
追突警報装置および追突警報方法
【課題】
自車両と先行車の衝突を防止するための警報を発する際に、自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供すること。
【解決手段】
S20にて先行車が車線変更を行っていると判定された場合、S21にて自車両が先行車の追越しを行っていると判定された場合、または、S22にて自車両が減速を伴いながら先行車に接近していると判定された場合は、警報を発するタイミングを調節することで不要な警報を発することが防止される。これによって、運転者の不快感が和らげられる。
自車両と先行車の衝突を防止するための警報を発する際に、自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供すること。
【解決手段】
S20にて先行車が車線変更を行っていると判定された場合、S21にて自車両が先行車の追越しを行っていると判定された場合、または、S22にて自車両が減速を伴いながら先行車に接近していると判定された場合は、警報を発するタイミングを調節することで不要な警報を発することが防止される。これによって、運転者の不快感が和らげられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両と先行車の衝突を防止するための警報を発する追突警報装置および追突警報方法に関するものである。
【背景技術】
【0002】
従来、自車両と先行車の衝突を防止するための警報を発する車両用警報装置として、例えば特開平5-162596号公報に示されているように、ブレーキ操作時における車間距離と平常運転時における車間距離の平均値および標準偏差から運転者の意識レベルを評価し、この評価結果に応じて警報を発するタイミングを調整する装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5-162596号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような車両用警報装置においては、自車両の走行状況(例えば、通常の走行状況、先行車が車線変更をしている状況、自車両が先行車を追越している状況等)にかかわらず警報を発するか否かの判断基準が一定であった。そのため、走行状況によっては衝突の危険性が低いにもかかわらず不要な警報が発せられる場合があり、運転者の不快感が増してしまうという問題があった。
【0005】
そこで本発明は、このような技術課題を解決するためになされたものであって、自車両と先行車の衝突を防止するための警報を発する際に、自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
すなわち、本発明にかかる追突警報装置は、自車両と障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定手段と、前記走行状況判定手段により前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に前記警報発生手段が発する警報のタイミングを調節するタイミング調節手段とを備える。
【0007】
この発明によれば、走行状況判定手段により自車両と障害物の関係が一定条件を満たすため自車両が警報の不要な走行状況にあると判定された場合に警報発生手段が発する警報のタイミングが調整される。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0008】
また、本発明にかかる追突警報装置は、自車両と先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段と、前記先行車車線変更判定手段により前記先行車が車線変更を行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせるタイミング調節手段とを備えるものであってもよい。
【0009】
この発明によれば、先行車車線変更判定手段により先行車が車線変更を行っていると判定された場合に警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0010】
また、本発明にかかる追突警報装置において、前記先行車車線変更判定手段は、前記自車両と前記先行車が車幅方向に重っている割合を表すラップ率および前記自車両の加速度に基づいて判定を行うことが好適である。
【0011】
この場合には、ラップ率および自車両の加速度の二種類のパラメータに基づいて先行車が車線変更を行っているか否かが判定されるため、正確な判定が可能となる。
【0012】
また、本発明にかかる追突警報装置において、前記追突警報装置は、前記自車両の操舵角が閾値以上になったか否かで前記自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段を備え、前記タイミング調節手段は、前記追越し判定手段により前記自車両が前記先行車の追越しを行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせることが好ましい。
【0013】
この場合には、先行車が車線変更を行っている状況と判定された場合のみならず、追越し判定手段により自車両が先行車の追越しを行っていると判定された場合にも警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感がさらに和らげられる。
【0014】
また、本発明にかかる追突警報装置において、前記追突警報装置は、前記自車両の減速度が閾値以上になったか否かで前記自車両が減速を伴いながら前記先行車に接近しているか否かを判定する減速判定手段を備え、前記タイミング調節手段は、前記減速判定手段により前記自車両が減速を伴いながら前記先行車に接近していると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせることが好ましい。
【0015】
この場合には、先行車が車線変更を行っている状況と判定された場合および自車両が先行車の追越しを行っている状況と判定された場合に加え、減速判定手段により自車両が減速を伴いながら先行車に接近していると判定された場合にも警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が一層和らげられる。
【0016】
また、本発明にかかる追突警報方法は、障害物に対して警報を発する追突警報方法であって、自車両と障害物との相対距離が閾値以下になった場合、または、自車両と障害物の衝突余裕時間が閾値以下になった場合に、自車両と障害物の関係が一定条件を満たすか否かを判定する走行状況判定ステップと、走行状況判定ステップで自車両と障害物の関係が一定条件を満たすと判定された場合に、警報が発せられるタイミングを調節するタイミング調節ステップとを有する。
【0017】
この発明によれば、走行状況判定ステップで自車両と障害物の関係が一定条件を満たすため自車両が警報の不要な走行状況にあると判定された場合に警報が発せられるタイミングが調整される。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0018】
