
農業機械の制御部適合性判定システムおよび農業機械の制御部適合性判定方法
【課題】制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムおよび、農業機械の適合性判定方法を提供する。
【解決手段】コントローラ(第1制御部)1Aとコントローラ(第2制御部)50Aとが最初に電気的に連結されたときに、コントローラ50Aが、コントローラ50Aに格納するロータリー耕耘機(第2作動部)50の固有情報である第2作動部情報をコントローラ1Aに送信して第2作動部初期情報として記憶する。そして、コントローラ1Aとコントローラ50Aとが電気的に切断された後、再び、コントローラ1Aとコントローラ50Aとが電気的に連結されたときに、コントローラ1Aがコントローラ1Aに格納されている第2作動部初期情報をコントローラ50Aに送信し、コントローラ50Aが、受信した第2作動部初期情報と第2作動部情報とを照合し、コントローラ1Aとコントローラ50Aとの適合性を判定する。
【解決手段】コントローラ(第1制御部)1Aとコントローラ(第2制御部)50Aとが最初に電気的に連結されたときに、コントローラ50Aが、コントローラ50Aに格納するロータリー耕耘機(第2作動部)50の固有情報である第2作動部情報をコントローラ1Aに送信して第2作動部初期情報として記憶する。そして、コントローラ1Aとコントローラ50Aとが電気的に切断された後、再び、コントローラ1Aとコントローラ50Aとが電気的に連結されたときに、コントローラ1Aがコントローラ1Aに格納されている第2作動部初期情報をコントローラ50Aに送信し、コントローラ50Aが、受信した第2作動部初期情報と第2作動部情報とを照合し、コントローラ1Aとコントローラ50Aとの適合性を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンなどの第1作動部と、その第1作動部の動作制御を行う第1制御部と、作業機などの第2作動部と、その第2作動部の動作制御を行う第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムおよび農業機械の制御部適合性判定方法に関する。
【背景技術】
【0002】
近年、CAN(Controller Area Network)の技術の普及にともなって、農業機械分野への適用も提案されてきた。たとえば、農業機械に備える各種の作動部の制御システムに適用されている。このうち特許文献1では、エンジン(第1作動部)と、脱穀装置(第2作動部)などを備えたコンバインに適用した技術が開示されている。この例では、エンジンと脱穀装置とはそれぞれ別のコントローラ(第1および第2制御部)によって制御されており、2つのコントローラがCANを用いてバス(通信路)によって接続されている。
【0003】
このコンバインでは、CANによって複数のコントローラの間を同一の通信プロトコルで通信するので、各コントローラ間の制御データのやりとりが円滑で、かつ、通信エラーの検出やエラー処理もスムーズに行うことができるという利点を有する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−59779号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
CANを農業機械の分野に適用したこの技術では、コンバインが作動中のときに、コンバインに備える各種の作動部の動作を監視、制御するものであった。一方、農業機械の各作動部を制御するコントローラが老朽化や破損して新しいコントローラに交換されるようなとき、誤って、作動部の規格に適合しないコントローラが取付けられてしまう場合がある。たとえば、トラクタの後部に連結する作業機(作動部)の場合、誤って作業機の出力規格を超える能力を要求するようなコントローラが取付けられてしまうと、作業機の動力源であるトラクタのエンジンに大きな負担がかかり、エンジン本体が破損しかねない。このようなコントローラの取り付けミスに対しては、これを防止するような仕組みが必要とされてきた。
【0006】
そこで、この発明の目的は、制御部の動作規格を容易かつ適切に適合判定できる農業機械の制御部適合性判定システムおよび、農業機械の適合性判定方法を提供することにある。
【課題を解決するための手段】
【0007】
このため請求項1に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたときに、
前記第2制御部が、該第2制御部に格納する前記第2作動部の固有情報である第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第1制御部が該第1制御部に格納されている前記第2作動部初期情報を前記第2制御部に送信し、該第2制御部が、受信した前記第2作動部初期情報と前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載の農業機械の制御部適合性判定システムにおいて、前記第2制御部が前記第1制御部と前記第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えることを特徴とする。
【0009】
請求項3に記載の発明は、請求項1に記載の農業機械の制御部適合性判定システムにおいて、前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする。
【0010】
請求項4に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作を制御する第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたとき、または、前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、
前記第2制御部は、前記第1制御部に対して、前記第1作動部の固有情報である前記第1作動部情報を前記第2制御部に送信するよう要求し、受信した前記第1作動部情報と前記第2制御部に格納されている前記第2作動部の固有情報である第2作動部情報とを照合して、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする。
【0011】
請求項5に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、
前記第1制御部と前記第2制御部とが伝送路を介して最初に電気的に連結されたときに、前記第2制御部が、前記第2作動部の固有情報としての第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第2制御部が、前記第1制御部に対して前記第2作動部初期情報を前記第2制御部に送信するよう要求する、初期情報送信要求ステップと、
前記第1制御部が、前記第2作動部初期情報を前記第2制御部に送信する、初期情報送信ステップと、
前記第2制御部が、前記第2作動部初期情報と前記第2制御部に記憶されている前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定する、適合性判定ステップとを備えることを特徴とする。
【0012】
請求項6に記載の発明は、請求項5に記載の農業機械の制御部適合性判定方法において、前記適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えることを特徴とする。
【0013】
