
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、連続観測された画像中の目標物を追尾する追尾装置に関する。
【背景技術】
【0002】
連続観測された画像中の目標物の追尾を行う追尾装置において、重要な処理の一つとして、新規に入力された画像から追尾対象となる目標を抽出する目標抽出処理が挙げられる。
画像中の目標を抽出する(あるいは、目標位置を検出する)ための従来技術としては、テンプレートマッチングが一般的である。テンプレートマッチングは、事前に用意した追尾目標のテンプレートと新規画像の間で差分処理等を行い、最もテンプレートと画素の分布が類似する領域を抽出する処理である。テンプレートは事前に用意するため、画像中の追尾目標はテンプレートと大きさや向きが一致する保証が無く、誤抽出が発生する可能性が高い。そこで、例えば特許文献1に記載された追尾装置では、最新の入力画像を用いてテンプレートを更新することで画像中の追尾目標とテンプレートとの差異を小さくし、誤抽出を抑制するようにしていた。
【0003】
また、追尾目標の大きさや向きが時間の経過とともに変化する場合に対応するため、複数のテンプレートを保持する方法も提案されている。例えば特許文献2には、複数のテンプレートを保持し、さらに最新入力画像より生成したテンプレートを保持するテンプレート群に追加することで誤抽出を抑制する方法が示されている。さらに、特許文献3には、大きさの異なるテンプレートを複数保持することで誤抽出を抑制する方法が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−236508号公報
【特許文献2】特許第3768073号公報
【特許文献3】特開2001−243476号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、画像中の追尾目標とテンプレートとの差異を完全に無くすことは不可能であり、テンプレートを用いた目標抽出処理では誤抽出の発生は避けられない。さらに、誤抽出を抑制するためのテンプレートの更新や複数テンプレートによる抽出処理は処理負荷が増大するという問題もあった。
【0006】
この発明は上記のような問題点を解決するためになされたもので、テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る追尾装置は、目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、目標抽出装置は、追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、目標領域に基づいて追尾点を算出して追尾点を追尾フィルタ装置に出力し、追尾フィルタ装置は、目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って追尾予測値を出力するようにしたものである。
【発明の効果】
【0008】
この発明の追尾装置は、追尾フィルタ装置によって、3次元空間上での追尾点の位置、速度、強度の予測を行い、目標抽出装置は、追尾フィルタ装置が出力する追尾予測値と新規入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素を抽出するようにしたので、テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1の追尾装置を示す構成図である。
【図2】この発明の実施の形態1の追尾装置におけるセンサ水平角と画像座標との関係を示す説明図である。
【図3】この発明の実施の形態1の追尾装置におけるセンサ垂直角と画像座標との関係を示す説明図である。
【図4】この発明の実施の形態1の追尾装置における第kフレームにおける画素の3次元座標と、センサ位置と、画素の距離値と、画素の3次元座標に対する方位角と仰角との関係を示す説明図である。
【図5】この発明の実施の形態1の追尾装置における第kフレームにおける画素のx座標とセンサ水平角との関係を示す説明図である。
【図6】この発明の実施の形態1の追尾装置における第kフレームにおける画素のy座標とz座標とセンサ垂直角との関係を示す説明図である。
【図7】この発明の実施の形態2の追尾装置を示す構成図である。
【図8】この発明の実施の形態3の追尾装置を示す構成図である。
【図9】この発明の実施の形態4の追尾装置を示す構成図である。
【図10】この発明の実施の形態5の追尾装置を示す構成図である。
【図11】この発明の実施の形態6の追尾装置を示す構成図である。
【発明を実施するための形態】
【0010】
実施の形態1.
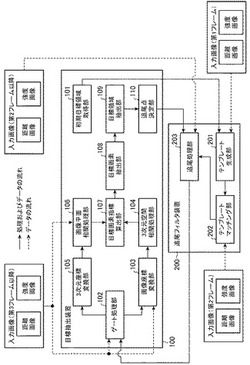
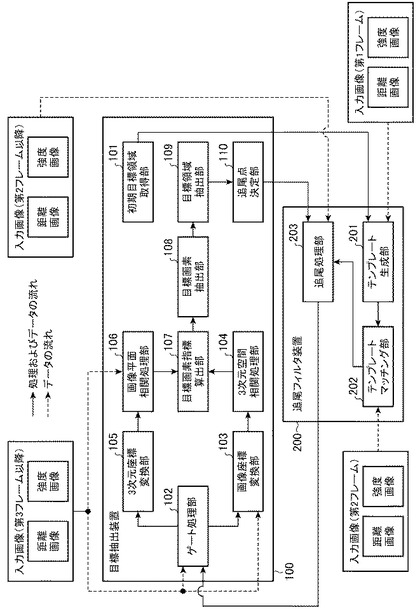
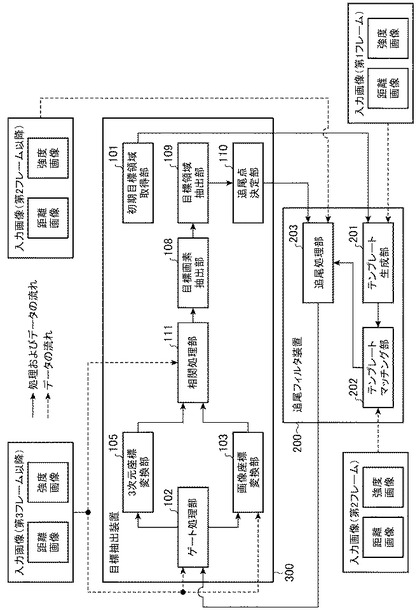
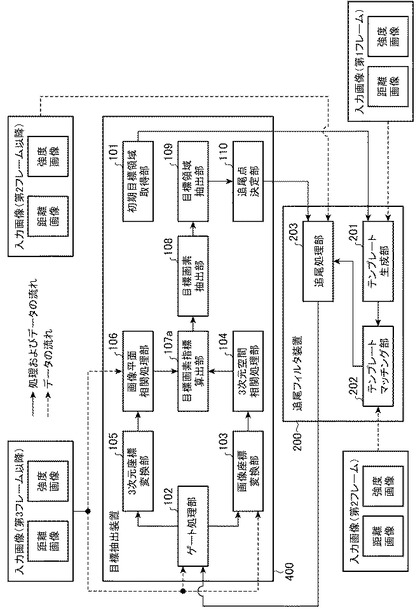
図1は、この発明の実施の形態1による追尾装置を示すブロック構成図である。図中、実線の矢印は処理およびデータの流れを示しており、破線の矢印はデータの流れを示している。
図1において、追尾装置は、目標抽出装置100と追尾フィルタ装置200により構成され、同時に取得された、同一画角の距離画像と強度画像が入力として与えられる。ここで、距離画像とは、観測面各点までの距離および反射強度を取得するセンサ(これについては図2及び図3を用いて後述する)により生成される画像であり、センサから各観測点までの距離を画素値とする。また、強度画像とは、センサにより生成される、各観測点の反射強度を画素値とする画像である。
【0011】
図1において、目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、さらに得られた2種類の相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。目標抽出装置100は、初期目標領域取得部101、ゲート処理部102、画像座標変換部103、3次元空間相関処理部104、3次元座標変換部105、画像平面相関処理部106、目標画素指標算出部107、目標画素抽出部108、目標領域抽出部109、追尾点決定部110を有している。
【0012】
初期目標領域取得部101は、この発明の追尾装置とは別の装置において取得された第1フレーム入力画像中の追尾目標を囲む最小の矩形領域の情報(例えば、矩形領域の左上と右下の画像座標)を、初期目標領域として取得する。
ゲート処理部102は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との差を表す残差2次形式の分布を算出し、さらに残差2次形式に対して閾値処理を実行し、目標画素抽出処理の対象となる画素を抽出する。以降、ゲート処理部102により抽出された画素をゲート内画素と記述する。
画像座標変換部103は、新規入力画像中の各ゲート内画素に対して、距離値と画像座標より各画素の3次元座標を算出する。
3次元空間相関処理部104は、追尾フィルタ装置200が出力した追尾予測値と、画像座標変換部103が算出した各ゲート内画素の3次元座標および強度値との間での相関値を算出する。以降、3次元空間相関処理部104が算出した相関値を3次元空間相関値と記述する。
【0013】
3次元座標変換部105は、追尾フィルタ装置200が出力した追尾予測値のうちの3次元座標を、距離値と画像座標に変換する。以降、3次元座標変換部105が算出する距離値と画像座標を予測距離値および予測画像座標と記述する。
画像平面相関処理部106は、新規入力画像における各ゲート内画素の画像座標と距離値と強度値と、3次元座標変換部105が算出した予測距離値と予測画像座標および追尾フィルタ装置200が出力する追尾予測値に含まれる予測強度の間での相関値を算出する。以降、画像平面相関処理部106が算出した相関値を画像平面相関値と記述する。
目標画素指標算出部107は、3次元空間相関値と画像平面相関値から、各ゲート内画素の目標画素らしさを表す目標画素指標を算出する。
目標画素抽出部108は、目標画素指標に対して閾値処理を実行し、目標画素を抽出する。
目標領域抽出部109は、目標画素の周辺分布を用いて領域分割を行い、新規入力画像上の目標領域を抽出する。
追尾点決定部110は、目標領域より追尾点を算出する。
【0014】
また、図1において、追尾フィルタ装置200は、第1フレーム画像入力時に、第2フレーム画像入力時に使用する追尾目標のテンプレートを生成し、第2フレーム画像入力時には、テンプレートを用いたテンプレートマッチングにより追尾点を決定し、第3フレーム以降は目標抽出装置100が出力する追尾点を取得する。さらに、得られた追尾点の画像座標と、距離画像より得られる追尾点の距離値とにより追尾点の3次元座標を算出し、3次元空間上での追尾処理を実行する。この追尾処理では、追尾点の3次元座標と3次元各方向の速度と追尾点強度の予測を行い、これらの値を予測状態ベクトル(追尾予測値)として出力する。追尾フィルタ装置200は、テンプレート生成部201、テンプレートマッチング部202、追尾処理部203を有している。
【0015】
テンプレート生成部201は、初期目標領域取得部101が取得した初期目標領域情報に基づき、第1フレーム入力画像より追尾目標のテンプレートを生成する。
テンプレートマッチング部202は、テンプレートと第2フレーム入力画像との間でマッチング処理を行い、テンプレートと最も一致した領域の中心位置を追尾点とする。
追尾処理部203は、テンプレートマッチング部202または追尾点決定部110が算出した追尾点と第2フレーム以降の新規入力画像より、追尾点の3次元座標を算出し、例えばカルマンフィルタ等の追尾フィルタを用いて、追尾点の3次元位置と3次元速度と強度の予測値を予測状態ベクトルとして算出する。
【0016】
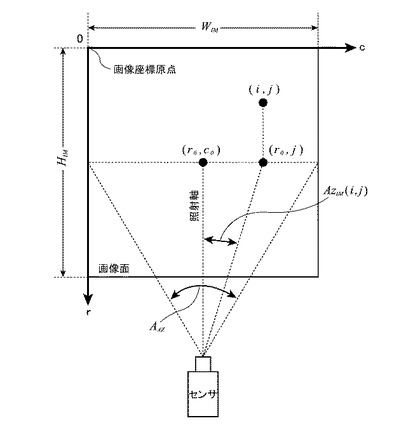
ここで、センサ位置と、画像座標および3次元座標との関係について説明する。
図2はセンサ水平角と画像座標との関係を示しており、図3はセンサ垂直角と画像座標との関係を示している。
図2において、画像中心座標を(r0,c0)、水平方向のセンサ画角をAAz、入力画像の水平方向の画素数をWIM、画素(i,j)におけるセンサ水平角をAzIM(i,j)とすると、AzIM(i,j)は式(1)より算出される。
【0017】

【0018】
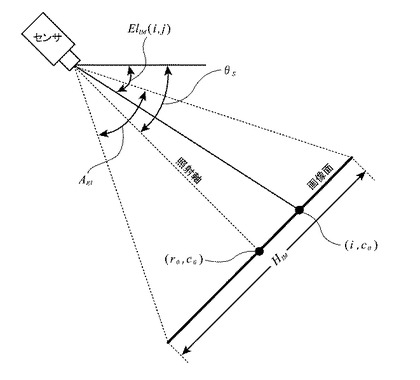
図3において、センサ俯角をθs、垂直方向のセンサ画角をAEl、入力画像の垂直方向の画素数をHIM、画素(i,j)におけるセンサ垂直角をElIM(i,j)とすると、ElIM(i,j)は式(2)より算出される。
【0019】
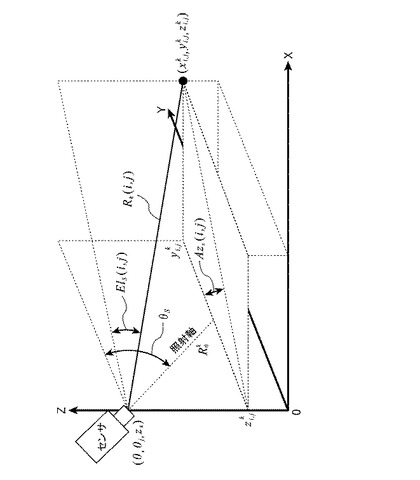
図4は第kフレームにおける画素(i,j)の3次元座標(xki,j,yki,j,zki,j)と、センサ位置と、画素(i,j)の距離値と、(xki,j,yki,j,zki,j)に対する方位角Azs(i,j)と、(xki,j,yki,j,zki,j)に対する仰角Els(i,j)との関係を示している。
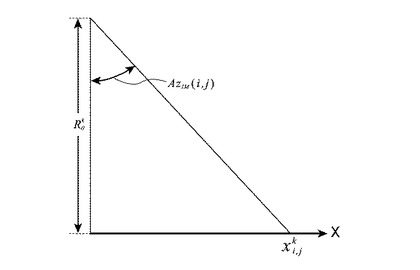
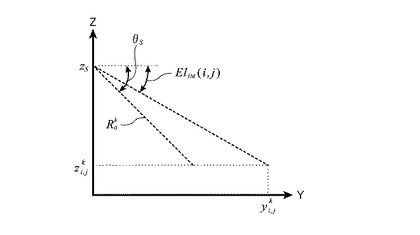
さらに、図5は第kフレームにおける画素(i,j)のx座標xki,jとセンサ水平角AzIM(i,j)との関係を示し、図6は第kフレームにおける画素(i,j)のy座標yki,jとz座標zki,jとセンサ垂直角ElIM(i,j)との関係を示している。
【0020】
図4〜図6に示した関係より、方位角Azs(i,j)は式(3)より、仰角Els(i,j)は式(4)より算出される。