また、本発明にかかる追突警報方法は、先行車に対して警報を発する追突警報方法であって、自車両と先行車との相対距離が閾値以下になった場合、または、自車両と先行車の衝突余裕時間が閾値以下になった場合に、先行車が車線変更を行っているか否かを判定する先行車車線変更判定ステップと、先行車車線変更判定ステップで先行車が車線変更を行っていると判定された場合に、警報が発せられるタイミングを遅らせるタイミング調節ステップとを有するものであっても良い。
【0019】
この発明によれば、先行車車線変更判定ステップで先行車が車線変更を行っていると判定された場合に警報が発せられるタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【発明の効果】
【0020】
本発明によれば、自車両と先行車の衝突を防止するための警報を発する際に自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供することが可能である。
【図面の簡単な説明】
【0021】
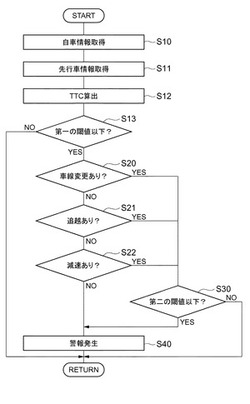
【図1】先行車が車線変更をしている状況の例を示す図である。
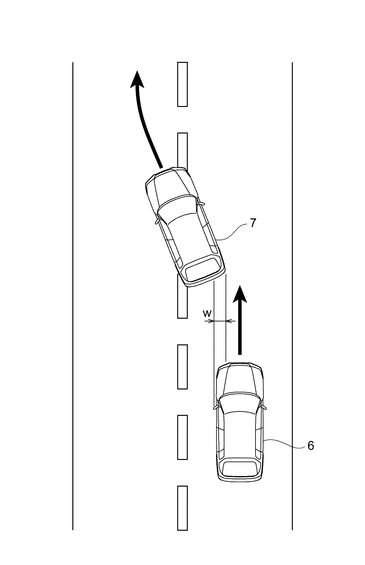
【図2】自車両が先行車の追越しをしている状況の例を示す図である。
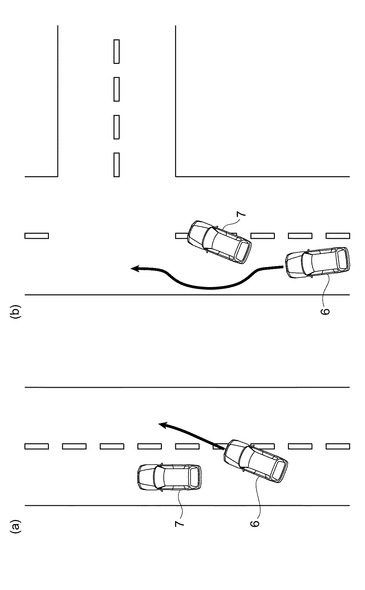
【図3】自車両が減速を伴いながら先行車に接近している状況の例を示す図である。
【図4】本発明の実施形態に係る追突警報装置の構成概要図である。
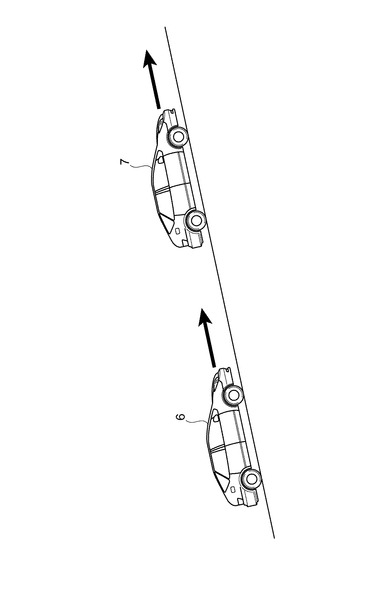
【図5】図4の追突警報装置における動作及び本実施形態に係る追突警報方法を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照して本発明の実施形態について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0023】
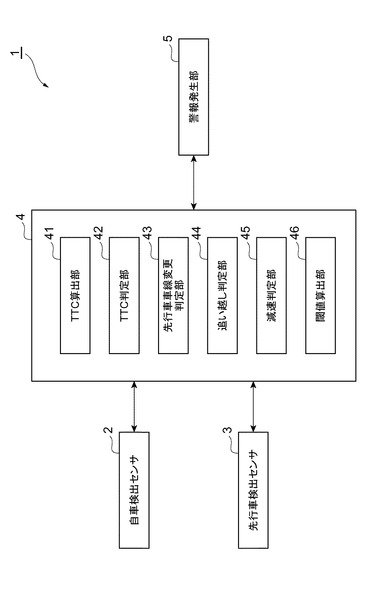
図4は、本実施形態に係る追突警報装置1の構成概要図である。追突警報装置1は、車両に搭載されるものであり、自車両と障害物たる先行車の衝突を防止するための警報を発する装置である。本実施形態に係る追突警報方法は、追突警報装置1により実行される。図4に示すように、追突警報装置1は、自車検出センサ2、先行車検出センサ3、ECU(Electronic Control Unit)4および警報発生部5より構成されている。
【0024】
自車検出センサ2は、自車両の情報を検出するためのセンサである。自車検出センサ2としては、例えば、車輪速センサ、舵角センサ、ギア段センサ、重力加速度センサ、アクセルセンサおよびブレーキセンサなどが用いられる。これらを用いることで、それぞれ、車速情報、操舵角情報、現ギア段情報、車両傾き情報、加速情報および減速情報が検出される。
【0025】
先行車検出センサ3は、先行車の情報を検出するためのセンサである。先行車検出センサ3としては、例えば、カメラ、ミリ波レーダセンサおよびレーザレーダセンサなどが用いられる。カメラを用いることで、先行車の車幅や相対横位置が検出される。また、ミリ波レーダセンサなどを用いることにより、先行車の相対距離や相対速度が検出される。
【0026】
ECU4は、追突警報装置1の装置全体の制御を行うものであって、例えばCPU、ROM、RAMを含むコンピュータを主体として構成されている。ECU4は、自車検出センサ2および先行車検出センサ3と接続され、自車検出センサ2および先行車検出センサ3により検出した自車情報および先行車情報などを受信して記憶する。
【0027】
ECU4は、自車両と先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段として機能する。また、ECU4は、自車両と障害物たる先行車の関係が一定条件を満たすか否かを判定する走行状況判定手段としても機能し、具体的には、先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段、自車両の操舵角が閾値以上になったか否かで自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段、自車両の減速度が閾値以上になったか否かで自車両が減速を伴いながら先行車に接近しているか否かを判定する減速判定手段として機能する。また、ECU4は、先行車車線変更判定手段により先行車が車線変更を行っていると判定された場合、追越し判定手段により自車両が前記先行車の追越しを行っていると判定された場合、または、減速判定手段により自車両が減速を伴いながら先行車に接近していると判定された場合に、警報を出すタイミングを調節するタイミング調節手段としても機能する。
【0028】
ECU4は、TTC(Time to collision)算出部41、TTC判定部42、先行車車線変更判定部43、追越し判定部44、減速判定部45および閾値算出部46を備えている。
【0029】
TTC算出部41は、自車両と先行車との衝突余裕時間、すなわちTTCを算出するものであり、自車検出センサ2、先行車検出センサ3によって取得された自車情報および先行車情報に基づいてTTCを算出する。
【0030】
TTC判定部42は、TTC算出部41にて算出されたTTCが、閾値算出部46にて記憶または算出された第一の閾値以下であるか否かを判定する。また、TTC判定部42は、先行車車線変更判定部43によって先行車が車線変更を行っているとされた場合、追越し判定部44によって自車両が先行車の追越しを行っていると判定された場合、または、減速判定部45によって自車両が減速を伴いながら先行車に接近していると判定された場合に、警報発生部5から発せられる警報を出すタイミングを調節する。具体的には、TTC算出部41にて算出されたTTCが、閾値算出部46にて記憶または算出された第二の閾値以下であるか否かを判定し、TTCが第二の閾値以下であると判定された場合にのみ警報発生部5に警報を発するための信号を送ることで警報を出すタイミングを調節する。ここで、第二の閾値は、先行車が車線変更を行っている等の衝突の危険性が低い走行状況下にあるなかで警報を発するか否かを判定するための判定基準である。よって、第二の閾値は、通常の走行状況に適用される第一の閾値よりも小さい値が設定される。
【0031】
先行車車線変更判定部43は、先行車が車線変更を行っているか否かを判定する。例えば、自車検出センサ2および先行車検出センサ3によって得られた自車情報および先行車情報から自車両と先行車が車幅方向に重っている割合を表すラップ率および自車両の加速度を求め、これらの値と閾値算出部46にて記憶または算出された閾値に基づいて先行車が車線変更を行っているか否かを判定する。
【0032】
追越し判定部44は、自車両が先行車の追越しを行っているか否かを判定する。例えば、自車検出センサ2によって得られた自車両の操舵角が閾値算出部46にて記憶または算出された閾値以上であるか否かを判定することで、自車両が先行車の追越しを行っているか否かを判定する。
【0033】
減速判定部45は、自車両が減速を伴いながら先行車に接近しているか否かを判定する。例えば、自車検出センサ2によって得られた自車両の減速度が閾値算出部46にて記憶または算出された閾値以上であるか否かを判定することで、自車両が減速を伴いながら先行車に接近しているか否かを判定する。自車両が減速を伴わずに先行車に接近していると判定された場合には、警報発生部5に警報を発するための信号を送る。
