
追跡システムおよびそれに関連する方法
可動資産(16)を追跡する追跡システム(10)及びこのシステムを用いる方法。追跡システムは、監視装置(22)、追跡情報ネットワーク(20)、データ通信ネットワーク(18)、トラッカタグ(12)及び追跡情報サーバ(14)を含む。トラッカタグはGPS技術を用いる。追跡情報サーバは、メッセージングシステムを介してメッセージでトラッカタグへ、プログラムされた命令を与える。トラッカタグはメッセージングシステムからメッセージを取り出す。追跡情報サーバは、追跡情報及び関連情報を加入者へ提供する。一例では、トラッカタグはイリジウム衛星コンステレーション(28)と通信し、追跡情報は、資産が実質的に世界の何れにかにあれば加入者に表示される。別の例では、監視装置はイリジウム衛星コンステレーションと通信し、追跡情報は、加入者が実質的に世界の何れかにいれば、好適にはインターネット(36)を介して加入者に表示される。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2003年5月6日に出願されたPCT特許出願第PCT/US03/14483号の利益を主張するものであり、その開示を参照により本明細書に組み込む。更に、本出願は、PCT特許出願第PCT/US03/14483号の一部継続出願である。PCT特許出願第PCT/US03/14483号は、2002年5月7日出願の米国特許仮出願第60/378,283号の利益を主張するものである。
【0002】
本発明は、可動の資産を追跡するシステム、およびそのシステムを用いる方法に関する。本発明は、グローバル・ポジショニング・システム技術を用いて動作する追跡装置と、追跡情報を様々なタイプの補足的情報とともに加入者へ提供する追跡情報サーバとに関連する特定の用途を見い出し、特にそれを参照して本発明を説明する。しかしながら、本発明は他の用途、例えば、資産と関連する或る環境特性および動作特性の監視や、資産の或る動作の制御などのような用途に従うこともできることを、理解されたい。
【背景技術】
【0003】
旅客機および一部の一般航空機にトランスポンダおよび/またはブラック・ボックスを備えることは一般的である。トランスポンダおよび/またはブラック・ボックスは、航空機の位置および/または航空機内で行われる行動を記録する。こうしたシステムは、航空機の飛行および操作の情報を取得するには有用であるが、現在実施されている技術には欠点がある。こうした欠点には、地上走行および離陸から、飛行中の飛行パターン、そして着陸までの段階を含む飛行パターンの様々な段階にある航空機との間の対話のレベルが相対的に低いことなどがある。更にこうしたシステムは、通常、旅客機または航空機の電子インフラストラクチャに制御され、相互接続されている。こうした設計は、例えば侵入者が航空機を無認可で制御する場合などに、これらのシステムが無効になる可能性をもたらす。航空機および他の対象物の追跡に関連する一部の米国特許を以下に示す。
【0004】
モンロー(Monroe)の米国特許第6,545,601号は、地上の航空機用のセキュリティ/監視システムを開示し、このシステムは、航空機などのような商用の輸送機関の内部および外部の双方の重要な構成要素および重要なエリアを監視するための、ビデオ画像生成器、音声センサ、動作検知器、および火災/煙検出器を含む、戦略的に間隔をあけて配置した複数のセンサを組み込んである。捕捉されたデータおよび画像は地上のセキュリティ・ステーション(security station)へ送信され、モニタに表示され、また、「ブラック・ボックス」レコーダおよび地上の記録システムに記録される場合もある。複数の音声信号および画像信号は、画像の処理に必要な記録用および監視用のハードウェアを最低限に抑えるために、多重化され、分割スクリーン技術を用いて順序付けされる。
【0005】
ドイル(Doyle)の米国特許第6,519,529号は、カーゴ・トレーラの共同一慣輸送状態を追跡および監視するシステムを開示している。このシステムは、グローバル・ポジショニング・システム(GPS)・ユニットによって提供される情報に加えて、トレーラ上の様々なセンサの状態を監視する。GPSユニットは、トレーラの位置および速度を提供する。ホイール監視ユニットは、特に、ホイールの回転があるかどうかなどのような、トレーラのホイールの状況を提供する。アンチロック・ブレーキ・システムは、ホイール回転状況を示す信号情報を提供するために用いられる。また、独立したホイール回転センサもホイール回転状況を提供するために用いられる。コンピュータ・プロセッサは、ホイール回転状況、位置情報および速度情報を用いて、トレーラの共同一貫輸送の移動状況を決定する。
【0006】
キュラトロ(Curatolo)その他の米国特許第6,510,380は、近接して通信する少なくとも2つのシグナリング・ユニットと、シグナリング・ユニットの位置を識別する手段とを備えるセキュリティおよび追跡装置を開示している。一実施形態では、近接して通信する少なくとも2つのシグナリング・ユニットと、シグナリング・ユニットが事前に選択された距離を超える距離だけ離れたときにシグナリング・ユニットの位置を識別して自動的に送信する手段とを備えるセキュリティ及び追跡装置が提供される。好ましい実施形態では、人間、動物または有形資産の場所を突き止めるための方法が提供され、その方法は、人間、動物、または有形資産と接する、近接して通信する少なくとも2つのシグナリング・ユニットを提供するステップを備え、少なくとも1つのシグナリング・ユニットは小さくて隠されており、人間、動物、または有形資産にしっかりと取り付けられ、これらのシグナリング・ユニットは、監視ステーションに対してシグナリング・ユニットの位置を特定する手段を有する。この方法は更に、GPSシステムを参照することによってシグナリング・ユニットの位置を識別する手段を稼働させるステップと、監視ステーションへ前記の地理的位置を通知するステップとを含む。
【0007】
ドナー(Doner)の米国特許第6,490,523号は、機関車を管理する方法および装置を開示している。装置は、機関車インターフェイス、コンピュータ、GPS受信機、および発信器を含むオンボードの追跡システムを含み、コンピュータは、機関車の位置を決定して、その位置を発信器を介して送信するようプログラムされており、コンピュータは更に、機関車の計測値を取得して、それらを発信器を介して送信するようにプログラムされている。方法は、それぞれの機関車が機関車指定点から出発したときを判定するように、それぞれのオンボードのシステムを動作させるステップと、出発状態を判定し、機関車指定点に対応する時点で機関車位置メッセージをデータ・センタへ送信し、それぞれの機関車ごとにGPS位置データを同時に収集するようにオンボードのシステムを動作させるステップと、データ・センタで、機関車指定点に対応する機関車位置メッセージを収集して、機関車のローカル化したグループを決定するステップと、列車の代表的構成および先頭の機関車を識別するステップとを含む。
【0008】
ベーカー(Baker)の米国特許第6,339,397号は、取り付け板に取り付けられ.エンクロージャを含むポータブルの自蔵型追跡ユニットを開示し、中空の内部空洞が、GPS受信機、マイクロプロセッサ、および送信機を収納する。GPS受信機は追跡データを受信し、マイクロプロセッサは追跡データを処理してデータ・パケットにする。送信機は、データ・パケットを、中央データベースに送信するために、リモート受信局へ送信する。光電池は、追跡ユニットの電気構成要素へ電力を提供するバッテリを充電するために、エンクロージャ上に搭載されている。エンクロージャは、概して直交に配向された一対の垂直に配向された側板で設計されており、それにより、側板に設けられているソーラー・パネルが、広範な配向を通じて好ましい太陽光入射角を維持するようにする。送信機は、アンテナを備えるセルラー電話であり、エンクロージャ内に取り付けられるが、送信機の動作周波数の約4分の1の波長だけ、金属取り付け板および電気構成要素から離れて配置される。エンクロージャは、無線周波数および光の透過性の材料から構成され、それによって、アンテナおよびソーラー・パネルを、エンクロージャの中空の内部空洞内に収納することができる。この発明の方法では、追跡データは、セルラー電話を介してセルラー・サービス・プロバイダへ定期的に送信され、更に、データ・サービス・ビューロへ送信され、このデータ・サービス・ビューロは、インターネットを介して中央サーバ・コンピュータのデータベースへデータを送信する。中央サーバ・コンピュータは、情報をデコードし、インターネット上のウェブ・ページを介して顧客に対して、マップおよびレポートなどのようなインターフェイスおよび付加価値製品を提供する。
【0009】
現在、それぞれの一般航空機(米国内では約40万)は、現在所定の位置にあるトランスポンダ測位システムに自発的に遵守するよう要求されている。一般の航空機の3分の1が遵守しているにすぎない。他の3分の2は、トランスポンダを備えていないか、または他の理由により遵守していない。
【発明の開示】
【発明が解決しようとする課題】
【0010】
既存の技術の見直すと、例えば、飛行パターン中の航空機と地上局との間のインテリジェンスで対話型のサービス通信を向上させる追跡システムを作成すること、および、航空機と地上局との間の通信における独立性を保証することが望まれる。例えば航空機のアイドル時間、地上走行、および飛行中の任意のときに、一意の航空機番号で航空機を追跡する、信頼性が高く費用対効果が大きい方法を提供することが望まれる。また、上記のタイプの対話型サービス通信および独立した通信を、他の様式の交通、例えば、種々の形式の空路、地上、水路の運送などにも提供することが望ましいと思われる。
【課題を解決するための手段】
【0011】
一態様では、可動の資産を追跡し、追跡情報を監視装置へ提供するための装置が提供される。一実施形態では、装置は、グローバル・ポジショニング・システム衛星コンステレーションの複数のグローバル・ポジショニング・システム衛星から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグを含み、位置データは、受信したデータの発信元の各グローバル・ポジショニング・システム衛星の地球の中心に対する位置を表し、時間データは、位置データに関連する時刻を表し、トラッカ・タグは、可動資産の外部に沿って位置データおよび時間データの受信を容易にする場所に配置され、トラッカ・タグは、複数のグローバル・ポジショニング・システム衛星からの位置データを組み合わせ、組み合わされた位置データと時間データとをデータ通信ネットワークを介して選択的に送信するものであり、トラッカ・タグは、コマンドおよび制御情報を伴うメッセージを前記データ通信ネットワークを介して選択的に取り出すように適合され、トラッカ・タグは、資産に関連する設備からは操作不能であり、かつ、装置は、トラッカ・タグのコマンドおよび制御のための追跡情報サーバを含み、追跡情報サーバは、コマンドおよび制御情報を伴うメッセージをトラッカ・タグへメッセージング・システムを介して選択的に送信するように適合され、メッセージはトラッカ・タグへ宛てられており、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、追跡情報サーバは、組み合わされた位置データおよび時間データを、トラッカ・タグからデータ通信ネットワークを介して受信するように適合され、追跡情報サーバは、コマンドおよび制御情報を監視装置から追跡情報ネットワークを介して選択的に受信するように適合され、追跡情報サーバは、組み合わされた位置データおよび時間データを、プログラムされた命令ならびにコマンドおよび制御情報に基づいて選択的に処理して追跡情報を作成するように適合され、追跡情報は、資産に関連付けられ、監視装置に追跡情報ネットワークを介して選択的にアクセス可能である。
【0012】
別の態様では、追跡システムが提供される。一実施形態では、追跡システムは、可動の資産に関連する追跡情報を表示するための監視装置と、追跡情報を監視装置へ通信するために監視装置と通信する追跡情報ネットワークと、データ通信ネットワークと、グローバル・ポジショニング・システム衛星コンステレーションの複数のグローバル・ポジショニング・システム衛星から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグとを含み、位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球の中心に対する位置を表し、時間データは、位置データに関連する時刻を表し、トラッカ・タグは、可動の資産の外部に沿って位置データおよび時間データの受信を容易にする場所に配置され、トラッカ・タグは、複数のグローバル・ポジショニング・システム衛星からの位置データおよび時間データを組み合わせ、組み合わされた位置データおよび時間データをデータ通信ネットワークを介して選択的に送信するものであり、トラッカ・タグは、コマンドおよび制御情報をデータ通信ネットワークを介して選択的に取り出すものであり、かつ、装置は、トラッカ・タグのコマンドおよび制御のための追跡情報サーバを含み、追跡情報サーバは、コマンドおよび制御情報をトラッカ・タグへメッセージング・システムを介して選択的に送信し、メッセージはトラッカ・タグへ宛てられており、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、追跡情報サーバは、組み合わされた位置データおよび時間データを、トラッカ・タグからデータ通信ネットワークを介して受信し、追跡情報サーバは、コマンドおよび制御情報を監視装置から追跡情報ネットワークを介して選択的に受信し、追跡情報サーバは、組み合わされた位置データおよび時間データを選択的に処理して追跡情報を作成し、追跡情報は、監視装置にとって、追跡情報ネットワークを介して選択的にアクセス可能である。
【0013】
更に別の態様では、可動の資産に関連するセンサ・データの監視を追跡情報サーバと通信するトラッカ・タグを用いて行う方法が提供される。一実施形態では、方法は、a)トラッカ・タグを可動の資産に取り付けるステップを含み、トラッカ・タグは、可動の資産の外部に沿って、資産の通常の移動の間にトラッカ・タグの視線(見通し線)が空へアクセスする場所に配置され、トラッカ・タグは、資産に関連する装備からは動作させられず、トラッカ・タグは、トラッカ・タグの現在の動作を制御するプログラムされた命令を含むタグ・プロフィールがインストールされており、追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初はインストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含むものであり、かつ、方法は、b)マスター・タグ・プロフィールの再コンフィギュレーションを追跡情報サーバで行って次のタグ・プロフィールを作成するステップを含み、次のタグ・プロフィールは、トラッカ・タグの続いての動作を制御するプログラムされた命令を含むものであり、かつ、方法は、c)次のタグ・プロフィールをトラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップを含み、メッセージング・システムはトラッカ・タグへデータ通信ネットワークを介してアクセス可能であり、かつ、方法は、d)トラッカ・タグをパワー・アップする(電源を入れる)ステップと、e)ステート変化の状態をトラッカ・タグで検出し、ステート変化の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップとを含み、ステート変化の状態に対する応答は、次のタグ・プロフィールを伴うメッセージをメッセージング・システムから取り出すこと、および次のタグ・プロフィールをトラッカ・タグにインストールすることを含み、インストール後、次のタグ・プロフィールは、トラッカ・タグの現在の動作の制御のための、インストールされたタグ・プロフィールとなるものであり、かつ、方法は、f)データ収集の状態をトラッカ・タグで検出し、データ収集の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ収集の状態に対する応答は、トラッカ・タグに関連する1または複数のセンサ、資産に関連する1または複数のセンサ、および資産に関連する輸送手段に関連する1または複数のセンサのうちの少なくとも1つのセンサに関連するセンサ・データを収集および格納することを含むものであり、かつ、方法は、g)データ・ダウンロードの状態をトラッカ・タグで検出し、データ・ダウンロードの状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ・ダウンロードの状態に対する応答は、格納されたセンサ・データを追跡情報サーバへデータ通信ネットワークを介してダウンロードすることを含み、追跡情報サーバは、ダウンロードされたセンサ・データを処理してセンサ情報を作成し、センサ情報を追跡情報ネットワークを介して監視装置上に表示する。
【0014】
更に別の態様では、可動の資産の追跡を、追跡情報サーバと通信するトラッカ・タグを用いて行う方法が提供される。方法は、a)トラッカ・タグを可動の資産に取り付けるステップを含み、トラッカ・タグは、可動の資産の外部に沿って、資産の通常の移動の間にトラッカ・タグの視線が空へアクセスする場所に配置され、トラッカ・タグは、資産に関連する装置からは動作させられず、トラッカ・タグは、トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初はインストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含むものであり、方法は、b)マスター・タグ・プロフィールの再コンフィギュレーションを追跡情報サーバで行って次のタグ・プロフィールを作成するステップを含み、次のタグ・プロフィールは、トラッカ・タグの続いての動作を制御するプログラムされた命令を含むものであり、かつ、方法は、c)次のタグ・プロフィールをトラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップを含み、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、かつ、方法は、d)トラッカ・タグをパワー・アップするステップと、e)ステート変化の状態をトラッカ・タグで検出し、ステート変化の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップとを含み、ステート変化の状態に対する応答は、次のタグ・プロフィールを伴うメッセージをメッセージング・システムから取り出すこと、および次のタグ・プロフィールをトラッカ・タグにインストールすることを含み、インストール後、次のタグ・プロフィールは、トラッカ・タグの現在の動作の制御のためのインストールされたタグ・プロフィールとなり、かつ、方法は、f)データ収集の状態をトラッカ・タグで検出し、データ収集の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ収集の状態に対する応答は、トラッカ・タグ内のグローバル・ポジショニング・システム受信機に関連する位置データおよび時間データを収集および格納することを含み、かつ、方法は、g)データ・ダウンロードの状態をトラッカ・タグで検出し、データ・ダウンロードの状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ・ダウンロードの状態に対する応答は、格納された位置データおよび時間データを追跡情報サーバへデータ通信ネットワークを介してダウンロードすることを含み、追跡情報サーバは、ダウンロードされた位置データおよび時間データを処理して追跡情報を作成し、追跡情報を追跡情報ネットワークを介して監視装置に表示する。
【0015】
本明細書に記載された本発明の説明を読み、理解すると、当業者には本発明の利益および利点が明らかになる。
本発明は、1組の添付図面と関連して、より詳しく説明されている。
【発明を実施するための最良の形態】
【0016】
本発明は、添付図面と関連して説明するが、これらの図面は、本発明の実施形態の例を示すためのものであり、本発明をこうした実施形態に限定するためのものと解釈されるべきではない。本発明は、図面および関連の説明で提供されたもの以上に、様々な構成要素および構成要素の配置、および様々なステップおよびステップの構成で具体化することができることを理解されたい。図中、同様の参照番号は同様のエレメントを示す。
【0017】
図1を参照すると、追跡システム10の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、データ通信ネットワーク18、追跡情報ネットワーク20、監視装置22、およびGPS衛星コンステレーション24を含む。GPS衛星コンステレーション24は、地球の周りの軌道にのった複数のGPS衛星240(図3)を含む公共のGPS衛星コンステレーションであることが好ましい。各GPS衛星は、時計を含み、地球の中心に対してのそれ自体の軌道を把握している。各GPS衛星は、地球の中心に対するその位置および参照時間に対する時刻を、絶えずブロードキャストする。
【0018】
GPS衛星は、ユーザがGPS受信機で地球上または地球近くの各自の位置を突き止めることができることでよく知られている。こうしたシステムは一般に、航空、航海、自動車走行などのような、多くの異なる分野でのナビゲーションに用いられている。GPS衛星コンステレーション24は、十分なGPS衛星を含み、衛星は、地球の任意の点からみて4つのGPS衛星が地平線より上にあるように、離れて配置されることが好ましい。GPS受信機を備える機器は、4つのGPS衛星からの位置データおよび時間データから、地球の中心に対するその位置の経度、緯度、および高度を判定することができる。位置データおよび時間データが3つのGPS衛星から受信されると、機器は、その位置の経度および緯度を決定することができる。また、機器は、その位置データおよび時間データから、その速度を決定することもできる。
【0019】
1つの公共GPS衛星コンステレーションは、米国国防総省によって開発されたNAVSTAR GPS衛星コンステレーションである。NAVSTAR GPS衛星コンステレーションは、約19,300km(12,000マイル)で軌道にのっている27個のGPS衛星(24機が稼働、3機は予備)を含む。GPS衛星は、6つの面の対して分散しており、各面に少なくとも4つのGPS衛星を備えている。起動は、常に地球上のどこでも少なくとも4つのGPS衛星が地平線の上にあるように、定められる。GPS衛星コンステレーション24は、NAVSTAR GPS衛星コンステレーションであることが好ましい。しかし、追跡システム10は、ロシア連邦によって維持されているGLONASS衛星コンステレーションや、ヨーロッパ諸国によって導入されたGalileo衛星コンステレーションなどのような、他の任意の公共のGPS衛星コンステレーションとでも良好に作動する。GPS衛星コンステレーション24は、個人の衛星システムであってもよい。
【0020】
資産16は、航空機などのような可動の資産であることが好ましい。しかし、トラッカ・タグ12は、追跡情報を望まれる任意のタイプの資産に取り付けることができる。例えば、トラック、バン、自動車、貨物用コンテナ、トレーラ、バス、列車、機関車、軌道車、および船舶などである。トラッカ・タグ12は、そのトラッカ・タグからの視線上に通常は空が位置するように、資産16に取り付けられる。トラッカ・タグ12は、資産16の外部上側の最も高い点に取り外し可能に取り付けられることが好ましい。しかし、視線上に少なくとも3つまたは4つのGPS衛星が位置する任意の点が適する。高度の追跡情報が必要な場合は、少なくとも4つのGPS衛星へのアクセスが必要である。資産の通常の移動中にオペレータ、乗組員、または乗客がトラッカ・タグ12にアクセスできないように、トラッカ・タグ12は資産16上に配置されていることが好ましい。これによって、テロリストおよび他の敵がトラッカ・タグ12を取り外したり、無効にしたりできないようにすることができる。好適には、トラッカ・タグ12は、独立して電力供給され、資産から電気的に絶縁されており、追跡システム10の通常の動作中は手動の介入を必要としない。この特徴によっても、テロリストおよび他の敵がトラッカ・タグ12を無効にできないようにすることができる。しかしながら、代替例では、トラッカ・タグ12は、資産および/または資産と関連する輸送手段(transport vehicle)とインターフェースすることができる。このインターフェースは、資産/輸送手段のセンサから情報を受信するように、および/または、資産および/または輸送手段に関しての動作における或る状況を制御するように、適合される。例えば、トラッカ・タグ12は、資産および/または輸送手段の動作をディスエーブルにすること又はシャットダウンすることができる。
【0021】
トラッカ・タグ12は、視線上に空が位置する限り、GPS衛星コンステレーション24によって耐えずブロードキャストされるワイヤレス通信を選択的に受信する。ワイヤレス通信は、トラッカ・タグ12の視線内にある複数のGPS衛星240(図3)のそれぞれによって絶えずブロードキャストされる位置データおよび時間データを含む。トラッカ・タグ12は、複数のGPS衛星のそれぞれからの位置データおよび時間データを組み合わせて、位置/時間組合せデータ(combined position and time data)を形成する。トラッカ・タグ12は、データ通信ネットワーク18を介して追跡情報サーバ14と通信し、位置/時間組合せデータを追跡情報サーバ14へ選択的に送信する。好適には、データ通信ネットワーク18および追跡情報サーバ14に関して、トラッカ・タグ12は、TCP/IPプロトコルを用いるシン・クライアントである。
【0022】
トラッカ・タグ12は、追跡情報サーバ14からのコマンドおよび制御情報に基づいて位置データおよび時間データを受信するかどうかを決定する。同様に、トラッカ・タグ12は、追跡情報サーバ14からのコマンドおよび制御情報に基づいて位置/時間組合せデータを送信するかどうかを決定する。更に、トラッカ・タグ12は、位置および時間を受信するかどうかを決定するための事前にプログラムされた命令、および1またはそれ以上のオンボードのセンサを含むことができる。同様に、トラッカ・タグ12は、組み合わされた位置および時間のデータ(位置/時間組合せデータ)を送信するかどうかを決定するための事前にプログラムされた命令、およびオンボードのセンサを含むことができる。更に、トラッカ・タグ12は、1またはそれより多くの資産/輸送手段のセンサを、位置/時間組合せデータを送信するかどうかを決定するために、事前にプログラムされた命令とともに用いることもできる。トラッカ・タグ12は、位置データおよび時間データを受信し、位置/時間組合せデータを格納して、後にそれを送信できるようにする。オンボードのセンサが実施される場合、トラッカ・タグ12は、オンボードのセンサに関連するセンサ・データを、位置/時間組合せデータと共に格納することもできる。センサ・データは、位置/時間組合せデータの後の送信に含めることもできる。
【0023】
トラッカ・タグ12は、地球の中心を基準にしたそれ自体の位置について位置データおよび時間データを解明するアルゴリズムを含むことができる。アルゴリズムは、所望される追跡情報のタイプに応じて、三辺測量様式で、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度、経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。XYZデータまたはXYデータと関連する時間データも生成される。解明アルゴリズム(resolving algorithm)の分解度は、緯度(X)が約457.2mm(18インチ)、経度(Y)が約457.2mm(18インチ)、高度(Z)が約457.2mm(18インチ)である。解明アルゴリズムがトラッカ・タグ12に実装される場合、位置/時間組合せデータは、XYZデータまたはXYデータ、および関連する時間データを含む。一般に、解明アルゴリズムは、追跡情報サーバへ送信されるデータ量を減らす。トラッカ・タグ12は、データ送信に必要な時間量を更に低減するためにデータ圧縮プロセスを含むことができる。トラッカ・タグ12は、追跡情報サーバ14との安全な通信のために暗号化プロセスおよび解読プロセスを含み得る。別の代替例として、トラッカ・タグ12は、位置/時間組合せデータの送信を安全にするための暗号化プロセスを含むことができる。これは、テロリストおよび他の敵が位置/時間組合せデータを用いて資産の場所を突き止めたり、資産を標的としたりすることを防ぐことができる。
【0024】
トラッカ・タグ12と、資産16または資産と関連する輸送手段との間の通信はオプションであり、有線でも無線でもよい。トラッカ・タグ12とデータ通信ネットワーク18との間の通信はワイヤレスである。追跡情報サーバ14とデータ通信ネットワーク18との間の通信は、配線によるものが好ましい。しかし、この通信をワイヤレスとすることも可能である。データ通信ネットワーク18は、トラッカ・タグと追跡情報サーバ14との間の通信に適した無線および有線の通信技術の任意の組み合わせで実現することができる。データ通信ネットワーク18は、公共のネットワーク、私有のネットワーク、または公共ネットワークおよび私有ネットワークの任意の組み合わせとすることができる。
【0025】
例えば、データ通信ネットワーク18は、データ通信衛星システム、地上電話システム、ケーブル・テレビジョン・システム、コンピュータ・ネットワーク、および他の適したデータ通信ネットワークの1または複数のものを任意の組み合わせで含み得る。データ通信衛星システムは、衛星電話システムまたは私有衛星ネットワークを含み得る。衛星電話システムは、イリジウム(Iridium)衛星システム、グローバルスター(Globalstar)衛星システム、オーブコム(Orbcomm)衛星システム、インマルサット(Inmarsat)衛星システム、または他の任意の適した公共衛星電話システムなどのような、任意の公共衛星電話システムでよい。地上電話システムは、公衆交換電話網(PSTN)、広域帯統合サービス・デジタル通信網(ISDN)、デジタル加入者線(DSL)、セルラ式電話ネットワーク、パーソナル通信システム(PCS)・ネットワーク、または他の任意の適した地上電話ネットワークなどのような、地上通信線またはワイヤレスの電話システムの任意の組み合わせを含むことができる。コンピュータ・ネットワークは、有線ローカル・エリア・ネットワーク(LAN)および無線LANの任意の組み合わせを含むことができる。コンピュータ・ネットワークはEthernet(即ち、有線LANではIEEE802.3、無線LANではIEEE802.11)であることが好ましい。しかし、トークン・リング、光ファイバ分散データ・インターフェイス(FDDI)、ARCNET、およびHiperLANなどのような、他の任意の適したネットワーク通信プロトコルを備えることもできる。