請求項7に記載の発明は、請求項5に記載の農業機械の制御部適合性判定方法において、前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする。
【発明の効果】
【0014】
請求項1に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作制御を行う第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、第1制御部と第2制御部とが最初に電気的に連結されたときに、第2制御部が、第2制御部に格納する第2作動部の固有情報である第2作動部情報を第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第1制御部が第1制御部に格納されている第2作動部初期情報を第2制御部に送信し、第2制御部が、受信した第2作動部初期情報と第2作動部情報とを照合し、第1制御部と第2制御部との適合性を判定することを特徴とするので、たとえば、第1制御部と第2制御部とが最初に電気的に連結されて以降に第2制御部が交換されたとき、その交換された第2制御部が適切なものであるかどうかを判定することができる。
【0015】
これによって、交換された第2制御部が第2作動部の動作制御を開始する前に、第2制御部と第1制御部との適合性を判定することができるので、誤った形式の制御部と交換された場合であっても、第2作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。加えて、第2作動部情報だけを用いて、第1制御部と第2制御部との適合性を判定するので、簡単な構成で制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。
【0016】
請求項2に記載の発明によれば、第2制御部が第1制御部と第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えるので、農業機械の運転者に不適合であるとの判定を容易に報知することができる。
【0017】
請求項3に記載の発明によれば、第1制御部と第2制御部とが同一の通信タイプで作動するので、第1制御部と第2制御部との通信を容易に行うことができる。
【0018】
請求項4に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作を制御する第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、第1制御部と第2制御部とが最初に電気的に連結されたとき、または、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第2制御部は、第1制御部に対して、第1作動部の固有情報である第1作動部情報を第2制御部に送信するよう要求し、受信した第1作動部情報と第2制御部に格納されている第2作動部の固有情報である第2作動部情報とを照合して、第1制御部と第2制御部との適合性を判定するので、第1制御部または第2制御部が交換されたとき、その交換された第1制御部または第2制御部が適切なものであるかどうかを判定することができる。
【0019】
これによって、第1制御部または第2制御部を交換した後、その交換された第1制御部または第2制御部が第1作動部または第2作動部の動作制御を開始する前に、制御部と作動部との適合性を判定することができので、誤った制御部に交換された場合であっても、作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。
【0020】
請求項5に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、第1制御部と第2制御部とが伝送路を介して最初に電気的に連結されたときに、第2制御部が、第2作動部の固有情報としての第2作動部情報を第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第2制御部が、第1制御部に対して第2作動部初期情報を第2制御部に送信するよう要求する、初期情報送信要求ステップと、第1制御部が、第2作動部初期情報を第2制御部に送信する、初期情報送信ステップと、第2制御部が、第2作動部初期情報と第2制御部に記憶されている第2作動部情報とを照合し、第1制御部と第2制御部との適合性を判定する、適合性判定ステップとを備えるので、たとえば、第1制御部と第2制御部とが最初に電気的に連結されて以降に第2制御部が交換されたとき、その交換された第2制御部が適切なものであるかどうかを判定することができる。
【0021】
これによって、第2制御部を交換した後、その交換された第2制御部が第2作動部の動作制御を開始する前に、制御部と作動部との適合性を判定することができるので、誤った制御部に交換された場合であっても、第2作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定方法を提供することができる。加えて、第2作動部情報だけを用いて、第1制御部と第2制御部との適合性を判定するので、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定方法を提供することができる。
【0022】
請求項6に記載の発明によれば、適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えるので、農業機械の運転者に不適合であるとの判定を容易に報知することができる。
【0023】
請求項7に記載の発明によれば、第1制御部と第2制御部とが同一の通信タイプで作動するので、農業機械の適合性判定方法を提供することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施例に係るトラクタとロータリー耕耘機を示す側面図である。
【図2】本発明の一実施例の制御ブロック図である。
【図3】トラクタとロータリー耕耘機を初めて連結した際の制御フロー図である。
【図4】トラクタとロータリー耕耘機を2度目以降に連結した際の制御フロー図である。
【図5】本発明の別の例の制御ブロック図である。
【図6】本発明のさらに別の例の制御フロー図である。
【発明を実施するための形態】
【0025】
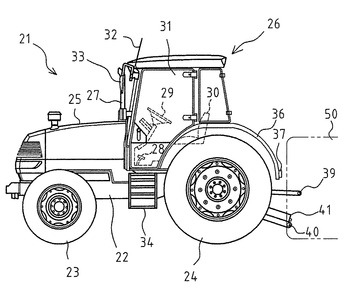
以下、図面を参照しつつ、この発明を実施するための最良の形態について詳述する。図1にこの発明の農業機械としてのトラクタ21とその後部に連結した作業機としてのロータリー耕耘機の側面図を示す。トラクタ21は、車体フレーム22の前後に前輪23および後輪24を2つずつ備え、前輪23の上方にボンネット25を形成し、その内側には原動機部としてのエンジンを備える。そして、ボンネット25の後部に連続して運転ボックス26を設ける。
【0026】
運転ボックス26内には、エンジンキー、アクセルペダル,クラッチペダル,ブレーキペダルなどの操作ペダル28、シフトレバー、ハンドル29、運転席30、さらに、速度、燃料、警報などを表示する表示部(不図示)などを設ける。運転ボックス26の外周はそれぞれフロントガラス、リアガラス、ドア31などが視認性を向上させるためにガラス張りにて構成されている。また、運転ボックス26の左前部にはラジオ放送などを受信するアンテナ32を取り付けるとともに、運転ボックス26の両前部には後方確認用のミラー33を設ける。
【0027】