【0034】
閾値算出部46は、TTC判定部42で用いられる第一の閾値および第二の閾値、先行車車線変更判定部43で用いられる閾値、追越し判定部44で用いられる閾値および減速判定部45で用いられる閾値を記憶または算出する。閾値は、予め記憶されていても良いし、自車検出センサ2および先行車検出センサ3によって取得された自車情報および先行車情報に基づいて算出されても良い。
【0035】
ECU4に設けられるTTC算出部41、TTC判定部42、先行車車線変更判定部43、追越し判定部44、減速判定部45および閾値算出部46は、コンピュータにプログラムを導入することで構成してもよいし、個々のハードウェアによって構成してもよい。
【0036】
図4に示すように、ECU4には、警報発生部5が接続されている。警報発生部5は、ECU4からの信号を受けて警報を発する部分である。この警報発生部5は、例えば、運転者の視覚、聴覚または触覚を通じて警報を行うものが用いられる。具体的には、運転者の視覚を通じて行うものとしてモニタが用いられる。また、運転者の聴覚を通じて行うものとしてスピーカやブザーが用いられる。さらに、運転者の触覚を通じて行うものとしてバイブレータが用いられる。
【0037】
次に、本実施形態に係る追突警報装置1の動作及び本実施形態に係る追突警報方法について説明する。
【0038】
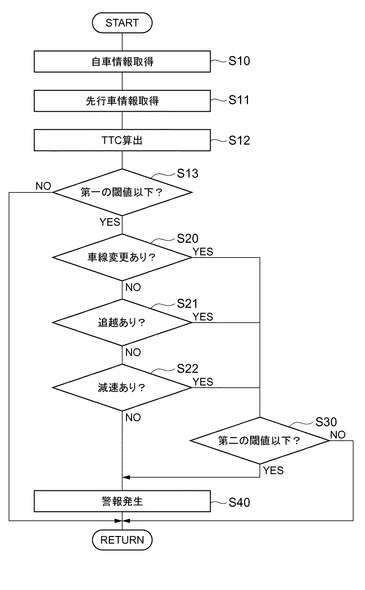
図5は、本実施形態に係る車両制御装置1の動作及び本実施形態に係る追突警報方法を示すフローチャートである。この図5の制御処理は、例えばECU4によって所定の周期で繰り返して実行される。
【0039】
車両制御装置1の動作は、まず、図5のS10に示すように、自車情報取得処理が行われる。自車情報取得処理は、自車両の車速情報、操舵角情報、現ギア段情報、車両傾き情報、加速情報および減速情報などを取得する処理であり、例えば自車検出センサ2の出力信号に基づいて行われる。この自車情報取得処理により、現在の自車の車速、操舵角、ギア段、車両の傾き、加速度および減速度などを特定することができる。
【0040】
そして、S11に移行し、先行車情報取得処理が行われる。先行車情報取得処理は、先行車の相対距離情報、相対速度情報、相対横位置情報、車幅情報を取得する処理であり、例えば周辺状況取得部3の出力信号に基づいて行われる。この先行車情報取得処理により、先行車の相対位置、相対速度、相対横位置、車幅などを特定することができる。
【0041】
そして、S12に移行し、TTC算出処理が行われる。TTC算出処理は、自車両と先行車との間の衝突余裕時間を算出する処理であって、自車検出センサ2、先行車検出センサ3によって取得された自車情報および先行車情報に基づいて算出される。TTC算出処理はECU4によって実行される。算出されるTTCは、いかなるように算出されたものであっても良い。例えば、自車両と先行車との間の相対距離および相対速度に基づいて算出されたものであっても良いし、さらに相対加速度を加味して算出されたものであっても良い。
【0042】
そして、S13に移行し、TTC第一判定処理が行われる。TTC第一判定処理は、S12にて算出されたTTCが、ECU4によって記憶または算出された第一の閾値以下であるか否かを判定する処理であり、ECU4によって実行される。
【0043】
S13にて、ECU4によって、TTCが第一の閾値以下でないと判定された場合、衝突の危険性が低いため警報を発することなく一連の制御処理は終了する。
【0044】
一方、S13にて、ECU4によって、TTCが第一の閾値以下であると判定された場合、S20に移行し、先行車車線変更判定処理(走行状況判定ステップ,先行車車線変更判定ステップ)が行われる。先行車車線変更判定処理は、先行車が自車両と同じ車線から隣の車線に車線変更を行っているか否かを判定する処理であり、自車検出センサ2および先行車検出センサ3によって取得された自車情報および先行車情報とECU4によって記憶または算出された閾値に基づいて判定される。先行車車線変更判定処理は、ECU4によって実行される。
【0045】
ここで、図1は、先行車7が車線変更をしている状況の例を示す図である。まず、自車両6の車幅および自車両6と先行車7との車幅方向の重なり量Wから自車両6と先行車7が車幅方向に重なっている割合を表すラップ率を求め、ラップ率が閾値以下であるか否かを判定する。図1に示すように、先行車7が隣の車線に車線変更を行っている場合、重なり量Wは小さいため、ラップ率は小さくなる。しかし、ラップ率が低いだけでは先行車7が本当に隣の車線に車線変更を行っているかどうか断定はできない。例えば、先行車7が隣の車線から自車両6と同じ車線に車線変更をしてくる状況の初期段階においてもラップ率は低い。このような状況では、自車両6と先行車7の衝突の危険性は高くなる。
【0046】
そこで、次に、自車両6の加速度が閾値以上であるか否かを判定する。図1に示すように、隣の車線に車線変更している先行車7を自車両6が追抜く場合、通常自車両6は加速しながら先行車7を追抜くため、自車両6の加速度は大きくなる。よって、ラップ率と自車両6の加速度の二つのパラメータに基づいて判定することによって正確な判定が可能となる。よって、ECU4は、ラップ率が閾値以下であり、さらに自車両6の加速度が閾値以上である場合には、隣の車線に車線変更を行っている先行車7を自車両6が追い抜こうとしている状況と判定する。このような状況では、自車両6の運転者は先行車7を追抜くために意識的に先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0047】
S20にて、ECU4によって、先行車が車線変更を行っていないと判定された場合、S21に移行し、追越し判定処理(走行状況判定ステップ)が行われる。追越し判定処理は、自車両が先行車の追越しを行っているか否かを判定する処理であり、自車検出センサ2によって取得された自車両の操舵角がECU4によって記憶または算出された閾値以上であるか否かを判定することで行われる。追越し判定処理は、ECU4によって実行される。ここで、図2は、自車両6が先行車7の追越しをしている状況の例を示す図である。図2に示すように、自車両6と同じ車線を走行している先行車7を自車両が追越す場合、自車両6はハンドルを切って隣の車線に変更し先行車7を追越していくため自車両6の操舵角は大きくなる。よって、ECU4は、自車両6の操舵角が閾値以上である場合には、自車両6と同じ車線を走行している先行車7を自車両6が追越そうとしている状況と判断する。このような状況では、自車両6の運転者は先行車7を追越すために意識的に先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0048】