【0026】
こうした様々な通信技術を任意の組み合わせで結合して、ワイド・エリア・ネットワーク(WAN)またはメトロポリタン・エリア・ネットワーク(MAN)を形成することができる。特に、トラッカ・タグ12とデータ通信ネットワークとの間のワイヤレス通信は、衛星、セルラー電話、PCS、無線LAN、または他の任意の適したワイヤレス技術によって実施することができる。
【0027】
追跡情報サーバ14は、コマンドおよび制御情報をトラッカ・タグ12へ選択的に提供し、トラッカ・タグ12から位置/時間組合せデータを受信する。追跡情報サーバ14は、位置/時間組合せデータを選択的に処理し、資産16の移動を監視するための特定の追跡情報を選択的に生成する。追跡情報サーバ14は、選択的に、監視装置22の許可されたユーザが追跡情報ネットワーク20を介して追跡情報へアクセスできるようにする。許可されたユーザとは、例えば、加入者、資産を監視するように任命された従業員、追跡情報サーバ14に関連するオペレータ/管理者などである。追跡情報サーバ14は、監視装置22の許可されたユーザからコマンドおよび制御情報を選択的に受信することもできる。好適には、追跡情報サーバ14は、TCP/IPプロトコルでのデータ通信ネットワーク18および追跡情報ネットワーク20を介したデータ通信との互換性がある。
【0028】
追跡情報サーバ14は、i)コマンドまたは制御情報をトラッカ・タグ12へ提供するか否か、ii)位置/時間組合せデータを処理するか否か、iii)追跡情報を生成するか否か、およびどのようなタイプの追跡情報を生成すべきか、iv)ユーザが許可されているか否か、v)追跡情報へ、許可されたユーザがアクセスできるようにするか否か、およびvi)許可されたユーザからコマンドまたは制御情報を受信するか否か、を決定するためのプログラムされた命令を含むことができる。プログラムされた他のタイプの命令も可能である。プログラムされた命令は、最初に、監視装置22の許可されたユーザによってコンフィギュレーションされ、編集され、そして/または補足されることができる。プログラムされた命令の中には、追跡システム10が資産16を追跡する間に、最初にコンフィギュレーションされ、編集され、補足されるものもある。
【0029】
コマンドは、トラッカ・タグ・コマンド、即ち、位置データおよび時間データの受信を開始させるコマンド、位置/時間組合せデータの送信を開始させるコマンド、位置/時間組合せデータの送信を停止させるコマンド、および位置データおよび時間データの受信を停止させるコマンドを含み得る。また、コマンドは、追跡情報サーバ・コマンド、即ち、位置/時間組合せデータの処理を開始させるコマンド、幾つかのタイプの追跡情報の生成を開始させるコマンド、幾つかのタイプの追跡情報の生成を停止させるコマンド、および位置/時間組合せデータの処理を停止させるコマンドも含む。他のタイプのコマンドも可能である。
【0030】
制御情報は、タグ・プロフィールと、トラッカ・タグから資産へのリンクと、資産からその資産に関連するエレメントへのリンクと、および資産またはその資産のエレメントと関連するリンク情報とを含むことができる。
【0031】
一般に、タグ・プロフィールは、追跡される資産のタイプ、および加入者によって契約が結ばれた追跡情報サービスに合わせて、作成される。タグ・プロフィールは、例えば、リアルタイム追跡、特定の検出されたイベントの際に行われる追跡、定期的な追跡、および/またはコマンドの際に行われる追跡を指定することができる。更に、タグ・プロフィールは、検出されたイベントに関連する閾値、推定された到着時間および/または移動経路の予測に関連するパラメータ、監視のために許可された追跡情報のタイプ、および許可された追跡情報レポートのタイプを含み得る。より具体的には、タグ・プロフィールは、i)監視すべき追跡情報および頻度、ii)始動およびシャットダウンに関連する振動の閾値、iii)通常の移動に関連する振動の閾値、iv)制限された区域、v)危険区域、vi)予定されたコース、vii)高ストレス状態、viii)燃料および燃料消費情報、およびix)処理すべきレポートおよびレポート頻度を含み得る。追加情報もタグ・プロフィールに含めることができる。
【0032】
典型的には、トラッカ・タグ12は、追跡情報サーバ14への通信に組み込まれるトラッカ・タグ識別データを含む。このようにして、特に複数のトラッカ・タグ12が追跡情報サーバ14と通信しているときに、追跡情報サーバ14は、位置/時間組合せデータを識別する。トラッカ・タグ12から資産14へのリンクによって、追跡情報サーバは位置/時間組合せデータを資産に関連付けることができるようになり、従って、追跡情報が資産を参照することができる。例えば、トラッカ・タグ識別データを航空機の尾翼番号にリンクすることができる。同様に、資産からエレメントへの追加のリンクによって、位置/時間組合せデータを資産のエレメントに関連付けることもできる。例えば、エレメントは、航空機エンジンの燃料ポンプとすることができる。第1のリンクは、トラッカ・タグ識別データを航空機の尾翼番号に関連付け、第2のリンクは、燃料ポンプのシリアル番号を航空機の尾翼番号に関連付けることができる。エレメントの更なる例としては、オペレータ、乗組員、乗客、資産の所有者、積載品目、操作機器項目、および支援機器項目などがある。他のタイプのエレメントも可能である。複数のエレメントを識別し、所与の資産にリンクすることができる。
【0033】
リンク情報は、リンクに関連する記述的情報であり、例えば、i)資産識別データ、ii)資産証明、iii)資産稼働情報、iv)資産メンテナンス情報、v)エレメント識別データ、vi)エレメント証明、vii)エレメント稼働情報、およびviii)エレメント・メンテナンス情報などである。他のタイプのリンク情報も可能である。
【0034】
追跡情報サーバ14またはトラッカ・タグ12におけるプログラムされた命令は、様々なタイプの制御情報の任意の組み合わせを含み得る。同様に、典型的に、コマンドは、プログラムされた命令に含められ、従って、或るイベントが検出されるとき又は或るシーケンスが行われるとき、コマンドを自動的に伝達することが可能である。
【0035】
追跡情報サーバ14は、位置/時間組合せデータに含まれる生のGPS位置データおよび時間データから、トラッカ・タグ12の位置データおよび時間データを解明するアルゴリズムを含み得る。解明アルゴリズムは、トラッカ・タグ12における解明アルゴリズムに関して上述したのと同様に、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度、経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。これにより、ユーザおよび/または追跡情報サービス・プロバイダによる選択に依存するもりであるが、トラッカ・タグ12または追跡情報サーバ14におけるXYZデータの解明が可能となる。また、このアルゴリズムは、XYZデータまたはXYデータに関連する時間データを生成する。解明アルゴリズムがトラッカ・タグ12により実行される場合、それを再び追跡情報サーバ14で行う必要はない。逆に、解明アルゴリズムがトラッカ・タグ12により実行されない場合、追跡情報サーバ14はXYZデータの解明を行わねばならない。追跡情報サーバ14は、圧縮された位置/時間組合せデータ送信を圧縮解除するデータ圧縮解除プロセスを含み得る。追跡情報サーバ14は、トラッカ・タグ12との安全な通信のために暗号化プロセスおよび解読プロセスを含み得る。別の代替例として、追跡情報サーバ14は、安全保護された位置/時間組合せデータ送信を解読するための解読プロセスを含むことができる。
【0036】
追跡情報ネットワーク20は、追跡情報サーバ14と監視装置22との間の通信に適した無線および有線の通信技術の任意の組み合わせを実装することができる。好適には、追跡情報ネットワーク20と追跡情報サーバ14との間の通信、および追跡情報ネットワーク20と監視装置22との間の通信は、何れも有線によるものが好ましい。しかし、こうした通信の何れかが無線、または両方が無線であってもよい。データ通信ネットワーク18と同様に、追跡情報ネットワーク20は、公共ネットワーク、私有ネットワーク、または公共ネットワークと私有ネットワークとの任意の組み合わせとすることができる。従って、データ通信ネットワーク18について上記で特定したネットワークも、追跡情報ネットワーク20において実施することができる。特に、追跡情報ネットワーク20はインターネットを含み得、インターネットは、上記で特定した主な通信システムのそれぞれを介してアクセス可能である。追跡情報ネットワーク20およびデータ通信ネットワーク18は互いにリンクされ、共通の追跡システム・ネットワークを形成することができる。
【0037】
監視装置22は、追跡情報サーバ14との通信および追跡情報の表示に適した任意のタイプの装置である。例えば、パーソナル・コンピュータ、ノートブック・コンピュータ、PDA、ワイヤレスPDA、セルラー電話、衛星電話、ページャ、または他の任意の適した表示装置である。好適には、追跡情報サーバ18は、適したセキュリティ手段を用いてインターネットに接続されているウェブ・サーバを介して追跡情報を提供する。従って監視装置22は、追跡情報を受信し、資産の動きを監視するために、インターネットにアクセスできることが好ましい。しかし、監視装置22と追跡情報サーバ14との間の通信に公共インターネットは必要ない。他の代替例は、私有ネットワークを介した通信、または公共ネットワークを介した1対1のダイヤルアップ型の通信を含む。
【0038】
トラッカ・タグ12と、資産16または資産16と関連する輸送手段との間のオプションの通信経路は、任意の適切な有線または無線の通信技術を介して実現することができる。例えば、トラッカ・タグ12は、資産16または輸送手段と関連する任意のタイプの適切な通信網または通信ポートに対するインターフェースを含むことができる。例えば、通信網または通信ポートは、種々のタイプのシリアルまたはパラレルのバス(例えば、コントローラ・エリア・ネットワーク(CAN)・バス、ユニバーサル・シリアル・バス(USB)など)や、イーサネット(R)(例えば、IEEE802.3(有線)、IEEE802.11(無線)など)や、ブルートゥース(Bluetooth)の技術を実装することができる。
【0039】
図1は、1つのトラッカ・タグ12および1つの監視装置22を備える追跡システム10を示すが、システムを、複数のトラッカ・タグおよび/または複数の監視装置を含むように拡張することができる。複数のトラッカ・タグの使用によって、ユーザは、1群の航空機またはすべての飛行中の航空機などのような、複数の資産を監視できるようになる。複数の監視装置の使用によって、複数のユーザが資産を監視できるようになる。例えば、貨物用航空機を、その貨物に関連する様々なユーザ、航空機の所有者、航空機燃料ポンプ製造業者、運送会社、および政府監督官庁によって監視することができる。当然、複数のトラッカ・タグおよび複数の監視装置の双方の使用は、更なるシナリオの組み合わせを提供する。
【0040】
好適には、追跡情報サーバ14は、一つの設備に収納される。しかし、複数の設備に分散して、互いにネットワーク化していてもよい。好適には、追跡情報サーバ14は、地上システムである。しかし、空挺プラットフォーム、船舶プラットフォームなどのような、他のタイプのプラットフォームも可能である。
【0041】
図2を参照すると、グローバル追跡システム26の実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、イリジウム衛星コンステレーション28、イリジウム衛星/PSTNゲートウェイ30、PSTN32、イリジウム衛星/インターネット・ゲートウェイ34、およびインターネット36を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して述べたとおりである。
【0042】
追跡システム26のグローバルな実施は、グローバルな有効範囲(即ち、世界的通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、衛星電話システムおよび地上電話ネットワークによって提供される。示したように、好ましい衛星電話システムは、イリジウム電話システムである。しかし、グローバルな有効範囲を提供する他の衛星電話システムをグローバル追跡システム26に実装することもできる。好ましい地上電話ネットワークはPSTNである。しかし、他のタイプの地上電話ネットワークを実装することもできる。より具体的には、データ通信ネットワーク18(図1)は、イリジウム衛星コンステレーション28、イリジウム衛星/PSTNゲートウェイ30、およびPSTN32によって提供される。
【0043】
記載した実施形態では、追跡情報ネットワーク20(図1)は、衛星電話システムおよびインターネット36によって提供される。示したように、好ましい衛星電話システムは、イリジウム電話システムである。しかし、グローバルな有効範囲を提供する他の衛星電話システムをグローバル追跡システム26に実装することもできる。より具体的には、追跡情報ネットワーク20(図1)は、イリジウム衛星コンステレーション28、イリジウム衛星/インターネット・ゲートウェイ34、およびインターネット36によって提供される。
【0044】
資産に取り付けられるトラッカ・タグ12のグローバルな有効範囲は、イリジウム衛星システムによって提供される。同様に、加入者/クライアント・ユーザによる監視装置での追跡情報へのグローバル・アクセスは、イリジウム衛星システムによって提供される。グローバル追跡システムの追加の実施形態では、グローバル・アクセスが必要ない場合、データ通信ネットワーク18がグローバルな有効範囲を提供する一方で、追跡情報ネットワーク20(図1)は、追跡情報サーバ14への地域的なアクセスまたはローカルなアクセスを提供する他の通信ネットワークを実装することができる。逆に、グローバル追跡システムの別の実施形態では、グローバル追跡が必要ない場合、追跡情報ネットワーク20がグローバルな有効範囲を提供する一方で、データ通信ネットワーク18(図1)は、資産の地域的またはローカルな追跡を提供する他の通信ネットワークを実装することができる。
【0045】
図3を参照すると、GPS衛星コンステレーション24は、地球37の周囲の軌道にのった複数のGPS衛星240を含む。
図4を参照すると、イリジウム衛星コンステレーション28は、平均高度670km(420マイル)の低地球周回軌道(LEO)で地球37の周囲の軌道にのった66個のイリジウム衛星280を含む。イリジウム衛星280は6つの軌道面にあり、軌道面当たり11個の衛星がある。イリジウム衛星システム内において、イリジウム衛星280は、イリジウム電話(即ち、無線送受信機または双方向無線)および地上通信線およびワイヤレス電話システムへのゲートウェイ、およびインターネットへのゲートウェイと通信する。特に、インターネット・ゲートウェイでは、イリジウム衛星システムは、インターネット・サービス・プロバイダ(ISP)である。イリジウム衛星システムを介した音声、データ、およびインターネットの世界的なサービスは、イリジウム衛星LLCによって提供される。
【0046】
図5を参照すると、データ通信衛星コンステレーションの軌道の例の高度を示している。イリジウム衛星コンステレーション28、オーブコム衛星コンステレーション40、テレデシック衛星コンステレーション41、グローバルスター衛星コンステレーション42、およびスカイブリッジ衛星コンステレーション43は、LEOで地球37の周囲の軌道にのっている。コンコルディア衛星コンステレーション44、Orblink衛星コンステレーション45、およびICO衛星コンステレーションは、中地球周回軌道(MEO)で軌道にのっている。NAVSTAR GPS衛星コンステレーション38およびグロナス衛星コンステレーション39は、より高い高度で地球の周囲の軌道にのっている。
【0047】
図5は、本特許出願の概念と関連して使用できる衛星コンステレーションの様々な軌道高度を示す。1または複数のこうした衛星システムの使用によって、本明細書に記載したように、意図した動作が得られる。
【0048】
図6を参照すると、追跡システム10の一実施形態では、GPSデータが、GPS衛星240から資産16(例えば、一般的な航空機など)上のトラッカ・タグ12へ流れる。トラッカ・タグ・データからのデータ送信は、イリジウム衛星280によって中継されて、イリジウム衛星/PSTNゲートウェイ28へ送られる。
【0049】
図6は特に、トラッカ・タグがデータをイリジウム衛星へ送信し、イリジウム衛星がこの情報を地上局へ送信することに注目しており、更にトラッカ・タグへ情報を提供するGPS衛星の使用が示されている。
【0050】
図7を参照すると、トラッカ・タグ12の一実施形態は、電源/電力変換モジュール47、データ通信リンク48、およびデータ収集/処理モジュール49を含む。電源/電力変換モジュール47は、電力をデータ通信リンク48およびデータ収集/処理モジュール49へ提供する。これによって、トラッカ・タグ12は、外部電源から独立して動作することができる。データ収集/処理モジュール49は、トラッカ・タグ12の視線内にあるGPS衛星240(図3)から位置データおよび時間データを選択的に受信し、生のGPS位置および時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータを選択的に格納する。データ収集/処理モジュール49は、位置/時間組合せデータをデータ通信リンク48へ選択的に通信する。データ通信リンク48は、データ通信ネットワーク18(図1)を介して位置/時間組合せデータを追跡情報サーバ14(図1)へ選択的に送信する。また、データ通信リンク48は、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。
【0051】
記載した実施形態では、電源/電力変換モジュール47は、電源50、バックアップ・バッテリ52、電力分配モジュール54、およびバッテリ充電器56を含む。電源50は、電力を電力分配モジュール54へ提供する。電源50は、圧電電力生成器(piezoelectric power generator)、太陽光集光パネル86(図8)、1次バッテリ、および他のタイプの適した電源の任意の組み合わせを含み得る。電力分配モジュール54は、適した電力がトラッカ・タグ12の様々なコンポーネントへ提供されるように、電力を調整する。電力分配モジュール54は、電力を、バッテリ充電器56、データ通信リンク48、およびデータ収集/処理モジュール49へ分配する。バッテリ充電器56は、充電電流をバックアップ・バッテリ52へ選択的に印加する。例えば、電源からの電力が少ない場合、バッテリ充電器56は、充電電流を印加しない場合がある。バックアップ・バッテリ52は電力を電力分配モジュール54へ選択的に提供する。例えば、電源からの電力が適切である場合、バックアップ・バッテリ52は、電力分配モジュール54へ電力を提供しない場合がある。
【0052】
記載した実施形態では、データ通信リンク48は、RFアンテナ58、無線送受信機60、および暗号化/解読プロセス62を含む。無線送受信機60およびRFアンテナ58は、データ通信ネットワーク18(図1)を介して位置/時間組合せデータを追跡情報サーバ14(図1)へ選択的に送信する。また、RFアンテナ58および無線送受信機60は、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。暗号化/解読プロセス62は、オプションであり、トラッカ・タグ12によって送信または受信された任意のタイプの通信を暗号化および/または解読することができる。暗号化/解読プロセス62は、追跡情報サーバ14へのすべての通信を暗号化し、追跡情報サーバ14からのすべての通信を解読することができる。あるいは、暗号化/解読プロセス62を、追跡情報サーバ14へ送信される位置/時間組合せデータの暗号化に限定することもできる。
【0053】
記載した実施形態では、データ収集/処理モジュール49は、GPSアンテナ64、GPS受信機65、環境センサ66、制御装置67、およびコントローラ68を含む。GPSアンテナ64およびGPS受信機65は、トラッカ・タグ12の視線内のGPS衛星240(図3)から位置データおよび時間データを選択的に受信する。コントローラ68は、生のGPS位置データおよび時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータを選択的に格納する。コントローラ68は、位置/時間組合せデータをデータ通信リンク48へ選択的に伝達する。
【0054】
環境センサ66はオプションである。実装されている場合、環境センサ66は、1または複数の加速度計を含むことができる。環境センサ66が、例えば、加速度計を含む場合、環境センサ66は振動を感知し、振動測定値をコントローラ68へ提供する。コントローラは、振動測定値と事前に決定されている閾値とを比較して、様々なタイプのイベントを検出する。例えば、振動測定値を用いると、コントローラは、i)資産16(図1)に関連する動力装置の起動、ii)動力装置のシャットダウン、iii)資産の移動の開始、iv)資産の移動の休止、v)資産の加速度の過度の増加、vi)資産の加速度の過度の低下を検出することができる。典型的には、コントローラ68は、検出されたイベント・データを、関連する位置/時間組合せデータとともに選択的に格納するものであり、位置/時間組合せデータを後に送信するとき、その送信に、検出されたイベント・データを含めることができる。また、環境センサ66は、他のタイプの環境状態を感知することもできる。例えば、環境センサは、1以上の温度センサ、1以上のひずみゲージ、および1以上の他のタイプの環境センサ、例えば、電圧、圧力、電界(eフィールド)、他の定量化が可能なパラメータなどを感知するセンサを含むこともできる。環境センサ66は、1つの任意のタイプのセンサ又は複数の任意のタイプのセンサの組み合わせを表す。
【0055】
コントローラ68は何れのセンサも用いることができ、そのセンサを用いてイベントを検出し、その後にトラッカ・タグ12の動作を変更する。同様に、コントローラ68はGPS衛星240からの位置/時間組合せデータを用いることができ、そのデータを用いて時間および/または位置と関連したイベントを検出し、その後にトラッカ・タグの動作を変更する。更に、位置/時間組合せデータが追跡情報サーバ14(図1)へ送られるとき、その送信には、トラッカ・タグ12と関連する任意のセンサからのセンサ・データを含むことができ、特には、センサ・データまたは位置/時間組合せデータと関連する検出されたイベント・データを含むことができる。
【0056】
コントローラ68は、検出されたイベントを用いて、トラッカ・タグ12が位置データおよび時間データの受信を開始すべきか否か、位置/時間組合せデータの格納を開始すべきか否か、位置/時間組合せデータの送信を開始すべきか否を決定することができる。例えば、コントローラ68は、トラッカ・タグ12に、航空機が離陸すると位置データおよび時間データの受信および位置/時間組合せデータの格納を開始させ、航空機が移動を開始すると位置/時間組合せデータの送信を開始させ、事前に決定された時間の後にその送信を停止させ、航空機が乱気流に遭遇すると送信を再開させ、事前に決定された時間の後に送信を再度停止させ、航空機が移動を停止すると位置データおよび時間データの受信を停止させ、航空機が移動を停止すると送信を再開させ、格納されたすべての位置/時間データが送信されると送信を停止させる、ようにすることができる。
【0057】
制御装置67はオプションであり、トラッカ・タグ12の手動の起動およびシャットダウンを提供する。制御装置67は、意図した目的に適した任意のタイプのスイッチまたはコントロールとすることができる。制御装置67は、コントローラ68、および電源/電力変換モジュール47と通信する。制御装置67を起動すると、電源50がイネーブルにされ、コントローラ68は、順序立ってパワーアップ・シーケンスを開始する。シャットダウンが開始されるとき、コントローラ68は、順序立ってシャットダウン・シーケンスを開始し、適当なときに、電源50をディスエーブルにする。
【0058】
記載した実施形態では、コントローラ68は、プロセッサ70、記憶装置72、および補助入力/出力(I/O)ポート74を含む。プロセッサ70は、GPS受信機65、環境センサ66、制御装置67、記憶装置72、補助I/Oポート74、データ通信リンク48と通信する。記憶装置72は、データ・バッファ76、トラッカ・タグ識別データ78、およびタグ・プロフィール79を含む。プロセッサ70は、GPS受信機65から位置データおよび時間データを受信する。プロセッサ70は、生のGPS位置データおよび時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータをデータ・バッファ76に選択的に格納する。プロセッサ70は、位置/時間組合せデータを、データ・バッファ76からデータ通信リンク48へ選択的に通信する。
【0059】
プロセッサ70は、図1を参照して上述した解明アルゴリズムを含み得る。解明アルゴリズムを用いると、プロセッサ70は、XYZデータまたはXYデータおよび関連する時間データを生成しながら、位置/時間組合せデータを一時的に格納する。XYZデータまたはXYデータ、および関連する時間データが生成されると、それらはデータ・バッファ76に格納され、対応する生のGPS位置データおよび時間データがパージされる。データ通信リンク48へ通信される位置/時間組合せデータは、生のGPS位置データおよび時間データの代わりに、XYZデータまたはXYデータおよび関連の時間データを含む。
【0060】
環境センサ66が実装された場合、プロセッサ70は、上述の振動センサによる振動の測定および/または種々の他のタイプのセンサによる他のタイプの測定(即ち、温度、ひずみ、電圧、圧力、電界)に関連するイベントを検出する。プロセッサ70は、XYZデータまたはXYデータを用いて、資産の位置に関連する更に別のイベントを検出することができる。プロセッサ70は、XYZデータまたはXYデータを、事前に決定されたXYZ座標またはXY座標の制限と比較して、幾つかのイベントを検出する。例えば、プロセッサ70は、資産が、i)制限区域付近にあるとき、ii)制限区域内にあるとき、iii)危険区域付近にあるとき、iv)危険区域内にあるとき、v)中間地点にあるとき、vi)目的地にあるとき、vii)進路外にあるとき、viii)高ストレス状態に近いとき、ix)高ストレス状態を経験しているとき、x)高度が過度に低下しているとき、xi)高度が過度に上昇しているとき、xii)予期せぬ停止または著しい減速に遭遇しているとき、またはxiii)速度制限を超えているときに、それを検出することができる。更に別のタイプの検出イベントも可能である。
【0061】
典型的に、プロセッサ70は、検出されたイベント・データを、関連する位置/時間組合せデータとともに、選択的に格納する。振動に関連する検出イベントのように、プロセッサ70は、位置および時間に関連する任意の検出イベントを用いて、トラッカ・タグ12が位置データおよび時間データの受信を開始すべきか否か、位置/時間組合せデータを格納すべきか否か、また位置/時間組合せデータを送信すべきか否かを決定することができる。更に、任意のタイプの検出されたイベントを、監視装置22(図1)で加入者/クライアント・ユーザへ提供される追跡情報に含めることができる。
【0062】
プロセッサ70は、データ通信リンク48からコマンドおよび制御情報を受信する。一実施形態では、プロセッサ70は、メッセージング・システム(例えば、ポイント−オブ−プレゼンス3(POP3)eメール・サーバなどのようなeメール・システム、テキスト・メッセージング・システムなど)へログインして、トラッカ・タグ12と関連するアドレスへメッセージを取り出すことにより、コマンドおよび制御情報を受信する。この実施形態では、コマンドおよび制御情報は、追跡情報サーバ14(図1)からのメッセージに含まれる。メッセージは、監視装置22(図1)の認可されたユーザにより作られている。メッセージング・システムは、追跡情報サーバ14(図1)の中にあってもよく、また、独立のeメール・サービス・プロバイダを通じてのものでもよい。タグ・プロフィール79に格納される情報は、事前に決定し、制御情報で提供することができる。あるいは、タグ・プロフィール79は、事前に決定し、記憶装置72に永久的に常駐していてもよい。別の代替例では、タグ・プロフィール70、またはタグ・プロフィール70内の或る情報を、トラッカ・タグ12の動作中にコンフィギュレーションおよび/または編集することができる。
【0063】
プロセッサ70は、位置/時間組合せデータがデータ・バッファ76から通信リンク48へ通信されるときにそれを制御することによって、追跡情報サーバ14(図1)へのデータ通信を管理する。典型的には、プロセッサ70は、1グループの位置/時間組合せデータがデータ・バッファ76に蓄積されるのを待つことによって、バースト様式でデータ通信を制御する。これは、コマンド、制御情報、および/またはタグ・プロフィール79を基にし得る。プロセッサ70は、トラッカ・タグ識別データ78と共にそれぞれの送信バーストをエンコードし、それによって、追跡情報サーバ14が、送信されたデータを適切なトラッカ・タグ12に関連付けることができるようにする。イベント・データは典型的にはデータ・バッファ76に格納される。また、送信バーストは、バーストに含まれる位置/時間組合せデータに関連するイベント・データを含むこともできる。
【0064】