運転ボックス26の前方のボンネット25上にはエンジンの排気を誘導するパイプ状の排気口27を鉛直方向に設ける。また、運転ボックス26の左下方には、運転者が運転ボックス26に昇降するためのステップ34を車体フレーム22に固定して取り付ける。
運転ボックス26の後部下方には、フェンダ36が後輪24の後側上半分付近まで覆うように設けられ、反射板37がフェンダ36の後端に取り付けられる。このフェンダ36は本体フレーム22に固設されている。
【0028】
さらに、トラクタ21の後部には、トップリンク39,左右一対のロワーリンク40およびPTO軸41を延設する。トップリンク39および左右一対のロワーリンク40の先端には、三点リンク式のオートヒッチを取り付けるようにしてもよい。
そして、トラクタ21にはロータリー耕耘機50をトップリンク39,ロワーリンク40を介して取り付け、PTO軸41をロータリー耕耘機50の入力軸に取り付ける。
【0029】
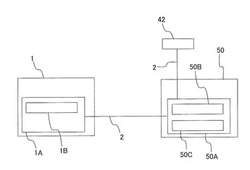
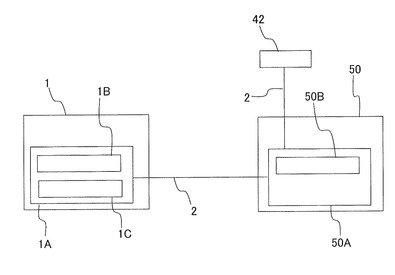
図2には、この例のトラクタ21とロータリー耕耘機50とが連結されたときの制御ブロック図を示す。エンジン(第1作動部)1は、その作動制御をするコントローラ(第1制御部)1Aを有する。コントローラ1Aには記憶部1Bを備え、ロータリー耕耘機51から最初に送られてくる形式データ(第2作動部情報)をロータリー耕耘機50の初期情報(第2作動部初期情報)として記憶する。ロータリー耕耘機50は、その作動制御をするコントローラ(第2制御部)50Aを有する。コントローラ50Aには記憶部50Bと判定部50Cとを備える。記憶部50Bには、ロータリー耕耘機50の形式データ(第2作動部情報)が記憶されている。また、判定部50Cは、後述するように、記憶部1Bに記憶されているロータリー耕耘機50の形式データ(第2作動部初期情報)と、ロータリー耕耘機50の形式データ(第2作動部情報)との適合性を判定する。また、コントローラ50Aは、ロータリー耕耘機50の作動を司るほか、後述するように、コントローラ1Aから送信されるロータリー耕耘機50の形式データと、記憶部50Bに格納しているロータリー耕耘機50の形式データとを照合して両者の適合性を判定したり、エンジン作動制限などを司ったりするものである。表示部42は、後述する適合性判定の結果、不一致と判定された場合にその旨を表示して、運転者に報知するものである。なお、コントローラ1A,50A、表示部42はバス(伝送路)2にて接続されている。また、これらのコントローラは同一の通信タイプとして、CANプロトコルによって通信を行うものである。
【0030】
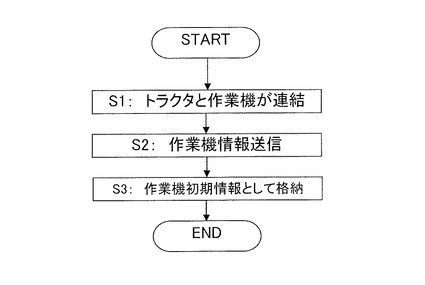
このように構成されたトラクタ21にロータリー耕耘機50を連結する方法について説明する。まず、図3を用いて、ロータリー耕耘機50が新品として工場で製造、出荷されて初めて、トラクタ21と連結するときの制御方法について説明する。出荷されたロータリー耕耘機50をトラクタ21と連結する(S1)。すると、コントローラ50Aの指示によって、記憶部50Bに格納されているロータリー耕耘機50の形式データ(第2作動部情報)をエンジン1側に送信する(S2)。バス2を介して送信されたロータリー耕耘機50の形式データは、記憶部1Bにロータリー耕耘機50の初期情報(第2作動部初期情報)として格納する(S3:初期情報記憶ステップ)。その後は、トラクタ21の運転手の操作によってロータリー耕耘機50を操作して農作業を行う。そして、農作業が終了したときは、必要に応じてロータリー耕耘機50をトラクタ21から切り離して保管する。
【0031】
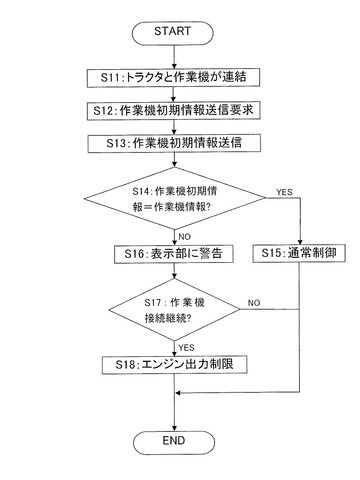
次に、ロータリー耕耘機50のコントローラ50Aを交換した後、トラクタ21がロータリー耕耘機50を再度取り付けて農作業をするときに行う、制御部適合性判定方法について説明する(図4)。まず、ロータリー耕耘機50をトラクタ21に連結する(S11)。すると、ロータリー耕耘機50の制御部50Aが、トラクタ21に備える制御部1Aにアクセスし、そこの記憶部1Bに格納されているロータリー耕耘機50の形式データ(第2作動部初期情報)を送信するよう要求する(S12:初期情報送信要求ステップ)。次に、ロータリー耕耘機50の初期情報がバス2を介してコントローラ50Aに送信される(S13:初期情報送信ステップ)。
【0032】
コントローラ50Aの判定部50Cは、記憶部50Bに格納されているロータリー耕耘機50の形式データ(第2作動部情報)と、記憶部1Bからすでに送信されているロータリー耕耘機50の形式データとを照合して適合性を判定する(S14:適合性判定ステップ)。両者が一致するときは、通常の制御を行う(S15)。一方、両者が異なるときは、運転ボックス26内に設けられた表示部42にその旨の警告を表示する(S16)。そして、コントローラ50Aは、ロータリー耕耘機50との接続が継続しているかを確認する(S17)。ロータリー耕耘機50がトラクタ21から切り離されたときは、フローを終了する。一方、ロータリー耕耘機50が引き続きトラクタ21に連結されているときは、コントローラ50Aがエンジン1のコントローラ1Aに指令を発して、エンジン1の出力を制限する(S18)。なお、ステップS18では、エンジン1を停止するように制御してもよいし、PTO軸41の回転を停止するなどして、ロータリー耕耘機50の作業機能を制限するようにしてもよい。
【0033】
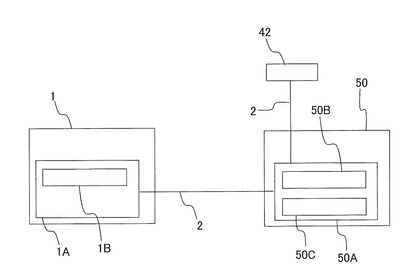
ところで、この発明の農業機械の制御部適合性判定システムは次のように構成してもよい。すなわち、図5に示すように、判定部をロータリー耕耘機50のコントローラ50Aに代えて、エンジン1のコントローラ1Aに備えるように構成してもよい(判定部1C)。このような場合の作業フローを次に説明する。まず、出荷されたロータリー耕耘機50をトラクタ21と連結する。すると、コントローラ1Aの指示によって、記憶部1Bに格納されているエンジン1の形式データをロータリー耕耘機50側に送信する。バス2を介して送信されたエンジン1の形式データは、記憶部50Bにエンジン1の初期情報として格納する。その後は、トラクタ21の運転手の操作によってロータリー耕耘機50を操作して農作業を行う。そして、農作業が終了したときは、必要に応じてロータリー耕耘機50をトラクタ21から切り離して保管する。
【0034】
次に、ロータリー耕耘機50のコントローラ50Aを交換した後、トラクタ21がロータリー耕耘機50を再度取り付けて農作業をするときに行う、制御部適合性判定方法について説明する。まず、ロータリー耕耘機50をトラクタ21に連結する。すると、トラクタ21に備える制御部1Aが、ロータリー耕耘機50の制御部50Aにアクセスし、そこの記憶部50Bに格納されているエンジン1の形式データ(初期情報)を送信するよう要求する。次に、エンジン1の初期情報がバス2を介してコントローラ1Aに送信される。
【0035】
コントローラ1Aに備える判定部1Cは、記憶部1Bに格納されているエンジン1の形式データと、記憶部50Bから送信されたエンジン1の形式データとを照合してコントローラ1Aとコントローラ50Aとの適合性を判定する。両者が一致するときは、通常の制御を行う。一方、両者が異なるときは、運転ボックス26内に設けられた表示部42にその旨の警告を表示する。次に、コントローラ1Aは、エンジン1とロータリー耕耘機50との接続が継続しているかを確認する。ロータリー耕耘機50がトラクタ21から切り離されたときは、フローを終了する。一方、ロータリー耕耘機50が引き続きトラクタ21に連結されているときは、コントローラ1Aがエンジン1の出力を制限する。