S21にて、ECU4によって、自車両が先行車の追越しを行っていないと判定された場合、S22に移行し、減速判定処理(走行状況判定ステップ)が行われる。減速判定処理は、自車両が減速を伴って先行車に接近しているか否かを判定する処理であり、自車検出センサ2によって取得された減速度がECU4によって記憶または算出された閾値以上であるか否かを判定することで行われる。減速判定処理はECU4によって実行される。ここで、図3は、自車両6が減速を伴いながら先行車7に接近している状況の例を示す図である。図3に示すように、自車両6が坂道を走行しながら先行車7に接近する場合、自車両6は重力加速度による減速を伴うため減速度が大きくなる。また、自車両の運転者が先行車の存在を認識しながら自車両が先行車に接近する場合(図示しない)、自車両はフットブレーキやハンドブレーキによる減速を伴いながら先行車に接近するためこの場合も減速度は大きくなる。よって、ECU4は、減速度が閾値以上である場合には、自車両6が減速を伴いながら先行車7に接近している状況と判断する。このような状況では、自車両6の運転者は、自車両6が重力加速度等により減速されていることを認識しながら先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0049】
S22にて、ECU4によって、自車両が減速を伴わずに先行車に接近していると判定された場合、S40に移行し、警報発生処理が行われる。警報発生処理は、ECU4からの信号に基づいて警報発生部5から警報を発するための処理である。
【0050】
一方、S20にてECU4によって先行車が車線変更を行っていると判定された場合、S21にてECU4によって自車両が先行車の追越しを行っていると判定された場合、または、S22にてECU4によって自車両が減速を伴いながら先行車に接近していると判定された場合、S30に移行し、TTC第二判定処理(タイミング調節ステップ)が行われる。TTC第二判定処理は、警報発生部5から発せられる警報を出すタイミングを調節するための処理であり、ECU4によって実行される。具体的には、S12にて算出されたTTCが、ECU4によって記憶または算出された第二の閾値以下であるか否かを判定する。第二の閾値は、先行車が車線変更を行っている等の衝突の危険性が低い走行状況下にあるなかで警報を発するか否かを判定するための判定基準である。よって、第二の閾値は、通常の走行状況に適用される第一の閾値よりも小さい値が設定される。
【0051】
S30にて、ECU4によって、TTCが第二の閾値以下でないと判定された場合、自車両が先行車に接近しているものの衝突の危険性は低い状況であるため、警報を発することなく一連の制御処理は終了する。
【0052】
一方、S30にて、ECU4によって、TTCが第二の閾値以下であると判定された場合、S40に移行し、警報発生処理が行われる。このように、先行車車線変更判定S20により先行車が車線変更を行っていると判定された場合、追越し判定S21により自車両が先行車の追越しを行っていると判定された場合、または、減速判定S22により自車両が減速を伴いながら先行車に接近していると判定された場合には、TTC第二判定S30を通じて警報を発するタイミングが調節されることで、従来の警報発生装置に比べ警報を発するタイミングが遅らせられる。そして、S40の処理を終えたら、一連の制御処理を終了する。
【0053】
以上のように、本実施形態に係る追突警報装置1によれば、先行車が車線変更を行っていると判定された場合、自車両が先行車の追越しを行っていると判定された場合、または、自車両が減速を伴いながら先行車に接近していると判定された場合に警報を発するタイミングを調整することで、運転者の不快感が和らげられる。
【0054】
なお、上述した本実施形態は、本発明に係る追突警報装置の一例を示したものである。このため、本発明に係る追突警報装置は、このようなものに限られるものではなく、各請求項に記載した要旨を変更しないように実施形態に係る追突警報装置を変形し、または他のものに適用したものであってもよい。
【0055】
例えば、上述した本実施形態においては、衝突余裕判定手段であるECU4は、自車両と先行車の衝突余裕時間が閾値以下であるか否かを判定するものであるが、自車両と先行車の相対距離が閾値以下であるか否かを判定するものであっても良い。また、例えば、上述した本実施形態においては、追突警報装置1の動作は、先行車車線変更判定処理、追越し判定処理、減速判定処理の順に実行されるがこの順が入れ替えられて実行されても良いし、三つの判定処理のうち一部を省略して先行車車線変更判定処理のみが実行されても良いし、先行車車線変更判定処理および追越し判定処理のみが実行されても良いし、先行車車線変更判定処理および減速判定処理のみが実行されても良い。
【符号の説明】
【0056】
1…追突警報装置、2…自車検出センサ、3…先行車検出センサ、4…ECU、5…警報発生部、6…自車両、7…先行車、41…TTC算出部、42…TTC判定部、43…先行車車線変更判定部、44…追越し判定部、45…減速判定部、46…閾値算出部、S20…先行車車線変更判定処理(走行状況判定ステップ,先行車車線変更判定ステップ)、S21…追越し判定処理(走行状況判定ステップ)、S22…減速判定処理(走行状況判定ステップ)、S30…TTC第二判定処理(タイミング調節ステップ)、W…重なり量。
【技術分野】
【0001】
本発明は、自車両と先行車の衝突を防止するための警報を発する追突警報装置および追突警報方法に関するものである。
【背景技術】
【0002】
従来、自車両と先行車の衝突を防止するための警報を発する車両用警報装置として、例えば特開平5-162596号公報に示されているように、ブレーキ操作時における車間距離と平常運転時における車間距離の平均値および標準偏差から運転者の意識レベルを評価し、この評価結果に応じて警報を発するタイミングを調整する装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5-162596号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような車両用警報装置においては、自車両の走行状況(例えば、通常の走行状況、先行車が車線変更をしている状況、自車両が先行車を追越している状況等)にかかわらず警報を発するか否かの判断基準が一定であった。そのため、走行状況によっては衝突の危険性が低いにもかかわらず不要な警報が発せられる場合があり、運転者の不快感が増してしまうという問題があった。
【0005】
そこで本発明は、このような技術課題を解決するためになされたものであって、自車両と先行車の衝突を防止するための警報を発する際に、自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
すなわち、本発明にかかる追突警報装置は、自車両と障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定手段と、前記走行状況判定手段により前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に前記警報発生手段が発する警報のタイミングを調節するタイミング調節手段とを備える。
【0007】
この発明によれば、走行状況判定手段により自車両と障害物の関係が一定条件を満たすため自車両が警報の不要な走行状況にあると判定された場合に警報発生手段が発する警報のタイミングが調整される。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0008】
また、本発明にかかる追突警報装置は、自車両と先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段と、前記先行車車線変更判定手段により前記先行車が車線変更を行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせるタイミング調節手段とを備えるものであってもよい。