【0021】
さらに、図4に示した関係より、第kフレーム画素(i,j)のx座標xki,jは式(5)より、第kフレーム画素(i,j)のy座標yki,jは式(6)より、第kフレーム画素(i,j)のz座標zki,jは式(7)より算出される。
【0022】
次に、実施の形態1による追尾装置の一連の動作について、第1フレーム画像入力時、第2フレーム画像入力時、第3フレーム以降の画像入力時に分けて説明する。なお、入力画像とは、入力される距離画像と強度画像の両方を指している。
【0023】
[第1フレーム画像入力時の動作]
まず、初期目標領域取得部101が、別装置により抽出された第1フレーム入力画像中の目標領域の情報(初期目標領域情報)を取得する。初期目標領域情報は、初期目標を囲む最小矩形の位置や大きさを示す情報であり、例えば、初期目標領域の左上隅の画像座標と右下隅の画像座標で与えられる。
次に、テンプレート生成部201が、第1フレーム入力画像より、初期目標領域情報を用いて初期目標領域内の画像をテンプレートとする。テンプレートは、第2フレーム画像入力後、追尾処理部203における追尾フィルタ初期化の際に、第2フレーム入力画像から追尾点を抽出するために使用する。ここで、テンプレートの生成に使用する画像は距離画像、強度画像どちらでもよい。あるいは両方を用いてもよい。なお、テンプレートの生成方法については公知であるため、ここでの詳細な説明は省略する。
【0024】
[第2フレーム画像入力時の動作]
第2フレーム画像入力時は、目標抽出装置100は動作せず、追尾フィルタ装置200が、追尾点の決定と、追尾処理部203における追尾フィルタの初期化と、第3フレームにおける追尾点の予測を行う。以下に追尾フィルタ装置200の動作の詳細を示す。
【0025】
追尾処理部203における追尾フィルタの初期化を行うにあたり、第2フレーム入力画像から追尾点を決定する必要がある。そこで、まず、テンプレートマッチング部202が、テンプレート生成部201が生成したテンプレートを用いて第2フレームの入力画像に対してマッチング処理を行い、最も一致度が高い入力画像中の領域の中心を第2フレームの追尾点とする。
ここで、テンプレートマッチング部202が実行するテンプレートマッチング処理については、例えばテンプレートとマッチング対象領域の、同じ位置の画素値の差分絶対値の合計を評価値とするSAD(Sum of Absolute Difference)等、一般的な処理を適用することが可能であるため、ここでのテンプレートマッチング処理についての説明は省略する。
【0026】
次に、追尾処理部203が追尾フィルタの初期化を行う。ここで、追尾フィルタは、カルマンフィルタを適用し、追尾点の{距離,仰角,方位角,強度}を観測ベクトルとする。なお、追尾点の方位角および仰角は、追尾点の画像座標から式(3)および式(4)より算出する。また、追尾フィルタは、追尾点の{X座標,Y座標,Z座標,X軸方向速度,Y軸方向速度,Z軸方向速度,強度}を状態ベクトルとし、3次元空間上で追尾処理を行う。
追尾フィルタの初期化処理は、まず、初期目標領域の中心を第1フレームにおける追尾点とし、式(5)〜式(7)より、第1フレーム追尾点の3次元座標を求める。次に、第2フレームの追尾点の3次元座標を、式(5)〜式(7)より求める。さらに、第1フレーム追尾点の3次元座標と第2フレーム追尾点の3次元座標より、第2フレーム追尾点の3次元空間上の各軸方向の速度を算出し、第2フレーム追尾点の{X座標,Y座標,Z座標,X軸方向速度,Y軸方向速度,Z軸方向速度,強度}を平滑状態ベクトルの初期値とする。さらに、平滑誤差共分散行列の初期化を行う。
【0027】
次に、追尾処理部203は、平滑状態ベクトル初期値を用いてカルマンフィルタ予測処理を実行し、追尾点の予測状態ベクトルを算出する。予測状態ベクトルは、{追尾点の第3フレームにおけるX座標予測値,追尾点の第3フレームにおけるY座標予測値,追尾点の第3フレームにおけるZ座標予測値,追尾点の第3フレームにおけるX軸方向速度予測値,追尾点の第3フレームにおけるY軸方向速度予測値,追尾点の第3フレームにおけるZ軸方向速度予測値,追尾点の第3フレームにおける強度予測値}を要素とする。
【0028】
[第3フレーム以降の画像入力時の動作]
第3フレーム以降では、まず目標抽出装置100が、1フレーム前の処理で追尾処理部203が算出した予測状態ベクトルと、新規入力画像との間で相関処理を行い、相関値の高い画素を目標画素とし、目標領域を抽出する。さらに目標領域から入力画像中の追尾点を決定する。次に、追尾フィルタ装置200が、目標抽出装置100が出力した追尾点を入力とし、追尾処理により次フレームにおける予測状態ベクトルを算出する。以下に、第3フレーム以降の処理の詳細を示す。
【0029】
まず、ゲート処理部102が、画像上の追尾点予測位置を中心とした、1フレーム前に抽出された目標領域の大きさのn倍の領域を目標抽出処理の対象範囲とする。ここで、nの値は事前に与えるものとする。
さらにゲート処理部102は、追尾処理部203が算出した予測状態ベクトルおよび残差共分散行列を用いて、入力画像各画素と予測状態ベクトルの間の差を表す残差2次形式を算出し、この残差2次形式の値が事前に定める閾値以下となる画素を相関処理の対象とする。以降、相関処理対象画素をゲート内画素と記述する。
式(8)に残差2次形式の算出式を、式(9)にゲート内画素の判定式を示す。ここで、式(9)に示したゲートサイズdは事前に与える定数であり、例えば、自由度4のχ二乗分布より決定する。式(8)のzki,jが4次元のベクトルであるので、自由度を4としている。
【0030】
【0031】
次に、画像座標変換部103が、現フレーム距離画像を用いて、ゲート内画素の3次元座標を算出する。3次元座標を求める画素の座標を(i,j)、画素(i,j)の3次元座標を(xki,j,yki,j,zki,j)とすると、図2〜図6に示した関係より、式(1)〜式(7)を用いて、(xki,j,yki,j,zki,j)を算出する。
【0032】
次に、3次元空間相関処理部104が、予測状態ベクトルから抜き出した位置と強度の値からなるベクトルP3Dを生成し、さらに、ゲート内画素(i,j)に対して画像座標変換部103が算出した3次元座標と、ゲート内画素(i,j)の強度値からなるベクトルO3Di,jを生成する。ベクトルP3Dの定義を式(10)に、ベクトルO3Di,jの定義を式(11)に示す。
【0033】
さらに、3次元空間相関処理部104は、正規化相互相関係数を用いて、ベクトルP3DとベクトルO3Di,jの3次元空間相関値NCC3D(i,j)を算出する。NCC3D(i,j)の定義を式(12)に示す。ゲート内画素(i,j)の3次元空間上での位置と追尾点の3次元空間上での予測位置が近く、さらにゲート内画素(i,j)の強度と追尾点の予測強度の差が小さい程、NCC3D(i,j)の値は高くなり、相関が高いことを示す。
【0034】
次に、3次元座標変換部105が、追尾点の3次元予測位置を距離値と画像座標に変換する。以降、追尾点の3次元予測位置から算出する距離値を予測距離値、追尾点の3次元予測位置から算出する画像座標を予測画像座標と記述する。
図2〜図6に示す関係より、3次元座標変換部105における追尾点予測位置
の3次元座標から予測距離および予測画像座標への変換式を式(13)〜式(15)に示す。
【0035】
ここで、3次元座標変換部105は、予測画像座標に代えて、式(8)に示した関数h()を用いて、予測仰角および予測方位角を算出するようにしてもよい。
【0036】
次に、画像平面相関処理部106が、3次元座標変換部105が算出した予測距離および予測画像座標および予測強度からなるベクトルP2Dを生成し、さらに、ゲート内画素(i,j)における距離値および画像座標および強度値からなるベクトルO2Di,jを生成する。ベクトルP2Dの定義を式(16)に、ベクトルO2Di,jの定義を式(17)に示す。
【0037】
ここで、画像平面相関処理部106は、3次元座標変換部105が予測仰角および予測方位角を算出した場合は、ベクトルP2Dを構成する要素のうち、予測画像座標に代えて、3次元座標変換部105が算出した予測仰角および予測方位角をベクトルP2Dの構成要素とし、ベクトルO2Di,jを構成する要素のうち、画像座標(i,j)に代えて、式(1)〜式(4)を用いて、画素(i,j)の仰角および方位角をベクトルO2Di,jの構成要素とする。
【0038】
さらに、画像平面相関処理部106は、正規化相互相関係数を用いて、ベクトルP2DとベクトルO2Di,jの画像平面相関値NCC2D(i,j)を算出する。NCC2D(i,j)の定義を式(18)に示す。ゲート内画素(i,j)の画像座標が予測画像座標に近く、且つ、ゲート内画素(i,j)の距離値と予測距離の差が小さくさらにゲート内画素(i,j)の強度と追尾点の予測強度の差が小さい程、NCC2D(i,j)の値は高くなり、相関が高いことを示す。
【0039】
次に、目標画素指標算出部107が、NCC3D(i,j)とNCC2D(i,j)とを組み合わせた目標画素指標TPIk(i,j)を算出する。目標画素指標は各画素が目標画素である確からしさを表す指標であり、全てのゲート内画素に対して算出する。式(19)にゲート内画素(i,j)における目標画素指標TPIk(i,j)の定義を示す。
NCC3D(i,j)の分布は3次元空間上における相関結果であり、目標画素の他に、追尾点の予測高度に近い高度を持つ背景画素の相関値が高くなりやすい傾向にある。一方、NCC2D(i,j)の分布は、画像平面上における相関結果であり、高度の情報は含まれない。このため、目標画素の他に、追尾点の予測画像座標周辺部の背景画素の相関値が高くなりやすい傾向にある。
そこで、目標画素指標算出部107は、相関値が高くなる背景画素の傾向が異なるNCC3D(i,j)とNCC2D(i,j)を組み合わせることで背景画素の目標画素指標値を低減し、誤抽出を抑制している。
【0040】
次に、目標画素抽出部108が、目標画素指標の分布に基づいた閾値処理により目標画素を抽出する。目標画素の抽出に用いる閾値の算出式を式(20)に、目標画素判定条件を式(21)に示す。式(21)では、目標画素指標が閾値を超えたゲート内画素を目標画素と判定し、2次元配列TgtPixkの当該画素位置に1を立て、目標画素でないと判定されれば当該画素位置に0を立てる。以降、2次元配列TgtPixkを目標画素格納配列と記述する。
【0041】
次に、目標領域抽出部109が、目標画素格納配列における目標画素(すなわち値が1の画素)の分布状況を基に領域分割を行い、1フレーム前に抽出した目標領域に大きさが最も近い領域を現フレームの目標領域とする。なお、目標画素格納配列における目標画素には、真の目標画素に加え、誤抽出された背景画素が含まれる場合もある。以下に目標領域抽出部109の動作を示す。
【0042】
まず、目標画素格納配列の水平方向の周辺分布を求める。式(22)に列座標jの周辺分布の定義を示す。
【0043】
次に、水平方向の周辺分布に対して閾値処理を行い、目標画素が存在する領域の左右両端を検出する。例えば、周辺画素分布MDWk(j1−1)が閾値以下であり、MDWk(j1)が閾値を超える場合、列座標j1を目標画素が存在する領域の左端とする。また、MDWk(j2)が閾値を超え、MDWk(j2+1)が閾値以下の場合、列座標j2を目標画素が存在する領域の右端とする。この時、閾値処理に用いる閾値は事前に設定してもよいし、求めた周辺分布より算出してもよい。なお、目標画素抽出部108の処理において背景画素が誤抽出された場合は、複数組の左右両端が抽出される場合もある。
【0044】
次に、目標画素格納配列を、目標画素領域両端で挟まれる領域に分割し、分割領域毎に垂直方向の周辺分布を求める。式(23)に、n番目の分割領域における垂直方向の周辺分布の定義を示す。
