
農産物選別装置及び農産物選別装置用の選別ユニット

【課題】本発明は、簡易な構成でありながら、選別空間SSの選別幅を迅速かつ容易に調整することができるようにする。
【解決手段】平行に複数配置された選別軸21、22の軸方向に選別円盤30を複数配置し、隣り合う2本の前記選別軸21、22における選別円盤30間の空隙を選別空間SSとする農産物選別装置であって、選別円盤30が軸方向に摺動可能に取り付けられ、選別円盤30間に弾性部材としての圧縮コイルばね34が配置され、選別円盤30間の空隙が可変であるように構成する。
【解決手段】平行に複数配置された選別軸21、22の軸方向に選別円盤30を複数配置し、隣り合う2本の前記選別軸21、22における選別円盤30間の空隙を選別空間SSとする農産物選別装置であって、選別円盤30が軸方向に摺動可能に取り付けられ、選別円盤30間に弾性部材としての圧縮コイルばね34が配置され、選別円盤30間の空隙が可変であるように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、農産物選別装置及び農産物選別装置用の選別ユニットに関し、例えば馬鈴薯等の農産物をその形状に応じて選別する場合に適用して好適なものである。より具体的には、選別する農産物の大きさに合わせる調整作業を迅速に実行し得る農産物選別装置に関する。
【背景技術】
【0002】
従来、農産物選別装置においては、重量選別装置と形状選別装置とがあり。重量選別装置においては機械はかり式、電子はかり式等があり、形状選別装置においては機械式、光電式、カメラ式等がある。
【0003】
機械式の形状選別装置では、大きさの違いをふるいやロールなどの間隙を利用して仕分けるものであり、精度は若干落ちるが能率が良いため大量処理が可能で、しかも機械の構造が単純なのでメンテナンスも容易であり、比較的安価である。これらは、収穫した農産物から石、土塊、商品にならない小玉等を取り除く荒選別の場合に良く用いられる。
【0004】
このような機械式の形状選別装置としては、その具体的構成として、複数本の軸を平行に配置し、所望の選別する大きさに応じて、その軸ごとに複数枚の円盤をはめ込み、その円盤を同一方向に回転させるようにした選別装置が知られている(以下、このような形態のものを「形状選別装置」という)。
【0005】
このような形状選別装置においては、各回転軸を同一方向に回転させ、円盤の上に農産物を供給すると、農産物は前方から後方へと送られ、その間に空隙より小さいものは当該空隙より落下し、大きなものだけが後方へ送られる。このように形状選別装置は、円盤間の空隙の大きさによって農産物を選別するようになされている。
【0006】
なお、形状選別装置としては、具体的には以下の特許文献1〜4のようなものが知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9-225410 号公報(「農産物選別装置」(東洋農機))
【特許文献2】特開平11-319713 号公報(「複数回転盤式篩分け装置」(奥多摩工業))
【特許文献3】特開2006-21089 号公報(「農産物の選別装置」(信田農機))
【特許文献4】特開平2-35972 号公報(「果実選別装置」(原沢製作所))
【0008】
このような形状選別装置の空隙に対する調整方法は、通常、複数の円盤間の幅すなわち選別幅の調整により行われ、その調整方法としては以下のようなものが存在する。
【0009】
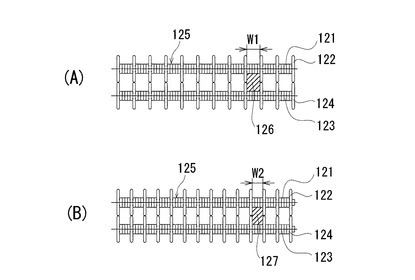
第1の調整方法として、特許文献1に記載された従来の馬鈴薯選別装置では、図12(A)及び(B)に示すように、回転軸121、123に複数取り付けられた円板122、124の円板間のスペーサ125の個数の増減(5個→4個)や、大きさの異なるスペーサへの交換等により、円板間の幅W1でなる選別空間126を幅W2の選別空間127へ調整することが行われている。
【0010】
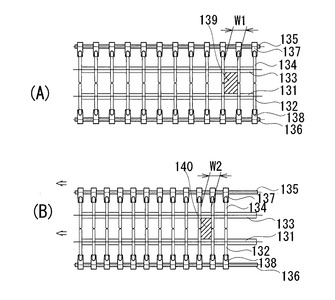
第2の調整方法として、特許文献1に記載された実施例の装置では、図13(A)及び(B)に示すように、回転軸131、133に複数取り付けられた各円板132、134を同時に同じ距離だけ移動させ、これにより、幅W1でなる選別空間139を幅W2でなる選別空間140に調整するようになされている。
【0011】
この場合、この装置では、スクレーパ軸135、136に取り付けられたスクレーパ137、138とパンタグラフ機構(図示せず)とを用いることにより、円板132、134そのものを保持しながら左右へ移動できるように構成されており、円板132、134を固定させるため、回転軸131、133に角柱状の原動カム(図示せず)を内装している。
【0012】
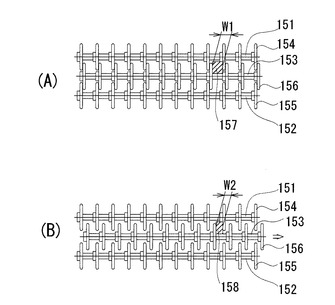
第3の調整方法として、特許文献2、3に記載された装置では、図14(A)及び(B)に示すように、固定回転軸151、152と選別空間調整用の可動回転軸153とを前後方向に平行配置し、可動回転軸153を軸方向(矢印方向)へ移動することにより、幅W1でなる選別空間157を幅W2でなる選別空間158に調整するようになされている。
【0013】
このように第1の調整方法及び第2の調整方法に対応した装置では、円板122と円板124(図12(A)及び(B))、円板132と円板134(図13(A)及び(B))が前後左右格子状に組み込まれ、前後方向の円板122と円板124(図12(A)及び(B))、円板132と円板134(図13(A)及び(B))のラインが同一直線状になっている。
【0014】
また、第3の調整方法に対応した装置では、固定回転軸151、152の複数の円板154、155と可動回転軸153の複数の円板156とが互いにはまり込むように組み込まれ、円板154、155、156が千鳥状態に配置されている。
【0015】
このような第1の調整方法乃至第3の調整方法に対応した装置においては、荒選別の場合、選別しようとするロットによって選別の大きさが変化し、商品として出荷する場合、最小の大きさがロットごとに異なり、選別のための微調整を迅速に行いたいという要望がある。
【発明の概要】
【発明が解決しようとする課題】
【0016】
しかしながら、第1の調整方法に対応した装置においては、調整時に回転軸から全ての円板122、124とスペーサ125を取り外し、馬鈴薯100の所定の厚さPTに合わせるための組み合わせのスペーサ125を所要組数用意し、それから円板122、124とスペーサ125とを再び回転軸121、123に取り付ける必要がある。この作業は、部品数と反復作業が多いため、多大の時間と労力を要し、更にスペーサ125の組み合わせを間違った場合、作業をやり直さなければならない。
【0017】
現在、この第1の調整方法を用いている装置の例では、調整に半日程度を要しており、その間の選別作業の中断を余儀なくされているという問題があった。
【0018】
また、第2の調整方法に対応した装置においては、円板132、134を同時に同じ距離だけ移動させると共に、円板132、134を軸131、132に固定する機構が必要なため、その構造が複雑になる(パンタグラフ式の機構が用いられている)ことに加えて、操作も簡便ではない(ナットを回転させて円板を回転軸方向へ摺動させる工程も回転軸ごとに行わなければならない)という問題があった。
【0019】
さらに第3の調整方法に対応した装置においては、数本の可動回転軸153を左右に移動させる必要があり、装置全体として大掛かりなものになるという問題があった。
【0020】
本発明は、以上のような問題点を解消するためになされたものであり、形状選別装置において簡易な構成でありながら、選別幅を迅速に調整し得る農産物選別装置を提案しようとするものである。
【課題を解決するための手段】
【0021】
請求項1に係る本発明においては、平行に複数配置された回転軸の軸方向に選別円盤を複数配置し、隣り合う2本の前記回転軸における選別円盤間の空隙を選別空間とする農産物選別装置であって、選別円盤が軸方向に摺動可能に取り付けられ、選別円盤間に弾性部材が配置され、選別円盤間の空隙が可変であるよう構成されたものである。
