
軸外ばねシステムを有する慣性センサ
【課題】慣性センサを提供する。
【解決手段】慣性センサ(20)は、振動運動を受けるように構成された駆動質量(30)と、駆動質量(30)に連結された感知質量(32)とを含む。軸上トーションばね(58)は、感知質量(32)に結合され、当該軸上トーションばね(58)は回転軸(22)と同一ロケーションに配置されている。慣性センサ(20)は、軸外ばねシステム(60)をさらに含む。軸外ばねシステム(60)は、軸外ばね(68、70、72、74)を含み、その各々は、感知質量(32)上の回転軸(22)からずれたロケーションにおいて感知質量(32)に結合された接続接合部分(76)を有する。合わせて、軸上トーションばね(58)および軸外ばねシステム(60)は、感知質量(32)が、駆動質量(30)の駆動周波数に実質的に一致する感知周波数において回転軸(22)を中心として平面外で振動することを可能にする。
【解決手段】慣性センサ(20)は、振動運動を受けるように構成された駆動質量(30)と、駆動質量(30)に連結された感知質量(32)とを含む。軸上トーションばね(58)は、感知質量(32)に結合され、当該軸上トーションばね(58)は回転軸(22)と同一ロケーションに配置されている。慣性センサ(20)は、軸外ばねシステム(60)をさらに含む。軸外ばねシステム(60)は、軸外ばね(68、70、72、74)を含み、その各々は、感知質量(32)上の回転軸(22)からずれたロケーションにおいて感知質量(32)に結合された接続接合部分(76)を有する。合わせて、軸上トーションばね(58)および軸外ばねシステム(60)は、感知質量(32)が、駆動質量(30)の駆動周波数に実質的に一致する感知周波数において回転軸(22)を中心として平面外で振動することを可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的には微小電気機械システム(MEMS)デバイスに関する。より詳細には、本発明は、駆動周波数と感知周波数との間の整合性が向上したMEMS慣性センサに関する。
【背景技術】
【0002】
微小電気機械システム(MEMS)技術は、非常に小さな機械構造を作成し、従来のバッチ半導体処理技法を使用して単一の基板上で電気デバイスとこれらの構造を取り入れる方法を提供するため、近年において広く高い評判を勝ち得ている。MEMSの1つの一般的な用途が、センサデバイスの設計および製造である。微小電気機械システム(MEMS)センサデバイスは、自動車、慣性誘導システム、家庭電化製品、ゲームデバイス、さまざまなデバイスのための保護システム、ならびに、多くの他の産業、科学、および工学システムのような用途に広く使用されている。
【0003】
1つまたは複数の軸を中心とする角速度または角加速度を感知するMEMS角度慣性センサが実装される場合がある。代替的に「ジャイロスコープ」、「角速度センサ」、「ジャイロメータ」、「ジャイロスコープセンサ」、または「ヨー・レート・センサ」と称されるMEMSジャイロセンサは、1つまたは複数の軸を中心とする角速度または運動速度を感知する慣性センサである。「x軸」ジャイロと称される1つのこのようなセンサは、コリオリの加速度成分の影響による、ジャイロ基板に平行な軸を中心とする角回転を検知するように構成される。角加速度計は、角速度の変化率を測定する加速度計である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第6892575号明細書
【特許文献2】米国特許第7434464号明細書
【特許文献3】米国特許第6915693号明細書
【特許文献4】米国特許第6921952号明細書
【特許文献5】米国特許出願公開第2009/0064780号明細書
【特許文献6】米国特許出願公開第2010/0236327号明細書
【非特許文献】
【0005】
【非特許文献1】ツァイ(TSAI)他、「二軸感知式減結合振動型ホイール・ジャイロスコープの設計とシミュレーション(Design and Simulation of a Dual−Axis Sensing Decoupled Vibratory Wheel Gyroscope)」、Sensors and Acutators A:Physical,Vol.126,Issue 1,2006年1月26日,33−40頁,www.sciencedirect.com
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の第1の側面によれば、慣性センサであって、表面を有する基板と、前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量と、前記駆動質量に連結された感知質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量上の、前記回転軸からずれたロケーションにおいて、前記感知質量に結合された接続接合部分を有する軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が前記平面外で振動することを可能にする、慣性センサが提供される。
【0007】
本発明の第2の側面によれば、慣性センサであって、表面を有する基板と、回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を有する感知質量であって、該感知質量は中央開口を含む、前記感知質量と、前記感知質量に連結されるとともに前記中央開口内に存在する駆動質量であって、該駆動質量は、前記表面に実質的に平行な平面内で振動運動を受けるように構成されている、前記駆動質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量の前記第1の外側端部に配置された第1の軸外ばね、および、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねを含む軸外ばねシステムであって、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を含む、前記軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記回転軸を中心として前記平面外で回転することを可能にする、慣性センサが提供される。
【0008】
本発明の第3の側面によれば、慣性センサであって、表面を有する基板と、駆動周波数において前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量であって、該駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、該第1の駆動質量構造および該第2の駆動質量構造は、回転軸に対する鏡映対称性を呈し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記平面に平行な対向する二つの方向において駆動される、前記駆動質量と、前記駆動質量に連結された感知質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を有する軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前期感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記平面外で振動することを可能にする、慣性センサが提供される。
【図面の簡単な説明】
【0009】
【図1】一実施形態によるジャイロセンサの上面図を示す。
【図2】図1のジャイロセンサの側面概念図を示す。
【図3】代替的な実施形態によるジャイロセンサの上面図を示す。
【図4】代替的な実施形態による二軸ジャイロセンサの上面図を示す。
【図5】さらに別の代替的な実施形態による二軸ジャイロセンサの上面図を示す。
【発明を実施するための形態】
【0010】
図面と併せて考察して詳細な説明および請求項を参照することで、より完全に本発明を理解することができる。これらの図面では全般にわたり同様の参照符号は類似の項目を示している。
【0011】
本明細書において開示される実施形態によって、例えば、1つまたは複数のシーソー型感知質量(sense mass)を有するジャイロセンサおよび角加速度計センサの形態の微小電気機械システム(MEMS)慣性センサデバイスがもたらされる。例示的な実施形態では、ジャイロセンサは、コリオリの加速度成分の影響による、ジャイロセンサの基板に平行な軸を中心とする角回転速度を感知するように構成されることができる。ジャイロセンサは、軸上トーションばね、およびシーソー感知質量に結合される軸外ばねシステムの両方を含む。軸上トーションばねは回転軸に沿って配置され、軸外ばねシステムは、回転軸からずれた1つまたは複数のロケーションにおいて感知質量に結合される。軸外ばねシステムは回転軸において、ジャイロセンサの駆動周波数と感知周波数との間の整合性の向上を達成するのに十分なねじり剛性を提供する。
【0012】
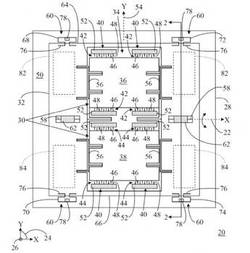
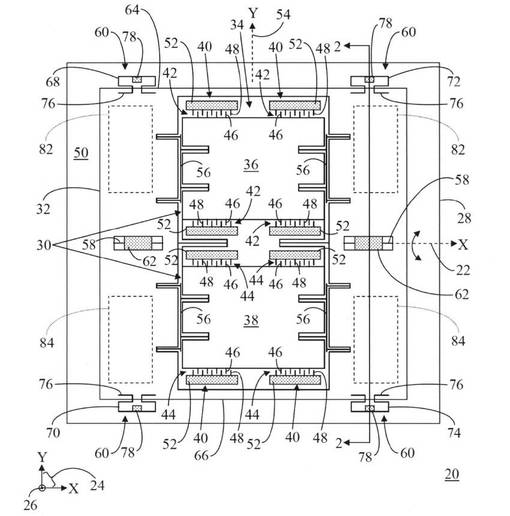
図1および図2を参照すると、図1は一実施形態による慣性センサ20の上面図を示しており、図2は慣性センサ20の側面概念図を示している。慣性センサ20は一般的に、回転軸22、すなわち三次元座標系におけるX軸を中心とする角速度を感知するように構成される。従って、慣性センサ20はここではジャイロセンサ20と称される。慣例により、ジャイロセンサ20は、X−Y平面24内の全体的に平坦な構造を有するものとして示されており、図1内のX−Y平面24に対して垂直なZ軸26が紙面の外に延在しており、図2に示される場合には、Z軸26は上下に延在している。
【0013】
ジャイロセンサ20は、基板28と、駆動質量(drive mass)30と、感知質量32と、下記に詳細に記載されるさまざまな機械的連結機構とを含む。図1および図2の具体的な実施形態では、駆動質量30は感知質量32を貫通して延在する中央開口34内に存在している。駆動質量30は、駆動質量構造36、および、X−Y平面24内で駆動構造36に対し側方に配置されたもう一つの駆動質量構造38を含む。駆動質量構造36および38は回転軸22を中心として互いに対して対称に配置されている。
【0014】
中央開口34内に駆動システム40が存在し、駆動システム40は、駆動質量構造36および38の各々と動作可能に通信する。より具体的には、駆動システム40は、駆動構造36を振動させるように構成される駆動素子のセット42、および、駆動構造38を振動させるように構成される駆動素子の別のセット44を含む。駆動素子の各セット42および44は、櫛歯46および48として参照される電極の対を含む。一実施形態では、櫛歯46は、駆動質量構造36および38の各々に結合され、その周縁から延在する。櫛歯48は、アンカー52を介して基板28の表面50に固定される。櫛歯48は、櫛歯46から離間され、互い違いの配列で配置されている。櫛歯46は、駆動質量構造36および38に取り付けられているため、駆動質量構造36および38とともに運動可能である。逆に、櫛歯48は、基板28に固定されて取り付けられているため、櫛歯46に対して動かない。従って、櫛歯46はここでは可動櫛歯46と称され、櫛歯48はここでは固定櫛歯48と称される。図を簡潔にするため、少数の可動櫛歯46および固定櫛歯48しか示されていない。櫛歯の量および構造は設計要件に応じて変化することを当業者は容易に認識するはずである。
【0015】
いくつかの実施形態では、固定櫛歯48の全長が基板28の表面50に取り付けられてもよい。代替的な実施形態では、固定櫛歯48の各々がアンカー52によって表される単一のロケーションにおいて基板28の表面50に固定されてもよく、固定櫛歯48の各々の残りの部分は表面28の上に懸垂されて(suspended)いる。この第2の手法は、いくつかの実施形態において、利用領域においてより高い効率を達成するのに、および、パッケージ応力に対する影響の受けやすさを低減するのに望ましい可能性がある。
【0016】
以下の図面の説明全体を通じての一貫性のために、ジャイロセンサ20の要素を、基板28の下層の表面50に接続するアンカー52のような任意の固定構造は点描のパターンで示されている。逆に、固定構造でない任意の要素はこの点描のパターンを含まず、それゆえ基板28の表面50の上に懸垂されている。
【0017】
駆動質量構造36および38は、X−Y平面24内で振動運動を受けるように構成される。一般的に、駆動質量構造36および38を、Y軸54に沿って線形に振動させるように、交流電流(AC)電圧が、駆動回路(図示せず)を介して固定櫛歯48に印加されることができる。一実施形態では、AC電圧は、可動櫛歯46(および従って駆動質量構造36および38)を、固定櫛歯48に対して概して平行に運動させるように、固定櫛歯48に適切に印加される。駆動質量構造36および38は、共に適切に連結されるか、または他の様態で適切に駆動されて、Y軸54に沿って対向する二つの方向(opposite directions)に、すなわち逆位相で、運動することができる。
【0018】
複数の連結ばね構成要素56はそれぞれ、駆動質量構造36および38の各々を感知質量32に結合する。従って、駆動質量構造36および38は基板28の表面50の上に懸垂され、基板28に対して直接物理的に取り付けられていない。連結ばね構成要素56は、平面24におけるY軸54に沿った駆動質量構造36および38の大きな振動線形運動を可能にし、なお駆動質量構造36および38から感知質量32までZ軸26に沿ってコリオリの力を伝達するのに十分な剛性を有する、任意の好都合な形状、サイズ、および材質であってよい。
