
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行目標を維持するように自車を追従走行制御する追従走行制御装置に関し、詳しくは、追従走行制御の減速、加速の動作タイミングの改善に関する。
【背景技術】
【0002】
従来、この種の追従走行制御装置は、走行目標(先行車に対する目標車間距離、先行車か存在しない場合の目標車速)を維持するように追従走行制御で自車のスロットルやブレーキを制御し、先行車との間に適切な車間距離を確保する。
【0003】
この種の追従走行制御装置においては、とくにつぎに説明するような状況下でのブレーキの作動タイミング(減速制御タイミング)が、運転者に違和感を感じさせ易い。
【0004】
運転者に違和感を感じさせ易い状況下とは、(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときなどである。ここで、上記接近とは、目標車間距離を割り込む程度の接近である。
【0005】
上記(1)〜(3)の走行状況下でのブレーキの適切な作動タイミングは、自車と先行車との車間距離や、先行車の自車に対する相対速度等によって異なるが、運転者の感覚に対してブレーキの作動タイミングが早ければ、運転者に「頻繁にブレーキが作動して煩わしい」と感じさせる可能性があり、運転者の感覚に対してブレーキの作動タイミングが遅ければ、運転者に「煩雑なブレーキ作動はないがひやりとする」と感じさせる可能性がある。しかも、頻繁にブレーキが作動すると、交通の流れの妨げや渋滞の原因等になる可能性がある。
【0006】
また、追従走行制御中に先行車や自車のレーンチェンジ等によって先行車が検出されなくなったりしたときにも、その都度、目標速度に達するように加速すると、運転者の感覚に対して、「頻繁に加速して煩わしい」と感じさせる可能性がある。
【0007】
そして、前記のアクセルオーバライド後、設定された所定時間、追従走行制御でのブレーキの作動による減速を抑制して交通の流れを妨げないようにすることが提案されている(例えば、特許文献1参照)。
【0008】
また、追従走行制御中に先行車が検出できなくなったときは、その後、設定された一定時間待って加速することが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2002−87110号公報
【特許文献2】特開平9−263160号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
前記特許文献1に記載の追従走行制御装置の場合、ブレーキを作動して減速する際に、減速度は小さくなるが直ちにブレーキが作動してブレーキランプが点灯し、それに応動して後続車が次々とブレーキをかけるので、交通の流れの妨げや渋滞の原因等になる可能性を回避できない。
【0011】
前記特許文献2に記載の追従走行制御装置の場合、設定された上記一定時間が長いと、その間に新たな先行車との車間距離が開き、その後急加速で追従状態に戻るようになるので交通の流れを乱す可能性があり、上記一定時間が短いと、頻繁な加減速によって運転者にギクシャク感を与える可能性がある。
【0012】
本発明は、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の減速や加速が行なえるようにすることを目的とする。
【課題を解決するための手段】
【0013】
上記した目的を達成するために、本発明の追従走行制御装置は、走行目標を維持するように自車を追従走行制御により加減速する追従走行装置であって、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止する制御禁止手段と、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開する禁止解除手段とを備えたことを特徴としている(請求項1)。
【0014】
また、本発明の追従走行制御装置においては、前記走行状況の変化はブレーキが作動する減速状況への変化であり、前記制御禁止手段は、前記走行状況の変化によって前記実車間距離が前記目標車間距離に対して小さくなるときに追従走行制御を一旦禁止し、前記禁止時間は、前記実車間距離が長くなる程長くなることが好ましい(請求項2)。
【発明の効果】
【0015】
請求項1に係る本発明の追従走行制御装置の場合、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれると、制御禁止手段により、追従走行制御を一旦禁止して直ちに加減速を開始しないようにするとともに、禁止解除手段により、走行状況に応じて変化する禁止時間が経過してから追従走行制御を再開する。そのため、例えば、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときなどに、直ちにブレーキを作動して減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて減速が開始され、運転者に違和感を与えることがなく、その間の走行状況の変化によってブレーキ操作の回数も減少する。しかも、減速度を小さくするのではなく、走行状況に応じて変化する禁止時間を設定し、その時間には追従走行制御を行なわないようにしてブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止することができ、交通の流れの妨げや渋滞の原因等になる可能性を回避しつつ適切なタイミングで追従走行制御の減速や加速が行なえる。
【0016】
さらに、前記禁止時間が走行状況に応じて長短変化し、追従走行制御中に先行車や自車のレーンチェンジ等によって先行車が検出できなくなったときには、前記禁止時間が長くなって新たな先行車との車間距離が大きく開いたりせず、急加速を行なわなくて済み、交通の流れを乱すことがない。また、頻繁な加減速によって運転者にギクシャク感を与えることもない。
【0017】
したがって、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の減速や加速が行なえる。
【0018】
請求項2に係る本発明の追従走行制御装置の場合、ブレーキが作動する減速の走行状況への変化が発生し、実車間距離が目標車間距離に対して小さくなるときに、追従走行制御を一旦禁止し、その禁止を解除するタイミングを設定するための前記禁止時間を、実車間距離が目標車間距離に対して長くなって安全になる程長くし、ブレーキが作動する減速制御のより具体的な構成を提供できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態の追従走行制御装置のブロック図である。
【図2】図1の一部の詳細なブロック図である。
【図3】図2の一部の詳細なブロック図である。
【図4】図2の動作説明用のフローチャートである。
【図5】本発明の他の実施形態の追従走行制御装置の一部のブロック図である。
【図6】図5の一部の詳細なブロック図である。
【図7】図5の動作説明用のフローチャートである。
【発明を実施するための形態】
【0020】
つぎに、本発明をより詳細に説明するため、実施形態について、図1〜図7を参照して詳述する。
【0021】
(一実施形態)
まず、ブレーキが作動する追従走行制御の減速に適用した一実施形態について、図1〜図4を参照して説明する。
【0022】
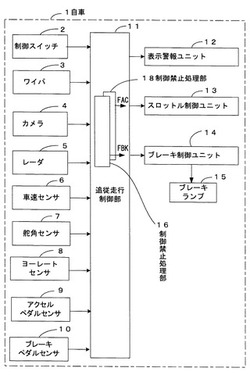
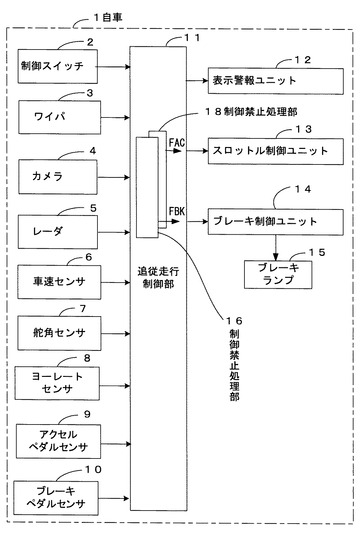
図1は自車1に搭載された本実施形態の追従走行制御装置を示し、図1において、2は制御モードの切り替え等を操作設定する制御スイッチ、3はワイパー動作に連動するワイパースイッチ、4は画像センサとしてのカメラであり、モノクロまたはカラーのCCD単眼カメラ、ステレオカメラ等からなり、車室内に自車前方を撮影するように設けられている。
【0023】
5は車両1のフロントバンパー部等に設けられた測距レーダであり、レーザレーダ、ミリ波レーダ等のスキャン式の種々のレーダからなり、自車前方を左右方向(横幅方向)にスキャンしながら探査する。6は自車1の車速センサ(車輪速センサ)であり、時々刻々の自車速を検出する。7、8は舵角センサ、ヨーレートセンサであり、自車挙動の舵角、ヨーレートを検出する。
【0024】
9はアクセルペダルの踏み込みを検出するアクセルペダルセンサである。10はブレーキペダルの踏みこみを検出するブレーキペダルセンサである。
【0025】
11はマイクロコンピュータ等からなるECU構成の追従走行制御部であり、予め設定された追従走行制御のプログラムを実行し、後述する追従走行制御の加減速指令、制動指令等を出力し、衝突の注意報や回避等の表示・警報を制御する。
【0026】
