
軸流ターボ機械用のエーロフォイル羽根
【課題】軸流ターボ機械用のエーロフォイル羽根を提供する。
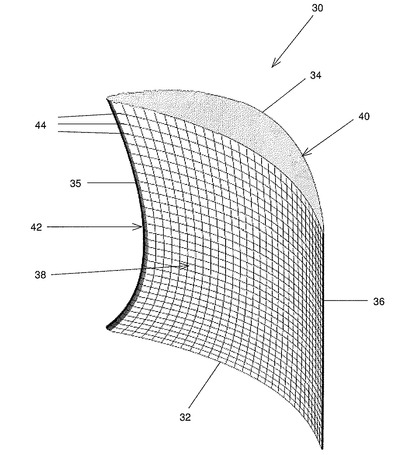
【解決手段】軸流ターボ機械内に配置されるエーロフォイル羽根30が、半径方向内側のプラットフォーム領域32と、半径方向外側の先端領域34と、軸方向前側の前縁35と、軸方向後側の後縁36とを有し、後縁36が、プラットフォーム領域32と先端領域34の間で直線状であり、環状経路の半径方向に向きを定められる。エーロフォイル羽根30が、プラットフォーム領域32と先端領域34の間で半径方向で凸形の圧力面38と、プラットフォーム領域32と先端領域34の間で半径方向で凹形の吸込面40とを有する。前縁35と直線状の後縁36の間の軸方向距離であるエーロフォイル羽根30の軸方向幅Wが、プラットフォーム領域32および先端領域34での最大軸方向幅Wmaxと、プラットフォーム領域32と先端領域34の間の位置での最小軸方向幅Wminとの間で放物線状に変化する。
【解決手段】軸流ターボ機械内に配置されるエーロフォイル羽根30が、半径方向内側のプラットフォーム領域32と、半径方向外側の先端領域34と、軸方向前側の前縁35と、軸方向後側の後縁36とを有し、後縁36が、プラットフォーム領域32と先端領域34の間で直線状であり、環状経路の半径方向に向きを定められる。エーロフォイル羽根30が、プラットフォーム領域32と先端領域34の間で半径方向で凸形の圧力面38と、プラットフォーム領域32と先端領域34の間で半径方向で凹形の吸込面40とを有する。前縁35と直線状の後縁36の間の軸方向距離であるエーロフォイル羽根30の軸方向幅Wが、プラットフォーム領域32および先端領域34での最大軸方向幅Wmaxと、プラットフォーム領域32と先端領域34の間の位置での最小軸方向幅Wminとの間で放物線状に変化する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軸流ターボ機械用のエーロフォイル羽根、およびエーロフォイル羽根を組み込む軸流ターボ機械に関する。本発明の実施形態は、特に蒸気タービンまたはガスタービン用のタービン羽根に関する。本発明の実施形態は、主に固定羽根に関係するが、排他的にそれらに限定されるわけではない。
【背景技術】
【0002】
タービンの効率は、特に、わずかな効率向上が、電力を発生するのに必要とされる燃料の量の大幅な減少につながることがある大型の設備において、非常に重要である。これにより、非常に大きなコスト削減が実現され、CO2の排出量がかなり減少し、またそれに対応してSOxおよびNOxが減少する。したがって、羽根設計がタービン効率に対して大きな影響を持つので、かなりの費用と労力がその研究に引き続き費やされている。
【0003】
長年の間、従来のタービン羽根は、内側端部ブロックと外側端部ブロックの間で固定羽根が半径方向に延び、羽根がプリズム形状であるようなエーロフォイル断面型のものであった。また、このプリズム型羽根設計に関して、それぞれの羽根軸の周りでの固定羽根および可動羽根の向きが標準化されており、この向きは、タービン軸方向と、エーロフォイル羽根の圧力面上での羽根の前縁円および後縁円に対する接線との間の羽根食違い角によって定義される。
【0004】
タービンにおけるプリズム型羽根の既知の性能改善は、羽根に「傾斜」を与えることによって、すなわち、円周面内、すなわちタービン軸に対して横方向または垂直である平面内で羽根をその根元の周りで傾けることによって実現されている。この「傾斜」は、(羽根の根元での)プラットフォーム領域から先端領域への羽根の出口での質量流量の変化を生み出す。
【0005】
羽根の円周方向間隔(すなわちピッチ)が、プラットフォーム領域から先端領域へ次第に増加するので、スロート線が吸込面に交差する位置は、半径の増加と共に上流に移動する。吸込面の凸形湾曲により、これは、(接線方向に対する)根元での約13°から先端での約15°への出口角の増加をもたらす。
【0006】
これらの既知のエーロフォイル羽根設計よりも性能を改善する「制御流(controlled flow)」型エーロフォイル羽根が、特許文献1で提案されている。本発明は、既知のエーロフォイル羽根設計よりもやはり性能を改善する、修正型の設計を有する制御流型エーロフォイル羽根を提供することを狙いとする。
【0007】
定義
本明細書を通じて、以下の定義を使用する。
【0008】
エーロフォイル羽根の半径方向で最も内側の端部を、エーロフォイル羽根の「プラットフォーム領域」と呼び(しばしばハブ領域または根元とも呼ぶ)、エーロフォイル羽根の半径方向で最も外側の端部を、エーロフォイル羽根の「先端領域」と呼ぶ。
【0009】
「プリズム型」エーロフォイル羽根は、タービン軸からの半径方向線にそれぞれ直交するとみなした羽根の概念上のエーロフォイル区域が、プラットフォーム領域から先端領域まで同じ形状を有し、ひねられず(すなわちプラットフォーム領域から先端領域まで同じ取付角を有し)、エーロフォイル区域の前縁および後縁が全長にわたって半径方向で直線を成すように上下に「積み重ね」られるように設計される。
【0010】
エーロフォイル羽根の羽根出口角(α)は、回転子の円周方向に対して、作動流体が円周方向羽根列から出る角度であり、以下の関係から導出される。
α=sin−1K
ここで、
K=スロート寸法(t)/ピッチ寸法(p)
【0011】
スロート寸法(t)は、1つのエーロフォイル羽根後縁から延ばした、同じ列の隣接するエーロフォイル羽根の吸込面に垂直な最短の線と定義され、ピッチ寸法(p)は、エーロフォイル羽根のプラットフォーム領域から指定の半径方向距離における、1つのエーロフォイル羽根後縁から同じ列の隣接するエーロフォイル羽根後縁への円周方向距離である。
【0012】
取付角(β)は、エーロフォイル羽根の高さまたはスパンに沿った位置での任意の特定のエーロフォイル区域自体の平面が所定のゼロデータムから変位されている角度である。データムは、例えば、エーロフォイル区域が、そのようなエーロフォイル羽根を利用する既知のタービンにおける既知のプリズム型エーロフォイル羽根と同じ「食違い角」(Ψ)を有する位置とみなすことができる。食違い角(Ψ)は、タービンの軸と、エーロフォイル区域の前縁円および後縁円に接する接線との間の角度であり、タービン軸に対するエーロフォイル区域の向きを示す。
【0013】
「翼弦線」は、エーロフォイル区域の前縁半径および後縁半径に接する最短線である。「翼弦長」は、翼弦線に垂直であり、翼弦線が前縁と後縁に接する点をそれぞれ通過する2つの線間の距離である。
【0014】
エーロフォイル羽根の「軸方向幅」(W)は、その前縁と後縁の間の軸方向距離である(すなわち、タービンの回転軸に沿って測定される、その前縁と後縁の間の距離)。
【0015】
裏面偏向(BSD)は、吸込面上でのスロート点と後縁合流点の間の、覆われていないエーロフォイル羽根表面上での角度の変化である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】欧州特許第B1−0704602号明細書
【発明の概要】