【0036】
この発明の農業機械の制御部適合性判定システムはさらに次のように構成してもよい。すなわち、エンジン1と、そのエンジン1の動作制御を行うコントローラ(第1制御部)1Aと、エンジン1の固有情報であるエンジン形式データ(第1作動部情報)を格納する記憶部1Bと、ロータリー耕耘機(第2作動部)50と、そのロータリー耕耘機50の動作を制御するコントローラ(第2制御部)50Aと、ロータリー耕耘機50の固有情報である作業機形式データ(第2作動部情報)を格納する記憶部50Bとを備える。そして、コントローラ1A、コントローラ50A、表示部42がバス(伝送路)2を介して電気的に連結される。また、これらのコントローラは同一の通信タイプとして、CANプロトコルによって通信を行うものである。
【0037】
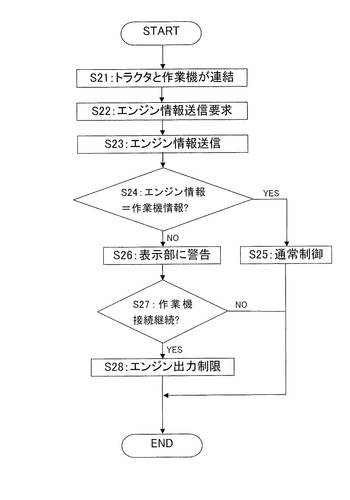
このような構成の農業機械の制御部適合性判定システムでは、図6に示すように、トラクタ21とロータリー耕耘機50とが連結すると(S21)、コントローラ50Aが記憶部1Bに記憶されている、エンジン形式データをコントローラ50Aに送信するよう要求する(S22)。すると、コントローラ1Aがエンジン形式データをコントローラ50Aに送信する(S23)。そして、コントローラ50Aの判定部50Cは、エンジン形式データと記憶部50Bに記憶されている作業機形式データとを照合して判定する(S24)。両者が適合するときは、通常の制御を行う(S25)。一方、両者が適合しないときは運転ボックス26内に設けられた表示部42にその旨の警告を表示する(S26)。なお、適合性の判定の際には、事前に不図示の記憶部に記憶された適合性判定リストに基づいて行うものとする。適合性判定リストには、ロータリー耕耘機50の形式データに適合しうる1または複数のエンジン形式データが掲載されており、コントローラ50Aは、記憶部1Cより送信されてきたエンジン形式データがこの適合性判定リストのなかに形成されたエンジン形式データであるかを判定するものである。
【0038】
そして、ロータリー耕耘機50の操作が継続しているかを判定する(S27)。ロータリー耕耘機50の操作が停止したときは、フローを終了する。一方、ロータリー耕耘機50の操作が継続しているときは、コントローラ50Aはエンジン1のコントローラ1Aに指令を発して、エンジン1の出力を制限する(S28)。
【0039】
なお、この発明は、次のような場合にも効果的である。すなわち、後部に作業機などを連結する農業機械、たとえばトラクタでは別の問題があった。すなわち、作業機はトラクタのエンジン駆動の一部を用いて作動されるものであり、作業機の動作条件は連結するトラクタのエンジン出力と関係している。したがって、トラクタのエンジン能力を超える出力を必要とする作業機を連結するとエンジンに過度の負担がかかり、エンジンの故障や破損を招いてしまう恐れがあった。したがって、トラクタが作業機を接続する際に、両者が適切な組み合わせであるか否かを判定できることが重要となり、この発明はこのような判定に適用することもできる。
【0040】
なお、この発明はCANによる実施形態に限定されるものではなく、あらゆる通信プロトコルを用いたLANにも適用しうる。また、この発明の作動部は、トラクタに備えるエンジンと、それに連結するロータリー耕耘機に限定されるものではない。たとえば、トラクタに備えるエンジンと、バケットなどのフロントローダに適用してもよい。また、作動部の数は2つに限定されるものでもなく、たとえば、コンバインに備えるエンジンと、脱穀装置及び刈取前処理装置と、刈取部用油圧シリンダと、走行部用油圧シリンダと、排出オーガの駆動モータ及びオーガ用油圧シリンダとの5つによって構成されてもよい。
【産業上の利用可能性】
【0041】
また、この発明の農作業機は、エンジンを有するあらゆる農業機械、たとえば、田植機、トラクタ、コンバインなどに適用することができる。
【符号の説明】
【0042】
1 エンジン(第1作動部)
1A コントローラ(第1制御部)
1B,50B 記憶部
1C,50C 判定部
2 バス(伝送路)
21 トラクタ(農業機械)
22 車体フレーム
23 前輪
24 後輪
25 ボンネット
26 運転ボックス
27 排気口
28 操作ペダル
29 ハンドル
30 運転席
31 ドア
32 アンテナ
33 ミラー
34 ステップ
36 フェンダ
37 反射板
39 トップリンク
40 ロワーリンク
41 PTO軸
42 表示部
50 ロータリー耕耘機(第2作動部)
50A コントローラ(第2制御部)
【技術分野】
【0001】
本発明は、エンジンなどの第1作動部と、その第1作動部の動作制御を行う第1制御部と、作業機などの第2作動部と、その第2作動部の動作制御を行う第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムおよび農業機械の制御部適合性判定方法に関する。
【背景技術】
【0002】
近年、CAN(Controller Area Network)の技術の普及にともなって、農業機械分野への適用も提案されてきた。たとえば、農業機械に備える各種の作動部の制御システムに適用されている。このうち特許文献1では、エンジン(第1作動部)と、脱穀装置(第2作動部)などを備えたコンバインに適用した技術が開示されている。この例では、エンジンと脱穀装置とはそれぞれ別のコントローラ(第1および第2制御部)によって制御されており、2つのコントローラがCANを用いてバス(通信路)によって接続されている。
【0003】
このコンバインでは、CANによって複数のコントローラの間を同一の通信プロトコルで通信するので、各コントローラ間の制御データのやりとりが円滑で、かつ、通信エラーの検出やエラー処理もスムーズに行うことができるという利点を有する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−59779号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
CANを農業機械の分野に適用したこの技術では、コンバインが作動中のときに、コンバインに備える各種の作動部の動作を監視、制御するものであった。一方、農業機械の各作動部を制御するコントローラが老朽化や破損して新しいコントローラに交換されるようなとき、誤って、作動部の規格に適合しないコントローラが取付けられてしまう場合がある。たとえば、トラクタの後部に連結する作業機(作動部)の場合、誤って作業機の出力規格を超える能力を要求するようなコントローラが取付けられてしまうと、作業機の動力源であるトラクタのエンジンに大きな負担がかかり、エンジン本体が破損しかねない。このようなコントローラの取り付けミスに対しては、これを防止するような仕組みが必要とされてきた。
【0006】
そこで、この発明の目的は、制御部の動作規格を容易かつ適切に適合判定できる農業機械の制御部適合性判定システムおよび、農業機械の適合性判定方法を提供することにある。
【課題を解決するための手段】
【0007】
このため請求項1に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたときに、
