固定台支持機構,支持部材) 412:リング締付装置(第2回転装置) 414:軸保持筒回転装置(第1回転装置) 420:CCDカメラ(設定箇所変位量測定器) 422:基準マーク(設定箇所)
【技術分野】
【0001】
本発明は、軸体が2つの転がり軸受を介して軸保持体に回転可能に保持された構造の組立体において、それら2つの転がり軸受を、軸方向に締め付けるための装置に関する。
【背景技術】
【0002】
ハウジング等に軸部材を回転可能に保持させる場合に、アンギュラ転がり軸受,スラスト転がり軸受等の軸方向力(スラスト力)を受けることが可能な転がり軸受を用いることが、一般的に行われている。それらの転がり軸受を用いる場合には、通常、それらの転がり軸受を軸方向に互いに離間させて2つ配設し、それら2つの転がり軸受を軸方向に締め付けることによって、ハウジング等に対する軸部材の軸方向における位置が固定されることになる。この軸受の締付けは、例えば、軸部材に設けられた雄ねじに螺合する雌ねじを有するナット等の締付部材を利用し、その締付部材を回転させることによって行われる。
【0003】
上記転がり軸受の締付けにおいては、その締付けの程度(締付量,締付力等)を管理することが重要となる。詳しく言えば、強く締め付ければ、転がり軸受が有する玉,ころ等の転動体への負荷が大きくなり、軸部材の回転に対する抵抗が大きくなるため、締付けの程度を適切に管理することが必要となるのである。そのため、上記転がり軸受の締付けにおいては、従来から、軸部材の回転抵抗を把握しつつ、締付け作業を行っている。具体的に言えば、回転テーブルにハウジング等を固定した状態において、ハウジング等に保持された軸部材を回転させ、上記回転抵抗に起因して発生する回転テーブルの回転力をロードセル等を用いて検出することで上記回転抵抗を把握し、その把握した回転抵抗を考慮しつつ締付け作業を行っている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述したように、上記従来の締付け作業において、軸部材の回転抵抗は、回転テーブルの回転力の検出に基づく方法によって把握される。ところが、いわゆる回転テーブルは、回転のみが可能に支持されたテーブルであり、例えば、支持機構において軸受等を必要とする。そのため、その軸受等によって支持されることに起因する回転テーブルの回転抵抗、つまり、回転テーブルの変位に対する摩擦抵抗が存在し、従来の方法では、回転テーブルの回転力を検出しても、上記転がり軸受を締め付けることによって発生する軸部材の回転抵抗を正確に把握することが困難となっている。したがって、その方法を採用する従来の締付け作業は、軸受の締付けの程度を充分に管理し得ないものとなっている。本発明は、そのような実情に鑑みてなされたものであり、軸保持体に軸体が回転可能に保持された構造の組立体においてそれら軸保持体と軸体とを連結する2つの転がり軸受を軸方向に締め付けるための軸受締付装置であって、それら2つの転がり軸受の締付け程度の管理を正確に行い得る軸受締付装置を提供することを課題とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の軸受締付装置は、(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、(A)装置本体と、(B)前記軸体と前記軸保持体との他方が固定される固定台と、(C)前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、(D)前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、(E)前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、(F)前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、(G)前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明の軸受締付装置は、軸受の締付作業の際、軸体と軸保持体とを相対回転させるべくそれらの一方を回転させるようにされており、それらの他方を固定する固定台の支持機構として、摩擦抵抗のない状態での固定台の変位を許容しつつ弾性的に支持する機構を採用し、軸体と軸保持体との相対回転に対する抵抗に起因する固定台の回転変位量を検出するようにされている。そのため、上述のように弾性的に支持された固定台の変位に基づけば、軸体と軸保持体との相対回転に対する抵抗を正確に把握することが可能となる。したがって、本発明の軸受締付装置によれば、2つの転がり軸受の締付け作業において、それら軸受の締付け程度の管理を正確に行なうことが可能となる。
【発明の態様】
【0007】
以下に、本願において特許請求が可能と認識されている発明(以下、「請求可能発明」という場合がある)の態様をいくつか例示し、それらについて説明する。各態様は請求項と同様に、項に区分し、各項に番号を付し、必要に応じて他の項の番号を引用する形式で記載する。これは、あくまでも請求可能発明の理解を容易にするためであり、それらの発明を構成する構成要素の組み合わせを、以下の各項に記載されたものに限定する趣旨ではない。つまり、請求可能発明は、各項に付随する記載,実施例の記載等を参酌して解釈されるべきであり、その解釈に従う限りにおいて、各項の態様にさらに他の構成要素を付加した態様も、また、各項の態様から構成要素を削除した態様も、請求可能発明の一態様となり得るのである。
【0008】
なお、以下の各項において、(1)項が請求項1に相当し、(4)項が請求項2に、(6)項が請求項3に、(7)項が請求項4に、(8)項が請求項5に、(11)項が請求項6に、それぞれ相当する。
【0009】
(1)(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、
装置本体と、
前記軸体と前記軸保持体との他方が固定される固定台と、
前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、
前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、
前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、
前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、
前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置と
を備えた軸受締付装置。
【0010】
本項に記載の態様の軸受締付装置は、組立体において軸体を軸保持体に回転可能に保持させるために設けられた2つの転がり軸受を、軸体と軸保持体との一方に設けられたねじに螺合する締付部材を回転させることによって、軸線方向に締め付ける作業を行うための装置であり、軸体と軸保持体との他方を固定し、軸体と軸保持体との一方を回転させることで、軸体と軸保持体との相対回転に対する抵抗を把握可能されている。詳しく言えば、本態様の軸受締付装置では、その固定台の支持機構として、摩擦抵抗のない状態での固定台の変位を許容する弾性的な支持機構を採用しており、軸体と軸保持体との一方を回転させた際、支持機構の構造に依拠して生じる固定台の変位の量を検出することで、軸体と軸保持体との相対回転抵抗を把握可能とされているのである。先に説明したように、従来の装置では、軸体と軸保持体との他方が固定された回転テーブルの回転力によって上記相対回転抵抗を把握するように構成されているため、回転テーブルの回転に対する摩擦抵抗が存在し、その摩擦抵抗が原因して、上記相対回転抵抗を正確に把握することが困難なものとなっていた。それに対し、本項の態様の軸受締付装置では、回転テーブルを採用せず、上記構造の支持機構によって支持された固定台を採用する。したがって、その固定台の上記回転変位量に基づいて、詳しく言えば、摩擦抵抗のない状態での回転変位量に基づいて、軸体と軸保持体との相対回転抵抗を把握可能であるため、その相対回転抵抗を正確に把握することが可能となる。したがって、本項の態様の軸受締付装置によれば、上記2つの軸受の締付けの程度、詳しく言えば、締付け力,締付け量等の管理が正確に行えることになるのである。なお、本明細書において、「相対回転抵抗を把握する」とは、上記相対回転抵抗を検出することのみを意味するのではなく、広く解釈し、上記回転変位量等を始め、相対回転抵抗を指標するあるいは相対回転抵抗を推定可能な何らかのパラメータを取得あるいは推定することをも意味する。
【0011】
本項の態様の軸受締付装置の作業対象となる組付体は、上記構成である限り、その具体的構成が特に限定されるものではない。例えば、「軸体」は、組立体において回転可能とされるものであればどのようなものであってもよく、例えば、何らかの装置を構成する軸部材,軸部品等が、軸体となり得る。また、単なる軸状の部材,部品等だけでなく、例えば、軸状の部分を有してその部分にギヤ,プーリ等の他の構成部分が一体的にあるいは取り付けられることによって設けられたような部材,部品等であってもよい。「軸保持体」も、軸体を回転可能に保持可能な部材,部品等であればよく、具体的には、例えば、何らかの装置を構成するハウジング,ケーシング,ベース,フレーム,躯体等が、軸保持体となり得る。
【0012】
上記組立体を構成する「転がり軸受」は、少なくとも軸線方向の荷重(スラスト荷重)を受けるものであればよく、径方向の荷重(ラジアル荷重)をも受けることが可能なものであってもよい。また、転がり軸受が有する転動体は、玉,ころ等のいずれであってもよい。上記組立体において採用可能な「転がり軸受」は、具体的には、例えば、スラスト転がり軸受、アンギュラ転がり軸受(いわゆる呼び接触角が0゜ではない転がり軸受)等であり、より詳しく言えば、スラスト転がり軸受としては、スラスト玉軸受,スラスト円すいころ軸受等を、また、アンギュラ転がり軸受としては、アンギュラ玉軸受,アンギュラ円筒ころ軸受、アンギュラ円すいころ軸受等を採用可能である。組立体は2つの転がり軸受を含んで構成されているが、それら2つの軸受がアンギュラ転がり軸受である場合には、それらの2つの軸受は、呼び接触角が0゜を挟んで一方がプラスの角度となり、他方がマイナスの角度となるようなものを組み合わせることが望ましい。換言すれば、一方の軸受と他方の軸受とが互いに反対方向のスラスト荷重を受けるようなものを組み合わせることが望ましい。
【0013】
上記組立体を構成する「軸受締付部材」は、軸体と軸保持体とのいずれと螺合する部材であってもよい。例えば、軸体に雄ねじが形成されている場合に、その雄ねじと螺合する雌ねじを有するナット的な部材であってもよく、また、例えば、軸保持体に雌ねじが形成されている場合に、その雌ねじと螺合する雄ねじを有する概してリング状の部材であってもよい。また、軸受締付部材は、「2つの転がり軸受を軸線方向に締め付ける」部材であり、例えば、互いに離間して配設された2つの転がり軸受の相互間距離が小さくなる向きの力を与える部材とすることが可能である。さらに言えば、軸体と軸保持体との一方に自身と対向して設けられた軸方向支持部との間で2つの軸受を挟持して(直接的でもよく、また、何らかの部材を介して間接的に挟持してもよい)、それら2つの軸受が接近する方向の力を2つの軸受の一方に付与するような部材とすることが可能である。軸受締付部材によって2つの軸受を軸線方向に締め付けることで、軸体と軸保持体との軸線方向における相対位置を固定することが可能となる。