【0022】
これにより農産物選別装置は、選別円盤間の空隙でなる間隔の可変を容易に実現できると共に、弾性部材の弾性力により選別円盤の軸方向への位置決めも容易に実現することができる。
【0023】
また、請求項2に係る本発明においては、弾性部材として入手容易な圧縮コイルばねを用いることができる。
【0024】
さらに、請求項3に係る本発明においては、選別円盤と回転軸との嵌合部分の断面が多角形であることにより、選別円盤だけが回転軸とは別に当該回転軸の周方向へ回転してしまうことを未然に防止し、回転軸と選別円盤とが一体となった状態で回転する動作を保証することができる。
【0025】
さらに、請求項4及び請求項5に係る本発明においては、スライドねじ軸の回転に応じて回転軸方向へスライドガイド部を移動させたことに伴い、中空部材が回転軸上を摺動しながら選別円盤も軸方向へ摺動することになるので、選別円盤間の間隔調整作業を容易に実現することができる。
【0026】
さらに、請求項6に係る本発明においては、選別円盤の摺動と連動して同一方向へスクレーパが移動するので、選別円盤間の間隔調整作業を行った後でも、選別円盤に付着した異物を確実に除去し、選別装置としての性能を維持することができる。
【0027】
さらに、請求項7及び請求項8に係る本発明においては、農産物選別装置の選別部分に相当する最小ユニットを提供することができるので、能率、量、農産物の種類等に応じて当該選別ユニットを適宜組み合わせることができ、かくして選別装置の規模を拡大したり、縮小する等の設計を容易にすることができる。
【発明の効果】
【0028】
以上説明したように、本発明によれば、簡易な構成であり、かつ簡単な操作により、農産物選別装置における選別空間の空隙調整作業に要する時間を大幅に短縮することができる。また、本発明によれば、選別作業を中断することなく、農産物選別装置の稼働中であっても、選別空間の空隙調整作業を実行することができる。
【0029】
さらに本発明によれば、弾性部材が軸方向への力によって変形するため、選別空間の空隙の微調整(例えば、1mm単位)を実現し得、選別処理結果の精度向上に寄与することができる。さらに本発明によれば、 回転軸を2軸で1セットとし、系列数を増やす仕組みとしたことにより、従来の選別部が固定でかつ一体型の選別装置に比べて、ユーザの希望能率の変更に対して柔軟かつ容易に対応することができる。
【図面の簡単な説明】
【0030】
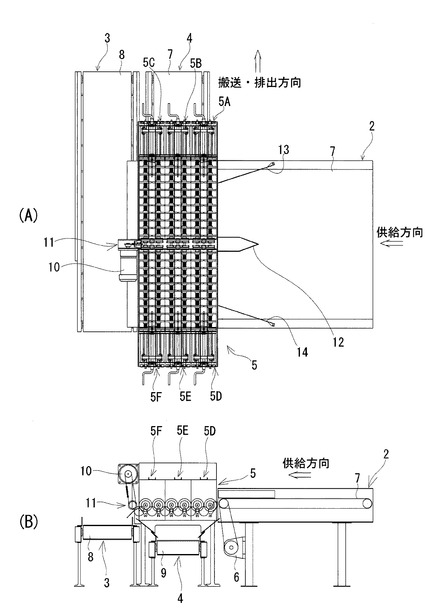
【図1】本発明の実施の形態における形状選別装置の全体構成を示す上面図及び側面図である。
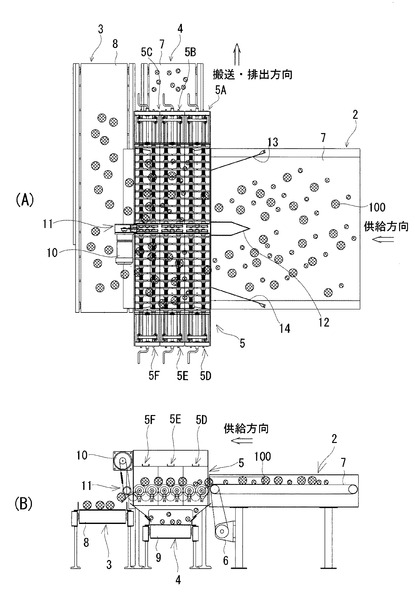
【図2】本発明の実施の形態における形状選別装置による選別動作の説明に供する線図である。
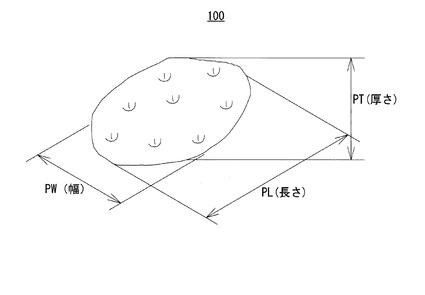
【図3】馬鈴薯の寸法を示す線図である。
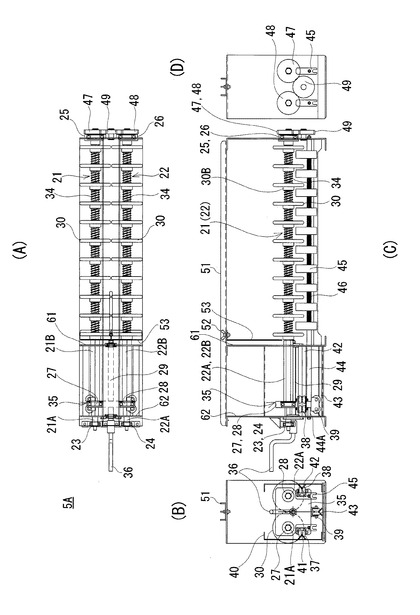
【図4】本発明の実施の形態における選別ユニットの構成を示す線図である。
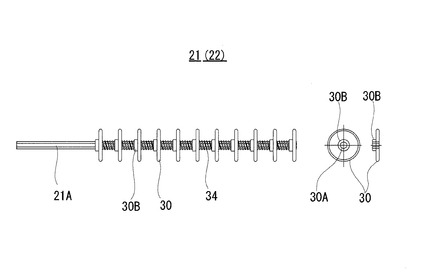
【図5】本発明の実施の形態における選別軸の構成を示す線図である。
【図6】本発明の実施の形態における選別円盤のバリエーションを示す線図である。
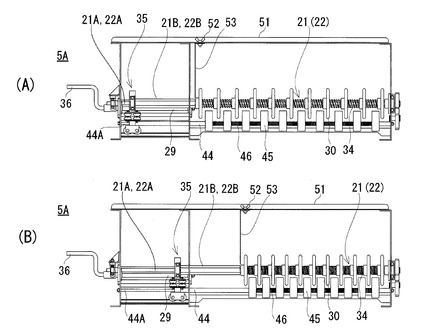
【図7】本発明の実施の形態における選別ユニットの調整の説明に供する線図である。
【図8】本発明の実施の形態における間隔調整例を示す線図である。
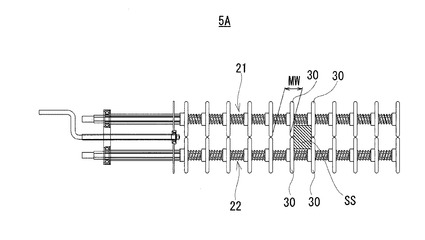
【図9】選別ユニットの選別幅に応じた選別の説明に供する線図である。
【図10】本発明の実施の形態における駆動機構の模式図である。
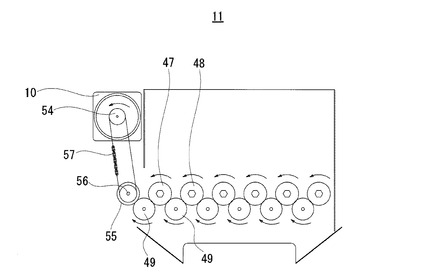
【図11】本発明の実施の形態における駆動機構の系統図である。
【図12】従来の円板間のスペーサによる調整の説明に供する線図である。
【図13】従来の円板を保持して左右へ移動することによる調整の説明に供する線図である。
【図14】従来の選別空間用の軸による調整の説明に供する線図である。
【発明を実施するための形態】
【0031】
(1)形状選別装置の全体構成
以下、本発明の実施の形態について図を参照して説明する。図1(A)及び(B)、図2(A)及び(B)において、5は、全体として本発明の実施の形態における形状選別装置を示す。
【0032】
この形状選別装置5は、入口シュートとなる上流側に配置されて右側から左側の供給方向へ選別対象の農産物を供給する供給コンベア2と、出口シュートとなる下流側に配置されて下方から上方の搬送方向へ選別後の農産物を搬送する搬送コンベア3と、供給コンベア2及び搬送コンベア3の間に配置され、搬送コンベア3と同様に下方から上方の排出方向へ選別対象ではない大きさの農産物等を排出する排出コンベア4と互いに組み合わされて用いられ、当該形状選別装置5が排出コンベア4の真上に配置されている。
【0033】
供給コンベア2は、供給コンベアモータ6によりベルト7を供給方向へ回転駆動することにより、当該ベルト7の上に置かれた農産物、例えば馬鈴薯を形状選別装置5に供給する。
【0034】
また、搬送コンベア3は、図示しない搬送コンベアモータによりベルト8を搬送方向へ回転駆動することにより、形状選別装置5によって選別された後の一定の大きさ以上の農産物をベルト8を介して搬送する。
【0035】
さらに、排出コンベア4は、図示しない排出コンベアモータによりベルト9を排出方向へ回転駆動することにより、形状選別装置5によって選別された後に下方に落とされた選別対象外の大きさでなる農産物や、その他の土塊等をベルト9を介して排出する。
【0036】
ところで、図3に示すように、形状選別装置5により選別される農産物として一般的に馬鈴薯100があり、この馬鈴薯100は球を押しつぶしたような形状を有し、その寸法は長さPL>幅PW>厚さPTとなっている。
【0037】
すなわち形状選別装置5は、供給コンベア2のベルト7を介して運ばれてくる複数の農産物たとえば馬鈴薯100のうち、所定の大きさ(厚さPT)よりも大きいものだけを選別し、その選別した複数の馬鈴薯100を搬送コンベア3のベルト8を介して搬送し得るようになされている。
【0038】
その一方、形状選別装置5は、所定の大きさ(厚さPT)よりも小さい馬鈴薯100の規格外品や土塊、小石等を当該形状選別装置5の下方に配置された排出コンベア4のベルト9を介して排出し得るようになされている。
【0039】
(2)形状選別装置の具体的構成
形状選別装置5(図1、図2)は、3個の選別ユニット5A〜5Cが供給方向に沿って並列に並べられ、3個の選別ユニット5D〜5Fが供給方向に沿って並列に並べられ、かつ、選別ユニット5A〜5Cと選別ユニット5D〜5Fとが互いの一端部を対向させた状態で配置された構成を有する。
【0040】
但し、形状選別装置5は、6個の選別ユニット5A〜5Fによって構成されるだけではなく、能率、選別の量、及び農産物の種類等に応じた、その他種々の個数の選別ユニット5によって構成されても良く、例えば選別ユニット5の数を多くした場合、選別機会を増大させることが出来るので、一段と正確な選別結果を得ることができるようになされている。
【0041】
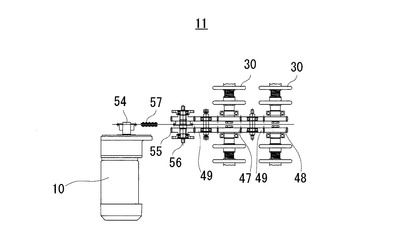
また形状選別装置5は、選別ユニット5A〜5Cの一端と、選別ユニット5D〜5Fの一端とが向かい合ったほぼ中間部分に駆動機構11が設けられ、当該駆動機構11には動力を供給するための駆動モータ10が取り付けられている。
【0042】
従って形状選別装置5は、駆動モータ10及び駆動機構11を介して選別ユニット5A〜5C及び選別ユニット5D〜5Fを供給方向へ回転駆動させることにより、選別ユニット5A〜5C及び選別ユニット5D〜5Fの上を転がりながら乗り継がれて移動する複数の馬鈴薯100を選別しながら搬送コンベア3へ受け渡すようになされている。
【0043】
