
輪状吻合を実施するための外科用ステープルデバイス
【課題】輪状吻合を実施するための外科用ステープルデバイスを提供する。
【解決手段】外科用ステープルデバイス10であって、ハンドル部分12;該ハンドル部分から遠位に伸延する細長体部分14;アンビルアセンブリ30および複数のステープルを収容するシェルアセンブリ31を備えるヘッド部分16であって、該アンビルアセンブリは細長体部分の間隙部分と細長体部分接近部分との間で該シェルアセンブリに関して移動可能である、ヘッド部分;該アンビルアセンブリに解放可能に係合するアンビル保持具を備える接近機構;および該アンビル保持具によってスライド可能に支持されるトローカルを備える収縮可能トロカールアセンブリであって、該アンビル保持具中に位置付けられるトロカール収縮部分の間で、該アンビル保持具から伸延する前進部分まで移動可能である、収縮可能トロカールアセンブリを備える外科用ステープルデバイス、を提供する。
【解決手段】外科用ステープルデバイス10であって、ハンドル部分12;該ハンドル部分から遠位に伸延する細長体部分14;アンビルアセンブリ30および複数のステープルを収容するシェルアセンブリ31を備えるヘッド部分16であって、該アンビルアセンブリは細長体部分の間隙部分と細長体部分接近部分との間で該シェルアセンブリに関して移動可能である、ヘッド部分;該アンビルアセンブリに解放可能に係合するアンビル保持具を備える接近機構;および該アンビル保持具によってスライド可能に支持されるトローカルを備える収縮可能トロカールアセンブリであって、該アンビル保持具中に位置付けられるトロカール収縮部分の間で、該アンビル保持具から伸延する前進部分まで移動可能である、収縮可能トロカールアセンブリを備える外科用ステープルデバイス、を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、仮出願番号60/281,259(2001年4月3日出願)、60/327,653(2001年10月5日出願)および60/363,715(2002年3月11日出願)(これら全てはその全体が本明細書中で参考として援用される)の優先権を主張する。
【背景技術】
【0002】
(背景)
(1.技術分野)
本開示は一般に、身体組織に外科用ステープルを適用するための外科用ステープルデバイスに関する。より詳細には、本開示は、中空組織器官の輪状吻合を実施するための外科用ステープルデバイスに関する。
【0003】
(2.関連分野の背景)
吻合は、別個の中空器官部分が互いに連絡するためのこれらの部分の外科用連結である。代表的には、吻合手順は、中空組織の疾患部分または欠陥部分が除去され、そして残りの末端部分が連結される手術に続く。所望の吻合手順に依存して、これらの末端部分は、輪状、末端と側面、または側面と側面の器官再構築方法のいずれかによって連結され得る。
【0004】
輪状吻合手順において、器官部分の2つの末端は、ステープル器具によって連結され、このステープル器具は、各器官部分の末端部分を通してステープルの輪状アレイを進め、同時に任意の重なった組織に穴を開けて、管状通路を自由にする。中空器官の輪状吻合を実施するための器具の例は、米国特許第6,053,390号、同第5,588,579号、同第5,119,983号、同第5,005,749号、同第4,646,745号、同第4,576,167号および同第4,473,077号に記載される。代表的には、これらの器具は、近位端にハンドル部分を有するこの器具を作動するための細長シャフト、および遠位端に配置されたステープル保持要素を備える。取付けアンビルヘッドを有するアンビルロッドを備えるアンビルアセンブリは、遠位端に取り付けられる。ステープリングされる器官の反対側の末端部分は、このアンビルヘッドとステープル保持要素との間で留められる。この留められた組織は、ステープル保持要素から1つ以上のステープルを進めることによって、ステープリングされ、その結果、このステープルの端部は、組織を通過して、アンビルヘッドにより変形される。
【0005】
一般に、吻合手順の間、このアンビルアセンブリは、ステープルデバイスから分離され、そして患者内の組織部分の1つの中に配置され、そしてこのステープルデバイスは、他の部分組織内に配置される。その後、このアンビルアセンブリおよびステープルデバイスは、この組織部分をその間に留めるために再び取り付けられる。代表的には、配置は、アンビルアセンブリおよびステープル器具の1つまたは両方について、取り外し可能トロカールの使用を必要とする。外科用部位に対する視感度および接近性に対する制限に起因して、トロカールをアンビルアセンブリおよび/またはステープルデバイスに取付けそして取り外すことは、外科医にとって困難でありそして時間がかかり得る。さらに、このアンビルアセンブリがステープルデバイスに適切に再び取り付けられたか否かを決定することは、困難であり得る。
【発明の概要】
【課題を解決するための手段】
【0006】
(要旨)
本開示によると、輪状吻合を実施するための外科用ステープルデバイスが開示される。この外科用ステープルデバイスは、ハンドル部分、細長本体部分ならびにアンビルアセンブリおよびシェルアセンブリを含むヘッド部分を備える。このハンドル部分は、アンビルアセンブリおよびシェルアセンブリを接近させるための回転可能な接近ノブ、ならびにこのシェルアセンブリ内に配置されたステープルを発射するために発射機構を作動するための発射トリガーを備える。この発射トリガーは、この発射機構を作動するために設けられた二棒リンク機構(two bar linkage)の1つのリンクを形成する。この二棒リンク機構は、デバイスを発射するのに必要な発射力を減少するという改良された機械的利点を有するデバイスを提供する。
【0007】
ヘッド部分は、傾斜可能なアンビルを含むアンビルアセンブリを備え、この傾斜可能なアンビルは、デバイスの発射後に自動的に傾き、このアンビルアセンブリおよびシェルアセンブリを引き離す。この傾斜可能なアンビルは、減少したアンビルプロフィールを提供し、吻合手順が行われた後のデバイスの取り外しを簡単にする。このヘッド部分はまた、取り外し可能トロカールアセンブリを備え、これはアンビル保持具内にスライド可能に配置され、そしてアンビルアセンブリがこのアンビル保持具に取り付けられそして取り外された場合に、自動的に前進しそして引っ込められる。この収縮可能トロカールアセンブリは、トロカールをステープルデバイスに取付けそして取り外す工程を排除することによって、吻合手順を簡単にする。ロックアウトチューブが設けられ、そしてアンビルアセンブリと取り外し可能に係合するためのアンビル保持具の周りに配置される。このロックアウトチューブは、例えば、所定の程度の接近後のステープルデバイスの発射の間、アンビル保持具からアンビルアセンブリが誤って外れることを防止する。
【0008】
この外科用ステープルデバイスはまた、発射ロックアウトアセンブリを備え、これは、アンビルがデバイスに取り付けられ、そしてアンビルが接近されるまで、発射トリガーの作動を防止する。1つの好ましい実施形態において、発射ロックアウトアセンブリは、トリガーロックおよび安全ブラケットを備え、この安全ブラケットは、アンビルがデバイスに取り付けられ、そして接近されるまで、ロック位置からアンロック位置までのトリガーの移動を防止する。このロックアウトアセンブリはまた、デバイスが発射された後に、トリガーロックをロック位置に戻すためのロックアウトスリーブを備える。このロックアウトアセンブリは、外科医が、取り付けられたアンビルを用いずにデバイスを不注意に発射し、そしてすでに発射されそしてステープルを有さないデバイスを誤って発射するのを防ぐ。
【0009】
外科用ステープルデバイスはまた、触覚表示機構を備える。1つの好ましい実施形態において、この触覚表示機構は、デバイスが発射されたことを外科医に知らせる。別の好ましい実施形態において、この触覚表示器は、アンビルヘッドがアンビルヘッドを傾けるのに十分な距離離れ、従って、このデバイスが患者から取り出され得ることを外科医に知らせる。
【0010】
本発明はさらに、以下の項目も提供する。
(項目1)
外科用ステープルデバイスであって、以下:
ハンドル部分;
該ハンドル部分から遠位に伸延する細長体部分;
アンビルアセンブリおよび複数のステープルを収容するシェルアセンブリを備えるヘッド部分であって、該アンビルアセンブリは細長体部分の間隙部分と細長体部分接近部分との間で該シェルアセンブリに関して移動可能である、ヘッド部分;
該アンビルアセンブリに解放可能に係合するアンビル保持具を備える接近機構;および
該アンビル保持具によってスライド可能に支持されるトローカルを備える収縮可能トロカールアセンブリであって、該アンビル保持具中に位置付けられるトロカール収縮部分の間で、該アンビル保持具から伸延する前進部分まで移動可能である、収縮可能トロカールアセンブリ
を備える、外科用ステープルデバイス。
(項目2)
前記ハンドル部分が、該アンビル保持具に作動可能に接続された接近アクチュエーターを備え、該接近アクチュエーターは、前記細長体部分間隙部分と細長体部分接近部分との間で前記アンビルアセンブリおよびシェルアセンブリを移動するために移動可能である、項目1に記載の外科用ステープルデバイス。
(項目3)
項目2に記載の外科用ステープルデバイスであって、ここで、前記ハンドル部分が発射トリガーを備え、そして前記シェルアセンブリはプッシャーを備え、該発射トリガーは、該プッシャーに作動可能に接続されており、該発射トリガーの発動作用によって、前記シェルアセンブリ中での該プッシャーの移動がもたらされ、該シェルアセンブリからステープルを射出する、外科用ステープルデバイス。
(項目4)
前記収縮可能トロカールアセンブリは、前記トロカールに固定され、かつ前記伸長位置にトロカールを保持するために位置付けられるた係合部材を備える、項目1に記載の外科用ステープルデバイス。
(項目5)
前記係合部材が、前記アンビル保持具の輪状エッジを係合して、前記トロカールを前記伸長位置に保持するためのショルダーを有する少なくとも1つの弾性脚を備える、項目4に記載の外科用ステープルデバイス。
(項目6)
前記トロカールが、該トロカールの長さの少なくとも一部分にそって伸延するスロットを備え、該スロットは、前記係合部材を受けるように配置され、かつ寸法決めされる、項目5に記載の外科用ステープルデバイス。
(項目7)
前記アンビルアセンブリが、穴がその中に形成されるセンターロッドを備え、該穴は、該アンビル保持具を該アンビルアセンブリに結合する間に、該アンビル保持具の中で前記トロカールアセンブリの周りに位置付けられるために寸法決めされ、該トロカールが残基収縮位置まで移動される、項目6に記載の外科用ステープルデバイス。
(項目8)
前記アンビル保持具が、前記アンビルアセンブリのセンターロッドに解放可能に係合する位置付けられる複数の可撓性脚部を備える、項目7に記載の外科用ステープルデバイス。(項目9)
前記アンビル保持具が、前記アンビルアセンブリの前記センターロッドに解放可能に係合する位置付けられる複数の可撓性脚部を備える、項目1に記載の外科用ステープルデバイス。
(項目10)
項目9に記載の外科用ステープルデバイスであって、該デバイスは、前記アンビル保持具の周りにスライド可能に位置付けられるロックアウトチューブを備え、該ロックアウトチューブは、前記アンビルアセンブリおよび前記シェルアセンブリの近接の間で、該アンビル保持具の可撓性脚部の周囲に位置付けられ、細長体部分該アンビル保持具によるアンビルアセンブルからの該アンビルアセンブリの不慮の脱係合を防ぐ、外科用ステープルデバイス。
(項目11)
項目1に記載の外科用ステープルデバイスであって、インジケーターセンブリをさらに備え、該インジケーターセンブリは前記ハンドル部分に支持されたインジケーターを備え、該インジケーターは、前記アンビルと作動可能に結合して、前記アンビルアセンブリが前記アンビル保持具に結合しているか否かを識別する視覚的な指標を提供する、外科用ステープルデバイス。
(項目12)
項目11に記載の外科用ステープルデバイスであって、前記アンビルアセンブリがセンターロッドを備え、該センターロッドは、前記アンビル保持具に対する前記アセンブリの結合の間、前記収縮可能アセンブリと係合するように配置されて、トロカールを前記伸長位置から前記収縮位置へと移動させる、外科用ステープルデバイス。
(項目13)
項目11に記載の外科用ステープルデバイスであって、前記トロカールが前記インジケーターセンブリに作動可能に接続しており、その結果、前記伸長位置と収縮位置との間の該トロカールの移動によって、該インジケーターの移動がもたらされる、外科用ステープルデバイス。
(項目14)
前記細長体部分を通って伸延したワイヤーによって、前記トロカールが前記インジケーターに作動可能に接続している、項目13に記載の外科用ステープルデバイス。
(項目15)
外科用デバイスであって、以下:
ハンドル部分;
該ハンドル部分から遠位に伸延する本体部分;
細長体部分アンビルアセンブリおよびシェルアセンブリを備えるヘッド部分であって、該アンビルアセンブリは細長体部分間隙部分と細長体部分接近部分との間で該シェルアセンブリに対して移動可能である、ヘッド部分;
該アンビルアセンブリに解放可能に係合するように配置されるアンビル保持具を備える接近機構;ならびに
該ハンドル部分によって支持され、そして発射準備位置と発射非準備位置との間で移動可能であるインジケーター部材を備えるインジケーターセンブリであって、該インジケーターは、該アンビルアセンブリと作動可能に結合し、その結果、該インジケーター部材は、アンビルアセンブリが取り付けられない限り、該アンビル保持具に該発射可能位置まで移動しない、
外科用ステープルデバイス。
(項目16)
項目15に記載の外科用ステープルデバイスであって、前記アンビル保持具によって支持される移動可能なセンサーをさらに備え、該センサーは、該アンビル保持具との該アンビルアセンブリの係合および脱係合の間に、該アンビルアセンブリに係合するように位置付けられる、外科用ステープルデバイス。
(項目17)
前記センサーが伸長コネクターによって前記インジケーターセンブリと接続されている、項目16に記載の外科用ステープルデバイス。
(項目18)
項目17に記載の外科用ステープルデバイスであって、前記インジケーターセンブリが、回転可能ディスクを備え、前記伸長コネクターが該回転可能ディスクと前記センサーとの間で接続され、その結果、該センサーの移動によって、該回転可能ディスクの回転がもたらされる、外科用ステープルデバイス。
(項目19)
項目18に記載の外科用ステープルデバイスであって、ここで、前記接近機構がネジ部材を備え、該ネジ部材は、前記アンビル保持具に作動可能に接続し、そして、接続アクチュエーターの回転に応答して、前記ハンドル部分内を軸方向に移動可能である、外科用ステープルデバイス。
(項目20)
項目19に記載の外科用ステープルデバイスであって、ここで、前記旋回可能なディスクは、前記インジケーターで形成されたカムスロットにおいてスライド可能に受け入れられるように配置された突出部を備え、該ディスクは前記ネジとともに移動可能であって、前記アンビルアセンブリと前記シェルアセンブリとの接近の間に、該インジケーターの移動を与え、該デバイスが接近したか否かを識別する指標を提供する、外科用ステープルデバイス。
(項目21)
輪状外科用ステープルデバイスの伸長中空シャフトにおける用途のためのプッシャーリンクであって、該ステープルデバイスは、以下:
伸長プッシャーリンクであって、長手軸、近位端、遠位端、それのそれぞれの近位端および遠位端に隣接する輪状部分、ならびに該輪状部分の間であり、そして該輪状部分に接続する伸長中間部分を有する、伸長プッシャーリンク;
該プッシャーリンクの近位端に近位に位置付けられ、そして、該近位端に接続される、発射アクチュエーター;
該プッシャーリンクの遠位端に作動可能に結合するシェルアセンブリであって、該シェルアセンブリは、複数のステープルを収容し、かつアンビルアセンブリに接続可能な伸長部材を有している、シェルアセンブリ;
該プッシャーリンクを収容するための伸長穴を有する、伸長管シャフト、および
該管シャフト中で、該管シャフトの直径に沿って収容された、一対の伸長した実質的に平坦な伸長部材;
を備え、
ここで、該プッシャーリンクの中間部分の一部分は、該プッシャーリンクの長手軸を横切る垂直切片で見た場合にU字形状の構成を有し、該U字形状の構成は、実質的に平坦な底壁を備え、該底壁は、管シャフトの直径に平行であって、該管シャフトの直径の一方の側に配置され、そして、該管シャフトの直径に隣接し、該底壁の各端は、該直径を横断して、かつ該管シャフトの穴の内面の一部分にそって隣接する直立した側壁を有し、該底壁は該管シャフトの穴の半径の半分よりも小さい厚さを有する、プッシャーリンク。
(項目22)
前記伸長部材は、前記プッシャーリンクの底面壁に隣接する前記管シャフトの直径に沿って配置される、項目21に記載のプッシャーリンク。
【図面の簡単な説明】
【0011】
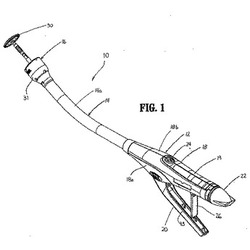
【図1】図1は、ここで開示される外科用ステープルデバイスの一実施形態の近位端からの立側面斜視図である。
【図2】図2は、図1に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図3】図3は、ここで開示される外科用ステープルデバイスの別の好ましい実施形態の近位端からの立側面斜視図である。
【図4】図4は、図3に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図5】図5は、ここで開示される外科用ステープルデバイスの別の好ましい実施形態の近位端からの立側面斜視図である。
【図6】図6は、図5に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図7】図7は、図1に示される外科用ステープルデバイスの近位端の立側面斜視図であり、ここでハンドルは取り外されている。
【図8−1】図8は、図7に示される外科用ステープルデバイスの近位端の立側面斜視図であり、ここで部品は分離されている。
【図8−2】図8Aは、図8に示される細部の指定された領域の拡大図である。図8Bは、図8に示される外科用ステープルデバイスの触覚表示器の立側面斜視図である。
【図9−1】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−2】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−3】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−4】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−5】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図11】図11Aは、図11に示される外科用ステープルデバイスのネジおよびネジ止めアセンブリの側立面部分断面図である。図11Bは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図である。図11Cは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図であり、ここでこのカム調整機構は、反時計回り方向に回転される。図11Dは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図であり、ここでこのカム調整機構は、時計回り方向に回転される。
【図12】図12は、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の上面斜視図である。
【図13】図13は、図12に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の底面斜視図である。
【図14】図14は、図1に示される外科用ステープルデバイスの回転可能スリーブおよび発射ロックアウトアセンブリの立側面斜視図であり、ここで部品は分離されている。
【図15】図15は、図1に示される外科用ステープルデバイスのアンビルアセンブリの立側面斜視図である。
【図15A】図15Aは、図1に示される外科用ステープルデバイスのアンビルアセンブリの遠位端からの立面斜視図である。
【図15B】図15Bは、図15に示される外科用ステープルデバイスのアンビルセンターロッドの近位端の断面図である。
【図15C】図15Cは、図15に示されるアンビルアセンブリのアンビルセンターロッドの遠位端に配置されたトロカールの側断面図である。
【図16】図16は、図15に示されるアンビルアセンブリの立側面斜視図であり、ここで部品は分離されている。
【図16A】図16Aは、図15に示されるアンビルアセンブリの側断面図である。
【図16B】図16Bは、図15に示されるアンビルアセンブリの側断面図であり、ここで、バックアッププレートおよび切断リングは遠位に進められている。
【図17】図17は、図14に示される回転可能スリーブおよび発射ロックアウトアセンブリの遠位端からの立側面斜視図である。
【図18】図18は、図14に示される回転可能スリーブおよび発射ロックアウトアセンブリの近位端からの立側面斜視図である。
【図19−1】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−2】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−3】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−4】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−5】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図20−1】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−2】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−3】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−4】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−5】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−6】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図21−1】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−2】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−3】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−4】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−5】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図22−1】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−2】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−3】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−4】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図23−1】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−2】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−3】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−4】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−5】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図24−1】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−2】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−3】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−4】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−5】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図25】図25は、未接近位置での、本発明により開示される外科用ステープルデバイスの1実施形態の前方透視図である。
【図26】図26は、接近位置での、図25に示される外科用ステープルデバイスのヘッド部分の透視図である。
【図27】図27は、図25に示される外科用ステープルデバイスの後方透視図である。
【図28】図28は、図25に示される外科用ステープルデバイスの上面図である。
【図29】図29は、図25に示される外科用ステープルデバイスの側面図である。
【図30】図30は、図25に示される外科用ステープルデバイスの側方透視図であり、静止ハンドルの区画が取り外されている。
【図31】図31は、ハンドル部分の一部が分解されたアンビルアセンブリを除外する、図25に示される外科用ステープルデバイスの部分的に切り取った透視図である。図31Aは、図25に示される外科用ステープルデバイスの発射機構の後方リンクおよび安全リンクの透視図である。
【図32】図32は、図25に示される外科用ステープルデバイスの前方部分的切り取り透視図であり、静止ハンドル、トリガーおよびインジケーターアセンブリが取り外されている。図32Aは、図32の近位部分の後方透視図である。
【図33】図33は、図32の近位部分の拡大図である。
【図34】図34は、図25に示される外科用ステープルデバイスの拡大した本体部分およびヘッド部分(アンビルを除く)の分解された部分の透視図である。図34Aは、図34に詳細に示された、指示された領域の拡大図である。図34Bは、図34に詳細に示された、指示された領域の拡大図である。
【図35】図35は、プッシャーリンクの近位末端およびインジケーターコネクタアセンブリの分解された部分の透視図である。
【図36】図36は、図25に示される外科用ステープルデバイスの接近機構の遠位部分および引き込み可能トロカールアセンブリの分解された部分の透視図である。
【図37】図37は、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面透視図である。
【図38】図38は、図37に示されるインジケーターアセンブリの分解された部分の平面透視図である。
【図38A】図38Aは、図37に示されるインジケーターアセンブリの底部透視図である。
【図39】図39は、図25に示される外科用ステープルデバイスのトリガーアセンブリの透視図である。
【図40】図40は、図39に示されるトリガーアセンブリの分解された部分の透視図である。
【図41】図41は、図25に示される外科用ステープルデバイスのアンビルアセンブリの後方透視図である。
【図42】図42は、図41に示されるアンビルアセンブリの前方透視図である。
【図43】図43は、図41に示されるアンビルアセンブリの後方透視図であり、取り外し可能なトロカールが、アンビルセンターロッドに装着されている。
【図44】図44は、図25に示される外科用ステープルデバイスのアンビルアセンブリの分解された部分の透視図である。
【図45】図45は、装着前の、図43に示されたアンビルアセンブリおよび取り外し可能なトロカールの側方断面図である。
【図46】図46は、装着された構成でのアンビルアセンブリおよび取り外し可能なトロカールの側方断面図である。
【図47】図47は、デバイスの接近および発射前の、図25に示される外科用ステープルデバイスのハンドル部分の側面図であり、静止ハンドルの区画が取り外されている。
【図48】図48は、図25に示される外科用ステープルデバイスの側方断面図である。
【図49】図49は、図48に詳細に示された、指示された領域の拡大図である。
【図49A】図49Aは、図49に詳細に示された、指示された領域の拡大図である。
【図50】図50は、図48に詳細に示された、指示された領域の拡大図である。
【図51】図51は、アンビルアセンブリを除いた外科用ステープルデバイスのヘッド部分の側方断面図であり、トロカールアセンブリは伸ばされた位置にある。
【図52】図52は、図50の断面線52−52に沿ってとった側方断面図である。
【図53】図53は、アンビル保持具へのアンビルアセンブリの装着直前の、図25に示される外科用ステープルデバイスの遠位末端の側方断面図である。
【図53A】図53Aは、アンビル保持具へのアンビルアセンブリの装着の間の、図25に示される外科用ステープルデバイスの遠位末端の側方断面図である。
【図54】図54は、図25に示される外科用ステープルデバイスの遠位末端の側方断面図であり、アンビルアセンブリは、シェルアセンブリから間隔が開けられている。図54Aは、図54に詳細に示された、指示された領域の拡大図である。図54Bは、図54に詳細に示された、指示された領域の拡大図である。
【図55】図55は、図25に示される外科用ステープルデバイスの側方断面図であり、アンビルアセンブリおよびシェルアセンブリは、接近した位置にある。
【図56】図56は、図55に詳細に示された、指示された領域の拡大図である。
【図57】図57は、図55に詳細に示された、指示された領域の拡大図である。図57Aは、図57に詳細に示された、指示された領域の拡大図である。
【図58】図58は、デバイスが接近した後、かつ発射トリガーの発射動作開始の間の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図59】図59は、デバイスが接近した後、かつ発射トリガーの発射動作終了の間の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図60】図60は、発射トリガーの発射動作後の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図61】図61は、発射トリガーの発射動作後の、トリガーが開放された、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図62】図62は、接近位置にある、図25に示される外科用ステープルデバイスのヘッド部分の側方断面図である。
【図63】図63は、図25に示される固定デバイスのアンビルアセンブリの透視図であり、アンビルヘッドおよびアンビルが取り外されている。
【図64】図64は、図25に示される固定デバイスのアンビルアセンブリの側面図であり、アンビルヘッドアセンブリの一部が破線である。
【図65】図65は、デバイスの発射動作中の、図25に示される外科用ステープルデバイスのヘッド部分の側方断面図である。
【図66】図66は、固定デバイスの発射動作中のアンビルアセンブリの、一部が破線で示された側面図である。
【図67】図67は、図66に示されたアンビルアセンブリの側面図であり、アンビルヘッドアセンブリが、部分的に傾いた位置にある。
【図68】図68は、完全に傾いた位置にある、図66に示されたアンビルアセンブリの側面図である。
【図69】図69は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターの底部透視図である。
【図70】図70は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターの底面図である。
【図71】図71は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターアームの平面図である。
【図72】図72は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケータープレートの底面図である。
【図73】図73は、デバイスのアンビル装着および接近の前の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【図74】図74は、アンビルアセンブリが装着された後であるが、デバイスの接近の前の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【図75】図75は、アンビルアセンブリが装着され、そしてデバイスが接近した後の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【発明を実施するための形態】
【0012】
(好ましい実施形態の詳細な説明)
本発明により開示される外科用ステープルデバイスの好ましい実施形態は、本明細書中で、図面を参照して詳細に記載され、ここで、同様の参照番号は、いくつかの図面の各々において、同一の要素または対応する要素を示す。
【0013】
図1〜6は、一般に10で示される、本発明により開示される外科用ステープルデバイスの1つの好ましい実施形態を示す。簡潔には、外科用ステープルデバイス10は、近位ハンドル部分12、伸長した中心的本体部分14(この中心的本体部分14は、曲がった伸長外側チューブ14aを含む)および遠位ヘッド部分16を備える。あるいは、いくつかの外科用手順(例えば、痔の処置)において、実質的に真っ直ぐな中心的本体部分を有することが所望される。図3および図4を参照のこと。さらに、本体部分14およびヘッド部分16の長さおよび/または直径は、特定の外科用手順に適するように変化し得る。図5および図6を参照のこと。本記載を通じて、用語「近位」とは、作業者に最も近い機器の部分をいい、そして用語「遠位」とは、作業者から最も離れた機器の部分をいう。