【0045】
次に、分割領域毎に、垂直方向の周辺分布に対して、水平方向の周辺分布における処理と同様の閾値処理を行い、目標画素が存在する領域の上下端を求める。この時、閾値処理に用いる閾値は事前に設定してもよいし、求めた周辺分布より算出してもよい。
次に、抽出した各分割領域の水平・垂直方向の大きさと、1フレーム前に抽出した目標領域の水平・垂直方向の大きさを比較し、1フレーム前に抽出した目標領域の大きさに最も近い分割領域を現フレームの目標領域とする。
次に、追尾点決定部110が、目標領域抽出部109が抽出した目標領域の中心画像座標を追尾点とし、追尾処理部203に出力する。
【0046】
次に、追尾処理部203が、追尾点の画像座標を、式(3)および式(4)を用いて方位角および仰角に変換し、入力画像から取得する追尾点の距離値および強度値と合わせて観測ベクトルを生成する。観測ベクトルは{追尾点の距離,追尾点の仰角,追尾点の方位角,追尾点の強度}を要素とする。
さらに、追尾処理部203は、観測ベクトルと、1フレーム前に追尾処理部203が算出した予測状態ベクトルを用いて、カルマンフィルタによる平滑処理を実行し、平滑状態ベクトルを算出する。平滑状態ベクトルは、{追尾点のX座標平滑値,追尾点のY座標平滑値,追尾点のZ座標平滑値,追尾点のX軸方向速度平滑値,追尾点のY軸方向速度平滑値,追尾点のZ軸方向速度平滑値,追尾点の強度平滑値}を要素とする。
【0047】
さらに、追尾処理部203は、平滑状態ベクトルを用いて、カルマンフィルタ予測処理を実行し、追尾点の予測状態ベクトルを算出する。予測状態ベクトルは、{追尾点の次フレームにおけるX座標予測値,追尾点の次フレームにおけるY座標予測値,追尾点の次フレームにおけるZ座標予測値,追尾点の次フレームにおけるX軸方向速度予測値,追尾点の次フレームにおけるY軸方向速度予測値,追尾点の次フレームにおけるZ軸方向速度予測値,追尾点の次フレームにおける強度予測値}を要素とする。
【0048】
以上のように、実施の形態1の追尾装置によれば、目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、目標抽出装置は、追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、目標領域に基づいて追尾点を算出して追尾点を追尾フィルタ装置に出力し、追尾フィルタ装置は、目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って追尾予測値を出力するようにしたので、テンプレートマッチングと比べて目標領域の抽出精度を向上させることができると共に、抽出処理負荷の低減を図ることができる。
【0049】
また、実施の形態1の追尾装置によれば、目標抽出装置は、初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、追尾フィルタ装置が算出した追尾予測値と入力画像との差を表す残差2次形式を算出し、残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置および予測強度を要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標および強度を要素とするベクトルを用いて、追尾空間である3次元空間での相関処理を行う3次元空間相関処理部と、3次元座標変換部が算出した追尾点の予測画像座標および予測距離と予測強度を要素とするベクトルと、入力画像各画素の画像座標および距離および強度を要素とするベクトルを用いて、画像平面上の相関処理を行う画像平面相関処理部と、3次元空間相関処理部が算出した相関値と、画像平面相関処理部が算出した相関値を組み合わせて、入力画像各画素が目標画素である確からしさを表す目標画素指標を算出する目標画素指標算出部と、目標画素指標に対して閾値処理を行い、入力画像中の目標画素を抽出する目標画素抽出部と、目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、目標領域抽出部が抽出した目標領域より追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、追尾フィルタ装置は、初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、第2フレーム画像入力時に、テンプレートを用いて第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、テンプレートマッチング部が決定した追尾点または追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたので次のような効果がある。
【0050】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と強度値による相関と、観測平面である画像平面上の位置と距離値と強度値による相関の、次元の異なる2種類の相関処理を組み合わせることにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0051】
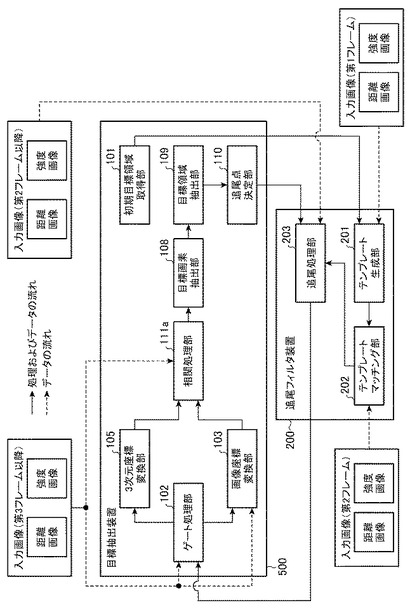
実施の形態2.
図7は、この発明の実施の形態2による追尾装置の構成を示すブロック構成図である。図7に示す追尾装置において、実施の形態1と異なるのは目標抽出装置300における相関処理部111の構成である。即ち、実施の形態2の目標抽出装置300は、初期目標領域取得部101、ゲート処理部102、画像座標変換部103、3次元座標変換部105、目標画素抽出部108、目標領域抽出部109、追尾点決定部110、相関処理部111を備えている。以下、相関処理部111以外の構成については実施の形態1と同様であるため、これらの説明は省略し、相関処理部111についてのみ説明する。
【0052】
相関処理部111は、追尾処理部203が算出した予測状態ベクトルから得られる、予測位置の3次元座標および予測強度と、3次元座標変換部105が算出した予測距離および予測画像座標を要素とするベクトルPAを生成する。PAの定義を式(24)に示す。
さらに相関処理部111は、ゲート処理部102が抽出したゲート内画素に対して、ゲート内画素の画像座標を(i,j)とすると、画像座標変換部103が算出した3次元座標と、距離と、画像座標と、強度を要素とするベクトルOAi,jを生成する。式(25)にOAi,jの定義を示す。
【0053】
ここで、相関処理部111は、3次元座標変換部105が予測仰角および予測方位角を算出した場合は、ベクトルPAを構成する要素のうち、予測画像座標に代えて、3次元座標変換部105が算出した予測仰角および予測方位角をベクトルPAの構成要素とし、ベクトルOAi,jを構成する要素のうち、画像座標(i,j)に代えて、式(1)〜式(4)を用いて、画素(i,j)の仰角および方位角をベクトルOAi,jの構成要素とする。
さらに相関処理部111は、ベクトルPAと、ベクトルOAi,jの正規化相互相関係数を算出し、目標画素指標TPIk(i,j)とする。目標画素指標TPIk(i,j)の定義を式(26)に示す。
【0054】
以上のように、本発明の実施の形態2による追尾装置によれば、目標抽出装置は、初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、追尾フィルタ装置が出力する追尾予測値と入力画像との差を表す残差2次形式を算出し、残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、相関処理結果を入力画像各画素が目標画素である確からしさを表す目標画素指標とする相関処理部と、目標画素指標に対して閾値処理を行い、入力画像中の目標画素を抽出する目標画素抽出部と、目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、目標領域抽出部が抽出した目標領域より追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、追尾フィルタ装置は、初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、第2フレーム画像入力時に、テンプレートを用いて第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、テンプレートマッチング部が決定した追尾点または追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたので次のような効果がある。
【0055】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と、画像平面上の位置と、距離値と、強度値の、3次元空間上と観測平面上の異なる次元により得られる値を組み合わせたベクトルの相関を取ることにより、背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0056】
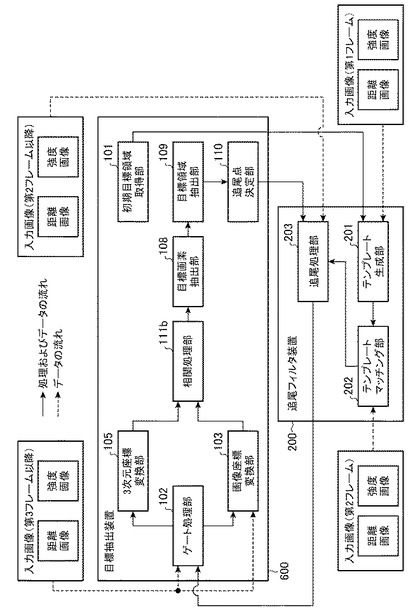
実施の形態3.
図8は、この発明の実施の形態3による追尾装置の構成を示すブロック構成図である。実施の形態3による追尾装置は、目標抽出装置400における目標画素指標算出部107aだけが実施の形態1による追尾装置の目標画素指標算出部107と異なり、他は全て同じであるため、以下、目標画素指標算出部107aについてのみ説明する。
【0057】
目標画素指標算出部107aは、3次元空間相関処理部104が算出した3次元相関値NCC3D(i,j)と、画像平面相関処理部106が算出した画像平面相関値NCC2D(i,j)を統合した統合相関値NCCMLT(i,j)を、式(27)を用いて算出し、さらに、式(28)より目標画素指標TPIk(i,j)を算出する。
式(28)では、画素(i,j)を中心とした(2b−1)×(2b−1)の大きさの領域(以降、画素(i,j)の近傍領域と記述する)内のNCCMLTの平均値でNCCMLT(i,j)を補正し、TPIk(i,j)としている。なお、画素(i,j)の近傍領域は画素(i,j)を含まない。また、bは近傍領域の大きさを与えるパラメータであり、その値は事前に設定されるものとする。
【0058】
目標画素指標算出部107aにより、NCCMLTの値が高い画素が密集している領域と、NCCMLTの値が低い画素が密集している領域とでは、TPIkの差が広がり、NCCMLTの値が高い、すなわち追尾予測値との相関が高い領域が相対的に強調される。
一方、NCCMLTが高い画素が孤立して存在する場合、このような孤立画素は相関値が高い背景画素である可能性が高いと考えられる。このような孤立画素の近傍領域のNCCMLTは低い値を取るので、孤立画素のTPIkの値は低く抑えられる。すなわち、背景画素の誤抽出を抑制することができる。
【0059】
以上のように、本発明の実施の形態3による追尾装置によれば、目標画素指標算出部は、3次元空間相関処理部が算出した相関処理結果と、画像平面相関処理部が算出した相関処理結果を掛け合わせた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、次のような効果がある。
【0060】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と強度値による相関と、観測平面である画像平面上の位置と距離値と強度値による相関の、次元の異なる2種類の相関処理を組み合わせ、さらに、相関値が高い領域が、相関値が低い領域よりも強調されるように相関値の補正処理を行うことにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0061】
実施の形態4.