前記第2制御部が、該第2制御部に格納する前記第2作動部の固有情報である第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第1制御部が該第1制御部に格納されている前記第2作動部初期情報を前記第2制御部に送信し、該第2制御部が、受信した前記第2作動部初期情報と前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載の農業機械の制御部適合性判定システムにおいて、前記第2制御部が前記第1制御部と前記第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えることを特徴とする。
【0009】
請求項3に記載の発明は、請求項1に記載の農業機械の制御部適合性判定システムにおいて、前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする。
【0010】
請求項4に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作を制御する第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたとき、または、前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、
前記第2制御部は、前記第1制御部に対して、前記第1作動部の固有情報である前記第1作動部情報を前記第2制御部に送信するよう要求し、受信した前記第1作動部情報と前記第2制御部に格納されている前記第2作動部の固有情報である第2作動部情報とを照合して、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする。
【0011】
請求項5に記載の発明は、第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、
前記第1制御部と前記第2制御部とが伝送路を介して最初に電気的に連結されたときに、前記第2制御部が、前記第2作動部の固有情報としての第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第2制御部が、前記第1制御部に対して前記第2作動部初期情報を前記第2制御部に送信するよう要求する、初期情報送信要求ステップと、
前記第1制御部が、前記第2作動部初期情報を前記第2制御部に送信する、初期情報送信ステップと、
前記第2制御部が、前記第2作動部初期情報と前記第2制御部に記憶されている前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定する、適合性判定ステップとを備えることを特徴とする。
【0012】
請求項6に記載の発明は、請求項5に記載の農業機械の制御部適合性判定方法において、前記適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えることを特徴とする。
【0013】
請求項7に記載の発明は、請求項5に記載の農業機械の制御部適合性判定方法において、前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする。
【発明の効果】
【0014】
請求項1に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作制御を行う第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、第1制御部と第2制御部とが最初に電気的に連結されたときに、第2制御部が、第2制御部に格納する第2作動部の固有情報である第2作動部情報を第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第1制御部が第1制御部に格納されている第2作動部初期情報を第2制御部に送信し、第2制御部が、受信した第2作動部初期情報と第2作動部情報とを照合し、第1制御部と第2制御部との適合性を判定することを特徴とするので、たとえば、第1制御部と第2制御部とが最初に電気的に連結されて以降に第2制御部が交換されたとき、その交換された第2制御部が適切なものであるかどうかを判定することができる。
【0015】
これによって、交換された第2制御部が第2作動部の動作制御を開始する前に、第2制御部と第1制御部との適合性を判定することができるので、誤った形式の制御部と交換された場合であっても、第2作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。加えて、第2作動部情報だけを用いて、第1制御部と第2制御部との適合性を判定するので、簡単な構成で制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。
【0016】
請求項2に記載の発明によれば、第2制御部が第1制御部と第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えるので、農業機械の運転者に不適合であるとの判定を容易に報知することができる。
【0017】
請求項3に記載の発明によれば、第1制御部と第2制御部とが同一の通信タイプで作動するので、第1制御部と第2制御部との通信を容易に行うことができる。
【0018】
請求項4に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作を制御する第2制御部と、第1制御部と第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、第1制御部と第2制御部とが最初に電気的に連結されたとき、または、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第2制御部は、第1制御部に対して、第1作動部の固有情報である第1作動部情報を第2制御部に送信するよう要求し、受信した第1作動部情報と第2制御部に格納されている第2作動部の固有情報である第2作動部情報とを照合して、第1制御部と第2制御部との適合性を判定するので、第1制御部または第2制御部が交換されたとき、その交換された第1制御部または第2制御部が適切なものであるかどうかを判定することができる。
【0019】
これによって、第1制御部または第2制御部を交換した後、その交換された第1制御部または第2制御部が第1作動部または第2作動部の動作制御を開始する前に、制御部と作動部との適合性を判定することができので、誤った制御部に交換された場合であっても、作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムを提供することができる。
【0020】
請求項5に記載の発明によれば、第1作動部と、第1作動部の動作制御を行う第1制御部と、第2作動部と、第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、第1制御部と第2制御部とが伝送路を介して最初に電気的に連結されたときに、第2制御部が、第2作動部の固有情報としての第2作動部情報を第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、第1制御部と第2制御部とが電気的に切断された後、再び、第1制御部と第2制御部とが電気的に連結されたときに、第2制御部が、第1制御部に対して第2作動部初期情報を第2制御部に送信するよう要求する、初期情報送信要求ステップと、第1制御部が、第2作動部初期情報を第2制御部に送信する、初期情報送信ステップと、第2制御部が、第2作動部初期情報と第2制御部に記憶されている第2作動部情報とを照合し、第1制御部と第2制御部との適合性を判定する、適合性判定ステップとを備えるので、たとえば、第1制御部と第2制御部とが最初に電気的に連結されて以降に第2制御部が交換されたとき、その交換された第2制御部が適切なものであるかどうかを判定することができる。