なお形状選別装置5は、馬鈴薯100の供給側である供給コンベア2のベルト7上に載置されるように中央供給ガイド部12が設けられ、かつベルト7上に載置されるように右供給ガイド部13及び左供給ガイド部14が設けられている。
【0044】
これにより形状選別装置5は、ベルト7上で運ばれてくる複数の馬鈴薯100が右供給ガイド部13及び左供給ガイド部14によってベルト7上から落ちずに、かつ、中央供給ガイド部12によって駆動機構11に衝突することなく当該形状選別装置5の選別ユニット5A及び選別ユニット5Dへ導かれるようになされている。
【0045】
(2−1)選別ユニットの構成
次に形状選別装置5を構成している最小ユニットである選別ユニット5A〜5Fについて説明するが、選別ユニット5A〜5Fは全て同一構造であるため、説明の便宜上、選別ユニット5Aについてのみ図4(A)〜(D)を用いて説明し、残りの説明は省略する。なお、図4(A)〜(D)においては、見易さの観点から本来隠れ線で表示されるべき線についても実線で表現している。
【0046】
図4(A)〜(D)に示すように、選別ユニット5Aは、互いに平行な2本の選別軸21、22が一対となり、その一端が軸受23、24によって軸支されると共に、その他端が軸受25、26によって軸支されている。この軸受23〜26については、本来は隠れ線で表現されるものである。
【0047】
この選別軸21(22)は、図5に示すように、その軸断面が六角形状の回転軸21A(22A)、その回転軸21A(22A)の通過孔として六角形孔30Aがボス30Bに形成された当該ボス30Bと一体構造のゴム状の弾性体でなる複数の選別円盤30(この場合、例えば11個)、及び複数の選別円盤30の間にそれぞれ配置された弾性部材としての圧縮コイルばね34(この場合、10個)によって構成されている。
【0048】
選別円盤30は、全体として円形状でなり、選別軸21における断面六角形状の回転軸21Aが当該選別円盤30のボス30Bの六角形孔30Aを通過するようになされており、当該選別円盤30が回転軸21A上を軸方向へ摺動し得るようになされている。
【0049】
すなわち選別円盤30と、回転軸21Aとは、その嵌合部分の断面が多角形状であれば良く、これにより選別円盤30が回転軸21Aの周方向へ回転してしまうことを防止し、かつ回転軸21Aと選別円盤30とが一体となって回転動作することを保証し得るようになされている。
【0050】
また、隣接する2つの選別円盤30の間に配置された圧縮コイルばね34は、全て同じ長さであり、かつ全て同じばね定数を持ち、隣接する選別円盤30の全ての間隔が等しくなっている。因みに、圧縮コイルばね34のばね定数は適宜定めることができる。
【0051】
なお、選別円盤30の材質、形状及び構造としては、これに限るものではなく、図6(A)〜図6(C)に示すような選別円盤31、32及び33等が考えられる。
【0052】
選別円盤31(図6(A))は、選別円盤30のようなボス30Bが設けられていないものの、その分だけ全体の厚さが増した構成を有し、その中央部には、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔31Aが形成されている。
【0053】
選別円盤32(図6(B))は、選別円盤30のようなボス30Bが設けられておらず、かつ、円形状の中心部から外周部へ向かって次第に細くなるような構成を有し、その中央部には、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔32Aが形成されている。
【0054】
選別円盤33(図6(C))は、全体の外形が6角形状でなり、その中央部には、選別円盤30のボス30Bと同様のボス33Bが設けられ、かつ、そのボス33Bに対して、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔33Aが形成されている。
【0055】
このように選別円盤30(図4)の形状及び構造としては、上述した選別円盤31、32及び33のような種々の形状及び構造が考えられ、これら以外にもロール形、多角形等のその他の形状及び構造であってもよい。
【0056】
また選別ユニット5A(図4)は、 2本の選別軸21、22の芯間に合わせてはめ込まれた軸受27、28(本来は隠れ線で表示されるもの)と一体化されているスライドガイド35を有する。
【0057】
選別軸21、22は、一方の先端部分において、回転軸21A、22Aがその内部に挿入された六角パイプでなる中空部材21B、22Bを有し、これにより中空部材21B、22Bが回転軸21A、22A上を軸方向へ摺動し得るようになされている。
【0058】
中空部材21B、22Bは、その先端に加工が施されており、これにより当該中空部材21B、22Bが回転自在にスライドガイド35の軸受27、28で支持されるようになされている。
【0059】
スライドねじ軸29は、その両端がプレート61、62に対し、回転自在に軸受で支持されており、当該スライドねじ軸29の先端にはユーザが回転動作するためのハンドル36が取り付けられている。
【0060】
一方、スライドガイド35には、2本の選別軸21、22間の中心部分に雌ねじが設けられ、そこにスライドねじ軸29の雄ねじが係合されている。
【0061】
従って、ハンドル36を介してスライドねじ軸29が回転された場合、図7及び図8に示すように、スライドガイド35が移動し、回転軸21A、22Aを覆っている中空部材21B、22Bが当該スライドガイド35と共に当該回転軸21A、22A上を摺動する。
【0062】
因みに選別ユニット5Aでは、図9に示すように、選別ユニット5Aにおける選別軸21に複数取り付けられた隣接する2枚の選別円盤30と、当該選別5Aにおける選別軸22に複数取り付けられた隣接する2枚の選別円盤30とによって形成される幅MWでなる選別空間SSを介して馬鈴薯100(図3)を選別するようになされている。
【0063】
この場合、選別ユニット5Aでは、2枚の選別円盤30の幅の幅によって決定される選別幅MWが馬鈴薯100の厚さPTよりも大きければ(選別幅MW>厚さPT)、その厚さPTよりも小さい馬鈴薯100だけを選別空間SSから落下させて排出し、その厚さPTよりも大きい馬鈴薯100だけを選別するようになされている。
【0064】
このような構成の選別ユニット5Aでは、中空部材21B、22Bにより選別円盤30が押され、10個の圧縮コイルばね34がその付勢力に反してそれぞれ均等に縮むことにより、複数の選別円盤30を全体的に移動させ、その結果、図7(A)及び(B)に示したように、11個の選別円盤30間の空隙すなわち選別空間SSの幅MW1が幅MW2へ均等に狭くなる。この際、選別ユニット5Aでは、ユーザによるハンドル36の回転量に応じて11個の選別円盤30間の空隙を任意に調整して変化させ得るようになされている。
【0065】
なお、この選別ユニット5Aでは、選別空間SSの幅MW1の最大値が50mm、幅MW2の最小値が35mm、圧縮コイルばね34の長さが24mm〜39mmであり、スライドガイド35の最大移動距離は150mmとなっている。但し、これらの値は選別ユニット5Aのサイズや、対象とすべき農産物の種類に応じて適宜変更することができる。
【0066】
なおスライドガイド35は、その左右両側にスライドローラ37、38が設けられ、かつ当該スライドガイド35の下方にスライドローラ39が設けられている。また、これらのスライドローラ37、38及び39と対向した筐体40の対応箇所には、側面レールガイド41、42及び下面レールガイド43が設けられている。
【0067】
従ってスライドガイド35は、ハンドル36が回転されたとき、スライドローラ37、38及び39が側面レールガイド41、42上、及び下面レールガイド43上を転がり、当該スライドガイド35がプレート61、62間を滑らかに移動し得るようになされている。
【0068】
さらに選別ユニット5Aは、選別軸21(22)の下方に設けられたスクレーパパイプ軸44に対して複数のスクレーパ45(この場合、10個)が設けられている。この複数のスクレーパ45は、選別軸21の複数の選別円盤30の間で当該複数の選別円盤30と互い違いに配置されている。