一実施形態では、プロセッサは、データ通信ネットワーク18(図1)内で公共データ通信システムを介した仮想私有ネットワーク(VPN)の接続を維持するために、送信バースト間のタイミングを制御する。例えば、公共データ通信システムは、イリジウム衛星システム、同様の衛星システム、またはVPNを提供する任意のタイプの無線電話システムとすることができる。プロセッサ70は、追跡システム10(図1)がリアルタイム追跡情報を提供することができるように、送信バースト間のタイミングを制御することができる。あるいは、プロセッサ70は、データ通信ネットワークを介した送信時間を最低限に抑えるためにタイミングを制御することができる。従って、接続時間に対して料金を請求する公衆電話網や他のキャリヤーの通信コストを最低限に抑える。別の代替例として、プロセッサ70は、送信開始コマンドがデータ通信ネットワークを介して受信されるまで、送信バーストを遅らせることができる。典型的には、プロセッサ70は、送信バーストの受信通知がデータ通信ネットワーク18(図1)を介して受信されるまで、各送信バーストに関連するデータ・バッファに位置/時間組合せデータを維持する。
【0065】
補助I/Oポート74はオプションであり、コンピュータ装置をトラッカ・タグ12へ直接接続するポートを提供する。例えば、コンピュータ装置を用いて、トラッカ・タグのメンテナンスを行ったり、データ・バッファ76から位置/時間組合せデータをダウンロードすることができる。コンピュータ装置は、パーソナル・コンピュータ、ノートブック・コンピュータ、PDA、または同様の装置とすることができる。
【0066】
図8〜10を参照すると、トラッカ・タグ12の一実施形態は、涙形状のハウジング80を有する。ハウジング80には、2つの空気運動パワー/ファン・チューブ(air movement power/fan tube)82が備えら、チューブの一部の内側にパワー気流レバー(power airflow lever)84を備える。太陽光集光パネル86は、ハウジング80の上部に固定されている。パワー気流レバー84および太陽光集光パネル86は、電力を生成し、補助電源(図50)(図7)として働く。トラッカ・タグ12の前縁部88に垂直の気流90は、パワー気流レバー84を稼働させて電力を生成する。太陽光集光パネル86は、光から電力を生成する。
【0067】
図9を参照すると、記載した実施形態では、電源/電力変換モジュール47、データ通信リンク48、およびデータ収集/処理モジュール49が、ハウジング80の上部を取り除いた状態で示されている。
【0068】
図8および図9には、本発明の概念によるトラッカ・タグの一実施形態を示す。上述のように、このトラッカ・タグは、全体として航空機や地上車両や船舶の電源から独立しているため、種々の電力生成機構がトラッカ・タグ自体に提供される。例えば、トラッカ・タグ12は、空気運動パワー/ファン・チューブ82およびパワー気流レバー84を有する気流技術を含む。気流90がチューブに入ると、電力が生成される。追加の電源として、トラッカ・タグには太陽光集光パネル86も提供される。トラッカ・タグの一定の動作を保証するために、バックアップ・バッテリ52(図7)がトラッカ・タグ12内の電源/電力変換モジュール47(図7)と相互接続されている。バッテリは、代替の電源のうちの1つによって選択的に再充電することができる。航空機、地上車両、または船舶上のトラッカ・タグから追跡情報サーバ14(図1)または他の適した場所へ、インターネットなどを介しての通信を提供するために、追跡システムは、多方向送受信アンテナおよび無線GPS受信機およびRF双方向無線システム・パッケージも含む。また、この実施形態は、風の抵抗を減らすために、小型の涙形状(low profile tear-shaped)の設計のトラッカ・タグ12を形成することにも留意されたい。
【0069】
図10を参照すると、記載した実施形態では、涙形状のハウジング80の空気力学的特徴が側面図に示されている。図示したように、前縁部88が左側にある。
図10は、飛行機の胴体に配置されるトラッカ・タグ12の側面を示す。トラッカ・タグ12の航空機への取り付けを示すより大きい全体像も図6に示す。これらの図からわかるように、トラック・タグ12は、航空機の内部システムから物理的および電気的に隔離され得る。これは、常にトラッカ・タグの独立性を保証する。
【0070】
この実施形態ではトラッカ・タグを小型の涙形状で示しているが、他の空気力学設計も適していることに更に留意されたい。更に、電力の生成については、エア・マウント・パワー・ファン・チューブ(air mount power fan tube)および太陽光集光パネル、およびバックアップ・バッテリとして示しているが、他の形式のエネルギー生成機構を実装することもできることを理解されたい。例えば、説明を限定するものではないが、ゲル・セル(gel cell)、燃料電池、水素電池、タービン技術、フライ・ホイール技術、および更に他の電力生成構成を用いて、トラッカ・タグ12の信頼できる動作を保証することもできる。更に、トラッカ・タグ12を地上車両や船舶に取り付けることもできる。
【0071】
図11を参照すると、追跡情報サーバ14の一実施形態は、システム・コントローラ92、メッセージング・システム93、通信リンク94、データ・ウェアハウス96、ウェブ・サーバ98、ファイル・サーバ100、およびクライアント通信インターフェイス102を含む。通信リンク94は、コマンドおよび制御情報をトラッカ・タグ12(図1)へ選択的に提供し、位置/時間組合せデータをトラッカ・タグ12から受信する。データ・ウェアハウス96は、位置/時間組合せデータを選択的に処理して、タグ・データ、資産データ、および/またはエレメント・データを形成する。メッセージング・システム93はオプションであり、eメール・メッセージング・システム、テキスト・メッセージング・システム、およびページング・システムのうちの少なくとも1以上のものを含むことができる。
【0072】
ウェブ・サーバ98は、追跡情報を表示する1組のウェブ・ページを含む。ウェブ・サーバ98は、タグ・データ、資産データ、および/またはエレメント・データをマイニングするデータ・ウェアハウス96とともになり、1または複数のウェブ・ページを、資産16(図1)の移動を監視するための追跡情報で選択的に埋める。ウェブ・サーバ98は、クライアント通信インターフェイス102とともになり、追跡情報を、追跡情報ネットワーク20(図1)を介して監視装置22(図1)の許可されたユーザから選択的にアクセスできるようにする。
【0073】
また、データ・ウェアハウス96は、タグ・データ、資産データ、および/またはエレメント・データを処理して、タグ・レポート、資産レポート、および/またはエレメント・レポートにすることもできる。レポート処理が実施されると、タグ・レポート、資産レポート、および/またはエレメント・レポートはファイル・サーバ100に格納される。ウェブ・サーバ98は、ファイル・サーバ100およびクライアント通信インターフェイス102とともになり、タグ・レポート、資産レポート、および/またはエレメント・レポートを、追跡情報ネットワーク20(図1)を介して監視装置22(図1)の許可されたユーザから選択的にアクセスできるようにする。
【0074】
ウェブ・サーバ98は、クライアント通信インターフェイス102とともになり、監視装置22(図1)の許可されたユーザから、トラッカ・タグ識別データと資産との間のリンクおよび関連のリンク情報を選択的に受信することができる。同様に、ウェブ・サーバ98は、許可されたユーザから、資産とその資産に関連するエレメントとの間のリンクおよび関連するリンク情報を選択的に受信することができる。データ・ウェアハウス96は、ウェブ・サーバ98によって収集されたリンクおよびリンク情報を格納して、資産データおよびエレメント・データの生成のときに使用できるようにする。
【0075】
システム・コントローラ92は、追跡情報サーバ14の全体的な制御を提供し、そして、通信リンク94とともになり、トラッカ・タグ12の制御を提供する。全体的制御は、タグ・プロフィール中のプログラムされた命令を基にすることができる。タグ・プロフィール中のプログラムされた命令はシステム・コントローラ92に格納される。プログラムされた命令は、コマンドおよび制御情報を含む。タグ・プロフィールは、上述のように制御情報を含む。システム・コントローラ92は、クライアント通信インターフェイス102とともになり、監視装置22(図1)の許可されたユーザからコマンドおよび制御情報を選択的に受信して、プログラムされた命令および/またはタグ・プロフィールをコンフィギュレーションおよび/または編集する。
【0076】
記載した実施形態では、システム・コントローラ92は、コマンドおよび制御モジュール103およびタグ・プロフィール104を含む。コマンドおよび制御モジュール103は、追跡情報サーバ14の全体的制御のために、プログラムされた命令を処理し、そして、通信リンク94およびデータ通信ネットワーク18(図1)とともになり、コマンドおよび制御情報を通信することによって、トラッカ・タグ12(図1)の制御の処理を行う。全体的制御の幾つかの部分は、タグ・プロフィール104を基にし得る。タグ・プロフィール104に格納される情報は、事前に決定され、制御情報において提供され得る。あるいは、タグ・プロフィール104は、事前に決定され、永久に駐在し得る。別の代替例では、タグ・プロフィール104、またはタグ・プロフィール104内の或る情報を、追跡情報サーバ14および関連するトラッカ・タグ12(図1)の動作中にコンフィギュレーションおよび/または編集することができる。
【0077】
コマンドおよび制御モジュール103は、コマンドおよび制御情報を、タグ・プロフィールに対してのプログラムされた命令へとパッケージ化することができ、そのパッケージ化したものの中には監視装置22(図1)の認可されたユーザから与えられたコマンドおよび制御情報が含まれるものであり、そのパッケージ化は、トラッカ・タグ12(図1)と関連したeメール・アドレスへメッセージング・システム93(例えば、eメール・システム、テキスト・メッセージング・システムなど)を介して通信されるeメール・メッセージとするものである。メッセージは、トラッカ・タグ12(図1)により取り出せるように、追跡情報サーバ14内のメッセージング・システム93に格納することができる。代替例としては、メッセージは、独立したメッセージ・サービス・プロバイダからトラッカ・タグ12(図1)により取り出せるように、独立したメッセージ・サービス・プロバイダ(例えば、eメール・サービス・プロバイダ、テキスト・メッセージ・サービス・プロバイダなど)へ通信されることができる。
【0078】
記載した実施形態では、通信リンク94は、RFアンテナ105、無線送受信機106、および暗号化/解読プロセス108を含む。RFアンテナ105および無線送受信機106は、データ通信ネットワーク18(図1)を介してトラッカ・タグ12(図1)から位置/時間組合せデータを選択的に受信する。また、無線送受信機106およびRFアンテナ105は、コマンドおよび制御情報をトラッカ・タグ12(図1)へ送信する。暗号化/解読プロセス108は、オプションであり、追跡情報サーバ14によって送信または受信された任意のタイプの通信を暗号化および/または解読することができる。暗号化/解読プロセス108は、トラッカ・タグ12へのすべての通信を暗号化し、トラッカ・タグ12からのすべての通信を解読することができる。あるいは、暗号化/解読プロセス108を、トラッカ・タグ12から受信された位置/時間組合せデータの解読に限定することもできる。
【0079】
記載した実施形態では、データ・ウェアハウス96は、位置/時間組合せ記憶エリア110、タグ/資産/エレメント・リンク・テーブル112、データ・プロセッサ114、タグ・データ記憶エリア116、資産データ記憶エリア118、およびエレメント・データ記憶エリア120、データ・マイニング・プロセス122、およびレポート・プロセッサ124を含む。位置/時間組合せ記憶エリア110は、通信リンク94を介してトラッカ・タグ(図1)から位置/時間組合せデータを受信する。
【0080】
タグ/資産/リンク・テーブル112は、ウェブ・サーバ98によって収集されたリンクおよびリンク情報を格納する。トラッカ・タグ12から資産14へのリンクによって、データ・プロセッサ114は、位置/時間組合せデータを資産に関連付けることができるようになり、従って、資産データを生成することができるようになる。同様に、資産14から資産のエレメントへのリンクによって、データ・プロセッサ114は、位置/時間組合せデータをエレメントに関連付けることができるようになり、従って、エレメント・データを生成できるようになる。リンク情報は、資産またはエレメントに関連付けることができる記述的情報である。リンク情報には、資産およびエレメント・データの生成中にレポート・プロセッサからアクセス可能である。
【0081】
データ・プロセッサ114は、圧縮された位置/時間組合せデータ送信を圧縮解除するデータ解凍プロセスを含み得る。位置/時間組合せデータがXYZデータまたはXYデータを含んでいない場合、追跡情報サーバ14は、図1を参照して説明した生のGPS位置データおよび時間データから、関連するトラッカ・タグ12の位置データおよび時間データを解明するアルゴリズムを含む。解明アルゴリズムがトラック・タグ12で実行されると、上記と同様に、アルゴリズムは、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度および経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。アルゴリズムは、XYZデータまたはXYデータに関連する時間データも生成する。
【0082】
データ・プロセッサ114は、XYZデータまたはXYデータを算出するか否かにかかわらず、XYZデータまたはXYデータを用いて、資産の位置に関連するイベントを検出することができる。データ・プロセッサ114は、XYZデータまたはXYデータを、事前に決定されたXYZまたはXY座標の制限と比較して幾つかのイベントを検出する。位置に基づいてデータ・プロセッサ114によって検出できるイベントのタイプは、トラッカ・タグ12について上記で列挙したものと同じ例を含む。当然、更なるタイプの検出イベントも可能である。典型的には、検出されたイベントは、システム・コントローラ92へ通信され、それにより、システム・コントローラ92は、その検出されたイベントに応答して適したコマンドを通信することができる。典型的には、データ・プロセッサ114は、検出されたイベントのデータを、関連する位置/時間組合せデータとともに選択的に格納する。
【0083】
データ・プロセッサ114は、コントローラからの制御情報(即ち、タグ・プロフィール104中のプログラムされた命令)、タグ/資産/エレメント・リンク・テーブルからのリンク、および検出したイベントに基づいて、位置/時間組合せデータ、検出したイベントのデータ、およびリンク情報を選択的に処理して、タグ・データ、資産データ、および/またはエレメント・データを形成する。タグ・データは、タグ・データ記憶エリア116に格納される。資産データは、資産データ記憶エリア118に格納される。エレメント・データは、エレメント・データ記憶エリア120に格納される。データ・マイニング・プロセス122は、ウェブ・サーバ98によって要求されたデータに基づいてタグ・データ、資産データ、および/またはエレメント・データをマイニングして、1または複数のウェブ・ページを追跡情報で埋める。
【0084】
レポート・プロセッサ124はオプションである。レポート処理が実施されると、レポート・プロセッサ124は、タグ・データをタグ・レポートへ、資産データを資産レポートへ、エレメント・データをエレメント・レポートへと、選択的に処理する。レポート・プロセッサ124は、タグ・レポート、資産レポート、およびエレメント・レポートを格納するためにファイル・サーバ100へ通信する。例えば、タグ・レポートは、i)生のGPS位置データおよび時間データ、ii)XYZ位置データおよび時間データ、およびiii)検出したイベントのデータを含み得る。他のタイプのタグ・レポートも可能である。例えば、資産レポートのタイプは、i)資産ログ、ii)操作ログ、iii)オペレータ・ログ、iv)制限エリアでの位置および時間、v)危険エリアでの位置および時間、vi)進路外での位置および時間、v)高ストレス状態での位置および時間、vi)予期せぬ停止の位置および時間を含み得る。他のタイプの資産レポートも可能である。例えば、エレメント・レポートのタイプは、i)エレメント・ログ、ii)操作ログ、iii)オペレータ・ログ、iv)制限エリア内での位置および時間、v)危険エリアでの位置および時間、vi)進路外での位置および時間、v)高ストレス状態での位置および時間、vi)予期せぬ停止の位置および時間を含み得る。他のタイプのエレメント・レポートも可能である。
【0085】
特に、資産が航空機である場合、追跡情報サーバ14から入手可能な資産ログを、従来の航空機ログと交換するように調整することができる。同様に、操作ログを、従来の飛行操作ログと交換するために調整し、また、オペレータ・ログを、従来のパイロット・ログと交換するために調整することができる。別の航空機レポートは、航空機が4.27km(14,000フィート)を超えていた時間数または加圧されていた時間数を明らかにすることができる。更に、エレメントが航空機エンジンの燃料ポンプである場合、高ストレス状態レポートにおける位置および時間は、エンジンが高圧状態にさらされていた総時間数を明らかにすることができる。別の燃料ポンプ・レポートは、離陸および/または着陸、および関連の状態を明らかにすることができる。
【0086】
記載した実施形態では、ウェブ・サーバ98は、データ・アプレット126、マップ・アプレット128、マップ記憶エリア130、追跡情報モジュール132、タグ/資産/エレメント・リンク入力/編集モジュール134を含む。追跡情報モジュール132はウェブ・ページの組を含む。追跡情報モジュール132は、ウェブ・ページを介して監視装置22(図1)で、許可されたクライアント・ユーザに対して、1または複数のウェブ・ページを介して提示されたクライアント・ユーザの選択および要求に応じて追跡情報を提示する。
【0087】
マップ・アプレット128およびデータ・アプレット126は、許可されたクライアント・ユーザによる選択および要求に応答するウェブ・ベースのプログラムである。典型的には、追跡情報モジュール132は、マップ記憶エリア130から取り出されたマップ、マップ・アプレット128によってマップに重ね合わせた補足グラフィックス、およびデータ・アプレット126によって提供される補足テキストを介して、追跡情報を示す。マップは、追跡すべき資産のタイプに適した任意のマップとすることができる。例えば、マップ記憶エリア130は、道路地図136、航空地図(aviation map)138、水域地図(water map)140、鉄道地図142、および三次元(3D)環境のうちの1または複数のものを含み得る。他のタイプのマップを提供することもできる。
【0088】
マップ・アプレット128は、デフォルトでは、適切なウェブ・ページに航空地図138を提供して航空機を追跡できるようにする。ウェブ・ページによって、クライアント・ユーザは、異なるマップを選択することができる。クライアント・ユーザが異なるマップを選択すると、マップ・アプレット128は、選択されたマップを表示するようにウェブ・ページを変更する。同様に、データ・アプレット126は、何らかのタグ・データ、資産、および/またはエレメントのデータをデータ・ウェアハウス96から取り出し、それをデフォルトで所与のウェブ・ページに提供することができる。ウェブ・ページによって、クライアント・ユーザは、追加のまたは異なる追跡情報を選択することができる。その場合、データ・アプレット126は、それに応じて、クライアント・ユーザの選択および要求に応答する。
【0089】
マップおよびテキストの位置および時間の追跡情報とともに、データ・アプレット126は、データ・ウェアハウス96からXYZまたはXYの位置データおよび時間データを取り出す。XYZまたはXYの位置データは、マップ・アプレット128および追跡情報モジュール132へ提供される。マップ・アプレット128は、マップ上のXYZまたはXYの位置を表すアイコンを生成し、それを、追跡情報モジュール132へ提供されるマップ表示に重ね合わせる。複数のタイプのアイコンと、色、点滅、およびアイコンの他の適した属性を用いて、資産に関連する幾つかの状態を記号で表すことができる。当然、ウェブ・ページに組み込むことができる他の多くの特徴を実装して追跡情報を提供することもできる。
【0090】
図12に、幾つかのタイプのアイコンが重ねられたマップの例を示す。図12はテキスト情報を含んでいないが、XYZまたはXYの位置および時間をマップの適した位置に重ね合わせることもできる。更に、例えば一群の航空機や全ての飛行中の航空機を追跡するために、追加の資産のためのアイコンおよびデータをマップに重ねることができる。追跡情報モジュール132は、典型的には、マップ表示のパンやズームを可能とし、それにより、クライアント・ユーザが表示を特定の好みに調整できる。
【0091】
ウェブ・サーバ98は、典型的には、許可されたユーザがリンクおよびリンク情報をコンフィギュレーションすることを可能にする1または複数のウェブ・ページを含む。タグ・リンク入力/編集モジュール134は、1または複数のウェブ・ページとともに動作して、リンクおよびリンク情報を収集し、それをデータ・ウェアハウス96へ通信する。ウェブ・サーバ98は、典型的には、許可されたユーザがタグ・プロフィール104をコンフィギュレーションすることを可能にするウェブ・ページも含む。
【0092】
1組のウェブ・ページの中で、クライアント・ユーザは、典型的には、特定のタグ、資産、および/またはエレメントの監査追跡を提供するテキスト情報にアクセスすることができる。特に、資産をトラッカ・タグにリンクし、エレメントを資産にリンクする概念には、異なるトラッカ・タグおよび異なる資産にわたってリンクされる資産およびエレメントの履歴データを蓄積する利点がある。例えば、航空機上のトラッカ・タグが何らかの理由のために交換されると、資産とトラッカ・タグとの間のリンクが更新され、航空機の資産データは、最初のトラッカ・タグにより提供されるデータおよび新しいトラッカ・タグにより提供されるデータを含む。従って、航空機の履歴的な追跡情報およびレポートは総合的であり得る。同様に、航空機エンジン用の燃料ポンプがたまたま或る航空機から取り外されて別の航空機に取り付けられた場合、燃料ポンプのエレメント・データは、エレメントと資産との間のリンクが更新される限りは、包括的である。
【0093】
記載した実施形態では、ファイル・サーバ100は、タグ・レポート記憶エリア144、資産レポート記憶エリア146、エレメント・レポート記憶エリア148、およびファイル転送モジュール150を含む。ファイル転送モジュール150は、ウェブ・サーバ98からのレポートの要求に応答して、記憶域からタグ・レポート、資産レポート、および/またはエレメント・レポートを取り出す。典型的には、これは、ウェブ・ページを介したクライアント・ユーザからの選択または要求に応答してのものである。
【0094】
記載した実施形態では、クライアント通信インターフェイス102は、ネットワーク・インターフェイス152、インターネット・インターフェイス154、セキュリティ保護されていないエリア(unsecured area)156、およびセキュリティ・チェック158を含む。ネットワーク・インターフェイス152は、追跡情報ネットワークにおいて通信ネットワークへの標準のインターフェイスを提供する。例えば、ネットワーク・インターフェイス152は、LAN、無線LAN、地上電話ネットワーク、衛星システム、または他の任意の適した通信ネットワークへ接続することができる。インターネット・インターフェイス154は、インターネットへの任意のタイプの標準インターフェイスを提供する。追跡情報サーバ14への他の適したインターフェイスも可能である。監視装置22は、インターネット・インターフェイス154を介して追跡情報サーバへアクセスできることが好ましい。
【0095】
セキュリティ保護されていないエリア156は、追跡情報を提供しない。このエリアは、クライアント・ユーザにログイン・シーケンスを行うことを要求する。ログイン情報がセキュリティ・チェック158へ提供されると、そのクライアント・ユーザに対して、追跡情報を監視するためにウェブ・サーバに入ること、タグ・プロフィール104をコンフィギュレーションすること、またはリンクおよびリンク情報をコンフィギュレーションすることが許可されているか否かが判定される。セキュリティ保護されていないエリア156は、ウェブに基づくものとすることができ、追跡システムおよび/または追跡サービスを記述する情報を含み得る。
【0096】
図12を参照すると、監査装置22(図1)の表示の一部の例は、道路地図162を示す。イリノイ州シカゴ164を出発し、航空機は、ニューヨーク州ジェームズタウン166に到着する航空機である。追跡情報168を、シカゴからジェームズタウンを指す一連の矢印で示す。
【0097】
図12は、米国の一部を示すマップを示す。マップ中、シカゴからニューヨーク州ジェームズタウンへの矢印は、追跡システムへアクセスできるユーザに対して可視的に示される経路を示す。これによって、ユーザは、対象の飛行または地上車両の進行を常に追跡することができる。また、船舶を追跡するこうしたマップを提供することもできる。
【0098】
図13を参照すると、地域追跡システム170の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、PSTN32、インターネット36、セルラー電話ネットワーク172、セルラー電話/PSTNゲートウェイ174を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して説明したとおりである。
【0099】
追跡システム170の地域的な実施は、地域的な有効範囲(即ち地域的な通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、ワイヤレスの地上電話システムおよび陸線の地上電話ネットワークによって提供される。好ましいワイヤレス地上電話システムは、セルラー電話システムである。しかし、地域的な有効範囲を提供する他のワイヤレス地上電話システムを実装することもできる。好ましい地上電話ネットワークはPSTNである。しかし、他のタイプの地上電話ネットワークを実装することもできる。より具体的には、データ通信ネットワーク18(図1)は、セルラー電話ネットワーク172、セルラー電話/PSTNゲートウェイ174、およびPSTN32によって提供される。
【0100】
記載されている実施形態では、追跡情報ネットワーク20(図1)は、地上電話システムおよびインターネット36によって提供される。示されるように、好ましい地上電話システムは、陸線の電話システムである。しかし、地域的な有効範囲を提供する他の地上電話システムを地域追跡システム170に実装することもできる。より具体的には、追跡情報ネットワーク20(図1)は、PSTN32およびインターネット36によって提供される。
【0101】
図14を参照すると、ローカル追跡システム176の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、無線LAN178、無線LAN/LANハブ180、およびLAN182を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して説明したとおりである。
【0102】
追跡システム170のローカル的な実施は、ローカルな有効範囲(即ちローカルな通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、無線LAN178、無線/有線LANハブ180、および有線LAN182によって提供される。しかし、ワイヤレスのデータ通信を扱うのに適した他のローカル・ネットワークも可能である。追跡情報ネットワーク20(図1)は、有線LAN182によって提供される。しかしながら、データ通信を扱うのに適した他のローカル・ネットワークも可能である。
【0103】
本発明の一実施形態では、トラッカ・タグ12(図1)は、双方向無線を含み、航空機と動作可能に関連付けられる。トラッカ・タグは、GPS衛星からのデータ送信を受信する。航空機の位置は、GPSデータから決定することができる。更にトラッカ・タグは、少なくとも部分的にイリジウム衛星システムを介して無線信号を送信および受信する追跡情報サーバ14(図1)との間でのデータの送信および/またはコマンドの受信の能力を有する。トラッカ・タグは、航空機の翼または機体の高い側に取り付けられることが好ましい。自動車、トラック、船、列車などのような、他の形式の輸送機関の場合、トラッカ・タグは、視線上に空が位置するように、こうした車両および船の高い側に取り付けられることが好ましい。トラッカ・タグは、高地球周回軌道で周回するGPS衛星からGPSデータを受信し、XYZ座標(Xは緯度、Yは経度、Zは高度)でのトラッカ・タグの位置を決定する。
【0104】
更に、トラッカ・タグは、低地球周回軌道で周回するイリジウム衛星グループなどのような周回している別の衛星へ、トラッカ・タグの位置を通信するように事前にプログラムされたタスクでXYZ位置を送信することができる無線送信機および無線受信機を含む。本質的に、トラッカ・タグおよび機能をサポートするシステムは、地上(即ち、追跡システム・サーバ14(図1))からクエリ・ピング(query ping)を受信し、トラッカ・タグにピングを受信させ、通信衛星システムへ送信する文字列をトリガさせてXYZ位置をリアルタイムで報告する。反復されるピングに対して、信頼精度が約457.2mm(18インチ)という高精度の反復されるXYZ位置で応答する。プログラムされたタスクが、位置を絶えず報告することである場合、トラッカ・タグは、プログラムされた順序で、トラッカ・タグの絶えず続く位置および、従って、航空機、地上車両、または船舶の位置を報告する。
【0105】
こうした無線信号またはデータは、特定のトラッカ・タグを表すアイコンとして、テンプレートのマップおよびチャートに投影される座標の点として変換される。例えば、トラッカ・タグは、航空機、地上車両、および/または船舶の一意の番号および識別子を含む。
【0106】
暗号化およびデータ圧縮技術は、システムのセキュリティを維持すると同時に、加入したユーザおよび/または許可されたエンティティに対して「トラッカ」情報を受信するためのアクセスを与える。この場合も、ページャ、セルラー電話、PDAコンピュータ、インターネットで用いられているような、広範にわたって使用可能で信頼できる技術を用いることによって、この情報を、所望のセキュリティ・レベルで、有効に送信および受信することができる。