【0014】
ハンドル部分12は、静止ハンドル18、発射トリガー20、回転可能接近ノブ22およびインジケーター開口部24を備える。静止ハンドル18は、好ましくは、熱可塑性ハンドル区画18aおよび18b(例えば、ポリカーボネート)から形成され、これらは、一緒になって、ハンドル部分12の内部構成要素についてのハウジングを規定する。ハンドル区画18aおよび18bは、好ましくは、超音波溶接によって一緒に固定される。あるいは、他の公知の固定技術(ネジ、接着剤、スナップフィットコネクタなどを含む)が使用され得る。ハンドル部分12の内部構成要素は、以下に詳細に考察される。クッション性および/または弾性の耐滑り性グリップ19は、好ましくはオーバーモールド手段を使用して、ハンドル区画18aおよび18bならびに発射トリガー20に固定されるかまたはこれらの一部として含まれる。グリップ19は、ネオプレンまたはゴムから形成され得る。あるいは、他の適切な材料および接合技術が使用され得る。旋回可能に取りつけられたトリガーロック26は、ハンドル部分12に固定され、そして固定デバイス10の不慮の発射を防止するために手動で位置付けられる。インジケーター開口部24は、開口部または半透明表面を規定し、これらは、固定デバイス10が、発射準備位置にあるか否かを識別する、内部に配置されたインジケーターを見ることを容易にする。
【0015】
ヘッド部分16は、アンビルアセンブリ30およびシェルアセンブリ31を備える。これらのアセンブリの各々は、以下に詳細に考察される。他に示される場合を除き、外科用デバイス10の構成要素は、ポリカーボネートを含む熱可塑性材料ならびにステンレス鋼およびアルミニウムを含む金属から形成される。特定の構成要素を形成するために選択される特定の材料は、特定の構成要素の強度要件に依存する。例えば、このアンビルは、ステンレス鋼のような金属から形成され、そしてこの静止ハンドルは、ポリカーボネートのような熱可塑性材料から形成される。あるいは、好ましくは滅菌手順に耐え得る、上に列挙されない他の材料が使用されて、固定デバイス10の構成要素を形成し得、但し、これらの材料は、外科用使用に適切であり、かつ特定の構成要素の強度要件を満たす。
【0016】
図7および8は、外科用ステープルデバイス10のハンドル部分12の内部構成要素を示す。ハンドル部分12は、指示機構、ロックアウト機構、接近機構の近位構成要素および発射機構、ならびにこの外科用ステープルデバイスの安全および効果的作動を得るための他の機構を収容する。これらの機構の各々は、以下に詳細に記載される。
【0017】
(接近機構)
図7〜14を参照して、接近機構は、接近ノブ22、回転可能なスリーブ33(図14)、ネジ32、それぞれ、第一のネジ外延34および第二のネジ外延36(図9)、ならびにアンビル保持具アセンブリ38(図10)を備える。回転可能なスリーブ33は、小さい直径の円筒型中空本体部分40および大きい直径の中空本体部分42を備える。本体部分40および42は、センターボア33aを規定する。本体部分42は、静止ハンドル18の内壁上に形成された内側に伸びる輪状フランジ46を受容するように寸法決めされた、輪状溝44を備える(図7)。溝44とフランジ46との間の係合は、比較的回転可能にしたままで、静止ハンドル18内のスリーブ30を軸方向に固定する。回転可能スリーブ33の中空本体部分40の近位末端は、静止ハンドル18の近位末端に形成される開口部を通って伸び、そして正反対に伸びたリブ48を備える。接近ノブ22は、キャップ22aおよび本体22bを備え、これらは、スリーブ30のリブ48を受容するように構成された正反対に伸びたスロット49aを有するボア49を規定し、その結果、ノブ22の回転は、スリーブ30の同時回転をもたらす。
【0018】
ネジ32の近位末端は、螺旋状チャネル50を備え、そして回転可能スリーブ33のセンターボア33a内にスライド可能に配置されるように寸法決めされる。ピン52(図14)は、スリーブ33の本体部分42を通って螺旋状チャネル50に放射状に伸びる。スリーブ33は、静止ハンドル18に関して軸方向に固定されるので、ネジ32の周りでのスリーブ33の回転は、ピン52をネジ32のチャネル50に沿って移動させて、静止ハンドル18内のネジ32の軸方向の移動をもたらす。軸方向に伸びる溝32aは、ネジ32の遠位部分に沿って形成される。溝32aは、以下に記載されるような指示リンクまたはワイヤを受容するように寸法決めされる。
【0019】
ネジ32の遠位末端は、横行スロット54を備える。上部のネジ外延34および下部のネジ外延36(図9)は、それぞれ、近位に位置した可撓性の平らなバンド部分58および遠位に位置した平らなバンド部分60を備える。上部のネジ外延34および下部のネジ外延36の可撓性により、曲がった伸長本体部分14を通る、ネジ外延34および36の移動が可能となる。各バンド部分58の近位末端は、ネジ32の横行スロット54内のネジ外延34および36の近位末端を固定するためのピン64を受容するように寸法決めされた穴62を備える。あるいは、他の固定技術(例えば、溶接、圧接など)を使用して、各バンド部分58をネジ32に固定し得る。各ネジ外延34および36の遠位に配置されたバンド部分60は、アンビル保持具38の近位末端において形成された横行スロット66内に受容されて(図10)、ネジ外延34および36の遠位末端にアンビル保持具38を固定するように、寸法決めされる。好ましくは、バンド部分60は、スロット66内に蝋付けまたは溶接される。あるいは、他の固定技術(ネジ、圧接などを含む)が使用され得る。アンビル保持具38の遠位末端は、複数の可撓性レッグ70を備え、これらは、以下にさらに詳細に考察されるように、アンビルアセンブリを受容および係合するために、外側に向けて曲がるように構成される。
【0020】
操作において、接近ノブ22が手動で回転される場合、回転可能なスリーブ33は、ネジ32の近位末端の周りで回転して、ピン52を、ネジ32の螺旋状チャネル50に沿って動かす。スリーブ33は、静止ハンドル18に軸方向に固定されるので、ピン52がチャネル50を通って移動する場合、ネジ32は、静止ハンドル18内で進められるかまたは引っ込められる。結果として、上部ネジ外延34および下部ネジ外延36(これらは、ネジ32の遠位末端に固定されている)ならびにアンビルインジケーター38(これは、ネジ外延34および36の遠位末端に固定されている)は、伸長本体部分14内を軸方向に移動する。アンビルアセンブリ30は、アンビル保持具38の遠位末端に固定されるので、接近ノブ22の回転は、空間の開いた位置と接近した位置との間での、シェルアセンブリ31に関するアンビルアセンブリ30の移動をもたらす。
【0021】
(発射機構)
図7〜9を参照して、発射機構は、発射トリガー20、発射リンク72および伸長プッシャーリンク74を備える。発射トリガー20は、本体部分76およびトリガーカバー80を備える。好ましくはネオプレンまたはゴムによって形成されたクッション性グリップ表面82が、トリガーカバー80上に提供される。クッション性グリップ表面19は、滑らないクッション性表面を提供して、デバイス10の作動を、外科医にとってより快適なものにする。トリガー20の本体部分76は、旋回部材84によって、プッシャーリンク74の近位末端に固定された連結部材86に旋回可能に接続される。連結部材86は、プッシャーリンク74と一体形成され得るか、またはプッシャーリンク74に固定された別個の要素として形成され得る。発射リンク72は、旋回部材87によってトリガー20の本体部分76に旋回可能に固定された第一末端、および旋回部材79によって、静止ハンドル18の静止ハンドルの半分区画18aおよび18bとの間に形成された垂直スロット82内に旋回可能に固定された第二末端を有する。旋回部材79は、スロット82内を垂直に移動するように、フリーである。バネ82aは、ハンドル18内に支持されて、スロット82の底に向けて下側へ、旋回部材79を推進する。本体部分76は、アバットメント89およびアバットメント91を含む1対のアバットメントをさらに備え、これらは、デバイス10が接近する前およびデバイス10が発射した後に、トリガー20の作動を防止するために、以下により詳細に記載される様式で、トリガーロック26の遠位末端に係合するように位置づけられる。突出部93はまた、発射トリガー20の本体部分76上に形成され、そして以下に記載されるように、外科用ステープルデバイス10の発射ロックアウト機構のトリガーロック戻し機構を起動するように構成される。
【0022】
伸長したプッシャーリンク74の近位末端上に支持される連結部材86は、フランジ104を備える(図9)。静止ハンドル18内の内壁またはアバットメントとフランジ104との間に位置付けられたバネ106は、引っ込められた非発射位置に対して近位のプッシャーリンク74を偏らせる。1対のウイング108は、連結部材86から外側に放射状に伸びる。ウイング108は、静止ハンドル18の内壁に沿って形成されたスロット111(図8)に沿ってスライドして、デバイス10の発射の間に静止ハンドル18内でプッシャーリンク74の適切な配置を維持するように寸法決めされる。
【0023】
プッシャーリンク74の遠位末端は、1対の係合フィンガー110を備え、これらは、プッシャーバック186の近位末端において形成される部材220とロッキングして係合するように寸法決めされる。プッシャーバック186は、シェルアセンブリ31の一部を形成し、そして以下でより詳細に考察される。プッシャーリンク74は、好ましくは、可撓性プラスチック材料から形成され、そして複数のノッチ187を備え得、これらのノッチにより、このプッシャーリンクは、本体14を通って移動する場合に、より容易に屈曲することが可能である。プッシャーリンク74は、接近機構をスライド可能に受容するための中空チャネル75を規定する。平らな表面またはカットアウト74aは、ネジ外延34および36をスライド可能に支持する。スペーサー77は、カットアウト74aに隣接する外側チューブ14a内に配置されて、ネジ外延34および36ならびにプッシャーリンク74についてのさらなる支持を提供して、このような構成要素が起動の間に留め付けられるのを防止する。輪状チャネル74bは、O−リングシール74cを受容するように、プッシャーリンク74の周りに形成される。プッシャーリンク74は、本体部分14内にスライド可能に位置付けられ、その結果、O−リング74cは、プッシャーリンク74と本体部分14の内壁との間の空間をシールする。このデバイスの発射機構の作動は、以下により詳細に記載される。
【0024】
図9Aは、本発明の開示される外科用ステープルデバイスの発射機構の好ましい実施形態を図示する。図9Aにおいて、プッシャーリンク74’は、プッシャーリンクを作製する材料の量を減少し、なおプッシャーリンクの曲げモーメント、従って発射機構を作動させるために必要とされる力を減少させるように改変される。また、図9B〜9Eを参照して、プッシャーリンク74’は、上側平坦部74a’および下側平坦部74b’、ならびに遠位管状端部セクション74f’および近位管状端部セクション74e’を有する曲線状の本体部分を備える。スロット74c’は、上側平坦部74a’内に形成され、そしてインジケーターリンクまたはワイヤを受容するような寸法であり、これは、以下にさらに詳細に記載される。上側平坦部74a’は、ネジ伸長部34および36をスライド可能に支持する寸法である。スペーサー77(上で考察される通り)は、ネジ伸長部34および36に接するように、上側平坦部74a’に隣接して配置される(図9L)。プッシャーリンク74’は、一対の側壁74d’を備え、これらの側壁は、ネジ伸長部34および36を制限する。図9Dに示されるように、好ましくは、側壁74d’は、上側平坦部74a’の長さに延び、そしてプッシャーリンク74’の管状端部セクション74e’および74f’と連絡する。側壁74d’は、外側チューブ14aの中心線の上および下において、プッシャーリンクの一部におけるプッシャーリンク74’に沿って及ぼされる圧縮力をその一部に対してバランスをとるかまたは等しくするために、圧縮力を運ぶ。
【0025】
発射トリガー20が作動される(すなわち、旋回部材84の周りで旋回する)場合、発射リンク72は、旋回部材79がネジストップ306上に形成されるアバットメント表面307(図11A〜D)と係合するまで、近位に移動する。その後、発射トリガー20は、バネ106の付勢に対して遠位にプッシャーリンク74または74’を進めるように、遠位に押される。プッシャーリンク74または74’の遠位端がプッシャーバック186に接続されるので、発射トリガー20の作動は、シェルアセンブリ31内のプッシャーバック186の進行をもたらして、以下に記載される様式で、シェルアセンブリ31からステープルを排出する。
【0026】
(アンビルアセンブリ)
図15〜16Aを参照して、アンビルアセンブリ30は、アンビルヘッドアセンブリ120およびアンビルセンターロッドアセンブリ152を備える。アンビルヘッドアセンブリ120は、ポスト122、アンビルヘッド124、バックアッププレート126、切断リング128およびアンビル129を備える。アンビルヘッド124は、内側管状レセス134および外側管状レセス136を備える。ポスト122は、アンビルヘッド124の内側管状レセス134内の中心に配置される。アンビル129は、管状レセス136内のアンビルヘッド124上に支持され、そしてステープルを受容しそして変形させるための複数のポケット140を備える。バックアッププレート126は、中心開口126bを備え、この中心開口は、ポスト122と管状レセス136との間に規定されるレセス134内のポスト122の周りに配置される。バックアップリング126は、高くなったプラットフォーム126aを備える。切断環128は、プラットフォーム126aと実質的に同じ構成を有する開口128aを備える。開口128aは、プラットフォームの周りに配置されて、バックアップリング126上に切断環128aを回転可能に固定する。好ましくは、切断環128は、ポリエチレンから形成され、そして例えば、接着剤を使用してバックアッププレート126に固定的に固定される。バックアップ環126は、好ましくは、金属から形成される。あるいは、構築のための他の材料は、プレート126および環128を構築するために使用され得る。切断環126およびバックアッププレート148は、ポスト122の周りにスライド可能に取り付けられる。バックアッププレート126は、一対の内向きに伸長するタブ150を備え、これは、以下にさらに詳細に記載される。
【0027】
アンビルセンターロッドアセンブリ152は、アンビルセンターロッド154、プランジャー156およびプランジャーバネ158を備える。センターロッド154の第1端部は、横方向スルーボア160を備え、このスルーボアは、センターロッド154の中心長手方向軸で半径方向に間隔をあけて配置される。アンビルヘッドアセンブリ120のポスト122はまた、横方向スルーボア162を備える。旋回部材164は、センターロッド154にポスト122を旋回可能に固定して、その結果、アンビルヘッドアセンブリ120が、アンビル中心ヘッドアセンブリ152に旋回可能に取り付けられる。プランジャー156は、センターロッド154の第1端部に形成されるボア154b(図16A)にスライド可能に配置される。プランジャー156は、係合フィンガー168を備え、この係合フィンガーは、アンビルヘッドアセンブリ120の旋回軸からずれており、そしてプランジャーバネ158によるポスト122の基部122aとの係合へと付勢されて、アンビルヘッドアセンブリ120を旋回位置へと押しやる。好ましい位置において、バックアッププレート126に形成されるタブ150は、センターロッド154の上面154a(図16B)を係合して、アンビルヘッドアセンブリ120が旋回部材164の周りで旋回することを妨げる。デバイス10が発射される場合、バックアッププレート126および切断環128は、以下にさらに詳細に記載されるような様式で、ナイフ188(図9)によってポスト122(図16B)の周りのアンビルヘッド124のアンビルレセス134へとより深く移動して、タブ150をセンターロッドア154の上面154aとの係合から離れて移動して、プランジャー156が、専科部材164の周りでアンビルヘッドアセンブリ120を旋回させ得る。
【0028】
センターロッド154の第2端部は、ブラインドボア170(図15B)を備え、このブラインドボアは、内向きにテーパー状の開口170aおよび間隔をあけて配置された管状レセス170bを備える。ブラインドボア170は、除去可能なトロカール157(図15C)を受容するような寸法である。管状レセスは、ブラインドボア170内に配置され、そしてトロカール(図示せず)に形成される管状リブを受容して、トロカールと係合してセンターロッド154を固定するような寸法である。あるいは、トロカール157は、縫合糸157aのみを使用してセンターロッド154内に保持され得る(すなわち、摩擦接触は、トロカール157とセンターロッド154との間に提供される)。これによって、センターロッド154からトロカール157を容易に除去し得る(図15C)。センターロッド154の外側表面は、管状レセス177を規定する管状アバットメント175を備える。管状レセス177は、アンビル保持具38のレッグ70と係合して、アンビルアセンブリ30をアンビル保持具38に解除可能に固定する寸法であれる。ボア179は、センターロッド154を通って横方向に伸長し、そしてトロカールをセンターロッドに固定するための縫合糸を受容するような寸法である。複数のスプライン181aを備えるカラー181は、センターロッド154の周りに固定される。スプライン181aは、アンビルおよびシェルアセンブリを接近させる間、アンビルアセンブリ30をシェルアセンブリ31と整列させるように機能する。
【0029】
(シェルアセンブリ)
図9を参照して、シェルアセンブリ31は、シェル182、プッシャーバック186、円筒形ナイフ188、およびステープルガイド192を備える。シェル182は、外側ハウジング部分194および内側ガイド部分196を備える。外側ハウジング部分194は、遠位円筒形セクション200、中心円錐セクション202および近位小直径円筒形セクション204を有するスルーボア198を規定する。複数の開口206が、円錐セクション202に形成される。開口206は、このデバイスの操作の間、流体および組織の通過を可能にするような寸法である。一対の直径方向で対向する可撓性係合部材207は、シェル182の近位円筒形セクション204上に形成される。係合部材207は、細長本体14の遠位端上に形成される開口209に受容されるように位置づけられて、シェル182を細長本体14に固定する。一対の開口211は、外側チューブ14aの近位端内に形成される。開口211は、固定ハンドル18の内壁に形成される突出部(図示せず)を受容するような寸法であり、ハンドル部分12へのチューブ14aの装着を容易にする。
【0030】
プッシャーバック186は、シェル182の内側ガイド部分196の周りにスライド可能に配置される中心スルーボア208を備える。プッシャーバック186は、遠位円筒形セクション210を備え、この遠位円筒形セクションは、シェル182の遠位円筒形セクション200、中心円錐セクション212および近位小直径円筒形セクション214内でスライド可能に位置づけられる。プッシャーバック186の近位端は、部材220を備え、この部材220は、プッシャーリンク74の弾性フィンガー110とロックして係合するように構成されて、プッシャーリンク74をプッシャーバック186へと締め付けて、その結果、プッシャーリンク74の遠位面が、プッシャーバック186の近位面に接する。
【0031】
プッシャーバック186の遠位端は、プッシャー190を規定する。プッシャー190は、ステープルガイド192に形成されるスロット228内にスライド可能に受容されて、ステープル230をそこから排出するような寸法にされた、様々な遠位伸長フィンガー226を備える。円筒形ナイフ188は、プッシャーバック186の中心スルーボア内に摩擦的に保持されて、プッシャー190に関してナイフ188を固定的に固定する。あるいは、ナイフ188は、接着剤、圧着、ピンなどを使用して、プッシャーバック186内に保持され得る。ナイフ188の遠位端は、円形切断縁部234を備える。
【0032】
操作において、プッシャーリンク74が、発射トリガー20の作動に応答して遠位方向に進められる場合、以下に記載されるように、プッシャーバック186は、シェル182内を遠位方向に進む。プッシャーバック186の進行は、ステープルガイド192のスロット228を通してフィンガー226を進めて、スロット228内に配置されるステープル230を進め、そしてステープルガイド192からステープル230を排出する。ナイフ188がプッシャーバック186に固定されるので、ナイフ188はまた、遠位に、コア組織へと進められ、これは、以下にさらに詳細に記載される。
【0033】
(カム調節機構)
図11〜13を参照して、カム調節部材400は、側壁306aに形成されるレセス306b内で、ネジストップ306の側壁306a上に固定ネジ312によって固定される。カム調節部材400は、スルーボア404を有する円形ディスク402を備える。スルーボア404は、スルーディスク402を通って偏心的に形成され、そして固定ネジ312を受容するような寸法である。より小さなノッチまたはホール406もまた、ディスク402に形成される。ノッチ406は、調節ツール(図示せず)の先端を受容するような寸法である。レセス306b(図11A)は、前ショルダーおよび後ろショルダーまたはアバット表面306cおよび306dをそれぞれ備え、そしてディスク402の外側縁部が前ショルダーおよび後ろショルダー306cおよび306dに接するように、ディスク402を受容する寸法である。
【0034】
上で考察されるように、固定ネジ312は、ディスク402およびネジストップ306を通って伸長し、そしてネジ32を係合して、ネジ32上の軸方向に固定された位置でネジストップ306を固定する。カム調節部材400は、ネジ32上のネジストップ306の軸方向位置を調節するように機能する。より詳細には、固定ネジ312は、ディスク402がネジストップ306のレセス306b内で回転し得るようにゆるめられ得ながら、一方、ネジ32に対して軸方向に固定されたままである。ディスク402がネジ32の周りに偏心的に取り付けられ、レセス306bの前ショルダーおよび後ろショルダー306cおよび306dと係合するので、固定された固定ネジ312の周りでのディスク402の回転は、ネジストップ306をネジ32に沿って軸方向に押しやって、ネジ32上のネジストップ306の軸方向位置を調節する。例えば、ディスク402が矢印「A」によって同定される時計回り方向(図11Dで見える)で回転する場合、ネジストップ306は、ディスク402の外側縁部とレセス306bの後ろショルダー306dとの間の係合に応答して、矢印「B」によって示される方向に、ネジ32に対して、軸方向に移動する。逆に、ディスク402が矢印「C」によって同定される反時計回り方向(図11Cで見える)で回転する場合、ネジストップ306は、ディスク402の外側縁部とレセス306bの前ショルダー306cとの間の係合に応答して、矢印「D」によって示される方向に、ネジ32に関して、軸方向に移動する。
【0035】
ステープルデバイス10が十分に近い位置にある(すなわち、アンビルアセンブリ30およびシェルアセンブリ31が並列に整列されて、組織受容クリアランスを規定する)場合、ネジストップ306は、回転可能スリーブ33の本体部分42に接する。この位置において、アンビルアセンブリ30およびシェルアセンブリ31は、わずかに間隔をあけて配置されて、組織受容クリアランスを規定する。カム調節部材400を提供することによって、組織受容クリアランスは、ネジ32上のネジストップ306の位置を、所望の範囲内に調節することによって選択的に調節され得る。好ましくは、カム調節部材400は、±0.45インチの組織受容クリアランスの調節を可能にするが、より大きなまたはより小さな調節能力もまた想定される。代表的には、組織受容クリアランスの調節は、デバイス製造業者によってなされる。穴(ボア)または開口部(図示せず)は、ハンドル部分12(図1)に提供されて、カム調節部材400へのアクセスを提供し得る。
【0036】
(収縮可能トロカールアセンブリ)
図9および10を参照して、ステープルデバイス10は、アンビル保持具38内にスライド可能に配置される、収縮可能トロカールアセンブリを備える。この収縮可能トロカールアセンブリは、トロカールアセンブリ240および係合部材242を備える。係合部材242は、示されるように、バネクリップの形態であり得る。あるいは、他の係合部材(例えば、バネ装填突出など)が想定される。トロカールアセンブリ240は、トロカール本体240aおよびトロカール先端240bを備える。トロカール本体240aは、トロカール本体240aを通って、その長さの一部に沿って伸長するスロット244を有する。スロット244は、係合部材242を受容するような寸法である。トロカール先端240bは、例えば、ネジ山を使用して、トロカール本体240aに固定される。あるいは、他の締め付け技術を使用して、トロカール先端240bをトロカール本体240aに固定し得る。トロカール先端240aが丸いかまたは鈍く示されるが、他の先端構成が想定される。トロカール先端240bは、トロカールが組織をアンビル保持具38の上で傾けるために組織を通して押される場合、変形する(すなわち、真っ直ぐになる)一対の弾性レッグ240cを備える。レッグ240cを提供することによって、組織は、使用の間、アンビル保持具38上に捕捉される可能性が少ない。
【0037】
図10に示されるように、係合部材242は、近位本体部分246および一対の遠位に伸長する弾性レッグ248を備える。各レッグ248は、テーパー状の先端250および近位に面するショルダー252を備える。ピン254は、それぞれ、部材242の本体部分246およびトロカール240に形成される開口256および258を通して配置されて、トロカール240のスロット244内の係合部材242を固定する。ピン254はまた、アンビル保持具38内に形成される細長スロット255を通って伸長し、その結果、スロット255の遠位表面および近位表面は、ストップとして機能して、収縮可能トロカールアセンブリの完全に進んだ位置および完全に収縮した位置を規定する。レッグ248は、弾性材料(例えば、バネ鋼)から形成される。あるいは、プラスチックを含む他の材料を使用して、係合部材242を形成し得る。非付勢位置において、部材242のレッグ248は、トロカール240のスロット244から外向きにそしてアンビル保持具38の外径を超えて伸長し、その結果、トロカール240の完全に進んだ位置において、レッグ248のショルダー252は、アンビル保持具38の遠位端38aを係合して、トロカール240を進んだ位置で保持する。図19Hおよび図20Gを参照のこと。
【0038】
図20G〜20Kを参照して、アンビルアセンブリ30がアンビル保持具38に装着される場合、アンビルアセンブリ30のアンビルセンターロッド154は、係合部材242のレッグ248のテーパー状先端250の上で、図20Gの矢印「Z」によって示される方向でスライドして、スロット244(図10)の制限へと内向きにレッグ248(図20H)を圧縮し、その結果、トロカール240および部材242は、センターロッド154のブラインドボア170に内側に移動する。アンビルアセンブリ30は、トロカール240の周りで押されるので、トロカール240は、アンビル保持具38内でその伸長位置からその収縮位置へと移動する。図示されるように、ピン254は、スロット255の第1端部255aからスロット255の第2端部255bへと移動する。
【0039】
アンビルアセンブリが、アンビル保持具38から離れる方向にアンビルアセンブリを引くことによって、アンビル保持具38から外される場合、部材242のレッグ248は、外向きに曲がって、部材242のレッグ248のショルダー252を、センターロッド154の管状レセス170bへと移動させる(図20Kを参照のこと)。結果として、アンビルアセンブリ30は、アンビル保持具38から外される場合、係合部材242、従ってトロカール240が、進んだ位置へとトロカール240を移動させるように遠位に引かれる。上で考察されるように、進んだ位置において、係合部材242のショルダー252は、アンビル保持具38の遠位面38aと係合する。
【0040】
トロカール240の近位端は、横方向スロット241(図10)を備える。剛性の可撓性インジケーターリンクまたはワイヤ243は、トロカール240のスロット241内で固定され、そしてプッシャーリンク74のスロット74c(図9)内で細長本体部分14を通って後方に、そしてネジ32のスロット32a(図12)に沿ってステープルデバイス10のハンドル部分12へと延びる。ワイヤ243が、ハンドル部分12内のインジケーターアセンブリに固定される近位端を有し、これは、以下に詳細に考察される。
【0041】
(ロックアウトチューブアセンブリ)
図9および図10に再び戻って、円筒形ロックアウトチューブ270が、アンビル保持具38の外面の周りにスライド可能に位置づけられ、そしてシェル182の内側ガイド部分196およびプッシャーバック186の中心ボア208を通って伸長するように位置づけられる。ロックアウトチューブ270の近位端は、管状フランジ272を備える。円筒形フィッティング273は、プッシャーバック186のボア208の近位端においてロックアウトチューブ270の近位端の周りに固定される。付勢部材187は、フランジ272と係合し、そしてロックアウトチューブ270を、フランジ272がフィッティング273と係合する位置へと遠位に押しやる(図20D)。付勢部材187は、好ましくは、ロックアウトチューブ270のフランジ272とプッシャーリンク74内に形成されるアバットメントとの間で圧縮して位置づけられるねじれバネ(torsion spring)である。
【0042】
ロックアウトチューブ270は、アンビル保持具38の可撓性レッグ70の周りに配置されて、アンビルアセンブリおよびカートリッジアセンブリが近付く間、レッグ70に剛性を提供する。最初に、近付く前に、アンビル保持具38のレッグ70は、ロックアウトチューブ270から突出する。従って、レッグ70は、自由に外向きに曲がって、アンビル保持具38へのアンビルアセンブリ30の装着および脱着を可能にする。近付く間、レッグ70は、アンビルのセンターロッド154の周りでレッグ70をクランプ留めするためにロックアウトチューブ270に引き込まれ、そしてアンビル保持具からアンビルアセンブリが除かれるのを妨げる。アンビル保持具38は、アンビル保持具38のショルダー38bがロックアウトチューブ270の遠位面270aと係合するまで、近付く間、ロックアウトチューブ270に引き込まれる。その後、アンビル保持具38およびロックアウトチューブ270の両方が、プッシャーバック186のボア208内にバネ187の付勢に対して収縮する。
【0043】
(インジケーターアセンブリ)
図7、8、および11〜13を参照して、インジケーターアセンブリは、固定ハンドル18内に取り付けられ、そしてその上に形成される係合部材501および印(indicia)(「図示せず)を有するインジケータープレート500を備える。印は、好ましくは、着色ドットの形態であり、これは、デバイス10が発射準備状態であるか否かを同定する。例えば、緑色ドットは、発射準備位置を示し得、そして赤色ドットは、発射準備位置にないことを示し得る。あるいは、他の形態の印が使用され得、これには、グラフィック印、書かれた印または数字の印が挙げられる。インジケータープレート500は、固定ハンドル18内にスライド可能に配置され、その結果、その印は、インジケーター開口24を通して見ることができる。付勢部材502、好ましくは、コイルバネは、一端において固定ハンドル18の内壁に固定され、そして他端において、インジケータープレート500に固定される。付勢部材502は、張力下で配置されて、インジケータープレート500を、固定ハンドル18内のその最も前の位置に押しやる。
【0044】
保持具スライド506は、ネジストップ306に形成される一対の溝508内にスライド可能に配置され、そして第1アバットメント表面509および第2アバットメント表面510を備える。実質的に剛性のインジケーターリンクまたはワイヤ243は、トロカール本体240aの近位端(図10)から伸長し、そして固定ネジ512によって保持具スライド506に接続される。あるいは、他の締め付け技術が使用され得る。ワイヤ243は、アンビルアセンブリがアンビル保持具38に装着される場合、トロカールアセンブリ240の直線運動を保持具スライド506の直線運動に変換する。従って、アンビルアセンブリ30がアンビル保持具38に装着されて、その進んだ位置からその収縮した位置へとトロカール240を移動させる場合、ワイヤ243は、ネジストップ306(図12)上のその最も前の位置からその最も後ろの位置への保持スライド506の移動をもたらす。
【0045】
上で考察されるように、ネジストップ306は、固定ネジ312によってネジ32に固定される。近付けノブ22がスリーブ30へネジ32を収縮するように回転する場合、ネジストップ306は、スリーブ30へと収縮する。アンビルアセンブリ30がアンビル保持具38に装着され、そしてネジ32が所定の距離収縮した後、第1アバットメント表面509は、インジケータープレート500の係合部材501に接し、その結果、付勢部材502をその最も後ろの位置に押しやることに対して、インジケータープレート500をさらに近くに移動させる。その最も後ろの位置において、プレート500のこの印は、開口24を通して見ることができ、そしてデバイス10が発射準備状態であることを同定する。