【0069】
このスクレーパパイプ軸44は、その端部がプレート62に軸支されたスクレーパ軸44Aをその内部に挿通した構成を有し、スクレーパパイプ軸44がスクレーパ軸44A上を軸方向へ摺動し得るようになされている。
【0070】
またスクレーパパイプ軸44には、複数のスクレーパ45の間にそれぞれスクレーパばね46が取り付けられている。これら複数のスクレーパばね46は全て同じ長さであり、かつ全て同じばね定数を持ち、隣接する複数のスクレーパ45同士の間隔と、隣接する複数の選別円盤30同士の間隔とほぼ同じ距離となっている。
【0071】
なお、複数のスクレーパ45は、スクレーパパイプ軸44が回転することなく、当該複数のスクレーパ45と選別軸21の圧縮コイルばね34とが所定の間隔だけ離れた状態で配置されたことにより、選別時に圧縮コイルばね34に付着した泥等をスクレーパ45により除去し得るようになされている。
【0072】
そして、これら複数のスクレーパ45は、スライドガイド35の移動に伴って複数の選別円盤30が全体的に移動した際、中空部材21B、22Bがスライドガイド35と共に回転軸21A、22A上を摺動すると共に、スクレーパパイプ軸44がスクレーパ軸44A上を摺動する。
【0073】
従って選別ユニット5Aは、図8(A)及び(B)において、スクレーパパイプ軸44により左端のスクレーパ45が押された結果、複数のスクレーパばね46の付勢力に反してそれぞれ均等に縮むことにより、複数の選別円盤30と複数のスクレーパ45とが連動した状態で同一方向へ移動されるようになされている。
【0074】
ところで選別ユニット5Aは、上部フレーム51に対し、ちょうボルト52を介して選別ガイド板53が取り付けられており、当該選別ガイド板53よりも中空部材21B、22B側へ選別対象の馬鈴薯100が転がり進むことを防止するようになされている。
【0075】
すなわち図8(A)及び(B)に示したように選別ユニット5Aでは、複数の選別円盤30が全体的に移動された際、ちょうボルト52が緩められて選別ガイド板53が選別円盤30側へ移動させられた後に、ちょうボルト52が締め付けられるようになされている。
【0076】
なお、選別軸21、22(図4)は、その他端部において選別軸駆動歯車47、48に取り付けられており、また選別軸駆動歯車47、48の間には選別軸21、22を同一方向へ回転させるための中間歯車49が当該選別軸駆動歯車47、48と係合するように取り付けられている。
【0077】
図10及び図11に示すように、形状選別装置5における供給ガイド板12(図1)の内側に配置された駆動機構11は、選別軸駆動モータ10の駆動スプロケット54及びローラチェーン57を介して伝達歯車55の駆動伝達軸56を回転駆動することによって、中間歯車49、選別軸駆動歯車47、中間歯車49、選別軸駆動歯車48、……、を矢印方向へ回転駆動する。
【0078】
この場合の駆動機構11では、選別軸駆動モータ10における駆動スプロケット54のスプロケット比、伝達歯車55の歯車比がいずれも1:1となるように設定されている。これにより駆動機構11は、選別軸駆動モータ10の出力回転数がそのまま選別軸駆動歯車47、48、……、の回転数となるため、回転数の変更可能なインバータ付きモータを使用している。但し、これに限るものではないことは言うまでもない。
【0079】
なお、駆動機構11は、選別円盤30の直径、処理量、農産物の種類等によるが、選別軸21、22の回転数を50rpm前後とすることが多い。
【0080】
(3)動作及び効果
以上の構成において、形状選別装置1の選別ユニット5Aは、ハンドル36に対する回転操作により複数の選別円盤30を回転軸21A、22Aの軸方向へ摺動させながら移動させることができるので、選別円盤30間の空隙すなわち選別空間SSの幅MW1を幅MW2(図7)に変化させることができる。
【0081】
このとき、選別ユニット5Aでは、ユーザによるハンドル36の回転量に応じて11個の選別円盤30間の空隙を任意に調整し得ると共に、比較的入手容易な全て同じばね定数でなる圧縮コイルばね34が選別円盤30間に設けられているので、圧縮コイルばね34の付勢力により選別円盤30間の空隙を全て均等にした状態で位置決めすることができる。
【0082】
また選別ユニット5Aは、複数の選別円盤30と回転軸21A、22Aとの嵌合部分の断面が多角形状(この場合、六角形状)とされたことにより、駆動機構11により選別軸21、22が回転駆動されたことに対して、選別軸21、22の回転軸21A、22Aと選別円盤30とが一体に回転動作し、農産物を供給側から搬送・排出側へ確実に受け渡すことができる。
【0083】
さらに選別ユニット5Aは、複数の選別円盤30間にそれぞれスクレーパ45が配置され、選別円盤30の移動と連動してスクレーパ45も同一方向へ移動させることができるので、選別円盤30の移動前後に拘わらず、圧縮コイルばね34に付着した異物をスクレーパ45によって確実に除去することができる
【0084】
形状選別装置1では、このような選別ユニット5A〜5Fを最小ユニットとして複数組み合わせることができるので、能率、量、農産物の種類等に応じて当該選別ユニット5A〜5Fを適宜組み合わせることにより、希望能率に対して容易に対応することができる。
【0085】
以上の構成によれば、形状選別装置1は、簡易な構成でありながら、選別空間SSの選別幅を迅速かつ容易に調整することができる。
【0086】
(4)他の実施の形態
なお上述の実施の形態においては、選別対象の農産物として馬鈴薯を一例として説明したが、本発明はこれに限らず、形状(大きさ)で選別できるものであれば、タマネギ、リンゴ、ミカン、オレンジ等のその他種種の農産物をその形状に応じて選別するようにしても良い。
【0087】
また上述の実施の形態においては、弾性部材として圧縮コイルばね34を用いるようにした場合について述べたが、本発明はこれに限らず、スポンジ状部材、ゴム状部材等のその他種々の弾性部材を用いるようにしても良い。
【0088】
さらに上述の実施の形態においては、選別対象の農産物を搬送コンベア3により搬送し、選別対象以外のものを排出コンベア4により排出するようにした場合について述べたが、本発明はこれに限らず、選別対象の農産物を排出コンベア4により排出し、選別対象以外のものを搬送コンベア3により搬送するようにしても良い。
【符号の説明】
【0089】
2……供給コンベア、3……搬送コンベア、4……排出コンベア、5……形状選別装置、10……選別軸駆動モータ、21、22……選別軸、29……スライドねじ軸、30、31、32、33……選別円盤、34……圧縮コイルばね、35……スライドガイド、36……ハンドル、45……スクレーパ、53……選別ガイド板、55……伝達歯車、47、48……選別軸駆動歯車、49……中間歯車、100……馬鈴薯。
【技術分野】
【0001】
本発明は、農産物選別装置及び農産物選別装置用の選別ユニットに関し、例えば馬鈴薯等の農産物をその形状に応じて選別する場合に適用して好適なものである。より具体的には、選別する農産物の大きさに合わせる調整作業を迅速に実行し得る農産物選別装置に関する。
【背景技術】
【0002】
従来、農産物選別装置においては、重量選別装置と形状選別装置とがあり。重量選別装置においては機械はかり式、電子はかり式等があり、形状選別装置においては機械式、光電式、カメラ式等がある。
【0003】
機械式の形状選別装置では、大きさの違いをふるいやロールなどの間隙を利用して仕分けるものであり、精度は若干落ちるが能率が良いため大量処理が可能で、しかも機械の構造が単純なのでメンテナンスも容易であり、比較的安価である。これらは、収穫した農産物から石、土塊、商品にならない小玉等を取り除く荒選別の場合に良く用いられる。
【0004】
このような機械式の形状選別装置としては、その具体的構成として、複数本の軸を平行に配置し、所望の選別する大きさに応じて、その軸ごとに複数枚の円盤をはめ込み、その円盤を同一方向に回転させるようにした選別装置が知られている(以下、このような形態のものを「形状選別装置」という)。
【0005】
