
農作業機
【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4の状態を表示する状態表示手段80を備える。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4の状態を表示する状態表示手段80を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業者の負担を軽減できる農作業機に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に記載された農作業機が知られている。
【0003】
この従来の農作業機は、走行車であるトラクタの後部に連結される機体と、この機体に回転可能に設けられた耕耘体と、機体に左右方向の軸を中心として上下方向に回動可能に設けられた整地体とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−218316号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
そして、このような農作業機に関し、作業者の負担を軽減できるものが求められている。
【0006】
本発明は、このような点に鑑みなされたもので、作業者の負担を軽減できる農作業機を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載の農作業機は、走行車に連結される機体と、この機体に回転可能に設けられた耕耘体と、前記機体に上下方向に回動可能に設けられた整地体と、この整地体の状態を表示する状態表示手段とを備えるものである。
【0008】
請求項2記載の農作業機は、請求項1記載の農作業機において、状態表示手段は、走行車に乗った作業者から目視可能な位置に設けられているものである。
【0009】
請求項3記載の農作業機は、請求項1または2記載の農作業機において、状態表示手段は、状態表示用目印が表面に付された被指示部と、整地体の上下回動に基づくこの整地体の状態変化に応じて前記被指示部の表面に沿って移動する指示部とを有するものである。
【0010】
請求項4記載の農作業機は、請求項3記載の農作業機において、被指示部は、湾曲板状の固定板にて構成され、前記被指示部の表面には、整地体の接地圧の大きさを示す数表示が付されているものである。
【0011】
請求項5記載の農作業機は、請求項3または4記載の農作業機において、指示部は、被指示部の表面と対向する板部にて構成されているものである。
【発明の効果】
【0012】
本発明によれば、整地体の状態を表示する状態表示手段を備えるため、この状態表示手段を見て整地体の状態を容易に確認でき、作業者の負担を軽減できる。
【図面の簡単な説明】
【0013】
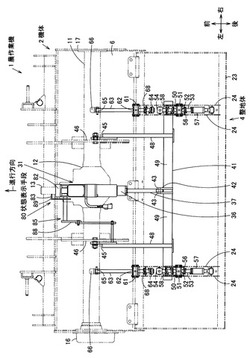
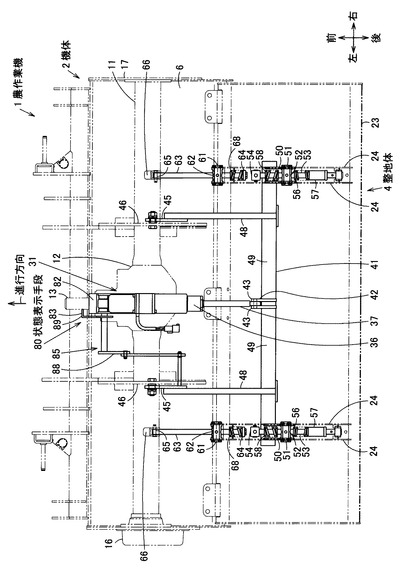
【図1】本発明の一実施の形態に係る農作業機の平面図である。
【図2】同上農作業機の整地体メンテナンス作業状態時の側面図である。
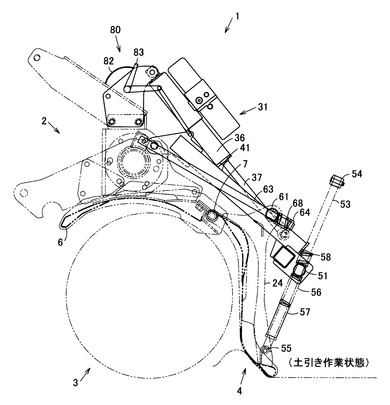
【図3】同上農作業機の整地体土引き作業状態時の側面図である。
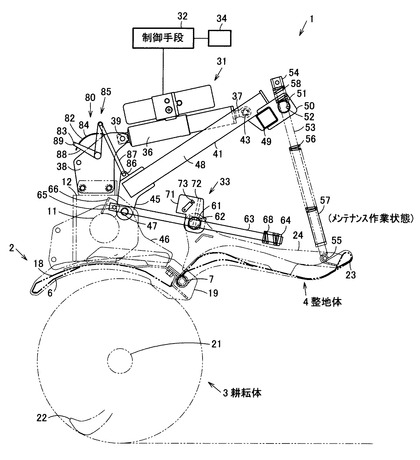
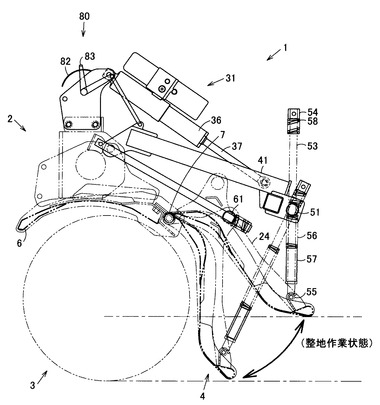
【図4】同上農作業機の整地体整地作業状態時の側面図である。
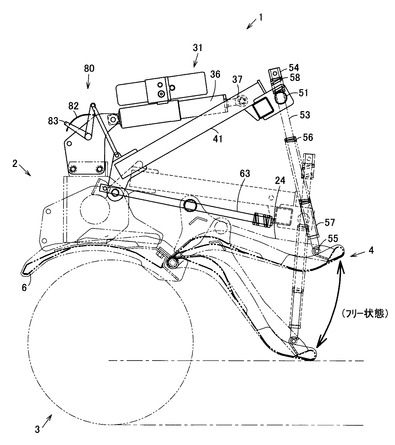
【図5】同上農作業機の整地体フリー状態時の側面図である。
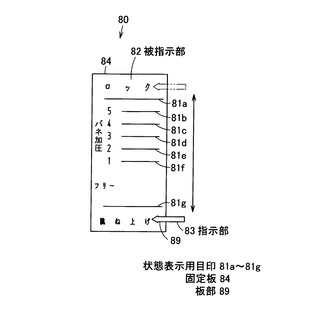
【図6】同上農作業機の状態表示手段の指示部および被指示部を示す正面図である。
【発明を実施するための形態】
【0014】
本発明の一実施の形態について図面を参照して説明する。
【0015】
図1ないし図5において、1は農作業機で、この農作業機1は、例えば走行車であるトラクタ(図示せず)の後部に連結されて使用される耕耘整地作業機(ロータリー)である。つまり、農作業機1は、トラクタの後部に連結された状態で、トラクタの走行により進行方向である前方に向かって圃場上を移動しながら耕耘整地作業および土引き作業をするロータリー耕耘装置である。
【0016】
農作業機1は、図示しないトラクタの後部の3点リンク部(作業機昇降装置)に連結された機体2と、機体2に回転可能に設けられトラクタ側から動力を受けて所定方向に回転しながら耕耘作業をする耕耘体3と、機体2の耕耘カバー部6の後端部に左右方向の軸(回動支点)7を中心として上下方向に回動可能に設けられ耕耘体3の後方で主として整地作業をする1枚板状の整地体(均平板)4とを備えている。
【0017】