【課題を解決するための手段】
【0017】
本発明の第1の態様によれば、作動流体用の環状経路を有する軸流ターボ機械内に配置される同様の羽根のリングの1つとして使用するためのエーロフォイル羽根であって、半径方向内側のプラットフォーム領域と、半径方向外側の先端領域と、軸方向前側の前縁と、軸方向後側の後縁とを有し、後縁が、プラットフォーム領域と先端領域の間で直線状であり、環状経路の半径方向に向きを定められ、
エーロフォイル羽根が、半径方向内側のプラットフォーム領域と半径方向外側の先端領域の間で半径方向で凹形の圧力面と、半径方向内側のプラットフォーム領域と半径方向外側の先端領域の間で半径方向で凸形の吸込面とを有し、
前縁と直線状の後縁の間の軸方向距離であるエーロフォイル羽根の軸方向幅(W)が、プラットフォーム領域および先端領域での最大軸方向幅(Wmax)と、プラットフォーム領域と先端領域の間の位置での最小軸方向幅(Wmin)との間で放物線状に変化する
エーロフォイル羽根が提供される。
【0018】
プラットフォーム領域と先端領域の間のエーロフォイル羽根の軸方向幅(W)の放物線状変化が、羽根形状損失(blade profile losses)を減少させる。特に、プラットフォーム領域および先端領域でのエーロフォイル羽根の減少されたスロート寸法により、プラットフォーム領域と先端領域の間の位置では増加されたスロート寸法を採用できるようになる。これは、プラットフォーム領域と先端領域の間の位置で、より大きな裏面偏向(BSD)を採用できるようにし、したがって羽根形状損失を減少させる。
【0019】
プラットフォーム領域および先端領域での裏面偏向は、15°〜25°の範囲内でよい。プラットフォーム領域での裏面偏向は、先端領域での裏面偏向と実質的に同じでよい。プラットフォーム領域と先端領域の両方での裏面偏向は約19°でよい。プラットフォーム領域と先端領域の間の位置、例えば中央高さ位置での裏面偏向は、25°〜35°の範囲内で変化することがあり、典型的には約30°である。
【0020】
プラットフォーム領域と先端領域の間のエーロフォイル羽根の軸方向幅(W)の放物線状変化も、羽根二次流れ損失を減少させる。特に、プラットフォーム領域および先端領域でのエーロフォイル羽根の増加された軸方向幅(W)と、プラットフォーム領域と先端領域の間の位置でのエーロフォイル羽根の減少された軸方向幅とにより、羽根二次流れ損失が減少される。
【0021】
圧力面および/または吸込面は、半径方向で実質的に対称的に湾曲させることができる。
【0022】
典型的には、プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)は、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)と実質的に同じである。
【0023】
プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)と、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)は、対応する領域で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の最大1.2倍でよい。いくつかの実施形態では、プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)と、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)は、対応する領域で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の約1.076倍でよい。
【0024】
プラットフォーム領域と先端領域の間の位置、典型的にはプラットフォーム領域と先端領域の間の中央高さ位置でのエーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の対応する位置で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の最大0.9倍でよい。いくつかの実施形態では、プラットフォーム領域と先端領域の間の位置、典型的にはプラットフォーム領域と先端領域の間の中央高さ位置でのエーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の対応する位置で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の約0.893倍でよい。
【0025】
エーロフォイル羽根は、典型的には、プラットフォーム領域と先端領域の間で変動エーロフォイル区域を有する。エーロフォイル羽根の軸方向幅(W)の放物線状変化を与えるのは、例えばエーロフォイル区域の取付角(β)の変化ではなく、エーロフォイル区域のこの変化である。したがって、通常は、プラットフォーム領域と先端領域の間のエーロフォイル区域が同じ取付角(β)を有する。
【0026】
エーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の中央高さ位置で得ることができる。典型的には、エーロフォイル羽根の軸方向幅の放物線状変化は、プラットフォーム領域と先端領域の間の中央高さ位置を中心として対称的である。
【0027】
本明細書で定義するピッチ寸法に対するスロート寸法の比に等しいK値が、それぞれプラットフォーム領域および先端領域での最小値(Kmin platformおよびKmin tip)と、プラットフォーム領域と先端領域の間の位置での最大値(Kmax)との間で変化する。したがって、羽根出口角(α)は、それぞれプラットフォーム領域および先端領域での最小値(αmin)と、プラットフォーム領域と先端領域の間の位置での最大値(αmax)の間で変化することがある。
【0028】
いくつかの実施形態では、プラットフォーム領域での最小K値(Kmin platform)が、先端領域での最小K値(Kmin tip)に実質的に等しい。したがって、プラットフォーム領域での羽根出口角(αplatform)は、先端領域での羽根出口角(αtip)に実質的に等しい。
【0029】
典型的には、最大K値(Kmax)は、プラットフォーム領域と先端領域の間の中央高さ位置で得られる。したがって、最大羽根出口角(αmax)が、この中央高さ位置で得られる。したがって、有利には、プラットフォーム領域と先端領域の間の中央高さ領域で羽根形状損失が減少される。
【0030】
K値、したがって羽根出口角(α)の変化は、放物線状であり、プラットフォーム領域と先端領域の間の中央高さ位置を中心として実質的に対称的であってもよい。
【0031】
いくつかの実施形態では、Kmin platformは約0.1616であってもよく、これは、約9.3°(すなわち約9°)のプラットフォーム領域での羽根出口角(αplatform)を与え、Kmin tipは約0.1633であってもよく、これは、約9.4°(すなわち約9°)の先端領域での羽根出口角(αtip)を与え、プラットフォーム領域と先端領域の間の中央高さ位置でのKmaxは約0.2823であってもよく、これは、約16.4°(すなわち約16°)の中央高さ位置での羽根出口角(αmax)を与える。