【0014】
本項に記載の態様の軸受締付装置を構成する「装置本体」は、いわゆるベース、フレーム等、当該軸受締付装置の躯体として機能する部分を含んで構成されるものであればよい。「固定台」は、組立体を支持するものであり、詳しく言えば、軸体と軸保持体との他方、つまり、軸体と軸保持体とのうち上記軸受締付部材が螺合される方とは別の方のものを、固定支持するものである。固定台は、狭い意味における台状のものに限定されない。例えば、軸体と軸保持体との他方を下方から支え受けるものに限定されず、軸体と軸保持体との他方を側方から、あるいは、上方から固定支持するものであってもよいのである。また、「固定台」は、軸体と軸保持体との他方を直接固定するものに限定されない。例えば、軸体と軸保持体との他方がパレット等の保持部材に固定保持された状態において、その保持部材を固定支持することによって、軸体と軸保持体との他方を固定支持するものであってもよい。つまり、固定台は、軸体と軸保持体との他方を、何らかの部材,部品等を介して間接的に固定支持するものであってもよいのである。
【0015】
固定台を支持する「固定台支持機構」は、固定台に組立体が支持された状態において、少なくとも、固定台の上記軸体の軸線と直角な平面に沿った任意方向の変位を許容するもの、つまり、その平面に沿ったいずれの方向への変位をも許容するものとされている。また、固定台支持機構は、少なくとも、固定台の上記軸体の軸線と直角な平面に沿った任意方向の変位を許容するものであればよく、その平面と交差する方向の変位をも許容するものであってもよい。さらに、固定台支持機構は、固定台の変位を摩擦抵抗を受けない状態で許容するものであり、例えば、何らかの部品,部材等と摺接しあるいはそれらと何らかの転動体を介して係合することで変位に対する規制が存在する状態ではない状態で、固定台を支持するような構造とすればよい。さらにまた、固定台支持機構は、「弾性的に」固定台を支持するものであり、例えば、軸体と軸保持体との他方に何らかの力が作用した場合に、その力の大きさに応じた変位量変位するように固定台を支持するような構造のものとすればよい。
【0016】
本項に記載の軸受締付装置を構成する「第1回転装置」は、固定台に固定された軸体と軸保持体との他方に対して、軸体と軸保持体との一方を回転させるものであり、言い換えれば、軸体と軸保持体とを相対回転させる装置と考えることが可能である。また、「第2回転装置」は、第1回転装置によって回転可能とされている軸体と軸保持体との一方に対して、その一方に螺合する上記軸受締付部材を回転させるものであることから、本項に記載の軸受締付装置は、第1回転装置と第2回転装置とによって、軸体と軸保持体との一方と軸受締付部材とを相対回転させて、軸受の締付けを実行する装置と考えることができる。第1回転装置および第2回転装置は、具体的な構成が特に限定されるものではなく、例えば、第1回転装置は、モータ等の回転駆動源と、回転可能な状態で軸体と軸保持体との一方と係合する回転係合体と、回転駆動源と回転係合体との間に設けられた回転伝達機構(ギヤ,ベルト等を含んで構成される減速機構等)とを含んで構成されるものとすることが可能であり、また、同様に、第2回転装置は、回転駆動源と、軸受締付部材と係合する回転係合体と、回転伝達機構とを含んで構成されるものとすることが可能である。なお、第1回転装置,第2回転装置は、回転速度,回転トルク等が可変な構造のものとすることが望ましく、当該軸受締付装置は、それら第1回転装置,第2回転装置の回転速度,回転トルク等を変化させるための制御装置を備えることが望ましい。
【0017】
本項に記載の軸受締付装置を構成する「固定台変位量検出装置」は、上記固定台支持機構によって弾性的に支持された固定台の変位の量を検出する装置であり、詳しくは、固定台に組立体が支持された状態における軸体の軸線まわりの回転変位量を検出する装置である。具体的な構成が特に限定されるものではないが、固定台は固定台支持機構によって上記軸線に直角な平面内の任意の方向の変位が許容されているため、例えば、後に説明するように、固定台の特定箇所の特定方向の変位量を測定する測定器と、その測定器による測定結果に基づき演算処理等によって上記回転変位量を推定する手段(例えば、コンピュータ等)とを含んで構成することが可能である。また、例えば、固定台あるいはそれの一部分を撮像する撮像デバイスと、そのデバイスによって得られた画像に基づいて上記回転変位量を検出する手段(例えば、画像処理コンピュータ等)を含んで構成することも可能である。
【0018】
本項に記載の軸受締付装置を構成する「検出結果依拠処理実行装置」は、上記固定台変位量検出装置によって検出された固定台の上記回転変位量に基づいて、何らかの処理を実行する装置である。具体的には、例えば、軸体と軸保持体との相対回転に対する抵抗の推定、軸受締付部材による軸受の締付力の推定、第1回転装置,第2回転装置の作動の制御等、種々の処理のうちの1以上の処理を行うような装置とすることが可能である。検出結果依拠処理実行装置は、その処理内容に応じて適切な種々の態様のものとして構成することが可能であるが、例えば、コンピュータを主体とする装置とすることが可能である。
【0019】
(2)当該軸受締付装置が、前記2つの転がり軸受の各々がアンギュラ転がり軸受である前記組立体に対して、それら2つのアンギュラ転がり軸受の締め付けを実行するための装置である(1)項に記載の軸受締付装置。
【0020】
本項に記載の態様は、組立体を構成する2つの転がり軸受を、アンギュラ転がり軸受に限定した態様である。2つの転がり軸受を軸線方向に締め付ける場合、アンギュラ転がり軸受の場合は、スラスト転がり軸受の場合と比較して。その締付けの程度の差による軸体と軸保持体との相対回転抵抗の差が小さい。そのため、アンギュラ転がり軸受を含んで構成された組立体に対して締付け程度を管理する場合、より正確な相対回転抵抗の把握が必要となる。したがって、本項の態様によれば、アンギュラ転がり軸受を備えた組立体に対して、正確な締付け程度の管理が可能となる。
【0021】
(3)前記組立体が、前記2つのアンギュラ転がり軸受の各々のアウタレースの接近を禁止するアウタレース接近禁止部を前記軸保持体において備え、前記軸受締付部材が、前記軸体に設けられた雄ねじに螺合する雌ねじを有して前記軸体の一部との間で前記2つのアンギュラ転がり軸受のインナレースを挟持するナット部材である(2)項に記載の軸受締付装置。
【0022】
本項に記載の態様は、アンギュラ転がり軸を採用する組立体の構成をより具体的に限定した一態様である。上記構成の組立体においてアンギュラ転がり軸受を軸線方向に締め付ければ、軸体を軸保持体に回転可能に保持させつつ軸体と軸保持体との軸線方向における相対位置を固定することを、容易に行うことができる。
【0023】
(4)当該軸受締付装置が、
前記第1回転装置と第2回転装置とを同時期に作動させることで、前記軸体と軸保持体との一方と前記軸受締付部材とを相対回転させ、その相対回転によって前記2つ転がり軸受の締め付けを実行する構成とされた(1)項ないし(3)項のいずれかに記載の軸受締付装置。
【0024】
当該軸受締付装置では、第1回転装置による軸体と軸保持体との一方の回転を禁止する状態で、第2回転装置によって軸受締付部材を回転させて2つの軸受を締め付け、第2回転装置が軸受締付部材に対して何らの作用を及ぼさない状態で、第1回転装置によって第1回転装置によって軸体軸保持体との一方を回転させて、軸体と軸保持体との相対回転に対する抵抗を把握するような態様とすることもできる。本項に記載の態様によれば、その態様と異なり、第1回転装置と第2回転装置とを同時期に作動させて軸体と軸保持体とを相対回転して締付け作業を行うため、軸受を締め付けつつ上記相対回転に対する抵抗を把握することが可能となる。
【0025】
(5)当該軸受締付装置が、
前記第1回転装置によって前記軸体と軸保持体との一方を定速で回転させ、前記第2回転装置による前記軸受締付部材の回転速度を変化させて前記2つの転がり軸受の締付けを実行する構成とされた(4)項に記載の軸受締付装置。
【0026】
本項に記載の態様によれば、軸体と軸保持体との相対回転速度を一定に維持しつつ、軸受の締付け速度を変化させることが可能となる。したがって、軸体と軸保持体との相対回転に対する抵抗をより正確に把握しつつ、軸受の締付けの程度の調整を容易に行うことが可能となる。
【0027】
(6)前記検出結果依拠処理実行装置が、前記固定台変位量検出器による検出結果に基づいて、前記第1回転装置と前記第2回転装置との少なくとも一方の作動を制御して、前記軸体と軸保持体との一方と前記軸受締付部材との相対回転速度を制御する回転装置制御部を有する(4)項または(5)項に記載の軸受締付装置。
【0028】
本項に記載の態様は、検出結果依拠処理実行装置が、固定台の軸体の軸線まわりの回転変位量に基づく処理として、軸受の締付け速度の制御を実行する態様である。上記回転変位量に基づけば、軸体と軸保持体との相対回転に対する抵抗を把握可能であり、本項の態様によれば、その抵抗の把握下において締付け速度の制御が可能となることから、軸受の締付けを実行しつつその締付けの程度を正確に管理できることになる。本項に記載の態様には、具体的には、上記回転変位量が設定された変位量となった場合に、つまり、把握される締付けの程度が目標とする締付けの程度に近づいた場合に、軸体と軸保持体との一方と軸受締付部材との相対回転速度、すなわち、締付け速度が減少するように、第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様が含まれる。また、本項の態様においては、上記相対回転速度の制御は、その回転速度が0となるような制御も含まれ、本項の態様には、上記回転変位量が設定された変位量となった場合に、つまり、把握される締付けの程度が目標とする締付けの程度となった場合に、軸体と軸保持体との一方と軸受締付部材との相対回転速度を0とするように、すなわち、締付けの実行を停止あるいは終了するように、第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様が含まれる。なお、本項に記載の態様には、後に説明するように、上記回転変位量に基づき軸体と軸保持体との相対回転抵抗を推定し、その推定結果に基づいて第1回転装置と第2回転装置との少なくとも一方の作動を制御する態様も含まれる。
【0029】
(7)前記検出結果依拠処理実行装置が、前記固定台変位量検出装置による検出結果に基づいて、前記軸体と前記軸保持体との相対回転に対する抵抗を推定する相対回転抵抗推定部を有する(1)項ないし(6)項のいずれかに記載の軸受締付装置。
【0030】
本項に記載の態様は、検出結果依拠処理実行装置が、固定台の軸体の軸線まわりの回転変位量に基づく処理として、軸体と軸保持体との相対回転に対する抵抗を推定する態様である。平たく言えば、本項の態様は、軸体と軸保持体との相対回転抵抗を推定することで、その相対回転抵抗を直接的に把握する態様である。本項の態様は、相対回転抵抗を推定し、その推定された相対回転抵抗に基づき、上述した締付け速度を減少させる制御,締付けを停止あるいは終了させる制御を行うような態様とすることも可能である。
【0031】
(8)前記固定台変位量検出装置が、
それぞれが、前記固定台の前記軸体の軸線と直角な平面内において互いに離間して設定された複数の箇所の各々の設定方向における変位量を測定する複数の設定箇所変位量測定器と、
