
輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラム
【課題】画像内における動きのある対象物のプライバシーを保護することを課題とする。
【解決手段】輪郭抽出システムは、符号化装置及び復号化装置を備える。符号化装置は、フィールド予測モードによって符号化した場合の第1符号化量が、フレーム予測モードによって符号化した場合の第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する。復号化装置は、符号化データに含まれるヘッダ情報から、ピクチャ構造情報及び予測モード情報を読み出し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。また、復号化装置は、輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する。
【解決手段】輪郭抽出システムは、符号化装置及び復号化装置を備える。符号化装置は、フィールド予測モードによって符号化した場合の第1符号化量が、フレーム予測モードによって符号化した場合の第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する。復号化装置は、符号化データに含まれるヘッダ情報から、ピクチャ構造情報及び予測モード情報を読み出し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。また、復号化装置は、輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムに関する。
【背景技術】
【0002】
近年、世界中には膨大な数の監視カメラが設置され、動きのある対象物を撮影した動画像が日々記録されている。もっとも、記録された動画像の解析が人手によって行われる場合、その解析内容には限界がある。このため、従来、様々な画像解析技術が提案されている。例えば、動きベクトルが検出された画像領域を移動領域とみなして動きのある対象物を抽出する技術や、この技術を前提に更にノイズの除去を行う技術等が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−250118号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の技術では、動きのある対象物のプライバシーが保護されているとはいえない場合があった。例えば、世界中に設置されている監視カメラは、不特定の人を撮影する可能性があるが、監視目的といってもプライバシーの観点から撮影可能なエリアは限定させるべきである。
【0005】
本発明は、上記に鑑みてなされたものであって、動きのある対象物のプライバシーを保護することが可能な輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態に係る輪郭抽出システムは、符号化装置と、復号化装置とを有する。符号化装置は、対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する検出部と、前記検出部によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフィールド予測モード符号化部と、前記検出部によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフレーム予測モード符号化部と、前記フィールド予測モード符号化部によって前記マクロブロックを符号化した場合の第1符号化量と、前記フレーム予測モード符号化部によって前記マクロブロックを符号化した場合の第2符号化量とを比較し、比較の結果、第1符号化量が第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、前記マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する選択部と、前記選択部によって選択された予測モードに従って前記画像データを符号化する符号化部とを備え、復号化装置は、前記符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域の画像データを他の画像データに加工する加工部とを備えることを特徴とする。
【0007】
また、実施形態に係る輪郭抽出装置は、対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工部とを備えることを特徴とする。
【0008】
また、実施形態に係る輪郭抽出プログラムは、対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出手順と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定手順と、前記特定手順によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定手順と、前記対象物判定手順によって前記対象物が示す物体を判定された場合に、前記特定手順によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工手順とをコンピュータに実行させることを特徴とする。
【発明の効果】
【0009】
実施形態に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムによれば、動きのある対象物のプライバシーを保護することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、実施例1に係る輪郭抽出システムの概要を説明するための図である。
【図2】図2は、実施例1に係る符号化装置の構成を示すブロック図である。
【図3】図3は、実施例1に係る符号化処理手順を示すフローチャートである。
【図4】図4は、実施例1に係る復号化装置の構成を示すブロック図である。
【図5】図5は、輪郭に相当する領域の特定を説明するための図である。
【図6】図6は、実施例1に係る輪郭画像の一例を示す図である。
【図7】図7は、実施例1に係る輪郭抽出処理手順を示すフローチャートである。
【図8】図8は、実施例2に係る復号化装置の構成を示すブロック図である。
【図9】図9は、実施例3に係る復号化装置の構成を示すブロック図である。
【図10】図10は、実施例3における対象物判定部による対象物判定処理の一例を示す図である。
【図11】図11は、実施例3における加工部によって加工された輪郭画像の一例を示す図である。
【図12】図12は、実施例3における選択部による重畳画像生成処理の一例を示す図である。
【図13】図13は、実施例3における選択部による重畳画像生成処理の一例を示す図である。
【図14】図14は、実施例3に係る画像生成処理手順を示すフローチャートである。
【図15】図15は、実施例4に係る復号化装置の構成を示すブロック図である。
【図16】図16は、開示の技術に係る輪郭抽出システムを監視システムに適用した例を説明するための図である。
【発明を実施するための形態】
【0011】
以下、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの実施例を説明する。なお、以下の実施例により本発明が限定されるものではない。
【実施例1】
【0012】
[実施例1に係る輪郭抽出システム10の概要]
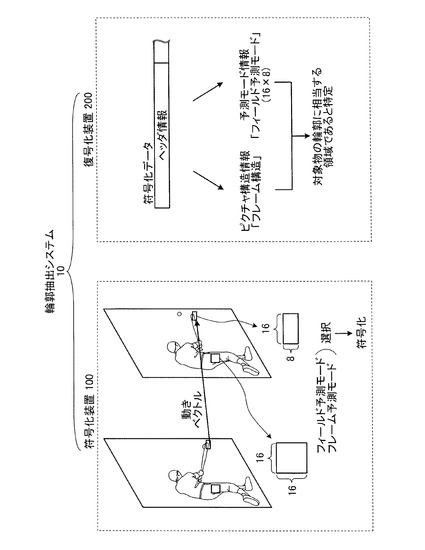
図1は、実施例1に係る輪郭抽出システム10の概要を説明するための図である。図1に例示するように、実施例1に係る輪郭抽出システム10は、符号化装置100及び復号化装置200を備え、符号化装置100において符号化処理が実行され、復号化装置200において復号化処理及び輪郭抽出処理が実行される構成を採る。
【0013】
まず、実施例1に係る符号化装置100において実行される符号化処理の概要を説明する。符号化装置100は、対象物が描出された画像データの入力を受け付け、受け付けた画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する。続いて、符号化装置100は、検出した動きベクトルを用いて各種符号化モード(Intraモード、フレーム予測モード、フィールド予測モード)による符号化を行い、それぞれの符号化量(符号化データの発生量)に基づいて予測モードを選択する。そして、符号化装置100は、選択した予測モードに従って画像データを符号化する。
【0014】
ここで、実施例1に係る符号化装置100は、予測モードを選択するための閾値を予め設定されることで記憶している。そして、符号化装置100は、符号化量を予測モード間で比較する際にこの閾値を用い、比較の結果に基づいて予測モードを選択する。具体的には、符号化装置100は、符号化量を予測モード間で比較した結果、フィールド予測モードによる符号化量が、フレーム予測モードによる符号化量に比較して閾値以上小さいと判定されたことを条件として、フィールド予測モードを選択する。
【0015】
なお、予測モードについて簡単に説明しておくと、例えば、MPEG(Moving Picture Experts Group)で標準化されたMPEG−2、MPEG−4 AVC/H.264などにおいては、符号化方式として、フレーム間予測方式を採用している。フレーム間予測方式は、入力フレームと前後のフレームとは相関度が高いという動画像の性質を利用して、前後のフレームから入力フレームを予測した予測フレームを生成し、生成した予測フレームと入力フレームとの差分を符号化する方式である。具体的には、符号化装置は、フレームを構成する予測単位毎に差分を算出して動きベクトルを検出し、検出した動きベクトル、及び、予測フレームと入力フレームとの差分である差分画像データを符号化して符号化データを生成し、生成した符号化データを復号化装置に送信する。
【0016】
ここで、MPEG−2、MPEG−4 AVC/H.264等においては、動画像がインタレース形式の場合に、マクロブロックの符号化に用いる予測モードとして、フレーム予測モード及びフィールド予測モードの動的選択を規定している。フレーム予測モードは、マクロブロック(横16×縦16画素)毎に1つの動きベクトルを割り当てるモードである。一方、フィールド予測モードは、マクロブロックのトップフィールド成分(横16×縦8画素)及びボトムフィールド成分(横16×縦8画素)それぞれに動きベクトルを割り当てるモードである。なお、フレーム予測モード及びフィールド予測モードは動的に選択されるので、ピクチャ構造は、フレーム構造となる。なお、標準において動的選択を規定しているものの、一般的にはフレーム予測モードが固定的に選択されることが多いが、その理由は、通常、フレーム予測モードの方が、符号化処理の計算量が少なく、より高い圧縮率が得られる傾向にあるからと考えられる。
【0017】
さて、図1に戻り、実施例1に係る復号化装置200において実行される輪郭抽出処理の概要を説明する。復号化装置200は、符号化装置100から符号化データを受信し、受信した符号化データに含まれるヘッダ情報からピクチャ構造情報及び予測モード情報を読み出す。そして、復号化装置200は、読み出したピクチャ構造情報及び予測モード情報に基づいて、対象物の輪郭に相当する領域を特定する。なお、ピクチャ構造情報とは、ピクチャの構造を示す情報であり、予測モード情報とは、マクロブロックの符号化に用いられた予測モードを示す情報である。例えば、ピクチャ構造情報は、ヘッダ情報のピクチャ層に格納されており、予測モード情報は、マクロブロック層に格納されている。
【0018】
ここで、実施例1に係る復号化装置200は、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、図1に例示するように、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を、対象物の輪郭(対象物と背景との境界部分等)に相当する領域として特定する。
【0019】
このようなことから、実施例1に係る輪郭抽出システム10によれば、対象物の輪郭に相当する領域を特定することが可能になり、動きのある対象物を適切に抽出することが可能になる。
【0020】
[実施例1に係る符号化装置100の構成]
次に、図2及び図3を用いて、実施例1に係る符号化装置100の構成を説明する。図2は、実施例1に係る符号化装置100の構成を示すブロック図である。図2に例示するように、実施例1に係る符号化装置100は、特に、符号化モード判定部110と、符号化部120と、可変長復号−逆スキャン部130と、逆量子化−逆DCT(Discrete Cosine Transform)部140と、フレームメモリ150と、動きベクトル検出部160と、動き補償部170と、減算器180とを備える。
【0021】
ここで、実施例1に係る符号化装置100は、公知の符号化装置と同様の機能を有する。この点について簡単に説明すると、まず、符号化装置100は、対象物が描出された画像データの入力を受け付けると、この入力フレームをマクロブロック毎に分割し、動きベクトル検出部160に入力する。動きベクトル検出部160は、フレームメモリ150に格納されている参照フレームと入力フレームとの差分をマクロブロック毎に算出して動きベクトルを検出し、検出した動きベクトルを動き補償部170に送る。
【0022】
動き補償部170は、動きベクトル検出部160から送られた動きベクトルとフレームメモリ150に格納されている参照フレームとを用いて予測フレームを生成し、生成した予測フレームを減算器180に送る。減算器180は、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化モード判定部110に送る。
【0023】
符号化モード判定部110は、入力フレーム及び差分画像データそれぞれの入力を受け付け、符号化モードとして、入力フレームを符号化するIntraモードを選択するか、あるいは、差分画像データを符号化するInterモードを選択するかを判定する。そして、符号化モード判定部110は、判定結果を、符号化に必要なデータ(入力フレーム、あるいは、差分画像データ及び動きベクトル等)とともに、符号化部120に送る。
【0024】
符号化部120は、符号化モード判定部110から受け付けた判定結果に従って、符号化モード判定部110から受け付けたデータを符号化し、符号化データ(ストリームとも称する)を生成する。そして、符号化部120は、生成した符号化データを復号化装置200に向けて出力するとともに、可変長復号−逆スキャン部130に出力する。すると、可変長復号−逆スキャン部130及び逆量子化−逆DCT部140は、符号化データを復号化し、復号化した画像データを参照フレームとしてフレームメモリ150に格納する。なお、上記各部による処理は、いずれもマクロブロック毎に行われる。
【0025】
さて、ここで、実施例1に係る符号化装置100は、上述した公知の符号化装置が有する機能に加え、予測モードを選択するための閾値を予め設定されることで記憶し、符号化量を予測モード間で比較する際にこの閾値を用い、比較の結果に基づいて予測モードを選択する機能を有する。
【0026】
この点について説明する。まず、実施例1に係る符号化装置100は、マクロブロックの符号化に用いる予測モードとして、フレーム予測モード及びフィールド予測モードを動的に選択する。このため、実施例1に係る動きベクトル検出部160は、フレーム予測モード用の動きベクトル検出処理と、フィールド予測モード用の動きベクトル検出処理との双方を行う。すなわち、動きベクトル検出部160は、フレームメモリ150に格納された参照フレームを参照し、マクロブロック(横16×縦16画素)毎に1つの動きベクトルを割り当てる処理と、フレームメモリ150に格納された参照フレームのトップフィールド及びボトムフィールドそれぞれを参照し、マクロブロックのトップフィールド成分(横16×縦8画素)及びボトムフィールド成分(横16×縦8画素)それぞれに動きベクトルを割り当てる処理との双方を行う。そして、動きベクトル検出部160は、フレーム予測モード用の動きベクトル及びフィールド予測モード用の動きベクトルの双方を、動き補償部170に対して出力する。
【0027】
ここで、実施例1に係る動き補償部170は、図2に例示するように、Intra符号化部170aと、フレーム予測モード符号化部170bと、フィールド予測モード符号化部170cとを有する。Intra符号化部170a、フレーム予測モード符号化部170b、及びフィールド予測モード符号化部170cは、並行して処理を行う。
【0028】
まず、Intra符号化部170aは、Intraモードによる符号化を行う。具体的には、Intra符号化部170aは、マクロブロック毎に分割された入力フレームを符号化し、その符号化量を符号化モード判定部110に対して出力する。なお、実施例1において、Intra符号化部170aは、横16×縦16画素のマクロブロック毎に入力フレームを符号化する。
【0029】
また、フレーム予測モード符号化部170bは、フレーム予測モードによる符号化を行う。具体的には、フレーム予測モード符号化部170bは、動きベクトル検出部160から受け付けたフレーム予測モード用の動きベクトルと、フレームメモリ150に格納された参照フレームとを用いて、予測フレームを生成し、生成した予測フレームを減算器180に対して出力する。また、フレーム予測モード符号化部170bは、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化し、その符号化量と、フレーム予測モード用の動きベクトルとを、符号化モード判定部110に対して出力する。
【0030】
また、フィールド予測モード符号化部170cは、フィールド予測モードによる符号化を行う。具体的には、フィールド予測モード符号化部170cは、動きベクトル検出部160から受け付けたフィールド予測モード用の動きベクトルと、フレームメモリ150に格納された参照フレームとを用いて、予測フレームを生成し、生成した予測フレームを減算器180に対して出力する。また、フィールド予測モード符号化部170cは、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化し、その符号化量と、フィールド予測モード用の動きベクトルとを、符号化モード判定部110に対して出力する。
【0031】
一方、符号化モード判定部110は、予測モードを選択するための閾値を予め設定されることで記憶している。そして、符号化モード判定部110は、Intra符号化部170aから出力された符号化量と、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量とを比較する。
【0032】
具体的には、符号化モード判定部110は、Intra符号化部170aから出力された符号化量が最も小さい場合には、Intraモードを選択する。一方、Intra符号化部170aから出力された符号化量が最も大きい場合には、符号化モード判定部110は、次に、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との比較を行う。なお、Intra符号化部170aから出力された符号化量は、最小か最大かのいずれかになり、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との間にはならないと仮定する。
【0033】
そして、符号化モード判定部110は、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との比較の結果、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上小さいと判定されたことを条件として、フィールド予測モードを選択する。一方、符号化モード判定部110は、それ以外の場合には、フレーム予測モードを選択する。
【0034】