【0032】
エーロフォイル羽根の平均スロート寸法(tmean)は、通常は、それと等価なプリズム型設計のエーロフォイル羽根の平均スロート寸法に実質的に等しい。これは、平均反動度が、それと等価なプリズム型設計のエーロフォイル羽根の平均反動度に実質的に等しいことを保証する。
【0033】
典型的には、エーロフォイル羽根はタービン段階の固定羽根であり、前記タービン段階は前記固定羽根のリングを備える。
【0034】
本発明の第2の態様によれば、本発明の第1の態様によるエーロフォイル羽根のリングを組み込む軸流ターボ機械が提供される。
【0035】
この軸流ターボ機械は、蒸気タービンやガスタービンなどのタービンであってもよい。このタービンは、本発明の第1の態様による固定タービン羽根を有する少なくとも1つのタービン段階を含んでもよい。
【図面の簡単な説明】
【0036】
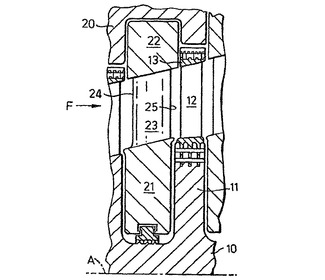
【図1】固定羽根のアセンブリを含む従来の「ディスク−ダイヤフラム」の高圧/中圧蒸気タービン段階を示す蒸気タービンの軸上での概略断面図である。
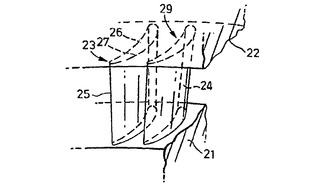
【図2】固定羽根ダイヤフラムでの2つのそのような従来の羽根の斜視図である。
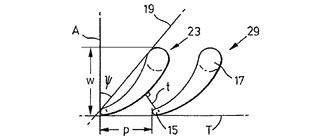
【図3a】半径方向での図2の羽根の概略図である。
【図3b】固定羽根からの出口角(α)を示す図である。
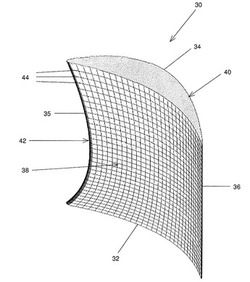
【図4】本発明によるエーロフォイル羽根の斜視図である。
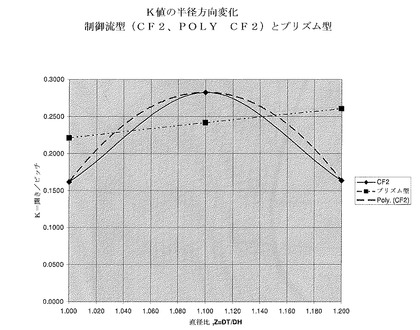
【図5】従来のプリズム型エーロフォイル羽根、および本発明による制御流型エーロフォイル羽根に関する、プラットフォーム領域から先端領域へのエーロフォイル区域の高さに対するK値の変化を示すグラフである。
【発明を実施するための形態】
【0037】
次に、本発明の実施形態を、単に例示として添付図面を参照して説明する。
【0038】
図1に、従来の「ディスク−ダイヤフラム」高圧/中圧蒸気タービン段階の概略軸方向断面図を示す。作動流体である蒸気の流れの方向Fは、タービン回転子軸Aにほぼ平行である。回転子10は、各段階にディスク11を有し、円周方向で位置合わせされて離隔された1組または1列の可動羽根12がディスク11に固定され、羽根12は、それらの半径方向外端部に取り付けられたシュラウド13を有する。タービンの前側から後側に方向Fで流れる蒸気のエネルギーが、回転子10において機械的エネルギーに変換される。
【0039】
各タービン段階に、固定羽根アセンブリが1組の可動羽根12の前にあり、タービン内部ケーシング20に固定されている。この固定羽根アセンブリは、半径方向内側リング21と、半径方向外側リング22と、円周方向で位置合わせされて離隔された1列の固定羽根23とを備え、各羽根23は、半径方向内端部で、すなわちそのプラットフォーム領域で内側リング21に固定され、半径方向外端部で、すなわちその先端領域で外側リング22に固定され、また各羽根が、流れに面する上流の前縁24と、軸方向で下流の後縁25とを有する。
【0040】
固定羽根23と内側および外側リング21、22とのアセンブリは、ダイヤフラムとして知られている。図1に示されるディスク−ダイヤフラム段階は、タービン軸Aに直交する内側リング21と外側リング22の間の領域が、固定羽根前縁24よりも羽根後縁25で大きいタイプのものである。さらに、図1に示される例において、固定羽根23が固定されるリング(または端部ブロック)21、22の表面、すなわち端壁は、円錐台形状を有し、羽根23の前縁24から後縁25への方向Fでタービン軸Aから逸れていく。
【0041】
次に図2を参照すると、図1に示されるタイプのものである固定羽根アセンブリの一部の背面図が示されている。図2に示される固定羽根23は従来のプリズム型であり、つまりそれぞれ直線状であり、すなわち、タービン軸Aからの半径方向線にそれぞれ直交するとみなした羽根の概念上のエーロフォイル区域は、羽根プラットフォーム領域から羽根先端領域まで同じ形状を有し、プラットフォーム領域から先端領域までねじられず、前縁24と後縁25がそれぞれ直線状になるように積み重ねられるように設計される。各羽根23は、凹形圧力面26と凸形吸込面27とを有する。
【0042】
図3(a)を参照すると、この図は、半径方向平面図で、タービン軸Aおよび横方向平面T(すなわち接線平面または円周方向平面)に対する固定羽根23および29の向きを示し、横方向平面Tは固定羽根リングを含み、横方向平面Tに対してタービン軸Aが垂直である。羽根エーロフォイル区域は、小さな後縁円15と、より大きな前縁円17とを基点とする。これら2つの円に対する接線19は、タービン軸A方向から角度Ψにあり、これはすなわち本明細書で以下に定義する食違い角である。所与の半径方向位置でのこれら従来の固定羽根23、29の軸方向幅(W)は、所与の半径方向位置での前縁24と後縁25の間の距離であることが分かる。
【0043】
羽根23の吸込面27から、隣接する羽根29の圧力面26に当たるように垂直線を引いた場合に、最短のそのような線が得られたとき、これがスロート寸法(t)であり、羽根29の後縁25の領域内で得られる。このスロート寸法(t)と固定羽根のピッチ寸法(p)の比が値Kを与え、これは、本明細書で以下に定義するように出口角(α)の正弦に等しい。近似的に、この角度は、横方向平面Tに対する各羽根からの出口角であることが見て取れる。
【0044】
図4は、エーロフォイル羽根30を示し、この羽根30は、本発明の原理に従って形状を定められ、上述した固定羽根アセンブリに組み込むことができる。エーロフォイル羽根30は、従来のプリズム型羽根と同様に、プラットフォーム領域32と先端領域34の間に直線状の後縁36を有する。エーロフォイル羽根30は、圧力面38と吸込面40を有し、これらの面は、プラットフォーム領域32と先端領域34の間で、半径方向でそれぞれ凸形および凹形に対称的に湾曲される。
【0045】
エーロフォイル羽根30の軸方向幅(W)は、羽根30の高さまたは全長に沿って変化し、より特定的には、プラットフォーム領域32および先端領域34での最大軸方向幅(Wmax)と、プラットフォーム領域32と先端領域34の間の位置での最小軸方向幅(Wmin)との間で放物線状に対称的に変化する。したがって、エーロフォイル羽根30の前縁35は、後縁36とは異なり直線状ではなく、軸方向で湾曲されていることを理解されよう。図示した実施形態では、前縁35の湾曲は、プラットフォーム領域32と先端領域34の間の中央高さ位置42を中心として対称であり、それにより、プラットフォーム領域32での最大軸方向幅(Wmax platform)は、先端領域34での最大軸方向幅(Wmax tip)と実質的に等しく、最小軸方向幅(Wmin)は、プラットフォーム領域32と先端領域34の間の中央高さ位置42で得られる。
