
農業管理ロボット
【課題】田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が出来る農業管理ロボット。
【解決手段】機体は、機体中央部の駆動用エンジン12を具備した構造で、車軸10と車輪9は着脱可能な除草をかねた前後左右車輪18、24,25,26で構成され、機体に搭載された駆動用エンジン12の出力を駆動用車軸10に出力供給し、前後車輪を回転する。機体側面と前後部に具備されている接触圧センサー18により稲株位置を感知し、エンジン12の車軸10への出力供給を、機体上部に搭載されているコンピュウタ19で車輪の、正転、逆転、停止、回転数変換を制御して、条間に沿って自動走行しながら土壌撹拌と除草作業をする。またスイッチの切り替えにより人が農業管理ロボットに具備されているカメラ7の映像を、遠隔操縦装置で映像を確認しながら遠隔操作ができる構成である。
【解決手段】機体は、機体中央部の駆動用エンジン12を具備した構造で、車軸10と車輪9は着脱可能な除草をかねた前後左右車輪18、24,25,26で構成され、機体に搭載された駆動用エンジン12の出力を駆動用車軸10に出力供給し、前後車輪を回転する。機体側面と前後部に具備されている接触圧センサー18により稲株位置を感知し、エンジン12の車軸10への出力供給を、機体上部に搭載されているコンピュウタ19で車輪の、正転、逆転、停止、回転数変換を制御して、条間に沿って自動走行しながら土壌撹拌と除草作業をする。またスイッチの切り替えにより人が農業管理ロボットに具備されているカメラ7の映像を、遠隔操縦装置で映像を確認しながら遠隔操作ができる構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、田植え直後から初期除草および中耕除草が出来る農業管理ロボットに関する。
【背景技術】
【0002】
従来の水田除草機は、昔からの手押し型タイプ(特許文献1)とそれを動力型仕様(特許文献2)に改めたものがあり、また歩行用動力型では撹拌ローターを並列に進行方向横軸に複数配置した横軸芯回り回転方式があり、また前記とほぼ同じ除草作業構造のものを乗用型走行仕様(特許文献3)に改めたものがあり、更に前記の構造のものに株間除草を加えた補助ローターとして縦軸回転による撹拌構造を組み合わせたもの(特許文献4)、などが知られている。
【特許文献1】特開平08−140408
【特許文献2】特開2002−360006
【特許文献3】特開2002−045003
【特許文献4】特開2001−103802
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の除草機では、農薬の一つである除草剤と化学肥料を使用した稲の普通栽培圃場で、栽培期間中に除草機を1ないし2回使用する中耕除草効果のほかに、相乗効果として根の酸素供給または断根することにより分けつを促進し、稲株の健全化により増収することが水田除草機の役割であった。
【0004】
除草剤と化学肥料等を無使用で持続栽培することが前提条件であるため普通栽培圃場法では、数日後には再び繁茂を繰り返し水田除草機による除草効果は不充分で特に栽培面積を限られた。
【0005】
前記有機米制度に基づく有機米栽培は、無農薬無化学肥料のため労力を非常に必要とし、特に除草作業は過酷で重労働であり経営規模拡大には限度がある。
【0006】
水田除草機を利用する除草期間は、田植え後2週間後くらいから葉が繁茂し田面を軽く覆いする時期までであり地域差があるにしても、その期間は3週間から7週間前後である。
【0007】
前記有機米制度から、除草剤を使用しない栽培は稲栽培期間中ほぼ1週間に1回前後のサイクルで、水田除草機を3〜5回前後利用しなければならなく、除草回数の頻度が非常に高まることになる。従って前記手押し型タイプは、重労働で能率が上がらなく小面積しかできないこと。また代掻き間もない田植え直後は、まだ表面土壌の沈殿硬化が進んでいないため、初期除草した場合走行中に除草機による押し土の影響で周辺稲株を埋没や横倒し現象を起こす。
