
軸振れ計測装置
【課題】 回転軸体の軸線方向および径方向における軸振れ量を非接触にて簡単に測定できる軸振れ計測装置を提供する。
【解決手段】 本発明の軸振れ計測装置は、回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が環状に形成されてなる反射パターンと、前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1および第2の光線と、前記所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じて生成された電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備える。
【解決手段】 本発明の軸振れ計測装置は、回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が環状に形成されてなる反射パターンと、前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1および第2の光線と、前記所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じて生成された電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計測対象である回転軸体の軸線方向および径方向における軸振れ(振動)量を光学的に非接触にて計測可能な軸振れ計測装置に関する。
【背景技術】
【0002】
例えば、水や蒸気の保有するエネルギーを利用してタービンを回転させて発電を行なう発電タービンプラントなどでは、高効率であるとともに、高い運用性および安全性が要求される。特に高速回転するタービンに軸ねじれ、軸たわみ、軸振れなどの変形が生じた場合には、非常に危険な事態を引き起こしかねず、前記のような安全性などを確保するためにも、タービンなどの回転軸体の軸振れなどを定量的に把握し、異常が認められた場合0には所定の対策を確実に講じることが重要であり、そのために簡単かつ高い精度にてこれらを計測可能な計測装置や計測方法が望まれている。これらのうち、軸振れの測定技術については、従来より多くの提案がなされてきているところである。
【0003】
被計測対象である回転軸体の軸振れ計測技術としては、例えば特許文献1において提案されている。この提案は、回転軸を中心として回転する回転体と、直角に折り返された隣り合う反射面を挟角側に有するとともに、該折り返し側が前記回転軸と同軸平行状態となるように前記回転体に設けられた反射鏡と、前記反射鏡に任意の入射方向から光ビームを照射する検出用照射器と、前記光ビームにおける前記反射面から反射された反射光ビームを検出する検出素子とを備えた軸振れ計測装置に関するものである。この計測装置を使用すれば、検出用照射器により反射鏡へ照射する光ビームとその反射鏡からの反射光ビームとが回転体の回転角にかかわらず常に平行となるため、従来のように検出用照射器による光ビームの入射角を考慮しながら位置検出器を配置させた状態での調整が不要となり、光ビームの入射角に依存せずに各構成部の位置関係が決まって調整が楽になる利点がある。
【0004】
また、従来の回転軸体のたわみ測定技術は、例えば特許文献2において提案されている。特許文献1記載の技術は、回転軸体の曲げモーメント測定装置に関するものであり、回転軸体の曲げモーメントを求めるために、当該回転軸体の外周面に取り付けられた円板とその端面に対向して設けられ、当該円板までの距離を測定する距離測定器とを備えており、前記回転軸体の回転中にこれにたわみが生じたことによる前記距離の変化から当該円板の傾き角(前記回転軸体のたわみ角)を求めるようにしたものである。なお、本明細書では、以下、用語「軸振れ」を「軸のたわみ」をも含む意味で使用している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−339620号公報
【特許文献2】特開昭57−12337号公報
【特許文献3】特開2000−205977号公報
【特許文献4】特開2002−333376号公報
【特許文献5】特開2006−84462号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1記載の技術では、回転軸体において軸線方向に生じた軸振れを計測することが困難であるばかりでなく、ある程度のサイズの反射鏡を用いる必要があるので、回転軸体の外周面に設置する反射鏡の数に制限があり、結果として高い精度で軸振れ量を計測するのは困難である。また、特許文献2記載のたわみ計測技術では、直接距離測定器によって回転軸体外周面の円板までの距離を測定するので、回転軸体の軸線方向に直角な方向に軸振れを生じる場合には、当該軸振れを検出するのは困難である。また、回転軸体の軸たわみ角が小さい場合には距離測定器によって非常に微小な距離を測定しなければならず、そのため当該測定器に高い測定精度が必要とされ、結果として距離測定器が高額になってしまうという問題がある。
【0007】
また、特許文献3〜5などで提案されているトルク計測装置は、回転軸体に加えられるトルクを測定するには良好な方法であるが、そもそも回転中に生じる回転軸体の軸振れ量を測定することを想定したものではなく、当該軸振れ量を測定できない。
【0008】
本発明は、前記問題を解決すべくなされたものであり、簡単に回転軸体の軸線方向および当該方向に直角な径方向における軸振れ量を非接触にて測定できる軸振れ計測装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記目的を達成するために、本発明の軸振れ計測装置は、被計測対象である回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が形成されてなる環状の反射パターンと、前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1の光線および第2の光線と、前記各所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じた電気パルス信号を生成し、当該電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の前記外周面に対する照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備えてなることを特徴とする。
【0010】
前記第1の光線または前記第2の光線は、前記反射パターンに照射された前記第2の光線または前記第1の光線が、そこから反射されて光誘導手段によってその光路を変更された反射光として構成することができる。また、前記反射パターンに照射される前記第1の光線および前記第2の光線の入射角は互いに相違する値に設定することができ、そのなかでも前記第1の光線は、前記回転軸体の外周面に対して略直角とされるのが好ましい。
【0011】
前記光反射性部分もしくは前記光非反射性部分、またはこれら双方は適宜の面積を有する領域に形成してもよく、適宜の線幅を有する線状に形成してもよい。また、前記光反射性部分若しくは前記光非反射性部分、またはこれら双方は、それ自体が幅変化部として形成できる。ここで、幅変化部とは、これら各部分またはこれらの双方において前記両部分の配置方向に直交する方向の位置(距離)に応じて前記各部分の当該配置方向における幅(距離)が一定の割合で変化するように構成された部分を指している。すなわち、幅変化部は、これら両方向の位置関係(距離)が1対1に対応しており、いずれか一方の距離の変化が得られれば、他方の距離の変化が必然的に求まるように構成されている。前記光非反射性部分としては、任意の面積を有する領域または適宜の線幅を有する線状に形成されたものなどが含まれる。所定の領域を有する光反射性部分または光非反射性部分を中間にして前記配置方向両側からこれを線状の光非反射性部分または光反射性部分で挟み込むように組み合わせた領域を幅変化部として形成することもできる。
【0012】
前記環状の反射パターンは、前記各光線がそれぞれ照射されるように各別に形成することができる。また、前記反射パターンは、前記回転軸体の外周面に環状に取り付け可能なターゲット体に設けられた少なくとも1つの被照射面に形成することもできる。
【発明の効果】
【0013】
本発明では、被計測対象である回転軸体の外周面にその周方向に幅変化部が形成された環状の反射パターンを設け、これに第1の光線および第2の光線を照射し、これらの反射光をそれぞれまたは重ね合わせた状態で受光して各反射光についての受光、不受光のタイミングの変化から演算により回転軸体の軸線方向および径方向の軸振れ量成分を求めることとしたので、当該回転軸体の回転中に生じた回転軸体の軸線方向および径方向の軸振れ量成分を非接触にて簡単に求めることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の軸振れ計測装置の実施形態の一例を示す図である。
【図2】図1に示す実施形態の一部を変形した変形例を示す図である。
【図3】図1に示す軸振れ計測装置の計測原理を説明する図である。
【図4】図1に示す軸振れ計測装置の計測原理を説明する図である。
【図5】本発明の軸振れ計測装置に用いられる反射パターンの一例を示す図である。
【図6】本発明の軸振れ計測装置に用いられる反射パターンの別の例を示す図である。
【図7】本発明の軸振れ計測装置に用いられる反射パターンのさらに別の例を示す図である。
【図8】本発明の軸振れ計測装置の実施形態の別の例を模式的に示す図である。
【図9】図8に示す軸振れ計測装置の実施形態の変形例を示す図である。
【図10】図8に示す軸振れ計測装置の実施形態のさらに別の変形例を示す図である。
【図11】図8〜図10に示す実施形態の2つの反射パターンの位置関係と、これらから反射する反射光の波形を示す図である。
【図12】図4〜図6の反射パターンを被照射面に備える帯状のターゲット体の一例を示す図である。
【図13】本発明の軸振れ計測装置の実施形態のさらに別の例に適用可能なターゲット体の例を示す図である。
【図14】図13のターゲット体の使用例を示す図である。
【図15】本発明の軸振れ計測装置の実施形態のさらに別の例に適用可能なターゲット体の例を示す図である。
【図16】図15のターゲット体の使用例を示す図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照して本発明の軸振れ計測装置の実施形態について詳細に説明するが、本発明は以下の実施形態に限定されない。なお、以下の各図では、同一または共通の各部については同一の符号を用いて示しており、重複した説明は以下では省略する。
【0016】
実施形態1
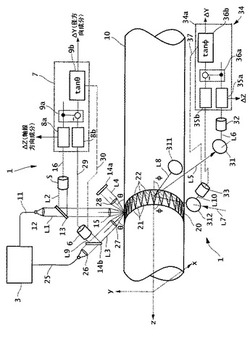
図1は、本発明の軸振れ計測装置の実施形態の一例を示す図である。この図に示す軸振れ計測装置1は、被計測対象である回転軸体10の外周面にその周方向に沿って環状に形成された反射パターン20と、回転軸体10のy軸方向における回転軸体10の軸線方向および径方向の軸振れ量成分をそれぞれ求めるための発光部3および受光・演算部4を備えている。また、図1では、さらに、反射パターン20を共用し、不図示の発光部および受光・演算部34を備えた構成とされ、回転軸体10のx軸方向における軸振れ量を計測するようになっている。回転軸体10のx軸方向については図示を簡略化しているが、これらx軸方向およびy軸方向における各機器はいずれも同じ構成であるものとし、以下では、y軸方向の軸振れ計測についてのみ説明することとする。
【0017】
本実施形態における反射パターン20は、回転軸体10の周方向に光反射性部分21および光非反射性部分22が交互に配置されて帯状に形成されている。反射性部分21および非反射性部分22は、それぞれ同形、同サイズの略直角三角形の平面形状を有し、帯状の反射パターン20の長さ方向(両部分の配置方向)両側の平行な両側縁と、これら両側縁のそれぞれに対して略直角な直線状の境界線(長辺に相当)と、この長辺に相当する境界線と鋭角をなし、かつ当該境界線と前記一方の側縁とを結ぶ直線状の境界線(斜辺に相当)とで画定されて幅変化部として形成されている。なお、以下では、幅変化部としての光反射性部分を単に「反射性幅変化部」といい、幅変化部としての光非反射性部分を単に「非反射性幅変化部」ということとする。そして、反射パターン20は、これら反射性幅変化部21および非反射性幅変化部22をそれぞれ斜辺に相当する境界線を共通にして反対向きに組み合わせたものを1単位とし、その隣り合う単位同士長辺に相当する境界線を共通にして繰り返し配列されている。
【0018】
反射パターン20は、その長さ方向が回転軸体10の周方向に向き、各単位の長辺が回転軸体10の軸線方向に略平行となるように当該回転軸体10の外周面にその周方向に環状に形成される。これにより、回転軸体10の軸線方向の軸振れ量(距離)と、回転軸体10の回転に伴い反射パターン20上をその周方向に走査する反射性幅変化部の幅(反射光の反射時間)とが1対1に対応し、後者を求めれば、簡単な演算により前者が求められるようになる。
【0019】
反射性幅変化部21には、例えば通常のミラーの他、可とう性のある反射ミラーや反射シート、所定形状に塗布して得られる反射性塗料の塗膜などを使用できる。また、非反射性幅変化部22には光非反射性の板状体やシート状体の他、所定形状に塗布して得られる非反射性塗料の塗膜などを使用できる。
【0020】