その後、符号化モード判定部110は、判定結果を、符号化に必要なデータとともに、符号化部120に送る。具体的には、符号化モード判定部110は、「Intraモードを選択した」との判定結果を送る場合には、符号化に必要なデータとして入力フレームを送る。また、符号化モード判定部110は、「フレーム予測モードを選択した」との判定結果を送る場合には、符号化に必要なデータとして、フレーム予測モード用の動きベクトルと、フレーム予測モードに対応する差分画像データとを送る。また、符号化モード判定部110は、「フィールド予測モードを選択した」との判定結果を送る場合には、符号化に必要なデータとして、フィールド予測モード用の動きベクトルと、フィールド予測モードに対応する差分画像データとを送る。一方、符号化部120は、符号化モード判定部110から送られた判定結果やデータを用いて符号化を行うが、この際、選択された予測モードを示す情報を、符号化データのヘッダ情報に格納する。
【0035】
なお、Intra符号化部170aから出力された符号化量は、横16×縦16画素のマクロブロックに対応する符号化量である。また、フレーム予測モード符号化部170bから出力された符号化量も、横16×縦16画素のマクロブロックに対応する符号化量である。これに対し、フィールド予測モード符号化部170cから出力された符号化量は、横16×縦8画素のマクロブロックに対応する符号化量である。このため、符号化モード判定部110は、比較にあたり、例えば、フィールド予測モード符号化部170cから出力された符号化量については、2マクロブロック分、すなわち、横16×縦16画素のマクロブロックに対応する符号化量を、その比較対象として用いてもよい。比較対象として1マクロブロック分を用いるか、あるいは2マクロブロック分を用いるかは、閾値をどのような値に設定するかによって任意に選択することができる。
【0036】
また、実施例1に係る符号化装置100として各部の処理を説明したが、開示の技術は上記例に限られるものではない。例えば、実施例1においては、動き補償部170が、各種符号化モードによる符号化を行い、符号化量を算出して符号化モード判定部110に出力するものとして説明したが、これに限られるものではなく、例えば、符号化モード判定部110が符号化量を算出し、算出した符号化量を用いて予測モードを選択する構成であってもよい。このように、各部の機能分担は任意に変更することができる。
【0037】
次に、図3は、実施例1に係る符号化処理手順を示すフローチャートである。なお、図3においては、主に実施例1に係る符号化装置100に特有の符号化処理手順を示す。具体的には、まず、動き補償部170は、Intra符号化部170aによる符号化処理、フレーム予測モード符号化部170bによる符号化処理、及びフィールド予測モード符号化部170cによる符号化処理を並行して行う(ステップS101)。
【0038】
次に、符号化モード判定部110は、3つの符号化量それぞれを比較し(ステップS102)、比較の結果、フィールド予測モード符号化部170cから出力された符号化量が、予め記憶している閾値以上に、フレーム予測モード符号化部170bから出力された符号化量より小さいか否かを判定する(ステップS103)。そして、符号化量の差が閾値より小さい、すなわち、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上に小さい場合ではないと判定した場合には(ステップS103肯定)、符号化モード判定部110は、予測モードとしてフレーム予測モードを選択する(ステップS104)。
【0039】
一方、符号化量の差が閾値より大きい、すなわち、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上小さい場合であると判定した場合には(ステップS103否定)、符号化モード判定部110は、予測モードとしてフィールド予測モードを選択する(ステップS105)。
【0040】
ところで、実施例1において、符号化量の比較に用いられる閾値は、符号化データの発生量や予測の誤差量等に基づいて予め決定されたものであり、言い換えると、計算量や圧縮率、あるいは精度等を総合的に勘案して予め決定されたものである。符号化データの発生量が少ない方が、符号化処理の計算量が少なく、より高い圧縮率となると考えられるが、予測の誤差量が多く、精度が低い場合には、必ずしも符号化データの発生量だけに着目するべきではない。また、精度が低い場合には、符号化データの発生量がかえって多くなることもある。
【0041】
ここで、フレーム予測モードによって符号化された場合の符号化量と、フィールド予測モードによって符号化された場合の符号化量とを比較すると、一般的には前者の方が小さくなるが、後者の方が小さくなることもある。この点、実施例1に係る輪郭抽出システム10は、単に後者の方が小さくなる場合にフィールド予測モードを選択するのではなく、符号化量を比較するための閾値を設け、この閾値以上に後者の符号化量が小さくなった場合に、フィールド予測モードを選択する。
【0042】
すなわち、対象物の動きが速い場合には、フィールド予測モードの方が精度が良くなるという関係がある。また、フィールド予測モードの方が精度が良い場合には、フレーム予測モードによって符号化された場合の符号化量と、フィールド予測モードによって符号化された場合の符号化量とを比較した場合に、後者の符号化量の方が小さくなるという関係がある。もっとも、符号化量を単純に比較しただけでは、フィールド予測モードの精度がそれほど良くなっているわけではないにもかかわらず、フィールド予測モードを選択してしまう可能性がある。このような場合は、必ずしも対象物の輪郭に相当しないことがあり、結果として、復号化装置200において、対象物の輪郭に相当しないマクロブロックの画像上の位置を、対象物の輪郭に相当する領域として特定してしまうおそれがある。
【0043】
この点、実施例1に係る符号化装置100は、符号化量の比較のためにあえて閾値を設け、閾値を上回るほどにフィールド予測モードの符号化量が小さい場合にだけ、フィールド予測モードを選択する。すると、結果として、復号化装置200において、閾値を上回るほどにフィールド予測モードの符号化量が小さい場合にだけ、そのマクロブロックの画像上の位置が、対象物の輪郭に相当する領域として特定されることになる。
【0044】
なお、閾値は、例えば、実験結果や経験則等に基づいて決定することができる。例えば、動きのある対象物をサンプルとして各種符号化モードによる符号化量を計測し、対象物の輪郭に相当するマクロブロックの場合には、その符号化量にどれほどの差が生じるかを予め求めることで、閾値を決定することができる。
【0045】
[実施例1に係る復号化装置200の構成]
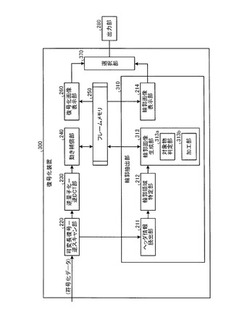
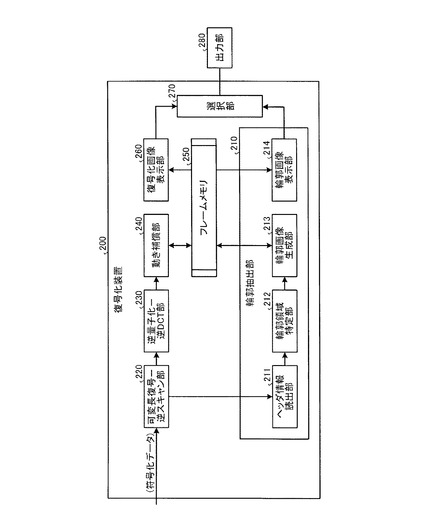
次に、図4及び図5を用いて、実施例1に係る復号化装置200の構成を説明する。図4は、実施例1に係る復号化装置200の構成を示すブロック図である。図4に例示するように、実施例1に係る復号化装置200は、特に、輪郭抽出部210と、可変長復号−逆スキャン部220と、逆量子化−逆DCT部230と、動き補償部240と、フレームメモリ250と、復号化画像表示部260とを備える。なお、実施例1に係る復号化装置200は、図4に例示するように外部の出力部280に接続し、復号化画像や輪郭抽出部210において生成された輪郭画像を表示する構成を採る。選択部270は、出力部280に表示する画像の選択を受け付け、受け付けた選択に従って出力部280に画像を表示する。例えば、選択部270は、復号化画像及び輪郭画像の双方を重畳表示したり、いずれか一方の画像のみを表示する。
【0046】
ここで、実施例1に係る復号化装置200は、公知の復号化装置と同様の機能を有する。この点について簡単に説明すると、まず、復号化装置200は、符号化データの入力を受け付けると、可変長復号−逆スキャン部220及び逆量子化−逆DCT部230が符号化データを復号化し、例えば動きベクトル及び差分画像データを取得する。次に、動き補償部240が、復号化された動きベクトルとフレームメモリ250に格納されている参照フレームとを用いて予測フレームを生成し、生成した予測フレームと復号化された差分画像データとを用いて入力フレームを復号化し、得られた復号化画像をフレームメモリ250に格納する。そして、復号化画像表示部260が、フレームメモリ250に格納された復号化画像を、出力部280に表示する。
【0047】
さて、ここで、実施例1に係る復号化装置200は、上述した公知の復号化装置が有する機能に加え、輪郭抽出部210を備え、この輪郭抽出部210が、輪郭抽出処理を行う。この点について説明する。輪郭抽出部210は、図4に例示するように、ヘッダ情報読出部211と、輪郭領域特定部212と、輪郭画像生成部213と、輪郭画像表示部214とを有する。
【0048】
ヘッダ情報読出部211は、符号化データに含まれるヘッダ情報からピクチャ構造情報及び予測モード情報を読み出す。具体的には、まず、ヘッダ情報読出部211は、例えば可変長復号−逆スキャン部220から、可変長復号−逆スキャン部220において復号化されたヘッダ情報を取得する。次に、ヘッダ情報読出部211は、ヘッダ情報のピクチャ層を解析し、ピクチャの構造を示すピクチャ構造情報を読み出す。また、ヘッダ情報読出部211は、ヘッダ情報のマクロブロック層を解析し、マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す。そして、ヘッダ情報読出部211は、読み出したピクチャ構造情報及び予測モード情報を輪郭領域特定部212に送る。
【0049】
輪郭領域特定部212は、ヘッダ情報読出部211によって読み出されたピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、対象物の輪郭に相当する領域を特定する。具体的には、輪郭領域特定部212は、ヘッダ情報読出部211からピクチャ構造情報及び予測モード情報を受け付けると、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。そして、輪郭領域特定部212は、特定した領域の位置情報(例えば座標情報等)を輪郭画像生成部213に送る。
【0050】
図5は、輪郭に相当する領域の特定を説明するための図である。なお、図5は、領域特定の概念を例示するものである。図5に例示する『人』は、動きのある対象物を意味する。また、図5に例示する黒色の四角形は、対象物の輪郭に相当する領域として特定された位置に存在するマクロブロックを意味する。輪郭領域特定部212は、図5に例示するように、『人』の輪郭線上に存在するマクロブロックの位置を、対象物の輪郭に相当する領域として特定する。
【0051】
ここで、実施例1に係る輪郭領域特定部212が、動きのある対象物の輪郭に相当する領域を特定することができる理由を説明する。上述したように、実施例1に係る符号化装置100は、符号化量の比較の結果に基づいて予測モードを動的に選択し、フレーム予測モードが選択されたか、あるいは、フィールド予測モードが選択されたかを示す情報を、符号化データのヘッダ情報に格納する。すると、実施例1に係る輪郭領域特定部212は、ヘッダ情報に格納されたこの情報を解析することで、そのマクロブロックが、「閾値を上回るほどに符号化量が小さい」と判定されて符号化されたものであるのか、あるいは、そうではないと判定されて符号化されたものであるのかを特定することができる。
【0052】
ここで、動きのある対象物の輪郭は、符号化量の比較において「閾値を上回るほどに符号化量が小さい」と判定される傾向がある。一方、例えば背景や対象物の輪郭以外の部分などは、「閾値を上回るほどには符号化量が小さくならない」と判定される傾向がある。このようなことから、輪郭領域特定部212は、「閾値を上回るほどに符号化量が小さい」と判定されて符号化されたマクロブロックの画像上の位置を、動きのある対象物の輪郭に相当する領域として特定することができるのである。
【0053】
輪郭画像生成部213は、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した画像データ(輪郭画像とも称する)を生成する。具体的には、輪郭画像生成部213は、輪郭領域特定部212から対象物の輪郭に相当する領域の位置情報を受け付けると、受け付けた位置情報を用いて輪郭画像を生成し、生成した輪郭画像をフレームメモリ250に格納する。
【0054】
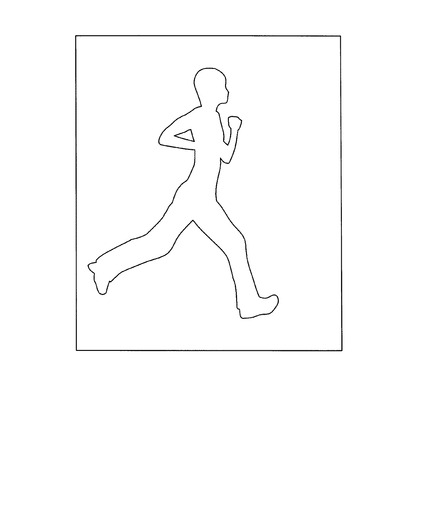
図6は、実施例1に係る輪郭画像の一例を示す図である。図6に例示するように、輪郭画像生成部213は、輪郭領域特定部212から受け付けた位置情報に基づいて、画素同士を線で結び、一部補完するなどして輪郭画像を生成する。ここで、輪郭のみが現わされた輪郭画像からは、個人を特定する情報等が大幅に削除されると考えられるので、プライバシー等の観点から有効な画像を生成することになる。なお、輪郭画像は図6の例に限られず、例えば、輪郭を囲む最小長方形等を算出し、輪郭画像として表示してもよい。
【0055】
輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像を出力部に表示する。具体的には、輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像をフレームメモリ250から取得し、取得した輪郭画像を出力部280に表示する。なお、実施例1においては、輪郭が可視化された輪郭画像のみを表示する手法を説明したが、開示の技術はこれに限られるものではなく、例えば、復号化画像と輪郭画像とを重畳させて表示してもよい。
【0056】
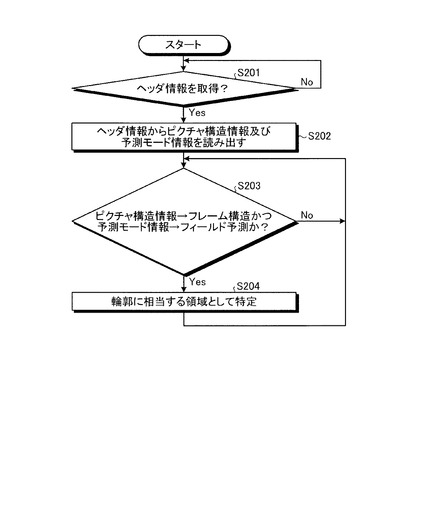
図7は、実施例1に係る輪郭抽出処理手順を示すフローチャートである。なお、図7においては、主に実施例1に係る復号化装置200に特有の輪郭抽出処理手順を示す。具体的には、まず、ヘッダ情報読出部211が、可変長復号−逆スキャン部220からヘッダ情報を取得するまで待機し(ステップS201)、ヘッダ情報を取得すると(ステップS201肯定)、ヘッダ情報を解析し、ピクチャ構造情報及び予測モード情報を読み出す(ステップS202)。
【0057】
次に、輪郭領域特定部212が、ヘッダ情報読出部211によって読み出されたピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合であるか否かを判定する(ステップS203)。
【0058】
そして、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合であると判定すると(ステップS203肯定)、輪郭領域特定部212は、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する(ステップS204)。一方、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合でないと判定すると(ステップS203否定)、輪郭領域特定部212は、輪郭に相当する領域の特定を行うことなく処理を終了する。
【0059】
なお、開示の技術は、上述した構成や処理手順に限られるものではない。例えば、符号化装置100が予測モードを動的に選択する手法として、「フレーム予測モード用」の動きベクトルが示す動き速度と閾値とを比較する手法を例示したが、この手法に限られるものではなく、動き速度と閾値との比較結果に従って予測モードを動的に選択する手法であれば、他の手法でもよい。また、例えば、復号化装置200の輪郭抽出部210が、可変長復号−逆スキャン部220からヘッダ情報を取得する手法を例示したが、この手法に限られるものではなく、例えば逆量子化−逆DCT部230から取得する等、他の部やタイミングで取得する手法であってもよい。
【0060】
[実施例1の効果]
上述したように、実施例1に係る輪郭抽出システム10は、符号化装置100及び復号化装置200を備える。符号化装置100において、動きベクトル検出部160が、対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する。また、動き補償部170が、動きベクトル検出部160によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いてマクロブロックを符号化する。また、動き補償部170が、動きベクトル検出部160によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いてマクロブロックを符号化する。そして、符号化モード判定部110が、フィールド予測モードによって符号化した場合の第1符号化量が、フレーム予測モードによって符号化した場合の第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する。また、符号化部120が、選択された予測モードに従って画像データを符号化する。一方、復号化装置200において、ヘッダ情報読出部211が、符号化データに含まれるヘッダ情報から、ピクチャ構造情報及び予測モード情報を読み出す。また、輪郭領域特定部212が、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。このようなことから、実施例1に係る輪郭抽出システム10によれば、対象物の輪郭に相当する領域を特定することが可能になり、動きのある対象物を適切に抽出することが可能になる。
【0061】
例えば、動きベクトルが検出された画像領域を移動領域とみなす従来の技術では、対象物とノイズ(蛍光灯のちらつきや木の葉の揺れ等)との区別が課題となっていた。この点、実施例1に係る輪郭抽出システム10によれば、このようなノイズは、フレーム予測モードで符号化されるので、対象物の輪郭に相当する領域との区別が可能になる。
【0062】
また、実施例1に係る復号化装置200は、輪郭画像生成部213及び輪郭画像表示部214をさらに備える。輪郭画像生成部213は、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した輪郭画像を生成する。また、輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像を出力部に出力する。このようなことから、実施例1に係る復号化装置200によれば、輪郭のみが現わされた画像を出力することが可能になり、プライバシー等の観点からも有効な画像データを提供することが可能になる。なお、輪郭画像生成部213及び輪郭画像表示部214は必ずしも必須の構成ではない。
【実施例2】
【0063】
次に、実施例2に係る輪郭抽出システム20を説明する。実施例2に係る輪郭抽出システム20は、実施例1に係る輪郭抽出システム10と同様、符号化装置100及び復号化装置200を備えるが、復号化装置200において、輪郭抽出処理を補完する機能が更に追加された点で、実施例1に係る輪郭抽出システム10と異なる。
【0064】
図8は、実施例2に係る復号化装置200の構成を示すブロック図である。図8に例示するように、実施例2に係る復号化装置200は、輪郭抽出部210に、輪郭抽出補完部215をさらに備える。輪郭抽出補完部215は、フレームメモリ250に格納された復号化画像を用いて輪郭抽出を行う。具体的には、輪郭抽出補完部215は、フレームメモリ250に格納された復号化画像に対して、1フレーム内の全領域(又は特定の領域)を走査し、例えばマクロブロック単位で動きベクトルを算出する。次に、輪郭抽出補完部215は、算出した結果から、動きベクトルが存在するマクロブロックと、動きベクトルが存在しないマクロブロック(≒0)とを特定し、動きベクトルが存在するマクロブロックや、その境界に位置づけられるマクロブロックの画像上の位置を、輪郭に相当する領域として特定する。そして、輪郭抽出補完部215は、輪郭情報(マクロブロックの画像上の位置を示す位置情報等)を輪郭画像生成部213に送る。
【0065】
実施例2に係る輪郭画像生成部213は、輪郭領域特定部212による特定結果のみならず、輪郭抽出補完部215から受け付けた輪郭情報を補完的に用いて、輪郭画像を生成する。例えば対象物が複雑な形状である場合や、対象物の動きが複雑な動きであった場合等には、輪郭領域特定部212による処理も、あるいは、輪郭抽出補完部215による処理も、必ずしも最適な結果とならない可能性がある。この点、実施例2に係る輪郭抽出システム20によれば、輪郭領域特定部212及び輪郭抽出補完部215それぞれが、異なる手法により相補的に二重の処理を行うことになるので、対象物の輪郭に相当する領域を一段と精度よく特定することが可能になる。
【0066】