【0008】
また、前記歩行用動力型は、人の運転の力で、機体とともに泥濘の水田土壌を長時間且つ長距離歩行しなければならなく、また圃場枕地の方向転換の時に機体の持ち上げ移動作業が大変重い等ことから非常に過酷な重労働が要求される。そして除草ローターの回転によって発生する土圧水圧の影響で、田植え直後の小さく活着が完全でない稲株を横倒しや埋没してしまう問題をかかえる。
【0009】
前記乗用型走行仕様は高価で機体重量も重く、作業時に稲の条間を走行することで幅の狭い車輪が要求されるため、水田補場の路盤破壊が生じ、再度の走行を試みるとハンドル操作が不能になり直進性を失うと同時に、車輪付着土の持ち上がり落下の影響で、周辺稲株を横倒しや埋没してしまう、また旋回時に車輪が稲株を踏み付けて欠株の発生が多くなり、減収する。
【0010】
本発明は田植え初期から適切に繰り返し遠隔操作や自動運転で除草作業が出来る農業管理ロボットを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は上記の目的を請求項1〜5により達成する。
【発明の効果】
【0012】
請求項1記載の発明によれば、左右前車輪と左右後車輪それぞれ内向きに回転させることにより、前車輪では、前方の推力と外向きの推力、後車輪では、前方の推力と内向きの推力が働いて、前方走行しながら外向き内向きの推力で土壌を撹拌することが可能で、稲株の条間に沿って旋回せずに前後左右移動が可能で、土壌をより細かく撹拌でき雑草を土と完全に分離することが可能で、除草精度を一段と高め農薬の除草剤を減らせることが可能である。
【0013】
請求項2記載による発明によれば、機体移動方向は前後左右移動が可能で、旋回時には希望旋回方向(右または左)に、そのままの姿勢で移動が可能で、次の条間への移動が非常に簡単に出来ることを特徴とし、走行しながら土壌の攪拌、除草作業をする構造であり、除草車輪部の撹拌未処理部分を少なくする効果があり、除草精度を一段と高め農薬の除草剤を減らせることが可能である。
【0014】
請求項3記載による発明によれば、機体を並列に多連結することが出来、水田の大きさや栽培面積に応じて複数の機体を連結することが出来、小規模経営から大規模経営の有機栽培経営が可能である。
【0015】
請求項4記載による発明によれば、水田の土壌が軟質土質や硬質土質に応じて車輪が交換できる構造であり、軟質土壌から硬質土壌まで幅広い土壌状態に対応が可能で、雑草の種類や大きさに応じて車輪を交換することが可能である。
【0016】
請求項5記載による発明によれば、マイクロコンピュウタの制御または遠隔操縦により従来の除草機の操作運転の過酷な重労働から解放され、有機栽培の難問であった同一圃場での除草期間中の繰り返し除草作業が可能となった。また、農業管理ロボットの除草作業中は、他の作業が可能であり作業効率を一段と高め、経営規模拡大も可能である。
【発明を実施するための最良の形態】
【0017】
本発明の農業管理ロボットは、機体に小型エンジン12を搭載し、小型エンジンのの出力供給を受けて回転する車輪の撹拌爪が、車軸にたいして(45度仕様もしくは135度仕様)±0〜6度の傾きで装備して構成する農業管理ロボットであって、前後左右移動が可能で走行しながら土壌を撹拌し除草作業ができることを特徴とする農業管理ロボットである。
【0018】
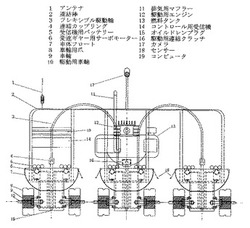
前記農業管理ロボットは、図1に示すように、機体中央部に小型エンジン12が具備され、小型エンジンからの出力を車軸10に供給され、車軸10の回転出力を前後車輪9に伝動し機体方向制御時には正逆変換用サーボモーター6により車軸10の回転方向を変換し前後左右方向の方向制御が出来る構成とする。
【0019】
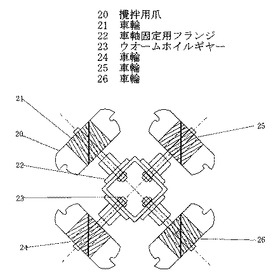