【0046】
デバイス10がアンビル保持具38に装着されるアンビルアセンブリ30なしで近付く場合、保持具スライド506は、ネジストップ306上のその最も前の位置のままであり、リテーナースライド506のアバットメント表面509は、デバイスが近付く間、インジケータープレート500の係合部材501と接触する位置になく、そしてインジケーターアセンブルは、発射準備位置にないままであり、そして例えば、開口24を通して示される。
【0047】
(発射ロックアウトアセンブリ)
図8、図14、図17および図18を参照して、トリガーロック26(図1および8)、安全ブラケット520、ロックアウトスリーブ522および圧縮部材523を備える、発射ロックアウトアセンブリが提供される。安全ブラケット520は、前カラー部分524、細長スロット528を有する本体部分526および後ろC型部分530を備える。前カラー部分524は、回転可能スリーブ30の本体部分42の前に隣接して、ネジ32の近位端の周りに配置される。圧縮部材523は、複数のフィン532を備え、これらのフィンは、管状チャネル534を部分的に規定する。C型部分530は、圧縮部材523の管状チャネル534内に配置される。付勢部材536(好ましくは、コイルバネ)は、圧縮部材523の後ろの固定ハンドル18に配置されて、圧縮部材523および安全ブラケット520を、固定ハンドル18内で前に押しやる。
【0048】
トリガーロック26(図8)は、旋回部材540の周りでハンドルセクション18aと18bとの間に旋回可能に支持され、そして旋回部材540に隣接して配置される、一体的に形成されたロッキング部分542を備える。デバイス10が近い位置でない場合、安全ブラケット520の本体部分526は、トリガーロック26のロッキング部分542に隣接するかまたは並置されて位置づけられて、トリガーロック26が、旋回部材540の周りで、そのロッキング位置から旋回することを妨げる(図1)。
【0049】
デバイス10が近付く場合、保持スライド506(図11)は、ネジストップ306とともに、第2アバットメント表面510が安全ブラケット520の前カラー部分524と係合する位置へと移動して、安全ブラケット520を後方に移動させる。安全ブラケット520の後ろ位置において、細長スロット528は、トリガーロック26のロッキング部分542と整列して、トリガーロック26がトリガー20から離れて固定ハンドル18に向かって旋回し得、発射トリガー20の作動を可能にする。
【0050】
アンビルがデバイス10に装着されず、そして保持スライド506がネジストップ306上のその最も前の位置ある場合、第2アバットメント表面510が安全ブラケット520の前カラー部分524と係合する位置なく、ロッキング部分542が、安全ブラケット520の本体526と接し、そしてトリガーロック26がロックが外される位置に旋回しない。
【0051】
ロックアウトスリーブ522は、円筒形部分550、半円筒形本体部分552および前伸長アーム554を備える。可撓性タブ556は、アーム554から下向きに伸長し、そして保持表面556aを備える。駆動部材558がタブ556の一端から下向きに延びる。ロックアウトスリーブ522は、回転可能スリーブ33の周りに配置される。付勢部材560(好ましくは、ねじれネジである)は、ロックアウトスリーブ522を固定ハンドル18内で後方に押しやるように配置される。ロックアウトスリーブ522はまた、側部フィン563を備え、これは、固定ハンドル18内で溝内に受容されて、ロックアウトスリーブ522を直線運動に制限する。
【0052】
ロックアウトスリーブ522が、ステーショナリーハンドル18内に位置づけられる場合、バイアス(biasing)部材560は、回転スリーブ33の本体部分42とロックアウトスリーブ522の円柱状部分550との間で圧縮される。可撓性タブ556の固定表面556aは、表面562をステーショナリーハンドル18内に係合するように位置付けられ(図19C)、その結果、バイアス部材560は、圧縮されて維持される。
【0053】
操作の際、フィンガートリガー20が作動される場合、トリガーアクチュエーター20上に形成された突出部93(図1)は、ドライブ部材558と係合するように移動して、ステーショナリーハンドル18内の表面562から、タブ556の固定表面556aを解放する。これが生じると、スプリング560は、ロックアウトスリーブ522を後方へと動かし、その結果、スリーブ522の一部は、トリガーロック26のロッキング部分542を係合して、トリガーロック26を、ロック解除位置からロック位置へと旋回させる。この発射後のロック位置において、トリガーロック26の遠位端は、アバットメント89とアバットメント91との間の位置に戻って、再び、デバイス10の不慮の発射を防止する。
【0054】
(触覚指標)
図8、8A、8B、および11を参照すると、触覚インジケーター580は、ステーショナリーハンドル18内に位置付けられ、そして収縮位置と伸長位置との間の垂直方向スロット582内に移動可能である。触覚インジケーター580は、隆起部580aを備え、この隆起部580aは、スロット582に形成された2つの凹部582aおよび582bの1つの中に受容されるように構成される。伸長位置において、触覚インジケーター580は、チルトアンビルアセンブリを傾けるのに十分な細長体部分離れた位置(position of unapproximation)で、ネジストップ306上に形成されたウィング584を係合するように位置付けられる。デバイス10を発射する前に、触覚インジケーター580は、凹部582a内に位置付けられた隆起部580aと共に収縮位置にある。デバイス10が発射される場合、発射リンク72上に形成されたアバットメント表面588(図8)は、インジケーター580を係合して、インジケーター580を伸長位置に動かし、その結果、隆起部580aは、凹部582a内に位置付けられる。デバイス10が、アンビルヘッドを旋回させるのに十分な距離に離れている場合、ネジストップ306のウィング584は、インジケーター580を係合して、このような離れた地点に到達したという、可聴指標および/または触覚指標を提供する。その後、外科医は、患者からこのデバイスを取り出し得る。アンビル保持具からアンビルアセンブリを取り出すために、これが患者から取り出された後、外科医は、伸長位置から収縮位置に触覚インジケーター580を進めるのに十分な力を接近ノブ22にさらに提供することにとり、このデバイスをさらに接近させない必要がある。
【0055】
外科用ステープルデバイス10の操作は、本明細書において、図19〜24Fを参照して詳細に記載される。
【0056】
図19〜19Hは、アンビル保持具38へのアンビルアセンブリ30(図1)の取付けの前の、細長体部分離れた位置または開放位置にある外科用ステープルデバイス10を示す。この位置において、ネジストップ306は、カップリング86に隣接して位置づけられ、このカップリング86は、プッシャーリンク74の近位端に固定され、そして保持具スライド506は、ネジストップ306上の最も前方の位置に位置付けられる。プッシャーリンク74は、スプリング106により、収縮位置まで進められる。発射ロックアウトアセンブリのセイフティーブラケット520の本体部分526は、スプリング560により、トリガーロック26の旋回を防ぐ位置まで進められる。図19Cを参照のこと。発射リンク72に固定されたピボット部材79は、バイアス部材82a(図19E)により、垂直方向スロット82の基部に位置付けられる。触覚インジケーター580は、移動止め582a内に位置づけられる隆起部580aと共に収縮位置にある。
【0057】
図19Dおよび図19Hを参照して、上で議論したように、アンビルアセンブリ30のアンビル保持具38への取付けの前に、トロカールアセンブリ240は、アンビル保持具38から外向きに延びるトロカールの先端部240bと共に伸長した位置にある。係合部材のレッグ248のショルダー252は、トロカールアセンブリ240を収縮した位置まで進められることを防ぐために、アンビル保持具38の遠位表面38aにほぼ対向している。
【0058】
図20〜20Fは、アンビル保持具38に固定され、かつ接近していない位置または開放位置にあるアンビルアセンブリ30を有する外科用ステープルデバイス10を示す。図20Dを参照して、アンビルアセンブリ30が、アンビル保持具38に取付けられる場合、アンビルセンターロッド154は、トロカール先端部240bの上に位置付けられ、そしてアンビル保持具38へと押される。このことが起きると、係合部材242のレッグ248は、内向きに圧縮されて、レッグ248のショルダー252を、アンビル保持具の遠位表面38aとの係合から解放する。このことは、アンビル保持具38の可撓性レッグ70の遠位端が、アンビルセンターロッド154の輪状凹部177内に受容されるまで、センターロッド154をアンビル保持具38へと挿入することを可能にする。このことが起きると、トロカールアセンブリ240は、アンビル保持具38中のスロット255の近位端に位置付けられたピン254と共に収縮位置まで、移動される。
【0059】
トロカールアセンブリが、収縮位置まで移動される場合、インジケーターリンクまたはワイヤ243(図11および12)は、保持具506を、ネジストップ306上の最も前方の位置から、最も後方の位置に移動する。最も後方の位置では、デバイス10の接近の際、保持具スライド506の第1のアバットメント表面509は、インジケータープレート500の部材501を係合し、そしてアバットメント表面510は、セイフティーブラケット520の前方のカラー部分524を係合する。デバイス10の残りの構成要素は、アンビルアセンブリ30のアンビル保持具38への取付けによる影響を受けない。
【0060】
図21〜21Gは、接近した位置においてアンビル保持具38に取付けられたアンビルアセンブリ30を有する外科用ステープルデバイス10を示す。上で議論したように、アンビルアセンブリ30は、回転ノブ22を回転することにより、図20に示される接近していない位置から、接近した位置に移動される。ノブ22の回転は、ネジ32の螺旋チャネル50内のピン52を回転する円柱状スリーブ33の回転を生じる。スリーブ33は、軸方向に固定されるので、螺旋チャネル50内のピン52の移動は、中空スリーブ33へのネジ32の直線的収縮を生じる。ネジ32の遠位端は、ネジエキステンション34および36に接続される。このネジエキステンション34および36は、遠位端で、アンビル保持具38に固定され、ネジ32のこのような直線的な移動は、アンビル保持具38およびアンビルアセンブリ30の直線的移動に変わる。
【0061】
ネジストップ306は、ネジ312を配置することにより、ネジ32に固定される。従って、デバイス10の接近の間に、ネジストップ306は、ハンドル18内の前方の位置(図20)から、ハンドル18内の後方の位置(図21)に移動される。ネジストップ306が、その最も前方の位置からその最も後方の位置に移動されるので、保持具スライド506上の第1のアバットメント部材509は、インジケータープレート500の部材501に係合され、そして保持具スライド506上のアバットメント部材510は、セイフティーブラケット520のカラー部分524を係合して、スプリング502のバイアスに対して、インジケータープレート500、およびスプリング536のバイアスに対して、セイフティーブラケット520をハンドル18内の後方へと移動させる。後方へのインジケータープレート500の移動は、インジケーター開口部24の下の発射準備完了の印に位置を合わせる。セイフティーブラケット520の後方への移動は、セイフティーブラケット520の本体526内の細長いスロット528を、トリガーロック26のロック位置542並べ、その結果、このトリガーロック26は、ロック解除位置へと自由に旋回する。
【0062】
ネジストップ306の最も後方の位置において、ネジストップ306の基部に形成され(図11A)、そして実質的に凹表面を備える、アバットメント表面307が、発射リンク72のピボット部材79を受容および係合するように位置付けられることもまた注目される。
【0063】
図22〜22Dは、発射トリガー20の発射工程(ストローク)の間の外科用ステープルデバイス10を示す。トリガー20が、ステーショナリーハンドル18に向かって圧縮される場合、ピボット部材79は、ネジストップ306上のアバットメント表面307を係合し、そして発射トリガー20が、遠位方向に押される。上で議論したように、発射トリガー22の遠位端は、カップリング部材86を介して、プッシャーリンク74の近位端に接続される。従って、発射トリガー20が、遠位方向に移動される場合、プッシャーリンク74は、遠位方向に移動されて、シェルアセンブリ31内のプッシャーバック186の前進をもたらす。プッシャーバック186のフィンガー190は、ステープル230を係合し、そしてステープルガイド192からステープル230を射出する。
【0064】
円柱状のナイフ188は、プッシャーバック186と同時に移動され、その結果、このナイフ188は、カッティングリング128とバックアッププレート126との係合部へと移動する。上で議論したように、カッティングリング128は、好ましくは、ポリエチレンから形成され、そしてバックアッププレート126は、好ましくは、金属から形成される。ナイフ188がカッティングリング128を係合する場合、ナイフ188は、カッティングリング128を切り開き、そしてプッシャーバックアッププレート126を、アンビルヘッド124へと深く押し込んで、センターロッド154の頂部表面154a(図16B)との係合部から、タブ150を移動させる。ここで、アンビルヘッド124は、部材164の周りを自由に旋回し、そしてプランジャー156により行われるように進められる(図24F)。アンビルアセンブリは、シェルアセンブリ31と並列して整列するので、このアンビルヘッド14は、このアンビルアセンブリおよびシェルアセンブリが、このアンビルヘッドを完全に旋回させるのに十分な距離に離れるまで、完全に旋回しないことが注目される。
【0065】
図22Cに示されるように、発射トリガー20上の突出部93は、ロックアウトスリーブ522のドライブ部材558と整列される。発射トリガー20が、完全に作動される場合、突出部93は、ドライブ部材588を、偏向タブ556に上向きに係合して、保持具表面556aを、ステーショナリーハンドル18の内壁の表面562から解放する。これが生じる場合、圧縮状態にあるスプリング560は、ハンドル18内のロックアウトスリーブ522を下向きに駆動し、その結果、スリーブ522の一部は、トリガーロック26のロック部分542を係合して、このトリガーロック26を、ロック解除位置(図22C)からロック位置(図23)へと旋回させる。ロック位置において、トリガーロック26の遠位端は、アバットメント89とアバットメント91との間に位置付けられる。
【0066】
発射トリガー20の作動中に、発射リンク72上のエキステンション589は、触覚インジケーター580を係合し、そして触覚インジケーター580を、収縮位置から伸長位置に移動する。伸長位置において、インジケーター580は、アンビルアセンブリおよびシェルアセンブリが離れる間に、ネジストップ306のウィング584を係合するように位置付けられる(図22F)。
【0067】
図22〜23Gは、発射トリガー20が、解放された後の、外科用ステープルデバイス10を示す。図示されるように、バイアス部材106は、プッシャーリンク74を、収縮位置の近くに進め、そしてトリガーロック26は、ロックアウトスリーブ522により、上で議論した様式でロック位置に移動される。図23Dに示されるように、プッシャーバック186は、プッシャーリンク74の移動に応答して、その収縮位置の近くまで移動される。アンビルヘッド124は、旋回を始めるが、シェルアセンブリ31によるさらなる旋回は防止される。
【0068】
図24〜24Hは、発射され、そして離れた後の、外科用ステープルデバイス10を示す。図示されるように、アンビルヘッド124は、プランジャー156により、旋回位置まで移動される(図24Eおよび24F)。ネジストップ306は、セイフティーブラケット520に隣接する最も後方の位置から、プッシャーリンク74の近位端に隣接する最も前方の位置まで進めされる。ネジストップ306上に保持される、保持具スライド506は、前方の位置にネジストップ306と共に移動される。保持具スライド506が前方に移動する場合、スプリング502は、インジケータープレート500を、最も前方の位置に戻し、そしてスプリング536は、セイフティーブラケット520を、最も前方の位置に戻す。このように、インジケータープレート500は、再度、デバイスを、発射準備が出来ていない状態として識別し、そしてセイフティーブラケット520は、トリガーロック520の移動を妨げる位置まで移動する。
【0069】
図24Gおよび24Hを参照して、ネジストップ306が、ステーショナリーハンドル18内の最も後方の位置(図23)から最も前方の位置に移動される。ネジストップ306のウィング584は、離れた地点で触覚インジケーター580を係合する。この地点で、アンビルヘッド124は旋回する(図24F)。ネジストップ306と触覚インジケーター580との間のこの接触は、外科医に、アンビルヘッド124が傾き、そしてデバイスが患者から取り出されるという、触覚指標および/または可聴指標を提供する。接近ノブ22に対してさらなる力を提供することにより、ネジストップ306のウィング584は、触覚インジケーター580を、その収縮位置に戻して、デバイス10を完全に離すことを可能にすることが注目される。
【0070】
図25〜29は、概して610として示される、本発明の開示される外科用ステープルデバイスの別の好ましい実施形態を示す。簡単には、外科用ステープルデバイス610は、近位ハンドル部分612、湾曲した細長い外部チューブ614aおよび遠位ヘッド部分616を備える細長い本体中央部分614を備える。
【0071】
ハンドル部分612は、ステーショナリーハンドル618、発射トリガーアセンブリ620、回転可能な接近ノブ622、およびインジケーターウィンドウ624を備える。ステーショナリーハンドル618は、好ましくは、熱可塑性樹脂(例えば、ポリカーボネート)ハンドルセクションから形成され、これは、共に、ハンドル部分612の内部構成要素のためのハウジングを規定する。これらの内部構成要素は、以下で詳細に議論される。ピボット式で取付けられたトリガーロック626は、ハンドル部分612に固定され、そしてステープルデバイス610の不慮の発射を防ぐように手動で位置決めされる。インジケーターウィンドウ624は、ステープルデバイスの多数の操作位置を識別する、内部に位置付けられたインジケーターを見ることを容易にする、開口部または半透明の表面628を定義する。
【0072】
ヘッド部分616は、アンビルアセンブリ630およびシェルアセンブリ631を備える。これらのアセンブリの各々は、以下で詳細に議論される。他で述べない限り、外科用デバイス610の構成要素は、ポリカーボネートを含む熱可塑性樹脂、およびステンレス鋼およびアルミニウムを含む金属から形成される。特定の構成要素を形成するように選択された特定の金属は、特定の構成要素の強度の要求に依存する。例えば、アンビルは、ステンレス鋼のような金属から形成され、そしてステーショナリーハンドルは、ポリカーボネートのような熱可塑性樹脂から形成される。あるいは、材料が外科用途に適切であり、そして特定の構成要素の強度の要求を満たす場合、上記に列挙されていない他の材料を用いて、ステープルデバイス610の構成要素を形成し得る。
【0073】
図30は、ハンドル部分612の内部構成要素を曝露するように取り外されたステーショナリーハンドル618のセクションと共に、外科用ステープルデバイス610のハンドル部分612を示す。ハンドル部分612は、インジケーター機構および接近機構および発射機構の近位の構成要素を収容する。これらの機構の各々は、本明細書中の以下に詳細に記載される。クッションノンスリップグリップ619は、ステーショナリーハンドル612に固定される。グリップ619は、ゴムまたはネオプレンから形成され得、そしてオーバーモールド(overmolding)プロセスを用いてステーショナリーハンドル18に固定される。あるいは、本明細書中で言及されていない他の材料および装着方法が用いられ得る。
【0074】
図30〜36を参照して、接近機構は、接近ノブ622、回転可能なスリーブ633、ネジ632、第1および第2のネジエキステンション、それぞれ、634および636、ならびにアンビル保持具638を備える(図34)。回転可能なスリーブ633は、小さな直径の円柱状の中空の本体部分640、および大きな直径の中空の本体部分642を備える。本体部分642は、ステーショナリーハンドル618の内壁上に形成された、内側方向に延びる輪状フランジ646を受容するような寸法の輪状の溝644を備える。溝644とフランジ646との間の係合は、ステーショナリーハンドル618内のスリーブ633を軸方向に固定するが、相対的な回転を許容する。回転可能なスリーブ633の本体部分640の近位端は、ステーショナリーハンドル618の近位端に形成された開口部を通じて延び、そして平坦な表面648を備える。接近ノブ622は、スリーブ633の近位端を受容するように構成された穿孔649を備え、その結果、ノブ622の回転は、同時に、スリーブ633の回転を生じる。
【0075】
ネジ632は、回転可能なスリーブ633内にスライド式に位置付けられる寸法にされる。螺旋チャネル650は、ネジ632の近位端に形成される。ピン652は、スリーブ633の本体部分642を通じて、螺旋チャネル650へと放射状に延びる。スリーブ633は、ステーショナリーハンドル618に対して軸方向に固定されるので、ネジ632の周りのスリーブ633の回転は、ピン652をネジ632のチャネル650に沿って動かして、ステーショナリーハンドル618内でのネジ632の軸方向の移動を生じる。
【0076】
ネジ632の遠位端は、頂部の平坦な表面および底部の平坦な表面ならびに通し穿孔(throughbore)656を有するエキステンション654を備える。頂部および底部のネジエキステンション634および636は、各々、可撓性フラットバンド部分658および遠位半円柱状部分660を備える。頂部および底部のネジエキステンション634および636の可撓性は、湾曲した細長い本体部分614を介する、ネジエキステンション634および636の移動を容易にする。各々のバンド部分658の近位端は、ネジエキステンション634および636の近位端を、通し穿孔656を介してネジ632のエキステンション654に固定するためのピン664を受容するような寸法の開口部662を備える。ネジエキステンション634および636の各々の半円柱状の部分660は、外向きに延びる突出部666を備える。頂部および底部のネジエキステンション634および636が、並列に整列して位置付けらる場合、ネジエキステンション634および636の半円筒状の部分660は、共に、アンビル保持具638の近位端内に受容されるような寸法である円柱状部材を規定する。突出部666は、アンビル保持具638をネジエキステンション634および636の遠位端に固定するために、アンビル保持具638の近位端に形成された開口部668に受容されるような寸法である。アンビル保持具638の遠位端は、複数の可撓性レッグ670を備え、このレッグ670は、以下でさらに詳細に議論されるように、アンビルアセンブリを受容および係合ために、外向きに収縮するように構成される。
【0077】
操作において、接近ノブ622が手動で回転される場合、回転可能なスリーブ633は、ネジ632の近位端の周りで回転されて、ピン652をネジ632のチャネル650に沿って動かす。スリーブ630が、ピン652がチャネル650を通じて動かせるように、ステーショナリーハンドル618に対して軸方向に固定されるので、ネジ632は、ステーショナリーハンドル618内に進められるかまたは収縮される。結果として、ネジ632の遠位端に固定される頂部および底部のネジエキステンション634および636、ならびにネジエキステンション634および636の遠位端に固定される、アンビル保持具638は、細長い本体部分614内で軸方向に移動される。アンビルアセンブリ630は、アンビル保持具638の遠位端に固定されるので、接近ノブ622の回転は、間隔をあけた位置と接近位置との間で、シェルアセンブリ631に関連したアンビルアセンブリ630の移動を生じる。
【0078】
図30〜35を再度参照して、発射機構は、発射トリガー620、発射リンク672、および細長いプッシャーリンク674を備える。発射トリガー620は、1対のトリガープレート676および678、トリガーカバー680、ならびにクッションを備えるグリップ部材682を備える。図39および40もまた参照のこと。グリップ部材682は、好ましくは、ゴムまたはネオプレンから形成され、そしてトリガーカバー680上にオーバーモールドされる。あるいは、他のクッションを備えるノンスリップグリップ材料が用いられ得、そして任意の公知の技術(例えば、接着剤)を用いてトリガーカバーに固定され得る。トリガープレート676および678の各々の遠位端は、それぞれ、ピボット部材684を受容するための穴を有する、ヒンジ部分676aおよび678aを備える。ピボット部材684は、ヒンジ部分676aと676bとの間で、プッシャーリンク674の近位端に固定されたコネクタ686中に形成された穿孔677を通って延びて、発射トリガー620の遠位端をプッシャーリンク674の近位端にピボット式で固定するような寸法にされる。あるいは、コネクタ686は、プッシャーリンク674と一体に形成され得る。各々のトリガープレート676および678の頂部表面は、デバイス610の不慮の発射を防ぐためのロッキングピン693を受容するような寸法のノッチ683を備える。
【0079】
発射リンク672は、スペーサー672cにより相互連結された右側リンク部分672aおよび左側リンク部分672bを備える(図31A)。各リンク部分は、その各々の末端にピボット開口部688、および中央に位置付けられた細長いスロット690を備える。リンク部分672aと672bとの間の空間は、セイフティーリンク692を受容するような寸法にされる。セイフティーリンク692の機能および操作は、以下に詳細に記載される。発射リンク672の一方の末端694は、ピボット部材696の周りの、トリガープレート676および678中の開口部679(図40)の間でピボット式に連結される。発射リンク672の他方の末端698は、ピボット部材700の周りのステーショナリーハンドル618にピボット式に連結される。ピボット部材700は、ステーショナリーハンドル618の内壁に沿って形成された垂直方向のポケット702(一方のみを示す)中に支持される。ピボット部材696および700は、ピン、発射リンク672上に形成された一体型のナブ、または所望の機能を提供する任意の他の構造として形成され得る。
【0080】
セイフティーリンク692は、本体部分の一方の末端に形成されたガイド部材692b、および本体部分の反対の末端に形成された穿孔692cを有する本体部分692aを備える。穿孔692cは、ロックピン693を受容するような寸法にされる。セイフティーリンク692は、発射リンク672の右側のリンク部分672aと左側のリンク部分672bとの間に位置付けられる。ロックピン693は、発射リンク672のスロット690中にスライド式に位置付けられ、そしてガイド部材692bは、ステーショナリーハンドル618の内壁に沿って形成された水平方向スロット695中にスライド式に位置付けられる。バイアス部材(例えば、コイルスプリング697)は、発射リンク672の末端694とセイフティーリンク692の中央部分との間に固定されて、
フランジリンク672の末端694に向かってセイフティーリンク692を偏らせる。発射リンクの本体部分692aは、弱い部分699を備える。弱い部分699の目的は、以下に詳細に記載される。
【0081】
細長いプッシャーリンク674は、その近位端の周りに、コネクタ686の遠位に位置付けられたフランジ704を備える。ステーショナリーハンドル618の前方末端とフランジ704との間に位置付けれた、スプリング706は、プッシャーリンク674を、収縮した発射しない位置に偏らせる。1対のウィング708は、プッシャーリンク674の近位端から外向きに放射状に延びる。ウィング708は、ステーショナリーハンドル618の内壁に沿って形成されたスロット710に沿ってスライドし、デバイス610の発射の間にステーショナリーハンドル618内のプッシャーリンク674の適切な整列を維持するような寸法にされる。プッシャーリンク674の遠位端は、1対の可撓性アーム710を備え、このアーム710は、プッシャーバック786の近位端に形成されたスロット820(図50)を通じて延びるような寸法にされる。プッシャーバック786は、シェルアセンブリ631の部分を形成し、そして以下でさらに詳細に議論される。プッシャーリンク674は、好ましくは、可撓性プラスチック材料から形成され、そして、本体614を通って移動する場合に、プッシャーリンクをより容易に曲げることを可能にする、複数のノッチ787を備える。輪状チャネル674aは、oリングシール674bを受容するように、プッシャーリンク674の周りに形成される。デバイスの発射機構の操作は、以下に詳細に記載される。
【0082】
上で議論されるように、ヘッド部分616は、アンビルアセンブリ630およびシェルアセンブリ631を備える。図41〜46を参照して、アンビルアセンブリ630は、アンビルヘッドアセンブリ720およびアンビルセンターロッドアセンブリ752を備える。アンビルヘッドアセンブリ720は、ポスト722、アンビルヘッド724、バックアッププレート726、カッティングリング728、およびアンビル729を備える。アンビルヘッド724は、ポスト722、内部輪状リング734、および外部輪状リング736を受容するような寸法の中央穴732を備える。アンビル729は、輪状リング734と736との間に規定された輪状チャネル738中のアンビルヘッド724上で支持される。アンビル729は、ステープルを受容および変形するための複数のポケット740を備える。アンビル729上に形成されたタブ742は、アンビルヘッド724中に形成されたスロット744中に受容されるような寸法にされ、アンビル729とアンビルヘッド724の適切な整列を維持する。カッティングリング724およびバックアッププレート726は、各々、中央開口部を備え、そして中央の穴732と輪状リング734との間に規定された輪状チャネル746中で重なった関係で、ポスト722の周りに位置付けられる。好ましくは、カッティングリング724は、ポリエチレンから形成され、そして例えば、接着剤を用いて、バックアッププレート726に固定される。カッティングリング724は、バックアッププレート726上に形成されたタブ750を受容するような寸法の1対の直径方向に対向するスロット748を備える。カッティングリング726およびバックアッププレート748アセンブリは、ポスト722の周りにスライド式に固定される。
【0083】
アンビルセンターロッドアセンブリ752は、アンビルセンターロッド754、プランジャー756およびプランジャースプリング758を備える。センターロッド754の第1の末端は、センターロッド754の中心の長手方向の軸から放射状に空間を空けられている、横軸方向の通し穿孔760を備える(図44)。アンビルヘッドアセンブリ720のポスト722もまた、横軸方向の通し穿孔762を備える。ピボット部材764は、ポスト722をセンターロッド754に対してピボット式に固定し、その結果、アンビルヘッドアセンブリ720は、アンビルセンターロッドアセンブリ752に対してピボット式に取り付けられる。図45および46において最もよく見られるように、プランジャー756は、センターロッド754の第1の末端中に形成された穿孔766中にスライド式に位置付けられる。プランジャー756は、係合フィンガー768を備え、この係合フィンガー768は、アンビルヘッドアセンブリ720の旋回軸からオフセットされ、そしてプランジャースプリング758によって、ポスト722の基部との係合部へと偏らされて、アンビルヘッドアセンブリ720を旋回位置へと進める。好ましい位置では、バックアッププレート726上に形成されたタブ750は、センターロッド754の頂部表面754aを係合して、アンビルヘッドアセンブリ720の旋回を防ぐ(図63および64を参照のこと)。デバイス610が発射される場合、バックアッププレート726およびカッティングリング728は、ナイフ788により、ポスト722の周りのアンビルヘッド724へとより深く移動され、センターロッド754の頂部表面754aとの係合から外れるようにタブ750を移動して、プランジャー756がピボット部材764の周りでアンビルヘッドアセンブリ720を旋回可能にする。図66〜68を参照のこと。図68に示されるように、センターロッド754の上部末端754bは、さらに、組織標本を収容するように角度を付けられる。このデバイスが発射された後に、アンビルは、アンビルアセンブリおよびシェルアセンブリが所定の距離に離れた後にのみ、傾いた位置に動くことが注目される。
【0084】
センターロッド754の第二末端は、ブラインドボア770を備える(図45および46)。ブラインドボア770は、内部方向にテーパー付けされた開口部772および空間が開けられた輪状レセス774を備える。ブラインドボア770は、取り外し可能なトロカール776を受容するような寸法にされる。輪状レセス774は、ブラインドボア770内に配置され、そしてトロカール776上に形成された輪状リブ778を受容するような寸法にされ、トロカール776との係合してセンターロッド754を固定する。このセンターロッド754の外部表面はまた、輪状アバットメント775を備える。輪状アバットメント775は、アンビル保持具638の遠位端に形成された輪状レセス777内に受容されるような寸法にされ、アンビル保持具638内でアンビルアセンブリ630を保持する。