例えば、輪郭画像生成部213は、輪郭領域特定部212から受け付けた位置情報がある領域において少なく、所定の閾値を下回る場合には、その領域については画素間を線で結ぶ処理に適さないとして、輪郭抽出補完部215から受け付けた輪郭情報を補完的に用いる。
【実施例3】
【0067】
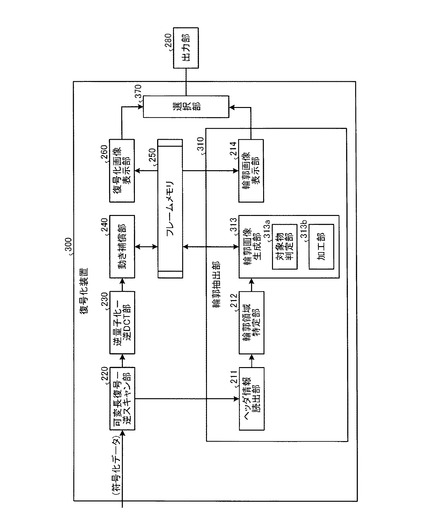
次に、実施例3に係る輪郭抽出システム30を説明する。実施例3に係る輪郭抽出システム30は、実施例1に係る輪郭抽出システム10と同様、符号化装置100を有するが、復号化装置200と異なる処理を行う復号化装置300を有する。かかる復号化装置300は、輪郭抽出処理が行われた対象物に対してプライバシー保護処理を施す点で、実施例1に係る復号化装置200と異なる。以下に、このような実施例3に係る復号化装置300について詳細に説明する。
【0068】
図9は、実施例3に係る復号化装置300の構成を示すブロック図である。図9に例示するように、実施例3に係る復号化装置300は、輪郭抽出部310と、選択部370とを有する。輪郭抽出部310は、輪郭画像生成部313を有する。かかる輪郭画像生成部313は、実施例1と同様に、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した画像データ(輪郭画像)を生成する。さらに、実施例3における輪郭画像生成部313は、図9に例示するように、対象物判定部313aと、加工部313bとを有する。
【0069】
対象物判定部313aは、輪郭画像生成部313によって生成された輪郭画像を用いて、対象物が所定の物体であるか否かを判定する。具体的には、対象物判定部313aは、輪郭画像に現されている輪郭に基づいて、かかる輪郭領域によって示される対象物が人、動物又は乗物等であるか否かを判定する。
【0070】
例えば、対象物判定部313aは、人、動物又は乗物等を示す形状のテンプレート(以下、「形状テンプレート」と表記する場合がある)を予め保持する。そして、対象物判定部313aは、対象物の輪郭と形状テンプレートとをパターンマッチング法などにより比較することにより、対象物が人、動物又は乗物等であるか否かを判定する。このとき、対象物判定部313aは、対象物の輪郭自体と形状テンプレートとを比較してもよいし、輪郭に囲まれた領域(以下、「輪郭領域」と表記する場合がある)の内部に、かかる輪郭領域を線によって表す中央線を描き、かかる中央線と形状テンプレートとを比較してもよい。
【0071】
ここで、図10を用いて、対象物判定部313aによる対象物判定処理について説明する。図10は、実施例3における対象物判定部313aによる対象物判定処理の一例を示す図である。なお、図10では、対象物判定部313aが、輪郭領域内部の中央線と形状テンプレートとを比較する例について説明する。
【0072】
図10に示した例のように、対象物判定部313aは、対象物の輪郭上の任意の点(例えば、図10中の点P)を、かかる点から輪郭領域R11内部への法線方向に所定の長さだけ移動させる。対象物判定部313aは、輪郭上の複数の点について同様の処理を行うことで、図10に例示した輪郭よりも全体的に小さい輪郭を形成する。そして、対象物判定部313aは、輪郭上の複数の点について輪郭領域R11内部へ移動させる処理を繰り返し行うことで、図10に例示したように、輪郭領域R11に中央線L11を描く。対象物判定部313aは、かかる中央線L11と形状テンプレートとを比較し、輪郭領域R11によって示される対象物が人、動物又は乗物等であるか否かを判定する。図10に示した例では、対象物判定部313aは、輪郭領域R11によって示される対象物が人であると判定する。
【0073】
なお、対象物判定部313aは、輪郭(輪郭領域内部の中央線を含む)と形状テンプレートとの比較にあたり、例えば、折れ曲がっている部分(関節に相当)の数や、枝分かれしている部分の数や、各領域の長さの比率等を比較する。例えば、対象物が人である場合には、かかる対象物は、概ねヒトデのような形状となる。したがって、対象物判定部313aは、輪郭の折れ曲がっている部分の数や枝分かれしている部分の数がヒトデと類似する場合には、対象物が人であると判定する。
【0074】
図9の説明に戻って、加工部313bは、対象物判定部313aによる判定結果に基づいて、対象物の輪郭領域に、かかる対象物を示す画像データ以外の他の画像データを配置することで、輪郭画像を加工する。例えば、加工部313bは、対象物判定部313aによって輪郭領域によって示される対象物が人であると判定された場合には、輪郭領域に一般的な人を表す画像データを配置する。また、例えば、加工部313bは、対象物判定部313aによって輪郭領域によって示される対象物が動物や乗物等であると判定された場合には、輪郭領域に一般的な動物や乗物等を示す画像データを配置する。ここで、加工部313bは、人、動物又は乗物等であることを想起することができる代替用画像を予め保持し、これらの代替用画像を輪郭領域に配置することで、輪郭画像を加工する。この代替用画像は、例えば、所定の図形の組合せや、人、動物又は乗物等を示すアニメーション画像などである。
【0075】
図11は、実施例3における加工部313bによって加工された輪郭画像の一例を示す図である。なお、図11に示した輪郭画像G12は、加工部313bによって図10に例示した輪郭画像G11が加工されたものとする。上記の通り、対象物判定部313aは、図10に例示した輪郭によって示される対象物を人であると判定する。したがって、加工部313bは、図11に例示するように、輪郭領域R11に人であることを想起することができる代替用画像を配置する。加工部313bは、このようにして輪郭画像G11を加工することで図11に例示した輪郭画像G12を生成する。なお、図11に示した例では、加工部313bは、輪郭領域R11を折れ曲がっている部分で分断し、分断後の領域毎に、かかる領域の大きさに対応する図形(円形や楕円形や長方形等)を配置している。具体的には、加工部313bは、円形や楕円形や長方形等の各図形を保持しており、分断後の領域と保持している各図形とをパターンマッチング法などにより比較し、マッチする図形を分断後の領域に配置する。
【0076】
図9の説明に戻って、選択部370は、輪郭画像表示部214から加工部313bにより加工された輪郭画像を受け付けるとともに、復号化画像表示部260から復号化画像を受け付け、受け付けた輪郭画像又は復号化画像のいずれか一方の画像を出力部280に表示したり、双方の画像を重畳した重畳画像を出力部280に表示したりする。
【0077】
例えば、実施例3に係る復号化装置300が各管理者等からログインされるシステムであるものとする。かかる場合に、選択部370は、例えば、全ての画像を閲覧することが許可されている管理者等によってログインされている場合には、復号化画像表示部260から受け付けた復号化画像を出力部280に表示する。また、例えば、選択部370は、画像に写っている人、動物(ペット)又は乗物のナンバー等を閲覧することが許可されていない管理者等によってログインされている場合には、輪郭画像と復号化画像とを重畳した重畳画像を出力部280に表示する。
【0078】
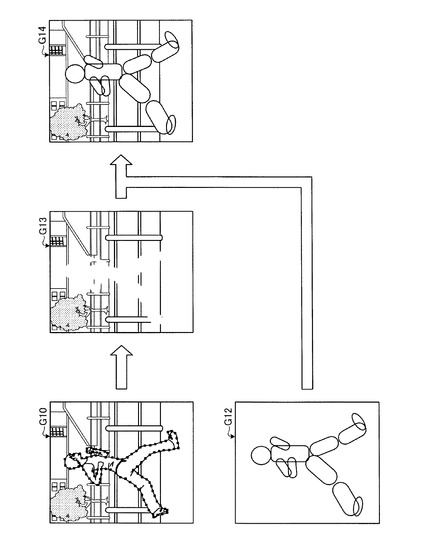
ここで、図12を用いて、選択部370による重畳画像の生成処理について説明する。図12は、実施例3における選択部370による重畳画像生成処理の一例を示す図である。図12に示した例において、選択部370は、復号化画像表示部260から復号化画像G10を受け付けるとともに、輪郭画像表示部214から輪郭画像G12を受け付ける。このとき、選択部370は、復号化画像G10から輪郭領域を取り除くことにより、背景画像G13を生成する。例えば、選択部370は、復号化画像G10における輪郭領域内の全画素を所定の画素(例えば、『白』を示す画素値「1」等)にすることで、背景画像G13を生成する。そして、選択部370は、図12に例示するように、背景画像G13に輪郭画像G12を重畳することで、重畳画像G14を生成する。選択部370は、このようにして生成した重畳画像G14を出力部280に表示する。
【0079】
これにより、選択部370は、人等のプライバシーが保護された重畳画像を表示することができる。さらに、加工部313bが、人、動物又は乗物等であることを想起することができる代替用画像を用いて輪郭画像を加工するので、選択部370は、加工部313bによって加工された輪郭画像から生成した重畳画像を表示する場合であっても、復号化画像に描出されていた対象物と異なる対象物を想起させるような画像を表示することはない。すなわち、実施例3に係る復号化装置300は、復号化画像に描出されていた対象物と同一の人、動物又は乗物等であることを想起させることができるとともに、かかる対象物のプライバシーを保護することができる。
【0080】
なお、上記の輪郭画像生成部313によって特定される輪郭領域と、加工部313bによって用いられる代替用画像が占める領域とは、必ずしも一致するとは限らない。すなわち、図12に示した例において、選択部370によって復号化画像G10から取り除かれる輪郭領域(背景画像G13を参照)は、加工部313bによって用いられる代替用画像の領域(輪郭画像G12を参照)と一致するとは限らない。このため、対象物を示す輪郭領域が代替用画像の領域よりも大きい場合には、重畳画像G14の一部分は、所定の画素(例えば、『白』を示す画素値「1」等)となり、対象物も背景も描出されない可能性がある。
【0081】
そこで、実施例3における加工部313bは、輪郭領域よりも代替用画像の占める領域が大きくなるように代替用画像を拡大してもよい。具体的には、加工部313bは、輪郭領域と代替用画像とを比較し、代替用画像が対象物の輪郭の全てを覆うことができるように代替用画像を拡大する。これにより、加工部313bは、重畳画像G14の一部分に対象物及び背景が描出されなくなることを防止できる。
【0082】
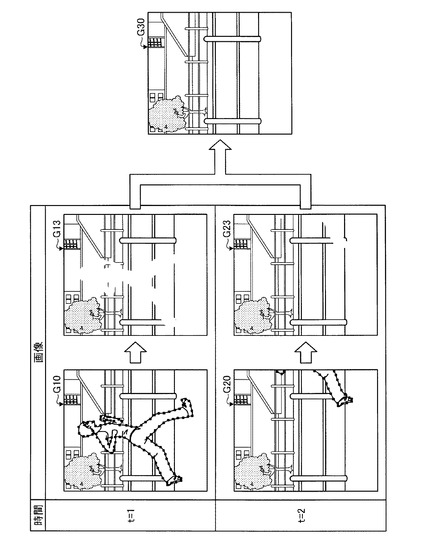
また、重畳画像の一部分に対象物及び背景が描出されないことを防止するために、選択部370が、重畳画像を生成する際に、複数の復号化画像から背景画像を補完してもよい。この点について、図13を用いて具体的に説明する。図13は、実施例3における選択部370による重畳画像生成処理の一例を示す図である。図13に示した例において、時間t=1は、時間t=2よりも過去であるものとする。
【0083】
選択部370は、時間t=2において受け付けた復号化画像G20から背景画像を生成する場合に、過去の復号化画像G10も用いる。具体的には、選択部370は、時間t=2に対応する復号化画像G20から対象物の輪郭領域を取り除くことにより背景画像G23を生成し、時間t=2よりも過去である時間t=1に受け付けた復号化画像G10から対象物の輪郭領域を取り除くことにより背景画像G13を生成する。そして、選択部370は、背景画像G23のうち、輪郭領域(例えば、画素値を「1」とした領域)に背景画像G13の画素を配置することにより、背景画像G30を生成する。具体的には、選択部370は、背景画像G23の輪郭領域に、かかる輪郭領域に対応する位置における背景画像G13の画素を配置する。このように、選択部370は、対象物が移動することを利用して、時相の異なる複数の復号化画像から、画素値「1」等に置き換えられた領域を含まない背景画像を生成する。選択部370は、このような背景画像G30に、加工部313bによって加工された輪郭画像を重畳させることにより、重畳画像の一部分に対象物及び背景が描出されなくなることを防止できる。
【0084】
次に、図14を用いて、実施例3に係る復号化装置300による処理の手順について説明する。図14は、実施例3に係る画像生成処理手順を示すフローチャートである。なお、図14においては、輪郭領域特定部212によって輪郭に相当する領域が特定されているものとする。
【0085】
輪郭画像生成部313は、輪郭領域特定部212によって対象物の輪郭に相当する領域が特定された場合に、かかる輪郭の領域に基づいて対象物の輪郭画像を生成する(ステップS301)。続いて、対象物判定部313aは、輪郭画像生成部313によって生成された輪郭画像に基づいて、対象物が人、動物又は乗物等であるか否かを判定する(ステップS302)。
【0086】
続いて、加工部313bは、対象物判定部313aによって対象物が人等であると判定された場合に(ステップS302肯定)、代替用画像を用いて、対象物判定部313aによって生成された輪郭画像を加工する(ステップS303)。このとき、加工部313bは、対象物判定部313aによって判定された対象物の種類(人、動物又は乗り物等)に対応する代替用画像を用いる。
【0087】
続いて、選択部370は、復号化画像表示部260によって生成された復号化画像から対象物の輪郭領域を取り除くことにより、背景画像を生成する(ステップS304)。そして、選択部370は、背景画像に対して、加工部313bによって加工された輪郭画像を重畳することで、重畳画像を生成する(ステップS305)。
【0088】
上述してきたように、実施例3に係る復号化装置300は、対象物判定部313aが、輪郭画像生成部313によって生成された輪郭画像を用いて、対象物が所定の物体であるか否かを判定し、加工部313bが、対象物判定部313aによる判定結果に基づいて、対象物の輪郭領域に、かかる対象物を示す画像データ以外の他の画像データを配置することで輪郭画像を加工する。これにより、実施例3に係る復号化装置300は、動きのある対象物のプライバシーを保護することができる。
【0089】
なお、上記実施例3では、加工部313bが、図11に例示したような代替用画像を用いて輪郭画像を加工する例を示した。しかし、加工部313bによる加工処理は、代替用画像を用いた例に限られない。以下に、加工部313bによる加工処理についていくつか例を挙げて説明する。
【0090】
例えば、加工部313bは、対象物の輪郭領域に所定の画素(例えば、『黒』を示す画素値「0」等)を配置することで、特定の人、動物又は乗物等を特定されないようにしてもよい。このとき、加工部313bは、対象物の種類に応じて輪郭領域に配置する画素値を変更してもよい。例えば、加工部313bは、対象物が人である場合には、輪郭領域に『黒』を示す画素値を配置し、対象物が動物である場合には、輪郭領域に『青』を示す画素を配置してもよい。
【0091】
また、加工部313bは、対象物の輪郭領域について二値化処理を施してもよい。具体的には、加工部313bは、輪郭領域に含まれる各画素値について、所定の閾値以上であるか否かを判定する。そして、加工部313bは、画素値が所定の閾値以上である領域については画素値を「1」とし、画素値が所定の閾値よりも小さい領域については画素値を「0」とする。これにより、加工部313bは、対象物を2種類の画素値によって現すことが可能になり、この結果、対象物が何であるかを想起しやすくすることができる。
【0092】
また、加工部313bは、対象物の輪郭領域に含まれる画素の配置を変更することで、特定の人、動物又は乗物等を特定されないようにしてもよい。具体的には、加工部313bは、輪郭領域を所定のマクロブロック(例えば、横16×縦16画素)毎に分割し、マクロブロック内で画素の位置を変更してもよい。例えば、加工部313bは、輪郭領域をマクロブロックM1〜M10に分割した場合に、マクロブロックM1に含まれる各画素の配置をマクロブロックM1内で変更する。加工部313bは、同様の処理をマクロブロックM2〜M10についても行う。なお、加工部313bによる画素の配置変更処理は、任意の手法を適用することができる。例えば、加工部313bは、横方向に隣接する2個の画素の位置を変更してもよいし、縦方向に隣接する2個の画素の位置を変更してもよい。また、例えば、加工部313bは、画素の配置を変更するのではなく、マクロブロック(マクロブロックM1等)内の全画素値の平均値を算出し、算出した画素値をマクロブロックに配置してもよい。
【0093】
また、加工部313bは、対象物の輪郭領域に含まれる画素値を変更することで、特定の人、動物又は乗物等を特定されないようにしてもよい。すなわち、加工部313bは、輪郭領域に含まれる画素値を変更することで、対象物の色合いを変更する。例えば、加工部313bは、対象領域が人である場合に、対象領域のうち顔を示す領域、胴体を示す領域、手足を示す領域を特定する。そして、加工部313bは、顔を示す領域については、全てを同一画素値に置き換え、胴体を示す領域や手足を示す領域については、かかる領域の画素値に所定の画素値を加算又は減算する。これにより、加工部313bは、対象物の顔が特定されず、かつ、対象物の服や皮膚の色を変更することができる。この結果、加工部313bは、対象物が所定の人物であると特定されることを防止できるので、対象物のプライバシーを保護することができる。
【0094】
また、例えば、加工部313bは、顔を示す領域については、上記例のように画素の配置を変更してもよい。これにより、加工部313bは、対象物の顔をやや異なる顔に変更することができ、対象物が所定の人物であると特定されることを防止できる。また、例えば、加工部313bは、顔を示す領域のうち、眉毛、目、鼻、口等を示す領域を特定し、特定した眉毛、目、鼻、口等の位置や変更してもよい。例えば、加工部313bは、眉毛を頭頂部方向に移動させることで額を狭くしたり、目や鼻や口の大きさを変更したりする。これにより、加工部313bは、対象物が所定の人物であると特定されることを防止できる。
【実施例4】
【0095】
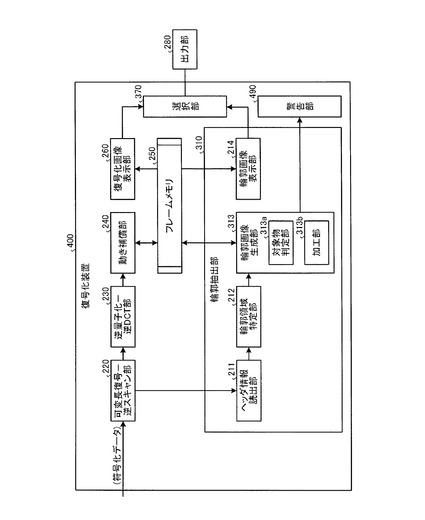
次に、実施例4に係る輪郭抽出システム40を説明する。実施例4に係る輪郭抽出システム40は、監視システムに適用され、実施例3に係る輪郭抽出システム30と同様、符号化装置100を有するが、復号化装置300と異なる処理を行う復号化装置400を有する。かかる復号化装置400は、輪郭抽出処理が行われた対象物の移動量に基づいて、監視者等に警告を通知する点で、実施例3に係る復号化装置300と異なる。以下に、このような実施例4に係る復号化装置400について詳細に説明する。
【0096】
図15は、実施例4に係る復号化装置400の構成を示すブロック図である。図15に例示するように、実施例4に係る復号化装置400は、警告部490をさらに有する。警告部490は、輪郭画像生成部313によって生成された輪郭画像を取得し、かかる輪郭画像に現されている輪郭の移動量を監視する。そして、警告部490は、輪郭の移動量が所定の閾値以上である場合や、輪郭の移動量が所定の閾値以下である場合に、監視者等に警告を通知する。
【0097】
このような警告部490が警告を通知する条件は、実施例4に係る輪郭抽出システム40が適用されるシステムによって異なる。以下に、輪郭抽出システム40が適用されるいくつかのシステムと、警告部490による処理の一例について説明する。
【0098】
まず、実施例4に係る輪郭抽出システム40が、老人や患者等を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、例えば、老人が居住する部屋や、患者が入院している病室等に設置され、老人や患者等を撮影する。そして、輪郭抽出システム40の符号化装置100は、監視カメラから送信される画像データに対して、実施例1〜3に示した各種処理を行う。また、復号化装置400は、符号化装置100から送信される符号化データを用いて、対象物である老人や患者の輪郭を適切に抽出する。
【0099】
ここで、復号化装置400の警告部490は、輪郭画像生成部313によって輪郭画像が生成されるたびに、かかる輪郭画像を取得する。そして、警告部490は、撮影時刻の異なる画像データから生成された輪郭画像内の輪郭を比較することにより、輪郭間の距離を求める。このとき、警告部490は、所定時間(例えば、1時間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、算出した移動量が所定の閾値以下である場合に、警告を通知する。これは、老人や患者等が数時間も移動せずに停止している場合には、老人や患者等に何かしらの異変が発生したと考えられるからである。
【0100】