発光部3としては、連続発光可能な光源を有するものが使用される。この光源としては、各種のレーザー、発光ダイオードまたはランプのほか、これらの1種とレンズ、スリット、ピンホールなどとを適宜組み合わせたものなどを使用できる。好ましくは、これらの光源のうち、指向性のある光線を出射可能な各種レーザーを用いるのがよい。本実施形態では、2条の光線(第1の光線L1および第2の光線L3)をそれぞれ出射可能な構成のものを使用している。ここで、第1の光線L1は回転軸体10の軸線方向における軸振れ量成分計測用であり、第2の光線L3は回転軸体10の径方向における軸振れ量成分計測用である。なお、このような2条の光線を出射可能な発光部3を用いる以外に、例えば1条の光線を出射可能な発光部を2基用いるようにしてもよい。
【0021】
この発光部3には、必要に応じて、図1に示すように、その光線出射口にそれぞれ接続可能な光ファイバーケーブルなどの光伝送手段11、25を用いることができる。このような光伝送手段11、25を用いることで、発光部3を回転軸体10の周囲の任意の位置に設置できる利点がある。図1ではまた、光伝送手段11直後の第1の光線L1の光路上にレンズ12を設置するとともに、光伝送手段25直後の第2の光線L2の光路上にレンズ26を設置し、反射パターン20への照射前に第1の光線L1および第2の光線L3をそれぞれ平行光に整えている。
【0022】
本実施形態においては、第1の光線L1がその光路上斜め45[°]に設置された光誘導手段としてのハーフミラー13を透過して回転軸体10上の反射パターン20に対して略垂直に照射される。第1の光線L1が反射パターン20の所定位置に照射されると、回転軸体10の回転方向に非反射性幅変化部22を横断する間は当該位置からの反射はなく、反射性幅変化部21を横断する間、そこから反射光L2が反射する。この反射光L2は、光線L1と同一の光路を逆方向に進行し、ハーフミラー13によりその光路を直角に曲げられ、受光部5において受光される。なお、受光部5の設置位置によって反射光L2を受光部5で直接受光可能な場合には、このハーフミラー13を設置する必要はない。なお、第1の光線L1の反射パターンへの照射角度は、略垂直に限定されず適宜の角度に設定できるが、精度低下などの問題を考慮すると、略垂直に設定するのが好ましい。この照射角度を略垂直以外の適宜の角度に設定する場合には、精度低下を抑制するために必要に応じてレンズなどを用いた光線の調光を行うなどの配慮が必要となる。
【0023】
また、第2の光線L3は、反射パターン20上、前記第1の光線と実質的に同じ照射位置に入射角(90−θ)[°]で照射される。ここで、θは回転軸体10の軸線方向の外周面に対する光線L3の照射角を示している。この第2の光線L3も第1の光線L1と同様に、回転軸体10の回転方向に非反射性幅変化部22を横断する間は当該位置からの反射はなく、反射性幅変化部21を横断する間、そこから反射光L4が反射角(90−θ)[°]で反射する。この反射光L4は、受光部6において受光される。
【0024】
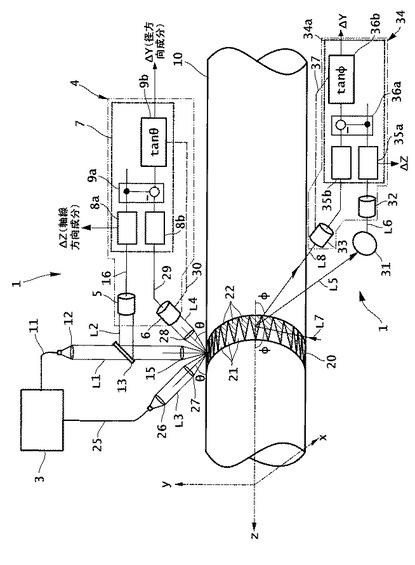
この第2の光線L3およびその反射光L4は、例えば1枚または複数枚の反射ミラー(反射面を備えていればその他の板材料(反射材)であってもよい。以下、「反射ミラー」という場合、このような反射材も含んでいるものとする。)やハーフミラーをそれぞれ組み合わせて用いることで、受光部6に至るまで図1の場合とは異なる光路を適宜変更することができる。図2は、このようにして第2の光線L3およびその反射光L4の光路を変更した変形例を示している。なお、この図においても、x軸方向およびy軸方向の双方の軸振れ量を計測するようにそれぞれの方向に機器を配置しているが、図1の場合と同様に、y軸方向の軸振れ計測についてのみ説明することとする。また、図2におけるその他の構成については、図1に示す実施形態におけるものと本質的に変わるところはない。
【0025】
図2の例では、反射ミラー14aおよびハーフミラー14bを各1枚用い、前者は反射光L4の光路に対して直角に設けられ、ハーフミラー14bは第2の光線L3の光路に対して斜め45[°]となるように設けられている。反射パターン20の所定位置に所定の入射角で第2の光線L3が照射されると、反射パターン20の反射性幅変化部21を横断する間、そこから反射する反射光L4は反射ミラー14aにより再び反射され、その光路を逆行し、さらに反射パターン20で反射する。この反射光L9は、光線L3の光路上を逆行し、ハーフミラー14bによって実質的に直角な方向にその光路が変更され、受光部6において受光される。このような構成とすることで、回転軸体10の軸振れが大きく、反射光L4の平行移動がレンズ28に収まらないため、結果として計測不能となるのを防止することができる。
【0026】
本発明における受光部5,6は、前記した断続的な反射光L2、L4を受光し、その受光、不受光のタイミングに応じて光電変換により受光エネルギーに相当する所定の大きさの電気信号を出力するように構成されている。このような受光部5,6としては、受光(光電変換)素子、またはこれらを含んだ受光機器などが好適に使用できる。ここで、受光素子の具体例としては、例えばフォトダイオード、フォトトランジスタ、フォトマルチメータなどが挙げられる。また、受光機器の具体例としてはCCDカメラなどの撮像装置などが挙げられる。受光部5は、図1に示すように2条の光線をそれぞれ受光可能な構成であってもよく、1条の光線のみを受光可能な構成であってもよい。また、必要であれば、1つの受光部5に前記例示の受光素子を複数組み込んでさらに複数条の光線を受光でき、それぞれの受光エネルギーの大きさに応じた電気信号を出力可能な構成であってもよい。
【0027】
演算部7は、図1に示すように、それぞれ回転軸体10の軸線方向の軸振れ量成分△Zを求める第1演算系統および径方向の軸振れ量成分△Yを求める第2演算系統を有している。第1演算系統は、演算器8aを含んでいる。また、第2演算系統は、演算器8b、減算器9aおよび乗算器9bを含む一連の信号ラインを有している。ここで、演算器8a、8bは、回転軸体10の軸線方向の距離と反射性幅変化部をその配置方向に横断する光線の走査距離(反射光の反射時間、ひいては電気パルス信号の各パルス幅に相当。)との関係に基づいて、回転軸体10に軸振れが生じた場合には、光線の走査距離(反射光の反射時間)の変化から回転軸体10の軸線方向の軸振れ量成分を算出するために所定の演算を行う機能を備えた機器を指している。また、減算器9aは2つの入力の減算機能を備えた機器であり、乗算器9bは、2つの入力を乗算し、またはあらかじめ設定されている定数と入力とを乗算する機能を備えた機器である。なお、演算部7では、さらに回転軸体10の回転数信号の入力を受けるようにし、そのばらつきから回転軸体10の回転速度が一定であるか否か(所定の回転速度の範囲内にあるか否か)を判定するようにしてもよい。なお、本明細書では以下、回転軸体の「回転」は、一定速度範囲での回転を指すものとする。
【0028】
なお、図1では、乗算器9bに入力される正接値tanθは、それぞれ受光部6が反射光L4の回転軸体10の外周面に対する反射角θを読み取って演算を行い、信号線30を介してそれぞれ乗算器9bに送出されるように構成されているが、このような構成には限定されない。例えば、回転軸体10の回転に伴う軸振れによって軸線の水平方向とのなす角度が非常に小さく無視できる場合などには、光線の入射角および反射角は略一定となるので、乗算器9bに予め公知の方法により一定値として入力しておくこともできる。また、演算部7は、表示部を有していても良く、その場合、回転速度(回転周期)などの他の情報を演算、表示可能なものであってもよい。このような演算部7は、CPUや記憶装置を含む公知の構成を用いることができる。電気信号の入力から前記各演算に至る一連の演算制御は、前記記憶部(不図示)に予め格納された設定プログラムを実行することによって行うことができる。また、この記憶部には受光部5からの電気信号にノイズなどの影響により異常が生じた結果、軸振れ量の計測結果に異常値が含まれる場合に当該異常値を廃棄するように実行されるプログラムも含めることができる。
【0029】
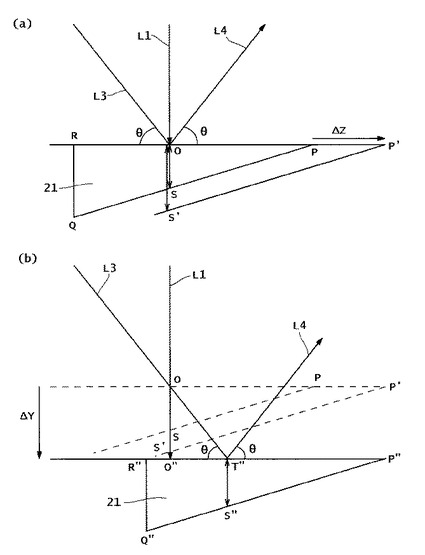
次に、図3および図4を参照して本実施形態の軸振れ計測装置の使用方法および計測原理について説明する。図3(a)は、図1に示す回転軸体10の外周面における反射パターンの同一の照射位置に対して第1の光線L1が垂直に照射されるとともに、第2の光線L3が入射角(90−θ)[°]で照射されているものとする。回転軸体10の回転に伴い反射性幅変化部21も回転運動し、第1の光線L1および第2の光線L3はそれぞれ反射性幅変化部21のOS線上を走査し、その間そこから反射光L2およびL4が反射される。これらの反射光L2(反射時間)およびL4(反射時間)は、受光部5,6で受光され、光電変換により、それぞれの反射光の受光、不受光に対応する電気パルス信号に変換され、当該信号のパルス幅の基準値(または反射時間の基準値)が求められる。それとともに、演算器8a、8bにはそれぞれ反射性幅変化部21を横断する光線の走査距離(反射時間)と回転軸体10の軸線方向の距離との間の関係から、距離OPが求められる。これらの演算結果は、それぞれ演算部7内の所定の記憶部に格納される。
【0030】
回転軸体10の回転に伴う軸振れは軸線方向および径方向の軸振れ量成分の合成値として把握できるので、回転軸体10が軸線方向に軸振れし、その後に径方向に軸振れしたものとし、前記各軸振れ量成分を算出する方法について説明する。まず、回転軸体10が軸線方向、図3の左から右に向って△Zほど軸振れを生じ、これにより、反射性幅変化部21は頂角PがP’の位置まで移動したと仮定する。この場合、第1の光線L1および第2の光線L3は反射性幅変化部21のOS’線上を走査することになり、その結果、回転軸体10に軸線方向の軸振れが生じていない場合よりもより反射時間の長い反射光L2およびL4が反射される。受光部5,6では、これらの反射光L2及びL4を受光し、それぞれの反射光L2およびL4の受光、不受光に対応して生成された電気パルス信号が演算部7に入力される。演算器8a、8bにはそれぞれ反射性幅変化部21を横断する光線の走査距離(反射時間)と回転軸体10の軸線方向の距離との間の関係が記憶されているので、基準値に対する距離OPと、パルス幅OS’に対する距離OP’とがそれぞれ得られる。そして、これらのから、次式(式1)にしたがい、△Zが求められる。
【0031】
【数1】

式1中、
は、それぞれの線分OP、OS、OS’の長さを、またt11およびt12は反射光の反射時間を指している。
【0032】
回転軸体10に軸線方向逆方向に軸振れが生じた場合にも、同様の方法により△Zを求めることができる。このように、回転軸体10に軸線方向にのみ軸振れが生じている(径方向の軸振れが生じていない)場合には、演算部7、34でそれぞれ演算器8a、8bの演算結果及び演算器35a、35bの演算結果は同値となるため、減算器9a、36aでの演算結果はいずれも0となり、結果として△Y=0となる。
【0033】
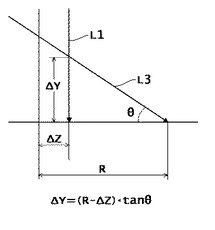
次に、回転軸体10が前記軸線方向に軸振れしている状態から径方向に△Yだけ軸振れを生じたものとする。このとき、図3(b)に示すように、第1の光線L1はO”にて、また第2の光線L3はT”にて回転軸体10の外周面における反射性幅変化部21に照射されることになる。第2の光線3の光路は固定状態とされ、当該光路の回転軸体10の外周面に対する角度はθで維持されるものとする。また、この場合、回転軸体10は軸線方向にさらに軸振れを起こしていないので、第1の光線L1の反射光に対応する電気信号が演算器8aに入力されることで、回転軸体10の軸線方向の軸振れ量成分の演算結果は△Zのままとなる。それに対して、第2の光線L3は反射性幅変化部21のT”S”線上を走査することになるので、そこでの反射光L4はT”S”の線分に対応する反射時間だけ受光部6で受光され、それに対応する電気信号が演算器8bに入力されることで、演算器8a、8bにて演算結果が異なってくる。減算器9aにおいて演算器8bの演算結果から演算器8aの演算結果を減算し、さらに乗算器9bで正接値tanθを乗ずることで、△Yを求めることができる。
【0034】
具体的には、図3(b)において、線分OO”の長さは△Yであり、三角形OO”T”における線分O”T"の長さは、次式(式2)で求められる。
【0035】
【数2】
また、回転軸体10の軸線方向および径方向の双方の軸振れに起因する軸線方向の軸振れ量成分の合計をRとすると、このRは上式(式2)を用いて以下式(式3)にように表わされる。
【0036】
【数3】
この式3を変形することで、△Yは以下の式(式4)のように求めることができる。
【0037】
【数4】
【0038】
本実施形態の軸振れ計測装置についての以上の計測原理の説明をまとめたものを図4に示す。第2の光線L3については、回転軸体10の軸線方向の軸振れ量成分△Zおよび径方向の軸振れ量成分△Yの双方をそれぞれ演算で求めるため、図3および式4に示すように、演算器8bにおける軸線方向および径方向の双方を加味した軸振れ量の演算結果(R)から、回転軸体10の軸線方向の軸振れ量成分(△Z)を減じ、得られた結果に正接値(tanθ)を乗ずることで、回転軸体10の径方向における軸振れ量成分(△Y)を求めることができる。なお、回転軸体10が図3に向って右から左に向って△Zほど軸線方向の軸振れを生じた場合については説明を省略するが、この場合にも上式(式4)により同様に求めることができる。
【0039】
このようにして得られる演算結果は、演算部7が所定の表示部を備えている場合には当該表示部で表示され、またこれらの演算結果が制御に用いられる場合には、相手方の制御機器に有線または無線にて送信することができる。
【0040】
[反射パターンのバリエーション]