それら複数の設定箇所変位量測定器の測定結果に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定する回転変位量推定部と
を含んで構成された(1)項ないし(7)項のいずれかに記載の軸受締付装置。
【0032】
先に説明したように、固定台は、固定台支持機構によって、軸体の軸線と直角な平面内における任意の方向の変位が許容されているため、つまり、いずれの方向への変位も許容されているため、固定台の特定の一箇所の変位量によって上記軸線まわりの回転変位量を検出する場合、充分に正確な回転変位量を推定することは難しい。本項に記載の態様によれば、固定台における複数箇所の各々の特定方向の変位量に基づいて上記回転変位量を推定するため、充分に正確な回転変位量の検出が可能となる。なお、複数の箇所の変位量に基づく上記回転変位量の推定は、各箇所の位置関係とその各箇所の変位方向および変位量とに基づき、幾何学的な手法に従って行うことが可能である。また、「設定箇所変位量測定器」は、適切なセンサ,変位計等を含んで構成されればよく、できれば、固定台に殆ど力を付与しない構造のセンサ,変位計等を含んで構成されることが望ましい。具体的には、例えば、ポテンショメータ,光導電素子変位計,渦電流変位センサ,差動トランス,静電容量型変位計,ホール阻止変位センサ,半導体磁気抵抗素子変位センサ,インダクトシン,マグネスケール,電気マイクロメータ,リニアエンコーダ等を含んで構成されるものを採用することが可能である。
【0033】
(9)前記固定台変位量検出装置が、
前記複数の設定箇所変位量測定器として、それぞれが、前記軸体の軸線を通る一直線上においてその軸線を挟んだ2箇所の各々の変位量であって、前記一直線と直交する方向における変位量を測定する2つの設定箇所変位量測定器を含んで構成された(8)項に記載の軸受締付装置。
【0034】
本項に記載の態様は、上記特定の2箇所の互いに同じ特定方向の変位量に基づいて、上記回転変位量を推定する態様である。本項に記載の態様によれば、少ない箇所の変位量に基づいて回転変位量を推定できるため、簡便な推定が可能となる。
【0035】
(10)前記2つの設定箇所変位量測定器が、前記軸体の軸線からの距離が互いに等しい前記2箇所の各々の変位量を測定するものとされ、
前記回転変位量推定部が、前記2つの設定箇所変位量測定器によって測定された前記2箇所の各々の変位量の和に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定するものである(9)項に記載の軸受締付装置。
【0036】
本項の態様における特定の2箇所は、上記軸線を挟んでその軸線から同じ距離離れた2箇所とされている。そのため、本項に記載の態様によれば、幾何学的に考えれば容易に判るように、より簡便に上記回転変位量を推定することが可能である。また、後に詳しく説明するように、軸体と軸保持体との相対回転抵抗に起因する固定台の変位が、上記軸線を中心とする回転変位以外に、固定台の任意の方向の移動を伴う変位を含む場合であっても、回転変位量を容易に推定することが可能である。なお、固定台が上記軸線を中心とした正確な回転変位を伴う場合、上記軸線と直交する一方向の変位量は、一方の測定箇所では+の値となり、他方の測定箇所では−の値となる。そのような場合において、本項にいう「変位量の和」とは、それらの変位量の絶対値の和を意味する。
【0037】
(11)前記固定台支持機構が、
それぞれが、一端部において前記装置本体に固定されるとともに他端部において前記固定台に固定され、弾性変形可能な複数の支持部材を含んで構成された(1)項ないし(10)項のいずれかに記載の軸受締付装置。
【0038】
本項に記載の態様のように、弾性変形可能な支持部材によって固定台を支持させれば、摩擦抵抗のない状態での固定台の変位を許容する構造が容易に実現することになる。
【0039】
(12)前記固定台支持機構が、
前記複数の支持部材として、それぞれが、前記装置本体に立設されて前記固定台を支持するとともに任意の方向に弾性的に曲げ変形可能な複数の支柱を含んで構成された(11)項に記載の軸受締付装置。
【0040】
本項に記載の態様は、固定台支持機構を、弾性変形可能な支持部材として弾性的に曲がる支柱を複数採用し、それら支柱によって支持台を支え受けるように構成した態様である。支柱状の支持部材を採用すれば、固定台およびそれに固定された組立体の重量をしっかりと支え、かつ、軸体と軸保持体との相対回転抵抗に応じた量の固定台の変位を許容することが、容易に可能となる。
【0041】
(13)前記第1回転装置および前記第2回転装置が、前記固定台と前記装置本体との間に配設された(12)項に記載の軸受締付装置。
【0042】
固定台支持機構に上記支柱を採用する場合、固定台と装置本体の間に比較的大きな空間を存在させることが可能である。本項に記載の態様は、この空間に、上記第1回転装置と第2回転装置とを配設した態様であり、本項に記載の態様によれば、固定台の上方に当該装置の構成要素が存在しないような構造の軸受締付装置を実現させることが可能となる。そのような軸受締付装置によれば、組立体の固定台への載置,固定台からの離脱等の作業性が良好となる。
【0043】
(14)当該軸受締付装置が、前記固定台の変位を禁止する固定台変位禁止機構を備えた(1)項ないし(13)項のいずれかに記載の軸受締付装置。
【0044】
固定台を弾性的に支持する固定台支持機構を採用する場合、第1回転体による軸体と軸保持体との一方の回転に起因する場合以外においても、固定台は、容易に変位する。例えば、組立体を固定台に支持させるあるいは固定台から取り外す作業等を行うような場合において、固定台に対して外部から力が加わったときにも固定台が変位してしまい、そのような作業等の作業性が悪化する可能性がある。本項に記載の態様は、そのような可能性に配慮したものであり、本項の態様によれば、例えば、任意に固定台を定置させることが可能となり、固定台への組立体の脱着等の作業の作業性を向上させることが可能となる。なお、「固定台変位禁止機構」は、それの具体的な構造が特に限定されるものではなく、例えば、任意の操作,指令等によって、固定台を装置本体に係止するような構造のものを採用することが可能である。
【0045】
(15)当該軸受締付装置が、前記固定台の変位が許容される範囲を規制する固定台変位範囲規制機構を備えた(1)項ないし(14)項のいずれかに記載の軸受締付装置。
【0046】
固定台を弾性的に支持する固定台支持機構を採用する場合、軸体と軸保持体との他方を固定台に固定して軸体と軸保持体との一方を上記第1回転装置によって回転させた場合に、軸体と軸保持体との相対回転抵抗に応じた変位量固定台が変位することになる。その場合、例えば、相対回転抵抗が大きな場合等においては、過度に固定台が変位することになる。この過度の変位は、例えば、変位量の測定精度の悪化、固定台支持機構を構成する部材の塑性変形等の種々の問題を引き起こす可能性がある。本項に記載の態様は、そのような可能性に配慮したものであり、本項の態様によれば、過度な固定台の変位が禁止され、過度な固定台の変位によって引き起こされる上記種々の問題の発生を未然に防止することが可能である。なお、「固定台変位範囲規制機構」は、それの具体的な構造が特に限定されるものではなく、例えば、固定台が設定された変位量となった場合に、固定台のそれ以上の変位を禁止するためのストッパ的な構造のものを採用することが可能である。
【実施例】
【0047】
以下、本発明の一実施例および変形例を、図を参照しつつ詳しく説明する。なお、本発明は、下記実施例の他、前記〔発明の態様〕の項に記載された態様を始めとして、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することができる。
【0048】
<軸受締付装置が対象とするワーク>
実施例の軸受締付装置が作業対象とするワークを、図1〜図3に示す。図1は正面図、図2は側面断面図であり、図3は、側面断面における分解図である。ワーク10は、軸保持体としてのハウジング12と、ハウジング12に回転可能に保持される軸体としてのかさ歯車14(「ピニオン」と呼ぶこともできる)とを含んで構成される組立体であり、車両の終減速装置の一部を構成するものである。このハウジング12の中には、デファレンシャルケースとそれの内部に配置された差動小歯車および差動大歯車からななる差動装置(図示を省略)が配設され、かさ歯車14は、当該終減速装置における入力歯車としての減速小歯車として機能し、デファレンシャルケースの外部に設けられた減速大歯車と噛合するようにされている。
【0049】
ハウジング12には、保持穴16が設けられており、ハウジング12は、その保持穴16においてかさ歯車14を保持する。かさ歯車14は、軸部18と、軸部18の図における上端部に軸部18と一体に設けられた歯車部20と、軸部18の図における下端部に軸部18と一体的に形成されて外周にセレーションが形成されたセレーション部22とを含んで構成されており、軸部18が、ハウジング12の保持穴16に、2つのアンギュラ円すいころ軸受26,28(以下、単に、「アンギュラ軸受26,28」という場合がある)を介して保持されることで、かさ歯車14が、ハウジング12に対して回転可能とされている。
【0050】
さらに詳しく説明すれば、2つのアンギュラ軸受26,28は、それぞれ、アウターレース30,32と、インナレース34,36と、リテーナ38,40によって保持されてアウタレース30,32とインナレース34,36との間に介装された転動体としての複数の円すいころ42,44とを含んで構成されており、アウタレース32,33の各々が、ハウジング12に設けられた保持穴16の構成部分である嵌合穴部46,48の各々に嵌め入れられ、インナレース34,36の各々に、かさ歯車14の軸部18における大径部50と小径部52の各々が嵌め入れられている。嵌合穴部46と嵌合穴部48との間の内径が小さくされている部分(以下、「接近禁止部54」と呼ぶことがある)は、アンギュラ軸受26,28の各々のアウタレース30,32によって挟まれ、それらアウタレース30,32の相互接近を禁止する部分とされている。
【0051】
軸部18には環状のワッシャ56が嵌められており、そのワッシャ56は、図の上方に位置するアンギュラ軸受26のインナレース34とかさ歯車14の歯車部20の下端面との間に挟まれている(ワッシャ56は、かさ歯車14の一部とみなすこともできる)。また、軸部18には、軸方向の中央部が全周にわたって径方向に突出する短い筒状のスペーサ58が嵌められており、そのスペーサ58は、アンギュラ軸受26,28の各々のインナレース34,36の間に挟まれている。さらに、軸部18の図における下部には雄ねじが形成された雄ねじ部60とされており、その雄ねじ部60に、軸受締付部材としての締付ナット62(六角ナットである)が螺合させられている。つまり、インナレース34,36は、それらの間にスペーサ58が介装される状態で、歯車部20と締付ナット62とによって挟持されているのである。
【0052】
締付ナット62を回転させて2つのアンギュラ軸受26,28を締め付けることにより、インナレース34,36は相互に接近する方向の力を受ける状態となり、その状態において、かさ歯車14のハウジング12に対する軸方向の位置が固定されることになる。ちなみに、スペーサ58は、2つのアンギュラ軸受26,28が締め付けられた状態において、軸方向の寸法が縮むように塑性変形させられるが、スプリングバックにより、インナレース34,36が相互に離間する方向の力を発生させ、締付ナット62の緩みを効果的に防止している。
【0053】
