
追尾情報管理装置、追尾情報管理システム及びレーダ装置
【課題】異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、レーダアンテナが取得したエコーに基づいて得られる追尾情報を管理する追尾情報管理装置に関する。
【背景技術】
【0002】
従来から、船舶の衝突予防、人命安全の観点から、各種の航行支援装置が開発されている。このような航行支援装置として、例えばTT(Target Tracking:目標追尾)機能を備えたレーダ装置等が知られている。ここでTT機能とは、簡単に説明すると、過去のレーダ映像の推移に基づいて自船周囲に存在する物標の位置及び速度ベクトルを検出するものである。特許文献1は、このTT機能を備えたレーダ装置を2つ備えた構成を開示する。
【0003】
特許文献1が開示するレーダ装置では、一方のレーダ装置が取得した情報を他方のレーダ装置で表示する構成が開示されている。例えばクラッタ等の影響によって一方のレーダ装置においてTT情報が適切に取得できなくなった場合、ユーザは、他方のレーダ装置に表示されたターゲットを選択することで、対応するターゲットを一方のレーダ装置に表示することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−122063号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1の構成では、ターゲットが2つのレーダ装置で統一された表示となっていない。そのため、一方のレーダ装置で適切に表示されないターゲットが他方のレーダ装置のどのターゲットに対応するかを即座に判断することができなかった。
【0006】
本発明は以上の事情に鑑みてされたものであり、その目的は、異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0008】
本発明の第1の観点によれば、以下の構成の追尾情報管理装置が提供される。即ち、この追尾情報管理装置は、受信部と、判断部と、ID付与部と、送信部と、を備える。前記受信部は、第1レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第1レーダ装置から受信するとともに、第2レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第2レーダ装置から受信する。前記判断部は、前記第1レーダ装置から受信した目標エコーが示す物標と、前記第2レーダ装置から受信した目標エコーが示す物標と、が同一であるか否かを判断する。前記ID付与部は、前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。前記送信部は、前記ID付与部が付与したIDを前記第1レーダ装置及び前記第2レーダ装置に送信して、前記第1レーダ装置に表示される目標エコーと、前記第2レーダ装置に表示される目標エコーと、が同じ物標を示すか否かを分かるようにする。
【0009】
これにより、同一の物標を示す目標エコーに同じIDを付与することができる。そのため、同一の物標を示す目標エコーを、異なるレーダ装置間でも同一の表示態様(同じ文字又はマーク等)で表示することができる。従って、整合のとれた情報を同作業を行う複数のユーザに提供することができる。
【0010】
前記の追尾情報管理装置においては、前記判断部は、目標エコーの位置、速さ、及び針路のうち少なくとも1つを利用して、目標エコーが示す物標が同一であるか否かを判断することが好ましい。
【0011】
これにより、目標追尾を行うことで取得可能なデータを利用して、目標エコーが示す物標が同一であるか否かを判断することができる。従って、物標の同一性を判断するために特別なデータを取得する必要がないので、処理を簡単にすることができる。
【0012】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、この追尾情報管理装置は、データ推定部を備える。前記データ推定部は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーのデータに基づいて物標のデータを推定する。前記送信部は、前記データ推定部が推定したデータを、当該物標を検出したレーダ装置に送信する。
【0013】
これにより、複数のレーダ装置が取得した複数のデータに基づいた推定が可能であるので、物標のデータを精度良く推定できる。
【0014】
前記の追尾情報管理装置においては、前記データ推定部は、複数の目標エコーのデータを平均して、物標のデータを推定することが好ましい。
【0015】
これにより、データ推定部が行う処理を簡単にしつつ、物標のデータを精度良く推定できる。
【0016】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、レーダアンテナ毎に優先順位が設定されている。前記データ推定部は、優先順位に基づいて決定されたレーダアンテナによって得られた目標エコーのデータを、物標のデータの推定値とする。
【0017】
これにより、例えば高性能なレーダアンテナや設置条件の良いレーダアンテナの優先順位を高くすることで、高性能なレーダアンテナが利用される機会を多くすることができる。その結果、物標のデータを精度良く推定できる。
【0018】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、レーダ装置が追尾中の目標エコーが当該レーダ装置の物標検出可能範囲から外れる旨の通知を受けたときに、同一の物標を追尾中の他のレーダ装置があるか否かを判断する。同一の物標を追尾中のレーダ装置がない場合は、当該物標を検出可能なレーダ装置に追尾を開始させる指示を行う。
【0019】
これにより、目標エコーの追尾の引継ぎを行うことができる。特に、本発明の構成では、同一の物標を示す目標エコーに同じIDを付与することができるので、レーダ装置間での追尾の引継ぎを円滑に行うことができる。
【0020】
前記の追尾情報管理装置においては、前記ID付与部がレーダ装置内に設けられることが好ましい。
【0021】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、システム全体の構成をコンパクトにすることができる。
【0022】
本発明の第2の観点によれば、前記の追尾情報管理システムと、レーダ装置と、を備える追尾情報管理システムが提供される。
【0023】
これにより、前記の効果を発揮できる追尾情報管理システムが実現できる。
【0024】
ただし、前記の追尾情報管理システムは、前記の追尾情報管理装置を備えたレーダ装置と、他のレーダ装置と、を備える構成とすることができる。
【0025】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、追尾情報管理システムの構成をコンパクトにすることができる。
【0026】
前記の追尾情報管理システムにおいては、前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、当該目標エコーが選択されたことが他方のレーダ装置に通知されることが好ましい。
【0027】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、他のユーザが注目した目標エコーを直感的かつ即座に把握することができる。
【0028】
前記の追尾情報管理システムにおいては、前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、選択された目標エコーの数値情報が、一方のレーダ装置及び他方のレーダ装置の両方で表示されることが好ましい。
【0029】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、他のユーザが注目した目標エコーを数値情報とともに把握することができる。従って、例えば自機と衝突の可能性がある目標エコーを速度及び針路等とともに知らせることができるので、当該目標エコーへの対応を即座に行うことができる。
【0030】
本発明の第3の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、レーダアンテナと、取得部と、通信部と、表示部と、を備える。前記取得部は、前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する。前記通信部は、前記取得部が取得した目標エコーを、目標エコーに関するデータの管理を行う追尾情報管理装置に送信するとともに、同一の物標を示す目標エコーに同一のIDが割り当てられるようにID付与部によって付与されたIDを前記追尾情報管理装置から受信する。前記表示部は、前記追尾情報管理装置から受信したIDに基づいた表示態様で目標エコーを表示する。
【0031】
これにより、自機及び他のレーダ装置の目標エコーが示す物標が同一であれば、同一の表示態様(同じ文字又はマーク等)で当該目標エコーを表示することができる。これにより、レーダ装置間で整合のとれた情報を同作業を行う複数のユーザに提供することができる。
【0032】
ただし、前記のレーダ装置は、以下の構成とすることもできる。即ち、このレーダ装置は、レーダアンテナと、取得部と、判断部と、付与部と、表示部と、を備える。前記取得部は、前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する。前記判断部は、前記レーダアンテナにより取得された目標エコーが示す物標と、他のレーダ装置により取得された目標エコーが示す物標と、が同一であるか否かを判断する。前記ID付与部は、前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。前記表示部は、前記ID付与部が付与したIDに基づいた表示態様で目標エコーを表示する。
【0033】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、システム全体の構成をコンパクトにすることができる。
【0034】
前記のレーダ装置においては、前記表示部は、自機が取得した目標エコーのみを表示する表示モードを有することが好ましい。
【0035】
これにより、自機が現在検出中の物標を容易に把握することができる。また、他のレーダ装置のみが検出した物標が多数表示されて表示部が見にくくなることを防止できる。
【0036】
前記のレーダ装置においては、前記表示部は、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードを有することが好ましい。
【0037】
これにより、複数のレーダ装置を有効に活用して、自機の周囲の情報をより詳細に把握することができる。
【0038】
前記のレーダ装置においては、前記表示部は、自機のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示することが好ましい。
【0039】
これにより、ユーザは、注目する目標エコーが、自機のみが取得した目標エコーか、そうでない目標エコー(自機及び他機が取得した目標エコーや他機のみが取得した目標エコー)か、を素早く把握することができる。
【0040】
前記のレーダ装置においては、以下の構成とすることが好ましい。即ち、自機のみが取得した目標エコーには、自機によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるID(ローカルID)を少なくとも付加して表示する。一方、そうでない目標エコーには、前記ID付与部によって付与されるID(グローバルID)を少なくとも付加して表示する。
【0041】
これにより、ユーザは、目標エコーに付与されたIDとともに、注目する目標エコーが、自機のみが取得した目標エコーか、そうでない目標エコーかを把握することができる。
