
軸流タービン
【課題】従来技術の軸流タービンの効率を改善すること。
【解決手段】軸流の順に低圧タービン部分およびタービン排気システムを含む軸流タービンにおいて、この低圧タービン部分には、最終低圧タービン段が含まれており、この最終低圧タービン段には、静翼形羽根が円周に沿って並んでいる列が含まれており、この列には回転翼形羽根が円周に沿って並んでいる列が軸方向に続いており、各翼形羽根は、半径方向内側のハブ領域と、半径方向外側のチップ領域とを有しており、各静翼形羽根の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、上記のハブ領域とチップ領域との間で、概ねW字形の分布にしたがい、上記の静翼形羽根の高さに沿って変化する。
【解決手段】軸流の順に低圧タービン部分およびタービン排気システムを含む軸流タービンにおいて、この低圧タービン部分には、最終低圧タービン段が含まれており、この最終低圧タービン段には、静翼形羽根が円周に沿って並んでいる列が含まれており、この列には回転翼形羽根が円周に沿って並んでいる列が軸方向に続いており、各翼形羽根は、半径方向内側のハブ領域と、半径方向外側のチップ領域とを有しており、各静翼形羽根の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、上記のハブ領域とチップ領域との間で、概ねW字形の分布にしたがい、上記の静翼形羽根の高さに沿って変化する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軸流タービンに関する。本発明の実施形態は、殊に、蒸気タービンの最終低圧タービン段内の翼形羽根の設計を改善した結果、効率が増大する軸流蒸気タービンに関する。
【背景技術】
【0002】
発電に使用される蒸気タービンにはふつう、高圧タービン部分と、オプションの中圧部分および低圧部分が含まれており、これらの部分は、軸流の順に配置されており、またそれぞれはタービン段の列を有する。各タービン部分のタービンを通って蒸気が膨張すると、蒸気の圧力および温度が下がり、低圧タービン部分の最終段を通って膨張した後、蒸気は、タービン排気システムを通って吐出される。
【0003】
殊に効率がわずかに増大しただけでも電力を製造するのに必要な燃料の量が大きく低減されることになり得る大発電設備では、蒸気タービンの効率は極めて重要である。これにより、極めて大きなコストが節約され、またCO2の放出が大きく低減され、これに伴ってSOxおよびNOxが相応に低減されるのである。このために相当な量の資金および努力が、翼形羽根設計の研究に継続的に費やされている。それは、翼形羽根設計が、タービン効率に大きな影響を及ぼすからである。
【0004】
上記の最終低圧タービン段およびタービン排気システムは共に性能に大きな影響を与え、したがって蒸気タービンの全体的な効率に影響を与える。従来の蒸気タービンの最終低圧タービン段に使用される翼形羽根設計は、多量の排出エネルギ(leaving energy)および不均一よどみ圧力分布を形成する傾向があり、これらは共に上記の最終低圧タービン段およびタービン排出システムの全体的な性能にとって好ましくない。
【0005】
したがって最終低圧タービン段が、タービン排出システムに最小量の排出エネルギを送出し、タービン排出システムの入口において一層理想に近いよどみ圧力分布を形成できることになれば好都合である。この理想的な圧力分布は、最終低圧タービン段における翼形羽根の高さにわたってほぼ一定であり、チップ領域に向かってわずかに増大する。
【0006】
上記のハブ領域とチップ領域との間で半径方向の高さが増大する翼形羽根は、最終低圧タービン段の排出エネルギを低減し、ひいてはこの最終低圧ター分段の効率を増大させることを試すために使用されている。しかしながら、これによって得ることができたのは、最終低圧タービン段の回転翼形羽根の高さ(H)に対する、排気システムの軸長(L)の比(すなわちL/H)が極めて小さくなったタービン排気システムである。ふつうタービン排気システムの軸長(L)を増大することはいくつかの理由から望ましくないが、殊に蒸気タービンのコンパクトさをどのように低減したとしても、その設置占有面積が増大し、したがった据え付けコストが増大してしまうため、望ましくない。
【0007】
定義
この明細書全体にわたってつぎの定義を使用する。
【0008】
翼形羽根の半径方向に見て最も内側の端部は、それが静翼形羽根か回転翼形羽根であるかにかかわらず、「ハブ領域」と称される(またふつうルートとして知られている)のに対し、翼形羽根の半径方向に見て最も外側の端部は、静翼形羽根か回転翼形羽根であるかにかかわらず、「チップ領域」と称される。
【0009】
翼形羽根の「圧力面」は、その凹部側であり、「吸込面」は、その凸部側である。
【0010】
翼形羽根の羽根出口角(α)は、作動流体が、円周に沿って配置された羽根の列を離れる、ロータの円周方向を基準にした角度であり、つぎの関係式から得られる、すなわち、