図1に示した反射パターン20は、反射性幅変化部21および非反射性幅変化部22を備えた構成であるが、これらの幅変化部は同図に示した同形、同サイズの略直角三角形の平面形状を有するものに限定されない。例えば、これらの幅変化部21,22は、二等辺三角形などを含む山形形状の略三角形や略台形などの平面形状のなかからも適宜選択できる。また、反射性幅変化部21の平面形状と非反射性幅変化部22のそれとは、互いに異なるように選択でき、例えば一方を略三角形状などとし、他方を略台形形状などとすることもできる。また、これらの平面形状のなかから選択した隣り合う幅変化部の斜辺および長辺にそれぞれ相当する共通の境界線を、例えば2次関数や指数関数で表わされる曲線状とすることもできる。
【0041】
反射パターンはまた、反射性幅変化部および非反射性幅変化部の組合せからなる構成に限定されず、第1および第2の2条の光線の反射パターン上での照射位置が実質的に同じか否かなどによってさらに多くのバリエーションを採用できる。図5〜図7は、そのような反射パターンのバリエーションの幾つかの例を示している。
【0042】
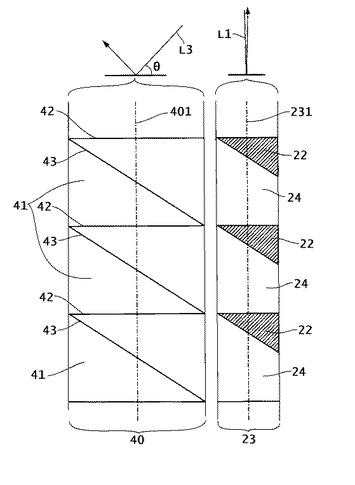
図5に示す反射パターンの例では、その長さ方向に沿って2条の光線の照射ゾーン(以下、単に「ゾーン」という。)23、40がそれぞれ個別に併設されている。ゾーン23は、図1に示した直角三角形の平面形状を有する非反射性幅変化部22と、その斜辺を共通にして反対向きに配置した台形の平面形状を有する反射性幅変化部24との組合せを1単位とし、この単位を反射パターンの長さ方向に繰り返し配置したものである。
【0043】
また、ゾーン40は、反射パターンの全長にわたり少なくともこのゾーンの幅で光反射性を備える領域に、該反射パターンの幅方向に形成された直線状の非反射性部分(以下、この部分を「非反射性区画線」と呼ぶこととする。)42と、隣り合う非反射性区画線42,42の一端同士を斜めに連結するように形成された直線状の非反射性区画線43とが鋸刃状に配置されたものである。この鋸刃状の配置は、図5に示すように、反射パターンの長さ方向に繰り返し形成されているのが好ましい。また、複数の鋸刃状の配置によって囲まれた個々の光反射性部分41は互いに同形、同サイズの幅変化部として形成され、その配置方向に均等な間隔で配置される。
【0044】
反射パターン40の長さ方向における非反射性区画線43のピッチは、反射パターン20における各単位の配置方向における長さ(繰り返しピッチ)よりも大きく設定することが好ましい。本実施形態においては、後述するように、各反射パターン23、40からの反射光を受光部にて受光し、それぞれの受光、不受光のタイミングを求めるのに好都合だからである。なお、本実施形態では、非反射性区画線42、43を直線状とするが、2条の非反射性区画線42,43によって区画される光反射性部分が幅変化部として形成されれば、前記非反射性区画線42,43のうちの一方または双方は曲線であってもよい。
【0045】
この例の反射パターンを回転軸体10の外周面にその周方向に形成する場合には、非反射性区画線42、43のうちの一方は、回転軸体10の径方向に実質的に一致させることが好ましい。この反射パターンの例では、ゾーン23の幅方向略中央領域の所定位置(例えば、図5中、符号231で示した1点鎖線上の任意の点)に第1の光線を照射することができる。この場合、回転軸体10の回転に伴い、第1の光線はこのゾーン23の1点鎖線231上を走査することになる。また、第2の光線は、ゾーン40の幅方向略中央領域の所定位置(例えば、図5中、符号401で示した1点鎖線上の任意の点)に照射することができる。この場合にも、回転軸体10の回転に伴い、第2の光線はこのゾーン40の1点鎖線401上を走査することになる。
【0046】
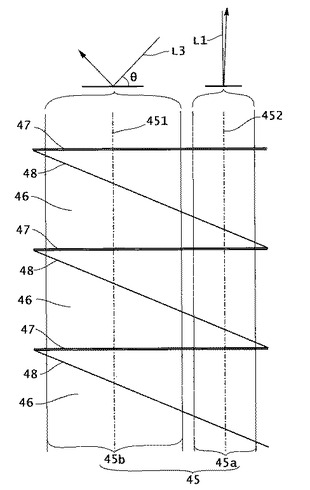
図6および図7は、反射パターンのバリエーションの更に別の例を示している。これらのバリエーションは、1の反射パターンの2つの異なる位置にそれぞれ第1および第2の光線を照射するような場合に用いられるものである。図6に示す反射パターン45の例では、帯状の反射パターン45の被照射面全面が光反射性とされており、そこに幅方向に互いに略平行に設けられた二重線状の非反射性区画線47,47、・・・と、隣り合う非反射性区画線47、47の一端同士を斜めに連結するよう設けられた非反射性区画線48とが鋸刃状に配置されている。この鋸刃状の配置は、図6に示すように、反射パターン45の長さ方向に繰り返し形成されるのが好ましい。なお、二重線状の非反射性区画線47は、必要であれば、回転軸体10の回転運動の基準点などとして、また回転速度や角速度を求めるのに用いることができる。
【0047】
この反射パターン45では、その長さ方向に第1および第2の2条の光線をそれぞれ照射する2つのゾーン45a、45bが設定される。ゾーン45aは、その幅方向略中央領域に略垂直に第1の光線が照射される領域であり、回転軸体10の軸振れが生じていない場合には、当該光線が走査線452上を走査するようにする。また、ゾーン45bは、その幅方向略中央領域に第2の光線が入射角(90−θ)[°]で照射される領域であり、回転軸体10に軸振れが生じていない場合には、当該光線が走査線451上を走査するようにする。
【0048】
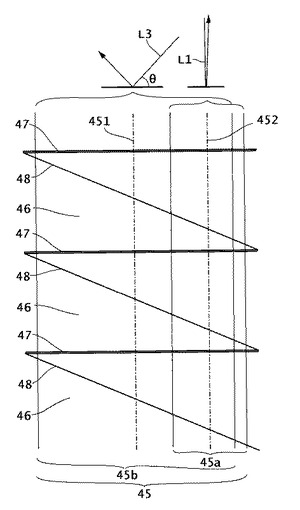
また、図7に示す反射パターン45の例では、図6に示す反射パターンにおいてその幅方向にゾーン45a、45bのそれぞれをこれらが一部重複するように互いに接近させて設定している。それ以外の構成については、図5に示すものと本質的に変わりはない。この図7に示す反射パターン45の場合、各ゾーン45a、45bをこのように重複して配置することで、図6に示した場合よりも反射パターン45の幅3を小さく設定できる利点がある。
【0049】
図5〜図7に示す反射パターンにおける各ゾーンの幅(計測範囲)は、以下のようにして算定することができる。この算定方法を図6に示す反射パターン45を例にとり説明する(図3及び図5に示す例でも同様である。)。なお、説明の便宜上、第1および第2の各光線はそれぞれ、回転軸体10の回転中に軸振れが生じていない場合、反射パターン45の1点鎖線451、452上を走査するものとする。
(1)第1の光線が垂直に照射される反射パターンのゾーン45aの幅
回転軸体10の軸線方向のいずれか一方向に軸振れが生じた場合に予想される最大軸振れ量をlV(反対方向に対しては−lV)とすると、このゾーン45aにおける計測範囲は±lVで表わされ、ゾーン45bの幅は2lvとなる。したがって、好適には、ゾーン45bの幅は2lV以上に設定するのがよいことが分かる。なお、ここでは、反射パターンに第1の光線を垂直に照射する場合について説明するが、第1の光線を垂直(入射角0[°])以外の入射角で反射パターン45に照射した場合にも同じ結果が得られることはいうまでもない。
(2)第2の光線を所定の角度で斜めに照射する場合の反射パターンのゾーン45bの幅
回転軸体10の径方向内外いずれかの方向に生じうる最大軸振れ量をlH(反対方向に対しては−lH)とした場合、回転軸体10の軸線方向および径方向の双方に軸振れが生じた場合の一方向における照射位置の走査線451からの最大移動距離は、前記(1)を加味すると、(lV+lH・cotθ)によって求められる。よって、計測範囲は、±(lV+lH・cotθ)で求められ、したがって、ゾーン45bの幅は2(lV+lH・cotθ)以上に設定することが好ましい。
【0050】
実施形態2
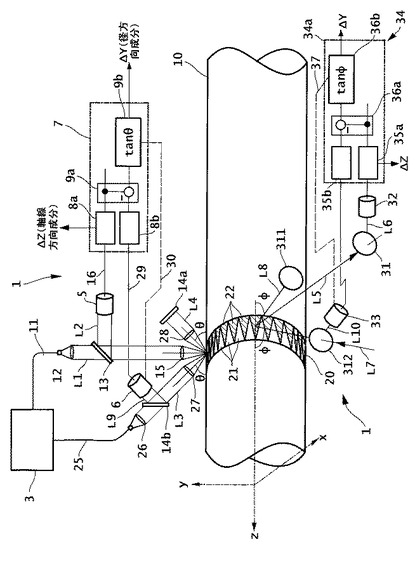
図8は、本発明の軸振れ計測装置の実施形態の別の例を示す図である。回転軸体10の外周面には、図5に示した反射パターン23、40が回転軸体10の軸線方向に所定の距離だけ離してそれぞれ形成されているものとする。なお、以下に示す各図では、演算部7およびこれと受光部5との信号のやり取りについては図1に示す実施形態と共通であり、また光伝送手段などは必須の構成ではないので、これらの機器及び信号線については図示を省略している。本実施形態では、1の発光部3から出射された1の光線を回転軸体10の外周面におけるいずれか一方の環状の反射パターンに照射し(照射位置については前記のとおり。)、そこからの反射光をハーフミラー50,51や反射ミラー52などからなる光誘導手段によって誘導して、他方の環状の反射パターン40を照射するように構成されている。なお、反射パターン20は、実施形態1と同様の構成のものを用いることとしている。また、図8において、説明の簡略化のために、θ=45[°]としている。
【0051】
光誘導手段におけるハーフミラー50は、光線L11がこれに垂直に照射されるように配置されている。また、ハーフミラー51は、ハーフミラー50との組み合わせが逆くの字状を呈するようにハーフミラー50の下端側にこれとは直角な向きに配置されている。また、反射ミラー52は、光線L11が反射パターン40に照射され、そこから角度θ=45[°](反射角と一致)で反射する反射光L12の光路上にこれに垂直に配置固定される。
【0052】
本実施形態によれば、発光部3から出射された光線L11はハーフミラー50をこれに垂直に透過し、反射パターン40にθ=45[°](入射角に一致)で照射され、当該反射パターン40の非反射性区画線42,43を除いた反射性部分41を走査する間に反射光L12として反射され、反射ミラー52に垂直に照射されるように進行する。そこで反射された反射光L13は光線L12の光路を逆行し、反射パターン40における光線L11の照射位置に照射され、反射性部分41を走査する際に反射される反射光L14が光線L11とは反対側からハーフミラー50に照射され、略鉛直方向下方に反射光L15が反射される。反射光L15は、反射パターン20に略垂直に照射され、そこで反射性幅変化部21上を走査する間反射する点滅反射光L16は光線L15の光路を逆行する。この点滅反射光L16はハーフミラー51で直角に反射され、受光部5において受光される。
【0053】
受光部5では、光電変換によって点滅反射光L16の受光、不受光のタイミングに応じた電気パルス信号を不図示の演算部に出力する。この演算部は、これへの入力信号線路において入力される電気信号が分岐され、第1演算系統および第2演算系統にそれぞれ入力されるように構成されている点で異なるが、その他の構成については図1に示したものと本質的に変わりはない。この演算部では、前記したように、実施形態1の場合と同様な演算処理が行われ、回転軸体10の軸線方向の軸振れ量成分△Zおよび径方向の軸振れ量成分△Yが求められる。
【0054】
図9は、図8に示した本発明の軸振れ計測装置の実施形態において、光線が照射する反射パターンの順を入れ替えた一変形例を示している。この図に示す実施形態は、図8に示す実施形態2より発光部3、受光部5および光誘導手段50、51の配置を変更したものであり、それ以外は本質的に変わるところはない。また、この図に示す実施形態においても、実施形態2の場合と同様に説明を簡略化するために、θ=45[°]とする。
【0055】
本変形例では、回転軸体10の外周面に対して光線を垂直に照射する位置に発光部3が配置され(前記のように光伝送手段を用いる場合には、発光部3の位置はこの位置に限定されない。)、そこからの光線L11の光路上にこれに対して斜め45[°]となるようにハーフミラー50が配置されている。また、ハーフミラー50からの反射光L13の反射パターン40に向けた光路上には、これに対して斜め45[°]となるようにハーフミラー51が配置されている。なお、反射ミラー52の固定位置については、図8に示した実施形態と同様である。
【0056】
発光部3からの第1の光線L11は、ハーフミラー50を透過して反射パターン23の幅方向略中央の照射位置に垂直に照射され、回転軸体10の回転に伴い当該照射位置を回転方向に走査し、反射性幅変化部24上を走査する際に反射される。この反射光L12は光線L11の光路上を逆行し、ハーフミラー50において反射光L13としてこれに垂直に反射される。反射光(第2の光線に相当)L13は、ハーフミラー51を透過し、反射パターン40の幅方向略中央の照射位置に45[°]の入射角で照射される。反射パターン40では、非反射性区画線42,43を横断するとき以外は、反射角45[°]で反射された反射光L14が、反射ミラー52にて折り返されるように反射される。この反射光L15は、光線L14の光路を逆行し、反射パターン40の反射性領域41を走査する間に反射され、さらに点滅状態の点滅反射光L16となる。点滅反射光L16は、ハーフミラー51によって直角に反射し、受光部5において受光される。受光部5において光電変換により点滅反射光の受光、不受光に対応した電気パルス信号は二分され、不図示の演算部に入力され、そこで前記方法と同様の方法により回転中の回転軸体10の軸線方向および径方向における軸振れ量の各成分を求めることができる。
【0057】
図10は、図8および図9に示した本発明の軸振れ計測装置の実施形態の別の変形例を示しており、光誘導手段としてハーフミラー50と反射ミラー52とを各1個用いることとした以外は、図8および図9に示した例と本質的に変わりはない。この図に示す例でも、回転軸体10の外周面に形成された2種類の反射パターンのいずれに光線を先に照射してもよいことを示している。
【0058】
図10に示した例では、回転軸体10の外周面に対して光線を垂直に照射する位置に発光部3が配置され、そこからの光線L11の光路上にこれに対して斜め45[°]となるようにハーフミラー50が配置されている。また、ハーフミラー50からの反射光L13が入射角45[°]で反射パターン40の所定の照射位置に向けた光路上にこれに対して斜め45[°]となるように配置されている。また、反射ミラー52は、反射光L13の反射パターン40から反射角45[°]で反射する反射光L14の光路に対して垂直に配置固定されている。図10に示した2つの例についての光路などを以下簡単に説明する。
【0059】