【0042】
前記のレーダ装置においては、自機及び他のレーダ装置の両方で検出されている目標エコーが自機において選択された際に、当該目標エコーが選択されたことを他のレーダ装置に通知することが好ましい。
【0043】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、注目した目標エコーを直感的かつ即座に他のユーザに把握させることができる。
【0044】
前記のレーダ装置においては、自機及び他のレーダ装置の両方で検出されている目標エコーが当該自機において選択された際に、選択された目標エコーの数値情報を前記表示部に表示するとともに、他のレーダ装置に通知を行って、当該目標エコーの数値情報を表示させることが好ましい。
【0045】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、注目した目標エコーを数値情報とともに他のユーザに把握させることができる。従って、例えば自機と衝突の可能性がある目標エコーを速度及び針路等とともに知らせることができるので、当該目標エコーへの対応を即座に行うことができる。
【0046】
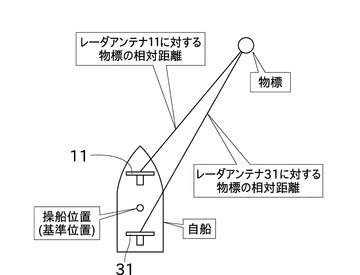
前記のレーダ装置においては、以下の構成とすることが好ましい。即ち、目標エコーの相対位置の基準位置が設定されており、レーダ装置は、自機が備える前記レーダアンテナの位置と、前記基準位置と、に基づいて当該基準位置に対する目標エコーの相対位置を算出する。
【0047】
これにより、目標エコーの相対位置の基準位置がレーダ装置間でズレないので、例えば物標の同一性をより的確に判断することができる。
【0048】
前記のレーダ装置においては、自機が備える前記レーダアンテナの地球基準の位置に基づいて目標エコーの地球基準の位置を算出することが好ましい。
【0049】
これにより、基準位置を設定することなく、レーダアンテナの設置箇所の違いに基づく目標エコーの位置ズレを防止することができる。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施形態に係るTT情報管理システムの構成を示すブロック図。
【図2】物標の相対位置の基準位置を説明する図。
【図3】TT情報管理サーバの構成を示すブロック図。
【図4】第1レーダ装置及び第2レーダ装置の物標検出可能範囲を示す図。
【図5】各物標に付与されたIDを示す表。
【図6】判断部の判断基準の一例を示す表。
【図7】データ推定部の推定例を示す表。
【図8】従来例における目標エコーの表示例を示す図。
【図9】本実施形態の第1表示モードにおける目標エコーの表示例を示す図。
【図10】本実施形態の第2表示モードにおける目標エコーの表示例を示す図。
【図11】第1レーダ装置と第2レーダ装置の表示部が連動することを示す図。
【図12】追尾情報の引継ぎが必要な状況を説明する図。
【発明を実施するための形態】
【0051】
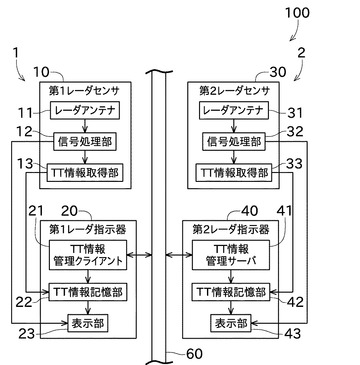
次に、図面を参照して本発明の実施の形態を説明する。図1は、本発明の一実施形態に係るTT情報管理システム(追尾情報管理システム)100の構成を示すブロック図である。図2は、物標の相対位置の基準位置を説明する図である。
【0052】
図1に示すTT情報管理システム100は、機器間の相互通信を可能とする有線のLAN60を介して互いに接続された第1レーダ装置1と、第2レーダ装置2と、から構成されている。なお、TT情報管理システム100を構成するレーダ装置の数は2機に限られず、より多くのレーダ装置によって構成されていても良い。
【0053】
初めに、第1レーダ装置1及び第2レーダ装置2について説明する。なお、第1レーダ装置1と第2レーダ装置2は、一部(後述のTT情報管理クライアント21を備えるかTT情報管理サーバ41を備えるか)が異なるだけであるので、以下では、代表して第1レーダ装置1について説明し、第2レーダ装置2の構成の説明を省略することがある。
【0054】
第1レーダ装置1は、電波の送信を行うとともに、物標からの反射波を受信して、当該反射に適宜の演算を行うことで物標の位置を検出する装置である。第1レーダ装置1は、具体的には、図1に示すように、第1レーダセンサ10と、第1レーダ指示器20と、を備える。
【0055】
第1レーダセンサ10は、前記電波の送受信及び信号処理を行うユニットである。第1レーダセンサ10は、レーダアンテナ(第1レーダアンテナ)11と、信号処理部12と、TT情報取得部(取得部)13と、を備える。
【0056】
レーダアンテナ11は、指向性の強いパルス状のマイクロ波の送信を行い、当該マイクロ波が物標に反射して戻ってきたエコー(反射波)を受信するように構成されている。また、レーダアンテナ11は、所定の回転速度で回転しながら、電波の送受信を繰り返し行うように構成されている。以上の構成で、水平面内を、自船を中心として360°にわたってスキャンすることができる。
【0057】
なお、このパルスレーダに代えて、CW(continuous wave)レーダやパルスドップラーレーダを用いても良い。また、上記の構成に代えて、レーダアンテナを回転させない構成のレーダ装置を用いても良い。例えば、全周方向にアンテナ素子を有する構成のレーダ装置や、前方等の特定の方向のみを探知するレーダ装置等は、レーダアンテナを回転させる必要がない。
【0058】
信号処理部12は、レーダアンテナ11がマイクロ波を送信したタイミングと、エコーを受信したタイミングとの時間差から、物標までの距離を取得する。また、信号処理部12は、前記エコーを受信したときのレーダアンテナ11の向き(マイクロ波の送受信方向)によって、エコー源が存在する方向を取得する。信号処理部12は、このようにしてレーダ映像を作成し、TT情報取得部13及び第1レーダ指示器20へ出力する。
【0059】
TT情報取得部13は、TT(目標追尾)機能を実現するためのものである。このTT(又はARPA)機能は公知であるので詳細な説明は省略するが、レーダ映像に基づいて目標エコーの位置を自動的に検出・捕捉するとともに、レーダ映像の時間推移に基づいて目標エコーの移動を追尾することにより物標(目標エコー)の速度ベクトルを推定するものである。
【0060】
なお、TT情報取得部13が取得した物標の位置は、レーダアンテナ11に対する相対的な情報である。そのため、図2に示すように、レーダアンテナの設置位置が異なる場合、物標が同じであっても、第1レーダ装置1のレーダアンテナ11が取得する場合と、第2レーダ装置2のレーダアンテナ31が取得する場合と、で物標(目標エコー)の相対位置が異なってしまう。そのため、TT情報取得部13は、相対位置の基準位置を変更する処理を行う。本実施形態では、目標エコーの相対位置の基準位置として、操船位置(操船操作を行う位置)が設定されており、各レーダ装置では、この操船位置を基準として相対位置が求められる。以上のようにして得られた目標エコーの相対位置及び速度を示す情報(追尾情報、TT情報)は、第1レーダ指示器20へ出力される。なお、物標の相対位置の基準位置は、一意に定まる点が指定されていれば、操船位置でなくても良い。また、第2レーダ装置2のTT情報取得部33も同様に、信号処理装置32が生成したレーダ映像に基づいて、相対位置の基準位置を変更する処理を行う。
【0061】
なお、第1レーダセンサ10は、以下のようにして、物標の地球基準の位置(絶対位置)を取得することもできる。即ち、予め、GPS受信機が設置される位置と、レーダアンテナ11が設置される位置と、の位置関係を求めて記憶しておく。これにより、この位置関係と、GPS受信機が検出した絶対位置と、に基づいて、レーダアンテナ11の絶対位置を求めることができる。また、レーダアンテナ11と物標の位置関係は、エコーに基づいて上記のようにして求めることができる。以上により、物標の絶対位置を求めることができる。なお、絶対位置を求める場合でも、相対位置を求める場合と同様に、位置を示す情報が第1レーダ指示器20へ送信される。また、第2レーダ装置2も同様にして、物標の絶対位置を求めることができる。
【0062】
第1レーダ指示器20は、TT情報管理クライアント(通信部)21と、TT情報記憶部22と、表示部23と、を主要な構成として備える。
【0063】
TT情報管理クライアント21は、TT情報をTT情報管理システム100で管理するときのクライアントとして機能する。一方、第2レーダ装置2には、このTT情報管理クライアント21の代わりにTT情報管理サーバ(追尾情報管理装置)41が設けられている。TT情報管理サーバ41は、TT情報をTT情報管理システム100で管理するときのサーバとして機能する。従って、例えば3機以上のレーダ装置でTT情報管理システム100が構成される場合、そのうちの1機がTT情報管理サーバを備え、残りがTT情報管理クライアントを備える構成となる。なお、本実施形態ではTT情報管理サーバ41がレーダ装置内に設けられているが、TT情報管理サーバ41をレーダ装置外に配置し、全てのレーダ装置がTT情報管理クライアントを備える構成とすることもできる。また、TT情報管理クライアント21とTT情報管理サーバ41とは固定である必要はなく、TT情報管理クライアントの機能とTT情報管理サーバの機能とを切り替えることができるTT情報管理部を設け、TT情報管理サーバとして動作する機器が故障した場合であっても、他のTT情報管理部が代替サーバとして動作できるような構成にしてもよい。なお、このTT情報管理クライアント21及びTT情報管理サーバ41が行う処理の詳細は後述する。
【0064】
TT情報記憶部22は、TT情報取得部13が取得したTT情報を記憶する。そして、TT情報取得部13が新しい目標エコーを取得した場合には、当該目標エコーのTT情報がTT情報記憶部22に新しく登録される。一方、TT情報記憶部22に既にTT情報が登録されている目標エコーについては、当該新しいデータが得られる度に、TT情報記憶部22に記憶されている内容が更新される。また、第2レーダ装置2が備えるTT情報記憶部42は、前記TT情報取得部33が取得したTT情報を記憶し、TT情報記憶部22と同様にデータの更新等を行う。
【0065】
表示部23は、カラー表示可能な液晶ディスプレイとして構成される。表示部23には、前記信号処理部12が生成したレーダ映像と、TT情報記憶部22の記憶内容と、が入力される。そして、表示部23は、レーダ映像とTT情報とを重畳して表示することができる。
【0066】
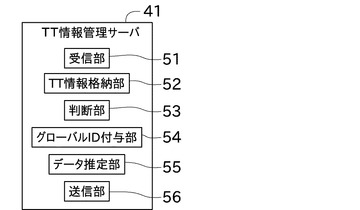
次に、主にTT情報管理クライアント21及びTT情報管理サーバ41が行う処理の流れを説明して、TT情報が管理される構成について説明する。図3は、TT情報管理サーバ41の構成を示すブロック図である。図4は、第1レーダ装置1及び第2レーダ装置2の物標検出可能範囲を示す図である。図5は、各物標に付与されたIDを示す表である。なお、図3に示すように、TT情報管理サーバ41は、受信部51と、TT情報格納部52と、判断部53と、グローバルID付与部(ID付与部)54と、データ推定部55と、送信部56と、を備える。
【0067】
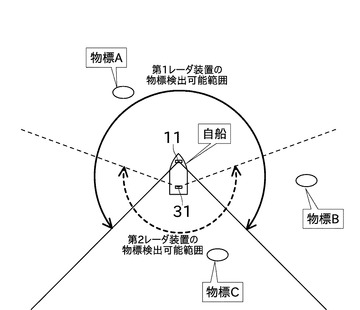
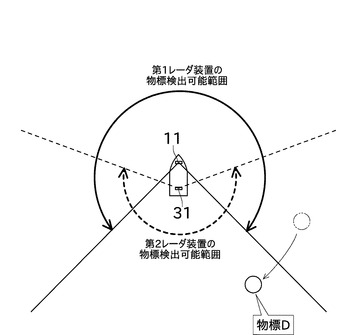
以下では、図4に示すように、自船の周りに、物標A、物標B、及び物標Cが存在する状況を考える。また、第1レーダ装置1及び第2レーダ装置2が備えるレーダアンテナは、船上の構造物等によってマイクロ波が遮られるため、物標を検出できる範囲が限られる。具体的には、レーダアンテナ11は、図4に示すように、自船の後方以外の物標を検出可能に構成されている。一方、第2レーダセンサ30が備えるレーダアンテナ(第2レーダアンテナ)31は、自船の前方以外の物標を検出可能に構成されている。