【0021】
これによって、第2制御部を交換した後、その交換された第2制御部が第2作動部の動作制御を開始する前に、制御部と作動部との適合性を判定することができるので、誤った制御部に交換された場合であっても、第2作動部の作動前に発見することができる。このようにして、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定方法を提供することができる。加えて、第2作動部情報だけを用いて、第1制御部と第2制御部との適合性を判定するので、制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定方法を提供することができる。
【0022】
請求項6に記載の発明によれば、適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えるので、農業機械の運転者に不適合であるとの判定を容易に報知することができる。
【0023】
請求項7に記載の発明によれば、第1制御部と第2制御部とが同一の通信タイプで作動するので、農業機械の適合性判定方法を提供することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施例に係るトラクタとロータリー耕耘機を示す側面図である。
【図2】本発明の一実施例の制御ブロック図である。
【図3】トラクタとロータリー耕耘機を初めて連結した際の制御フロー図である。
【図4】トラクタとロータリー耕耘機を2度目以降に連結した際の制御フロー図である。
【図5】本発明の別の例の制御ブロック図である。
【図6】本発明のさらに別の例の制御フロー図である。
【発明を実施するための形態】
【0025】
以下、図面を参照しつつ、この発明を実施するための最良の形態について詳述する。図1にこの発明の農業機械としてのトラクタ21とその後部に連結した作業機としてのロータリー耕耘機の側面図を示す。トラクタ21は、車体フレーム22の前後に前輪23および後輪24を2つずつ備え、前輪23の上方にボンネット25を形成し、その内側には原動機部としてのエンジンを備える。そして、ボンネット25の後部に連続して運転ボックス26を設ける。
【0026】
運転ボックス26内には、エンジンキー、アクセルペダル,クラッチペダル,ブレーキペダルなどの操作ペダル28、シフトレバー、ハンドル29、運転席30、さらに、速度、燃料、警報などを表示する表示部(不図示)などを設ける。運転ボックス26の外周はそれぞれフロントガラス、リアガラス、ドア31などが視認性を向上させるためにガラス張りにて構成されている。また、運転ボックス26の左前部にはラジオ放送などを受信するアンテナ32を取り付けるとともに、運転ボックス26の両前部には後方確認用のミラー33を設ける。
【0027】
運転ボックス26の前方のボンネット25上にはエンジンの排気を誘導するパイプ状の排気口27を鉛直方向に設ける。また、運転ボックス26の左下方には、運転者が運転ボックス26に昇降するためのステップ34を車体フレーム22に固定して取り付ける。
運転ボックス26の後部下方には、フェンダ36が後輪24の後側上半分付近まで覆うように設けられ、反射板37がフェンダ36の後端に取り付けられる。このフェンダ36は本体フレーム22に固設されている。
【0028】
さらに、トラクタ21の後部には、トップリンク39,左右一対のロワーリンク40およびPTO軸41を延設する。トップリンク39および左右一対のロワーリンク40の先端には、三点リンク式のオートヒッチを取り付けるようにしてもよい。
そして、トラクタ21にはロータリー耕耘機50をトップリンク39,ロワーリンク40を介して取り付け、PTO軸41をロータリー耕耘機50の入力軸に取り付ける。
【0029】
図2には、この例のトラクタ21とロータリー耕耘機50とが連結されたときの制御ブロック図を示す。エンジン(第1作動部)1は、その作動制御をするコントローラ(第1制御部)1Aを有する。コントローラ1Aには記憶部1Bを備え、ロータリー耕耘機51から最初に送られてくる形式データ(第2作動部情報)をロータリー耕耘機50の初期情報(第2作動部初期情報)として記憶する。ロータリー耕耘機50は、その作動制御をするコントローラ(第2制御部)50Aを有する。コントローラ50Aには記憶部50Bと判定部50Cとを備える。記憶部50Bには、ロータリー耕耘機50の形式データ(第2作動部情報)が記憶されている。また、判定部50Cは、後述するように、記憶部1Bに記憶されているロータリー耕耘機50の形式データ(第2作動部初期情報)と、ロータリー耕耘機50の形式データ(第2作動部情報)との適合性を判定する。また、コントローラ50Aは、ロータリー耕耘機50の作動を司るほか、後述するように、コントローラ1Aから送信されるロータリー耕耘機50の形式データと、記憶部50Bに格納しているロータリー耕耘機50の形式データとを照合して両者の適合性を判定したり、エンジン作動制限などを司ったりするものである。表示部42は、後述する適合性判定の結果、不一致と判定された場合にその旨を表示して、運転者に報知するものである。なお、コントローラ1A,50A、表示部42はバス(伝送路)2にて接続されている。また、これらのコントローラは同一の通信タイプとして、CANプロトコルによって通信を行うものである。
【0030】
このように構成されたトラクタ21にロータリー耕耘機50を連結する方法について説明する。まず、図3を用いて、ロータリー耕耘機50が新品として工場で製造、出荷されて初めて、トラクタ21と連結するときの制御方法について説明する。出荷されたロータリー耕耘機50をトラクタ21と連結する(S1)。すると、コントローラ50Aの指示によって、記憶部50Bに格納されているロータリー耕耘機50の形式データ(第2作動部情報)をエンジン1側に送信する(S2)。バス2を介して送信されたロータリー耕耘機50の形式データは、記憶部1Bにロータリー耕耘機50の初期情報(第2作動部初期情報)として格納する(S3:初期情報記憶ステップ)。その後は、トラクタ21の運転手の操作によってロータリー耕耘機50を操作して農作業を行う。そして、農作業が終了したときは、必要に応じてロータリー耕耘機50をトラクタ21から切り離して保管する。
【0031】
次に、ロータリー耕耘機50のコントローラ50Aを交換した後、トラクタ21がロータリー耕耘機50を再度取り付けて農作業をするときに行う、制御部適合性判定方法について説明する(図4)。まず、ロータリー耕耘機50をトラクタ21に連結する(S11)。すると、ロータリー耕耘機50の制御部50Aが、トラクタ21に備える制御部1Aにアクセスし、そこの記憶部1Bに格納されているロータリー耕耘機50の形式データ(第2作動部初期情報)を送信するよう要求する(S12:初期情報送信要求ステップ)。次に、ロータリー耕耘機50の初期情報がバス2を介してコントローラ50Aに送信される(S13:初期情報送信ステップ)。
【0032】