図10(a)の例では、まず発光部3からの光線(第1の光線)L11はハーフミラー50を透過して反射パターン23に略垂直に照射され、そこからの反射光L12がハーフミラー50反射され(反射光L13)、反射パターン40の走査線401上に第2の光線として45[°]の入射角で照射される。反射パターン40では、非反射性区画線42,43上を横断するとき以外は、反射光L14が反射角45[°]で反射される。この反射光は、反射ミラー52およびハーフミラー51を経て受光部5によって受光される。
【0060】
図10(b)は、図10(a)に示した実施形態と同様の反射パターンおよび光誘導手段(50、51)を回転軸体10に対して同様に配置した実施形態において、発光部3からの光線(第1の光線)L11をまず反射パターン40の走査線401上に照射し、次いでその反射光を反射パターン20に照射するように構成したものである。具体的な説明については、前記と重複するところもあり煩雑となるので、説明を省略する。
【0061】
図11は、図8および図10(b)に示した実施形態において、回転軸体10の軸線方向の各反射パターンの回転方向の位置関係と、当該反射パターンからの反射光の波形を示したものである。この図において、(a)は、鋸刃状の反射パターン40の長辺と他方の反射パターン23の長辺とが回転軸体10の同一の軸線方向に一致した構成であり、(b)は鋸刃状の反射パターン40の長辺と他方の反射パターン23の長辺とが回転軸体10の軸線方向にすれている構成である。図11(c)、(d)はそれぞれ発光部からの光線の波形であり、(e)、(f)は、反射パターン40からの反射光の波形である。また、(g)、(h)は、反射パターン40および反射パターン23からともに反射された反射光の波形である。なお、図9および図10(a)に示した実施形態の場合、図11(e)、(f)の波形には反射パターン23からの反射光のそれを示す必要があるが、(g)、(h)については共通となることはいうまでもない。
【0062】
図11(a)における2つの反射パターンの位置関係では、光線が反射パターン40の走査線401上を走査し、非反射性区画線42,43をそれぞれ横断する際には反射されず、同図(e)に示すように、波形にはこれらの区画線の横断に対応して短時間の不通電部分がt1時間ごとに周期的に現れる。続いて、このような波形を有する反射光が反射パターン23に照射され、回転軸体10の回転に伴い走査線231上、交互に繰り返される反射性幅変化部21と非反射性幅変化部22とを順次横断するように走査する。非反射性幅変化部22を横断する際には反射されないので、結果として、図11(g)の波形に示すように、周期t1にて現れる不通電部分に1つおきに非反射性幅変化部22によって生じる不通電部分が重ね合される。このとき、重ね合わされる不通電部分の立下りと非反射性幅変化部によって生じる不通電部分のそれは、時間的に一致する。
【0063】
一方、図11(b)における2つの反射パターンの位置関係では、光線が反射パターン40の走査線401上を走査し、同図(f)に示すように、波形には短時間の不通電部分がt1時間ごとに周期的に現れる。続いて、このような波形を有する反射光が反射パターン23に照射され、走査線231上を交互に繰り返される反射性幅変化部21と非反射性幅変化部22とを順次横断するように走査する。非反射性幅変化部22を横断する際には反射されないので、結果として、図11(h)の波形に示すように、周期t1にて現れる不通電部分を1つおきに非反射性幅変化部22により生じる不通電部分が完全に覆うように重ね合される。このとき、重ね合わされる不通電部分の立下りと非反射性幅変化部によって生じる不通電部分のそれは、時間的に一致しない。
【0064】
[ターゲット体の種々の形態]
反射パターンは、回転軸体10の外周に嵌装可能なターゲット体(基材)を用い、これを回転軸体10に嵌装した場合に外部から光線を照射できる少なくとも1つの被照射面上に形成することができる。ターゲット体の被照射面は、その回転軸体10の軸線方向に沿った断面にて、当該軸線に対して適宜の角度で形成されたものであればよい。ここで、「少なくとも1つの被照射面」とは、前記反射パターンが各光線が各別に照射されるように形成されている場合に、それらを1つの被照射面に、または複数の被照射面に各別に形成することができることを意味している。
【0065】
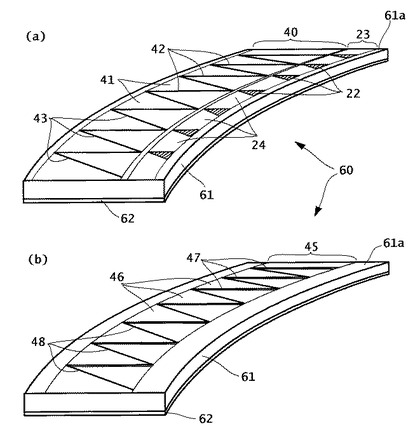
このようなターゲット体としては、例えば、回転軸体に周方向に巻回可能な程度の可とう性を備え、適宜の厚さを有する帯状体や筒状体のほか、当該回転軸体に直接嵌装可能な種々の形状の環状体や鍔状体などが挙げられる。図12は、帯状または筒状のターゲット体の幾つかの具体例を示している。この図に示すいずれの帯状のターゲット体の具体例についても、その長さ方向が図に向って手前から奥へ向かう方向となっている。また、これらのターゲット体60は、いずれも接着層62を備えた基部61の当該接着層62とは反対側の面を被照射面とされている。その幅方向中央領域には、図12(a)のターゲット体60の例では、図5に示したもの同様の形状の反射パターン45が、また図12(b)の例には、図6に示したものと同様の形状の反射パターン23、40が反射パターンがターゲット体60の長さ方向に形成されている。
【0066】
反射パターン23における反射性幅変化部24もしくは非反射性幅変化部22またはその双方は、光反射性または光非反射性の素材を適宜裁断し、貼付(接着)、埋め込み、溶接などの手段により、または光反射性や光非反射性の塗料組成物などを塗布することにより被照射面の所定の位置に形成することができる。また、反射パターン40、45における反射性部分(反射性領域)41、46や非反射性区画線42,43;47,48についても前記と同様の手段により各ターゲット体60の被照射面に形成することができる。また、回転軸体10が光沢のある金属材料などで形成され、外周面が光反射性を備えている場合には、透明なシート状の基部61の被照射面61aに非反射性幅変化部22や非反射性区画線42,43;47,48を配置することで、反射パターンを形成するようにしてもよい。またこれとは反対に、回転軸体10の外周面が光非反射性である場合には、前記とは逆に反射性幅変化部24、24、・・・や反射性部分41,41、・・・;48,48、・・・を透明なシート状の基部表面に配設して反射パターンを形成するようにしてもよい。
【0067】
実施形態3
図13は、本発明の軸振れ計測装置に適用可能な環状のターゲット体の別の具体例の一部を示している。この図に示すターゲット体60は、2つの帯状部材をこれらのなす角度が鋭角となるようにその一側縁同士を当接接合した略L字状をなし、その一方の外面に接着層62が設けられている。この図に向かって手前から奥へ向かう方向がこのターゲット体の長さ方向に相当する。ターゲット体60の鋭角に向き合う内面はそれぞれ被照射面61a,61bとされている。図13(a)に示すターゲット体の例では、その長さ方向に沿ってこれら各被照射面61a、61bに反射パターン65、68がそれぞれ設けられている。また、図13(b)の例では、この2つの反射パターン65、68は、接着層62を備えた側の基部の被照射面61aに長さ方向に沿って併設されており、他方の被照射面61bは反射面とされている。2つの反射パターン65、68はそれぞれ、図12(a)に示した反射パターン23、40と同様の形状であるので、説明を省略する。反射パターン23、40が形成された被照射面61aまたは61bにおいて、これらの反射パターン23、40を除く部分は反射性であると非反射性であるとを問わない。
【0068】
図14は、図13(a)または(b)に示したターゲット体60を回転軸体10に取り付け、本発明の軸振れ計測装置として使用する場合の使用状態を示す図である。図13(a)に示した例の場合、反射光L14が被照射面61bに形成された反射パターン65に略垂直に照射され、図13(b)に示した例の場合には、反射光L13が被照射面61aに形成された反射パターン65に入射角(90−θ)[°]で照射されることになる。本実施形態の使用状態については、図10(a)に示した形態における反射ミラー52を、上方に鋭角に延在し、被照射面61bを備える基部61の一部に変えたのみであり、その他の構成については本質的に変わりはないので、その説明を省略する。受光部5では、点滅反射光L16を受光し、その受光、不受光に応じて生成される電気パルス信号が二分された上で、不図示の演算部にそれぞれ入力され、前記計測原理にしたがい回転軸体10の軸線方向および径方向の軸振れ量成分が求められる。
【0069】
実施形態4
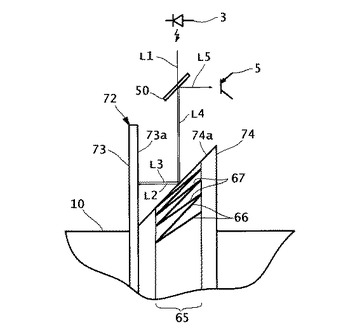
図15は、本発明の軸振れ計測装置に適用可能なターゲット体の別の具体例を示しており、(a)および(b)はこれをそれぞれ図に向かって左方向および右方向から回転軸体10の軸線方向に沿って見た斜視図である。この図に示すターゲット体は、回転軸体10の径方向に延設され、回転軸体10の軸線方向に直交する被照射面73aを有する鍔状部73と、回転軸体10に嵌装可能であり、回転軸体10の軸線方向に沿って被照射面73aの付け根から離隔する方向に連続的に拡径され、45[°]の傾斜の斜面を有する円錐筒状を呈し、その斜面に全周にわたり被照射面74aが形成された円錐鍔状部74とからなる。被照射面73aには、回転軸体10の回転中心を共通にし、当該回転軸体10よりも大径の同心円に沿って反射性幅変化部69と非反射性幅変化部70とが交互に繰り返し配置された反射パターン68(図13における反射パターン68と同様の構成である。)が形成されている。また、円錐斜面である被照射面74aには、光反射性の領域にその周方向に沿って非反射性区画線66,67が鋸刃状に繰り返し配置された反射パターン65(図13における反射パターン65と同様の構成である。)が形成されている。
【0070】
図16は、図15に示したターゲット体を本発明の軸振れ計測装置に適用した場合の使用状態を示す図である。この図に示すように、発光部3から出射された第1の光線L1は、光路の途中に当該光路に対して斜め45[°]に固定されたハーフミラー50を透過し、被照射面74aにおける反射パターン65の幅方向略中央位置に斜面に対して45[°]の角度にて照射される。回転軸体10とともにこのターゲット体が回転運動し、第1の光線L1はそれぞれの非反射性区画線66,67を横断する間は反射せず、それ以外の領域を走査する間、そこから反射する反射光L2は、鍔状部73の被照射面における反射パターン68の幅方向略中央位置に垂直に照射される。この反射パターン68では、光線が非反射性幅変化部73を走査する間は反射せず、反射性幅変化部69上を走査する間反射され、反射光L2の光路上を逆行し、再度反射パターン65において反射され、第1の光線L1の光路上を逆行し、ハーフミラー50によってその光路が直角に変更され、受光部5にて受光されるようになっている。受光部5では、点滅反射光の受光、不受光に応じた電気パルス信号を出力し、これを二分して演算部に入力することで、前記したように回転軸体10の回転中における軸線方向および径方向の軸振れ量成分が求められる。
【産業上の利用可能性】
【0071】
本発明の軸振れ量計測装置は、電動機などの回転機などが備える回転軸体から、発電プラントなどにおけるタービン軸に至る広範な回転軸体の軸線方向および径方向の軸振れ量、さらには軸ねじれ量を計測するのに有効に使用できる。
【符号の説明】
【0072】
1 軸振れ計測装置
3 発光部
4 受光・演算部
5、6、30、32 受光部
7、34 演算部
8a、8b、35a、35b 演算器
9a、36a 減算器
9b、36b 乗算器
10 回転軸体
11、25 光伝送手段(光ファイバーケーブル)
12、26 レンズ
13、14b、31、311、50、51 ハーフミラー
14a、312 反射ミラー(反射材)
15,27、28 集光レンズ
16、29、30 信号線
20、23、40、45、65 反射パターン
21、24 反射性幅変化部
22 非反射性幅変化部
41、46 反射性領域(被照射面)
42、43、48、66、67 光非反射性区画線
45a、45b ゾーン
47 二重線状の光非反射性区画線
50、51 ハーフミラー
52 反射ミラー(反射材)
60、72 ターゲット体
61 基材
62 接着層
73、74 鍔状部
73a、74a 被照射面
L1〜L10 光線(または反射光)
L11〜L17 光線(または反射光)
R 回転軸体の軸線方向の軸振れ量成分の合計値
θ 回転軸体の外周面に対する第2の光線の照射角度
△Y 回転軸体の径方向の軸振れ量成分
△Z 回転軸体の軸線方向の軸振れ量成分
【技術分野】
【0001】
本発明は、被計測対象である回転軸体の軸線方向および径方向における軸振れ(振動)量を光学的に非接触にて計測可能な軸振れ計測装置に関する。
【背景技術】
【0002】
例えば、水や蒸気の保有するエネルギーを利用してタービンを回転させて発電を行なう発電タービンプラントなどでは、高効率であるとともに、高い運用性および安全性が要求される。特に高速回転するタービンに軸ねじれ、軸たわみ、軸振れなどの変形が生じた場合には、非常に危険な事態を引き起こしかねず、前記のような安全性などを確保するためにも、タービンなどの回転軸体の軸振れなどを定量的に把握し、異常が認められた場合0には所定の対策を確実に講じることが重要であり、そのために簡単かつ高い精度にてこれらを計測可能な計測装置や計測方法が望まれている。これらのうち、軸振れの測定技術については、従来より多くの提案がなされてきているところである。
【0003】