【0068】
従って、第1レーダ装置1は、物標A及び物標Bを検出可能である。一方、第2レーダ装置2は、物標B及び物標Cを検出可能である。なお、以下では、第2レーダ装置2が物標B及び物標Cを検出済みであり、第1レーダ装置1が新しく物標A及び物標Bを検出したときに行われる処理を説明する。なお、以下の説明では、第1レーダ装置1が取得した物標A,Bに対応するエコーを第1目標エコーA,Bと称し、第2レーダ装置2が取得した物標B,Cに対応するエコーを第2目標エコーB,Cと称する。
【0069】
第1レーダ装置1のTT情報取得部13は、第1目標エコーA,BのTT情報をレーダ映像に基づいて求め、TT情報記憶部22へ出力する。TT情報記憶部22は、第1目標エコーA,Bを新しく登録する。このとき、新しく登録される目標エコーには、ローカルIDが付与される。ローカルIDとは、自機(ここでは第1レーダ装置1)によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるIDである。ここでは、図5に示すように、第1目標エコーAに「L11」が付与され、第1目標エコーBに「L12」が付与されたものとする。なお、このローカルIDは、他のレーダ装置のローカルIDと重複してしまうことがある。また、第2レーダ装置2が検出した物標Bに対応するエコーである第2目標エコーBには、第2レーダ装置2のローカルIDとして、既に「L21」が付与されているものとし、第2目標エコーCには、既に「L22」が付与されているものとする。
【0070】
TT情報管理クライアント21は、新しく登録された第1目標エコーA,BのTT情報をローカルIDとともにTT情報記憶部22から取得して、第2レーダ指示器40が備えるTT情報管理サーバ41へ送信する。
【0071】
TT情報及びローカルIDは、TT情報管理サーバ41の受信部51によって受信され、TT情報管理サーバ41が備えるTT情報格納部52に記憶される。このTT情報格納部52には、TT情報管理システム100を構成する全てのレーダ装置が検出した目標エコーのローカルID及びTT情報等が記憶されている。
【0072】
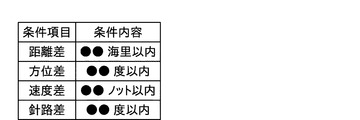
そして、TT情報管理サーバ41の判断部53は、受信部51が受信したTT情報に基づいて、受信した第1目標エコーA,Bと同一の物標が既にTT情報格納部52に登録されているか否かを判断する。この判断は、例えば図6に示す表に基づいて行われる。図6は、判断部53の判断基準の一例を示す表である。図6には、条件項目として、注目する2つの目標エコー同士の、距離差、方位差、速度差、及び針路差が設定されている。また、この表には、この条件項目に対応する条件の内容(閾値)が記述されている。判断部53は、注目する2つの目標エコーについて、例えば4つの条件項目を全て満たしたときに、これらの目標エコーが同一の物標を示していると判断する。なお、この判断方法は任意であり、例えば3つの条件項目を満たしたときに判断部53が同一の物標を示していると判断する構成であっても良い。また、この判断で用いられる条件項目は上記で示した例に限られず、例えば、目標エコーの大きさや形状(縦横比等)を用いることができる。また、それぞれの条件項目に対応する閾値は、ユーザによって変更可能となっており、状況に応じた柔軟な対応を行うことができる。
【0073】
判断部53は、このようにして目標エコーがどの物標を示しているか判断する。そして、TT情報管理サーバ41が備えるグローバルID付与部54は、同一の物標であると判断された目標エコーに対して同一のID(グローバルID)を付与する。グローバルIDは、TT情報管理システム100内で同一の物標を示す目標エコーごとに一意に割り当てられるIDであり、異なる物標を示す目標エコーには異なるIDが付与される。具体的には、第1レーダ装置1が検出した物標Aは、第2レーダ装置2の物標検出可能範囲外であるため、TT情報格納部52にはまだ登録されていない。そのため、第1目標エコーAには、新しいグローバルID(G3)が付与される。一方、第1レーダ装置1が検出した物標Bは、第2レーダ装置2によって既に検出されてTT情報格納部52に登録されているため、第1目標エコーBには、第2目標エコーBと同じグローバルID(G2)が付与される。
【0074】
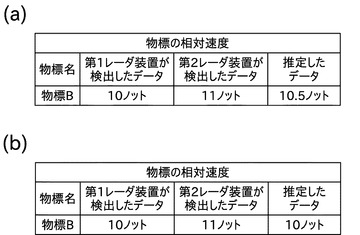
次に、受信部51のデータ推定部55は、受信したTT情報に基づいて、物標のデータ(位置、速度、針路等)の推定を行う。この推定は、同一の物標を示す目標エコーが複数存在する場合に行われる。つまり、本実施形態の例では、物標Bについて、この推定が行われる。以下、データ推定部55が行う物標のデータの推定例について、データ推定部の推定例を示す表である図7を参照して説明する。例えば、データ推定部55は、図7(a)に示すように、第1レーダ装置1が検出した速度と、第2レーダ装置2が検出した速度と、の平均をとることで物標の速度を推定することができる。また、この構成に代えて、図7(b)に示すように、予めレーダアンテナの優先順位を設定しておき、優先順位の高いレーダアンテナが取得した速度データを優先的に用いることもできる。レーダアンテナの優先順位は、レーダアンテナの性能によって定める他、レーダアンテナの設置条件に応じて定めたり、物標までの距離に応じて変化させたりしても良い。例えば、近距離の物標の場合は第1レーダ装置1の優先順位を高くし、遠距離の物標の場合は第2レーダ装置2の優先順位を高くすることもできる。また、レーダ装置が3つ以上設置される場合、各レーダ装置が検出した速度同士を比較して、他と大きく値が異なる速度を排除して信頼性が高い速度のみを用いて速度の推定を行っても良い。このように、複数のレーダ装置が取得した複数のデータに基づいて推定を行うことにより、物標の位置及び速度を精度良く推定できる。
【0075】
次に、TT情報管理サーバ41の送信部56は、グローバルID付与部54が付与したグローバルIDと、データ推定部55が推定した物標の推定位置及び推定速度と、をTT情報管理クライアント21へ返信する。
【0076】
TT情報管理クライアント21は、グローバルID及び物標の推定位置及び推定速度をTT情報記憶部22に送信して、記憶させる。このとき、TT情報取得部13が取得した位置及び速度は、データ推定部55が推定した推定位置及び推定速度によって上書きされる構成であっても良いし、残される構成であっても良い。
【0077】
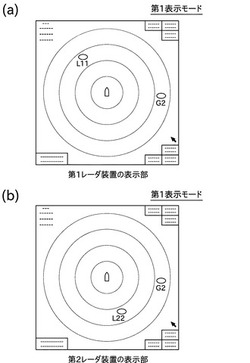
表示部23は、このようにして得られた情報に基づいた表示を行う。以下、この表示について、図8から図10までを参照して説明する。図8は、従来例における目標エコーの表示例を示す図である。図9及び図10は、本実施形態における目標エコーの表示例を示す図である。
【0078】
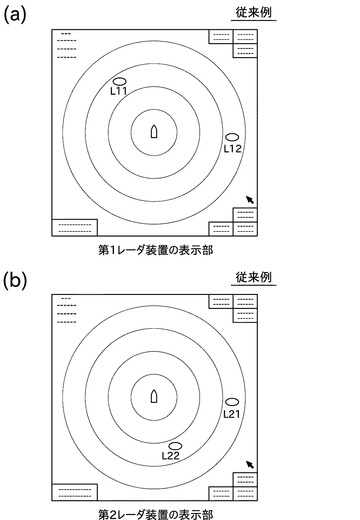
初めに、従来例における目標エコーの表示例について説明する。従来では、レーダ装置間で統一したIDが用いられていなかった(ローカルIDしか用いられていなかった)。そのため、図8に示すように、レーダ装置間では、同じ物標(物標B)を示す目標エコーであっても異なるIDが付加された表示となっていた。この場合、2つのレーダ映像に表示される目標エコーの対応関係を即座に把握することが難しかった。
【0079】
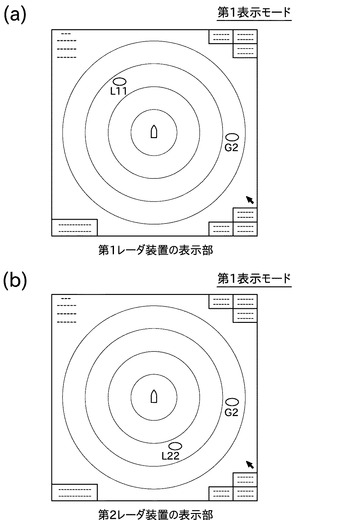
これに対し、本実施形態では、レーダ装置間で統一したIDであるグローバルIDが用いられているので、図9に示すように、同じ物標(物標B)に同じIDが付加された表示とすることができる。従って、整合のとれた情報をユーザに提供することができる。なお、本実施形態のTT情報管理システム100では、表示部23及び表示部43は、2つの表示モードを切り替えて表示することが可能である。
【0080】
第1表示モードは、図9に示すように、自機が取得した目標エコーのみを表示する表示モードである。この表示モードでは、自機が現在検出中の物標を容易に把握することができる。また、他のレーダ装置のみが検出した物標が多数表示されて表示部が見にくくなることを防止できる。
【0081】
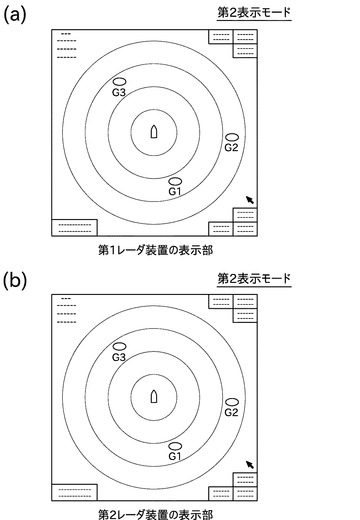
第2表示モードは、図10に示すように、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードである。この表示モードでは、複数のレーダ装置を有効に活用して、自機の周囲の情報をより詳細に把握することができる。
【0082】
また、どの目標エコーにどの種類のID(ローカルID、グローバルID、又はその両方)を付加して表示するかは、ユーザが設定することができる。例えば図9では、表示部23,43は、自レーダ装置のみが取得した目標エコー(第1レーダ装置1にとっての物標A、第2レーダ装置2にとっての物標C)については、それぞれローカルIDを付加しつつ表示している。一方、そうでない物標(両方のレーダ装置が取得した物標)である物標Bについては、それぞれグローバルIDを付加しつつ表示している。本実施形態では、このようにして、自レーダ装置のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示可能である。
【0083】
なお、この構成に代えて、例えば、全ての目標エコーについてローカルIDとグローバルIDの両方を付加して表示する構成であっても良い。更には、図10に示すように、表示部23,43が、全ての目標エコーについて、グローバルIDを付加しつつ表示する構成であっても良い。
【0084】
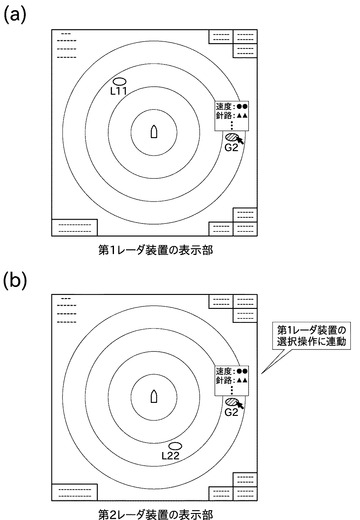
また、ユーザは、表示部23,43に表示されるポインタをマウス又はトラックボール等を用いて移動させ、クリック操作を行うことにより、所望の目標エコーを選択することができる。選択された目標エコーはハイライト表示等によって、他のエコーと異なる態様で表示される(図11を参照)。そして、表示部23,43は、選択されたエコーについての数値情報(針路、速度等)を表示する。ここで表示する数値情報は、前記データ推定部55が推定した推定位置及び推定速度であっても良いし、TT情報取得部13が取得した位置及び速度であっても良い。更には、両方の位置及び速度等を併せて表示しても良い。
【0085】
また、例えば第1レーダ装置1の表示部23で目標エコーが選択された場合、TT情報管理クライアント21は、選択された目標エコーのID等をTT情報管理サーバ41に対して通知する。第2レーダ装置2は、この通知に基づいて、表示部43に表示中の目標エコーをハイライト表示等によって、他のエコーと異なる態様に変更する。そして、表示部23と同様に、選択されたエコーについての数値情報(針路、速度等)を表示する(図11を参照)。
【0086】
なお、第2レーダ装置2の表示部43で目標エコーが選択された場合、上記と同様に、第1レーダ装置1の表示部23においても目標エコーがハイライト表示されるとともに数値情報が表示される。
【0087】
このように、本実施形態のTT情報管理システム100では、第1レーダ装置1及び第2レーダ装置2の両方で検出されている目標エコーを一方のレーダ装置で選択した際に、当該目標エコーが選択されたことが他方のレーダ装置に通知される。そして、通知を受けたレーダ装置は、その目標エコーの数値情報を表示する。
【0088】
なお、目標エコーの選択方法は、マウス及びトラックボールを用いた方法に限られず、カーソルキー及び決定キー等を用いて行っても良い。また、選択された目標エコーをハイライト表示することに代えて、他の表示方法を用いても良い。