先に説明したように、2つのアンギュラ軸受26,28を締め付けることにより、インナレース34,36は相互に接近する方向の力を受ける。一方、2つのアンギュラ軸受26,28のアウタレース30,32は、軸保持穴16に設けられた接近禁止部54によって、相互に接近することが禁止されている。そのため、2つのアンギュラ軸受の26,28の各々の円すいころ42,44の各々に、負荷がかかることになる。円すいころ42,44の各々は、アウタレース30,32の各々とインナレース34,36の各々とにアンギュラコンタクトしているため(呼び接触角が0゜ではないため)、その負荷は、アウタレース30,32の各々とインナレース34,36の各々との相対回転に対する抵抗、すなわち、かさ歯車14のハウジング12に対する回転抵抗となる。上記負荷は、2つのアンギュラ軸受26,28の締付けの程度によって変化し、きつく締め付けるほど、つまり、締付け量が大きいほど、大きくなり、締付けの程度が大きくなるにつれて、かさ歯車14の回転抵抗は大きくなる。したがって、2つのアンギュラ軸受26,28の締付けの程度を管理することは重要であり、以下に説明する本実施例の軸受締付装置では、その締付けの程度を把握しつつ、締付け作業を行うようにされている。
【0054】
<軸受締付装置の構成>
実施例の軸受締付装置の全体斜視図を図4に示し、分解斜視図を図5に示す。軸受締付装置100は、装置本体を構成する装置フレーム102と、前述したワーク10が固定されるテーブル104を備えたテーブルユニット106と、ワーク10が固定された状態において前述のかさ歯車14,締付ナット62の各々を回転させるかさ歯車回転装置108,締付ナット回転装置110を備えた回転装置ユニット112と、装置フレーム102上に固定されて本軸受締付装置100の制御を司る制御装置を内蔵する制御盤114とを含んで構成されている。なお、以下の説明では、図4,図5における斜め左下方を装置の手前側(前方)と、斜め右上方を装置の奥側(後方)と称し、斜め左上方を装置の左側(左方)と、斜め右下方を装置の右側(右方)と称することとする。
【0055】
装置フレーム102は、ベースフレーム120と、ベースフレーム120の前後における中央部に立設された立設支持板122と、立設支持板122の手前側を囲うように設けられたアングルフレーム124とを含んで構成されている。図6に示すように、立設支持板122には、上下方向に延びる1対のガイドレール126が固定して設けられており、それら1対のガイドレール126の各々に対して、2つのスライドブロック128が摺動可能に配設されている。また、立設支持板122には、昇降シリンダ130が固定して設けられている。後に詳しく説明するが、回転装置ユニット112は、スライドブロック128に取り付けられ、油圧駆動される昇降シリンダ130によって昇降させられる。
【0056】
テーブルユニット106は、図7に示すように、ワーク10が固定される固定台としてのテーブル104と、装置フレーム102を構成するベースフレーム120に固定されるベース板140と、それぞれがベース板140に立設されてテーブル104を支持する4つの支柱ロッド142とを含んで構成されている。各支持ロッド142は、テーブル104を支持する支持部材として、詳しくは支柱として、機能するものとされており、下端部が、ベース板140を介して装置フレーム102に固定され、上端部が、テーブル104の下面に固定されている。また、各支持ロッド142は、比較的細いものされており、テーブル104およびそれに載置されるワーク10の重量を充分に支えることができるが、テーブル104を前後左右方向に移動させる力に対しては、容易に、弾性変形可能、詳しくは、任意の方向に弾性的に曲げ変形可能とされている。本軸受締付装置100においては、それら支持ロッド142を含んで、固定台であるテーブル104を支持する固定台支持機構が構成されているのである。
【0057】
図8に示すように、ワーク10は、パレット144に固定され、図9に示すように、パレット144に固定された状態で、テーブル104に固定される。パレット144は、底板部146と背板部148とを有する断面が概してL字形状をなしており、ワーク10は、底板部146に載せ置かれ、ハウジング12の底部が、図示を省略する固定具によって固定される。底板部146には、図では省略するが、開口が設けられており、ワーク10が備えるかさ歯車14の下端部であるセレーション部22が、その開口から下方に臨み出るようにされている。
【0058】
テーブル104は、台板150と、台板150の前後に立設されてそれぞれの向かい合う面に4つのローラ152が取り付けられたた1対の立設板154,156とを含んで構成されており、パレット144に固定されたワーク10は、パレット144がそれらローラ152の上に乗る状態で移動させられて、当該軸受締付装置100の右方から搬入される。図では省略するが、テーブル104には、係止解除可能なストッパが設けられており、係止可能状態とされたストッパにパレット144が係止されることで、搬入されたワーク10の左右方向における位置決めがなされる。左右方向における位置決めがなされた状態において、パレット144の底板部146の前端と前方側の立設板154との間に、図示を省略する楔状の固定具が挿し込まれることによって、パレット144の後方端が立設板156に押付けられる状態となり、ワーク10の前後方向の位置決めがなされるとともに、パレット144がテーブル104にしっかりと固定される。ワーク10のテーブル104への載置は、そのようにして行われる。
【0059】
なお、図6に示すように、アングルフレーム124には、1対のブラケット160の各々によって支持される状態で、1対の固定ピン162を備えてそれら固定ピン162の各々を上下方向に進退させる1対の固定ピン進退シリンダ164(圧縮空気で駆動される)が設けられている。固定ピン162の各々は、シリンダ164の各々によって上方に進出させられた状態において、テーブル104の台板150の前端部に設けられた2つのピン穴168の各々に嵌め入れられるようにされている。固定ピン162とピン穴168とは殆どクリアランスを有しておらず、2つの固定ピン162の各々が2つのピン穴168の各々に嵌め入れられた状態において、テーブル104は、前後左右の変位が禁止される状態となる。上記ワーク10の搬入作業およびパレット144の固定作業を行う際には、各固定ピン162が各シリンダ164によって進出させられることで各ピン穴168に嵌め入れられ、テーブル104の変位が禁止された状態で、それらの作業を行なうことが可能となっている。つまり、固定ピン162,固定ピン進出シリンダ164,ピン穴168等を含んで、固定台としてのテーブル104の変位を禁止する固定台変位禁止機構が構成されており、本軸受締付装置100では、その機構によって、上記搬入作業,固定作業の容易化が図られることになる。
【0060】
上述のように位置決め固定されたワーク10は、図9に示す状態となり、その状態において、ワーク10が備えるかさ歯車14の軸線が、テーブル104の台板150と直交し、台板150に設けられた円形の開口170の中心線と一致するように、軸受締付装置100に対して定置された状態となる。その定置された状態において、回転装置ユニット112は、その開口170を利用してワーク10と係合し、後に説明するように、かさ歯車14および締付ナット62が回転させられる。
【0061】
図10および断面を図11に示す回転装置ユニット112は、基体180と、その基体180に支持されたかさ歯車回転装置108および締付ナット回転装置110とを含んで構成されている。見方を変えて言えば、回転装置ユニット112は、基体180と、その基体180に支持された第1モータ182および第2モータ184と、基体180に支持されてそれら第1モータ182および第2モータ184によって駆動させられる駆動機構部186とを含んで構成されている。基体180は、背面板部190と、背面板部190に固着された概してL字状をなす第1支持板部192と、背面板部190と一体的に形成された第2支持板部194とを含んで構成されており、第1支持板部192において、第1モータ182が基体180に固定支持され、第2支持板部194において、第2モータ184および駆動機構部186とが基体180に固定支持されている。
【0062】
駆動機構部186は、第2支持板部192に保持環200を介して固定された第1保持筒202と、第2支持板部192に固定された第2保持筒204とを有している。第1保持筒202と第2保持筒204とは、それぞれが自身のフランジ部206,208において第2支持板部192に固定されており、第1保持筒202の筒部210の上部が第2保持筒204の筒部212に収容される状態で、互いに同軸的に配置されている。第1保持筒202の筒部210の内部には、軸受214を介して第1回転筒216が回転可能かつ軸方向に移動不能に保持され、また、第2保持筒204の筒部212の内部には、軸受218を介して第2回転筒220が回転可能かつ軸方向に移動不能に保持されている。ちなみに、第2回転筒220は、第1保持筒202の筒部210の上部を収容するように配置されている。
【0063】
第1回転筒216の内部には、係合ロッド222が挿通させられている。この係合ロッド222は、後に説明するように、上端部においてワーク10が備えるかさ歯車14のセレーション部22と係合するものであり、第1回転筒216とスプライン嵌合させられており、第1回転筒216に対して回転不能かつ軸方向に移動可能とされている。また、第2回転筒220の上部の内部には、係合筒224が挿通させられている。この係合筒224は、後に説明するように、上端部においてワーク10が備える締付ナット62に係合するものであり、第2回転筒220とスプライン嵌合させられており、第2回転筒220に対して回転不能かつ軸方向に移動可能とされている。ちなみに、係合ロッド222は、それの上部が係合筒224の内部に収容された状態で配置されている。
【0064】
係合ロッド222の上端部付近の外周部には、環状に突出する支持突部226が設けられており、この支持突部226と第1回転筒216の上端面とに両端の各々が支持されるともに係合ロッド222に外嵌する状態で、圧縮コイルスプリング228が配設されている。係合ロッド222の下端部には係止環230が固定されており、係合ロッド222は、その係止環230によって上方への移動が制限されるとともに、スプリング228によって上方に付勢された状態とされている。そのような構成によって、スプリング228の付勢力を超える力が作用した場合において、係合ロッド222の下方への移動が許容されているのである。
【0065】
係合筒224はフランジ部232を有しており、このフランジ部232には、一円周における等配位置に4つのポルト穴が穿設さている。それらボルト穴に緩やかに嵌入する状態で、4つのボルト234が、第2回転筒220が有するフランジ部236の内周側基部に螺合によって立設されている(図では、1つのボルト234のみが示されている)。係合筒224のフランジ部232と第2回転筒220のフランジ部236との間には、それぞれが4つのボルト234の各々に外嵌する状態で、4つの圧縮コイルスプリング238が配設されている。係合筒224は、ボルト234の頭部によって上方への移動が制限されるとともに、スプリング238によって上方に付勢された状態とされている。このような構成によって、スプリング238の付勢力を超える力が作用した場合において、係合筒224の下方への移動が許容されているのである。なお、係合筒224のフランジ部232と第2回転筒220のフランジ部236とのそれぞれには、互いに嵌め合わされた薄肉の円筒部材240,242が固定されており、それら円筒部材240,242は、係合筒224の上下動を許容しつつ駆動機構部186の防塵を担保する防塵カバーとして機能するものとされている。