機体2は、左右方向長手状で円筒状のフレーム部であるフレームパイプ部11を有している。フレームパイプ部11の左右方向中央部にはギアボックス部12が設けられ、このギアボックス部12から入力軸13が前方に向かって突出している。入力軸13は、トラクタのPTO軸(図示せず)に、ユニバーサルジョイントおよび伝動シャフト等にて構成された伝動手段(図示せず)を介して接続されている。
【0018】
フレームパイプ部11の長手方向一端部である左端部には、箱状の伝動ケース部であるチェーンケース部16の上部が取り付けられている。フレームパイプ部11の長手方向他端部である右端部には、板状のブラケット部17の上部が取り付けられている。そして、互いに離間対向するチェーンケース部16およびブラケット部17に耕耘体3が回転可能に架設されている。
【0019】
また、機体2の耕耘カバー部6は、耕耘体3の上方部を覆う湾曲板状のカバー本体板18と、このカバー本体板18の左右方向両端部に設けられたカバー側板19とを有している。そして、耕耘カバー部6のカバー本体板18の後端部に整地体4の前端部(上端部)が軸7を中心として回動可能に取り付けられている。
【0020】
耕耘体3は、左のチェーンケース部16の下部と右のブラケット部17の下部とにて回転可能に支持された左右方向の耕耘軸である回転軸21を有している。回転軸21には、フレームパイプ部11内の伝動シャフトおよびチェーンケース部16内のチェーン等にて構成された伝動手段(図示せず)から動力を受けて回転する。回転軸21には、この回転軸21とともに回転しながら耕耘作業をする複数の耕耘爪22が脱着可能に取り付けられている。
【0021】
整地体4は、耕耘カバー部6のカバー本体板18の後端部に軸7を中心として上下方向に回動可能に取り付けられた整地本体板23を有している。整地本体板23の上面における左右両側には、互いに離間対向する対向板24がそれぞれ対をなして立設されている。
【0022】
また、農作業機1は、整地体4を耕耘体3のメンテナンス作業が可能な水平姿勢のメンテナンス作業状態になるまで機体2に対して上方に回動させる伸縮可能な駆動手段31と、この駆動手段31を制御する制御手段32と、整地体4のメンテナンス作業状態時にこの整地体4を機体2に対して解除可能にロックするロック手段33とを備えている。なお、制御手段32には、例えばトラクタに乗った作業者が駆動手段31を遠隔操作するための操作手段34が有線或いは無線を介して電気的に接続されている。
【0023】
そして、制御手段32による駆動手段31の制御に基づき、整地体4は、駆動手段31の伸縮に応じて、整地作業状態、土引き作業状態(ロック状態)、メンテナンス作業状態(ロック状態)およびフリー状態に選択的に切り換えられる。つまり、整地体4は、作業者の人力ではなく、駆動手段31から出力される動力で上下方向に回動し、4つの各状態にそれぞれ切り換え可能となっている。また、制御手段32による駆動手段31の制御に基づいて、整地体4の整地作業状態時における整地体4の接地圧が無段階に調整可能となっている。
【0024】
駆動手段31は、例えば直流電動機、油圧ポンプ、油圧バルブおよび油圧シリンダを一体化した電動油圧シリンダにて構成されたもので、この電動油圧シリンダ自体が伸縮することにより整地体4を機体2に対して軸7を中心として上下方向に回動させる。駆動手段31は、シリンダ本体部36と、このシリンダ本体部36内に対して出入りするロッド部37とを有している。
【0025】
シリンダ本体部36の前端部は、機体2のギアボックス部12に固設された板状のシリンダ取付部(駆動手段取付部)38に軸39を中心として回動可能に取り付けられている。ロッド部37の後端部は、駆動手段31の伸縮に連動して機体2に対して回動する回動体である回動フレーム(支持フレーム)41のロッド取付部42に軸43を中心として回動可能に取り付けられている。回動フレーム41は、平面視で略コ字状のもので、2つの前端部に取付板部45を有し、この各取付板部45が機体2のフレームパイプ部11に固設された板状のフレーム取付部46に軸47を中心として回動可能に取り付けられている。
【0026】
つまり、回動フレーム41は、互いに離間対向する前後方向長手状で板状の左右1対の対向フレーム部48と、この各対向フレーム部48の前端部に固設された取付板部45と、両対向フレーム部48の後端部同士を連結する左右方向長手状で角筒状の連結フレーム部49と、この連結フレーム部49の左右方向中央部に固設されたロッド取付部42と、連結フレーム部49の左右方向両端部にそれぞれ固設された回動部材取付部50とを有している。
【0027】
そして、回動フレーム41の左右の各回動部材取付部50には、円筒状の回動部材(タンブラ)51が回動可能に取り付けられている。この回動部材51に形成されたロッド挿通用孔部52には、整地体4を支持するロッド部材である第1ロッド(浮き上り調節ロッド)53がスライド可能に挿通されている。
【0028】