なお、警告部490は、上記例において、所定の時間帯についてのみ警告の通知処理を行ってもよい。例えば、就寝中の老人や患者はほとんど移動しないと考えられるので、警告部490は、老人や患者が寝ていると考えられる時間帯については警告の通知処理を行わずに、老人や患者が起床していると考えられる時間帯のみ警告の通知処理を行ってもよい。また、例えば、就寝中の老人や患者が激しく移動した場合には、何かしらの異変が発生したとも考えられる。したがって、警告部490は、老人や患者が寝ていると考えられる時間帯については、老人や患者等の移動量が所定の閾値以上である場合に、警告を通知してもよい。
【0101】
このように、輪郭抽出システム40は、老人や患者等を監視する監視システムに適用されることで、老人や患者等の異変を適切に検出することができる。なお、老人や患者等は、私生活を監視される監視カメラが設置されることに抵抗を感じる可能性がある。しかし、輪郭抽出システム40の復号化装置400は、実施例3において説明したように、対象物を代替用画像等に置き換えるので、老人や患者等のプライバシーを保護することができる。この結果、輪郭抽出システム40は、老人や患者等に抵抗感を与えることなく、上記のような監視システムに適用することができる。
【0102】
続いて、実施例4に係る輪郭抽出システム40が、エレベータや電車やタクシー等の不特定の人に利用される乗物等の内部を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、エレベータ内や電車内やタクシー内等に設置され、エレベータ等の利用者を撮影する。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより輪郭間の距離を求め、所定時間(例えば、1分間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、利用者の移動量が所定の閾値以上である場合に、警告を通知する。これは、一般的に、エレベータや電車やタクシーでは利用者が激しく移動することがなく、利用者が激しく移動した場合には、エレベータ内等で何かしらの異変が発生したと考えられるからである。
【0103】
このように、輪郭抽出システム40は、乗物内部を監視する監視システムに適用されることで、乗物の利用者の異変を適切に検出することができる。また、輪郭抽出システム40は、利用者のプライバシーを保護することができるので、利用者に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0104】
続いて、実施例4に係る輪郭抽出システム40が、落石等を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、崖等を撮影可能な位置に設置される。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより輪郭間の距離を求め、所定時間(例えば、1分間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、算出した移動量が所定の閾値以上である場合に、警告を通知する。これは、一般的に、崖等では激しく移動するものがなく、激しく移動する物体が存在する場合には、落石等があったと考えられるからである。
【0105】
このように、輪郭抽出システム40は、崖等を監視する監視システムに適用されることで、落石等を適切に検出することができる。輪郭抽出システム40は、このような崖を通行する通行人等のプライバシーを保護することができるので、通行人等に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0106】
続いて、実施例4に係る輪郭抽出システム40が、駐車場を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、駐車スペースを撮影可能な位置にされる。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより、車の移動を追従する。これにより、警告部490は、駐車スペースに車が駐車しているか否かを検知することができ、この結果、駐車スペースに車が駐車している割合を通知することができる。例えば、警告部490は、所定の時間毎に、駐車スペースに車が駐車している割合を通知することができる。
【0107】
また、例えば、月極駐車場である場合には、駐車スペースに駐車される車の特徴(大きさ、色等)は予め決められていることが多い。警告部490は、駐車スペース毎に駐車される車の特徴情報を保持しておき、駐車スペースに駐車された車の輪郭や色等と、保持しておいた車の特徴とが異なる場合には、他の車が駐車されたと判定し、警告を通知してもよい。輪郭抽出システム40は、車や乗車している人のプライバシーを保護することができるので、利用者に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0108】
上記例のように、実施例4における警告部490は、動きのある対象物に関する情報を解析することで、防犯監視や防災監視として有効に機能することができる。また、例えば、復号化装置400が対象物の基準の動きを予め記憶している場合には、警告部490は、監視により得られた対象物の動きと基準の動きとを比較することにより、基準を逸脱する動きを検出することができ、警告を通知することができる。また、警告部490は、対象物単体として、あるいは単体化した複数の対象物として、基準を逸脱する動きを検出した場合に、異常行動(事件もしくは事故)を検出することもできる。
【0109】
また、例えば、警告部490は、対象物が「静」の状態から「動」の状態へと変化したことを検知することにより、例えば小さな前触れ現象を検知することができる。また、例えば、警告部490は、対象物が「動」の状態から「静」の状態へと変化したことを検知することにより、例えば、交通事故の瞬間や因果関係などを明確にすることができる。
【0110】
以上のように、実施例4に係る復号化装置400は、警告部490が、輪郭の移動量を算出し、算出した移動量が所定の閾値以上であるか、又は、移動量が所定の閾値以下である場合に、警告を通知する。これにより、実施例4に係る復号化装置400は、老人や患者、乗物内の利用者等の異変を適切に検出することができる。
【実施例5】
【0111】
これまで、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの実施例として実施例1〜4を説明してきたが、開示の技術はこれに限られるものではなく、種々の異なる形態にて実施されてよいものである。実施例5では、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの他の実施例について説明する。
【0112】
[移動カメラ]
開示の技術に係る輪郭抽出システムは、画像データが、例えば移動するカメラによって収集された画像データである場合にも、同様に適用することができる。この場合には、背景となる部分からも動きベクトルが検出されることになるので、符号化装置は、背景となる部分から検出される動きベクトルを差し引いた後の「局所的な動きベクトル」のみを用いて上記処理を行う必要がある。
【0113】
例えば、動きベクトル検出部160は、基本となる動きベクトルと同じ動きベクトルであるか、あるいはそれ以外の動きベクトルであるかを判別して動作する。言い換えると、動きベクトル検出部160は、動きベクトルとして同じ値が繰り返されるのか、あるいはそれ以外の値となるのかを判別して動作する。ここで、動きベクトル検出部160は、動きベクトルの予測において、全体の中から予測としてより正しいものがどこにあるかを探索するが、この時、背景となる部分の動きベクトルは、一定のものが繰り返し利用されることになる。このため、動きベクトル検出部160は、繰り返し利用される動きベクトルとは異なる動きベクトルが予測として最も正しいものとして探索された場合に、背景以外の部分から検出された動きベクトルであると判別することができる。
【0114】
[システムの構成]
上記実施例1〜4においては、輪郭抽出システムが、符号化装置及び復号化装置の双方を備える例を説明したが、開示の技術はこれに限られるものではなく、運用の形態に応じてその構成は任意に変更することが可能である。以下、例を挙げて説明する。
【0115】
まず、開示の技術は、予測モードを動的に選択して符号化された符号化データと、この符号化データに含まれるヘッダ情報を解析することにより対象物の輪郭を抽出する構成とがあれば、実現することができる。言い換えると、符号化装置を備えることは必須ではなく、開示の技術は、少なくとも、符号化データの入力を受け付けて輪郭を抽出する輪郭抽出装置があれば、実現することができる。また、少なくとも輪郭を抽出することができればよいので、いわゆる公知の技術による復号化の機能を備えることも必須ではない。すなわち、輪郭抽出処理を行う輪郭抽出装置は、少なくとも、符号化データに含まれるヘッダ情報を解析し、対応するマクロブロックの画像上の位置から輪郭に相当する領域を特定する機能を備えればよい。また、例えば、符号化処理の機能と輪郭抽出処理の機能とが物理的に同一の1つの筐体に備えられていてもよい。
【0116】
さらに、上記実施例1〜4においては、輪郭抽出システムが、輪郭画像を出力部に表示したり、輪郭画像と復号化画像との重畳画像を出力部に出力する手法を例示したが、開示の技術はこれに限られるものではない。例えば、特定した領域に関する情報を輪郭画像として画像化することは必須ではなく、単に記憶部に保持してもよい。必要に応じてこの情報を画像化してもよいし、画像化することなくデータを直接解析することにより何らかの情報を得てもよい。なお、輪郭抽出処理の機能を備える装置に、インターネット等のネットワーク接続用の高速I/Fを付帯することで、抽出した輪郭に関する情報をリアルタイムに伝送することが可能である。
【0117】
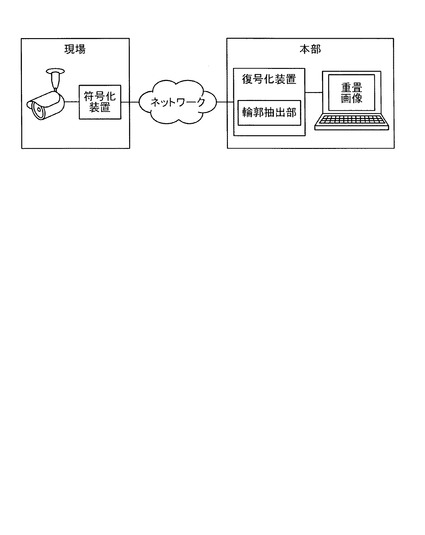
[監視システムへの適用]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、実施例4において説明したように、監視システムに適用することが可能である。図16は、開示の技術に係る輪郭抽出システムを監視システムに適用した例を説明するための図である。例えば、図16に例示するように、開示の技術は、監視の現場に符号化装置を設置し、監視の現場とネットワークを介して接続された本部に復号化装置を設置することにより、監視システムに適用することもできる。なお、図16において、説明の便宜上監視の現場は1つであるが、例えば、複数の監視の現場を本部が集中的に管理する構成であってもよい。
【0118】
また、図16には例示していないが、例えば、監視の現場に設置された装置にも輪郭抽出の機能を装備させ、監視の現場と本部とで、輪郭抽出処理の機能分担を行ってもよい。例えば、監視の現場においては、輪郭抽出の結果を短時間の単位で分析し、主に、突然の動きや運動量の大きな動き等の特異な動きを検出し、アラーム情報の通知やアクションを行う。一方、本部においては、輪郭抽出の結果を長時間の単位で分析し、問題となるような動きを蓄積データから抜き出す処理を行う。このように、連携動作を行ってもよい。
【0119】
[機器制御]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、機器制御に適用することが可能である。例えば、装置は、動きのある対象物として機器の外観を監視し、監視により得られた対象物の動きと基準の動きとを比較することにより、基準を逸脱する動きを検出する。例えば、ロボットの動作品質管理等に適用することができる。
【0120】
[身体動き、スポーツ解析]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、スポーツの解析等に適用することが可能である。例えば、装置は、好調時の身体の動きを予め記憶しておき、身体の動きを監視し、監視により得られた身体の動きと好調時の身体の動きとを比較することにより、問題点を定量的に分析する。
【0121】
[好意度や好感度の判定]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、好意度や好感度の判定等に適用することが可能である。例えば、装置は、群衆やグループ等の集合的な振る舞いを検知、解析し、滞在時間や人々の眼球の動き等を解析することで、例えば、表示中の情報に対する集中度を定量的に分析する。
【0122】
[その他]
また、上記実施例1及び実施例2において検出した対象物の動きをより詳細に解析することも可能である。例えば、対象物の動きを、背景や相対的な手足の長さなどからパターン化し、対象物が人間であるか動物であるかを判定する。また、例えば、対象物の動きを、輪郭の特定に用いられたマクロブロックの動きベクトルが一定値であるか否かに応じて、対象物が、人間であるか電車・車両等であるかを判定する。
【0123】
[画像データの種類]
また、開示の技術が扱う画像データの種類は、上記実施例1及び実施例2において例示したMPEG−2、MPEG−4 AVC/H.264等に限られず、フレーム予測モードとフィールド予測モードとを動的に選択する手法を用いて符号化された画像データであれば、他の種類の画像データであってもよい。
【0124】
[符号化プログラム及び復号化プログラム]
また、上記実施例において説明した符号化方法及び輪郭抽出方法は、符号化プログラムによる情報処理又は輪郭抽出プログラムによる情報処理がコンピュータを用いて具体的に実現されることで実行されてもよい。コンピュータは、例えば、CPU(Central Processing Unit)と、システムメモリと、ハードディスクドライブインタフェースと、ディスクドライブインタフェースと、シリアルポートインタフェースと、ビデオアダプタと、ネットワークインタフェースとを有し、これらの各部はシステムバスによって接続される。システムメモリは、ROM(Read Only Memory)及びRAM(Random Access Memory)を含む。ROMは、例えば、BIOS(Basic Input Output System)等のブートプログラムを記憶する。ハードディスクドライブインタフェースは、ハードディスクドライブに接続される。ディスクドライブインタフェースは、ディスクドライブに接続される。例えば磁気ディスクや光ディスク等の着脱可能な記憶媒体が、ディスクドライブに挿入される。シリアルポートインタフェースは例えば、マウス、キーボードに接続される。ビデオアダプタは、例えば、モニタに接続される。
【0125】
ここで、ハードディスクドライブは、例えば、OS(Operating System)、アプリケーションプログラム、プログラムモジュール、プログラムデータを記憶する。すなわち、開示の技術に係る符号化プログラムは、コンピュータによって実行される指令が記述されたプログラムモジュールとして、例えばハードディスクに記憶される。具体的には、上記実施例で説明した動きベクトル検出部160と同様の処理を実行する手順と、動き補償部170と同様の処理を実行する手順と、符号化モード判定部110と同様の処理を実行する手順と、符号化部120と同様の処理を実行する手順とが記述されたプログラムモジュールが、ハードディスクに記憶される。
【0126】
また、開示の技術に係る輪郭抽出プログラムは、コンピュータによって実行される指令が記述されたプログラムモジュールとして、例えばハードディスクに記憶される。具体的には、上記実施例で説明したヘッダ情報読出部211と同様の処理を実行する手順と、輪郭領域特定部212と同様の処理を実行する手順とが記述されたプログラムモジュールが、ハードディスクに記憶される。そして、CPUが、ハードディスクに記憶されたプログラムモジュールやプログラムデータを必要に応じてRAMに読み出し、上記手順を実行する。
【0127】
なお、符号化プログラムに係るプログラムモジュールやプログラムデータ、又は、輪郭抽出プログラムに係るプログラムモジュールやプログラムデータは、ハードディスクに記憶される場合に限られず、例えば着脱可能な記憶媒体に記憶され、ディスクドライブ等を介してCPUによって読み出されてもよい。あるいは、符号化プログラムに係るプログラムモジュールやプログラムデータ、又は、輪郭抽出プログラムに係るプログラムモジュールやプログラムデータは、ネットワーク(LAN(Local Area Network)、WAN(Wide Area Network)等)を介して接続された他のコンピュータに記憶され、ネットワークインタフェースを介してCPUによって読み出されてもよい。
【符号の説明】
【0128】
10、20、30、40 輪郭抽出システム
100 符号化装置
200 復号化装置
210 輪郭抽出部
211 ヘッダ情報読出部
212 輪郭領域特定部
213 輪郭画像生成部
214 輪郭画像表示部
215 輪郭抽出補完部
270 選択部
280 出力部
300 復号化装置
310 輪郭抽出部
313 輪郭画像生成部
313a 対象物判定部
313b 加工部
370 選択部
400 復号化装置
490 警告部
【技術分野】
【0001】
本発明の実施形態は、輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムに関する。
【背景技術】
【0002】
近年、世界中には膨大な数の監視カメラが設置され、動きのある対象物を撮影した動画像が日々記録されている。もっとも、記録された動画像の解析が人手によって行われる場合、その解析内容には限界がある。このため、従来、様々な画像解析技術が提案されている。例えば、動きベクトルが検出された画像領域を移動領域とみなして動きのある対象物を抽出する技術や、この技術を前提に更にノイズの除去を行う技術等が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−250118号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の技術では、動きのある対象物のプライバシーが保護されているとはいえない場合があった。例えば、世界中に設置されている監視カメラは、不特定の人を撮影する可能性があるが、監視目的といってもプライバシーの観点から撮影可能なエリアは限定させるべきである。
【0005】
本発明は、上記に鑑みてなされたものであって、動きのある対象物のプライバシーを保護することが可能な輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態に係る輪郭抽出システムは、符号化装置と、復号化装置とを有する。符号化装置は、対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する検出部と、前記検出部によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフィールド予測モード符号化部と、前記検出部によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフレーム予測モード符号化部と、前記フィールド予測モード符号化部によって前記マクロブロックを符号化した場合の第1符号化量と、前記フレーム予測モード符号化部によって前記マクロブロックを符号化した場合の第2符号化量とを比較し、比較の結果、第1符号化量が第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、前記マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する選択部と、前記選択部によって選択された予測モードに従って前記画像データを符号化する符号化部とを備え、復号化装置は、前記符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域の画像データを他の画像データに加工する加工部とを備えることを特徴とする。
【0007】
また、実施形態に係る輪郭抽出装置は、対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工部とを備えることを特徴とする。
【0008】
また、実施形態に係る輪郭抽出プログラムは、対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出手順と、前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定手順と、前記特定手順によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定手順と、前記対象物判定手順によって前記対象物が示す物体を判定された場合に、前記特定手順によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工手順とをコンピュータに実行させることを特徴とする。