【0107】
トラッカ・タグおよびサポート・システムは、トラッカ・タグの視線上に空が位置する限り、世界中の何れもの一般の航空機、地上車両、または船舶の位置を提供する。視界上に空が位置しない場合、「トラッカ」データは、例えば航空機、地上車両、船舶が格納されている格納庫の前などのような、トラッカ・タグが視線上にさらされた最後の位置を反映する。「トラッカ」データは、「トラッカ」およびサポート・システムを備える任意の航空機、地上車両、または船舶のリアルタイムの任意の移動および位置を反映する。
【0108】
一実施形態では、トラッカ・タグは、離陸前にすべての一般の航空機に配置され、航空機に取り付けられたトラッカ・タグの一意の番号が、任意の飛行計画および航空機に関連する任意の飛行状態の報告に含まれる。
【0109】
トラッカ・タグは、システムにアセンブルされている場合、世界の何れにあっても航空機、地上車両、または船舶の位置および性能を追跡する能力を提供する3つの主なサブシステムを含んでいることが好ましい。サブシステムは、
1.電力生成および変換47(図7)、
2.データ収集および処理49(図7)、
3.データ通信リンク48(図7)、
に分類される。
【0110】
トラッカ・タグは、航空機の機体、地上車両、または船舶の上部へ直接に取り付けられるほど十分小さく、こうした形式の輸送機関の電気的および/または機械的システムの何れに対しても侵入しないものとする。トラッカ・タグは、航空機、地上車両、または船舶およびその操作パラメータに関係するすべてのデータを自動的に収集および処理する。完全に統合されたGPS受信機65(図7)は位置情報を提供し、それにより、正確な操作パラメータが収集されるようにする。データは、幾つかの手段を介した問い合わせのためにトラッカ・タグ内に格納される。トラッカ・タグは、追跡情報サーバへの直接的な連絡によって、所定のメンテナンス間隔でデータを転送する準備ができており、または、データは、幾つかのリモート・ワイヤレス・インターフェイスの1つを介してリアルタイムで収集される。これらのインターフェイスによって、広域またはローカル・エリアの接続が可能になる。
【0111】
要約すると、本発明の一部である顕著な特徴の一部は下記のようである。トラッカ・タグは、従来の技術とは異なり、その小さい外形、耐用年数、電力供給(太陽および圧電による電力生成およびバックアップ・バッテリ)、極度な状態での動作(−40度から最高+85度)に耐える能力、およびすべての高度での有効性を有するので、より大きいシステムに統合することができる装置である。
【0112】
トラッカ・タグは、GPSデータを受信し、通信衛星を介してページング技術を用いて位置および他のデータに応答すること及び/又はそれを報告することができる。こうした通信では、標準のパーソナル・コンピュータ、ページャ装置、ビデオ表示セルラー電話、またはウェブ対応ビデオPDAコンピュータを用いて表示することができるマップやチャートなどのようなビデオ・テンプレートに、位置を表示することができる。現在、システムは、マップ/チャートのXYZ座標に世界の任意の場所にあるトラッカ・タグの正確な位置を表示する目的のためのウェブ・サイトを用いることを、企図している(ただし、トラッカ・タグの「視線上」に空があり、通信(即ちRFの送信および受信)が妨害されないという条件がある)。
【0113】
追跡システムは、最新技術で位置をリアルタイムで提供するように、通信のためのGPSシステム、イリジウム衛星システム、地上電話システム、およびインターネット、および現在「最新」のデータベース・ストレージ(好ましくは、個々に設置され、商用化されているシステム)を、有利にかつシームレスに統合する。システムによって、ユーザ/加入者は、インターネット・アクセスを介して、一般に用いられているパーソナル・コンピュータまたは任意のデータ対応表示装置を用いて、正確な位置へリアルタイムでアクセスできるようになる。
【0114】
リアルタイムで(または、プログラムされたタスクにより要求されるように)蓄積された振動、位置、および報告データに関する飛行データ収集技術も、システムに統合することができる。例えば、燃料ポンプの状態および信頼性を予測するための経験データを蓄積するために、振動データ記録を収集および分析して、整備について決定することができる。同様に、追跡タグは、加速時計または別のタイプの振動センサを使用して、GPS技術と環境感知技術を統合することができる。一実施形態において、GPS、無線送受信機、およびトラッカ・タグの他のコンポーネントのための電力生成は、システムに対しての所望される独立性を提供する。つまり、トラッカ・タグは、航空機や、地上車両や、船舶上の受動的感知装置を介して幾つかの操作/環境パラメータのリアルタイムの通信を提供し、また航空機、地上車両、または船舶の位置を報告することができる。なぜなら、トラッカ・タグは、個別に電力供給されており、航空機、地上車両、または船舶、あるいはそのオペレータ/乗組員(即ち、スタッフ)の制御下にないからである。追跡システムに関連するデータは、通常の様々な装置(例えば、ページャ、セルラー電話、ワイヤレスPDAコンピュータなどにある典型的なディスプレイ)に表示することができ、インターネットを介してアクセス可能である。スケーラブルなコンピュータ・アーキテクチャおよび設計によって、システムは、複数のトラッカ・タグから受信(エンコード、暗号化、圧縮)されるすべてのデータを処理(データベースへの格納および分配)し、インターネットを介してユーザ/加入者のページャ、セルラー電話、および/またはPADコンピュータに対して個々に適合させた表示を作成することができるようになる。
【0115】
図15を参照すると、トラッカ・タグ12’の別の実施形態は、電源/電力変換モジュール47、データ通信リンク48’、およびデータ収集/処理モジュール49’を含む。電源/電力変換モジュール47は、図7を参照して上述したように動作する。データ収集/処理モジュール49’は、トラッカ・タグ12’の視線(見通し線)内にあるGPS衛星240(図3)から位置データおよび時間データを選択的に受信し、生のGPS位置データおよび時間データの処理を一般に図7を参照して説明したように行う。また、データ収集/処理モジュール49’は、一般的に図7を参照して説明したように、位置および時間組み合わせデータをデータ通信リンク48’へ選択的に通信する。データ通信リンク48’は、一般的に図7を参照して説明したように、データ通信ネットワーク18(図1)を介して位置および時間組み合わせデータを追跡情報サーバ14(図1)へ選択的に送信する。また、データ通信リンク48は、一般的に図7を参照して説明したように、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。
【0116】
記載した実施形態では、データ通信リンク48’は、RFアンテナ58、無線送受信機60、暗号化/解読プロセス62、およびネットワーク・プロセッサ63を含む。RFアンテナ58、無線送受信機60、暗号化/解読プロセス62は、図7を参照して上述したように動作する。ネットワーク・プロセッサ63は、最新のプログラムされた命令を伴う更新されたタグ・プロフィールを、追跡情報サーバ14(図1)から、例えば、電子メール・システム(例えば、POP3電子メール・サーバ)を介して受信するための通信を、選択的に開始する。また、ネットワーク・プロセッサ63は、位置および時間組み合わせデータを追跡情報サーバ14(図1)へ送信するための通信を選択的に開始する。上述のように、位置および時間組み合わせデータは、センサ・データも含むことができる。また、ネットワーク・プロセッサ63は、追跡情報サーバ14(図1)の許可されたユーザに対してページングを行って、特定の状態が生じたことを通知するための通信を、選択的に開始することができる。図7に示したトラッカ・タグ12では、こうした機能をコントローラ68(図7)のプロセッサ70(図7)に組み込むことができる。記載した実施形態では、ネットワーク・プロセッサ63をデータ通信の制御のために使用することにより、データ通信が必要でないときには、これをシャット・ダウンまたはスリープ状態に置くことができるようになる。これにより、トラッカ・タグ12’は、電力を節約し、電源50の寿命を延長する更に別の電力管理機能を組み込むことができるようになる。
【0117】
記載した実施形態では、データ収集/処理モジュール49’は、GPSアンテナ64、GPS受信機65、環境センサ66、制御装置67、およびコントローラ68’を含む。GPSアンテナ64、GPS受信機65、環境センサ66、および制御装置67は、図7を参照して上述したように動作する。コントローラ68’は、一般的に図7を参照して説明したように、位置、時間、およびセンサ・データの受信および処理を行う。また、コントローラ68’は、一般的に図7に示すように、位置および時間組み合わせデータをデータ通信リンク48’へ選択的に伝達する。
【0118】
図7を参照して上述したように、環境センサ66はオプションであり、1または複数の様々なタイプのセンサを含むことができ、様々なセンサには、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、電場(e−field)センサ、および他の定量化可能なパラメータを測定する能力のあるセンサが含まれる。従って、環境センサ66は、任意のタイプの1または複数のセンサの任意の組み合わせを表す。
【0119】
任意のセンサをコントローラ68’で使用して、イベントを検出し、続いてトラッカ・タグ12’の動作を変更することができる。同様に、コントローラ68’は、GPS衛星240からの位置データおよび/または時間データを使用して、イベントを検出し、続いて動作を変更することができる。検出されるイベントの幾つかのタイプには、ステートの変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が含まれる。更に、位置および時間組み合わせデータが追跡情報サーバ14(図1)へ送信されるときには、位置および時間組み合わせデータは、最後のデータ・ダウンロード以降の検出されたイベントに関係する位置、時間、およびセンサのデータを含むことができる。
【0120】
コントローラ68’は、ステート変化の状態を使用して、ネットワーク・プロセッサ63のウェイク・アップ(復帰)またはスタート・アップ(起動)を行い、それと共に命令を使用して、新しいタグ・プロフィールが追跡情報サーバ14(図1)の許可されたユーザによってコンフィギュレーションされているかどうかを検査することができる。新しいタグ・プロフィールが見つかった場合には、それがネットワーク・プロセッサ63によって取り出されてコントローラ68’へ通信される。コントローラ68’は、新たなタグ・プロフィールに含まれる新たなプログラムされた命令をインストールする。次いで、コントローラ68’は、その後のステート変化、データ収集、およびデータ・ダウンロードの状態に対する応答を、その現在のプログラムされた命令に従って行う。コントローラ68’は、データ収集の状態を使用して、センサデータ、位置データ、および/または時間データの収集および格納を、その現在のプログラムされた命令に従って行うことができる。コントローラ68’は、データ・ダウンロードの状態を使用して、ネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップを行い、それと共に命令を使用して、現在コントローラ68’によって格納されているデータとともに追跡情報サーバ14(図1)へダウンロードすることができる。データ・ダウンロードのための通信が確立された後、コントローラ68’は、格納されたデータををネットワーク・プロセッサ63へ通信し、ネットワーク・プロセッサ63はそれを追跡情報サーバ14(図1)へ渡す。
【0121】
記載した実施形態では、コントローラ68’は、センサ・プロセッサ71、記憶装置72、補助入力/出力(I/O)ポート74、および資産通信インターフェイス75を含む。センサ・プロセッサ71は、GPS受信機65、環境センサ66、制御装置67、記憶装置72、補助I/Oポート74、資産通信インターフェイス75、およびデータ通信リンク48と通信する。記憶装置72は、データ・バッファ76、トラッカ・タグ識別データ78、およびタグ・プロフィール79を含み、図7を参照して上述したように動作する。タグ・プロフィール79は、ステート変化、データ収集、およびデータ・ダウンロードの状態、ならびに、トラッカ・タグ12’が検出するようにプログラムされた様々な他のイベントに関連するコマンドおよび命令を含む。補助I/Oポート74は、図7を参照して上述したように動作する。適切なデータ収集の状態になると、センサ・プロセッサ71は、GPS受信機65から位置データおよび時間データを受信し、生のGPSの位置データおよび時間データを組み合わせて位置および時間組み合わせデータを形成し、その位置および時間組み合わせデータをデータ・バッファ76へ選択的に格納する。適切なデータ・ダウンロードの状態になると、センサ・プロセッサ71は、位置および時間組み合わせデータを、データ・バッファ76からデータ通信リンク48へ選択的に通信する。
【0122】
資産通信インターフェイス75はオプションであり、1または複数の資産/輸送手段のセンサから情報を受信して特定の環境的および/または動作的特性を監視し、1または複数の資産/輸送手段の制御装置へ情報を送信して、資産および/または輸送手段の動作の特定の側面を制御するように適合されている。資産/輸送手段のセンサからの情報は、トラッカ・タグ12’の動作に関連するステート変化の状態、データ収集の状態、データ・ダウンロードの状態、および他の検出されるイベントを識別するために、トラッカ・タグ12’で使用することができる。また、資産/輸送手段のセンサからの情報は、資産/輸送手段の制御の状態を識別するためにトラッカ・タグ12’で使用することができる。同様に、トラッカ・タグ12’は、センサ・データ、位置データ、および/または時間データを使用して、資産/輸送手段の制御の状態を識別することができる。トラッカ・タグ・プロフィール79は、資産/輸送手段の制御の状態に関連するコマンドおよび命令、ならびに、1または複数の資産/輸送手段のセンサによって検出されるイベントに基づくステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態に関連するコマンドおよび命令を含む。
【0123】
資産通信インターフェイス75は、様々な有線および/または無線技術を実装することができる。資産通信インターフェイス75は、有線によるものであるときは、センサ・プロセッサおよび資産/輸送手段内の対応する装置に対する通信プロトコルと互換性のある適切なコネクタおよびインターフェイス・アダプタを含む。同様に、資産通信インターフェイス75は、無線のものであるときは、センサ・プロセッサおよび資産/輸送手段内の対応する装置に対する通信プロトコルと互換性のある適切なインターフェイス・アダプタ、およびアンテナ/送受信機モジュールを含む。従って、資産通信インターフェイス75は、様々なタイプのシリアルまたはパラレル・バス(例えば、CANバス、USBなど)や、イーサネット(例えば、IEEE802.3、IEEE802.11など)や、Bluetoothを含む任意の適切なタイプの有線および/または無線技術を実装することができる。
【0124】
センサ・プロセッサ71は、図1を参照して上述した解明アルゴリズムを含み得る。解明アルゴリズムを用いると、センサ・プロセッサ71は、XYZデータまたはXYデータおよび関連する時間データを生成しながら、位置および時間組み合わせデータを一時的に格納する。XYZデータまたはXYデータ、および関連する時間データが生成されると、それらはデータ・バッファ76に格納され、対応する生のGPS位置データおよび時間データがパージされる。データ通信リンク48へ通信される位置および時間組み合わせデータは、生のGPS位置データおよび時間データの代わりに、XYZデータまたはXYデータおよび関連の時間データを含む。
【0125】
例えば、環境センサ66が振動センサまたは加速度計の形で実装されている場合、センサ・プロセッサ71は、振動センサによる振動測定値に関連するイベントを検出する。別の例では、センサ・プロセッサ71は、XYZデータまたはXYデータを用いて、資産の位置に関する更なるイベントを検出することができる。センサ・プロセッサ71は、XYZデータまたはXYデータを、タグ・プロフィール79のコマンドおよび制御情報で識別される事前に決定されたXYZ座標またはXY座標の制限と比較して、ステート変化、データ収集、データ・ダウンロード、および資産/輸送手段の制御の状態などの特定のイベントを検出する。より具体的には、センサ・プロセッサ71は、資産が、i)制限区域付近にあるとき、ii)制限区域内にあるとき、iii)危険区域付近にあるとき、iv)危険区域内にあるとき、v)中間地点にあるとき、vi)目的地にあるとき、vii)進路外にあるとき、viii)高ストレス状態に近いとき、ix)高ストレス状態を経験しているとき、x)高度が過度に低下しているとき、xi)高度が過度に上昇しているとき、xii)予期せぬ停止または著しい減速に遭遇しているとき、またはxiii)速度制限を超えているときに、それを検出することができる。こうしたタイプの検出されたイベントは、タグ・プロフィール79内で、ステート変化の状態、データ収集の状態、データ・ダウンロードの状態、および資産/輸送手段の制御の状態として、指定することができる。もちろん、更に別のタイプの検出されるイベントも可能であり、特に、環境センサ66(例えば、振動、温度、歪み、電圧、圧力、および電場のセンサ)および資産/輸送手段のセンサに関してのものが可能である。
【0126】
まとめると、センサ・プロセッサ71は、タグ・プロフィール79内部のプログラムされた命令で指定されるイベントを検出して、GPS位置データおよび時間データに関連するステート変化、データ収集、データ・ダウンロードの状態を識別する。更に、1または複数の環境センサ66が実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、ステート変化、データ収集、データ・ダウンロードの状態を識別する。同様に、資産通信インターフェイス75が、1または複数の資産/輸送手段のセンサから情報を受信するために実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、1または複数の資産/輸送手段のセンサに関連する更なるステート変化の状態、データ収集の状態、データ・ダウンロードの状態を識別する。更に、資産通信インターフェイス75が、資産/輸送手段の制御装置へ情報を送信するために実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、1または複数の環境センサ66および/あるいは1または複数の資産/輸送手段のセンサに関連する資産/輸送手段の制御の状態を識別する。
【0127】
典型的に、センサ・プロセッサ71は、ステート変化、データ収集、データ・ダウンロード、および資産/輸送手段の制御の状態などの検出されたイベントに関連する位置、時間、およびセンサのデータを選択的に格納する。この検出されたイベント・データの格納は、追跡に利用される任意の位置および時間組み合わせデータと共に行われる。振動に関連する検出されたイベントのように、センサ・プロセッサ71は、位置および時間に関連する任意の検出イベントを用いて、トラッカ・タグ12’が位置および時間データの受信を開始すべきか、位置および時間組み合わせデータの格納を開始すべきか、および位置および時間組み合わせデータの送信を開始すべきかを、決定する。更に、任意のタイプの検出されたイベントに関連するデータを、監視装置22(図1)で加入者/クライアント・ユーザへ提供される追跡情報に含めることができる。
【0128】
センサ・プロセッサ71は、データ通信リンク48’のネットワーク・プロセッサ63からコマンドおよび制御情報を受信する。ある実施形態では、ネットワーク・プロセッサ63は、コマンドおよび制御情報の受信を、電子メール・システム(例えば、POP3電子メール・サーバ)にログインし、トラッカ・タグ12’に関連する電子メール・アドレスへの電子メールを取り出すことによって行う。この実施形態では、コマンドおよび制御情報は、追跡情報サーバ14(図1)からの電子メール・メッセージに含まれる。この電子メール・メッセージは、監視装置22(図1)の許可されたユーザによって作成されたものである。電子メール・システムは、追跡情報サーバ14内のメッセージング・システム93でもよく、また、独立の電子メール・サービス・プロバイダを通したものでもよい。タグ・プロフィール79に格納される情報は、最初に予め決定することができる。電子メール・メッセージ内のコマンドおよび制御情報は、新しいタグ・プロフィール内のプログラムされた命令として提供することができる。新しいタグ・プロフィールは、ネットワーク・プロセッサ63によってセンサ・プロセッサ71へ通信される。センサ・プロセッサ71は、新しいタグ・プロフィールを、現在のタグ・プロフィール79内のプログラムされた命令の上に書き込むか又はマスクして、タグ・プロフィール79を電子メール・メッセージに基づいて更新することができる。
【0129】
センサ・プロセッサ71は、追跡情報サーバ14(図1)へのデータ送信および電力消費の管理を、ネットワーク・プロセッサ63が位置および時間組み合わせデータの送信およびプログラムされた命令を伴う新しいタグ・プロフィールに関する検査を行う時を制御することによって、行う。典型的には、センサ・プロセッサ71は、データ送信を、データ・ダウンロードの状態がネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップの前に検出されるのを待つことによって、バースト様式で制御する。次いで、データ送信が確認された後、センサ・プロセッサ71は、ネットワーク・プロセッサ63をスリープ状態にするかシャット・ダウンすることができる。更に、センサ・プロセッサ71は、好適には、新しいタグ・プロフィールに関する検査を、ステート変化の状態がネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップの前に検出されるのを待つことによって、制御する。次いで、センサ・プロセッサ63が、新しいタグ・プロフィールをセンサ・プロセッサ71へ提供した後、または新しいタグ・プロフィールが見つからなかったことを確認した後に、センサ・プロセッサ71は、再度、ネットワーク・プロセッサ63をスリープ状態に置くかシャット・ダウンすることができる。
【0130】
センサ・プロセッサ71は、それぞれの送信バーストを、トラッカ・タグ識別データ78とともにエンコードして、追跡情報サーバ14(図1)が、送信されたデータを適切なトラッカ・タグ12’と関連付けることができるようにする。検出された状態(またはイベント)に関連するセンサ、位置、および時間のデータも、データ・バッファ76に格納される。データ送信は、検出された状態に関連するセンサ、位置、および時間のデータを、追跡に使用される位置および時間組み合わせデータと共に含む。
【0131】
図16を参照すると、トラッカ・タグがパワー・アップ/リセットの状態に応答するプロセス200の一実施形態は、ステップ202で始まり、ここで、パワー・アップ/リセットの状態は、例えば、制御装置67(図15)のアクティブ化によって開始される。次に、ステップ204で、トラッカ・タグのセルフ・テスト(自己試験)が行われる。ステップ206で、プロセスは、セルフ・テストに合格したか失敗したかを判定する。セルフ・テストに合格した場合、プロセスは、セルフ・テストの完了を、セルフ・テスト合格イベントに基づくステート変化の状態として検出する(ステップ208)。逆に、セルフ・テストに失敗した場合、プロセスは、セルフ・テストの完了を、セルフ・テスト失敗イベントに基づくステート変化の状態として検出する(ステップ210)。ステップ208またはステップ210の後、プロセスは、タグ・プロフィール79(図15)に従って、ステート変化の状態に対してのプログラムされた命令を現在の実行する。
【0132】
図17を参照すると、トラッカ・タグがステート変化の状態に応答するプロセス220の一実施形態が、ステップ222で始まる。ステップ222では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。次に、ステート変化の状態が検出される(ステップ224)。1または複数のステート変化の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的に、ステート変化の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み(strain)、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、ステート変化の状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、ステート変化の状態の検出は、現在のタグ・プロフィールでのステート変化のパラメータを、対応するセンサからの測定値またはGPSの位置もしくは時間データと比較することによって、行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のステート変化のパラメータと比較してステート変化の状態を検出するためのアルゴリズムを含み、それには、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムが含まれる。
【0133】
ステップ226で、ステート変化の状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサは、ネットワーク・プロセッサをスタート・アップ(起動)する(ステップ228)。ステップ230で、ネットワーク・プロセッサは、追跡情報サーバからのトラッカ・タグに対する新しいプログラムされた命令を伴う新しいタグ・プロフィールを含む電子メール・メッセージを取り扱う役目の電子メール・システム(例えば、POP3電子メール・サーバ)との通信を、開始する。この電子メール・システムは、追跡情報サーバ14(図1)内のメッセージング・システム93とするこができ、また、独立の電子メール・サービス・プロバイダによって提供されるものでもよい。次に、プロセスは、ネットワーク・プロセッサと電子メール・システムとの間の通信が確立されていることを確認する(ステップ232)。通信が確認された場合、ステップ234で、ネットワーク・プロセッサは、トラッカ・タグに対する新しい電子メールがあるかどうかを検査する。次に、ネットワーク・プロセッサは、トラッカ・タグに対する新しいタグ・プロフィールがあるかどうかの判定を、新しい電子メールがあるかどうかに基づいて行う(ステップ236)。新しいタグ・プロフィールがない(即ち、新しい電子メールがない)場合、ステップ238で、ネットワーク・プロセッサは、電子メール・システムとの通信を終了する。次に、センサ・プロセッサは、ネットワーク・プロセッサをシャット・ダウンする(ステップ240)。ステップ242で、センサ・プロセッサは、スリープ状態に入る。次に、プロセスは、現在のタグ・プロフィール79(図15)に従って、ステート変化、データ収集、およびデータ・ダウンロードの状態に対するプログラムされた命令を実行する。
【0134】
ステップ232で、ネットワーク・プロセッサと電子メール・システムとの間の通信が確認されなかった場合、ネットワーク・プロセッサは、トラッカ・タグのデータ通信リンクをリセットし、ステップ230に戻って再試行する(ステップ246)。
【0135】
ステップ236で、新しいタグ・プロフィール(即ち、新しい電子メール)がある場合、ステップ248で、ネットワーク・プロセッサは新しいタグ・プロフィールをアップロードする。次に、ネットワーク・プロセッサは、電子メール・システムとの通信を終了する(ステップ238)。ステップ240で、ネットワーク・プロセッサが新しいタグ・プロフィールをセンサ・プロセッサへ通信した後、センサ・プロセッサはネットワーク・プロセッサをシャット・ダウンする。次に、センサ・プロセッサは、新しいタグ・プロフィールからの新しいプログラムされた命令を、センサ・プロセッサ71(図15)に関連する記憶装置72(図15)内部のタグ・プロフィール79(図15)へインストールする(ステップ249)。新しいプログラムされた命令は、対応するプログラムされた命令を上書きする。しかし、プログラムされた命令が新しいプログラムされた命令によって変更されなかった場合、そのプログラムされた命令が新しいプログラムされた命令によって削除すべきであると指定されない限り、そのまま残る。ステップ242で、センサ・プロセッサはスリープ状態に入る。次に、プロセスは、現在のタグ・プロフィール79(図15)(即ち、新しいプログラムされた命令を含む)に従って、ステート変化、データ収集、およびデータ・ダウンロードの状態に対するプログラムされた命令を実行する。
【0136】
ステート変化の状態を取り扱うためのプロセスの別の実施形態では、電子メール・システムの代わりに、テキスト・メッセージング・システムを使用することができる。更に別の実施形態では、電子メール・システムの代わりに、直通の双方向通信を使用することができる。
【0137】
ステート変化の状態を取り扱うためのプロセスの別の実施形態では、ネットワーク・プロセッサを、図17で言及したスタート・アップおよびシャット・ダウンの動作の代わりに、ステップ228でスリープ状態から復帰させ、ステップ240でスリープ状態に戻すことができる。更に別の実施形態では、ステップ226、228、240、および242が取り除かれ、ネットワーク・プロセッサおよびセンサ・プロセッサの双方が、プロセスの間、フルアップの動作(full up operation)を保つ。更に別の実施形態では、ステップ228および240が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサが単一のプロセッサに組み合わされる。この単一のプロセッサは、センサ・プロセッサのように、ステップ226でスリープ状態から復帰させ、ステップ242でスリープ状態に戻すか、または、プロセスの間はフルアップの動作を保たせることができる。
【0138】