被計測対象である回転軸体の軸振れ計測技術としては、例えば特許文献1において提案されている。この提案は、回転軸を中心として回転する回転体と、直角に折り返された隣り合う反射面を挟角側に有するとともに、該折り返し側が前記回転軸と同軸平行状態となるように前記回転体に設けられた反射鏡と、前記反射鏡に任意の入射方向から光ビームを照射する検出用照射器と、前記光ビームにおける前記反射面から反射された反射光ビームを検出する検出素子とを備えた軸振れ計測装置に関するものである。この計測装置を使用すれば、検出用照射器により反射鏡へ照射する光ビームとその反射鏡からの反射光ビームとが回転体の回転角にかかわらず常に平行となるため、従来のように検出用照射器による光ビームの入射角を考慮しながら位置検出器を配置させた状態での調整が不要となり、光ビームの入射角に依存せずに各構成部の位置関係が決まって調整が楽になる利点がある。
【0004】
また、従来の回転軸体のたわみ測定技術は、例えば特許文献2において提案されている。特許文献1記載の技術は、回転軸体の曲げモーメント測定装置に関するものであり、回転軸体の曲げモーメントを求めるために、当該回転軸体の外周面に取り付けられた円板とその端面に対向して設けられ、当該円板までの距離を測定する距離測定器とを備えており、前記回転軸体の回転中にこれにたわみが生じたことによる前記距離の変化から当該円板の傾き角(前記回転軸体のたわみ角)を求めるようにしたものである。なお、本明細書では、以下、用語「軸振れ」を「軸のたわみ」をも含む意味で使用している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−339620号公報
【特許文献2】特開昭57−12337号公報
【特許文献3】特開2000−205977号公報
【特許文献4】特開2002−333376号公報
【特許文献5】特開2006−84462号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1記載の技術では、回転軸体において軸線方向に生じた軸振れを計測することが困難であるばかりでなく、ある程度のサイズの反射鏡を用いる必要があるので、回転軸体の外周面に設置する反射鏡の数に制限があり、結果として高い精度で軸振れ量を計測するのは困難である。また、特許文献2記載のたわみ計測技術では、直接距離測定器によって回転軸体外周面の円板までの距離を測定するので、回転軸体の軸線方向に直角な方向に軸振れを生じる場合には、当該軸振れを検出するのは困難である。また、回転軸体の軸たわみ角が小さい場合には距離測定器によって非常に微小な距離を測定しなければならず、そのため当該測定器に高い測定精度が必要とされ、結果として距離測定器が高額になってしまうという問題がある。
【0007】
また、特許文献3〜5などで提案されているトルク計測装置は、回転軸体に加えられるトルクを測定するには良好な方法であるが、そもそも回転中に生じる回転軸体の軸振れ量を測定することを想定したものではなく、当該軸振れ量を測定できない。
【0008】
本発明は、前記問題を解決すべくなされたものであり、簡単に回転軸体の軸線方向および当該方向に直角な径方向における軸振れ量を非接触にて測定できる軸振れ計測装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記目的を達成するために、本発明の軸振れ計測装置は、被計測対象である回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が形成されてなる環状の反射パターンと、前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1の光線および第2の光線と、前記各所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じた電気パルス信号を生成し、当該電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の前記外周面に対する照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備えてなることを特徴とする。
【0010】
前記第1の光線または前記第2の光線は、前記反射パターンに照射された前記第2の光線または前記第1の光線が、そこから反射されて光誘導手段によってその光路を変更された反射光として構成することができる。また、前記反射パターンに照射される前記第1の光線および前記第2の光線の入射角は互いに相違する値に設定することができ、そのなかでも前記第1の光線は、前記回転軸体の外周面に対して略直角とされるのが好ましい。
【0011】
前記光反射性部分もしくは前記光非反射性部分、またはこれら双方は適宜の面積を有する領域に形成してもよく、適宜の線幅を有する線状に形成してもよい。また、前記光反射性部分若しくは前記光非反射性部分、またはこれら双方は、それ自体が幅変化部として形成できる。ここで、幅変化部とは、これら各部分またはこれらの双方において前記両部分の配置方向に直交する方向の位置(距離)に応じて前記各部分の当該配置方向における幅(距離)が一定の割合で変化するように構成された部分を指している。すなわち、幅変化部は、これら両方向の位置関係(距離)が1対1に対応しており、いずれか一方の距離の変化が得られれば、他方の距離の変化が必然的に求まるように構成されている。前記光非反射性部分としては、任意の面積を有する領域または適宜の線幅を有する線状に形成されたものなどが含まれる。所定の領域を有する光反射性部分または光非反射性部分を中間にして前記配置方向両側からこれを線状の光非反射性部分または光反射性部分で挟み込むように組み合わせた領域を幅変化部として形成することもできる。
【0012】
前記環状の反射パターンは、前記各光線がそれぞれ照射されるように各別に形成することができる。また、前記反射パターンは、前記回転軸体の外周面に環状に取り付け可能なターゲット体に設けられた少なくとも1つの被照射面に形成することもできる。
【発明の効果】
【0013】
本発明では、被計測対象である回転軸体の外周面にその周方向に幅変化部が形成された環状の反射パターンを設け、これに第1の光線および第2の光線を照射し、これらの反射光をそれぞれまたは重ね合わせた状態で受光して各反射光についての受光、不受光のタイミングの変化から演算により回転軸体の軸線方向および径方向の軸振れ量成分を求めることとしたので、当該回転軸体の回転中に生じた回転軸体の軸線方向および径方向の軸振れ量成分を非接触にて簡単に求めることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の軸振れ計測装置の実施形態の一例を示す図である。
【図2】図1に示す実施形態の一部を変形した変形例を示す図である。
【図3】図1に示す軸振れ計測装置の計測原理を説明する図である。
【図4】図1に示す軸振れ計測装置の計測原理を説明する図である。
【図5】本発明の軸振れ計測装置に用いられる反射パターンの一例を示す図である。
【図6】本発明の軸振れ計測装置に用いられる反射パターンの別の例を示す図である。
【図7】本発明の軸振れ計測装置に用いられる反射パターンのさらに別の例を示す図である。
【図8】本発明の軸振れ計測装置の実施形態の別の例を模式的に示す図である。
【図9】図8に示す軸振れ計測装置の実施形態の変形例を示す図である。
【図10】図8に示す軸振れ計測装置の実施形態のさらに別の変形例を示す図である。
【図11】図8〜図10に示す実施形態の2つの反射パターンの位置関係と、これらから反射する反射光の波形を示す図である。
【図12】図4〜図6の反射パターンを被照射面に備える帯状のターゲット体の一例を示す図である。
【図13】本発明の軸振れ計測装置の実施形態のさらに別の例に適用可能なターゲット体の例を示す図である。
【図14】図13のターゲット体の使用例を示す図である。
【図15】本発明の軸振れ計測装置の実施形態のさらに別の例に適用可能なターゲット体の例を示す図である。
【図16】図15のターゲット体の使用例を示す図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照して本発明の軸振れ計測装置の実施形態について詳細に説明するが、本発明は以下の実施形態に限定されない。なお、以下の各図では、同一または共通の各部については同一の符号を用いて示しており、重複した説明は以下では省略する。
【0016】
実施形態1
図1は、本発明の軸振れ計測装置の実施形態の一例を示す図である。この図に示す軸振れ計測装置1は、被計測対象である回転軸体10の外周面にその周方向に沿って環状に形成された反射パターン20と、回転軸体10のy軸方向における回転軸体10の軸線方向および径方向の軸振れ量成分をそれぞれ求めるための発光部3および受光・演算部4を備えている。また、図1では、さらに、反射パターン20を共用し、不図示の発光部および受光・演算部34を備えた構成とされ、回転軸体10のx軸方向における軸振れ量を計測するようになっている。回転軸体10のx軸方向については図示を簡略化しているが、これらx軸方向およびy軸方向における各機器はいずれも同じ構成であるものとし、以下では、y軸方向の軸振れ計測についてのみ説明することとする。
【0017】
本実施形態における反射パターン20は、回転軸体10の周方向に光反射性部分21および光非反射性部分22が交互に配置されて帯状に形成されている。反射性部分21および非反射性部分22は、それぞれ同形、同サイズの略直角三角形の平面形状を有し、帯状の反射パターン20の長さ方向(両部分の配置方向)両側の平行な両側縁と、これら両側縁のそれぞれに対して略直角な直線状の境界線(長辺に相当)と、この長辺に相当する境界線と鋭角をなし、かつ当該境界線と前記一方の側縁とを結ぶ直線状の境界線(斜辺に相当)とで画定されて幅変化部として形成されている。なお、以下では、幅変化部としての光反射性部分を単に「反射性幅変化部」といい、幅変化部としての光非反射性部分を単に「非反射性幅変化部」ということとする。そして、反射パターン20は、これら反射性幅変化部21および非反射性幅変化部22をそれぞれ斜辺に相当する境界線を共通にして反対向きに組み合わせたものを1単位とし、その隣り合う単位同士長辺に相当する境界線を共通にして繰り返し配列されている。
【0018】
反射パターン20は、その長さ方向が回転軸体10の周方向に向き、各単位の長辺が回転軸体10の軸線方向に略平行となるように当該回転軸体10の外周面にその周方向に環状に形成される。これにより、回転軸体10の軸線方向の軸振れ量(距離)と、回転軸体10の回転に伴い反射パターン20上をその周方向に走査する反射性幅変化部の幅(反射光の反射時間)とが1対1に対応し、後者を求めれば、簡単な演算により前者が求められるようになる。
【0019】
反射性幅変化部21には、例えば通常のミラーの他、可とう性のある反射ミラーや反射シート、所定形状に塗布して得られる反射性塗料の塗膜などを使用できる。また、非反射性幅変化部22には光非反射性の板状体やシート状体の他、所定形状に塗布して得られる非反射性塗料の塗膜などを使用できる。
【0020】
発光部3としては、連続発光可能な光源を有するものが使用される。この光源としては、各種のレーザー、発光ダイオードまたはランプのほか、これらの1種とレンズ、スリット、ピンホールなどとを適宜組み合わせたものなどを使用できる。好ましくは、これらの光源のうち、指向性のある光線を出射可能な各種レーザーを用いるのがよい。本実施形態では、2条の光線(第1の光線L1および第2の光線L3)をそれぞれ出射可能な構成のものを使用している。ここで、第1の光線L1は回転軸体10の軸線方向における軸振れ量成分計測用であり、第2の光線L3は回転軸体10の径方向における軸振れ量成分計測用である。なお、このような2条の光線を出射可能な発光部3を用いる以外に、例えば1条の光線を出射可能な発光部を2基用いるようにしてもよい。
【0021】
この発光部3には、必要に応じて、図1に示すように、その光線出射口にそれぞれ接続可能な光ファイバーケーブルなどの光伝送手段11、25を用いることができる。このような光伝送手段11、25を用いることで、発光部3を回転軸体10の周囲の任意の位置に設置できる利点がある。図1ではまた、光伝送手段11直後の第1の光線L1の光路上にレンズ12を設置するとともに、光伝送手段25直後の第2の光線L2の光路上にレンズ26を設置し、反射パターン20への照射前に第1の光線L1および第2の光線L3をそれぞれ平行光に整えている。
【0022】
本実施形態においては、第1の光線L1がその光路上斜め45[°]に設置された光誘導手段としてのハーフミラー13を透過して回転軸体10上の反射パターン20に対して略垂直に照射される。第1の光線L1が反射パターン20の所定位置に照射されると、回転軸体10の回転方向に非反射性幅変化部22を横断する間は当該位置からの反射はなく、反射性幅変化部21を横断する間、そこから反射光L2が反射する。この反射光L2は、光線L1と同一の光路を逆方向に進行し、ハーフミラー13によりその光路を直角に曲げられ、受光部5において受光される。なお、受光部5の設置位置によって反射光L2を受光部5で直接受光可能な場合には、このハーフミラー13を設置する必要はない。なお、第1の光線L1の反射パターンへの照射角度は、略垂直に限定されず適宜の角度に設定できるが、精度低下などの問題を考慮すると、略垂直に設定するのが好ましい。この照射角度を略垂直以外の適宜の角度に設定する場合には、精度低下を抑制するために必要に応じてレンズなどを用いた光線の調光を行うなどの配慮が必要となる。
【0023】
また、第2の光線L3は、反射パターン20上、前記第1の光線と実質的に同じ照射位置に入射角(90−θ)[°]で照射される。ここで、θは回転軸体10の軸線方向の外周面に対する光線L3の照射角を示している。この第2の光線L3も第1の光線L1と同様に、回転軸体10の回転方向に非反射性幅変化部22を横断する間は当該位置からの反射はなく、反射性幅変化部21を横断する間、そこから反射光L4が反射角(90−θ)[°]で反射する。この反射光L4は、受光部6において受光される。
【0024】