【0019】
ジャイロセンサ20は、軸上トーションばね58、および軸外ばねシステム60をさらに含む。軸上トーションばね58は、感知質量32に結合され、X回転軸22と同一ロケーションに配置されている。示されている実施形態では、軸上トーションばね58の各々は、感知質量32を、同じくX回転軸22と同一ロケーションに配置されたアンカー62を介して基板28の表面50に接続する。
【0020】
感知質量32は、X回転軸22の対向する両側(2つの側)に対称に配置された外側端部64および66を含む。すなわち、感知質量32の枠組み構造が、X回転軸22を中心として置かれ、それによって、外側端部64および66は、X回転軸22から等距離にある。示されている実施形態では、軸外ばねシステム60は、軸外ばね68、70、72、および74を含む。軸外ばね68および72は、感知質量32の外側端部64に配置されており、軸外ばね70および74は、感知質量32の外側端部66に配置されている。特に、軸外ばね68、70、72、および74の各々は、X回転軸22からずれたロケーションにおいて感知質量32に直接物理的に結合している接続接合部分(interface)76を有する。示されている実施形態では、ばね68、70、72、74の各々は、感知質量32を、アンカー78を介して基板28の表面50に接続する。従って、ばね68、70、72、および74は全体的に線形のばねであり、その各々が、感知質量32に結合される接続接合部分76、および、アンカー78のうちの1つに結合される反対側の端部を有し、当該ばねは、感知質量32の面外運動を抑制し、それによって感知質量32はX回転軸22を中心として回転する。
【0021】
一般的に、ばね68、70、72、および74を実装することによって被る回転剛性KR,Sは、Z軸ばね定数KZ(すなわち、線形ばね68、70、72、および74の各々のばね定数)、および、感知質量32の端部64にあるばね68、72と、端部66にあるばね70、74との間の距離Lsの関数である。回転剛性KR,Sは、図2において式80によって表されている。ばね68、70、72、および74のための事実上の枢着部(effective pivot point)は、これらのばねが同じばね定数KZを有する場合、中ほどにある。すなわち、ばね68、70、72、および74が対称に配置されている結果として、感知質量32の事実上の枢着部はX回転軸22および軸上トーションばね58と同一の空間を占めるようになる。軸上トーションばね58、ならびに、軸外ばねシステム60のばね68、70、72、および74の形状、サイズ、量、ロケーション、材質、およびばね定数は、周波数整合、安定性、および感知距離のための所望の剛性を達成するための既知の機械的設計原則に従って適切に選択されることができる。
【0022】
基板28は、1つまたは複数の絶縁層(図示せず)によって被覆される半導体層(図示せず)を含むことができる。半導体層は通常、シリコンウェーハであり、その上に、ジャイロセンサ20に関連付けられる電子装置が、いくつかの事例において、同じく従来の製造技術を使用して製造されることができる。絶縁層は、ガラス、二酸化ケイ素、窒化ケイ素、または任意の他の性質の合う材料を含むことができる。さまざまな導電板、または電極が、ジャイロセンサ20の他の固定構成要素とともに基板28の表面50上に形成される。
【0023】
簡略化された実施形態では、電極はX感知電極82および84を含む。電極82および84ならびに感知質量32に別個の電気接続を提供するために導体(図示せず)が基板28上に形成されることができる。電極82および84は、多結晶シリコンのような導電性材料から形成され、このような構成要素のために同じ材料が選択される場合には、それぞれの導体と同時に形成されることができる。電極82および84は、図2においては見ることができるが、図1においては上に重なる感知質量32によって覆い隠されている。従って、図1においては、電極82および84は、感知質量32に対するそれらの物理的配置を示すために破線形式で表されている。X感知電極82および84のみが示されているが、代替的な実施形態では、周波数同調、力フィードバック、および/または直交位相補償のために追加の電極タイプが提供されてもよいことを当業者は認識しよう。
【0024】
動作時、駆動質量30の駆動質量構造36および38は、X−Y平面24内で逆位相で振動線形運動を受ける。回転軸がX軸22と指定されている、示されている実施形態では、駆動質量構造36および38は、Y軸54に実質的に平行な対向する二つの方向(すなわち、図1内の上下)において線形に振動する。コリオリの加速度成分の結果として、軸上トーションばね58、および、軸外ばねシステム60を構成するばね68、70、72、74は、感知質量32が、ジャイロセンサ20のX回転軸22を中心とする角速度、すなわち、角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0025】
感知質量32が、駆動質量30の振動線形運動に関して駆動質量30から実質的に結合解除されるが、感知質量32のX−Y平面24外の振動運動に関しては駆動質量30に結合されるように、連結ばね構成要素56は、感知質量32を駆動質量30に結合する。換言すれば、連結ばね構成要素56を介して確立される連結は、感知質量32がY軸54に沿った駆動質量30の線形運動によって比較的影響されないように構成される。しかしながら、感知質量32は、感知質量32および駆動質量30の両方が共に(jointly)ジャイロセンサ20のX回転軸22を中心とする回転の間のコリオリの力による平面外運動を受けるように、駆動質量30に連結される。感知質量32が振動平面外運動を受けると、位置変化が、電極82および84によってキャパシタンスの変化として感知される。このキャパシタンスの変化は電極82および84において感知され、従来の様式で電子的に処理されて、ジャイロセンサ20のX回転軸22を中心とする角速度が得られる。
【0026】
コリオリの力を生成するのは、駆動質量30のY軸54を中心とする駆動運動と、ジャイロセンサのX回転軸22を中心とする角速度との間の結合であり、このコリオリの力は感知質量32を、Z軸26に沿って平面24外にずらす。コリオリの力の大きさは非常に小さい。一実施形態によれば、ジャイロセンサ20の共振が、有利には出力信号(すなわち、電極82および84において感知されるキャパシタンス)を増強するために利用される。すなわち、感知質量32の振動の周波数は、駆動質量30から感知質量32までの最適なエネルギー伝達のために、駆動質量30の振動の周波数に十分に近い。
【0027】
いくつかの従来技術の慣性センサでは、軸上トーションばねは、感知質量の低周波数における(例えば、約10キロヘルツ未満の周波数における)回転を可能にするように、比較的可撓性を有するか、または柔軟であるように設計されている。不都合なことに、このような軸上トーションばねの柔軟性は、結果として駆動質量と感知質量との間の周波数不整合をもたらす可能性がある。すなわち、出力周波数(すなわち、感知質量の振動の周波数)が入力周波数(すなわち、駆動質量の振動の周波数)に十分に追随せず、または等しくならない場合がある。十分なねじり剛性を達成するために、他の従来のジャイロセンサ設計においては、トーションばねは短く幅広になるように設計されている。しかしながら、MEMSジャイロセンサ製造において処理はウェーハごとに異なるため、駆動ばねは曲げ運動を受ける可能性があるためにこのような短く広いトーションばねは駆動ばね(すなわち、駆動質量と感知質量との間の連結部材)に十分に追随しない場合がある。従って、従来技術の設計では感知質量の振動の周波数は駆動質量の振動の周波数から著しく異なる場合があり、それによって、結果として駆動質量から感知質量へのエネルギー伝達が準最適なものになる。
【0028】
軸上トーションばね58および軸外ばねシステム60は、感知質量32が平面24の外でジャイロセンサ20の角速度に応じて振動することを可能にする。その上、軸上トーションばね58および軸外ばねシステム60は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。すなわち、軸上トーションばね58、ならびに、軸外ばねシステム60のばね68、70、72、および74は、それらの合計ばね定数が連結ばね構成要素56の合計ばね定数に実質的に等しくなるように設計される。この結果として、駆動質量30の振動の周波数(すなわち、駆動周波数)と感知質量32の振動の周波数(すなわち、感知周波数)との間の緊密な整合を達成する設計がもたらされる。従って、感知質量32は、出力信号、すなわち電極82および84において感知されるキャパシタンスを増強するために、主にそのプロセス変動に起因する広範な駆動周波数にわたる駆動周波数に実質的に等しい感知周波数において振動する。
【0029】
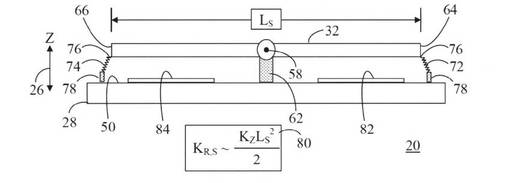
図3は、代替的な実施形態によるジャイロセンサ86の上面図を示す。ジャイロセンサ20と同様に、ジャイロセンサ86は一般的に、X回転軸22を中心とする角速度を感知するように構成される。従って、ジャイロセンサ86はX−Y平面24内で全体的に平坦な構造を有する。ジャイロセンサ86は、基板88と、駆動質量構造90および91と、感知質量92と、下記に詳細に記載されるさまざまな機械的連結機構を含む。図3の具体的な実施形態では、感知質量92は駆動質量構造90および91を貫通して延在する中央開口94内に存在している。
【0030】
ジャイロセンサ86は、駆動質量構造90および91と通信する駆動システム96をさらに含む。この実施形態では、駆動システム96は駆動質量構造90および91の外周98の外側に位置している。駆動システム96は駆動質量構造90を振動させるように構成される駆動素子のセット100、および、駆動質量構造91を振動させるように構成される駆動素子の別のセット101を含む。駆動素子の各セット100および101は、駆動質量構造90および91の各々の外周98に結合されそこから延在する可動櫛歯102と、アンカー108によって基板88の表面106に固定される固定櫛歯104とを含む。
【0031】
駆動質量構造90および91は、Y軸54に沿って対向する二つの方向に、すなわち逆位相で運動するように、共に適切に連結されるか、または他の様態で適切に駆動されることができる。連結ばね構成要素110は、駆動質量構造90および91を感知質量92に結合する。従って、駆動質量構造90および91は、基板88の表面106の上に懸垂され、基板88に対して直接物理的に取り付けられていない。連結ばね構成要素110は、駆動質量構造90および91のX−Y平面24におけるY軸54に沿った大きな振動線形運動を可能にし、なお駆動質量構造90から感知質量92までZ軸26(図2)に沿ってコリオリの力を伝達するのに十分な剛性を有する、任意の好都合な形状、サイズ、および材質であってもよい。
【0032】
ジャイロセンサ86は、軸上トーションばね112、および軸外ばねシステム114をさらに含む。軸上トーションばね112は感知質量92に結合され、X回転軸22と同一ロケーションに配置されている。示されている実施形態では、感知質量92は、感知質量92の内周部(inner periphery)118によって画定される中央開口116を含む。感知質量92の中央開口116内にアンカー構造120が存在する。一実施形態では、アンカー構造120は、X回転軸22と同一ロケーションに配置されている。軸上トーションばね112が、感知質量92を、この中央に位置するアンカー構造120を介して基板88の表面106に接続する。
【0033】
感知質量92の内周部118は、X回転軸22の対向する両側に対称に配置された内側端部122および124を含む。すなわち、感知質量92の枠組み構造がX回転軸22を中心として置かれ、それによって、内側端部122および124はX回転軸22から等距離に離間している。軸外ばねシステム114は、中央開口116内に存在する軸外ばね126および128を含む。軸外ばね126は、感知質量92の内側端部122に配置され、軸外ばね128は、感知質量92の内側端部124に配置されている。特に、軸外ばね126および128の各々は、X回転軸22からずれたロケーションにおいて感知質量92に直接物理的に結合している接続接合部分130を有する。軸外ばね126および128の各々は、アンカー120に結合しており、それによって、感知質量92を、中央に位置するアンカー120を介して基板の表面106に接続する。軸上トーションばね112、ならびに、軸外ばねシステム114のばね126および128の形状、サイズ、量、ロケーション、材質、およびばね定数は、周波数整合、安定性、および感知距離のための所望の剛性を達成するための既知の機械的設計原則に従って適切に選択されることができる。特に、軸上トーションばね112、ならびに、軸外ばねシステム114のばね126および128は、それらの合計ばね定数が、連結ばね構成要素110の合計ばね定数に実質的に等しくなるように適切に構成される。
【0034】