【0085】
図34および50を参照すると、シェルアセンブリ631は、シェル782、スリーブ784、プッシャーバック786、円筒形ナイフ788、プッシャー790およびステープルガイド792を備える。シェル782は、外部ハウジング部分794および内部ガイド部分796を備える。スリーブ784は、シェル796の内部ガイド部分782内に固定的に配置され、そしてステップボア785を規定する。移動止め789(図34A)を有するロック部材787は、ステップボア785内に保持される。外部ハウジング部分794は、遠位円筒形セクション800、中心円錐形セクション802および近位小直径円筒形セクション804を有する、スルーボア798を規定する。複数の開口部806は、円錐形セクション802に形成される。開口部806は、デバイスの操作の間に、流体および組織の通過を可能にする寸法にされる。一対の正反対の可撓性係合部材807は、シェル782の近位円筒形セクション804上に形成される。係合部材807は、係合した本体614の遠位端上に形成された開口部809に受容されるように配置され、シェル782を係合した本体614に固定する。一対の開口部811は、外部チューブ614aの近位端に形成される。開口部811は、定常ハンドル618の内部壁上に形成される突出部(示さず)を受容する寸法にされ、チューブ614aをハンドル部分612に装着するのを容易にする。
【0086】
プッシャーバック786は、中心スルーボア808を備え、このスルーボアは、シェル782の内部ガイド部分796の周りにスライド可能に配置される。プッシャーバック786は、遠位円筒形セクション810を備え、この遠位円筒形セクションは、シェル782の遠位円筒形セクション800、中心円錐形セクション812および近位小直径円筒形セクション814内にスライド可能に配置される。プッシャーバック786の遠位面は、内部輪状ショルダー816および外部輪状レセス818を備える。プッシャーバック786の近位端は、プッシャーリンク674の可撓性アーム710を受容するように構成された一対のスロット820を備え、プッシャーリンク674をプッシャーバック786に留めて、プッシャーリンク674の遠位面がプッシャーバック786の近位面に隣接させる(図53を参照のこと)。
【0087】
プッシャー790は、ステープルガイド792からステープル830を発射するために、近位伸長リング824を有する本体822およびステープルガイド792に形成されたスロット828内にスライド可能に受容されるような寸法にされた多数の遠位伸長フィンガー826を備える。リング824は、プッシャーバック786の遠位面に形成された輪状レセス818内に受容されるような寸法にされ、プッシャー790をプッシャーバック786に固定する。円筒形ナイフ788は、その近位端の周りに形成された複数の半径方向伸長タブ832を備え、プッシャーバック786の遠位面とプッシャー790の本体822との間に配置されたタブ832を備えるバッキング786の輪状ショルダー816内に配置され、プッシャー790に対してナイフ788を固定する。ナイフ788の遠位端は、輪状カッティングエッジ834を備える。
【0088】
操作において、プッシャーリンク674が、以下に記載されるように、トリガー620を引く操作に応答して遠位方向に進められ、プッシャーバック786は、シェル782内で遠位に進められる。プッシャーバック786の前進は、プッシャー790およびナイフ788の前進をもたらす。プッシャー790が進められる場合、フィンガー826は、ステープルガイド792のスロット828内に配置されるステープル830と係合し、ステープル830をステープルガイド192から発射させる。
【0089】
図34、36、51および52を参照すると、ステープルデバイス610は、アンビル保持具638内にスライド可能に配置された収縮可能トロカールアセンブリを備える。収縮可能トロカールアセンブリは、トロカール840および係合部材842を備える。係合部材842は、示されるように、バネクリップの形態であり得る。あるいは、他の係合部材(例えば、スプリング充填突出部など)が想定される。トロカール840は、その長さの一部に沿ってトロカールの本体840を通って延びるスロット844を備える。スロット844は、係合部材842を受容する寸法にされる。係合部材842は、近位本体部分846および一対の遠位伸長弾力性脚部848を備える。各脚部848は、テーパー付けされた先端850および近位で面するショルダー852を備える。ピン854は、それぞれ、部材842およびトロカール840の本体部分846に形成された開口部856および858を介して配置され、係合部材842をトロカール840のスロット844内に固定する。ピン854はまた、アンビル保持具638に形成された細長スロット855を通って延び、スロット855の遠位表面および近位表面がストップとして機能し、収縮可能アンビルアセンブリの完全に進み、かつ、完全に収縮した位置を規定する。脚部848は、ばね鋼のような弾性材料から形成される。付勢されていない位置において、部材842の脚部848は、トロカール840およびアンビル保持具638の外側に延び、トロカール840の完全に進んだ位置において、脚部848のショルダー852が、アンビル保持具638の遠位端と係合し、この進んだ位置でトロカール840を固定する(図51を参照のこと)。
【0090】
図53を参照すると、アンビルアセンブリ630がアンビル保持具638に装着される場合、アンビルアセンブリ630のアンビルセンターロッド754は、脚部848のテーパー付けされた先端852上をスライドし、矢印「A」によって示された方向に向かって内側に脚部848を圧縮し、トロカール840および部材842がセンターロッド754のブラインドボア770内部で移動する。トロカール840の先端がボア770の底部と係合する場合、矢印「B」によって示される方向に、アンビル保持具638に向けられたセンターロッド754のさらなる移動は、トロカールアセンブリを、アンビル保持具638内の収縮された位置に移動させる。
【0091】
図53Aを参照すると、アンビルアセンブリが矢印「C」によって示される方向に向かってアンビルアセンブリを引くことによって、アンビル保持具638から開放さる場合、脚部848は外向きに曲がって、部材842の脚部848のショルダー852をセンターロッド754の輪状レセス774の方に移動させる。結果として、アンビルアセンブリ630は、アンビル保持具638から開放されるので、従って部材842およびトロカール840は、図57に示されるように、アンビルアセンブリを用いて矢印「D」によって示される方向に向かって進められた位置まで遠位方向に引かれる。
【0092】
トロカール840の近位端は、ブラインドボア841を備える。強固な可撓性ワイヤ843は、トロカール840のボア841内に固定される遠位端を有し、そして細長本体部分614を通って、ステープルデバイス610のハンドル部分612に向かって後方に延びる。ワイヤ843は、以下で詳細に議論されるハンドル部分612で標識アセンブリに固定される近位端を有する。
【0093】
図34、36、51および52をさらに参照すると、円筒形ロックアウトチューブ870は、アンビル保持具638の外部表面の周りにスライド可能に配置され、そしてシェル782の内部ガイド部分796、スリーブ784およびシェルアセンブリ631のロック部材787を通って延びるように配置される。ロックアウトチューブ870の近位端は、輪状突出部872を備える(図34)。シェルアセンブリ631のスリーブ784内に固定的に配置される、ロック部材787は、輪状突出部872を摩擦により受容する寸法にされた移動止め789を備え(図34A)、予め決められた力がロックアウトチューブ870上に及ぼされるまで、アンビル保持具638の周りでロックアウトチューブ870のスライド移動を防止する。ロックアウトチューブ870は、アンビルの近接の間に、脚部670に剛性を与えるためにアンビル保持具638の可撓性脚部670の周りに配置され、アンビルアセンブリ630が、アンビル保持具638から不利に脱着されるのを防止する。円筒形ロックアウトチューブ870のアンビル保持具の周りでの移動は、以下により詳細に議論される。
【0094】
図33、35、37、38A、および69〜72を参照すると、インジケーターアセンブリが、定常ハンドル618内に装着され、そして標識901a、901bおよび901cを有する表示900を備え、アンビルアセンブリが装着されていないか(901a)、アンビルアセンブリが装着されているか(901b)、またはアンビルアセンブリが装着および近接されているか(901c)(すなわち、このデバイスが既に発射されている)の表示ウインドウ624を介して外科医に視覚的表示を提供する。この表示901a〜cは、赤色、黄色、および緑色をそれぞれ含み得る。あるいは、他の色コードグラフィック、または書き込み標識を使用して、上記のデバイス状態を示し得る。
【0095】
インジケーターアセンブリは、表示900、インジケーターサブプレート902、表示アーム904、ネジストップ906および回転可能ディスク908を備える。ネジストップ906は、ネジ632の周りに配置されるような寸法にされたスルーボア910を備える。セットネジ912を使用して、ネジストップ906をネジ632に固定する。ディスク908は、中心スルーボア914、上方伸長カム部材916およびワイヤコネクター918を備える。ディスク908は、ネジ920によってネジストップ906の頂部に回転可能に固定される。ワイヤコネクター918は、ディスク908内の開口部924を通って延び、そしてDクリップ926などによってその中に回転可能に固定される、ポスト922を備える。ワイヤコネクター918は、ワイヤ843の一方の端部を受容するためのボア928を備える。ピン930は、ワイヤ843をワイヤコネクター918に固定し、上記のように、ワイヤ843が、アンビル保持具638上へのまたはこのアンビル保持具からのアンビルアセンブリ630の装着または脱着に応答して、進められるかまたは収縮される場合、カム部材916を回転させるために、ディスク908はネジ920の周りで回転する。
【0096】
インジケーターサブプレート902は、定常ハンドル618の内部壁に形成されたサブプレート902およびチャネル(示さず)に形成されるノッチ934を介して、定常ハンドル618の内部壁間で固定される。細長チャネル936上で規定する中心に配置されたカットアウト932は、サブプレート902に形成される。表示アーム904はまた、第一端937aおよび第二端937bを有する、カットアウト937を備える。細長チャネル936にスライド可能および回転可能に配置される突出部938は、サブプレート902中の表示アーム900から下方向に延びる。突出部940は、表示アーム904の頂部表面から、表示900の底部に形成された湾曲ボア941に延びる。突出部943は、表示900から下方向に延び、そして表示900をサブプレート902に回転可能に固定するために、サブプレート902のチャネル936に配置される。表示900の底部はまた、ディスク908のカム部材916を受容するためのカムスロット942を備える。
【0097】
このアセンブル状態において、インジケーターサブプレート902は、定常ハンドル618内に固定され、表示アーム904および表示900は、その上にスライド可能かつ回転可能に取り付けられ、表示900の湾曲ボア941は、表示アーム904の突出部940上に配置される。この全アセンブリは、表示ウインドウ624によって構築された状態で係合および保持される。カム部材916は、ディスク908から上向きに、サブプレート902中のチャネル936および表示アーム904中のカットアウト937を通って、表示900の底部に形成されたカムスロット942に向けて延びる。インジケーターサブプレート902と表示アーム904との間で支持されたバネ952は、表示アーム904を表示900を支持するサブプレート902の末端に向けて付勢する。図73〜75をまた参照すると、アンビルアセンブリ630をアンビル保持具638に装着する前に、標識901a(例えば、赤色ドット)が、表示ウインドウ624の開口部628の下に配置される(図73)。アンビルアセンブリ630が上記の様式でアンビル保持具638に装着される場合、トロカール840は、ワイヤ843を近位に移動させるためにアンビル保持具638内に収縮される(すなわち、近位に押出される)。ワイヤ843は、ディスク908の底部に固定されるコネクター918に固定される。ワイヤ843が近位に移動される場合、ディスク908は、ネジ920の回りのネジストップ906上で矢印「E」によって示される方向に向けて回転され、同一方向で表示900の底部に形成されたカムスロット942内に配置されるカム部材916を移動させる(図25)。カムスロット942に対するカム部材916の移動は、表示900を、突出部943の周りで矢印「F」によって示される方向に向かって回転させ、表示ウインドウ64の開口部628の下の標識901b(例えば、黄色のドット)を移動させる。カム部材916はまた、カットアウト937の第一末端937a付近の表示アーム904のカットアウト937と係合し、突出部938の周りで矢印「G」によって示される方向に図74に示される位置までアーム904を回転させる。上で議論されるように、標識901bは、アンビルがアンビル保持具に装着されるように外科医に表示する。
【0098】
次に、外科医がデバイスに近接する場合、ネジ632は、上記の様式で、近位に移動される。従って、ネジストップ906(これは、ネジ632上に取り付けられる)、およびディスク908(これは、カム部材916を備える)は、近位に移動される。カム部材916が近位に移動される場合、カム部材916は、表示900中のカムスロット942の外側に移動し、そして標識アーム904に形成されたカットアウト937の第一末端937aからカットアウト937の第二末端937bに移動する。カム部材916がカットアウト937の第二末端937bに到達する場合、カム部材916は、バネ952の付勢に対して、表示アーム904および薬物表示アーム904の壁905と近位で係合する。表示アーム904は、矢印「H」によって示される方向に向けて近位に移動され、表示900をまた近位に移動させて、表示ウインドウ624の開口部628の下に標識901c(例えば、緑色の光)を移動させる。上で議論されるように、標識901cは、アンビル保持具638に装着され、そして近接されたアンビルアセンブリ(すなわち、装置)が容易に発射されることを外科医に示す。
【0099】
外科用ステープルデバイス610の操作が、ここで、詳細に議論される。
【0100】
図47〜51は、非近接位置で、アンビル保持具638に装着されたアンビルアセンブリ631を備える外科用ステープルデバイス610を例示する。図47および49に示されるように、ネジ632は、ステープルデバイスの最も遠位位置に存在し、ネジストップ906は、プッシャーリンク674の近位末端に隣接して配置される。この位置において、ロックピン693(これは、安全リンク692に固定される(図31))は、トリガープレート676および678を発射する際のノッチ638に配置され(図39)、発射トリガー620の作動を防止する。図50に示されるように、アンビル保持具638の脚部670は、アンビルアセンブリ630のセンターロッド754の周りに配置され、センターロッド754のアベツメント775がアンビル保持具638の輪状レセス777内に配置される。ロックアウトチューブ870の輪状突出部872は、ロック部材787の移動止め789内に配置され(図54A)、このデバイスの近接の間、アンビル保持具638の脚部670の周りでロックアウトチューブ870を固定する。アンビル保持具638は、近接の間、ロックアウトチューブ870に引っ込められ、アンビル保持具638の脚部870の露出された長さは短く、アンビル保持具638からアンビルアセンブリ630を取り外すために必要とされる力を増大させる。アンビル保持具を、予め決められた距離でロックアウトチューブ870に収縮される場合、アンビル保持具638上のショルダー871は、ロックアウトチューブ870の遠位端と係合し(図54B)、移動止め789から輪状突出部872を押し込み、そしてアンビル保持具638と近位にロックアウトチューブ870を押し込む。
【0101】
図56および57を参照すると、アンビルアセンブリ630およびシェルアセンブリ631は、図56の矢印「J」によって示される方向に向かって近接ノブ622を回転することによって近接される。ノブ622の回転は、スリーブ633の回転をもたらし、ネジ632のチャネル650に沿ってスリーブピン652を移動させる。スリーブ633が定常ハンドル618に軸方向に固定されるので、ピン652がチャネル650を通って移動される場合、ネジ650が定常ハンドル618内で近位に移動される。ネジ650が近位に移動される場合、ネジ伸長部634および636、アンビル保持具638ならびにアンビルアセンブリ630を近位に引く。アンビルアセンブリ630は、シェルアセンブリ631と並列配列で近接される。
【0102】
図56に例示されるように、ネジ632が定常ハンドル618内に近位で移動される場合、ネジ632に固定されるネジストップ906がまた、近位に移動する。ネジトップ(screw stop)906が、下方向に延びるアバットメント1000および凹面1002を備える。近接の最終段階の間、アバットメント1000は、安全リンク692のガイド部材692bと係合し、安全リンク692を近位に引き、ガイド部材692bが、バネ697の付勢に対して定常ハンドル618の内部壁内でスロット695に沿って移動する。安全リンク692が近位に移動される場合、ロックピン693が、発射リンク672のチャネル690の上方向に移動し、そしてロックピン693は、発射トリガー620のノッチ683との係合を解除して、発射トリガーを作動させるために移動される。
【0103】
図57Aに例示されるように、アンビル保持具638上のショルダー871は、ロックアウトチューブ870を近位に移動させた結果、ロックアウトチューブ870上の輪状突出部872は、ロック部材787の移動止め789にもはや配置されない。
【0104】
図58〜61は、トリガー620の発射ストロークの間の、外科用ステープル610のハンドル部分62を例示する。アンビル630およびシェルアセンブリ631は近接された後、発射リンク672の末端698上の旋回部材700は、ネジストップ906の凹面1002に配置され、そしてロックピン693は、ノッチ683の近位に配置される。トリガーロック626はまた、解除され、すなわちロックなしの位置に手動で旋回される。外科用ステープルデバイス610は、ここで、発射位置にある。
【0105】
ステープルデバイス610を発射するために、発射トリガー620が、矢印「K」によって示される方向に向かって旋回される。旋回部材700は、ネジストップ906の凹面1002でロックされるので、トリガー620は、遠位に移動するように押し込められる。トリガー620は、旋回部材684によってプッシャーリンク674の近位端に固定される。従って、プッシャーリンク674はまた、細長本体部分614内で遠位に移動される。同時に、トリガープレート676および678の頂部表面は、ロックピン693と係合し、スロット695に沿って矢印「L」によって示される方向に向かってさらに近位に、安全リンク692のガイド部材692bを押し込める。発射トリガー620が、この発射ストロークの末端に到達する場合、発射トリガー620上に形成される係合部材1010は、安全リンク692の弱い部分699と係合し(図60)、安全リンク692を2つの部分に分断する(図61)。安全リンク692が分断した後、聴覚的表示および触覚的表示が、外科医に提供され、発射が完了する。発射トリガー620が収縮される場合(図61)、バネ706は、収縮位置までプッシャーリンク674を戻す。バネ697はまた、発射トリガー620のノッチ683と係合するようにロックピン693を戻し、発射トリガー620のさらなる旋回を防止する。安全リンク692が分断される場合、デバイス610の近接により、ノッチ683からロック部材693が取り除かれない。
【0106】
図62および65は、発射トリガー620の発射ストロークの直前および直後の、外科用ステープルデバイス610のヘッド部分616を例示する。上で議論されるように、プッシャーリンク674は、図65の矢印「M」によって示される方向に移動されるので、プッシャーバック786およびプッシャー790は、遠位方向に進み、フィンガー826がスロット828を通って押出され、ステープル830は、組織1040を通ってアンビル729のポケット740に向けて押し込まれる。同時に、円形ナイフ788は、組織の中心に進められる。ナイフ788が遠位に進められるので、ナイフ788は、カットリング728およびバックアッププレート726と係合し、さらにアンビルヘッド724に向けて移動して、バックアッププレート726のタブ750をセンターロッド754と係合しないよう移動させる。図66〜68を参照のこと。タブ750をセンターロッド754と係合しないよう移動させることによって、上記のように、アンビルヘッドアセンブリ720は、自由状態となり、アンビルアセンブリ630およびシェルアセンブリ631が近接しなくなった後、センターロッド754上の旋回部材764の周りで旋回する
外科用ステープルデバイス610を使用して、円形吻合を実施する。代表的に、円形吻合は、結腸または腸管のような疾患した脈管の一部を除去するための手順の間に必要とされる。このような手順の間、疾患した脈管の一部が除去され、そして残りの脈管セクションの末端部分が、外科用ステープルデバイスを使用して共に結合される。
【0107】
外科用ステープルデバイス610を使用するこのような手順の間、疾患した脈管の一部を除去する前に、そこに装着された除去可能なトロカール776を備えたアンビルアセンブルリ630(図46)は、疾患した脈管部分の第一側部上の第一脈管セクションに配置される。除去可能なトロカール776は、アンビルアセンブリを操作するための縫合ラインを受容するためのボア776aを備える。疾患した脈管部分が除去され、そして第一脈管セクションおよび第二脈管セクションの開放末端が縫合された後、図51に示されるようなデバイス610の遠位末端は、疾患した脈管部分の他の側部上の第二脈管セクションに配置される(ここでは、除去されない)。この時点で、トロカール776は、第一脈管セクションの末端の縫合ラインを介して押出され、そしてセンターロッド754から除去される。次に、トロカール840は、第二脈管セクションの縫合ラインを介して押出される。ここで、センターロッド754は、トロカール840の周りに配置され、そしてアンビルアセンブリ630をアンビル保持具638に固定するために、アンビル保持具638に押出される(図52)。外科用ステープルデバイス610は、ここで、上記の様式で近接され、そして発射され得、第一脈管セクションおよび第二脈管セクションの末端を結合し、そして脈管セクションの管腔を塞ぐ任意の組織を除去する。外科用ステープルデバイスが発射され、そして離れた後、ヘッドアセンブリ720が、図68に示される位置まで突き出され、アンビルアセンブリのプロフィールを減少させ、そして脈管管腔からの装置の取り出しを単純にする。アンビルアセンブリの解離の間、近接機構の構成要素と係合するハンドル部分612で係合部材を提供することが企図され、アンビルヘッドアセンブリが突き出るのに十分な距離で接近されない、触覚的表示および/聴覚的表示を提供する。この係合部材を移動して、発射トリガーによって近接機構の構成要素と整列した位置まで移動され得ることが想定される。
【0108】
種々の改変が、本明細書中に開示される実施形態に対してなされ得ることが理解される。例えば、このデバイスの個々の成分を構築するために使用される材料は、所望の結果を達成するために、種々の公知の材料から選択され得る。さらに、表示に形成される特定の標識は、本明細書中に開示される標識以外であり得る(すなわち、他の標識も想定される)。従って、上の記載は、限定としてではなく、好ましい実施形態の単位例示として構築されるべきである。当業者は、本明細書に添付される特許請求の範囲および精神内で他の改変を想定する。
【0109】
ここで開示される外科用ステープルデバイスの種々の好ましい実施形態が、図面を参照して本明細書中に開示される。
【技術分野】
【0001】
本願は、仮出願番号60/281,259(2001年4月3日出願)、60/327,653(2001年10月5日出願)および60/363,715(2002年3月11日出願)(これら全てはその全体が本明細書中で参考として援用される)の優先権を主張する。
【背景技術】
【0002】
(背景)
(1.技術分野)
本開示は一般に、身体組織に外科用ステープルを適用するための外科用ステープルデバイスに関する。より詳細には、本開示は、中空組織器官の輪状吻合を実施するための外科用ステープルデバイスに関する。
【0003】
(2.関連分野の背景)
吻合は、別個の中空器官部分が互いに連絡するためのこれらの部分の外科用連結である。代表的には、吻合手順は、中空組織の疾患部分または欠陥部分が除去され、そして残りの末端部分が連結される手術に続く。所望の吻合手順に依存して、これらの末端部分は、輪状、末端と側面、または側面と側面の器官再構築方法のいずれかによって連結され得る。
【0004】
輪状吻合手順において、器官部分の2つの末端は、ステープル器具によって連結され、このステープル器具は、各器官部分の末端部分を通してステープルの輪状アレイを進め、同時に任意の重なった組織に穴を開けて、管状通路を自由にする。中空器官の輪状吻合を実施するための器具の例は、米国特許第6,053,390号、同第5,588,579号、同第5,119,983号、同第5,005,749号、同第4,646,745号、同第4,576,167号および同第4,473,077号に記載される。代表的には、これらの器具は、近位端にハンドル部分を有するこの器具を作動するための細長シャフト、および遠位端に配置されたステープル保持要素を備える。取付けアンビルヘッドを有するアンビルロッドを備えるアンビルアセンブリは、遠位端に取り付けられる。ステープリングされる器官の反対側の末端部分は、このアンビルヘッドとステープル保持要素との間で留められる。この留められた組織は、ステープル保持要素から1つ以上のステープルを進めることによって、ステープリングされ、その結果、このステープルの端部は、組織を通過して、アンビルヘッドにより変形される。
【0005】
一般に、吻合手順の間、このアンビルアセンブリは、ステープルデバイスから分離され、そして患者内の組織部分の1つの中に配置され、そしてこのステープルデバイスは、他の部分組織内に配置される。その後、このアンビルアセンブリおよびステープルデバイスは、この組織部分をその間に留めるために再び取り付けられる。代表的には、配置は、アンビルアセンブリおよびステープル器具の1つまたは両方について、取り外し可能トロカールの使用を必要とする。外科用部位に対する視感度および接近性に対する制限に起因して、トロカールをアンビルアセンブリおよび/またはステープルデバイスに取付けそして取り外すことは、外科医にとって困難でありそして時間がかかり得る。さらに、このアンビルアセンブリがステープルデバイスに適切に再び取り付けられたか否かを決定することは、困難であり得る。
【発明の概要】
【課題を解決するための手段】
【0006】
(要旨)
本開示によると、輪状吻合を実施するための外科用ステープルデバイスが開示される。この外科用ステープルデバイスは、ハンドル部分、細長本体部分ならびにアンビルアセンブリおよびシェルアセンブリを含むヘッド部分を備える。このハンドル部分は、アンビルアセンブリおよびシェルアセンブリを接近させるための回転可能な接近ノブ、ならびにこのシェルアセンブリ内に配置されたステープルを発射するために発射機構を作動するための発射トリガーを備える。この発射トリガーは、この発射機構を作動するために設けられた二棒リンク機構(two bar linkage)の1つのリンクを形成する。この二棒リンク機構は、デバイスを発射するのに必要な発射力を減少するという改良された機械的利点を有するデバイスを提供する。
【0007】
ヘッド部分は、傾斜可能なアンビルを含むアンビルアセンブリを備え、この傾斜可能なアンビルは、デバイスの発射後に自動的に傾き、このアンビルアセンブリおよびシェルアセンブリを引き離す。この傾斜可能なアンビルは、減少したアンビルプロフィールを提供し、吻合手順が行われた後のデバイスの取り外しを簡単にする。このヘッド部分はまた、取り外し可能トロカールアセンブリを備え、これはアンビル保持具内にスライド可能に配置され、そしてアンビルアセンブリがこのアンビル保持具に取り付けられそして取り外された場合に、自動的に前進しそして引っ込められる。この収縮可能トロカールアセンブリは、トロカールをステープルデバイスに取付けそして取り外す工程を排除することによって、吻合手順を簡単にする。ロックアウトチューブが設けられ、そしてアンビルアセンブリと取り外し可能に係合するためのアンビル保持具の周りに配置される。このロックアウトチューブは、例えば、所定の程度の接近後のステープルデバイスの発射の間、アンビル保持具からアンビルアセンブリが誤って外れることを防止する。
【0008】
この外科用ステープルデバイスはまた、発射ロックアウトアセンブリを備え、これは、アンビルがデバイスに取り付けられ、そしてアンビルが接近されるまで、発射トリガーの作動を防止する。1つの好ましい実施形態において、発射ロックアウトアセンブリは、トリガーロックおよび安全ブラケットを備え、この安全ブラケットは、アンビルがデバイスに取り付けられ、そして接近されるまで、ロック位置からアンロック位置までのトリガーの移動を防止する。このロックアウトアセンブリはまた、デバイスが発射された後に、トリガーロックをロック位置に戻すためのロックアウトスリーブを備える。このロックアウトアセンブリは、外科医が、取り付けられたアンビルを用いずにデバイスを不注意に発射し、そしてすでに発射されそしてステープルを有さないデバイスを誤って発射するのを防ぐ。
【0009】
外科用ステープルデバイスはまた、触覚表示機構を備える。1つの好ましい実施形態において、この触覚表示機構は、デバイスが発射されたことを外科医に知らせる。別の好ましい実施形態において、この触覚表示器は、アンビルヘッドがアンビルヘッドを傾けるのに十分な距離離れ、従って、このデバイスが患者から取り出され得ることを外科医に知らせる。
【0010】
本発明はさらに、以下の項目も提供する。
(項目1)
外科用ステープルデバイスであって、以下:
ハンドル部分;
該ハンドル部分から遠位に伸延する細長体部分;
アンビルアセンブリおよび複数のステープルを収容するシェルアセンブリを備えるヘッド部分であって、該アンビルアセンブリは細長体部分の間隙部分と細長体部分接近部分との間で該シェルアセンブリに関して移動可能である、ヘッド部分;
該アンビルアセンブリに解放可能に係合するアンビル保持具を備える接近機構;および
該アンビル保持具によってスライド可能に支持されるトローカルを備える収縮可能トロカールアセンブリであって、該アンビル保持具中に位置付けられるトロカール収縮部分の間で、該アンビル保持具から伸延する前進部分まで移動可能である、収縮可能トロカールアセンブリ
を備える、外科用ステープルデバイス。
(項目2)
前記ハンドル部分が、該アンビル保持具に作動可能に接続された接近アクチュエーターを備え、該接近アクチュエーターは、前記細長体部分間隙部分と細長体部分接近部分との間で前記アンビルアセンブリおよびシェルアセンブリを移動するために移動可能である、項目1に記載の外科用ステープルデバイス。
(項目3)
項目2に記載の外科用ステープルデバイスであって、ここで、前記ハンドル部分が発射トリガーを備え、そして前記シェルアセンブリはプッシャーを備え、該発射トリガーは、該プッシャーに作動可能に接続されており、該発射トリガーの発動作用によって、前記シェルアセンブリ中での該プッシャーの移動がもたらされ、該シェルアセンブリからステープルを射出する、外科用ステープルデバイス。
(項目4)
前記収縮可能トロカールアセンブリは、前記トロカールに固定され、かつ前記伸長位置にトロカールを保持するために位置付けられるた係合部材を備える、項目1に記載の外科用ステープルデバイス。
(項目5)
前記係合部材が、前記アンビル保持具の輪状エッジを係合して、前記トロカールを前記伸長位置に保持するためのショルダーを有する少なくとも1つの弾性脚を備える、項目4に記載の外科用ステープルデバイス。
(項目6)
前記トロカールが、該トロカールの長さの少なくとも一部分にそって伸延するスロットを備え、該スロットは、前記係合部材を受けるように配置され、かつ寸法決めされる、項目5に記載の外科用ステープルデバイス。
(項目7)
前記アンビルアセンブリが、穴がその中に形成されるセンターロッドを備え、該穴は、該アンビル保持具を該アンビルアセンブリに結合する間に、該アンビル保持具の中で前記トロカールアセンブリの周りに位置付けられるために寸法決めされ、該トロカールが残基収縮位置まで移動される、項目6に記載の外科用ステープルデバイス。
(項目8)
前記アンビル保持具が、前記アンビルアセンブリのセンターロッドに解放可能に係合する位置付けられる複数の可撓性脚部を備える、項目7に記載の外科用ステープルデバイス。(項目9)
前記アンビル保持具が、前記アンビルアセンブリの前記センターロッドに解放可能に係合する位置付けられる複数の可撓性脚部を備える、項目1に記載の外科用ステープルデバイス。
(項目10)
項目9に記載の外科用ステープルデバイスであって、該デバイスは、前記アンビル保持具の周りにスライド可能に位置付けられるロックアウトチューブを備え、該ロックアウトチューブは、前記アンビルアセンブリおよび前記シェルアセンブリの近接の間で、該アンビル保持具の可撓性脚部の周囲に位置付けられ、細長体部分該アンビル保持具によるアンビルアセンブルからの該アンビルアセンブリの不慮の脱係合を防ぐ、外科用ステープルデバイス。