図9は、この発明の実施の形態4による追尾装置の構成を示すブロック構成図である。実施の形態4による追尾装置は、目標抽出装置500における相関処理部111aだけが実施の形態2による追尾装置の相関処理部111と異なり、他は全て同じであるので、以下、相関処理部111aについてのみ説明する。
【0062】
相関処理部111aは、実施の形態2による追尾装置の相関処理部111と同様に、式(24)に示すベクトルPA、および、式(25)に示すベクトルOAi,jを生成する。さらに、相関処理部111aは、正規化相互相関係数を用いて、ベクトルPAおよびベクトルOAi,jより相関値NCCA(i,j)を算出する。相関値NCCA(i,j)の算出式を式(29)に示す。
【0063】
さらに、画素(i,j)を中心とした、(2b−1)×(2b−1)の大きさの近傍領域に含まれる画素のNCCAの平均値でNCCA(i,j)を補正し、目標画素指標TPIk(i,j)を算出する。目標画素指標TPIk(i,j)の算出式を式(30)に示す。
【0064】
以上のように、本発明の実施の形態4による追尾装置によれば、相関処理部は、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、得られた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、次のような効果がある。
【0065】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、3次元空間上の位置と、画像平面上の位置と、距離値と、強度値の、追尾空間上と観測平面上の異なる次元により得られる値を組み合わせたベクトルの相関値を算出し、さらに、相関値が高い領域が、相関値が低い領域よりも強調されるように相関値の補正処理を行うことにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0066】
実施の形態5.
図10は、この発明の実施の形態5による追尾装置の構成を示すブロック構成図である。実施の形態5による追尾装置は、目標抽出装置600における相関処理部111b以外の処理は、実施の形態2による追尾装置の目標抽出装置300が備えるものと同じであるので、以下、相関処理部111bの処理についてのみ説明する。
【0067】
相関処理部111bは、実施の形態2による追尾装置の相関処理部111と同様に、正規化相互相関係数の値を目標画素指標とするが、正規化相互相関係数を算出するベクトルPAおよびベクトルOAi,jの要素を、以下の4つとする。
(1)ゲート相関処理部102が算出した残差2次形式値
(2)3次元空間X座標
(3)3次元空間Y座標
(4)3次元空間Z座標
【0068】
すなわち、ベクトルPAは、3次元座標変換部105より算出される追尾予測位置の画像座標における残差2次形式の値と、追尾予測値の3次元X、Y、Z座標を要素とし、ベクトルOAi,jは、画素(i,j)における残差2次形式値と、画像座標変換部103より算出される画素(i,j)と対応する3次元X、Y、Z座標を要素とする。
目標画素指標TPIk(i,j)の定義を式(31)に示す。
【0069】
このように、実施の形態5による追尾装置では、相関処理部111bは、追尾フィルタ装置200の状態量に基づく相関値である残差2次形式値と、予測位置および入力画像各画素の3次元位置を組み合わせたベクトルによる正規化相互相関係数を目標画素指標とすることにより、残差2次形式により高い相関値が得られた目標画素はそのまま高い相関が維持され、残差2次形式の相関が高い背景画素が得られたとしても、予測位置との位置のズレにより目標画素指標は低く抑えられるため、背景画素の誤抽出を低減し、目標画素の抽出率を向上させる効果がある。また、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0070】
なお、上記実施の形態5は、実施の形態2による追尾装置における相関処理部111を相関処理部111bに置き換える場合について示したが、実施の形態4による追尾装置における相関処理部111aを相関処理部111bに置き換えても同様の効果が得られる。ただし、この場合、相関処理部111bは相関処理部111aの機能を全て備えるものとする。
【0071】
以上説明したように、実施の形態5の追尾装置によれば、相関処理部は、追尾点予測位置の画像座標における残差2次形式値と追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、これを目標画素指標とするようにしたので、背景画素の誤抽出を低減し、目標画素の抽出率を向上させることができると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0072】
また、実施の形態5の追尾装置によれば、相関処理部は、追尾点予測位置の画像座標における残差2次形式値と追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、得られた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、背景画素の誤抽出を低減し、目標画素の抽出率を向上させることができると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0073】
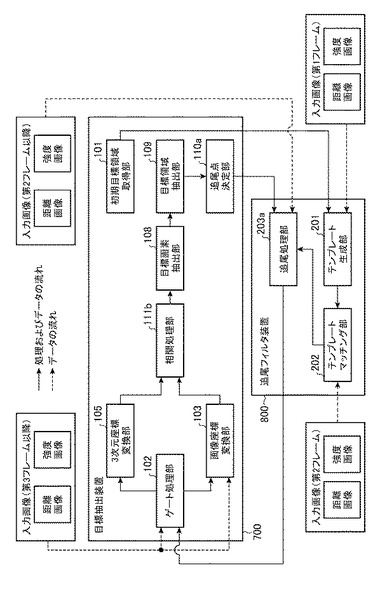
実施の形態6.
図11は、この発明の実施の形態6による追尾装置の構成を示すブロック構成図である。
実施の形態6による追尾装置は、目標抽出装置700における追尾点決定部110aと、追尾フィルタ装置800における追尾処理部203a以外は、実施の形態5による追尾装置が備えるものと同じであるので、以下、追尾点決定部110aと追尾処理部203aの処理についてのみ説明する。
【0074】
上述した実施の形態1〜5による追尾装置では、追尾フィルタ装置200への入力である観測ベクトルの要素に加える強度値として追尾点座標における強度値を設定している。目標画素の強度にばらつきがあり、追尾点強度値と他の目標画素の強度に差があると、目標画素の残差2次形式値のばらつきも大きくなる可能性があり、この様な場合は、残差2次形式に対する閾値処理において目標画素の抽出漏れが発生する恐れがある。また、実施の形態5による追尾装置では、残差2次形式値を用いて正規化相互相関係数を求め、目標画素指標としているので、目標画素の残差2次形式値のばらつきが大きいと、相関値の低い目標画素が発生し、目標画素の抽出漏れが起きる可能性がある。
そこで、実施の形態6による追尾装置では、目標画素の残差2次形式値のばらつきを抑えて目標画素の相関を全体的に高く保つための処理を、追尾点決定部110aと追尾処理部203aが備える。
【0075】
追尾点決定部110aにおいて、目標領域抽出部109が抽出した目標領域から追尾点の位置を決定する処理は実施の形態5による追尾装置の追尾点決定部110と同じであるが、追尾点決定部110aは、さらに目標領域抽出部109が抽出した目標領域内の平均強度と、目標領域内の強度の標準偏差を算出し、追尾点座標と、目標領域内の平均強度と、目標領域内の強度の標準偏差を追尾処理部203aに対して出力する。
【0076】
次に、追尾処理部203aは、式(3)および式(4)を用いて、追尾点決定部110aより入力される追尾点座標から仰角および方位角を求め、追尾点座標の距離値と、追尾点の仰角と、追尾点の方位角と、追尾点決定部110aより入力される目標領域内の平均強度から観測ベクトルを生成する。すなわち、観測ベクトルは{追尾点距離,追尾点仰角,追尾点方位角,目標領域平均強度}となる。
【0077】
さらに、追尾処理部203aは、追尾点決定部110aより入力される目標領域内の強度の標準偏差を、強度の観測雑音標準偏差に設定する。ここで、観測雑音標準偏差は追尾フィルタ装置200のパラメータであり、追尾フィルタ装置200の入力である観測ベクトルの各要素値の揺らぎ量を与えるものである。実施の形態1〜5による追尾装置では、観測雑音標準偏差は事前に想定される値(固定値)を追尾フィルタ装置200に設定しているが、実施の形態6による追尾装置では、強度の観測雑音標準偏差に関しては、毎フレーム抽出された目標領域内の強度の標準偏差を設定する。
また、追尾処理部203aの観測ベクトル生成が実行され、強度の観測雑音標準偏差を設定した後は、実施の形態5による追尾装置の追尾処理部203と同じ処理を実行する。
【0078】
なお、上記実施の形態6では、観測ベクトルの要素とする強度値を目標領域の平均値としているが、例えば、中央値を用いても同様の効果が得られる。
【0079】
このように、実施の形態6の追尾装置では、観測ベクトルの要素である強度値に抽出した目標領域の平均強度を設定し、追尾フィルタ装置200のパラメータである強度の観測雑音標準偏差に毎フレーム抽出した目標領域の強度の標準偏差を設定することにより、目標画素の残差2次形式値のばらつきが抑えられ、目標画素の相関値が全体的に高く保たれる効果がある。また、目標画素の相関値が全体的に高くなることにより目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上するという効果がある。さらに、画像中の目標の大きさや向きの変化に対する影響を受けにくく、また、テンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果もある。
【0080】
以上説明したように、実施の形態6の追尾装置によれば、追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、目標領域内の平均強度および強度の標準偏差を算出し、追尾処理部は、観測ベクトルの要素の一つである強度として、追尾点決定部が算出した目標領域の平均強度を設定し、さらに、毎フレーム追尾点決定部が算出した目標領域の強度の標準偏差を、強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定するようにしたので、目標画素の相関値が全体的に高く保たれ、目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上すると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0081】
また、実施の形態6の追尾装置によれば、追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、目標領域内の強度の中央値および強度の標準偏差を算出し、追尾処理部は、観測ベクトルの要素の一つである強度として、追尾点決定部が算出した目標領域の強度中央値を設定し、さらに、毎フレーム追尾点決定部が算出した目標領域の強度の標準偏差を、強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定するようにしたので、目標画素の相関値が全体的に高く保たれ、目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上すると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0082】
尚、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0083】
100,300,400,500,600,700 目標抽出装置、101 初期目標領域取得部、102 ゲート処理部、103 画像座標変換部、104 3次元空間相関処理部、105 3次元座標変換部、106 画像平面相関処理部、107,107a 目標画素指標算出部、108 目標画素抽出部、109 目標領域抽出部、110,110a 追尾点決定部、111,111a,111b 相関処理部、200 追尾フィルタ装置、201 テンプレート生成部、202 テンプレートマッチング部、203,203a 追尾処理部。
【技術分野】
【0001】
この発明は、連続観測された画像中の目標物を追尾する追尾装置に関する。
【背景技術】
【0002】
連続観測された画像中の目標物の追尾を行う追尾装置において、重要な処理の一つとして、新規に入力された画像から追尾対象となる目標を抽出する目標抽出処理が挙げられる。
画像中の目標を抽出する(あるいは、目標位置を検出する)ための従来技術としては、テンプレートマッチングが一般的である。テンプレートマッチングは、事前に用意した追尾目標のテンプレートと新規画像の間で差分処理等を行い、最もテンプレートと画素の分布が類似する領域を抽出する処理である。テンプレートは事前に用意するため、画像中の追尾目標はテンプレートと大きさや向きが一致する保証が無く、誤抽出が発生する可能性が高い。そこで、例えば特許文献1に記載された追尾装置では、最新の入力画像を用いてテンプレートを更新することで画像中の追尾目標とテンプレートとの差異を小さくし、誤抽出を抑制するようにしていた。
【0003】
また、追尾目標の大きさや向きが時間の経過とともに変化する場合に対応するため、複数のテンプレートを保持する方法も提案されている。例えば特許文献2には、複数のテンプレートを保持し、さらに最新入力画像より生成したテンプレートを保持するテンプレート群に追加することで誤抽出を抑制する方法が示されている。さらに、特許文献3には、大きさの異なるテンプレートを複数保持することで誤抽出を抑制する方法が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−236508号公報