第1ロッド53の上端部には抜止部54が設けられている。第1ロッド53の下端部は、整地体4の対向板24の後端部に軸55を中心として回動可能に取り付けられている。また、第1ロッド53の下側外周、つまり第1ロッド53のうち回動部材51よりも下方に位置する部分の外周には、整地体4の整地作業状態時にこの整地体4を下方に向けて付勢する整地体付勢用の弾性部材である第1コイルばね56および筒状部材であるカラー57が設けられている。第1ロッド53の上側外周、つまり第1ロッド53のうち回動部材51よりも上方に位置する部分の外周には、緩衝用の弾性部材である第2コイルばね58が設けられている。
【0029】
また、整地体4の左右の各対向板24の前端部には、ロック手段33の円筒状の回動部材(タンブラ)61が回動可能に取り付けられている。この回動部材61に形成されたロッド挿通用孔部62には、整地体4を支持するロッド部材である第2ロッド(下限用ロッド)63がスライド可能に挿通されている。
【0030】
第2ロッド63の後端部には抜止部64が設けられている。第2ロッド63の前端部は、機体2のフレームパイプ部11に固設されたロッド取付部66に軸65を中心として回動可能に取り付けられている。また、第2ロッド63の後側外周、つまり第2ロッド63のうち回動部材61よりも後方に位置する部分の外周には、緩衝用の弾性部材である第3コイルばね68が設けられている。
【0031】
なお、ロック手段33は、例えば特開2005−218316号公報に記載されたようなもので、回動部材(ロッド被挿通体)61、本体部材71、この本体部材71に上下動可能に設けられたロックピンであるストッパピン72、本体部材71に回動可能に設けられた操作レバー73等にて構成されている(図2参照)。
【0032】
また、農作業機1は、整地体4が整地作業状態、土引き作業状態、メンテナンス作業状態およびフリー状態のいずれの状態にあるのかを表示する状態表示手段80を備えている。この状態表示手段80は、例えばトラクタに乗った作業者から目視可能な位置に設けられている。
【0033】
状態表示手段80は、図6に示されるように、状態表示用目印(目盛)81a〜81gが表面に付された被指示部82と、整地体4の上下回動に基づく整地体4の状態変化に応じて被指示部82の表面に沿って移動する指示部83とを有している。
【0034】
被指示部82は、機体2のシリンダ取付部38に固設された湾曲板状の固定板84にて構成されている。被指示部82の表面である上面には、線表示である状態表示用目印81a〜81gのほか、土引き作業状態(土引きロック状態)を示す「ロック」という文字表示、フリー状態を示す「フリー」という文字表示、メンテナンス作業状態(跳ね上げ状態)を示す「跳ね上げ」という文字表示、「バネ加圧」という文字表示、整地体4の整地作業状態時における整地体4の接地圧の大きさを示す「1」〜「5」という数表示が付されている。なお、「1」側から「5」側に向かって徐々に接地圧が強くなる。
【0035】
また、指示部83は、回動フレーム41の上下回動に連動する連動手段85の一部にて構成されている。連動手段85は、回動フレーム41の片側の取付板部45に固定された固定軸86と、この固定軸86に回動可能に連結された第1連結部材87と、この第1連結部材87に回動可能に連結された第2連結部材88とを有している。第2連結部材88は、機体2のシリンダ取付部38の側面に回動可能に取り付けられている。第2連結部材88は、被指示部82と対向する矢印形状の板部89を有し、この板部89にて指示部83が構成されている。
【0036】
次に、農作業機1の作用等を説明する。
【0037】
図2には、整地体4のメンテナンス作業状態(跳ね上げ状態)が示されている。
【0038】
この整地体4のメンテナンス作業状態とは、整地体4が駆動手段31の縮み動作によって所定の上限位置まで上方に回動して水平姿勢となった状態(ロック状態)であって、耕耘体3全体が後方に向かって露出して作業者による耕耘体3のメンテナンス作業が可能な状態である。
【0039】
また、この状態では、整地体4は駆動手段31およびロック手段33によって機体2に対してロックされ、回動部材51は第2コイルばね58に接触している。なお、このとき、状態表示手段80の指示部83は、状態表示用目印81gと被指示部82の端部(図6上、下端部)との間の位置を指示している。
【0040】
そして、この状態で、作業者は、耕耘体3のメンテナンス作業(例えば耕耘爪22の交換や洗浄等)や、耕耘カバー部6の下面の洗浄および整地体4の作業面の洗浄等を行う。
【0041】
図3には、整地体4の土引き作業状態(ロック状態)が示されている。
【0042】
この整地体4の土引き作業状態とは、整地体4が駆動手段31の伸び動作によって所定の下限位置まで下方に回動して鉛直姿勢となった状態(ロック状態)であって、整地体4が耕耘体3の後方で圃場の土を引く土引き作業をする状態である。
【0043】
また、この状態では、整地体4は駆動手段31によって機体2に対してロックされ、回動部材61は第3コイルばね68に接触している。さらに、この状態では、第1コイルばね56は、回動部材51とカラー57とで挟持されて略最大限に圧縮した状態となっている。なお、このとき、状態表示手段80の指示部83は、状態表示用目印81aと被指示部82の端部(図6上、上端部)との間の位置を指示している。