この第2の光線L3およびその反射光L4は、例えば1枚または複数枚の反射ミラー(反射面を備えていればその他の板材料(反射材)であってもよい。以下、「反射ミラー」という場合、このような反射材も含んでいるものとする。)やハーフミラーをそれぞれ組み合わせて用いることで、受光部6に至るまで図1の場合とは異なる光路を適宜変更することができる。図2は、このようにして第2の光線L3およびその反射光L4の光路を変更した変形例を示している。なお、この図においても、x軸方向およびy軸方向の双方の軸振れ量を計測するようにそれぞれの方向に機器を配置しているが、図1の場合と同様に、y軸方向の軸振れ計測についてのみ説明することとする。また、図2におけるその他の構成については、図1に示す実施形態におけるものと本質的に変わるところはない。
【0025】
図2の例では、反射ミラー14aおよびハーフミラー14bを各1枚用い、前者は反射光L4の光路に対して直角に設けられ、ハーフミラー14bは第2の光線L3の光路に対して斜め45[°]となるように設けられている。反射パターン20の所定位置に所定の入射角で第2の光線L3が照射されると、反射パターン20の反射性幅変化部21を横断する間、そこから反射する反射光L4は反射ミラー14aにより再び反射され、その光路を逆行し、さらに反射パターン20で反射する。この反射光L9は、光線L3の光路上を逆行し、ハーフミラー14bによって実質的に直角な方向にその光路が変更され、受光部6において受光される。このような構成とすることで、回転軸体10の軸振れが大きく、反射光L4の平行移動がレンズ28に収まらないため、結果として計測不能となるのを防止することができる。
【0026】
本発明における受光部5,6は、前記した断続的な反射光L2、L4を受光し、その受光、不受光のタイミングに応じて光電変換により受光エネルギーに相当する所定の大きさの電気信号を出力するように構成されている。このような受光部5,6としては、受光(光電変換)素子、またはこれらを含んだ受光機器などが好適に使用できる。ここで、受光素子の具体例としては、例えばフォトダイオード、フォトトランジスタ、フォトマルチメータなどが挙げられる。また、受光機器の具体例としてはCCDカメラなどの撮像装置などが挙げられる。受光部5は、図1に示すように2条の光線をそれぞれ受光可能な構成であってもよく、1条の光線のみを受光可能な構成であってもよい。また、必要であれば、1つの受光部5に前記例示の受光素子を複数組み込んでさらに複数条の光線を受光でき、それぞれの受光エネルギーの大きさに応じた電気信号を出力可能な構成であってもよい。
【0027】
演算部7は、図1に示すように、それぞれ回転軸体10の軸線方向の軸振れ量成分△Zを求める第1演算系統および径方向の軸振れ量成分△Yを求める第2演算系統を有している。第1演算系統は、演算器8aを含んでいる。また、第2演算系統は、演算器8b、減算器9aおよび乗算器9bを含む一連の信号ラインを有している。ここで、演算器8a、8bは、回転軸体10の軸線方向の距離と反射性幅変化部をその配置方向に横断する光線の走査距離(反射光の反射時間、ひいては電気パルス信号の各パルス幅に相当。)との関係に基づいて、回転軸体10に軸振れが生じた場合には、光線の走査距離(反射光の反射時間)の変化から回転軸体10の軸線方向の軸振れ量成分を算出するために所定の演算を行う機能を備えた機器を指している。また、減算器9aは2つの入力の減算機能を備えた機器であり、乗算器9bは、2つの入力を乗算し、またはあらかじめ設定されている定数と入力とを乗算する機能を備えた機器である。なお、演算部7では、さらに回転軸体10の回転数信号の入力を受けるようにし、そのばらつきから回転軸体10の回転速度が一定であるか否か(所定の回転速度の範囲内にあるか否か)を判定するようにしてもよい。なお、本明細書では以下、回転軸体の「回転」は、一定速度範囲での回転を指すものとする。
【0028】
なお、図1では、乗算器9bに入力される正接値tanθは、それぞれ受光部6が反射光L4の回転軸体10の外周面に対する反射角θを読み取って演算を行い、信号線30を介してそれぞれ乗算器9bに送出されるように構成されているが、このような構成には限定されない。例えば、回転軸体10の回転に伴う軸振れによって軸線の水平方向とのなす角度が非常に小さく無視できる場合などには、光線の入射角および反射角は略一定となるので、乗算器9bに予め公知の方法により一定値として入力しておくこともできる。また、演算部7は、表示部を有していても良く、その場合、回転速度(回転周期)などの他の情報を演算、表示可能なものであってもよい。このような演算部7は、CPUや記憶装置を含む公知の構成を用いることができる。電気信号の入力から前記各演算に至る一連の演算制御は、前記記憶部(不図示)に予め格納された設定プログラムを実行することによって行うことができる。また、この記憶部には受光部5からの電気信号にノイズなどの影響により異常が生じた結果、軸振れ量の計測結果に異常値が含まれる場合に当該異常値を廃棄するように実行されるプログラムも含めることができる。
【0029】
次に、図3および図4を参照して本実施形態の軸振れ計測装置の使用方法および計測原理について説明する。図3(a)は、図1に示す回転軸体10の外周面における反射パターンの同一の照射位置に対して第1の光線L1が垂直に照射されるとともに、第2の光線L3が入射角(90−θ)[°]で照射されているものとする。回転軸体10の回転に伴い反射性幅変化部21も回転運動し、第1の光線L1および第2の光線L3はそれぞれ反射性幅変化部21のOS線上を走査し、その間そこから反射光L2およびL4が反射される。これらの反射光L2(反射時間)およびL4(反射時間)は、受光部5,6で受光され、光電変換により、それぞれの反射光の受光、不受光に対応する電気パルス信号に変換され、当該信号のパルス幅の基準値(または反射時間の基準値)が求められる。それとともに、演算器8a、8bにはそれぞれ反射性幅変化部21を横断する光線の走査距離(反射時間)と回転軸体10の軸線方向の距離との間の関係から、距離OPが求められる。これらの演算結果は、それぞれ演算部7内の所定の記憶部に格納される。
【0030】
回転軸体10の回転に伴う軸振れは軸線方向および径方向の軸振れ量成分の合成値として把握できるので、回転軸体10が軸線方向に軸振れし、その後に径方向に軸振れしたものとし、前記各軸振れ量成分を算出する方法について説明する。まず、回転軸体10が軸線方向、図3の左から右に向って△Zほど軸振れを生じ、これにより、反射性幅変化部21は頂角PがP’の位置まで移動したと仮定する。この場合、第1の光線L1および第2の光線L3は反射性幅変化部21のOS’線上を走査することになり、その結果、回転軸体10に軸線方向の軸振れが生じていない場合よりもより反射時間の長い反射光L2およびL4が反射される。受光部5,6では、これらの反射光L2及びL4を受光し、それぞれの反射光L2およびL4の受光、不受光に対応して生成された電気パルス信号が演算部7に入力される。演算器8a、8bにはそれぞれ反射性幅変化部21を横断する光線の走査距離(反射時間)と回転軸体10の軸線方向の距離との間の関係が記憶されているので、基準値に対する距離OPと、パルス幅OS’に対する距離OP’とがそれぞれ得られる。そして、これらのから、次式(式1)にしたがい、△Zが求められる。
【0031】
【数1】
式1中、
は、それぞれの線分OP、OS、OS’の長さを、またt11およびt12は反射光の反射時間を指している。
【0032】
回転軸体10に軸線方向逆方向に軸振れが生じた場合にも、同様の方法により△Zを求めることができる。このように、回転軸体10に軸線方向にのみ軸振れが生じている(径方向の軸振れが生じていない)場合には、演算部7、34でそれぞれ演算器8a、8bの演算結果及び演算器35a、35bの演算結果は同値となるため、減算器9a、36aでの演算結果はいずれも0となり、結果として△Y=0となる。
【0033】
次に、回転軸体10が前記軸線方向に軸振れしている状態から径方向に△Yだけ軸振れを生じたものとする。このとき、図3(b)に示すように、第1の光線L1はO”にて、また第2の光線L3はT”にて回転軸体10の外周面における反射性幅変化部21に照射されることになる。第2の光線3の光路は固定状態とされ、当該光路の回転軸体10の外周面に対する角度はθで維持されるものとする。また、この場合、回転軸体10は軸線方向にさらに軸振れを起こしていないので、第1の光線L1の反射光に対応する電気信号が演算器8aに入力されることで、回転軸体10の軸線方向の軸振れ量成分の演算結果は△Zのままとなる。それに対して、第2の光線L3は反射性幅変化部21のT”S”線上を走査することになるので、そこでの反射光L4はT”S”の線分に対応する反射時間だけ受光部6で受光され、それに対応する電気信号が演算器8bに入力されることで、演算器8a、8bにて演算結果が異なってくる。減算器9aにおいて演算器8bの演算結果から演算器8aの演算結果を減算し、さらに乗算器9bで正接値tanθを乗ずることで、△Yを求めることができる。
【0034】
具体的には、図3(b)において、線分OO”の長さは△Yであり、三角形OO”T”における線分O”T"の長さは、次式(式2)で求められる。
【0035】
【数2】
また、回転軸体10の軸線方向および径方向の双方の軸振れに起因する軸線方向の軸振れ量成分の合計をRとすると、このRは上式(式2)を用いて以下式(式3)にように表わされる。
【0036】
【数3】
この式3を変形することで、△Yは以下の式(式4)のように求めることができる。
【0037】
【数4】
【0038】
本実施形態の軸振れ計測装置についての以上の計測原理の説明をまとめたものを図4に示す。第2の光線L3については、回転軸体10の軸線方向の軸振れ量成分△Zおよび径方向の軸振れ量成分△Yの双方をそれぞれ演算で求めるため、図3および式4に示すように、演算器8bにおける軸線方向および径方向の双方を加味した軸振れ量の演算結果(R)から、回転軸体10の軸線方向の軸振れ量成分(△Z)を減じ、得られた結果に正接値(tanθ)を乗ずることで、回転軸体10の径方向における軸振れ量成分(△Y)を求めることができる。なお、回転軸体10が図3に向って右から左に向って△Zほど軸線方向の軸振れを生じた場合については説明を省略するが、この場合にも上式(式4)により同様に求めることができる。
【0039】
このようにして得られる演算結果は、演算部7が所定の表示部を備えている場合には当該表示部で表示され、またこれらの演算結果が制御に用いられる場合には、相手方の制御機器に有線または無線にて送信することができる。
【0040】
[反射パターンのバリエーション]
図1に示した反射パターン20は、反射性幅変化部21および非反射性幅変化部22を備えた構成であるが、これらの幅変化部は同図に示した同形、同サイズの略直角三角形の平面形状を有するものに限定されない。例えば、これらの幅変化部21,22は、二等辺三角形などを含む山形形状の略三角形や略台形などの平面形状のなかからも適宜選択できる。また、反射性幅変化部21の平面形状と非反射性幅変化部22のそれとは、互いに異なるように選択でき、例えば一方を略三角形状などとし、他方を略台形形状などとすることもできる。また、これらの平面形状のなかから選択した隣り合う幅変化部の斜辺および長辺にそれぞれ相当する共通の境界線を、例えば2次関数や指数関数で表わされる曲線状とすることもできる。
【0041】
反射パターンはまた、反射性幅変化部および非反射性幅変化部の組合せからなる構成に限定されず、第1および第2の2条の光線の反射パターン上での照射位置が実質的に同じか否かなどによってさらに多くのバリエーションを採用できる。図5〜図7は、そのような反射パターンのバリエーションの幾つかの例を示している。
【0042】
図5に示す反射パターンの例では、その長さ方向に沿って2条の光線の照射ゾーン(以下、単に「ゾーン」という。)23、40がそれぞれ個別に併設されている。ゾーン23は、図1に示した直角三角形の平面形状を有する非反射性幅変化部22と、その斜辺を共通にして反対向きに配置した台形の平面形状を有する反射性幅変化部24との組合せを1単位とし、この単位を反射パターンの長さ方向に繰り返し配置したものである。
【0043】
また、ゾーン40は、反射パターンの全長にわたり少なくともこのゾーンの幅で光反射性を備える領域に、該反射パターンの幅方向に形成された直線状の非反射性部分(以下、この部分を「非反射性区画線」と呼ぶこととする。)42と、隣り合う非反射性区画線42,42の一端同士を斜めに連結するように形成された直線状の非反射性区画線43とが鋸刃状に配置されたものである。この鋸刃状の配置は、図5に示すように、反射パターンの長さ方向に繰り返し形成されているのが好ましい。また、複数の鋸刃状の配置によって囲まれた個々の光反射性部分41は互いに同形、同サイズの幅変化部として形成され、その配置方向に均等な間隔で配置される。
【0044】
反射パターン40の長さ方向における非反射性区画線43のピッチは、反射パターン20における各単位の配置方向における長さ(繰り返しピッチ)よりも大きく設定することが好ましい。本実施形態においては、後述するように、各反射パターン23、40からの反射光を受光部にて受光し、それぞれの受光、不受光のタイミングを求めるのに好都合だからである。なお、本実施形態では、非反射性区画線42、43を直線状とするが、2条の非反射性区画線42,43によって区画される光反射性部分が幅変化部として形成されれば、前記非反射性区画線42,43のうちの一方または双方は曲線であってもよい。
【0045】
この例の反射パターンを回転軸体10の外周面にその周方向に形成する場合には、非反射性区画線42、43のうちの一方は、回転軸体10の径方向に実質的に一致させることが好ましい。この反射パターンの例では、ゾーン23の幅方向略中央領域の所定位置(例えば、図5中、符号231で示した1点鎖線上の任意の点)に第1の光線を照射することができる。この場合、回転軸体10の回転に伴い、第1の光線はこのゾーン23の1点鎖線231上を走査することになる。また、第2の光線は、ゾーン40の幅方向略中央領域の所定位置(例えば、図5中、符号401で示した1点鎖線上の任意の点)に照射することができる。この場合にも、回転軸体10の回転に伴い、第2の光線はこのゾーン40の1点鎖線401上を走査することになる。