12、13、14は追従走行制御部11の指令等にしたがって動作する表示警報ユニット、スロットル制御ユニット、ブレーキ制御ユニットそれぞれであり、表示警報ユニット12は例えば表示インストルメントパネルの適当な位置に設けられて衝突の注意報や回避等を表示・警報する。スロットル制御ユニット13は追従走行制御の加速指令にしたがって車両1のスロットル開度を操作し、車両1の加速を制御する。ブレーキ制御ユニット14は追従走行制御の減速指令にしたがって車両1のブレーキ機構を制御し、車両1のブレーキを作動する。15はブレーキ制御ユニット14のブレーキの作動中に点灯するブレーキランプである。
【0027】
追従走行制御部11は、追従走行制御のプログラムを実行することにより、周知の追従走行制御と同様、概略、つぎに説明するように動作する。
【0028】
制御スイッチ2により追従走行のモードが選択されることを条件に、追従走行制御部11が追従走行制御のプログラムを実行し、レーダ5の探査結果に基づく自車1と先行車との車間距離の情報、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で先行車を検出し、自車1と先行車との計測した車間距離(実車間距離)の情報、車速センサ6から得られる自車1の車速(自車速)の情報および、舵角センサ7、ヨーレートセンサ8の自車1の挙動の情報、アクセルペダルセンサ9のアクセルペダルの踏み込みの情報、ブレーキペダルセンサ10のブレーキペダルの踏み込みの情報等をくり返し収集する。
【0029】
さらに、時々刻々の実車間距離、自車速等に基づき、追従走行制御部11は、先行車があるときは、走行目標として、時々刻々の追従走行制御の目標車間距離を設定し、実車間距離が目標車間距離になるように、制御ユニット11、12に加速指令、減速指令それぞれを与えて自車1を加減速制御する。なお、先行車が存在しない状態では、走行目標が設定された目標車速になり、この目標車速になるように自車1を加減速する。
【0030】
目標車間距離は、運転者による制御スイッチ2の選択操作等によって設定され、例えば選択された車間時間をそのときの先行車の相対速度に基づいて換算した距離である。
【0031】
追従走行制御部11は、本実施形態の場合、前記追従走行の減速制御を運転者に違和感を与えることなく、かつ、交通の流れの妨げや渋滞の原因等になる可能性を回避する適切なタイミングでブレーキを作動するため、本発明の制御禁止手段、禁止解除手段を備える。
【0032】
制御禁止手段は、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対して短い方にずれたときに追従走行制御を一旦禁止する。禁止解除手段は、走行状況に応じて変化する禁止時間を算出し、算出した禁止時間が経過した後に追従走行制御の前記禁止を解除して追従走行制御を再開する。
【0033】
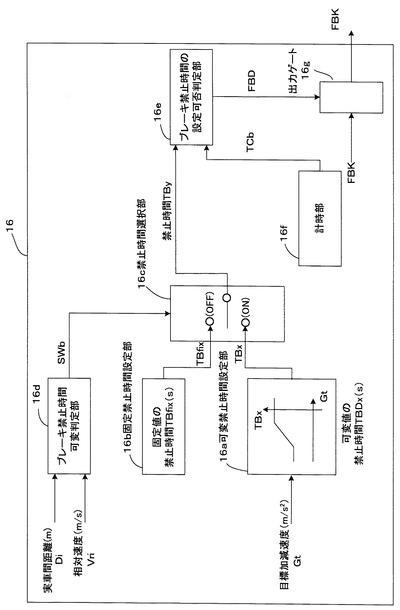
図2は、減速制御時の前記制御禁止手段、前記禁止解除手段をソフトウェアで形成することによって追従走行制御部11が備える制御禁止処理部16の具体的な減速時のブレーキ一時禁止の構成例を示し、例えば、実車間距離Diの時間変化から時々刻々の先行車の相対速度Vri(m/s)を検出し、実車間距離Diと目標車間距離との偏差(ずれ)および相対速度Vri(m/s)から時々刻々の自車1の追従走行制御の目標加減速度Gt(m/s2)を求める。本実施形態の場合、直接の走行目標は目標加減速度Gtである。
【0034】
そして、可変禁止時間設定部16aにより、走行状況に応じて変化する減速制御の禁止時間TBx(s)を、例えば予め設定された目標加減速度Gtと禁止時間TBxのマップから算出する。なお、走行状況の指標は、最も広義には実車間距離Diであるが、その時間変化である相対速度Vriであってもよく、好ましくは目標加減速度Gtである。また、禁止時間TBxの一例は数秒〜数百ミリ秒である。さらに、目標加減速度Gtが負になるブレーキの作動時、目標加減速度Gtが負の大きな値になり、実車間距離Diが短くなって衝突の可能性が高くなる程、安全性を確保するために禁止時間TBxは短くなり、逆に、目標加減速度Gtの絶対値が小さくなり、実車間距離Diが長くなって安全になる程、禁止時間TBxは長くなる。
【0035】
一方、固定禁止時間設定部16bには、減速制御の禁止時間として、減速制御の所定の禁止時間TBfix(s)、具体的には禁止時間TBxの最も長い時間が設定される。
【0036】
そして、減速制御の禁止時間TBx、TBfixが禁止時間選択部16cに入力され、禁止時間選択部16cはブレーキ禁止時間可変判定部16dの判定結果の選択出力SWにより、禁止時間TBx、TBfixのいずれかを実際の減速制御の禁止時間TByとして択一的に選択する。
【0037】
ブレーキ禁止時間可変判定部16dは、禁止時間TByを可変するか否かを判定する。そして、減速制御時、少なくとも実車間距離Diが長く、さらに実際の相対速度Vriも大きく、先行車が離れる傾向を示して安全と判断した場合は、禁止時間TByとして十分長い所定の禁止時間TBfixを選択し、それ以外の場合は、禁止時間TByとして禁止時間TBfixより短くなる可変禁止時間設定部16aの可変値の禁止時間TBxを選択する。
【0038】
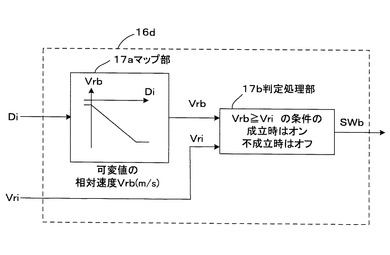
図3はブレーキ禁止時間可変判定部16dの詳細な構成例を示し、マップ部17aにより、実車間距離Diに対して、禁止時間TByを所定の禁止時間TBfixに設定しても安全であるしきい値の相対速度Vrb(m/s)を、予め設定された実車間距離Diと相対速度Vrbのマップから求める。さらに、判定処理部17bにより、しきい値の相対速度Vrbと、時々刻々の実車間距離Diの変化から実測される実際の相対速度Vriとを比較し、Vrb≧Vriの条件(実際の相対速度Vriがしきい値の相対速度Vrbより小さく自車1が先行車に接近している条件)が成立して十分に安全とはいえないと判定したときは、判定処理部17bから禁止時間選択部16cに与える選択制御出力(または選択フラグ)SWbを、可変禁止時間設定部16aの禁止時間TBxを選択するオン(セット)出力とし、前記条件が不成立で十分に安全であると判定したときは、固定禁止時間設定部16bの禁止時間TBfixを選択するオフ(リセット)出力とする。
【0039】
そのため、禁止時間選択部16cは、禁止時間TBfixに設定して安全なときには禁止時間TByとして禁止時間TBfixを選択し、それ以外の時には禁止時間TByとして走行状況に応じて禁止時間TBfixより短くなる可変禁止時間設定部16aの禁止時間TBxを選択する。
【0040】
さらに、禁止時間選択部16cの禁止時間TByは、ブレーキ禁止時間の設定可否判定部16eに送られ、設定可否判定部16eは、計時部16fの計時結果に基づき、禁止時間TByを設定するか否かを判定する。
【0041】
そして、本実施形態の場合、禁止時間TByを、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときのいずれかの追従走行制御の走行状況において設定するものとする。これらの走行状況においては、運転者は少し様子を見てからブレーキをかけるのが普通だからである。
【0042】
そこで、計時部16fにより、(1)レーダ5の探査結果に基づく自車1と先行車との車間距離の情報、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で新たな先行車(新規車両)を特定して検出したときには、新規車両の検出後から現在までの時間を計時する。(2)先行車が接近した状態で追従走行制御装置をオンしてから現在までの時間を計時する。(3)アクセルペダルセンサ9の出力からアクセルオーバライドの発生、解除を検知し、アクセルオーバライドが解除されてから現在までの時間を計時する。
【0043】
そして、設定可否判定部16eは、禁止時間選択部16cの禁止時間TByと計時部16fの計時時間TCbとを比較し、TBy≧TCbが成立する禁止時間TByには、ブレーキ作動禁止フラグFBDをオンする。
【0044】
さらに、ブレーキ作動禁止フラグFBDによりブレーキ作動指令フラグFBKの出力ゲート16gを制御し、追従走行制御部11の周知の追従走行制御により,少なくとも前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するとき、それぞれに形成されるブレーキ作動指令フラグFBKを、ブレーキ作動禁止フラグFBDがオンしている禁止時間TByには出力ゲート16gから図1のブレーキ制御ユニット14に出力しないようにして減速制御を禁止する。
【0045】