図15、16、および17に関しては、例えば、トラッカ・タグ12’を、少なくとも定期的なステート変化の状態を作成するセルフ・テスト、および対応する定期的な電子メール・システムとの通信を定期的に行うように、プログラムすることができることに留意されたい。一実施形態では、追跡情報サーバ14(図1)は、
トラッカ・タグ12’の定期的なセルフ・テストの間隔内に、トラッカ・タグ12’への電子メールが、取り出されなかった場合に、トラッカ・タグ12’がシャット・ダウンされているか又は電子メール・システムとの通信ができないと判定することができる。従って、追跡情報サーバは、トラッカ・タグが電子メール・システムと通信中であることが期待されているときに通信していないという状況を、問題として識別し、保守要員がこの状況を調査できるようにすることができる。
【0139】
図18を参照すると、トラッカ・タグがデータ収集の状態に応答するプロセス250の一実施形態が、ステップ252で始まる。ステップ252では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。図17のステート変化の状態も完了していることが好ましい。次に、データ収集の状態が検出される(ステップ254)。1または複数のデータ収集の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的に、データ収集の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、データ収集の状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、データ収集の状態の検出は、現在のタグ・プロフィール内のデータ収集パラメータを、対応するセンサからの測定値またはGPS位置もしくは時間データと比較することによって行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のデータ収集パラメータと比較してデータ収集の状態を検出するためのアルゴリズムを含み、これには、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムが含まれる。
【0140】
ステップ256で、ステート変化の状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサは、現在のタグ・プロフィール内のプログラムされた命令に従って、センサ・データおよび/または位置および時間データの収集および格納を行う(ステップ258)。センサ・プロセッサは、センサ、位置、および時間のデータを、ローカルでの格納およびそれに続いての追跡情報サーバによる使用に適した情報に変換するためのアルゴリズムを含むことができる。例えば、上記の位置解明アルゴリズムは、生のGPS位置データをXYZデータまたはXYデータに変換する。
【0141】
ステップ260で、データ収集の状態が終わる。典型的に、これは、有効な測定値がセンサならびに/またはGPS位置および時間データから得られるように、単に、十分な時間が過ぎた後である。しかしながら、タグ・プロフィールは、データ収集の状態の終わりを、検出される様態で定義することができる。例えば、タグ・プロフィールは、温度が4.44℃(40°F)を越えてから4.44℃(40°F)を下回るまでの連続的なデータ収集のためのプログラムされた命令を含むことができる。データの収集および格納は、第1の条件が検出された後に始まり、第2の条件が検出されるまで続く。別の例では、タグ・プロフィールは、航空機の離陸(例えば、振動の測定)が検出された後の5分間のデータ収集を指定するプログラムされた命令を含むことができる。この例では、データ収集の状態は、例えば、ある振動測定値から検出され、5分経過した後に終わる。
【0142】
次に、センサ・プロセッサはスリープ状態に入る(ステップ262)。この時点から、プロセスは、別のデータ収集の状態が検出されると、ステップ254へ戻る。
データ収集の状態を取り扱うプロセスの別の実施形態では、ステップ256および262が取り除かれ、センサ・プロセッサは、プロセスの間はフルアップ動作を保つ。
【0143】
図19を参照すると、トラッカ・タグがデータ・ダウンロードの状態に応答するプロセス270の一実施形態が、ステップ272で始まる。ステップ257では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。図17のステート変化の状態も完了していることが好ましい。次に、データ・ダウンロードの状態が検出される(ステップ274)。1または複数のデータ収集の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的には、データ収集の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、データ・ダウンロードの状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、データ・ダウンロードの状態の検出は、現在のタグ・プロフィール内のデータ・ダウンロード・パラメータを、対応するセンサからの測定値またはGPSの位置データもしくは時間データと比較することによって、行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のデータ・ダウンロード・パラメータと比較してデータ・ダウンロードの状態を検出するためのアルゴリズムを含み、これは、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムを含む。
【0144】
ステップ276で、データ・ダウンロードの状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサはネットワーク・プロセッサをスタート・アップする(ステップ278)。ステップ280で、ネットワーク・プロセッサは、追跡情報サーバ14(図1)との通信を開始する。次に、プロセスは、ネットワーク・プロセッサと追跡情報サーバとの間の通信が確立されていることを確認する(ステップ282)。通信が確認された場合、ステップ284で、ネットワーク・プロセッサは、検出されたデータ・ダウンロードの状態に関連したページを受信するためのタグ・プロフィールのプログラムされた命令において識別される1または複数のユーザへ、ページを送る。典型的には、ページは、トラッカ・タグ、資産、およびデータ・ダウンロードの状態を識別する、ユーザに対してのテキスト・メッセージである。テキスト・メッセージのユーザへの送付は、追跡情報サーバによって、ページング・システムを介して行うことができる。次に、センサ・プロセッサは、記憶装置のデータ・バッファに格納されたセンサ、位置、および時間のデータをネットワーク・プロセッサへ通信し、ネットワーク・プロセッサは、格納されたデータを追跡情報サーバ14(図1)へダウンロードする(ステップ286)。ステップ288で、ネットワーク・プロセッサは、追跡情報サーバとの通信を終了する。次に、センサ・プロセッサは、ネットワーク・プロセッサをシャット・ダウンする(ステップ290)。ステップ292で、センサ・プロセッサはスリープ状態に入る。この時点から、プロセスは、別のデータ・ダウンロードの状態が検出されると、ステップ274に戻る。
【0145】
ステップ282で、ネットワーク・プロセッサと追跡情報サーバとの間の通信が確認されなかった場合、ネットワーク・プロセッサは、トラッカ・タグのデータ通信リンクをリセットし、ステップ280に戻って再試行する(ステップ294)。
【0146】
データ・ダウンロードの状態を取り扱うプロセスの別の実施形態では、ページング・システムの代わりにテキスト・メッセージング・システムを使用することができる。更に別の実施形態では、ページング・システムの代わりに電子メール・システム(例えば、POP3電子メール・サーバ)を使用することができる。更に別の実施形態では、ページング、テキスト・メッセージング、および電子メールのシステムの組み合わせを使用して、テキスト・メッセージをユーザへ送ることができる。更に別の実施形態では、ネットワーク・プロセッサが別々の通信を開始してテキスト・メッセージを送り、格納されたデータをダウンロードすることができる。この実施形態では、テキスト・メッセージを、追跡情報サーバの代わりに、ページング・システム、テキスト・メッセージング・システム、および/または電子メール・システムに関連する独立のサービス・プロバイダへ通信することができる。
【0147】
データ・ダウンロードの状態を取り扱うためのプロセスの別の実施形態では、ネットワーク・プロセッサを、図19で言及したスタート・アップ動作およびシャット・ダウン動作の代わりに、ステップ278でスリープ状態から復帰させ、ステップ290でスリープ状態に戻すことができる。更に別の実施形態では、ステップ276、278、290、および292が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサとの双方が、プロセスの間はフルアップ動作を保つ。更に別の実施形態では、ステップ278および290が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサとが単一のプロセッサへと組み合わされる。この単一のプロセッサは、センサ・プロセッサのように、ステップ276でスリープ状態から復帰させ、ステップ292でスリープ状態に戻すか、または、プロセスの間にフルアップ動作を保たせることができる。
【0148】
一実施形態では、トラッカ・タグ12’(図15)は、パワー・アップ/リセット状態プロセス200(図16)、ステート変化状態プロセス220(図17)、データ収集状態プロセス250(図18)、およびデータ・ダウンロード状態プロセス(図19)を含むことができる。このコンフィギュレーションでは、最初に、パワー・アップ/リセット状態プロセス200が行われ、次いで、第1のステート変化の状態が検出されると、ステート変化状態プロセス220が行われる。次に、データの収集および格納を行うためにデータ収集状態プロセス250が行われる。これに、格納されたデータをトラッカ・タグから追跡情報サーバへダウンロードするデータ・ダウンロード状態プロセス270が続く。
【0149】
典型的には、タグ・プロフィール内のプログラムされた命令は、第1のステート変化の状態を引き起こすセンサ・データ、位置データまたは時間データにより、第1のデータ収集状態および第1のデータ・ダウンロード状態が検出されるようにもされる、というものである。例えば、プログラムされた命令は、振動センサに関連して、エンジン停止状態(engine off)からエンジン動作状態(engine running)への移行があるとき、およびエンジン動作状態からエンジン停止状態への移行があるときに、ステート変化の状態が検出されるように、指定することができる。また、プログラムされた命令は、振動のステート変化の状態が検出されたとき、およびその後のエンジンが動作している間の10分毎に、位置データおよび時間データに関するデータ収集の状態が検出されるように、指定することができる。更に、プログラムされた命令は、振動のステート変化の状態が検出されたとき、およびその後のエンジンが動作している間の2時間毎に、格納されたすべてのデータについてのデータ・ダウンロードの状態が検出されるように、指定することができる。
【0150】
ステート変化の状態をデータ収集の状態よりも先に、そしてデータ収集の状態をデータ・ダウンロードの状態よりも先に処理する優先方式を実装してもよい。この優先方式は、更に、複数のステート変化の状態、複数のデータ収集の状態、および複数のデータ・ダウンロードの状態を、早い者勝ち(a first in time basis)で処理するようにすることができる。一実施形態では、複数のデータ収集の状態を並列で処理することができる。
【0151】
図20を参照すると、トラッカ・タグに対するタグ・プロフィールをコンフィギュレーションするプロセス300の一実施形態が、ステップ302で始まり、ここでは、あるユーザが監視装置22(図1)を用いて追跡情報サーバ14(図11)のセキュリティ保護されていないエリア156(図11)にログインしている。ステップ304で、このユーザは、「タグ・プロフィールをコンフィギュレーションする」という機能またはオプションを選択する。次に、追跡情報サーバは、セキュリティ検査を行って、このユーザに追跡情報サーバのこのエリアにアクセスする許可が与えられていることを確認する(ステップ306)。ステップ308で、追跡情報サーバは、このユーザにタグ・プロフィールをコンフィギュレーションする許可が与えられているかどうかを判定する。次に、このユーザにタグ・プロフィールをコンフィギュレーションする許可が与えられている場合、追跡情報サーバは、監視装置上でこのユーザへトラッカ・タグ選択表示を提供する(ステップ310)。そうでない場合、このユーザは許可されていないため、プロセスはステップ302へ戻る。ステップ312で、このユーザは、トラッカ・タグ、所望のトラッカ・タグに関連する資産、またはタグ・プロフィールをコンフィギュレーションする所望のトラッカ・タグに関連するエレメントを選択する。次に、追跡情報サーバは、選択されたトラッカ・タグに対するタグ・プロフィールを、タグ・プロフィール・コンフィギュレーション表示で、このユーザに提供する(ステップ314)。ステップ316で、ユーザは、タグ・プロフィールをコンフィギュレーションするために、所望のステート変化状態、データ収集状態、および/またはデータ・ダウンロード状態を選択する。次に、ユーザが、所望のステート変化状態、データ収集状態、および/またはデータ・ダウンロード状態を保存すると、タグ・プロフィール内のプログラムされた命令が更新される(ステップ318)。ステップ320で、追跡情報サーバは、選択されたトラッカ・タグへのメッセージを、新しくコンフィギュレーションされたタグ・プロフィール付きで生成する。次に、追跡情報サーバは、そのメッセージを選択されたトラッカ・タグへ送信する(ステップ320)。
【0152】
タグ・プロフィール・コンフィギュレーション・プロセスの追加の一実施形態では、ユーザは、複数のタグ・プロフィールが共通にコンフィギュレーションされるときに、ステップ312で、複数のトラッカ・タグ、資産、またはエレメントからなるどのような組み合わせも選択することができる。これは、例えば、同様または類似のクラスの資産に対するタグ・プロフィールを共通にコンフィギュレーションすべき状況である、一群の航空機、トラック、または他のタイプの輸送手段に関するタグ・プロフィールのコンフィギュレーションに、有用である。ステップ310のトラッカ・タグ選択表示は、タグ・プロフィールのコンフィギュレーションのための複数のトラッカ・タグの選択を簡単にするために、資産のクラスおよびエレメントのクラスを含むことができる。複数のタグ・プロフィールを共通にコンフィギュレーションするときには、ステップ322におけるメッセージは複数の対応するトラッカ・タグへ送信される。
【0153】
タグ・プロフィール・コンフィギュレーション・プロセスの一実施形態では、メッセージは、選択されたトラッカ・タグに関連する電子メール・アドレスへ、電子メール・システム(例えば、POP3電子メール・サーバ)を介して送られる電子メール・メッセージとすることができる。別の実施形態では、メッセージは、選択されたトラッカ・タグに関連するテキスト・メッセージング・アドレスへ、テキスト・メッセージング・システムを介して送られるテキスト・メッセージとすることができる。更に別の実施形態では、メッセージは、選択されたトラッカ・タグへの直接のデータ通信とすることができる。電子メールおよび/またはテキスト・メッセージングのシステムは、追跡情報サーバ内部にあってもよく、または独立のサービス・プロバイダによって提供されるものでもよい。
【0154】
図21を参照すると、タグ・プロフィール79、104に含まれるプログラムされた命令(即ち、コマンドおよび制御情報)の例が示されている。これは、タグ・プロフィールが格納されているのが追跡情報サーバ内であるか(即ち、タグ・プロフィール104)、対応するトラッカ・タグへのメッセージ内であるか、トラッカ・タグ内であるか(即ち、タグ・プロフィール79)にかかわらず、この例示的なタグ・プロフィール内の、トラッカ・タグの動作を対象とするプログラムされた命令を反映している。タグ・プロフィールは、追跡情報サーバの動作を対象とするプログラムされた命令を含むこともできるに留意されたい。好適には、追跡情報サーバの動作を対象とするどのようなプログラムされた命令も、対応するトラッカ・タグへのメッセージ内のタグ・プロフィールから、およびトラッカ・タグ内に格納されたタグ・プロフィール79から、取り除かれる。タグ・プロフィールのこの例では、次のシンタックス規則が使用される。即ち、1)アンパーサンド(#)で始まる行はコメントである、2)行の終わりはセミコロン(;)で識別される、3)変数はパラメータから2つのコロン(::)で区切られる、4)パラメータ・フィールドはコンマ(,)で区切られる。もちろん、タグ・プロフィールに対してどのような適切なシンタックスを採用してもよく、特に、スクリプト・ファイルに対する一般的なシンタックス規則を採用してもよい。このタグ・プロフィールは、GPSの位置および時間データを受信するためのGPS受信機、振動センサ、および温度センサを含むトラッカ・タグ向けにコンフィギュレーションされている。他の実施形態では、トラッカ・タグは、1または複数の振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサの任意の組み合わせを含むことができる。
【0155】
このタグ・プロフィールの行1は、トラッカ・タグID 123456789を識別している。これは、一意のトラッカ・タグIDであり、このタグ・プロフィールと、一致するトラッカ・タグID78(図7)を有する或るトラッカ・タグの個体とを関連付ける。
【0156】
行2〜13では、ステート変化の状態を6つ定義している。この例示的な実施形態では、位置(行3)または時間(行4)に関するステート変化の状態はない。振動に関するステート変化の状態が2つある。第1の振動のステート変化の状態は、エンジン停止状態からエンジン動作状態への移行として定義されている(行5)。第2の振動のステート変化の状態は、エンジン動作状態からエンジン停止状態へ移行し、その後10分間停止状態を保つこととして定義されている(行6、7)。上記のように、トラッカ・タグ内の加速度計は、エンジン動作状態に伴う振動とエンジン停止状態に伴う振動とを区別することができる。エンジンがある期間停止状態を保っているのを待つことにより、例えば、トラックのエンジンが燃料補給のために短期間シャット・ダウンされているのに過ぎないときに、ステート変化の状態が検出されないことを保証する。そのような待機期間を、追跡されている資産に適するように調節または除去することができる。こうしたタイプの振動のステート変化の状態は、例えば、トラッカ・タグが関連付けられている資産のエンジン時間の記録および/または移動の追跡を行うのに、有用である。
【0157】
温度に関するステート変化の状態が2つある。第1の温度のステート変化の状態は、温度が4.44℃(40°F)を越える上昇移行として定義されている(行8)。第2の温度のステート変化の状態は、温度が4.44℃(40°F)より下へ下降移行し、その後5分間以上4.44℃(40°F)未満を保つこととして定義されている(行9、10)。温度センサは、4.44℃(40°F)より上と4.44℃(40°F)未満を区別することができる。温度が或る期間4.44℃(40°F)未満を保つのを待つことにより、温度の許容可能な変動に対してステート変化の状態が検出されないことを保証する。もちろん、温度の上側および/または下側の閾値について他の値を選択することもでき、また、監視されている資産に適するように待機期間を調節または除去することもできる。こうしたタイプの温度のステート変化の状態は、例えば、冷却用の貨物コンテナ、トラック、および貨車を監視するのに有用である。
【0158】
セルフ・テスト(自己試験)に関するステート変化の状態が2つある。1つはセルフ・テスト合格の結果に対するものであり(行11)、もう1つはセルフ・テスト失敗の結果に対するものである(行12)。何れのステート変化の状態に対してもページング命令はない(行13)。ページング命令を、任意のまたはすべてのステート変化の状態に付け加えることも可能である。例えば、ユーザ456がトラッカ・タグID123456789に対して責任をもつ整備技術者である状況において、セルフ・テスト失敗のステート変化の状態が生じるとユーザ456に対してページングを行うように、ページング命令を付け加えることも可能である。
【0159】
行14〜27では、データ収集の状態を6つ定義している。位置、時間、振動、温度、セルフ・テスト合格、およびセルフ・テスト失敗のデータの収集および格納に関連するデータ収集の状態がある。それぞれのデータ収集の状態は、それが関係するステート変化の状態を識別し、特定のタイプのデータの収集および格納のための追加の命令を提供する。位置のデータ収集の状態(行15、16)は、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の10分毎と定義されている。言い換えると、第1の位置のデータ収集の状態が検出されるのは、エンジン動作状態への移行の際の振動のステート変化の状態が検出されるときである。次いで、追加の位置のデータ収集の状態の検出が、エンジン停止状態への移行の際の振動のステート変化の状態が検出されるまで、10分毎に行われる。別の位置のデータ収集の状態が検出されるのは、エンジン停止状態の際の振動のステート変化の状態が検出されたときである。時間のデータ収集の状態(行17、18)も、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の10分毎と定義されている。これにより、エンジンが動作中の位置および時間のデータの収集および格納が調整される。このデータは、エンジン時間を記録するため、および資産の移動を追跡するために有用である。
【0160】
振動のデータ収集の状態(行19、20)は、それぞれの振動のステート変化の状態の際と定義されている。また、振動のデータ収集の状態は、位置および時間のデータも振動データと共に収集および格納する、という命令を含む。温度のデータ収集の状態(行21、22)は、それぞれの温度のステート変化の状態の際、およびその後の温度が4.44℃(40°F)を越えている間の5分毎と定義されている。また、温度のデータ収集の状態は、位置および時間のデータも温度データと共に収集および格納する、という命令を含む。セルフ・テスト合格のデータ収集の状態(行23、24)は、それぞれのセルフ・テスト合格のステート変化の状態の際と定義されている。また、セルフ・テスト合格のデータ収集の状態は、位置および時間のデータもセルフ・テスト合格のデータと共に収集および格納する、という命令を含む。セルフ・テスト合格のデータは、テストされたトラッカ・タグのエレメントおよび対応する合格結果を識別する情報を含むことができる。セルフ・テスト失敗のデータ収集の状態(行25、26)は、それぞれのセルフ・テスト失敗のステート変化の状態の際と定義されている。また、セルフ・テスト失敗のデータ収集の状態は、位置および時間のデータもセルフ・テスト失敗のデータと共に収集および格納する、という命令を含む。セルフ・テスト失敗のデータは、テストされたトラッカ・タグのエレメントおよび対応する合格結果または失敗結果を識別する情報を含むことができる。何れのデータ収集の状態に対してもページング命令はない(行27)。ページング命令を任意のまたはすべてのデータ収集の状態に対して付け加えることも可能である。
【0161】
行28〜39では、3つのデータ・ダウンロードの状態および2つのページング命令を定義している。この例示的な実施形態では、位置(行29)、時間(行30)、およびセルフ・テスト合格(行35)に関するデータ・ダウンロードの状態ははない。振動、温度、およびセルフ・テスト失敗のステート変化の状態に関連するデータ・ダウンロードの状態がある。それぞれのデータ・ダウンロードの状態は、それが関係するステート変化の状態を識別し、かつ特定のタイプのデータのダウンロードについての追加の命令を提供する。振動のデータのダウンロードの状態(行31、32)は、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の8時間毎と定義されている。また、振動のデータ収集の状態は、すべての格納されたデータ(即ち、位置、時間、温度、セルフ・テスト合格、セルフ・テスト失敗)を振動データと共にダウンロードする、という命令を含む。温度のデータのダウンロードの状態(行33、34)は、それぞれの温度のステート変化の状態の際、およびその後の温度が4.44℃(40°F)を越えている間の5分毎と定義されている。また、温度のデータ収集の状態は、位置および時間のデータも温度データと共にダウンロードする、という命令を含む。セルフ・テスト失敗のデータのダウンロードの状態(行36、37)は、それぞれのセルフ・テスト失敗のステート変化の状態の際と定義されている。また、セルフ・テスト失敗のデータ・ダウンロードの状態は、位置および時間のデータもセルフ・テスト失敗のデータと共に収集および格納する、という命令を含む。
【0162】
データ・ダウンロードの状態に関する2つのページング命令がある。第1のページング命令は、データ・ダウンロードの状態すべてについてユーザ123に対してページングを行うこと、と指定している(行38)。ユーザ123は、例えば、トラッカ・タグID123456789の取り付けられた資産に関連する全ての活動の監視を割り当てられた者とすることができる。従って、新しい位置、時間、またはセンサのデータが追跡情報サーバへ提供されるときはいつでも、この適切な者に対するページングが行われ、それにより、その者は追跡情報サーバにログインして新しいデータを検査できる。次いで、この監視者は、適切な行動を取って、資産の更なる移動を調整することができる。第2のページング命令は、セルフ・テスト失敗のデータ・ダウンロードの状態についてユーザ456に対してページングを行うこと、と指定している(行39)。ユーザ456は、例えば、トラッカ・タグID123456789の保守を割り当てられた者とすることができる。従って、新しいセルフ・テスト失敗のデータが追跡情報サーバへ提供されるときはいつでも、この適切な者に対してのページングが行われ、それにより、その者は追跡情報サーバにログインして新しいデータを検出できる。次いで、この保守者は、適切な行動を取って、トラッカ・タグの更なる使用を調整し、その失敗の性質に基づいて保守のスケジュールを立てることができる。
【0163】
トラッカ・タグおよび追跡情報サーバを含む追跡システムに関して説明した様々な構成要素およびプロセスは、ハードウェア、ソフトウェア、データベース構造で、またはハードウェア、ソフトウェア、およびデータベース構造の適切な任意の組み合わせで、実装することができる。
【0164】
本発明は、例示的な実施形態とともに説明してきたが、多くの代替、変更、変形が当業者には明らかであることを理解されたい。従って、上記の説明における本発明の実施形態は、本発明の意図および範囲を限定するものではなく、例示的なものである。より具体的には、本発明は、本明細書に記載した例示的な実施形態すべての代替、変更、および変形を含むものとする。
【図面の簡単な説明】
【0165】
【図1】図1は、本発明を組み込んだ追跡システムの一実施形態のブロック図である。
【図2】図2は、本発明を組み込んだグローバル追跡システムの一実施形態のブロック図である。
【図3】図3は、地球の軌道上に複数の衛星を備えるGPS衛星コンステレーションを示す。
【図4】図4は、地球の軌道上に複数の衛星を備えるイリジウム衛星コンステレーションを示す。
【図5】図5は、様々な衛星コンステレーションの軌道高度を示す。
【図6】図6は、追跡システムの一実施形態の衛星通信の部分でのGPSデータの流れを示す。
【図7】図7は、トラッカ・タグの一実施形態のブロック図である。
【図8】図8は、トラッカ・タグの一実施形態の平面図を示す。
【図9】図9は、トラッカ・タグの一実施形態の平面図を示す。
【図10】図10は、トラッカ・タグの一実施形態の側面図を示す。
【図11】図11は、追跡情報サーバの一実施形態のブロック図である。
【図12】図12は、本発明の一態様による、道路地図および追跡情報を示す監視装置の表示の一部の一例を示す。
【図13】図13は、本発明を組み込んだ地域追跡システムの一実施形態のブロック図である。
【図14】図14は、本発明を組み込んだローカル追跡システムの一実施形態のブロック図である。
【図15】図15は、トラッカ・タグの別の実施形態のブロック図である。
【図16】図16は、パワー・アップ/リセット状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図17】図17は、ステート状態の変化に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図18】図18は、データ獲得状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図19】図19は、データ・ダウンロード状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図20】図20は、トラッカ・タグに関するステート変化の状態、データ獲得の状態、およびデータ・ダウンロードの状態をコンフィギュレーションし、そのコンフィギュレーションした状態をメッセージでトラッカ・タグへ送るための追跡情報サーバの動作の一実施形態のフロー・チャートである。
【図21】図21は、ステート変化の状態、データ獲得の状態、およびデータ・ダウンロードの状態に対するプログラムされた命令をもつ例示的なタグ・プロフィールである。
【技術分野】
【0001】
本出願は、2003年5月6日に出願されたPCT特許出願第PCT/US03/14483号の利益を主張するものであり、その開示を参照により本明細書に組み込む。更に、本出願は、PCT特許出願第PCT/US03/14483号の一部継続出願である。PCT特許出願第PCT/US03/14483号は、2002年5月7日出願の米国特許仮出願第60/378,283号の利益を主張するものである。
【0002】
