
軸流型流体機械
【課題】軸流型流体機械の揚程−流量特性曲線において、低流量域で見られる右上がり特性と呼ばれる不安定特性を防止し、更に設計点近傍の安定な運転範囲においては効率が低下することを簡易な構成で防止することである。
【解決手段】羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝内を移動する溝高さ調整部材と、該溝高さ調整部材の移動をガイドする軸と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【解決手段】羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝内を移動する溝高さ調整部材と、該溝高さ調整部材の移動をガイドする軸と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、揚程−流量特性曲線の不安定性を抑制した軸流型流体機械に関する。
【背景技術】
【0002】
従来の軸流型流体機械として、特開2003−013898(特許文献1)がある。同文献の図2に示される軸流型流体機械において、ケーシング(同文献の符号2)の内面に、同文献の図4に示される溝(同文献の符号5)を設けることで、同文献の段落0037で「羽根車1により圧力の上昇した流体が溝5内を溝の下流側終端位置から溝の上流側終端位置に向かって逆流し、低流量時に発生する再循環流(羽根入口逆流)の発生場所に噴出して再循環流の発生を抑制し、再循環流により正流が予旋回を受けるのを抑制することができ、羽根旋回失速の発生を防止できる。」と説明されるように、羽根旋回失速の発生を防止している。
【0003】
しかしながら、単にこの構成を用いたのでは、特許文献1の要約書に記載された課題「軸流型流体機械の揚程−流量特性曲線の右上がり特性を改善し、運転範囲の拡大を図るとともに、安定な運転範囲においては効率低下や振動・騒音の増大を抑制する」ことができない。
【0004】
そこで、特許文献1では、同文献の図1に図示されるように、軸流型流体機械のケーシング(同文献の符号2)内面に、羽根車(同文献の符号1)の入口側とケーシング内面の羽根存在域内を結ぶ圧力勾配方向の溝(同文献の符号5)を周方向に複数本形成し、ケーシング内面に設けた可動部材(同文献の符号6)の移動により、不安定運転域では羽根存在域内に溝が現われ、安定運転域では羽根と溝が干渉しないようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−013898号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、同文献の段落0047で「次に、ケーシングライナ(可動部材)6を移動させる機構について図1により説明する。吸込側のケーシング2、可動部材6及び吐出側のケーシング2にシャフト7が貫通され、吐出側のケーシング2にはモータ8が設けられている。可動部6とシャフト7とはネジ結合されており、モータ8によりシャフト7を回転させ、ネジ部によって可動部材6をL方向やR方向へ移動させる構造となっている。なお、可動機構としては、モータ以外にも油圧シリンダなどを用いることもできる。上記移動機構の制御は、ポンプの内部圧力を計測する圧力センサ、ポンプ吐出量を計測する超音波流量計や電磁流量計などを設け、内部圧力や吐出し量が予め決められた値となったとき、モータやシリンダにより可動部を移動させるようにすれば自動制御を可能にでき」と説明されるように、モータを用いて可動部材を動かすことで、羽根存在領域内に溝を露出させたり隠したりしている。つまり、可動部材を動かすためのモータが必要であり、また、可動部材を動かすか否かを判断するためのセンサや演算回路などが必要だった。
【0007】
本発明は、特許文献1で必須であったモータ、センサ、演算回路などを用いることなく、軸流型流体機械の揚程−流量特性曲線において、低流量域で見られる右上がり特性と呼ばれる不安定特性を防止し、更に設計点近傍の安定な運転範囲においては効率が低下することを防止する軸流型流体機械を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題は、羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝内を移動する溝高さ調整部材と、該溝高さ調整部材の移動をガイドする軸と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動する軸流型流体機械によって解決される。
【0009】