すなわち、これらの減速制御が行なわれる走行状況にあっては、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して短い方にずれることにより、ブレーキ作動指令フラグFBKは直ちに形成される。このブレーキ作動指令フラグFBKをブレーキ制御ユニット14に与えて減速制御を実施し、ブレーキを直ちに作動すると、運転者に違和感を与える。そこで、これらの減速制御が行なわれる走行状況にあっては、実車間距離Diが目標車間距離に対して短い方にずれたときに制御禁止処理部16が形成する制御禁止手段により、ブレーキ作動禁止フラグFBDをオンして出力ゲート16gを閉じ、出力ゲート16gからブレーキ制御ユニット14にブレーキ作動指令フラグFBKを出力しないようにしてブレーキの作動を一旦禁止し、禁止時間TByが経過した後、制御禁止処理部16が形成する禁止解除手段によりブレーキ作動禁止フラグFBDをオフして出力ゲート16gを開き、出力ゲート16gからブレーキ制御ユニット14にブレーキ作動指令フラグFBKを出力してブレーキを作動する。なお、そのときに走行状況が変わってブレーキ作動指令フラグFBKがオフしていれば、ブレーキは作動しない。また、ブレーキ作動指令フラグFBKにしたがってブレーキ制御ユニット14がブレーキを作動する間は、ブレーキ制御ユニット14によってブレーキランプ15が点灯する。
【0046】
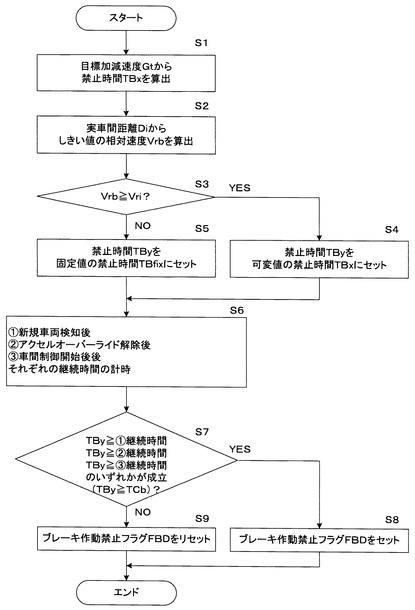
図4は追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して短いほうにずれたときに制御禁止処理部16により行なわれる上記の減速制御の処理手順を示し、実車間距離Diが目標車間距離に対して短いほうにずれると、目標減加速度Gtから減速制御の禁止時間TBxを算出し(ステップS1)、実車間距離Diからしきい値の相対速度Vrbを算出する(ステップS2)。
【0047】
つぎに、Vrb≧Vriの条件が成立すれば、ステップS3をYESで通過し、実際の減速制御の禁止時間TByとして禁止時間TBxを選択し(ステップS4)、Vrb≧Vriの条件が成立しなければ、ステップS3をNOで通過し、実際の減速制御の禁止時間TByとして禁止時間TBfixを選択する(ステップS5)。
【0048】
さらに、ステップS4またはステップS5からステップS6に移行して計時部16fの計時を実行し、TBy≧TCbが成立する禁止時間TBy内は、ステップS7をYESで通過してブレーキ作動禁止フラグFBDをオンにセットし(ステップS8)、ブレーキ作動指令フラグFBKによる減速制御を禁止する。TBy≧TCbが成立しなくなって禁止時間TByが終了すれば、ステップS7をNOで通過してブレーキ作動禁止フラグFBDをオフにリセットし(ステップS9)、ブレーキ作動指令フラグFBKによる減速制御の禁止を解除する。
【0049】
このようにすることによって、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速してアクセルオーバライドが実施され、自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するとき、それぞれに直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて減速が開始され、運転者に違和感を与えることがなく、その間の走行状況の変化によってブレーキ操作の回数も減少する。しかも、減速度を小さくするのではなく、走行状況に応じて変化する禁止時間TByを設定し、その時間には追従走行制御を行なわないようにしてブレーキランプ15を点灯しないため、自車1のブレーキランプ15の点灯に応動して後続車が次々とブレーキをかける事態の発生を防止し、交通の流れの妨げや渋滞の原因等になる可能性を回避しつつ運転者に違和感を与えない適切なタイミングでブレーキを作動できる。
【0050】
したがって、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速が行なえる。
【0051】
また、本実施形態の場合、ブレーキが作動する減速の走行状況への変化が発生し、実車間距離Diが目標車間距離に対して小さくなるときに、追従走行制御によるブレーキの作動を一旦禁止し、その禁止を解除するタイミングを設定するための禁止時間TByを、実車間距離Diが長くなって目標加減速度Gtの絶対値が小さくなり、ブレーキをかけても安全になる程長くすることにより、減速制御の具体的な構成を提供できる。
【0052】
なお、ブレーキの作動が必要な走行状況を「運転者の操作直後」と「走行環境が変化した直後」に分類すると、「運転者の操作直後」としては、先行車両に接近した状態でのオーバーライド解除直後、先行車両に接近した状態での追従走行制御の開始直後、運転者目標車間距離の長から短への変更直後等が考えられる。また、「走行環境が変化した直後」としては、先行車両と自車両との間への新たな先行車の割り込みが発生したとき、カーブを走行している隣車線の車両を自車線の先行車と誤認識したときなどが考えられる。そして、これらの走行状況下において、本実施形態の減速制御を行なうことにより、運転者に違和感を与えない適切なタイミングで減速制御を行なってブレーキを作動できるのは勿論である。
【0053】
また、前記特許文献1に記載の制御は相対速度と車間距離偏差のゲインを低減するものであるため、低速の追従走行制御時(例えば、車速40km/h未満)であっても、中高速の追従走行制御時(例えば、車速40km/h以上)であっても、同じ減速度のブレーキが作動する。そして、例えば、自車1と先行車との車間距離偏差が5mであっても、80km/hの走行時と20km/hの走行時とでは、ブレーキが作動して交通の流れを阻害する減速の程度が異なることから、前記特許文献1に記載の制御では、低速から中高速までの追従走行の減速を交通の流れを阻害しないように円滑に行なうことはできないが、本実施形態の場合、禁止時間TBxの可変判定を相対速度Vriによって行なうため、同じ車間距離であっても、相対速度Vriによってブレーキの作動を禁止する時間が変化し、低速から中高速までの追従走行の減速を交通の流れを阻害しないように円滑に行なうことができる。
【0054】
(他の実施形態)
つぎに、加速制御に適用した他の実施形態について、図1および図5〜図7を参照して説明する。
【0055】
本実施形態の場合も図1の追従走行制御装置に適用する。追従走行制御部11は追従走行の加速制御を運転者に違和感を与えることなく実行するため、制御禁止処理部16の制御禁止手段、禁止解除手段に、つぎに説明する機能を、単独で、または、前記一実施形態の機能とともに備える。
【0056】
すなわち、制御禁止手段は、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれて加速制御が必要になったときにも追従走行制御を一旦禁止する。禁止解除手段は、走行状況に応じて変化する禁止時間を算出し、算出した禁止時間が経過した後に追従走行制御の前記禁止を解除して追従走行制御を再開する。
【0057】
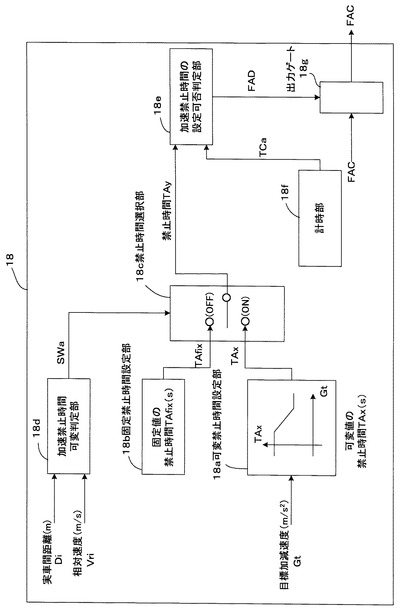
図5は、加速制御時の前記制御禁止手段、前記禁止解除手段をソフトウェアで形成することにより、追従走行制御部11が図1の制御禁止処理部16に代えて、または、制御禁止処理部16ともに備える制御禁止処理部18の具体的な加速時の加速一時禁止の構成例を示し、加速制御の制御禁止処理部18は、減速制御の制御禁止処理部16と同様、例えば、実車間距離Diの時間変化から時々刻々の先行車の相対速度Vri(m/s)を検出し、実車間距離Diと目標車間距離との偏差(ずれ)および相対速度Vri(m/s)から時々刻々の自車1の追従走行制御の目標加減速度Gt(m/s2)を求める。なお、図1には追従走行制御部11が制御禁止処理部16、18を備えた状態を示す。
【0058】
そして、可変禁止時間設定部18aにより、走行状況に応じて変化する加速制御の禁止時間TAx(s)を、例えば予め設定された目標加減速度Gtと禁止時間TAxのマップから算出する。なお、走行状況の指標は、加速制御であっても、最も広義には実車間距離Diであり、その変化である相対速度Vriであってもよく、好ましくは目標加減速度Gtである。また、禁止時間TAxの一例も数秒〜数百ミリ秒であり、目標加減速度Gtが正になる加速制御時、目標加減速度Gtが正の大きな値になり、実車間距離Diが長くなって先行車が離れていくときは、早く加速制御を開始するように禁止時間TAxは短くなり、逆に、目標加減速度Gtが小さくなり、実車間距離Diが短くなる程、禁止時間TAxは長くなって加速制御を開始するまでの走行状況の様子を見るための「間」を長くする。
【0059】
一方、固定禁止時間設定部18bには、加速制御の禁止時間として、標準的な「間」をとる加速制御の所定の禁止時間TAfix(s)、具体的には禁止時間TAxの最も長い時間が設定される。
【0060】
そして、加速制御の禁止時間TAx、TAfixが禁止時間選択部18cに入力され、禁止時間選択部18cは加速禁止時間可変判定部18dの判定結果の選択出力SWaにより、禁止時間TAx、TAfixのいずれかを実際の加速制御の禁止時間TAyとして択一的に選択する。
【0061】