コントローラ50Aの判定部50Cは、記憶部50Bに格納されているロータリー耕耘機50の形式データ(第2作動部情報)と、記憶部1Bからすでに送信されているロータリー耕耘機50の形式データとを照合して適合性を判定する(S14:適合性判定ステップ)。両者が一致するときは、通常の制御を行う(S15)。一方、両者が異なるときは、運転ボックス26内に設けられた表示部42にその旨の警告を表示する(S16)。そして、コントローラ50Aは、ロータリー耕耘機50との接続が継続しているかを確認する(S17)。ロータリー耕耘機50がトラクタ21から切り離されたときは、フローを終了する。一方、ロータリー耕耘機50が引き続きトラクタ21に連結されているときは、コントローラ50Aがエンジン1のコントローラ1Aに指令を発して、エンジン1の出力を制限する(S18)。なお、ステップS18では、エンジン1を停止するように制御してもよいし、PTO軸41の回転を停止するなどして、ロータリー耕耘機50の作業機能を制限するようにしてもよい。
【0033】
ところで、この発明の農業機械の制御部適合性判定システムは次のように構成してもよい。すなわち、図5に示すように、判定部をロータリー耕耘機50のコントローラ50Aに代えて、エンジン1のコントローラ1Aに備えるように構成してもよい(判定部1C)。このような場合の作業フローを次に説明する。まず、出荷されたロータリー耕耘機50をトラクタ21と連結する。すると、コントローラ1Aの指示によって、記憶部1Bに格納されているエンジン1の形式データをロータリー耕耘機50側に送信する。バス2を介して送信されたエンジン1の形式データは、記憶部50Bにエンジン1の初期情報として格納する。その後は、トラクタ21の運転手の操作によってロータリー耕耘機50を操作して農作業を行う。そして、農作業が終了したときは、必要に応じてロータリー耕耘機50をトラクタ21から切り離して保管する。
【0034】
次に、ロータリー耕耘機50のコントローラ50Aを交換した後、トラクタ21がロータリー耕耘機50を再度取り付けて農作業をするときに行う、制御部適合性判定方法について説明する。まず、ロータリー耕耘機50をトラクタ21に連結する。すると、トラクタ21に備える制御部1Aが、ロータリー耕耘機50の制御部50Aにアクセスし、そこの記憶部50Bに格納されているエンジン1の形式データ(初期情報)を送信するよう要求する。次に、エンジン1の初期情報がバス2を介してコントローラ1Aに送信される。
【0035】
コントローラ1Aに備える判定部1Cは、記憶部1Bに格納されているエンジン1の形式データと、記憶部50Bから送信されたエンジン1の形式データとを照合してコントローラ1Aとコントローラ50Aとの適合性を判定する。両者が一致するときは、通常の制御を行う。一方、両者が異なるときは、運転ボックス26内に設けられた表示部42にその旨の警告を表示する。次に、コントローラ1Aは、エンジン1とロータリー耕耘機50との接続が継続しているかを確認する。ロータリー耕耘機50がトラクタ21から切り離されたときは、フローを終了する。一方、ロータリー耕耘機50が引き続きトラクタ21に連結されているときは、コントローラ1Aがエンジン1の出力を制限する。
【0036】
この発明の農業機械の制御部適合性判定システムはさらに次のように構成してもよい。すなわち、エンジン1と、そのエンジン1の動作制御を行うコントローラ(第1制御部)1Aと、エンジン1の固有情報であるエンジン形式データ(第1作動部情報)を格納する記憶部1Bと、ロータリー耕耘機(第2作動部)50と、そのロータリー耕耘機50の動作を制御するコントローラ(第2制御部)50Aと、ロータリー耕耘機50の固有情報である作業機形式データ(第2作動部情報)を格納する記憶部50Bとを備える。そして、コントローラ1A、コントローラ50A、表示部42がバス(伝送路)2を介して電気的に連結される。また、これらのコントローラは同一の通信タイプとして、CANプロトコルによって通信を行うものである。
【0037】
このような構成の農業機械の制御部適合性判定システムでは、図6に示すように、トラクタ21とロータリー耕耘機50とが連結すると(S21)、コントローラ50Aが記憶部1Bに記憶されている、エンジン形式データをコントローラ50Aに送信するよう要求する(S22)。すると、コントローラ1Aがエンジン形式データをコントローラ50Aに送信する(S23)。そして、コントローラ50Aの判定部50Cは、エンジン形式データと記憶部50Bに記憶されている作業機形式データとを照合して判定する(S24)。両者が適合するときは、通常の制御を行う(S25)。一方、両者が適合しないときは運転ボックス26内に設けられた表示部42にその旨の警告を表示する(S26)。なお、適合性の判定の際には、事前に不図示の記憶部に記憶された適合性判定リストに基づいて行うものとする。適合性判定リストには、ロータリー耕耘機50の形式データに適合しうる1または複数のエンジン形式データが掲載されており、コントローラ50Aは、記憶部1Cより送信されてきたエンジン形式データがこの適合性判定リストのなかに形成されたエンジン形式データであるかを判定するものである。
【0038】
そして、ロータリー耕耘機50の操作が継続しているかを判定する(S27)。ロータリー耕耘機50の操作が停止したときは、フローを終了する。一方、ロータリー耕耘機50の操作が継続しているときは、コントローラ50Aはエンジン1のコントローラ1Aに指令を発して、エンジン1の出力を制限する(S28)。
【0039】
なお、この発明は、次のような場合にも効果的である。すなわち、後部に作業機などを連結する農業機械、たとえばトラクタでは別の問題があった。すなわち、作業機はトラクタのエンジン駆動の一部を用いて作動されるものであり、作業機の動作条件は連結するトラクタのエンジン出力と関係している。したがって、トラクタのエンジン能力を超える出力を必要とする作業機を連結するとエンジンに過度の負担がかかり、エンジンの故障や破損を招いてしまう恐れがあった。したがって、トラクタが作業機を接続する際に、両者が適切な組み合わせであるか否かを判定できることが重要となり、この発明はこのような判定に適用することもできる。
【0040】
なお、この発明はCANによる実施形態に限定されるものではなく、あらゆる通信プロトコルを用いたLANにも適用しうる。また、この発明の作動部は、トラクタに備えるエンジンと、それに連結するロータリー耕耘機に限定されるものではない。たとえば、トラクタに備えるエンジンと、バケットなどのフロントローダに適用してもよい。また、作動部の数は2つに限定されるものでもなく、たとえば、コンバインに備えるエンジンと、脱穀装置及び刈取前処理装置と、刈取部用油圧シリンダと、走行部用油圧シリンダと、排出オーガの駆動モータ及びオーガ用油圧シリンダとの5つによって構成されてもよい。
【産業上の利用可能性】
【0041】
また、この発明の農作業機は、エンジンを有するあらゆる農業機械、たとえば、田植機、トラクタ、コンバインなどに適用することができる。
【符号の説明】
【0042】
1 エンジン(第1作動部)
1A コントローラ(第1制御部)
1B,50B 記憶部
1C,50C 判定部
2 バス(伝送路)
21 トラクタ(農業機械)
22 車体フレーム
23 前輪
24 後輪
25 ボンネット
26 運転ボックス
27 排気口
28 操作ペダル
29 ハンドル
30 運転席
31 ドア
32 アンテナ
33 ミラー
34 ステップ
36 フェンダ
37 反射板
39 トップリンク
40 ロワーリンク
41 PTO軸
42 表示部
50 ロータリー耕耘機(第2作動部)
50A コントローラ(第2制御部)
【特許請求の範囲】
【請求項1】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたときに、