α=sin-1K
であり、ただし
K=スロート寸法(t)/ピッチ寸法(p)である。
【0011】
このスロート寸法(t)は、翼形羽根後縁から、同じ列の隣り合う翼形羽根の吸込面に垂直に延びる最短の線として定義されるのに対し、ピッチ寸法(p)は、1つの翼形羽根後縁から、同じ列の隣り合う翼形羽根後縁に至る円周に沿った距離であり、この距離は、この翼形羽根のハブ領域から所定の半径方向の間隔で計測したものである。
【0012】
式AN2は、低圧タービン部分の出口において最終低圧タービン段の回転翼形羽根によって環状に掃かれる領域(A)と、回転翼形羽根の回転速度(N)の二乗との積である。上記の環状領域(A)は、回転翼形羽根の内径および外径によって描かれる円のエリアにおける差分として定義される。
【0013】
翼形羽根の「軸方向幅(W)」は、この翼形羽根の前縁と後縁との間の軸方向の間隔(すなわち、このタービンの回転軸に沿って測定した前縁と後縁との間の距離)である。
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明の課題は、従来技術の軸流タービンの効率を改善することである。
【課題を解決するための手段】
【0015】
上記の課題は、本発明の請求項1により、軸流の順に低圧タービン部分およびタービン排気システムを含む軸流タービンにおいて、この低圧タービン部分には、最終低圧タービン段が含まれており、この最終低圧タービン段には、静翼形羽根が円周に沿って並んでいる列が含まれており、この列には回転翼形羽根が円周に沿って並んでいる列が軸方向に続いており、各翼形羽根は、半径方向内側のハブ領域と、半径方向外側のチップ領域とを有しており、各静翼形羽根の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、上記のハブ領域とチップ領域との間で、概ねW字形の分布にしたがい、上記の静翼形羽根の高さに沿って変化することを特徴とする軸流によって解決される。
【図面の簡単な説明】
【0016】
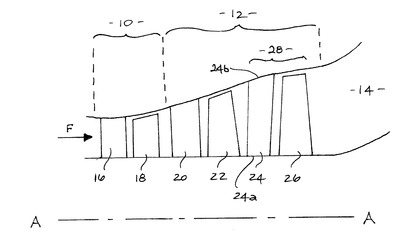
【図1】軸流タービンの流れ方向を通る概略軸方向断面図である。
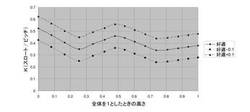
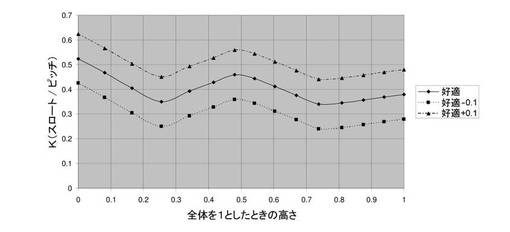
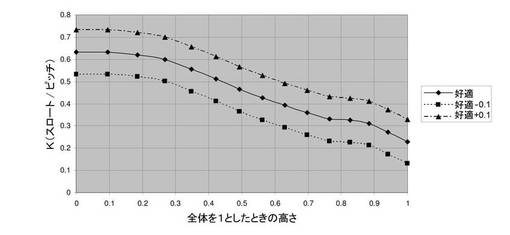
【図2】軸流タービンの最終低圧タービン段における静翼形羽根の高さに対してK値の変化を示すグラフである。
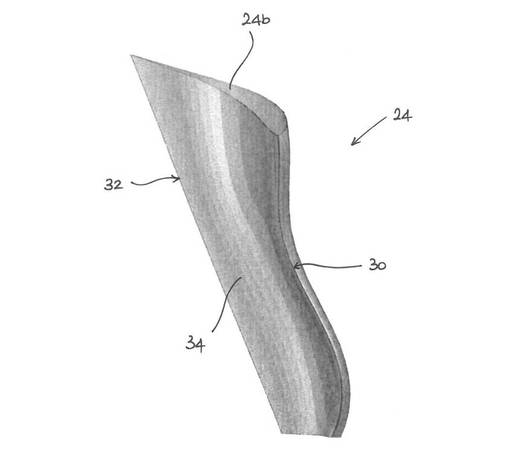
【図3】静翼形羽根の高さ方向に沿ってK値がW字状に分布する静翼形羽根の一部分を示す斜視図である。
【図4】軸流タービンの最終低圧タービン段における回転翼形羽根の高さに対してK値の変化を示すグラフである。
【発明を実施するための形態】
【0017】
上記の軸流タービンは、蒸気タービンとすることが可能である。
【0018】
上記のK値に対して概ねW字形の分布を採用することにより、上記の最終低圧タービン段からタービン排気システムにされる排出エネルギが最小化される。また排気システムの入口において理想的な圧力分布が得られ、殊に翼形羽根の高さにわたって均一でありかつチップ領域に向かってわずかに増大する圧力分布が得られる。
【0019】
したがって、例えばおよそ125m/sの低い排気速度条件において、最終低圧タービン段の全圧−全圧効率(total-to-total efficiency)が大きく改善されるにもかかわらず、例えばおよそ300m/sの高い排気速度条件において全圧−全圧効率が大きく低減されることはない。このことは極めて有利である。それは従来の蒸気タービンの最終低圧タービン段の全圧−全圧効率は、よそ170m/s以下の排気速度において急速に低下する傾向があるからである。実際に従来の蒸気タービンの最終低圧タービン段の十分な性能は、およそ150m/s以下の排気速度ではふつう保証されない。
【0020】
各静翼形羽根のK値は、静翼形羽根の高さ方向に沿って、以下の表1に定義される値Kstat minとKstat maxとの間で変化して、概ねW字形をしたK値の分布が得られる。
【0021】
各静翼形羽根の最適K値Kstat optは、静翼形羽根の高さ方向に沿って、以下の表2に定義される概ねW字形をしたK値の分布にしたがって変化し得る。静翼形羽根に沿った所定の高さにおける値Kstat minおよびKstat maxは、上記の最適値Kstat opt±0.1に等しい。
【0022】
各静翼形羽根は、16度と25度との間の後縁傾斜角を有し得る。ふつう各静翼形羽根は、約19度の後縁傾斜角を有する。いくつかの実施形態では上記の後縁傾斜角は19.2度とすることができる。
【0023】