【0046】
図6および図7は、反射パターンのバリエーションの更に別の例を示している。これらのバリエーションは、1の反射パターンの2つの異なる位置にそれぞれ第1および第2の光線を照射するような場合に用いられるものである。図6に示す反射パターン45の例では、帯状の反射パターン45の被照射面全面が光反射性とされており、そこに幅方向に互いに略平行に設けられた二重線状の非反射性区画線47,47、・・・と、隣り合う非反射性区画線47、47の一端同士を斜めに連結するよう設けられた非反射性区画線48とが鋸刃状に配置されている。この鋸刃状の配置は、図6に示すように、反射パターン45の長さ方向に繰り返し形成されるのが好ましい。なお、二重線状の非反射性区画線47は、必要であれば、回転軸体10の回転運動の基準点などとして、また回転速度や角速度を求めるのに用いることができる。
【0047】
この反射パターン45では、その長さ方向に第1および第2の2条の光線をそれぞれ照射する2つのゾーン45a、45bが設定される。ゾーン45aは、その幅方向略中央領域に略垂直に第1の光線が照射される領域であり、回転軸体10の軸振れが生じていない場合には、当該光線が走査線452上を走査するようにする。また、ゾーン45bは、その幅方向略中央領域に第2の光線が入射角(90−θ)[°]で照射される領域であり、回転軸体10に軸振れが生じていない場合には、当該光線が走査線451上を走査するようにする。
【0048】
また、図7に示す反射パターン45の例では、図6に示す反射パターンにおいてその幅方向にゾーン45a、45bのそれぞれをこれらが一部重複するように互いに接近させて設定している。それ以外の構成については、図5に示すものと本質的に変わりはない。この図7に示す反射パターン45の場合、各ゾーン45a、45bをこのように重複して配置することで、図6に示した場合よりも反射パターン45の幅3を小さく設定できる利点がある。
【0049】
図5〜図7に示す反射パターンにおける各ゾーンの幅(計測範囲)は、以下のようにして算定することができる。この算定方法を図6に示す反射パターン45を例にとり説明する(図3及び図5に示す例でも同様である。)。なお、説明の便宜上、第1および第2の各光線はそれぞれ、回転軸体10の回転中に軸振れが生じていない場合、反射パターン45の1点鎖線451、452上を走査するものとする。
(1)第1の光線が垂直に照射される反射パターンのゾーン45aの幅
回転軸体10の軸線方向のいずれか一方向に軸振れが生じた場合に予想される最大軸振れ量をlV(反対方向に対しては−lV)とすると、このゾーン45aにおける計測範囲は±lVで表わされ、ゾーン45bの幅は2lvとなる。したがって、好適には、ゾーン45bの幅は2lV以上に設定するのがよいことが分かる。なお、ここでは、反射パターンに第1の光線を垂直に照射する場合について説明するが、第1の光線を垂直(入射角0[°])以外の入射角で反射パターン45に照射した場合にも同じ結果が得られることはいうまでもない。
(2)第2の光線を所定の角度で斜めに照射する場合の反射パターンのゾーン45bの幅
回転軸体10の径方向内外いずれかの方向に生じうる最大軸振れ量をlH(反対方向に対しては−lH)とした場合、回転軸体10の軸線方向および径方向の双方に軸振れが生じた場合の一方向における照射位置の走査線451からの最大移動距離は、前記(1)を加味すると、(lV+lH・cotθ)によって求められる。よって、計測範囲は、±(lV+lH・cotθ)で求められ、したがって、ゾーン45bの幅は2(lV+lH・cotθ)以上に設定することが好ましい。
【0050】
実施形態2
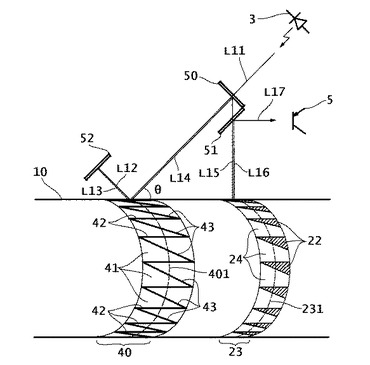
図8は、本発明の軸振れ計測装置の実施形態の別の例を示す図である。回転軸体10の外周面には、図5に示した反射パターン23、40が回転軸体10の軸線方向に所定の距離だけ離してそれぞれ形成されているものとする。なお、以下に示す各図では、演算部7およびこれと受光部5との信号のやり取りについては図1に示す実施形態と共通であり、また光伝送手段などは必須の構成ではないので、これらの機器及び信号線については図示を省略している。本実施形態では、1の発光部3から出射された1の光線を回転軸体10の外周面におけるいずれか一方の環状の反射パターンに照射し(照射位置については前記のとおり。)、そこからの反射光をハーフミラー50,51や反射ミラー52などからなる光誘導手段によって誘導して、他方の環状の反射パターン40を照射するように構成されている。なお、反射パターン20は、実施形態1と同様の構成のものを用いることとしている。また、図8において、説明の簡略化のために、θ=45[°]としている。
【0051】
光誘導手段におけるハーフミラー50は、光線L11がこれに垂直に照射されるように配置されている。また、ハーフミラー51は、ハーフミラー50との組み合わせが逆くの字状を呈するようにハーフミラー50の下端側にこれとは直角な向きに配置されている。また、反射ミラー52は、光線L11が反射パターン40に照射され、そこから角度θ=45[°](反射角と一致)で反射する反射光L12の光路上にこれに垂直に配置固定される。
【0052】
本実施形態によれば、発光部3から出射された光線L11はハーフミラー50をこれに垂直に透過し、反射パターン40にθ=45[°](入射角に一致)で照射され、当該反射パターン40の非反射性区画線42,43を除いた反射性部分41を走査する間に反射光L12として反射され、反射ミラー52に垂直に照射されるように進行する。そこで反射された反射光L13は光線L12の光路を逆行し、反射パターン40における光線L11の照射位置に照射され、反射性部分41を走査する際に反射される反射光L14が光線L11とは反対側からハーフミラー50に照射され、略鉛直方向下方に反射光L15が反射される。反射光L15は、反射パターン20に略垂直に照射され、そこで反射性幅変化部21上を走査する間反射する点滅反射光L16は光線L15の光路を逆行する。この点滅反射光L16はハーフミラー51で直角に反射され、受光部5において受光される。
【0053】
受光部5では、光電変換によって点滅反射光L16の受光、不受光のタイミングに応じた電気パルス信号を不図示の演算部に出力する。この演算部は、これへの入力信号線路において入力される電気信号が分岐され、第1演算系統および第2演算系統にそれぞれ入力されるように構成されている点で異なるが、その他の構成については図1に示したものと本質的に変わりはない。この演算部では、前記したように、実施形態1の場合と同様な演算処理が行われ、回転軸体10の軸線方向の軸振れ量成分△Zおよび径方向の軸振れ量成分△Yが求められる。
【0054】
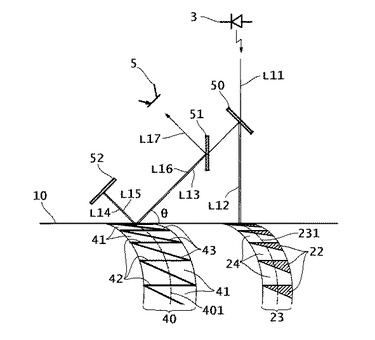
図9は、図8に示した本発明の軸振れ計測装置の実施形態において、光線が照射する反射パターンの順を入れ替えた一変形例を示している。この図に示す実施形態は、図8に示す実施形態2より発光部3、受光部5および光誘導手段50、51の配置を変更したものであり、それ以外は本質的に変わるところはない。また、この図に示す実施形態においても、実施形態2の場合と同様に説明を簡略化するために、θ=45[°]とする。
【0055】
本変形例では、回転軸体10の外周面に対して光線を垂直に照射する位置に発光部3が配置され(前記のように光伝送手段を用いる場合には、発光部3の位置はこの位置に限定されない。)、そこからの光線L11の光路上にこれに対して斜め45[°]となるようにハーフミラー50が配置されている。また、ハーフミラー50からの反射光L13の反射パターン40に向けた光路上には、これに対して斜め45[°]となるようにハーフミラー51が配置されている。なお、反射ミラー52の固定位置については、図8に示した実施形態と同様である。
【0056】
発光部3からの第1の光線L11は、ハーフミラー50を透過して反射パターン23の幅方向略中央の照射位置に垂直に照射され、回転軸体10の回転に伴い当該照射位置を回転方向に走査し、反射性幅変化部24上を走査する際に反射される。この反射光L12は光線L11の光路上を逆行し、ハーフミラー50において反射光L13としてこれに垂直に反射される。反射光(第2の光線に相当)L13は、ハーフミラー51を透過し、反射パターン40の幅方向略中央の照射位置に45[°]の入射角で照射される。反射パターン40では、非反射性区画線42,43を横断するとき以外は、反射角45[°]で反射された反射光L14が、反射ミラー52にて折り返されるように反射される。この反射光L15は、光線L14の光路を逆行し、反射パターン40の反射性領域41を走査する間に反射され、さらに点滅状態の点滅反射光L16となる。点滅反射光L16は、ハーフミラー51によって直角に反射し、受光部5において受光される。受光部5において光電変換により点滅反射光の受光、不受光に対応した電気パルス信号は二分され、不図示の演算部に入力され、そこで前記方法と同様の方法により回転中の回転軸体10の軸線方向および径方向における軸振れ量の各成分を求めることができる。
【0057】
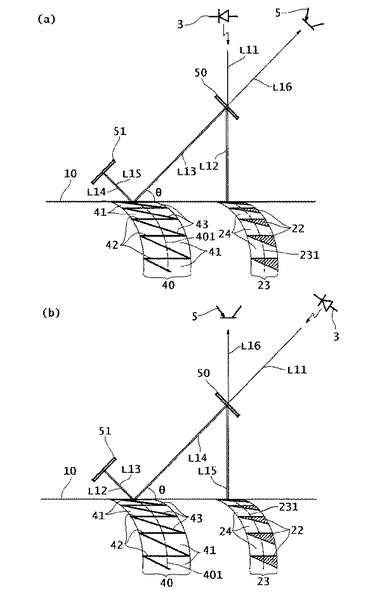
図10は、図8および図9に示した本発明の軸振れ計測装置の実施形態の別の変形例を示しており、光誘導手段としてハーフミラー50と反射ミラー52とを各1個用いることとした以外は、図8および図9に示した例と本質的に変わりはない。この図に示す例でも、回転軸体10の外周面に形成された2種類の反射パターンのいずれに光線を先に照射してもよいことを示している。
【0058】
図10に示した例では、回転軸体10の外周面に対して光線を垂直に照射する位置に発光部3が配置され、そこからの光線L11の光路上にこれに対して斜め45[°]となるようにハーフミラー50が配置されている。また、ハーフミラー50からの反射光L13が入射角45[°]で反射パターン40の所定の照射位置に向けた光路上にこれに対して斜め45[°]となるように配置されている。また、反射ミラー52は、反射光L13の反射パターン40から反射角45[°]で反射する反射光L14の光路に対して垂直に配置固定されている。図10に示した2つの例についての光路などを以下簡単に説明する。
【0059】
図10(a)の例では、まず発光部3からの光線(第1の光線)L11はハーフミラー50を透過して反射パターン23に略垂直に照射され、そこからの反射光L12がハーフミラー50反射され(反射光L13)、反射パターン40の走査線401上に第2の光線として45[°]の入射角で照射される。反射パターン40では、非反射性区画線42,43上を横断するとき以外は、反射光L14が反射角45[°]で反射される。この反射光は、反射ミラー52およびハーフミラー51を経て受光部5によって受光される。
【0060】
図10(b)は、図10(a)に示した実施形態と同様の反射パターンおよび光誘導手段(50、51)を回転軸体10に対して同様に配置した実施形態において、発光部3からの光線(第1の光線)L11をまず反射パターン40の走査線401上に照射し、次いでその反射光を反射パターン20に照射するように構成したものである。具体的な説明については、前記と重複するところもあり煩雑となるので、説明を省略する。
【0061】
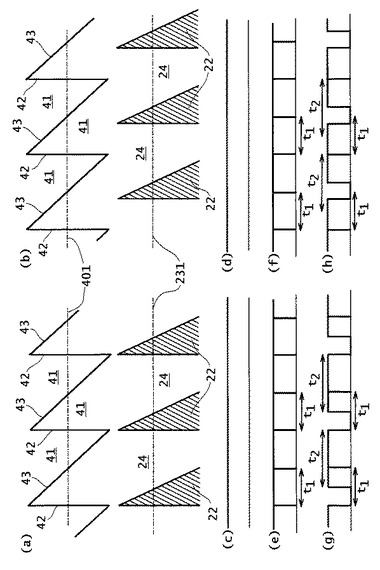
図11は、図8および図10(b)に示した実施形態において、回転軸体10の軸線方向の各反射パターンの回転方向の位置関係と、当該反射パターンからの反射光の波形を示したものである。この図において、(a)は、鋸刃状の反射パターン40の長辺と他方の反射パターン23の長辺とが回転軸体10の同一の軸線方向に一致した構成であり、(b)は鋸刃状の反射パターン40の長辺と他方の反射パターン23の長辺とが回転軸体10の軸線方向にすれている構成である。図11(c)、(d)はそれぞれ発光部からの光線の波形であり、(e)、(f)は、反射パターン40からの反射光の波形である。また、(g)、(h)は、反射パターン40および反射パターン23からともに反射された反射光の波形である。なお、図9および図10(a)に示した実施形態の場合、図11(e)、(f)の波形には反射パターン23からの反射光のそれを示す必要があるが、(g)、(h)については共通となることはいうまでもない。
【0062】
図11(a)における2つの反射パターンの位置関係では、光線が反射パターン40の走査線401上を走査し、非反射性区画線42,43をそれぞれ横断する際には反射されず、同図(e)に示すように、波形にはこれらの区画線の横断に対応して短時間の不通電部分がt1時間ごとに周期的に現れる。続いて、このような波形を有する反射光が反射パターン23に照射され、回転軸体10の回転に伴い走査線231上、交互に繰り返される反射性幅変化部21と非反射性幅変化部22とを順次横断するように走査する。非反射性幅変化部22を横断する際には反射されないので、結果として、図11(g)の波形に示すように、周期t1にて現れる不通電部分に1つおきに非反射性幅変化部22によって生じる不通電部分が重ね合される。このとき、重ね合わされる不通電部分の立下りと非反射性幅変化部によって生じる不通電部分のそれは、時間的に一致する。
【0063】