【発明の効果】
【0009】
実施形態に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムによれば、動きのある対象物のプライバシーを保護することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、実施例1に係る輪郭抽出システムの概要を説明するための図である。
【図2】図2は、実施例1に係る符号化装置の構成を示すブロック図である。
【図3】図3は、実施例1に係る符号化処理手順を示すフローチャートである。
【図4】図4は、実施例1に係る復号化装置の構成を示すブロック図である。
【図5】図5は、輪郭に相当する領域の特定を説明するための図である。
【図6】図6は、実施例1に係る輪郭画像の一例を示す図である。
【図7】図7は、実施例1に係る輪郭抽出処理手順を示すフローチャートである。
【図8】図8は、実施例2に係る復号化装置の構成を示すブロック図である。
【図9】図9は、実施例3に係る復号化装置の構成を示すブロック図である。
【図10】図10は、実施例3における対象物判定部による対象物判定処理の一例を示す図である。
【図11】図11は、実施例3における加工部によって加工された輪郭画像の一例を示す図である。
【図12】図12は、実施例3における選択部による重畳画像生成処理の一例を示す図である。
【図13】図13は、実施例3における選択部による重畳画像生成処理の一例を示す図である。
【図14】図14は、実施例3に係る画像生成処理手順を示すフローチャートである。
【図15】図15は、実施例4に係る復号化装置の構成を示すブロック図である。
【図16】図16は、開示の技術に係る輪郭抽出システムを監視システムに適用した例を説明するための図である。
【発明を実施するための形態】
【0011】
以下、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの実施例を説明する。なお、以下の実施例により本発明が限定されるものではない。
【実施例1】
【0012】
[実施例1に係る輪郭抽出システム10の概要]
図1は、実施例1に係る輪郭抽出システム10の概要を説明するための図である。図1に例示するように、実施例1に係る輪郭抽出システム10は、符号化装置100及び復号化装置200を備え、符号化装置100において符号化処理が実行され、復号化装置200において復号化処理及び輪郭抽出処理が実行される構成を採る。
【0013】
まず、実施例1に係る符号化装置100において実行される符号化処理の概要を説明する。符号化装置100は、対象物が描出された画像データの入力を受け付け、受け付けた画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する。続いて、符号化装置100は、検出した動きベクトルを用いて各種符号化モード(Intraモード、フレーム予測モード、フィールド予測モード)による符号化を行い、それぞれの符号化量(符号化データの発生量)に基づいて予測モードを選択する。そして、符号化装置100は、選択した予測モードに従って画像データを符号化する。
【0014】
ここで、実施例1に係る符号化装置100は、予測モードを選択するための閾値を予め設定されることで記憶している。そして、符号化装置100は、符号化量を予測モード間で比較する際にこの閾値を用い、比較の結果に基づいて予測モードを選択する。具体的には、符号化装置100は、符号化量を予測モード間で比較した結果、フィールド予測モードによる符号化量が、フレーム予測モードによる符号化量に比較して閾値以上小さいと判定されたことを条件として、フィールド予測モードを選択する。
【0015】
なお、予測モードについて簡単に説明しておくと、例えば、MPEG(Moving Picture Experts Group)で標準化されたMPEG−2、MPEG−4 AVC/H.264などにおいては、符号化方式として、フレーム間予測方式を採用している。フレーム間予測方式は、入力フレームと前後のフレームとは相関度が高いという動画像の性質を利用して、前後のフレームから入力フレームを予測した予測フレームを生成し、生成した予測フレームと入力フレームとの差分を符号化する方式である。具体的には、符号化装置は、フレームを構成する予測単位毎に差分を算出して動きベクトルを検出し、検出した動きベクトル、及び、予測フレームと入力フレームとの差分である差分画像データを符号化して符号化データを生成し、生成した符号化データを復号化装置に送信する。
【0016】
ここで、MPEG−2、MPEG−4 AVC/H.264等においては、動画像がインタレース形式の場合に、マクロブロックの符号化に用いる予測モードとして、フレーム予測モード及びフィールド予測モードの動的選択を規定している。フレーム予測モードは、マクロブロック(横16×縦16画素)毎に1つの動きベクトルを割り当てるモードである。一方、フィールド予測モードは、マクロブロックのトップフィールド成分(横16×縦8画素)及びボトムフィールド成分(横16×縦8画素)それぞれに動きベクトルを割り当てるモードである。なお、フレーム予測モード及びフィールド予測モードは動的に選択されるので、ピクチャ構造は、フレーム構造となる。なお、標準において動的選択を規定しているものの、一般的にはフレーム予測モードが固定的に選択されることが多いが、その理由は、通常、フレーム予測モードの方が、符号化処理の計算量が少なく、より高い圧縮率が得られる傾向にあるからと考えられる。
【0017】
さて、図1に戻り、実施例1に係る復号化装置200において実行される輪郭抽出処理の概要を説明する。復号化装置200は、符号化装置100から符号化データを受信し、受信した符号化データに含まれるヘッダ情報からピクチャ構造情報及び予測モード情報を読み出す。そして、復号化装置200は、読み出したピクチャ構造情報及び予測モード情報に基づいて、対象物の輪郭に相当する領域を特定する。なお、ピクチャ構造情報とは、ピクチャの構造を示す情報であり、予測モード情報とは、マクロブロックの符号化に用いられた予測モードを示す情報である。例えば、ピクチャ構造情報は、ヘッダ情報のピクチャ層に格納されており、予測モード情報は、マクロブロック層に格納されている。
【0018】
ここで、実施例1に係る復号化装置200は、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、図1に例示するように、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を、対象物の輪郭(対象物と背景との境界部分等)に相当する領域として特定する。
【0019】
このようなことから、実施例1に係る輪郭抽出システム10によれば、対象物の輪郭に相当する領域を特定することが可能になり、動きのある対象物を適切に抽出することが可能になる。
【0020】
[実施例1に係る符号化装置100の構成]
次に、図2及び図3を用いて、実施例1に係る符号化装置100の構成を説明する。図2は、実施例1に係る符号化装置100の構成を示すブロック図である。図2に例示するように、実施例1に係る符号化装置100は、特に、符号化モード判定部110と、符号化部120と、可変長復号−逆スキャン部130と、逆量子化−逆DCT(Discrete Cosine Transform)部140と、フレームメモリ150と、動きベクトル検出部160と、動き補償部170と、減算器180とを備える。
【0021】
ここで、実施例1に係る符号化装置100は、公知の符号化装置と同様の機能を有する。この点について簡単に説明すると、まず、符号化装置100は、対象物が描出された画像データの入力を受け付けると、この入力フレームをマクロブロック毎に分割し、動きベクトル検出部160に入力する。動きベクトル検出部160は、フレームメモリ150に格納されている参照フレームと入力フレームとの差分をマクロブロック毎に算出して動きベクトルを検出し、検出した動きベクトルを動き補償部170に送る。
【0022】
動き補償部170は、動きベクトル検出部160から送られた動きベクトルとフレームメモリ150に格納されている参照フレームとを用いて予測フレームを生成し、生成した予測フレームを減算器180に送る。減算器180は、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化モード判定部110に送る。
【0023】
符号化モード判定部110は、入力フレーム及び差分画像データそれぞれの入力を受け付け、符号化モードとして、入力フレームを符号化するIntraモードを選択するか、あるいは、差分画像データを符号化するInterモードを選択するかを判定する。そして、符号化モード判定部110は、判定結果を、符号化に必要なデータ(入力フレーム、あるいは、差分画像データ及び動きベクトル等)とともに、符号化部120に送る。
【0024】
符号化部120は、符号化モード判定部110から受け付けた判定結果に従って、符号化モード判定部110から受け付けたデータを符号化し、符号化データ(ストリームとも称する)を生成する。そして、符号化部120は、生成した符号化データを復号化装置200に向けて出力するとともに、可変長復号−逆スキャン部130に出力する。すると、可変長復号−逆スキャン部130及び逆量子化−逆DCT部140は、符号化データを復号化し、復号化した画像データを参照フレームとしてフレームメモリ150に格納する。なお、上記各部による処理は、いずれもマクロブロック毎に行われる。
【0025】
さて、ここで、実施例1に係る符号化装置100は、上述した公知の符号化装置が有する機能に加え、予測モードを選択するための閾値を予め設定されることで記憶し、符号化量を予測モード間で比較する際にこの閾値を用い、比較の結果に基づいて予測モードを選択する機能を有する。
【0026】
この点について説明する。まず、実施例1に係る符号化装置100は、マクロブロックの符号化に用いる予測モードとして、フレーム予測モード及びフィールド予測モードを動的に選択する。このため、実施例1に係る動きベクトル検出部160は、フレーム予測モード用の動きベクトル検出処理と、フィールド予測モード用の動きベクトル検出処理との双方を行う。すなわち、動きベクトル検出部160は、フレームメモリ150に格納された参照フレームを参照し、マクロブロック(横16×縦16画素)毎に1つの動きベクトルを割り当てる処理と、フレームメモリ150に格納された参照フレームのトップフィールド及びボトムフィールドそれぞれを参照し、マクロブロックのトップフィールド成分(横16×縦8画素)及びボトムフィールド成分(横16×縦8画素)それぞれに動きベクトルを割り当てる処理との双方を行う。そして、動きベクトル検出部160は、フレーム予測モード用の動きベクトル及びフィールド予測モード用の動きベクトルの双方を、動き補償部170に対して出力する。
【0027】
ここで、実施例1に係る動き補償部170は、図2に例示するように、Intra符号化部170aと、フレーム予測モード符号化部170bと、フィールド予測モード符号化部170cとを有する。Intra符号化部170a、フレーム予測モード符号化部170b、及びフィールド予測モード符号化部170cは、並行して処理を行う。
【0028】
まず、Intra符号化部170aは、Intraモードによる符号化を行う。具体的には、Intra符号化部170aは、マクロブロック毎に分割された入力フレームを符号化し、その符号化量を符号化モード判定部110に対して出力する。なお、実施例1において、Intra符号化部170aは、横16×縦16画素のマクロブロック毎に入力フレームを符号化する。
【0029】
また、フレーム予測モード符号化部170bは、フレーム予測モードによる符号化を行う。具体的には、フレーム予測モード符号化部170bは、動きベクトル検出部160から受け付けたフレーム予測モード用の動きベクトルと、フレームメモリ150に格納された参照フレームとを用いて、予測フレームを生成し、生成した予測フレームを減算器180に対して出力する。また、フレーム予測モード符号化部170bは、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化し、その符号化量と、フレーム予測モード用の動きベクトルとを、符号化モード判定部110に対して出力する。
【0030】
また、フィールド予測モード符号化部170cは、フィールド予測モードによる符号化を行う。具体的には、フィールド予測モード符号化部170cは、動きベクトル検出部160から受け付けたフィールド予測モード用の動きベクトルと、フレームメモリ150に格納された参照フレームとを用いて、予測フレームを生成し、生成した予測フレームを減算器180に対して出力する。また、フィールド予測モード符号化部170cは、入力フレームと予測フレームとを減算し、減算結果である差分画像データを符号化し、その符号化量と、フィールド予測モード用の動きベクトルとを、符号化モード判定部110に対して出力する。
【0031】
一方、符号化モード判定部110は、予測モードを選択するための閾値を予め設定されることで記憶している。そして、符号化モード判定部110は、Intra符号化部170aから出力された符号化量と、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量とを比較する。
【0032】
具体的には、符号化モード判定部110は、Intra符号化部170aから出力された符号化量が最も小さい場合には、Intraモードを選択する。一方、Intra符号化部170aから出力された符号化量が最も大きい場合には、符号化モード判定部110は、次に、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との比較を行う。なお、Intra符号化部170aから出力された符号化量は、最小か最大かのいずれかになり、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との間にはならないと仮定する。
【0033】
そして、符号化モード判定部110は、フレーム予測モード符号化部170bから出力された符号化量と、フィールド予測モード符号化部170cから出力された符号化量との比較の結果、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上小さいと判定されたことを条件として、フィールド予測モードを選択する。一方、符号化モード判定部110は、それ以外の場合には、フレーム予測モードを選択する。
【0034】
その後、符号化モード判定部110は、判定結果を、符号化に必要なデータとともに、符号化部120に送る。具体的には、符号化モード判定部110は、「Intraモードを選択した」との判定結果を送る場合には、符号化に必要なデータとして入力フレームを送る。また、符号化モード判定部110は、「フレーム予測モードを選択した」との判定結果を送る場合には、符号化に必要なデータとして、フレーム予測モード用の動きベクトルと、フレーム予測モードに対応する差分画像データとを送る。また、符号化モード判定部110は、「フィールド予測モードを選択した」との判定結果を送る場合には、符号化に必要なデータとして、フィールド予測モード用の動きベクトルと、フィールド予測モードに対応する差分画像データとを送る。一方、符号化部120は、符号化モード判定部110から送られた判定結果やデータを用いて符号化を行うが、この際、選択された予測モードを示す情報を、符号化データのヘッダ情報に格納する。
【0035】
なお、Intra符号化部170aから出力された符号化量は、横16×縦16画素のマクロブロックに対応する符号化量である。また、フレーム予測モード符号化部170bから出力された符号化量も、横16×縦16画素のマクロブロックに対応する符号化量である。これに対し、フィールド予測モード符号化部170cから出力された符号化量は、横16×縦8画素のマクロブロックに対応する符号化量である。このため、符号化モード判定部110は、比較にあたり、例えば、フィールド予測モード符号化部170cから出力された符号化量については、2マクロブロック分、すなわち、横16×縦16画素のマクロブロックに対応する符号化量を、その比較対象として用いてもよい。比較対象として1マクロブロック分を用いるか、あるいは2マクロブロック分を用いるかは、閾値をどのような値に設定するかによって任意に選択することができる。
【0036】
また、実施例1に係る符号化装置100として各部の処理を説明したが、開示の技術は上記例に限られるものではない。例えば、実施例1においては、動き補償部170が、各種符号化モードによる符号化を行い、符号化量を算出して符号化モード判定部110に出力するものとして説明したが、これに限られるものではなく、例えば、符号化モード判定部110が符号化量を算出し、算出した符号化量を用いて予測モードを選択する構成であってもよい。このように、各部の機能分担は任意に変更することができる。
【0037】
次に、図3は、実施例1に係る符号化処理手順を示すフローチャートである。なお、図3においては、主に実施例1に係る符号化装置100に特有の符号化処理手順を示す。具体的には、まず、動き補償部170は、Intra符号化部170aによる符号化処理、フレーム予測モード符号化部170bによる符号化処理、及びフィールド予測モード符号化部170cによる符号化処理を並行して行う(ステップS101)。
【0038】
次に、符号化モード判定部110は、3つの符号化量それぞれを比較し(ステップS102)、比較の結果、フィールド予測モード符号化部170cから出力された符号化量が、予め記憶している閾値以上に、フレーム予測モード符号化部170bから出力された符号化量より小さいか否かを判定する(ステップS103)。そして、符号化量の差が閾値より小さい、すなわち、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上に小さい場合ではないと判定した場合には(ステップS103肯定)、符号化モード判定部110は、予測モードとしてフレーム予測モードを選択する(ステップS104)。
【0039】
一方、符号化量の差が閾値より大きい、すなわち、フィールド予測モード符号化部170cから出力された符号化量が、フレーム予測モード符号化部170bから出力された符号化量に比較して、予め記憶している閾値以上小さい場合であると判定した場合には(ステップS103否定)、符号化モード判定部110は、予測モードとしてフィールド予測モードを選択する(ステップS105)。
【0040】
ところで、実施例1において、符号化量の比較に用いられる閾値は、符号化データの発生量や予測の誤差量等に基づいて予め決定されたものであり、言い換えると、計算量や圧縮率、あるいは精度等を総合的に勘案して予め決定されたものである。符号化データの発生量が少ない方が、符号化処理の計算量が少なく、より高い圧縮率となると考えられるが、予測の誤差量が多く、精度が低い場合には、必ずしも符号化データの発生量だけに着目するべきではない。また、精度が低い場合には、符号化データの発生量がかえって多くなることもある。
【0041】
ここで、フレーム予測モードによって符号化された場合の符号化量と、フィールド予測モードによって符号化された場合の符号化量とを比較すると、一般的には前者の方が小さくなるが、後者の方が小さくなることもある。この点、実施例1に係る輪郭抽出システム10は、単に後者の方が小さくなる場合にフィールド予測モードを選択するのではなく、符号化量を比較するための閾値を設け、この閾値以上に後者の符号化量が小さくなった場合に、フィールド予測モードを選択する。
【0042】
すなわち、対象物の動きが速い場合には、フィールド予測モードの方が精度が良くなるという関係がある。また、フィールド予測モードの方が精度が良い場合には、フレーム予測モードによって符号化された場合の符号化量と、フィールド予測モードによって符号化された場合の符号化量とを比較した場合に、後者の符号化量の方が小さくなるという関係がある。もっとも、符号化量を単純に比較しただけでは、フィールド予測モードの精度がそれほど良くなっているわけではないにもかかわらず、フィールド予測モードを選択してしまう可能性がある。このような場合は、必ずしも対象物の輪郭に相当しないことがあり、結果として、復号化装置200において、対象物の輪郭に相当しないマクロブロックの画像上の位置を、対象物の輪郭に相当する領域として特定してしまうおそれがある。