【0046】
羽根の軸方向幅(W)の放物線状変化は、プラットフォーム領域32と先端領域34の間で、エーロフォイル区域がそれぞれ同じ取付角(β)を有した状態でエーロフォイル羽根区域44を変えることによって実現される。
【0047】
図4に示されるエーロフォイル羽根30の一実施形態の重要なパラメータを、以下の表1に示す。
【0048】
【表1】

【0049】
図5は、表1に示されるパラメータを有する本発明による2つの異なるエーロフォイル羽根30と、それと等価な、プラットフォーム領域と先端領域の間で約68.2mmの一定の軸方向幅(W)を有する従来のプリズム型エーロフォイル羽根とに関する、K値(羽根出口角(α)の正弦に等しい)と、羽根区域の半径方向高さとの関係を示す。
【0050】
従来のプリズム型エーロフォイル羽根では、K値は、プラットフォーム領域での最小値と先端領域での最大値の間で実質的に線形に増加することが分かる。これは、プラットフォーム領域での約13°と先端領域での約15°の間での羽根出口角(α)の実質的な線形増加と等価である。羽根出口角(α)のこの増加は、半径の増加に伴う羽根ピッチ(p)の増加に単純に対応する。
【0051】
本発明による制御流型エーロフォイル羽根30では、K値は、プラットフォーム領域と先端領域での等しいK値(Kmin platform=Kmin tip)と、中央高さ位置での最大K値(Kmax)の間で、羽根の中央高さ位置42を中心として放物線状に対称的に変化することが分かる。最小K値は、プラットフォーム領域および先端領域での約9°の羽根出口角(それぞれαplatformおよびαtip)と等しく、最大K値は、中央高さ位置での約16°の最大羽根出口角(αmax)と等しい。プラットフォーム領域および先端領域でのK値、したがって出口角αを減少させることにより、プラットフォーム領域と先端領域の間の中央高さ位置でK値、したがって出口角αを高めることができるようになる。したがって、中央高さ領域で、羽根形状損失が減少される。
【0052】
本発明のいくつかの実施形態を上の各段落で説明してきたが、添付の特許請求の範囲の範囲から逸脱することなくそれらの実施形態に様々な修正を加えてもよいことを理解すべきである。
【0053】
本発明を、低反動度ディスク−ダイヤフラムタイプの蒸気タービンでの「短尺(short height)」HP/IP固定羽根の使用に関して説明してきたが、他のタイプの軸流タービンおよび圧縮機、ならびに可動エーロフォイル羽根および固定エーロフォイル羽根にも適用可能である。
【符号の説明】
【0054】
10 回転子
11 ディスク
12 可動羽根
13 シュラウド
15 後縁円
17 前縁円
19 接線
20 タービン内側ケーシング
21 半径方向内側リング
22 半径方向外側リング
23 固定羽根
24 前縁
25 後縁
26 圧力面
27 吸込面
29 固定羽根
30 エーロフォイル羽根
32 プラットフォーム領域
34 先端領域
35 前縁
36 後縁
38 圧力面
40 吸込面
42 中央高さ位置
44 変動エーロフォイル区域
Kmax 最大K値
Kmin platform プラットフォーム領域での最小K値
Kmin tip 先端領域での最小K値
t スロート寸法
tmean 平均スロート寸法
W 軸方向幅
Wmax 最大軸方向幅
Wmax platform プラットフォーム領域での最大軸方向幅
Wmax tip 先端領域での最大軸方向幅
Wmin 最小軸方向幅
α 出口角
αmax 最大羽根出口角
αplatform プラットフォーム領域での羽根出口角
αtip 先端領域での羽根出口角
β 取付角
【技術分野】
【0001】
本発明は、軸流ターボ機械用のエーロフォイル羽根、およびエーロフォイル羽根を組み込む軸流ターボ機械に関する。本発明の実施形態は、特に蒸気タービンまたはガスタービン用のタービン羽根に関する。本発明の実施形態は、主に固定羽根に関係するが、排他的にそれらに限定されるわけではない。
【背景技術】
【0002】
タービンの効率は、特に、わずかな効率向上が、電力を発生するのに必要とされる燃料の量の大幅な減少につながることがある大型の設備において、非常に重要である。これにより、非常に大きなコスト削減が実現され、CO2の排出量がかなり減少し、またそれに対応してSOxおよびNOxが減少する。したがって、羽根設計がタービン効率に対して大きな影響を持つので、かなりの費用と労力がその研究に引き続き費やされている。
【0003】
長年の間、従来のタービン羽根は、内側端部ブロックと外側端部ブロックの間で固定羽根が半径方向に延び、羽根がプリズム形状であるようなエーロフォイル断面型のものであった。また、このプリズム型羽根設計に関して、それぞれの羽根軸の周りでの固定羽根および可動羽根の向きが標準化されており、この向きは、タービン軸方向と、エーロフォイル羽根の圧力面上での羽根の前縁円および後縁円に対する接線との間の羽根食違い角によって定義される。
【0004】
タービンにおけるプリズム型羽根の既知の性能改善は、羽根に「傾斜」を与えることによって、すなわち、円周面内、すなわちタービン軸に対して横方向または垂直である平面内で羽根をその根元の周りで傾けることによって実現されている。この「傾斜」は、(羽根の根元での)プラットフォーム領域から先端領域への羽根の出口での質量流量の変化を生み出す。
【0005】
羽根の円周方向間隔(すなわちピッチ)が、プラットフォーム領域から先端領域へ次第に増加するので、スロート線が吸込面に交差する位置は、半径の増加と共に上流に移動する。吸込面の凸形湾曲により、これは、(接線方向に対する)根元での約13°から先端での約15°への出口角の増加をもたらす。
【0006】
これらの既知のエーロフォイル羽根設計よりも性能を改善する「制御流(controlled flow)」型エーロフォイル羽根が、特許文献1で提案されている。本発明は、既知のエーロフォイル羽根設計よりもやはり性能を改善する、修正型の設計を有する制御流型エーロフォイル羽根を提供することを狙いとする。
【0007】
定義
本明細書を通じて、以下の定義を使用する。
【0008】
エーロフォイル羽根の半径方向で最も内側の端部を、エーロフォイル羽根の「プラットフォーム領域」と呼び(しばしばハブ領域または根元とも呼ぶ)、エーロフォイル羽根の半径方向で最も外側の端部を、エーロフォイル羽根の「先端領域」と呼ぶ。
【0009】
「プリズム型」エーロフォイル羽根は、タービン軸からの半径方向線にそれぞれ直交するとみなした羽根の概念上のエーロフォイル区域が、プラットフォーム領域から先端領域まで同じ形状を有し、ひねられず(すなわちプラットフォーム領域から先端領域まで同じ取付角を有し)、エーロフォイル区域の前縁および後縁が全長にわたって半径方向で直線を成すように上下に「積み重ね」られるように設計される。
【0010】
エーロフォイル羽根の羽根出口角(α)は、回転子の円周方向に対して、作動流体が円周方向羽根列から出る角度であり、以下の関係から導出される。
α=sin−1K
ここで、
K=スロート寸法(t)/ピッチ寸法(p)
【0011】