動作時、駆動質量構造90および91は、X−Y平面24内で逆位相で振動線形運動を受ける。回転軸がX軸22と指定されている、示されている実施形態では、駆動質量構造90および91は、Y軸54に実質的に平行な対向する二つの方向(すなわち、図3内の上下)において線形に振動する。コリオリの加速度成分の結果として、軸上トーションばね112、ならびに、軸外ばねシステム114を構成する軸外ばね126および128は、感知質量92ならびに試験質量構造90および91が、ジャイロセンサ86のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で(すなわちX回転軸22を中心として)振動することを可能にする。感知質量92が振動平面外運動を受けると、位置変化が、感知質量92の下にある電極(破線形式で示す)によってキャパシタンスの変化として感知される。このキャパシタンスの変化は続いて従来の様式で電子的に処理されて、ジャイロセンサ86のX回転軸22を中心とする角速度が得られる。
【0035】
ジャイロセンサ20(図1)と同様に、ジャイロセンサ86の軸上トーションばね112および軸外ばねシステム114は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量90の振動の周波数(すなわち、駆動周波数)と感知質量92の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成するもう一つの設計がもたらされる。
【0036】
上記で提供された例は、単軸ジャイロ慣性センサの実施形態である。しかしながら、軸上トーションばねおよび軸外ばねシステムの両方の概念は、付加的に、二軸ジャイロ慣性センサ設計に適応することができ、その2つの例が下記に例示を目的として提供される。
【0037】
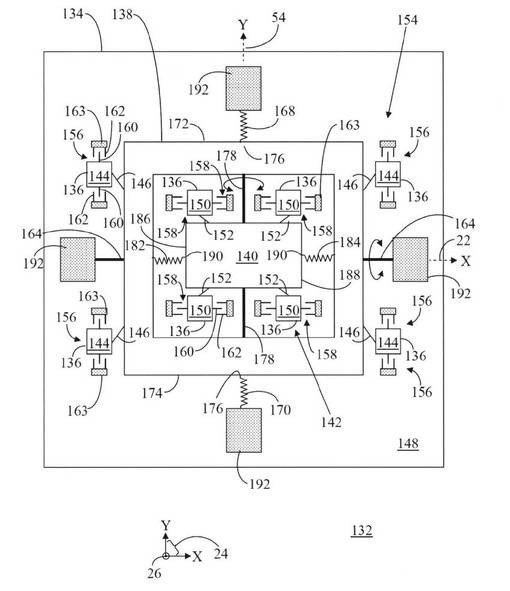
図4は、代替的な実施形態による二軸ジャイロセンサ132の上面図を示す。ジャイロセンサ132は、X−Y平面24内で全体的に平坦な構造を有し、一般的に、X回転軸22およびY回転軸54の両方を中心とする角速度を感知するように構成される。ジャイロセンサ132は、基板134と、駆動質量136と、感知質量138と、もう一つの感知質量140と、下記に詳細に記載されるさまざまな機械的連結機構を含む。図4の具体的な実施形態では、感知質量140は感知質量138を貫通して延在する中央開口142内に存在している。
【0038】
駆動質量136は、感知質量138の周囲に適切に配列され、連結ばね構成要素146を介して感知質量138に接続される複数の駆動質量構造144を含む。従って、駆動質量構造144は、基板134の表面148の上に懸垂され、基板134に対して直接物理的に取り付けられていない。駆動質量136は、感知質量140の周囲に適切に配列され、さらなる連結ばね構成要素152を介して感知質量140に接続される複数の駆動質量構造150をさらに含む。従って、駆動質量構造150も基板134の表面148の上に懸垂され、基板134に対して直接物理的に取り付けられていない。駆動質量構造144はX回転軸22を中心として互いに対して対称に配置されている。同様に、駆動質量構造150はY回転軸54を中心として互いに対して対称に配置されている。
【0039】
駆動システム154は、駆動質量構造144および150に近接して存在する。駆動システム154は、駆動質量構造144に近接する駆動素子のセット156を含み、駆動質量構造144を振動させるように構成される。駆動システム154は、駆動質量構造152に近接する駆動素子のさらなるセット158をさらに含み、駆動質量構造150を振動させるように構成される。駆動素子の各セット156および158は、可動櫛歯160および固定櫛歯162を含む。一実施形態では、可動櫛歯160は、駆動質量構造144および150の各々の周縁に結合されてそこから延在し、固定櫛歯162は、アンカー163を介して基板134の表面148に結合される。固定櫛歯162は、可動櫛歯160から離間され、互い違いの配列で配置されている。
【0040】
駆動質量構造144および150は、X−Y平面24内で振動運動を受けるように構成される。一般的に、駆動質量構造144をY軸54に実質的に平行に線形に振動させるように、交流電流(AC)電圧が駆動回路(図示せず)を介して駆動素子156の固定櫛歯162に印加されることができる。同様の原理によって、駆動質量構造150を、X軸22に実質的に平行に線形に振動させるように、AC電圧が駆動回路を介して駆動素子のセットの158の固定櫛歯162に印加されることができる。
【0041】
二軸ジャイロセンサ132は、感知質量138に結合されるとともにX回転軸22と同一ロケーションに配置された軸上トーションばね164と、軸外ばねシステムとをさらに含む。示されている実施形態では、軸外ばねシステムは、軸外ばね168および170を含む。軸外ばね168は、感知質量138の外側端部172に配置され、軸外ばね170は、感知質量138の外側端部174に配置され、ここで、外側端部172および174はX回転軸22の対向する両側に対称に配置されている。特に、軸外ばね168および170の各々は、X回転軸22からずれたロケーションにおいて感知質量138に直接物理的に結合している接続接合部分176を有する。軸上トーションばね164ならびに軸外ばね168および170は、感知質量138が、ジャイロセンサ132のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0042】
加えて、二軸ジャイロセンサ132は、感知質量140に結合されるとともにY回転軸54と同一ロケーションに配置された軸上トーションばね178と、軸外ばねシステムとを含む。示されている実施形態では、軸外ばねシステムは、軸外ばね182および184を含む。軸外ばね182は、感知質量140の外側端部186に配置され、軸外ばね184は、感知質量140の外側端部188に配置され、ここで外側端部186および188はY回転軸54の対向する両側に対称に位置している。特に、軸外ばね182および184の各々は、Y回転軸54からずれたロケーションにおいて感知質量140に直接物理的に結合している接続接合部分190を有する。軸上トーションばね178、ならびに、軸外ばねシステムの軸外ばね182および184は、感知質量140が、ジャイロセンサ132のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0043】
示されている実施形態では、軸上トーションばね164ならびに軸外トーションばね168および170の各々は、感知質量138を、アンカー192を介して基板134の表面148に接続する。加えて、軸上トーションばね178ならびに軸外トーションばね182および184の各々は、内側の感知質量140を感知質量138に接続する。従って、感知質量138および140の各々は、下にある基板134の上に懸垂される。感知質量138および140の各々が、振動平面外運動を受けるときの位置変化を感知するために、感知質量138および140の下層の適切なロケーションにおいて、基板134の表面148上に、電極(図示せず)が形成される。
【0044】
動作時、駆動質量136の駆動質量構造144および150はX−Y平面24内で振動線形運動を受ける。示されている実施形態では、駆動質量構造144は、Y軸54に実質的に平行に(すなわち、図4において上下に)線形に振動する。X回転軸22の対向する両側の駆動質量構造144は、上述のように対向する二つの方向に(逆位相で)線形に振動するように駆動されることができる。加えて、駆動質量構造150は、X軸22に実質的に平行に(すなわち、図4において左右に)線形に振動する。駆動質量構造144と同様に、X回転軸54の対向する両側の駆動質量構造150は、対向する二つの方向に(逆位相で)線形に振動するように駆動されることができる。
【0045】
コリオリの加速度成分の結果として、軸上トーションばね164ならびに軸外ばね168および170は、感知質量138が、ジャイロセンサ132のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26(図1)に沿ってX−Y平面24外で振動することを可能にする。同じ原理によって、軸上トーションばね178ならびに軸外ばね182および184は、感知質量140が、ジャイロセンサ132のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0046】
ジャイロセンサ20に関連して上述したように、ジャイロセンサ132の軸上トーションばね164ならびに軸外ばね168および170は共同して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量構造144の振動の周波数(すなわち、駆動周波数)と感知質量138の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する設計がもたらされる。同様に、軸上トーションばね178ならびに軸外ばね182および184は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量構造150の振動の周波数(すなわち、駆動周波数)と感知質量140の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する設計がもたらされる。
【0047】
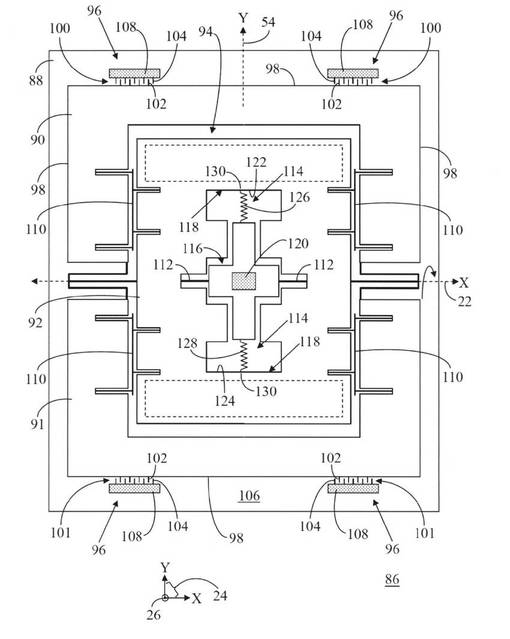
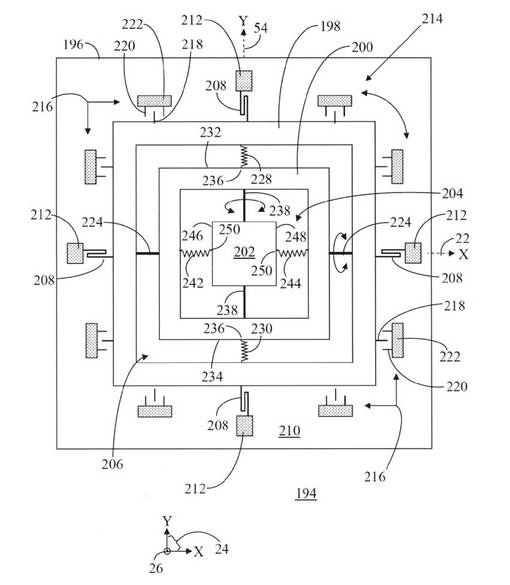
図5は、さらに別の代替的な実施形態による二軸ジャイロセンサ194の上面図を示す。二軸ジャイロセンサ132(図4)は、X軸およびY軸に平行なそれらのそれぞれの方向において線形に振動する複数の駆動質量構造を含む構成を実装する。二軸ジャイロセンサ194の代替的な実施形態では、単一の駆動質量が、X−Y平面24に実質的に平行な平面においてZ軸26を中心とする回転運動において振動するように駆動される。ジャイロセンサ194は、X−Y平面24内で全体的に平坦な構造を有し、一般的に、X回転軸22およびY回転軸54の両方を中心とする角速度を感知するように構成される。
【0048】
ジャイロセンサ194は、基板196と、駆動質量198と、感知質量200と、もう一つの感知質量202と、下記に詳細に記載されるさまざまな機械的連結機構とを含む。図5の具体的な実施形態では、感知質量202は、感知質量200を貫通して延在する中央開口204内に存在し、感知質量200は、駆動質量198を貫通して延在する中央開口206内に存在する。従って、駆動質量198および感知質量200は、枠組み構造であり、駆動質量198、感知質量200、および感知質量202の各々は共通の中心を有する。
【0049】
複数の折りたたみばね208が駆動質量198に接続され、複数の折りたたみばね208の各々がアンカー212を介して基板196の表面210に結合される。従って、駆動質量198は、表面210の上に懸垂される。駆動システム214は、駆動質量198に近接して存在する。駆動システム214は、駆動質量198を回転運動において振動させるための、駆動質量198に近接する駆動素子のセット216を含む。駆動素子の各セット216は、可動櫛歯218および固定櫛歯220を含む。一実施形態では、可動櫛歯218は、駆動質量198の周縁に結合されてそこから延在し、固定櫛歯220は、アンカー222を介して基板196の表面210に結合される。固定櫛歯220は、可動櫛歯218から離間され、互い違いの配列で配置されている。
【0050】
駆動質量198は、X−Y平面24に実質的に平行なZ軸26を中心とする回転振動運動を受けるように構成される。一般的に、駆動質量198を、適切に印加される電圧および折りたたみばね208の構造に起因してZ軸26を中心として振動させるように、交流電流(AC)電圧が、駆動回路(図示せず)を介して固定櫛歯220に印加されることができる。
【0051】
二軸ジャイロセンサ194は、感知質量200に結合されるとともにX回転軸22と同一ロケーションに配置された軸上トーションばね224と、軸外ばねシステムとをさらに含む。示されている実施形態では、軸外ばねシステムは、軸外ばね228および230を含む。軸外ばね228は、感知質量200の内側端部232に配置され、軸外ばね230は、感知質量200の内側端部234に配置され、ここで、内側端部232および234は、X回転軸22の対向する両側に対称に位置している。特に、軸外ばね228および230の各々は、X回転軸22からずれたロケーションにおいて感知質量200に直接物理的に結合している接続接合部分236を有する。軸上トーションばね224ならびに軸外ばね228および230は、感知質量200が、ジャイロセンサ194のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0052】
加えて、二軸ジャイロセンサ194は、感知質量202に結合されるとともにY回転軸54と同一ロケーションに配置された軸上トーションばね238と、軸外ばねシステムとを含む。示されている実施形態では、軸外ばねシステムは、軸外ばね242および244を含む。軸外ばね242は、感知質量202の外側端部246に配置され、軸外ばね244は、感知質量202の外側端部248に配置され、ここで外側端部246および248は、Y回転軸54の対向する両側に対称に位置している。特に、軸外ばね242および244の各々は、Y回転軸54からずれたロケーションにおいて感知質量202に直接物理的に結合している接続接合部分250を有する。軸上トーションばね238ならびに軸外ばね242および244は、感知質量202が、ジャイロセンサ194のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0053】