加速禁止時間可変判定部18dは、禁止時間TAyを可変するか否かを判定する。そして、加速制御時、実車間距離Diに比して実際の相対速度Vriが小さく、先行車に略追従している場合は、禁止時間TAyとして所定の禁止時間TAfixを選択し、それ以外の場合は、禁止時間TAyとして禁止時間TAfixより短い可変禁止時間設定部18aの可変値の禁止時間TAxを選択する。
【0062】
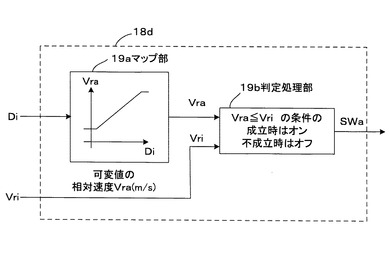
図6は加速禁止時間可変判定部18dの詳細な構成例を示し、マップ部19aにより、実車間距離Diに対して、禁止時間TAyを所定の禁止時間TAfixに設定しても先行車から遅れるおそれがない相対速度Vriを、しきい値の相対速度Vra(m/s)として求める。さらに、判定処理部19bにより、しきい値の相対速度Vraと、時々刻々の相対速度Vriとを比較し、Vra≦Vriの条件が成立したときは、判定処理部17bから禁止時間選択部19cに与える選択出力(または選択フラグ)SWを、可変禁止時間設定部19aの禁止時間TAxを選択するオン(セット)出力とし、前記条件が不成立で十分な「間」が取れると判定したときは、固定禁止時間設定部19bの禁止時間TAfixを選択するオフ(リセット)出力とする。
【0063】
そのため、禁止時間選択部19cは、禁止時間TAfixに設定して問題のないときには禁止時間TAyとして禁止時間TAfixを選択し、それ以外の時には禁止時間TAyとして走行状況に応じて禁止時間TAfixより短くした可変禁止時間設定部16aの禁止時間TAxを選択する。
【0064】
さらに、禁止時間選択部19cの禁止時間TAyは、加速禁止時間の設定可否判定部19eに送られ、設定可否判定部19eは、計時部19fの計時結果に基づき、加速制御の禁止時間TAyを設定するか否かを判定する。
【0065】
そして、本実施形態の場合、禁止時間TAyを、(1)運転者が制御スイッチ2を操作して目標車間距離を短から長に変更したとき、(2)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速することが止められて、アクセルオーバライドが解除された直後、(3)追従走行制御を開始した直後、(4)先行車を見失ったときのいずれかの走行状況において設定するものとする。
【0066】
これらの走行状況においては、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれることにより、直ちに加速したり、長い「間」をとって加速を開始すると、先行車との関係において、ギクシャクした運転状況になり、運転者に違和感を与える可能性がある。
【0067】
そこで、計時部19fにより、(1)制御スイッチ2の操作による目標車間距離の短から長への変更が発生したとききは、その検出後から現在までの時間を計時する。(2)アクセルペダルセンサ9の出力からアクセルオーバライドの発生、解除を検知したときには、アクセルオーバライドが解除されてから現在までの時間を計時する。(3)エンジンスタートや運転者のモード切替等によって追従走行制御を開始したときは、その直後から現在までの時間を計時する。(4)レーダ5の探査結果、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で捕捉していた先行車を見失ったときは、その直後から現在までの時間を計時する。
【0068】
そして、設定可否判定部19eは、禁止時間選択部19cの禁止時間TAyと計時部19fの計時時間TCaとを比較し、TAy≧TCaが成立する加速禁止時間Tyには、加速禁止フラグFADをオンする。
【0069】
さらに、加速禁止フラグFADにより加速作動指令フラグFACの出力ゲート19gを制御し、追従走行制御部11の周知の追従走行制御により、少なくとも前記した(1)制御スイッチ2の操作による目標車間距離の短から長への変更が発生して加速するとき、(2)アクセルオーバライドが解除されたが、先行車の加速等によって引き続き加速するとき、(3)追従走行制御を開始して加速するとき、(4)レーンチェンジ等で先行車を見失って設定された定速走行状態まで加速するとき、それぞれに形成される加速指令フラグFACを、加速禁止フラグFADがオンしている禁止時間TAxには出力ゲート19gからスロットル制御ユニット13に出力しないようにして加速制御を禁止する。
【0070】
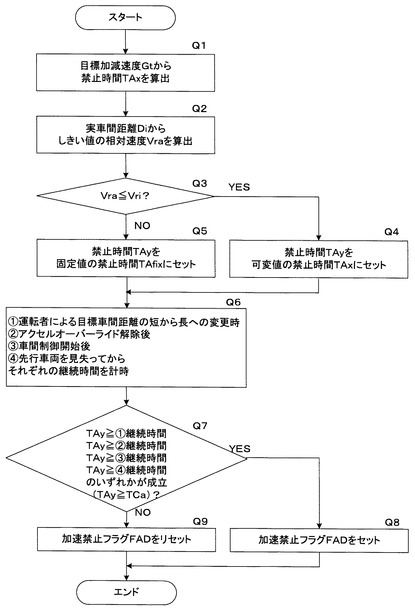
図7は追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれたときに制御禁止処理部16により行なわれる上記の加速制御の処理手順を示し、実車間距離Diが目標車間距離に対して長い方にずれると、目標減加速度Gtから加速制御の禁止時間TAxを算出し(ステップQ1)、実車間距離Diからしきい値の相対速度Vraを算出する(ステップQ2)。
【0071】
つぎに、Vra≦Vriの条件が成立すれば、ステップQ3をYESで通過し、実際の加速禁止時間として禁止時間TAxを選択し(ステップQ4)、Vra≦Vriの条件が成立しなければ、ステップQ3をNOで通過し、実際の加速禁止時間として禁止時間TAfixを選択する(ステップQ5)。
【0072】
さらに、ステップQ4またはステップQ5からステップQ6に移行して計時部19fの計時を実行し、TAy≧TCaが成立する禁止時間TAy内は、ステップQ7をYESで通過して加速禁止フラグFADをオンにセットし(ステップQ8)、加速指令フラグFACによる加速制御を禁止する。TAy≧TCaが成立しなくなって禁止時間TAyが終了すれば、ステップQ7をNOで通過して加速禁止フラグFADをオフにリセットし(ステップQ9)、加速指令フラグFACによる加速制御の禁止を解除する。
【0073】
このようにすることによって、前記した(1)運転者が制御スイッチ2を操作して目標車間距離を短から長に変更したとき、(2)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速することが止められて、アクセルオーバライドが解除された直後、(3)追従走行制御を開始した直後、(4)先行車を見失ったとき、それぞれに直ちに加速するのでなく、運転者のアクセルペダル操作に即するように禁止時間の「間」をおいて加速が開始される。この場合、不必要な加速と減速のくり返し等が抑制されて、運転者に違和感を与えることがなく、交通の流れを阻害することもない。
【0074】
したがって、本実施形態の場合、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の加速が行なえる。
【0075】
なお、加速制御が必要な走行状況を、「運転者の操作直後」と「走行環境が変化した直後」に分類すると、「運転者の操作直後」としては、前記したオーバーライド解除直後、追従走行制御の開始直後、運転者目標車間距離の短から長への変更直後等が考えられる。また、「走行環境が変化した直後」としては、前記した先行車両を見失った直後などが考えられる。そして、これらの走行状況下においては、本実施形態の加速制御を行なうことにより、前記したように運転者に違和感を与えない適切なタイミングで加速が行なえる。
【0076】
つぎに、前記一実施形態の減速制御と前記他の実施形態の加速制御の両方の機能を備え、走行状況に応じて(具体的には、実車間距離Diの目標車間距離に対するずれ方によって)、減速制御と加速制御を選択的に行なうようにすれば、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の加減速が行なえる。
【0077】
そして、本発明は上記した両実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、前記両実施形態の追従走行制御部11が備える制御禁止処理部16、18等の構成や処理手順は、前記両実施形態のものに限るものではない。
【0078】
また、禁止時間TAfix、TBfix等は、適当に設定してよいのは勿論である。
【0079】
そして、本発明は、種々の車両の追従走行制御装置に適用できる。
【符号の説明】
【0080】
1 自車
11 追従走行制御部
16、18 制御禁止処理部
【技術分野】
【0001】
本発明は、走行目標を維持するように自車を追従走行制御する追従走行制御装置に関し、詳しくは、追従走行制御の減速、加速の動作タイミングの改善に関する。
【背景技術】
【0002】
従来、この種の追従走行制御装置は、走行目標(先行車に対する目標車間距離、先行車か存在しない場合の目標車速)を維持するように追従走行制御で自車のスロットルやブレーキを制御し、先行車との間に適切な車間距離を確保する。
【0003】
この種の追従走行制御装置においては、とくにつぎに説明するような状況下でのブレーキの作動タイミング(減速制御タイミング)が、運転者に違和感を感じさせ易い。
【0004】
運転者に違和感を感じさせ易い状況下とは、(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときなどである。ここで、上記接近とは、目標車間距離を割り込む程度の接近である。