スロート寸法(t)は、1つのエーロフォイル羽根後縁から延ばした、同じ列の隣接するエーロフォイル羽根の吸込面に垂直な最短の線と定義され、ピッチ寸法(p)は、エーロフォイル羽根のプラットフォーム領域から指定の半径方向距離における、1つのエーロフォイル羽根後縁から同じ列の隣接するエーロフォイル羽根後縁への円周方向距離である。
【0012】
取付角(β)は、エーロフォイル羽根の高さまたはスパンに沿った位置での任意の特定のエーロフォイル区域自体の平面が所定のゼロデータムから変位されている角度である。データムは、例えば、エーロフォイル区域が、そのようなエーロフォイル羽根を利用する既知のタービンにおける既知のプリズム型エーロフォイル羽根と同じ「食違い角」(Ψ)を有する位置とみなすことができる。食違い角(Ψ)は、タービンの軸と、エーロフォイル区域の前縁円および後縁円に接する接線との間の角度であり、タービン軸に対するエーロフォイル区域の向きを示す。
【0013】
「翼弦線」は、エーロフォイル区域の前縁半径および後縁半径に接する最短線である。「翼弦長」は、翼弦線に垂直であり、翼弦線が前縁と後縁に接する点をそれぞれ通過する2つの線間の距離である。
【0014】
エーロフォイル羽根の「軸方向幅」(W)は、その前縁と後縁の間の軸方向距離である(すなわち、タービンの回転軸に沿って測定される、その前縁と後縁の間の距離)。
【0015】
裏面偏向(BSD)は、吸込面上でのスロート点と後縁合流点の間の、覆われていないエーロフォイル羽根表面上での角度の変化である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】欧州特許第B1−0704602号明細書
【発明の概要】
【課題を解決するための手段】
【0017】
本発明の第1の態様によれば、作動流体用の環状経路を有する軸流ターボ機械内に配置される同様の羽根のリングの1つとして使用するためのエーロフォイル羽根であって、半径方向内側のプラットフォーム領域と、半径方向外側の先端領域と、軸方向前側の前縁と、軸方向後側の後縁とを有し、後縁が、プラットフォーム領域と先端領域の間で直線状であり、環状経路の半径方向に向きを定められ、
エーロフォイル羽根が、半径方向内側のプラットフォーム領域と半径方向外側の先端領域の間で半径方向で凹形の圧力面と、半径方向内側のプラットフォーム領域と半径方向外側の先端領域の間で半径方向で凸形の吸込面とを有し、
前縁と直線状の後縁の間の軸方向距離であるエーロフォイル羽根の軸方向幅(W)が、プラットフォーム領域および先端領域での最大軸方向幅(Wmax)と、プラットフォーム領域と先端領域の間の位置での最小軸方向幅(Wmin)との間で放物線状に変化する
エーロフォイル羽根が提供される。
【0018】
プラットフォーム領域と先端領域の間のエーロフォイル羽根の軸方向幅(W)の放物線状変化が、羽根形状損失(blade profile losses)を減少させる。特に、プラットフォーム領域および先端領域でのエーロフォイル羽根の減少されたスロート寸法により、プラットフォーム領域と先端領域の間の位置では増加されたスロート寸法を採用できるようになる。これは、プラットフォーム領域と先端領域の間の位置で、より大きな裏面偏向(BSD)を採用できるようにし、したがって羽根形状損失を減少させる。
【0019】
プラットフォーム領域および先端領域での裏面偏向は、15°〜25°の範囲内でよい。プラットフォーム領域での裏面偏向は、先端領域での裏面偏向と実質的に同じでよい。プラットフォーム領域と先端領域の両方での裏面偏向は約19°でよい。プラットフォーム領域と先端領域の間の位置、例えば中央高さ位置での裏面偏向は、25°〜35°の範囲内で変化することがあり、典型的には約30°である。
【0020】
プラットフォーム領域と先端領域の間のエーロフォイル羽根の軸方向幅(W)の放物線状変化も、羽根二次流れ損失を減少させる。特に、プラットフォーム領域および先端領域でのエーロフォイル羽根の増加された軸方向幅(W)と、プラットフォーム領域と先端領域の間の位置でのエーロフォイル羽根の減少された軸方向幅とにより、羽根二次流れ損失が減少される。
【0021】
圧力面および/または吸込面は、半径方向で実質的に対称的に湾曲させることができる。
【0022】
典型的には、プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)は、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)と実質的に同じである。
【0023】
プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)と、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)は、対応する領域で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の最大1.2倍でよい。いくつかの実施形態では、プラットフォーム領域でのエーロフォイル羽根の最大軸方向幅(Wmax platform)と、先端領域でのエーロフォイル羽根の最大軸方向幅(Wmax tip)は、対応する領域で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の約1.076倍でよい。
【0024】
プラットフォーム領域と先端領域の間の位置、典型的にはプラットフォーム領域と先端領域の間の中央高さ位置でのエーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の対応する位置で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の最大0.9倍でよい。いくつかの実施形態では、プラットフォーム領域と先端領域の間の位置、典型的にはプラットフォーム領域と先端領域の間の中央高さ位置でのエーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の対応する位置で、それと等価なプリズム型設計のエーロフォイル羽根の軸方向幅(W)の約0.893倍でよい。
【0025】
エーロフォイル羽根は、典型的には、プラットフォーム領域と先端領域の間で変動エーロフォイル区域を有する。エーロフォイル羽根の軸方向幅(W)の放物線状変化を与えるのは、例えばエーロフォイル区域の取付角(β)の変化ではなく、エーロフォイル区域のこの変化である。したがって、通常は、プラットフォーム領域と先端領域の間のエーロフォイル区域が同じ取付角(β)を有する。
【0026】
エーロフォイル羽根の最小軸方向幅(Wmin)は、プラットフォーム領域と先端領域の間の中央高さ位置で得ることができる。典型的には、エーロフォイル羽根の軸方向幅の放物線状変化は、プラットフォーム領域と先端領域の間の中央高さ位置を中心として対称的である。
【0027】