このような形状選別装置においては、各回転軸を同一方向に回転させ、円盤の上に農産物を供給すると、農産物は前方から後方へと送られ、その間に空隙より小さいものは当該空隙より落下し、大きなものだけが後方へ送られる。このように形状選別装置は、円盤間の空隙の大きさによって農産物を選別するようになされている。
【0006】
なお、形状選別装置としては、具体的には以下の特許文献1〜4のようなものが知られている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9-225410 号公報(「農産物選別装置」(東洋農機))
【特許文献2】特開平11-319713 号公報(「複数回転盤式篩分け装置」(奥多摩工業))
【特許文献3】特開2006-21089 号公報(「農産物の選別装置」(信田農機))
【特許文献4】特開平2-35972 号公報(「果実選別装置」(原沢製作所))
【0008】
このような形状選別装置の空隙に対する調整方法は、通常、複数の円盤間の幅すなわち選別幅の調整により行われ、その調整方法としては以下のようなものが存在する。
【0009】
第1の調整方法として、特許文献1に記載された従来の馬鈴薯選別装置では、図12(A)及び(B)に示すように、回転軸121、123に複数取り付けられた円板122、124の円板間のスペーサ125の個数の増減(5個→4個)や、大きさの異なるスペーサへの交換等により、円板間の幅W1でなる選別空間126を幅W2の選別空間127へ調整することが行われている。
【0010】
第2の調整方法として、特許文献1に記載された実施例の装置では、図13(A)及び(B)に示すように、回転軸131、133に複数取り付けられた各円板132、134を同時に同じ距離だけ移動させ、これにより、幅W1でなる選別空間139を幅W2でなる選別空間140に調整するようになされている。
【0011】
この場合、この装置では、スクレーパ軸135、136に取り付けられたスクレーパ137、138とパンタグラフ機構(図示せず)とを用いることにより、円板132、134そのものを保持しながら左右へ移動できるように構成されており、円板132、134を固定させるため、回転軸131、133に角柱状の原動カム(図示せず)を内装している。
【0012】
第3の調整方法として、特許文献2、3に記載された装置では、図14(A)及び(B)に示すように、固定回転軸151、152と選別空間調整用の可動回転軸153とを前後方向に平行配置し、可動回転軸153を軸方向(矢印方向)へ移動することにより、幅W1でなる選別空間157を幅W2でなる選別空間158に調整するようになされている。
【0013】
このように第1の調整方法及び第2の調整方法に対応した装置では、円板122と円板124(図12(A)及び(B))、円板132と円板134(図13(A)及び(B))が前後左右格子状に組み込まれ、前後方向の円板122と円板124(図12(A)及び(B))、円板132と円板134(図13(A)及び(B))のラインが同一直線状になっている。
【0014】
また、第3の調整方法に対応した装置では、固定回転軸151、152の複数の円板154、155と可動回転軸153の複数の円板156とが互いにはまり込むように組み込まれ、円板154、155、156が千鳥状態に配置されている。
【0015】
このような第1の調整方法乃至第3の調整方法に対応した装置においては、荒選別の場合、選別しようとするロットによって選別の大きさが変化し、商品として出荷する場合、最小の大きさがロットごとに異なり、選別のための微調整を迅速に行いたいという要望がある。
【発明の概要】
【発明が解決しようとする課題】
【0016】
しかしながら、第1の調整方法に対応した装置においては、調整時に回転軸から全ての円板122、124とスペーサ125を取り外し、馬鈴薯100の所定の厚さPTに合わせるための組み合わせのスペーサ125を所要組数用意し、それから円板122、124とスペーサ125とを再び回転軸121、123に取り付ける必要がある。この作業は、部品数と反復作業が多いため、多大の時間と労力を要し、更にスペーサ125の組み合わせを間違った場合、作業をやり直さなければならない。
【0017】
現在、この第1の調整方法を用いている装置の例では、調整に半日程度を要しており、その間の選別作業の中断を余儀なくされているという問題があった。
【0018】
また、第2の調整方法に対応した装置においては、円板132、134を同時に同じ距離だけ移動させると共に、円板132、134を軸131、132に固定する機構が必要なため、その構造が複雑になる(パンタグラフ式の機構が用いられている)ことに加えて、操作も簡便ではない(ナットを回転させて円板を回転軸方向へ摺動させる工程も回転軸ごとに行わなければならない)という問題があった。
【0019】
さらに第3の調整方法に対応した装置においては、数本の可動回転軸153を左右に移動させる必要があり、装置全体として大掛かりなものになるという問題があった。
【0020】
本発明は、以上のような問題点を解消するためになされたものであり、形状選別装置において簡易な構成でありながら、選別幅を迅速に調整し得る農産物選別装置を提案しようとするものである。
【課題を解決するための手段】
【0021】
請求項1に係る本発明においては、平行に複数配置された回転軸の軸方向に選別円盤を複数配置し、隣り合う2本の前記回転軸における選別円盤間の空隙を選別空間とする農産物選別装置であって、選別円盤が軸方向に摺動可能に取り付けられ、選別円盤間に弾性部材が配置され、選別円盤間の空隙が可変であるよう構成されたものである。
【0022】
これにより農産物選別装置は、選別円盤間の空隙でなる間隔の可変を容易に実現できると共に、弾性部材の弾性力により選別円盤の軸方向への位置決めも容易に実現することができる。
【0023】
また、請求項2に係る本発明においては、弾性部材として入手容易な圧縮コイルばねを用いることができる。
【0024】
さらに、請求項3に係る本発明においては、選別円盤と回転軸との嵌合部分の断面が多角形であることにより、選別円盤だけが回転軸とは別に当該回転軸の周方向へ回転してしまうことを未然に防止し、回転軸と選別円盤とが一体となった状態で回転する動作を保証することができる。
【0025】
さらに、請求項4及び請求項5に係る本発明においては、スライドねじ軸の回転に応じて回転軸方向へスライドガイド部を移動させたことに伴い、中空部材が回転軸上を摺動しながら選別円盤も軸方向へ摺動することになるので、選別円盤間の間隔調整作業を容易に実現することができる。
【0026】
さらに、請求項6に係る本発明においては、選別円盤の摺動と連動して同一方向へスクレーパが移動するので、選別円盤間の間隔調整作業を行った後でも、選別円盤に付着した異物を確実に除去し、選別装置としての性能を維持することができる。
【0027】
さらに、請求項7及び請求項8に係る本発明においては、農産物選別装置の選別部分に相当する最小ユニットを提供することができるので、能率、量、農産物の種類等に応じて当該選別ユニットを適宜組み合わせることができ、かくして選別装置の規模を拡大したり、縮小する等の設計を容易にすることができる。
【発明の効果】
【0028】
以上説明したように、本発明によれば、簡易な構成であり、かつ簡単な操作により、農産物選別装置における選別空間の空隙調整作業に要する時間を大幅に短縮することができる。また、本発明によれば、選別作業を中断することなく、農産物選別装置の稼働中であっても、選別空間の空隙調整作業を実行することができる。
【0029】
さらに本発明によれば、弾性部材が軸方向への力によって変形するため、選別空間の空隙の微調整(例えば、1mm単位)を実現し得、選別処理結果の精度向上に寄与することができる。さらに本発明によれば、 回転軸を2軸で1セットとし、系列数を増やす仕組みとしたことにより、従来の選別部が固定でかつ一体型の選別装置に比べて、ユーザの希望能率の変更に対して柔軟かつ容易に対応することができる。
【図面の簡単な説明】
【0030】
【図1】本発明の実施の形態における形状選別装置の全体構成を示す上面図及び側面図である。
【図2】本発明の実施の形態における形状選別装置による選別動作の説明に供する線図である。
【図3】馬鈴薯の寸法を示す線図である。