また、羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝に食い違い構造で保持され、該溝内を摺動する溝高さ調整部材と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動する軸流型流体機械によって解決される。
【発明の効果】
【0010】
簡易な構成で、揚程−流量特性曲線の低流量域における不安定特性を設計点近傍での効率の低下を伴うことなく解消でき、低流量域での安定性と、設計点近傍での高効率の両立を図ることができる。
【図面の簡単な説明】
【0011】
【図1】実施例1の軸流ポンプの要部断面図。
【図2】軸流ポンプの揚程と効率の流量特性曲線。
【図3】実施例2の軸流ポンプの要部断面図。
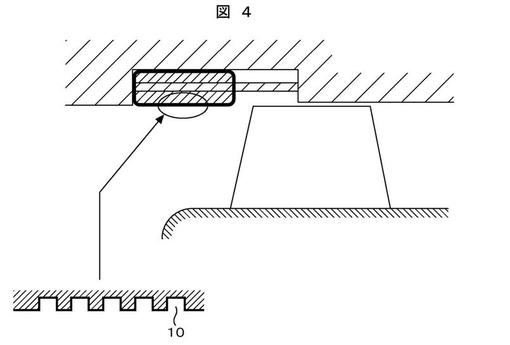
【図4】実施例3の軸流ポンプの要部断面図。
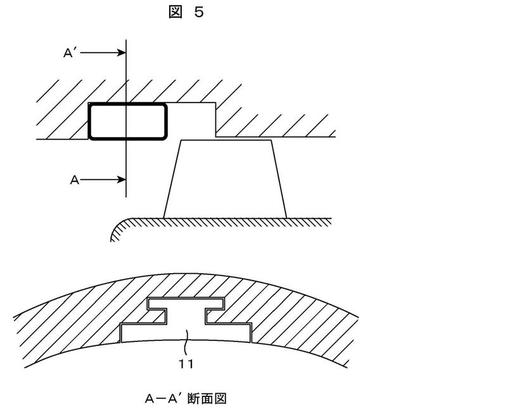
【図5】実施例4の軸流ポンプの要部断面図。
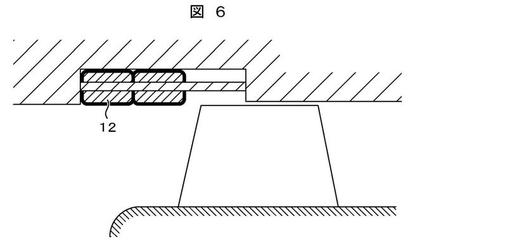
【図6】実施例5の軸流ポンプの要部断面図。
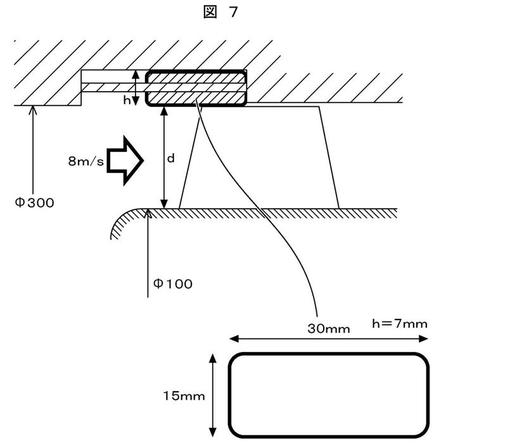
【図7】実施例1の溝高さ調整部材の具体例。
【発明を実施するための形態】
【0012】
以下、図面を用いて、軸流ポンプを例に本発明に係る軸流型流体機械の実施例を説明する。なお、本発明の実施例の軸流型流体機械が前提とする構造は概ね特許文献1の図2、図3、図4と同等であるため、特許文献1と重複する説明を省略することとし、特許文献1の構成と相違する点を中心に本発明の実施例を説明することとする。
【実施例1】
【0013】
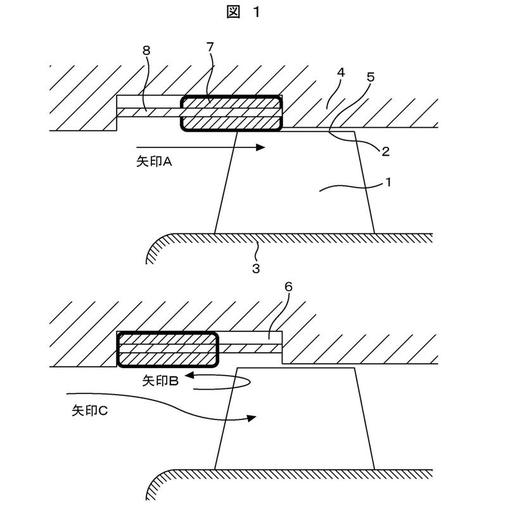
図1を用いて、ケーシングと羽根チップとの間に設けられた溝の溝深さを、流れの状態に応じて受動的に変化させる実施例1の軸流ポンプを説明する。なお、図1上図は設計点流量で軸流ポンプを運転しているときの要部断面図であり、図1下図は低流量で軸流ポンプを運転しているときの要部断面図である。
【0014】
図1において、1は羽根、2は羽根1の最外径部分である羽根チップ、3は羽根1が設置されているボスであり、図示しないモータによってボス3が回転するとボス3に設置された羽根1、羽根チップ2も同一の周波数で回転する。以下では羽根1、羽根チップ2、ボス3を総称して羽根車13と呼ぶ。4は羽根車13を覆う静止壁でありケーシングライナである。5はケーシングライナ4と羽根チップ2との間の隙間でありチップクリアランスである。
【0015】
また、6はケーシングライナ4の内周に羽根チップ2に面するように設けられた溝であり、特許文献1の図4に示されるように、ケーシングライナ4の内面の全周にわたり複数設けられている。7は溝6内を移動する溝高さ調整部材である。8は溝高さ調整部材7の移動をガイドする軸である。図1上図と下図の比較から分かるように、設計点流量での運転時には溝高さ調整部材7は吐出側(図1の右側)に移動しており、低流量での運転時には溝高さ調整部材7は吸込側(図1の左側)に移動している。
【0016】
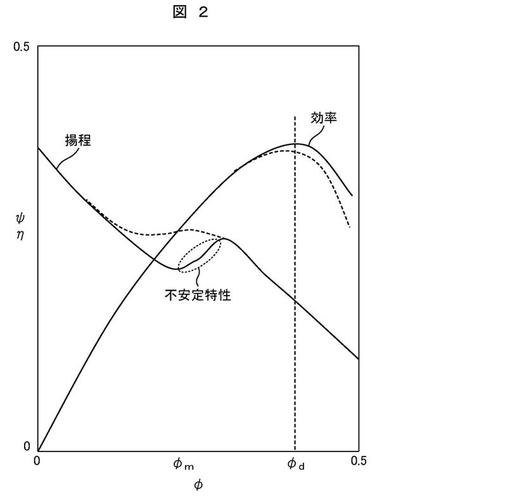
図2は軸流ポンプの揚程と効率の流量特性曲線の概略図である。横軸は流量を表す流量係数φであり、縦軸は揚程、効率を表す揚程係数ψ、ηである。
【0017】
まず、実線で示す従来の流量特性曲線を説明する。この流量特性曲線では、設計点流量φd近傍の運転範囲において効率ηは最大となる。しかしながら、低流量域φm近傍の運転範囲において、揚程曲線が右上がりとなる不安定特性(以下では「右上がり特性」と呼ぶ)が発生する。この右上がり特性は軸流ポンプに構造振動をもたらす要因となるため、通常はこの右上がり特性を解消するか、ポンプ運転範囲よりも高い揚程において右上がり特性が発生するように設計することが要求される。
【0018】
しかしながら、右上がり特性の発生と設計点流量φd近傍の運転範囲における高い効率ηはトレードオフであり、右上がり特性を抑制すると効率ηが低下し、効率ηを向上させると右上がり特性が発生するという関係になっている。
【0019】
ここで、低流量域φm近傍の運転範囲では図1下図の矢印Bに示すように、羽根1の外径側において流れが逆流する。この逆流は羽根1から与えられた角運動量を持っており、矢印Cで示す正流に旋回流れを与える。旋回流れを持った矢印Cの流れを予旋回流れと呼ぶ。この予旋回流れによって羽根入口出口間のオイラーヘッドが減少し、図2に不安定特性として示すような揚程の落ち込みが発生する。