いくつかの実施形態では、各静翼形羽根は、半径方向に隣り合う複数の翼形部分を含むことができ、これらの翼形部分は、静翼形羽根の後縁に沿った直線上に積み重ねることができる。別の複数の実施形態において、上記の翼形部分は、静翼形羽根の前縁に沿った直線上に積み重ねるか、または静翼形羽根の重心を通る直線に沿って積み重ねることができる。当然のことながら、別の積み重ね配置もすべて請求した本発明の範囲に含まれる。
【0024】
各静翼形羽根はふつう、上記のハブ領域とチップ領域との間で、静翼形羽根の高さに沿って翼形断面が変化し得るタイプの静翼形羽根である。
【0025】
各回転翼形羽根のK値は、回転翼形羽根の高さ方向に沿って、以下の表3に定義される値Krot minとKrot maxとの間で変化して、所望のK値の分布が得られる。各回転翼形羽根の最適K値Krot optは、回転翼形羽根の高さ方向に沿い、以下の表4に定義されるK値の分布にしたがって変化する。回転翼形羽根に沿った所定の高さにおける値Krot minおよびKrot maxは、上記の最適値Krot opt±0.1に等しい。
【0026】
回転翼形羽根毎に表4に定義される最適分布Krot optにより、静翼形羽根毎に表2に定義される最適な概ねW字形をした分布Kstat optが補われる。このような配置構成により、翼形羽根の半径方向の高さにわたり、最終低圧タービン段を通る流体の流れが最適化される。
【0027】
各回転翼形羽根はふつう、ハブ領域における最大軸幅と、チップ領域における最小軸幅との間で半径方向にテーパ状になっている。
【実施例】
【0028】
以下では添付の図面を参照し、本発明の実施形態を単なる例として示す。
【0029】
図1には蒸気タービンの流路を通る概略軸断面図が示されている。環状流路を通る作動流体すなわち蒸気の流れ方向Fは、概ねタービンロータ軸A−Aに平行である。図示した蒸気タービンには、軸流の順で高圧(HP)タービン部分10、低圧タービン部分12および排気システム14が含まれている。別の実施形態では中圧(IP)タービン部分を設けることができる。蒸気タービンは、従来のように動作して、蒸気はHPタービン部分10およびLPタービン部分12を通って膨張し、最終的にはタービン排気部分14を通って圧縮機に吐出される。
【0030】
HPタービン部分10には、静翼形羽根16が円周に沿って並んでいる列が含まれており、この列には、回転翼形羽根18が円周に沿って並んでいる列が、軸方向に続いている。静翼形羽根16が円周に沿って並んでいる列と、回転翼形羽根18が円周に沿って並んでいる列とは一緒になってHPタービン段を形成する。分かり易くするため、上記のHPタービン部分10には1つのHPタービン段しか示されていないが、実際にはふつう複数のHPタービン段が設けられる。
【0031】
LPタービン部分12には、静翼形羽根20,24が円周に沿って並んでいる2つの列が含まれており、これらの各列には、回転翼形羽根22,26が円周に沿って並んでいるそれぞれ列が軸方向に続いている。軸方向に見て連続している、静翼形羽根および回転翼形羽根が円周に沿って並んでいる列20および22、24および26はそれぞれ複数のLPタービン段を構成している。静翼形羽根24が円周に沿って並んでいる列と、回転翼形羽根26が円周に沿って並んでいる列とによって形成されるLPタービン段は、最終LPタービン段28である。環状流路に沿って流れる蒸気は、最終LPタービン段28からタービン排出システム14に送出される。わかり易くするため、ここではLPタービン部分12には2つのLPタービン段だけしか示されていないが、ふつうはより多くのLPタービン段が設けられる。
【0032】
上で示したように最終LPタービン段28からタービン排気システム14に送出される蒸気は、蒸気タービンの動作効率を最大化するため、理想の流れ特性を有するようにしたい。最終LPタービン段28の回転翼形羽根26が取り付けられている軸方向位置において約2.03メートル(80インチ)のハブ直径を有する蒸気タービンでは、直径比が大きくまたパラメタAN2の値が大きいことに起因して、従来のアプローチを使用した場合、理想的な流れ特性を達成することはむずかしい。ここで上記の最終LPタービン段28では、回転翼形羽根26の高さは約1.27メートル(50インチ)であり、回転速度は、3,000回/分である。本発明の複数の実施形態によって可能になるのは、最終LPタービン段28の静翼形羽根24の高さ方向に沿い、ハブ領域24aとチップ領域24bとの間で、概ねW字形をしたK値分布を設けることにより、上記の流れ特性を最適化することである。
【0033】
上記の蒸気タービンの最終LPタービン段28の静翼形羽根24に対して、概ねW字形の有利なK値分布(Kstat opt)は、以下の表2に示されており、また図2にグラフで示されている。このK値分布により、最終LPタービン段28からタービン排出システム14への最適な蒸気の流れ特性が得られるが、与えられた半径方向高さにおける値Kstat optは、各静翼形羽根24に沿って±0.1だけ変化することがあり、これにより、例えば、以下の表1に定義したW字形の分布Kstat minおよびKstat maxが得られる。またこれは図2にもグラフで示されている。