【0066】
第1回転筒216の下部には、ギヤ244が、第1回転筒216と相対回転不能に嵌められており、このギヤ244は、第1モータ182のモータ軸にそれと相対回転不能に嵌められたギヤ246と噛合させられている。また、第2回転筒220が有するフランジ部236の外周には歯が形成されており、このフランジ部236はギヤとして機能するものとなっており、フランジ部236の外周部は、第2モータ184のモータ軸にそれと相対回転不能に嵌められたギヤ248が噛合させられている。そのような構造により、第1モータ182,第2モータ184の各々を回転させることにより、係合ロッド222,係合筒4の各々を独立して回転させることが可能とされているのである。なお、第1モータ182,第2モータ184は、ともに、減速機付きのサーボモータであって、回転速度を制御可能とされており、係合ロッド222,係合筒224の回転速度は独立して制御可能となっている。
【0067】
係合ロッド222の上端部には、軸方向に凹む凹所が設けられており、その凹所の内部には、ワーク10が備えるかさ歯車14のセレーション部22と係合するセレーション250が設けられている。また、係合筒224の上端部は、いわゆるボックスレンチとして機能するものとなっており、ワーク10が備える締付ナット62と係合する概して六角の係合穴252が設けられている。先に説明したようにワーク10のハウジング12をテーブル104に固定し、係合ロッド222とかさ歯車14のセレーション部22とが係合する状態において第1モータ182を回転させれば、かさ歯車14を回転させることができ、係合筒224と締付ナット62とが係合する状態において第2モータ184を回転させれば、締付ナット62を回転させることができる。詳しく言えば、第1モータ182と第2モータ184との相対回転速度を制御することで、締付ナット62とかさ歯車14との相対回転を生じさせて、ワーク10が備える2つのアンギュラ軸受26,28を締め付けることができるのである。
【0068】
以上のような構造から、本回転装置ユニット112においては、第1モータ182,第1保持筒202,第1回転筒216,係合ロッド222,ギヤ224,ギヤ226等を含んで、第1回転装置であるかさ歯車回転装置108が構成され、第2モータ184,第2保持筒204,第2回転筒220,係合筒224,ギヤ248等を含んで、第2回転装置である締付ナット回転装置110が構成されているのである。
【0069】
先に説明したように、本軸受締付装置100においては、回転装置ユニット112は、装置フレーム102の立設支持板122に設けられた2つのガイドレール126に沿って移動可能な4つのスライドブロック128に取り付けられている。詳しく言えば、回転装置ユニット112を構成する基体180の背面板部190の後方の面において、スライドブロック128に取り付けられている。先に説明した昇降シリンダ130は、それのシリンダロッド上端部が背面板部190の下端の左右方向における中央部を下から支え受けるようにされており、昇降シリンダ130を作動させることで、回転装置ユニット112が昇降させられる構造となっている。先に説明したようにワーク10の搬入およびテーブル104への固定の際には、回転装置ユニット112は下降位置に位置させられており、ワーク10のテーブル104への固定後に、昇降シリンダ130の作動によって、回転装置ユニット112が上昇位置に位置させられ、その状態において、アンギュラ軸受26,28の締付け作業が行われる。なお、回転装置ユニット112が、上昇させられる際、係合ロッド222の回転角度とかさ歯車14との回転角度との不整合によって係合ロッド222に設けられたセレーション250とかさ歯車14のセレーション部22とが嵌合しない場合には、圧縮コイルスプリング228の付勢力に抗して係合ロッド222が押し下げられることになるが、かさ歯車回転装置108によって係合ロッド222が回転させられた際に、係合ロッド222の回転角度とかさ歯車14の回転角度とが整合し、スプリング228の付勢力によって係合ロッド222が押し上げられてセレーション250とセレーション部22とが嵌合する状態となる。また、同様に、係合筒224の回転角度と締付ナット62の回転角度との不整合によって係合筒224に設けられた係合穴252と締付ナット62の外側部とが嵌合しない場合には、圧縮コイルスプリング238の付勢力に抗して係合筒224が押し下げられることになるが、締付ナット回転装置110によって係合筒224が回転させられた際に、係合筒224の回転角度と締付ナット62の回転角度とが整合し、スプリング238の付勢力によって係合筒224が押し上げられて係合穴252と締付ナット62の外側部とが嵌合する状態となる。アンギュラ軸受26,28の締付け作業の終了後、回転装置ユニット112は、昇降シリンダ130の作動によって下降位置に位置させられた状態とされ、その状態において、ワーク10は、テーブル104への固定が解除されて搬出される。
【0070】
以上が、本軸受締付装置100の構成の説明であるが、本軸受締付装置100の構成上の特徴として、回転装置ユニット112が、詳しく言えば、かさ歯車回転装置108と締付ナット回転装置110との両者が、テーブル104と装置フレーム102との間(厳密には、テーブル104とベースフレーム120との間)に配設されていることを挙げることができる。この特徴は、テーブル104が、それぞれが支柱として機能する4つの支持ロッド142によって支持されていることによって実現されたものである。詳しく言えば、手前側の2つの支持ロッド142と奥側の2つの支持ロッド142との間の空間に存在することによって実現されている(奥側の2つの支柱ロッド142の各々は、回転装置ユニット112の基体に設けられた2つの開口260の各々(図10参照、図では一方のみが示されている)を貫通している)。このように、回転装置ユニット112がテーブル104の下方に存在することにより、本軸受締付装置100では、テーブル104の上方の空間には、当該装置の構成要素が存在しないような構造となっている。そのため、ワーク10の搬入,テーブル104の載置,搬出といった作業の作業性が良好なものとなっている。
【0071】
<アンギュラ軸受の締付程度の管理>
先に説明したように、ワーク10が有するアンギュラ軸受26,28を締付ナット62によって締め付ける場合、締付け程度によって、かさ歯車14の回転抵抗が変化する。軸受締付装置100では、その締付け程度を管理するようにされている。
【0072】
ワーク10は、ハウジング12がパレット144を介してテーブル104に固定されることで、テーブル104に載置される。この状態で、かさ歯車回転装置108を作動させてかさ歯車14を回転させれば、図12に示すように、かさ歯車14のハウジング12に対する回転抵抗に応じた大きさ力、つまり、かさ歯車14の軸線である軸線Q回りの回転トルクTqが、テーブル104に作用することになる。本軸受締付装置100では、上述したように、テーブル104は、4つの支持ロッド142によって装置フレーム102に弾性的に支持されており、上記回転抵抗に依拠する力によって、それら4つの支持ロッド142の曲げ変形(撓み)テーブル104が変位させられることになる。なお、後に詳しく説明するが、本軸受締付装置100では、かさ歯車14はかさ歯車回転装置108によって、上方からみて時計まわりに回転させられるため、その方向にテーブルが回転変位することになる。
【0073】
上記テーブル104の変位は、図13に誇張して示すように、概して、上記軸線Qの回りの回転変位として現れることになる。本軸受締付装置10では、この回転変位を測定するために、テーブル104に1対の被測定バー270が設けられるとともに、それら被測定バー270の各々において設定された設定箇所PR,PLの変位量を測定するための設定箇所変位量測定器としての1対の差動トランス272が設けられている。詳しく言えば、被測定バー270の各々は、テーブル104の台板150の下面に、台板150から左右の各々に延び出すように付設されている(図7参照)。設定箇所PR,PLが存在する被測定バー270の各々の奥側の面は軸線Qを含む一面上に位置しており、設定箇所PR,PLは、軸線Qと直交する一直線上に位置するとともに、軸線Qからの距離が互いに等しい位置に位置している。一方、差動トランス272の各々は、装置フレーム102を構成する立設支持板122に付設された1対のブラケット274の各々に、上記一直線に直交する方向に延びる向きに配設されている(図6参照)。差動トランス272の各々の測定子の先端は、設定箇所PR,PLにおいて被測定バー270の各々と当接するようにされており、差動トランス272の各々は、被測定バー270の変位に応じて伸縮し、設定箇所PR,PLの各々の前後方向の変位量、詳しくは、上記軸線Qに直交する面内における前後方向の変位量δR,δLを測定可能とされている。
【0074】
テーブル104の変位は、厳密に言えば、テーブル104に対するワーク10の定置誤差、各支柱ロッド142のテーブル104に対する取付位置誤差、各支柱ロッド142の剛性についての誤差等により、回転変位だけなく、軸線Qに直角な平面内において回転中心が移動するような変位も生じる(図では、軸線Qが軸線Q’に移動するうような変位、つまり、左右方向の変位成分がΔXと、前後方向の変位成分をΔYとなるような変位として表されている)。したがって、そのような変位を除外した回転変位量を測定することによって、テーブル104が受ける回転トルクTqを正確に把握することが可能となる。そのことに考慮して、本軸受締付装置100では、テーブル104の回転変位量を、上記設定箇所PR,PLの各々の前後方向の変位量δR,δLの和である変位量和ΣΔ(=δR+δL)に基づいて推定するようにされている(設定箇所PRの変位量δRは、装置手前側に変位する場合を+とし、逆に、設定箇所PLの変位量δLは、装置奥側に変位する場合を+とする)。変位量和Σδは、差動トランス272の測定子の先端と被測定バー270との左右方向の相対移動が許容されているため左右方向の変位成分ΔXの影響が殆ど除外された値となり、また、前後方向の変位成分ΔYの影響が殆ど相殺された値となる。したがって、変位量和Σδは、テーブル104の軸線Qまわりの回転変位量を正確に推定可能なパラメータであり、言い換えれば、その回転変位量に相当するものとなっており、変位量和Σδに基づけば、テーブル104に作用する回転トルクTqを正確に推定することが可能となるのである。
【0075】
図14に、上記変位量和Σδとテーブル104に作用する回転トルクTqとの関係を示す。この関係は、図15に示すように、所定の錐体280を用いてテーブル104に回転トルクTqを作用させ、その状態において差動トランス272によって測定された設定箇所PR,PLの変位量δR,δLを求め、錐体280の重さを種々に変えて測定を繰り返し、その結果として作成された関係である。ちなみに、本軸受締付装置100では、テーブル104の台板150の上面には、軸線Qを等間隔に挟む位置に1対の掛止ピン282が設けられており(図7参照)、装置フレーム102に脱着可能に取り付けられた1対のローラ284にストリングを巻き掛けるようにして1対の錐体280の各々を掛止ピン282の各々に掛止させることで、テーブル104に回転トルクTqを付与するようにされている。