【特許文献2】特許第3768073号公報
【特許文献3】特開2001−243476号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、画像中の追尾目標とテンプレートとの差異を完全に無くすことは不可能であり、テンプレートを用いた目標抽出処理では誤抽出の発生は避けられない。さらに、誤抽出を抑制するためのテンプレートの更新や複数テンプレートによる抽出処理は処理負荷が増大するという問題もあった。
【0006】
この発明は上記のような問題点を解決するためになされたもので、テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る追尾装置は、目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、目標抽出装置は、追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、目標領域に基づいて追尾点を算出して追尾点を追尾フィルタ装置に出力し、追尾フィルタ装置は、目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って追尾予測値を出力するようにしたものである。
【発明の効果】
【0008】
この発明の追尾装置は、追尾フィルタ装置によって、3次元空間上での追尾点の位置、速度、強度の予測を行い、目標抽出装置は、追尾フィルタ装置が出力する追尾予測値と新規入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素を抽出するようにしたので、テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1の追尾装置を示す構成図である。
【図2】この発明の実施の形態1の追尾装置におけるセンサ水平角と画像座標との関係を示す説明図である。
【図3】この発明の実施の形態1の追尾装置におけるセンサ垂直角と画像座標との関係を示す説明図である。
【図4】この発明の実施の形態1の追尾装置における第kフレームにおける画素の3次元座標と、センサ位置と、画素の距離値と、画素の3次元座標に対する方位角と仰角との関係を示す説明図である。
【図5】この発明の実施の形態1の追尾装置における第kフレームにおける画素のx座標とセンサ水平角との関係を示す説明図である。
【図6】この発明の実施の形態1の追尾装置における第kフレームにおける画素のy座標とz座標とセンサ垂直角との関係を示す説明図である。
【図7】この発明の実施の形態2の追尾装置を示す構成図である。
【図8】この発明の実施の形態3の追尾装置を示す構成図である。
【図9】この発明の実施の形態4の追尾装置を示す構成図である。
【図10】この発明の実施の形態5の追尾装置を示す構成図である。
【図11】この発明の実施の形態6の追尾装置を示す構成図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、この発明の実施の形態1による追尾装置を示すブロック構成図である。図中、実線の矢印は処理およびデータの流れを示しており、破線の矢印はデータの流れを示している。
図1において、追尾装置は、目標抽出装置100と追尾フィルタ装置200により構成され、同時に取得された、同一画角の距離画像と強度画像が入力として与えられる。ここで、距離画像とは、観測面各点までの距離および反射強度を取得するセンサ(これについては図2及び図3を用いて後述する)により生成される画像であり、センサから各観測点までの距離を画素値とする。また、強度画像とは、センサにより生成される、各観測点の反射強度を画素値とする画像である。
【0011】
図1において、目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、さらに得られた2種類の相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。目標抽出装置100は、初期目標領域取得部101、ゲート処理部102、画像座標変換部103、3次元空間相関処理部104、3次元座標変換部105、画像平面相関処理部106、目標画素指標算出部107、目標画素抽出部108、目標領域抽出部109、追尾点決定部110を有している。
【0012】
初期目標領域取得部101は、この発明の追尾装置とは別の装置において取得された第1フレーム入力画像中の追尾目標を囲む最小の矩形領域の情報(例えば、矩形領域の左上と右下の画像座標)を、初期目標領域として取得する。
ゲート処理部102は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との差を表す残差2次形式の分布を算出し、さらに残差2次形式に対して閾値処理を実行し、目標画素抽出処理の対象となる画素を抽出する。以降、ゲート処理部102により抽出された画素をゲート内画素と記述する。
画像座標変換部103は、新規入力画像中の各ゲート内画素に対して、距離値と画像座標より各画素の3次元座標を算出する。
3次元空間相関処理部104は、追尾フィルタ装置200が出力した追尾予測値と、画像座標変換部103が算出した各ゲート内画素の3次元座標および強度値との間での相関値を算出する。以降、3次元空間相関処理部104が算出した相関値を3次元空間相関値と記述する。
【0013】
3次元座標変換部105は、追尾フィルタ装置200が出力した追尾予測値のうちの3次元座標を、距離値と画像座標に変換する。以降、3次元座標変換部105が算出する距離値と画像座標を予測距離値および予測画像座標と記述する。
画像平面相関処理部106は、新規入力画像における各ゲート内画素の画像座標と距離値と強度値と、3次元座標変換部105が算出した予測距離値と予測画像座標および追尾フィルタ装置200が出力する追尾予測値に含まれる予測強度の間での相関値を算出する。以降、画像平面相関処理部106が算出した相関値を画像平面相関値と記述する。
目標画素指標算出部107は、3次元空間相関値と画像平面相関値から、各ゲート内画素の目標画素らしさを表す目標画素指標を算出する。
目標画素抽出部108は、目標画素指標に対して閾値処理を実行し、目標画素を抽出する。
目標領域抽出部109は、目標画素の周辺分布を用いて領域分割を行い、新規入力画像上の目標領域を抽出する。
追尾点決定部110は、目標領域より追尾点を算出する。
【0014】
また、図1において、追尾フィルタ装置200は、第1フレーム画像入力時に、第2フレーム画像入力時に使用する追尾目標のテンプレートを生成し、第2フレーム画像入力時には、テンプレートを用いたテンプレートマッチングにより追尾点を決定し、第3フレーム以降は目標抽出装置100が出力する追尾点を取得する。さらに、得られた追尾点の画像座標と、距離画像より得られる追尾点の距離値とにより追尾点の3次元座標を算出し、3次元空間上での追尾処理を実行する。この追尾処理では、追尾点の3次元座標と3次元各方向の速度と追尾点強度の予測を行い、これらの値を予測状態ベクトル(追尾予測値)として出力する。追尾フィルタ装置200は、テンプレート生成部201、テンプレートマッチング部202、追尾処理部203を有している。
【0015】
テンプレート生成部201は、初期目標領域取得部101が取得した初期目標領域情報に基づき、第1フレーム入力画像より追尾目標のテンプレートを生成する。
テンプレートマッチング部202は、テンプレートと第2フレーム入力画像との間でマッチング処理を行い、テンプレートと最も一致した領域の中心位置を追尾点とする。
追尾処理部203は、テンプレートマッチング部202または追尾点決定部110が算出した追尾点と第2フレーム以降の新規入力画像より、追尾点の3次元座標を算出し、例えばカルマンフィルタ等の追尾フィルタを用いて、追尾点の3次元位置と3次元速度と強度の予測値を予測状態ベクトルとして算出する。
【0016】
ここで、センサ位置と、画像座標および3次元座標との関係について説明する。
図2はセンサ水平角と画像座標との関係を示しており、図3はセンサ垂直角と画像座標との関係を示している。
図2において、画像中心座標を(r0,c0)、水平方向のセンサ画角をAAz、入力画像の水平方向の画素数をWIM、画素(i,j)におけるセンサ水平角をAzIM(i,j)とすると、AzIM(i,j)は式(1)より算出される。
【0017】
【0018】
図3において、センサ俯角をθs、垂直方向のセンサ画角をAEl、入力画像の垂直方向の画素数をHIM、画素(i,j)におけるセンサ垂直角をElIM(i,j)とすると、ElIM(i,j)は式(2)より算出される。
【0019】
図4は第kフレームにおける画素(i,j)の3次元座標(xki,j,yki,j,zki,j)と、センサ位置と、画素(i,j)の距離値と、(xki,j,yki,j,zki,j)に対する方位角Azs(i,j)と、(xki,j,yki,j,zki,j)に対する仰角Els(i,j)との関係を示している。
さらに、図5は第kフレームにおける画素(i,j)のx座標xki,jとセンサ水平角AzIM(i,j)との関係を示し、図6は第kフレームにおける画素(i,j)のy座標yki,jとz座標zki,jとセンサ垂直角ElIM(i,j)との関係を示している。
【0020】
図4〜図6に示した関係より、方位角Azs(i,j)は式(3)より、仰角Els(i,j)は式(4)より算出される。
【0021】
さらに、図4に示した関係より、第kフレーム画素(i,j)のx座標xki,jは式(5)より、第kフレーム画素(i,j)のy座標yki,jは式(6)より、第kフレーム画素(i,j)のz座標zki,jは式(7)より算出される。
【0022】
次に、実施の形態1による追尾装置の一連の動作について、第1フレーム画像入力時、第2フレーム画像入力時、第3フレーム以降の画像入力時に分けて説明する。なお、入力画像とは、入力される距離画像と強度画像の両方を指している。
【0023】
[第1フレーム画像入力時の動作]
まず、初期目標領域取得部101が、別装置により抽出された第1フレーム入力画像中の目標領域の情報(初期目標領域情報)を取得する。初期目標領域情報は、初期目標を囲む最小矩形の位置や大きさを示す情報であり、例えば、初期目標領域の左上隅の画像座標と右下隅の画像座標で与えられる。
次に、テンプレート生成部201が、第1フレーム入力画像より、初期目標領域情報を用いて初期目標領域内の画像をテンプレートとする。テンプレートは、第2フレーム画像入力後、追尾処理部203における追尾フィルタ初期化の際に、第2フレーム入力画像から追尾点を抽出するために使用する。ここで、テンプレートの生成に使用する画像は距離画像、強度画像どちらでもよい。あるいは両方を用いてもよい。なお、テンプレートの生成方法については公知であるため、ここでの詳細な説明は省略する。
【0024】
[第2フレーム画像入力時の動作]
第2フレーム画像入力時は、目標抽出装置100は動作せず、追尾フィルタ装置200が、追尾点の決定と、追尾処理部203における追尾フィルタの初期化と、第3フレームにおける追尾点の予測を行う。以下に追尾フィルタ装置200の動作の詳細を示す。
【0025】
追尾処理部203における追尾フィルタの初期化を行うにあたり、第2フレーム入力画像から追尾点を決定する必要がある。そこで、まず、テンプレートマッチング部202が、テンプレート生成部201が生成したテンプレートを用いて第2フレームの入力画像に対してマッチング処理を行い、最も一致度が高い入力画像中の領域の中心を第2フレームの追尾点とする。
ここで、テンプレートマッチング部202が実行するテンプレートマッチング処理については、例えばテンプレートとマッチング対象領域の、同じ位置の画素値の差分絶対値の合計を評価値とするSAD(Sum of Absolute Difference)等、一般的な処理を適用することが可能であるため、ここでのテンプレートマッチング処理についての説明は省略する。
【0026】
次に、追尾処理部203が追尾フィルタの初期化を行う。ここで、追尾フィルタは、カルマンフィルタを適用し、追尾点の{距離,仰角,方位角,強度}を観測ベクトルとする。なお、追尾点の方位角および仰角は、追尾点の画像座標から式(3)および式(4)より算出する。また、追尾フィルタは、追尾点の{X座標,Y座標,Z座標,X軸方向速度,Y軸方向速度,Z軸方向速度,強度}を状態ベクトルとし、3次元空間上で追尾処理を行う。
追尾フィルタの初期化処理は、まず、初期目標領域の中心を第1フレームにおける追尾点とし、式(5)〜式(7)より、第1フレーム追尾点の3次元座標を求める。次に、第2フレームの追尾点の3次元座標を、式(5)〜式(7)より求める。さらに、第1フレーム追尾点の3次元座標と第2フレーム追尾点の3次元座標より、第2フレーム追尾点の3次元空間上の各軸方向の速度を算出し、第2フレーム追尾点の{X座標,Y座標,Z座標,X軸方向速度,Y軸方向速度,Z軸方向速度,強度}を平滑状態ベクトルの初期値とする。さらに、平滑誤差共分散行列の初期化を行う。
【0027】