【0044】
そして、この状態で、トラクタの走行により農作業機1全体を移動させると、土引き作業状態の整地体4にて土引き作業が行われる。
【0045】
図4には、整地体4の整地作業状態が示されている。
【0046】
この整地体4の整地作業状態とは、整地体4が機体2に対して所定範囲内で上下方向に回動可能な状態であって、整地体4が予め設定した接地圧をもって耕耘体3の後方で圃場面を均す整地作業をする状態である。この図4の状態では、状態表示手段80の指示部83は、バネ加圧の「4」に対応した状態表示用目印81cを指示している。
【0047】
なお、予め設定する整地体4の接地圧、つまり耕耘整地作業時において整地体4が圧縮状態の第1コイルばね56から受ける下方への付勢力(バネ加圧)は、駆動手段31の伸縮により調整可能である。つまり、作業者は、圃場の土質等に応じて操作手段34を操作して駆動手段31を伸縮させることにより整地体4の接地圧を設定する。
【0048】
そして、この状態で、トラクタの走行により農作業機1全体を移動させると、耕耘体3にて耕耘作業が行われ、整地体4にて整地作業が行われる。
【0049】
図5には、整地体4のフリー状態が示されている。
【0050】
この整地体4のフリー状態(非作業状態)とは、整地体4が所定範囲のフリー位置に位置する状態である。このフリー位置は、第1コイルばね56が自然長(非圧縮状態)になった位置から整地体4がメンテナンス作業状態になる直前までの位置である。このとき、状態表示手段80の指示部83は、状態表示用目印81fと状態表示用目印81gとの間の位置を指示している。
【0051】
なお、基本的には整地体4のフリー状態時にこの整地体4で整地作業を行わないが、圃場の状態によっては整地体4をフリー状態に設定して整地作業を行うことも可能である。
【0052】
そして、このような農作業機1によれば、比較的重い整地体4を耕耘体3のメンテナンス作業が可能なメンテナンス作業状態になるまで機体2に対して上方に回動させる駆動手段31を備えるため、従来とは異なり作業者が手動で整地体をメンテナンス作業状態になるまで上方に回動させる必要がなく、作業者の負担を軽減でき、よって、例えば高齢な作業者や女性の作業者にとっても使い勝手が良好である。
【0053】
また、整地体4は制御手段32による駆動手段31の制御に基づいて少なくとも整地作業状態、土引き作業状態およびメンテナンス作業状態に選択的に切り換えられるため、整地体4の状態を容易に切り換えることができ、作業者の負担をより一層軽減できる。
【0054】
さらに、整地体4が少なくとも整地作業状態、土引き作業状態およびメンテナンス作業状態のいずれの状態にあるのかを表示する状態表示手段80を備えるため、この状態表示手段80を見て整地体4の状態を容易に確認でき、作業者の負担をさらに軽減できる。
【0055】
また、整地体4のメンテナンス作業状態時にこの整地体4を機体2に対してロックするロック手段33を備えるため、このロック手段33と駆動手段31とによってメンテナンス作業状態の整地体4を2重にロックでき、安全性にも優れている。
【0056】
なお、駆動手段31は、電動油圧シリンダには限定されず、例えば油圧シリンダ、電動シリンダ、油圧モータ或いは電動モータ等でもよい。
【0057】
また、農作業機1は、機体2の中央に設けられた単一の駆動手段31を備えた構成には限定されず、駆動手段31を複数設けた構成等でもよい。
【0058】
さらに、状態表示手段80は、トラクタに乗った作業者から目視可能な位置に設けることが好ましいが、例えばトラクタから降りた作業者から見える位置に設けてもよい。
【符号の説明】
【0059】
1 農作業機
2 機体
3 耕耘体
4 整地体
80 状態表示手段
81a〜81g 状態表示用目印
82 被指示部
83 指示部
84 固定板
89 板部
【技術分野】
【0001】
本発明は、作業者の負担を軽減できる農作業機に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に記載された農作業機が知られている。
【0003】
この従来の農作業機は、走行車であるトラクタの後部に連結される機体と、この機体に回転可能に設けられた耕耘体と、機体に左右方向の軸を中心として上下方向に回動可能に設けられた整地体とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−218316号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
そして、このような農作業機に関し、作業者の負担を軽減できるものが求められている。
【0006】