【0005】
上記(1)〜(3)の走行状況下でのブレーキの適切な作動タイミングは、自車と先行車との車間距離や、先行車の自車に対する相対速度等によって異なるが、運転者の感覚に対してブレーキの作動タイミングが早ければ、運転者に「頻繁にブレーキが作動して煩わしい」と感じさせる可能性があり、運転者の感覚に対してブレーキの作動タイミングが遅ければ、運転者に「煩雑なブレーキ作動はないがひやりとする」と感じさせる可能性がある。しかも、頻繁にブレーキが作動すると、交通の流れの妨げや渋滞の原因等になる可能性がある。
【0006】
また、追従走行制御中に先行車や自車のレーンチェンジ等によって先行車が検出されなくなったりしたときにも、その都度、目標速度に達するように加速すると、運転者の感覚に対して、「頻繁に加速して煩わしい」と感じさせる可能性がある。
【0007】
そして、前記のアクセルオーバライド後、設定された所定時間、追従走行制御でのブレーキの作動による減速を抑制して交通の流れを妨げないようにすることが提案されている(例えば、特許文献1参照)。
【0008】
また、追従走行制御中に先行車が検出できなくなったときは、その後、設定された一定時間待って加速することが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2002−87110号公報
【特許文献2】特開平9−263160号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
前記特許文献1に記載の追従走行制御装置の場合、ブレーキを作動して減速する際に、減速度は小さくなるが直ちにブレーキが作動してブレーキランプが点灯し、それに応動して後続車が次々とブレーキをかけるので、交通の流れの妨げや渋滞の原因等になる可能性を回避できない。
【0011】
前記特許文献2に記載の追従走行制御装置の場合、設定された上記一定時間が長いと、その間に新たな先行車との車間距離が開き、その後急加速で追従状態に戻るようになるので交通の流れを乱す可能性があり、上記一定時間が短いと、頻繁な加減速によって運転者にギクシャク感を与える可能性がある。
【0012】
本発明は、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の減速や加速が行なえるようにすることを目的とする。
【課題を解決するための手段】
【0013】
上記した目的を達成するために、本発明の追従走行制御装置は、走行目標を維持するように自車を追従走行制御により加減速する追従走行装置であって、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止する制御禁止手段と、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開する禁止解除手段とを備えたことを特徴としている(請求項1)。
【0014】
また、本発明の追従走行制御装置においては、前記走行状況の変化はブレーキが作動する減速状況への変化であり、前記制御禁止手段は、前記走行状況の変化によって前記実車間距離が前記目標車間距離に対して小さくなるときに追従走行制御を一旦禁止し、前記禁止時間は、前記実車間距離が長くなる程長くなることが好ましい(請求項2)。
【発明の効果】
【0015】
請求項1に係る本発明の追従走行制御装置の場合、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれると、制御禁止手段により、追従走行制御を一旦禁止して直ちに加減速を開始しないようにするとともに、禁止解除手段により、走行状況に応じて変化する禁止時間が経過してから追従走行制御を再開する。そのため、例えば、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときなどに、直ちにブレーキを作動して減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて減速が開始され、運転者に違和感を与えることがなく、その間の走行状況の変化によってブレーキ操作の回数も減少する。しかも、減速度を小さくするのではなく、走行状況に応じて変化する禁止時間を設定し、その時間には追従走行制御を行なわないようにしてブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止することができ、交通の流れの妨げや渋滞の原因等になる可能性を回避しつつ適切なタイミングで追従走行制御の減速や加速が行なえる。
【0016】
さらに、前記禁止時間が走行状況に応じて長短変化し、追従走行制御中に先行車や自車のレーンチェンジ等によって先行車が検出できなくなったときには、前記禁止時間が長くなって新たな先行車との車間距離が大きく開いたりせず、急加速を行なわなくて済み、交通の流れを乱すことがない。また、頻繁な加減速によって運転者にギクシャク感を与えることもない。
【0017】
したがって、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の減速や加速が行なえる。
【0018】
請求項2に係る本発明の追従走行制御装置の場合、ブレーキが作動する減速の走行状況への変化が発生し、実車間距離が目標車間距離に対して小さくなるときに、追従走行制御を一旦禁止し、その禁止を解除するタイミングを設定するための前記禁止時間を、実車間距離が目標車間距離に対して長くなって安全になる程長くし、ブレーキが作動する減速制御のより具体的な構成を提供できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態の追従走行制御装置のブロック図である。
【図2】図1の一部の詳細なブロック図である。
【図3】図2の一部の詳細なブロック図である。
【図4】図2の動作説明用のフローチャートである。
【図5】本発明の他の実施形態の追従走行制御装置の一部のブロック図である。
【図6】図5の一部の詳細なブロック図である。
【図7】図5の動作説明用のフローチャートである。
【発明を実施するための形態】
【0020】
つぎに、本発明をより詳細に説明するため、実施形態について、図1〜図7を参照して詳述する。
【0021】
(一実施形態)
まず、ブレーキが作動する追従走行制御の減速に適用した一実施形態について、図1〜図4を参照して説明する。
【0022】
図1は自車1に搭載された本実施形態の追従走行制御装置を示し、図1において、2は制御モードの切り替え等を操作設定する制御スイッチ、3はワイパー動作に連動するワイパースイッチ、4は画像センサとしてのカメラであり、モノクロまたはカラーのCCD単眼カメラ、ステレオカメラ等からなり、車室内に自車前方を撮影するように設けられている。
【0023】
5は車両1のフロントバンパー部等に設けられた測距レーダであり、レーザレーダ、ミリ波レーダ等のスキャン式の種々のレーダからなり、自車前方を左右方向(横幅方向)にスキャンしながら探査する。6は自車1の車速センサ(車輪速センサ)であり、時々刻々の自車速を検出する。7、8は舵角センサ、ヨーレートセンサであり、自車挙動の舵角、ヨーレートを検出する。
【0024】
9はアクセルペダルの踏み込みを検出するアクセルペダルセンサである。10はブレーキペダルの踏みこみを検出するブレーキペダルセンサである。
【0025】
11はマイクロコンピュータ等からなるECU構成の追従走行制御部であり、予め設定された追従走行制御のプログラムを実行し、後述する追従走行制御の加減速指令、制動指令等を出力し、衝突の注意報や回避等の表示・警報を制御する。
【0026】
12、13、14は追従走行制御部11の指令等にしたがって動作する表示警報ユニット、スロットル制御ユニット、ブレーキ制御ユニットそれぞれであり、表示警報ユニット12は例えば表示インストルメントパネルの適当な位置に設けられて衝突の注意報や回避等を表示・警報する。スロットル制御ユニット13は追従走行制御の加速指令にしたがって車両1のスロットル開度を操作し、車両1の加速を制御する。ブレーキ制御ユニット14は追従走行制御の減速指令にしたがって車両1のブレーキ機構を制御し、車両1のブレーキを作動する。15はブレーキ制御ユニット14のブレーキの作動中に点灯するブレーキランプである。
【0027】
追従走行制御部11は、追従走行制御のプログラムを実行することにより、周知の追従走行制御と同様、概略、つぎに説明するように動作する。
【0028】
制御スイッチ2により追従走行のモードが選択されることを条件に、追従走行制御部11が追従走行制御のプログラムを実行し、レーダ5の探査結果に基づく自車1と先行車との車間距離の情報、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で先行車を検出し、自車1と先行車との計測した車間距離(実車間距離)の情報、車速センサ6から得られる自車1の車速(自車速)の情報および、舵角センサ7、ヨーレートセンサ8の自車1の挙動の情報、アクセルペダルセンサ9のアクセルペダルの踏み込みの情報、ブレーキペダルセンサ10のブレーキペダルの踏み込みの情報等をくり返し収集する。