示されている実施形態では、軸上トーションばね224ならびに軸外トーションばね228および230の各々は、感知質量200を駆動質量198に接続する。加えて、軸上トーションばね238ならびに軸外トーションばね242および244の各々は、内側の感知質量202を感知質量200に接続する。従って、感知質量200および202の各々は下にある基板196の上に懸垂される。感知質量200および202の各々が振動平面外運動を受けるときの位置変化を感知するために、感知質量200および202の下層の適切なロケーションにおいて基板196の表面210上に、電極(図示せず)が形成される。
【0054】
動作時、駆動システム216は、基板210に垂直なZ回転軸26を中心とする、基板196の表面210に平行な平面における駆動質量198の機械的振動を可能にする。感知質量200および感知質量202の両方は、駆動質量198と共に、この運動に対するそれぞれの軸上トーションばね224および238の高い剛性に起因して、Z回転軸26を中心として振動する。感知質量200および202がZ回転軸26を中心とする振動運動に入ると、感知質量200は、ジャイロセンサ194のY回転軸54を中心とする角運動速度を検出することが可能になる。特に、ジャイロセンサ194のY回転軸54を中心とする角運動速度は、感知質量200に、ジャイロセンサ194のY回転軸54を中心とする角回転速度に比例する振幅において、その感知軸、すなわちX回転軸22を中心として振動させるコリオリの加速度を生成する。同様の原理によって、感知質量202は、ジャイロセンサ194のX回転軸22を中心とする角運動速度を検出することが可能である。すなわち、ジャイロセンサ194がX回転軸22を中心とする角運動速度を受けると、コリオリの加速度がY回転軸54を中心として発生する。コリオリの加速度の結果として、感知質量202がその感知軸、すなわちY回転軸54を中心として運動することになる。
【0055】
軸上トーションばね224ならびに軸外トーションばね228および230は、協働して機能して、駆動質量198の振動の周波数(すなわち、駆動周波数)と感知質量200の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する。同様に、軸上トーションばね238ならびに軸外トーションばね242および244は協働して機能して、駆動質量198の振動の周波数(すなわち、駆動周波数)と感知質量202の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する。
【0056】
ジャイロセンサ194は、駆動質量および感知質量(複数の場合もあり)のための全体的に矩形の構造198、200、および202によって提供される。しかしながら、代替的な実施形態では、駆動質量および/または感知質量(複数の場合もあり)は、円形リング、ディスクなどのような異なる形状を有することができる。加えて、駆動質量および感知質量(複数の場合もあり)は図示されているものとは異なって配列されてもよい。例えば、1つの感知質量が中央に配置されてもよく、もう一つの感知質量が外側枠組み構造を形成してもよく、駆動質量が2つの感知質量の間に入ってもよい。本明細書に記載されている実施形態によれば、このような構造に変化があっても、協働して機能して、駆動周波数と感知周波数とのより緊密な整合を達成する軸上トーションばねおよび軸外ばねシステムをなお含むことになる。加えて、本明細書においてジャイロセンサが記載されているが、軸上トーションばねおよび軸外ばねシステムの組み合わせは、角運動速度の変化率を測定する角加速度設計において容易に実装することができることが理解されるべきである。
【0057】
要約すると、本発明の実施形態は、1つまたは複数のシーソー型感知質量を有するジャイロセンサおよび角加速度計の形態の微小電気機械システム(MEMS)慣性センサデバイスをもたらす。特に、ジャイロセンサは、コリオリの加速度成分の影響による、ジャイロセンサの基板に平行な軸を中心とする角回転を感知するように構成される。ジャイロセンサのさまざまな実施形態は、軸上トーションばね、およびシーソー感知質量に結合される軸外ばねシステムの両方を含む。軸上トーションばねは回転軸に沿って配置され、軸外ばねシステムは、回転軸からずれた1つまたは複数のロケーションにおいて感知質量に結合される。軸外ばねシステムは回転軸において、ジャイロセンサの駆動周波数と感知周波数との間の整合性の向上を達成するのに十分なねじり剛性を提供する。駆動周波数と感知周波数との間の整合性が向上すると、駆動質量から感知質量へのエネルギー伝達が増大し、それによって信号出力が増強される。その上、軸外ばねシステムを含む角慣性センサデバイスは、製造プロセス変動の影響をより受けにくいを既存の製造技術を使用して製造されることができ、一貫して誤りのより少ない信号成分を提供することができる。
【0058】
本発明の好ましい実施形態が詳細に例示および記載されてきたが、本発明の精神または添付の特許請求項の範囲から逸脱することなく、そこにさまざまな改変を行うことができることが当業者には容易に明らかとなろう。すなわち、例示的な実施形態は例に過ぎず、本発明の範囲、適用性または構成を限定することは意図されていないことが理解されるべきである。
【符号の説明】
【0059】
20…慣性センサ、22…回転軸、30…駆動質量、32…感知質量、58…軸上トーションばね、60…軸外ばねシステム、76…接続接合部分。
【技術分野】
【0001】
本発明は、一般的には微小電気機械システム(MEMS)デバイスに関する。より詳細には、本発明は、駆動周波数と感知周波数との間の整合性が向上したMEMS慣性センサに関する。
【背景技術】
【0002】
微小電気機械システム(MEMS)技術は、非常に小さな機械構造を作成し、従来のバッチ半導体処理技法を使用して単一の基板上で電気デバイスとこれらの構造を取り入れる方法を提供するため、近年において広く高い評判を勝ち得ている。MEMSの1つの一般的な用途が、センサデバイスの設計および製造である。微小電気機械システム(MEMS)センサデバイスは、自動車、慣性誘導システム、家庭電化製品、ゲームデバイス、さまざまなデバイスのための保護システム、ならびに、多くの他の産業、科学、および工学システムのような用途に広く使用されている。
【0003】
1つまたは複数の軸を中心とする角速度または角加速度を感知するMEMS角度慣性センサが実装される場合がある。代替的に「ジャイロスコープ」、「角速度センサ」、「ジャイロメータ」、「ジャイロスコープセンサ」、または「ヨー・レート・センサ」と称されるMEMSジャイロセンサは、1つまたは複数の軸を中心とする角速度または運動速度を感知する慣性センサである。「x軸」ジャイロと称される1つのこのようなセンサは、コリオリの加速度成分の影響による、ジャイロ基板に平行な軸を中心とする角回転を検知するように構成される。角加速度計は、角速度の変化率を測定する加速度計である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第6892575号明細書
【特許文献2】米国特許第7434464号明細書
【特許文献3】米国特許第6915693号明細書
【特許文献4】米国特許第6921952号明細書
【特許文献5】米国特許出願公開第2009/0064780号明細書
【特許文献6】米国特許出願公開第2010/0236327号明細書
【非特許文献】
【0005】
【非特許文献1】ツァイ(TSAI)他、「二軸感知式減結合振動型ホイール・ジャイロスコープの設計とシミュレーション(Design and Simulation of a Dual−Axis Sensing Decoupled Vibratory Wheel Gyroscope)」、Sensors and Acutators A:Physical,Vol.126,Issue 1,2006年1月26日,33−40頁,www.sciencedirect.com
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の第1の側面によれば、慣性センサであって、表面を有する基板と、前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量と、前記駆動質量に連結された感知質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量上の、前記回転軸からずれたロケーションにおいて、前記感知質量に結合された接続接合部分を有する軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が前記平面外で振動することを可能にする、慣性センサが提供される。
【0007】
本発明の第2の側面によれば、慣性センサであって、表面を有する基板と、回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を有する感知質量であって、該感知質量は中央開口を含む、前記感知質量と、前記感知質量に連結されるとともに前記中央開口内に存在する駆動質量であって、該駆動質量は、前記表面に実質的に平行な平面内で振動運動を受けるように構成されている、前記駆動質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量の前記第1の外側端部に配置された第1の軸外ばね、および、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねを含む軸外ばねシステムであって、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を含む、前記軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記回転軸を中心として前記平面外で回転することを可能にする、慣性センサが提供される。
【0008】
本発明の第3の側面によれば、慣性センサであって、表面を有する基板と、駆動周波数において前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量であって、該駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、該第1の駆動質量構造および該第2の駆動質量構造は、回転軸に対する鏡映対称性を呈し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記平面に平行な対向する二つの方向において駆動される、前記駆動質量と、前記駆動質量に連結された感知質量と、前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を有する軸外ばねシステムとを備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前期感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記平面外で振動することを可能にする、慣性センサが提供される。
【図面の簡単な説明】
【0009】
【図1】一実施形態によるジャイロセンサの上面図を示す。
【図2】図1のジャイロセンサの側面概念図を示す。
【図3】代替的な実施形態によるジャイロセンサの上面図を示す。
【図4】代替的な実施形態による二軸ジャイロセンサの上面図を示す。
【図5】さらに別の代替的な実施形態による二軸ジャイロセンサの上面図を示す。
【発明を実施するための形態】
【0010】
図面と併せて考察して詳細な説明および請求項を参照することで、より完全に本発明を理解することができる。これらの図面では全般にわたり同様の参照符号は類似の項目を示している。
【0011】
本明細書において開示される実施形態によって、例えば、1つまたは複数のシーソー型感知質量(sense mass)を有するジャイロセンサおよび角加速度計センサの形態の微小電気機械システム(MEMS)慣性センサデバイスがもたらされる。例示的な実施形態では、ジャイロセンサは、コリオリの加速度成分の影響による、ジャイロセンサの基板に平行な軸を中心とする角回転速度を感知するように構成されることができる。ジャイロセンサは、軸上トーションばね、およびシーソー感知質量に結合される軸外ばねシステムの両方を含む。軸上トーションばねは回転軸に沿って配置され、軸外ばねシステムは、回転軸からずれた1つまたは複数のロケーションにおいて感知質量に結合される。軸外ばねシステムは回転軸において、ジャイロセンサの駆動周波数と感知周波数との間の整合性の向上を達成するのに十分なねじり剛性を提供する。
【0012】
図1および図2を参照すると、図1は一実施形態による慣性センサ20の上面図を示しており、図2は慣性センサ20の側面概念図を示している。慣性センサ20は一般的に、回転軸22、すなわち三次元座標系におけるX軸を中心とする角速度を感知するように構成される。従って、慣性センサ20はここではジャイロセンサ20と称される。慣例により、ジャイロセンサ20は、X−Y平面24内の全体的に平坦な構造を有するものとして示されており、図1内のX−Y平面24に対して垂直なZ軸26が紙面の外に延在しており、図2に示される場合には、Z軸26は上下に延在している。
【0013】