本発明は、このような点に鑑みなされたもので、作業者の負担を軽減できる農作業機を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載の農作業機は、走行車に連結される機体と、この機体に回転可能に設けられた耕耘体と、前記機体に上下方向に回動可能に設けられた整地体と、この整地体の状態を表示する状態表示手段とを備えるものである。
【0008】
請求項2記載の農作業機は、請求項1記載の農作業機において、状態表示手段は、走行車に乗った作業者から目視可能な位置に設けられているものである。
【0009】
請求項3記載の農作業機は、請求項1または2記載の農作業機において、状態表示手段は、状態表示用目印が表面に付された被指示部と、整地体の上下回動に基づくこの整地体の状態変化に応じて前記被指示部の表面に沿って移動する指示部とを有するものである。
【0010】
請求項4記載の農作業機は、請求項3記載の農作業機において、被指示部は、湾曲板状の固定板にて構成され、前記被指示部の表面には、整地体の接地圧の大きさを示す数表示が付されているものである。
【0011】
請求項5記載の農作業機は、請求項3または4記載の農作業機において、指示部は、被指示部の表面と対向する板部にて構成されているものである。
【発明の効果】
【0012】
本発明によれば、整地体の状態を表示する状態表示手段を備えるため、この状態表示手段を見て整地体の状態を容易に確認でき、作業者の負担を軽減できる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施の形態に係る農作業機の平面図である。
【図2】同上農作業機の整地体メンテナンス作業状態時の側面図である。
【図3】同上農作業機の整地体土引き作業状態時の側面図である。
【図4】同上農作業機の整地体整地作業状態時の側面図である。
【図5】同上農作業機の整地体フリー状態時の側面図である。
【図6】同上農作業機の状態表示手段の指示部および被指示部を示す正面図である。
【発明を実施するための形態】
【0014】
本発明の一実施の形態について図面を参照して説明する。
【0015】
図1ないし図5において、1は農作業機で、この農作業機1は、例えば走行車であるトラクタ(図示せず)の後部に連結されて使用される耕耘整地作業機(ロータリー)である。つまり、農作業機1は、トラクタの後部に連結された状態で、トラクタの走行により進行方向である前方に向かって圃場上を移動しながら耕耘整地作業および土引き作業をするロータリー耕耘装置である。
【0016】
農作業機1は、図示しないトラクタの後部の3点リンク部(作業機昇降装置)に連結された機体2と、機体2に回転可能に設けられトラクタ側から動力を受けて所定方向に回転しながら耕耘作業をする耕耘体3と、機体2の耕耘カバー部6の後端部に左右方向の軸(回動支点)7を中心として上下方向に回動可能に設けられ耕耘体3の後方で主として整地作業をする1枚板状の整地体(均平板)4とを備えている。
【0017】
機体2は、左右方向長手状で円筒状のフレーム部であるフレームパイプ部11を有している。フレームパイプ部11の左右方向中央部にはギアボックス部12が設けられ、このギアボックス部12から入力軸13が前方に向かって突出している。入力軸13は、トラクタのPTO軸(図示せず)に、ユニバーサルジョイントおよび伝動シャフト等にて構成された伝動手段(図示せず)を介して接続されている。
【0018】
フレームパイプ部11の長手方向一端部である左端部には、箱状の伝動ケース部であるチェーンケース部16の上部が取り付けられている。フレームパイプ部11の長手方向他端部である右端部には、板状のブラケット部17の上部が取り付けられている。そして、互いに離間対向するチェーンケース部16およびブラケット部17に耕耘体3が回転可能に架設されている。
【0019】
また、機体2の耕耘カバー部6は、耕耘体3の上方部を覆う湾曲板状のカバー本体板18と、このカバー本体板18の左右方向両端部に設けられたカバー側板19とを有している。そして、耕耘カバー部6のカバー本体板18の後端部に整地体4の前端部(上端部)が軸7を中心として回動可能に取り付けられている。
【0020】
耕耘体3は、左のチェーンケース部16の下部と右のブラケット部17の下部とにて回転可能に支持された左右方向の耕耘軸である回転軸21を有している。回転軸21には、フレームパイプ部11内の伝動シャフトおよびチェーンケース部16内のチェーン等にて構成された伝動手段(図示せず)から動力を受けて回転する。回転軸21には、この回転軸21とともに回転しながら耕耘作業をする複数の耕耘爪22が脱着可能に取り付けられている。
【0021】
整地体4は、耕耘カバー部6のカバー本体板18の後端部に軸7を中心として上下方向に回動可能に取り付けられた整地本体板23を有している。整地本体板23の上面における左右両側には、互いに離間対向する対向板24がそれぞれ対をなして立設されている。
【0022】