【0089】
次に、追尾情報の引継ぎについて説明する。上述のように、第1レーダ装置1及び第2レーダ装置2は、物標を検出可能な範囲が限られている。そのため、目標エコーの追尾中に、当該目標エコーが自身の物標検出可能範囲から外れることがある。図12では、物標Dが第1レーダ装置1の物標検出可能範囲から外れるときの様子を示している。なお、各レーダ装置は、自身の物標検出可能範囲を把握しており、自身が追尾中の目標エコーの針路に基づいて、自身が追尾中の目標エコーが検出できなくなると判断したときに、その旨をTT情報管理サーバ41へ送信する。第1レーダ装置1が物標Dを検出できなくなる旨をTT情報管理サーバ41に送信した場合、TT情報管理サーバ41は、この物標D(既にTT情報格納部52に登録されている)を追尾中の他のレーダ装置があるか否かを判断する。
【0090】
物標Dを追尾中のレーダ装置がない場合は、TT情報管理サーバ41は、当該物標Dを検出可能なレーダ装置(第2レーダ装置2)に目標追尾を行わせる。そして、上記で示したように、第2レーダ装置2が検出した物標Dに関する情報が第1レーダ装置1に送信される。第1レーダ装置1では、上記の第2表示モードに設定することにより、物標Dを引き続き監視することができる。
【0091】
一方、物標Dを追尾中のレーダ装置があった場合は、物標Dに関する情報は上記のように第1レーダ装置1へ送信され続けるので、TT情報管理サーバ41は特に処理を行わない。
【0092】
以上に説明したように、本実施形態の追尾情報管理装置は、受信部51と、判断部53と、グローバルID付与部54と、データ推定部55と、送信部56と、を備える。受信部51は、レーダアンテナ11が受信したエコーに基づいて目標追尾を行うことで得られたTT情報を第1レーダ装置1から受信するとともに、レーダアンテナ31が受信したエコーに基づいて目標追尾を行うことで得られたTT情報を第2レーダ装置2から受信する。判断部53は、TT情報に含まれる目標エコー同士が同一の物標を示すか否かを判断する。グローバルID付与部54は、判断部53の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。データ推定部55は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーの位置及び速度に基づいて物標の位置及び速度を推定する。送信部56は、グローバルID付与部54が付与したグローバルIDと、データ推定部55が推定した物標の推定位置及び推定速度と、を第1レーダ装置1及び第2レーダ装置2に送信する。第1レーダ装置1及び第2レーダ装置2は、グローバルID付与部54から付与されたグローバルIDを付加して、目標エコーを表示する。
【0093】
これにより、同一の物標を示す目標エコーに同じID(グローバルID)を付与することができる。そのため、同一の物標を示す目標エコーを、異なるレーダ装置間でも同一のIDとともに表示することができる。従って、整合のとれた情報を同一作業を行う複数のユーザに提供することができる。
【0094】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0095】
上記実施形態では、目標エコーにグローバルIDを付加して表示部23,43に表示する構成であるが、例えば同じグローバルIDが設定された目標エコーを同じ色又は同じマーク等で表示して、同じ物標を示すか否かを分かるように表示する構成にしても良い。
【0096】
レーダ装置間の接続は、有線に限られず、無線で行っても良い。また、レーダ装置間をLANで接続することに代えて、例えばインターネット等のWANを用いて接続しても良い。
【0097】
上記実施形態では、船舶に搭載されるレーダ装置を例に挙げて説明したが、他の移動体(例えば航空機)に搭載されるレーダ装置にも、本構成を適用することができる。また、例えば灯台、海峡、及び港湾等に設置され、周囲の状況をレーダエコーによって検出する構成のレーダ装置にも本構成を適用することができる。
【0098】
TT情報管理システム100を構成するレーダ装置は、同一船上に設置されている必要はなく、異なる船舶に跨って設けられていても良い。また、レーダ装置が移動体に搭載されない場合であっても、別々の場所に設置することができる。
【符号の説明】
【0099】
10 第1レーダセンサ
11 レーダアンテナ(第1レーダアンテナ)
13 TT情報取得部(取得部)
20 第1レーダ指示器
21 TT情報管理クライアント(通信部)
23 表示部
30 第2レーダセンサ
31 レーダアンテナ(第2レーダアンテナ)
33 TT情報取得部(取得部)
40 第2レーダ指示器
41 TT情報管理サーバ(追尾情報管理装置)
43 表示部
51 受信部
53 判断部
54 グローバルID付与部(ID付与部)
55 データ推定部
56 送信部
100 TT情報管理システム(追尾情報管理システム)
【技術分野】
【0001】
本発明は、主として、レーダアンテナが取得したエコーに基づいて得られる追尾情報を管理する追尾情報管理装置に関する。
【背景技術】
【0002】
従来から、船舶の衝突予防、人命安全の観点から、各種の航行支援装置が開発されている。このような航行支援装置として、例えばTT(Target Tracking:目標追尾)機能を備えたレーダ装置等が知られている。ここでTT機能とは、簡単に説明すると、過去のレーダ映像の推移に基づいて自船周囲に存在する物標の位置及び速度ベクトルを検出するものである。特許文献1は、このTT機能を備えたレーダ装置を2つ備えた構成を開示する。
【0003】
特許文献1が開示するレーダ装置では、一方のレーダ装置が取得した情報を他方のレーダ装置で表示する構成が開示されている。例えばクラッタ等の影響によって一方のレーダ装置においてTT情報が適切に取得できなくなった場合、ユーザは、他方のレーダ装置に表示されたターゲットを選択することで、対応するターゲットを一方のレーダ装置に表示することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−122063号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1の構成では、ターゲットが2つのレーダ装置で統一された表示となっていない。そのため、一方のレーダ装置で適切に表示されないターゲットが他方のレーダ装置のどのターゲットに対応するかを即座に判断することができなかった。
【0006】
本発明は以上の事情に鑑みてされたものであり、その目的は、異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0008】
本発明の第1の観点によれば、以下の構成の追尾情報管理装置が提供される。即ち、この追尾情報管理装置は、受信部と、判断部と、ID付与部と、送信部と、を備える。前記受信部は、第1レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第1レーダ装置から受信するとともに、第2レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第2レーダ装置から受信する。前記判断部は、前記第1レーダ装置から受信した目標エコーが示す物標と、前記第2レーダ装置から受信した目標エコーが示す物標と、が同一であるか否かを判断する。前記ID付与部は、前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。前記送信部は、前記ID付与部が付与したIDを前記第1レーダ装置及び前記第2レーダ装置に送信して、前記第1レーダ装置に表示される目標エコーと、前記第2レーダ装置に表示される目標エコーと、が同じ物標を示すか否かを分かるようにする。
【0009】
これにより、同一の物標を示す目標エコーに同じIDを付与することができる。そのため、同一の物標を示す目標エコーを、異なるレーダ装置間でも同一の表示態様(同じ文字又はマーク等)で表示することができる。従って、整合のとれた情報を同作業を行う複数のユーザに提供することができる。
【0010】
前記の追尾情報管理装置においては、前記判断部は、目標エコーの位置、速さ、及び針路のうち少なくとも1つを利用して、目標エコーが示す物標が同一であるか否かを判断することが好ましい。
【0011】
これにより、目標追尾を行うことで取得可能なデータを利用して、目標エコーが示す物標が同一であるか否かを判断することができる。従って、物標の同一性を判断するために特別なデータを取得する必要がないので、処理を簡単にすることができる。
【0012】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、この追尾情報管理装置は、データ推定部を備える。前記データ推定部は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーのデータに基づいて物標のデータを推定する。前記送信部は、前記データ推定部が推定したデータを、当該物標を検出したレーダ装置に送信する。
【0013】
これにより、複数のレーダ装置が取得した複数のデータに基づいた推定が可能であるので、物標のデータを精度良く推定できる。
【0014】
前記の追尾情報管理装置においては、前記データ推定部は、複数の目標エコーのデータを平均して、物標のデータを推定することが好ましい。
【0015】
これにより、データ推定部が行う処理を簡単にしつつ、物標のデータを精度良く推定できる。
【0016】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、レーダアンテナ毎に優先順位が設定されている。前記データ推定部は、優先順位に基づいて決定されたレーダアンテナによって得られた目標エコーのデータを、物標のデータの推定値とする。
【0017】
これにより、例えば高性能なレーダアンテナや設置条件の良いレーダアンテナの優先順位を高くすることで、高性能なレーダアンテナが利用される機会を多くすることができる。その結果、物標のデータを精度良く推定できる。
【0018】
前記の追尾情報管理装置においては、以下の構成とすることが好ましい。即ち、レーダ装置が追尾中の目標エコーが当該レーダ装置の物標検出可能範囲から外れる旨の通知を受けたときに、同一の物標を追尾中の他のレーダ装置があるか否かを判断する。同一の物標を追尾中のレーダ装置がない場合は、当該物標を検出可能なレーダ装置に追尾を開始させる指示を行う。
【0019】
これにより、目標エコーの追尾の引継ぎを行うことができる。特に、本発明の構成では、同一の物標を示す目標エコーに同じIDを付与することができるので、レーダ装置間での追尾の引継ぎを円滑に行うことができる。
【0020】
前記の追尾情報管理装置においては、前記ID付与部がレーダ装置内に設けられることが好ましい。
【0021】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、システム全体の構成をコンパクトにすることができる。
【0022】
本発明の第2の観点によれば、前記の追尾情報管理システムと、レーダ装置と、を備える追尾情報管理システムが提供される。
【0023】
これにより、前記の効果を発揮できる追尾情報管理システムが実現できる。
【0024】
ただし、前記の追尾情報管理システムは、前記の追尾情報管理装置を備えたレーダ装置と、他のレーダ装置と、を備える構成とすることができる。
【0025】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、追尾情報管理システムの構成をコンパクトにすることができる。
【0026】