【0020】
右上がり特性を抑制するため、ケーシングライナ4の周方向に複数の溝6を設け、矢印Bが持つ角運動量を溝で相殺して予旋回流れを抑制することにより右上がり特性を防止できるが、溝6によってチップクリアランス5が広がると、漏れ損失が増大し、設計点近傍の運転範囲における効率は低下してしまう。即ち、図2の点線の揚程曲線で示すように、低流量域φm近傍の運転範囲において、右上がり特性を抑制すると、点線の効率曲線で示すように、設計点流量φd近傍の運転範囲での効率が低下する。
【0021】
そこで、本実施例では、このようなトレードオフ関係を解消するため、ポンプの運転条件に応じて、溝の高さを調整する溝高さ調整部材7をケーシングライナ4に設けている。具体的には、溝6の高さを流れの状態に応じて受動的に変化させることができるように、溝6に、溝高さ調整部材7と、この溝高さ調整部材7を貫通する軸8を取り付ける。図1下図で説明したように、低流量域φm近傍の運転範囲では、溝高さ調整部材7近傍に矢印Bに示す逆流が発生するため、この逆流による壁面せん断応力によって、溝高さ調整部材7が吸込側に移動し、ケーシングライナ4と羽根チップ2との間に溝が発生して、逆流が持つ角運動量を相殺する。
【0022】
一方、設計点流量φd近傍の運転範囲では、図1上図の矢印Aに示すように溝高さ調整部材7近傍の流れは吸込側から吐出側に向かう正流であるため、この正流による壁面せん断応力によって溝高さ調整部材7は吐出側に移動し、チップクリアランス5をもとの隙間長さに戻して、効率の低下を防止する。
【0023】
次に、図7を用いて、せん断力による溝高さ調整部材7の可動性を説明する。
【0024】
まず、図1の矢印Aのような主流流速が生じた場合の、溝高さ調整部材7の可動性を説明する。主流流束(u)が8m/sの場合、レイノルズ数(Re)は大凡8×105となる。この場合の摩擦係数(λ)はムーディ線図より1.2〜2.0×10-2となる。壁面摩擦応力は1/2×λρu2で表されるので(ρ:流体密度であり、水の場合103kg/m3)、例えば、摩擦係数(λ)が2.0×10-2の場合、壁面摩擦応力は640[Pa]となる。
【0025】
ここで、溝高さ調整部材7の寸法を、図7のように、高さ7mm、長さ30mm、幅15mmとした場合、溝高さ調整部材7に働く壁面せん断力は0.288[N]となる。溝高さ調整部材7の動摩擦係数を通常の0.5とした場合、0.288[N]の壁面せん断力によって60[g]の溝高さ調整部材7を動かすことができる。これは、密度19.0×103[kg/m3]の溝高さ調整部材7であっても壁面せん断力によって動かすことができることが分かる。
【0026】
同様に、図1の矢印Cのような予旋回流れが生じた場合の、せん断力による溝高さ調整部材7の可動性を説明する。予旋回流れの流速(u)が3m/sの場合、1/2×λρu2で表される壁面摩擦応力は90[Pa]となる。この場合、溝高さ調整部材7に働く壁面せん断力は0.0405[N]となり、この壁面せん断力によって8.5[g]の溝高さ調整部材7を動かすことができることが分かる。
【0027】
ここで、溝高さ調整部材7の材料としてアルミ(密度2.7×103[kg/m3])を選択した場合、溝高さ調整部材7の重さは約8.5[g]となるので、矢印Aの主流流速によっても、矢印Cの予旋回流れによっても、アルミ製の溝高さ調整部材7を受動的に動かすことができる。
【0028】
なお、動摩擦係数が高い場合や、立軸のポンプの場合には、溝高さ調整部材7の材料として、アルミよりも軽量なポリプロピレン(PP)などのプラスチック材料を用いても良い。
【0029】
以上で説明したように、本実施例の軸流ポンプを用いれば、簡易な構成で溝高さ調整部材7を流れの状態に応じて受動的に移動させることができ、溝高さを調整する複雑な機構構造や、溝を軸方向へ移動させるための機械構造が必要ないため、低コストで簡単に製造できる軸流ポンプを得ることができる。
【0030】
なお、本実施例では、ケーシングライナ4の一つの溝6に着目して説明を行ったが、ケーシングライナ4に設けた全ての溝6に本実施例の溝高さ調整部材7を設けることとしても良いし、一部の溝に溝高さ調整部材7を設けることとしても良い。
【実施例2】
【0031】
次に、図3を用いて実施例2を説明する。なお、実施例1と同等の構成については、同じ符号を付し説明を省略することとする。
【0032】
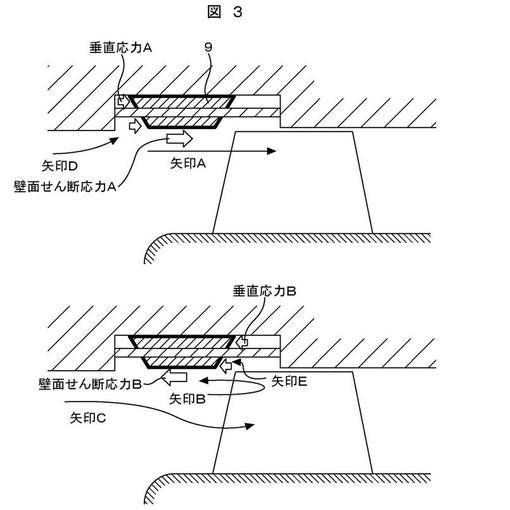