【図4】本発明の実施の形態における選別ユニットの構成を示す線図である。
【図5】本発明の実施の形態における選別軸の構成を示す線図である。
【図6】本発明の実施の形態における選別円盤のバリエーションを示す線図である。
【図7】本発明の実施の形態における選別ユニットの調整の説明に供する線図である。
【図8】本発明の実施の形態における間隔調整例を示す線図である。
【図9】選別ユニットの選別幅に応じた選別の説明に供する線図である。
【図10】本発明の実施の形態における駆動機構の模式図である。
【図11】本発明の実施の形態における駆動機構の系統図である。
【図12】従来の円板間のスペーサによる調整の説明に供する線図である。
【図13】従来の円板を保持して左右へ移動することによる調整の説明に供する線図である。
【図14】従来の選別空間用の軸による調整の説明に供する線図である。
【発明を実施するための形態】
【0031】
(1)形状選別装置の全体構成
以下、本発明の実施の形態について図を参照して説明する。図1(A)及び(B)、図2(A)及び(B)において、5は、全体として本発明の実施の形態における形状選別装置を示す。
【0032】
この形状選別装置5は、入口シュートとなる上流側に配置されて右側から左側の供給方向へ選別対象の農産物を供給する供給コンベア2と、出口シュートとなる下流側に配置されて下方から上方の搬送方向へ選別後の農産物を搬送する搬送コンベア3と、供給コンベア2及び搬送コンベア3の間に配置され、搬送コンベア3と同様に下方から上方の排出方向へ選別対象ではない大きさの農産物等を排出する排出コンベア4と互いに組み合わされて用いられ、当該形状選別装置5が排出コンベア4の真上に配置されている。
【0033】
供給コンベア2は、供給コンベアモータ6によりベルト7を供給方向へ回転駆動することにより、当該ベルト7の上に置かれた農産物、例えば馬鈴薯を形状選別装置5に供給する。
【0034】
また、搬送コンベア3は、図示しない搬送コンベアモータによりベルト8を搬送方向へ回転駆動することにより、形状選別装置5によって選別された後の一定の大きさ以上の農産物をベルト8を介して搬送する。
【0035】
さらに、排出コンベア4は、図示しない排出コンベアモータによりベルト9を排出方向へ回転駆動することにより、形状選別装置5によって選別された後に下方に落とされた選別対象外の大きさでなる農産物や、その他の土塊等をベルト9を介して排出する。
【0036】
ところで、図3に示すように、形状選別装置5により選別される農産物として一般的に馬鈴薯100があり、この馬鈴薯100は球を押しつぶしたような形状を有し、その寸法は長さPL>幅PW>厚さPTとなっている。
【0037】
すなわち形状選別装置5は、供給コンベア2のベルト7を介して運ばれてくる複数の農産物たとえば馬鈴薯100のうち、所定の大きさ(厚さPT)よりも大きいものだけを選別し、その選別した複数の馬鈴薯100を搬送コンベア3のベルト8を介して搬送し得るようになされている。
【0038】
その一方、形状選別装置5は、所定の大きさ(厚さPT)よりも小さい馬鈴薯100の規格外品や土塊、小石等を当該形状選別装置5の下方に配置された排出コンベア4のベルト9を介して排出し得るようになされている。
【0039】
(2)形状選別装置の具体的構成
形状選別装置5(図1、図2)は、3個の選別ユニット5A〜5Cが供給方向に沿って並列に並べられ、3個の選別ユニット5D〜5Fが供給方向に沿って並列に並べられ、かつ、選別ユニット5A〜5Cと選別ユニット5D〜5Fとが互いの一端部を対向させた状態で配置された構成を有する。
【0040】
但し、形状選別装置5は、6個の選別ユニット5A〜5Fによって構成されるだけではなく、能率、選別の量、及び農産物の種類等に応じた、その他種々の個数の選別ユニット5によって構成されても良く、例えば選別ユニット5の数を多くした場合、選別機会を増大させることが出来るので、一段と正確な選別結果を得ることができるようになされている。
【0041】
また形状選別装置5は、選別ユニット5A〜5Cの一端と、選別ユニット5D〜5Fの一端とが向かい合ったほぼ中間部分に駆動機構11が設けられ、当該駆動機構11には動力を供給するための駆動モータ10が取り付けられている。
【0042】
従って形状選別装置5は、駆動モータ10及び駆動機構11を介して選別ユニット5A〜5C及び選別ユニット5D〜5Fを供給方向へ回転駆動させることにより、選別ユニット5A〜5C及び選別ユニット5D〜5Fの上を転がりながら乗り継がれて移動する複数の馬鈴薯100を選別しながら搬送コンベア3へ受け渡すようになされている。
【0043】
なお形状選別装置5は、馬鈴薯100の供給側である供給コンベア2のベルト7上に載置されるように中央供給ガイド部12が設けられ、かつベルト7上に載置されるように右供給ガイド部13及び左供給ガイド部14が設けられている。
【0044】
これにより形状選別装置5は、ベルト7上で運ばれてくる複数の馬鈴薯100が右供給ガイド部13及び左供給ガイド部14によってベルト7上から落ちずに、かつ、中央供給ガイド部12によって駆動機構11に衝突することなく当該形状選別装置5の選別ユニット5A及び選別ユニット5Dへ導かれるようになされている。
【0045】
(2−1)選別ユニットの構成
次に形状選別装置5を構成している最小ユニットである選別ユニット5A〜5Fについて説明するが、選別ユニット5A〜5Fは全て同一構造であるため、説明の便宜上、選別ユニット5Aについてのみ図4(A)〜(D)を用いて説明し、残りの説明は省略する。なお、図4(A)〜(D)においては、見易さの観点から本来隠れ線で表示されるべき線についても実線で表現している。
【0046】
図4(A)〜(D)に示すように、選別ユニット5Aは、互いに平行な2本の選別軸21、22が一対となり、その一端が軸受23、24によって軸支されると共に、その他端が軸受25、26によって軸支されている。この軸受23〜26については、本来は隠れ線で表現されるものである。
【0047】
この選別軸21(22)は、図5に示すように、その軸断面が六角形状の回転軸21A(22A)、その回転軸21A(22A)の通過孔として六角形孔30Aがボス30Bに形成された当該ボス30Bと一体構造のゴム状の弾性体でなる複数の選別円盤30(この場合、例えば11個)、及び複数の選別円盤30の間にそれぞれ配置された弾性部材としての圧縮コイルばね34(この場合、10個)によって構成されている。
【0048】
選別円盤30は、全体として円形状でなり、選別軸21における断面六角形状の回転軸21Aが当該選別円盤30のボス30Bの六角形孔30Aを通過するようになされており、当該選別円盤30が回転軸21A上を軸方向へ摺動し得るようになされている。
【0049】
すなわち選別円盤30と、回転軸21Aとは、その嵌合部分の断面が多角形状であれば良く、これにより選別円盤30が回転軸21Aの周方向へ回転してしまうことを防止し、かつ回転軸21Aと選別円盤30とが一体となって回転動作することを保証し得るようになされている。
【0050】
また、隣接する2つの選別円盤30の間に配置された圧縮コイルばね34は、全て同じ長さであり、かつ全て同じばね定数を持ち、隣接する選別円盤30の全ての間隔が等しくなっている。因みに、圧縮コイルばね34のばね定数は適宜定めることができる。
【0051】
なお、選別円盤30の材質、形状及び構造としては、これに限るものではなく、図6(A)〜図6(C)に示すような選別円盤31、32及び33等が考えられる。
【0052】
選別円盤31(図6(A))は、選別円盤30のようなボス30Bが設けられていないものの、その分だけ全体の厚さが増した構成を有し、その中央部には、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔31Aが形成されている。
【0053】
選別円盤32(図6(B))は、選別円盤30のようなボス30Bが設けられておらず、かつ、円形状の中心部から外周部へ向かって次第に細くなるような構成を有し、その中央部には、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔32Aが形成されている。