次に、追尾処理部203は、平滑状態ベクトル初期値を用いてカルマンフィルタ予測処理を実行し、追尾点の予測状態ベクトルを算出する。予測状態ベクトルは、{追尾点の第3フレームにおけるX座標予測値,追尾点の第3フレームにおけるY座標予測値,追尾点の第3フレームにおけるZ座標予測値,追尾点の第3フレームにおけるX軸方向速度予測値,追尾点の第3フレームにおけるY軸方向速度予測値,追尾点の第3フレームにおけるZ軸方向速度予測値,追尾点の第3フレームにおける強度予測値}を要素とする。
【0028】
[第3フレーム以降の画像入力時の動作]
第3フレーム以降では、まず目標抽出装置100が、1フレーム前の処理で追尾処理部203が算出した予測状態ベクトルと、新規入力画像との間で相関処理を行い、相関値の高い画素を目標画素とし、目標領域を抽出する。さらに目標領域から入力画像中の追尾点を決定する。次に、追尾フィルタ装置200が、目標抽出装置100が出力した追尾点を入力とし、追尾処理により次フレームにおける予測状態ベクトルを算出する。以下に、第3フレーム以降の処理の詳細を示す。
【0029】
まず、ゲート処理部102が、画像上の追尾点予測位置を中心とした、1フレーム前に抽出された目標領域の大きさのn倍の領域を目標抽出処理の対象範囲とする。ここで、nの値は事前に与えるものとする。
さらにゲート処理部102は、追尾処理部203が算出した予測状態ベクトルおよび残差共分散行列を用いて、入力画像各画素と予測状態ベクトルの間の差を表す残差2次形式を算出し、この残差2次形式の値が事前に定める閾値以下となる画素を相関処理の対象とする。以降、相関処理対象画素をゲート内画素と記述する。
式(8)に残差2次形式の算出式を、式(9)にゲート内画素の判定式を示す。ここで、式(9)に示したゲートサイズdは事前に与える定数であり、例えば、自由度4のχ二乗分布より決定する。式(8)のzki,jが4次元のベクトルであるので、自由度を4としている。
【0030】
【0031】
次に、画像座標変換部103が、現フレーム距離画像を用いて、ゲート内画素の3次元座標を算出する。3次元座標を求める画素の座標を(i,j)、画素(i,j)の3次元座標を(xki,j,yki,j,zki,j)とすると、図2〜図6に示した関係より、式(1)〜式(7)を用いて、(xki,j,yki,j,zki,j)を算出する。
【0032】
次に、3次元空間相関処理部104が、予測状態ベクトルから抜き出した位置と強度の値からなるベクトルP3Dを生成し、さらに、ゲート内画素(i,j)に対して画像座標変換部103が算出した3次元座標と、ゲート内画素(i,j)の強度値からなるベクトルO3Di,jを生成する。ベクトルP3Dの定義を式(10)に、ベクトルO3Di,jの定義を式(11)に示す。
【0033】
さらに、3次元空間相関処理部104は、正規化相互相関係数を用いて、ベクトルP3DとベクトルO3Di,jの3次元空間相関値NCC3D(i,j)を算出する。NCC3D(i,j)の定義を式(12)に示す。ゲート内画素(i,j)の3次元空間上での位置と追尾点の3次元空間上での予測位置が近く、さらにゲート内画素(i,j)の強度と追尾点の予測強度の差が小さい程、NCC3D(i,j)の値は高くなり、相関が高いことを示す。
【0034】
次に、3次元座標変換部105が、追尾点の3次元予測位置を距離値と画像座標に変換する。以降、追尾点の3次元予測位置から算出する距離値を予測距離値、追尾点の3次元予測位置から算出する画像座標を予測画像座標と記述する。
図2〜図6に示す関係より、3次元座標変換部105における追尾点予測位置
の3次元座標から予測距離および予測画像座標への変換式を式(13)〜式(15)に示す。
【0035】
ここで、3次元座標変換部105は、予測画像座標に代えて、式(8)に示した関数h()を用いて、予測仰角および予測方位角を算出するようにしてもよい。
【0036】
次に、画像平面相関処理部106が、3次元座標変換部105が算出した予測距離および予測画像座標および予測強度からなるベクトルP2Dを生成し、さらに、ゲート内画素(i,j)における距離値および画像座標および強度値からなるベクトルO2Di,jを生成する。ベクトルP2Dの定義を式(16)に、ベクトルO2Di,jの定義を式(17)に示す。
【0037】
ここで、画像平面相関処理部106は、3次元座標変換部105が予測仰角および予測方位角を算出した場合は、ベクトルP2Dを構成する要素のうち、予測画像座標に代えて、3次元座標変換部105が算出した予測仰角および予測方位角をベクトルP2Dの構成要素とし、ベクトルO2Di,jを構成する要素のうち、画像座標(i,j)に代えて、式(1)〜式(4)を用いて、画素(i,j)の仰角および方位角をベクトルO2Di,jの構成要素とする。
【0038】
さらに、画像平面相関処理部106は、正規化相互相関係数を用いて、ベクトルP2DとベクトルO2Di,jの画像平面相関値NCC2D(i,j)を算出する。NCC2D(i,j)の定義を式(18)に示す。ゲート内画素(i,j)の画像座標が予測画像座標に近く、且つ、ゲート内画素(i,j)の距離値と予測距離の差が小さくさらにゲート内画素(i,j)の強度と追尾点の予測強度の差が小さい程、NCC2D(i,j)の値は高くなり、相関が高いことを示す。
【0039】
次に、目標画素指標算出部107が、NCC3D(i,j)とNCC2D(i,j)とを組み合わせた目標画素指標TPIk(i,j)を算出する。目標画素指標は各画素が目標画素である確からしさを表す指標であり、全てのゲート内画素に対して算出する。式(19)にゲート内画素(i,j)における目標画素指標TPIk(i,j)の定義を示す。
NCC3D(i,j)の分布は3次元空間上における相関結果であり、目標画素の他に、追尾点の予測高度に近い高度を持つ背景画素の相関値が高くなりやすい傾向にある。一方、NCC2D(i,j)の分布は、画像平面上における相関結果であり、高度の情報は含まれない。このため、目標画素の他に、追尾点の予測画像座標周辺部の背景画素の相関値が高くなりやすい傾向にある。
そこで、目標画素指標算出部107は、相関値が高くなる背景画素の傾向が異なるNCC3D(i,j)とNCC2D(i,j)を組み合わせることで背景画素の目標画素指標値を低減し、誤抽出を抑制している。
【0040】
次に、目標画素抽出部108が、目標画素指標の分布に基づいた閾値処理により目標画素を抽出する。目標画素の抽出に用いる閾値の算出式を式(20)に、目標画素判定条件を式(21)に示す。式(21)では、目標画素指標が閾値を超えたゲート内画素を目標画素と判定し、2次元配列TgtPixkの当該画素位置に1を立て、目標画素でないと判定されれば当該画素位置に0を立てる。以降、2次元配列TgtPixkを目標画素格納配列と記述する。
【0041】
次に、目標領域抽出部109が、目標画素格納配列における目標画素(すなわち値が1の画素)の分布状況を基に領域分割を行い、1フレーム前に抽出した目標領域に大きさが最も近い領域を現フレームの目標領域とする。なお、目標画素格納配列における目標画素には、真の目標画素に加え、誤抽出された背景画素が含まれる場合もある。以下に目標領域抽出部109の動作を示す。
【0042】
まず、目標画素格納配列の水平方向の周辺分布を求める。式(22)に列座標jの周辺分布の定義を示す。
【0043】
次に、水平方向の周辺分布に対して閾値処理を行い、目標画素が存在する領域の左右両端を検出する。例えば、周辺画素分布MDWk(j1−1)が閾値以下であり、MDWk(j1)が閾値を超える場合、列座標j1を目標画素が存在する領域の左端とする。また、MDWk(j2)が閾値を超え、MDWk(j2+1)が閾値以下の場合、列座標j2を目標画素が存在する領域の右端とする。この時、閾値処理に用いる閾値は事前に設定してもよいし、求めた周辺分布より算出してもよい。なお、目標画素抽出部108の処理において背景画素が誤抽出された場合は、複数組の左右両端が抽出される場合もある。
【0044】
次に、目標画素格納配列を、目標画素領域両端で挟まれる領域に分割し、分割領域毎に垂直方向の周辺分布を求める。式(23)に、n番目の分割領域における垂直方向の周辺分布の定義を示す。
【0045】
次に、分割領域毎に、垂直方向の周辺分布に対して、水平方向の周辺分布における処理と同様の閾値処理を行い、目標画素が存在する領域の上下端を求める。この時、閾値処理に用いる閾値は事前に設定してもよいし、求めた周辺分布より算出してもよい。
次に、抽出した各分割領域の水平・垂直方向の大きさと、1フレーム前に抽出した目標領域の水平・垂直方向の大きさを比較し、1フレーム前に抽出した目標領域の大きさに最も近い分割領域を現フレームの目標領域とする。
次に、追尾点決定部110が、目標領域抽出部109が抽出した目標領域の中心画像座標を追尾点とし、追尾処理部203に出力する。
【0046】
次に、追尾処理部203が、追尾点の画像座標を、式(3)および式(4)を用いて方位角および仰角に変換し、入力画像から取得する追尾点の距離値および強度値と合わせて観測ベクトルを生成する。観測ベクトルは{追尾点の距離,追尾点の仰角,追尾点の方位角,追尾点の強度}を要素とする。
さらに、追尾処理部203は、観測ベクトルと、1フレーム前に追尾処理部203が算出した予測状態ベクトルを用いて、カルマンフィルタによる平滑処理を実行し、平滑状態ベクトルを算出する。平滑状態ベクトルは、{追尾点のX座標平滑値,追尾点のY座標平滑値,追尾点のZ座標平滑値,追尾点のX軸方向速度平滑値,追尾点のY軸方向速度平滑値,追尾点のZ軸方向速度平滑値,追尾点の強度平滑値}を要素とする。
【0047】
さらに、追尾処理部203は、平滑状態ベクトルを用いて、カルマンフィルタ予測処理を実行し、追尾点の予測状態ベクトルを算出する。予測状態ベクトルは、{追尾点の次フレームにおけるX座標予測値,追尾点の次フレームにおけるY座標予測値,追尾点の次フレームにおけるZ座標予測値,追尾点の次フレームにおけるX軸方向速度予測値,追尾点の次フレームにおけるY軸方向速度予測値,追尾点の次フレームにおけるZ軸方向速度予測値,追尾点の次フレームにおける強度予測値}を要素とする。
【0048】
以上のように、実施の形態1の追尾装置によれば、目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、目標抽出装置は、追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、目標領域に基づいて追尾点を算出して追尾点を追尾フィルタ装置に出力し、追尾フィルタ装置は、目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って追尾予測値を出力するようにしたので、テンプレートマッチングと比べて目標領域の抽出精度を向上させることができると共に、抽出処理負荷の低減を図ることができる。
【0049】
また、実施の形態1の追尾装置によれば、目標抽出装置は、初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、追尾フィルタ装置が算出した追尾予測値と入力画像との差を表す残差2次形式を算出し、残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置および予測強度を要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標および強度を要素とするベクトルを用いて、追尾空間である3次元空間での相関処理を行う3次元空間相関処理部と、3次元座標変換部が算出した追尾点の予測画像座標および予測距離と予測強度を要素とするベクトルと、入力画像各画素の画像座標および距離および強度を要素とするベクトルを用いて、画像平面上の相関処理を行う画像平面相関処理部と、3次元空間相関処理部が算出した相関値と、画像平面相関処理部が算出した相関値を組み合わせて、入力画像各画素が目標画素である確からしさを表す目標画素指標を算出する目標画素指標算出部と、目標画素指標に対して閾値処理を行い、入力画像中の目標画素を抽出する目標画素抽出部と、目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、目標領域抽出部が抽出した目標領域より追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、追尾フィルタ装置は、初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、第2フレーム画像入力時に、テンプレートを用いて第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、テンプレートマッチング部が決定した追尾点または追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたので次のような効果がある。
【0050】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と強度値による相関と、観測平面である画像平面上の位置と距離値と強度値による相関の、次元の異なる2種類の相関処理を組み合わせることにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0051】
実施の形態2.