前記第2制御部が、該第2制御部に格納する前記第2作動部の固有情報である第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第1制御部が該第1制御部に格納されている前記第2作動部初期情報を前記第2制御部に送信し、該第2制御部が、受信した前記第2作動部初期情報と前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする、農業機械の制御部適合性判定システム。
【請求項2】
前記第2制御部が前記第1制御部と前記第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えることを特徴とする、請求項1に記載の農業機械の制御部適合性判定システム。
【請求項3】
前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする、請求項1に記載の農業機械の制御部適合性判定システム。
【請求項4】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作を制御する第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたとき、または、前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、
前記第2制御部は、前記第1制御部に対して、前記第1作動部の固有情報である前記第1作動部情報を前記第2制御部に送信するよう要求し、受信した前記第1作動部情報と前記第2制御部に格納されている前記第2作動部の固有情報である第2作動部情報とを照合して、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする、農業機械の制御部適合性判定システム。
【請求項5】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、
前記第1制御部と前記第2制御部とが伝送路を介して最初に電気的に連結されたときに、前記第2制御部が、前記第2作動部の固有情報としての第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第2制御部が、前記第1制御部に対して前記第2作動部初期情報を前記第2制御部に送信するよう要求する、初期情報送信要求ステップと、
前記第1制御部が、前記第2作動部初期情報を前記第2制御部に送信する、初期情報送信ステップと、
前記第2制御部が、前記第2作動部初期情報と前記第2制御部に記憶されている前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定する、適合性判定ステップとを備えることを特徴とする、農業機械の制御部適合性判定方法。
【請求項6】
前記適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えることを特徴とする、請求項5に記載の農業機械の制御部適合性判定方法。
【請求項7】
前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする、請求項5に記載の農業機械の制御部適合性判定方法。
【請求項1】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたときに、
前記第2制御部が、該第2制御部に格納する前記第2作動部の固有情報である第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する農業機械の制御部適合性判定システムであって、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第1制御部が該第1制御部に格納されている前記第2作動部初期情報を前記第2制御部に送信し、該第2制御部が、受信した前記第2作動部初期情報と前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする、農業機械の制御部適合性判定システム。
【請求項2】
前記第2制御部が前記第1制御部と前記第2制御部との適合性を判定し、不適合であると判定されたときにその旨を表示する表示部を備えることを特徴とする、請求項1に記載の農業機械の制御部適合性判定システム。
【請求項3】
前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする、請求項1に記載の農業機械の制御部適合性判定システム。
【請求項4】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作を制御する第2制御部と、前記第1制御部と前記第2制御部とを電気的に連結する伝送路とを備える農業機械の制御部適合性判定システムにおいて、
前記第1制御部と前記第2制御部とが最初に電気的に連結されたとき、または、前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、
前記第2制御部は、前記第1制御部に対して、前記第1作動部の固有情報である前記第1作動部情報を前記第2制御部に送信するよう要求し、受信した前記第1作動部情報と前記第2制御部に格納されている前記第2作動部の固有情報である第2作動部情報とを照合して、前記第1制御部と前記第2制御部との適合性を判定することを特徴とする、農業機械の制御部適合性判定システム。
【請求項5】
第1作動部と、該第1作動部の動作制御を行う第1制御部と、第2作動部と、該第2作動部の動作制御を行う第2制御部とを備える、農業機械の制御部適合性判定方法であって、
前記第1制御部と前記第2制御部とが伝送路を介して最初に電気的に連結されたときに、前記第2制御部が、前記第2作動部の固有情報としての第2作動部情報を前記第1制御部に送信して第2作動部初期情報として記憶する、初期情報記憶ステップと、
前記第1制御部と前記第2制御部とが電気的に切断された後、再び、前記第1制御部と前記第2制御部とが電気的に連結されたときに、前記第2制御部が、前記第1制御部に対して前記第2作動部初期情報を前記第2制御部に送信するよう要求する、初期情報送信要求ステップと、
前記第1制御部が、前記第2作動部初期情報を前記第2制御部に送信する、初期情報送信ステップと、
前記第2制御部が、前記第2作動部初期情報と前記第2制御部に記憶されている前記第2作動部情報とを照合し、前記第1制御部と前記第2制御部との適合性を判定する、適合性判定ステップとを備えることを特徴とする、農業機械の制御部適合性判定方法。
【請求項6】
前記適合性判定ステップにて不適合であると判定されたときに、その旨を表示部に表示する、表示ステップを備えることを特徴とする、請求項5に記載の農業機械の制御部適合性判定方法。
【請求項7】
前記第1制御部と前記第2制御部とが同一の通信タイプで作動することを特徴とする、請求項5に記載の農業機械の制御部適合性判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−102(P2011−102A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2009−148097(P2009−148097)
【出願日】平成21年6月22日(2009.6.22)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成21年6月22日(2009.6.22)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]