本発明は、可動の資産を追跡するシステム、およびそのシステムを用いる方法に関する。本発明は、グローバル・ポジショニング・システム技術を用いて動作する追跡装置と、追跡情報を様々なタイプの補足的情報とともに加入者へ提供する追跡情報サーバとに関連する特定の用途を見い出し、特にそれを参照して本発明を説明する。しかしながら、本発明は他の用途、例えば、資産と関連する或る環境特性および動作特性の監視や、資産の或る動作の制御などのような用途に従うこともできることを、理解されたい。
【背景技術】
【0003】
旅客機および一部の一般航空機にトランスポンダおよび/またはブラック・ボックスを備えることは一般的である。トランスポンダおよび/またはブラック・ボックスは、航空機の位置および/または航空機内で行われる行動を記録する。こうしたシステムは、航空機の飛行および操作の情報を取得するには有用であるが、現在実施されている技術には欠点がある。こうした欠点には、地上走行および離陸から、飛行中の飛行パターン、そして着陸までの段階を含む飛行パターンの様々な段階にある航空機との間の対話のレベルが相対的に低いことなどがある。更にこうしたシステムは、通常、旅客機または航空機の電子インフラストラクチャに制御され、相互接続されている。こうした設計は、例えば侵入者が航空機を無認可で制御する場合などに、これらのシステムが無効になる可能性をもたらす。航空機および他の対象物の追跡に関連する一部の米国特許を以下に示す。
【0004】
モンロー(Monroe)の米国特許第6,545,601号は、地上の航空機用のセキュリティ/監視システムを開示し、このシステムは、航空機などのような商用の輸送機関の内部および外部の双方の重要な構成要素および重要なエリアを監視するための、ビデオ画像生成器、音声センサ、動作検知器、および火災/煙検出器を含む、戦略的に間隔をあけて配置した複数のセンサを組み込んである。捕捉されたデータおよび画像は地上のセキュリティ・ステーション(security station)へ送信され、モニタに表示され、また、「ブラック・ボックス」レコーダおよび地上の記録システムに記録される場合もある。複数の音声信号および画像信号は、画像の処理に必要な記録用および監視用のハードウェアを最低限に抑えるために、多重化され、分割スクリーン技術を用いて順序付けされる。
【0005】
ドイル(Doyle)の米国特許第6,519,529号は、カーゴ・トレーラの共同一慣輸送状態を追跡および監視するシステムを開示している。このシステムは、グローバル・ポジショニング・システム(GPS)・ユニットによって提供される情報に加えて、トレーラ上の様々なセンサの状態を監視する。GPSユニットは、トレーラの位置および速度を提供する。ホイール監視ユニットは、特に、ホイールの回転があるかどうかなどのような、トレーラのホイールの状況を提供する。アンチロック・ブレーキ・システムは、ホイール回転状況を示す信号情報を提供するために用いられる。また、独立したホイール回転センサもホイール回転状況を提供するために用いられる。コンピュータ・プロセッサは、ホイール回転状況、位置情報および速度情報を用いて、トレーラの共同一貫輸送の移動状況を決定する。
【0006】
キュラトロ(Curatolo)その他の米国特許第6,510,380は、近接して通信する少なくとも2つのシグナリング・ユニットと、シグナリング・ユニットの位置を識別する手段とを備えるセキュリティおよび追跡装置を開示している。一実施形態では、近接して通信する少なくとも2つのシグナリング・ユニットと、シグナリング・ユニットが事前に選択された距離を超える距離だけ離れたときにシグナリング・ユニットの位置を識別して自動的に送信する手段とを備えるセキュリティ及び追跡装置が提供される。好ましい実施形態では、人間、動物または有形資産の場所を突き止めるための方法が提供され、その方法は、人間、動物、または有形資産と接する、近接して通信する少なくとも2つのシグナリング・ユニットを提供するステップを備え、少なくとも1つのシグナリング・ユニットは小さくて隠されており、人間、動物、または有形資産にしっかりと取り付けられ、これらのシグナリング・ユニットは、監視ステーションに対してシグナリング・ユニットの位置を特定する手段を有する。この方法は更に、GPSシステムを参照することによってシグナリング・ユニットの位置を識別する手段を稼働させるステップと、監視ステーションへ前記の地理的位置を通知するステップとを含む。
【0007】
ドナー(Doner)の米国特許第6,490,523号は、機関車を管理する方法および装置を開示している。装置は、機関車インターフェイス、コンピュータ、GPS受信機、および発信器を含むオンボードの追跡システムを含み、コンピュータは、機関車の位置を決定して、その位置を発信器を介して送信するようプログラムされており、コンピュータは更に、機関車の計測値を取得して、それらを発信器を介して送信するようにプログラムされている。方法は、それぞれの機関車が機関車指定点から出発したときを判定するように、それぞれのオンボードのシステムを動作させるステップと、出発状態を判定し、機関車指定点に対応する時点で機関車位置メッセージをデータ・センタへ送信し、それぞれの機関車ごとにGPS位置データを同時に収集するようにオンボードのシステムを動作させるステップと、データ・センタで、機関車指定点に対応する機関車位置メッセージを収集して、機関車のローカル化したグループを決定するステップと、列車の代表的構成および先頭の機関車を識別するステップとを含む。
【0008】
ベーカー(Baker)の米国特許第6,339,397号は、取り付け板に取り付けられ.エンクロージャを含むポータブルの自蔵型追跡ユニットを開示し、中空の内部空洞が、GPS受信機、マイクロプロセッサ、および送信機を収納する。GPS受信機は追跡データを受信し、マイクロプロセッサは追跡データを処理してデータ・パケットにする。送信機は、データ・パケットを、中央データベースに送信するために、リモート受信局へ送信する。光電池は、追跡ユニットの電気構成要素へ電力を提供するバッテリを充電するために、エンクロージャ上に搭載されている。エンクロージャは、概して直交に配向された一対の垂直に配向された側板で設計されており、それにより、側板に設けられているソーラー・パネルが、広範な配向を通じて好ましい太陽光入射角を維持するようにする。送信機は、アンテナを備えるセルラー電話であり、エンクロージャ内に取り付けられるが、送信機の動作周波数の約4分の1の波長だけ、金属取り付け板および電気構成要素から離れて配置される。エンクロージャは、無線周波数および光の透過性の材料から構成され、それによって、アンテナおよびソーラー・パネルを、エンクロージャの中空の内部空洞内に収納することができる。この発明の方法では、追跡データは、セルラー電話を介してセルラー・サービス・プロバイダへ定期的に送信され、更に、データ・サービス・ビューロへ送信され、このデータ・サービス・ビューロは、インターネットを介して中央サーバ・コンピュータのデータベースへデータを送信する。中央サーバ・コンピュータは、情報をデコードし、インターネット上のウェブ・ページを介して顧客に対して、マップおよびレポートなどのようなインターフェイスおよび付加価値製品を提供する。
【0009】
現在、それぞれの一般航空機(米国内では約40万)は、現在所定の位置にあるトランスポンダ測位システムに自発的に遵守するよう要求されている。一般の航空機の3分の1が遵守しているにすぎない。他の3分の2は、トランスポンダを備えていないか、または他の理由により遵守していない。
【発明の開示】
【発明が解決しようとする課題】
【0010】
既存の技術の見直すと、例えば、飛行パターン中の航空機と地上局との間のインテリジェンスで対話型のサービス通信を向上させる追跡システムを作成すること、および、航空機と地上局との間の通信における独立性を保証することが望まれる。例えば航空機のアイドル時間、地上走行、および飛行中の任意のときに、一意の航空機番号で航空機を追跡する、信頼性が高く費用対効果が大きい方法を提供することが望まれる。また、上記のタイプの対話型サービス通信および独立した通信を、他の様式の交通、例えば、種々の形式の空路、地上、水路の運送などにも提供することが望ましいと思われる。
【課題を解決するための手段】
【0011】
一態様では、可動の資産を追跡し、追跡情報を監視装置へ提供するための装置が提供される。一実施形態では、装置は、グローバル・ポジショニング・システム衛星コンステレーションの複数のグローバル・ポジショニング・システム衛星から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグを含み、位置データは、受信したデータの発信元の各グローバル・ポジショニング・システム衛星の地球の中心に対する位置を表し、時間データは、位置データに関連する時刻を表し、トラッカ・タグは、可動資産の外部に沿って位置データおよび時間データの受信を容易にする場所に配置され、トラッカ・タグは、複数のグローバル・ポジショニング・システム衛星からの位置データを組み合わせ、組み合わされた位置データと時間データとをデータ通信ネットワークを介して選択的に送信するものであり、トラッカ・タグは、コマンドおよび制御情報を伴うメッセージを前記データ通信ネットワークを介して選択的に取り出すように適合され、トラッカ・タグは、資産に関連する設備からは操作不能であり、かつ、装置は、トラッカ・タグのコマンドおよび制御のための追跡情報サーバを含み、追跡情報サーバは、コマンドおよび制御情報を伴うメッセージをトラッカ・タグへメッセージング・システムを介して選択的に送信するように適合され、メッセージはトラッカ・タグへ宛てられており、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、追跡情報サーバは、組み合わされた位置データおよび時間データを、トラッカ・タグからデータ通信ネットワークを介して受信するように適合され、追跡情報サーバは、コマンドおよび制御情報を監視装置から追跡情報ネットワークを介して選択的に受信するように適合され、追跡情報サーバは、組み合わされた位置データおよび時間データを、プログラムされた命令ならびにコマンドおよび制御情報に基づいて選択的に処理して追跡情報を作成するように適合され、追跡情報は、資産に関連付けられ、監視装置に追跡情報ネットワークを介して選択的にアクセス可能である。
【0012】
別の態様では、追跡システムが提供される。一実施形態では、追跡システムは、可動の資産に関連する追跡情報を表示するための監視装置と、追跡情報を監視装置へ通信するために監視装置と通信する追跡情報ネットワークと、データ通信ネットワークと、グローバル・ポジショニング・システム衛星コンステレーションの複数のグローバル・ポジショニング・システム衛星から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグとを含み、位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球の中心に対する位置を表し、時間データは、位置データに関連する時刻を表し、トラッカ・タグは、可動の資産の外部に沿って位置データおよび時間データの受信を容易にする場所に配置され、トラッカ・タグは、複数のグローバル・ポジショニング・システム衛星からの位置データおよび時間データを組み合わせ、組み合わされた位置データおよび時間データをデータ通信ネットワークを介して選択的に送信するものであり、トラッカ・タグは、コマンドおよび制御情報をデータ通信ネットワークを介して選択的に取り出すものであり、かつ、装置は、トラッカ・タグのコマンドおよび制御のための追跡情報サーバを含み、追跡情報サーバは、コマンドおよび制御情報をトラッカ・タグへメッセージング・システムを介して選択的に送信し、メッセージはトラッカ・タグへ宛てられており、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、追跡情報サーバは、組み合わされた位置データおよび時間データを、トラッカ・タグからデータ通信ネットワークを介して受信し、追跡情報サーバは、コマンドおよび制御情報を監視装置から追跡情報ネットワークを介して選択的に受信し、追跡情報サーバは、組み合わされた位置データおよび時間データを選択的に処理して追跡情報を作成し、追跡情報は、監視装置にとって、追跡情報ネットワークを介して選択的にアクセス可能である。
【0013】
更に別の態様では、可動の資産に関連するセンサ・データの監視を追跡情報サーバと通信するトラッカ・タグを用いて行う方法が提供される。一実施形態では、方法は、a)トラッカ・タグを可動の資産に取り付けるステップを含み、トラッカ・タグは、可動の資産の外部に沿って、資産の通常の移動の間にトラッカ・タグの視線(見通し線)が空へアクセスする場所に配置され、トラッカ・タグは、資産に関連する装備からは動作させられず、トラッカ・タグは、トラッカ・タグの現在の動作を制御するプログラムされた命令を含むタグ・プロフィールがインストールされており、追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初はインストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含むものであり、かつ、方法は、b)マスター・タグ・プロフィールの再コンフィギュレーションを追跡情報サーバで行って次のタグ・プロフィールを作成するステップを含み、次のタグ・プロフィールは、トラッカ・タグの続いての動作を制御するプログラムされた命令を含むものであり、かつ、方法は、c)次のタグ・プロフィールをトラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップを含み、メッセージング・システムはトラッカ・タグへデータ通信ネットワークを介してアクセス可能であり、かつ、方法は、d)トラッカ・タグをパワー・アップする(電源を入れる)ステップと、e)ステート変化の状態をトラッカ・タグで検出し、ステート変化の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップとを含み、ステート変化の状態に対する応答は、次のタグ・プロフィールを伴うメッセージをメッセージング・システムから取り出すこと、および次のタグ・プロフィールをトラッカ・タグにインストールすることを含み、インストール後、次のタグ・プロフィールは、トラッカ・タグの現在の動作の制御のための、インストールされたタグ・プロフィールとなるものであり、かつ、方法は、f)データ収集の状態をトラッカ・タグで検出し、データ収集の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ収集の状態に対する応答は、トラッカ・タグに関連する1または複数のセンサ、資産に関連する1または複数のセンサ、および資産に関連する輸送手段に関連する1または複数のセンサのうちの少なくとも1つのセンサに関連するセンサ・データを収集および格納することを含むものであり、かつ、方法は、g)データ・ダウンロードの状態をトラッカ・タグで検出し、データ・ダウンロードの状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ・ダウンロードの状態に対する応答は、格納されたセンサ・データを追跡情報サーバへデータ通信ネットワークを介してダウンロードすることを含み、追跡情報サーバは、ダウンロードされたセンサ・データを処理してセンサ情報を作成し、センサ情報を追跡情報ネットワークを介して監視装置上に表示する。
【0014】
更に別の態様では、可動の資産の追跡を、追跡情報サーバと通信するトラッカ・タグを用いて行う方法が提供される。方法は、a)トラッカ・タグを可動の資産に取り付けるステップを含み、トラッカ・タグは、可動の資産の外部に沿って、資産の通常の移動の間にトラッカ・タグの視線が空へアクセスする場所に配置され、トラッカ・タグは、資産に関連する装置からは動作させられず、トラッカ・タグは、トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初はインストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含むものであり、方法は、b)マスター・タグ・プロフィールの再コンフィギュレーションを追跡情報サーバで行って次のタグ・プロフィールを作成するステップを含み、次のタグ・プロフィールは、トラッカ・タグの続いての動作を制御するプログラムされた命令を含むものであり、かつ、方法は、c)次のタグ・プロフィールをトラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップを含み、メッセージング・システムはトラッカ・タグにデータ通信ネットワークを介してアクセス可能であり、かつ、方法は、d)トラッカ・タグをパワー・アップするステップと、e)ステート変化の状態をトラッカ・タグで検出し、ステート変化の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップとを含み、ステート変化の状態に対する応答は、次のタグ・プロフィールを伴うメッセージをメッセージング・システムから取り出すこと、および次のタグ・プロフィールをトラッカ・タグにインストールすることを含み、インストール後、次のタグ・プロフィールは、トラッカ・タグの現在の動作の制御のためのインストールされたタグ・プロフィールとなり、かつ、方法は、f)データ収集の状態をトラッカ・タグで検出し、データ収集の状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ収集の状態に対する応答は、トラッカ・タグ内のグローバル・ポジショニング・システム受信機に関連する位置データおよび時間データを収集および格納することを含み、かつ、方法は、g)データ・ダウンロードの状態をトラッカ・タグで検出し、データ・ダウンロードの状態に対する応答を、インストールされたタグ・プロフィール内のプログラムされた命令に従って行うステップを含み、データ・ダウンロードの状態に対する応答は、格納された位置データおよび時間データを追跡情報サーバへデータ通信ネットワークを介してダウンロードすることを含み、追跡情報サーバは、ダウンロードされた位置データおよび時間データを処理して追跡情報を作成し、追跡情報を追跡情報ネットワークを介して監視装置に表示する。
【0015】
本明細書に記載された本発明の説明を読み、理解すると、当業者には本発明の利益および利点が明らかになる。
本発明は、1組の添付図面と関連して、より詳しく説明されている。
【発明を実施するための最良の形態】
【0016】
本発明は、添付図面と関連して説明するが、これらの図面は、本発明の実施形態の例を示すためのものであり、本発明をこうした実施形態に限定するためのものと解釈されるべきではない。本発明は、図面および関連の説明で提供されたもの以上に、様々な構成要素および構成要素の配置、および様々なステップおよびステップの構成で具体化することができることを理解されたい。図中、同様の参照番号は同様のエレメントを示す。
【0017】
図1を参照すると、追跡システム10の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、データ通信ネットワーク18、追跡情報ネットワーク20、監視装置22、およびGPS衛星コンステレーション24を含む。GPS衛星コンステレーション24は、地球の周りの軌道にのった複数のGPS衛星240(図3)を含む公共のGPS衛星コンステレーションであることが好ましい。各GPS衛星は、時計を含み、地球の中心に対してのそれ自体の軌道を把握している。各GPS衛星は、地球の中心に対するその位置および参照時間に対する時刻を、絶えずブロードキャストする。
【0018】
GPS衛星は、ユーザがGPS受信機で地球上または地球近くの各自の位置を突き止めることができることでよく知られている。こうしたシステムは一般に、航空、航海、自動車走行などのような、多くの異なる分野でのナビゲーションに用いられている。GPS衛星コンステレーション24は、十分なGPS衛星を含み、衛星は、地球の任意の点からみて4つのGPS衛星が地平線より上にあるように、離れて配置されることが好ましい。GPS受信機を備える機器は、4つのGPS衛星からの位置データおよび時間データから、地球の中心に対するその位置の経度、緯度、および高度を判定することができる。位置データおよび時間データが3つのGPS衛星から受信されると、機器は、その位置の経度および緯度を決定することができる。また、機器は、その位置データおよび時間データから、その速度を決定することもできる。
【0019】
1つの公共GPS衛星コンステレーションは、米国国防総省によって開発されたNAVSTAR GPS衛星コンステレーションである。NAVSTAR GPS衛星コンステレーションは、約19,300km(12,000マイル)で軌道にのっている27個のGPS衛星(24機が稼働、3機は予備)を含む。GPS衛星は、6つの面の対して分散しており、各面に少なくとも4つのGPS衛星を備えている。起動は、常に地球上のどこでも少なくとも4つのGPS衛星が地平線の上にあるように、定められる。GPS衛星コンステレーション24は、NAVSTAR GPS衛星コンステレーションであることが好ましい。しかし、追跡システム10は、ロシア連邦によって維持されているGLONASS衛星コンステレーションや、ヨーロッパ諸国によって導入されたGalileo衛星コンステレーションなどのような、他の任意の公共のGPS衛星コンステレーションとでも良好に作動する。GPS衛星コンステレーション24は、個人の衛星システムであってもよい。
【0020】
資産16は、航空機などのような可動の資産であることが好ましい。しかし、トラッカ・タグ12は、追跡情報を望まれる任意のタイプの資産に取り付けることができる。例えば、トラック、バン、自動車、貨物用コンテナ、トレーラ、バス、列車、機関車、軌道車、および船舶などである。トラッカ・タグ12は、そのトラッカ・タグからの視線上に通常は空が位置するように、資産16に取り付けられる。トラッカ・タグ12は、資産16の外部上側の最も高い点に取り外し可能に取り付けられることが好ましい。しかし、視線上に少なくとも3つまたは4つのGPS衛星が位置する任意の点が適する。高度の追跡情報が必要な場合は、少なくとも4つのGPS衛星へのアクセスが必要である。資産の通常の移動中にオペレータ、乗組員、または乗客がトラッカ・タグ12にアクセスできないように、トラッカ・タグ12は資産16上に配置されていることが好ましい。これによって、テロリストおよび他の敵がトラッカ・タグ12を取り外したり、無効にしたりできないようにすることができる。好適には、トラッカ・タグ12は、独立して電力供給され、資産から電気的に絶縁されており、追跡システム10の通常の動作中は手動の介入を必要としない。この特徴によっても、テロリストおよび他の敵がトラッカ・タグ12を無効にできないようにすることができる。しかしながら、代替例では、トラッカ・タグ12は、資産および/または資産と関連する輸送手段(transport vehicle)とインターフェースすることができる。このインターフェースは、資産/輸送手段のセンサから情報を受信するように、および/または、資産および/または輸送手段に関しての動作における或る状況を制御するように、適合される。例えば、トラッカ・タグ12は、資産および/または輸送手段の動作をディスエーブルにすること又はシャットダウンすることができる。
【0021】
トラッカ・タグ12は、視線上に空が位置する限り、GPS衛星コンステレーション24によって耐えずブロードキャストされるワイヤレス通信を選択的に受信する。ワイヤレス通信は、トラッカ・タグ12の視線内にある複数のGPS衛星240(図3)のそれぞれによって絶えずブロードキャストされる位置データおよび時間データを含む。トラッカ・タグ12は、複数のGPS衛星のそれぞれからの位置データおよび時間データを組み合わせて、位置/時間組合せデータ(combined position and time data)を形成する。トラッカ・タグ12は、データ通信ネットワーク18を介して追跡情報サーバ14と通信し、位置/時間組合せデータを追跡情報サーバ14へ選択的に送信する。好適には、データ通信ネットワーク18および追跡情報サーバ14に関して、トラッカ・タグ12は、TCP/IPプロトコルを用いるシン・クライアントである。
【0022】
トラッカ・タグ12は、追跡情報サーバ14からのコマンドおよび制御情報に基づいて位置データおよび時間データを受信するかどうかを決定する。同様に、トラッカ・タグ12は、追跡情報サーバ14からのコマンドおよび制御情報に基づいて位置/時間組合せデータを送信するかどうかを決定する。更に、トラッカ・タグ12は、位置および時間を受信するかどうかを決定するための事前にプログラムされた命令、および1またはそれ以上のオンボードのセンサを含むことができる。同様に、トラッカ・タグ12は、組み合わされた位置および時間のデータ(位置/時間組合せデータ)を送信するかどうかを決定するための事前にプログラムされた命令、およびオンボードのセンサを含むことができる。更に、トラッカ・タグ12は、1またはそれより多くの資産/輸送手段のセンサを、位置/時間組合せデータを送信するかどうかを決定するために、事前にプログラムされた命令とともに用いることもできる。トラッカ・タグ12は、位置データおよび時間データを受信し、位置/時間組合せデータを格納して、後にそれを送信できるようにする。オンボードのセンサが実施される場合、トラッカ・タグ12は、オンボードのセンサに関連するセンサ・データを、位置/時間組合せデータと共に格納することもできる。センサ・データは、位置/時間組合せデータの後の送信に含めることもできる。
【0023】
トラッカ・タグ12は、地球の中心を基準にしたそれ自体の位置について位置データおよび時間データを解明するアルゴリズムを含むことができる。アルゴリズムは、所望される追跡情報のタイプに応じて、三辺測量様式で、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度、経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。XYZデータまたはXYデータと関連する時間データも生成される。解明アルゴリズム(resolving algorithm)の分解度は、緯度(X)が約457.2mm(18インチ)、経度(Y)が約457.2mm(18インチ)、高度(Z)が約457.2mm(18インチ)である。解明アルゴリズムがトラッカ・タグ12に実装される場合、位置/時間組合せデータは、XYZデータまたはXYデータ、および関連する時間データを含む。一般に、解明アルゴリズムは、追跡情報サーバへ送信されるデータ量を減らす。トラッカ・タグ12は、データ送信に必要な時間量を更に低減するためにデータ圧縮プロセスを含むことができる。トラッカ・タグ12は、追跡情報サーバ14との安全な通信のために暗号化プロセスおよび解読プロセスを含み得る。別の代替例として、トラッカ・タグ12は、位置/時間組合せデータの送信を安全にするための暗号化プロセスを含むことができる。これは、テロリストおよび他の敵が位置/時間組合せデータを用いて資産の場所を突き止めたり、資産を標的としたりすることを防ぐことができる。
【0024】
トラッカ・タグ12と、資産16または資産と関連する輸送手段との間の通信はオプションであり、有線でも無線でもよい。トラッカ・タグ12とデータ通信ネットワーク18との間の通信はワイヤレスである。追跡情報サーバ14とデータ通信ネットワーク18との間の通信は、配線によるものが好ましい。しかし、この通信をワイヤレスとすることも可能である。データ通信ネットワーク18は、トラッカ・タグと追跡情報サーバ14との間の通信に適した無線および有線の通信技術の任意の組み合わせで実現することができる。データ通信ネットワーク18は、公共のネットワーク、私有のネットワーク、または公共ネットワークおよび私有ネットワークの任意の組み合わせとすることができる。
【0025】
例えば、データ通信ネットワーク18は、データ通信衛星システム、地上電話システム、ケーブル・テレビジョン・システム、コンピュータ・ネットワーク、および他の適したデータ通信ネットワークの1または複数のものを任意の組み合わせで含み得る。データ通信衛星システムは、衛星電話システムまたは私有衛星ネットワークを含み得る。衛星電話システムは、イリジウム(Iridium)衛星システム、グローバルスター(Globalstar)衛星システム、オーブコム(Orbcomm)衛星システム、インマルサット(Inmarsat)衛星システム、または他の任意の適した公共衛星電話システムなどのような、任意の公共衛星電話システムでよい。地上電話システムは、公衆交換電話網(PSTN)、広域帯統合サービス・デジタル通信網(ISDN)、デジタル加入者線(DSL)、セルラ式電話ネットワーク、パーソナル通信システム(PCS)・ネットワーク、または他の任意の適した地上電話ネットワークなどのような、地上通信線またはワイヤレスの電話システムの任意の組み合わせを含むことができる。コンピュータ・ネットワークは、有線ローカル・エリア・ネットワーク(LAN)および無線LANの任意の組み合わせを含むことができる。コンピュータ・ネットワークはEthernet(即ち、有線LANではIEEE802.3、無線LANではIEEE802.11)であることが好ましい。しかし、トークン・リング、光ファイバ分散データ・インターフェイス(FDDI)、ARCNET、およびHiperLANなどのような、他の任意の適したネットワーク通信プロトコルを備えることもできる。
【0026】
こうした様々な通信技術を任意の組み合わせで結合して、ワイド・エリア・ネットワーク(WAN)またはメトロポリタン・エリア・ネットワーク(MAN)を形成することができる。特に、トラッカ・タグ12とデータ通信ネットワークとの間のワイヤレス通信は、衛星、セルラー電話、PCS、無線LAN、または他の任意の適したワイヤレス技術によって実施することができる。
【0027】
追跡情報サーバ14は、コマンドおよび制御情報をトラッカ・タグ12へ選択的に提供し、トラッカ・タグ12から位置/時間組合せデータを受信する。追跡情報サーバ14は、位置/時間組合せデータを選択的に処理し、資産16の移動を監視するための特定の追跡情報を選択的に生成する。追跡情報サーバ14は、選択的に、監視装置22の許可されたユーザが追跡情報ネットワーク20を介して追跡情報へアクセスできるようにする。許可されたユーザとは、例えば、加入者、資産を監視するように任命された従業員、追跡情報サーバ14に関連するオペレータ/管理者などである。追跡情報サーバ14は、監視装置22の許可されたユーザからコマンドおよび制御情報を選択的に受信することもできる。好適には、追跡情報サーバ14は、TCP/IPプロトコルでのデータ通信ネットワーク18および追跡情報ネットワーク20を介したデータ通信との互換性がある。