また、農作業機1は、整地体4を耕耘体3のメンテナンス作業が可能な水平姿勢のメンテナンス作業状態になるまで機体2に対して上方に回動させる伸縮可能な駆動手段31と、この駆動手段31を制御する制御手段32と、整地体4のメンテナンス作業状態時にこの整地体4を機体2に対して解除可能にロックするロック手段33とを備えている。なお、制御手段32には、例えばトラクタに乗った作業者が駆動手段31を遠隔操作するための操作手段34が有線或いは無線を介して電気的に接続されている。
【0023】
そして、制御手段32による駆動手段31の制御に基づき、整地体4は、駆動手段31の伸縮に応じて、整地作業状態、土引き作業状態(ロック状態)、メンテナンス作業状態(ロック状態)およびフリー状態に選択的に切り換えられる。つまり、整地体4は、作業者の人力ではなく、駆動手段31から出力される動力で上下方向に回動し、4つの各状態にそれぞれ切り換え可能となっている。また、制御手段32による駆動手段31の制御に基づいて、整地体4の整地作業状態時における整地体4の接地圧が無段階に調整可能となっている。
【0024】
駆動手段31は、例えば直流電動機、油圧ポンプ、油圧バルブおよび油圧シリンダを一体化した電動油圧シリンダにて構成されたもので、この電動油圧シリンダ自体が伸縮することにより整地体4を機体2に対して軸7を中心として上下方向に回動させる。駆動手段31は、シリンダ本体部36と、このシリンダ本体部36内に対して出入りするロッド部37とを有している。
【0025】
シリンダ本体部36の前端部は、機体2のギアボックス部12に固設された板状のシリンダ取付部(駆動手段取付部)38に軸39を中心として回動可能に取り付けられている。ロッド部37の後端部は、駆動手段31の伸縮に連動して機体2に対して回動する回動体である回動フレーム(支持フレーム)41のロッド取付部42に軸43を中心として回動可能に取り付けられている。回動フレーム41は、平面視で略コ字状のもので、2つの前端部に取付板部45を有し、この各取付板部45が機体2のフレームパイプ部11に固設された板状のフレーム取付部46に軸47を中心として回動可能に取り付けられている。
【0026】
つまり、回動フレーム41は、互いに離間対向する前後方向長手状で板状の左右1対の対向フレーム部48と、この各対向フレーム部48の前端部に固設された取付板部45と、両対向フレーム部48の後端部同士を連結する左右方向長手状で角筒状の連結フレーム部49と、この連結フレーム部49の左右方向中央部に固設されたロッド取付部42と、連結フレーム部49の左右方向両端部にそれぞれ固設された回動部材取付部50とを有している。
【0027】
そして、回動フレーム41の左右の各回動部材取付部50には、円筒状の回動部材(タンブラ)51が回動可能に取り付けられている。この回動部材51に形成されたロッド挿通用孔部52には、整地体4を支持するロッド部材である第1ロッド(浮き上り調節ロッド)53がスライド可能に挿通されている。
【0028】
第1ロッド53の上端部には抜止部54が設けられている。第1ロッド53の下端部は、整地体4の対向板24の後端部に軸55を中心として回動可能に取り付けられている。また、第1ロッド53の下側外周、つまり第1ロッド53のうち回動部材51よりも下方に位置する部分の外周には、整地体4の整地作業状態時にこの整地体4を下方に向けて付勢する整地体付勢用の弾性部材である第1コイルばね56および筒状部材であるカラー57が設けられている。第1ロッド53の上側外周、つまり第1ロッド53のうち回動部材51よりも上方に位置する部分の外周には、緩衝用の弾性部材である第2コイルばね58が設けられている。
【0029】
また、整地体4の左右の各対向板24の前端部には、ロック手段33の円筒状の回動部材(タンブラ)61が回動可能に取り付けられている。この回動部材61に形成されたロッド挿通用孔部62には、整地体4を支持するロッド部材である第2ロッド(下限用ロッド)63がスライド可能に挿通されている。
【0030】
第2ロッド63の後端部には抜止部64が設けられている。第2ロッド63の前端部は、機体2のフレームパイプ部11に固設されたロッド取付部66に軸65を中心として回動可能に取り付けられている。また、第2ロッド63の後側外周、つまり第2ロッド63のうち回動部材61よりも後方に位置する部分の外周には、緩衝用の弾性部材である第3コイルばね68が設けられている。
【0031】
なお、ロック手段33は、例えば特開2005−218316号公報に記載されたようなもので、回動部材(ロッド被挿通体)61、本体部材71、この本体部材71に上下動可能に設けられたロックピンであるストッパピン72、本体部材71に回動可能に設けられた操作レバー73等にて構成されている(図2参照)。
【0032】
また、農作業機1は、整地体4が整地作業状態、土引き作業状態、メンテナンス作業状態およびフリー状態のいずれの状態にあるのかを表示する状態表示手段80を備えている。この状態表示手段80は、例えばトラクタに乗った作業者から目視可能な位置に設けられている。
【0033】
状態表示手段80は、図6に示されるように、状態表示用目印(目盛)81a〜81gが表面に付された被指示部82と、整地体4の上下回動に基づく整地体4の状態変化に応じて被指示部82の表面に沿って移動する指示部83とを有している。