【0076】
図14から解るように、テーブル104に作用する回転トルクTqは、変位量和Σδに比例するものとなっている。また、図示は省略するが、テーブル104にワーク10のハウジング12を固定した状態でかさ歯車14を回転させたときにテーブル14に作用する回転トルクTqは、ハウジング12に対するかさ歯車14の回転抵抗に比例するものとなることから、その回転抵抗は、かさ歯車14とハウジング12との相対回転速度が一定の場合における変位量和Σδに比例するものとなる。図14には、相対回転速度が一定の場合における変位量和Σδに対するかさ歯車14とハウジング12との相対回転抵抗Rとの関係も併せて示されている。一方、上述したように、2つのアンギュラ軸受26,28の締付け程度によって変わり、また、本軸受締付装置100では、後に説明するように、この変位量和Σδと相対回転抵抗Rとの関係データが、制御盤114内に配設されたコンピュータに記憶されおり、本軸受締付装置100では、上記記憶されている関係データを参照しつつ、上記変位量和Σδに基づいて、すなわち、上記軸線Qまわりのテーブル104の回転変位量に基づいて、それらアンギュラ軸受26,28の締付け程度の管理がなされるようにされているのである。
【0077】
なお、先に説明した錐体280を利用した回転トルクの付与は、本軸受締付装置100の検定に利用できる。つまり、錐体280の重量と変位量和Σδとの正規の関係をデータとして作成しておけば、始業時,定期点検等の際に、所定重さの錐体280を用いてテーブル104に回転トルクを付与し、そのときの変位量和Σδが、設定された範囲内の値となる場合に、当該軸受締付装置100が正当にアンギュラ軸受26,28の締付け程度の管理が可能であると判断することができる。
【0078】
先に説明したように、回転トルクが作用する場合に、テーブル104は変位する。過度の締付け等、予定していない大きさの回転トルクが作用する場合には、テーブル104の変位量が過度に大きくなり、テーブル104を支える支柱142の過度の変形等、当該軸受締付装置100に不具合が生じる場合がある。したがって、そのような過度のテーブル104の変位を防止することが望ましい。そこで、本軸受締付装置100では、固定台変位範囲規制機構としてのテーブル変位範囲規制機構を備え、それによってテーブル104の変位が許容される範囲が規制されている。詳しく言えば、装置フレーム102を構成する立設支持板122に付設された1対のブラケット274の各々には、1対の規制ピン286の各々が立設されており(図6参照)、この1対の規制ピン286の各々が、テーブル104の台板150に設けられた1対のピン挿通穴288(図7参照)の各々に挿通するような構造とされている。各規制ピン286の外径は各ピン挿通穴288の径より適当に小さくされており、ある範囲内でのテーブル104の変位は許容するものの、過度の変位が生じた場合には、少なくとも一方の規制ピン286が、少なくとも一方のピン挿通穴288の周壁面に当接し、それ以上の変位が防止される構造とされているのである。本軸受締付装置100においては、このような構造によって、テーブル変位範囲規制機構が構成されているのである。
【0079】
<制御装置の概要>
本軸受締付装置100の作動は、制御盤114に収容された制御装置によって制御される。制御装置は、コンピュータを主体とするものであり、図16に示すような機能構成をなしている。制御装置300は、第1回転装置であるかさ歯車回転装置108、詳しくは、それが備える第1モータ182の作動を制御するかさ歯車回転装置制御部302を有し、また、第2回転装置であるナット回転装置110、詳しくは、それが備える第2モータ184を制御するナット回転装置制御部304を有しており、それら、かさ歯車装置制御部302およびナット回転装置制御部304とを含んで回転装置制御部306が構成されている。これらかさ歯車回転装置制御部302,ナット回転装置制御部304は、制御盤114内に収容されたそれぞれの駆動回路308,310(インバータである)を介して、かさ歯車回転装置108,ナット回転装置110に接続されている。
【0080】
また、制御装置300は、昇降シリンダ130の作動を制御する昇降シリンダ制御部312を有し、その昇降シリンダ制御部308は、制御盤114内に収容された駆動ユニット(油圧ユニットである)314を介して、昇降シリンダ130に接続されている。さらに、制御装置300は、1対の固定ピン進退シリンダ164の作動を制御する固定ピン進退シリンダ制御部316を有し、その固定ピン進退シリンダ制御部316は、制御盤114内に収容された駆動ユニット318(空気圧弁等を含む構造のもの)を介して、1対の固定ピン進退シリンダ164に接続されている。
【0081】
また、制御装置300は、相対回転抵抗推定部320を有している。相対回転抵抗推定部320は、先に説明したように、それに接続された1対の差動トランス272の各々からの変位量δR,δLについての測定信号に基づいて、変位量和Σδ、すなわち、テーブル104の回転変位量を推定する機能部として、回転変位量推定部321を有しており、その回転変位量推定部321によって推定された変位量和Σδに基づいて、関係データ格納部322に格納されている変位量和−相対回転抵抗関係データを参照しつつ、ワーク10におけるかさ歯車14とハウジング12との相対回転抵抗Rを推定する。また、相対回転抵抗推定部316は、推定された相対回転抵抗Rが、設定されて関係データ格納部316に格納された相対回転抵抗閾値RSを超えているか否かの判断をも行う。
【0082】
なお、固定ピン進退シリンダ制御部316には、起動スイッチ324(図示を省略する)が接続されており、固定ピン進退シリンダ制御部316は、起動スイッチ324のON信号に基づいて、固定ピン進退シリンダ164による固定ピン162の退避動作を開始させる。また、固定ピン進退シリンダ制御部316,昇降シリンダ制御部312,回転装置制御部306は、互いに信号のやり取りを行うようにされており、それらの各々は、それらの他の機能部からの信号に基づいて、かさ歯車回転装置308,ナット回転装置310の動作の開始、昇降シリンダ130による回転装置ユニット112の上昇,下降動作の開始、固定ピン進退シリンダ164による固定ピン162の進出動作の開始等を実行する。
【0083】
<軸受締付装置の作動>
先に説明したように、ワーク10が搬入されてテーブル104に固定された後に、軸受締付装置100が作動させられる。軸受締付装置100は、図17にフローチャートで示す軸受締付装置制御プログラムが、制御装置300の主体をなすコンピュータによって実行されることによって作動が制御される。以下、そのフローチャートに沿って、本軸受締付装置100の作動について説明する。
【0084】
本軸受締付装置制御プログラムは、起動スイッチ324が操作されることによって、実行が開始される。まずステップ1(以下、「S1」と略す、他のステップも同様)において、固定ピン退避シリンダ164が作動させられて、固定ピン162が退避させられる。それによって、1対の固定ピン162は、テーブル104の台板150に設けられた1対のピン穴168から抜き出され、テーブル104の固定の解除、つまり、変位が許容される。続くS2において、昇降シリンダ130が作動させられて、回転装置ユニット112が、設定された上昇位置、つまり、かさ歯車回転装置108の係合ロッド222とかさ歯車14のセレーション部22とが係合し、ナット回転装置110の係合筒224とが係合して、締付ナット62によるアンギュラ軸受26,28の締付け作業が実行可能な位置まで上昇させられる。
【0085】
回転装置ユニット112の上昇後、S3において、かさ歯車回転装置108およびナット回転装置110の作動が開始されて、かさ歯車14および締付ナット62の回転が開始させられる。このときのかさ歯車14の回転方向と締付ナット62の回転方向とは、互いに同方向とされ、その方向は、かさ歯車14が回転しないと仮定した場合に締付ナット62が緩められる方向(上方からみて時計回りの方向)とされている。また、かさ歯車14の回転速度V1は、かさ歯車14とハウジング12との相対回転抵抗を把握するのに適切な一定の回転速度である基準回転速度Vn(例えば、60rpm程度)とされ、それに対して、締付ナット62の回転速度V2は、かさ歯車回転速度V1より第1回転速度差ΔVA(例えば、5〜10rpm程度)だけ小さい速度(Vn−ΔVA)とされている。したがって、締付ナット62とかさ歯車14とは締付ナット62が締め付けられる方向に相対回転し、締付ナット62は、かさ歯車14に対してΔVAの速度で締め付けられることになる。
【0086】
次のS4において、かさ歯車14とハウジング12との相対回転抵抗Rが推定される。この推定は、先に説明したように、差動トランス272によって測定されたテーブル104の2つの設定箇所PR,PLの変位量δR,δLに基づいて行われる。具体的に言えば、それら変位量δR,δLの和である変位量和Σδが演算によって求められ、その求められた変位量和Σδをもってしてテーブル104の軸線Qまわりの回転変位量と推定するとともに、変位量和Σδに相当する相対回転抵抗Rの値が、関係データ格納部322に格納されている変位量和−相対回転抵抗関係データから読み出されることによって、相対回転抵抗Rの推定が行われる。つまり、このS4においては、テーブル104の回転変位量に基づいて、相対回転抵抗Rが推定されることになる。続いて、S5において、推定された相対回転抵抗Rが、設定された第1相対回転抵抗閾値RS1以上であるか否かが判定される。この第1相対回転抵抗閾値RS1は、管理目標とされた締付け程度において有すべき相対回転抵抗値(後に説明する第2相対回転抵抗閾値RS2である)にある程度近づいたと判断できる値に設定されている(図14参照)。S4の推定処理,S5の判定処理は、相対回転抵抗Rが第1相対回転抵抗閾値RS1に達するまで、極短い時間間隔(例えば、数msec)で繰り返し実行される。S5において相対回転抵抗Rが第1相対回転抵抗閾値RS1に達したと判定された場合には、次のS6が実行される。
【0087】
S6では、締付ナット62に回転速度である締付ナット回転速度V2が増加させられる。具体的には、上記第1回転速度差ΔVAより小さい値に設定されている第2回転速度差ΔVB(例えば、1〜2rpm程度)に基づいて、締付ナット回転速度V2が、回転速度(Vn−ΔVB)に増加させられる。これによって、締付ナット62とかさ歯車14の相対回転速度が減少させられ、締付ナット62は、それまでより遅い速度であるΔVBの速度で締付けられることになる。この締付け速度の減少は、過度の締付けを防止するとともに、締付け程度を正確に管理するために行われる。
【0088】
続くS7において、締付け速度が減少させられている状態において、先のS4と同様の処理によって、かさ歯車14とハウジング12との相対回転抵抗Rが推定され、S8において、先のS5の処理と同様の処理によって、相対回転抵抗Rが、管理目標として設定された第2相対回転抵抗閾値RS2以上であるか否かが判定される。これら、S7およびS8の処理は、S4,S5と同様に、相対回転抵抗Rが第2相対回転抵抗閾値RS2に達するまで、極短い時間間隔で繰り返し実行される。S8において相対回転抵抗Rが第2相対回転抵抗閾値RS2に達したと判定された場合には、次のS9において、かさ歯車回転装置108およびナット回転装置110の作動が停止させられる。それにより、かさ歯車14および締付ナット62の両者の回転が停止させられ、つまり、かさ歯車14とハウジング12との相対回転速度が0とされ、締付ナット62によるアンギュラ軸受26,28の締付けが、目標となる締付け程度となる状態で完了する。