(項目11)
項目1に記載の外科用ステープルデバイスであって、インジケーターセンブリをさらに備え、該インジケーターセンブリは前記ハンドル部分に支持されたインジケーターを備え、該インジケーターは、前記アンビルと作動可能に結合して、前記アンビルアセンブリが前記アンビル保持具に結合しているか否かを識別する視覚的な指標を提供する、外科用ステープルデバイス。
(項目12)
項目11に記載の外科用ステープルデバイスであって、前記アンビルアセンブリがセンターロッドを備え、該センターロッドは、前記アンビル保持具に対する前記アセンブリの結合の間、前記収縮可能アセンブリと係合するように配置されて、トロカールを前記伸長位置から前記収縮位置へと移動させる、外科用ステープルデバイス。
(項目13)
項目11に記載の外科用ステープルデバイスであって、前記トロカールが前記インジケーターセンブリに作動可能に接続しており、その結果、前記伸長位置と収縮位置との間の該トロカールの移動によって、該インジケーターの移動がもたらされる、外科用ステープルデバイス。
(項目14)
前記細長体部分を通って伸延したワイヤーによって、前記トロカールが前記インジケーターに作動可能に接続している、項目13に記載の外科用ステープルデバイス。
(項目15)
外科用デバイスであって、以下:
ハンドル部分;
該ハンドル部分から遠位に伸延する本体部分;
細長体部分アンビルアセンブリおよびシェルアセンブリを備えるヘッド部分であって、該アンビルアセンブリは細長体部分間隙部分と細長体部分接近部分との間で該シェルアセンブリに対して移動可能である、ヘッド部分;
該アンビルアセンブリに解放可能に係合するように配置されるアンビル保持具を備える接近機構;ならびに
該ハンドル部分によって支持され、そして発射準備位置と発射非準備位置との間で移動可能であるインジケーター部材を備えるインジケーターセンブリであって、該インジケーターは、該アンビルアセンブリと作動可能に結合し、その結果、該インジケーター部材は、アンビルアセンブリが取り付けられない限り、該アンビル保持具に該発射可能位置まで移動しない、
外科用ステープルデバイス。
(項目16)
項目15に記載の外科用ステープルデバイスであって、前記アンビル保持具によって支持される移動可能なセンサーをさらに備え、該センサーは、該アンビル保持具との該アンビルアセンブリの係合および脱係合の間に、該アンビルアセンブリに係合するように位置付けられる、外科用ステープルデバイス。
(項目17)
前記センサーが伸長コネクターによって前記インジケーターセンブリと接続されている、項目16に記載の外科用ステープルデバイス。
(項目18)
項目17に記載の外科用ステープルデバイスであって、前記インジケーターセンブリが、回転可能ディスクを備え、前記伸長コネクターが該回転可能ディスクと前記センサーとの間で接続され、その結果、該センサーの移動によって、該回転可能ディスクの回転がもたらされる、外科用ステープルデバイス。
(項目19)
項目18に記載の外科用ステープルデバイスであって、ここで、前記接近機構がネジ部材を備え、該ネジ部材は、前記アンビル保持具に作動可能に接続し、そして、接続アクチュエーターの回転に応答して、前記ハンドル部分内を軸方向に移動可能である、外科用ステープルデバイス。
(項目20)
項目19に記載の外科用ステープルデバイスであって、ここで、前記旋回可能なディスクは、前記インジケーターで形成されたカムスロットにおいてスライド可能に受け入れられるように配置された突出部を備え、該ディスクは前記ネジとともに移動可能であって、前記アンビルアセンブリと前記シェルアセンブリとの接近の間に、該インジケーターの移動を与え、該デバイスが接近したか否かを識別する指標を提供する、外科用ステープルデバイス。
(項目21)
輪状外科用ステープルデバイスの伸長中空シャフトにおける用途のためのプッシャーリンクであって、該ステープルデバイスは、以下:
伸長プッシャーリンクであって、長手軸、近位端、遠位端、それのそれぞれの近位端および遠位端に隣接する輪状部分、ならびに該輪状部分の間であり、そして該輪状部分に接続する伸長中間部分を有する、伸長プッシャーリンク;
該プッシャーリンクの近位端に近位に位置付けられ、そして、該近位端に接続される、発射アクチュエーター;
該プッシャーリンクの遠位端に作動可能に結合するシェルアセンブリであって、該シェルアセンブリは、複数のステープルを収容し、かつアンビルアセンブリに接続可能な伸長部材を有している、シェルアセンブリ;
該プッシャーリンクを収容するための伸長穴を有する、伸長管シャフト、および
該管シャフト中で、該管シャフトの直径に沿って収容された、一対の伸長した実質的に平坦な伸長部材;
を備え、
ここで、該プッシャーリンクの中間部分の一部分は、該プッシャーリンクの長手軸を横切る垂直切片で見た場合にU字形状の構成を有し、該U字形状の構成は、実質的に平坦な底壁を備え、該底壁は、管シャフトの直径に平行であって、該管シャフトの直径の一方の側に配置され、そして、該管シャフトの直径に隣接し、該底壁の各端は、該直径を横断して、かつ該管シャフトの穴の内面の一部分にそって隣接する直立した側壁を有し、該底壁は該管シャフトの穴の半径の半分よりも小さい厚さを有する、プッシャーリンク。
(項目22)
前記伸長部材は、前記プッシャーリンクの底面壁に隣接する前記管シャフトの直径に沿って配置される、項目21に記載のプッシャーリンク。
【図面の簡単な説明】
【0011】
【図1】図1は、ここで開示される外科用ステープルデバイスの一実施形態の近位端からの立側面斜視図である。
【図2】図2は、図1に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図3】図3は、ここで開示される外科用ステープルデバイスの別の好ましい実施形態の近位端からの立側面斜視図である。
【図4】図4は、図3に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図5】図5は、ここで開示される外科用ステープルデバイスの別の好ましい実施形態の近位端からの立側面斜視図である。
【図6】図6は、図5に示される外科用ステープルデバイスの遠位端からの立側面斜視図である。
【図7】図7は、図1に示される外科用ステープルデバイスの近位端の立側面斜視図であり、ここでハンドルは取り外されている。
【図8−1】図8は、図7に示される外科用ステープルデバイスの近位端の立側面斜視図であり、ここで部品は分離されている。
【図8−2】図8Aは、図8に示される細部の指定された領域の拡大図である。図8Bは、図8に示される外科用ステープルデバイスの触覚表示器の立側面斜視図である。
【図9−1】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−2】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−3】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−4】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図9−5】図9は、図1に示される外科用ステープルデバイスの中心部分および遠位部分の立側面斜視図であり、ここで部品は分離されている。図9Aは、図1に示される外科用ステープルデバイスの中心部分および遠位部分の別の好ましい実施形態の立側面斜視図であり、ここで部品は分離されている。図9Bは、図9Aに示されるプッシャーリンクの側立面図である。図9Cは、図9Bに示されるプッシャーリンクの上面図である。図9Dは、図9Cの断面線9D−9Dに沿ってとった断面図である。図9Eは、図9Bの断面線9E−9Eに沿ってとった断面図である。図9Fは、図9Bの断面線9F−9Fに沿ってとった断面図である。図9Gは、図9Bの断面線9G−9Gに沿ってとった断面図である。図9Hは、図9Bの断面線9H−9Hに沿ってとった断面図である。図9Jは、図9Bの断面線9J−9Jに沿ってとった断面図である。図9Kは、図9Bの断面線9K−9Kに沿ってとった断面図である。図9Lは、図1に示される外科用ステープルデバイスの細長本体の断面図である。図9Mは、図1に示される外科用ステープルデバイスのスペーサーの上面斜視図である。図9Nは、図9Mに示されるスペーサーの底面斜視図である。図10は、図9に示される細部の指定された領域の拡大図である。図11は、図1に示されるネジおよびネジ止めアセンブリ、ならびに外科用ステープルデバイスのカム調整機構(部品は分離されている)の立側面斜視図である。
【図11】図11Aは、図11に示される外科用ステープルデバイスのネジおよびネジ止めアセンブリの側立面部分断面図である。図11Bは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図である。図11Cは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図であり、ここでこのカム調整機構は、反時計回り方向に回転される。図11Dは、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の側立面部分断面図であり、ここでこのカム調整機構は、時計回り方向に回転される。
【図12】図12は、図11に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の上面斜視図である。
【図13】図13は、図12に示されるネジおよびネジ止めアセンブリ、ならびにカム調整機構の底面斜視図である。
【図14】図14は、図1に示される外科用ステープルデバイスの回転可能スリーブおよび発射ロックアウトアセンブリの立側面斜視図であり、ここで部品は分離されている。
【図15】図15は、図1に示される外科用ステープルデバイスのアンビルアセンブリの立側面斜視図である。
【図15A】図15Aは、図1に示される外科用ステープルデバイスのアンビルアセンブリの遠位端からの立面斜視図である。
【図15B】図15Bは、図15に示される外科用ステープルデバイスのアンビルセンターロッドの近位端の断面図である。
【図15C】図15Cは、図15に示されるアンビルアセンブリのアンビルセンターロッドの遠位端に配置されたトロカールの側断面図である。
【図16】図16は、図15に示されるアンビルアセンブリの立側面斜視図であり、ここで部品は分離されている。
【図16A】図16Aは、図15に示されるアンビルアセンブリの側断面図である。
【図16B】図16Bは、図15に示されるアンビルアセンブリの側断面図であり、ここで、バックアッププレートおよび切断リングは遠位に進められている。
【図17】図17は、図14に示される回転可能スリーブおよび発射ロックアウトアセンブリの遠位端からの立側面斜視図である。
【図18】図18は、図14に示される回転可能スリーブおよび発射ロックアウトアセンブリの近位端からの立側面斜視図である。
【図19−1】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−2】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−3】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−4】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図19−5】図19は、アンビルアセンブリの取付け前の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されている。図19Aは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Bは、図19に示される外科用ステープルデバイスの側断面図である。図19Cは、図19Bに示される細部の指定された領域の拡大図である。図19Dは、図19Bに示される細部の指定された領域の拡大図である。図19Eは、図19に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図19Fは、図19に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図19Gは、図19に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図19Hは、図19Dの断面線19H−19Hに沿ってとった断面図である。
【図20−1】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−2】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−3】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−4】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−5】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図20−6】図20は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、そしてアンビルアセンブリが取り付けられている。図20Aは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Bは、図20に示される外科用ステープルデバイスの立側面断面図である。図20Cは、図20Bに示される細部の指定された領域の拡大図である。図20Dは、図20Bに示される細部の指定された領域の拡大図である。図20Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図20Fは、図20に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図20Gは、アンビルアセンブリをアンビル保持具に取り付ける前の、図1に示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Hは、アンビルアセンブリをアンビル保持具に取り付ける間の、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図である。図20Iは、図20Gに示されるシェルアセンブリの遠位端およびアンビルアセンブリの側断面図であり、ここでこのアンビルアセンブリはアンビル保持具に取り付けられている。図20Kは、図20Jに示される細部の指定された領域の拡大図である。
【図21−1】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−2】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−3】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−4】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図21−5】図21は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外されており、そしてアンビルアセンブリは近接位置にある。図21Aは、図21に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Bは、図21に示される外科用ステープルデバイスの側断面図である。図21Cは、図21Bに示される細部の指定された領域の拡大図である。図21Dは、図21Bに示される細部の指定された領域の拡大図である。図21Eは、図20に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図21Fは、図21に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図21Gは、図21に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。図21Hは、図21に示される外科用ステープルデバイスの遠位端の斜視断面図である。
【図22−1】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−2】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−3】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図22−4】図22は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられ、そして発射トリガーが作動されている。図22Aは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Bは、図22に示される外科用ステープルデバイスの側断面図である。図22Cは、図22Bに示される細部の指定された領域の拡大図である。図22Dは、図22Bに示される細部の指定された領域の拡大図である。図22Eは、図22に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図22Fは、図22Eの細部の指定された領域の拡大図である。
【図23−1】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−2】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−3】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−4】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図23−5】図23は、デバイスが発射された後の、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリが取り付けられている。図23Aは、図23に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分が取り外されている。図23Bは、図23に示される外科用ステープルデバイスの側断面図である。図23Cは、図23Bに示される細部の指定された領域の拡大図である。図23Dは、図23Bに示される細部の指定された領域の拡大図である。図23Eは、図23Eに示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図23Fは、図23に示される外科用ステープルデバイスの近位端の上面斜視図であり、ここでハンドル部分は取り外されている。図23Gは、図23に示される外科用ステープルデバイスの近位端の一部の底面斜視図であり、ここでハンドル部分は取り外されている。
【図24−1】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−2】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−3】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−4】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図24−5】図24は、図1に示される外科用ステープルデバイスの側立面図であり、ここでハンドル部分は取り外され、アンビルアセンブリは分離され、そしてアンビルヘッドは傾いている。図24Aは、図24に示される外科用ステープルデバイスの近位端の側面図であり、ここでハンドル部分は取り外されている。図24Bは、図24に示される外科用ステープルデバイスの側断面図である。図24Cは、図24Bに示される細部の指定された領域の拡大図である。図24Dは、図24Bに示される細部の指定された領域の拡大図である。図24Eは、図1に示されるアンビルアセンブリの遠位末端の、側方断面の部分的破線図であり、アンビルヘッドを部分的に傾けている。図24Fは、図24Eに示されるアンビルアセンブリの遠位末端の、側方断面の部分点線図であり、アンビルヘッドを完全に傾けている。図24Gは、図24に示される外科用ステープルデバイスの近位末端の側面図である。図24Hは、アンビルヘッドが完全に傾き得る位置においてアンビルアセンブリが接近しない間の、図1に示される外科用ステープルデバイスの触覚インジケーターおよびネジ止めの拡大図である。
【図25】図25は、未接近位置での、本発明により開示される外科用ステープルデバイスの1実施形態の前方透視図である。
【図26】図26は、接近位置での、図25に示される外科用ステープルデバイスのヘッド部分の透視図である。
【図27】図27は、図25に示される外科用ステープルデバイスの後方透視図である。
【図28】図28は、図25に示される外科用ステープルデバイスの上面図である。
【図29】図29は、図25に示される外科用ステープルデバイスの側面図である。
【図30】図30は、図25に示される外科用ステープルデバイスの側方透視図であり、静止ハンドルの区画が取り外されている。
【図31】図31は、ハンドル部分の一部が分解されたアンビルアセンブリを除外する、図25に示される外科用ステープルデバイスの部分的に切り取った透視図である。図31Aは、図25に示される外科用ステープルデバイスの発射機構の後方リンクおよび安全リンクの透視図である。
【図32】図32は、図25に示される外科用ステープルデバイスの前方部分的切り取り透視図であり、静止ハンドル、トリガーおよびインジケーターアセンブリが取り外されている。図32Aは、図32の近位部分の後方透視図である。
【図33】図33は、図32の近位部分の拡大図である。
【図34】図34は、図25に示される外科用ステープルデバイスの拡大した本体部分およびヘッド部分(アンビルを除く)の分解された部分の透視図である。図34Aは、図34に詳細に示された、指示された領域の拡大図である。図34Bは、図34に詳細に示された、指示された領域の拡大図である。
【図35】図35は、プッシャーリンクの近位末端およびインジケーターコネクタアセンブリの分解された部分の透視図である。
【図36】図36は、図25に示される外科用ステープルデバイスの接近機構の遠位部分および引き込み可能トロカールアセンブリの分解された部分の透視図である。
【図37】図37は、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面透視図である。
【図38】図38は、図37に示されるインジケーターアセンブリの分解された部分の平面透視図である。
【図38A】図38Aは、図37に示されるインジケーターアセンブリの底部透視図である。
【図39】図39は、図25に示される外科用ステープルデバイスのトリガーアセンブリの透視図である。
【図40】図40は、図39に示されるトリガーアセンブリの分解された部分の透視図である。
【図41】図41は、図25に示される外科用ステープルデバイスのアンビルアセンブリの後方透視図である。
【図42】図42は、図41に示されるアンビルアセンブリの前方透視図である。
【図43】図43は、図41に示されるアンビルアセンブリの後方透視図であり、取り外し可能なトロカールが、アンビルセンターロッドに装着されている。
【図44】図44は、図25に示される外科用ステープルデバイスのアンビルアセンブリの分解された部分の透視図である。
【図45】図45は、装着前の、図43に示されたアンビルアセンブリおよび取り外し可能なトロカールの側方断面図である。
【図46】図46は、装着された構成でのアンビルアセンブリおよび取り外し可能なトロカールの側方断面図である。
【図47】図47は、デバイスの接近および発射前の、図25に示される外科用ステープルデバイスのハンドル部分の側面図であり、静止ハンドルの区画が取り外されている。
【図48】図48は、図25に示される外科用ステープルデバイスの側方断面図である。
【図49】図49は、図48に詳細に示された、指示された領域の拡大図である。
【図49A】図49Aは、図49に詳細に示された、指示された領域の拡大図である。
【図50】図50は、図48に詳細に示された、指示された領域の拡大図である。
【図51】図51は、アンビルアセンブリを除いた外科用ステープルデバイスのヘッド部分の側方断面図であり、トロカールアセンブリは伸ばされた位置にある。
【図52】図52は、図50の断面線52−52に沿ってとった側方断面図である。
【図53】図53は、アンビル保持具へのアンビルアセンブリの装着直前の、図25に示される外科用ステープルデバイスの遠位末端の側方断面図である。
【図53A】図53Aは、アンビル保持具へのアンビルアセンブリの装着の間の、図25に示される外科用ステープルデバイスの遠位末端の側方断面図である。
【図54】図54は、図25に示される外科用ステープルデバイスの遠位末端の側方断面図であり、アンビルアセンブリは、シェルアセンブリから間隔が開けられている。図54Aは、図54に詳細に示された、指示された領域の拡大図である。図54Bは、図54に詳細に示された、指示された領域の拡大図である。
【図55】図55は、図25に示される外科用ステープルデバイスの側方断面図であり、アンビルアセンブリおよびシェルアセンブリは、接近した位置にある。
【図56】図56は、図55に詳細に示された、指示された領域の拡大図である。
【図57】図57は、図55に詳細に示された、指示された領域の拡大図である。図57Aは、図57に詳細に示された、指示された領域の拡大図である。
【図58】図58は、デバイスが接近した後、かつ発射トリガーの発射動作開始の間の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図59】図59は、デバイスが接近した後、かつ発射トリガーの発射動作終了の間の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図60】図60は、発射トリガーの発射動作後の、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図61】図61は、発射トリガーの発射動作後の、トリガーが開放された、図25に示される外科用ステープルデバイスのハンドル部分の側方断面図である。
【図62】図62は、接近位置にある、図25に示される外科用ステープルデバイスのヘッド部分の側方断面図である。
【図63】図63は、図25に示される固定デバイスのアンビルアセンブリの透視図であり、アンビルヘッドおよびアンビルが取り外されている。
【図64】図64は、図25に示される固定デバイスのアンビルアセンブリの側面図であり、アンビルヘッドアセンブリの一部が破線である。
【図65】図65は、デバイスの発射動作中の、図25に示される外科用ステープルデバイスのヘッド部分の側方断面図である。
【図66】図66は、固定デバイスの発射動作中のアンビルアセンブリの、一部が破線で示された側面図である。
【図67】図67は、図66に示されたアンビルアセンブリの側面図であり、アンビルヘッドアセンブリが、部分的に傾いた位置にある。
【図68】図68は、完全に傾いた位置にある、図66に示されたアンビルアセンブリの側面図である。
【図69】図69は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターの底部透視図である。
【図70】図70は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターの底面図である。
【図71】図71は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケーターアームの平面図である。
【図72】図72は、図25に示される外科用ステープルデバイスのインジケーターアセンブリのインジケータープレートの底面図である。
【図73】図73は、デバイスのアンビル装着および接近の前の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【図74】図74は、アンビルアセンブリが装着された後であるが、デバイスの接近の前の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【図75】図75は、アンビルアセンブリが装着され、そしてデバイスが接近した後の、図25に示される外科用ステープルデバイスのインジケーターアセンブリの平面図である。
【発明を実施するための形態】
【0012】
(好ましい実施形態の詳細な説明)
本発明により開示される外科用ステープルデバイスの好ましい実施形態は、本明細書中で、図面を参照して詳細に記載され、ここで、同様の参照番号は、いくつかの図面の各々において、同一の要素または対応する要素を示す。
【0013】
図1〜6は、一般に10で示される、本発明により開示される外科用ステープルデバイスの1つの好ましい実施形態を示す。簡潔には、外科用ステープルデバイス10は、近位ハンドル部分12、伸長した中心的本体部分14(この中心的本体部分14は、曲がった伸長外側チューブ14aを含む)および遠位ヘッド部分16を備える。あるいは、いくつかの外科用手順(例えば、痔の処置)において、実質的に真っ直ぐな中心的本体部分を有することが所望される。図3および図4を参照のこと。さらに、本体部分14およびヘッド部分16の長さおよび/または直径は、特定の外科用手順に適するように変化し得る。図5および図6を参照のこと。本記載を通じて、用語「近位」とは、作業者に最も近い機器の部分をいい、そして用語「遠位」とは、作業者から最も離れた機器の部分をいう。
【0014】
ハンドル部分12は、静止ハンドル18、発射トリガー20、回転可能接近ノブ22およびインジケーター開口部24を備える。静止ハンドル18は、好ましくは、熱可塑性ハンドル区画18aおよび18b(例えば、ポリカーボネート)から形成され、これらは、一緒になって、ハンドル部分12の内部構成要素についてのハウジングを規定する。ハンドル区画18aおよび18bは、好ましくは、超音波溶接によって一緒に固定される。あるいは、他の公知の固定技術(ネジ、接着剤、スナップフィットコネクタなどを含む)が使用され得る。ハンドル部分12の内部構成要素は、以下に詳細に考察される。クッション性および/または弾性の耐滑り性グリップ19は、好ましくはオーバーモールド手段を使用して、ハンドル区画18aおよび18bならびに発射トリガー20に固定されるかまたはこれらの一部として含まれる。グリップ19は、ネオプレンまたはゴムから形成され得る。あるいは、他の適切な材料および接合技術が使用され得る。旋回可能に取りつけられたトリガーロック26は、ハンドル部分12に固定され、そして固定デバイス10の不慮の発射を防止するために手動で位置付けられる。インジケーター開口部24は、開口部または半透明表面を規定し、これらは、固定デバイス10が、発射準備位置にあるか否かを識別する、内部に配置されたインジケーターを見ることを容易にする。
【0015】
ヘッド部分16は、アンビルアセンブリ30およびシェルアセンブリ31を備える。これらのアセンブリの各々は、以下に詳細に考察される。他に示される場合を除き、外科用デバイス10の構成要素は、ポリカーボネートを含む熱可塑性材料ならびにステンレス鋼およびアルミニウムを含む金属から形成される。特定の構成要素を形成するために選択される特定の材料は、特定の構成要素の強度要件に依存する。例えば、このアンビルは、ステンレス鋼のような金属から形成され、そしてこの静止ハンドルは、ポリカーボネートのような熱可塑性材料から形成される。あるいは、好ましくは滅菌手順に耐え得る、上に列挙されない他の材料が使用されて、固定デバイス10の構成要素を形成し得、但し、これらの材料は、外科用使用に適切であり、かつ特定の構成要素の強度要件を満たす。
【0016】
図7および8は、外科用ステープルデバイス10のハンドル部分12の内部構成要素を示す。ハンドル部分12は、指示機構、ロックアウト機構、接近機構の近位構成要素および発射機構、ならびにこの外科用ステープルデバイスの安全および効果的作動を得るための他の機構を収容する。これらの機構の各々は、以下に詳細に記載される。
【0017】
(接近機構)
図7〜14を参照して、接近機構は、接近ノブ22、回転可能なスリーブ33(図14)、ネジ32、それぞれ、第一のネジ外延34および第二のネジ外延36(図9)、ならびにアンビル保持具アセンブリ38(図10)を備える。回転可能なスリーブ33は、小さい直径の円筒型中空本体部分40および大きい直径の中空本体部分42を備える。本体部分40および42は、センターボア33aを規定する。本体部分42は、静止ハンドル18の内壁上に形成された内側に伸びる輪状フランジ46を受容するように寸法決めされた、輪状溝44を備える(図7)。溝44とフランジ46との間の係合は、比較的回転可能にしたままで、静止ハンドル18内のスリーブ30を軸方向に固定する。回転可能スリーブ33の中空本体部分40の近位末端は、静止ハンドル18の近位末端に形成される開口部を通って伸び、そして正反対に伸びたリブ48を備える。接近ノブ22は、キャップ22aおよび本体22bを備え、これらは、スリーブ30のリブ48を受容するように構成された正反対に伸びたスロット49aを有するボア49を規定し、その結果、ノブ22の回転は、スリーブ30の同時回転をもたらす。
【0018】
ネジ32の近位末端は、螺旋状チャネル50を備え、そして回転可能スリーブ33のセンターボア33a内にスライド可能に配置されるように寸法決めされる。ピン52(図14)は、スリーブ33の本体部分42を通って螺旋状チャネル50に放射状に伸びる。スリーブ33は、静止ハンドル18に関して軸方向に固定されるので、ネジ32の周りでのスリーブ33の回転は、ピン52をネジ32のチャネル50に沿って移動させて、静止ハンドル18内のネジ32の軸方向の移動をもたらす。軸方向に伸びる溝32aは、ネジ32の遠位部分に沿って形成される。溝32aは、以下に記載されるような指示リンクまたはワイヤを受容するように寸法決めされる。