【0043】
この点、実施例1に係る符号化装置100は、符号化量の比較のためにあえて閾値を設け、閾値を上回るほどにフィールド予測モードの符号化量が小さい場合にだけ、フィールド予測モードを選択する。すると、結果として、復号化装置200において、閾値を上回るほどにフィールド予測モードの符号化量が小さい場合にだけ、そのマクロブロックの画像上の位置が、対象物の輪郭に相当する領域として特定されることになる。
【0044】
なお、閾値は、例えば、実験結果や経験則等に基づいて決定することができる。例えば、動きのある対象物をサンプルとして各種符号化モードによる符号化量を計測し、対象物の輪郭に相当するマクロブロックの場合には、その符号化量にどれほどの差が生じるかを予め求めることで、閾値を決定することができる。
【0045】
[実施例1に係る復号化装置200の構成]
次に、図4及び図5を用いて、実施例1に係る復号化装置200の構成を説明する。図4は、実施例1に係る復号化装置200の構成を示すブロック図である。図4に例示するように、実施例1に係る復号化装置200は、特に、輪郭抽出部210と、可変長復号−逆スキャン部220と、逆量子化−逆DCT部230と、動き補償部240と、フレームメモリ250と、復号化画像表示部260とを備える。なお、実施例1に係る復号化装置200は、図4に例示するように外部の出力部280に接続し、復号化画像や輪郭抽出部210において生成された輪郭画像を表示する構成を採る。選択部270は、出力部280に表示する画像の選択を受け付け、受け付けた選択に従って出力部280に画像を表示する。例えば、選択部270は、復号化画像及び輪郭画像の双方を重畳表示したり、いずれか一方の画像のみを表示する。
【0046】
ここで、実施例1に係る復号化装置200は、公知の復号化装置と同様の機能を有する。この点について簡単に説明すると、まず、復号化装置200は、符号化データの入力を受け付けると、可変長復号−逆スキャン部220及び逆量子化−逆DCT部230が符号化データを復号化し、例えば動きベクトル及び差分画像データを取得する。次に、動き補償部240が、復号化された動きベクトルとフレームメモリ250に格納されている参照フレームとを用いて予測フレームを生成し、生成した予測フレームと復号化された差分画像データとを用いて入力フレームを復号化し、得られた復号化画像をフレームメモリ250に格納する。そして、復号化画像表示部260が、フレームメモリ250に格納された復号化画像を、出力部280に表示する。
【0047】
さて、ここで、実施例1に係る復号化装置200は、上述した公知の復号化装置が有する機能に加え、輪郭抽出部210を備え、この輪郭抽出部210が、輪郭抽出処理を行う。この点について説明する。輪郭抽出部210は、図4に例示するように、ヘッダ情報読出部211と、輪郭領域特定部212と、輪郭画像生成部213と、輪郭画像表示部214とを有する。
【0048】
ヘッダ情報読出部211は、符号化データに含まれるヘッダ情報からピクチャ構造情報及び予測モード情報を読み出す。具体的には、まず、ヘッダ情報読出部211は、例えば可変長復号−逆スキャン部220から、可変長復号−逆スキャン部220において復号化されたヘッダ情報を取得する。次に、ヘッダ情報読出部211は、ヘッダ情報のピクチャ層を解析し、ピクチャの構造を示すピクチャ構造情報を読み出す。また、ヘッダ情報読出部211は、ヘッダ情報のマクロブロック層を解析し、マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す。そして、ヘッダ情報読出部211は、読み出したピクチャ構造情報及び予測モード情報を輪郭領域特定部212に送る。
【0049】
輪郭領域特定部212は、ヘッダ情報読出部211によって読み出されたピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、対象物の輪郭に相当する領域を特定する。具体的には、輪郭領域特定部212は、ヘッダ情報読出部211からピクチャ構造情報及び予測モード情報を受け付けると、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。そして、輪郭領域特定部212は、特定した領域の位置情報(例えば座標情報等)を輪郭画像生成部213に送る。
【0050】
図5は、輪郭に相当する領域の特定を説明するための図である。なお、図5は、領域特定の概念を例示するものである。図5に例示する『人』は、動きのある対象物を意味する。また、図5に例示する黒色の四角形は、対象物の輪郭に相当する領域として特定された位置に存在するマクロブロックを意味する。輪郭領域特定部212は、図5に例示するように、『人』の輪郭線上に存在するマクロブロックの位置を、対象物の輪郭に相当する領域として特定する。
【0051】
ここで、実施例1に係る輪郭領域特定部212が、動きのある対象物の輪郭に相当する領域を特定することができる理由を説明する。上述したように、実施例1に係る符号化装置100は、符号化量の比較の結果に基づいて予測モードを動的に選択し、フレーム予測モードが選択されたか、あるいは、フィールド予測モードが選択されたかを示す情報を、符号化データのヘッダ情報に格納する。すると、実施例1に係る輪郭領域特定部212は、ヘッダ情報に格納されたこの情報を解析することで、そのマクロブロックが、「閾値を上回るほどに符号化量が小さい」と判定されて符号化されたものであるのか、あるいは、そうではないと判定されて符号化されたものであるのかを特定することができる。
【0052】
ここで、動きのある対象物の輪郭は、符号化量の比較において「閾値を上回るほどに符号化量が小さい」と判定される傾向がある。一方、例えば背景や対象物の輪郭以外の部分などは、「閾値を上回るほどには符号化量が小さくならない」と判定される傾向がある。このようなことから、輪郭領域特定部212は、「閾値を上回るほどに符号化量が小さい」と判定されて符号化されたマクロブロックの画像上の位置を、動きのある対象物の輪郭に相当する領域として特定することができるのである。
【0053】
輪郭画像生成部213は、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した画像データ(輪郭画像とも称する)を生成する。具体的には、輪郭画像生成部213は、輪郭領域特定部212から対象物の輪郭に相当する領域の位置情報を受け付けると、受け付けた位置情報を用いて輪郭画像を生成し、生成した輪郭画像をフレームメモリ250に格納する。
【0054】
図6は、実施例1に係る輪郭画像の一例を示す図である。図6に例示するように、輪郭画像生成部213は、輪郭領域特定部212から受け付けた位置情報に基づいて、画素同士を線で結び、一部補完するなどして輪郭画像を生成する。ここで、輪郭のみが現わされた輪郭画像からは、個人を特定する情報等が大幅に削除されると考えられるので、プライバシー等の観点から有効な画像を生成することになる。なお、輪郭画像は図6の例に限られず、例えば、輪郭を囲む最小長方形等を算出し、輪郭画像として表示してもよい。
【0055】
輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像を出力部に表示する。具体的には、輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像をフレームメモリ250から取得し、取得した輪郭画像を出力部280に表示する。なお、実施例1においては、輪郭が可視化された輪郭画像のみを表示する手法を説明したが、開示の技術はこれに限られるものではなく、例えば、復号化画像と輪郭画像とを重畳させて表示してもよい。
【0056】
図7は、実施例1に係る輪郭抽出処理手順を示すフローチャートである。なお、図7においては、主に実施例1に係る復号化装置200に特有の輪郭抽出処理手順を示す。具体的には、まず、ヘッダ情報読出部211が、可変長復号−逆スキャン部220からヘッダ情報を取得するまで待機し(ステップS201)、ヘッダ情報を取得すると(ステップS201肯定)、ヘッダ情報を解析し、ピクチャ構造情報及び予測モード情報を読み出す(ステップS202)。
【0057】
次に、輪郭領域特定部212が、ヘッダ情報読出部211によって読み出されたピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合であるか否かを判定する(ステップS203)。
【0058】
そして、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合であると判定すると(ステップS203肯定)、輪郭領域特定部212は、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する(ステップS204)。一方、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合でないと判定すると(ステップS203否定)、輪郭領域特定部212は、輪郭に相当する領域の特定を行うことなく処理を終了する。
【0059】
なお、開示の技術は、上述した構成や処理手順に限られるものではない。例えば、符号化装置100が予測モードを動的に選択する手法として、「フレーム予測モード用」の動きベクトルが示す動き速度と閾値とを比較する手法を例示したが、この手法に限られるものではなく、動き速度と閾値との比較結果に従って予測モードを動的に選択する手法であれば、他の手法でもよい。また、例えば、復号化装置200の輪郭抽出部210が、可変長復号−逆スキャン部220からヘッダ情報を取得する手法を例示したが、この手法に限られるものではなく、例えば逆量子化−逆DCT部230から取得する等、他の部やタイミングで取得する手法であってもよい。
【0060】
[実施例1の効果]
上述したように、実施例1に係る輪郭抽出システム10は、符号化装置100及び復号化装置200を備える。符号化装置100において、動きベクトル検出部160が、対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する。また、動き補償部170が、動きベクトル検出部160によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いてマクロブロックを符号化する。また、動き補償部170が、動きベクトル検出部160によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いてマクロブロックを符号化する。そして、符号化モード判定部110が、フィールド予測モードによって符号化した場合の第1符号化量が、フレーム予測モードによって符号化した場合の第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する。また、符号化部120が、選択された予測モードに従って画像データを符号化する。一方、復号化装置200において、ヘッダ情報読出部211が、符号化データに含まれるヘッダ情報から、ピクチャ構造情報及び予測モード情報を読み出す。また、輪郭領域特定部212が、ピクチャ構造情報及び予測モード情報をマクロブロック毎に判定し、ピクチャ構造情報がフレーム構造を示し、かつ、予測モード情報がフィールド予測モードを示す場合に、対応するマクロブロックの画像上の位置を対象物の輪郭に相当する領域として特定する。このようなことから、実施例1に係る輪郭抽出システム10によれば、対象物の輪郭に相当する領域を特定することが可能になり、動きのある対象物を適切に抽出することが可能になる。
【0061】
例えば、動きベクトルが検出された画像領域を移動領域とみなす従来の技術では、対象物とノイズ(蛍光灯のちらつきや木の葉の揺れ等)との区別が課題となっていた。この点、実施例1に係る輪郭抽出システム10によれば、このようなノイズは、フレーム予測モードで符号化されるので、対象物の輪郭に相当する領域との区別が可能になる。
【0062】
また、実施例1に係る復号化装置200は、輪郭画像生成部213及び輪郭画像表示部214をさらに備える。輪郭画像生成部213は、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した輪郭画像を生成する。また、輪郭画像表示部214は、輪郭画像生成部213によって生成された輪郭画像を出力部に出力する。このようなことから、実施例1に係る復号化装置200によれば、輪郭のみが現わされた画像を出力することが可能になり、プライバシー等の観点からも有効な画像データを提供することが可能になる。なお、輪郭画像生成部213及び輪郭画像表示部214は必ずしも必須の構成ではない。
【実施例2】
【0063】
次に、実施例2に係る輪郭抽出システム20を説明する。実施例2に係る輪郭抽出システム20は、実施例1に係る輪郭抽出システム10と同様、符号化装置100及び復号化装置200を備えるが、復号化装置200において、輪郭抽出処理を補完する機能が更に追加された点で、実施例1に係る輪郭抽出システム10と異なる。
【0064】
図8は、実施例2に係る復号化装置200の構成を示すブロック図である。図8に例示するように、実施例2に係る復号化装置200は、輪郭抽出部210に、輪郭抽出補完部215をさらに備える。輪郭抽出補完部215は、フレームメモリ250に格納された復号化画像を用いて輪郭抽出を行う。具体的には、輪郭抽出補完部215は、フレームメモリ250に格納された復号化画像に対して、1フレーム内の全領域(又は特定の領域)を走査し、例えばマクロブロック単位で動きベクトルを算出する。次に、輪郭抽出補完部215は、算出した結果から、動きベクトルが存在するマクロブロックと、動きベクトルが存在しないマクロブロック(≒0)とを特定し、動きベクトルが存在するマクロブロックや、その境界に位置づけられるマクロブロックの画像上の位置を、輪郭に相当する領域として特定する。そして、輪郭抽出補完部215は、輪郭情報(マクロブロックの画像上の位置を示す位置情報等)を輪郭画像生成部213に送る。
【0065】
実施例2に係る輪郭画像生成部213は、輪郭領域特定部212による特定結果のみならず、輪郭抽出補完部215から受け付けた輪郭情報を補完的に用いて、輪郭画像を生成する。例えば対象物が複雑な形状である場合や、対象物の動きが複雑な動きであった場合等には、輪郭領域特定部212による処理も、あるいは、輪郭抽出補完部215による処理も、必ずしも最適な結果とならない可能性がある。この点、実施例2に係る輪郭抽出システム20によれば、輪郭領域特定部212及び輪郭抽出補完部215それぞれが、異なる手法により相補的に二重の処理を行うことになるので、対象物の輪郭に相当する領域を一段と精度よく特定することが可能になる。
【0066】
例えば、輪郭画像生成部213は、輪郭領域特定部212から受け付けた位置情報がある領域において少なく、所定の閾値を下回る場合には、その領域については画素間を線で結ぶ処理に適さないとして、輪郭抽出補完部215から受け付けた輪郭情報を補完的に用いる。
【実施例3】
【0067】
次に、実施例3に係る輪郭抽出システム30を説明する。実施例3に係る輪郭抽出システム30は、実施例1に係る輪郭抽出システム10と同様、符号化装置100を有するが、復号化装置200と異なる処理を行う復号化装置300を有する。かかる復号化装置300は、輪郭抽出処理が行われた対象物に対してプライバシー保護処理を施す点で、実施例1に係る復号化装置200と異なる。以下に、このような実施例3に係る復号化装置300について詳細に説明する。
【0068】
図9は、実施例3に係る復号化装置300の構成を示すブロック図である。図9に例示するように、実施例3に係る復号化装置300は、輪郭抽出部310と、選択部370とを有する。輪郭抽出部310は、輪郭画像生成部313を有する。かかる輪郭画像生成部313は、実施例1と同様に、輪郭領域特定部212による特定結果を用いて、対象物の輪郭が現わされ輪郭以外を捨象した画像データ(輪郭画像)を生成する。さらに、実施例3における輪郭画像生成部313は、図9に例示するように、対象物判定部313aと、加工部313bとを有する。
【0069】
対象物判定部313aは、輪郭画像生成部313によって生成された輪郭画像を用いて、対象物が所定の物体であるか否かを判定する。具体的には、対象物判定部313aは、輪郭画像に現されている輪郭に基づいて、かかる輪郭領域によって示される対象物が人、動物又は乗物等であるか否かを判定する。
【0070】
例えば、対象物判定部313aは、人、動物又は乗物等を示す形状のテンプレート(以下、「形状テンプレート」と表記する場合がある)を予め保持する。そして、対象物判定部313aは、対象物の輪郭と形状テンプレートとをパターンマッチング法などにより比較することにより、対象物が人、動物又は乗物等であるか否かを判定する。このとき、対象物判定部313aは、対象物の輪郭自体と形状テンプレートとを比較してもよいし、輪郭に囲まれた領域(以下、「輪郭領域」と表記する場合がある)の内部に、かかる輪郭領域を線によって表す中央線を描き、かかる中央線と形状テンプレートとを比較してもよい。
【0071】
ここで、図10を用いて、対象物判定部313aによる対象物判定処理について説明する。図10は、実施例3における対象物判定部313aによる対象物判定処理の一例を示す図である。なお、図10では、対象物判定部313aが、輪郭領域内部の中央線と形状テンプレートとを比較する例について説明する。
【0072】
図10に示した例のように、対象物判定部313aは、対象物の輪郭上の任意の点(例えば、図10中の点P)を、かかる点から輪郭領域R11内部への法線方向に所定の長さだけ移動させる。対象物判定部313aは、輪郭上の複数の点について同様の処理を行うことで、図10に例示した輪郭よりも全体的に小さい輪郭を形成する。そして、対象物判定部313aは、輪郭上の複数の点について輪郭領域R11内部へ移動させる処理を繰り返し行うことで、図10に例示したように、輪郭領域R11に中央線L11を描く。対象物判定部313aは、かかる中央線L11と形状テンプレートとを比較し、輪郭領域R11によって示される対象物が人、動物又は乗物等であるか否かを判定する。図10に示した例では、対象物判定部313aは、輪郭領域R11によって示される対象物が人であると判定する。
【0073】
なお、対象物判定部313aは、輪郭(輪郭領域内部の中央線を含む)と形状テンプレートとの比較にあたり、例えば、折れ曲がっている部分(関節に相当)の数や、枝分かれしている部分の数や、各領域の長さの比率等を比較する。例えば、対象物が人である場合には、かかる対象物は、概ねヒトデのような形状となる。したがって、対象物判定部313aは、輪郭の折れ曲がっている部分の数や枝分かれしている部分の数がヒトデと類似する場合には、対象物が人であると判定する。
【0074】
図9の説明に戻って、加工部313bは、対象物判定部313aによる判定結果に基づいて、対象物の輪郭領域に、かかる対象物を示す画像データ以外の他の画像データを配置することで、輪郭画像を加工する。例えば、加工部313bは、対象物判定部313aによって輪郭領域によって示される対象物が人であると判定された場合には、輪郭領域に一般的な人を表す画像データを配置する。また、例えば、加工部313bは、対象物判定部313aによって輪郭領域によって示される対象物が動物や乗物等であると判定された場合には、輪郭領域に一般的な動物や乗物等を示す画像データを配置する。ここで、加工部313bは、人、動物又は乗物等であることを想起することができる代替用画像を予め保持し、これらの代替用画像を輪郭領域に配置することで、輪郭画像を加工する。この代替用画像は、例えば、所定の図形の組合せや、人、動物又は乗物等を示すアニメーション画像などである。
【0075】