【0089】
締付けが完了した後、次のS10において、昇降シリンダ130が作動させられて、回転装置ユニット112が、初期位置にまで下降させられ、さらに、続くS11において、固定ピン退避シリンダ164が作動させられて、固定ピン162が進出させられ、それによって、1対の固定ピン162は、テーブル104の台板150に設けられた1対のピン穴168に嵌入されて、テーブル104が変位を禁止する状態に固定される。以上説明したような一連の処理が実行されて、1つのワーク10に対する締付け作業が完了する。締付け作業が完了したワーク10は、テーブル104に対する固定が解除されて、パレット144ごと本軸受締付装置100から搬出される。
【0090】
上記締付け作業における各ステップの処理と前述の制御装置300の各機能部との関係について言及すれば、制御装置300は、S1およびS11の処理を実行する部分を含んで固定ピン進退シリンダ制御部316が、S2およびS10の処理を実行する部分を含んで昇降シリンダ制御部312が、S3およびS9におけるかさ歯車回転装置108の動作に関する処理を実行する部分を含んでかさ歯車回転装置制御部302が、S3およびS9におけるナット回転装置110の動作に関する処理を実行する部分並びにS6の処理を実行する部分を含んでナット回転装置制御部304が、S4,S5,S7およびS8の処理を実行する部分を含んで相対回転抵抗推定部320が、それぞれ構成されたものとなっている。
【0091】
また、本軸受締付装置100では、上記S4およびS7において、差動トランス272による測定結果に基づいて、変位量和Σδが求められる。先に説明したように、この変位量和Σδを求めて、テーブル104の回転変位量を推定する処理を行う部分が、回転変位量推定部321を構成するものとされており、本軸受締付装置100においては、差動トランス272と、その回転変位量推定部321とを含んで、固定台変位量検出装置が構成されることになる。さらに、S4およびS7において上記相対回転抵抗Rを推定する処理は、その固定台変位量検出装置の検出結果に基づく推定処理であり、また、S6およびS9における回転装置制御部306による処理、つまり、かさ歯車回転装置108とナット回転装置110との少なくとも一方を制御することでかさ歯車14とハウジング12との相対回転速度を制御する処理も、固定台変位量検出装置の検出結果に基づく推定処理となっている。したがって、制御装置300は、検出結果依拠処理実行装置として機能するものとなっているのである。
【0092】
なお、本軸受締付装置100では、先に説明したように、かさ歯車14および締付ナット62の回転方向は、かさ歯車14が回転しないと仮定した場合に締付ナット62が緩められる方向とされているが、逆回転方向(上方からみて反時計回りの方向)に回転させることによって締付けを実行することも可能である。その場合は、例えば、かさ歯車回転速度V1を基準回転速度Vnとし、締付ナット回転速度V2を、基準回転速度Vnより第1回転速度差ΔVAあるいは第2回転速度差ΔVBだけ大きな速度で回転させるようにすればよい。ちなみに、その場合は、テーブル104も逆方向に回転変位させられることななるため、変位量δR,δLおよび変位量和Σδの符号の扱いも逆になる。また、かさ歯車14とハウジング12との相対回転速度を変更は、ナット回転装置110の作動を制御することによって行うのではなく、かさ歯車回転装置108の作動を制御することによっておこなってもよい。
【0093】
<変形例>
以下に、変形例としての軸受締付装置を、それの作業対象となるワークを説明した上で、簡単に説明する。
【0094】
変形例の軸受締付装置の作業対象となるワーク350は、図18に断面を示す構造をなすものであり、軸保持体としての軸保持筒352と、軸保持筒12に回転可能に保持される軸体としての軸部材354とを含んで構成される組立体である。軸保持体352は、概して円筒形状をなし、軸部材354は、軸保持体352の内周面に配設された2つのアンギュラ円すいころ軸受356,358(以下、単に、「アンギュラ軸受356,358」という場合がある)を介して回転可能に保持されている。それら2つのアンギュラ軸受356,358は、先の実施例におけるワーク10のものと同様、それぞれ、アウターレース360,362と、インナレース364,366と、リテーナによって保持されてアウタレース360,362とインナレース364,366との間に介装された転動体としての複数の円すいころ370,372とを含んで構成されている。
【0095】
軸部材354は、軸部380の中間部に大径部382を有しており、この大径部382おり、2つのアンギュラ軸受356,358は、それらのインナレース364,366を挟むように配設されている。この大径部382は、各インナレース364,366の相互接近を禁止する接近禁止部として機能するものとなっている。また、軸保持筒352の図における上端部は、内側に環状に突出する係止環部384とされており、上方に位置するアンギュラ軸受356は、アウタレース360にが係止環部364によって上端が係止されることで、上方への移動が禁止されている。2つのアンギュラ軸受356,358のアウタレース360,362の間には、先の実施例のワーク10のものと同様のスペーサ386が介装されている。軸保持筒352の下端部の内面には雌ねじ390が形成されており、この雌ねじ390に外周部に雄ねじが形成された軸受締付部材としての締付リング392が螺合しており、この締付リング392は、下方に位置するアンギュラ軸受358のアウタレース362の下面に当接する状態とされており、締付リング392を回転させることによって、2つのアンギュラ軸受356,358が締付けられる。なお、締付リング392の下面には、締付け際に、後に説明するリング回転装置との係合のための係合溝394が設けられている。係合溝394は、周方向における4等配の位置のそれぞれにおいて、径方向に延びるように形成されている。
【0096】
軸部材354の上端部はフランジ部396とされており、後に説明するように、ワーク350は、このフランジ部396において、軸受締付装置の固定台に固定される。また、軸保持筒352の下端部は矩形をなす角フランジ部398とされており、後に説明するように、この角フランジ部398において、軸保持筒回転装置と係合させられる。本ワーク350においても、先に説明したワーク10と同様、アンギュラ軸受356,368の締付け程度によって軸部材354と軸保持筒352との相対回転抵抗が変化することになる。
【0097】
要部を図19に示す本変形例の軸受締付装置400は、先に示す軸受締付装置と同様、装置本体としての装置フレームと、ワークを固定する固定台としての固定円盤402と、回転装置ユニット404、制御盤等を含んで構成される。図には、装置フレームの一部,固定円盤402,回転装置ユニット404等のみが表されている。
【0098】
固定円盤402は、水平に配設されており、下面において、ワーク350が、詳しくは、それが備える軸部材354のフランジ部396が、図示を省略する固定機構によって脱着可能に固定される。ワーク350が固定された状態において、軸部材354は、固定円盤402の中央において、それの軸線が垂直つまり固定円盤402と直角となるように位置させられることになる。固定円盤402は、装置フレームの一部をなす2つの垂下柱406に、固定台支持機構を構成する支持部材としての1対の支持板408によって支持されている。それら1対の支持板408の各々は、概して三角形をなして僅かに湾曲する比較的薄いものとされており、垂直に配設され、それの1辺が垂下柱406に固着されるとともに、その1辺と向かい合う頂部が固定円盤402に固着されている。そのような構造から、支持板408は、固定円盤402およびそれに固定されるワーク350の重量をしっかりと支え受けるとともに、後に説明するように、固定円盤402に軸部材354の軸線回りの力が作用する場合に、容易に曲げ弾性変形するものなっている。つまり、本軸受締付装置400においても、支持板408は、固定円盤402を、摩擦抵抗を受けない状態での軸部材354の軸線と直角な平面内における任意の方向へのある範囲における変位を許容しつつ弾性的に支持するものとされているのである。
【0099】
回転装置ユニット404の構造は、先に説明した回転装置ユニット112と略同様の構造となっている。ただし、先の回転装置ユニット112におけるかさ歯車回転装置108が、本回転装置ユニット404における第2回転装置としての締付リング回転装置412とされており、ナット回転装置110が、第1回転装置としての軸保持筒回転装置414とされている。そのため、軸保持筒回転装置414が有する係合外筒416は、軸保持筒352の角フランジ部398と嵌合する矩形嵌合穴を有しており、また、締付リング回転装置412が有する係合内筒418は、係合外筒416内に収容されるように配置され、締付リング392の係合溝394と嵌合する嵌合突起が設けられている。具体的な構造の詳細については、先の回転装置ユニット112と略同様であるため、ここでの説明は省略する。また、本回転装置ユニット404も、先の回転装置ユニット112の場合と同様に、昇降シリンダによって昇降させられる。
【0100】
本軸受締付装置400におけるアンギュラ軸受356,358の締付け程度の管理についても先の軸受締付装置100の場合と同様の考え方に沿って行われるため、ここでの説明は省略する。ただし、固定円盤402の変位量の測定は、差動トランスによらず、撮像デバイスである1対のCCDカメラ420を利用して行われる。固定円盤402の外周面には、中心を挟んだ2箇所の位置の各々に、基準マーク422が設けられている。この2つの基準マーク422が設けられている箇所の各々が設定箇所とされており、本軸受締付装置400では、基準マーク422を撮像した画像について画像処理を行うことによってそれら基準マーク422の各々の変位を認識することで、それら設定箇所の各々の変位量を測定するようにされている。
【0101】
本軸受締付装置400が備える制御装置の構成も、先の軸受締付装置100のものと同様であり、また、本軸受締付装置400の作動についても、先の軸受締付装置100と同様であるため、ここでの説明は省略する。
【0102】
本変形例の軸受締付装置400と、先に説明した実施例の軸受締付装置100とを併せて考えれば、本発明に従う軸受締付装置は、軸保持体を固定して軸体を回転させるような構成の装置であってもよく、軸体を固定して軸保持体を回転させるような構成の装置であってもよいことがわかる。また、軸受締付装置が備える固定台は、狭い意味での台に限定されるものではないことが理解できる。さらに、固定台支持機構も、支持部材として支柱を有するものに限定されず、固定台を摩擦抵抗を受けない状態での軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する種々の機構が採用可能であることがわかる。さらにまた、固定台変位量検出装置の具体的な構成も特に限定されるものではなく、種々の設定箇所変位量測定器を採用可能であることが容易に理解できる。繰り返すが、本発明の軸受締付装置は、上記実施例の装置に決して限定されるものではなく、前述の〔発明の態様〕の項に記載された態様を始めとして、当業者の知識に基づいて種々の変更、改良を施した種々の態様で実施することができるのである。
【図面の簡単な説明】
【0103】