【0054】
選別円盤33(図6(C))は、全体の外形が6角形状でなり、その中央部には、選別円盤30のボス30Bと同様のボス33Bが設けられ、かつ、そのボス33Bに対して、選別軸21における断面六角形状の回転軸21Aが通過するための六角形孔33Aが形成されている。
【0055】
このように選別円盤30(図4)の形状及び構造としては、上述した選別円盤31、32及び33のような種々の形状及び構造が考えられ、これら以外にもロール形、多角形等のその他の形状及び構造であってもよい。
【0056】
また選別ユニット5A(図4)は、 2本の選別軸21、22の芯間に合わせてはめ込まれた軸受27、28(本来は隠れ線で表示されるもの)と一体化されているスライドガイド35を有する。
【0057】
選別軸21、22は、一方の先端部分において、回転軸21A、22Aがその内部に挿入された六角パイプでなる中空部材21B、22Bを有し、これにより中空部材21B、22Bが回転軸21A、22A上を軸方向へ摺動し得るようになされている。
【0058】
中空部材21B、22Bは、その先端に加工が施されており、これにより当該中空部材21B、22Bが回転自在にスライドガイド35の軸受27、28で支持されるようになされている。
【0059】
スライドねじ軸29は、その両端がプレート61、62に対し、回転自在に軸受で支持されており、当該スライドねじ軸29の先端にはユーザが回転動作するためのハンドル36が取り付けられている。
【0060】
一方、スライドガイド35には、2本の選別軸21、22間の中心部分に雌ねじが設けられ、そこにスライドねじ軸29の雄ねじが係合されている。
【0061】
従って、ハンドル36を介してスライドねじ軸29が回転された場合、図7及び図8に示すように、スライドガイド35が移動し、回転軸21A、22Aを覆っている中空部材21B、22Bが当該スライドガイド35と共に当該回転軸21A、22A上を摺動する。
【0062】
因みに選別ユニット5Aでは、図9に示すように、選別ユニット5Aにおける選別軸21に複数取り付けられた隣接する2枚の選別円盤30と、当該選別5Aにおける選別軸22に複数取り付けられた隣接する2枚の選別円盤30とによって形成される幅MWでなる選別空間SSを介して馬鈴薯100(図3)を選別するようになされている。
【0063】
この場合、選別ユニット5Aでは、2枚の選別円盤30の幅の幅によって決定される選別幅MWが馬鈴薯100の厚さPTよりも大きければ(選別幅MW>厚さPT)、その厚さPTよりも小さい馬鈴薯100だけを選別空間SSから落下させて排出し、その厚さPTよりも大きい馬鈴薯100だけを選別するようになされている。
【0064】
このような構成の選別ユニット5Aでは、中空部材21B、22Bにより選別円盤30が押され、10個の圧縮コイルばね34がその付勢力に反してそれぞれ均等に縮むことにより、複数の選別円盤30を全体的に移動させ、その結果、図7(A)及び(B)に示したように、11個の選別円盤30間の空隙すなわち選別空間SSの幅MW1が幅MW2へ均等に狭くなる。この際、選別ユニット5Aでは、ユーザによるハンドル36の回転量に応じて11個の選別円盤30間の空隙を任意に調整して変化させ得るようになされている。
【0065】
なお、この選別ユニット5Aでは、選別空間SSの幅MW1の最大値が50mm、幅MW2の最小値が35mm、圧縮コイルばね34の長さが24mm〜39mmであり、スライドガイド35の最大移動距離は150mmとなっている。但し、これらの値は選別ユニット5Aのサイズや、対象とすべき農産物の種類に応じて適宜変更することができる。
【0066】
なおスライドガイド35は、その左右両側にスライドローラ37、38が設けられ、かつ当該スライドガイド35の下方にスライドローラ39が設けられている。また、これらのスライドローラ37、38及び39と対向した筐体40の対応箇所には、側面レールガイド41、42及び下面レールガイド43が設けられている。
【0067】
従ってスライドガイド35は、ハンドル36が回転されたとき、スライドローラ37、38及び39が側面レールガイド41、42上、及び下面レールガイド43上を転がり、当該スライドガイド35がプレート61、62間を滑らかに移動し得るようになされている。
【0068】
さらに選別ユニット5Aは、選別軸21(22)の下方に設けられたスクレーパパイプ軸44に対して複数のスクレーパ45(この場合、10個)が設けられている。この複数のスクレーパ45は、選別軸21の複数の選別円盤30の間で当該複数の選別円盤30と互い違いに配置されている。
【0069】
このスクレーパパイプ軸44は、その端部がプレート62に軸支されたスクレーパ軸44Aをその内部に挿通した構成を有し、スクレーパパイプ軸44がスクレーパ軸44A上を軸方向へ摺動し得るようになされている。
【0070】
またスクレーパパイプ軸44には、複数のスクレーパ45の間にそれぞれスクレーパばね46が取り付けられている。これら複数のスクレーパばね46は全て同じ長さであり、かつ全て同じばね定数を持ち、隣接する複数のスクレーパ45同士の間隔と、隣接する複数の選別円盤30同士の間隔とほぼ同じ距離となっている。
【0071】
なお、複数のスクレーパ45は、スクレーパパイプ軸44が回転することなく、当該複数のスクレーパ45と選別軸21の圧縮コイルばね34とが所定の間隔だけ離れた状態で配置されたことにより、選別時に圧縮コイルばね34に付着した泥等をスクレーパ45により除去し得るようになされている。
【0072】
そして、これら複数のスクレーパ45は、スライドガイド35の移動に伴って複数の選別円盤30が全体的に移動した際、中空部材21B、22Bがスライドガイド35と共に回転軸21A、22A上を摺動すると共に、スクレーパパイプ軸44がスクレーパ軸44A上を摺動する。
【0073】
従って選別ユニット5Aは、図8(A)及び(B)において、スクレーパパイプ軸44により左端のスクレーパ45が押された結果、複数のスクレーパばね46の付勢力に反してそれぞれ均等に縮むことにより、複数の選別円盤30と複数のスクレーパ45とが連動した状態で同一方向へ移動されるようになされている。
【0074】
ところで選別ユニット5Aは、上部フレーム51に対し、ちょうボルト52を介して選別ガイド板53が取り付けられており、当該選別ガイド板53よりも中空部材21B、22B側へ選別対象の馬鈴薯100が転がり進むことを防止するようになされている。
【0075】
すなわち図8(A)及び(B)に示したように選別ユニット5Aでは、複数の選別円盤30が全体的に移動された際、ちょうボルト52が緩められて選別ガイド板53が選別円盤30側へ移動させられた後に、ちょうボルト52が締め付けられるようになされている。
【0076】
なお、選別軸21、22(図4)は、その他端部において選別軸駆動歯車47、48に取り付けられており、また選別軸駆動歯車47、48の間には選別軸21、22を同一方向へ回転させるための中間歯車49が当該選別軸駆動歯車47、48と係合するように取り付けられている。
【0077】
図10及び図11に示すように、形状選別装置5における供給ガイド板12(図1)の内側に配置された駆動機構11は、選別軸駆動モータ10の駆動スプロケット54及びローラチェーン57を介して伝達歯車55の駆動伝達軸56を回転駆動することによって、中間歯車49、選別軸駆動歯車47、中間歯車49、選別軸駆動歯車48、……、を矢印方向へ回転駆動する。
【0078】
この場合の駆動機構11では、選別軸駆動モータ10における駆動スプロケット54のスプロケット比、伝達歯車55の歯車比がいずれも1:1となるように設定されている。これにより駆動機構11は、選別軸駆動モータ10の出力回転数がそのまま選別軸駆動歯車47、48、……、の回転数となるため、回転数の変更可能なインバータ付きモータを使用している。但し、これに限るものではないことは言うまでもない。
【0079】
なお、駆動機構11は、選別円盤30の直径、処理量、農産物の種類等によるが、選別軸21、22の回転数を50rpm前後とすることが多い。
【0080】
(3)動作及び効果