【0029】
さらに、時々刻々の実車間距離、自車速等に基づき、追従走行制御部11は、先行車があるときは、走行目標として、時々刻々の追従走行制御の目標車間距離を設定し、実車間距離が目標車間距離になるように、制御ユニット11、12に加速指令、減速指令それぞれを与えて自車1を加減速制御する。なお、先行車が存在しない状態では、走行目標が設定された目標車速になり、この目標車速になるように自車1を加減速する。
【0030】
目標車間距離は、運転者による制御スイッチ2の選択操作等によって設定され、例えば選択された車間時間をそのときの先行車の相対速度に基づいて換算した距離である。
【0031】
追従走行制御部11は、本実施形態の場合、前記追従走行の減速制御を運転者に違和感を与えることなく、かつ、交通の流れの妨げや渋滞の原因等になる可能性を回避する適切なタイミングでブレーキを作動するため、本発明の制御禁止手段、禁止解除手段を備える。
【0032】
制御禁止手段は、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対して短い方にずれたときに追従走行制御を一旦禁止する。禁止解除手段は、走行状況に応じて変化する禁止時間を算出し、算出した禁止時間が経過した後に追従走行制御の前記禁止を解除して追従走行制御を再開する。
【0033】
図2は、減速制御時の前記制御禁止手段、前記禁止解除手段をソフトウェアで形成することによって追従走行制御部11が備える制御禁止処理部16の具体的な減速時のブレーキ一時禁止の構成例を示し、例えば、実車間距離Diの時間変化から時々刻々の先行車の相対速度Vri(m/s)を検出し、実車間距離Diと目標車間距離との偏差(ずれ)および相対速度Vri(m/s)から時々刻々の自車1の追従走行制御の目標加減速度Gt(m/s2)を求める。本実施形態の場合、直接の走行目標は目標加減速度Gtである。
【0034】
そして、可変禁止時間設定部16aにより、走行状況に応じて変化する減速制御の禁止時間TBx(s)を、例えば予め設定された目標加減速度Gtと禁止時間TBxのマップから算出する。なお、走行状況の指標は、最も広義には実車間距離Diであるが、その時間変化である相対速度Vriであってもよく、好ましくは目標加減速度Gtである。また、禁止時間TBxの一例は数秒〜数百ミリ秒である。さらに、目標加減速度Gtが負になるブレーキの作動時、目標加減速度Gtが負の大きな値になり、実車間距離Diが短くなって衝突の可能性が高くなる程、安全性を確保するために禁止時間TBxは短くなり、逆に、目標加減速度Gtの絶対値が小さくなり、実車間距離Diが長くなって安全になる程、禁止時間TBxは長くなる。
【0035】
一方、固定禁止時間設定部16bには、減速制御の禁止時間として、減速制御の所定の禁止時間TBfix(s)、具体的には禁止時間TBxの最も長い時間が設定される。
【0036】
そして、減速制御の禁止時間TBx、TBfixが禁止時間選択部16cに入力され、禁止時間選択部16cはブレーキ禁止時間可変判定部16dの判定結果の選択出力SWにより、禁止時間TBx、TBfixのいずれかを実際の減速制御の禁止時間TByとして択一的に選択する。
【0037】
ブレーキ禁止時間可変判定部16dは、禁止時間TByを可変するか否かを判定する。そして、減速制御時、少なくとも実車間距離Diが長く、さらに実際の相対速度Vriも大きく、先行車が離れる傾向を示して安全と判断した場合は、禁止時間TByとして十分長い所定の禁止時間TBfixを選択し、それ以外の場合は、禁止時間TByとして禁止時間TBfixより短くなる可変禁止時間設定部16aの可変値の禁止時間TBxを選択する。
【0038】
図3はブレーキ禁止時間可変判定部16dの詳細な構成例を示し、マップ部17aにより、実車間距離Diに対して、禁止時間TByを所定の禁止時間TBfixに設定しても安全であるしきい値の相対速度Vrb(m/s)を、予め設定された実車間距離Diと相対速度Vrbのマップから求める。さらに、判定処理部17bにより、しきい値の相対速度Vrbと、時々刻々の実車間距離Diの変化から実測される実際の相対速度Vriとを比較し、Vrb≧Vriの条件(実際の相対速度Vriがしきい値の相対速度Vrbより小さく自車1が先行車に接近している条件)が成立して十分に安全とはいえないと判定したときは、判定処理部17bから禁止時間選択部16cに与える選択制御出力(または選択フラグ)SWbを、可変禁止時間設定部16aの禁止時間TBxを選択するオン(セット)出力とし、前記条件が不成立で十分に安全であると判定したときは、固定禁止時間設定部16bの禁止時間TBfixを選択するオフ(リセット)出力とする。
【0039】
そのため、禁止時間選択部16cは、禁止時間TBfixに設定して安全なときには禁止時間TByとして禁止時間TBfixを選択し、それ以外の時には禁止時間TByとして走行状況に応じて禁止時間TBfixより短くなる可変禁止時間設定部16aの禁止時間TBxを選択する。
【0040】
さらに、禁止時間選択部16cの禁止時間TByは、ブレーキ禁止時間の設定可否判定部16eに送られ、設定可否判定部16eは、計時部16fの計時結果に基づき、禁止時間TByを設定するか否かを判定する。
【0041】
そして、本実施形態の場合、禁止時間TByを、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するときのいずれかの追従走行制御の走行状況において設定するものとする。これらの走行状況においては、運転者は少し様子を見てからブレーキをかけるのが普通だからである。
【0042】
そこで、計時部16fにより、(1)レーダ5の探査結果に基づく自車1と先行車との車間距離の情報、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で新たな先行車(新規車両)を特定して検出したときには、新規車両の検出後から現在までの時間を計時する。(2)先行車が接近した状態で追従走行制御装置をオンしてから現在までの時間を計時する。(3)アクセルペダルセンサ9の出力からアクセルオーバライドの発生、解除を検知し、アクセルオーバライドが解除されてから現在までの時間を計時する。
【0043】
そして、設定可否判定部16eは、禁止時間選択部16cの禁止時間TByと計時部16fの計時時間TCbとを比較し、TBy≧TCbが成立する禁止時間TByには、ブレーキ作動禁止フラグFBDをオンする。
【0044】
さらに、ブレーキ作動禁止フラグFBDによりブレーキ作動指令フラグFBKの出力ゲート16gを制御し、追従走行制御部11の周知の追従走行制御により,少なくとも前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速して先行車に接近する、アクセルオーバライドが実施されて自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するとき、それぞれに形成されるブレーキ作動指令フラグFBKを、ブレーキ作動禁止フラグFBDがオンしている禁止時間TByには出力ゲート16gから図1のブレーキ制御ユニット14に出力しないようにして減速制御を禁止する。
【0045】
すなわち、これらの減速制御が行なわれる走行状況にあっては、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して短い方にずれることにより、ブレーキ作動指令フラグFBKは直ちに形成される。このブレーキ作動指令フラグFBKをブレーキ制御ユニット14に与えて減速制御を実施し、ブレーキを直ちに作動すると、運転者に違和感を与える。そこで、これらの減速制御が行なわれる走行状況にあっては、実車間距離Diが目標車間距離に対して短い方にずれたときに制御禁止処理部16が形成する制御禁止手段により、ブレーキ作動禁止フラグFBDをオンして出力ゲート16gを閉じ、出力ゲート16gからブレーキ制御ユニット14にブレーキ作動指令フラグFBKを出力しないようにしてブレーキの作動を一旦禁止し、禁止時間TByが経過した後、制御禁止処理部16が形成する禁止解除手段によりブレーキ作動禁止フラグFBDをオフして出力ゲート16gを開き、出力ゲート16gからブレーキ制御ユニット14にブレーキ作動指令フラグFBKを出力してブレーキを作動する。なお、そのときに走行状況が変わってブレーキ作動指令フラグFBKがオフしていれば、ブレーキは作動しない。また、ブレーキ作動指令フラグFBKにしたがってブレーキ制御ユニット14がブレーキを作動する間は、ブレーキ制御ユニット14によってブレーキランプ15が点灯する。
【0046】