前記農業管理ロボットは、図2に示すように前後左右車輪正転の場合は、前方の推力が前進移動に利用され、外向きと内向きの推力が土壌の撹拌に利用され、走行しながらの除草作業が可能であり、機体中央部に搭載のエンジン12の出力により車軸10を正逆変換用サーボモーター6で制御して、車輪9の正転、逆転の回転方向の変換や、回転数変換が出来る構成とする。
【0020】
前記農業管理ロボットは、図1に示すように、走行確認用カメラ19が具備され、カメラ19で農業管理ロボットの走行前方映像を発信器14で発信し、ロボットから離れた場所の受信機で受信し、人が走行前方映像をモニターで確認しながら農業管理ロボットの遠隔操縦が出来る構成とする。また、農業管理ロボットはスイッチの切り替えで、自動運転も可能である。
【0021】
前記農業管理ロボットは、機体左右側面および前部に接触圧センサー18が具備され、稲株本を感知して搭載されているマイクロコンピュータ19により、正逆変換用サーボモーター6を制御して方向制御出来る構成とする。
【0022】
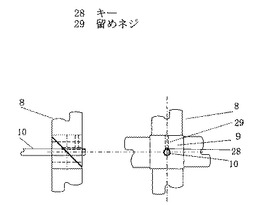
前記農業管理ロボットは、図3に示すように車軸28と車輪9の結合がキー,27および止めねじ28仕様となっており、撹拌爪8の車幅の変更や車輪9の交換が非常に簡単にできる構成とする。すなわち、前後除草車輪部は、稲の生長によって車幅が調整出来る構造であり、水田状態および土質に応じて交換できる構造とするとともに、撹拌爪部の形状が軟質土質や硬質土質に応じて交換できる構造である車輪を農業管理ロボットに設置して除草作業が出来る。
【産業上の利用可能性】
【0023】
本発明の農業管理ロボットは、低農薬農業栽培ばかりでなく有機農業栽培の一般生産者に普及することを可能とする。
【図面の簡単な説明】
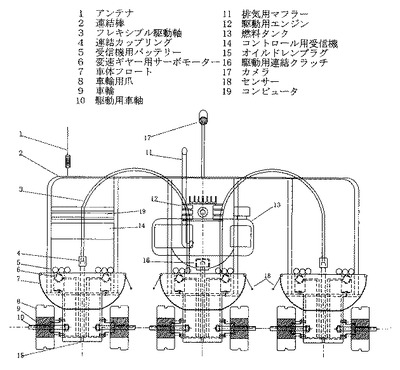
【図1】 本発明による農業管理ロボットを示した正面図である。
【図2】 農業管理ロボットの車体と車輪の配置を示した外観図である。
【図3】 車輪爪の配置を示した外観図である。
【符号の説明】
1・・・アンテナ
2・・・連結棒
3・・・フレキシブル駆動軸
4 連結用カップリング
5・・・受信機用バッテリー
6・・・正逆変換用サーボモーター
7・・・車体フロート
8・・・撹拌用爪
9・・・車輪
10・・車軸
11・・排気用マフラー
12・・駆動用エンジン
13・・燃料タンク
14・・受信機
15・・オイルドレンプラグ
16・・駆動用連結クラッチ
17・・カメラ
18・・センサー
19・・コンピュータ
20・・撹拌用爪
21・・左前車輪
22・・車軸固定用フランジ
23・・ウオームホイルギヤー
24・・左後車輪
25・・右前車輪
26・・右後車輪
27・・キー
28・・止めネジ
【技術分野】
【0001】
本発明は、田植え直後から初期除草および中耕除草が出来る農業管理ロボットに関する。
【背景技術】
【0002】
従来の水田除草機は、昔からの手押し型タイプ(特許文献1)とそれを動力型仕様(特許文献2)に改めたものがあり、また歩行用動力型では撹拌ローターを並列に進行方向横軸に複数配置した横軸芯回り回転方式があり、また前記とほぼ同じ除草作業構造のものを乗用型走行仕様(特許文献3)に改めたものがあり、更に前記の構造のものに株間除草を加えた補助ローターとして縦軸回転による撹拌構造を組み合わせたもの(特許文献4)、などが知られている。
【特許文献1】特開平08−140408
【特許文献2】特開2002−360006
【特許文献3】特開2002−045003
【特許文献4】特開2001−103802
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の除草機では、農薬の一つである除草剤と化学肥料を使用した稲の普通栽培圃場で、栽培期間中に除草機を1ないし2回使用する中耕除草効果のほかに、相乗効果として根の酸素供給または断根することにより分けつを促進し、稲株の健全化により増収することが水田除草機の役割であった。
【0004】
除草剤と化学肥料等を無使用で持続栽培することが前提条件であるため普通栽培圃場法では、数日後には再び繁茂を繰り返し水田除草機による除草効果は不充分で特に栽培面積を限られた。