前記の追尾情報管理システムにおいては、前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、当該目標エコーが選択されたことが他方のレーダ装置に通知されることが好ましい。
【0027】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、他のユーザが注目した目標エコーを直感的かつ即座に把握することができる。
【0028】
前記の追尾情報管理システムにおいては、前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、選択された目標エコーの数値情報が、一方のレーダ装置及び他方のレーダ装置の両方で表示されることが好ましい。
【0029】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、他のユーザが注目した目標エコーを数値情報とともに把握することができる。従って、例えば自機と衝突の可能性がある目標エコーを速度及び針路等とともに知らせることができるので、当該目標エコーへの対応を即座に行うことができる。
【0030】
本発明の第3の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、レーダアンテナと、取得部と、通信部と、表示部と、を備える。前記取得部は、前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する。前記通信部は、前記取得部が取得した目標エコーを、目標エコーに関するデータの管理を行う追尾情報管理装置に送信するとともに、同一の物標を示す目標エコーに同一のIDが割り当てられるようにID付与部によって付与されたIDを前記追尾情報管理装置から受信する。前記表示部は、前記追尾情報管理装置から受信したIDに基づいた表示態様で目標エコーを表示する。
【0031】
これにより、自機及び他のレーダ装置の目標エコーが示す物標が同一であれば、同一の表示態様(同じ文字又はマーク等)で当該目標エコーを表示することができる。これにより、レーダ装置間で整合のとれた情報を同作業を行う複数のユーザに提供することができる。
【0032】
ただし、前記のレーダ装置は、以下の構成とすることもできる。即ち、このレーダ装置は、レーダアンテナと、取得部と、判断部と、付与部と、表示部と、を備える。前記取得部は、前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する。前記判断部は、前記レーダアンテナにより取得された目標エコーが示す物標と、他のレーダ装置により取得された目標エコーが示す物標と、が同一であるか否かを判断する。前記ID付与部は、前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。前記表示部は、前記ID付与部が付与したIDに基づいた表示態様で目標エコーを表示する。
【0033】
これにより、追尾情報管理装置をレーダ装置外に設ける構成と比較して、システム全体の構成をコンパクトにすることができる。
【0034】
前記のレーダ装置においては、前記表示部は、自機が取得した目標エコーのみを表示する表示モードを有することが好ましい。
【0035】
これにより、自機が現在検出中の物標を容易に把握することができる。また、他のレーダ装置のみが検出した物標が多数表示されて表示部が見にくくなることを防止できる。
【0036】
前記のレーダ装置においては、前記表示部は、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードを有することが好ましい。
【0037】
これにより、複数のレーダ装置を有効に活用して、自機の周囲の情報をより詳細に把握することができる。
【0038】
前記のレーダ装置においては、前記表示部は、自機のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示することが好ましい。
【0039】
これにより、ユーザは、注目する目標エコーが、自機のみが取得した目標エコーか、そうでない目標エコー(自機及び他機が取得した目標エコーや他機のみが取得した目標エコー)か、を素早く把握することができる。
【0040】
前記のレーダ装置においては、以下の構成とすることが好ましい。即ち、自機のみが取得した目標エコーには、自機によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるID(ローカルID)を少なくとも付加して表示する。一方、そうでない目標エコーには、前記ID付与部によって付与されるID(グローバルID)を少なくとも付加して表示する。
【0041】
これにより、ユーザは、目標エコーに付与されたIDとともに、注目する目標エコーが、自機のみが取得した目標エコーか、そうでない目標エコーかを把握することができる。
【0042】
前記のレーダ装置においては、自機及び他のレーダ装置の両方で検出されている目標エコーが自機において選択された際に、当該目標エコーが選択されたことを他のレーダ装置に通知することが好ましい。
【0043】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、注目した目標エコーを直感的かつ即座に他のユーザに把握させることができる。
【0044】
前記のレーダ装置においては、自機及び他のレーダ装置の両方で検出されている目標エコーが当該自機において選択された際に、選択された目標エコーの数値情報を前記表示部に表示するとともに、他のレーダ装置に通知を行って、当該目標エコーの数値情報を表示させることが好ましい。
【0045】
これにより、例えば複数のユーザがそれぞれ表示部を参照している場合において、ユーザは、注目した目標エコーを数値情報とともに他のユーザに把握させることができる。従って、例えば自機と衝突の可能性がある目標エコーを速度及び針路等とともに知らせることができるので、当該目標エコーへの対応を即座に行うことができる。
【0046】
前記のレーダ装置においては、以下の構成とすることが好ましい。即ち、目標エコーの相対位置の基準位置が設定されており、レーダ装置は、自機が備える前記レーダアンテナの位置と、前記基準位置と、に基づいて当該基準位置に対する目標エコーの相対位置を算出する。
【0047】
これにより、目標エコーの相対位置の基準位置がレーダ装置間でズレないので、例えば物標の同一性をより的確に判断することができる。
【0048】
前記のレーダ装置においては、自機が備える前記レーダアンテナの地球基準の位置に基づいて目標エコーの地球基準の位置を算出することが好ましい。
【0049】
これにより、基準位置を設定することなく、レーダアンテナの設置箇所の違いに基づく目標エコーの位置ズレを防止することができる。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施形態に係るTT情報管理システムの構成を示すブロック図。
【図2】物標の相対位置の基準位置を説明する図。
【図3】TT情報管理サーバの構成を示すブロック図。
【図4】第1レーダ装置及び第2レーダ装置の物標検出可能範囲を示す図。
【図5】各物標に付与されたIDを示す表。
【図6】判断部の判断基準の一例を示す表。
【図7】データ推定部の推定例を示す表。
【図8】従来例における目標エコーの表示例を示す図。
【図9】本実施形態の第1表示モードにおける目標エコーの表示例を示す図。
【図10】本実施形態の第2表示モードにおける目標エコーの表示例を示す図。
【図11】第1レーダ装置と第2レーダ装置の表示部が連動することを示す図。
【図12】追尾情報の引継ぎが必要な状況を説明する図。
【発明を実施するための形態】
【0051】
次に、図面を参照して本発明の実施の形態を説明する。図1は、本発明の一実施形態に係るTT情報管理システム(追尾情報管理システム)100の構成を示すブロック図である。図2は、物標の相対位置の基準位置を説明する図である。
【0052】
図1に示すTT情報管理システム100は、機器間の相互通信を可能とする有線のLAN60を介して互いに接続された第1レーダ装置1と、第2レーダ装置2と、から構成されている。なお、TT情報管理システム100を構成するレーダ装置の数は2機に限られず、より多くのレーダ装置によって構成されていても良い。
【0053】
初めに、第1レーダ装置1及び第2レーダ装置2について説明する。なお、第1レーダ装置1と第2レーダ装置2は、一部(後述のTT情報管理クライアント21を備えるかTT情報管理サーバ41を備えるか)が異なるだけであるので、以下では、代表して第1レーダ装置1について説明し、第2レーダ装置2の構成の説明を省略することがある。
【0054】
第1レーダ装置1は、電波の送信を行うとともに、物標からの反射波を受信して、当該反射に適宜の演算を行うことで物標の位置を検出する装置である。第1レーダ装置1は、具体的には、図1に示すように、第1レーダセンサ10と、第1レーダ指示器20と、を備える。
【0055】
第1レーダセンサ10は、前記電波の送受信及び信号処理を行うユニットである。第1レーダセンサ10は、レーダアンテナ(第1レーダアンテナ)11と、信号処理部12と、TT情報取得部(取得部)13と、を備える。
【0056】
レーダアンテナ11は、指向性の強いパルス状のマイクロ波の送信を行い、当該マイクロ波が物標に反射して戻ってきたエコー(反射波)を受信するように構成されている。また、レーダアンテナ11は、所定の回転速度で回転しながら、電波の送受信を繰り返し行うように構成されている。以上の構成で、水平面内を、自船を中心として360°にわたってスキャンすることができる。
【0057】
なお、このパルスレーダに代えて、CW(continuous wave)レーダやパルスドップラーレーダを用いても良い。また、上記の構成に代えて、レーダアンテナを回転させない構成のレーダ装置を用いても良い。例えば、全周方向にアンテナ素子を有する構成のレーダ装置や、前方等の特定の方向のみを探知するレーダ装置等は、レーダアンテナを回転させる必要がない。
【0058】
信号処理部12は、レーダアンテナ11がマイクロ波を送信したタイミングと、エコーを受信したタイミングとの時間差から、物標までの距離を取得する。また、信号処理部12は、前記エコーを受信したときのレーダアンテナ11の向き(マイクロ波の送受信方向)によって、エコー源が存在する方向を取得する。信号処理部12は、このようにしてレーダ映像を作成し、TT情報取得部13及び第1レーダ指示器20へ出力する。
【0059】
TT情報取得部13は、TT(目標追尾)機能を実現するためのものである。このTT(又はARPA)機能は公知であるので詳細な説明は省略するが、レーダ映像に基づいて目標エコーの位置を自動的に検出・捕捉するとともに、レーダ映像の時間推移に基づいて目標エコーの移動を追尾することにより物標(目標エコー)の速度ベクトルを推定するものである。
【0060】
なお、TT情報取得部13が取得した物標の位置は、レーダアンテナ11に対する相対的な情報である。そのため、図2に示すように、レーダアンテナの設置位置が異なる場合、物標が同じであっても、第1レーダ装置1のレーダアンテナ11が取得する場合と、第2レーダ装置2のレーダアンテナ31が取得する場合と、で物標(目標エコー)の相対位置が異なってしまう。そのため、TT情報取得部13は、相対位置の基準位置を変更する処理を行う。本実施形態では、目標エコーの相対位置の基準位置として、操船位置(操船操作を行う位置)が設定されており、各レーダ装置では、この操船位置を基準として相対位置が求められる。以上のようにして得られた目標エコーの相対位置及び速度を示す情報(追尾情報、TT情報)は、第1レーダ指示器20へ出力される。なお、物標の相対位置の基準位置は、一意に定まる点が指定されていれば、操船位置でなくても良い。また、第2レーダ装置2のTT情報取得部33も同様に、信号処理装置32が生成したレーダ映像に基づいて、相対位置の基準位置を変更する処理を行う。