実施例2は、実施例1の溝高さ調整部材7に代え、台形形状の溝高さ調整部材9を用いたものである。図3上図に示すように、設計点流量φd近傍の運転範囲では、矢印Aに示す正流による壁面せん断応力Aに加え、溝の中に流れ込む矢印Dに示す流れによって、垂直応力Aが溝高さ調整部材の吸込側端面に作用し、溝高さ調整部材が正流流れの力によって、吐出側により移動しやすくなる。
【0033】
また、低流量域φm近傍の運転範囲では、矢印Bに示す逆流による壁面せん断応力B以外に、溝の中に流れ込む矢印Eに示す流れによって、垂直応力Bが溝高さ調整部材の吐出側端面に作用し、溝高さ調整部材が逆流流れの力によって、吸込側により移動しやすくなる。
【0034】
なお、図3では溝高さ調整部材の吸込側端面、吐出側端面の両方を切り欠いた台形形状としたが、何れか一方を切り欠いた台形形状としても良い。また、本実施例の構造は、前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例3】
【0035】
次に、図4を用いて実施例3を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0036】
実施例3は、溝高さ調整部材7の内周側に、凸凹構造10を設けたものである。この凸凹構造10により端面での摩擦係数が上昇するため、正流流れや逆流流れによって発生する溝高さ調整部材に作用する壁面せん断応力が増大する。よって、流れの状態に応じて、溝高さ調整部材が吸込側、吐出側により移動しやすくなる。
【0037】
なお、本実施例の構造は前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例4】
【0038】
次に、図5を用いて実施例4を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0039】
実施例4は、実施例1の溝高さ調整部材7および軸8に代え、ケーシングライナ4の溝6の外周方向に溝高さ調整部材11を摺動可能に保持する溝を設けたものである。
【0040】
図5のA−A′断面図に示すように、ケーシングライナ4と溝高さ調整部材11を食い違い構造で接触させる。本実施例の構造を採用することで、実施例1等で示した軸8が不要となり、軸8の強度が問題となるような状況であっても、受動的に移動可能な溝高さ調整部材11を用いることができる。
【0041】
なお、本実施例の構造は、前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例5】
【0042】
次に、図6を用いて実施例5を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0043】
実施例5は、実施例1の溝高さ調整部材7に代え、溝高さ調整部材7よりも小さい複数の溝高さ調整部材12を用いるものである。なお、図6では溝高さ調整部材12が2個である例を示すが、溝高さ調整部材の個数は3個以上であっても良い。
【0044】
これにより、溝高さ調整部材12の各々の重さが軽くなるため、正流及び逆流によって溝高さ調整部材に作用する力が小さくなっても、溝高さ調整部材は流れの状態に応じて軸方向に移動することが可能となる。また流れに対して感度良く溝高さ調整部材が軸方向に可動となる。
【0045】
なお、本実施例の構造は、前述した他の実施例の構造と組み合わせて用いても良い。
【符号の説明】
【0046】
1 羽根
2 羽根チップ
3 ボス
4 ケーシングライナ
5 チップクリアランス
6 溝
7 溝高さ調整部材
8 軸
9 台形形状の溝高さ調整部材
10 凸凹構造
11、12 溝高さ調整部材
【技術分野】
【0001】
本発明は、揚程−流量特性曲線の不安定性を抑制した軸流型流体機械に関する。
【背景技術】
【0002】
従来の軸流型流体機械として、特開2003−013898(特許文献1)がある。同文献の図2に示される軸流型流体機械において、ケーシング(同文献の符号2)の内面に、同文献の図4に示される溝(同文献の符号5)を設けることで、同文献の段落0037で「羽根車1により圧力の上昇した流体が溝5内を溝の下流側終端位置から溝の上流側終端位置に向かって逆流し、低流量時に発生する再循環流(羽根入口逆流)の発生場所に噴出して再循環流の発生を抑制し、再循環流により正流が予旋回を受けるのを抑制することができ、羽根旋回失速の発生を防止できる。」と説明されるように、羽根旋回失速の発生を防止している。
【0003】
しかしながら、単にこの構成を用いたのでは、特許文献1の要約書に記載された課題「軸流型流体機械の揚程−流量特性曲線の右上がり特性を改善し、運転範囲の拡大を図るとともに、安定な運転範囲においては効率低下や振動・騒音の増大を抑制する」ことができない。