【0034】
被指示部82は、機体2のシリンダ取付部38に固設された湾曲板状の固定板84にて構成されている。被指示部82の表面である上面には、線表示である状態表示用目印81a〜81gのほか、土引き作業状態(土引きロック状態)を示す「ロック」という文字表示、フリー状態を示す「フリー」という文字表示、メンテナンス作業状態(跳ね上げ状態)を示す「跳ね上げ」という文字表示、「バネ加圧」という文字表示、整地体4の整地作業状態時における整地体4の接地圧の大きさを示す「1」〜「5」という数表示が付されている。なお、「1」側から「5」側に向かって徐々に接地圧が強くなる。
【0035】
また、指示部83は、回動フレーム41の上下回動に連動する連動手段85の一部にて構成されている。連動手段85は、回動フレーム41の片側の取付板部45に固定された固定軸86と、この固定軸86に回動可能に連結された第1連結部材87と、この第1連結部材87に回動可能に連結された第2連結部材88とを有している。第2連結部材88は、機体2のシリンダ取付部38の側面に回動可能に取り付けられている。第2連結部材88は、被指示部82と対向する矢印形状の板部89を有し、この板部89にて指示部83が構成されている。
【0036】
次に、農作業機1の作用等を説明する。
【0037】
図2には、整地体4のメンテナンス作業状態(跳ね上げ状態)が示されている。
【0038】
この整地体4のメンテナンス作業状態とは、整地体4が駆動手段31の縮み動作によって所定の上限位置まで上方に回動して水平姿勢となった状態(ロック状態)であって、耕耘体3全体が後方に向かって露出して作業者による耕耘体3のメンテナンス作業が可能な状態である。
【0039】
また、この状態では、整地体4は駆動手段31およびロック手段33によって機体2に対してロックされ、回動部材51は第2コイルばね58に接触している。なお、このとき、状態表示手段80の指示部83は、状態表示用目印81gと被指示部82の端部(図6上、下端部)との間の位置を指示している。
【0040】
そして、この状態で、作業者は、耕耘体3のメンテナンス作業(例えば耕耘爪22の交換や洗浄等)や、耕耘カバー部6の下面の洗浄および整地体4の作業面の洗浄等を行う。
【0041】
図3には、整地体4の土引き作業状態(ロック状態)が示されている。
【0042】
この整地体4の土引き作業状態とは、整地体4が駆動手段31の伸び動作によって所定の下限位置まで下方に回動して鉛直姿勢となった状態(ロック状態)であって、整地体4が耕耘体3の後方で圃場の土を引く土引き作業をする状態である。
【0043】
また、この状態では、整地体4は駆動手段31によって機体2に対してロックされ、回動部材61は第3コイルばね68に接触している。さらに、この状態では、第1コイルばね56は、回動部材51とカラー57とで挟持されて略最大限に圧縮した状態となっている。なお、このとき、状態表示手段80の指示部83は、状態表示用目印81aと被指示部82の端部(図6上、上端部)との間の位置を指示している。
【0044】
そして、この状態で、トラクタの走行により農作業機1全体を移動させると、土引き作業状態の整地体4にて土引き作業が行われる。
【0045】
図4には、整地体4の整地作業状態が示されている。
【0046】
この整地体4の整地作業状態とは、整地体4が機体2に対して所定範囲内で上下方向に回動可能な状態であって、整地体4が予め設定した接地圧をもって耕耘体3の後方で圃場面を均す整地作業をする状態である。この図4の状態では、状態表示手段80の指示部83は、バネ加圧の「4」に対応した状態表示用目印81cを指示している。
【0047】
なお、予め設定する整地体4の接地圧、つまり耕耘整地作業時において整地体4が圧縮状態の第1コイルばね56から受ける下方への付勢力(バネ加圧)は、駆動手段31の伸縮により調整可能である。つまり、作業者は、圃場の土質等に応じて操作手段34を操作して駆動手段31を伸縮させることにより整地体4の接地圧を設定する。
【0048】
そして、この状態で、トラクタの走行により農作業機1全体を移動させると、耕耘体3にて耕耘作業が行われ、整地体4にて整地作業が行われる。
【0049】
図5には、整地体4のフリー状態が示されている。
【0050】
この整地体4のフリー状態(非作業状態)とは、整地体4が所定範囲のフリー位置に位置する状態である。このフリー位置は、第1コイルばね56が自然長(非圧縮状態)になった位置から整地体4がメンテナンス作業状態になる直前までの位置である。このとき、状態表示手段80の指示部83は、状態表示用目印81fと状態表示用目印81gとの間の位置を指示している。
【0051】
なお、基本的には整地体4のフリー状態時にこの整地体4で整地作業を行わないが、圃場の状態によっては整地体4をフリー状態に設定して整地作業を行うことも可能である。
【0052】