【0061】
なお、第1レーダセンサ10は、以下のようにして、物標の地球基準の位置(絶対位置)を取得することもできる。即ち、予め、GPS受信機が設置される位置と、レーダアンテナ11が設置される位置と、の位置関係を求めて記憶しておく。これにより、この位置関係と、GPS受信機が検出した絶対位置と、に基づいて、レーダアンテナ11の絶対位置を求めることができる。また、レーダアンテナ11と物標の位置関係は、エコーに基づいて上記のようにして求めることができる。以上により、物標の絶対位置を求めることができる。なお、絶対位置を求める場合でも、相対位置を求める場合と同様に、位置を示す情報が第1レーダ指示器20へ送信される。また、第2レーダ装置2も同様にして、物標の絶対位置を求めることができる。
【0062】
第1レーダ指示器20は、TT情報管理クライアント(通信部)21と、TT情報記憶部22と、表示部23と、を主要な構成として備える。
【0063】
TT情報管理クライアント21は、TT情報をTT情報管理システム100で管理するときのクライアントとして機能する。一方、第2レーダ装置2には、このTT情報管理クライアント21の代わりにTT情報管理サーバ(追尾情報管理装置)41が設けられている。TT情報管理サーバ41は、TT情報をTT情報管理システム100で管理するときのサーバとして機能する。従って、例えば3機以上のレーダ装置でTT情報管理システム100が構成される場合、そのうちの1機がTT情報管理サーバを備え、残りがTT情報管理クライアントを備える構成となる。なお、本実施形態ではTT情報管理サーバ41がレーダ装置内に設けられているが、TT情報管理サーバ41をレーダ装置外に配置し、全てのレーダ装置がTT情報管理クライアントを備える構成とすることもできる。また、TT情報管理クライアント21とTT情報管理サーバ41とは固定である必要はなく、TT情報管理クライアントの機能とTT情報管理サーバの機能とを切り替えることができるTT情報管理部を設け、TT情報管理サーバとして動作する機器が故障した場合であっても、他のTT情報管理部が代替サーバとして動作できるような構成にしてもよい。なお、このTT情報管理クライアント21及びTT情報管理サーバ41が行う処理の詳細は後述する。
【0064】
TT情報記憶部22は、TT情報取得部13が取得したTT情報を記憶する。そして、TT情報取得部13が新しい目標エコーを取得した場合には、当該目標エコーのTT情報がTT情報記憶部22に新しく登録される。一方、TT情報記憶部22に既にTT情報が登録されている目標エコーについては、当該新しいデータが得られる度に、TT情報記憶部22に記憶されている内容が更新される。また、第2レーダ装置2が備えるTT情報記憶部42は、前記TT情報取得部33が取得したTT情報を記憶し、TT情報記憶部22と同様にデータの更新等を行う。
【0065】
表示部23は、カラー表示可能な液晶ディスプレイとして構成される。表示部23には、前記信号処理部12が生成したレーダ映像と、TT情報記憶部22の記憶内容と、が入力される。そして、表示部23は、レーダ映像とTT情報とを重畳して表示することができる。
【0066】
次に、主にTT情報管理クライアント21及びTT情報管理サーバ41が行う処理の流れを説明して、TT情報が管理される構成について説明する。図3は、TT情報管理サーバ41の構成を示すブロック図である。図4は、第1レーダ装置1及び第2レーダ装置2の物標検出可能範囲を示す図である。図5は、各物標に付与されたIDを示す表である。なお、図3に示すように、TT情報管理サーバ41は、受信部51と、TT情報格納部52と、判断部53と、グローバルID付与部(ID付与部)54と、データ推定部55と、送信部56と、を備える。
【0067】
以下では、図4に示すように、自船の周りに、物標A、物標B、及び物標Cが存在する状況を考える。また、第1レーダ装置1及び第2レーダ装置2が備えるレーダアンテナは、船上の構造物等によってマイクロ波が遮られるため、物標を検出できる範囲が限られる。具体的には、レーダアンテナ11は、図4に示すように、自船の後方以外の物標を検出可能に構成されている。一方、第2レーダセンサ30が備えるレーダアンテナ(第2レーダアンテナ)31は、自船の前方以外の物標を検出可能に構成されている。
【0068】
従って、第1レーダ装置1は、物標A及び物標Bを検出可能である。一方、第2レーダ装置2は、物標B及び物標Cを検出可能である。なお、以下では、第2レーダ装置2が物標B及び物標Cを検出済みであり、第1レーダ装置1が新しく物標A及び物標Bを検出したときに行われる処理を説明する。なお、以下の説明では、第1レーダ装置1が取得した物標A,Bに対応するエコーを第1目標エコーA,Bと称し、第2レーダ装置2が取得した物標B,Cに対応するエコーを第2目標エコーB,Cと称する。
【0069】
第1レーダ装置1のTT情報取得部13は、第1目標エコーA,BのTT情報をレーダ映像に基づいて求め、TT情報記憶部22へ出力する。TT情報記憶部22は、第1目標エコーA,Bを新しく登録する。このとき、新しく登録される目標エコーには、ローカルIDが付与される。ローカルIDとは、自機(ここでは第1レーダ装置1)によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるIDである。ここでは、図5に示すように、第1目標エコーAに「L11」が付与され、第1目標エコーBに「L12」が付与されたものとする。なお、このローカルIDは、他のレーダ装置のローカルIDと重複してしまうことがある。また、第2レーダ装置2が検出した物標Bに対応するエコーである第2目標エコーBには、第2レーダ装置2のローカルIDとして、既に「L21」が付与されているものとし、第2目標エコーCには、既に「L22」が付与されているものとする。
【0070】
TT情報管理クライアント21は、新しく登録された第1目標エコーA,BのTT情報をローカルIDとともにTT情報記憶部22から取得して、第2レーダ指示器40が備えるTT情報管理サーバ41へ送信する。
【0071】
TT情報及びローカルIDは、TT情報管理サーバ41の受信部51によって受信され、TT情報管理サーバ41が備えるTT情報格納部52に記憶される。このTT情報格納部52には、TT情報管理システム100を構成する全てのレーダ装置が検出した目標エコーのローカルID及びTT情報等が記憶されている。
【0072】
そして、TT情報管理サーバ41の判断部53は、受信部51が受信したTT情報に基づいて、受信した第1目標エコーA,Bと同一の物標が既にTT情報格納部52に登録されているか否かを判断する。この判断は、例えば図6に示す表に基づいて行われる。図6は、判断部53の判断基準の一例を示す表である。図6には、条件項目として、注目する2つの目標エコー同士の、距離差、方位差、速度差、及び針路差が設定されている。また、この表には、この条件項目に対応する条件の内容(閾値)が記述されている。判断部53は、注目する2つの目標エコーについて、例えば4つの条件項目を全て満たしたときに、これらの目標エコーが同一の物標を示していると判断する。なお、この判断方法は任意であり、例えば3つの条件項目を満たしたときに判断部53が同一の物標を示していると判断する構成であっても良い。また、この判断で用いられる条件項目は上記で示した例に限られず、例えば、目標エコーの大きさや形状(縦横比等)を用いることができる。また、それぞれの条件項目に対応する閾値は、ユーザによって変更可能となっており、状況に応じた柔軟な対応を行うことができる。
【0073】
判断部53は、このようにして目標エコーがどの物標を示しているか判断する。そして、TT情報管理サーバ41が備えるグローバルID付与部54は、同一の物標であると判断された目標エコーに対して同一のID(グローバルID)を付与する。グローバルIDは、TT情報管理システム100内で同一の物標を示す目標エコーごとに一意に割り当てられるIDであり、異なる物標を示す目標エコーには異なるIDが付与される。具体的には、第1レーダ装置1が検出した物標Aは、第2レーダ装置2の物標検出可能範囲外であるため、TT情報格納部52にはまだ登録されていない。そのため、第1目標エコーAには、新しいグローバルID(G3)が付与される。一方、第1レーダ装置1が検出した物標Bは、第2レーダ装置2によって既に検出されてTT情報格納部52に登録されているため、第1目標エコーBには、第2目標エコーBと同じグローバルID(G2)が付与される。
【0074】
次に、受信部51のデータ推定部55は、受信したTT情報に基づいて、物標のデータ(位置、速度、針路等)の推定を行う。この推定は、同一の物標を示す目標エコーが複数存在する場合に行われる。つまり、本実施形態の例では、物標Bについて、この推定が行われる。以下、データ推定部55が行う物標のデータの推定例について、データ推定部の推定例を示す表である図7を参照して説明する。例えば、データ推定部55は、図7(a)に示すように、第1レーダ装置1が検出した速度と、第2レーダ装置2が検出した速度と、の平均をとることで物標の速度を推定することができる。また、この構成に代えて、図7(b)に示すように、予めレーダアンテナの優先順位を設定しておき、優先順位の高いレーダアンテナが取得した速度データを優先的に用いることもできる。レーダアンテナの優先順位は、レーダアンテナの性能によって定める他、レーダアンテナの設置条件に応じて定めたり、物標までの距離に応じて変化させたりしても良い。例えば、近距離の物標の場合は第1レーダ装置1の優先順位を高くし、遠距離の物標の場合は第2レーダ装置2の優先順位を高くすることもできる。また、レーダ装置が3つ以上設置される場合、各レーダ装置が検出した速度同士を比較して、他と大きく値が異なる速度を排除して信頼性が高い速度のみを用いて速度の推定を行っても良い。このように、複数のレーダ装置が取得した複数のデータに基づいて推定を行うことにより、物標の位置及び速度を精度良く推定できる。
【0075】
次に、TT情報管理サーバ41の送信部56は、グローバルID付与部54が付与したグローバルIDと、データ推定部55が推定した物標の推定位置及び推定速度と、をTT情報管理クライアント21へ返信する。
【0076】
TT情報管理クライアント21は、グローバルID及び物標の推定位置及び推定速度をTT情報記憶部22に送信して、記憶させる。このとき、TT情報取得部13が取得した位置及び速度は、データ推定部55が推定した推定位置及び推定速度によって上書きされる構成であっても良いし、残される構成であっても良い。
【0077】
表示部23は、このようにして得られた情報に基づいた表示を行う。以下、この表示について、図8から図10までを参照して説明する。図8は、従来例における目標エコーの表示例を示す図である。図9及び図10は、本実施形態における目標エコーの表示例を示す図である。
【0078】
初めに、従来例における目標エコーの表示例について説明する。従来では、レーダ装置間で統一したIDが用いられていなかった(ローカルIDしか用いられていなかった)。そのため、図8に示すように、レーダ装置間では、同じ物標(物標B)を示す目標エコーであっても異なるIDが付加された表示となっていた。この場合、2つのレーダ映像に表示される目標エコーの対応関係を即座に把握することが難しかった。
【0079】
これに対し、本実施形態では、レーダ装置間で統一したIDであるグローバルIDが用いられているので、図9に示すように、同じ物標(物標B)に同じIDが付加された表示とすることができる。従って、整合のとれた情報をユーザに提供することができる。なお、本実施形態のTT情報管理システム100では、表示部23及び表示部43は、2つの表示モードを切り替えて表示することが可能である。