図7は、この発明の実施の形態2による追尾装置の構成を示すブロック構成図である。図7に示す追尾装置において、実施の形態1と異なるのは目標抽出装置300における相関処理部111の構成である。即ち、実施の形態2の目標抽出装置300は、初期目標領域取得部101、ゲート処理部102、画像座標変換部103、3次元座標変換部105、目標画素抽出部108、目標領域抽出部109、追尾点決定部110、相関処理部111を備えている。以下、相関処理部111以外の構成については実施の形態1と同様であるため、これらの説明は省略し、相関処理部111についてのみ説明する。
【0052】
相関処理部111は、追尾処理部203が算出した予測状態ベクトルから得られる、予測位置の3次元座標および予測強度と、3次元座標変換部105が算出した予測距離および予測画像座標を要素とするベクトルPAを生成する。PAの定義を式(24)に示す。
さらに相関処理部111は、ゲート処理部102が抽出したゲート内画素に対して、ゲート内画素の画像座標を(i,j)とすると、画像座標変換部103が算出した3次元座標と、距離と、画像座標と、強度を要素とするベクトルOAi,jを生成する。式(25)にOAi,jの定義を示す。
【0053】
ここで、相関処理部111は、3次元座標変換部105が予測仰角および予測方位角を算出した場合は、ベクトルPAを構成する要素のうち、予測画像座標に代えて、3次元座標変換部105が算出した予測仰角および予測方位角をベクトルPAの構成要素とし、ベクトルOAi,jを構成する要素のうち、画像座標(i,j)に代えて、式(1)〜式(4)を用いて、画素(i,j)の仰角および方位角をベクトルOAi,jの構成要素とする。
さらに相関処理部111は、ベクトルPAと、ベクトルOAi,jの正規化相互相関係数を算出し、目標画素指標TPIk(i,j)とする。目標画素指標TPIk(i,j)の定義を式(26)に示す。
【0054】
以上のように、本発明の実施の形態2による追尾装置によれば、目標抽出装置は、初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、追尾フィルタ装置が出力する追尾予測値と入力画像との差を表す残差2次形式を算出し、残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、相関処理結果を入力画像各画素が目標画素である確からしさを表す目標画素指標とする相関処理部と、目標画素指標に対して閾値処理を行い、入力画像中の目標画素を抽出する目標画素抽出部と、目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、目標領域抽出部が抽出した目標領域より追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、追尾フィルタ装置は、初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、第2フレーム画像入力時に、テンプレートを用いて第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、テンプレートマッチング部が決定した追尾点または追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたので次のような効果がある。
【0055】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と、画像平面上の位置と、距離値と、強度値の、3次元空間上と観測平面上の異なる次元により得られる値を組み合わせたベクトルの相関を取ることにより、背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0056】
実施の形態3.
図8は、この発明の実施の形態3による追尾装置の構成を示すブロック構成図である。実施の形態3による追尾装置は、目標抽出装置400における目標画素指標算出部107aだけが実施の形態1による追尾装置の目標画素指標算出部107と異なり、他は全て同じであるため、以下、目標画素指標算出部107aについてのみ説明する。
【0057】
目標画素指標算出部107aは、3次元空間相関処理部104が算出した3次元相関値NCC3D(i,j)と、画像平面相関処理部106が算出した画像平面相関値NCC2D(i,j)を統合した統合相関値NCCMLT(i,j)を、式(27)を用いて算出し、さらに、式(28)より目標画素指標TPIk(i,j)を算出する。
式(28)では、画素(i,j)を中心とした(2b−1)×(2b−1)の大きさの領域(以降、画素(i,j)の近傍領域と記述する)内のNCCMLTの平均値でNCCMLT(i,j)を補正し、TPIk(i,j)としている。なお、画素(i,j)の近傍領域は画素(i,j)を含まない。また、bは近傍領域の大きさを与えるパラメータであり、その値は事前に設定されるものとする。
【0058】
目標画素指標算出部107aにより、NCCMLTの値が高い画素が密集している領域と、NCCMLTの値が低い画素が密集している領域とでは、TPIkの差が広がり、NCCMLTの値が高い、すなわち追尾予測値との相関が高い領域が相対的に強調される。
一方、NCCMLTが高い画素が孤立して存在する場合、このような孤立画素は相関値が高い背景画素である可能性が高いと考えられる。このような孤立画素の近傍領域のNCCMLTは低い値を取るので、孤立画素のTPIkの値は低く抑えられる。すなわち、背景画素の誤抽出を抑制することができる。
【0059】
以上のように、本発明の実施の形態3による追尾装置によれば、目標画素指標算出部は、3次元空間相関処理部が算出した相関処理結果と、画像平面相関処理部が算出した相関処理結果を掛け合わせた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、次のような効果がある。
【0060】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、追尾空間である3次元空間上の位置と強度値による相関と、観測平面である画像平面上の位置と距離値と強度値による相関の、次元の異なる2種類の相関処理を組み合わせ、さらに、相関値が高い領域が、相関値が低い領域よりも強調されるように相関値の補正処理を行うことにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0061】
実施の形態4.
図9は、この発明の実施の形態4による追尾装置の構成を示すブロック構成図である。実施の形態4による追尾装置は、目標抽出装置500における相関処理部111aだけが実施の形態2による追尾装置の相関処理部111と異なり、他は全て同じであるので、以下、相関処理部111aについてのみ説明する。
【0062】
相関処理部111aは、実施の形態2による追尾装置の相関処理部111と同様に、式(24)に示すベクトルPA、および、式(25)に示すベクトルOAi,jを生成する。さらに、相関処理部111aは、正規化相互相関係数を用いて、ベクトルPAおよびベクトルOAi,jより相関値NCCA(i,j)を算出する。相関値NCCA(i,j)の算出式を式(29)に示す。
【0063】
さらに、画素(i,j)を中心とした、(2b−1)×(2b−1)の大きさの近傍領域に含まれる画素のNCCAの平均値でNCCA(i,j)を補正し、目標画素指標TPIk(i,j)を算出する。目標画素指標TPIk(i,j)の算出式を式(30)に示す。
【0064】
以上のように、本発明の実施の形態4による追尾装置によれば、相関処理部は、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、得られた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、次のような効果がある。
【0065】
すなわち、追尾フィルタが算出する予測状態ベクトルを利用し、予測状態ベクトルと新規入力画像との間での相関処理結果に基づき目標画素の抽出を行うことにより、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。また、相関処理においては、3次元空間上の位置と、画像平面上の位置と、距離値と、強度値の、追尾空間上と観測平面上の異なる次元により得られる値を組み合わせたベクトルの相関値を算出し、さらに、相関値が高い領域が、相関値が低い領域よりも強調されるように相関値の補正処理を行うことにより背景画素の誤抽出を抑制し、目標領域の抽出精度を向上させる効果がある。さらに、目標領域の抽出精度が向上することにより追尾点が安定し、追尾精度が向上する効果がある。
【0066】
実施の形態5.
図10は、この発明の実施の形態5による追尾装置の構成を示すブロック構成図である。実施の形態5による追尾装置は、目標抽出装置600における相関処理部111b以外の処理は、実施の形態2による追尾装置の目標抽出装置300が備えるものと同じであるので、以下、相関処理部111bの処理についてのみ説明する。
【0067】
相関処理部111bは、実施の形態2による追尾装置の相関処理部111と同様に、正規化相互相関係数の値を目標画素指標とするが、正規化相互相関係数を算出するベクトルPAおよびベクトルOAi,jの要素を、以下の4つとする。
(1)ゲート相関処理部102が算出した残差2次形式値
(2)3次元空間X座標
(3)3次元空間Y座標
(4)3次元空間Z座標
【0068】
すなわち、ベクトルPAは、3次元座標変換部105より算出される追尾予測位置の画像座標における残差2次形式の値と、追尾予測値の3次元X、Y、Z座標を要素とし、ベクトルOAi,jは、画素(i,j)における残差2次形式値と、画像座標変換部103より算出される画素(i,j)と対応する3次元X、Y、Z座標を要素とする。
目標画素指標TPIk(i,j)の定義を式(31)に示す。
【0069】
このように、実施の形態5による追尾装置では、相関処理部111bは、追尾フィルタ装置200の状態量に基づく相関値である残差2次形式値と、予測位置および入力画像各画素の3次元位置を組み合わせたベクトルによる正規化相互相関係数を目標画素指標とすることにより、残差2次形式により高い相関値が得られた目標画素はそのまま高い相関が維持され、残差2次形式の相関が高い背景画素が得られたとしても、予測位置との位置のズレにより目標画素指標は低く抑えられるため、背景画素の誤抽出を低減し、目標画素の抽出率を向上させる効果がある。また、画像中の目標の大きさや向きの変化に対する影響を受けにくく、さらにテンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0070】
なお、上記実施の形態5は、実施の形態2による追尾装置における相関処理部111を相関処理部111bに置き換える場合について示したが、実施の形態4による追尾装置における相関処理部111aを相関処理部111bに置き換えても同様の効果が得られる。ただし、この場合、相関処理部111bは相関処理部111aの機能を全て備えるものとする。
【0071】
以上説明したように、実施の形態5の追尾装置によれば、相関処理部は、追尾点予測位置の画像座標における残差2次形式値と追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、これを目標画素指標とするようにしたので、背景画素の誤抽出を低減し、目標画素の抽出率を向上させることができると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0072】
また、実施の形態5の追尾装置によれば、相関処理部は、追尾点予測位置の画像座標における残差2次形式値と追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、得られた相関値に対して、各画素近傍領域の相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように相関値の補正処理を行い、補正処理の結果を目標画素指標とするようにしたので、背景画素の誤抽出を低減し、目標画素の抽出率を向上させることができると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0073】
実施の形態6.