図11は、実施例3における加工部313bによって加工された輪郭画像の一例を示す図である。なお、図11に示した輪郭画像G12は、加工部313bによって図10に例示した輪郭画像G11が加工されたものとする。上記の通り、対象物判定部313aは、図10に例示した輪郭によって示される対象物を人であると判定する。したがって、加工部313bは、図11に例示するように、輪郭領域R11に人であることを想起することができる代替用画像を配置する。加工部313bは、このようにして輪郭画像G11を加工することで図11に例示した輪郭画像G12を生成する。なお、図11に示した例では、加工部313bは、輪郭領域R11を折れ曲がっている部分で分断し、分断後の領域毎に、かかる領域の大きさに対応する図形(円形や楕円形や長方形等)を配置している。具体的には、加工部313bは、円形や楕円形や長方形等の各図形を保持しており、分断後の領域と保持している各図形とをパターンマッチング法などにより比較し、マッチする図形を分断後の領域に配置する。
【0076】
図9の説明に戻って、選択部370は、輪郭画像表示部214から加工部313bにより加工された輪郭画像を受け付けるとともに、復号化画像表示部260から復号化画像を受け付け、受け付けた輪郭画像又は復号化画像のいずれか一方の画像を出力部280に表示したり、双方の画像を重畳した重畳画像を出力部280に表示したりする。
【0077】
例えば、実施例3に係る復号化装置300が各管理者等からログインされるシステムであるものとする。かかる場合に、選択部370は、例えば、全ての画像を閲覧することが許可されている管理者等によってログインされている場合には、復号化画像表示部260から受け付けた復号化画像を出力部280に表示する。また、例えば、選択部370は、画像に写っている人、動物(ペット)又は乗物のナンバー等を閲覧することが許可されていない管理者等によってログインされている場合には、輪郭画像と復号化画像とを重畳した重畳画像を出力部280に表示する。
【0078】
ここで、図12を用いて、選択部370による重畳画像の生成処理について説明する。図12は、実施例3における選択部370による重畳画像生成処理の一例を示す図である。図12に示した例において、選択部370は、復号化画像表示部260から復号化画像G10を受け付けるとともに、輪郭画像表示部214から輪郭画像G12を受け付ける。このとき、選択部370は、復号化画像G10から輪郭領域を取り除くことにより、背景画像G13を生成する。例えば、選択部370は、復号化画像G10における輪郭領域内の全画素を所定の画素(例えば、『白』を示す画素値「1」等)にすることで、背景画像G13を生成する。そして、選択部370は、図12に例示するように、背景画像G13に輪郭画像G12を重畳することで、重畳画像G14を生成する。選択部370は、このようにして生成した重畳画像G14を出力部280に表示する。
【0079】
これにより、選択部370は、人等のプライバシーが保護された重畳画像を表示することができる。さらに、加工部313bが、人、動物又は乗物等であることを想起することができる代替用画像を用いて輪郭画像を加工するので、選択部370は、加工部313bによって加工された輪郭画像から生成した重畳画像を表示する場合であっても、復号化画像に描出されていた対象物と異なる対象物を想起させるような画像を表示することはない。すなわち、実施例3に係る復号化装置300は、復号化画像に描出されていた対象物と同一の人、動物又は乗物等であることを想起させることができるとともに、かかる対象物のプライバシーを保護することができる。
【0080】
なお、上記の輪郭画像生成部313によって特定される輪郭領域と、加工部313bによって用いられる代替用画像が占める領域とは、必ずしも一致するとは限らない。すなわち、図12に示した例において、選択部370によって復号化画像G10から取り除かれる輪郭領域(背景画像G13を参照)は、加工部313bによって用いられる代替用画像の領域(輪郭画像G12を参照)と一致するとは限らない。このため、対象物を示す輪郭領域が代替用画像の領域よりも大きい場合には、重畳画像G14の一部分は、所定の画素(例えば、『白』を示す画素値「1」等)となり、対象物も背景も描出されない可能性がある。
【0081】
そこで、実施例3における加工部313bは、輪郭領域よりも代替用画像の占める領域が大きくなるように代替用画像を拡大してもよい。具体的には、加工部313bは、輪郭領域と代替用画像とを比較し、代替用画像が対象物の輪郭の全てを覆うことができるように代替用画像を拡大する。これにより、加工部313bは、重畳画像G14の一部分に対象物及び背景が描出されなくなることを防止できる。
【0082】
また、重畳画像の一部分に対象物及び背景が描出されないことを防止するために、選択部370が、重畳画像を生成する際に、複数の復号化画像から背景画像を補完してもよい。この点について、図13を用いて具体的に説明する。図13は、実施例3における選択部370による重畳画像生成処理の一例を示す図である。図13に示した例において、時間t=1は、時間t=2よりも過去であるものとする。
【0083】
選択部370は、時間t=2において受け付けた復号化画像G20から背景画像を生成する場合に、過去の復号化画像G10も用いる。具体的には、選択部370は、時間t=2に対応する復号化画像G20から対象物の輪郭領域を取り除くことにより背景画像G23を生成し、時間t=2よりも過去である時間t=1に受け付けた復号化画像G10から対象物の輪郭領域を取り除くことにより背景画像G13を生成する。そして、選択部370は、背景画像G23のうち、輪郭領域(例えば、画素値を「1」とした領域)に背景画像G13の画素を配置することにより、背景画像G30を生成する。具体的には、選択部370は、背景画像G23の輪郭領域に、かかる輪郭領域に対応する位置における背景画像G13の画素を配置する。このように、選択部370は、対象物が移動することを利用して、時相の異なる複数の復号化画像から、画素値「1」等に置き換えられた領域を含まない背景画像を生成する。選択部370は、このような背景画像G30に、加工部313bによって加工された輪郭画像を重畳させることにより、重畳画像の一部分に対象物及び背景が描出されなくなることを防止できる。
【0084】
次に、図14を用いて、実施例3に係る復号化装置300による処理の手順について説明する。図14は、実施例3に係る画像生成処理手順を示すフローチャートである。なお、図14においては、輪郭領域特定部212によって輪郭に相当する領域が特定されているものとする。
【0085】
輪郭画像生成部313は、輪郭領域特定部212によって対象物の輪郭に相当する領域が特定された場合に、かかる輪郭の領域に基づいて対象物の輪郭画像を生成する(ステップS301)。続いて、対象物判定部313aは、輪郭画像生成部313によって生成された輪郭画像に基づいて、対象物が人、動物又は乗物等であるか否かを判定する(ステップS302)。
【0086】
続いて、加工部313bは、対象物判定部313aによって対象物が人等であると判定された場合に(ステップS302肯定)、代替用画像を用いて、対象物判定部313aによって生成された輪郭画像を加工する(ステップS303)。このとき、加工部313bは、対象物判定部313aによって判定された対象物の種類(人、動物又は乗り物等)に対応する代替用画像を用いる。
【0087】
続いて、選択部370は、復号化画像表示部260によって生成された復号化画像から対象物の輪郭領域を取り除くことにより、背景画像を生成する(ステップS304)。そして、選択部370は、背景画像に対して、加工部313bによって加工された輪郭画像を重畳することで、重畳画像を生成する(ステップS305)。
【0088】
上述してきたように、実施例3に係る復号化装置300は、対象物判定部313aが、輪郭画像生成部313によって生成された輪郭画像を用いて、対象物が所定の物体であるか否かを判定し、加工部313bが、対象物判定部313aによる判定結果に基づいて、対象物の輪郭領域に、かかる対象物を示す画像データ以外の他の画像データを配置することで輪郭画像を加工する。これにより、実施例3に係る復号化装置300は、動きのある対象物のプライバシーを保護することができる。
【0089】
なお、上記実施例3では、加工部313bが、図11に例示したような代替用画像を用いて輪郭画像を加工する例を示した。しかし、加工部313bによる加工処理は、代替用画像を用いた例に限られない。以下に、加工部313bによる加工処理についていくつか例を挙げて説明する。
【0090】
例えば、加工部313bは、対象物の輪郭領域に所定の画素(例えば、『黒』を示す画素値「0」等)を配置することで、特定の人、動物又は乗物等を特定されないようにしてもよい。このとき、加工部313bは、対象物の種類に応じて輪郭領域に配置する画素値を変更してもよい。例えば、加工部313bは、対象物が人である場合には、輪郭領域に『黒』を示す画素値を配置し、対象物が動物である場合には、輪郭領域に『青』を示す画素を配置してもよい。
【0091】
また、加工部313bは、対象物の輪郭領域について二値化処理を施してもよい。具体的には、加工部313bは、輪郭領域に含まれる各画素値について、所定の閾値以上であるか否かを判定する。そして、加工部313bは、画素値が所定の閾値以上である領域については画素値を「1」とし、画素値が所定の閾値よりも小さい領域については画素値を「0」とする。これにより、加工部313bは、対象物を2種類の画素値によって現すことが可能になり、この結果、対象物が何であるかを想起しやすくすることができる。
【0092】
また、加工部313bは、対象物の輪郭領域に含まれる画素の配置を変更することで、特定の人、動物又は乗物等を特定されないようにしてもよい。具体的には、加工部313bは、輪郭領域を所定のマクロブロック(例えば、横16×縦16画素)毎に分割し、マクロブロック内で画素の位置を変更してもよい。例えば、加工部313bは、輪郭領域をマクロブロックM1〜M10に分割した場合に、マクロブロックM1に含まれる各画素の配置をマクロブロックM1内で変更する。加工部313bは、同様の処理をマクロブロックM2〜M10についても行う。なお、加工部313bによる画素の配置変更処理は、任意の手法を適用することができる。例えば、加工部313bは、横方向に隣接する2個の画素の位置を変更してもよいし、縦方向に隣接する2個の画素の位置を変更してもよい。また、例えば、加工部313bは、画素の配置を変更するのではなく、マクロブロック(マクロブロックM1等)内の全画素値の平均値を算出し、算出した画素値をマクロブロックに配置してもよい。
【0093】
また、加工部313bは、対象物の輪郭領域に含まれる画素値を変更することで、特定の人、動物又は乗物等を特定されないようにしてもよい。すなわち、加工部313bは、輪郭領域に含まれる画素値を変更することで、対象物の色合いを変更する。例えば、加工部313bは、対象領域が人である場合に、対象領域のうち顔を示す領域、胴体を示す領域、手足を示す領域を特定する。そして、加工部313bは、顔を示す領域については、全てを同一画素値に置き換え、胴体を示す領域や手足を示す領域については、かかる領域の画素値に所定の画素値を加算又は減算する。これにより、加工部313bは、対象物の顔が特定されず、かつ、対象物の服や皮膚の色を変更することができる。この結果、加工部313bは、対象物が所定の人物であると特定されることを防止できるので、対象物のプライバシーを保護することができる。
【0094】
また、例えば、加工部313bは、顔を示す領域については、上記例のように画素の配置を変更してもよい。これにより、加工部313bは、対象物の顔をやや異なる顔に変更することができ、対象物が所定の人物であると特定されることを防止できる。また、例えば、加工部313bは、顔を示す領域のうち、眉毛、目、鼻、口等を示す領域を特定し、特定した眉毛、目、鼻、口等の位置や変更してもよい。例えば、加工部313bは、眉毛を頭頂部方向に移動させることで額を狭くしたり、目や鼻や口の大きさを変更したりする。これにより、加工部313bは、対象物が所定の人物であると特定されることを防止できる。
【実施例4】
【0095】
次に、実施例4に係る輪郭抽出システム40を説明する。実施例4に係る輪郭抽出システム40は、監視システムに適用され、実施例3に係る輪郭抽出システム30と同様、符号化装置100を有するが、復号化装置300と異なる処理を行う復号化装置400を有する。かかる復号化装置400は、輪郭抽出処理が行われた対象物の移動量に基づいて、監視者等に警告を通知する点で、実施例3に係る復号化装置300と異なる。以下に、このような実施例4に係る復号化装置400について詳細に説明する。
【0096】
図15は、実施例4に係る復号化装置400の構成を示すブロック図である。図15に例示するように、実施例4に係る復号化装置400は、警告部490をさらに有する。警告部490は、輪郭画像生成部313によって生成された輪郭画像を取得し、かかる輪郭画像に現されている輪郭の移動量を監視する。そして、警告部490は、輪郭の移動量が所定の閾値以上である場合や、輪郭の移動量が所定の閾値以下である場合に、監視者等に警告を通知する。
【0097】
このような警告部490が警告を通知する条件は、実施例4に係る輪郭抽出システム40が適用されるシステムによって異なる。以下に、輪郭抽出システム40が適用されるいくつかのシステムと、警告部490による処理の一例について説明する。
【0098】
まず、実施例4に係る輪郭抽出システム40が、老人や患者等を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、例えば、老人が居住する部屋や、患者が入院している病室等に設置され、老人や患者等を撮影する。そして、輪郭抽出システム40の符号化装置100は、監視カメラから送信される画像データに対して、実施例1〜3に示した各種処理を行う。また、復号化装置400は、符号化装置100から送信される符号化データを用いて、対象物である老人や患者の輪郭を適切に抽出する。
【0099】
ここで、復号化装置400の警告部490は、輪郭画像生成部313によって輪郭画像が生成されるたびに、かかる輪郭画像を取得する。そして、警告部490は、撮影時刻の異なる画像データから生成された輪郭画像内の輪郭を比較することにより、輪郭間の距離を求める。このとき、警告部490は、所定時間(例えば、1時間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、算出した移動量が所定の閾値以下である場合に、警告を通知する。これは、老人や患者等が数時間も移動せずに停止している場合には、老人や患者等に何かしらの異変が発生したと考えられるからである。
【0100】
なお、警告部490は、上記例において、所定の時間帯についてのみ警告の通知処理を行ってもよい。例えば、就寝中の老人や患者はほとんど移動しないと考えられるので、警告部490は、老人や患者が寝ていると考えられる時間帯については警告の通知処理を行わずに、老人や患者が起床していると考えられる時間帯のみ警告の通知処理を行ってもよい。また、例えば、就寝中の老人や患者が激しく移動した場合には、何かしらの異変が発生したとも考えられる。したがって、警告部490は、老人や患者が寝ていると考えられる時間帯については、老人や患者等の移動量が所定の閾値以上である場合に、警告を通知してもよい。
【0101】
このように、輪郭抽出システム40は、老人や患者等を監視する監視システムに適用されることで、老人や患者等の異変を適切に検出することができる。なお、老人や患者等は、私生活を監視される監視カメラが設置されることに抵抗を感じる可能性がある。しかし、輪郭抽出システム40の復号化装置400は、実施例3において説明したように、対象物を代替用画像等に置き換えるので、老人や患者等のプライバシーを保護することができる。この結果、輪郭抽出システム40は、老人や患者等に抵抗感を与えることなく、上記のような監視システムに適用することができる。
【0102】
続いて、実施例4に係る輪郭抽出システム40が、エレベータや電車やタクシー等の不特定の人に利用される乗物等の内部を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、エレベータ内や電車内やタクシー内等に設置され、エレベータ等の利用者を撮影する。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより輪郭間の距離を求め、所定時間(例えば、1分間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、利用者の移動量が所定の閾値以上である場合に、警告を通知する。これは、一般的に、エレベータや電車やタクシーでは利用者が激しく移動することがなく、利用者が激しく移動した場合には、エレベータ内等で何かしらの異変が発生したと考えられるからである。
【0103】
このように、輪郭抽出システム40は、乗物内部を監視する監視システムに適用されることで、乗物の利用者の異変を適切に検出することができる。また、輪郭抽出システム40は、利用者のプライバシーを保護することができるので、利用者に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0104】
続いて、実施例4に係る輪郭抽出システム40が、落石等を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、崖等を撮影可能な位置に設置される。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより輪郭間の距離を求め、所定時間(例えば、1分間)内における輪郭間の距離の総和を移動量として算出する。そして、警告部490は、算出した移動量が所定の閾値以上である場合に、警告を通知する。これは、一般的に、崖等では激しく移動するものがなく、激しく移動する物体が存在する場合には、落石等があったと考えられるからである。
【0105】
このように、輪郭抽出システム40は、崖等を監視する監視システムに適用されることで、落石等を適切に検出することができる。輪郭抽出システム40は、このような崖を通行する通行人等のプライバシーを保護することができるので、通行人等に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0106】
続いて、実施例4に係る輪郭抽出システム40が、駐車場を監視する監視システムに適用されるものとする。かかる場合に、監視カメラ等は、駐車スペースを撮影可能な位置にされる。ここで、警告部490は、異なる時刻において生成された輪郭画像内の輪郭を比較することにより、車の移動を追従する。これにより、警告部490は、駐車スペースに車が駐車しているか否かを検知することができ、この結果、駐車スペースに車が駐車している割合を通知することができる。例えば、警告部490は、所定の時間毎に、駐車スペースに車が駐車している割合を通知することができる。
【0107】
また、例えば、月極駐車場である場合には、駐車スペースに駐車される車の特徴(大きさ、色等)は予め決められていることが多い。警告部490は、駐車スペース毎に駐車される車の特徴情報を保持しておき、駐車スペースに駐車された車の輪郭や色等と、保持しておいた車の特徴とが異なる場合には、他の車が駐車されたと判定し、警告を通知してもよい。輪郭抽出システム40は、車や乗車している人のプライバシーを保護することができるので、利用者に抵抗感を与えることなく、上記のような監視システムにも適用することができる。
【0108】
上記例のように、実施例4における警告部490は、動きのある対象物に関する情報を解析することで、防犯監視や防災監視として有効に機能することができる。また、例えば、復号化装置400が対象物の基準の動きを予め記憶している場合には、警告部490は、監視により得られた対象物の動きと基準の動きとを比較することにより、基準を逸脱する動きを検出することができ、警告を通知することができる。また、警告部490は、対象物単体として、あるいは単体化した複数の対象物として、基準を逸脱する動きを検出した場合に、異常行動(事件もしくは事故)を検出することもできる。
【0109】
また、例えば、警告部490は、対象物が「静」の状態から「動」の状態へと変化したことを検知することにより、例えば小さな前触れ現象を検知することができる。また、例えば、警告部490は、対象物が「動」の状態から「静」の状態へと変化したことを検知することにより、例えば、交通事故の瞬間や因果関係などを明確にすることができる。
【0110】