本明細書で定義するピッチ寸法に対するスロート寸法の比に等しいK値が、それぞれプラットフォーム領域および先端領域での最小値(Kmin platformおよびKmin tip)と、プラットフォーム領域と先端領域の間の位置での最大値(Kmax)との間で変化する。したがって、羽根出口角(α)は、それぞれプラットフォーム領域および先端領域での最小値(αmin)と、プラットフォーム領域と先端領域の間の位置での最大値(αmax)の間で変化することがある。
【0028】
いくつかの実施形態では、プラットフォーム領域での最小K値(Kmin platform)が、先端領域での最小K値(Kmin tip)に実質的に等しい。したがって、プラットフォーム領域での羽根出口角(αplatform)は、先端領域での羽根出口角(αtip)に実質的に等しい。
【0029】
典型的には、最大K値(Kmax)は、プラットフォーム領域と先端領域の間の中央高さ位置で得られる。したがって、最大羽根出口角(αmax)が、この中央高さ位置で得られる。したがって、有利には、プラットフォーム領域と先端領域の間の中央高さ領域で羽根形状損失が減少される。
【0030】
K値、したがって羽根出口角(α)の変化は、放物線状であり、プラットフォーム領域と先端領域の間の中央高さ位置を中心として実質的に対称的であってもよい。
【0031】
いくつかの実施形態では、Kmin platformは約0.1616であってもよく、これは、約9.3°(すなわち約9°)のプラットフォーム領域での羽根出口角(αplatform)を与え、Kmin tipは約0.1633であってもよく、これは、約9.4°(すなわち約9°)の先端領域での羽根出口角(αtip)を与え、プラットフォーム領域と先端領域の間の中央高さ位置でのKmaxは約0.2823であってもよく、これは、約16.4°(すなわち約16°)の中央高さ位置での羽根出口角(αmax)を与える。
【0032】
エーロフォイル羽根の平均スロート寸法(tmean)は、通常は、それと等価なプリズム型設計のエーロフォイル羽根の平均スロート寸法に実質的に等しい。これは、平均反動度が、それと等価なプリズム型設計のエーロフォイル羽根の平均反動度に実質的に等しいことを保証する。
【0033】
典型的には、エーロフォイル羽根はタービン段階の固定羽根であり、前記タービン段階は前記固定羽根のリングを備える。
【0034】
本発明の第2の態様によれば、本発明の第1の態様によるエーロフォイル羽根のリングを組み込む軸流ターボ機械が提供される。
【0035】
この軸流ターボ機械は、蒸気タービンやガスタービンなどのタービンであってもよい。このタービンは、本発明の第1の態様による固定タービン羽根を有する少なくとも1つのタービン段階を含んでもよい。
【図面の簡単な説明】
【0036】
【図1】固定羽根のアセンブリを含む従来の「ディスク−ダイヤフラム」の高圧/中圧蒸気タービン段階を示す蒸気タービンの軸上での概略断面図である。
【図2】固定羽根ダイヤフラムでの2つのそのような従来の羽根の斜視図である。
【図3a】半径方向での図2の羽根の概略図である。
【図3b】固定羽根からの出口角(α)を示す図である。
【図4】本発明によるエーロフォイル羽根の斜視図である。
【図5】従来のプリズム型エーロフォイル羽根、および本発明による制御流型エーロフォイル羽根に関する、プラットフォーム領域から先端領域へのエーロフォイル区域の高さに対するK値の変化を示すグラフである。
【発明を実施するための形態】
【0037】
次に、本発明の実施形態を、単に例示として添付図面を参照して説明する。
【0038】
図1に、従来の「ディスク−ダイヤフラム」高圧/中圧蒸気タービン段階の概略軸方向断面図を示す。作動流体である蒸気の流れの方向Fは、タービン回転子軸Aにほぼ平行である。回転子10は、各段階にディスク11を有し、円周方向で位置合わせされて離隔された1組または1列の可動羽根12がディスク11に固定され、羽根12は、それらの半径方向外端部に取り付けられたシュラウド13を有する。タービンの前側から後側に方向Fで流れる蒸気のエネルギーが、回転子10において機械的エネルギーに変換される。
【0039】
各タービン段階に、固定羽根アセンブリが1組の可動羽根12の前にあり、タービン内部ケーシング20に固定されている。この固定羽根アセンブリは、半径方向内側リング21と、半径方向外側リング22と、円周方向で位置合わせされて離隔された1列の固定羽根23とを備え、各羽根23は、半径方向内端部で、すなわちそのプラットフォーム領域で内側リング21に固定され、半径方向外端部で、すなわちその先端領域で外側リング22に固定され、また各羽根が、流れに面する上流の前縁24と、軸方向で下流の後縁25とを有する。
【0040】
固定羽根23と内側および外側リング21、22とのアセンブリは、ダイヤフラムとして知られている。図1に示されるディスク−ダイヤフラム段階は、タービン軸Aに直交する内側リング21と外側リング22の間の領域が、固定羽根前縁24よりも羽根後縁25で大きいタイプのものである。さらに、図1に示される例において、固定羽根23が固定されるリング(または端部ブロック)21、22の表面、すなわち端壁は、円錐台形状を有し、羽根23の前縁24から後縁25への方向Fでタービン軸Aから逸れていく。
【0041】
次に図2を参照すると、図1に示されるタイプのものである固定羽根アセンブリの一部の背面図が示されている。図2に示される固定羽根23は従来のプリズム型であり、つまりそれぞれ直線状であり、すなわち、タービン軸Aからの半径方向線にそれぞれ直交するとみなした羽根の概念上のエーロフォイル区域は、羽根プラットフォーム領域から羽根先端領域まで同じ形状を有し、プラットフォーム領域から先端領域までねじられず、前縁24と後縁25がそれぞれ直線状になるように積み重ねられるように設計される。各羽根23は、凹形圧力面26と凸形吸込面27とを有する。
【0042】
図3(a)を参照すると、この図は、半径方向平面図で、タービン軸Aおよび横方向平面T(すなわち接線平面または円周方向平面)に対する固定羽根23および29の向きを示し、横方向平面Tは固定羽根リングを含み、横方向平面Tに対してタービン軸Aが垂直である。羽根エーロフォイル区域は、小さな後縁円15と、より大きな前縁円17とを基点とする。これら2つの円に対する接線19は、タービン軸A方向から角度Ψにあり、これはすなわち本明細書で以下に定義する食違い角である。所与の半径方向位置でのこれら従来の固定羽根23、29の軸方向幅(W)は、所与の半径方向位置での前縁24と後縁25の間の距離であることが分かる。
【0043】
羽根23の吸込面27から、隣接する羽根29の圧力面26に当たるように垂直線を引いた場合に、最短のそのような線が得られたとき、これがスロート寸法(t)であり、羽根29の後縁25の領域内で得られる。このスロート寸法(t)と固定羽根のピッチ寸法(p)の比が値Kを与え、これは、本明細書で以下に定義するように出口角(α)の正弦に等しい。近似的に、この角度は、横方向平面Tに対する各羽根からの出口角であることが見て取れる。
【0044】
図4は、エーロフォイル羽根30を示し、この羽根30は、本発明の原理に従って形状を定められ、上述した固定羽根アセンブリに組み込むことができる。エーロフォイル羽根30は、従来のプリズム型羽根と同様に、プラットフォーム領域32と先端領域34の間に直線状の後縁36を有する。エーロフォイル羽根30は、圧力面38と吸込面40を有し、これらの面は、プラットフォーム領域32と先端領域34の間で、半径方向でそれぞれ凸形および凹形に対称的に湾曲される。