【0034】
以下の表2に定義されかつ概ねW字形をした分布Kstat optにしたがってK値が変化し、したがって前縁30が概ねW字形をした幾何学形状プロフィールを有する最終LPタービン段28の静翼形羽根24のうちの1つの部分を説明する図3を参照すると、(変化する陰影によって概略的に示した)等圧線図により、静翼形羽根24の圧力面34において、後縁32に沿い、半径方向に実質的に均一な圧力分布が示されることがわかる。この均一な半径方向の圧力分布と、概ねW字形をしたK値分布によって得られる最小化排出エネルギとにより、最終LPタービン28段の全圧−静圧効率(total-to-static efficiency)および全圧−全圧効率が改善され、したがって蒸気タービンの全体的な効率が改善される。
【0035】
静翼形羽根24は、半径方向に積み重ねた複数の翼形部分によって形成され、これらの部分は、ハブ領域24aとチップ領域24bとの間で、静翼形羽根24の高さ方向に沿って断面が変化する。図2を参照して説明されかつ図3に図示された実施形態においてわかるのは、翼形部分が、静翼形羽根24の後縁32に沿った直線上に積み重ねられることである。また静翼形羽根24は、約19.2°の後縁傾斜角を有しているが、この後縁傾斜角は、実際には16°と25°との間で変化し得る。
【0036】
最終LPタービン段28の静翼形羽根24の高さ方向に沿いかつ概ねW字形をしたK値分布を補うため、最終LPタービン段28の回転翼形羽根26のK値も最適化され、これにより、回転翼形羽根26から排気システム14に送出される蒸気が理想的な流れ特性を有するようにする。K値(Krot opt)の有利な分布は以下の表に定義されており、また図4にグラフで示されている。この有利な分布により、最終LPタービン段28からタービン排出システム14に至る出口における最適な蒸気の流れ特性が得られるが、与えられた半径方向高さにおける値Krot optは、各静翼形羽根26に沿って±0.1で変化することがあり、これにより、例えば、以下の表3に定義した分布Krot minおよびKrot maxが得られる。またこのことは図4にグラフで示されている。
【0037】
上の段落では本発明の複数の実施形態を示してきたが、添付の特許請求の範囲を逸脱することなくこれらの実施形態にさまざまな変更を行い得ることは明らかである。
【0038】
【表1】

【0039】
【表2】
【0040】
【表3】
【0041】
【表4】
【符号の説明】
【0042】
10 高圧(HP)タービン部分、 12 低圧(LP)タービン部分、 14 タービン排気部分、 16,20,24 静翼形羽根、 18,22,26 回転翼形羽根、 24a ハブ領域、 24b チップ領域、 28 最終低圧(LP)タービン段、 30 前縁、 32 後縁、 34 圧力面
【技術分野】
【0001】
本発明は、軸流タービンに関する。本発明の実施形態は、殊に、蒸気タービンの最終低圧タービン段内の翼形羽根の設計を改善した結果、効率が増大する軸流蒸気タービンに関する。
【背景技術】
【0002】
発電に使用される蒸気タービンにはふつう、高圧タービン部分と、オプションの中圧部分および低圧部分が含まれており、これらの部分は、軸流の順に配置されており、またそれぞれはタービン段の列を有する。各タービン部分のタービンを通って蒸気が膨張すると、蒸気の圧力および温度が下がり、低圧タービン部分の最終段を通って膨張した後、蒸気は、タービン排気システムを通って吐出される。
【0003】
殊に効率がわずかに増大しただけでも電力を製造するのに必要な燃料の量が大きく低減されることになり得る大発電設備では、蒸気タービンの効率は極めて重要である。これにより、極めて大きなコストが節約され、またCO2の放出が大きく低減され、これに伴ってSOxおよびNOxが相応に低減されるのである。このために相当な量の資金および努力が、翼形羽根設計の研究に継続的に費やされている。それは、翼形羽根設計が、タービン効率に大きな影響を及ぼすからである。
【0004】
上記の最終低圧タービン段およびタービン排気システムは共に性能に大きな影響を与え、したがって蒸気タービンの全体的な効率に影響を与える。従来の蒸気タービンの最終低圧タービン段に使用される翼形羽根設計は、多量の排出エネルギ(leaving energy)および不均一よどみ圧力分布を形成する傾向があり、これらは共に上記の最終低圧タービン段およびタービン排出システムの全体的な性能にとって好ましくない。
【0005】
したがって最終低圧タービン段が、タービン排出システムに最小量の排出エネルギを送出し、タービン排出システムの入口において一層理想に近いよどみ圧力分布を形成できることになれば好都合である。この理想的な圧力分布は、最終低圧タービン段における翼形羽根の高さにわたってほぼ一定であり、チップ領域に向かってわずかに増大する。
【0006】