【0080】
第1表示モードは、図9に示すように、自機が取得した目標エコーのみを表示する表示モードである。この表示モードでは、自機が現在検出中の物標を容易に把握することができる。また、他のレーダ装置のみが検出した物標が多数表示されて表示部が見にくくなることを防止できる。
【0081】
第2表示モードは、図10に示すように、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードである。この表示モードでは、複数のレーダ装置を有効に活用して、自機の周囲の情報をより詳細に把握することができる。
【0082】
また、どの目標エコーにどの種類のID(ローカルID、グローバルID、又はその両方)を付加して表示するかは、ユーザが設定することができる。例えば図9では、表示部23,43は、自レーダ装置のみが取得した目標エコー(第1レーダ装置1にとっての物標A、第2レーダ装置2にとっての物標C)については、それぞれローカルIDを付加しつつ表示している。一方、そうでない物標(両方のレーダ装置が取得した物標)である物標Bについては、それぞれグローバルIDを付加しつつ表示している。本実施形態では、このようにして、自レーダ装置のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示可能である。
【0083】
なお、この構成に代えて、例えば、全ての目標エコーについてローカルIDとグローバルIDの両方を付加して表示する構成であっても良い。更には、図10に示すように、表示部23,43が、全ての目標エコーについて、グローバルIDを付加しつつ表示する構成であっても良い。
【0084】
また、ユーザは、表示部23,43に表示されるポインタをマウス又はトラックボール等を用いて移動させ、クリック操作を行うことにより、所望の目標エコーを選択することができる。選択された目標エコーはハイライト表示等によって、他のエコーと異なる態様で表示される(図11を参照)。そして、表示部23,43は、選択されたエコーについての数値情報(針路、速度等)を表示する。ここで表示する数値情報は、前記データ推定部55が推定した推定位置及び推定速度であっても良いし、TT情報取得部13が取得した位置及び速度であっても良い。更には、両方の位置及び速度等を併せて表示しても良い。
【0085】
また、例えば第1レーダ装置1の表示部23で目標エコーが選択された場合、TT情報管理クライアント21は、選択された目標エコーのID等をTT情報管理サーバ41に対して通知する。第2レーダ装置2は、この通知に基づいて、表示部43に表示中の目標エコーをハイライト表示等によって、他のエコーと異なる態様に変更する。そして、表示部23と同様に、選択されたエコーについての数値情報(針路、速度等)を表示する(図11を参照)。
【0086】
なお、第2レーダ装置2の表示部43で目標エコーが選択された場合、上記と同様に、第1レーダ装置1の表示部23においても目標エコーがハイライト表示されるとともに数値情報が表示される。
【0087】
このように、本実施形態のTT情報管理システム100では、第1レーダ装置1及び第2レーダ装置2の両方で検出されている目標エコーを一方のレーダ装置で選択した際に、当該目標エコーが選択されたことが他方のレーダ装置に通知される。そして、通知を受けたレーダ装置は、その目標エコーの数値情報を表示する。
【0088】
なお、目標エコーの選択方法は、マウス及びトラックボールを用いた方法に限られず、カーソルキー及び決定キー等を用いて行っても良い。また、選択された目標エコーをハイライト表示することに代えて、他の表示方法を用いても良い。
【0089】
次に、追尾情報の引継ぎについて説明する。上述のように、第1レーダ装置1及び第2レーダ装置2は、物標を検出可能な範囲が限られている。そのため、目標エコーの追尾中に、当該目標エコーが自身の物標検出可能範囲から外れることがある。図12では、物標Dが第1レーダ装置1の物標検出可能範囲から外れるときの様子を示している。なお、各レーダ装置は、自身の物標検出可能範囲を把握しており、自身が追尾中の目標エコーの針路に基づいて、自身が追尾中の目標エコーが検出できなくなると判断したときに、その旨をTT情報管理サーバ41へ送信する。第1レーダ装置1が物標Dを検出できなくなる旨をTT情報管理サーバ41に送信した場合、TT情報管理サーバ41は、この物標D(既にTT情報格納部52に登録されている)を追尾中の他のレーダ装置があるか否かを判断する。
【0090】
物標Dを追尾中のレーダ装置がない場合は、TT情報管理サーバ41は、当該物標Dを検出可能なレーダ装置(第2レーダ装置2)に目標追尾を行わせる。そして、上記で示したように、第2レーダ装置2が検出した物標Dに関する情報が第1レーダ装置1に送信される。第1レーダ装置1では、上記の第2表示モードに設定することにより、物標Dを引き続き監視することができる。
【0091】
一方、物標Dを追尾中のレーダ装置があった場合は、物標Dに関する情報は上記のように第1レーダ装置1へ送信され続けるので、TT情報管理サーバ41は特に処理を行わない。
【0092】
以上に説明したように、本実施形態の追尾情報管理装置は、受信部51と、判断部53と、グローバルID付与部54と、データ推定部55と、送信部56と、を備える。受信部51は、レーダアンテナ11が受信したエコーに基づいて目標追尾を行うことで得られたTT情報を第1レーダ装置1から受信するとともに、レーダアンテナ31が受信したエコーに基づいて目標追尾を行うことで得られたTT情報を第2レーダ装置2から受信する。判断部53は、TT情報に含まれる目標エコー同士が同一の物標を示すか否かを判断する。グローバルID付与部54は、判断部53の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。データ推定部55は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーの位置及び速度に基づいて物標の位置及び速度を推定する。送信部56は、グローバルID付与部54が付与したグローバルIDと、データ推定部55が推定した物標の推定位置及び推定速度と、を第1レーダ装置1及び第2レーダ装置2に送信する。第1レーダ装置1及び第2レーダ装置2は、グローバルID付与部54から付与されたグローバルIDを付加して、目標エコーを表示する。
【0093】
これにより、同一の物標を示す目標エコーに同じID(グローバルID)を付与することができる。そのため、同一の物標を示す目標エコーを、異なるレーダ装置間でも同一のIDとともに表示することができる。従って、整合のとれた情報を同一作業を行う複数のユーザに提供することができる。
【0094】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0095】
上記実施形態では、目標エコーにグローバルIDを付加して表示部23,43に表示する構成であるが、例えば同じグローバルIDが設定された目標エコーを同じ色又は同じマーク等で表示して、同じ物標を示すか否かを分かるように表示する構成にしても良い。
【0096】
レーダ装置間の接続は、有線に限られず、無線で行っても良い。また、レーダ装置間をLANで接続することに代えて、例えばインターネット等のWANを用いて接続しても良い。
【0097】
上記実施形態では、船舶に搭載されるレーダ装置を例に挙げて説明したが、他の移動体(例えば航空機)に搭載されるレーダ装置にも、本構成を適用することができる。また、例えば灯台、海峡、及び港湾等に設置され、周囲の状況をレーダエコーによって検出する構成のレーダ装置にも本構成を適用することができる。
【0098】
TT情報管理システム100を構成するレーダ装置は、同一船上に設置されている必要はなく、異なる船舶に跨って設けられていても良い。また、レーダ装置が移動体に搭載されない場合であっても、別々の場所に設置することができる。
【符号の説明】
【0099】
10 第1レーダセンサ
11 レーダアンテナ(第1レーダアンテナ)
13 TT情報取得部(取得部)
20 第1レーダ指示器
21 TT情報管理クライアント(通信部)
23 表示部
30 第2レーダセンサ
31 レーダアンテナ(第2レーダアンテナ)
33 TT情報取得部(取得部)
40 第2レーダ指示器
41 TT情報管理サーバ(追尾情報管理装置)
43 表示部
51 受信部
53 判断部
54 グローバルID付与部(ID付与部)
55 データ推定部
56 送信部
100 TT情報管理システム(追尾情報管理システム)
【特許請求の範囲】
【請求項1】
第1レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第1レーダ装置から受信するとともに、第2レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第2レーダ装置から受信する受信部と、
前記第1レーダ装置から受信した目標エコーが示す物標と、前記第2レーダ装置から受信した目標エコーが示す物標と、が同一であるか否かを判断する判断部と、
前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与するID付与部と、
前記ID付与部が付与したIDを前記第1レーダ装置及び前記第2レーダ装置に送信して、前記第1レーダ装置に表示される目標エコーと、前記第2レーダ装置に表示される目標エコーと、が同じ物標を示すか否かが分かるようにする送信部と、
を備えることを特徴とする追尾情報管理装置。
【請求項2】
請求項1に記載の追尾情報管理装置であって、
前記判断部は、目標エコーの位置、速さ、及び針路のうち少なくとも1つを利用して、目標エコーが示す物標が同一であるか否かを判断することを特徴とする追尾情報管理装置。
【請求項3】
請求項1又は2に記載の追尾情報管理装置であって、
データ推定部を備え、
前記データ推定部は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーのデータに基づいて物標のデータを推定し、
前記送信部は、前記データ推定部が推定したデータを、当該物標を検出したレーダ装置に送信することを特徴とする追尾情報管理装置。
【請求項4】
請求項3に記載の追尾情報管理装置であって、
前記データ推定部は、複数の目標エコーのデータを平均して、物標のデータを推定することを特徴とする追尾情報管理装置。
【請求項5】
請求項3に記載の追尾情報管理装置であって、
レーダアンテナ毎に優先順位が設定されており、
前記データ推定部は、優先順位に基づいて決定されたレーダアンテナによって得られた目標エコーのデータを、物標のデータの推定値とすることを特徴とする追尾情報管理装置。
【請求項6】
請求項1から5までの何れか一項に記載の追尾情報管理装置であって、
レーダ装置が追尾中の目標エコーが当該レーダ装置の物標検出可能範囲から外れる旨の通知を受けたときに、同一の物標を追尾中の他のレーダ装置があるか否かを判断し、
同一の物標を追尾中のレーダ装置がない場合は、当該物標を検出可能なレーダ装置に追尾を開始させる指示を行うことを特徴とする追尾情報管理装置。
【請求項7】
請求項1から6までの何れか一項に記載の追尾情報管理装置であって、
前記ID付与部がレーダ装置内に設けられることを特徴とする追尾情報管理装置。
【請求項8】
請求項1から6までの何れか一項に記載の追尾情報管理装置と、
複数のレーダ装置と、
を備えることを特徴とする追尾情報管理システム。
【請求項9】
請求項1から6までの何れか一項に記載の追尾情報管理装置を備えたレーダ装置と、
他のレーダ装置と、
を備えることを特徴とする追尾情報管理システム。
【請求項10】
請求項8又は9に記載の追尾情報管理システムであって、