【0028】
追跡情報サーバ14は、i)コマンドまたは制御情報をトラッカ・タグ12へ提供するか否か、ii)位置/時間組合せデータを処理するか否か、iii)追跡情報を生成するか否か、およびどのようなタイプの追跡情報を生成すべきか、iv)ユーザが許可されているか否か、v)追跡情報へ、許可されたユーザがアクセスできるようにするか否か、およびvi)許可されたユーザからコマンドまたは制御情報を受信するか否か、を決定するためのプログラムされた命令を含むことができる。プログラムされた他のタイプの命令も可能である。プログラムされた命令は、最初に、監視装置22の許可されたユーザによってコンフィギュレーションされ、編集され、そして/または補足されることができる。プログラムされた命令の中には、追跡システム10が資産16を追跡する間に、最初にコンフィギュレーションされ、編集され、補足されるものもある。
【0029】
コマンドは、トラッカ・タグ・コマンド、即ち、位置データおよび時間データの受信を開始させるコマンド、位置/時間組合せデータの送信を開始させるコマンド、位置/時間組合せデータの送信を停止させるコマンド、および位置データおよび時間データの受信を停止させるコマンドを含み得る。また、コマンドは、追跡情報サーバ・コマンド、即ち、位置/時間組合せデータの処理を開始させるコマンド、幾つかのタイプの追跡情報の生成を開始させるコマンド、幾つかのタイプの追跡情報の生成を停止させるコマンド、および位置/時間組合せデータの処理を停止させるコマンドも含む。他のタイプのコマンドも可能である。
【0030】
制御情報は、タグ・プロフィールと、トラッカ・タグから資産へのリンクと、資産からその資産に関連するエレメントへのリンクと、および資産またはその資産のエレメントと関連するリンク情報とを含むことができる。
【0031】
一般に、タグ・プロフィールは、追跡される資産のタイプ、および加入者によって契約が結ばれた追跡情報サービスに合わせて、作成される。タグ・プロフィールは、例えば、リアルタイム追跡、特定の検出されたイベントの際に行われる追跡、定期的な追跡、および/またはコマンドの際に行われる追跡を指定することができる。更に、タグ・プロフィールは、検出されたイベントに関連する閾値、推定された到着時間および/または移動経路の予測に関連するパラメータ、監視のために許可された追跡情報のタイプ、および許可された追跡情報レポートのタイプを含み得る。より具体的には、タグ・プロフィールは、i)監視すべき追跡情報および頻度、ii)始動およびシャットダウンに関連する振動の閾値、iii)通常の移動に関連する振動の閾値、iv)制限された区域、v)危険区域、vi)予定されたコース、vii)高ストレス状態、viii)燃料および燃料消費情報、およびix)処理すべきレポートおよびレポート頻度を含み得る。追加情報もタグ・プロフィールに含めることができる。
【0032】
典型的には、トラッカ・タグ12は、追跡情報サーバ14への通信に組み込まれるトラッカ・タグ識別データを含む。このようにして、特に複数のトラッカ・タグ12が追跡情報サーバ14と通信しているときに、追跡情報サーバ14は、位置/時間組合せデータを識別する。トラッカ・タグ12から資産14へのリンクによって、追跡情報サーバは位置/時間組合せデータを資産に関連付けることができるようになり、従って、追跡情報が資産を参照することができる。例えば、トラッカ・タグ識別データを航空機の尾翼番号にリンクすることができる。同様に、資産からエレメントへの追加のリンクによって、位置/時間組合せデータを資産のエレメントに関連付けることもできる。例えば、エレメントは、航空機エンジンの燃料ポンプとすることができる。第1のリンクは、トラッカ・タグ識別データを航空機の尾翼番号に関連付け、第2のリンクは、燃料ポンプのシリアル番号を航空機の尾翼番号に関連付けることができる。エレメントの更なる例としては、オペレータ、乗組員、乗客、資産の所有者、積載品目、操作機器項目、および支援機器項目などがある。他のタイプのエレメントも可能である。複数のエレメントを識別し、所与の資産にリンクすることができる。
【0033】
リンク情報は、リンクに関連する記述的情報であり、例えば、i)資産識別データ、ii)資産証明、iii)資産稼働情報、iv)資産メンテナンス情報、v)エレメント識別データ、vi)エレメント証明、vii)エレメント稼働情報、およびviii)エレメント・メンテナンス情報などである。他のタイプのリンク情報も可能である。
【0034】
追跡情報サーバ14またはトラッカ・タグ12におけるプログラムされた命令は、様々なタイプの制御情報の任意の組み合わせを含み得る。同様に、典型的に、コマンドは、プログラムされた命令に含められ、従って、或るイベントが検出されるとき又は或るシーケンスが行われるとき、コマンドを自動的に伝達することが可能である。
【0035】
追跡情報サーバ14は、位置/時間組合せデータに含まれる生のGPS位置データおよび時間データから、トラッカ・タグ12の位置データおよび時間データを解明するアルゴリズムを含み得る。解明アルゴリズムは、トラッカ・タグ12における解明アルゴリズムに関して上述したのと同様に、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度、経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。これにより、ユーザおよび/または追跡情報サービス・プロバイダによる選択に依存するもりであるが、トラッカ・タグ12または追跡情報サーバ14におけるXYZデータの解明が可能となる。また、このアルゴリズムは、XYZデータまたはXYデータに関連する時間データを生成する。解明アルゴリズムがトラッカ・タグ12により実行される場合、それを再び追跡情報サーバ14で行う必要はない。逆に、解明アルゴリズムがトラッカ・タグ12により実行されない場合、追跡情報サーバ14はXYZデータの解明を行わねばならない。追跡情報サーバ14は、圧縮された位置/時間組合せデータ送信を圧縮解除するデータ圧縮解除プロセスを含み得る。追跡情報サーバ14は、トラッカ・タグ12との安全な通信のために暗号化プロセスおよび解読プロセスを含み得る。別の代替例として、追跡情報サーバ14は、安全保護された位置/時間組合せデータ送信を解読するための解読プロセスを含むことができる。
【0036】
追跡情報ネットワーク20は、追跡情報サーバ14と監視装置22との間の通信に適した無線および有線の通信技術の任意の組み合わせを実装することができる。好適には、追跡情報ネットワーク20と追跡情報サーバ14との間の通信、および追跡情報ネットワーク20と監視装置22との間の通信は、何れも有線によるものが好ましい。しかし、こうした通信の何れかが無線、または両方が無線であってもよい。データ通信ネットワーク18と同様に、追跡情報ネットワーク20は、公共ネットワーク、私有ネットワーク、または公共ネットワークと私有ネットワークとの任意の組み合わせとすることができる。従って、データ通信ネットワーク18について上記で特定したネットワークも、追跡情報ネットワーク20において実施することができる。特に、追跡情報ネットワーク20はインターネットを含み得、インターネットは、上記で特定した主な通信システムのそれぞれを介してアクセス可能である。追跡情報ネットワーク20およびデータ通信ネットワーク18は互いにリンクされ、共通の追跡システム・ネットワークを形成することができる。
【0037】
監視装置22は、追跡情報サーバ14との通信および追跡情報の表示に適した任意のタイプの装置である。例えば、パーソナル・コンピュータ、ノートブック・コンピュータ、PDA、ワイヤレスPDA、セルラー電話、衛星電話、ページャ、または他の任意の適した表示装置である。好適には、追跡情報サーバ18は、適したセキュリティ手段を用いてインターネットに接続されているウェブ・サーバを介して追跡情報を提供する。従って監視装置22は、追跡情報を受信し、資産の動きを監視するために、インターネットにアクセスできることが好ましい。しかし、監視装置22と追跡情報サーバ14との間の通信に公共インターネットは必要ない。他の代替例は、私有ネットワークを介した通信、または公共ネットワークを介した1対1のダイヤルアップ型の通信を含む。
【0038】
トラッカ・タグ12と、資産16または資産16と関連する輸送手段との間のオプションの通信経路は、任意の適切な有線または無線の通信技術を介して実現することができる。例えば、トラッカ・タグ12は、資産16または輸送手段と関連する任意のタイプの適切な通信網または通信ポートに対するインターフェースを含むことができる。例えば、通信網または通信ポートは、種々のタイプのシリアルまたはパラレルのバス(例えば、コントローラ・エリア・ネットワーク(CAN)・バス、ユニバーサル・シリアル・バス(USB)など)や、イーサネット(R)(例えば、IEEE802.3(有線)、IEEE802.11(無線)など)や、ブルートゥース(Bluetooth)の技術を実装することができる。
【0039】
図1は、1つのトラッカ・タグ12および1つの監視装置22を備える追跡システム10を示すが、システムを、複数のトラッカ・タグおよび/または複数の監視装置を含むように拡張することができる。複数のトラッカ・タグの使用によって、ユーザは、1群の航空機またはすべての飛行中の航空機などのような、複数の資産を監視できるようになる。複数の監視装置の使用によって、複数のユーザが資産を監視できるようになる。例えば、貨物用航空機を、その貨物に関連する様々なユーザ、航空機の所有者、航空機燃料ポンプ製造業者、運送会社、および政府監督官庁によって監視することができる。当然、複数のトラッカ・タグおよび複数の監視装置の双方の使用は、更なるシナリオの組み合わせを提供する。
【0040】
好適には、追跡情報サーバ14は、一つの設備に収納される。しかし、複数の設備に分散して、互いにネットワーク化していてもよい。好適には、追跡情報サーバ14は、地上システムである。しかし、空挺プラットフォーム、船舶プラットフォームなどのような、他のタイプのプラットフォームも可能である。
【0041】
図2を参照すると、グローバル追跡システム26の実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、イリジウム衛星コンステレーション28、イリジウム衛星/PSTNゲートウェイ30、PSTN32、イリジウム衛星/インターネット・ゲートウェイ34、およびインターネット36を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して述べたとおりである。
【0042】
追跡システム26のグローバルな実施は、グローバルな有効範囲(即ち、世界的通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、衛星電話システムおよび地上電話ネットワークによって提供される。示したように、好ましい衛星電話システムは、イリジウム電話システムである。しかし、グローバルな有効範囲を提供する他の衛星電話システムをグローバル追跡システム26に実装することもできる。好ましい地上電話ネットワークはPSTNである。しかし、他のタイプの地上電話ネットワークを実装することもできる。より具体的には、データ通信ネットワーク18(図1)は、イリジウム衛星コンステレーション28、イリジウム衛星/PSTNゲートウェイ30、およびPSTN32によって提供される。
【0043】
記載した実施形態では、追跡情報ネットワーク20(図1)は、衛星電話システムおよびインターネット36によって提供される。示したように、好ましい衛星電話システムは、イリジウム電話システムである。しかし、グローバルな有効範囲を提供する他の衛星電話システムをグローバル追跡システム26に実装することもできる。より具体的には、追跡情報ネットワーク20(図1)は、イリジウム衛星コンステレーション28、イリジウム衛星/インターネット・ゲートウェイ34、およびインターネット36によって提供される。
【0044】
資産に取り付けられるトラッカ・タグ12のグローバルな有効範囲は、イリジウム衛星システムによって提供される。同様に、加入者/クライアント・ユーザによる監視装置での追跡情報へのグローバル・アクセスは、イリジウム衛星システムによって提供される。グローバル追跡システムの追加の実施形態では、グローバル・アクセスが必要ない場合、データ通信ネットワーク18がグローバルな有効範囲を提供する一方で、追跡情報ネットワーク20(図1)は、追跡情報サーバ14への地域的なアクセスまたはローカルなアクセスを提供する他の通信ネットワークを実装することができる。逆に、グローバル追跡システムの別の実施形態では、グローバル追跡が必要ない場合、追跡情報ネットワーク20がグローバルな有効範囲を提供する一方で、データ通信ネットワーク18(図1)は、資産の地域的またはローカルな追跡を提供する他の通信ネットワークを実装することができる。
【0045】
図3を参照すると、GPS衛星コンステレーション24は、地球37の周囲の軌道にのった複数のGPS衛星240を含む。
図4を参照すると、イリジウム衛星コンステレーション28は、平均高度670km(420マイル)の低地球周回軌道(LEO)で地球37の周囲の軌道にのった66個のイリジウム衛星280を含む。イリジウム衛星280は6つの軌道面にあり、軌道面当たり11個の衛星がある。イリジウム衛星システム内において、イリジウム衛星280は、イリジウム電話(即ち、無線送受信機または双方向無線)および地上通信線およびワイヤレス電話システムへのゲートウェイ、およびインターネットへのゲートウェイと通信する。特に、インターネット・ゲートウェイでは、イリジウム衛星システムは、インターネット・サービス・プロバイダ(ISP)である。イリジウム衛星システムを介した音声、データ、およびインターネットの世界的なサービスは、イリジウム衛星LLCによって提供される。
【0046】
図5を参照すると、データ通信衛星コンステレーションの軌道の例の高度を示している。イリジウム衛星コンステレーション28、オーブコム衛星コンステレーション40、テレデシック衛星コンステレーション41、グローバルスター衛星コンステレーション42、およびスカイブリッジ衛星コンステレーション43は、LEOで地球37の周囲の軌道にのっている。コンコルディア衛星コンステレーション44、Orblink衛星コンステレーション45、およびICO衛星コンステレーションは、中地球周回軌道(MEO)で軌道にのっている。NAVSTAR GPS衛星コンステレーション38およびグロナス衛星コンステレーション39は、より高い高度で地球の周囲の軌道にのっている。
【0047】
図5は、本特許出願の概念と関連して使用できる衛星コンステレーションの様々な軌道高度を示す。1または複数のこうした衛星システムの使用によって、本明細書に記載したように、意図した動作が得られる。
【0048】
図6を参照すると、追跡システム10の一実施形態では、GPSデータが、GPS衛星240から資産16(例えば、一般的な航空機など)上のトラッカ・タグ12へ流れる。トラッカ・タグ・データからのデータ送信は、イリジウム衛星280によって中継されて、イリジウム衛星/PSTNゲートウェイ28へ送られる。
【0049】
図6は特に、トラッカ・タグがデータをイリジウム衛星へ送信し、イリジウム衛星がこの情報を地上局へ送信することに注目しており、更にトラッカ・タグへ情報を提供するGPS衛星の使用が示されている。
【0050】
図7を参照すると、トラッカ・タグ12の一実施形態は、電源/電力変換モジュール47、データ通信リンク48、およびデータ収集/処理モジュール49を含む。電源/電力変換モジュール47は、電力をデータ通信リンク48およびデータ収集/処理モジュール49へ提供する。これによって、トラッカ・タグ12は、外部電源から独立して動作することができる。データ収集/処理モジュール49は、トラッカ・タグ12の視線内にあるGPS衛星240(図3)から位置データおよび時間データを選択的に受信し、生のGPS位置および時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータを選択的に格納する。データ収集/処理モジュール49は、位置/時間組合せデータをデータ通信リンク48へ選択的に通信する。データ通信リンク48は、データ通信ネットワーク18(図1)を介して位置/時間組合せデータを追跡情報サーバ14(図1)へ選択的に送信する。また、データ通信リンク48は、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。
【0051】
記載した実施形態では、電源/電力変換モジュール47は、電源50、バックアップ・バッテリ52、電力分配モジュール54、およびバッテリ充電器56を含む。電源50は、電力を電力分配モジュール54へ提供する。電源50は、圧電電力生成器(piezoelectric power generator)、太陽光集光パネル86(図8)、1次バッテリ、および他のタイプの適した電源の任意の組み合わせを含み得る。電力分配モジュール54は、適した電力がトラッカ・タグ12の様々なコンポーネントへ提供されるように、電力を調整する。電力分配モジュール54は、電力を、バッテリ充電器56、データ通信リンク48、およびデータ収集/処理モジュール49へ分配する。バッテリ充電器56は、充電電流をバックアップ・バッテリ52へ選択的に印加する。例えば、電源からの電力が少ない場合、バッテリ充電器56は、充電電流を印加しない場合がある。バックアップ・バッテリ52は電力を電力分配モジュール54へ選択的に提供する。例えば、電源からの電力が適切である場合、バックアップ・バッテリ52は、電力分配モジュール54へ電力を提供しない場合がある。
【0052】
記載した実施形態では、データ通信リンク48は、RFアンテナ58、無線送受信機60、および暗号化/解読プロセス62を含む。無線送受信機60およびRFアンテナ58は、データ通信ネットワーク18(図1)を介して位置/時間組合せデータを追跡情報サーバ14(図1)へ選択的に送信する。また、RFアンテナ58および無線送受信機60は、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。暗号化/解読プロセス62は、オプションであり、トラッカ・タグ12によって送信または受信された任意のタイプの通信を暗号化および/または解読することができる。暗号化/解読プロセス62は、追跡情報サーバ14へのすべての通信を暗号化し、追跡情報サーバ14からのすべての通信を解読することができる。あるいは、暗号化/解読プロセス62を、追跡情報サーバ14へ送信される位置/時間組合せデータの暗号化に限定することもできる。
【0053】
記載した実施形態では、データ収集/処理モジュール49は、GPSアンテナ64、GPS受信機65、環境センサ66、制御装置67、およびコントローラ68を含む。GPSアンテナ64およびGPS受信機65は、トラッカ・タグ12の視線内のGPS衛星240(図3)から位置データおよび時間データを選択的に受信する。コントローラ68は、生のGPS位置データおよび時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータを選択的に格納する。コントローラ68は、位置/時間組合せデータをデータ通信リンク48へ選択的に伝達する。
【0054】
環境センサ66はオプションである。実装されている場合、環境センサ66は、1または複数の加速度計を含むことができる。環境センサ66が、例えば、加速度計を含む場合、環境センサ66は振動を感知し、振動測定値をコントローラ68へ提供する。コントローラは、振動測定値と事前に決定されている閾値とを比較して、様々なタイプのイベントを検出する。例えば、振動測定値を用いると、コントローラは、i)資産16(図1)に関連する動力装置の起動、ii)動力装置のシャットダウン、iii)資産の移動の開始、iv)資産の移動の休止、v)資産の加速度の過度の増加、vi)資産の加速度の過度の低下を検出することができる。典型的には、コントローラ68は、検出されたイベント・データを、関連する位置/時間組合せデータとともに選択的に格納するものであり、位置/時間組合せデータを後に送信するとき、その送信に、検出されたイベント・データを含めることができる。また、環境センサ66は、他のタイプの環境状態を感知することもできる。例えば、環境センサは、1以上の温度センサ、1以上のひずみゲージ、および1以上の他のタイプの環境センサ、例えば、電圧、圧力、電界(eフィールド)、他の定量化が可能なパラメータなどを感知するセンサを含むこともできる。環境センサ66は、1つの任意のタイプのセンサ又は複数の任意のタイプのセンサの組み合わせを表す。
【0055】
コントローラ68は何れのセンサも用いることができ、そのセンサを用いてイベントを検出し、その後にトラッカ・タグ12の動作を変更する。同様に、コントローラ68はGPS衛星240からの位置/時間組合せデータを用いることができ、そのデータを用いて時間および/または位置と関連したイベントを検出し、その後にトラッカ・タグの動作を変更する。更に、位置/時間組合せデータが追跡情報サーバ14(図1)へ送られるとき、その送信には、トラッカ・タグ12と関連する任意のセンサからのセンサ・データを含むことができ、特には、センサ・データまたは位置/時間組合せデータと関連する検出されたイベント・データを含むことができる。
【0056】
コントローラ68は、検出されたイベントを用いて、トラッカ・タグ12が位置データおよび時間データの受信を開始すべきか否か、位置/時間組合せデータの格納を開始すべきか否か、位置/時間組合せデータの送信を開始すべきか否を決定することができる。例えば、コントローラ68は、トラッカ・タグ12に、航空機が離陸すると位置データおよび時間データの受信および位置/時間組合せデータの格納を開始させ、航空機が移動を開始すると位置/時間組合せデータの送信を開始させ、事前に決定された時間の後にその送信を停止させ、航空機が乱気流に遭遇すると送信を再開させ、事前に決定された時間の後に送信を再度停止させ、航空機が移動を停止すると位置データおよび時間データの受信を停止させ、航空機が移動を停止すると送信を再開させ、格納されたすべての位置/時間データが送信されると送信を停止させる、ようにすることができる。
【0057】
制御装置67はオプションであり、トラッカ・タグ12の手動の起動およびシャットダウンを提供する。制御装置67は、意図した目的に適した任意のタイプのスイッチまたはコントロールとすることができる。制御装置67は、コントローラ68、および電源/電力変換モジュール47と通信する。制御装置67を起動すると、電源50がイネーブルにされ、コントローラ68は、順序立ってパワーアップ・シーケンスを開始する。シャットダウンが開始されるとき、コントローラ68は、順序立ってシャットダウン・シーケンスを開始し、適当なときに、電源50をディスエーブルにする。
【0058】
記載した実施形態では、コントローラ68は、プロセッサ70、記憶装置72、および補助入力/出力(I/O)ポート74を含む。プロセッサ70は、GPS受信機65、環境センサ66、制御装置67、記憶装置72、補助I/Oポート74、データ通信リンク48と通信する。記憶装置72は、データ・バッファ76、トラッカ・タグ識別データ78、およびタグ・プロフィール79を含む。プロセッサ70は、GPS受信機65から位置データおよび時間データを受信する。プロセッサ70は、生のGPS位置データおよび時間データを組み合わせて位置/時間組合せデータを形成し、その位置/時間組合せデータをデータ・バッファ76に選択的に格納する。プロセッサ70は、位置/時間組合せデータを、データ・バッファ76からデータ通信リンク48へ選択的に通信する。
【0059】
プロセッサ70は、図1を参照して上述した解明アルゴリズムを含み得る。解明アルゴリズムを用いると、プロセッサ70は、XYZデータまたはXYデータおよび関連する時間データを生成しながら、位置/時間組合せデータを一時的に格納する。XYZデータまたはXYデータ、および関連する時間データが生成されると、それらはデータ・バッファ76に格納され、対応する生のGPS位置データおよび時間データがパージされる。データ通信リンク48へ通信される位置/時間組合せデータは、生のGPS位置データおよび時間データの代わりに、XYZデータまたはXYデータおよび関連の時間データを含む。
【0060】
環境センサ66が実装された場合、プロセッサ70は、上述の振動センサによる振動の測定および/または種々の他のタイプのセンサによる他のタイプの測定(即ち、温度、ひずみ、電圧、圧力、電界)に関連するイベントを検出する。プロセッサ70は、XYZデータまたはXYデータを用いて、資産の位置に関連する更に別のイベントを検出することができる。プロセッサ70は、XYZデータまたはXYデータを、事前に決定されたXYZ座標またはXY座標の制限と比較して、幾つかのイベントを検出する。例えば、プロセッサ70は、資産が、i)制限区域付近にあるとき、ii)制限区域内にあるとき、iii)危険区域付近にあるとき、iv)危険区域内にあるとき、v)中間地点にあるとき、vi)目的地にあるとき、vii)進路外にあるとき、viii)高ストレス状態に近いとき、ix)高ストレス状態を経験しているとき、x)高度が過度に低下しているとき、xi)高度が過度に上昇しているとき、xii)予期せぬ停止または著しい減速に遭遇しているとき、またはxiii)速度制限を超えているときに、それを検出することができる。更に別のタイプの検出イベントも可能である。
【0061】
典型的に、プロセッサ70は、検出されたイベント・データを、関連する位置/時間組合せデータとともに、選択的に格納する。振動に関連する検出イベントのように、プロセッサ70は、位置および時間に関連する任意の検出イベントを用いて、トラッカ・タグ12が位置データおよび時間データの受信を開始すべきか否か、位置/時間組合せデータを格納すべきか否か、また位置/時間組合せデータを送信すべきか否かを決定することができる。更に、任意のタイプの検出されたイベントを、監視装置22(図1)で加入者/クライアント・ユーザへ提供される追跡情報に含めることができる。
【0062】
プロセッサ70は、データ通信リンク48からコマンドおよび制御情報を受信する。一実施形態では、プロセッサ70は、メッセージング・システム(例えば、ポイント−オブ−プレゼンス3(POP3)eメール・サーバなどのようなeメール・システム、テキスト・メッセージング・システムなど)へログインして、トラッカ・タグ12と関連するアドレスへメッセージを取り出すことにより、コマンドおよび制御情報を受信する。この実施形態では、コマンドおよび制御情報は、追跡情報サーバ14(図1)からのメッセージに含まれる。メッセージは、監視装置22(図1)の認可されたユーザにより作られている。メッセージング・システムは、追跡情報サーバ14(図1)の中にあってもよく、また、独立のeメール・サービス・プロバイダを通じてのものでもよい。タグ・プロフィール79に格納される情報は、事前に決定し、制御情報で提供することができる。あるいは、タグ・プロフィール79は、事前に決定し、記憶装置72に永久的に常駐していてもよい。別の代替例では、タグ・プロフィール70、またはタグ・プロフィール70内の或る情報を、トラッカ・タグ12の動作中にコンフィギュレーションおよび/または編集することができる。
【0063】
プロセッサ70は、位置/時間組合せデータがデータ・バッファ76から通信リンク48へ通信されるときにそれを制御することによって、追跡情報サーバ14(図1)へのデータ通信を管理する。典型的には、プロセッサ70は、1グループの位置/時間組合せデータがデータ・バッファ76に蓄積されるのを待つことによって、バースト様式でデータ通信を制御する。これは、コマンド、制御情報、および/またはタグ・プロフィール79を基にし得る。プロセッサ70は、トラッカ・タグ識別データ78と共にそれぞれの送信バーストをエンコードし、それによって、追跡情報サーバ14が、送信されたデータを適切なトラッカ・タグ12に関連付けることができるようにする。イベント・データは典型的にはデータ・バッファ76に格納される。また、送信バーストは、バーストに含まれる位置/時間組合せデータに関連するイベント・データを含むこともできる。
【0064】
一実施形態では、プロセッサは、データ通信ネットワーク18(図1)内で公共データ通信システムを介した仮想私有ネットワーク(VPN)の接続を維持するために、送信バースト間のタイミングを制御する。例えば、公共データ通信システムは、イリジウム衛星システム、同様の衛星システム、またはVPNを提供する任意のタイプの無線電話システムとすることができる。プロセッサ70は、追跡システム10(図1)がリアルタイム追跡情報を提供することができるように、送信バースト間のタイミングを制御することができる。あるいは、プロセッサ70は、データ通信ネットワークを介した送信時間を最低限に抑えるためにタイミングを制御することができる。従って、接続時間に対して料金を請求する公衆電話網や他のキャリヤーの通信コストを最低限に抑える。別の代替例として、プロセッサ70は、送信開始コマンドがデータ通信ネットワークを介して受信されるまで、送信バーストを遅らせることができる。典型的には、プロセッサ70は、送信バーストの受信通知がデータ通信ネットワーク18(図1)を介して受信されるまで、各送信バーストに関連するデータ・バッファに位置/時間組合せデータを維持する。
【0065】
補助I/Oポート74はオプションであり、コンピュータ装置をトラッカ・タグ12へ直接接続するポートを提供する。例えば、コンピュータ装置を用いて、トラッカ・タグのメンテナンスを行ったり、データ・バッファ76から位置/時間組合せデータをダウンロードすることができる。コンピュータ装置は、パーソナル・コンピュータ、ノートブック・コンピュータ、PDA、または同様の装置とすることができる。
【0066】
図8〜10を参照すると、トラッカ・タグ12の一実施形態は、涙形状のハウジング80を有する。ハウジング80には、2つの空気運動パワー/ファン・チューブ(air movement power/fan tube)82が備えら、チューブの一部の内側にパワー気流レバー(power airflow lever)84を備える。太陽光集光パネル86は、ハウジング80の上部に固定されている。パワー気流レバー84および太陽光集光パネル86は、電力を生成し、補助電源(図50)(図7)として働く。トラッカ・タグ12の前縁部88に垂直の気流90は、パワー気流レバー84を稼働させて電力を生成する。太陽光集光パネル86は、光から電力を生成する。