【0004】
そこで、特許文献1では、同文献の図1に図示されるように、軸流型流体機械のケーシング(同文献の符号2)内面に、羽根車(同文献の符号1)の入口側とケーシング内面の羽根存在域内を結ぶ圧力勾配方向の溝(同文献の符号5)を周方向に複数本形成し、ケーシング内面に設けた可動部材(同文献の符号6)の移動により、不安定運転域では羽根存在域内に溝が現われ、安定運転域では羽根と溝が干渉しないようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−013898号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、同文献の段落0047で「次に、ケーシングライナ(可動部材)6を移動させる機構について図1により説明する。吸込側のケーシング2、可動部材6及び吐出側のケーシング2にシャフト7が貫通され、吐出側のケーシング2にはモータ8が設けられている。可動部6とシャフト7とはネジ結合されており、モータ8によりシャフト7を回転させ、ネジ部によって可動部材6をL方向やR方向へ移動させる構造となっている。なお、可動機構としては、モータ以外にも油圧シリンダなどを用いることもできる。上記移動機構の制御は、ポンプの内部圧力を計測する圧力センサ、ポンプ吐出量を計測する超音波流量計や電磁流量計などを設け、内部圧力や吐出し量が予め決められた値となったとき、モータやシリンダにより可動部を移動させるようにすれば自動制御を可能にでき」と説明されるように、モータを用いて可動部材を動かすことで、羽根存在領域内に溝を露出させたり隠したりしている。つまり、可動部材を動かすためのモータが必要であり、また、可動部材を動かすか否かを判断するためのセンサや演算回路などが必要だった。
【0007】
本発明は、特許文献1で必須であったモータ、センサ、演算回路などを用いることなく、軸流型流体機械の揚程−流量特性曲線において、低流量域で見られる右上がり特性と呼ばれる不安定特性を防止し、更に設計点近傍の安定な運転範囲においては効率が低下することを防止する軸流型流体機械を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題は、羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝内を移動する溝高さ調整部材と、該溝高さ調整部材の移動をガイドする軸と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動する軸流型流体機械によって解決される。
【0009】
また、羽根車と、該羽根車を覆うケーシングライナと、該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、該溝に食い違い構造で保持され、該溝内を摺動する溝高さ調整部材と、を具備し、前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動する軸流型流体機械によって解決される。
【発明の効果】
【0010】
簡易な構成で、揚程−流量特性曲線の低流量域における不安定特性を設計点近傍での効率の低下を伴うことなく解消でき、低流量域での安定性と、設計点近傍での高効率の両立を図ることができる。
【図面の簡単な説明】
【0011】
【図1】実施例1の軸流ポンプの要部断面図。
【図2】軸流ポンプの揚程と効率の流量特性曲線。
【図3】実施例2の軸流ポンプの要部断面図。
【図4】実施例3の軸流ポンプの要部断面図。
【図5】実施例4の軸流ポンプの要部断面図。
【図6】実施例5の軸流ポンプの要部断面図。
【図7】実施例1の溝高さ調整部材の具体例。
【発明を実施するための形態】
【0012】
以下、図面を用いて、軸流ポンプを例に本発明に係る軸流型流体機械の実施例を説明する。なお、本発明の実施例の軸流型流体機械が前提とする構造は概ね特許文献1の図2、図3、図4と同等であるため、特許文献1と重複する説明を省略することとし、特許文献1の構成と相違する点を中心に本発明の実施例を説明することとする。
【実施例1】
【0013】
図1を用いて、ケーシングと羽根チップとの間に設けられた溝の溝深さを、流れの状態に応じて受動的に変化させる実施例1の軸流ポンプを説明する。なお、図1上図は設計点流量で軸流ポンプを運転しているときの要部断面図であり、図1下図は低流量で軸流ポンプを運転しているときの要部断面図である。
【0014】