以上の構成において、形状選別装置1の選別ユニット5Aは、ハンドル36に対する回転操作により複数の選別円盤30を回転軸21A、22Aの軸方向へ摺動させながら移動させることができるので、選別円盤30間の空隙すなわち選別空間SSの幅MW1を幅MW2(図7)に変化させることができる。
【0081】
このとき、選別ユニット5Aでは、ユーザによるハンドル36の回転量に応じて11個の選別円盤30間の空隙を任意に調整し得ると共に、比較的入手容易な全て同じばね定数でなる圧縮コイルばね34が選別円盤30間に設けられているので、圧縮コイルばね34の付勢力により選別円盤30間の空隙を全て均等にした状態で位置決めすることができる。
【0082】
また選別ユニット5Aは、複数の選別円盤30と回転軸21A、22Aとの嵌合部分の断面が多角形状(この場合、六角形状)とされたことにより、駆動機構11により選別軸21、22が回転駆動されたことに対して、選別軸21、22の回転軸21A、22Aと選別円盤30とが一体に回転動作し、農産物を供給側から搬送・排出側へ確実に受け渡すことができる。
【0083】
さらに選別ユニット5Aは、複数の選別円盤30間にそれぞれスクレーパ45が配置され、選別円盤30の移動と連動してスクレーパ45も同一方向へ移動させることができるので、選別円盤30の移動前後に拘わらず、圧縮コイルばね34に付着した異物をスクレーパ45によって確実に除去することができる
【0084】
形状選別装置1では、このような選別ユニット5A〜5Fを最小ユニットとして複数組み合わせることができるので、能率、量、農産物の種類等に応じて当該選別ユニット5A〜5Fを適宜組み合わせることにより、希望能率に対して容易に対応することができる。
【0085】
以上の構成によれば、形状選別装置1は、簡易な構成でありながら、選別空間SSの選別幅を迅速かつ容易に調整することができる。
【0086】
(4)他の実施の形態
なお上述の実施の形態においては、選別対象の農産物として馬鈴薯を一例として説明したが、本発明はこれに限らず、形状(大きさ)で選別できるものであれば、タマネギ、リンゴ、ミカン、オレンジ等のその他種種の農産物をその形状に応じて選別するようにしても良い。
【0087】
また上述の実施の形態においては、弾性部材として圧縮コイルばね34を用いるようにした場合について述べたが、本発明はこれに限らず、スポンジ状部材、ゴム状部材等のその他種々の弾性部材を用いるようにしても良い。
【0088】
さらに上述の実施の形態においては、選別対象の農産物を搬送コンベア3により搬送し、選別対象以外のものを排出コンベア4により排出するようにした場合について述べたが、本発明はこれに限らず、選別対象の農産物を排出コンベア4により排出し、選別対象以外のものを搬送コンベア3により搬送するようにしても良い。
【符号の説明】
【0089】
2……供給コンベア、3……搬送コンベア、4……排出コンベア、5……形状選別装置、10……選別軸駆動モータ、21、22……選別軸、29……スライドねじ軸、30、31、32、33……選別円盤、34……圧縮コイルばね、35……スライドガイド、36……ハンドル、45……スクレーパ、53……選別ガイド板、55……伝達歯車、47、48……選別軸駆動歯車、49……中間歯車、100……馬鈴薯。
【特許請求の範囲】
【請求項1】
平行に複数配置された回転軸の軸方向に選別円盤を複数配置し、隣り合う2本の前記回転軸における選別円盤間の空隙を選別空間とする農産物選別装置であって、
前記選別円盤が前記軸方向に摺動可能に取り付けられ、
前記選別円盤間に弾性部材が配置され、
前記選別円盤間の空隙が可変であるように構成された
ことを特徴とする農産物選別装置。
【請求項2】
前記弾性部材は、圧縮コイルばねである
ことを特徴とする請求項1に記載の農産物選別装置。
【請求項3】
前記回転軸において、前記選別円盤と前記回転軸との嵌合部分の断面が多角形である
ことを特徴とする請求項1又は2に記載の農産物選別装置。
【請求項4】
前記回転軸の少なくとも一端に、前記回転軸に対して摺動可能に中空部材がはめ込まれ、
前記中空部材の摺動に伴い前記選別円盤が前記軸方向に摺動するように構成された
ことを特徴とする請求項1乃至3の何れか1項に記載の農産物選別装置。
【請求項5】
前記農産物選別装置は、
スライドねじ軸の回転により前記回転軸方向に摺動するスライドガイド部を備え、
前記スライドガイド部の動作に伴って前記中空部材が摺動するように構成された
ことを特徴とする請求項4に記載の農産物選別装置。
【請求項6】
前記回転軸の下側に、前記選別円盤の摺動と連動して同一方向へ移動するようにスクレーパが配置された
ことを特徴とする請求項1乃至5の何れか1項に記載の農産物選別装置。
【請求項7】
平行な2本の回転軸の軸方向に選別円盤を複数配置し、
隣り合う前記選別円盤の空隙を選別空間とし、
前記選別円盤が上記軸方向に摺動可能に取り付けられ、
選別円盤間に圧縮コイルばねが配置され、
前記選別円盤間の空隙が前記圧縮コイルバネにより可変であるように構成された
ことを特徴とする農産物選別装置用の選別ユニット。
【請求項8】
前記農産物選別装置用の選別ユニットは、
前記回転軸の下側に、前記選別円盤の摺動と連動して同一方向へ移動するようにスクレーパが配置された
ことを特徴とする請求項7に記載の農産物選別装置用の選別ユニット。
【請求項1】
平行に複数配置された回転軸の軸方向に選別円盤を複数配置し、隣り合う2本の前記回転軸における選別円盤間の空隙を選別空間とする農産物選別装置であって、
前記選別円盤が前記軸方向に摺動可能に取り付けられ、
前記選別円盤間に弾性部材が配置され、
前記選別円盤間の空隙が可変であるように構成された
ことを特徴とする農産物選別装置。
【請求項2】
前記弾性部材は、圧縮コイルばねである
ことを特徴とする請求項1に記載の農産物選別装置。
【請求項3】
前記回転軸において、前記選別円盤と前記回転軸との嵌合部分の断面が多角形である
ことを特徴とする請求項1又は2に記載の農産物選別装置。
【請求項4】
前記回転軸の少なくとも一端に、前記回転軸に対して摺動可能に中空部材がはめ込まれ、
前記中空部材の摺動に伴い前記選別円盤が前記軸方向に摺動するように構成された
ことを特徴とする請求項1乃至3の何れか1項に記載の農産物選別装置。
【請求項5】
前記農産物選別装置は、
スライドねじ軸の回転により前記回転軸方向に摺動するスライドガイド部を備え、
前記スライドガイド部の動作に伴って前記中空部材が摺動するように構成された
ことを特徴とする請求項4に記載の農産物選別装置。
【請求項6】
前記回転軸の下側に、前記選別円盤の摺動と連動して同一方向へ移動するようにスクレーパが配置された
ことを特徴とする請求項1乃至5の何れか1項に記載の農産物選別装置。
【請求項7】
平行な2本の回転軸の軸方向に選別円盤を複数配置し、
隣り合う前記選別円盤の空隙を選別空間とし、
前記選別円盤が上記軸方向に摺動可能に取り付けられ、
選別円盤間に圧縮コイルばねが配置され、
前記選別円盤間の空隙が前記圧縮コイルバネにより可変であるように構成された
ことを特徴とする農産物選別装置用の選別ユニット。
【請求項8】
前記農産物選別装置用の選別ユニットは、
前記回転軸の下側に、前記選別円盤の摺動と連動して同一方向へ移動するようにスクレーパが配置された
ことを特徴とする請求項7に記載の農産物選別装置用の選別ユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−187494(P2012−187494A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−52546(P2011−52546)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000231981)日本甜菜製糖株式会社 (58)
【出願人】(510243528)サークル機工株式会社 (5)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000231981)日本甜菜製糖株式会社 (58)
【出願人】(510243528)サークル機工株式会社 (5)
【Fターム(参考)】
[ Back to top ]