上記のハブ領域とチップ領域との間で半径方向の高さが増大する翼形羽根は、最終低圧タービン段の排出エネルギを低減し、ひいてはこの最終低圧ター分段の効率を増大させることを試すために使用されている。しかしながら、これによって得ることができたのは、最終低圧タービン段の回転翼形羽根の高さ(H)に対する、排気システムの軸長(L)の比(すなわちL/H)が極めて小さくなったタービン排気システムである。ふつうタービン排気システムの軸長(L)を増大することはいくつかの理由から望ましくないが、殊に蒸気タービンのコンパクトさをどのように低減したとしても、その設置占有面積が増大し、したがった据え付けコストが増大してしまうため、望ましくない。
【0007】
定義
この明細書全体にわたってつぎの定義を使用する。
【0008】
翼形羽根の半径方向に見て最も内側の端部は、それが静翼形羽根か回転翼形羽根であるかにかかわらず、「ハブ領域」と称される(またふつうルートとして知られている)のに対し、翼形羽根の半径方向に見て最も外側の端部は、静翼形羽根か回転翼形羽根であるかにかかわらず、「チップ領域」と称される。
【0009】
翼形羽根の「圧力面」は、その凹部側であり、「吸込面」は、その凸部側である。
【0010】
翼形羽根の羽根出口角(α)は、作動流体が、円周に沿って配置された羽根の列を離れる、ロータの円周方向を基準にした角度であり、つぎの関係式から得られる、すなわち、
α=sin-1K
であり、ただし
K=スロート寸法(t)/ピッチ寸法(p)である。
【0011】
このスロート寸法(t)は、翼形羽根後縁から、同じ列の隣り合う翼形羽根の吸込面に垂直に延びる最短の線として定義されるのに対し、ピッチ寸法(p)は、1つの翼形羽根後縁から、同じ列の隣り合う翼形羽根後縁に至る円周に沿った距離であり、この距離は、この翼形羽根のハブ領域から所定の半径方向の間隔で計測したものである。
【0012】
式AN2は、低圧タービン部分の出口において最終低圧タービン段の回転翼形羽根によって環状に掃かれる領域(A)と、回転翼形羽根の回転速度(N)の二乗との積である。上記の環状領域(A)は、回転翼形羽根の内径および外径によって描かれる円のエリアにおける差分として定義される。
【0013】
翼形羽根の「軸方向幅(W)」は、この翼形羽根の前縁と後縁との間の軸方向の間隔(すなわち、このタービンの回転軸に沿って測定した前縁と後縁との間の距離)である。
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明の課題は、従来技術の軸流タービンの効率を改善することである。
【課題を解決するための手段】
【0015】
上記の課題は、本発明の請求項1により、軸流の順に低圧タービン部分およびタービン排気システムを含む軸流タービンにおいて、この低圧タービン部分には、最終低圧タービン段が含まれており、この最終低圧タービン段には、静翼形羽根が円周に沿って並んでいる列が含まれており、この列には回転翼形羽根が円周に沿って並んでいる列が軸方向に続いており、各翼形羽根は、半径方向内側のハブ領域と、半径方向外側のチップ領域とを有しており、各静翼形羽根の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、上記のハブ領域とチップ領域との間で、概ねW字形の分布にしたがい、上記の静翼形羽根の高さに沿って変化することを特徴とする軸流によって解決される。
【図面の簡単な説明】
【0016】
【図1】軸流タービンの流れ方向を通る概略軸方向断面図である。
【図2】軸流タービンの最終低圧タービン段における静翼形羽根の高さに対してK値の変化を示すグラフである。
【図3】静翼形羽根の高さ方向に沿ってK値がW字状に分布する静翼形羽根の一部分を示す斜視図である。
【図4】軸流タービンの最終低圧タービン段における回転翼形羽根の高さに対してK値の変化を示すグラフである。
【発明を実施するための形態】
【0017】
上記の軸流タービンは、蒸気タービンとすることが可能である。
【0018】
上記のK値に対して概ねW字形の分布を採用することにより、上記の最終低圧タービン段からタービン排気システムにされる排出エネルギが最小化される。また排気システムの入口において理想的な圧力分布が得られ、殊に翼形羽根の高さにわたって均一でありかつチップ領域に向かってわずかに増大する圧力分布が得られる。
【0019】
したがって、例えばおよそ125m/sの低い排気速度条件において、最終低圧タービン段の全圧−全圧効率(total-to-total efficiency)が大きく改善されるにもかかわらず、例えばおよそ300m/sの高い排気速度条件において全圧−全圧効率が大きく低減されることはない。このことは極めて有利である。それは従来の蒸気タービンの最終低圧タービン段の全圧−全圧効率は、よそ170m/s以下の排気速度において急速に低下する傾向があるからである。実際に従来の蒸気タービンの最終低圧タービン段の十分な性能は、およそ150m/s以下の排気速度ではふつう保証されない。