図4は追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して短いほうにずれたときに制御禁止処理部16により行なわれる上記の減速制御の処理手順を示し、実車間距離Diが目標車間距離に対して短いほうにずれると、目標減加速度Gtから減速制御の禁止時間TBxを算出し(ステップS1)、実車間距離Diからしきい値の相対速度Vrbを算出する(ステップS2)。
【0047】
つぎに、Vrb≧Vriの条件が成立すれば、ステップS3をYESで通過し、実際の減速制御の禁止時間TByとして禁止時間TBxを選択し(ステップS4)、Vrb≧Vriの条件が成立しなければ、ステップS3をNOで通過し、実際の減速制御の禁止時間TByとして禁止時間TBfixを選択する(ステップS5)。
【0048】
さらに、ステップS4またはステップS5からステップS6に移行して計時部16fの計時を実行し、TBy≧TCbが成立する禁止時間TBy内は、ステップS7をYESで通過してブレーキ作動禁止フラグFBDをオンにセットし(ステップS8)、ブレーキ作動指令フラグFBKによる減速制御を禁止する。TBy≧TCbが成立しなくなって禁止時間TByが終了すれば、ステップS7をNOで通過してブレーキ作動禁止フラグFBDをオフにリセットし(ステップS9)、ブレーキ作動指令フラグFBKによる減速制御の禁止を解除する。
【0049】
このようにすることによって、前記した(1)追従走行制御中に白車レーンへの車両の割り込みや自車のレーンチェンジによって先行車が入れ替わり、先行車が接近した状態になってブレーキが作動するとき、(2)先行車が接近した状態で追従走行制御装置をオンし、ブレーキが作動するとき、(3)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速してアクセルオーバライドが実施され、自車が先行車に接近した後、アクセルペダルから足を離したことによってブレーキが作動するとき、それぞれに直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて減速が開始され、運転者に違和感を与えることがなく、その間の走行状況の変化によってブレーキ操作の回数も減少する。しかも、減速度を小さくするのではなく、走行状況に応じて変化する禁止時間TByを設定し、その時間には追従走行制御を行なわないようにしてブレーキランプ15を点灯しないため、自車1のブレーキランプ15の点灯に応動して後続車が次々とブレーキをかける事態の発生を防止し、交通の流れの妨げや渋滞の原因等になる可能性を回避しつつ運転者に違和感を与えない適切なタイミングでブレーキを作動できる。
【0050】
したがって、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速が行なえる。
【0051】
また、本実施形態の場合、ブレーキが作動する減速の走行状況への変化が発生し、実車間距離Diが目標車間距離に対して小さくなるときに、追従走行制御によるブレーキの作動を一旦禁止し、その禁止を解除するタイミングを設定するための禁止時間TByを、実車間距離Diが長くなって目標加減速度Gtの絶対値が小さくなり、ブレーキをかけても安全になる程長くすることにより、減速制御の具体的な構成を提供できる。
【0052】
なお、ブレーキの作動が必要な走行状況を「運転者の操作直後」と「走行環境が変化した直後」に分類すると、「運転者の操作直後」としては、先行車両に接近した状態でのオーバーライド解除直後、先行車両に接近した状態での追従走行制御の開始直後、運転者目標車間距離の長から短への変更直後等が考えられる。また、「走行環境が変化した直後」としては、先行車両と自車両との間への新たな先行車の割り込みが発生したとき、カーブを走行している隣車線の車両を自車線の先行車と誤認識したときなどが考えられる。そして、これらの走行状況下において、本実施形態の減速制御を行なうことにより、運転者に違和感を与えない適切なタイミングで減速制御を行なってブレーキを作動できるのは勿論である。
【0053】
また、前記特許文献1に記載の制御は相対速度と車間距離偏差のゲインを低減するものであるため、低速の追従走行制御時(例えば、車速40km/h未満)であっても、中高速の追従走行制御時(例えば、車速40km/h以上)であっても、同じ減速度のブレーキが作動する。そして、例えば、自車1と先行車との車間距離偏差が5mであっても、80km/hの走行時と20km/hの走行時とでは、ブレーキが作動して交通の流れを阻害する減速の程度が異なることから、前記特許文献1に記載の制御では、低速から中高速までの追従走行の減速を交通の流れを阻害しないように円滑に行なうことはできないが、本実施形態の場合、禁止時間TBxの可変判定を相対速度Vriによって行なうため、同じ車間距離であっても、相対速度Vriによってブレーキの作動を禁止する時間が変化し、低速から中高速までの追従走行の減速を交通の流れを阻害しないように円滑に行なうことができる。
【0054】
(他の実施形態)
つぎに、加速制御に適用した他の実施形態について、図1および図5〜図7を参照して説明する。
【0055】
本実施形態の場合も図1の追従走行制御装置に適用する。追従走行制御部11は追従走行の加速制御を運転者に違和感を与えることなく実行するため、制御禁止処理部16の制御禁止手段、禁止解除手段に、つぎに説明する機能を、単独で、または、前記一実施形態の機能とともに備える。
【0056】
すなわち、制御禁止手段は、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれて加速制御が必要になったときにも追従走行制御を一旦禁止する。禁止解除手段は、走行状況に応じて変化する禁止時間を算出し、算出した禁止時間が経過した後に追従走行制御の前記禁止を解除して追従走行制御を再開する。
【0057】
図5は、加速制御時の前記制御禁止手段、前記禁止解除手段をソフトウェアで形成することにより、追従走行制御部11が図1の制御禁止処理部16に代えて、または、制御禁止処理部16ともに備える制御禁止処理部18の具体的な加速時の加速一時禁止の構成例を示し、加速制御の制御禁止処理部18は、減速制御の制御禁止処理部16と同様、例えば、実車間距離Diの時間変化から時々刻々の先行車の相対速度Vri(m/s)を検出し、実車間距離Diと目標車間距離との偏差(ずれ)および相対速度Vri(m/s)から時々刻々の自車1の追従走行制御の目標加減速度Gt(m/s2)を求める。なお、図1には追従走行制御部11が制御禁止処理部16、18を備えた状態を示す。
【0058】
そして、可変禁止時間設定部18aにより、走行状況に応じて変化する加速制御の禁止時間TAx(s)を、例えば予め設定された目標加減速度Gtと禁止時間TAxのマップから算出する。なお、走行状況の指標は、加速制御であっても、最も広義には実車間距離Diであり、その変化である相対速度Vriであってもよく、好ましくは目標加減速度Gtである。また、禁止時間TAxの一例も数秒〜数百ミリ秒であり、目標加減速度Gtが正になる加速制御時、目標加減速度Gtが正の大きな値になり、実車間距離Diが長くなって先行車が離れていくときは、早く加速制御を開始するように禁止時間TAxは短くなり、逆に、目標加減速度Gtが小さくなり、実車間距離Diが短くなる程、禁止時間TAxは長くなって加速制御を開始するまでの走行状況の様子を見るための「間」を長くする。
【0059】
一方、固定禁止時間設定部18bには、加速制御の禁止時間として、標準的な「間」をとる加速制御の所定の禁止時間TAfix(s)、具体的には禁止時間TAxの最も長い時間が設定される。
【0060】
そして、加速制御の禁止時間TAx、TAfixが禁止時間選択部18cに入力され、禁止時間選択部18cは加速禁止時間可変判定部18dの判定結果の選択出力SWaにより、禁止時間TAx、TAfixのいずれかを実際の加速制御の禁止時間TAyとして択一的に選択する。
【0061】
加速禁止時間可変判定部18dは、禁止時間TAyを可変するか否かを判定する。そして、加速制御時、実車間距離Diに比して実際の相対速度Vriが小さく、先行車に略追従している場合は、禁止時間TAyとして所定の禁止時間TAfixを選択し、それ以外の場合は、禁止時間TAyとして禁止時間TAfixより短い可変禁止時間設定部18aの可変値の禁止時間TAxを選択する。
【0062】
図6は加速禁止時間可変判定部18dの詳細な構成例を示し、マップ部19aにより、実車間距離Diに対して、禁止時間TAyを所定の禁止時間TAfixに設定しても先行車から遅れるおそれがない相対速度Vriを、しきい値の相対速度Vra(m/s)として求める。さらに、判定処理部19bにより、しきい値の相対速度Vraと、時々刻々の相対速度Vriとを比較し、Vra≦Vriの条件が成立したときは、判定処理部17bから禁止時間選択部19cに与える選択出力(または選択フラグ)SWを、可変禁止時間設定部19aの禁止時間TAxを選択するオン(セット)出力とし、前記条件が不成立で十分な「間」が取れると判定したときは、固定禁止時間設定部19bの禁止時間TAfixを選択するオフ(リセット)出力とする。