【0005】
前記有機米制度に基づく有機米栽培は、無農薬無化学肥料のため労力を非常に必要とし、特に除草作業は過酷で重労働であり経営規模拡大には限度がある。
【0006】
水田除草機を利用する除草期間は、田植え後2週間後くらいから葉が繁茂し田面を軽く覆いする時期までであり地域差があるにしても、その期間は3週間から7週間前後である。
【0007】
前記有機米制度から、除草剤を使用しない栽培は稲栽培期間中ほぼ1週間に1回前後のサイクルで、水田除草機を3〜5回前後利用しなければならなく、除草回数の頻度が非常に高まることになる。従って前記手押し型タイプは、重労働で能率が上がらなく小面積しかできないこと。また代掻き間もない田植え直後は、まだ表面土壌の沈殿硬化が進んでいないため、初期除草した場合走行中に除草機による押し土の影響で周辺稲株を埋没や横倒し現象を起こす。
【0008】
また、前記歩行用動力型は、人の運転の力で、機体とともに泥濘の水田土壌を長時間且つ長距離歩行しなければならなく、また圃場枕地の方向転換の時に機体の持ち上げ移動作業が大変重い等ことから非常に過酷な重労働が要求される。そして除草ローターの回転によって発生する土圧水圧の影響で、田植え直後の小さく活着が完全でない稲株を横倒しや埋没してしまう問題をかかえる。
【0009】
前記乗用型走行仕様は高価で機体重量も重く、作業時に稲の条間を走行することで幅の狭い車輪が要求されるため、水田補場の路盤破壊が生じ、再度の走行を試みるとハンドル操作が不能になり直進性を失うと同時に、車輪付着土の持ち上がり落下の影響で、周辺稲株を横倒しや埋没してしまう、また旋回時に車輪が稲株を踏み付けて欠株の発生が多くなり、減収する。
【0010】
本発明は田植え初期から適切に繰り返し遠隔操作や自動運転で除草作業が出来る農業管理ロボットを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は上記の目的を請求項1〜5により達成する。
【発明の効果】
【0012】
請求項1記載の発明によれば、左右前車輪と左右後車輪それぞれ内向きに回転させることにより、前車輪では、前方の推力と外向きの推力、後車輪では、前方の推力と内向きの推力が働いて、前方走行しながら外向き内向きの推力で土壌を撹拌することが可能で、稲株の条間に沿って旋回せずに前後左右移動が可能で、土壌をより細かく撹拌でき雑草を土と完全に分離することが可能で、除草精度を一段と高め農薬の除草剤を減らせることが可能である。
【0013】
請求項2記載による発明によれば、機体移動方向は前後左右移動が可能で、旋回時には希望旋回方向(右または左)に、そのままの姿勢で移動が可能で、次の条間への移動が非常に簡単に出来ることを特徴とし、走行しながら土壌の攪拌、除草作業をする構造であり、除草車輪部の撹拌未処理部分を少なくする効果があり、除草精度を一段と高め農薬の除草剤を減らせることが可能である。
【0014】
請求項3記載による発明によれば、機体を並列に多連結することが出来、水田の大きさや栽培面積に応じて複数の機体を連結することが出来、小規模経営から大規模経営の有機栽培経営が可能である。
【0015】
請求項4記載による発明によれば、水田の土壌が軟質土質や硬質土質に応じて車輪が交換できる構造であり、軟質土壌から硬質土壌まで幅広い土壌状態に対応が可能で、雑草の種類や大きさに応じて車輪を交換することが可能である。
【0016】
請求項5記載による発明によれば、マイクロコンピュウタの制御または遠隔操縦により従来の除草機の操作運転の過酷な重労働から解放され、有機栽培の難問であった同一圃場での除草期間中の繰り返し除草作業が可能となった。また、農業管理ロボットの除草作業中は、他の作業が可能であり作業効率を一段と高め、経営規模拡大も可能である。
【発明を実施するための最良の形態】
【0017】
本発明の農業管理ロボットは、機体に小型エンジン12を搭載し、小型エンジンのの出力供給を受けて回転する車輪の撹拌爪が、車軸にたいして(45度仕様もしくは135度仕様)±0〜6度の傾きで装備して構成する農業管理ロボットであって、前後左右移動が可能で走行しながら土壌を撹拌し除草作業ができることを特徴とする農業管理ロボットである。