そして、このような農作業機1によれば、比較的重い整地体4を耕耘体3のメンテナンス作業が可能なメンテナンス作業状態になるまで機体2に対して上方に回動させる駆動手段31を備えるため、従来とは異なり作業者が手動で整地体をメンテナンス作業状態になるまで上方に回動させる必要がなく、作業者の負担を軽減でき、よって、例えば高齢な作業者や女性の作業者にとっても使い勝手が良好である。
【0053】
また、整地体4は制御手段32による駆動手段31の制御に基づいて少なくとも整地作業状態、土引き作業状態およびメンテナンス作業状態に選択的に切り換えられるため、整地体4の状態を容易に切り換えることができ、作業者の負担をより一層軽減できる。
【0054】
さらに、整地体4が少なくとも整地作業状態、土引き作業状態およびメンテナンス作業状態のいずれの状態にあるのかを表示する状態表示手段80を備えるため、この状態表示手段80を見て整地体4の状態を容易に確認でき、作業者の負担をさらに軽減できる。
【0055】
また、整地体4のメンテナンス作業状態時にこの整地体4を機体2に対してロックするロック手段33を備えるため、このロック手段33と駆動手段31とによってメンテナンス作業状態の整地体4を2重にロックでき、安全性にも優れている。
【0056】
なお、駆動手段31は、電動油圧シリンダには限定されず、例えば油圧シリンダ、電動シリンダ、油圧モータ或いは電動モータ等でもよい。
【0057】
また、農作業機1は、機体2の中央に設けられた単一の駆動手段31を備えた構成には限定されず、駆動手段31を複数設けた構成等でもよい。
【0058】
さらに、状態表示手段80は、トラクタに乗った作業者から目視可能な位置に設けることが好ましいが、例えばトラクタから降りた作業者から見える位置に設けてもよい。
【符号の説明】
【0059】
1 農作業機
2 機体
3 耕耘体
4 整地体
80 状態表示手段
81a〜81g 状態表示用目印
82 被指示部
83 指示部
84 固定板
89 板部
【特許請求の範囲】
【請求項1】
走行車に連結される機体と、
この機体に回転可能に設けられた耕耘体と、
前記機体に上下方向に回動可能に設けられた整地体と、
この整地体の状態を表示する状態表示手段と
を備えることを特徴とする農作業機。
【請求項2】
状態表示手段は、走行車に乗った作業者から目視可能な位置に設けられている
ことを特徴とする請求項1記載の農作業機。
【請求項3】
状態表示手段は、
状態表示用目印が表面に付された被指示部と、
整地体の上下回動に基づくこの整地体の状態変化に応じて前記被指示部の表面に沿って移動する指示部とを有する
ことを特徴とする請求項1または2記載の農作業機。
【請求項4】
被指示部は、湾曲板状の固定板にて構成され、
前記被指示部の表面には、整地体の接地圧の大きさを示す数表示が付されている
ことを特徴とする請求項3記載の農作業機。
【請求項5】
指示部は、被指示部の表面と対向する板部にて構成されている
ことを特徴とする請求項3または4記載の農作業機。
【請求項1】
走行車に連結される機体と、
この機体に回転可能に設けられた耕耘体と、
前記機体に上下方向に回動可能に設けられた整地体と、
この整地体の状態を表示する状態表示手段と
を備えることを特徴とする農作業機。
【請求項2】
状態表示手段は、走行車に乗った作業者から目視可能な位置に設けられている
ことを特徴とする請求項1記載の農作業機。
【請求項3】
状態表示手段は、
状態表示用目印が表面に付された被指示部と、
整地体の上下回動に基づくこの整地体の状態変化に応じて前記被指示部の表面に沿って移動する指示部とを有する
ことを特徴とする請求項1または2記載の農作業機。
【請求項4】
被指示部は、湾曲板状の固定板にて構成され、
前記被指示部の表面には、整地体の接地圧の大きさを示す数表示が付されている
ことを特徴とする請求項3記載の農作業機。
【請求項5】
指示部は、被指示部の表面と対向する板部にて構成されている
ことを特徴とする請求項3または4記載の農作業機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−63078(P2013−63078A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−257659(P2012−257659)
【出願日】平成24年11月26日(2012.11.26)
【分割の表示】特願2010−262101(P2010−262101)の分割
【原出願日】平成22年11月25日(2010.11.25)
【出願人】(000188009)松山株式会社 (285)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成24年11月26日(2012.11.26)
【分割の表示】特願2010−262101(P2010−262101)の分割
【原出願日】平成22年11月25日(2010.11.25)
【出願人】(000188009)松山株式会社 (285)
【Fターム(参考)】
[ Back to top ]