図1において、1は羽根、2は羽根1の最外径部分である羽根チップ、3は羽根1が設置されているボスであり、図示しないモータによってボス3が回転するとボス3に設置された羽根1、羽根チップ2も同一の周波数で回転する。以下では羽根1、羽根チップ2、ボス3を総称して羽根車13と呼ぶ。4は羽根車13を覆う静止壁でありケーシングライナである。5はケーシングライナ4と羽根チップ2との間の隙間でありチップクリアランスである。
【0015】
また、6はケーシングライナ4の内周に羽根チップ2に面するように設けられた溝であり、特許文献1の図4に示されるように、ケーシングライナ4の内面の全周にわたり複数設けられている。7は溝6内を移動する溝高さ調整部材である。8は溝高さ調整部材7の移動をガイドする軸である。図1上図と下図の比較から分かるように、設計点流量での運転時には溝高さ調整部材7は吐出側(図1の右側)に移動しており、低流量での運転時には溝高さ調整部材7は吸込側(図1の左側)に移動している。
【0016】
図2は軸流ポンプの揚程と効率の流量特性曲線の概略図である。横軸は流量を表す流量係数φであり、縦軸は揚程、効率を表す揚程係数ψ、ηである。
【0017】
まず、実線で示す従来の流量特性曲線を説明する。この流量特性曲線では、設計点流量φd近傍の運転範囲において効率ηは最大となる。しかしながら、低流量域φm近傍の運転範囲において、揚程曲線が右上がりとなる不安定特性(以下では「右上がり特性」と呼ぶ)が発生する。この右上がり特性は軸流ポンプに構造振動をもたらす要因となるため、通常はこの右上がり特性を解消するか、ポンプ運転範囲よりも高い揚程において右上がり特性が発生するように設計することが要求される。
【0018】
しかしながら、右上がり特性の発生と設計点流量φd近傍の運転範囲における高い効率ηはトレードオフであり、右上がり特性を抑制すると効率ηが低下し、効率ηを向上させると右上がり特性が発生するという関係になっている。
【0019】
ここで、低流量域φm近傍の運転範囲では図1下図の矢印Bに示すように、羽根1の外径側において流れが逆流する。この逆流は羽根1から与えられた角運動量を持っており、矢印Cで示す正流に旋回流れを与える。旋回流れを持った矢印Cの流れを予旋回流れと呼ぶ。この予旋回流れによって羽根入口出口間のオイラーヘッドが減少し、図2に不安定特性として示すような揚程の落ち込みが発生する。
【0020】
右上がり特性を抑制するため、ケーシングライナ4の周方向に複数の溝6を設け、矢印Bが持つ角運動量を溝で相殺して予旋回流れを抑制することにより右上がり特性を防止できるが、溝6によってチップクリアランス5が広がると、漏れ損失が増大し、設計点近傍の運転範囲における効率は低下してしまう。即ち、図2の点線の揚程曲線で示すように、低流量域φm近傍の運転範囲において、右上がり特性を抑制すると、点線の効率曲線で示すように、設計点流量φd近傍の運転範囲での効率が低下する。
【0021】
そこで、本実施例では、このようなトレードオフ関係を解消するため、ポンプの運転条件に応じて、溝の高さを調整する溝高さ調整部材7をケーシングライナ4に設けている。具体的には、溝6の高さを流れの状態に応じて受動的に変化させることができるように、溝6に、溝高さ調整部材7と、この溝高さ調整部材7を貫通する軸8を取り付ける。図1下図で説明したように、低流量域φm近傍の運転範囲では、溝高さ調整部材7近傍に矢印Bに示す逆流が発生するため、この逆流による壁面せん断応力によって、溝高さ調整部材7が吸込側に移動し、ケーシングライナ4と羽根チップ2との間に溝が発生して、逆流が持つ角運動量を相殺する。
【0022】
一方、設計点流量φd近傍の運転範囲では、図1上図の矢印Aに示すように溝高さ調整部材7近傍の流れは吸込側から吐出側に向かう正流であるため、この正流による壁面せん断応力によって溝高さ調整部材7は吐出側に移動し、チップクリアランス5をもとの隙間長さに戻して、効率の低下を防止する。
【0023】
次に、図7を用いて、せん断力による溝高さ調整部材7の可動性を説明する。
【0024】
まず、図1の矢印Aのような主流流速が生じた場合の、溝高さ調整部材7の可動性を説明する。主流流束(u)が8m/sの場合、レイノルズ数(Re)は大凡8×105となる。この場合の摩擦係数(λ)はムーディ線図より1.2〜2.0×10-2となる。壁面摩擦応力は1/2×λρu2で表されるので(ρ:流体密度であり、水の場合103kg/m3)、例えば、摩擦係数(λ)が2.0×10-2の場合、壁面摩擦応力は640[Pa]となる。
【0025】