【0018】
前記農業管理ロボットは、図1に示すように、機体中央部に小型エンジン12が具備され、小型エンジンからの出力を車軸10に供給され、車軸10の回転出力を前後車輪9に伝動し機体方向制御時には正逆変換用サーボモーター6により車軸10の回転方向を変換し前後左右方向の方向制御が出来る構成とする。
【0019】
前記農業管理ロボットは、図2に示すように前後左右車輪正転の場合は、前方の推力が前進移動に利用され、外向きと内向きの推力が土壌の撹拌に利用され、走行しながらの除草作業が可能であり、機体中央部に搭載のエンジン12の出力により車軸10を正逆変換用サーボモーター6で制御して、車輪9の正転、逆転の回転方向の変換や、回転数変換が出来る構成とする。
【0020】
前記農業管理ロボットは、図1に示すように、走行確認用カメラ19が具備され、カメラ19で農業管理ロボットの走行前方映像を発信器14で発信し、ロボットから離れた場所の受信機で受信し、人が走行前方映像をモニターで確認しながら農業管理ロボットの遠隔操縦が出来る構成とする。また、農業管理ロボットはスイッチの切り替えで、自動運転も可能である。
【0021】
前記農業管理ロボットは、機体左右側面および前部に接触圧センサー18が具備され、稲株本を感知して搭載されているマイクロコンピュータ19により、正逆変換用サーボモーター6を制御して方向制御出来る構成とする。
【0022】
前記農業管理ロボットは、図3に示すように車軸28と車輪9の結合がキー,27および止めねじ28仕様となっており、撹拌爪8の車幅の変更や車輪9の交換が非常に簡単にできる構成とする。すなわち、前後除草車輪部は、稲の生長によって車幅が調整出来る構造であり、水田状態および土質に応じて交換できる構造とするとともに、撹拌爪部の形状が軟質土質や硬質土質に応じて交換できる構造である車輪を農業管理ロボットに設置して除草作業が出来る。
【産業上の利用可能性】
【0023】
本発明の農業管理ロボットは、低農薬農業栽培ばかりでなく有機農業栽培の一般生産者に普及することを可能とする。
【図面の簡単な説明】
【図1】 本発明による農業管理ロボットを示した正面図である。
【図2】 農業管理ロボットの車体と車輪の配置を示した外観図である。
【図3】 車輪爪の配置を示した外観図である。
【符号の説明】
1・・・アンテナ
2・・・連結棒
3・・・フレキシブル駆動軸
4 連結用カップリング
5・・・受信機用バッテリー
6・・・正逆変換用サーボモーター
7・・・車体フロート
8・・・撹拌用爪
9・・・車輪
10・・車軸
11・・排気用マフラー
12・・駆動用エンジン
13・・燃料タンク
14・・受信機
15・・オイルドレンプラグ
16・・駆動用連結クラッチ
17・・カメラ
18・・センサー
19・・コンピュータ
20・・撹拌用爪
21・・左前車輪
22・・車軸固定用フランジ
23・・ウオームホイルギヤー
24・・左後車輪
25・・右前車輪
26・・右後車輪
27・・キー
28・・止めネジ
【特許請求の範囲】
【請求項1】
機体にエンジンまたは電動モーターを搭載し、エンジンまたは電動モーターの出力供給を受けて回転する前後車軸が機体にx字型(対角線)に配置され、車輪の攪拌用爪が車軸と角(45度仕様もしくは135度仕様)±0〜6度の角度で取り付けられて装備されている農業管理ロボットであって、機体に取り付けられる車輪の配置は、前輪右車輪と後輪左車輪、そして前輪左車輪と後輪右車輪のそれぞれの車輪の向きの角度が平行になるように取り付、機体に具備されたギヤーにより、それぞれの車輪が単独で正転、逆転、停止が出来る構成であり、機体の前後移動や左右直角移動やスピンターンが可能であり、また機体に具備された操舵部により蛇行走行も可能であることを特徴とする農業管理ロボット。
【請求項2】