ジャイロセンサ20は、基板28と、駆動質量(drive mass)30と、感知質量32と、下記に詳細に記載されるさまざまな機械的連結機構とを含む。図1および図2の具体的な実施形態では、駆動質量30は感知質量32を貫通して延在する中央開口34内に存在している。駆動質量30は、駆動質量構造36、および、X−Y平面24内で駆動構造36に対し側方に配置されたもう一つの駆動質量構造38を含む。駆動質量構造36および38は回転軸22を中心として互いに対して対称に配置されている。
【0014】
中央開口34内に駆動システム40が存在し、駆動システム40は、駆動質量構造36および38の各々と動作可能に通信する。より具体的には、駆動システム40は、駆動構造36を振動させるように構成される駆動素子のセット42、および、駆動構造38を振動させるように構成される駆動素子の別のセット44を含む。駆動素子の各セット42および44は、櫛歯46および48として参照される電極の対を含む。一実施形態では、櫛歯46は、駆動質量構造36および38の各々に結合され、その周縁から延在する。櫛歯48は、アンカー52を介して基板28の表面50に固定される。櫛歯48は、櫛歯46から離間され、互い違いの配列で配置されている。櫛歯46は、駆動質量構造36および38に取り付けられているため、駆動質量構造36および38とともに運動可能である。逆に、櫛歯48は、基板28に固定されて取り付けられているため、櫛歯46に対して動かない。従って、櫛歯46はここでは可動櫛歯46と称され、櫛歯48はここでは固定櫛歯48と称される。図を簡潔にするため、少数の可動櫛歯46および固定櫛歯48しか示されていない。櫛歯の量および構造は設計要件に応じて変化することを当業者は容易に認識するはずである。
【0015】
いくつかの実施形態では、固定櫛歯48の全長が基板28の表面50に取り付けられてもよい。代替的な実施形態では、固定櫛歯48の各々がアンカー52によって表される単一のロケーションにおいて基板28の表面50に固定されてもよく、固定櫛歯48の各々の残りの部分は表面28の上に懸垂されて(suspended)いる。この第2の手法は、いくつかの実施形態において、利用領域においてより高い効率を達成するのに、および、パッケージ応力に対する影響の受けやすさを低減するのに望ましい可能性がある。
【0016】
以下の図面の説明全体を通じての一貫性のために、ジャイロセンサ20の要素を、基板28の下層の表面50に接続するアンカー52のような任意の固定構造は点描のパターンで示されている。逆に、固定構造でない任意の要素はこの点描のパターンを含まず、それゆえ基板28の表面50の上に懸垂されている。
【0017】
駆動質量構造36および38は、X−Y平面24内で振動運動を受けるように構成される。一般的に、駆動質量構造36および38を、Y軸54に沿って線形に振動させるように、交流電流(AC)電圧が、駆動回路(図示せず)を介して固定櫛歯48に印加されることができる。一実施形態では、AC電圧は、可動櫛歯46(および従って駆動質量構造36および38)を、固定櫛歯48に対して概して平行に運動させるように、固定櫛歯48に適切に印加される。駆動質量構造36および38は、共に適切に連結されるか、または他の様態で適切に駆動されて、Y軸54に沿って対向する二つの方向(opposite directions)に、すなわち逆位相で、運動することができる。
【0018】
複数の連結ばね構成要素56はそれぞれ、駆動質量構造36および38の各々を感知質量32に結合する。従って、駆動質量構造36および38は基板28の表面50の上に懸垂され、基板28に対して直接物理的に取り付けられていない。連結ばね構成要素56は、平面24におけるY軸54に沿った駆動質量構造36および38の大きな振動線形運動を可能にし、なお駆動質量構造36および38から感知質量32までZ軸26に沿ってコリオリの力を伝達するのに十分な剛性を有する、任意の好都合な形状、サイズ、および材質であってよい。
【0019】
ジャイロセンサ20は、軸上トーションばね58、および軸外ばねシステム60をさらに含む。軸上トーションばね58は、感知質量32に結合され、X回転軸22と同一ロケーションに配置されている。示されている実施形態では、軸上トーションばね58の各々は、感知質量32を、同じくX回転軸22と同一ロケーションに配置されたアンカー62を介して基板28の表面50に接続する。
【0020】
感知質量32は、X回転軸22の対向する両側(2つの側)に対称に配置された外側端部64および66を含む。すなわち、感知質量32の枠組み構造が、X回転軸22を中心として置かれ、それによって、外側端部64および66は、X回転軸22から等距離にある。示されている実施形態では、軸外ばねシステム60は、軸外ばね68、70、72、および74を含む。軸外ばね68および72は、感知質量32の外側端部64に配置されており、軸外ばね70および74は、感知質量32の外側端部66に配置されている。特に、軸外ばね68、70、72、および74の各々は、X回転軸22からずれたロケーションにおいて感知質量32に直接物理的に結合している接続接合部分(interface)76を有する。示されている実施形態では、ばね68、70、72、74の各々は、感知質量32を、アンカー78を介して基板28の表面50に接続する。従って、ばね68、70、72、および74は全体的に線形のばねであり、その各々が、感知質量32に結合される接続接合部分76、および、アンカー78のうちの1つに結合される反対側の端部を有し、当該ばねは、感知質量32の面外運動を抑制し、それによって感知質量32はX回転軸22を中心として回転する。
【0021】
一般的に、ばね68、70、72、および74を実装することによって被る回転剛性KR,Sは、Z軸ばね定数KZ(すなわち、線形ばね68、70、72、および74の各々のばね定数)、および、感知質量32の端部64にあるばね68、72と、端部66にあるばね70、74との間の距離Lsの関数である。回転剛性KR,Sは、図2において式80によって表されている。ばね68、70、72、および74のための事実上の枢着部(effective pivot point)は、これらのばねが同じばね定数KZを有する場合、中ほどにある。すなわち、ばね68、70、72、および74が対称に配置されている結果として、感知質量32の事実上の枢着部はX回転軸22および軸上トーションばね58と同一の空間を占めるようになる。軸上トーションばね58、ならびに、軸外ばねシステム60のばね68、70、72、および74の形状、サイズ、量、ロケーション、材質、およびばね定数は、周波数整合、安定性、および感知距離のための所望の剛性を達成するための既知の機械的設計原則に従って適切に選択されることができる。
【0022】
基板28は、1つまたは複数の絶縁層(図示せず)によって被覆される半導体層(図示せず)を含むことができる。半導体層は通常、シリコンウェーハであり、その上に、ジャイロセンサ20に関連付けられる電子装置が、いくつかの事例において、同じく従来の製造技術を使用して製造されることができる。絶縁層は、ガラス、二酸化ケイ素、窒化ケイ素、または任意の他の性質の合う材料を含むことができる。さまざまな導電板、または電極が、ジャイロセンサ20の他の固定構成要素とともに基板28の表面50上に形成される。
【0023】
簡略化された実施形態では、電極はX感知電極82および84を含む。電極82および84ならびに感知質量32に別個の電気接続を提供するために導体(図示せず)が基板28上に形成されることができる。電極82および84は、多結晶シリコンのような導電性材料から形成され、このような構成要素のために同じ材料が選択される場合には、それぞれの導体と同時に形成されることができる。電極82および84は、図2においては見ることができるが、図1においては上に重なる感知質量32によって覆い隠されている。従って、図1においては、電極82および84は、感知質量32に対するそれらの物理的配置を示すために破線形式で表されている。X感知電極82および84のみが示されているが、代替的な実施形態では、周波数同調、力フィードバック、および/または直交位相補償のために追加の電極タイプが提供されてもよいことを当業者は認識しよう。
【0024】
動作時、駆動質量30の駆動質量構造36および38は、X−Y平面24内で逆位相で振動線形運動を受ける。回転軸がX軸22と指定されている、示されている実施形態では、駆動質量構造36および38は、Y軸54に実質的に平行な対向する二つの方向(すなわち、図1内の上下)において線形に振動する。コリオリの加速度成分の結果として、軸上トーションばね58、および、軸外ばねシステム60を構成するばね68、70、72、74は、感知質量32が、ジャイロセンサ20のX回転軸22を中心とする角速度、すなわち、角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0025】
感知質量32が、駆動質量30の振動線形運動に関して駆動質量30から実質的に結合解除されるが、感知質量32のX−Y平面24外の振動運動に関しては駆動質量30に結合されるように、連結ばね構成要素56は、感知質量32を駆動質量30に結合する。換言すれば、連結ばね構成要素56を介して確立される連結は、感知質量32がY軸54に沿った駆動質量30の線形運動によって比較的影響されないように構成される。しかしながら、感知質量32は、感知質量32および駆動質量30の両方が共に(jointly)ジャイロセンサ20のX回転軸22を中心とする回転の間のコリオリの力による平面外運動を受けるように、駆動質量30に連結される。感知質量32が振動平面外運動を受けると、位置変化が、電極82および84によってキャパシタンスの変化として感知される。このキャパシタンスの変化は電極82および84において感知され、従来の様式で電子的に処理されて、ジャイロセンサ20のX回転軸22を中心とする角速度が得られる。
【0026】
コリオリの力を生成するのは、駆動質量30のY軸54を中心とする駆動運動と、ジャイロセンサのX回転軸22を中心とする角速度との間の結合であり、このコリオリの力は感知質量32を、Z軸26に沿って平面24外にずらす。コリオリの力の大きさは非常に小さい。一実施形態によれば、ジャイロセンサ20の共振が、有利には出力信号(すなわち、電極82および84において感知されるキャパシタンス)を増強するために利用される。すなわち、感知質量32の振動の周波数は、駆動質量30から感知質量32までの最適なエネルギー伝達のために、駆動質量30の振動の周波数に十分に近い。
【0027】
いくつかの従来技術の慣性センサでは、軸上トーションばねは、感知質量の低周波数における(例えば、約10キロヘルツ未満の周波数における)回転を可能にするように、比較的可撓性を有するか、または柔軟であるように設計されている。不都合なことに、このような軸上トーションばねの柔軟性は、結果として駆動質量と感知質量との間の周波数不整合をもたらす可能性がある。すなわち、出力周波数(すなわち、感知質量の振動の周波数)が入力周波数(すなわち、駆動質量の振動の周波数)に十分に追随せず、または等しくならない場合がある。十分なねじり剛性を達成するために、他の従来のジャイロセンサ設計においては、トーションばねは短く幅広になるように設計されている。しかしながら、MEMSジャイロセンサ製造において処理はウェーハごとに異なるため、駆動ばねは曲げ運動を受ける可能性があるためにこのような短く広いトーションばねは駆動ばね(すなわち、駆動質量と感知質量との間の連結部材)に十分に追随しない場合がある。従って、従来技術の設計では感知質量の振動の周波数は駆動質量の振動の周波数から著しく異なる場合があり、それによって、結果として駆動質量から感知質量へのエネルギー伝達が準最適なものになる。
【0028】
軸上トーションばね58および軸外ばねシステム60は、感知質量32が平面24の外でジャイロセンサ20の角速度に応じて振動することを可能にする。その上、軸上トーションばね58および軸外ばねシステム60は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。すなわち、軸上トーションばね58、ならびに、軸外ばねシステム60のばね68、70、72、および74は、それらの合計ばね定数が連結ばね構成要素56の合計ばね定数に実質的に等しくなるように設計される。この結果として、駆動質量30の振動の周波数(すなわち、駆動周波数)と感知質量32の振動の周波数(すなわち、感知周波数)との間の緊密な整合を達成する設計がもたらされる。従って、感知質量32は、出力信号、すなわち電極82および84において感知されるキャパシタンスを増強するために、主にそのプロセス変動に起因する広範な駆動周波数にわたる駆動周波数に実質的に等しい感知周波数において振動する。
【0029】
図3は、代替的な実施形態によるジャイロセンサ86の上面図を示す。ジャイロセンサ20と同様に、ジャイロセンサ86は一般的に、X回転軸22を中心とする角速度を感知するように構成される。従って、ジャイロセンサ86はX−Y平面24内で全体的に平坦な構造を有する。ジャイロセンサ86は、基板88と、駆動質量構造90および91と、感知質量92と、下記に詳細に記載されるさまざまな機械的連結機構を含む。図3の具体的な実施形態では、感知質量92は駆動質量構造90および91を貫通して延在する中央開口94内に存在している。
【0030】