【0063】
そのため、禁止時間選択部19cは、禁止時間TAfixに設定して問題のないときには禁止時間TAyとして禁止時間TAfixを選択し、それ以外の時には禁止時間TAyとして走行状況に応じて禁止時間TAfixより短くした可変禁止時間設定部16aの禁止時間TAxを選択する。
【0064】
さらに、禁止時間選択部19cの禁止時間TAyは、加速禁止時間の設定可否判定部19eに送られ、設定可否判定部19eは、計時部19fの計時結果に基づき、加速制御の禁止時間TAyを設定するか否かを判定する。
【0065】
そして、本実施形態の場合、禁止時間TAyを、(1)運転者が制御スイッチ2を操作して目標車間距離を短から長に変更したとき、(2)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速することが止められて、アクセルオーバライドが解除された直後、(3)追従走行制御を開始した直後、(4)先行車を見失ったときのいずれかの走行状況において設定するものとする。
【0066】
これらの走行状況においては、追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれることにより、直ちに加速したり、長い「間」をとって加速を開始すると、先行車との関係において、ギクシャクした運転状況になり、運転者に違和感を与える可能性がある。
【0067】
そこで、計時部19fにより、(1)制御スイッチ2の操作による目標車間距離の短から長への変更が発生したとききは、その検出後から現在までの時間を計時する。(2)アクセルペダルセンサ9の出力からアクセルオーバライドの発生、解除を検知したときには、アクセルオーバライドが解除されてから現在までの時間を計時する。(3)エンジンスタートや運転者のモード切替等によって追従走行制御を開始したときは、その直後から現在までの時間を計時する。(4)レーダ5の探査結果、あるいは、カメラ4の撮影画像とレーダ5の探査結果の情報とに基づく周知のセンサフュージョンの処理で捕捉していた先行車を見失ったときは、その直後から現在までの時間を計時する。
【0068】
そして、設定可否判定部19eは、禁止時間選択部19cの禁止時間TAyと計時部19fの計時時間TCaとを比較し、TAy≧TCaが成立する加速禁止時間Tyには、加速禁止フラグFADをオンする。
【0069】
さらに、加速禁止フラグFADにより加速作動指令フラグFACの出力ゲート19gを制御し、追従走行制御部11の周知の追従走行制御により、少なくとも前記した(1)制御スイッチ2の操作による目標車間距離の短から長への変更が発生して加速するとき、(2)アクセルオーバライドが解除されたが、先行車の加速等によって引き続き加速するとき、(3)追従走行制御を開始して加速するとき、(4)レーンチェンジ等で先行車を見失って設定された定速走行状態まで加速するとき、それぞれに形成される加速指令フラグFACを、加速禁止フラグFADがオンしている禁止時間TAxには出力ゲート19gからスロットル制御ユニット13に出力しないようにして加速制御を禁止する。
【0070】
図7は追従走行制御中に走行状況が変化して実車間距離Diが目標車間距離に対して長い方にずれたときに制御禁止処理部16により行なわれる上記の加速制御の処理手順を示し、実車間距離Diが目標車間距離に対して長い方にずれると、目標減加速度Gtから加速制御の禁止時間TAxを算出し(ステップQ1)、実車間距離Diからしきい値の相対速度Vraを算出する(ステップQ2)。
【0071】
つぎに、Vra≦Vriの条件が成立すれば、ステップQ3をYESで通過し、実際の加速禁止時間として禁止時間TAxを選択し(ステップQ4)、Vra≦Vriの条件が成立しなければ、ステップQ3をNOで通過し、実際の加速禁止時間として禁止時間TAfixを選択する(ステップQ5)。
【0072】
さらに、ステップQ4またはステップQ5からステップQ6に移行して計時部19fの計時を実行し、TAy≧TCaが成立する禁止時間TAy内は、ステップQ7をYESで通過して加速禁止フラグFADをオンにセットし(ステップQ8)、加速指令フラグFACによる加速制御を禁止する。TAy≧TCaが成立しなくなって禁止時間TAyが終了すれば、ステップQ7をNOで通過して加速禁止フラグFADをオフにリセットし(ステップQ9)、加速指令フラグFACによる加速制御の禁止を解除する。
【0073】
このようにすることによって、前記した(1)運転者が制御スイッチ2を操作して目標車間距離を短から長に変更したとき、(2)追従走行制御中にアクセルペダルを踏んで運転者の意思で加速することが止められて、アクセルオーバライドが解除された直後、(3)追従走行制御を開始した直後、(4)先行車を見失ったとき、それぞれに直ちに加速するのでなく、運転者のアクセルペダル操作に即するように禁止時間の「間」をおいて加速が開始される。この場合、不必要な加速と減速のくり返し等が抑制されて、運転者に違和感を与えることがなく、交通の流れを阻害することもない。
【0074】
したがって、本実施形態の場合、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の加速が行なえる。
【0075】
なお、加速制御が必要な走行状況を、「運転者の操作直後」と「走行環境が変化した直後」に分類すると、「運転者の操作直後」としては、前記したオーバーライド解除直後、追従走行制御の開始直後、運転者目標車間距離の短から長への変更直後等が考えられる。また、「走行環境が変化した直後」としては、前記した先行車両を見失った直後などが考えられる。そして、これらの走行状況下においては、本実施形態の加速制御を行なうことにより、前記したように運転者に違和感を与えない適切なタイミングで加速が行なえる。
【0076】
つぎに、前記一実施形態の減速制御と前記他の実施形態の加速制御の両方の機能を備え、走行状況に応じて(具体的には、実車間距離Diの目標車間距離に対するずれ方によって)、減速制御と加速制御を選択的に行なうようにすれば、交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚により近いタイミングで追従走行制御の加減速が行なえる。
【0077】
そして、本発明は上記した両実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、前記両実施形態の追従走行制御部11が備える制御禁止処理部16、18等の構成や処理手順は、前記両実施形態のものに限るものではない。
【0078】
また、禁止時間TAfix、TBfix等は、適当に設定してよいのは勿論である。
【0079】
そして、本発明は、種々の車両の追従走行制御装置に適用できる。
【符号の説明】
【0080】
1 自車
11 追従走行制御部
16、18 制御禁止処理部
【特許請求の範囲】
【請求項1】
走行目標を維持するように自車を追従走行制御により加減速する追従走行制御装置であって、
追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止する制御禁止手段と、
走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開する禁止解除手段とを備えたことを特徴とする追従走行制御装置。
【請求項2】
請求項1に記載の追従走行制御装置において、
前記走行状況の変化はブレーキをかける状況への変化であり、
前記制御禁止手段は、走行状況の変化によって前記実車間距離が前記目標車間距離に対して小さくなるときに追従走行制御を一旦禁止し、
前記禁止時間は、前記実車間距離が長くなる程長くなることを特徴とする追従走行制御装置。
【請求項1】
走行目標を維持するように自車を追従走行制御により加減速する追従走行制御装置であって、
追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止する制御禁止手段と、
走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開する禁止解除手段とを備えたことを特徴とする追従走行制御装置。
【請求項2】
請求項1に記載の追従走行制御装置において、
前記走行状況の変化はブレーキをかける状況への変化であり、
前記制御禁止手段は、走行状況の変化によって前記実車間距離が前記目標車間距離に対して小さくなるときに追従走行制御を一旦禁止し、
前記禁止時間は、前記実車間距離が長くなる程長くなることを特徴とする追従走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−195122(P2011−195122A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−67161(P2010−67161)
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]