以上のように、実施例4に係る復号化装置400は、警告部490が、輪郭の移動量を算出し、算出した移動量が所定の閾値以上であるか、又は、移動量が所定の閾値以下である場合に、警告を通知する。これにより、実施例4に係る復号化装置400は、老人や患者、乗物内の利用者等の異変を適切に検出することができる。
【実施例5】
【0111】
これまで、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの実施例として実施例1〜4を説明してきたが、開示の技術はこれに限られるものではなく、種々の異なる形態にて実施されてよいものである。実施例5では、開示の技術に係る輪郭抽出システム、輪郭抽出装置及び輪郭抽出プログラムの他の実施例について説明する。
【0112】
[移動カメラ]
開示の技術に係る輪郭抽出システムは、画像データが、例えば移動するカメラによって収集された画像データである場合にも、同様に適用することができる。この場合には、背景となる部分からも動きベクトルが検出されることになるので、符号化装置は、背景となる部分から検出される動きベクトルを差し引いた後の「局所的な動きベクトル」のみを用いて上記処理を行う必要がある。
【0113】
例えば、動きベクトル検出部160は、基本となる動きベクトルと同じ動きベクトルであるか、あるいはそれ以外の動きベクトルであるかを判別して動作する。言い換えると、動きベクトル検出部160は、動きベクトルとして同じ値が繰り返されるのか、あるいはそれ以外の値となるのかを判別して動作する。ここで、動きベクトル検出部160は、動きベクトルの予測において、全体の中から予測としてより正しいものがどこにあるかを探索するが、この時、背景となる部分の動きベクトルは、一定のものが繰り返し利用されることになる。このため、動きベクトル検出部160は、繰り返し利用される動きベクトルとは異なる動きベクトルが予測として最も正しいものとして探索された場合に、背景以外の部分から検出された動きベクトルであると判別することができる。
【0114】
[システムの構成]
上記実施例1〜4においては、輪郭抽出システムが、符号化装置及び復号化装置の双方を備える例を説明したが、開示の技術はこれに限られるものではなく、運用の形態に応じてその構成は任意に変更することが可能である。以下、例を挙げて説明する。
【0115】
まず、開示の技術は、予測モードを動的に選択して符号化された符号化データと、この符号化データに含まれるヘッダ情報を解析することにより対象物の輪郭を抽出する構成とがあれば、実現することができる。言い換えると、符号化装置を備えることは必須ではなく、開示の技術は、少なくとも、符号化データの入力を受け付けて輪郭を抽出する輪郭抽出装置があれば、実現することができる。また、少なくとも輪郭を抽出することができればよいので、いわゆる公知の技術による復号化の機能を備えることも必須ではない。すなわち、輪郭抽出処理を行う輪郭抽出装置は、少なくとも、符号化データに含まれるヘッダ情報を解析し、対応するマクロブロックの画像上の位置から輪郭に相当する領域を特定する機能を備えればよい。また、例えば、符号化処理の機能と輪郭抽出処理の機能とが物理的に同一の1つの筐体に備えられていてもよい。
【0116】
さらに、上記実施例1〜4においては、輪郭抽出システムが、輪郭画像を出力部に表示したり、輪郭画像と復号化画像との重畳画像を出力部に出力する手法を例示したが、開示の技術はこれに限られるものではない。例えば、特定した領域に関する情報を輪郭画像として画像化することは必須ではなく、単に記憶部に保持してもよい。必要に応じてこの情報を画像化してもよいし、画像化することなくデータを直接解析することにより何らかの情報を得てもよい。なお、輪郭抽出処理の機能を備える装置に、インターネット等のネットワーク接続用の高速I/Fを付帯することで、抽出した輪郭に関する情報をリアルタイムに伝送することが可能である。
【0117】
[監視システムへの適用]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、実施例4において説明したように、監視システムに適用することが可能である。図16は、開示の技術に係る輪郭抽出システムを監視システムに適用した例を説明するための図である。例えば、図16に例示するように、開示の技術は、監視の現場に符号化装置を設置し、監視の現場とネットワークを介して接続された本部に復号化装置を設置することにより、監視システムに適用することもできる。なお、図16において、説明の便宜上監視の現場は1つであるが、例えば、複数の監視の現場を本部が集中的に管理する構成であってもよい。
【0118】
また、図16には例示していないが、例えば、監視の現場に設置された装置にも輪郭抽出の機能を装備させ、監視の現場と本部とで、輪郭抽出処理の機能分担を行ってもよい。例えば、監視の現場においては、輪郭抽出の結果を短時間の単位で分析し、主に、突然の動きや運動量の大きな動き等の特異な動きを検出し、アラーム情報の通知やアクションを行う。一方、本部においては、輪郭抽出の結果を長時間の単位で分析し、問題となるような動きを蓄積データから抜き出す処理を行う。このように、連携動作を行ってもよい。
【0119】
[機器制御]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、機器制御に適用することが可能である。例えば、装置は、動きのある対象物として機器の外観を監視し、監視により得られた対象物の動きと基準の動きとを比較することにより、基準を逸脱する動きを検出する。例えば、ロボットの動作品質管理等に適用することができる。
【0120】
[身体動き、スポーツ解析]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、スポーツの解析等に適用することが可能である。例えば、装置は、好調時の身体の動きを予め記憶しておき、身体の動きを監視し、監視により得られた身体の動きと好調時の身体の動きとを比較することにより、問題点を定量的に分析する。
【0121】
[好意度や好感度の判定]
また、開示の技術に係る輪郭抽出システム及び輪郭抽出装置は、好意度や好感度の判定等に適用することが可能である。例えば、装置は、群衆やグループ等の集合的な振る舞いを検知、解析し、滞在時間や人々の眼球の動き等を解析することで、例えば、表示中の情報に対する集中度を定量的に分析する。
【0122】
[その他]
また、上記実施例1及び実施例2において検出した対象物の動きをより詳細に解析することも可能である。例えば、対象物の動きを、背景や相対的な手足の長さなどからパターン化し、対象物が人間であるか動物であるかを判定する。また、例えば、対象物の動きを、輪郭の特定に用いられたマクロブロックの動きベクトルが一定値であるか否かに応じて、対象物が、人間であるか電車・車両等であるかを判定する。
【0123】
[画像データの種類]
また、開示の技術が扱う画像データの種類は、上記実施例1及び実施例2において例示したMPEG−2、MPEG−4 AVC/H.264等に限られず、フレーム予測モードとフィールド予測モードとを動的に選択する手法を用いて符号化された画像データであれば、他の種類の画像データであってもよい。
【0124】
[符号化プログラム及び復号化プログラム]
また、上記実施例において説明した符号化方法及び輪郭抽出方法は、符号化プログラムによる情報処理又は輪郭抽出プログラムによる情報処理がコンピュータを用いて具体的に実現されることで実行されてもよい。コンピュータは、例えば、CPU(Central Processing Unit)と、システムメモリと、ハードディスクドライブインタフェースと、ディスクドライブインタフェースと、シリアルポートインタフェースと、ビデオアダプタと、ネットワークインタフェースとを有し、これらの各部はシステムバスによって接続される。システムメモリは、ROM(Read Only Memory)及びRAM(Random Access Memory)を含む。ROMは、例えば、BIOS(Basic Input Output System)等のブートプログラムを記憶する。ハードディスクドライブインタフェースは、ハードディスクドライブに接続される。ディスクドライブインタフェースは、ディスクドライブに接続される。例えば磁気ディスクや光ディスク等の着脱可能な記憶媒体が、ディスクドライブに挿入される。シリアルポートインタフェースは例えば、マウス、キーボードに接続される。ビデオアダプタは、例えば、モニタに接続される。
【0125】
ここで、ハードディスクドライブは、例えば、OS(Operating System)、アプリケーションプログラム、プログラムモジュール、プログラムデータを記憶する。すなわち、開示の技術に係る符号化プログラムは、コンピュータによって実行される指令が記述されたプログラムモジュールとして、例えばハードディスクに記憶される。具体的には、上記実施例で説明した動きベクトル検出部160と同様の処理を実行する手順と、動き補償部170と同様の処理を実行する手順と、符号化モード判定部110と同様の処理を実行する手順と、符号化部120と同様の処理を実行する手順とが記述されたプログラムモジュールが、ハードディスクに記憶される。
【0126】
また、開示の技術に係る輪郭抽出プログラムは、コンピュータによって実行される指令が記述されたプログラムモジュールとして、例えばハードディスクに記憶される。具体的には、上記実施例で説明したヘッダ情報読出部211と同様の処理を実行する手順と、輪郭領域特定部212と同様の処理を実行する手順とが記述されたプログラムモジュールが、ハードディスクに記憶される。そして、CPUが、ハードディスクに記憶されたプログラムモジュールやプログラムデータを必要に応じてRAMに読み出し、上記手順を実行する。
【0127】
なお、符号化プログラムに係るプログラムモジュールやプログラムデータ、又は、輪郭抽出プログラムに係るプログラムモジュールやプログラムデータは、ハードディスクに記憶される場合に限られず、例えば着脱可能な記憶媒体に記憶され、ディスクドライブ等を介してCPUによって読み出されてもよい。あるいは、符号化プログラムに係るプログラムモジュールやプログラムデータ、又は、輪郭抽出プログラムに係るプログラムモジュールやプログラムデータは、ネットワーク(LAN(Local Area Network)、WAN(Wide Area Network)等)を介して接続された他のコンピュータに記憶され、ネットワークインタフェースを介してCPUによって読み出されてもよい。
【符号の説明】
【0128】
10、20、30、40 輪郭抽出システム
100 符号化装置
200 復号化装置
210 輪郭抽出部
211 ヘッダ情報読出部
212 輪郭領域特定部
213 輪郭画像生成部
214 輪郭画像表示部
215 輪郭抽出補完部
270 選択部
280 出力部
300 復号化装置
310 輪郭抽出部
313 輪郭画像生成部
313a 対象物判定部
313b 加工部
370 選択部
400 復号化装置
490 警告部
【特許請求の範囲】
【請求項1】
符号化装置は、
対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する検出部と、
前記検出部によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフィールド予測モード符号化部と、
前記検出部によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフレーム予測モード符号化部と、
前記フィールド予測モード符号化部によって前記マクロブロックを符号化した場合の第1符号化量と、前記フレーム予測モード符号化部によって前記マクロブロックを符号化した場合の第2符号化量とを比較し、比較の結果、第1符号化量が第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、前記マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する選択部と、
前記選択部によって選択された予測モードに従って前記画像データを符号化する符号化部と
を備え、
復号化装置は、
前記符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、
前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、
前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域の画像データを他の画像データに加工する加工部と
を備えたことを特徴とする輪郭抽出システム。
【請求項2】
対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、
前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、
前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工部と
を備えたことを特徴とする輪郭抽出装置。
【請求項3】
前記加工部は、
前記対象物判定部によって判定された前記対象物が示す物体を想起させる画像である代替用画像を前記輪郭領域に配置する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項4】
前記加工部は、
前記輪郭領域内の各画素値に所定の値を加算又は減算する、又は、前記輪郭領域内の各画素値の配置を変更する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項5】
監視者に警告を通知する警告部をさらに備え、
前記検出部は、
異なる時刻に撮影された対象物が描出されている画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出し、
前記特定部は、
各時刻に対応する画像データについて、前記対象物の輪郭に相当する領域を特定し、
前記警告部は、
前記特定部によって特定された各時刻に対応する画像データの輪郭に基づいて、前記対象物の移動量を算出し、該移動量が所定の閾値以上であるか、又は、該移動量が所定の閾値以下である場合に、警告を通知する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項6】
対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出手順と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定手順と、
前記特定手順によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定手順と、
前記対象物判定手順によって前記対象物が示す物体を判定された場合に、前記特定手順によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工手順と
をコンピュータに実行させることを特徴とする輪郭抽出プログラム。
【請求項1】
符号化装置は、
対象物が描出された画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出する検出部と、
前記検出部によって検出された動きベクトルのうちフィールド予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフィールド予測モード符号化部と、
前記検出部によって検出された動きベクトルのうちフレーム予測モード用の動きベクトルを用いて前記マクロブロックを符号化するフレーム予測モード符号化部と、
前記フィールド予測モード符号化部によって前記マクロブロックを符号化した場合の第1符号化量と、前記フレーム予測モード符号化部によって前記マクロブロックを符号化した場合の第2符号化量とを比較し、比較の結果、第1符号化量が第2符号化量に比較して所定閾値以上小さいと判定されたことを条件として、前記マクロブロックの符号化に用いる予測モードとしてフィールド予測モードを選択する選択部と、
前記選択部によって選択された予測モードに従って前記画像データを符号化する符号化部と
を備え、
復号化装置は、
前記符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、
前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、
前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域の画像データを他の画像データに加工する加工部と
を備えたことを特徴とする輪郭抽出システム。
【請求項2】
対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出部と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定部と、
前記特定部によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定部と、
前記対象物判定部によって前記対象物が示す物体を判定された場合に、前記特定部によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工部と
を備えたことを特徴とする輪郭抽出装置。
【請求項3】
前記加工部は、
前記対象物判定部によって判定された前記対象物が示す物体を想起させる画像である代替用画像を前記輪郭領域に配置する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項4】
前記加工部は、
前記輪郭領域内の各画素値に所定の値を加算又は減算する、又は、前記輪郭領域内の各画素値の配置を変更する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項5】
監視者に警告を通知する警告部をさらに備え、
前記検出部は、
異なる時刻に撮影された対象物が描出されている画像データをマクロブロック毎に符号化するにあたり動きベクトルを検出し、
前記特定部は、
各時刻に対応する画像データについて、前記対象物の輪郭に相当する領域を特定し、
前記警告部は、
前記特定部によって特定された各時刻に対応する画像データの輪郭に基づいて、前記対象物の移動量を算出し、該移動量が所定の閾値以上であるか、又は、該移動量が所定の閾値以下である場合に、警告を通知する
ことを特徴とする請求項2に記載の輪郭抽出装置。
【請求項6】
対象物が描出された画像データであって符号化装置によって符号化された符号化データに含まれるヘッダ情報から、ピクチャ毎に該ピクチャの構造を示すピクチャ構造情報を読み出すとともに、該ピクチャに含まれるマクロブロック毎に該マクロブロックの符号化に用いられた予測モードを示す予測モード情報を読み出す読出手順と、
前記ピクチャ構造情報および前記予測モード情報をマクロブロック毎に判定し、該ピクチャ構造情報がフレーム構造を示し、かつ、該予測モード情報がフィールド予測モードを示す場合に、該マクロブロックの画像上の位置を前記対象物の輪郭に相当する領域として特定する特定手順と、
前記特定手順によって特定された輪郭に相当する領域に基づいて、前記対象物が示す物体を判定する対象物判定手順と、
前記対象物判定手順によって前記対象物が示す物体を判定された場合に、前記特定手順によって特定された輪郭に囲まれた領域である輪郭領域の画像データを他の画像データに加工する加工手順と
をコンピュータに実行させることを特徴とする輪郭抽出プログラム。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】

【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−66016(P2013−66016A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202932(P2011−202932)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【出願人】(500489509)アイベックステクノロジー株式会社 (9)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【出願人】(500489509)アイベックステクノロジー株式会社 (9)
【Fターム(参考)】
[ Back to top ]