ジャイロセンサ86は、駆動質量構造90および91と通信する駆動システム96をさらに含む。この実施形態では、駆動システム96は駆動質量構造90および91の外周98の外側に位置している。駆動システム96は駆動質量構造90を振動させるように構成される駆動素子のセット100、および、駆動質量構造91を振動させるように構成される駆動素子の別のセット101を含む。駆動素子の各セット100および101は、駆動質量構造90および91の各々の外周98に結合されそこから延在する可動櫛歯102と、アンカー108によって基板88の表面106に固定される固定櫛歯104とを含む。
【0031】
駆動質量構造90および91は、Y軸54に沿って対向する二つの方向に、すなわち逆位相で運動するように、共に適切に連結されるか、または他の様態で適切に駆動されることができる。連結ばね構成要素110は、駆動質量構造90および91を感知質量92に結合する。従って、駆動質量構造90および91は、基板88の表面106の上に懸垂され、基板88に対して直接物理的に取り付けられていない。連結ばね構成要素110は、駆動質量構造90および91のX−Y平面24におけるY軸54に沿った大きな振動線形運動を可能にし、なお駆動質量構造90から感知質量92までZ軸26(図2)に沿ってコリオリの力を伝達するのに十分な剛性を有する、任意の好都合な形状、サイズ、および材質であってもよい。
【0032】
ジャイロセンサ86は、軸上トーションばね112、および軸外ばねシステム114をさらに含む。軸上トーションばね112は感知質量92に結合され、X回転軸22と同一ロケーションに配置されている。示されている実施形態では、感知質量92は、感知質量92の内周部(inner periphery)118によって画定される中央開口116を含む。感知質量92の中央開口116内にアンカー構造120が存在する。一実施形態では、アンカー構造120は、X回転軸22と同一ロケーションに配置されている。軸上トーションばね112が、感知質量92を、この中央に位置するアンカー構造120を介して基板88の表面106に接続する。
【0033】
感知質量92の内周部118は、X回転軸22の対向する両側に対称に配置された内側端部122および124を含む。すなわち、感知質量92の枠組み構造がX回転軸22を中心として置かれ、それによって、内側端部122および124はX回転軸22から等距離に離間している。軸外ばねシステム114は、中央開口116内に存在する軸外ばね126および128を含む。軸外ばね126は、感知質量92の内側端部122に配置され、軸外ばね128は、感知質量92の内側端部124に配置されている。特に、軸外ばね126および128の各々は、X回転軸22からずれたロケーションにおいて感知質量92に直接物理的に結合している接続接合部分130を有する。軸外ばね126および128の各々は、アンカー120に結合しており、それによって、感知質量92を、中央に位置するアンカー120を介して基板の表面106に接続する。軸上トーションばね112、ならびに、軸外ばねシステム114のばね126および128の形状、サイズ、量、ロケーション、材質、およびばね定数は、周波数整合、安定性、および感知距離のための所望の剛性を達成するための既知の機械的設計原則に従って適切に選択されることができる。特に、軸上トーションばね112、ならびに、軸外ばねシステム114のばね126および128は、それらの合計ばね定数が、連結ばね構成要素110の合計ばね定数に実質的に等しくなるように適切に構成される。
【0034】
動作時、駆動質量構造90および91は、X−Y平面24内で逆位相で振動線形運動を受ける。回転軸がX軸22と指定されている、示されている実施形態では、駆動質量構造90および91は、Y軸54に実質的に平行な対向する二つの方向(すなわち、図3内の上下)において線形に振動する。コリオリの加速度成分の結果として、軸上トーションばね112、ならびに、軸外ばねシステム114を構成する軸外ばね126および128は、感知質量92ならびに試験質量構造90および91が、ジャイロセンサ86のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で(すなわちX回転軸22を中心として)振動することを可能にする。感知質量92が振動平面外運動を受けると、位置変化が、感知質量92の下にある電極(破線形式で示す)によってキャパシタンスの変化として感知される。このキャパシタンスの変化は続いて従来の様式で電子的に処理されて、ジャイロセンサ86のX回転軸22を中心とする角速度が得られる。
【0035】
ジャイロセンサ20(図1)と同様に、ジャイロセンサ86の軸上トーションばね112および軸外ばねシステム114は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量90の振動の周波数(すなわち、駆動周波数)と感知質量92の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成するもう一つの設計がもたらされる。
【0036】
上記で提供された例は、単軸ジャイロ慣性センサの実施形態である。しかしながら、軸上トーションばねおよび軸外ばねシステムの両方の概念は、付加的に、二軸ジャイロ慣性センサ設計に適応することができ、その2つの例が下記に例示を目的として提供される。
【0037】
図4は、代替的な実施形態による二軸ジャイロセンサ132の上面図を示す。ジャイロセンサ132は、X−Y平面24内で全体的に平坦な構造を有し、一般的に、X回転軸22およびY回転軸54の両方を中心とする角速度を感知するように構成される。ジャイロセンサ132は、基板134と、駆動質量136と、感知質量138と、もう一つの感知質量140と、下記に詳細に記載されるさまざまな機械的連結機構を含む。図4の具体的な実施形態では、感知質量140は感知質量138を貫通して延在する中央開口142内に存在している。
【0038】
駆動質量136は、感知質量138の周囲に適切に配列され、連結ばね構成要素146を介して感知質量138に接続される複数の駆動質量構造144を含む。従って、駆動質量構造144は、基板134の表面148の上に懸垂され、基板134に対して直接物理的に取り付けられていない。駆動質量136は、感知質量140の周囲に適切に配列され、さらなる連結ばね構成要素152を介して感知質量140に接続される複数の駆動質量構造150をさらに含む。従って、駆動質量構造150も基板134の表面148の上に懸垂され、基板134に対して直接物理的に取り付けられていない。駆動質量構造144はX回転軸22を中心として互いに対して対称に配置されている。同様に、駆動質量構造150はY回転軸54を中心として互いに対して対称に配置されている。
【0039】
駆動システム154は、駆動質量構造144および150に近接して存在する。駆動システム154は、駆動質量構造144に近接する駆動素子のセット156を含み、駆動質量構造144を振動させるように構成される。駆動システム154は、駆動質量構造152に近接する駆動素子のさらなるセット158をさらに含み、駆動質量構造150を振動させるように構成される。駆動素子の各セット156および158は、可動櫛歯160および固定櫛歯162を含む。一実施形態では、可動櫛歯160は、駆動質量構造144および150の各々の周縁に結合されてそこから延在し、固定櫛歯162は、アンカー163を介して基板134の表面148に結合される。固定櫛歯162は、可動櫛歯160から離間され、互い違いの配列で配置されている。
【0040】
駆動質量構造144および150は、X−Y平面24内で振動運動を受けるように構成される。一般的に、駆動質量構造144をY軸54に実質的に平行に線形に振動させるように、交流電流(AC)電圧が駆動回路(図示せず)を介して駆動素子156の固定櫛歯162に印加されることができる。同様の原理によって、駆動質量構造150を、X軸22に実質的に平行に線形に振動させるように、AC電圧が駆動回路を介して駆動素子のセットの158の固定櫛歯162に印加されることができる。
【0041】
二軸ジャイロセンサ132は、感知質量138に結合されるとともにX回転軸22と同一ロケーションに配置された軸上トーションばね164と、軸外ばねシステムとをさらに含む。示されている実施形態では、軸外ばねシステムは、軸外ばね168および170を含む。軸外ばね168は、感知質量138の外側端部172に配置され、軸外ばね170は、感知質量138の外側端部174に配置され、ここで、外側端部172および174はX回転軸22の対向する両側に対称に配置されている。特に、軸外ばね168および170の各々は、X回転軸22からずれたロケーションにおいて感知質量138に直接物理的に結合している接続接合部分176を有する。軸上トーションばね164ならびに軸外ばね168および170は、感知質量138が、ジャイロセンサ132のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0042】
加えて、二軸ジャイロセンサ132は、感知質量140に結合されるとともにY回転軸54と同一ロケーションに配置された軸上トーションばね178と、軸外ばねシステムとを含む。示されている実施形態では、軸外ばねシステムは、軸外ばね182および184を含む。軸外ばね182は、感知質量140の外側端部186に配置され、軸外ばね184は、感知質量140の外側端部188に配置され、ここで外側端部186および188はY回転軸54の対向する両側に対称に位置している。特に、軸外ばね182および184の各々は、Y回転軸54からずれたロケーションにおいて感知質量140に直接物理的に結合している接続接合部分190を有する。軸上トーションばね178、ならびに、軸外ばねシステムの軸外ばね182および184は、感知質量140が、ジャイロセンサ132のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0043】
示されている実施形態では、軸上トーションばね164ならびに軸外トーションばね168および170の各々は、感知質量138を、アンカー192を介して基板134の表面148に接続する。加えて、軸上トーションばね178ならびに軸外トーションばね182および184の各々は、内側の感知質量140を感知質量138に接続する。従って、感知質量138および140の各々は、下にある基板134の上に懸垂される。感知質量138および140の各々が、振動平面外運動を受けるときの位置変化を感知するために、感知質量138および140の下層の適切なロケーションにおいて、基板134の表面148上に、電極(図示せず)が形成される。
【0044】
動作時、駆動質量136の駆動質量構造144および150はX−Y平面24内で振動線形運動を受ける。示されている実施形態では、駆動質量構造144は、Y軸54に実質的に平行に(すなわち、図4において上下に)線形に振動する。X回転軸22の対向する両側の駆動質量構造144は、上述のように対向する二つの方向に(逆位相で)線形に振動するように駆動されることができる。加えて、駆動質量構造150は、X軸22に実質的に平行に(すなわち、図4において左右に)線形に振動する。駆動質量構造144と同様に、X回転軸54の対向する両側の駆動質量構造150は、対向する二つの方向に(逆位相で)線形に振動するように駆動されることができる。
【0045】
コリオリの加速度成分の結果として、軸上トーションばね164ならびに軸外ばね168および170は、感知質量138が、ジャイロセンサ132のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26(図1)に沿ってX−Y平面24外で振動することを可能にする。同じ原理によって、軸上トーションばね178ならびに軸外ばね182および184は、感知質量140が、ジャイロセンサ132のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0046】
ジャイロセンサ20に関連して上述したように、ジャイロセンサ132の軸上トーションばね164ならびに軸外ばね168および170は共同して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量構造144の振動の周波数(すなわち、駆動周波数)と感知質量138の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する設計がもたらされる。同様に、軸上トーションばね178ならびに軸外ばね182および184は協働して機能して、ジャイロセンサ製造プロセスにおける変動に起因するばね定数変動を効果的に低減する。この結果として、駆動質量構造150の振動の周波数(すなわち、駆動周波数)と感知質量140の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する設計がもたらされる。
【0047】
図5は、さらに別の代替的な実施形態による二軸ジャイロセンサ194の上面図を示す。二軸ジャイロセンサ132(図4)は、X軸およびY軸に平行なそれらのそれぞれの方向において線形に振動する複数の駆動質量構造を含む構成を実装する。二軸ジャイロセンサ194の代替的な実施形態では、単一の駆動質量が、X−Y平面24に実質的に平行な平面においてZ軸26を中心とする回転運動において振動するように駆動される。ジャイロセンサ194は、X−Y平面24内で全体的に平坦な構造を有し、一般的に、X回転軸22およびY回転軸54の両方を中心とする角速度を感知するように構成される。
【0048】