【0019】
ネジ32の遠位末端は、横行スロット54を備える。上部のネジ外延34および下部のネジ外延36(図9)は、それぞれ、近位に位置した可撓性の平らなバンド部分58および遠位に位置した平らなバンド部分60を備える。上部のネジ外延34および下部のネジ外延36の可撓性により、曲がった伸長本体部分14を通る、ネジ外延34および36の移動が可能となる。各バンド部分58の近位末端は、ネジ32の横行スロット54内のネジ外延34および36の近位末端を固定するためのピン64を受容するように寸法決めされた穴62を備える。あるいは、他の固定技術(例えば、溶接、圧接など)を使用して、各バンド部分58をネジ32に固定し得る。各ネジ外延34および36の遠位に配置されたバンド部分60は、アンビル保持具38の近位末端において形成された横行スロット66内に受容されて(図10)、ネジ外延34および36の遠位末端にアンビル保持具38を固定するように、寸法決めされる。好ましくは、バンド部分60は、スロット66内に蝋付けまたは溶接される。あるいは、他の固定技術(ネジ、圧接などを含む)が使用され得る。アンビル保持具38の遠位末端は、複数の可撓性レッグ70を備え、これらは、以下にさらに詳細に考察されるように、アンビルアセンブリを受容および係合するために、外側に向けて曲がるように構成される。
【0020】
操作において、接近ノブ22が手動で回転される場合、回転可能なスリーブ33は、ネジ32の近位末端の周りで回転して、ピン52を、ネジ32の螺旋状チャネル50に沿って動かす。スリーブ33は、静止ハンドル18に軸方向に固定されるので、ピン52がチャネル50を通って移動する場合、ネジ32は、静止ハンドル18内で進められるかまたは引っ込められる。結果として、上部ネジ外延34および下部ネジ外延36(これらは、ネジ32の遠位末端に固定されている)ならびにアンビルインジケーター38(これは、ネジ外延34および36の遠位末端に固定されている)は、伸長本体部分14内を軸方向に移動する。アンビルアセンブリ30は、アンビル保持具38の遠位末端に固定されるので、接近ノブ22の回転は、空間の開いた位置と接近した位置との間での、シェルアセンブリ31に関するアンビルアセンブリ30の移動をもたらす。
【0021】
(発射機構)
図7〜9を参照して、発射機構は、発射トリガー20、発射リンク72および伸長プッシャーリンク74を備える。発射トリガー20は、本体部分76およびトリガーカバー80を備える。好ましくはネオプレンまたはゴムによって形成されたクッション性グリップ表面82が、トリガーカバー80上に提供される。クッション性グリップ表面19は、滑らないクッション性表面を提供して、デバイス10の作動を、外科医にとってより快適なものにする。トリガー20の本体部分76は、旋回部材84によって、プッシャーリンク74の近位末端に固定された連結部材86に旋回可能に接続される。連結部材86は、プッシャーリンク74と一体形成され得るか、またはプッシャーリンク74に固定された別個の要素として形成され得る。発射リンク72は、旋回部材87によってトリガー20の本体部分76に旋回可能に固定された第一末端、および旋回部材79によって、静止ハンドル18の静止ハンドルの半分区画18aおよび18bとの間に形成された垂直スロット82内に旋回可能に固定された第二末端を有する。旋回部材79は、スロット82内を垂直に移動するように、フリーである。バネ82aは、ハンドル18内に支持されて、スロット82の底に向けて下側へ、旋回部材79を推進する。本体部分76は、アバットメント89およびアバットメント91を含む1対のアバットメントをさらに備え、これらは、デバイス10が接近する前およびデバイス10が発射した後に、トリガー20の作動を防止するために、以下により詳細に記載される様式で、トリガーロック26の遠位末端に係合するように位置づけられる。突出部93はまた、発射トリガー20の本体部分76上に形成され、そして以下に記載されるように、外科用ステープルデバイス10の発射ロックアウト機構のトリガーロック戻し機構を起動するように構成される。
【0022】
伸長したプッシャーリンク74の近位末端上に支持される連結部材86は、フランジ104を備える(図9)。静止ハンドル18内の内壁またはアバットメントとフランジ104との間に位置付けられたバネ106は、引っ込められた非発射位置に対して近位のプッシャーリンク74を偏らせる。1対のウイング108は、連結部材86から外側に放射状に伸びる。ウイング108は、静止ハンドル18の内壁に沿って形成されたスロット111(図8)に沿ってスライドして、デバイス10の発射の間に静止ハンドル18内でプッシャーリンク74の適切な配置を維持するように寸法決めされる。
【0023】
プッシャーリンク74の遠位末端は、1対の係合フィンガー110を備え、これらは、プッシャーバック186の近位末端において形成される部材220とロッキングして係合するように寸法決めされる。プッシャーバック186は、シェルアセンブリ31の一部を形成し、そして以下でより詳細に考察される。プッシャーリンク74は、好ましくは、可撓性プラスチック材料から形成され、そして複数のノッチ187を備え得、これらのノッチにより、このプッシャーリンクは、本体14を通って移動する場合に、より容易に屈曲することが可能である。プッシャーリンク74は、接近機構をスライド可能に受容するための中空チャネル75を規定する。平らな表面またはカットアウト74aは、ネジ外延34および36をスライド可能に支持する。スペーサー77は、カットアウト74aに隣接する外側チューブ14a内に配置されて、ネジ外延34および36ならびにプッシャーリンク74についてのさらなる支持を提供して、このような構成要素が起動の間に留め付けられるのを防止する。輪状チャネル74bは、O−リングシール74cを受容するように、プッシャーリンク74の周りに形成される。プッシャーリンク74は、本体部分14内にスライド可能に位置付けられ、その結果、O−リング74cは、プッシャーリンク74と本体部分14の内壁との間の空間をシールする。このデバイスの発射機構の作動は、以下により詳細に記載される。
【0024】
図9Aは、本発明の開示される外科用ステープルデバイスの発射機構の好ましい実施形態を図示する。図9Aにおいて、プッシャーリンク74’は、プッシャーリンクを作製する材料の量を減少し、なおプッシャーリンクの曲げモーメント、従って発射機構を作動させるために必要とされる力を減少させるように改変される。また、図9B〜9Eを参照して、プッシャーリンク74’は、上側平坦部74a’および下側平坦部74b’、ならびに遠位管状端部セクション74f’および近位管状端部セクション74e’を有する曲線状の本体部分を備える。スロット74c’は、上側平坦部74a’内に形成され、そしてインジケーターリンクまたはワイヤを受容するような寸法であり、これは、以下にさらに詳細に記載される。上側平坦部74a’は、ネジ伸長部34および36をスライド可能に支持する寸法である。スペーサー77(上で考察される通り)は、ネジ伸長部34および36に接するように、上側平坦部74a’に隣接して配置される(図9L)。プッシャーリンク74’は、一対の側壁74d’を備え、これらの側壁は、ネジ伸長部34および36を制限する。図9Dに示されるように、好ましくは、側壁74d’は、上側平坦部74a’の長さに延び、そしてプッシャーリンク74’の管状端部セクション74e’および74f’と連絡する。側壁74d’は、外側チューブ14aの中心線の上および下において、プッシャーリンクの一部におけるプッシャーリンク74’に沿って及ぼされる圧縮力をその一部に対してバランスをとるかまたは等しくするために、圧縮力を運ぶ。
【0025】
発射トリガー20が作動される(すなわち、旋回部材84の周りで旋回する)場合、発射リンク72は、旋回部材79がネジストップ306上に形成されるアバットメント表面307(図11A〜D)と係合するまで、近位に移動する。その後、発射トリガー20は、バネ106の付勢に対して遠位にプッシャーリンク74または74’を進めるように、遠位に押される。プッシャーリンク74または74’の遠位端がプッシャーバック186に接続されるので、発射トリガー20の作動は、シェルアセンブリ31内のプッシャーバック186の進行をもたらして、以下に記載される様式で、シェルアセンブリ31からステープルを排出する。
【0026】
(アンビルアセンブリ)
図15〜16Aを参照して、アンビルアセンブリ30は、アンビルヘッドアセンブリ120およびアンビルセンターロッドアセンブリ152を備える。アンビルヘッドアセンブリ120は、ポスト122、アンビルヘッド124、バックアッププレート126、切断リング128およびアンビル129を備える。アンビルヘッド124は、内側管状レセス134および外側管状レセス136を備える。ポスト122は、アンビルヘッド124の内側管状レセス134内の中心に配置される。アンビル129は、管状レセス136内のアンビルヘッド124上に支持され、そしてステープルを受容しそして変形させるための複数のポケット140を備える。バックアッププレート126は、中心開口126bを備え、この中心開口は、ポスト122と管状レセス136との間に規定されるレセス134内のポスト122の周りに配置される。バックアップリング126は、高くなったプラットフォーム126aを備える。切断環128は、プラットフォーム126aと実質的に同じ構成を有する開口128aを備える。開口128aは、プラットフォームの周りに配置されて、バックアップリング126上に切断環128aを回転可能に固定する。好ましくは、切断環128は、ポリエチレンから形成され、そして例えば、接着剤を使用してバックアッププレート126に固定的に固定される。バックアップ環126は、好ましくは、金属から形成される。あるいは、構築のための他の材料は、プレート126および環128を構築するために使用され得る。切断環126およびバックアッププレート148は、ポスト122の周りにスライド可能に取り付けられる。バックアッププレート126は、一対の内向きに伸長するタブ150を備え、これは、以下にさらに詳細に記載される。
【0027】
アンビルセンターロッドアセンブリ152は、アンビルセンターロッド154、プランジャー156およびプランジャーバネ158を備える。センターロッド154の第1端部は、横方向スルーボア160を備え、このスルーボアは、センターロッド154の中心長手方向軸で半径方向に間隔をあけて配置される。アンビルヘッドアセンブリ120のポスト122はまた、横方向スルーボア162を備える。旋回部材164は、センターロッド154にポスト122を旋回可能に固定して、その結果、アンビルヘッドアセンブリ120が、アンビル中心ヘッドアセンブリ152に旋回可能に取り付けられる。プランジャー156は、センターロッド154の第1端部に形成されるボア154b(図16A)にスライド可能に配置される。プランジャー156は、係合フィンガー168を備え、この係合フィンガーは、アンビルヘッドアセンブリ120の旋回軸からずれており、そしてプランジャーバネ158によるポスト122の基部122aとの係合へと付勢されて、アンビルヘッドアセンブリ120を旋回位置へと押しやる。好ましい位置において、バックアッププレート126に形成されるタブ150は、センターロッド154の上面154a(図16B)を係合して、アンビルヘッドアセンブリ120が旋回部材164の周りで旋回することを妨げる。デバイス10が発射される場合、バックアッププレート126および切断環128は、以下にさらに詳細に記載されるような様式で、ナイフ188(図9)によってポスト122(図16B)の周りのアンビルヘッド124のアンビルレセス134へとより深く移動して、タブ150をセンターロッドア154の上面154aとの係合から離れて移動して、プランジャー156が、専科部材164の周りでアンビルヘッドアセンブリ120を旋回させ得る。
【0028】
センターロッド154の第2端部は、ブラインドボア170(図15B)を備え、このブラインドボアは、内向きにテーパー状の開口170aおよび間隔をあけて配置された管状レセス170bを備える。ブラインドボア170は、除去可能なトロカール157(図15C)を受容するような寸法である。管状レセスは、ブラインドボア170内に配置され、そしてトロカール(図示せず)に形成される管状リブを受容して、トロカールと係合してセンターロッド154を固定するような寸法である。あるいは、トロカール157は、縫合糸157aのみを使用してセンターロッド154内に保持され得る(すなわち、摩擦接触は、トロカール157とセンターロッド154との間に提供される)。これによって、センターロッド154からトロカール157を容易に除去し得る(図15C)。センターロッド154の外側表面は、管状レセス177を規定する管状アバットメント175を備える。管状レセス177は、アンビル保持具38のレッグ70と係合して、アンビルアセンブリ30をアンビル保持具38に解除可能に固定する寸法であれる。ボア179は、センターロッド154を通って横方向に伸長し、そしてトロカールをセンターロッドに固定するための縫合糸を受容するような寸法である。複数のスプライン181aを備えるカラー181は、センターロッド154の周りに固定される。スプライン181aは、アンビルおよびシェルアセンブリを接近させる間、アンビルアセンブリ30をシェルアセンブリ31と整列させるように機能する。
【0029】
(シェルアセンブリ)
図9を参照して、シェルアセンブリ31は、シェル182、プッシャーバック186、円筒形ナイフ188、およびステープルガイド192を備える。シェル182は、外側ハウジング部分194および内側ガイド部分196を備える。外側ハウジング部分194は、遠位円筒形セクション200、中心円錐セクション202および近位小直径円筒形セクション204を有するスルーボア198を規定する。複数の開口206が、円錐セクション202に形成される。開口206は、このデバイスの操作の間、流体および組織の通過を可能にするような寸法である。一対の直径方向で対向する可撓性係合部材207は、シェル182の近位円筒形セクション204上に形成される。係合部材207は、細長本体14の遠位端上に形成される開口209に受容されるように位置づけられて、シェル182を細長本体14に固定する。一対の開口211は、外側チューブ14aの近位端内に形成される。開口211は、固定ハンドル18の内壁に形成される突出部(図示せず)を受容するような寸法であり、ハンドル部分12へのチューブ14aの装着を容易にする。
【0030】
プッシャーバック186は、シェル182の内側ガイド部分196の周りにスライド可能に配置される中心スルーボア208を備える。プッシャーバック186は、遠位円筒形セクション210を備え、この遠位円筒形セクションは、シェル182の遠位円筒形セクション200、中心円錐セクション212および近位小直径円筒形セクション214内でスライド可能に位置づけられる。プッシャーバック186の近位端は、部材220を備え、この部材220は、プッシャーリンク74の弾性フィンガー110とロックして係合するように構成されて、プッシャーリンク74をプッシャーバック186へと締め付けて、その結果、プッシャーリンク74の遠位面が、プッシャーバック186の近位面に接する。
【0031】
プッシャーバック186の遠位端は、プッシャー190を規定する。プッシャー190は、ステープルガイド192に形成されるスロット228内にスライド可能に受容されて、ステープル230をそこから排出するような寸法にされた、様々な遠位伸長フィンガー226を備える。円筒形ナイフ188は、プッシャーバック186の中心スルーボア内に摩擦的に保持されて、プッシャー190に関してナイフ188を固定的に固定する。あるいは、ナイフ188は、接着剤、圧着、ピンなどを使用して、プッシャーバック186内に保持され得る。ナイフ188の遠位端は、円形切断縁部234を備える。
【0032】
操作において、プッシャーリンク74が、発射トリガー20の作動に応答して遠位方向に進められる場合、以下に記載されるように、プッシャーバック186は、シェル182内を遠位方向に進む。プッシャーバック186の進行は、ステープルガイド192のスロット228を通してフィンガー226を進めて、スロット228内に配置されるステープル230を進め、そしてステープルガイド192からステープル230を排出する。ナイフ188がプッシャーバック186に固定されるので、ナイフ188はまた、遠位に、コア組織へと進められ、これは、以下にさらに詳細に記載される。
【0033】
(カム調節機構)
図11〜13を参照して、カム調節部材400は、側壁306aに形成されるレセス306b内で、ネジストップ306の側壁306a上に固定ネジ312によって固定される。カム調節部材400は、スルーボア404を有する円形ディスク402を備える。スルーボア404は、スルーディスク402を通って偏心的に形成され、そして固定ネジ312を受容するような寸法である。より小さなノッチまたはホール406もまた、ディスク402に形成される。ノッチ406は、調節ツール(図示せず)の先端を受容するような寸法である。レセス306b(図11A)は、前ショルダーおよび後ろショルダーまたはアバット表面306cおよび306dをそれぞれ備え、そしてディスク402の外側縁部が前ショルダーおよび後ろショルダー306cおよび306dに接するように、ディスク402を受容する寸法である。
【0034】
上で考察されるように、固定ネジ312は、ディスク402およびネジストップ306を通って伸長し、そしてネジ32を係合して、ネジ32上の軸方向に固定された位置でネジストップ306を固定する。カム調節部材400は、ネジ32上のネジストップ306の軸方向位置を調節するように機能する。より詳細には、固定ネジ312は、ディスク402がネジストップ306のレセス306b内で回転し得るようにゆるめられ得ながら、一方、ネジ32に対して軸方向に固定されたままである。ディスク402がネジ32の周りに偏心的に取り付けられ、レセス306bの前ショルダーおよび後ろショルダー306cおよび306dと係合するので、固定された固定ネジ312の周りでのディスク402の回転は、ネジストップ306をネジ32に沿って軸方向に押しやって、ネジ32上のネジストップ306の軸方向位置を調節する。例えば、ディスク402が矢印「A」によって同定される時計回り方向(図11Dで見える)で回転する場合、ネジストップ306は、ディスク402の外側縁部とレセス306bの後ろショルダー306dとの間の係合に応答して、矢印「B」によって示される方向に、ネジ32に対して、軸方向に移動する。逆に、ディスク402が矢印「C」によって同定される反時計回り方向(図11Cで見える)で回転する場合、ネジストップ306は、ディスク402の外側縁部とレセス306bの前ショルダー306cとの間の係合に応答して、矢印「D」によって示される方向に、ネジ32に関して、軸方向に移動する。
【0035】
ステープルデバイス10が十分に近い位置にある(すなわち、アンビルアセンブリ30およびシェルアセンブリ31が並列に整列されて、組織受容クリアランスを規定する)場合、ネジストップ306は、回転可能スリーブ33の本体部分42に接する。この位置において、アンビルアセンブリ30およびシェルアセンブリ31は、わずかに間隔をあけて配置されて、組織受容クリアランスを規定する。カム調節部材400を提供することによって、組織受容クリアランスは、ネジ32上のネジストップ306の位置を、所望の範囲内に調節することによって選択的に調節され得る。好ましくは、カム調節部材400は、±0.45インチの組織受容クリアランスの調節を可能にするが、より大きなまたはより小さな調節能力もまた想定される。代表的には、組織受容クリアランスの調節は、デバイス製造業者によってなされる。穴(ボア)または開口部(図示せず)は、ハンドル部分12(図1)に提供されて、カム調節部材400へのアクセスを提供し得る。
【0036】
(収縮可能トロカールアセンブリ)
図9および10を参照して、ステープルデバイス10は、アンビル保持具38内にスライド可能に配置される、収縮可能トロカールアセンブリを備える。この収縮可能トロカールアセンブリは、トロカールアセンブリ240および係合部材242を備える。係合部材242は、示されるように、バネクリップの形態であり得る。あるいは、他の係合部材(例えば、バネ装填突出など)が想定される。トロカールアセンブリ240は、トロカール本体240aおよびトロカール先端240bを備える。トロカール本体240aは、トロカール本体240aを通って、その長さの一部に沿って伸長するスロット244を有する。スロット244は、係合部材242を受容するような寸法である。トロカール先端240bは、例えば、ネジ山を使用して、トロカール本体240aに固定される。あるいは、他の締め付け技術を使用して、トロカール先端240bをトロカール本体240aに固定し得る。トロカール先端240aが丸いかまたは鈍く示されるが、他の先端構成が想定される。トロカール先端240bは、トロカールが組織をアンビル保持具38の上で傾けるために組織を通して押される場合、変形する(すなわち、真っ直ぐになる)一対の弾性レッグ240cを備える。レッグ240cを提供することによって、組織は、使用の間、アンビル保持具38上に捕捉される可能性が少ない。
【0037】
図10に示されるように、係合部材242は、近位本体部分246および一対の遠位に伸長する弾性レッグ248を備える。各レッグ248は、テーパー状の先端250および近位に面するショルダー252を備える。ピン254は、それぞれ、部材242の本体部分246およびトロカール240に形成される開口256および258を通して配置されて、トロカール240のスロット244内の係合部材242を固定する。ピン254はまた、アンビル保持具38内に形成される細長スロット255を通って伸長し、その結果、スロット255の遠位表面および近位表面は、ストップとして機能して、収縮可能トロカールアセンブリの完全に進んだ位置および完全に収縮した位置を規定する。レッグ248は、弾性材料(例えば、バネ鋼)から形成される。あるいは、プラスチックを含む他の材料を使用して、係合部材242を形成し得る。非付勢位置において、部材242のレッグ248は、トロカール240のスロット244から外向きにそしてアンビル保持具38の外径を超えて伸長し、その結果、トロカール240の完全に進んだ位置において、レッグ248のショルダー252は、アンビル保持具38の遠位端38aを係合して、トロカール240を進んだ位置で保持する。図19Hおよび図20Gを参照のこと。
【0038】
図20G〜20Kを参照して、アンビルアセンブリ30がアンビル保持具38に装着される場合、アンビルアセンブリ30のアンビルセンターロッド154は、係合部材242のレッグ248のテーパー状先端250の上で、図20Gの矢印「Z」によって示される方向でスライドして、スロット244(図10)の制限へと内向きにレッグ248(図20H)を圧縮し、その結果、トロカール240および部材242は、センターロッド154のブラインドボア170に内側に移動する。アンビルアセンブリ30は、トロカール240の周りで押されるので、トロカール240は、アンビル保持具38内でその伸長位置からその収縮位置へと移動する。図示されるように、ピン254は、スロット255の第1端部255aからスロット255の第2端部255bへと移動する。
【0039】
アンビルアセンブリが、アンビル保持具38から離れる方向にアンビルアセンブリを引くことによって、アンビル保持具38から外される場合、部材242のレッグ248は、外向きに曲がって、部材242のレッグ248のショルダー252を、センターロッド154の管状レセス170bへと移動させる(図20Kを参照のこと)。結果として、アンビルアセンブリ30は、アンビル保持具38から外される場合、係合部材242、従ってトロカール240が、進んだ位置へとトロカール240を移動させるように遠位に引かれる。上で考察されるように、進んだ位置において、係合部材242のショルダー252は、アンビル保持具38の遠位面38aと係合する。
【0040】
トロカール240の近位端は、横方向スロット241(図10)を備える。剛性の可撓性インジケーターリンクまたはワイヤ243は、トロカール240のスロット241内で固定され、そしてプッシャーリンク74のスロット74c(図9)内で細長本体部分14を通って後方に、そしてネジ32のスロット32a(図12)に沿ってステープルデバイス10のハンドル部分12へと延びる。ワイヤ243が、ハンドル部分12内のインジケーターアセンブリに固定される近位端を有し、これは、以下に詳細に考察される。
【0041】
(ロックアウトチューブアセンブリ)
図9および図10に再び戻って、円筒形ロックアウトチューブ270が、アンビル保持具38の外面の周りにスライド可能に位置づけられ、そしてシェル182の内側ガイド部分196およびプッシャーバック186の中心ボア208を通って伸長するように位置づけられる。ロックアウトチューブ270の近位端は、管状フランジ272を備える。円筒形フィッティング273は、プッシャーバック186のボア208の近位端においてロックアウトチューブ270の近位端の周りに固定される。付勢部材187は、フランジ272と係合し、そしてロックアウトチューブ270を、フランジ272がフィッティング273と係合する位置へと遠位に押しやる(図20D)。付勢部材187は、好ましくは、ロックアウトチューブ270のフランジ272とプッシャーリンク74内に形成されるアバットメントとの間で圧縮して位置づけられるねじれバネ(torsion spring)である。
【0042】
ロックアウトチューブ270は、アンビル保持具38の可撓性レッグ70の周りに配置されて、アンビルアセンブリおよびカートリッジアセンブリが近付く間、レッグ70に剛性を提供する。最初に、近付く前に、アンビル保持具38のレッグ70は、ロックアウトチューブ270から突出する。従って、レッグ70は、自由に外向きに曲がって、アンビル保持具38へのアンビルアセンブリ30の装着および脱着を可能にする。近付く間、レッグ70は、アンビルのセンターロッド154の周りでレッグ70をクランプ留めするためにロックアウトチューブ270に引き込まれ、そしてアンビル保持具からアンビルアセンブリが除かれるのを妨げる。アンビル保持具38は、アンビル保持具38のショルダー38bがロックアウトチューブ270の遠位面270aと係合するまで、近付く間、ロックアウトチューブ270に引き込まれる。その後、アンビル保持具38およびロックアウトチューブ270の両方が、プッシャーバック186のボア208内にバネ187の付勢に対して収縮する。
【0043】
(インジケーターアセンブリ)
図7、8、および11〜13を参照して、インジケーターアセンブリは、固定ハンドル18内に取り付けられ、そしてその上に形成される係合部材501および印(indicia)(「図示せず)を有するインジケータープレート500を備える。印は、好ましくは、着色ドットの形態であり、これは、デバイス10が発射準備状態であるか否かを同定する。例えば、緑色ドットは、発射準備位置を示し得、そして赤色ドットは、発射準備位置にないことを示し得る。あるいは、他の形態の印が使用され得、これには、グラフィック印、書かれた印または数字の印が挙げられる。インジケータープレート500は、固定ハンドル18内にスライド可能に配置され、その結果、その印は、インジケーター開口24を通して見ることができる。付勢部材502、好ましくは、コイルバネは、一端において固定ハンドル18の内壁に固定され、そして他端において、インジケータープレート500に固定される。付勢部材502は、張力下で配置されて、インジケータープレート500を、固定ハンドル18内のその最も前の位置に押しやる。
【0044】
保持具スライド506は、ネジストップ306に形成される一対の溝508内にスライド可能に配置され、そして第1アバットメント表面509および第2アバットメント表面510を備える。実質的に剛性のインジケーターリンクまたはワイヤ243は、トロカール本体240aの近位端(図10)から伸長し、そして固定ネジ512によって保持具スライド506に接続される。あるいは、他の締め付け技術が使用され得る。ワイヤ243は、アンビルアセンブリがアンビル保持具38に装着される場合、トロカールアセンブリ240の直線運動を保持具スライド506の直線運動に変換する。従って、アンビルアセンブリ30がアンビル保持具38に装着されて、その進んだ位置からその収縮した位置へとトロカール240を移動させる場合、ワイヤ243は、ネジストップ306(図12)上のその最も前の位置からその最も後ろの位置への保持スライド506の移動をもたらす。
【0045】
上で考察されるように、ネジストップ306は、固定ネジ312によってネジ32に固定される。近付けノブ22がスリーブ30へネジ32を収縮するように回転する場合、ネジストップ306は、スリーブ30へと収縮する。アンビルアセンブリ30がアンビル保持具38に装着され、そしてネジ32が所定の距離収縮した後、第1アバットメント表面509は、インジケータープレート500の係合部材501に接し、その結果、付勢部材502をその最も後ろの位置に押しやることに対して、インジケータープレート500をさらに近くに移動させる。その最も後ろの位置において、プレート500のこの印は、開口24を通して見ることができ、そしてデバイス10が発射準備状態であることを同定する。
【0046】
デバイス10がアンビル保持具38に装着されるアンビルアセンブリ30なしで近付く場合、保持具スライド506は、ネジストップ306上のその最も前の位置のままであり、リテーナースライド506のアバットメント表面509は、デバイスが近付く間、インジケータープレート500の係合部材501と接触する位置になく、そしてインジケーターアセンブルは、発射準備位置にないままであり、そして例えば、開口24を通して示される。
【0047】
(発射ロックアウトアセンブリ)
図8、図14、図17および図18を参照して、トリガーロック26(図1および8)、安全ブラケット520、ロックアウトスリーブ522および圧縮部材523を備える、発射ロックアウトアセンブリが提供される。安全ブラケット520は、前カラー部分524、細長スロット528を有する本体部分526および後ろC型部分530を備える。前カラー部分524は、回転可能スリーブ30の本体部分42の前に隣接して、ネジ32の近位端の周りに配置される。圧縮部材523は、複数のフィン532を備え、これらのフィンは、管状チャネル534を部分的に規定する。C型部分530は、圧縮部材523の管状チャネル534内に配置される。付勢部材536(好ましくは、コイルバネ)は、圧縮部材523の後ろの固定ハンドル18に配置されて、圧縮部材523および安全ブラケット520を、固定ハンドル18内で前に押しやる。
【0048】
トリガーロック26(図8)は、旋回部材540の周りでハンドルセクション18aと18bとの間に旋回可能に支持され、そして旋回部材540に隣接して配置される、一体的に形成されたロッキング部分542を備える。デバイス10が近い位置でない場合、安全ブラケット520の本体部分526は、トリガーロック26のロッキング部分542に隣接するかまたは並置されて位置づけられて、トリガーロック26が、旋回部材540の周りで、そのロッキング位置から旋回することを妨げる(図1)。
【0049】
デバイス10が近付く場合、保持スライド506(図11)は、ネジストップ306とともに、第2アバットメント表面510が安全ブラケット520の前カラー部分524と係合する位置へと移動して、安全ブラケット520を後方に移動させる。安全ブラケット520の後ろ位置において、細長スロット528は、トリガーロック26のロッキング部分542と整列して、トリガーロック26がトリガー20から離れて固定ハンドル18に向かって旋回し得、発射トリガー20の作動を可能にする。
【0050】
アンビルがデバイス10に装着されず、そして保持スライド506がネジストップ306上のその最も前の位置ある場合、第2アバットメント表面510が安全ブラケット520の前カラー部分524と係合する位置なく、ロッキング部分542が、安全ブラケット520の本体526と接し、そしてトリガーロック26がロックが外される位置に旋回しない。
【0051】
ロックアウトスリーブ522は、円筒形部分550、半円筒形本体部分552および前伸長アーム554を備える。可撓性タブ556は、アーム554から下向きに伸長し、そして保持表面556aを備える。駆動部材558がタブ556の一端から下向きに延びる。ロックアウトスリーブ522は、回転可能スリーブ33の周りに配置される。付勢部材560(好ましくは、ねじれネジである)は、ロックアウトスリーブ522を固定ハンドル18内で後方に押しやるように配置される。ロックアウトスリーブ522はまた、側部フィン563を備え、これは、固定ハンドル18内で溝内に受容されて、ロックアウトスリーブ522を直線運動に制限する。
【0052】
ロックアウトスリーブ522が、ステーショナリーハンドル18内に位置づけられる場合、バイアス(biasing)部材560は、回転スリーブ33の本体部分42とロックアウトスリーブ522の円柱状部分550との間で圧縮される。可撓性タブ556の固定表面556aは、表面562をステーショナリーハンドル18内に係合するように位置付けられ(図19C)、その結果、バイアス部材560は、圧縮されて維持される。
【0053】
操作の際、フィンガートリガー20が作動される場合、トリガーアクチュエーター20上に形成された突出部93(図1)は、ドライブ部材558と係合するように移動して、ステーショナリーハンドル18内の表面562から、タブ556の固定表面556aを解放する。これが生じると、スプリング560は、ロックアウトスリーブ522を後方へと動かし、その結果、スリーブ522の一部は、トリガーロック26のロッキング部分542を係合して、トリガーロック26を、ロック解除位置からロック位置へと旋回させる。この発射後のロック位置において、トリガーロック26の遠位端は、アバットメント89とアバットメント91との間の位置に戻って、再び、デバイス10の不慮の発射を防止する。