一方、図11(b)における2つの反射パターンの位置関係では、光線が反射パターン40の走査線401上を走査し、同図(f)に示すように、波形には短時間の不通電部分がt1時間ごとに周期的に現れる。続いて、このような波形を有する反射光が反射パターン23に照射され、走査線231上を交互に繰り返される反射性幅変化部21と非反射性幅変化部22とを順次横断するように走査する。非反射性幅変化部22を横断する際には反射されないので、結果として、図11(h)の波形に示すように、周期t1にて現れる不通電部分を1つおきに非反射性幅変化部22により生じる不通電部分が完全に覆うように重ね合される。このとき、重ね合わされる不通電部分の立下りと非反射性幅変化部によって生じる不通電部分のそれは、時間的に一致しない。
【0064】
[ターゲット体の種々の形態]
反射パターンは、回転軸体10の外周に嵌装可能なターゲット体(基材)を用い、これを回転軸体10に嵌装した場合に外部から光線を照射できる少なくとも1つの被照射面上に形成することができる。ターゲット体の被照射面は、その回転軸体10の軸線方向に沿った断面にて、当該軸線に対して適宜の角度で形成されたものであればよい。ここで、「少なくとも1つの被照射面」とは、前記反射パターンが各光線が各別に照射されるように形成されている場合に、それらを1つの被照射面に、または複数の被照射面に各別に形成することができることを意味している。
【0065】
このようなターゲット体としては、例えば、回転軸体に周方向に巻回可能な程度の可とう性を備え、適宜の厚さを有する帯状体や筒状体のほか、当該回転軸体に直接嵌装可能な種々の形状の環状体や鍔状体などが挙げられる。図12は、帯状または筒状のターゲット体の幾つかの具体例を示している。この図に示すいずれの帯状のターゲット体の具体例についても、その長さ方向が図に向って手前から奥へ向かう方向となっている。また、これらのターゲット体60は、いずれも接着層62を備えた基部61の当該接着層62とは反対側の面を被照射面とされている。その幅方向中央領域には、図12(a)のターゲット体60の例では、図5に示したもの同様の形状の反射パターン45が、また図12(b)の例には、図6に示したものと同様の形状の反射パターン23、40が反射パターンがターゲット体60の長さ方向に形成されている。
【0066】
反射パターン23における反射性幅変化部24もしくは非反射性幅変化部22またはその双方は、光反射性または光非反射性の素材を適宜裁断し、貼付(接着)、埋め込み、溶接などの手段により、または光反射性や光非反射性の塗料組成物などを塗布することにより被照射面の所定の位置に形成することができる。また、反射パターン40、45における反射性部分(反射性領域)41、46や非反射性区画線42,43;47,48についても前記と同様の手段により各ターゲット体60の被照射面に形成することができる。また、回転軸体10が光沢のある金属材料などで形成され、外周面が光反射性を備えている場合には、透明なシート状の基部61の被照射面61aに非反射性幅変化部22や非反射性区画線42,43;47,48を配置することで、反射パターンを形成するようにしてもよい。またこれとは反対に、回転軸体10の外周面が光非反射性である場合には、前記とは逆に反射性幅変化部24、24、・・・や反射性部分41,41、・・・;48,48、・・・を透明なシート状の基部表面に配設して反射パターンを形成するようにしてもよい。
【0067】
実施形態3
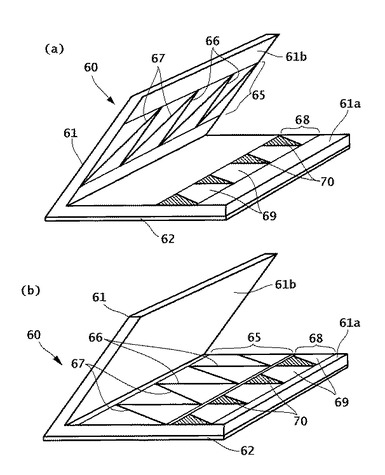
図13は、本発明の軸振れ計測装置に適用可能な環状のターゲット体の別の具体例の一部を示している。この図に示すターゲット体60は、2つの帯状部材をこれらのなす角度が鋭角となるようにその一側縁同士を当接接合した略L字状をなし、その一方の外面に接着層62が設けられている。この図に向かって手前から奥へ向かう方向がこのターゲット体の長さ方向に相当する。ターゲット体60の鋭角に向き合う内面はそれぞれ被照射面61a,61bとされている。図13(a)に示すターゲット体の例では、その長さ方向に沿ってこれら各被照射面61a、61bに反射パターン65、68がそれぞれ設けられている。また、図13(b)の例では、この2つの反射パターン65、68は、接着層62を備えた側の基部の被照射面61aに長さ方向に沿って併設されており、他方の被照射面61bは反射面とされている。2つの反射パターン65、68はそれぞれ、図12(a)に示した反射パターン23、40と同様の形状であるので、説明を省略する。反射パターン23、40が形成された被照射面61aまたは61bにおいて、これらの反射パターン23、40を除く部分は反射性であると非反射性であるとを問わない。
【0068】
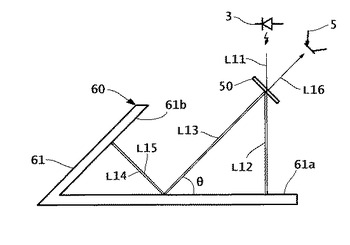
図14は、図13(a)または(b)に示したターゲット体60を回転軸体10に取り付け、本発明の軸振れ計測装置として使用する場合の使用状態を示す図である。図13(a)に示した例の場合、反射光L14が被照射面61bに形成された反射パターン65に略垂直に照射され、図13(b)に示した例の場合には、反射光L13が被照射面61aに形成された反射パターン65に入射角(90−θ)[°]で照射されることになる。本実施形態の使用状態については、図10(a)に示した形態における反射ミラー52を、上方に鋭角に延在し、被照射面61bを備える基部61の一部に変えたのみであり、その他の構成については本質的に変わりはないので、その説明を省略する。受光部5では、点滅反射光L16を受光し、その受光、不受光に応じて生成される電気パルス信号が二分された上で、不図示の演算部にそれぞれ入力され、前記計測原理にしたがい回転軸体10の軸線方向および径方向の軸振れ量成分が求められる。
【0069】
実施形態4
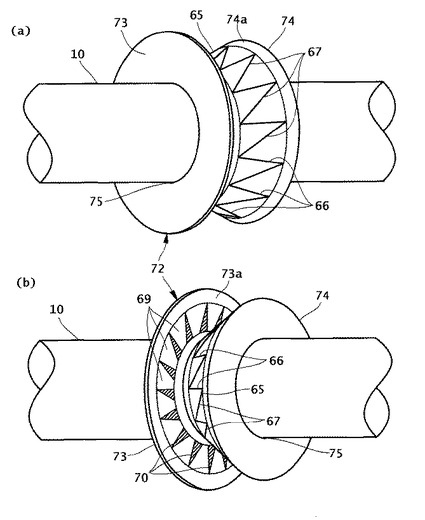
図15は、本発明の軸振れ計測装置に適用可能なターゲット体の別の具体例を示しており、(a)および(b)はこれをそれぞれ図に向かって左方向および右方向から回転軸体10の軸線方向に沿って見た斜視図である。この図に示すターゲット体は、回転軸体10の径方向に延設され、回転軸体10の軸線方向に直交する被照射面73aを有する鍔状部73と、回転軸体10に嵌装可能であり、回転軸体10の軸線方向に沿って被照射面73aの付け根から離隔する方向に連続的に拡径され、45[°]の傾斜の斜面を有する円錐筒状を呈し、その斜面に全周にわたり被照射面74aが形成された円錐鍔状部74とからなる。被照射面73aには、回転軸体10の回転中心を共通にし、当該回転軸体10よりも大径の同心円に沿って反射性幅変化部69と非反射性幅変化部70とが交互に繰り返し配置された反射パターン68(図13における反射パターン68と同様の構成である。)が形成されている。また、円錐斜面である被照射面74aには、光反射性の領域にその周方向に沿って非反射性区画線66,67が鋸刃状に繰り返し配置された反射パターン65(図13における反射パターン65と同様の構成である。)が形成されている。
【0070】
図16は、図15に示したターゲット体を本発明の軸振れ計測装置に適用した場合の使用状態を示す図である。この図に示すように、発光部3から出射された第1の光線L1は、光路の途中に当該光路に対して斜め45[°]に固定されたハーフミラー50を透過し、被照射面74aにおける反射パターン65の幅方向略中央位置に斜面に対して45[°]の角度にて照射される。回転軸体10とともにこのターゲット体が回転運動し、第1の光線L1はそれぞれの非反射性区画線66,67を横断する間は反射せず、それ以外の領域を走査する間、そこから反射する反射光L2は、鍔状部73の被照射面における反射パターン68の幅方向略中央位置に垂直に照射される。この反射パターン68では、光線が非反射性幅変化部73を走査する間は反射せず、反射性幅変化部69上を走査する間反射され、反射光L2の光路上を逆行し、再度反射パターン65において反射され、第1の光線L1の光路上を逆行し、ハーフミラー50によってその光路が直角に変更され、受光部5にて受光されるようになっている。受光部5では、点滅反射光の受光、不受光に応じた電気パルス信号を出力し、これを二分して演算部に入力することで、前記したように回転軸体10の回転中における軸線方向および径方向の軸振れ量成分が求められる。
【産業上の利用可能性】
【0071】
本発明の軸振れ量計測装置は、電動機などの回転機などが備える回転軸体から、発電プラントなどにおけるタービン軸に至る広範な回転軸体の軸線方向および径方向の軸振れ量、さらには軸ねじれ量を計測するのに有効に使用できる。
【符号の説明】
【0072】
1 軸振れ計測装置
3 発光部
4 受光・演算部
5、6、30、32 受光部
7、34 演算部
8a、8b、35a、35b 演算器
9a、36a 減算器
9b、36b 乗算器
10 回転軸体
11、25 光伝送手段(光ファイバーケーブル)
12、26 レンズ
13、14b、31、311、50、51 ハーフミラー
14a、312 反射ミラー(反射材)
15,27、28 集光レンズ
16、29、30 信号線
20、23、40、45、65 反射パターン
21、24 反射性幅変化部
22 非反射性幅変化部
41、46 反射性領域(被照射面)
42、43、48、66、67 光非反射性区画線
45a、45b ゾーン
47 二重線状の光非反射性区画線
50、51 ハーフミラー
52 反射ミラー(反射材)
60、72 ターゲット体
61 基材
62 接着層
73、74 鍔状部
73a、74a 被照射面
L1〜L10 光線(または反射光)
L11〜L17 光線(または反射光)
R 回転軸体の軸線方向の軸振れ量成分の合計値
θ 回転軸体の外周面に対する第2の光線の照射角度
△Y 回転軸体の径方向の軸振れ量成分
△Z 回転軸体の軸線方向の軸振れ量成分
【特許請求の範囲】
【請求項1】
被計測対象である回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が環状に形成されてなる反射パターンと、
前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1の光線および第2の光線と、
前記各所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じた電気パルス信号を生成し、当該電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の前記外周面に対する照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備えてなることを特徴とする軸振れ計測装置。
【請求項2】
前記第1の光線または前記第2の光線は、前記反射パターンに照射された前記第2の光線または前記第1の光線が、そこから反射されて光誘導手段によってその光路を変更された反射光である請求項1に記載の軸振れ計測装置。
【請求項3】
前記第1の光線および前記第2の光線は、互いに異なる入射角で前記反射パターンに照射されるように構成された請求項1または請求項2に記載の軸振れ計測装置。
【請求項4】
前記第1の光線は、前記反射パターンに対して略直角に照射されるように構成された請求項1〜3のいずれか1項に記載の軸振れ計測装置。
【請求項5】
前記環状の反射パターンは、前記各光線がそれぞれ照射されるように各別に形成されてなる請求項1〜4のいずれか1項に記載の軸振れ計測装置。
【請求項6】
前記環状の反射パターンは、前記回転軸体の外周面に環状に取り付け可能なターゲット体に設けられた少なくとも1つの被照射面に形成されてなる請求項1〜5のいずれか1項に記載の軸振れ計測装置。
【請求項1】
被計測対象である回転軸体の周方向に光反射性部分と光非反射性部分とが交互に配置されて当該方向に幅変化部の列が環状に形成されてなる反射パターンと、
前記回転軸体の回転中に前記反射パターンの所定位置に照射される第1の光線および第2の光線と、
前記各所定位置からのこれら各光線の反射光をそれぞれまたは重ね合わせた状態で受光して受光、不受光のタイミングに応じた電気パルス信号を生成し、当該電気パルス信号に現れる該第1の光線の受光時間の変化に基づいて前記回転軸体の軸線方向の軸振れ量成分を求めるとともに、前記第2の光線の前記外周面に対する照射角度、前記電気パルス信号に現れる前記第2の光線の反射光の受光時間の変化、および前記軸線方向の軸振れ量成分に基づいて前記回転軸体の径方向の軸振れ量成分を求める受光・演算部とを備えてなることを特徴とする軸振れ計測装置。
【請求項2】
前記第1の光線または前記第2の光線は、前記反射パターンに照射された前記第2の光線または前記第1の光線が、そこから反射されて光誘導手段によってその光路を変更された反射光である請求項1に記載の軸振れ計測装置。
【請求項3】
前記第1の光線および前記第2の光線は、互いに異なる入射角で前記反射パターンに照射されるように構成された請求項1または請求項2に記載の軸振れ計測装置。
【請求項4】
前記第1の光線は、前記反射パターンに対して略直角に照射されるように構成された請求項1〜3のいずれか1項に記載の軸振れ計測装置。
【請求項5】
前記環状の反射パターンは、前記各光線がそれぞれ照射されるように各別に形成されてなる請求項1〜4のいずれか1項に記載の軸振れ計測装置。
【請求項6】
前記環状の反射パターンは、前記回転軸体の外周面に環状に取り付け可能なターゲット体に設けられた少なくとも1つの被照射面に形成されてなる請求項1〜5のいずれか1項に記載の軸振れ計測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2010−276379(P2010−276379A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−126849(P2009−126849)
【出願日】平成21年5月26日(2009.5.26)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月26日(2009.5.26)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
[ Back to top ]