ジャイロセンサ194は、基板196と、駆動質量198と、感知質量200と、もう一つの感知質量202と、下記に詳細に記載されるさまざまな機械的連結機構とを含む。図5の具体的な実施形態では、感知質量202は、感知質量200を貫通して延在する中央開口204内に存在し、感知質量200は、駆動質量198を貫通して延在する中央開口206内に存在する。従って、駆動質量198および感知質量200は、枠組み構造であり、駆動質量198、感知質量200、および感知質量202の各々は共通の中心を有する。
【0049】
複数の折りたたみばね208が駆動質量198に接続され、複数の折りたたみばね208の各々がアンカー212を介して基板196の表面210に結合される。従って、駆動質量198は、表面210の上に懸垂される。駆動システム214は、駆動質量198に近接して存在する。駆動システム214は、駆動質量198を回転運動において振動させるための、駆動質量198に近接する駆動素子のセット216を含む。駆動素子の各セット216は、可動櫛歯218および固定櫛歯220を含む。一実施形態では、可動櫛歯218は、駆動質量198の周縁に結合されてそこから延在し、固定櫛歯220は、アンカー222を介して基板196の表面210に結合される。固定櫛歯220は、可動櫛歯218から離間され、互い違いの配列で配置されている。
【0050】
駆動質量198は、X−Y平面24に実質的に平行なZ軸26を中心とする回転振動運動を受けるように構成される。一般的に、駆動質量198を、適切に印加される電圧および折りたたみばね208の構造に起因してZ軸26を中心として振動させるように、交流電流(AC)電圧が、駆動回路(図示せず)を介して固定櫛歯220に印加されることができる。
【0051】
二軸ジャイロセンサ194は、感知質量200に結合されるとともにX回転軸22と同一ロケーションに配置された軸上トーションばね224と、軸外ばねシステムとをさらに含む。示されている実施形態では、軸外ばねシステムは、軸外ばね228および230を含む。軸外ばね228は、感知質量200の内側端部232に配置され、軸外ばね230は、感知質量200の内側端部234に配置され、ここで、内側端部232および234は、X回転軸22の対向する両側に対称に位置している。特に、軸外ばね228および230の各々は、X回転軸22からずれたロケーションにおいて感知質量200に直接物理的に結合している接続接合部分236を有する。軸上トーションばね224ならびに軸外ばね228および230は、感知質量200が、ジャイロセンサ194のX回転軸22を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0052】
加えて、二軸ジャイロセンサ194は、感知質量202に結合されるとともにY回転軸54と同一ロケーションに配置された軸上トーションばね238と、軸外ばねシステムとを含む。示されている実施形態では、軸外ばねシステムは、軸外ばね242および244を含む。軸外ばね242は、感知質量202の外側端部246に配置され、軸外ばね244は、感知質量202の外側端部248に配置され、ここで外側端部246および248は、Y回転軸54の対向する両側に対称に位置している。特に、軸外ばね242および244の各々は、Y回転軸54からずれたロケーションにおいて感知質量202に直接物理的に結合している接続接合部分250を有する。軸上トーションばね238ならびに軸外ばね242および244は、感知質量202が、ジャイロセンサ194のY回転軸54を中心とする角速度、すなわち角運動速度に応じてZ軸26に沿ってX−Y平面24外で振動することを可能にする。
【0053】
示されている実施形態では、軸上トーションばね224ならびに軸外トーションばね228および230の各々は、感知質量200を駆動質量198に接続する。加えて、軸上トーションばね238ならびに軸外トーションばね242および244の各々は、内側の感知質量202を感知質量200に接続する。従って、感知質量200および202の各々は下にある基板196の上に懸垂される。感知質量200および202の各々が振動平面外運動を受けるときの位置変化を感知するために、感知質量200および202の下層の適切なロケーションにおいて基板196の表面210上に、電極(図示せず)が形成される。
【0054】
動作時、駆動システム216は、基板210に垂直なZ回転軸26を中心とする、基板196の表面210に平行な平面における駆動質量198の機械的振動を可能にする。感知質量200および感知質量202の両方は、駆動質量198と共に、この運動に対するそれぞれの軸上トーションばね224および238の高い剛性に起因して、Z回転軸26を中心として振動する。感知質量200および202がZ回転軸26を中心とする振動運動に入ると、感知質量200は、ジャイロセンサ194のY回転軸54を中心とする角運動速度を検出することが可能になる。特に、ジャイロセンサ194のY回転軸54を中心とする角運動速度は、感知質量200に、ジャイロセンサ194のY回転軸54を中心とする角回転速度に比例する振幅において、その感知軸、すなわちX回転軸22を中心として振動させるコリオリの加速度を生成する。同様の原理によって、感知質量202は、ジャイロセンサ194のX回転軸22を中心とする角運動速度を検出することが可能である。すなわち、ジャイロセンサ194がX回転軸22を中心とする角運動速度を受けると、コリオリの加速度がY回転軸54を中心として発生する。コリオリの加速度の結果として、感知質量202がその感知軸、すなわちY回転軸54を中心として運動することになる。
【0055】
軸上トーションばね224ならびに軸外トーションばね228および230は、協働して機能して、駆動質量198の振動の周波数(すなわち、駆動周波数)と感知質量200の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する。同様に、軸上トーションばね238ならびに軸外トーションばね242および244は協働して機能して、駆動質量198の振動の周波数(すなわち、駆動周波数)と感知質量202の振動の周波数(すなわち、感知周波数)との間のより緊密な整合を達成する。
【0056】
ジャイロセンサ194は、駆動質量および感知質量(複数の場合もあり)のための全体的に矩形の構造198、200、および202によって提供される。しかしながら、代替的な実施形態では、駆動質量および/または感知質量(複数の場合もあり)は、円形リング、ディスクなどのような異なる形状を有することができる。加えて、駆動質量および感知質量(複数の場合もあり)は図示されているものとは異なって配列されてもよい。例えば、1つの感知質量が中央に配置されてもよく、もう一つの感知質量が外側枠組み構造を形成してもよく、駆動質量が2つの感知質量の間に入ってもよい。本明細書に記載されている実施形態によれば、このような構造に変化があっても、協働して機能して、駆動周波数と感知周波数とのより緊密な整合を達成する軸上トーションばねおよび軸外ばねシステムをなお含むことになる。加えて、本明細書においてジャイロセンサが記載されているが、軸上トーションばねおよび軸外ばねシステムの組み合わせは、角運動速度の変化率を測定する角加速度設計において容易に実装することができることが理解されるべきである。
【0057】
要約すると、本発明の実施形態は、1つまたは複数のシーソー型感知質量を有するジャイロセンサおよび角加速度計の形態の微小電気機械システム(MEMS)慣性センサデバイスをもたらす。特に、ジャイロセンサは、コリオリの加速度成分の影響による、ジャイロセンサの基板に平行な軸を中心とする角回転を感知するように構成される。ジャイロセンサのさまざまな実施形態は、軸上トーションばね、およびシーソー感知質量に結合される軸外ばねシステムの両方を含む。軸上トーションばねは回転軸に沿って配置され、軸外ばねシステムは、回転軸からずれた1つまたは複数のロケーションにおいて感知質量に結合される。軸外ばねシステムは回転軸において、ジャイロセンサの駆動周波数と感知周波数との間の整合性の向上を達成するのに十分なねじり剛性を提供する。駆動周波数と感知周波数との間の整合性が向上すると、駆動質量から感知質量へのエネルギー伝達が増大し、それによって信号出力が増強される。その上、軸外ばねシステムを含む角慣性センサデバイスは、製造プロセス変動の影響をより受けにくいを既存の製造技術を使用して製造されることができ、一貫して誤りのより少ない信号成分を提供することができる。
【0058】
本発明の好ましい実施形態が詳細に例示および記載されてきたが、本発明の精神または添付の特許請求項の範囲から逸脱することなく、そこにさまざまな改変を行うことができることが当業者には容易に明らかとなろう。すなわち、例示的な実施形態は例に過ぎず、本発明の範囲、適用性または構成を限定することは意図されていないことが理解されるべきである。
【符号の説明】
【0059】
20…慣性センサ、22…回転軸、30…駆動質量、32…感知質量、58…軸上トーションばね、60…軸外ばねシステム、76…接続接合部分。
【特許請求の範囲】
【請求項1】
慣性センサであって、
表面を有する基板と、
前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量と、
前記駆動質量に連結された感知質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量上の、前記回転軸からずれたロケーションにおいて、前記感知質量に結合された接続接合部分を有する軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が前記平面外で振動することを可能にする、慣性センサ。
【請求項2】
前記駆動質量は、駆動周波数における前記振動運動を受け、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記駆動周波数に実質的に等しい感知周波数において振動することを可能にする、請求項1に記載の慣性センサ。
【請求項3】
前記感知質量を前記駆動質量に結合する連結ばね構成要素をさらに備え、前記軸上トーションばねおよび前記軸外ばねシステムの第1の合計ばね定数は、前記連結ばね構成要素の第2の合計ばね定数に実質的に等しい、請求項1に記載の慣性センサ。
【請求項4】
前記軸外ばねシステムは、前記感知質量が前記回転軸を中心として回転するように該感知質量の運動を制限する、請求項1に記載の慣性センサ。
【請求項5】
前記感知質量は、前記回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を含み、
前記軸外ばねシステムは、前記感知質量の前記第1の外側端部に配置された第1の軸外ばねと、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねとを含み、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記接続接合部分を含む、請求項1に記載の慣性センサ。
【請求項6】
前記感知質量は、中央開口を有し、前記駆動質量は前記中央開口内に存在する、請求項1に記載の慣性センサ。
【請求項7】
前記感知質量は、前記感知質量の内周部によって画定された中央開口を含み、前記内周部は、前記回転軸の対向する両側に対称に配置された第1の内側端部および第2の内側端部を含み、
前記軸外ばねシステムは、前記中央開口内に存在する第1の軸外ばねであって、前記感知質量の前記第1の内側端部に配置された接続接合部分を有する前記第1の軸外ばねと、前記中央開口内に存在する第2の軸外ばねであって、前記感知質量の前記第2の内側端部に配置された接続接合部分を有する前記第2の軸外ばねとを含む、請求項1に記載の慣性センサ。
【請求項8】
前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量を前記基板の前記表面に接続する、請求項1に記載の慣性センサ。
【請求項9】
前記駆動質量は、中央開口を有し、前記感知質量は、前記中央開口内に存在する、請求項1に記載の慣性センサ。
【請求項10】
前記感知質量は、第2の中央開口を有し、
前記慣性センサは、前記軸上トーションばねを前記基板の前記表面に結合するアンカーをさらに備え、該アンカーは前記第2の中央開口内に配置されている、請求項9に記載の慣性センサ。
【請求項11】
前記アンカーは、前記回転軸と同一ロケーションに配置されている、請求項10に記載の慣性センサ。
【請求項12】
前記駆動質量に連結された第2の感知質量と、
前記第2の感知質量に結合された第2の軸上トーションばねであって、該第2の軸上トーションばねは、前記回転軸に垂直な第2の回転軸と同一ロケーションに配置されている、前記第2の軸上トーションばねと、
前記第2の回転軸からずれた第2のロケーションにおいて前記第2の感知質量に結合された第2の接続接合部分を有する第2の軸外ばねシステムと
をさらに備え、前記第2の軸上トーションばねおよび前記第2の軸外ばねシステムは、前記第2の感知質量が前記平面外で振動することを可能にする、請求項1に記載の慣性センサ。
【請求項13】
前記駆動質量は、
第1の駆動質量構造と、
第2の駆動質量構造と
を含み、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記回転軸に対する鏡映対称性を呈する、請求項1に記載の慣性センサ。
【請求項14】
前記第2の駆動質量構造は、前記平面内で前記第1の駆動質量構造に対して側方に配置され、
前記慣性センサは、前記第1の駆動質量構造および前記第2の駆動質量構造を、前記平面に平行な対向する二つの方向に駆動するように構成された駆動システムをさらに備える、請求項13に記載の慣性センサ。