【0054】
(触覚指標)
図8、8A、8B、および11を参照すると、触覚インジケーター580は、ステーショナリーハンドル18内に位置付けられ、そして収縮位置と伸長位置との間の垂直方向スロット582内に移動可能である。触覚インジケーター580は、隆起部580aを備え、この隆起部580aは、スロット582に形成された2つの凹部582aおよび582bの1つの中に受容されるように構成される。伸長位置において、触覚インジケーター580は、チルトアンビルアセンブリを傾けるのに十分な細長体部分離れた位置(position of unapproximation)で、ネジストップ306上に形成されたウィング584を係合するように位置付けられる。デバイス10を発射する前に、触覚インジケーター580は、凹部582a内に位置付けられた隆起部580aと共に収縮位置にある。デバイス10が発射される場合、発射リンク72上に形成されたアバットメント表面588(図8)は、インジケーター580を係合して、インジケーター580を伸長位置に動かし、その結果、隆起部580aは、凹部582a内に位置付けられる。デバイス10が、アンビルヘッドを旋回させるのに十分な距離に離れている場合、ネジストップ306のウィング584は、インジケーター580を係合して、このような離れた地点に到達したという、可聴指標および/または触覚指標を提供する。その後、外科医は、患者からこのデバイスを取り出し得る。アンビル保持具からアンビルアセンブリを取り出すために、これが患者から取り出された後、外科医は、伸長位置から収縮位置に触覚インジケーター580を進めるのに十分な力を接近ノブ22にさらに提供することにとり、このデバイスをさらに接近させない必要がある。
【0055】
外科用ステープルデバイス10の操作は、本明細書において、図19〜24Fを参照して詳細に記載される。
【0056】
図19〜19Hは、アンビル保持具38へのアンビルアセンブリ30(図1)の取付けの前の、細長体部分離れた位置または開放位置にある外科用ステープルデバイス10を示す。この位置において、ネジストップ306は、カップリング86に隣接して位置づけられ、このカップリング86は、プッシャーリンク74の近位端に固定され、そして保持具スライド506は、ネジストップ306上の最も前方の位置に位置付けられる。プッシャーリンク74は、スプリング106により、収縮位置まで進められる。発射ロックアウトアセンブリのセイフティーブラケット520の本体部分526は、スプリング560により、トリガーロック26の旋回を防ぐ位置まで進められる。図19Cを参照のこと。発射リンク72に固定されたピボット部材79は、バイアス部材82a(図19E)により、垂直方向スロット82の基部に位置付けられる。触覚インジケーター580は、移動止め582a内に位置づけられる隆起部580aと共に収縮位置にある。
【0057】
図19Dおよび図19Hを参照して、上で議論したように、アンビルアセンブリ30のアンビル保持具38への取付けの前に、トロカールアセンブリ240は、アンビル保持具38から外向きに延びるトロカールの先端部240bと共に伸長した位置にある。係合部材のレッグ248のショルダー252は、トロカールアセンブリ240を収縮した位置まで進められることを防ぐために、アンビル保持具38の遠位表面38aにほぼ対向している。
【0058】
図20〜20Fは、アンビル保持具38に固定され、かつ接近していない位置または開放位置にあるアンビルアセンブリ30を有する外科用ステープルデバイス10を示す。図20Dを参照して、アンビルアセンブリ30が、アンビル保持具38に取付けられる場合、アンビルセンターロッド154は、トロカール先端部240bの上に位置付けられ、そしてアンビル保持具38へと押される。このことが起きると、係合部材242のレッグ248は、内向きに圧縮されて、レッグ248のショルダー252を、アンビル保持具の遠位表面38aとの係合から解放する。このことは、アンビル保持具38の可撓性レッグ70の遠位端が、アンビルセンターロッド154の輪状凹部177内に受容されるまで、センターロッド154をアンビル保持具38へと挿入することを可能にする。このことが起きると、トロカールアセンブリ240は、アンビル保持具38中のスロット255の近位端に位置付けられたピン254と共に収縮位置まで、移動される。
【0059】
トロカールアセンブリが、収縮位置まで移動される場合、インジケーターリンクまたはワイヤ243(図11および12)は、保持具506を、ネジストップ306上の最も前方の位置から、最も後方の位置に移動する。最も後方の位置では、デバイス10の接近の際、保持具スライド506の第1のアバットメント表面509は、インジケータープレート500の部材501を係合し、そしてアバットメント表面510は、セイフティーブラケット520の前方のカラー部分524を係合する。デバイス10の残りの構成要素は、アンビルアセンブリ30のアンビル保持具38への取付けによる影響を受けない。
【0060】
図21〜21Gは、接近した位置においてアンビル保持具38に取付けられたアンビルアセンブリ30を有する外科用ステープルデバイス10を示す。上で議論したように、アンビルアセンブリ30は、回転ノブ22を回転することにより、図20に示される接近していない位置から、接近した位置に移動される。ノブ22の回転は、ネジ32の螺旋チャネル50内のピン52を回転する円柱状スリーブ33の回転を生じる。スリーブ33は、軸方向に固定されるので、螺旋チャネル50内のピン52の移動は、中空スリーブ33へのネジ32の直線的収縮を生じる。ネジ32の遠位端は、ネジエキステンション34および36に接続される。このネジエキステンション34および36は、遠位端で、アンビル保持具38に固定され、ネジ32のこのような直線的な移動は、アンビル保持具38およびアンビルアセンブリ30の直線的移動に変わる。
【0061】
ネジストップ306は、ネジ312を配置することにより、ネジ32に固定される。従って、デバイス10の接近の間に、ネジストップ306は、ハンドル18内の前方の位置(図20)から、ハンドル18内の後方の位置(図21)に移動される。ネジストップ306が、その最も前方の位置からその最も後方の位置に移動されるので、保持具スライド506上の第1のアバットメント部材509は、インジケータープレート500の部材501に係合され、そして保持具スライド506上のアバットメント部材510は、セイフティーブラケット520のカラー部分524を係合して、スプリング502のバイアスに対して、インジケータープレート500、およびスプリング536のバイアスに対して、セイフティーブラケット520をハンドル18内の後方へと移動させる。後方へのインジケータープレート500の移動は、インジケーター開口部24の下の発射準備完了の印に位置を合わせる。セイフティーブラケット520の後方への移動は、セイフティーブラケット520の本体526内の細長いスロット528を、トリガーロック26のロック位置542並べ、その結果、このトリガーロック26は、ロック解除位置へと自由に旋回する。
【0062】
ネジストップ306の最も後方の位置において、ネジストップ306の基部に形成され(図11A)、そして実質的に凹表面を備える、アバットメント表面307が、発射リンク72のピボット部材79を受容および係合するように位置付けられることもまた注目される。
【0063】
図22〜22Dは、発射トリガー20の発射工程(ストローク)の間の外科用ステープルデバイス10を示す。トリガー20が、ステーショナリーハンドル18に向かって圧縮される場合、ピボット部材79は、ネジストップ306上のアバットメント表面307を係合し、そして発射トリガー20が、遠位方向に押される。上で議論したように、発射トリガー22の遠位端は、カップリング部材86を介して、プッシャーリンク74の近位端に接続される。従って、発射トリガー20が、遠位方向に移動される場合、プッシャーリンク74は、遠位方向に移動されて、シェルアセンブリ31内のプッシャーバック186の前進をもたらす。プッシャーバック186のフィンガー190は、ステープル230を係合し、そしてステープルガイド192からステープル230を射出する。
【0064】
円柱状のナイフ188は、プッシャーバック186と同時に移動され、その結果、このナイフ188は、カッティングリング128とバックアッププレート126との係合部へと移動する。上で議論したように、カッティングリング128は、好ましくは、ポリエチレンから形成され、そしてバックアッププレート126は、好ましくは、金属から形成される。ナイフ188がカッティングリング128を係合する場合、ナイフ188は、カッティングリング128を切り開き、そしてプッシャーバックアッププレート126を、アンビルヘッド124へと深く押し込んで、センターロッド154の頂部表面154a(図16B)との係合部から、タブ150を移動させる。ここで、アンビルヘッド124は、部材164の周りを自由に旋回し、そしてプランジャー156により行われるように進められる(図24F)。アンビルアセンブリは、シェルアセンブリ31と並列して整列するので、このアンビルヘッド14は、このアンビルアセンブリおよびシェルアセンブリが、このアンビルヘッドを完全に旋回させるのに十分な距離に離れるまで、完全に旋回しないことが注目される。
【0065】
図22Cに示されるように、発射トリガー20上の突出部93は、ロックアウトスリーブ522のドライブ部材558と整列される。発射トリガー20が、完全に作動される場合、突出部93は、ドライブ部材588を、偏向タブ556に上向きに係合して、保持具表面556aを、ステーショナリーハンドル18の内壁の表面562から解放する。これが生じる場合、圧縮状態にあるスプリング560は、ハンドル18内のロックアウトスリーブ522を下向きに駆動し、その結果、スリーブ522の一部は、トリガーロック26のロック部分542を係合して、このトリガーロック26を、ロック解除位置(図22C)からロック位置(図23)へと旋回させる。ロック位置において、トリガーロック26の遠位端は、アバットメント89とアバットメント91との間に位置付けられる。
【0066】
発射トリガー20の作動中に、発射リンク72上のエキステンション589は、触覚インジケーター580を係合し、そして触覚インジケーター580を、収縮位置から伸長位置に移動する。伸長位置において、インジケーター580は、アンビルアセンブリおよびシェルアセンブリが離れる間に、ネジストップ306のウィング584を係合するように位置付けられる(図22F)。
【0067】
図22〜23Gは、発射トリガー20が、解放された後の、外科用ステープルデバイス10を示す。図示されるように、バイアス部材106は、プッシャーリンク74を、収縮位置の近くに進め、そしてトリガーロック26は、ロックアウトスリーブ522により、上で議論した様式でロック位置に移動される。図23Dに示されるように、プッシャーバック186は、プッシャーリンク74の移動に応答して、その収縮位置の近くまで移動される。アンビルヘッド124は、旋回を始めるが、シェルアセンブリ31によるさらなる旋回は防止される。
【0068】
図24〜24Hは、発射され、そして離れた後の、外科用ステープルデバイス10を示す。図示されるように、アンビルヘッド124は、プランジャー156により、旋回位置まで移動される(図24Eおよび24F)。ネジストップ306は、セイフティーブラケット520に隣接する最も後方の位置から、プッシャーリンク74の近位端に隣接する最も前方の位置まで進めされる。ネジストップ306上に保持される、保持具スライド506は、前方の位置にネジストップ306と共に移動される。保持具スライド506が前方に移動する場合、スプリング502は、インジケータープレート500を、最も前方の位置に戻し、そしてスプリング536は、セイフティーブラケット520を、最も前方の位置に戻す。このように、インジケータープレート500は、再度、デバイスを、発射準備が出来ていない状態として識別し、そしてセイフティーブラケット520は、トリガーロック520の移動を妨げる位置まで移動する。
【0069】
図24Gおよび24Hを参照して、ネジストップ306が、ステーショナリーハンドル18内の最も後方の位置(図23)から最も前方の位置に移動される。ネジストップ306のウィング584は、離れた地点で触覚インジケーター580を係合する。この地点で、アンビルヘッド124は旋回する(図24F)。ネジストップ306と触覚インジケーター580との間のこの接触は、外科医に、アンビルヘッド124が傾き、そしてデバイスが患者から取り出されるという、触覚指標および/または可聴指標を提供する。接近ノブ22に対してさらなる力を提供することにより、ネジストップ306のウィング584は、触覚インジケーター580を、その収縮位置に戻して、デバイス10を完全に離すことを可能にすることが注目される。
【0070】
図25〜29は、概して610として示される、本発明の開示される外科用ステープルデバイスの別の好ましい実施形態を示す。簡単には、外科用ステープルデバイス610は、近位ハンドル部分612、湾曲した細長い外部チューブ614aおよび遠位ヘッド部分616を備える細長い本体中央部分614を備える。
【0071】
ハンドル部分612は、ステーショナリーハンドル618、発射トリガーアセンブリ620、回転可能な接近ノブ622、およびインジケーターウィンドウ624を備える。ステーショナリーハンドル618は、好ましくは、熱可塑性樹脂(例えば、ポリカーボネート)ハンドルセクションから形成され、これは、共に、ハンドル部分612の内部構成要素のためのハウジングを規定する。これらの内部構成要素は、以下で詳細に議論される。ピボット式で取付けられたトリガーロック626は、ハンドル部分612に固定され、そしてステープルデバイス610の不慮の発射を防ぐように手動で位置決めされる。インジケーターウィンドウ624は、ステープルデバイスの多数の操作位置を識別する、内部に位置付けられたインジケーターを見ることを容易にする、開口部または半透明の表面628を定義する。
【0072】
ヘッド部分616は、アンビルアセンブリ630およびシェルアセンブリ631を備える。これらのアセンブリの各々は、以下で詳細に議論される。他で述べない限り、外科用デバイス610の構成要素は、ポリカーボネートを含む熱可塑性樹脂、およびステンレス鋼およびアルミニウムを含む金属から形成される。特定の構成要素を形成するように選択された特定の金属は、特定の構成要素の強度の要求に依存する。例えば、アンビルは、ステンレス鋼のような金属から形成され、そしてステーショナリーハンドルは、ポリカーボネートのような熱可塑性樹脂から形成される。あるいは、材料が外科用途に適切であり、そして特定の構成要素の強度の要求を満たす場合、上記に列挙されていない他の材料を用いて、ステープルデバイス610の構成要素を形成し得る。
【0073】
図30は、ハンドル部分612の内部構成要素を曝露するように取り外されたステーショナリーハンドル618のセクションと共に、外科用ステープルデバイス610のハンドル部分612を示す。ハンドル部分612は、インジケーター機構および接近機構および発射機構の近位の構成要素を収容する。これらの機構の各々は、本明細書中の以下に詳細に記載される。クッションノンスリップグリップ619は、ステーショナリーハンドル612に固定される。グリップ619は、ゴムまたはネオプレンから形成され得、そしてオーバーモールド(overmolding)プロセスを用いてステーショナリーハンドル18に固定される。あるいは、本明細書中で言及されていない他の材料および装着方法が用いられ得る。
【0074】
図30〜36を参照して、接近機構は、接近ノブ622、回転可能なスリーブ633、ネジ632、第1および第2のネジエキステンション、それぞれ、634および636、ならびにアンビル保持具638を備える(図34)。回転可能なスリーブ633は、小さな直径の円柱状の中空の本体部分640、および大きな直径の中空の本体部分642を備える。本体部分642は、ステーショナリーハンドル618の内壁上に形成された、内側方向に延びる輪状フランジ646を受容するような寸法の輪状の溝644を備える。溝644とフランジ646との間の係合は、ステーショナリーハンドル618内のスリーブ633を軸方向に固定するが、相対的な回転を許容する。回転可能なスリーブ633の本体部分640の近位端は、ステーショナリーハンドル618の近位端に形成された開口部を通じて延び、そして平坦な表面648を備える。接近ノブ622は、スリーブ633の近位端を受容するように構成された穿孔649を備え、その結果、ノブ622の回転は、同時に、スリーブ633の回転を生じる。
【0075】
ネジ632は、回転可能なスリーブ633内にスライド式に位置付けられる寸法にされる。螺旋チャネル650は、ネジ632の近位端に形成される。ピン652は、スリーブ633の本体部分642を通じて、螺旋チャネル650へと放射状に延びる。スリーブ633は、ステーショナリーハンドル618に対して軸方向に固定されるので、ネジ632の周りのスリーブ633の回転は、ピン652をネジ632のチャネル650に沿って動かして、ステーショナリーハンドル618内でのネジ632の軸方向の移動を生じる。
【0076】
ネジ632の遠位端は、頂部の平坦な表面および底部の平坦な表面ならびに通し穿孔(throughbore)656を有するエキステンション654を備える。頂部および底部のネジエキステンション634および636は、各々、可撓性フラットバンド部分658および遠位半円柱状部分660を備える。頂部および底部のネジエキステンション634および636の可撓性は、湾曲した細長い本体部分614を介する、ネジエキステンション634および636の移動を容易にする。各々のバンド部分658の近位端は、ネジエキステンション634および636の近位端を、通し穿孔656を介してネジ632のエキステンション654に固定するためのピン664を受容するような寸法の開口部662を備える。ネジエキステンション634および636の各々の半円柱状の部分660は、外向きに延びる突出部666を備える。頂部および底部のネジエキステンション634および636が、並列に整列して位置付けらる場合、ネジエキステンション634および636の半円筒状の部分660は、共に、アンビル保持具638の近位端内に受容されるような寸法である円柱状部材を規定する。突出部666は、アンビル保持具638をネジエキステンション634および636の遠位端に固定するために、アンビル保持具638の近位端に形成された開口部668に受容されるような寸法である。アンビル保持具638の遠位端は、複数の可撓性レッグ670を備え、このレッグ670は、以下でさらに詳細に議論されるように、アンビルアセンブリを受容および係合ために、外向きに収縮するように構成される。
【0077】
操作において、接近ノブ622が手動で回転される場合、回転可能なスリーブ633は、ネジ632の近位端の周りで回転されて、ピン652をネジ632のチャネル650に沿って動かす。スリーブ630が、ピン652がチャネル650を通じて動かせるように、ステーショナリーハンドル618に対して軸方向に固定されるので、ネジ632は、ステーショナリーハンドル618内に進められるかまたは収縮される。結果として、ネジ632の遠位端に固定される頂部および底部のネジエキステンション634および636、ならびにネジエキステンション634および636の遠位端に固定される、アンビル保持具638は、細長い本体部分614内で軸方向に移動される。アンビルアセンブリ630は、アンビル保持具638の遠位端に固定されるので、接近ノブ622の回転は、間隔をあけた位置と接近位置との間で、シェルアセンブリ631に関連したアンビルアセンブリ630の移動を生じる。
【0078】
図30〜35を再度参照して、発射機構は、発射トリガー620、発射リンク672、および細長いプッシャーリンク674を備える。発射トリガー620は、1対のトリガープレート676および678、トリガーカバー680、ならびにクッションを備えるグリップ部材682を備える。図39および40もまた参照のこと。グリップ部材682は、好ましくは、ゴムまたはネオプレンから形成され、そしてトリガーカバー680上にオーバーモールドされる。あるいは、他のクッションを備えるノンスリップグリップ材料が用いられ得、そして任意の公知の技術(例えば、接着剤)を用いてトリガーカバーに固定され得る。トリガープレート676および678の各々の遠位端は、それぞれ、ピボット部材684を受容するための穴を有する、ヒンジ部分676aおよび678aを備える。ピボット部材684は、ヒンジ部分676aと676bとの間で、プッシャーリンク674の近位端に固定されたコネクタ686中に形成された穿孔677を通って延びて、発射トリガー620の遠位端をプッシャーリンク674の近位端にピボット式で固定するような寸法にされる。あるいは、コネクタ686は、プッシャーリンク674と一体に形成され得る。各々のトリガープレート676および678の頂部表面は、デバイス610の不慮の発射を防ぐためのロッキングピン693を受容するような寸法のノッチ683を備える。
【0079】
発射リンク672は、スペーサー672cにより相互連結された右側リンク部分672aおよび左側リンク部分672bを備える(図31A)。各リンク部分は、その各々の末端にピボット開口部688、および中央に位置付けられた細長いスロット690を備える。リンク部分672aと672bとの間の空間は、セイフティーリンク692を受容するような寸法にされる。セイフティーリンク692の機能および操作は、以下に詳細に記載される。発射リンク672の一方の末端694は、ピボット部材696の周りの、トリガープレート676および678中の開口部679(図40)の間でピボット式に連結される。発射リンク672の他方の末端698は、ピボット部材700の周りのステーショナリーハンドル618にピボット式に連結される。ピボット部材700は、ステーショナリーハンドル618の内壁に沿って形成された垂直方向のポケット702(一方のみを示す)中に支持される。ピボット部材696および700は、ピン、発射リンク672上に形成された一体型のナブ、または所望の機能を提供する任意の他の構造として形成され得る。
【0080】
セイフティーリンク692は、本体部分の一方の末端に形成されたガイド部材692b、および本体部分の反対の末端に形成された穿孔692cを有する本体部分692aを備える。穿孔692cは、ロックピン693を受容するような寸法にされる。セイフティーリンク692は、発射リンク672の右側のリンク部分672aと左側のリンク部分672bとの間に位置付けられる。ロックピン693は、発射リンク672のスロット690中にスライド式に位置付けられ、そしてガイド部材692bは、ステーショナリーハンドル618の内壁に沿って形成された水平方向スロット695中にスライド式に位置付けられる。バイアス部材(例えば、コイルスプリング697)は、発射リンク672の末端694とセイフティーリンク692の中央部分との間に固定されて、
フランジリンク672の末端694に向かってセイフティーリンク692を偏らせる。発射リンクの本体部分692aは、弱い部分699を備える。弱い部分699の目的は、以下に詳細に記載される。
【0081】
細長いプッシャーリンク674は、その近位端の周りに、コネクタ686の遠位に位置付けられたフランジ704を備える。ステーショナリーハンドル618の前方末端とフランジ704との間に位置付けれた、スプリング706は、プッシャーリンク674を、収縮した発射しない位置に偏らせる。1対のウィング708は、プッシャーリンク674の近位端から外向きに放射状に延びる。ウィング708は、ステーショナリーハンドル618の内壁に沿って形成されたスロット710に沿ってスライドし、デバイス610の発射の間にステーショナリーハンドル618内のプッシャーリンク674の適切な整列を維持するような寸法にされる。プッシャーリンク674の遠位端は、1対の可撓性アーム710を備え、このアーム710は、プッシャーバック786の近位端に形成されたスロット820(図50)を通じて延びるような寸法にされる。プッシャーバック786は、シェルアセンブリ631の部分を形成し、そして以下でさらに詳細に議論される。プッシャーリンク674は、好ましくは、可撓性プラスチック材料から形成され、そして、本体614を通って移動する場合に、プッシャーリンクをより容易に曲げることを可能にする、複数のノッチ787を備える。輪状チャネル674aは、oリングシール674bを受容するように、プッシャーリンク674の周りに形成される。デバイスの発射機構の操作は、以下に詳細に記載される。
【0082】
上で議論されるように、ヘッド部分616は、アンビルアセンブリ630およびシェルアセンブリ631を備える。図41〜46を参照して、アンビルアセンブリ630は、アンビルヘッドアセンブリ720およびアンビルセンターロッドアセンブリ752を備える。アンビルヘッドアセンブリ720は、ポスト722、アンビルヘッド724、バックアッププレート726、カッティングリング728、およびアンビル729を備える。アンビルヘッド724は、ポスト722、内部輪状リング734、および外部輪状リング736を受容するような寸法の中央穴732を備える。アンビル729は、輪状リング734と736との間に規定された輪状チャネル738中のアンビルヘッド724上で支持される。アンビル729は、ステープルを受容および変形するための複数のポケット740を備える。アンビル729上に形成されたタブ742は、アンビルヘッド724中に形成されたスロット744中に受容されるような寸法にされ、アンビル729とアンビルヘッド724の適切な整列を維持する。カッティングリング724およびバックアッププレート726は、各々、中央開口部を備え、そして中央の穴732と輪状リング734との間に規定された輪状チャネル746中で重なった関係で、ポスト722の周りに位置付けられる。好ましくは、カッティングリング724は、ポリエチレンから形成され、そして例えば、接着剤を用いて、バックアッププレート726に固定される。カッティングリング724は、バックアッププレート726上に形成されたタブ750を受容するような寸法の1対の直径方向に対向するスロット748を備える。カッティングリング726およびバックアッププレート748アセンブリは、ポスト722の周りにスライド式に固定される。
【0083】
アンビルセンターロッドアセンブリ752は、アンビルセンターロッド754、プランジャー756およびプランジャースプリング758を備える。センターロッド754の第1の末端は、センターロッド754の中心の長手方向の軸から放射状に空間を空けられている、横軸方向の通し穿孔760を備える(図44)。アンビルヘッドアセンブリ720のポスト722もまた、横軸方向の通し穿孔762を備える。ピボット部材764は、ポスト722をセンターロッド754に対してピボット式に固定し、その結果、アンビルヘッドアセンブリ720は、アンビルセンターロッドアセンブリ752に対してピボット式に取り付けられる。図45および46において最もよく見られるように、プランジャー756は、センターロッド754の第1の末端中に形成された穿孔766中にスライド式に位置付けられる。プランジャー756は、係合フィンガー768を備え、この係合フィンガー768は、アンビルヘッドアセンブリ720の旋回軸からオフセットされ、そしてプランジャースプリング758によって、ポスト722の基部との係合部へと偏らされて、アンビルヘッドアセンブリ720を旋回位置へと進める。好ましい位置では、バックアッププレート726上に形成されたタブ750は、センターロッド754の頂部表面754aを係合して、アンビルヘッドアセンブリ720の旋回を防ぐ(図63および64を参照のこと)。デバイス610が発射される場合、バックアッププレート726およびカッティングリング728は、ナイフ788により、ポスト722の周りのアンビルヘッド724へとより深く移動され、センターロッド754の頂部表面754aとの係合から外れるようにタブ750を移動して、プランジャー756がピボット部材764の周りでアンビルヘッドアセンブリ720を旋回可能にする。図66〜68を参照のこと。図68に示されるように、センターロッド754の上部末端754bは、さらに、組織標本を収容するように角度を付けられる。このデバイスが発射された後に、アンビルは、アンビルアセンブリおよびシェルアセンブリが所定の距離に離れた後にのみ、傾いた位置に動くことが注目される。
【0084】
センターロッド754の第二末端は、ブラインドボア770を備える(図45および46)。ブラインドボア770は、内部方向にテーパー付けされた開口部772および空間が開けられた輪状レセス774を備える。ブラインドボア770は、取り外し可能なトロカール776を受容するような寸法にされる。輪状レセス774は、ブラインドボア770内に配置され、そしてトロカール776上に形成された輪状リブ778を受容するような寸法にされ、トロカール776との係合してセンターロッド754を固定する。このセンターロッド754の外部表面はまた、輪状アバットメント775を備える。輪状アバットメント775は、アンビル保持具638の遠位端に形成された輪状レセス777内に受容されるような寸法にされ、アンビル保持具638内でアンビルアセンブリ630を保持する。
【0085】
図34および50を参照すると、シェルアセンブリ631は、シェル782、スリーブ784、プッシャーバック786、円筒形ナイフ788、プッシャー790およびステープルガイド792を備える。シェル782は、外部ハウジング部分794および内部ガイド部分796を備える。スリーブ784は、シェル796の内部ガイド部分782内に固定的に配置され、そしてステップボア785を規定する。移動止め789(図34A)を有するロック部材787は、ステップボア785内に保持される。外部ハウジング部分794は、遠位円筒形セクション800、中心円錐形セクション802および近位小直径円筒形セクション804を有する、スルーボア798を規定する。複数の開口部806は、円錐形セクション802に形成される。開口部806は、デバイスの操作の間に、流体および組織の通過を可能にする寸法にされる。一対の正反対の可撓性係合部材807は、シェル782の近位円筒形セクション804上に形成される。係合部材807は、係合した本体614の遠位端上に形成された開口部809に受容されるように配置され、シェル782を係合した本体614に固定する。一対の開口部811は、外部チューブ614aの近位端に形成される。開口部811は、定常ハンドル618の内部壁上に形成される突出部(示さず)を受容する寸法にされ、チューブ614aをハンドル部分612に装着するのを容易にする。
【0086】
プッシャーバック786は、中心スルーボア808を備え、このスルーボアは、シェル782の内部ガイド部分796の周りにスライド可能に配置される。プッシャーバック786は、遠位円筒形セクション810を備え、この遠位円筒形セクションは、シェル782の遠位円筒形セクション800、中心円錐形セクション812および近位小直径円筒形セクション814内にスライド可能に配置される。プッシャーバック786の遠位面は、内部輪状ショルダー816および外部輪状レセス818を備える。プッシャーバック786の近位端は、プッシャーリンク674の可撓性アーム710を受容するように構成された一対のスロット820を備え、プッシャーリンク674をプッシャーバック786に留めて、プッシャーリンク674の遠位面がプッシャーバック786の近位面に隣接させる(図53を参照のこと)。
【0087】
プッシャー790は、ステープルガイド792からステープル830を発射するために、近位伸長リング824を有する本体822およびステープルガイド792に形成されたスロット828内にスライド可能に受容されるような寸法にされた多数の遠位伸長フィンガー826を備える。リング824は、プッシャーバック786の遠位面に形成された輪状レセス818内に受容されるような寸法にされ、プッシャー790をプッシャーバック786に固定する。円筒形ナイフ788は、その近位端の周りに形成された複数の半径方向伸長タブ832を備え、プッシャーバック786の遠位面とプッシャー790の本体822との間に配置されたタブ832を備えるバッキング786の輪状ショルダー816内に配置され、プッシャー790に対してナイフ788を固定する。ナイフ788の遠位端は、輪状カッティングエッジ834を備える。
【0088】
操作において、プッシャーリンク674が、以下に記載されるように、トリガー620を引く操作に応答して遠位方向に進められ、プッシャーバック786は、シェル782内で遠位に進められる。プッシャーバック786の前進は、プッシャー790およびナイフ788の前進をもたらす。プッシャー790が進められる場合、フィンガー826は、ステープルガイド792のスロット828内に配置されるステープル830と係合し、ステープル830をステープルガイド192から発射させる。
【0089】
図34、36、51および52を参照すると、ステープルデバイス610は、アンビル保持具638内にスライド可能に配置された収縮可能トロカールアセンブリを備える。収縮可能トロカールアセンブリは、トロカール840および係合部材842を備える。係合部材842は、示されるように、バネクリップの形態であり得る。あるいは、他の係合部材(例えば、スプリング充填突出部など)が想定される。トロカール840は、その長さの一部に沿ってトロカールの本体840を通って延びるスロット844を備える。スロット844は、係合部材842を受容する寸法にされる。係合部材842は、近位本体部分846および一対の遠位伸長弾力性脚部848を備える。各脚部848は、テーパー付けされた先端850および近位で面するショルダー852を備える。ピン854は、それぞれ、部材842およびトロカール840の本体部分846に形成された開口部856および858を介して配置され、係合部材842をトロカール840のスロット844内に固定する。ピン854はまた、アンビル保持具638に形成された細長スロット855を通って延び、スロット855の遠位表面および近位表面がストップとして機能し、収縮可能アンビルアセンブリの完全に進み、かつ、完全に収縮した位置を規定する。脚部848は、ばね鋼のような弾性材料から形成される。付勢されていない位置において、部材842の脚部848は、トロカール840およびアンビル保持具638の外側に延び、トロカール840の完全に進んだ位置において、脚部848のショルダー852が、アンビル保持具638の遠位端と係合し、この進んだ位置でトロカール840を固定する(図51を参照のこと)。