ここで、溝高さ調整部材7の寸法を、図7のように、高さ7mm、長さ30mm、幅15mmとした場合、溝高さ調整部材7に働く壁面せん断力は0.288[N]となる。溝高さ調整部材7の動摩擦係数を通常の0.5とした場合、0.288[N]の壁面せん断力によって60[g]の溝高さ調整部材7を動かすことができる。これは、密度19.0×103[kg/m3]の溝高さ調整部材7であっても壁面せん断力によって動かすことができることが分かる。
【0026】
同様に、図1の矢印Cのような予旋回流れが生じた場合の、せん断力による溝高さ調整部材7の可動性を説明する。予旋回流れの流速(u)が3m/sの場合、1/2×λρu2で表される壁面摩擦応力は90[Pa]となる。この場合、溝高さ調整部材7に働く壁面せん断力は0.0405[N]となり、この壁面せん断力によって8.5[g]の溝高さ調整部材7を動かすことができることが分かる。
【0027】
ここで、溝高さ調整部材7の材料としてアルミ(密度2.7×103[kg/m3])を選択した場合、溝高さ調整部材7の重さは約8.5[g]となるので、矢印Aの主流流速によっても、矢印Cの予旋回流れによっても、アルミ製の溝高さ調整部材7を受動的に動かすことができる。
【0028】
なお、動摩擦係数が高い場合や、立軸のポンプの場合には、溝高さ調整部材7の材料として、アルミよりも軽量なポリプロピレン(PP)などのプラスチック材料を用いても良い。
【0029】
以上で説明したように、本実施例の軸流ポンプを用いれば、簡易な構成で溝高さ調整部材7を流れの状態に応じて受動的に移動させることができ、溝高さを調整する複雑な機構構造や、溝を軸方向へ移動させるための機械構造が必要ないため、低コストで簡単に製造できる軸流ポンプを得ることができる。
【0030】
なお、本実施例では、ケーシングライナ4の一つの溝6に着目して説明を行ったが、ケーシングライナ4に設けた全ての溝6に本実施例の溝高さ調整部材7を設けることとしても良いし、一部の溝に溝高さ調整部材7を設けることとしても良い。
【実施例2】
【0031】
次に、図3を用いて実施例2を説明する。なお、実施例1と同等の構成については、同じ符号を付し説明を省略することとする。
【0032】
実施例2は、実施例1の溝高さ調整部材7に代え、台形形状の溝高さ調整部材9を用いたものである。図3上図に示すように、設計点流量φd近傍の運転範囲では、矢印Aに示す正流による壁面せん断応力Aに加え、溝の中に流れ込む矢印Dに示す流れによって、垂直応力Aが溝高さ調整部材の吸込側端面に作用し、溝高さ調整部材が正流流れの力によって、吐出側により移動しやすくなる。
【0033】
また、低流量域φm近傍の運転範囲では、矢印Bに示す逆流による壁面せん断応力B以外に、溝の中に流れ込む矢印Eに示す流れによって、垂直応力Bが溝高さ調整部材の吐出側端面に作用し、溝高さ調整部材が逆流流れの力によって、吸込側により移動しやすくなる。
【0034】
なお、図3では溝高さ調整部材の吸込側端面、吐出側端面の両方を切り欠いた台形形状としたが、何れか一方を切り欠いた台形形状としても良い。また、本実施例の構造は、前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例3】
【0035】
次に、図4を用いて実施例3を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0036】
実施例3は、溝高さ調整部材7の内周側に、凸凹構造10を設けたものである。この凸凹構造10により端面での摩擦係数が上昇するため、正流流れや逆流流れによって発生する溝高さ調整部材に作用する壁面せん断応力が増大する。よって、流れの状態に応じて、溝高さ調整部材が吸込側、吐出側により移動しやすくなる。
【0037】
なお、本実施例の構造は前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例4】
【0038】
次に、図5を用いて実施例4を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0039】
実施例4は、実施例1の溝高さ調整部材7および軸8に代え、ケーシングライナ4の溝6の外周方向に溝高さ調整部材11を摺動可能に保持する溝を設けたものである。
【0040】
図5のA−A′断面図に示すように、ケーシングライナ4と溝高さ調整部材11を食い違い構造で接触させる。本実施例の構造を採用することで、実施例1等で示した軸8が不要となり、軸8の強度が問題となるような状況であっても、受動的に移動可能な溝高さ調整部材11を用いることができる。
【0041】
なお、本実施例の構造は、前述した、或いは、後述する他の実施例の構造と組み合わせて用いても良い。
【実施例5】
【0042】