図11は、この発明の実施の形態6による追尾装置の構成を示すブロック構成図である。
実施の形態6による追尾装置は、目標抽出装置700における追尾点決定部110aと、追尾フィルタ装置800における追尾処理部203a以外は、実施の形態5による追尾装置が備えるものと同じであるので、以下、追尾点決定部110aと追尾処理部203aの処理についてのみ説明する。
【0074】
上述した実施の形態1〜5による追尾装置では、追尾フィルタ装置200への入力である観測ベクトルの要素に加える強度値として追尾点座標における強度値を設定している。目標画素の強度にばらつきがあり、追尾点強度値と他の目標画素の強度に差があると、目標画素の残差2次形式値のばらつきも大きくなる可能性があり、この様な場合は、残差2次形式に対する閾値処理において目標画素の抽出漏れが発生する恐れがある。また、実施の形態5による追尾装置では、残差2次形式値を用いて正規化相互相関係数を求め、目標画素指標としているので、目標画素の残差2次形式値のばらつきが大きいと、相関値の低い目標画素が発生し、目標画素の抽出漏れが起きる可能性がある。
そこで、実施の形態6による追尾装置では、目標画素の残差2次形式値のばらつきを抑えて目標画素の相関を全体的に高く保つための処理を、追尾点決定部110aと追尾処理部203aが備える。
【0075】
追尾点決定部110aにおいて、目標領域抽出部109が抽出した目標領域から追尾点の位置を決定する処理は実施の形態5による追尾装置の追尾点決定部110と同じであるが、追尾点決定部110aは、さらに目標領域抽出部109が抽出した目標領域内の平均強度と、目標領域内の強度の標準偏差を算出し、追尾点座標と、目標領域内の平均強度と、目標領域内の強度の標準偏差を追尾処理部203aに対して出力する。
【0076】
次に、追尾処理部203aは、式(3)および式(4)を用いて、追尾点決定部110aより入力される追尾点座標から仰角および方位角を求め、追尾点座標の距離値と、追尾点の仰角と、追尾点の方位角と、追尾点決定部110aより入力される目標領域内の平均強度から観測ベクトルを生成する。すなわち、観測ベクトルは{追尾点距離,追尾点仰角,追尾点方位角,目標領域平均強度}となる。
【0077】
さらに、追尾処理部203aは、追尾点決定部110aより入力される目標領域内の強度の標準偏差を、強度の観測雑音標準偏差に設定する。ここで、観測雑音標準偏差は追尾フィルタ装置200のパラメータであり、追尾フィルタ装置200の入力である観測ベクトルの各要素値の揺らぎ量を与えるものである。実施の形態1〜5による追尾装置では、観測雑音標準偏差は事前に想定される値(固定値)を追尾フィルタ装置200に設定しているが、実施の形態6による追尾装置では、強度の観測雑音標準偏差に関しては、毎フレーム抽出された目標領域内の強度の標準偏差を設定する。
また、追尾処理部203aの観測ベクトル生成が実行され、強度の観測雑音標準偏差を設定した後は、実施の形態5による追尾装置の追尾処理部203と同じ処理を実行する。
【0078】
なお、上記実施の形態6では、観測ベクトルの要素とする強度値を目標領域の平均値としているが、例えば、中央値を用いても同様の効果が得られる。
【0079】
このように、実施の形態6の追尾装置では、観測ベクトルの要素である強度値に抽出した目標領域の平均強度を設定し、追尾フィルタ装置200のパラメータである強度の観測雑音標準偏差に毎フレーム抽出した目標領域の強度の標準偏差を設定することにより、目標画素の残差2次形式値のばらつきが抑えられ、目標画素の相関値が全体的に高く保たれる効果がある。また、目標画素の相関値が全体的に高くなることにより目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上するという効果がある。さらに、画像中の目標の大きさや向きの変化に対する影響を受けにくく、また、テンプレートを用いることなく目標領域の抽出が行えるので、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果もある。
【0080】
以上説明したように、実施の形態6の追尾装置によれば、追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、目標領域内の平均強度および強度の標準偏差を算出し、追尾処理部は、観測ベクトルの要素の一つである強度として、追尾点決定部が算出した目標領域の平均強度を設定し、さらに、毎フレーム追尾点決定部が算出した目標領域の強度の標準偏差を、強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定するようにしたので、目標画素の相関値が全体的に高く保たれ、目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上すると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0081】
また、実施の形態6の追尾装置によれば、追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、目標領域内の強度の中央値および強度の標準偏差を算出し、追尾処理部は、観測ベクトルの要素の一つである強度として、追尾点決定部が算出した目標領域の強度中央値を設定し、さらに、毎フレーム追尾点決定部が算出した目標領域の強度の標準偏差を、強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定するようにしたので、目標画素の相関値が全体的に高く保たれ、目標領域の抽出精度が向上し、追尾点が安定することで追尾精度が向上すると共に、従来技術であるテンプレートマッチングと比べて処理負荷が低減する効果がある。
【0082】
尚、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0083】
100,300,400,500,600,700 目標抽出装置、101 初期目標領域取得部、102 ゲート処理部、103 画像座標変換部、104 3次元空間相関処理部、105 3次元座標変換部、106 画像平面相関処理部、107,107a 目標画素指標算出部、108 目標画素抽出部、109 目標領域抽出部、110,110a 追尾点決定部、111,111a,111b 相関処理部、200 追尾フィルタ装置、201 テンプレート生成部、202 テンプレートマッチング部、203,203a 追尾処理部。
【特許請求の範囲】
【請求項1】
目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、
前記目標抽出装置は、前記追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、当該目標領域に基づいて追尾点を算出して当該追尾点を前記追尾フィルタ装置に出力し、
前記追尾フィルタ装置は、前記目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って前記追尾予測値を出力することを特徴とする追尾装置。
【請求項2】
目標抽出装置は、
初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、
追尾フィルタ装置が算出した追尾予測値と入力画像との差を表す残差2次形式を算出し、前記残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、
前記入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置および予測強度を要素とするベクトルと、前記画像座標変換部が算出した前記入力画像各画素3次元座標および強度を要素とするベクトルを用いて、追尾空間である3次元空間での相関処理を行う3次元空間相関処理部と、
前記3次元座標変換部が算出した前記追尾点の予測画像座標および予測距離と予測強度を要素とするベクトルと、入力画像各画素の画像座標および距離および強度を要素とするベクトルを用いて、画像平面上の相関処理を行う画像平面相関処理部と、
前記3次元空間相関処理部が算出した相関値と、前記画像平面相関処理部が算出した相関値を組み合わせて、入力画像各画素が目標画素である確からしさを表す目標画素指標を算出する目標画素指標算出部と、
前記目標画素指標に対して閾値処理を行い、前記入力画像中の目標画素を抽出する目標画素抽出部と、
前記目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、
前記目標領域抽出部が抽出した目標領域より前記追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、
追尾フィルタ装置は、
前記初期目標領域取得部が取得した前記初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、
第2フレーム画像入力時に、前記テンプレートを用いて前記第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、
前記テンプレートマッチング部が決定した追尾点または前記追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたことを特徴とする請求項1記載の追尾装置。
【請求項3】
目標抽出装置は、
初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、
追尾フィルタ装置が出力する追尾予測値と入力画像との差を表す残差2次形式を算出し、前記残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、
前記入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、前記3次元座標変換部が算出した前記追尾点の予測画像座標と予測距離とを要素とするベクトルと、前記画像座標変換部が算出した前記入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、相関処理結果を入力画像各画素が目標画素である確からしさを表す目標画素指標とする相関処理部と、
前記目標画素指標に対して閾値処理を行い、前記入力画像中の目標画素を抽出する目標画素抽出部と、
前記目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、
前記目標領域抽出部が抽出した目標領域より前記追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、
追尾フィルタ装置は、
前記初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、
第2フレーム画像入力時に、前記テンプレートを用いて前記第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、
前記テンプレートマッチング部が決定した追尾点または前記追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたことを特徴とする請求項1記載の追尾装置。
【請求項4】
目標画素指標算出部は、3次元空間相関処理部が算出した相関処理結果と、画像平面相関処理部が算出した相関処理結果を掛け合わせた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項2記載の追尾装置。
【請求項5】
相関処理部は、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、得られた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項3記載の追尾装置。
【請求項6】
相関処理部は、追尾点予測位置の画像座標における残差2次形式値と当該追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と当該各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、これを目標画素指標とすることを特徴とする請求項3記載の追尾装置。
【請求項7】
相関処理部は、追尾点予測位置の画像座標における残差2次形式値と当該追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と当該各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、得られた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項5記載の追尾装置。
【請求項8】
追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、前記目標領域内の平均強度および強度の標準偏差を算出し、
追尾処理部は、観測ベクトルの要素の一つである強度として、前記追尾点決定部が算出した前記目標領域の平均強度を設定し、さらに、毎フレーム前記追尾点決定部が算出した前記目標領域の強度の標準偏差を、当該強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定することを特徴とする請求項6または請求項7記載の追尾装置。
【請求項9】
追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、前記目標領域内の強度の中央値および強度の標準偏差を算出し、
追尾処理部は、観測ベクトルの要素の一つである強度として、前記追尾点決定部が算出した前記目標領域の強度中央値を設定し、さらに、毎フレーム前記追尾点決定部が算出した前記目標領域の強度の標準偏差を、当該強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定することを特徴とする請求項6または請求項7記載の追尾装置。
【請求項1】
目標抽出装置と追尾フィルタ装置とを備え、センサにより同時に観測された同一画角の距離画像と強度画像のフレームが連続して入力される追尾装置であって、
前記目標抽出装置は、前記追尾フィルタ装置が算出した追尾予測値と入力画像各画素との間で、追尾空間である3次元空間上での相関処理と、画像平面上での相関処理の、次元の異なる2種類の相関処理を組み合わせて目標画素と目標領域を抽出し、当該目標領域に基づいて追尾点を算出して当該追尾点を前記追尾フィルタ装置に出力し、
前記追尾フィルタ装置は、前記目標抽出装置が出力する追尾点に基づいて、次のフレームにおける3次元空間上での追尾点の位置、速度、強度の予測を行って前記追尾予測値を出力することを特徴とする追尾装置。
【請求項2】
目標抽出装置は、
初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、
追尾フィルタ装置が算出した追尾予測値と入力画像との差を表す残差2次形式を算出し、前記残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、
前記入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置および予測強度を要素とするベクトルと、前記画像座標変換部が算出した前記入力画像各画素3次元座標および強度を要素とするベクトルを用いて、追尾空間である3次元空間での相関処理を行う3次元空間相関処理部と、
前記3次元座標変換部が算出した前記追尾点の予測画像座標および予測距離と予測強度を要素とするベクトルと、入力画像各画素の画像座標および距離および強度を要素とするベクトルを用いて、画像平面上の相関処理を行う画像平面相関処理部と、
前記3次元空間相関処理部が算出した相関値と、前記画像平面相関処理部が算出した相関値を組み合わせて、入力画像各画素が目標画素である確からしさを表す目標画素指標を算出する目標画素指標算出部と、
前記目標画素指標に対して閾値処理を行い、前記入力画像中の目標画素を抽出する目標画素抽出部と、
前記目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、
前記目標領域抽出部が抽出した目標領域より前記追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、
追尾フィルタ装置は、
前記初期目標領域取得部が取得した前記初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、
第2フレーム画像入力時に、前記テンプレートを用いて前記第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、
前記テンプレートマッチング部が決定した追尾点または前記追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたことを特徴とする請求項1記載の追尾装置。
【請求項3】
目標抽出装置は、
初期入力画像中から抽出された初期目標領域を取得する初期目標領域取得部と、
追尾フィルタ装置が出力する追尾予測値と入力画像との差を表す残差2次形式を算出し、前記残差2次形式を用いて相関処理の対象となる画素を抽出するゲート処理部と、
前記入力画像の各画素距離値および画像座標から各画素の3次元座標を算出する画像座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置を、予測画像座標とセンサからの予測距離値に変換する3次元座標変換部と、
前記追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、前記3次元座標変換部が算出した前記追尾点の予測画像座標と予測距離とを要素とするベクトルと、前記画像座標変換部が算出した前記入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、相関処理結果を入力画像各画素が目標画素である確からしさを表す目標画素指標とする相関処理部と、
前記目標画素指標に対して閾値処理を行い、前記入力画像中の目標画素を抽出する目標画素抽出部と、
前記目標画素抽出部が抽出した目標画素の分布状況から目標領域を抽出する目標領域抽出部と、
前記目標領域抽出部が抽出した目標領域より前記追尾フィルタ装置の入力となる追尾点を決定する追尾点決定部とを備え、
追尾フィルタ装置は、
前記初期目標領域取得部が取得した初期目標領域の情報と第1フレームの入力画像より、追尾目標のテンプレートを生成するテンプレート生成部と、
第2フレーム画像入力時に、前記テンプレートを用いて前記第2フレーム入力画像中の追尾点を決定するテンプレートマッチング部と、
前記テンプレートマッチング部が決定した追尾点または前記追尾点決定部が決定した追尾点を入力として、3次元空間上で次フレームにおける追尾点の位置、速度、強度を予測する追尾処理部とを備えたことを特徴とする請求項1記載の追尾装置。
【請求項4】
目標画素指標算出部は、3次元空間相関処理部が算出した相関処理結果と、画像平面相関処理部が算出した相関処理結果を掛け合わせた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項2記載の追尾装置。
【請求項5】
相関処理部は、追尾予測値に含まれる追尾点の3次元予測位置と予測強度、および、3次元座標変換部が算出した追尾点の予測画像座標と予測距離とを要素とするベクトルと、画像座標変換部が算出した入力画像各画素3次元座標と、入力画像各画素の画像座標と距離と強度を要素とするベクトルを用いて相関処理を行い、得られた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項3記載の追尾装置。
【請求項6】
相関処理部は、追尾点予測位置の画像座標における残差2次形式値と当該追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と当該各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、これを目標画素指標とすることを特徴とする請求項3記載の追尾装置。
【請求項7】
相関処理部は、追尾点予測位置の画像座標における残差2次形式値と当該追尾点予測位置の3次元座標とを合わせた4つの要素からなるベクトルと、入力画像各画素座標における残差2次形式値と当該各画素座標から算出する3次元座標とを合わせた4つの要素からなるベクトルとの間の相関値を算出し、得られた相関値に対して、各画素近傍領域の前記相関値の平均値を用いて、追尾予測値との相関値の高い領域が相関値の低い領域よりも強調されるように前記相関値の補正処理を行い、当該補正処理の結果を目標画素指標とすることを特徴とする請求項5記載の追尾装置。
【請求項8】
追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、前記目標領域内の平均強度および強度の標準偏差を算出し、
追尾処理部は、観測ベクトルの要素の一つである強度として、前記追尾点決定部が算出した前記目標領域の平均強度を設定し、さらに、毎フレーム前記追尾点決定部が算出した前記目標領域の強度の標準偏差を、当該強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定することを特徴とする請求項6または請求項7記載の追尾装置。
【請求項9】
追尾点決定部は、目標領域抽出部が抽出した目標領域より追尾点を決定すると共に、前記目標領域内の強度の中央値および強度の標準偏差を算出し、
追尾処理部は、観測ベクトルの要素の一つである強度として、前記追尾点決定部が算出した前記目標領域の強度中央値を設定し、さらに、毎フレーム前記追尾点決定部が算出した前記目標領域の強度の標準偏差を、当該強度の揺らぎ量としてのパラメータである強度の観測雑音標準偏差として設定することを特徴とする請求項6または請求項7記載の追尾装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−215549(P2012−215549A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−268224(P2011−268224)
【出願日】平成23年12月7日(2011.12.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年12月7日(2011.12.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]