【0020】
各静翼形羽根のK値は、静翼形羽根の高さ方向に沿って、以下の表1に定義される値Kstat minとKstat maxとの間で変化して、概ねW字形をしたK値の分布が得られる。
【0021】
各静翼形羽根の最適K値Kstat optは、静翼形羽根の高さ方向に沿って、以下の表2に定義される概ねW字形をしたK値の分布にしたがって変化し得る。静翼形羽根に沿った所定の高さにおける値Kstat minおよびKstat maxは、上記の最適値Kstat opt±0.1に等しい。
【0022】
各静翼形羽根は、16度と25度との間の後縁傾斜角を有し得る。ふつう各静翼形羽根は、約19度の後縁傾斜角を有する。いくつかの実施形態では上記の後縁傾斜角は19.2度とすることができる。
【0023】
いくつかの実施形態では、各静翼形羽根は、半径方向に隣り合う複数の翼形部分を含むことができ、これらの翼形部分は、静翼形羽根の後縁に沿った直線上に積み重ねることができる。別の複数の実施形態において、上記の翼形部分は、静翼形羽根の前縁に沿った直線上に積み重ねるか、または静翼形羽根の重心を通る直線に沿って積み重ねることができる。当然のことながら、別の積み重ね配置もすべて請求した本発明の範囲に含まれる。
【0024】
各静翼形羽根はふつう、上記のハブ領域とチップ領域との間で、静翼形羽根の高さに沿って翼形断面が変化し得るタイプの静翼形羽根である。
【0025】
各回転翼形羽根のK値は、回転翼形羽根の高さ方向に沿って、以下の表3に定義される値Krot minとKrot maxとの間で変化して、所望のK値の分布が得られる。各回転翼形羽根の最適K値Krot optは、回転翼形羽根の高さ方向に沿い、以下の表4に定義されるK値の分布にしたがって変化する。回転翼形羽根に沿った所定の高さにおける値Krot minおよびKrot maxは、上記の最適値Krot opt±0.1に等しい。
【0026】
回転翼形羽根毎に表4に定義される最適分布Krot optにより、静翼形羽根毎に表2に定義される最適な概ねW字形をした分布Kstat optが補われる。このような配置構成により、翼形羽根の半径方向の高さにわたり、最終低圧タービン段を通る流体の流れが最適化される。
【0027】
各回転翼形羽根はふつう、ハブ領域における最大軸幅と、チップ領域における最小軸幅との間で半径方向にテーパ状になっている。
【実施例】
【0028】
以下では添付の図面を参照し、本発明の実施形態を単なる例として示す。
【0029】
図1には蒸気タービンの流路を通る概略軸断面図が示されている。環状流路を通る作動流体すなわち蒸気の流れ方向Fは、概ねタービンロータ軸A−Aに平行である。図示した蒸気タービンには、軸流の順で高圧(HP)タービン部分10、低圧タービン部分12および排気システム14が含まれている。別の実施形態では中圧(IP)タービン部分を設けることができる。蒸気タービンは、従来のように動作して、蒸気はHPタービン部分10およびLPタービン部分12を通って膨張し、最終的にはタービン排気部分14を通って圧縮機に吐出される。
【0030】
HPタービン部分10には、静翼形羽根16が円周に沿って並んでいる列が含まれており、この列には、回転翼形羽根18が円周に沿って並んでいる列が、軸方向に続いている。静翼形羽根16が円周に沿って並んでいる列と、回転翼形羽根18が円周に沿って並んでいる列とは一緒になってHPタービン段を形成する。分かり易くするため、上記のHPタービン部分10には1つのHPタービン段しか示されていないが、実際にはふつう複数のHPタービン段が設けられる。
【0031】
LPタービン部分12には、静翼形羽根20,24が円周に沿って並んでいる2つの列が含まれており、これらの各列には、回転翼形羽根22,26が円周に沿って並んでいるそれぞれ列が軸方向に続いている。軸方向に見て連続している、静翼形羽根および回転翼形羽根が円周に沿って並んでいる列20および22、24および26はそれぞれ複数のLPタービン段を構成している。静翼形羽根24が円周に沿って並んでいる列と、回転翼形羽根26が円周に沿って並んでいる列とによって形成されるLPタービン段は、最終LPタービン段28である。環状流路に沿って流れる蒸気は、最終LPタービン段28からタービン排出システム14に送出される。わかり易くするため、ここではLPタービン部分12には2つのLPタービン段だけしか示されていないが、ふつうはより多くのLPタービン段が設けられる。
【0032】
上で示したように最終LPタービン段28からタービン排気システム14に送出される蒸気は、蒸気タービンの動作効率を最大化するため、理想の流れ特性を有するようにしたい。最終LPタービン段28の回転翼形羽根26が取り付けられている軸方向位置において約2.03メートル(80インチ)のハブ直径を有する蒸気タービンでは、直径比が大きくまたパラメタAN2の値が大きいことに起因して、従来のアプローチを使用した場合、理想的な流れ特性を達成することはむずかしい。ここで上記の最終LPタービン段28では、回転翼形羽根26の高さは約1.27メートル(50インチ)であり、回転速度は、3,000回/分である。本発明の複数の実施形態によって可能になるのは、最終LPタービン段28の静翼形羽根24の高さ方向に沿い、ハブ領域24aとチップ領域24bとの間で、概ねW字形をしたK値分布を設けることにより、上記の流れ特性を最適化することである。