【0009】
この発明によれば、先行車車線変更判定手段により先行車が車線変更を行っていると判定された場合に警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0010】
また、本発明にかかる追突警報装置において、前記先行車車線変更判定手段は、前記自車両と前記先行車が車幅方向に重っている割合を表すラップ率および前記自車両の加速度に基づいて判定を行うことが好適である。
【0011】
この場合には、ラップ率および自車両の加速度の二種類のパラメータに基づいて先行車が車線変更を行っているか否かが判定されるため、正確な判定が可能となる。
【0012】
また、本発明にかかる追突警報装置において、前記追突警報装置は、前記自車両の操舵角が閾値以上になったか否かで前記自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段を備え、前記タイミング調節手段は、前記追越し判定手段により前記自車両が前記先行車の追越しを行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせることが好ましい。
【0013】
この場合には、先行車が車線変更を行っている状況と判定された場合のみならず、追越し判定手段により自車両が先行車の追越しを行っていると判定された場合にも警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感がさらに和らげられる。
【0014】
また、本発明にかかる追突警報装置において、前記追突警報装置は、前記自車両の減速度が閾値以上になったか否かで前記自車両が減速を伴いながら前記先行車に接近しているか否かを判定する減速判定手段を備え、前記タイミング調節手段は、前記減速判定手段により前記自車両が減速を伴いながら前記先行車に接近していると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせることが好ましい。
【0015】
この場合には、先行車が車線変更を行っている状況と判定された場合および自車両が先行車の追越しを行っている状況と判定された場合に加え、減速判定手段により自車両が減速を伴いながら先行車に接近していると判定された場合にも警報発生手段が発する警報のタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が一層和らげられる。
【0016】
また、本発明にかかる追突警報方法は、障害物に対して警報を発する追突警報方法であって、自車両と障害物との相対距離が閾値以下になった場合、または、自車両と障害物の衝突余裕時間が閾値以下になった場合に、自車両と障害物の関係が一定条件を満たすか否かを判定する走行状況判定ステップと、走行状況判定ステップで自車両と障害物の関係が一定条件を満たすと判定された場合に、警報が発せられるタイミングを調節するタイミング調節ステップとを有する。
【0017】
この発明によれば、走行状況判定ステップで自車両と障害物の関係が一定条件を満たすため自車両が警報の不要な走行状況にあると判定された場合に警報が発せられるタイミングが調整される。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【0018】
また、本発明にかかる追突警報方法は、先行車に対して警報を発する追突警報方法であって、自車両と先行車との相対距離が閾値以下になった場合、または、自車両と先行車の衝突余裕時間が閾値以下になった場合に、先行車が車線変更を行っているか否かを判定する先行車車線変更判定ステップと、先行車車線変更判定ステップで先行車が車線変更を行っていると判定された場合に、警報が発せられるタイミングを遅らせるタイミング調節ステップとを有するものであっても良い。
【0019】
この発明によれば、先行車車線変更判定ステップで先行車が車線変更を行っていると判定された場合に警報が発せられるタイミングが遅らせられる。よって、不要な警報を減らせるため運転者の不快感が和らげられる。
【発明の効果】
【0020】
本発明によれば、自車両と先行車の衝突を防止するための警報を発する際に自車両の走行状況に応じて警報を発するタイミングを調整し、運転者の不快感を和らげる追突警報装置および追突警報方法を提供することが可能である。
【図面の簡単な説明】
【0021】
【図1】先行車が車線変更をしている状況の例を示す図である。
【図2】自車両が先行車の追越しをしている状況の例を示す図である。
【図3】自車両が減速を伴いながら先行車に接近している状況の例を示す図である。
【図4】本発明の実施形態に係る追突警報装置の構成概要図である。
【図5】図4の追突警報装置における動作及び本実施形態に係る追突警報方法を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照して本発明の実施形態について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0023】
図4は、本実施形態に係る追突警報装置1の構成概要図である。追突警報装置1は、車両に搭載されるものであり、自車両と障害物たる先行車の衝突を防止するための警報を発する装置である。本実施形態に係る追突警報方法は、追突警報装置1により実行される。図4に示すように、追突警報装置1は、自車検出センサ2、先行車検出センサ3、ECU(Electronic Control Unit)4および警報発生部5より構成されている。
【0024】
自車検出センサ2は、自車両の情報を検出するためのセンサである。自車検出センサ2としては、例えば、車輪速センサ、舵角センサ、ギア段センサ、重力加速度センサ、アクセルセンサおよびブレーキセンサなどが用いられる。これらを用いることで、それぞれ、車速情報、操舵角情報、現ギア段情報、車両傾き情報、加速情報および減速情報が検出される。
【0025】
先行車検出センサ3は、先行車の情報を検出するためのセンサである。先行車検出センサ3としては、例えば、カメラ、ミリ波レーダセンサおよびレーザレーダセンサなどが用いられる。カメラを用いることで、先行車の車幅や相対横位置が検出される。また、ミリ波レーダセンサなどを用いることにより、先行車の相対距離や相対速度が検出される。
【0026】
ECU4は、追突警報装置1の装置全体の制御を行うものであって、例えばCPU、ROM、RAMを含むコンピュータを主体として構成されている。ECU4は、自車検出センサ2および先行車検出センサ3と接続され、自車検出センサ2および先行車検出センサ3により検出した自車情報および先行車情報などを受信して記憶する。
【0027】
ECU4は、自車両と先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段として機能する。また、ECU4は、自車両と障害物たる先行車の関係が一定条件を満たすか否かを判定する走行状況判定手段としても機能し、具体的には、先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段、自車両の操舵角が閾値以上になったか否かで自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段、自車両の減速度が閾値以上になったか否かで自車両が減速を伴いながら先行車に接近しているか否かを判定する減速判定手段として機能する。また、ECU4は、先行車車線変更判定手段により先行車が車線変更を行っていると判定された場合、追越し判定手段により自車両が前記先行車の追越しを行っていると判定された場合、または、減速判定手段により自車両が減速を伴いながら先行車に接近していると判定された場合に、警報を出すタイミングを調節するタイミング調節手段としても機能する。