【0090】
図53を参照すると、アンビルアセンブリ630がアンビル保持具638に装着される場合、アンビルアセンブリ630のアンビルセンターロッド754は、脚部848のテーパー付けされた先端852上をスライドし、矢印「A」によって示された方向に向かって内側に脚部848を圧縮し、トロカール840および部材842がセンターロッド754のブラインドボア770内部で移動する。トロカール840の先端がボア770の底部と係合する場合、矢印「B」によって示される方向に、アンビル保持具638に向けられたセンターロッド754のさらなる移動は、トロカールアセンブリを、アンビル保持具638内の収縮された位置に移動させる。
【0091】
図53Aを参照すると、アンビルアセンブリが矢印「C」によって示される方向に向かってアンビルアセンブリを引くことによって、アンビル保持具638から開放さる場合、脚部848は外向きに曲がって、部材842の脚部848のショルダー852をセンターロッド754の輪状レセス774の方に移動させる。結果として、アンビルアセンブリ630は、アンビル保持具638から開放されるので、従って部材842およびトロカール840は、図57に示されるように、アンビルアセンブリを用いて矢印「D」によって示される方向に向かって進められた位置まで遠位方向に引かれる。
【0092】
トロカール840の近位端は、ブラインドボア841を備える。強固な可撓性ワイヤ843は、トロカール840のボア841内に固定される遠位端を有し、そして細長本体部分614を通って、ステープルデバイス610のハンドル部分612に向かって後方に延びる。ワイヤ843は、以下で詳細に議論されるハンドル部分612で標識アセンブリに固定される近位端を有する。
【0093】
図34、36、51および52をさらに参照すると、円筒形ロックアウトチューブ870は、アンビル保持具638の外部表面の周りにスライド可能に配置され、そしてシェル782の内部ガイド部分796、スリーブ784およびシェルアセンブリ631のロック部材787を通って延びるように配置される。ロックアウトチューブ870の近位端は、輪状突出部872を備える(図34)。シェルアセンブリ631のスリーブ784内に固定的に配置される、ロック部材787は、輪状突出部872を摩擦により受容する寸法にされた移動止め789を備え(図34A)、予め決められた力がロックアウトチューブ870上に及ぼされるまで、アンビル保持具638の周りでロックアウトチューブ870のスライド移動を防止する。ロックアウトチューブ870は、アンビルの近接の間に、脚部670に剛性を与えるためにアンビル保持具638の可撓性脚部670の周りに配置され、アンビルアセンブリ630が、アンビル保持具638から不利に脱着されるのを防止する。円筒形ロックアウトチューブ870のアンビル保持具の周りでの移動は、以下により詳細に議論される。
【0094】
図33、35、37、38A、および69〜72を参照すると、インジケーターアセンブリが、定常ハンドル618内に装着され、そして標識901a、901bおよび901cを有する表示900を備え、アンビルアセンブリが装着されていないか(901a)、アンビルアセンブリが装着されているか(901b)、またはアンビルアセンブリが装着および近接されているか(901c)(すなわち、このデバイスが既に発射されている)の表示ウインドウ624を介して外科医に視覚的表示を提供する。この表示901a〜cは、赤色、黄色、および緑色をそれぞれ含み得る。あるいは、他の色コードグラフィック、または書き込み標識を使用して、上記のデバイス状態を示し得る。
【0095】
インジケーターアセンブリは、表示900、インジケーターサブプレート902、表示アーム904、ネジストップ906および回転可能ディスク908を備える。ネジストップ906は、ネジ632の周りに配置されるような寸法にされたスルーボア910を備える。セットネジ912を使用して、ネジストップ906をネジ632に固定する。ディスク908は、中心スルーボア914、上方伸長カム部材916およびワイヤコネクター918を備える。ディスク908は、ネジ920によってネジストップ906の頂部に回転可能に固定される。ワイヤコネクター918は、ディスク908内の開口部924を通って延び、そしてDクリップ926などによってその中に回転可能に固定される、ポスト922を備える。ワイヤコネクター918は、ワイヤ843の一方の端部を受容するためのボア928を備える。ピン930は、ワイヤ843をワイヤコネクター918に固定し、上記のように、ワイヤ843が、アンビル保持具638上へのまたはこのアンビル保持具からのアンビルアセンブリ630の装着または脱着に応答して、進められるかまたは収縮される場合、カム部材916を回転させるために、ディスク908はネジ920の周りで回転する。
【0096】
インジケーターサブプレート902は、定常ハンドル618の内部壁に形成されたサブプレート902およびチャネル(示さず)に形成されるノッチ934を介して、定常ハンドル618の内部壁間で固定される。細長チャネル936上で規定する中心に配置されたカットアウト932は、サブプレート902に形成される。表示アーム904はまた、第一端937aおよび第二端937bを有する、カットアウト937を備える。細長チャネル936にスライド可能および回転可能に配置される突出部938は、サブプレート902中の表示アーム900から下方向に延びる。突出部940は、表示アーム904の頂部表面から、表示900の底部に形成された湾曲ボア941に延びる。突出部943は、表示900から下方向に延び、そして表示900をサブプレート902に回転可能に固定するために、サブプレート902のチャネル936に配置される。表示900の底部はまた、ディスク908のカム部材916を受容するためのカムスロット942を備える。
【0097】
このアセンブル状態において、インジケーターサブプレート902は、定常ハンドル618内に固定され、表示アーム904および表示900は、その上にスライド可能かつ回転可能に取り付けられ、表示900の湾曲ボア941は、表示アーム904の突出部940上に配置される。この全アセンブリは、表示ウインドウ624によって構築された状態で係合および保持される。カム部材916は、ディスク908から上向きに、サブプレート902中のチャネル936および表示アーム904中のカットアウト937を通って、表示900の底部に形成されたカムスロット942に向けて延びる。インジケーターサブプレート902と表示アーム904との間で支持されたバネ952は、表示アーム904を表示900を支持するサブプレート902の末端に向けて付勢する。図73〜75をまた参照すると、アンビルアセンブリ630をアンビル保持具638に装着する前に、標識901a(例えば、赤色ドット)が、表示ウインドウ624の開口部628の下に配置される(図73)。アンビルアセンブリ630が上記の様式でアンビル保持具638に装着される場合、トロカール840は、ワイヤ843を近位に移動させるためにアンビル保持具638内に収縮される(すなわち、近位に押出される)。ワイヤ843は、ディスク908の底部に固定されるコネクター918に固定される。ワイヤ843が近位に移動される場合、ディスク908は、ネジ920の回りのネジストップ906上で矢印「E」によって示される方向に向けて回転され、同一方向で表示900の底部に形成されたカムスロット942内に配置されるカム部材916を移動させる(図25)。カムスロット942に対するカム部材916の移動は、表示900を、突出部943の周りで矢印「F」によって示される方向に向かって回転させ、表示ウインドウ64の開口部628の下の標識901b(例えば、黄色のドット)を移動させる。カム部材916はまた、カットアウト937の第一末端937a付近の表示アーム904のカットアウト937と係合し、突出部938の周りで矢印「G」によって示される方向に図74に示される位置までアーム904を回転させる。上で議論されるように、標識901bは、アンビルがアンビル保持具に装着されるように外科医に表示する。
【0098】
次に、外科医がデバイスに近接する場合、ネジ632は、上記の様式で、近位に移動される。従って、ネジストップ906(これは、ネジ632上に取り付けられる)、およびディスク908(これは、カム部材916を備える)は、近位に移動される。カム部材916が近位に移動される場合、カム部材916は、表示900中のカムスロット942の外側に移動し、そして標識アーム904に形成されたカットアウト937の第一末端937aからカットアウト937の第二末端937bに移動する。カム部材916がカットアウト937の第二末端937bに到達する場合、カム部材916は、バネ952の付勢に対して、表示アーム904および薬物表示アーム904の壁905と近位で係合する。表示アーム904は、矢印「H」によって示される方向に向けて近位に移動され、表示900をまた近位に移動させて、表示ウインドウ624の開口部628の下に標識901c(例えば、緑色の光)を移動させる。上で議論されるように、標識901cは、アンビル保持具638に装着され、そして近接されたアンビルアセンブリ(すなわち、装置)が容易に発射されることを外科医に示す。
【0099】
外科用ステープルデバイス610の操作が、ここで、詳細に議論される。
【0100】
図47〜51は、非近接位置で、アンビル保持具638に装着されたアンビルアセンブリ631を備える外科用ステープルデバイス610を例示する。図47および49に示されるように、ネジ632は、ステープルデバイスの最も遠位位置に存在し、ネジストップ906は、プッシャーリンク674の近位末端に隣接して配置される。この位置において、ロックピン693(これは、安全リンク692に固定される(図31))は、トリガープレート676および678を発射する際のノッチ638に配置され(図39)、発射トリガー620の作動を防止する。図50に示されるように、アンビル保持具638の脚部670は、アンビルアセンブリ630のセンターロッド754の周りに配置され、センターロッド754のアベツメント775がアンビル保持具638の輪状レセス777内に配置される。ロックアウトチューブ870の輪状突出部872は、ロック部材787の移動止め789内に配置され(図54A)、このデバイスの近接の間、アンビル保持具638の脚部670の周りでロックアウトチューブ870を固定する。アンビル保持具638は、近接の間、ロックアウトチューブ870に引っ込められ、アンビル保持具638の脚部870の露出された長さは短く、アンビル保持具638からアンビルアセンブリ630を取り外すために必要とされる力を増大させる。アンビル保持具を、予め決められた距離でロックアウトチューブ870に収縮される場合、アンビル保持具638上のショルダー871は、ロックアウトチューブ870の遠位端と係合し(図54B)、移動止め789から輪状突出部872を押し込み、そしてアンビル保持具638と近位にロックアウトチューブ870を押し込む。
【0101】
図56および57を参照すると、アンビルアセンブリ630およびシェルアセンブリ631は、図56の矢印「J」によって示される方向に向かって近接ノブ622を回転することによって近接される。ノブ622の回転は、スリーブ633の回転をもたらし、ネジ632のチャネル650に沿ってスリーブピン652を移動させる。スリーブ633が定常ハンドル618に軸方向に固定されるので、ピン652がチャネル650を通って移動される場合、ネジ650が定常ハンドル618内で近位に移動される。ネジ650が近位に移動される場合、ネジ伸長部634および636、アンビル保持具638ならびにアンビルアセンブリ630を近位に引く。アンビルアセンブリ630は、シェルアセンブリ631と並列配列で近接される。
【0102】
図56に例示されるように、ネジ632が定常ハンドル618内に近位で移動される場合、ネジ632に固定されるネジストップ906がまた、近位に移動する。ネジトップ(screw stop)906が、下方向に延びるアバットメント1000および凹面1002を備える。近接の最終段階の間、アバットメント1000は、安全リンク692のガイド部材692bと係合し、安全リンク692を近位に引き、ガイド部材692bが、バネ697の付勢に対して定常ハンドル618の内部壁内でスロット695に沿って移動する。安全リンク692が近位に移動される場合、ロックピン693が、発射リンク672のチャネル690の上方向に移動し、そしてロックピン693は、発射トリガー620のノッチ683との係合を解除して、発射トリガーを作動させるために移動される。
【0103】
図57Aに例示されるように、アンビル保持具638上のショルダー871は、ロックアウトチューブ870を近位に移動させた結果、ロックアウトチューブ870上の輪状突出部872は、ロック部材787の移動止め789にもはや配置されない。
【0104】
図58〜61は、トリガー620の発射ストロークの間の、外科用ステープル610のハンドル部分62を例示する。アンビル630およびシェルアセンブリ631は近接された後、発射リンク672の末端698上の旋回部材700は、ネジストップ906の凹面1002に配置され、そしてロックピン693は、ノッチ683の近位に配置される。トリガーロック626はまた、解除され、すなわちロックなしの位置に手動で旋回される。外科用ステープルデバイス610は、ここで、発射位置にある。
【0105】
ステープルデバイス610を発射するために、発射トリガー620が、矢印「K」によって示される方向に向かって旋回される。旋回部材700は、ネジストップ906の凹面1002でロックされるので、トリガー620は、遠位に移動するように押し込められる。トリガー620は、旋回部材684によってプッシャーリンク674の近位端に固定される。従って、プッシャーリンク674はまた、細長本体部分614内で遠位に移動される。同時に、トリガープレート676および678の頂部表面は、ロックピン693と係合し、スロット695に沿って矢印「L」によって示される方向に向かってさらに近位に、安全リンク692のガイド部材692bを押し込める。発射トリガー620が、この発射ストロークの末端に到達する場合、発射トリガー620上に形成される係合部材1010は、安全リンク692の弱い部分699と係合し(図60)、安全リンク692を2つの部分に分断する(図61)。安全リンク692が分断した後、聴覚的表示および触覚的表示が、外科医に提供され、発射が完了する。発射トリガー620が収縮される場合(図61)、バネ706は、収縮位置までプッシャーリンク674を戻す。バネ697はまた、発射トリガー620のノッチ683と係合するようにロックピン693を戻し、発射トリガー620のさらなる旋回を防止する。安全リンク692が分断される場合、デバイス610の近接により、ノッチ683からロック部材693が取り除かれない。
【0106】
図62および65は、発射トリガー620の発射ストロークの直前および直後の、外科用ステープルデバイス610のヘッド部分616を例示する。上で議論されるように、プッシャーリンク674は、図65の矢印「M」によって示される方向に移動されるので、プッシャーバック786およびプッシャー790は、遠位方向に進み、フィンガー826がスロット828を通って押出され、ステープル830は、組織1040を通ってアンビル729のポケット740に向けて押し込まれる。同時に、円形ナイフ788は、組織の中心に進められる。ナイフ788が遠位に進められるので、ナイフ788は、カットリング728およびバックアッププレート726と係合し、さらにアンビルヘッド724に向けて移動して、バックアッププレート726のタブ750をセンターロッド754と係合しないよう移動させる。図66〜68を参照のこと。タブ750をセンターロッド754と係合しないよう移動させることによって、上記のように、アンビルヘッドアセンブリ720は、自由状態となり、アンビルアセンブリ630およびシェルアセンブリ631が近接しなくなった後、センターロッド754上の旋回部材764の周りで旋回する
外科用ステープルデバイス610を使用して、円形吻合を実施する。代表的に、円形吻合は、結腸または腸管のような疾患した脈管の一部を除去するための手順の間に必要とされる。このような手順の間、疾患した脈管の一部が除去され、そして残りの脈管セクションの末端部分が、外科用ステープルデバイスを使用して共に結合される。
【0107】
外科用ステープルデバイス610を使用するこのような手順の間、疾患した脈管の一部を除去する前に、そこに装着された除去可能なトロカール776を備えたアンビルアセンブルリ630(図46)は、疾患した脈管部分の第一側部上の第一脈管セクションに配置される。除去可能なトロカール776は、アンビルアセンブリを操作するための縫合ラインを受容するためのボア776aを備える。疾患した脈管部分が除去され、そして第一脈管セクションおよび第二脈管セクションの開放末端が縫合された後、図51に示されるようなデバイス610の遠位末端は、疾患した脈管部分の他の側部上の第二脈管セクションに配置される(ここでは、除去されない)。この時点で、トロカール776は、第一脈管セクションの末端の縫合ラインを介して押出され、そしてセンターロッド754から除去される。次に、トロカール840は、第二脈管セクションの縫合ラインを介して押出される。ここで、センターロッド754は、トロカール840の周りに配置され、そしてアンビルアセンブリ630をアンビル保持具638に固定するために、アンビル保持具638に押出される(図52)。外科用ステープルデバイス610は、ここで、上記の様式で近接され、そして発射され得、第一脈管セクションおよび第二脈管セクションの末端を結合し、そして脈管セクションの管腔を塞ぐ任意の組織を除去する。外科用ステープルデバイスが発射され、そして離れた後、ヘッドアセンブリ720が、図68に示される位置まで突き出され、アンビルアセンブリのプロフィールを減少させ、そして脈管管腔からの装置の取り出しを単純にする。アンビルアセンブリの解離の間、近接機構の構成要素と係合するハンドル部分612で係合部材を提供することが企図され、アンビルヘッドアセンブリが突き出るのに十分な距離で接近されない、触覚的表示および/聴覚的表示を提供する。この係合部材を移動して、発射トリガーによって近接機構の構成要素と整列した位置まで移動され得ることが想定される。
【0108】
種々の改変が、本明細書中に開示される実施形態に対してなされ得ることが理解される。例えば、このデバイスの個々の成分を構築するために使用される材料は、所望の結果を達成するために、種々の公知の材料から選択され得る。さらに、表示に形成される特定の標識は、本明細書中に開示される標識以外であり得る(すなわち、他の標識も想定される)。従って、上の記載は、限定としてではなく、好ましい実施形態の単位例示として構築されるべきである。当業者は、本明細書に添付される特許請求の範囲および精神内で他の改変を想定する。
【0109】
ここで開示される外科用ステープルデバイスの種々の好ましい実施形態が、図面を参照して本明細書中に開示される。
【特許請求の範囲】
【請求項1】
明細書中に記載の発明。
【請求項1】
明細書中に記載の発明。
【図1】


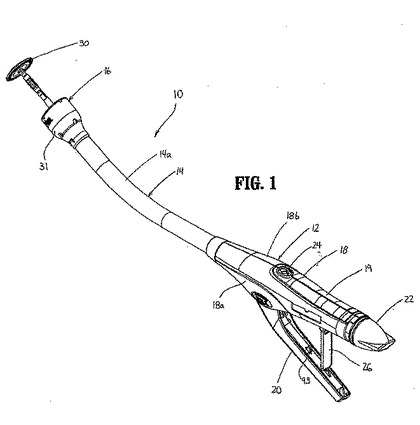
【図2】
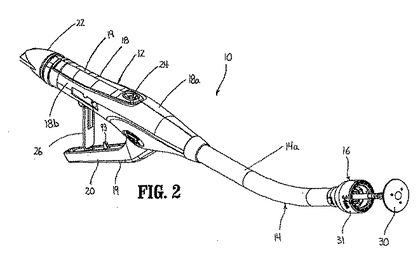
【図3】
【図4】
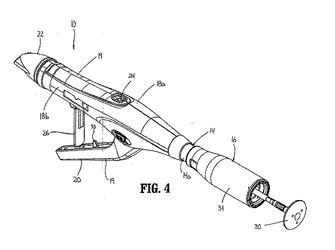
【図5】
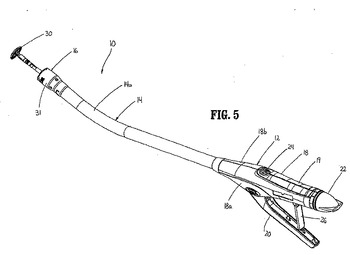
【図6】
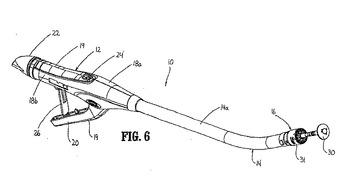
【図7】
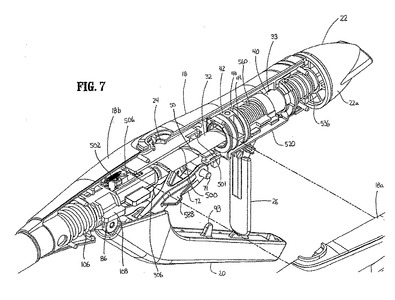
【図8−1】
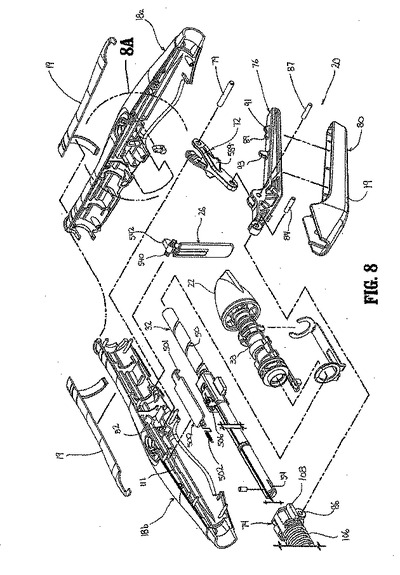
【図8−2】
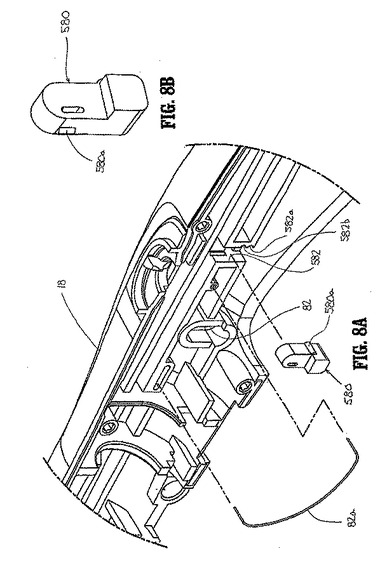
【図9−1】
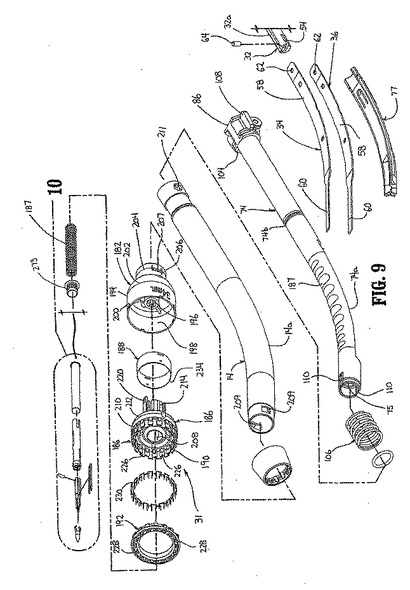
【図9−2】
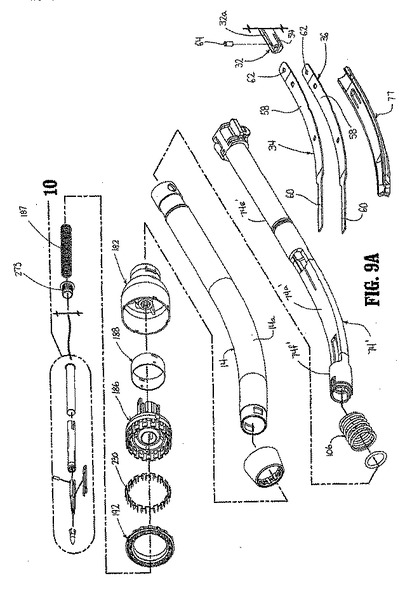
【図9−3】
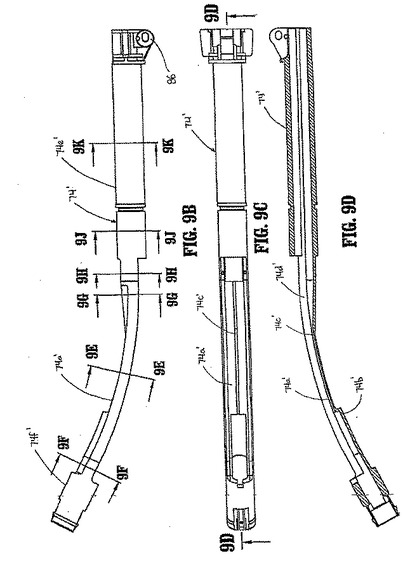
【図9−4】
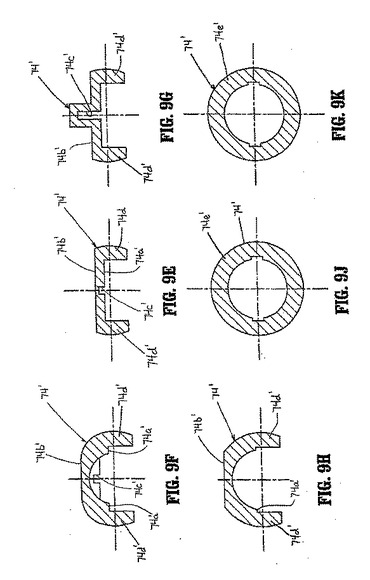
【図9−5】
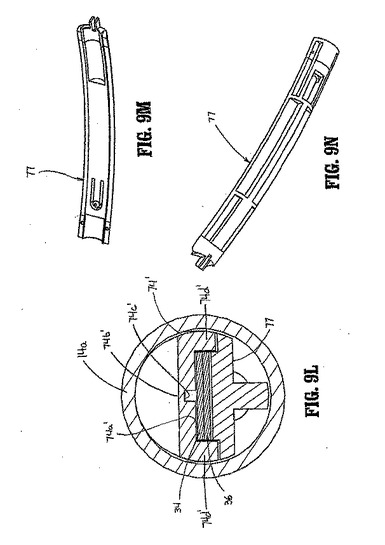
【図11】
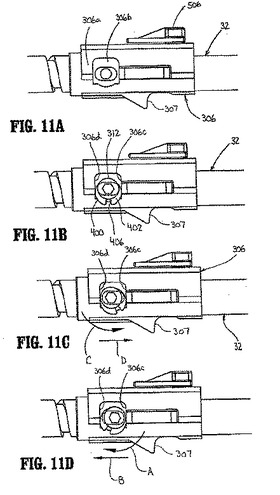
【図12】
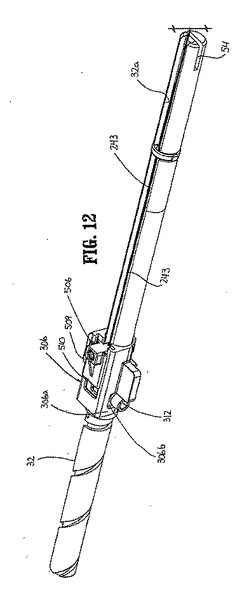
【図13】
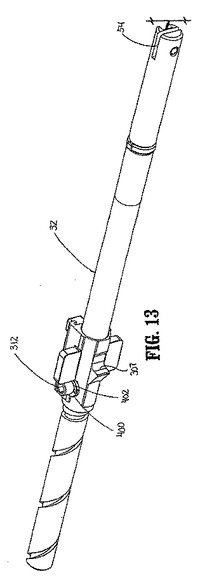
【図14】
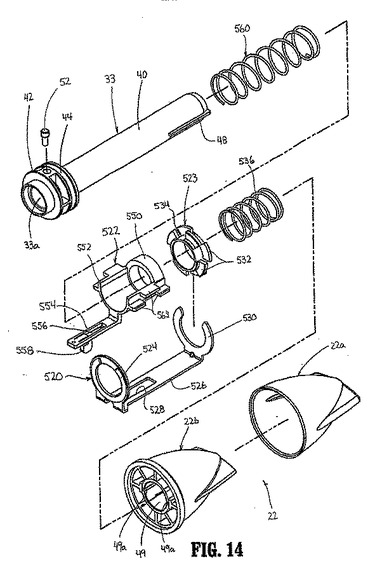
【図15】
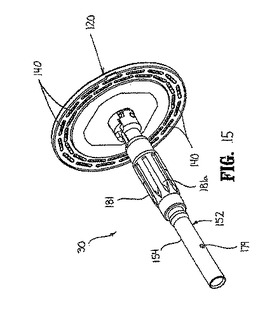
【図15A】
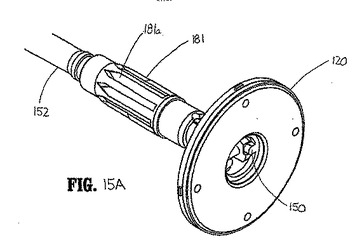
【図15B】
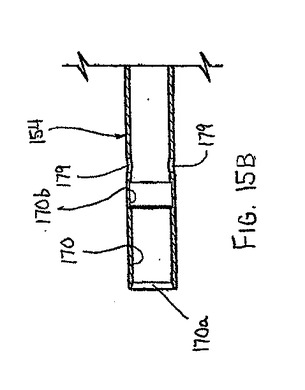
【図15C】
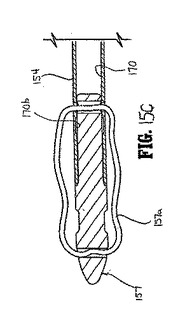
【図16】
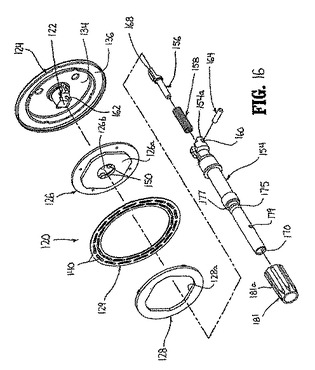
【図16A】
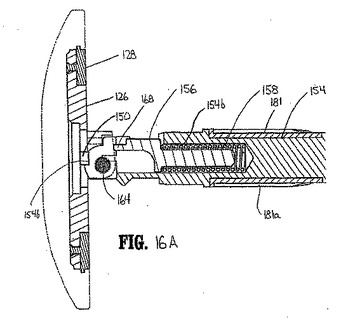
【図16B】
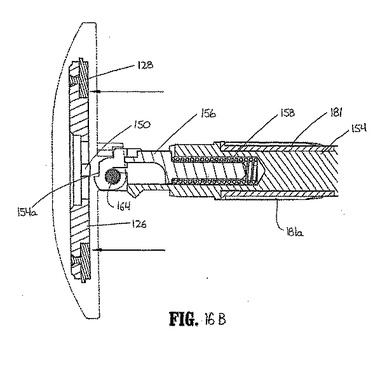
【図17】
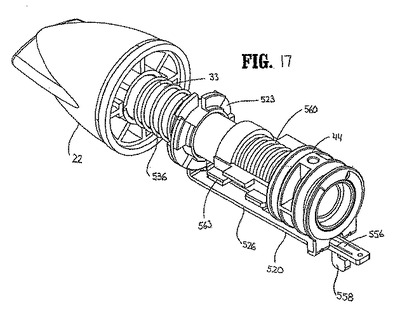
【図18】
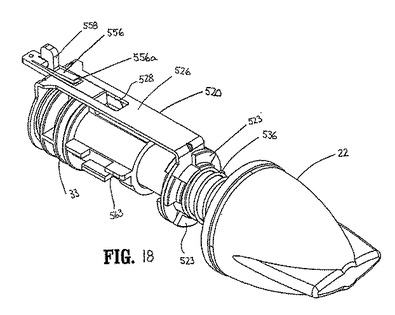
【図19−1】
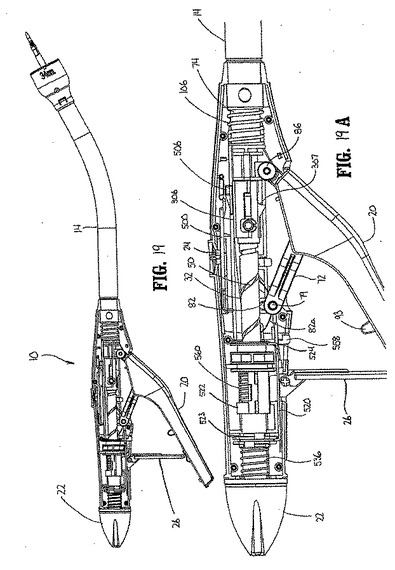
【図19−2】
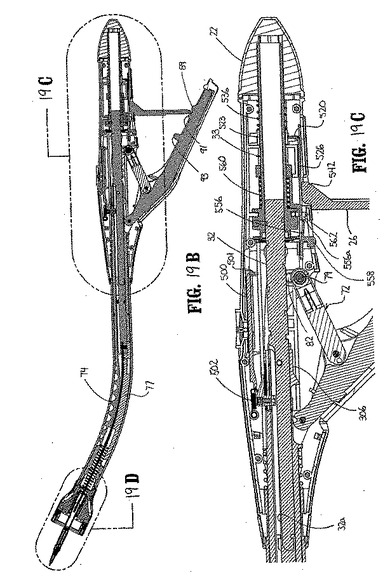
【図19−3】
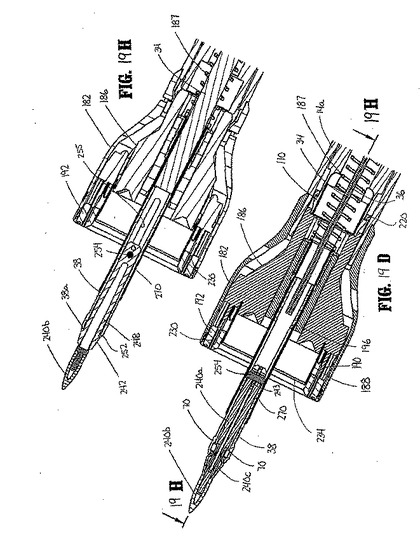
【図19−4】
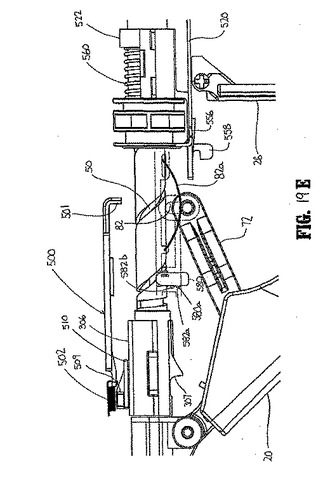
【図19−5】
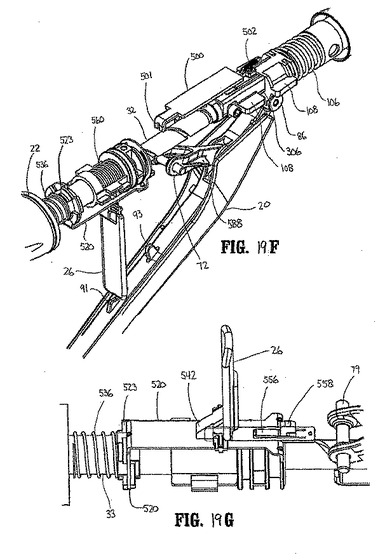
【図20−1】
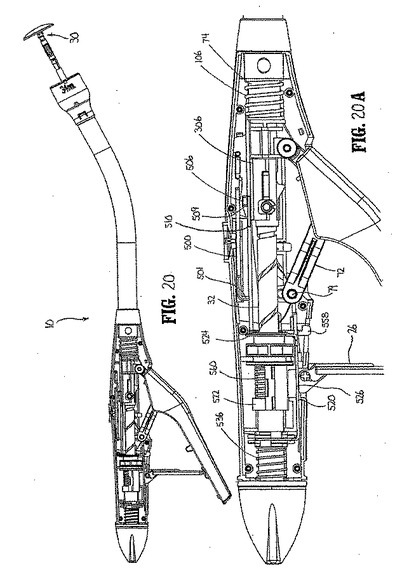
【図20−2】
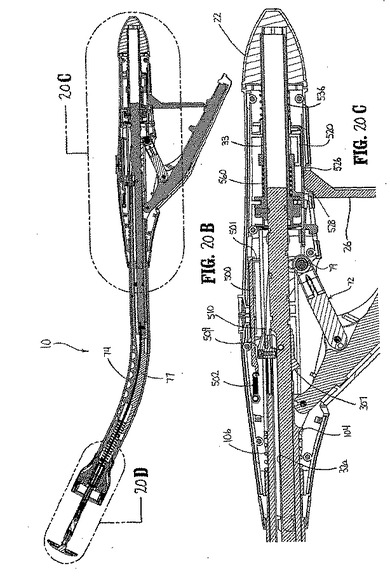
【図20−3】
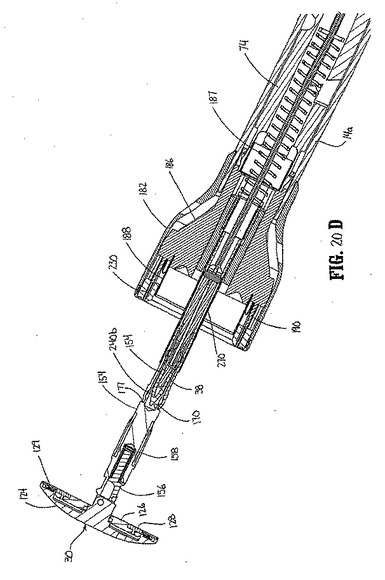
【図20−4】
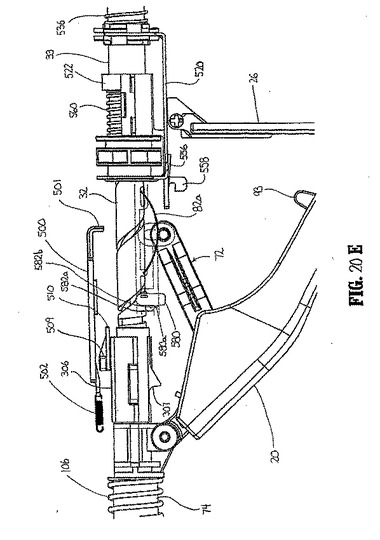
【図20−5】
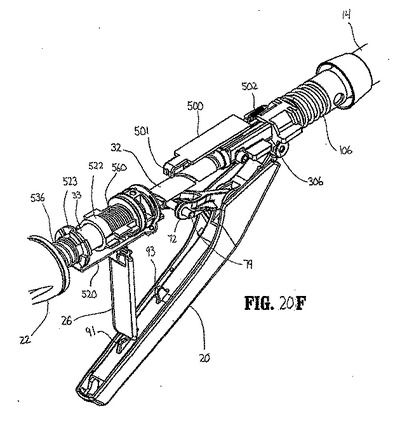
【図20−6】
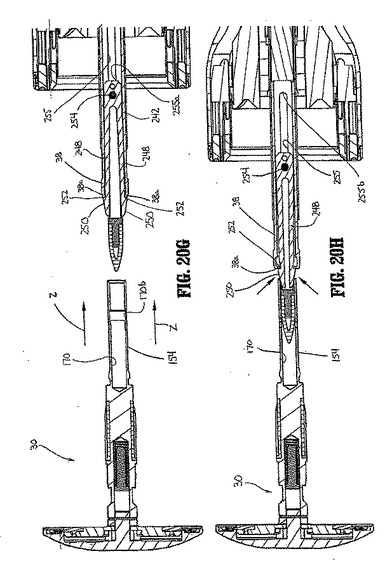
【図21−1】
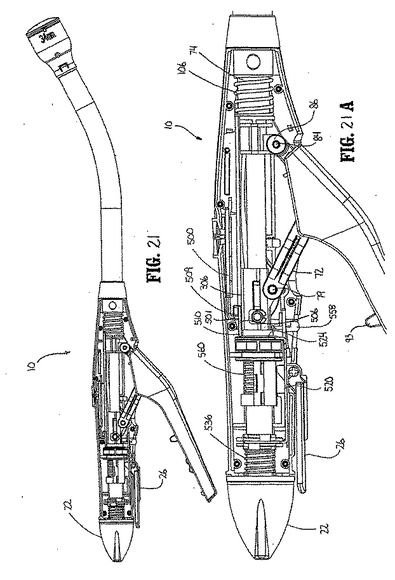
【図21−2】
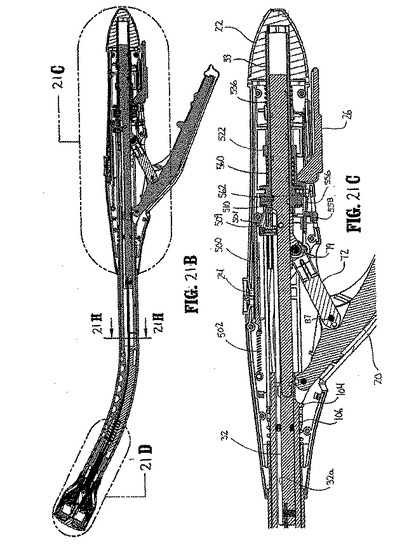
【図21−3】
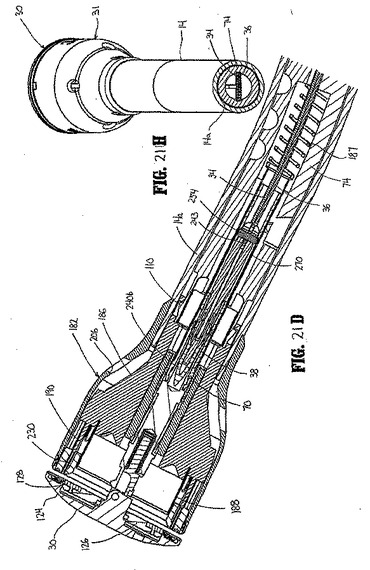
【図21−4】
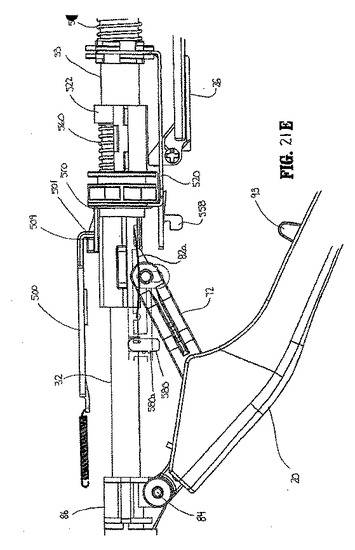
【図21−5】
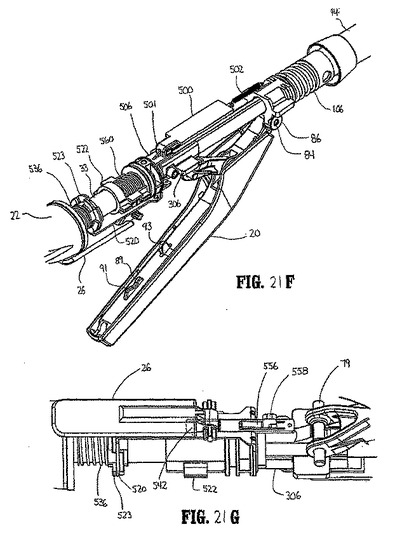
【図22−1】
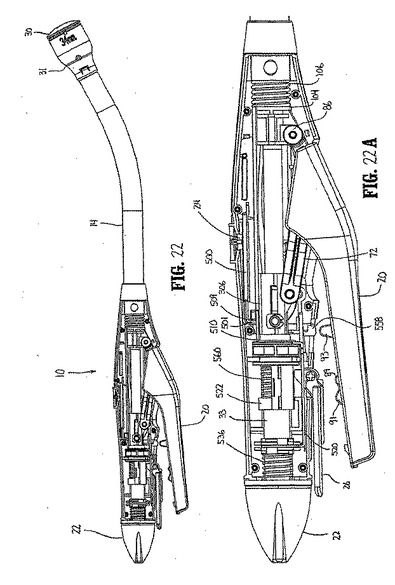
【図22−2】
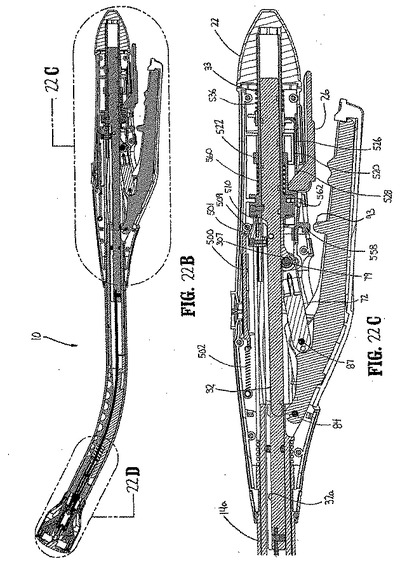
【図22−3】
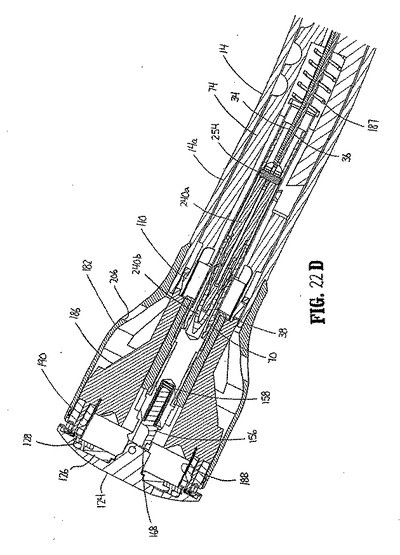
【図22−4】
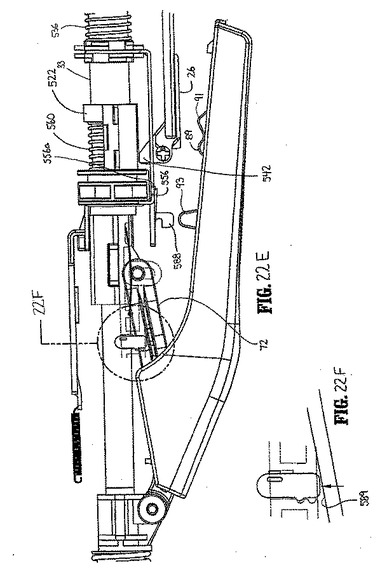
【図23−1】
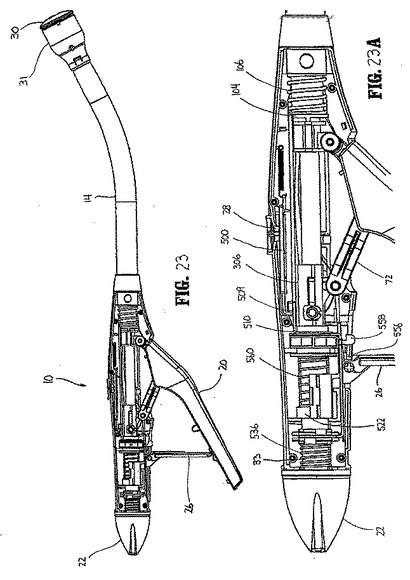
【図23−2】
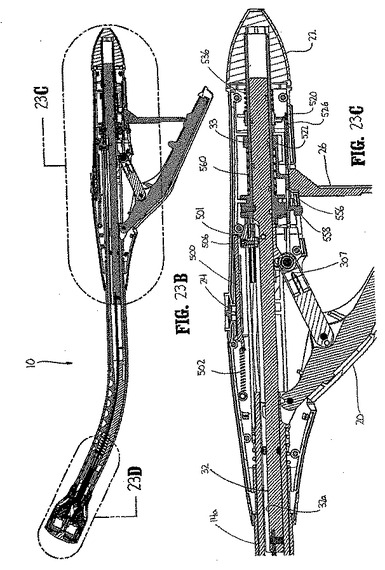
【図23−3】
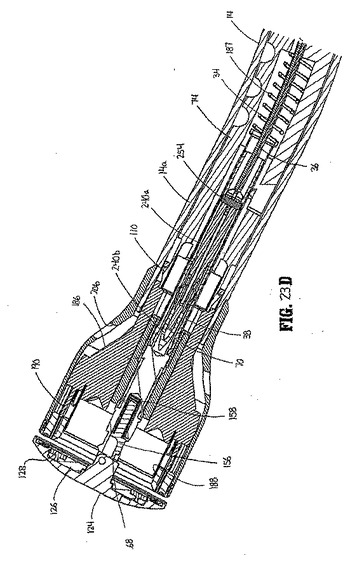
【図23−4】
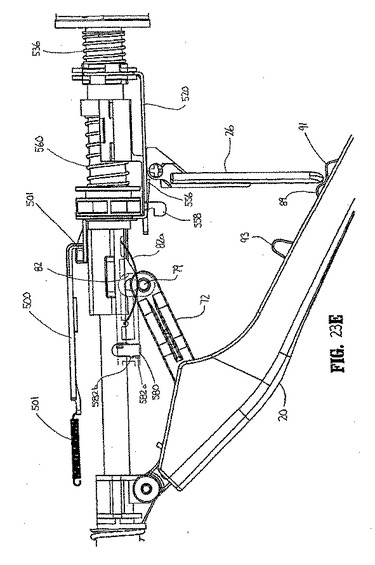
【図23−5】
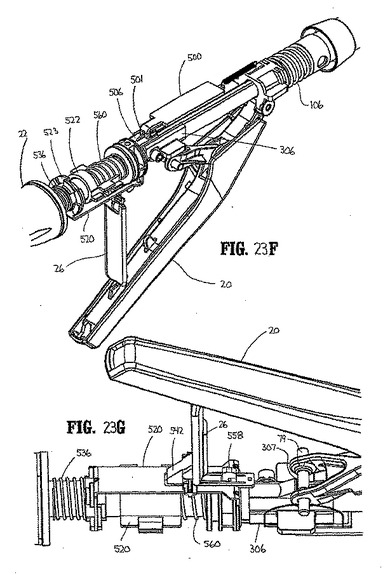
【図24−1】
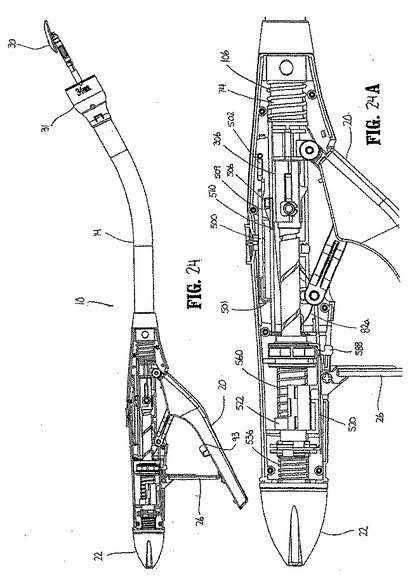
【図24−2】
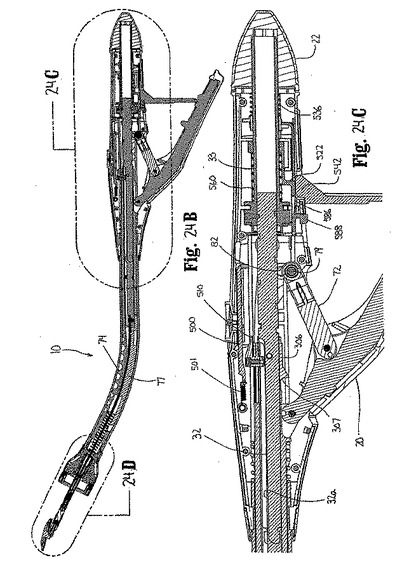
【図24−3】
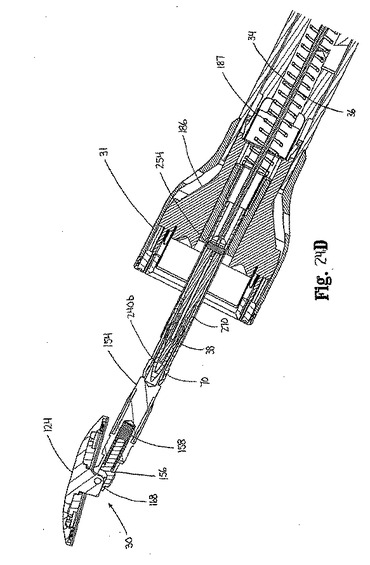
【図24−4】
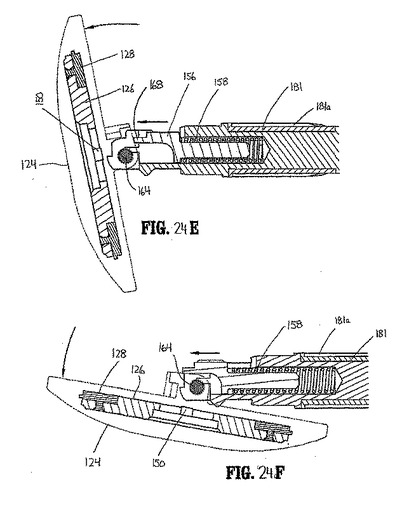
【図24−5】
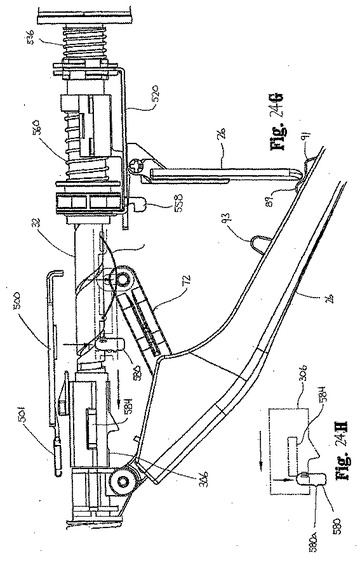
【図25】
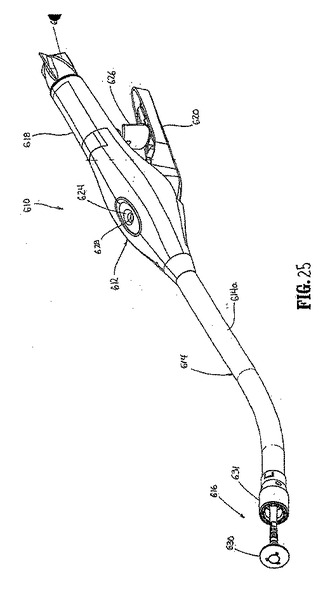
【図26】
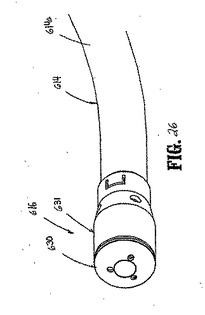
【図27】
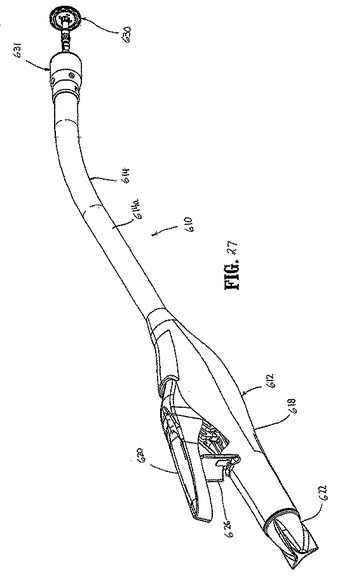
【図28】
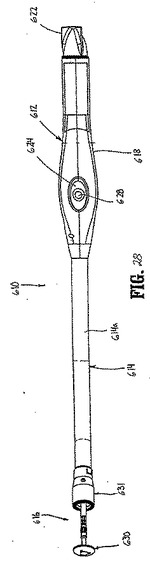
【図29】
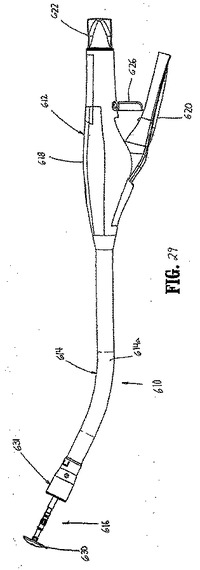
【図30】
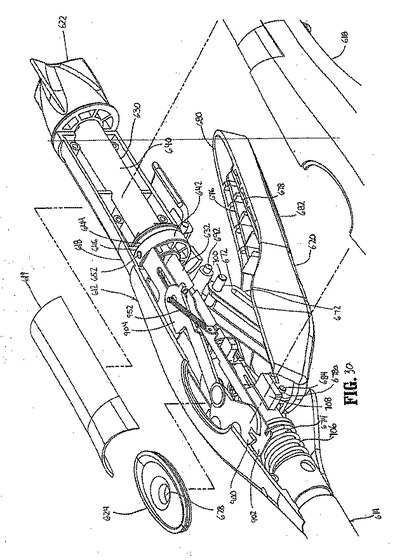
【図31】
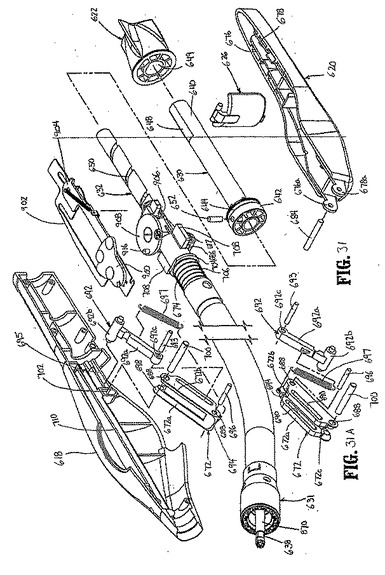
【図32】
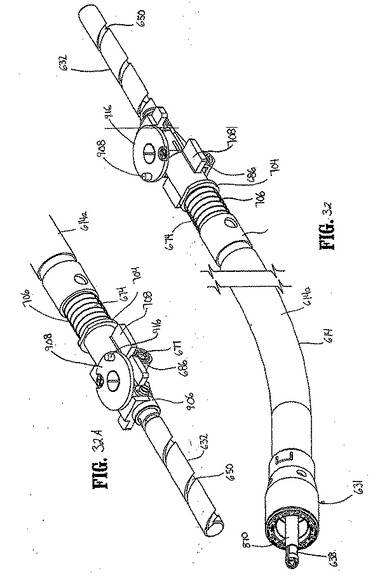
【図33】
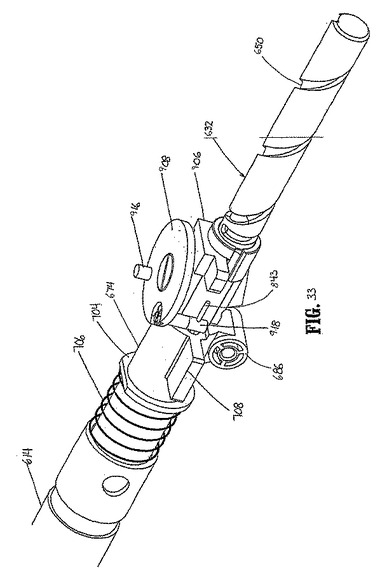
【図34】
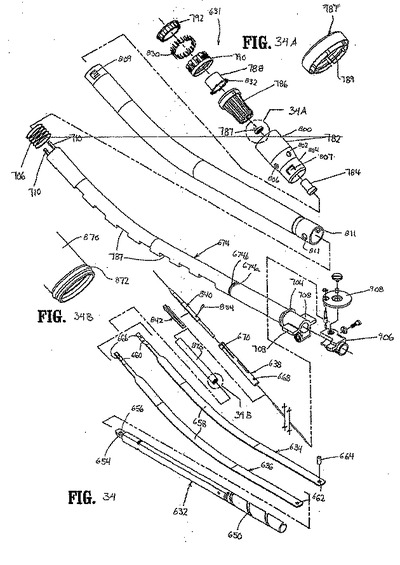
【図35】
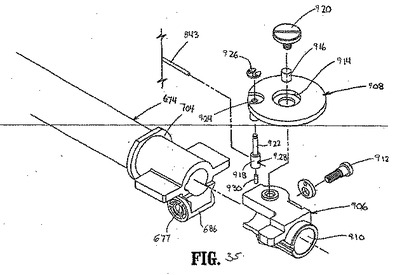
【図36】
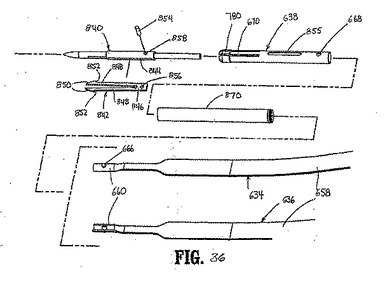
【図37】
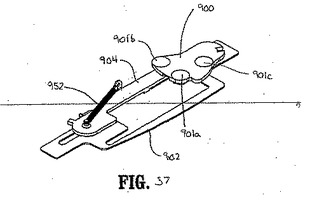
【図38】
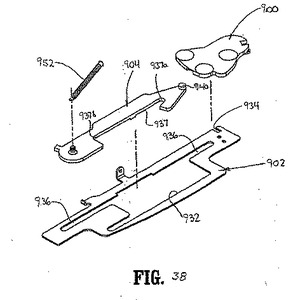
【図38A】
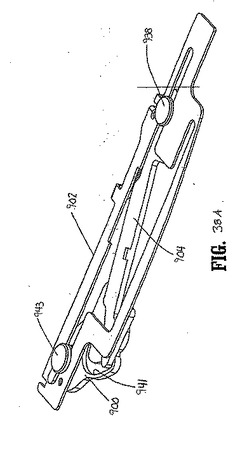
【図39】
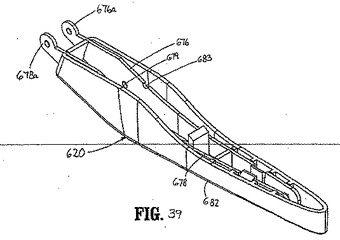
【図40】
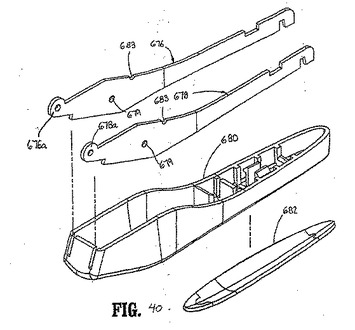
【図41】
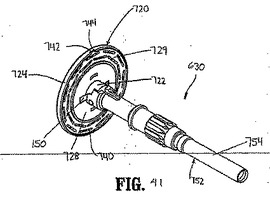
【図42】
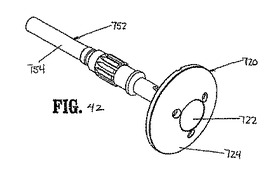
【図43】
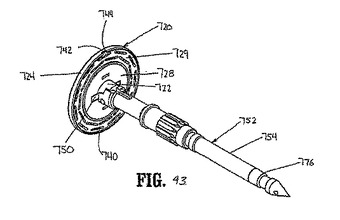
【図44】
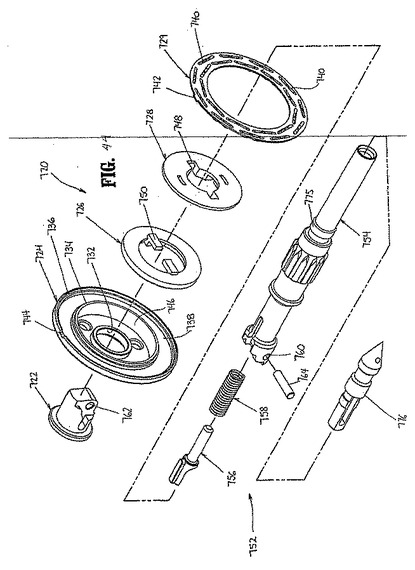
【図45】
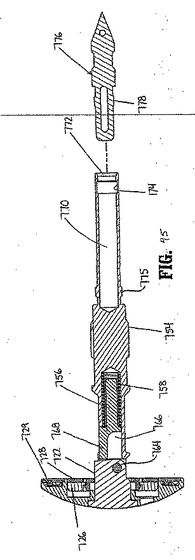
【図46】
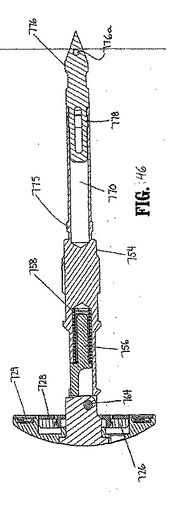
【図47】
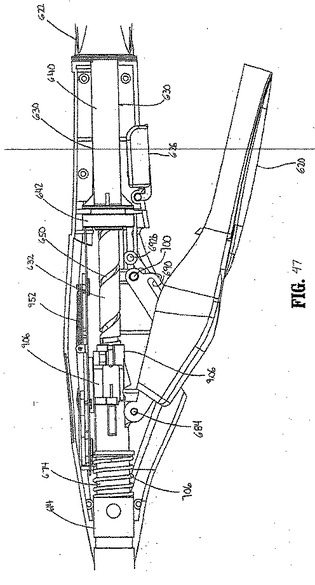
【図48】
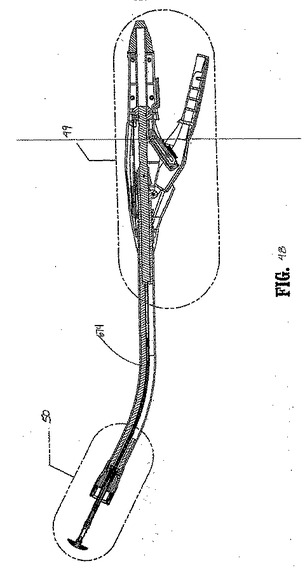
【図49】
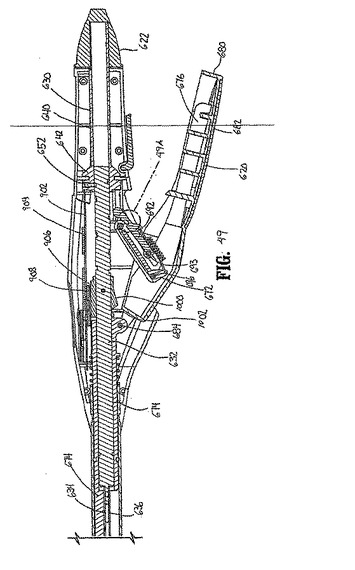
【図49A】
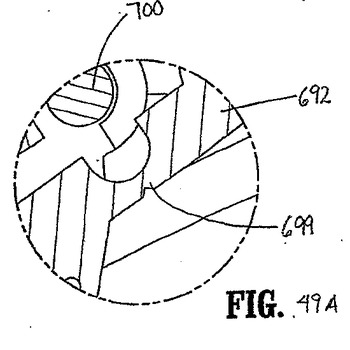
【図50】

【図51】
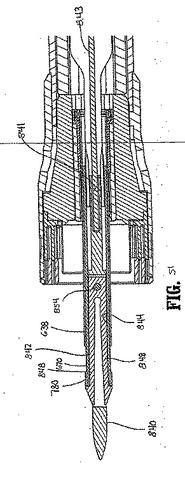
【図52】
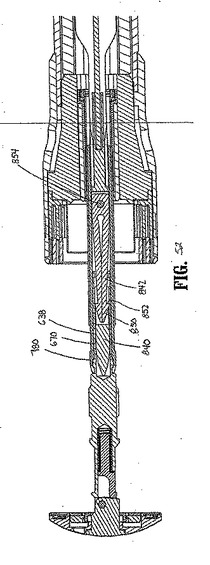
【図53】
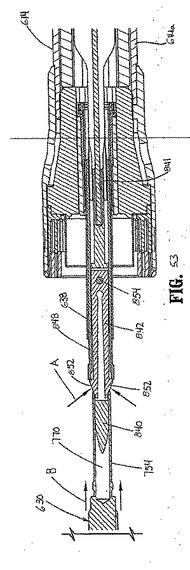
【図53A】
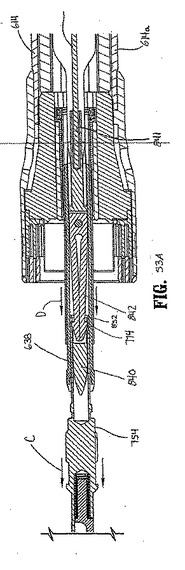
【図54】
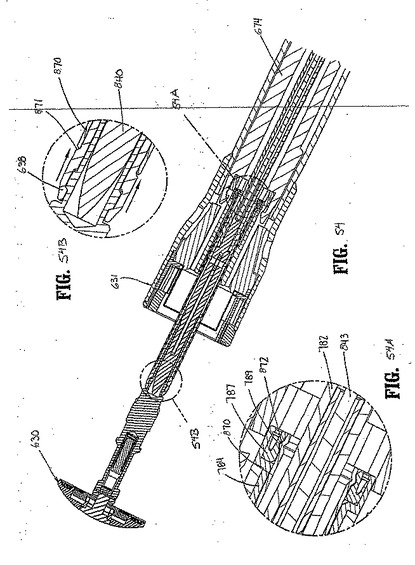
【図55】
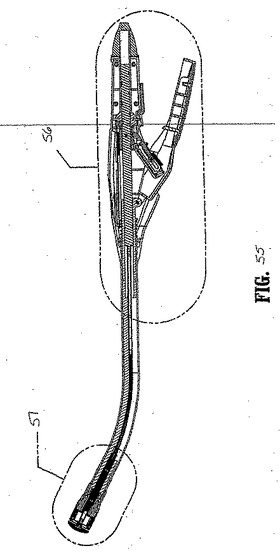
【図56】
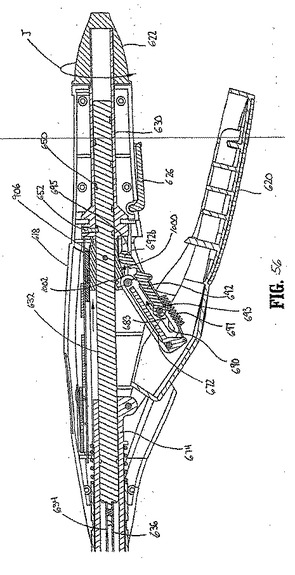
【図57】
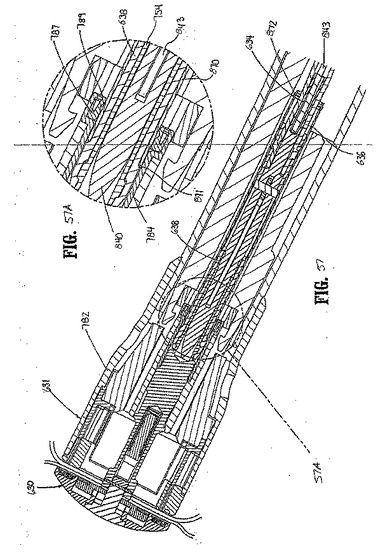
【図58】
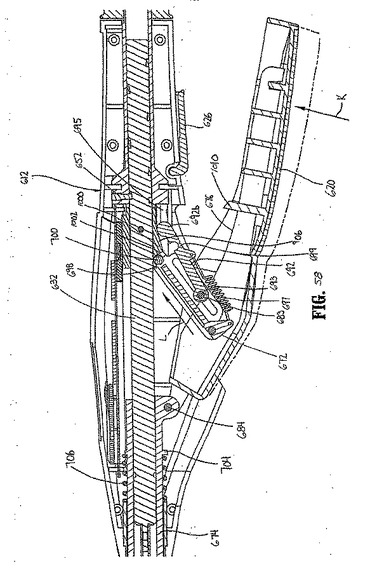
【図59】
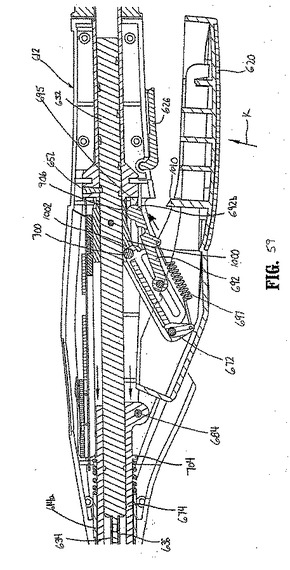
【図60】
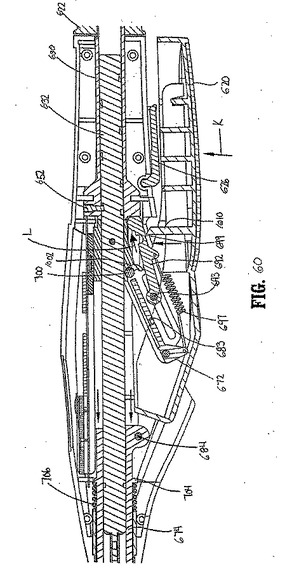
【図61】
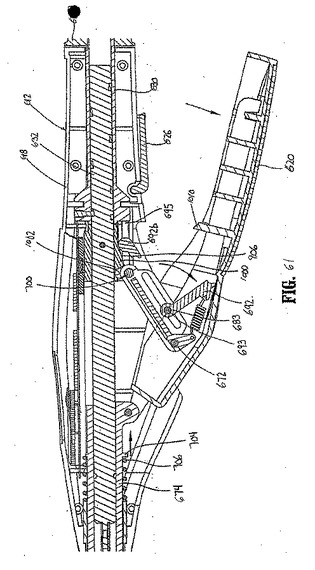
【図62】
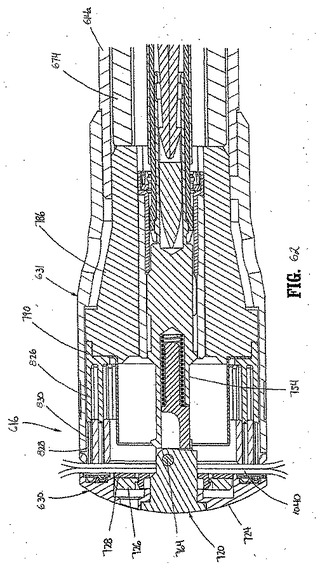
【図63】
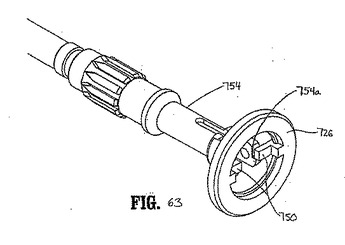
【図64】
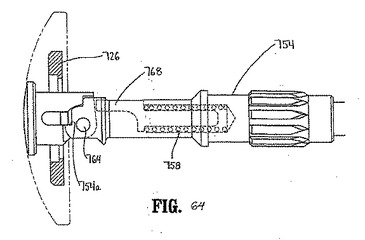
【図65】
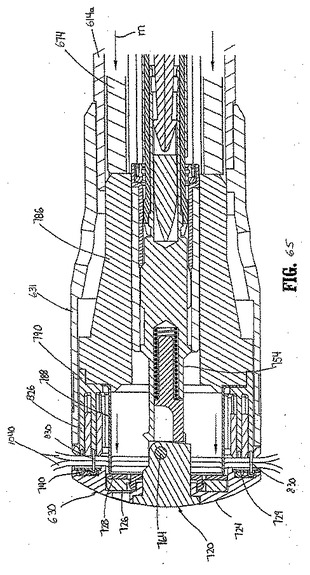
【図66】
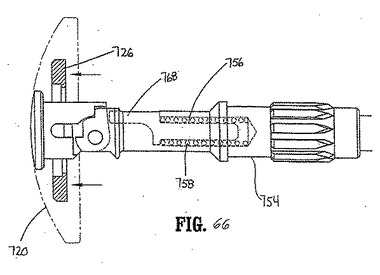
【図67】
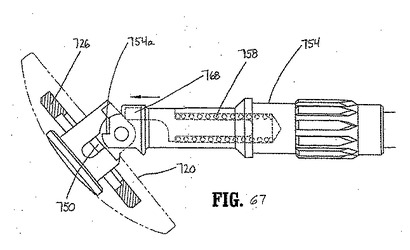
【図68】
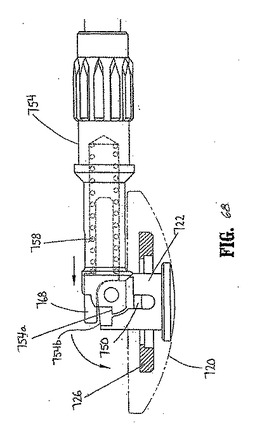
【図69】
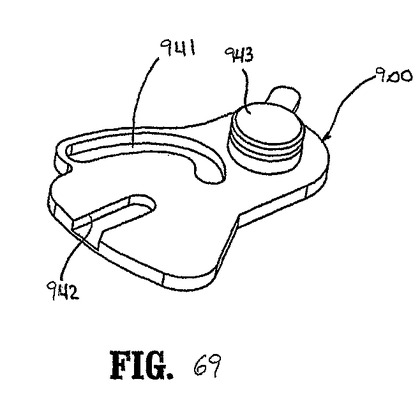
【図70】
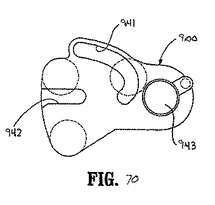
【図71】
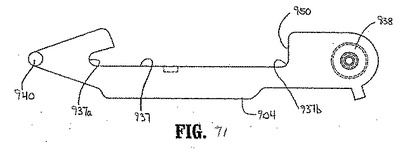
【図72】
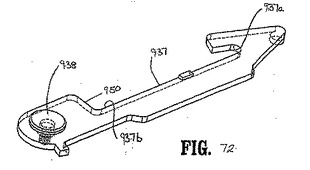
【図73】
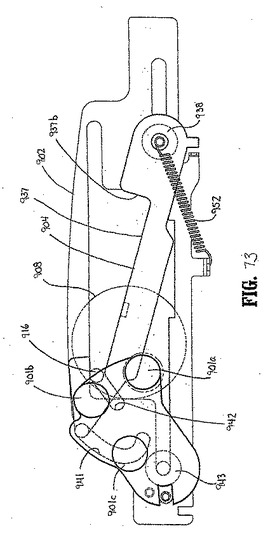
【図74】
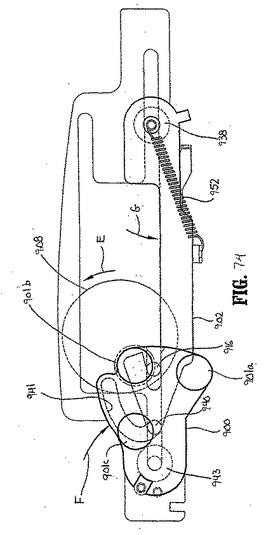
【図75】
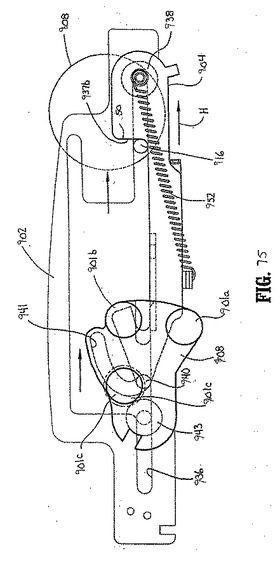
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8−1】
【図8−2】
【図9−1】
【図9−2】
【図9−3】
【図9−4】
【図9−5】
【図11】
【図12】
【図13】
【図14】
【図15】
【図15A】
【図15B】
【図15C】
【図16】
【図16A】
【図16B】
【図17】
【図18】
【図19−1】
【図19−2】
【図19−3】
【図19−4】
【図19−5】
【図20−1】
【図20−2】
【図20−3】
【図20−4】
【図20−5】
【図20−6】
【図21−1】
【図21−2】
【図21−3】
【図21−4】
【図21−5】
【図22−1】
【図22−2】
【図22−3】
【図22−4】
【図23−1】
【図23−2】
【図23−3】
【図23−4】
【図23−5】
【図24−1】
【図24−2】
【図24−3】
【図24−4】
【図24−5】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図38A】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図49A】
【図50】
【図51】
【図52】
【図53】
【図53A】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図68】
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【公開番号】特開2012−35093(P2012−35093A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2011−208161(P2011−208161)
【出願日】平成23年9月22日(2011.9.22)
【分割の表示】特願2008−323005(P2008−323005)の分割
【原出願日】平成14年4月3日(2002.4.3)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【分割の表示】特願2008−323005(P2008−323005)の分割
【原出願日】平成14年4月3日(2002.4.3)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]