【0033】
上記の蒸気タービンの最終LPタービン段28の静翼形羽根24に対して、概ねW字形の有利なK値分布(Kstat opt)は、以下の表2に示されており、また図2にグラフで示されている。このK値分布により、最終LPタービン段28からタービン排出システム14への最適な蒸気の流れ特性が得られるが、与えられた半径方向高さにおける値Kstat optは、各静翼形羽根24に沿って±0.1だけ変化することがあり、これにより、例えば、以下の表1に定義したW字形の分布Kstat minおよびKstat maxが得られる。またこれは図2にもグラフで示されている。
【0034】
以下の表2に定義されかつ概ねW字形をした分布Kstat optにしたがってK値が変化し、したがって前縁30が概ねW字形をした幾何学形状プロフィールを有する最終LPタービン段28の静翼形羽根24のうちの1つの部分を説明する図3を参照すると、(変化する陰影によって概略的に示した)等圧線図により、静翼形羽根24の圧力面34において、後縁32に沿い、半径方向に実質的に均一な圧力分布が示されることがわかる。この均一な半径方向の圧力分布と、概ねW字形をしたK値分布によって得られる最小化排出エネルギとにより、最終LPタービン28段の全圧−静圧効率(total-to-static efficiency)および全圧−全圧効率が改善され、したがって蒸気タービンの全体的な効率が改善される。
【0035】
静翼形羽根24は、半径方向に積み重ねた複数の翼形部分によって形成され、これらの部分は、ハブ領域24aとチップ領域24bとの間で、静翼形羽根24の高さ方向に沿って断面が変化する。図2を参照して説明されかつ図3に図示された実施形態においてわかるのは、翼形部分が、静翼形羽根24の後縁32に沿った直線上に積み重ねられることである。また静翼形羽根24は、約19.2°の後縁傾斜角を有しているが、この後縁傾斜角は、実際には16°と25°との間で変化し得る。
【0036】
最終LPタービン段28の静翼形羽根24の高さ方向に沿いかつ概ねW字形をしたK値分布を補うため、最終LPタービン段28の回転翼形羽根26のK値も最適化され、これにより、回転翼形羽根26から排気システム14に送出される蒸気が理想的な流れ特性を有するようにする。K値(Krot opt)の有利な分布は以下の表に定義されており、また図4にグラフで示されている。この有利な分布により、最終LPタービン段28からタービン排出システム14に至る出口における最適な蒸気の流れ特性が得られるが、与えられた半径方向高さにおける値Krot optは、各静翼形羽根26に沿って±0.1で変化することがあり、これにより、例えば、以下の表3に定義した分布Krot minおよびKrot maxが得られる。またこのことは図4にグラフで示されている。
【0037】
上の段落では本発明の複数の実施形態を示してきたが、添付の特許請求の範囲を逸脱することなくこれらの実施形態にさまざまな変更を行い得ることは明らかである。
【0038】
【表1】
【0039】
【表2】
【0040】
【表3】
【0041】
【表4】
【符号の説明】
【0042】
10 高圧(HP)タービン部分、 12 低圧(LP)タービン部分、 14 タービン排気部分、 16,20,24 静翼形羽根、 18,22,26 回転翼形羽根、 24a ハブ領域、 24b チップ領域、 28 最終低圧(LP)タービン段、 30 前縁、 32 後縁、 34 圧力面
【特許請求の範囲】
【請求項1】
軸流の順に低圧タービン部分(12)およびタービン排気システム(14)を含む軸流タービンにおいて、
前記の低圧タービン部分(12)には、最終低圧タービン段(28)が含まれており、
当該の最終低圧タービン段には、静翼形羽根(24)が円周に沿って並んでいる列が含まれており、当該列には、回転翼形羽根(26)が円周に沿って並んでいる列が軸方向に続いており、
各翼形羽根は、半径方向内側のハブ領域(24a)と、半径方向外側のチップ領域(24b)とを有しており、
各静翼形羽根(24)の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、前記のハブ領域(24a)とチップ領域(24b)との間で、概ねW字形の分布にしたがい、前記の静翼形羽根(24)の高さに沿って変化することを特徴とする
軸流タービン。
【請求項2】
前記の各静翼形羽根(24)のK値は、表1に定義された概ねW字形の分布にしたがい、Kstat minと、Kstat maxとの間で、静翼形羽根(24)の高さ方向に沿って変化する、
請求項1に記載の軸流タービン。
【請求項3】