【請求項15】
慣性センサであって、
表面を有する基板と、
回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を有する感知質量であって、該感知質量は中央開口を含む、前記感知質量と、
前記感知質量に連結されるとともに前記中央開口内に存在する駆動質量であって、該駆動質量は、前記表面に実質的に平行な平面内で振動運動を受けるように構成されている、前記駆動質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量の前記第1の外側端部に配置された第1の軸外ばね、および、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねを含む軸外ばねシステムであって、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を含む、前記軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記回転軸を中心として前記平面外で回転することを可能にする、慣性センサ。
【請求項16】
前記駆動質量は、駆動周波数における前記振動運動を受け、前記慣性センサは、前記感知質量を前記駆動質量に結合する連結ばね構成要素をさらに備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記連結ばね構成要素の第2の合計ばね定数に実質的に等しい第1の合計ばね定数を有し、前記感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記回転軸を中心として振動することを可能にする、請求項15に記載の慣性センサ。
【請求項17】
前記駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記回転軸に対する鏡映対称性を呈し、
前記慣性センサは、前記第1の駆動質量構造および前記第2の駆動質量構造を前記平面に平行な対向する二つの方向において駆動するように構成された駆動システムをさらに備える、請求項15に記載の慣性センサ。
【請求項18】
慣性センサであって、
表面を有する基板と、
駆動周波数において前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量であって、該駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、該第1の駆動質量構造および該第2の駆動質量構造は、回転軸に対する鏡映対称性を呈し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記平面に平行な対向する二つの方向において駆動される、前記駆動質量と、
前記駆動質量に連結された感知質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を有する軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前期感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記平面外で振動することを可能にする、慣性センサ。
【請求項19】
前記感知質量は、中央開口を有し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記中央開口内に存在する、請求項18に記載の慣性センサ。
【請求項20】
前記感知質量は、前記回転軸からずれて、かつ前記回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を含み、
前記軸外ばねシステムは、前記感知質量の前記第1の外側端部に配置された第1の軸外ばねと、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねとを含み、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記接続接合部分を含む、請求項18に記載の慣性センサ。
【請求項1】
慣性センサであって、
表面を有する基板と、
前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量と、
前記駆動質量に連結された感知質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量上の、前記回転軸からずれたロケーションにおいて、前記感知質量に結合された接続接合部分を有する軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が前記平面外で振動することを可能にする、慣性センサ。
【請求項2】
前記駆動質量は、駆動周波数における前記振動運動を受け、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記駆動周波数に実質的に等しい感知周波数において振動することを可能にする、請求項1に記載の慣性センサ。
【請求項3】
前記感知質量を前記駆動質量に結合する連結ばね構成要素をさらに備え、前記軸上トーションばねおよび前記軸外ばねシステムの第1の合計ばね定数は、前記連結ばね構成要素の第2の合計ばね定数に実質的に等しい、請求項1に記載の慣性センサ。
【請求項4】
前記軸外ばねシステムは、前記感知質量が前記回転軸を中心として回転するように該感知質量の運動を制限する、請求項1に記載の慣性センサ。
【請求項5】
前記感知質量は、前記回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を含み、
前記軸外ばねシステムは、前記感知質量の前記第1の外側端部に配置された第1の軸外ばねと、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねとを含み、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記接続接合部分を含む、請求項1に記載の慣性センサ。
【請求項6】
前記感知質量は、中央開口を有し、前記駆動質量は前記中央開口内に存在する、請求項1に記載の慣性センサ。
【請求項7】
前記感知質量は、前記感知質量の内周部によって画定された中央開口を含み、前記内周部は、前記回転軸の対向する両側に対称に配置された第1の内側端部および第2の内側端部を含み、
前記軸外ばねシステムは、前記中央開口内に存在する第1の軸外ばねであって、前記感知質量の前記第1の内側端部に配置された接続接合部分を有する前記第1の軸外ばねと、前記中央開口内に存在する第2の軸外ばねであって、前記感知質量の前記第2の内側端部に配置された接続接合部分を有する前記第2の軸外ばねとを含む、請求項1に記載の慣性センサ。
【請求項8】
前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量を前記基板の前記表面に接続する、請求項1に記載の慣性センサ。
【請求項9】
前記駆動質量は、中央開口を有し、前記感知質量は、前記中央開口内に存在する、請求項1に記載の慣性センサ。
【請求項10】
前記感知質量は、第2の中央開口を有し、
前記慣性センサは、前記軸上トーションばねを前記基板の前記表面に結合するアンカーをさらに備え、該アンカーは前記第2の中央開口内に配置されている、請求項9に記載の慣性センサ。
【請求項11】
前記アンカーは、前記回転軸と同一ロケーションに配置されている、請求項10に記載の慣性センサ。
【請求項12】
前記駆動質量に連結された第2の感知質量と、
前記第2の感知質量に結合された第2の軸上トーションばねであって、該第2の軸上トーションばねは、前記回転軸に垂直な第2の回転軸と同一ロケーションに配置されている、前記第2の軸上トーションばねと、
前記第2の回転軸からずれた第2のロケーションにおいて前記第2の感知質量に結合された第2の接続接合部分を有する第2の軸外ばねシステムと
をさらに備え、前記第2の軸上トーションばねおよび前記第2の軸外ばねシステムは、前記第2の感知質量が前記平面外で振動することを可能にする、請求項1に記載の慣性センサ。
【請求項13】
前記駆動質量は、
第1の駆動質量構造と、
第2の駆動質量構造と
を含み、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記回転軸に対する鏡映対称性を呈する、請求項1に記載の慣性センサ。
【請求項14】
前記第2の駆動質量構造は、前記平面内で前記第1の駆動質量構造に対して側方に配置され、
前記慣性センサは、前記第1の駆動質量構造および前記第2の駆動質量構造を、前記平面に平行な対向する二つの方向に駆動するように構成された駆動システムをさらに備える、請求項13に記載の慣性センサ。
【請求項15】
慣性センサであって、
表面を有する基板と、
回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を有する感知質量であって、該感知質量は中央開口を含む、前記感知質量と、
前記感知質量に連結されるとともに前記中央開口内に存在する駆動質量であって、該駆動質量は、前記表面に実質的に平行な平面内で振動運動を受けるように構成されている、前記駆動質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量の前記第1の外側端部に配置された第1の軸外ばね、および、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねを含む軸外ばねシステムであって、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を含む、前記軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記感知質量が、前記回転軸を中心として前記平面外で回転することを可能にする、慣性センサ。
【請求項16】
前記駆動質量は、駆動周波数における前記振動運動を受け、前記慣性センサは、前記感知質量を前記駆動質量に結合する連結ばね構成要素をさらに備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前記連結ばね構成要素の第2の合計ばね定数に実質的に等しい第1の合計ばね定数を有し、前記感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記回転軸を中心として振動することを可能にする、請求項15に記載の慣性センサ。
【請求項17】
前記駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記回転軸に対する鏡映対称性を呈し、
前記慣性センサは、前記第1の駆動質量構造および前記第2の駆動質量構造を前記平面に平行な対向する二つの方向において駆動するように構成された駆動システムをさらに備える、請求項15に記載の慣性センサ。
【請求項18】
慣性センサであって、
表面を有する基板と、
駆動周波数において前記表面に実質的に平行な平面内で振動運動を受けるように構成された駆動質量であって、該駆動質量は、第1の駆動質量構造および第2の駆動質量構造を含み、該第1の駆動質量構造および該第2の駆動質量構造は、回転軸に対する鏡映対称性を呈し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記平面に平行な対向する二つの方向において駆動される、前記駆動質量と、
前記駆動質量に連結された感知質量と、
前記感知質量に結合された軸上トーションばねであって、該軸上トーションばねは、前記回転軸と同一ロケーションに配置されている、前記軸上トーションばねと、
前記感知質量上の前記回転軸からずれたロケーションにおいて前記感知質量に結合された接続接合部分を有する軸外ばねシステムと
を備え、前記軸上トーションばねおよび前記軸外ばねシステムは、前期感知質量が、前記駆動周波数に実質的に等しい感知周波数において前記平面外で振動することを可能にする、慣性センサ。
【請求項19】
前記感知質量は、中央開口を有し、前記第1の駆動質量構造および前記第2の駆動質量構造は、前記中央開口内に存在する、請求項18に記載の慣性センサ。
【請求項20】
前記感知質量は、前記回転軸からずれて、かつ前記回転軸の対向する両側に対称に配置された第1の外側端部および第2の外側端部を含み、
前記軸外ばねシステムは、前記感知質量の前記第1の外側端部に配置された第1の軸外ばねと、前記感知質量の前記第2の外側端部に配置された第2の軸外ばねとを含み、前記第1の軸外ばねおよび前記第2の軸外ばねの各々は、前記接続接合部分を含む、請求項18に記載の慣性センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−92525(P2013−92525A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−235730(P2012−235730)
【出願日】平成24年10月25日(2012.10.25)
【出願人】(504199127)フリースケール セミコンダクター インコーポレイテッド (806)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年10月25日(2012.10.25)
【出願人】(504199127)フリースケール セミコンダクター インコーポレイテッド (806)
【Fターム(参考)】
[ Back to top ]