前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、当該目標エコーが選択されたことが他方のレーダ装置に通知されることを特徴とする追尾情報管理システム。
【請求項11】
請求項8から10までの何れか一項に記載の追尾情報管理システムであって、
前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、選択された目標エコーの数値情報が、一方のレーダ装置及び他方のレーダ装置の両方で表示されることを特徴とする追尾情報管理システム。
【請求項12】
レーダアンテナと、
前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する取得部と、
前記取得部が取得した目標エコーを、目標エコーに関するデータの管理を行う追尾情報管理装置に送信するとともに、同一の物標を示す目標エコーに同一のIDが割り当てられるようにID付与部によって付与されたIDを前記追尾情報管理装置から受信する通信部と、
前記追尾情報管理装置から受信したIDに基づいた表示態様で目標エコーを表示する表示部と、
を備えることを特徴とするレーダ装置。
【請求項13】
レーダアンテナと、
前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する取得部と、
前記レーダアンテナにより取得された目標エコーが示す物標と、他のレーダ装置により取得された目標エコーが示す物標と、が同一であるか否かを判断する判断部と、
前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与するID付与部と、
前記ID付与部が付与したIDに基づいた表示態様で目標エコーを表示する表示部と、
を備えることを特徴とするレーダ装置。
【請求項14】
請求項12又は13に記載のレーダ装置であって、
前記表示部は、自機が取得した目標エコーのみを表示する表示モードを有することを特徴とするレーダ装置。
【請求項15】
請求項12から14までの何れか一項に記載のレーダ装置であって、
前記表示部は、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードを有することを特徴とするレーダ装置。
【請求項16】
請求項12から15までの何れか一項に記載のレーダ装置であって、
前記表示部は、自機のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示することを特徴とするレーダ装置。
【請求項17】
請求項16に記載のレーダ装置であって、
前記表示部は、
自機のみが取得した目標エコーには、自機によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるIDを少なくとも付加して表示し、
そうでない目標エコーには、前記ID付与部によって付与されるIDを少なくとも付加して表示することを特徴とするレーダ装置。
【請求項18】
請求項12から17までの何れか一項に記載のレーダ装置であって、
自機及び他のレーダ装置の両方で検出されている目標エコーが自機において選択された際に、当該目標エコーが選択されたことを他のレーダ装置に通知することを特徴とするレーダ装置。
【請求項19】
請求項12から18までの何れか一項に記載のレーダ装置であって、
自機及び他のレーダ装置の両方で検出されている目標エコーが当該自機において選択された際に、選択された目標エコーの数値情報を前記表示部に表示するとともに、他のレーダ装置に通知を行って、当該目標エコーの数値情報を表示させることを特徴とするレーダ装置。
【請求項20】
請求項12から19までの何れか一項に記載のレーダ装置であって、
目標エコーの相対位置の基準位置が設定されており、
自機が備える前記レーダアンテナの位置と、前記基準位置と、に基づいて当該基準位置に対する目標エコーの相対位置を算出することを特徴とするレーダ装置。
【請求項21】
請求項12から19までの何れか一項に記載のレーダ装置であって、
自機が備える前記レーダアンテナの地球基準の位置に基づいて目標エコーの地球基準の位置を算出することを特徴とするレーダ装置。
【請求項1】
第1レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第1レーダ装置から受信するとともに、第2レーダアンテナが受信したエコーに基づいて目標追尾を行うことで得られた目標エコーに関するデータを第2レーダ装置から受信する受信部と、
前記第1レーダ装置から受信した目標エコーが示す物標と、前記第2レーダ装置から受信した目標エコーが示す物標と、が同一であるか否かを判断する判断部と、
前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与するID付与部と、
前記ID付与部が付与したIDを前記第1レーダ装置及び前記第2レーダ装置に送信して、前記第1レーダ装置に表示される目標エコーと、前記第2レーダ装置に表示される目標エコーと、が同じ物標を示すか否かが分かるようにする送信部と、
を備えることを特徴とする追尾情報管理装置。
【請求項2】
請求項1に記載の追尾情報管理装置であって、
前記判断部は、目標エコーの位置、速さ、及び針路のうち少なくとも1つを利用して、目標エコーが示す物標が同一であるか否かを判断することを特徴とする追尾情報管理装置。
【請求項3】
請求項1又は2に記載の追尾情報管理装置であって、
データ推定部を備え、
前記データ推定部は、同一の物標を示す目標エコーが複数存在する場合、当該複数の目標エコーのデータに基づいて物標のデータを推定し、
前記送信部は、前記データ推定部が推定したデータを、当該物標を検出したレーダ装置に送信することを特徴とする追尾情報管理装置。
【請求項4】
請求項3に記載の追尾情報管理装置であって、
前記データ推定部は、複数の目標エコーのデータを平均して、物標のデータを推定することを特徴とする追尾情報管理装置。
【請求項5】
請求項3に記載の追尾情報管理装置であって、
レーダアンテナ毎に優先順位が設定されており、
前記データ推定部は、優先順位に基づいて決定されたレーダアンテナによって得られた目標エコーのデータを、物標のデータの推定値とすることを特徴とする追尾情報管理装置。
【請求項6】
請求項1から5までの何れか一項に記載の追尾情報管理装置であって、
レーダ装置が追尾中の目標エコーが当該レーダ装置の物標検出可能範囲から外れる旨の通知を受けたときに、同一の物標を追尾中の他のレーダ装置があるか否かを判断し、
同一の物標を追尾中のレーダ装置がない場合は、当該物標を検出可能なレーダ装置に追尾を開始させる指示を行うことを特徴とする追尾情報管理装置。
【請求項7】
請求項1から6までの何れか一項に記載の追尾情報管理装置であって、
前記ID付与部がレーダ装置内に設けられることを特徴とする追尾情報管理装置。
【請求項8】
請求項1から6までの何れか一項に記載の追尾情報管理装置と、
複数のレーダ装置と、
を備えることを特徴とする追尾情報管理システム。
【請求項9】
請求項1から6までの何れか一項に記載の追尾情報管理装置を備えたレーダ装置と、
他のレーダ装置と、
を備えることを特徴とする追尾情報管理システム。
【請求項10】
請求項8又は9に記載の追尾情報管理システムであって、
前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、当該目標エコーが選択されたことが他方のレーダ装置に通知されることを特徴とする追尾情報管理システム。
【請求項11】
請求項8から10までの何れか一項に記載の追尾情報管理システムであって、
前記第1レーダ装置及び前記第2レーダ装置の両方で検出されている目標エコーが一方のレーダ装置で選択された際に、選択された目標エコーの数値情報が、一方のレーダ装置及び他方のレーダ装置の両方で表示されることを特徴とする追尾情報管理システム。
【請求項12】
レーダアンテナと、
前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する取得部と、
前記取得部が取得した目標エコーを、目標エコーに関するデータの管理を行う追尾情報管理装置に送信するとともに、同一の物標を示す目標エコーに同一のIDが割り当てられるようにID付与部によって付与されたIDを前記追尾情報管理装置から受信する通信部と、
前記追尾情報管理装置から受信したIDに基づいた表示態様で目標エコーを表示する表示部と、
を備えることを特徴とするレーダ装置。
【請求項13】
レーダアンテナと、
前記レーダアンテナが受信したエコーに基づいて目標追尾を行うことで目標エコーに関するデータを取得する取得部と、
前記レーダアンテナにより取得された目標エコーが示す物標と、他のレーダ装置により取得された目標エコーが示す物標と、が同一であるか否かを判断する判断部と、
前記判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与するID付与部と、
前記ID付与部が付与したIDに基づいた表示態様で目標エコーを表示する表示部と、
を備えることを特徴とするレーダ装置。
【請求項14】
請求項12又は13に記載のレーダ装置であって、
前記表示部は、自機が取得した目標エコーのみを表示する表示モードを有することを特徴とするレーダ装置。
【請求項15】
請求項12から14までの何れか一項に記載のレーダ装置であって、
前記表示部は、自機が取得した目標エコーと、他のレーダ装置が取得した目標エコーと、の両方を表示する表示モードを有することを特徴とするレーダ装置。
【請求項16】
請求項12から15までの何れか一項に記載のレーダ装置であって、
前記表示部は、自機のみが取得した目標エコーと、そうでない目標エコーと、を区別して表示することを特徴とするレーダ装置。
【請求項17】
請求項16に記載のレーダ装置であって、
前記表示部は、
自機のみが取得した目標エコーには、自機によって管理され、自機が取得した目標エコー同士でのみ重複しないように付与されるIDを少なくとも付加して表示し、
そうでない目標エコーには、前記ID付与部によって付与されるIDを少なくとも付加して表示することを特徴とするレーダ装置。
【請求項18】
請求項12から17までの何れか一項に記載のレーダ装置であって、
自機及び他のレーダ装置の両方で検出されている目標エコーが自機において選択された際に、当該目標エコーが選択されたことを他のレーダ装置に通知することを特徴とするレーダ装置。
【請求項19】
請求項12から18までの何れか一項に記載のレーダ装置であって、
自機及び他のレーダ装置の両方で検出されている目標エコーが当該自機において選択された際に、選択された目標エコーの数値情報を前記表示部に表示するとともに、他のレーダ装置に通知を行って、当該目標エコーの数値情報を表示させることを特徴とするレーダ装置。
【請求項20】
請求項12から19までの何れか一項に記載のレーダ装置であって、
目標エコーの相対位置の基準位置が設定されており、
自機が備える前記レーダアンテナの位置と、前記基準位置と、に基づいて当該基準位置に対する目標エコーの相対位置を算出することを特徴とするレーダ装置。
【請求項21】
請求項12から19までの何れか一項に記載のレーダ装置であって、
自機が備える前記レーダアンテナの地球基準の位置に基づいて目標エコーの地球基準の位置を算出することを特徴とするレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−2837(P2013−2837A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−131233(P2011−131233)
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]