【0028】
ECU4は、TTC(Time to collision)算出部41、TTC判定部42、先行車車線変更判定部43、追越し判定部44、減速判定部45および閾値算出部46を備えている。
【0029】
TTC算出部41は、自車両と先行車との衝突余裕時間、すなわちTTCを算出するものであり、自車検出センサ2、先行車検出センサ3によって取得された自車情報および先行車情報に基づいてTTCを算出する。
【0030】
TTC判定部42は、TTC算出部41にて算出されたTTCが、閾値算出部46にて記憶または算出された第一の閾値以下であるか否かを判定する。また、TTC判定部42は、先行車車線変更判定部43によって先行車が車線変更を行っているとされた場合、追越し判定部44によって自車両が先行車の追越しを行っていると判定された場合、または、減速判定部45によって自車両が減速を伴いながら先行車に接近していると判定された場合に、警報発生部5から発せられる警報を出すタイミングを調節する。具体的には、TTC算出部41にて算出されたTTCが、閾値算出部46にて記憶または算出された第二の閾値以下であるか否かを判定し、TTCが第二の閾値以下であると判定された場合にのみ警報発生部5に警報を発するための信号を送ることで警報を出すタイミングを調節する。ここで、第二の閾値は、先行車が車線変更を行っている等の衝突の危険性が低い走行状況下にあるなかで警報を発するか否かを判定するための判定基準である。よって、第二の閾値は、通常の走行状況に適用される第一の閾値よりも小さい値が設定される。
【0031】
先行車車線変更判定部43は、先行車が車線変更を行っているか否かを判定する。例えば、自車検出センサ2および先行車検出センサ3によって得られた自車情報および先行車情報から自車両と先行車が車幅方向に重っている割合を表すラップ率および自車両の加速度を求め、これらの値と閾値算出部46にて記憶または算出された閾値に基づいて先行車が車線変更を行っているか否かを判定する。
【0032】
追越し判定部44は、自車両が先行車の追越しを行っているか否かを判定する。例えば、自車検出センサ2によって得られた自車両の操舵角が閾値算出部46にて記憶または算出された閾値以上であるか否かを判定することで、自車両が先行車の追越しを行っているか否かを判定する。
【0033】
減速判定部45は、自車両が減速を伴いながら先行車に接近しているか否かを判定する。例えば、自車検出センサ2によって得られた自車両の減速度が閾値算出部46にて記憶または算出された閾値以上であるか否かを判定することで、自車両が減速を伴いながら先行車に接近しているか否かを判定する。自車両が減速を伴わずに先行車に接近していると判定された場合には、警報発生部5に警報を発するための信号を送る。
【0034】
閾値算出部46は、TTC判定部42で用いられる第一の閾値および第二の閾値、先行車車線変更判定部43で用いられる閾値、追越し判定部44で用いられる閾値および減速判定部45で用いられる閾値を記憶または算出する。閾値は、予め記憶されていても良いし、自車検出センサ2および先行車検出センサ3によって取得された自車情報および先行車情報に基づいて算出されても良い。
【0035】
ECU4に設けられるTTC算出部41、TTC判定部42、先行車車線変更判定部43、追越し判定部44、減速判定部45および閾値算出部46は、コンピュータにプログラムを導入することで構成してもよいし、個々のハードウェアによって構成してもよい。
【0036】
図4に示すように、ECU4には、警報発生部5が接続されている。警報発生部5は、ECU4からの信号を受けて警報を発する部分である。この警報発生部5は、例えば、運転者の視覚、聴覚または触覚を通じて警報を行うものが用いられる。具体的には、運転者の視覚を通じて行うものとしてモニタが用いられる。また、運転者の聴覚を通じて行うものとしてスピーカやブザーが用いられる。さらに、運転者の触覚を通じて行うものとしてバイブレータが用いられる。
【0037】
次に、本実施形態に係る追突警報装置1の動作及び本実施形態に係る追突警報方法について説明する。
【0038】
図5は、本実施形態に係る車両制御装置1の動作及び本実施形態に係る追突警報方法を示すフローチャートである。この図5の制御処理は、例えばECU4によって所定の周期で繰り返して実行される。
【0039】
車両制御装置1の動作は、まず、図5のS10に示すように、自車情報取得処理が行われる。自車情報取得処理は、自車両の車速情報、操舵角情報、現ギア段情報、車両傾き情報、加速情報および減速情報などを取得する処理であり、例えば自車検出センサ2の出力信号に基づいて行われる。この自車情報取得処理により、現在の自車の車速、操舵角、ギア段、車両の傾き、加速度および減速度などを特定することができる。
【0040】
そして、S11に移行し、先行車情報取得処理が行われる。先行車情報取得処理は、先行車の相対距離情報、相対速度情報、相対横位置情報、車幅情報を取得する処理であり、例えば周辺状況取得部3の出力信号に基づいて行われる。この先行車情報取得処理により、先行車の相対位置、相対速度、相対横位置、車幅などを特定することができる。
【0041】
そして、S12に移行し、TTC算出処理が行われる。TTC算出処理は、自車両と先行車との間の衝突余裕時間を算出する処理であって、自車検出センサ2、先行車検出センサ3によって取得された自車情報および先行車情報に基づいて算出される。TTC算出処理はECU4によって実行される。算出されるTTCは、いかなるように算出されたものであっても良い。例えば、自車両と先行車との間の相対距離および相対速度に基づいて算出されたものであっても良いし、さらに相対加速度を加味して算出されたものであっても良い。
【0042】
そして、S13に移行し、TTC第一判定処理が行われる。TTC第一判定処理は、S12にて算出されたTTCが、ECU4によって記憶または算出された第一の閾値以下であるか否かを判定する処理であり、ECU4によって実行される。
【0043】
S13にて、ECU4によって、TTCが第一の閾値以下でないと判定された場合、衝突の危険性が低いため警報を発することなく一連の制御処理は終了する。
【0044】
一方、S13にて、ECU4によって、TTCが第一の閾値以下であると判定された場合、S20に移行し、先行車車線変更判定処理(走行状況判定ステップ,先行車車線変更判定ステップ)が行われる。先行車車線変更判定処理は、先行車が自車両と同じ車線から隣の車線に車線変更を行っているか否かを判定する処理であり、自車検出センサ2および先行車検出センサ3によって取得された自車情報および先行車情報とECU4によって記憶または算出された閾値に基づいて判定される。先行車車線変更判定処理は、ECU4によって実行される。
【0045】