【0045】
エーロフォイル羽根30の軸方向幅(W)は、羽根30の高さまたは全長に沿って変化し、より特定的には、プラットフォーム領域32および先端領域34での最大軸方向幅(Wmax)と、プラットフォーム領域32と先端領域34の間の位置での最小軸方向幅(Wmin)との間で放物線状に対称的に変化する。したがって、エーロフォイル羽根30の前縁35は、後縁36とは異なり直線状ではなく、軸方向で湾曲されていることを理解されよう。図示した実施形態では、前縁35の湾曲は、プラットフォーム領域32と先端領域34の間の中央高さ位置42を中心として対称であり、それにより、プラットフォーム領域32での最大軸方向幅(Wmax platform)は、先端領域34での最大軸方向幅(Wmax tip)と実質的に等しく、最小軸方向幅(Wmin)は、プラットフォーム領域32と先端領域34の間の中央高さ位置42で得られる。
【0046】
羽根の軸方向幅(W)の放物線状変化は、プラットフォーム領域32と先端領域34の間で、エーロフォイル区域がそれぞれ同じ取付角(β)を有した状態でエーロフォイル羽根区域44を変えることによって実現される。
【0047】
図4に示されるエーロフォイル羽根30の一実施形態の重要なパラメータを、以下の表1に示す。
【0048】
【表1】
【0049】
図5は、表1に示されるパラメータを有する本発明による2つの異なるエーロフォイル羽根30と、それと等価な、プラットフォーム領域と先端領域の間で約68.2mmの一定の軸方向幅(W)を有する従来のプリズム型エーロフォイル羽根とに関する、K値(羽根出口角(α)の正弦に等しい)と、羽根区域の半径方向高さとの関係を示す。
【0050】
従来のプリズム型エーロフォイル羽根では、K値は、プラットフォーム領域での最小値と先端領域での最大値の間で実質的に線形に増加することが分かる。これは、プラットフォーム領域での約13°と先端領域での約15°の間での羽根出口角(α)の実質的な線形増加と等価である。羽根出口角(α)のこの増加は、半径の増加に伴う羽根ピッチ(p)の増加に単純に対応する。
【0051】
本発明による制御流型エーロフォイル羽根30では、K値は、プラットフォーム領域と先端領域での等しいK値(Kmin platform=Kmin tip)と、中央高さ位置での最大K値(Kmax)の間で、羽根の中央高さ位置42を中心として放物線状に対称的に変化することが分かる。最小K値は、プラットフォーム領域および先端領域での約9°の羽根出口角(それぞれαplatformおよびαtip)と等しく、最大K値は、中央高さ位置での約16°の最大羽根出口角(αmax)と等しい。プラットフォーム領域および先端領域でのK値、したがって出口角αを減少させることにより、プラットフォーム領域と先端領域の間の中央高さ位置でK値、したがって出口角αを高めることができるようになる。したがって、中央高さ領域で、羽根形状損失が減少される。
【0052】
本発明のいくつかの実施形態を上の各段落で説明してきたが、添付の特許請求の範囲の範囲から逸脱することなくそれらの実施形態に様々な修正を加えてもよいことを理解すべきである。
【0053】
本発明を、低反動度ディスク−ダイヤフラムタイプの蒸気タービンでの「短尺(short height)」HP/IP固定羽根の使用に関して説明してきたが、他のタイプの軸流タービンおよび圧縮機、ならびに可動エーロフォイル羽根および固定エーロフォイル羽根にも適用可能である。
【符号の説明】
【0054】
10 回転子
11 ディスク
12 可動羽根
13 シュラウド
15 後縁円
17 前縁円
19 接線
20 タービン内側ケーシング
21 半径方向内側リング
22 半径方向外側リング
23 固定羽根
24 前縁
25 後縁
26 圧力面
27 吸込面
29 固定羽根
30 エーロフォイル羽根
32 プラットフォーム領域
34 先端領域
35 前縁
36 後縁
38 圧力面
40 吸込面
42 中央高さ位置
44 変動エーロフォイル区域
Kmax 最大K値
Kmin platform プラットフォーム領域での最小K値
Kmin tip 先端領域での最小K値
t スロート寸法
tmean 平均スロート寸法
W 軸方向幅
Wmax 最大軸方向幅
Wmax platform プラットフォーム領域での最大軸方向幅
Wmax tip 先端領域での最大軸方向幅
Wmin 最小軸方向幅
α 出口角
αmax 最大羽根出口角
αplatform プラットフォーム領域での羽根出口角
αtip 先端領域での羽根出口角
β 取付角
【特許請求の範囲】
【請求項1】
半径方向内側のプラットフォーム領域(32)と、半径方向外側の先端領域(34)と、軸方向前側の前縁(35)と、軸方向後側の後縁(36)とを有するエーロフォイル羽根(30)であって、前記後縁(36)が、プラットフォーム領域(32)と先端領域(34)の間で直線状であり、環状経路の半径方向に向きを定められ、
前記エーロフォイル羽根(30)が、前記半径方向内側のプラットフォーム領域(32)と前記半径方向外側の先端領域(34)の間で半径方向で凸形の圧力面(38)と、前記半径方向内側のプラットフォーム領域(32)と前記半径方向外側の先端領域(34)の間で半径方向で凹形の吸込面(40)とを有し、
前記前縁(35)と前記直線状の後縁(36)の間の軸方向距離である前記エーロフォイル羽根(30)の軸方向幅(W)が、前記プラットフォーム領域(32)および先端領域(34)での最大軸方向幅(Wmax)と、前記プラットフォーム領域(32)と前記先端領域(34)の間の位置での最小軸方向幅(Wmin)との間で放物線状に変化する
エーロフォイル羽根(30)。
【請求項2】
前記エーロフォイル羽根(30)が、前記エーロフォイル羽根の前記軸方向幅(W)の放物線状変化を与えるために、前記プラットフォーム領域(32)と前記先端領域(34)の間で変動エーロフォイル区域(44)を有する、請求項1に記載のエーロフォイル羽根。
【請求項3】
前記プラットフォーム領域(32)と前記先端領域(34)の間の前記エーロフォイル区域(44)が同じ取付角(β)を有する、請求項1または2に記載のエーロフォイル羽根。
【請求項4】
前記エーロフォイル羽根(30)の前記最小軸方向幅(Wmin)が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)で得られる、請求項1〜3のいずれか一項に記載のエーロフォイル羽根。
【請求項5】
前記エーロフォイル羽根(30)の前記軸方向幅(W)の放物線状変化が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)を中心として対称的である、請求項4に記載のエーロフォイル羽根。
【請求項6】