前記の各静翼形羽根(24)の最適K値Kstat optは、表2に定義された概ねW字形の分布にしたがい、静翼形羽根(24)の高さ方向に沿って変化する、
請求項1に記載の軸流タービン。
【請求項4】
各静翼形羽根(24)は、16度と25度との間の後縁(32)傾斜角を有する、
請求項1から3までのいずれか1項に記載の軸流タービン。
【請求項5】
各静翼形羽根(24)は、約19度の後縁(32)傾斜角を有する、
請求項4に記載の軸流タービン。
【請求項6】
各静翼形羽根(24)には、当該静翼形羽根(24)の後縁(32)に沿った直線上で積み重ねられかつ半径方向に隣り合う複数の翼形部分が含まれている。
請求項1から5までのいずれか1項に記載の軸流タービン。
【請求項7】
前記の各回転翼形羽根(26)のK値は、回転翼形羽根(26)の高さ方向に沿い、Krot minと、Krot maxとの間で、表3に定義された分布にしたがって変化する、
請求項1から6までのいずれか1項に記載の軸流タービン。
【請求項8】
前記の各回転翼形羽根(26)の最適K値Krot optは、回転翼形羽根(26)の高さ方向に沿い、表4に定義された分布にしたがって変化する、
請求項1から6までのいずれか1項に記載の軸流タービン。
【請求項9】
各回転翼形羽根(26)は、ハブ領域における最大軸幅と、チップ領域における最小軸幅との間で半径方向にテーパ状になっている、
請求項1から8までのいずれか1項に記載の軸流タービン。
【請求項10】
前記の軸流タービンは、蒸気タービンである、
請求項1から9までのいずれか1項に記載の軸流タービン。
【請求項1】
軸流の順に低圧タービン部分(12)およびタービン排気システム(14)を含む軸流タービンにおいて、
前記の低圧タービン部分(12)には、最終低圧タービン段(28)が含まれており、
当該の最終低圧タービン段には、静翼形羽根(24)が円周に沿って並んでいる列が含まれており、当該列には、回転翼形羽根(26)が円周に沿って並んでいる列が軸方向に続いており、
各翼形羽根は、半径方向内側のハブ領域(24a)と、半径方向外側のチップ領域(24b)とを有しており、
各静翼形羽根(24)の、ピッチ寸法(p)に対するスロート寸法(t)の比に等しいK値は、前記のハブ領域(24a)とチップ領域(24b)との間で、概ねW字形の分布にしたがい、前記の静翼形羽根(24)の高さに沿って変化することを特徴とする
軸流タービン。
【請求項2】
前記の各静翼形羽根(24)のK値は、表1に定義された概ねW字形の分布にしたがい、Kstat minと、Kstat maxとの間で、静翼形羽根(24)の高さ方向に沿って変化する、
請求項1に記載の軸流タービン。
【請求項3】
前記の各静翼形羽根(24)の最適K値Kstat optは、表2に定義された概ねW字形の分布にしたがい、静翼形羽根(24)の高さ方向に沿って変化する、
請求項1に記載の軸流タービン。
【請求項4】
各静翼形羽根(24)は、16度と25度との間の後縁(32)傾斜角を有する、
請求項1から3までのいずれか1項に記載の軸流タービン。
【請求項5】
各静翼形羽根(24)は、約19度の後縁(32)傾斜角を有する、
請求項4に記載の軸流タービン。
【請求項6】
各静翼形羽根(24)には、当該静翼形羽根(24)の後縁(32)に沿った直線上で積み重ねられかつ半径方向に隣り合う複数の翼形部分が含まれている。
請求項1から5までのいずれか1項に記載の軸流タービン。
【請求項7】
前記の各回転翼形羽根(26)のK値は、回転翼形羽根(26)の高さ方向に沿い、Krot minと、Krot maxとの間で、表3に定義された分布にしたがって変化する、
請求項1から6までのいずれか1項に記載の軸流タービン。
【請求項8】
前記の各回転翼形羽根(26)の最適K値Krot optは、回転翼形羽根(26)の高さ方向に沿い、表4に定義された分布にしたがって変化する、
請求項1から6までのいずれか1項に記載の軸流タービン。
【請求項9】
各回転翼形羽根(26)は、ハブ領域における最大軸幅と、チップ領域における最小軸幅との間で半径方向にテーパ状になっている、
請求項1から8までのいずれか1項に記載の軸流タービン。
【請求項10】
前記の軸流タービンは、蒸気タービンである、
請求項1から9までのいずれか1項に記載の軸流タービン。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−154332(P2012−154332A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2012−11418(P2012−11418)
【出願日】平成24年1月23日(2012.1.23)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成24年1月23日(2012.1.23)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]