ここで、図1は、先行車7が車線変更をしている状況の例を示す図である。まず、自車両6の車幅および自車両6と先行車7との車幅方向の重なり量Wから自車両6と先行車7が車幅方向に重なっている割合を表すラップ率を求め、ラップ率が閾値以下であるか否かを判定する。図1に示すように、先行車7が隣の車線に車線変更を行っている場合、重なり量Wは小さいため、ラップ率は小さくなる。しかし、ラップ率が低いだけでは先行車7が本当に隣の車線に車線変更を行っているかどうか断定はできない。例えば、先行車7が隣の車線から自車両6と同じ車線に車線変更をしてくる状況の初期段階においてもラップ率は低い。このような状況では、自車両6と先行車7の衝突の危険性は高くなる。
【0046】
そこで、次に、自車両6の加速度が閾値以上であるか否かを判定する。図1に示すように、隣の車線に車線変更している先行車7を自車両6が追抜く場合、通常自車両6は加速しながら先行車7を追抜くため、自車両6の加速度は大きくなる。よって、ラップ率と自車両6の加速度の二つのパラメータに基づいて判定することによって正確な判定が可能となる。よって、ECU4は、ラップ率が閾値以下であり、さらに自車両6の加速度が閾値以上である場合には、隣の車線に車線変更を行っている先行車7を自車両6が追い抜こうとしている状況と判定する。このような状況では、自車両6の運転者は先行車7を追抜くために意識的に先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0047】
S20にて、ECU4によって、先行車が車線変更を行っていないと判定された場合、S21に移行し、追越し判定処理(走行状況判定ステップ)が行われる。追越し判定処理は、自車両が先行車の追越しを行っているか否かを判定する処理であり、自車検出センサ2によって取得された自車両の操舵角がECU4によって記憶または算出された閾値以上であるか否かを判定することで行われる。追越し判定処理は、ECU4によって実行される。ここで、図2は、自車両6が先行車7の追越しをしている状況の例を示す図である。図2に示すように、自車両6と同じ車線を走行している先行車7を自車両が追越す場合、自車両6はハンドルを切って隣の車線に変更し先行車7を追越していくため自車両6の操舵角は大きくなる。よって、ECU4は、自車両6の操舵角が閾値以上である場合には、自車両6と同じ車線を走行している先行車7を自車両6が追越そうとしている状況と判断する。このような状況では、自車両6の運転者は先行車7を追越すために意識的に先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0048】
S21にて、ECU4によって、自車両が先行車の追越しを行っていないと判定された場合、S22に移行し、減速判定処理(走行状況判定ステップ)が行われる。減速判定処理は、自車両が減速を伴って先行車に接近しているか否かを判定する処理であり、自車検出センサ2によって取得された減速度がECU4によって記憶または算出された閾値以上であるか否かを判定することで行われる。減速判定処理はECU4によって実行される。ここで、図3は、自車両6が減速を伴いながら先行車7に接近している状況の例を示す図である。図3に示すように、自車両6が坂道を走行しながら先行車7に接近する場合、自車両6は重力加速度による減速を伴うため減速度が大きくなる。また、自車両の運転者が先行車の存在を認識しながら自車両が先行車に接近する場合(図示しない)、自車両はフットブレーキやハンドブレーキによる減速を伴いながら先行車に接近するためこの場合も減速度は大きくなる。よって、ECU4は、減速度が閾値以上である場合には、自車両6が減速を伴いながら先行車7に接近している状況と判断する。このような状況では、自車両6の運転者は、自車両6が重力加速度等により減速されていることを認識しながら先行車7に接近しているため、通常の運転時に先行車7に接近している場合よりも衝突の危険性は低い。
【0049】
S22にて、ECU4によって、自車両が減速を伴わずに先行車に接近していると判定された場合、S40に移行し、警報発生処理が行われる。警報発生処理は、ECU4からの信号に基づいて警報発生部5から警報を発するための処理である。
【0050】
一方、S20にてECU4によって先行車が車線変更を行っていると判定された場合、S21にてECU4によって自車両が先行車の追越しを行っていると判定された場合、または、S22にてECU4によって自車両が減速を伴いながら先行車に接近していると判定された場合、S30に移行し、TTC第二判定処理(タイミング調節ステップ)が行われる。TTC第二判定処理は、警報発生部5から発せられる警報を出すタイミングを調節するための処理であり、ECU4によって実行される。具体的には、S12にて算出されたTTCが、ECU4によって記憶または算出された第二の閾値以下であるか否かを判定する。第二の閾値は、先行車が車線変更を行っている等の衝突の危険性が低い走行状況下にあるなかで警報を発するか否かを判定するための判定基準である。よって、第二の閾値は、通常の走行状況に適用される第一の閾値よりも小さい値が設定される。
【0051】
S30にて、ECU4によって、TTCが第二の閾値以下でないと判定された場合、自車両が先行車に接近しているものの衝突の危険性は低い状況であるため、警報を発することなく一連の制御処理は終了する。
【0052】
一方、S30にて、ECU4によって、TTCが第二の閾値以下であると判定された場合、S40に移行し、警報発生処理が行われる。このように、先行車車線変更判定S20により先行車が車線変更を行っていると判定された場合、追越し判定S21により自車両が先行車の追越しを行っていると判定された場合、または、減速判定S22により自車両が減速を伴いながら先行車に接近していると判定された場合には、TTC第二判定S30を通じて警報を発するタイミングが調節されることで、従来の警報発生装置に比べ警報を発するタイミングが遅らせられる。そして、S40の処理を終えたら、一連の制御処理を終了する。
【0053】
以上のように、本実施形態に係る追突警報装置1によれば、先行車が車線変更を行っていると判定された場合、自車両が先行車の追越しを行っていると判定された場合、または、自車両が減速を伴いながら先行車に接近していると判定された場合に警報を発するタイミングを調整することで、運転者の不快感が和らげられる。
【0054】
なお、上述した本実施形態は、本発明に係る追突警報装置の一例を示したものである。このため、本発明に係る追突警報装置は、このようなものに限られるものではなく、各請求項に記載した要旨を変更しないように実施形態に係る追突警報装置を変形し、または他のものに適用したものであってもよい。
【0055】
例えば、上述した本実施形態においては、衝突余裕判定手段であるECU4は、自車両と先行車の衝突余裕時間が閾値以下であるか否かを判定するものであるが、自車両と先行車の相対距離が閾値以下であるか否かを判定するものであっても良い。また、例えば、上述した本実施形態においては、追突警報装置1の動作は、先行車車線変更判定処理、追越し判定処理、減速判定処理の順に実行されるがこの順が入れ替えられて実行されても良いし、三つの判定処理のうち一部を省略して先行車車線変更判定処理のみが実行されても良いし、先行車車線変更判定処理および追越し判定処理のみが実行されても良いし、先行車車線変更判定処理および減速判定処理のみが実行されても良い。
【符号の説明】
【0056】