【図1】実施例の軸受締付装置の作業対象となるワークを示す正面図である。
【図2】図1に示すワークの側面断面図である。
【図3】図1に示すワークの側面断面における分解図である。
【図4】実施例の軸受締付装置を示す全体斜視図である。
【図5】図4に示す軸受締付装置の分解斜視図である。
【図6】軸受締付装置を構成する装置フレームの要部を示す部分斜視図である。
【図7】軸受締付装置を構成するテーブルユニットを示す斜視図である。
【図8】テーブルユニットが備えるテーブルへのワークの搬入の様子を示す斜視図である。
【図9】ワークがテーブルに定置させられた状態を示す斜視図である。
【図10】軸受締付装置を構成する回転装置ユニットを示す斜視図である。
【図11】図10に示す回転装置ユニットの断面図である。
【図12】軸受締付装置を作動させた際にワークのハウジングに対するかさ歯車の回転抵抗に依拠して生じるテーブルの変位の様子を示す斜視図である。
【図13】図12に示すテーブルの変位を誇張して表す平面図である。
【図14】テーブルの変位量と、テーブルに作用する回転トルクおよびかさ歯車とハウジングとの相対回転抵抗との関係を示すグラフである。
【図15】錐体を用いてテーブルに回転トルクを作用させる様子を示す斜視図である。
【図16】軸受締付装置の制御を司る制御装置の要部を示す機能ブロック図である。
【図17】軸受締付装置の作動を制御するための軸受締付装置制御プログラムを示すフローチャートである。
【図18】変形例の軸受締付装置の作業対象となるワークを示す断面図である。
【図19】変形例の軸受締付装置の要部を示す斜視図である。
【符号の説明】
【0104】
10:ワーク(組立体) 12:ハウジング(軸保持体) 14:かさ歯車(軸体) 26,28:アンギュラ円すいころ軸受(転がり軸受,アンギュラ転がり軸受) 30,32:アウタレース 34,36:インナレース 54:接近禁止部 60:雄ねじ部 62:締付ナット(軸受締付部材,ナット部材) 100:軸受締付装置 102:装置フレーム(装置本体) 104:テーブル(固定台) 108:かさ歯車回転装置(第1回転装置) 110:締付ナット回転装置(第2回転装置) 142:支持ロッド(固定台支持機構,支持部材,支柱) 162:固定ピン(固定台変位禁止機構) 270:被測定バー(設定箇所) 272:差動トランス(設定箇所変位量測定器) 286:規制ピン(固体台変位範囲規制機構) 300:制御装置 302:かさ歯車回転装置制御部 304:ナット回転装置制御部 306:回転装置制御部 320:相対回転抵抗推定部 321:回転変位量推定部 350:ワーク(組立体) 352:軸保持筒(軸保持体) 354:軸部材(軸体) 356,358:アンギュラ円すいころ軸受(転がり軸受,アンギュラ転がり軸受) 360,362:アウタレース 364,366:インナレース 382:大径部(接近禁止部) 390:雌ねじ 392:締付リング(軸受締付部材) 400:軸受締付装置 402:固定円盤(固定台) 408:支持板(固定台支持機構,支持部材) 412:リング締付装置(第2回転装置) 414:軸保持筒回転装置(第1回転装置) 420:CCDカメラ(設定箇所変位量測定器) 422:基準マーク(設定箇所)
【特許請求の範囲】
【請求項1】
(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、
装置本体と、
前記軸体と前記軸保持体との他方が固定される固定台と、
前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、
前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、
前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、
前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、
前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置と
を備えた軸受締付装置。
【請求項2】
当該軸受締付装置が、
前記第1回転装置と第2回転装置とを同時期に作動させることで、前記軸体と軸保持体との一方と前記軸受締付部材とを相対回転させ、その相対回転によって前記2つ転がり軸受の締め付けを実行する構成とされた請求項1に記載の軸受締付装置。
【請求項3】
前記検出結果依拠処理実行装置が、前記固定台変位量検出器による検出結果に基づいて、前記第1回転装置と前記第2回転装置との少なくとも一方の作動を制御して、前記軸体と軸保持体との一方と前記軸受締付部材との相対回転速度を制御する回転装置制御部を有する請求項2に記載の軸受締付装置。
【請求項4】
前記検出結果依拠処理実行装置が、前記固定台変位量検出装置による検出結果に基づいて、前記軸体と前記軸保持体との相対回転に対する抵抗を推定する相対回転抵抗推定部を有する請求項1ないし請求項3のいずれかに記載の軸受締付装置。
【請求項5】
前記固定台変位量検出装置が、
それぞれが、前記固定台の前記軸体の軸線と直角な平面内において互いに離間して設定された複数の箇所の各々の設定方向における変位量を測定する複数の設定箇所変位量測定器と、
それら複数の設定箇所変位量測定器の測定結果に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定する回転変位量推定部と
を含んで構成された請求項1ないし請求項5のいずれかに記載の軸受締付装置。
【請求項6】
前記固定台支持機構が、
それぞれが、一端部において前記装置本体に固定されるとともに他端部において前記固定台に固定され、弾性変形可能な複数の支持部材を含んで構成された請求項1ないし請求項5のいずれかに記載の軸受締付装置。
【請求項1】
(a)軸体と、(b)その軸体を保持する軸保持体と、(c)それら軸体と軸保持体との間に互いに同軸的にかつ互いに離間して配設され、軸線方向の荷重を受ける状態で前記軸体と前記軸保持体とを相対回転可能に結合する2つの転がり軸受と、(d)前記軸体と前記軸保持体との一方に設けられたねじと螺合するねじを有して自身が回転させられることで前記2つの転がり軸受を軸線方向に締め付ける軸受締付部材とを含んで構成される組立体に対して、前記2つの転がり軸受の締め付けを実行するための軸受締付装置であって、
装置本体と、
前記軸体と前記軸保持体との他方が固定される固定台と、
前記装置本体に設けられ、その固定台を、摩擦抵抗を受けない状態での前記軸体の軸線と直角な平面内における任意の方向への変位を許容しつつ弾性的に支持する固定台支持機構と、
前記装置本体に設けられ、前記軸体と軸保持体との一方を回転させる第1回転装置と、
前記装置本体に設けられ、前記軸受締付部材を回転させる第2回転装置と、
前記軸体と前記軸保持体との相対回転に起因する前記固定台の前記軸体の軸線まわりの回転変位量を検出する固定台変位量検出装置と、
前記固定台変位量検出装置による検出結果に基づく処理を実行する検出結果依拠処理実行装置と
を備えた軸受締付装置。
【請求項2】
当該軸受締付装置が、
前記第1回転装置と第2回転装置とを同時期に作動させることで、前記軸体と軸保持体との一方と前記軸受締付部材とを相対回転させ、その相対回転によって前記2つ転がり軸受の締め付けを実行する構成とされた請求項1に記載の軸受締付装置。
【請求項3】
前記検出結果依拠処理実行装置が、前記固定台変位量検出器による検出結果に基づいて、前記第1回転装置と前記第2回転装置との少なくとも一方の作動を制御して、前記軸体と軸保持体との一方と前記軸受締付部材との相対回転速度を制御する回転装置制御部を有する請求項2に記載の軸受締付装置。
【請求項4】
前記検出結果依拠処理実行装置が、前記固定台変位量検出装置による検出結果に基づいて、前記軸体と前記軸保持体との相対回転に対する抵抗を推定する相対回転抵抗推定部を有する請求項1ないし請求項3のいずれかに記載の軸受締付装置。
【請求項5】
前記固定台変位量検出装置が、
それぞれが、前記固定台の前記軸体の軸線と直角な平面内において互いに離間して設定された複数の箇所の各々の設定方向における変位量を測定する複数の設定箇所変位量測定器と、
それら複数の設定箇所変位量測定器の測定結果に基づいて、前記固定台の前記軸体の軸線まわりの回転変位量を推定する回転変位量推定部と
を含んで構成された請求項1ないし請求項5のいずれかに記載の軸受締付装置。
【請求項6】
前記固定台支持機構が、
それぞれが、一端部において前記装置本体に固定されるとともに他端部において前記固定台に固定され、弾性変形可能な複数の支持部材を含んで構成された請求項1ないし請求項5のいずれかに記載の軸受締付装置。
【図1】


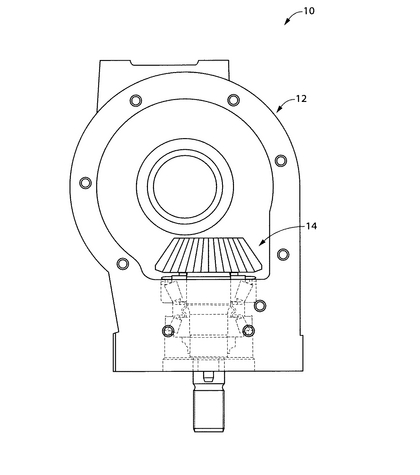
【図2】
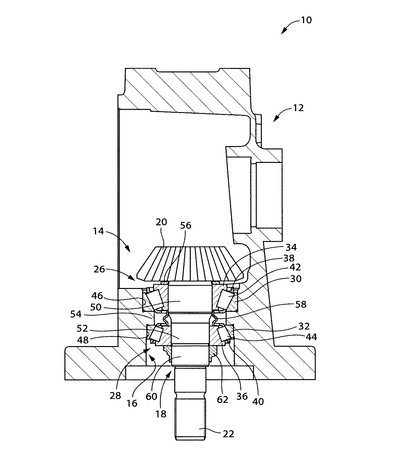
【図3】
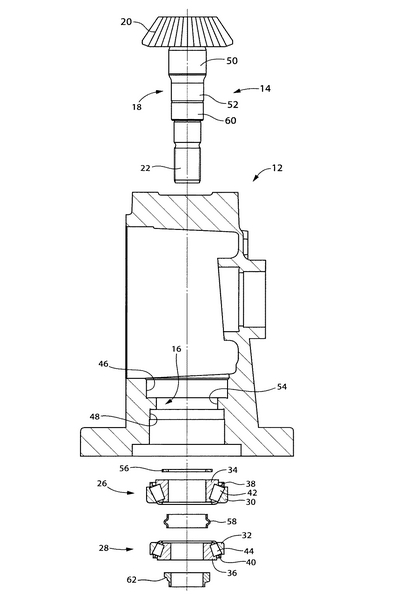
【図4】
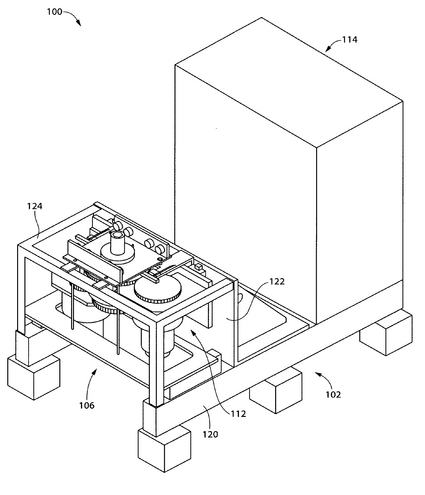
【図5】
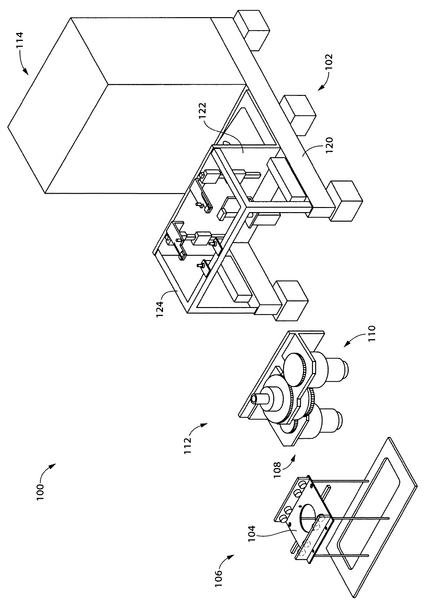
【図6】
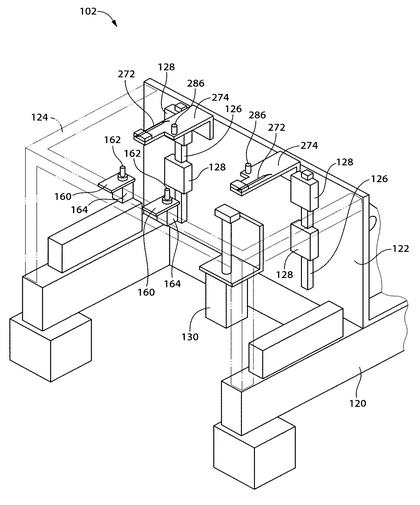
【図7】
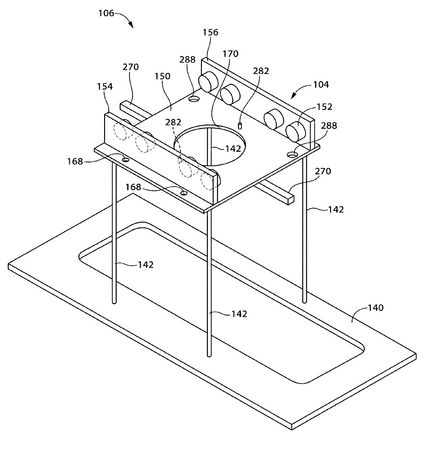
【図8】
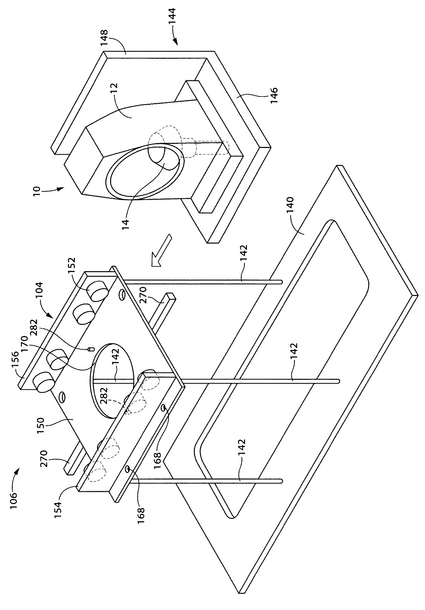
【図9】
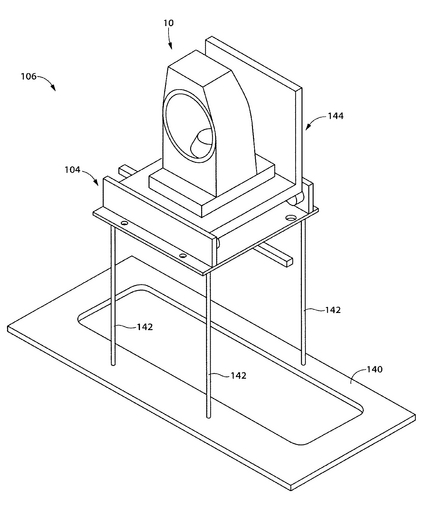
【図10】
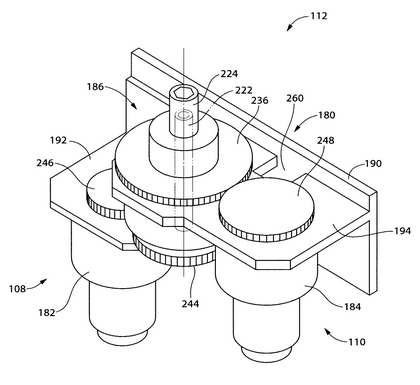
【図11】
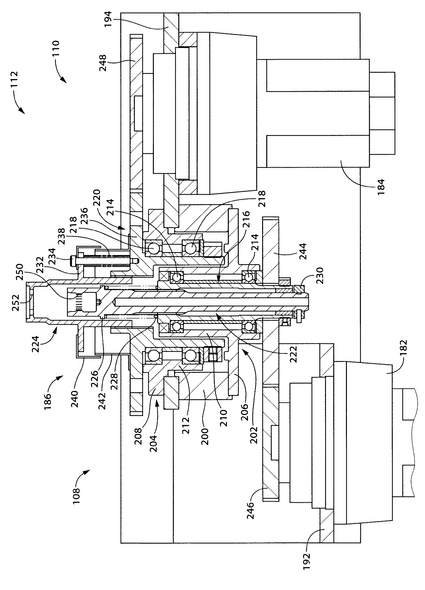
【図12】
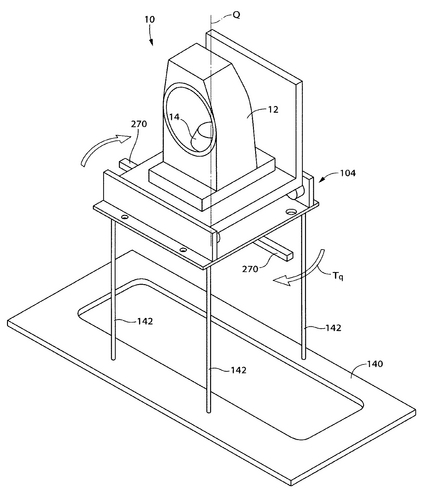
【図13】
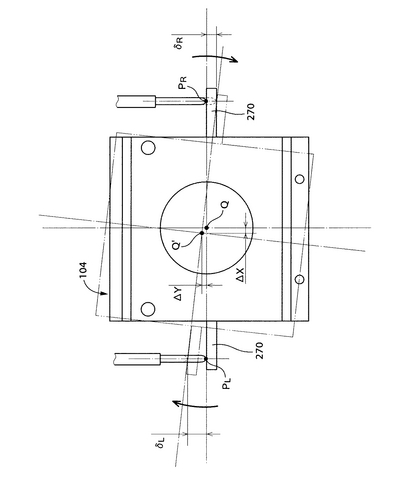
【図14】
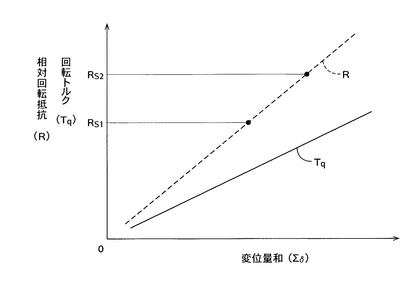
【図15】
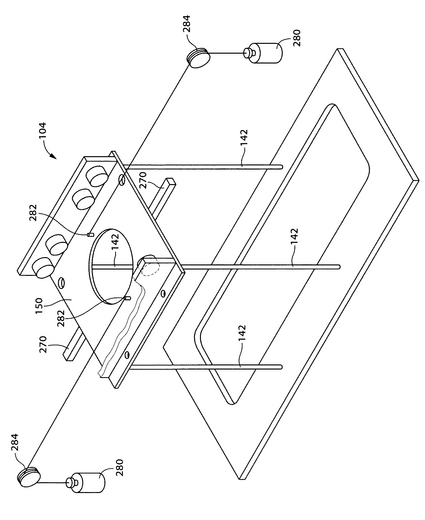
【図16】
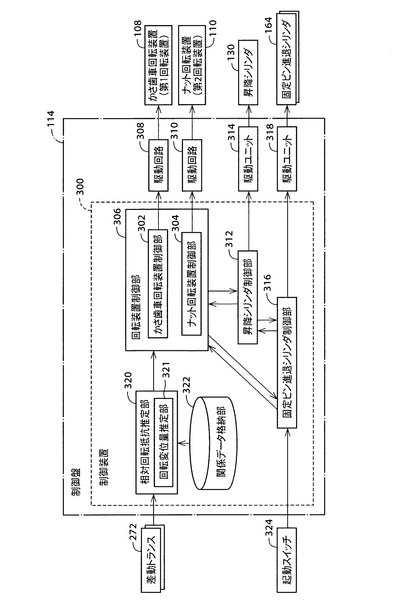
【図17】
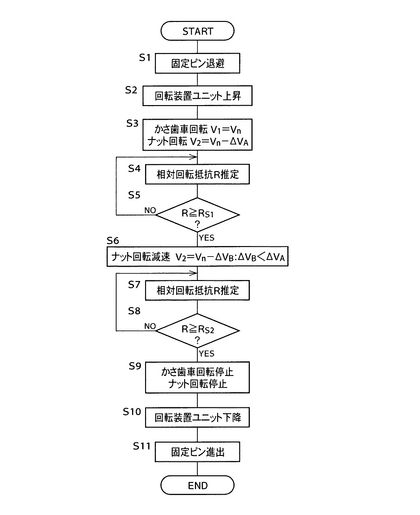
【図18】
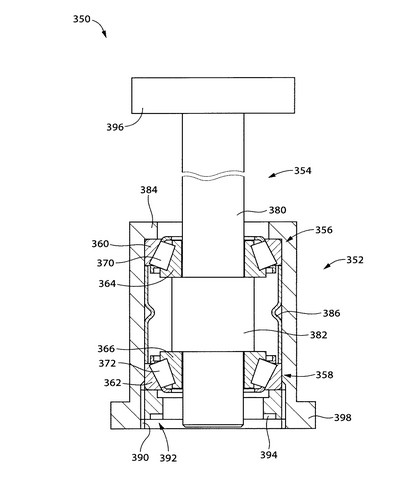
【図19】
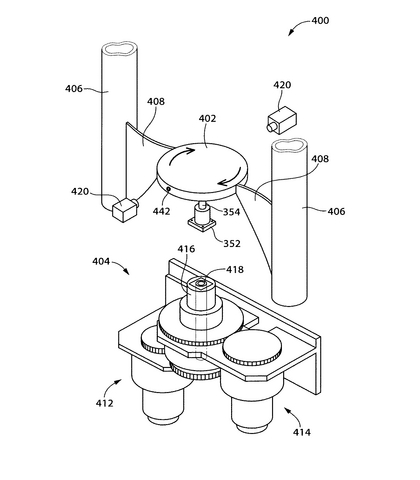
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2006−322470(P2006−322470A)
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願番号】特願2005−143534(P2005−143534)
【出願日】平成17年5月17日(2005.5.17)
【出願人】(591092615)豊精密工業株式会社 (6)
【Fターム(参考)】
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願日】平成17年5月17日(2005.5.17)
【出願人】(591092615)豊精密工業株式会社 (6)
【Fターム(参考)】
[ Back to top ]