前記ピッチ寸法(p)に対する前記スロート寸法(t)の比に等しいK値が、それぞれ前記プラットフォーム領域(32)および前記先端領域(34)での最小値(Kmin platformおよびKmin tip)と、前記プラットフォーム領域(32)と前記先端領域(34)の間の位置での最大値(Kmax)との間で変化する、請求項1〜5のいずれか一項に記載のエーロフォイル羽根。
【請求項7】
前記プラットフォーム領域での最小K値(Kmin platform)が、前記先端領域での最小K値(Kmin tip)に実質的に等しい、請求項6に記載のエーロフォイル羽根。
【請求項8】
前記最大K値(Kmax)が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)で得られる、請求項6または7に記載のエーロフォイル羽根。
【請求項9】
前記K値の変化が、放物線状であり、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)を中心として実質的に対称的である、請求項6〜8のいずれか一項に記載のエーロフォイル羽根。
【請求項10】
前記エーロフォイル羽根(30)がタービン段階の固定羽根であり、前記タービン段階が前記固定羽根(30)のリングを備える、請求項1〜9のいずれか一項に記載のエーロフォイル羽根。
【請求項11】
前記エーロフォイル羽根(30)が、作動流体用の環状経路を有する軸流ターボ機械内に配置される同様の羽根のリングの1つとして使用するためのものである、請求項1に記載のエーロフォイル羽根。
【請求項12】
前記プラットフォーム領域と前記先端領域での前記最大軸方向幅(Wmax)が実質的に同じである、請求項1に記載のエーロフォイル羽根。
【請求項13】
前記エーロフォイル羽根が固定羽根である、請求項1に記載のエーロフォイル羽根。
【請求項14】
請求項1〜13のいずれか一項に記載のエーロフォイル羽根(30)のリングを組み込む軸流ターボ機械。
【請求項15】
前記軸流ターボ機械が、請求項1〜13のいずれか一項に記載の固定タービン羽根(30)を有する少なくとも1つのタービン段階を含むタービンである、請求項14に記載の軸流ターボ機械。
【請求項1】
半径方向内側のプラットフォーム領域(32)と、半径方向外側の先端領域(34)と、軸方向前側の前縁(35)と、軸方向後側の後縁(36)とを有するエーロフォイル羽根(30)であって、前記後縁(36)が、プラットフォーム領域(32)と先端領域(34)の間で直線状であり、環状経路の半径方向に向きを定められ、
前記エーロフォイル羽根(30)が、前記半径方向内側のプラットフォーム領域(32)と前記半径方向外側の先端領域(34)の間で半径方向で凸形の圧力面(38)と、前記半径方向内側のプラットフォーム領域(32)と前記半径方向外側の先端領域(34)の間で半径方向で凹形の吸込面(40)とを有し、
前記前縁(35)と前記直線状の後縁(36)の間の軸方向距離である前記エーロフォイル羽根(30)の軸方向幅(W)が、前記プラットフォーム領域(32)および先端領域(34)での最大軸方向幅(Wmax)と、前記プラットフォーム領域(32)と前記先端領域(34)の間の位置での最小軸方向幅(Wmin)との間で放物線状に変化する
エーロフォイル羽根(30)。
【請求項2】
前記エーロフォイル羽根(30)が、前記エーロフォイル羽根の前記軸方向幅(W)の放物線状変化を与えるために、前記プラットフォーム領域(32)と前記先端領域(34)の間で変動エーロフォイル区域(44)を有する、請求項1に記載のエーロフォイル羽根。
【請求項3】
前記プラットフォーム領域(32)と前記先端領域(34)の間の前記エーロフォイル区域(44)が同じ取付角(β)を有する、請求項1または2に記載のエーロフォイル羽根。
【請求項4】
前記エーロフォイル羽根(30)の前記最小軸方向幅(Wmin)が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)で得られる、請求項1〜3のいずれか一項に記載のエーロフォイル羽根。
【請求項5】
前記エーロフォイル羽根(30)の前記軸方向幅(W)の放物線状変化が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)を中心として対称的である、請求項4に記載のエーロフォイル羽根。
【請求項6】
前記ピッチ寸法(p)に対する前記スロート寸法(t)の比に等しいK値が、それぞれ前記プラットフォーム領域(32)および前記先端領域(34)での最小値(Kmin platformおよびKmin tip)と、前記プラットフォーム領域(32)と前記先端領域(34)の間の位置での最大値(Kmax)との間で変化する、請求項1〜5のいずれか一項に記載のエーロフォイル羽根。
【請求項7】
前記プラットフォーム領域での最小K値(Kmin platform)が、前記先端領域での最小K値(Kmin tip)に実質的に等しい、請求項6に記載のエーロフォイル羽根。
【請求項8】
前記最大K値(Kmax)が、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)で得られる、請求項6または7に記載のエーロフォイル羽根。
【請求項9】
前記K値の変化が、放物線状であり、前記プラットフォーム領域(32)と前記先端領域(34)の間の中央高さ位置(42)を中心として実質的に対称的である、請求項6〜8のいずれか一項に記載のエーロフォイル羽根。
【請求項10】
前記エーロフォイル羽根(30)がタービン段階の固定羽根であり、前記タービン段階が前記固定羽根(30)のリングを備える、請求項1〜9のいずれか一項に記載のエーロフォイル羽根。
【請求項11】
前記エーロフォイル羽根(30)が、作動流体用の環状経路を有する軸流ターボ機械内に配置される同様の羽根のリングの1つとして使用するためのものである、請求項1に記載のエーロフォイル羽根。
【請求項12】
前記プラットフォーム領域と前記先端領域での前記最大軸方向幅(Wmax)が実質的に同じである、請求項1に記載のエーロフォイル羽根。
【請求項13】
前記エーロフォイル羽根が固定羽根である、請求項1に記載のエーロフォイル羽根。
【請求項14】
請求項1〜13のいずれか一項に記載のエーロフォイル羽根(30)のリングを組み込む軸流ターボ機械。
【請求項15】
前記軸流ターボ機械が、請求項1〜13のいずれか一項に記載の固定タービン羽根(30)を有する少なくとも1つのタービン段階を含むタービンである、請求項14に記載の軸流ターボ機械。
【図1】

【図2】
【図3a】
【図3b】

【図4】
【図5】
【図2】
【図3a】
【図3b】
【図4】
【図5】
【公開番号】特開2012−145112(P2012−145112A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−3708(P2012−3708)
【出願日】平成24年1月12日(2012.1.12)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2012−3708(P2012−3708)
【出願日】平成24年1月12日(2012.1.12)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]