1…追突警報装置、2…自車検出センサ、3…先行車検出センサ、4…ECU、5…警報発生部、6…自車両、7…先行車、41…TTC算出部、42…TTC判定部、43…先行車車線変更判定部、44…追越し判定部、45…減速判定部、46…閾値算出部、S20…先行車車線変更判定処理(走行状況判定ステップ,先行車車線変更判定ステップ)、S21…追越し判定処理(走行状況判定ステップ)、S22…減速判定処理(走行状況判定ステップ)、S30…TTC第二判定処理(タイミング調節ステップ)、W…重なり量。
【特許請求の範囲】
【請求項1】
自車両と障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、
前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定手段と、
前記走行状況判定手段により前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に前記警報発生手段が発する警報のタイミングを調節するタイミング調節手段と、
を備えた追突警報装置。
【請求項2】
自車両と先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、
前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段と、
前記先行車車線変更判定手段により前記先行車が車線変更を行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせるタイミング調節手段と、
を備えた追突警報装置。
【請求項3】
前記先行車車線変更判定手段は、前記自車両と前記先行車が車幅方向に重っている割合を表すラップ率および前記自車両の加速度に基づいて判定を行う、
請求項2に記載の追突警報装置。
【請求項4】
前記自車両の操舵角が閾値以上になったか否かで前記自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段を備え、
前記タイミング調節手段は、前記追越し判定手段により前記自車両が前記先行車の追越しを行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせる、
請求項2または請求項3に記載の追突警報装置。
【請求項5】
前記自車両の減速度が閾値以上になったか否かで前記自車両が減速を伴いながら前記先行車に接近しているか否かを判定する減速判定手段を備え、
前記タイミング調節手段は、前記減速判定手段により前記自車両が減速を伴いながら前記先行車に接近していると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせる、
請求項2から請求項4のいずれか一項に記載の追突警報装置。
【請求項6】
障害物に対して警報を発する追突警報方法であって、
自車両と前記障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に、前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定ステップと、
前記走行状況判定ステップで前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に、前記警報が発せられるタイミングを調節するタイミング調節ステップと、
を有する追突警報方法。
【請求項7】
先行車に対して警報を発する追突警報方法であって、
自車両と前記先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に、前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定ステップと、
前記先行車車線変更判定ステップで前記先行車が車線変更を行っていると判定された場合に、前記警報が発せられるタイミングを遅らせるタイミング調節ステップと、
を有する追突警報方法。
【請求項1】
自車両と障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、
前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定手段と、
前記走行状況判定手段により前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に前記警報発生手段が発する警報のタイミングを調節するタイミング調節手段と、
を備えた追突警報装置。
【請求項2】
自車両と先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に警報を発する警報発生手段と、
前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定手段と、
前記先行車車線変更判定手段により前記先行車が車線変更を行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせるタイミング調節手段と、
を備えた追突警報装置。
【請求項3】
前記先行車車線変更判定手段は、前記自車両と前記先行車が車幅方向に重っている割合を表すラップ率および前記自車両の加速度に基づいて判定を行う、
請求項2に記載の追突警報装置。
【請求項4】
前記自車両の操舵角が閾値以上になったか否かで前記自車両が前記先行車の追越しを行っているか否かを判定する追越し判定手段を備え、
前記タイミング調節手段は、前記追越し判定手段により前記自車両が前記先行車の追越しを行っていると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせる、
請求項2または請求項3に記載の追突警報装置。
【請求項5】
前記自車両の減速度が閾値以上になったか否かで前記自車両が減速を伴いながら前記先行車に接近しているか否かを判定する減速判定手段を備え、
前記タイミング調節手段は、前記減速判定手段により前記自車両が減速を伴いながら前記先行車に接近していると判定された場合に前記警報発生手段が発する警報のタイミングを遅らせる、
請求項2から請求項4のいずれか一項に記載の追突警報装置。
【請求項6】
障害物に対して警報を発する追突警報方法であって、
自車両と前記障害物との相対距離が閾値以下になった場合、または、前記自車両と前記障害物の衝突余裕時間が閾値以下になった場合に、前記自車両と前記障害物の関係が一定条件を満たすか否かを判定する走行状況判定ステップと、
前記走行状況判定ステップで前記自車両と前記障害物の関係が一定条件を満たすと判定された場合に、前記警報が発せられるタイミングを調節するタイミング調節ステップと、
を有する追突警報方法。
【請求項7】
先行車に対して警報を発する追突警報方法であって、
自車両と前記先行車との相対距離が閾値以下になった場合、または、前記自車両と前記先行車の衝突余裕時間が閾値以下になった場合に、前記先行車が車線変更を行っているか否かを判定する先行車車線変更判定ステップと、
前記先行車車線変更判定ステップで前記先行車が車線変更を行っていると判定された場合に、前記警報が発せられるタイミングを遅らせるタイミング調節ステップと、
を有する追突警報方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−197915(P2011−197915A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−62843(P2010−62843)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]