前記機体が方向制御時に、機体前方と左右側面に具備されたセンサーにより、稲株位置をキャッチし機体に搭載されたマイクロコンピュータにより、前後車輪の回転数や回転方向の正転逆転停止を制御して方向制御が出来る構成であり、前後の移動や左右直角移動やスピンターンが可能であることを特徴とする請求項1に記載された農業管理ロボット。
【請求項3】
前記機体は経営規模や栽培面積に応じて機体を並列に多連結できる仕様で除草作業ができることを特徴とする請求項1〜2の何れか1項に記載された農業管理ロボット。
【請求項4】
前後除草車輪部は、機体に具備されたフロートにより、稲の生長によって除草深さが調整出来る構造であり水田の土質に応じて調整できる構造とするとともに、撹拌爪部の形状が軟質土質や硬質土質に応じて交換できる構造である車輪を農業管理ロボットに設置して除草作業が出来ることを特徴とする請求項1〜3の何れか1項に記載された農業管理ロボット
【請求項5】
機体に設置されているカメラで走行状態の映像を発信器で発信し受信機が受信してモニターで機体の走行状態を確認して人が遠隔操作をすることが出来ることを特徴とし、カメラの映像を人がモニターで確認しながら遠隔操作をすることも出来るがスイッチの切り替えで、自動運転も可能である事を特徴とする請求項1〜4の何れか1項に記載の農業管理ロボット。
【請求項1】
機体にエンジンまたは電動モーターを搭載し、エンジンまたは電動モーターの出力供給を受けて回転する前後車軸が機体にx字型(対角線)に配置され、車輪の攪拌用爪が車軸と角(45度仕様もしくは135度仕様)±0〜6度の角度で取り付けられて装備されている農業管理ロボットであって、機体に取り付けられる車輪の配置は、前輪右車輪と後輪左車輪、そして前輪左車輪と後輪右車輪のそれぞれの車輪の向きの角度が平行になるように取り付、機体に具備されたギヤーにより、それぞれの車輪が単独で正転、逆転、停止が出来る構成であり、機体の前後移動や左右直角移動やスピンターンが可能であり、また機体に具備された操舵部により蛇行走行も可能であることを特徴とする農業管理ロボット。
【請求項2】
前記機体が方向制御時に、機体前方と左右側面に具備されたセンサーにより、稲株位置をキャッチし機体に搭載されたマイクロコンピュータにより、前後車輪の回転数や回転方向の正転逆転停止を制御して方向制御が出来る構成であり、前後の移動や左右直角移動やスピンターンが可能であることを特徴とする請求項1に記載された農業管理ロボット。
【請求項3】
前記機体は経営規模や栽培面積に応じて機体を並列に多連結できる仕様で除草作業ができることを特徴とする請求項1〜2の何れか1項に記載された農業管理ロボット。
【請求項4】
前後除草車輪部は、機体に具備されたフロートにより、稲の生長によって除草深さが調整出来る構造であり水田の土質に応じて調整できる構造とするとともに、撹拌爪部の形状が軟質土質や硬質土質に応じて交換できる構造である車輪を農業管理ロボットに設置して除草作業が出来ることを特徴とする請求項1〜3の何れか1項に記載された農業管理ロボット
【請求項5】
機体に設置されているカメラで走行状態の映像を発信器で発信し受信機が受信してモニターで機体の走行状態を確認して人が遠隔操作をすることが出来ることを特徴とし、カメラの映像を人がモニターで確認しながら遠隔操作をすることも出来るがスイッチの切り替えで、自動運転も可能である事を特徴とする請求項1〜4の何れか1項に記載の農業管理ロボット。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−82523(P2007−82523A)
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2005−307794(P2005−307794)
【出願日】平成17年9月22日(2005.9.22)
【出願人】(503350378)
【Fターム(参考)】
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成17年9月22日(2005.9.22)
【出願人】(503350378)
【Fターム(参考)】
[ Back to top ]