次に、図6を用いて実施例5を説明する。なお、以上の実施例と同等の構成については、同じ符号を付し説明を省略することとする。
【0043】
実施例5は、実施例1の溝高さ調整部材7に代え、溝高さ調整部材7よりも小さい複数の溝高さ調整部材12を用いるものである。なお、図6では溝高さ調整部材12が2個である例を示すが、溝高さ調整部材の個数は3個以上であっても良い。
【0044】
これにより、溝高さ調整部材12の各々の重さが軽くなるため、正流及び逆流によって溝高さ調整部材に作用する力が小さくなっても、溝高さ調整部材は流れの状態に応じて軸方向に移動することが可能となる。また流れに対して感度良く溝高さ調整部材が軸方向に可動となる。
【0045】
なお、本実施例の構造は、前述した他の実施例の構造と組み合わせて用いても良い。
【符号の説明】
【0046】
1 羽根
2 羽根チップ
3 ボス
4 ケーシングライナ
5 チップクリアランス
6 溝
7 溝高さ調整部材
8 軸
9 台形形状の溝高さ調整部材
10 凸凹構造
11、12 溝高さ調整部材
【特許請求の範囲】
【請求項1】
羽根車と、
該羽根車を覆うケーシングライナと、
該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、
該溝内を移動する溝高さ調整部材と、
該溝高さ調整部材の移動をガイドする軸と、
を具備し、
前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【請求項2】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材は、吸込側端面と吐出側端面を斜め形状とした台形形状のものであることを特徴とする軸流型流体機械。
【請求項3】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材は、内周側に凸凹構造を設けたことを特徴とする軸流型流体機械。
【請求項4】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材を複数設けたことを特徴とする軸流型流体機械。
【請求項5】
羽根車と、
該羽根車を覆うケーシングライナと、
該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、
該溝に食い違い構造で保持され、該溝内を摺動する溝高さ調整部材と、
を具備し、
前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【請求項1】
羽根車と、
該羽根車を覆うケーシングライナと、
該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、
該溝内を移動する溝高さ調整部材と、
該溝高さ調整部材の移動をガイドする軸と、
を具備し、
前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【請求項2】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材は、吸込側端面と吐出側端面を斜め形状とした台形形状のものであることを特徴とする軸流型流体機械。
【請求項3】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材は、内周側に凸凹構造を設けたことを特徴とする軸流型流体機械。
【請求項4】
請求項1に記載の軸流型流体機械において、
前記溝高さ調整部材を複数設けたことを特徴とする軸流型流体機械。
【請求項5】
羽根車と、
該羽根車を覆うケーシングライナと、
該ケーシングライナの内周に前記羽根チップに面するように設けられた溝と、
該溝に食い違い構造で保持され、該溝内を摺動する溝高さ調整部材と、
を具備し、
前記羽根車の羽根チップ近傍の流れの状態に応じて、前記溝高さ調整部材が吸込側または吐出側に受動的に移動することを特徴とする軸流型流体機械。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−87623(P2013−87623A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−225436(P2011−225436)
【出願日】平成23年10月13日(2011.10.13)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月13日(2011.10.13)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]