【0067】
図9を参照すると、記載した実施形態では、電源/電力変換モジュール47、データ通信リンク48、およびデータ収集/処理モジュール49が、ハウジング80の上部を取り除いた状態で示されている。
【0068】
図8および図9には、本発明の概念によるトラッカ・タグの一実施形態を示す。上述のように、このトラッカ・タグは、全体として航空機や地上車両や船舶の電源から独立しているため、種々の電力生成機構がトラッカ・タグ自体に提供される。例えば、トラッカ・タグ12は、空気運動パワー/ファン・チューブ82およびパワー気流レバー84を有する気流技術を含む。気流90がチューブに入ると、電力が生成される。追加の電源として、トラッカ・タグには太陽光集光パネル86も提供される。トラッカ・タグの一定の動作を保証するために、バックアップ・バッテリ52(図7)がトラッカ・タグ12内の電源/電力変換モジュール47(図7)と相互接続されている。バッテリは、代替の電源のうちの1つによって選択的に再充電することができる。航空機、地上車両、または船舶上のトラッカ・タグから追跡情報サーバ14(図1)または他の適した場所へ、インターネットなどを介しての通信を提供するために、追跡システムは、多方向送受信アンテナおよび無線GPS受信機およびRF双方向無線システム・パッケージも含む。また、この実施形態は、風の抵抗を減らすために、小型の涙形状(low profile tear-shaped)の設計のトラッカ・タグ12を形成することにも留意されたい。
【0069】
図10を参照すると、記載した実施形態では、涙形状のハウジング80の空気力学的特徴が側面図に示されている。図示したように、前縁部88が左側にある。
図10は、飛行機の胴体に配置されるトラッカ・タグ12の側面を示す。トラッカ・タグ12の航空機への取り付けを示すより大きい全体像も図6に示す。これらの図からわかるように、トラック・タグ12は、航空機の内部システムから物理的および電気的に隔離され得る。これは、常にトラッカ・タグの独立性を保証する。
【0070】
この実施形態ではトラッカ・タグを小型の涙形状で示しているが、他の空気力学設計も適していることに更に留意されたい。更に、電力の生成については、エア・マウント・パワー・ファン・チューブ(air mount power fan tube)および太陽光集光パネル、およびバックアップ・バッテリとして示しているが、他の形式のエネルギー生成機構を実装することもできることを理解されたい。例えば、説明を限定するものではないが、ゲル・セル(gel cell)、燃料電池、水素電池、タービン技術、フライ・ホイール技術、および更に他の電力生成構成を用いて、トラッカ・タグ12の信頼できる動作を保証することもできる。更に、トラッカ・タグ12を地上車両や船舶に取り付けることもできる。
【0071】
図11を参照すると、追跡情報サーバ14の一実施形態は、システム・コントローラ92、メッセージング・システム93、通信リンク94、データ・ウェアハウス96、ウェブ・サーバ98、ファイル・サーバ100、およびクライアント通信インターフェイス102を含む。通信リンク94は、コマンドおよび制御情報をトラッカ・タグ12(図1)へ選択的に提供し、位置/時間組合せデータをトラッカ・タグ12から受信する。データ・ウェアハウス96は、位置/時間組合せデータを選択的に処理して、タグ・データ、資産データ、および/またはエレメント・データを形成する。メッセージング・システム93はオプションであり、eメール・メッセージング・システム、テキスト・メッセージング・システム、およびページング・システムのうちの少なくとも1以上のものを含むことができる。
【0072】
ウェブ・サーバ98は、追跡情報を表示する1組のウェブ・ページを含む。ウェブ・サーバ98は、タグ・データ、資産データ、および/またはエレメント・データをマイニングするデータ・ウェアハウス96とともになり、1または複数のウェブ・ページを、資産16(図1)の移動を監視するための追跡情報で選択的に埋める。ウェブ・サーバ98は、クライアント通信インターフェイス102とともになり、追跡情報を、追跡情報ネットワーク20(図1)を介して監視装置22(図1)の許可されたユーザから選択的にアクセスできるようにする。
【0073】
また、データ・ウェアハウス96は、タグ・データ、資産データ、および/またはエレメント・データを処理して、タグ・レポート、資産レポート、および/またはエレメント・レポートにすることもできる。レポート処理が実施されると、タグ・レポート、資産レポート、および/またはエレメント・レポートはファイル・サーバ100に格納される。ウェブ・サーバ98は、ファイル・サーバ100およびクライアント通信インターフェイス102とともになり、タグ・レポート、資産レポート、および/またはエレメント・レポートを、追跡情報ネットワーク20(図1)を介して監視装置22(図1)の許可されたユーザから選択的にアクセスできるようにする。
【0074】
ウェブ・サーバ98は、クライアント通信インターフェイス102とともになり、監視装置22(図1)の許可されたユーザから、トラッカ・タグ識別データと資産との間のリンクおよび関連のリンク情報を選択的に受信することができる。同様に、ウェブ・サーバ98は、許可されたユーザから、資産とその資産に関連するエレメントとの間のリンクおよび関連するリンク情報を選択的に受信することができる。データ・ウェアハウス96は、ウェブ・サーバ98によって収集されたリンクおよびリンク情報を格納して、資産データおよびエレメント・データの生成のときに使用できるようにする。
【0075】
システム・コントローラ92は、追跡情報サーバ14の全体的な制御を提供し、そして、通信リンク94とともになり、トラッカ・タグ12の制御を提供する。全体的制御は、タグ・プロフィール中のプログラムされた命令を基にすることができる。タグ・プロフィール中のプログラムされた命令はシステム・コントローラ92に格納される。プログラムされた命令は、コマンドおよび制御情報を含む。タグ・プロフィールは、上述のように制御情報を含む。システム・コントローラ92は、クライアント通信インターフェイス102とともになり、監視装置22(図1)の許可されたユーザからコマンドおよび制御情報を選択的に受信して、プログラムされた命令および/またはタグ・プロフィールをコンフィギュレーションおよび/または編集する。
【0076】
記載した実施形態では、システム・コントローラ92は、コマンドおよび制御モジュール103およびタグ・プロフィール104を含む。コマンドおよび制御モジュール103は、追跡情報サーバ14の全体的制御のために、プログラムされた命令を処理し、そして、通信リンク94およびデータ通信ネットワーク18(図1)とともになり、コマンドおよび制御情報を通信することによって、トラッカ・タグ12(図1)の制御の処理を行う。全体的制御の幾つかの部分は、タグ・プロフィール104を基にし得る。タグ・プロフィール104に格納される情報は、事前に決定され、制御情報において提供され得る。あるいは、タグ・プロフィール104は、事前に決定され、永久に駐在し得る。別の代替例では、タグ・プロフィール104、またはタグ・プロフィール104内の或る情報を、追跡情報サーバ14および関連するトラッカ・タグ12(図1)の動作中にコンフィギュレーションおよび/または編集することができる。
【0077】
コマンドおよび制御モジュール103は、コマンドおよび制御情報を、タグ・プロフィールに対してのプログラムされた命令へとパッケージ化することができ、そのパッケージ化したものの中には監視装置22(図1)の認可されたユーザから与えられたコマンドおよび制御情報が含まれるものであり、そのパッケージ化は、トラッカ・タグ12(図1)と関連したeメール・アドレスへメッセージング・システム93(例えば、eメール・システム、テキスト・メッセージング・システムなど)を介して通信されるeメール・メッセージとするものである。メッセージは、トラッカ・タグ12(図1)により取り出せるように、追跡情報サーバ14内のメッセージング・システム93に格納することができる。代替例としては、メッセージは、独立したメッセージ・サービス・プロバイダからトラッカ・タグ12(図1)により取り出せるように、独立したメッセージ・サービス・プロバイダ(例えば、eメール・サービス・プロバイダ、テキスト・メッセージ・サービス・プロバイダなど)へ通信されることができる。
【0078】
記載した実施形態では、通信リンク94は、RFアンテナ105、無線送受信機106、および暗号化/解読プロセス108を含む。RFアンテナ105および無線送受信機106は、データ通信ネットワーク18(図1)を介してトラッカ・タグ12(図1)から位置/時間組合せデータを選択的に受信する。また、無線送受信機106およびRFアンテナ105は、コマンドおよび制御情報をトラッカ・タグ12(図1)へ送信する。暗号化/解読プロセス108は、オプションであり、追跡情報サーバ14によって送信または受信された任意のタイプの通信を暗号化および/または解読することができる。暗号化/解読プロセス108は、トラッカ・タグ12へのすべての通信を暗号化し、トラッカ・タグ12からのすべての通信を解読することができる。あるいは、暗号化/解読プロセス108を、トラッカ・タグ12から受信された位置/時間組合せデータの解読に限定することもできる。
【0079】
記載した実施形態では、データ・ウェアハウス96は、位置/時間組合せ記憶エリア110、タグ/資産/エレメント・リンク・テーブル112、データ・プロセッサ114、タグ・データ記憶エリア116、資産データ記憶エリア118、およびエレメント・データ記憶エリア120、データ・マイニング・プロセス122、およびレポート・プロセッサ124を含む。位置/時間組合せ記憶エリア110は、通信リンク94を介してトラッカ・タグ(図1)から位置/時間組合せデータを受信する。
【0080】
タグ/資産/リンク・テーブル112は、ウェブ・サーバ98によって収集されたリンクおよびリンク情報を格納する。トラッカ・タグ12から資産14へのリンクによって、データ・プロセッサ114は、位置/時間組合せデータを資産に関連付けることができるようになり、従って、資産データを生成することができるようになる。同様に、資産14から資産のエレメントへのリンクによって、データ・プロセッサ114は、位置/時間組合せデータをエレメントに関連付けることができるようになり、従って、エレメント・データを生成できるようになる。リンク情報は、資産またはエレメントに関連付けることができる記述的情報である。リンク情報には、資産およびエレメント・データの生成中にレポート・プロセッサからアクセス可能である。
【0081】
データ・プロセッサ114は、圧縮された位置/時間組合せデータ送信を圧縮解除するデータ解凍プロセスを含み得る。位置/時間組合せデータがXYZデータまたはXYデータを含んでいない場合、追跡情報サーバ14は、図1を参照して説明した生のGPS位置データおよび時間データから、関連するトラッカ・タグ12の位置データおよび時間データを解明するアルゴリズムを含む。解明アルゴリズムがトラック・タグ12で実行されると、上記と同様に、アルゴリズムは、緯度、経度、および高度を表すXYZデータ(少なくとも4つのGPS衛星からの位置データおよび時間データを必要とする)、または緯度および経度を表すXYデータ(少なくとも3つのGPS衛星からの位置データおよび時間データを必要とする)を生成する。アルゴリズムは、XYZデータまたはXYデータに関連する時間データも生成する。
【0082】
データ・プロセッサ114は、XYZデータまたはXYデータを算出するか否かにかかわらず、XYZデータまたはXYデータを用いて、資産の位置に関連するイベントを検出することができる。データ・プロセッサ114は、XYZデータまたはXYデータを、事前に決定されたXYZまたはXY座標の制限と比較して幾つかのイベントを検出する。位置に基づいてデータ・プロセッサ114によって検出できるイベントのタイプは、トラッカ・タグ12について上記で列挙したものと同じ例を含む。当然、更なるタイプの検出イベントも可能である。典型的には、検出されたイベントは、システム・コントローラ92へ通信され、それにより、システム・コントローラ92は、その検出されたイベントに応答して適したコマンドを通信することができる。典型的には、データ・プロセッサ114は、検出されたイベントのデータを、関連する位置/時間組合せデータとともに選択的に格納する。
【0083】
データ・プロセッサ114は、コントローラからの制御情報(即ち、タグ・プロフィール104中のプログラムされた命令)、タグ/資産/エレメント・リンク・テーブルからのリンク、および検出したイベントに基づいて、位置/時間組合せデータ、検出したイベントのデータ、およびリンク情報を選択的に処理して、タグ・データ、資産データ、および/またはエレメント・データを形成する。タグ・データは、タグ・データ記憶エリア116に格納される。資産データは、資産データ記憶エリア118に格納される。エレメント・データは、エレメント・データ記憶エリア120に格納される。データ・マイニング・プロセス122は、ウェブ・サーバ98によって要求されたデータに基づいてタグ・データ、資産データ、および/またはエレメント・データをマイニングして、1または複数のウェブ・ページを追跡情報で埋める。
【0084】
レポート・プロセッサ124はオプションである。レポート処理が実施されると、レポート・プロセッサ124は、タグ・データをタグ・レポートへ、資産データを資産レポートへ、エレメント・データをエレメント・レポートへと、選択的に処理する。レポート・プロセッサ124は、タグ・レポート、資産レポート、およびエレメント・レポートを格納するためにファイル・サーバ100へ通信する。例えば、タグ・レポートは、i)生のGPS位置データおよび時間データ、ii)XYZ位置データおよび時間データ、およびiii)検出したイベントのデータを含み得る。他のタイプのタグ・レポートも可能である。例えば、資産レポートのタイプは、i)資産ログ、ii)操作ログ、iii)オペレータ・ログ、iv)制限エリアでの位置および時間、v)危険エリアでの位置および時間、vi)進路外での位置および時間、v)高ストレス状態での位置および時間、vi)予期せぬ停止の位置および時間を含み得る。他のタイプの資産レポートも可能である。例えば、エレメント・レポートのタイプは、i)エレメント・ログ、ii)操作ログ、iii)オペレータ・ログ、iv)制限エリア内での位置および時間、v)危険エリアでの位置および時間、vi)進路外での位置および時間、v)高ストレス状態での位置および時間、vi)予期せぬ停止の位置および時間を含み得る。他のタイプのエレメント・レポートも可能である。
【0085】
特に、資産が航空機である場合、追跡情報サーバ14から入手可能な資産ログを、従来の航空機ログと交換するように調整することができる。同様に、操作ログを、従来の飛行操作ログと交換するために調整し、また、オペレータ・ログを、従来のパイロット・ログと交換するために調整することができる。別の航空機レポートは、航空機が4.27km(14,000フィート)を超えていた時間数または加圧されていた時間数を明らかにすることができる。更に、エレメントが航空機エンジンの燃料ポンプである場合、高ストレス状態レポートにおける位置および時間は、エンジンが高圧状態にさらされていた総時間数を明らかにすることができる。別の燃料ポンプ・レポートは、離陸および/または着陸、および関連の状態を明らかにすることができる。
【0086】
記載した実施形態では、ウェブ・サーバ98は、データ・アプレット126、マップ・アプレット128、マップ記憶エリア130、追跡情報モジュール132、タグ/資産/エレメント・リンク入力/編集モジュール134を含む。追跡情報モジュール132はウェブ・ページの組を含む。追跡情報モジュール132は、ウェブ・ページを介して監視装置22(図1)で、許可されたクライアント・ユーザに対して、1または複数のウェブ・ページを介して提示されたクライアント・ユーザの選択および要求に応じて追跡情報を提示する。
【0087】
マップ・アプレット128およびデータ・アプレット126は、許可されたクライアント・ユーザによる選択および要求に応答するウェブ・ベースのプログラムである。典型的には、追跡情報モジュール132は、マップ記憶エリア130から取り出されたマップ、マップ・アプレット128によってマップに重ね合わせた補足グラフィックス、およびデータ・アプレット126によって提供される補足テキストを介して、追跡情報を示す。マップは、追跡すべき資産のタイプに適した任意のマップとすることができる。例えば、マップ記憶エリア130は、道路地図136、航空地図(aviation map)138、水域地図(water map)140、鉄道地図142、および三次元(3D)環境のうちの1または複数のものを含み得る。他のタイプのマップを提供することもできる。
【0088】
マップ・アプレット128は、デフォルトでは、適切なウェブ・ページに航空地図138を提供して航空機を追跡できるようにする。ウェブ・ページによって、クライアント・ユーザは、異なるマップを選択することができる。クライアント・ユーザが異なるマップを選択すると、マップ・アプレット128は、選択されたマップを表示するようにウェブ・ページを変更する。同様に、データ・アプレット126は、何らかのタグ・データ、資産、および/またはエレメントのデータをデータ・ウェアハウス96から取り出し、それをデフォルトで所与のウェブ・ページに提供することができる。ウェブ・ページによって、クライアント・ユーザは、追加のまたは異なる追跡情報を選択することができる。その場合、データ・アプレット126は、それに応じて、クライアント・ユーザの選択および要求に応答する。
【0089】
マップおよびテキストの位置および時間の追跡情報とともに、データ・アプレット126は、データ・ウェアハウス96からXYZまたはXYの位置データおよび時間データを取り出す。XYZまたはXYの位置データは、マップ・アプレット128および追跡情報モジュール132へ提供される。マップ・アプレット128は、マップ上のXYZまたはXYの位置を表すアイコンを生成し、それを、追跡情報モジュール132へ提供されるマップ表示に重ね合わせる。複数のタイプのアイコンと、色、点滅、およびアイコンの他の適した属性を用いて、資産に関連する幾つかの状態を記号で表すことができる。当然、ウェブ・ページに組み込むことができる他の多くの特徴を実装して追跡情報を提供することもできる。
【0090】
図12に、幾つかのタイプのアイコンが重ねられたマップの例を示す。図12はテキスト情報を含んでいないが、XYZまたはXYの位置および時間をマップの適した位置に重ね合わせることもできる。更に、例えば一群の航空機や全ての飛行中の航空機を追跡するために、追加の資産のためのアイコンおよびデータをマップに重ねることができる。追跡情報モジュール132は、典型的には、マップ表示のパンやズームを可能とし、それにより、クライアント・ユーザが表示を特定の好みに調整できる。
【0091】
ウェブ・サーバ98は、典型的には、許可されたユーザがリンクおよびリンク情報をコンフィギュレーションすることを可能にする1または複数のウェブ・ページを含む。タグ・リンク入力/編集モジュール134は、1または複数のウェブ・ページとともに動作して、リンクおよびリンク情報を収集し、それをデータ・ウェアハウス96へ通信する。ウェブ・サーバ98は、典型的には、許可されたユーザがタグ・プロフィール104をコンフィギュレーションすることを可能にするウェブ・ページも含む。
【0092】
1組のウェブ・ページの中で、クライアント・ユーザは、典型的には、特定のタグ、資産、および/またはエレメントの監査追跡を提供するテキスト情報にアクセスすることができる。特に、資産をトラッカ・タグにリンクし、エレメントを資産にリンクする概念には、異なるトラッカ・タグおよび異なる資産にわたってリンクされる資産およびエレメントの履歴データを蓄積する利点がある。例えば、航空機上のトラッカ・タグが何らかの理由のために交換されると、資産とトラッカ・タグとの間のリンクが更新され、航空機の資産データは、最初のトラッカ・タグにより提供されるデータおよび新しいトラッカ・タグにより提供されるデータを含む。従って、航空機の履歴的な追跡情報およびレポートは総合的であり得る。同様に、航空機エンジン用の燃料ポンプがたまたま或る航空機から取り外されて別の航空機に取り付けられた場合、燃料ポンプのエレメント・データは、エレメントと資産との間のリンクが更新される限りは、包括的である。
【0093】
記載した実施形態では、ファイル・サーバ100は、タグ・レポート記憶エリア144、資産レポート記憶エリア146、エレメント・レポート記憶エリア148、およびファイル転送モジュール150を含む。ファイル転送モジュール150は、ウェブ・サーバ98からのレポートの要求に応答して、記憶域からタグ・レポート、資産レポート、および/またはエレメント・レポートを取り出す。典型的には、これは、ウェブ・ページを介したクライアント・ユーザからの選択または要求に応答してのものである。
【0094】
記載した実施形態では、クライアント通信インターフェイス102は、ネットワーク・インターフェイス152、インターネット・インターフェイス154、セキュリティ保護されていないエリア(unsecured area)156、およびセキュリティ・チェック158を含む。ネットワーク・インターフェイス152は、追跡情報ネットワークにおいて通信ネットワークへの標準のインターフェイスを提供する。例えば、ネットワーク・インターフェイス152は、LAN、無線LAN、地上電話ネットワーク、衛星システム、または他の任意の適した通信ネットワークへ接続することができる。インターネット・インターフェイス154は、インターネットへの任意のタイプの標準インターフェイスを提供する。追跡情報サーバ14への他の適したインターフェイスも可能である。監視装置22は、インターネット・インターフェイス154を介して追跡情報サーバへアクセスできることが好ましい。
【0095】
セキュリティ保護されていないエリア156は、追跡情報を提供しない。このエリアは、クライアント・ユーザにログイン・シーケンスを行うことを要求する。ログイン情報がセキュリティ・チェック158へ提供されると、そのクライアント・ユーザに対して、追跡情報を監視するためにウェブ・サーバに入ること、タグ・プロフィール104をコンフィギュレーションすること、またはリンクおよびリンク情報をコンフィギュレーションすることが許可されているか否かが判定される。セキュリティ保護されていないエリア156は、ウェブに基づくものとすることができ、追跡システムおよび/または追跡サービスを記述する情報を含み得る。
【0096】
図12を参照すると、監査装置22(図1)の表示の一部の例は、道路地図162を示す。イリノイ州シカゴ164を出発し、航空機は、ニューヨーク州ジェームズタウン166に到着する航空機である。追跡情報168を、シカゴからジェームズタウンを指す一連の矢印で示す。
【0097】
図12は、米国の一部を示すマップを示す。マップ中、シカゴからニューヨーク州ジェームズタウンへの矢印は、追跡システムへアクセスできるユーザに対して可視的に示される経路を示す。これによって、ユーザは、対象の飛行または地上車両の進行を常に追跡することができる。また、船舶を追跡するこうしたマップを提供することもできる。
【0098】
図13を参照すると、地域追跡システム170の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、PSTN32、インターネット36、セルラー電話ネットワーク172、セルラー電話/PSTNゲートウェイ174を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して説明したとおりである。
【0099】
追跡システム170の地域的な実施は、地域的な有効範囲(即ち地域的な通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、ワイヤレスの地上電話システムおよび陸線の地上電話ネットワークによって提供される。好ましいワイヤレス地上電話システムは、セルラー電話システムである。しかし、地域的な有効範囲を提供する他のワイヤレス地上電話システムを実装することもできる。好ましい地上電話ネットワークはPSTNである。しかし、他のタイプの地上電話ネットワークを実装することもできる。より具体的には、データ通信ネットワーク18(図1)は、セルラー電話ネットワーク172、セルラー電話/PSTNゲートウェイ174、およびPSTN32によって提供される。
【0100】
記載されている実施形態では、追跡情報ネットワーク20(図1)は、地上電話システムおよびインターネット36によって提供される。示されるように、好ましい地上電話システムは、陸線の電話システムである。しかし、地域的な有効範囲を提供する他の地上電話システムを地域追跡システム170に実装することもできる。より具体的には、追跡情報ネットワーク20(図1)は、PSTN32およびインターネット36によって提供される。
【0101】
図14を参照すると、ローカル追跡システム176の一実施形態は、トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、GPS衛星コンステレーション24、無線LAN178、無線LAN/LANハブ180、およびLAN182を含む。トラッカ・タグ12、追跡情報サーバ14、資産16、監視装置22、およびGPS衛星コンステレーション24は、図1を参照して説明したとおりである。
【0102】
追跡システム170のローカル的な実施は、ローカルな有効範囲(即ちローカルな通信)を提供するデータ通信ネットワーク18(図1)および追跡情報ネットワーク20(図1)によって提供される。データ通信ネットワーク18(図1)は、無線LAN178、無線/有線LANハブ180、および有線LAN182によって提供される。しかし、ワイヤレスのデータ通信を扱うのに適した他のローカル・ネットワークも可能である。追跡情報ネットワーク20(図1)は、有線LAN182によって提供される。しかしながら、データ通信を扱うのに適した他のローカル・ネットワークも可能である。
【0103】
本発明の一実施形態では、トラッカ・タグ12(図1)は、双方向無線を含み、航空機と動作可能に関連付けられる。トラッカ・タグは、GPS衛星からのデータ送信を受信する。航空機の位置は、GPSデータから決定することができる。更にトラッカ・タグは、少なくとも部分的にイリジウム衛星システムを介して無線信号を送信および受信する追跡情報サーバ14(図1)との間でのデータの送信および/またはコマンドの受信の能力を有する。トラッカ・タグは、航空機の翼または機体の高い側に取り付けられることが好ましい。自動車、トラック、船、列車などのような、他の形式の輸送機関の場合、トラッカ・タグは、視線上に空が位置するように、こうした車両および船の高い側に取り付けられることが好ましい。トラッカ・タグは、高地球周回軌道で周回するGPS衛星からGPSデータを受信し、XYZ座標(Xは緯度、Yは経度、Zは高度)でのトラッカ・タグの位置を決定する。
【0104】
更に、トラッカ・タグは、低地球周回軌道で周回するイリジウム衛星グループなどのような周回している別の衛星へ、トラッカ・タグの位置を通信するように事前にプログラムされたタスクでXYZ位置を送信することができる無線送信機および無線受信機を含む。本質的に、トラッカ・タグおよび機能をサポートするシステムは、地上(即ち、追跡システム・サーバ14(図1))からクエリ・ピング(query ping)を受信し、トラッカ・タグにピングを受信させ、通信衛星システムへ送信する文字列をトリガさせてXYZ位置をリアルタイムで報告する。反復されるピングに対して、信頼精度が約457.2mm(18インチ)という高精度の反復されるXYZ位置で応答する。プログラムされたタスクが、位置を絶えず報告することである場合、トラッカ・タグは、プログラムされた順序で、トラッカ・タグの絶えず続く位置および、従って、航空機、地上車両、または船舶の位置を報告する。
【0105】
こうした無線信号またはデータは、特定のトラッカ・タグを表すアイコンとして、テンプレートのマップおよびチャートに投影される座標の点として変換される。例えば、トラッカ・タグは、航空機、地上車両、および/または船舶の一意の番号および識別子を含む。
【0106】
暗号化およびデータ圧縮技術は、システムのセキュリティを維持すると同時に、加入したユーザおよび/または許可されたエンティティに対して「トラッカ」情報を受信するためのアクセスを与える。この場合も、ページャ、セルラー電話、PDAコンピュータ、インターネットで用いられているような、広範にわたって使用可能で信頼できる技術を用いることによって、この情報を、所望のセキュリティ・レベルで、有効に送信および受信することができる。
【0107】
トラッカ・タグおよびサポート・システムは、トラッカ・タグの視線上に空が位置する限り、世界中の何れもの一般の航空機、地上車両、または船舶の位置を提供する。視界上に空が位置しない場合、「トラッカ」データは、例えば航空機、地上車両、船舶が格納されている格納庫の前などのような、トラッカ・タグが視線上にさらされた最後の位置を反映する。「トラッカ」データは、「トラッカ」およびサポート・システムを備える任意の航空機、地上車両、または船舶のリアルタイムの任意の移動および位置を反映する。
【0108】
一実施形態では、トラッカ・タグは、離陸前にすべての一般の航空機に配置され、航空機に取り付けられたトラッカ・タグの一意の番号が、任意の飛行計画および航空機に関連する任意の飛行状態の報告に含まれる。
【0109】
トラッカ・タグは、システムにアセンブルされている場合、世界の何れにあっても航空機、地上車両、または船舶の位置および性能を追跡する能力を提供する3つの主なサブシステムを含んでいることが好ましい。サブシステムは、
1.電力生成および変換47(図7)、
2.データ収集および処理49(図7)、
3.データ通信リンク48(図7)、
に分類される。
【0110】
トラッカ・タグは、航空機の機体、地上車両、または船舶の上部へ直接に取り付けられるほど十分小さく、こうした形式の輸送機関の電気的および/または機械的システムの何れに対しても侵入しないものとする。トラッカ・タグは、航空機、地上車両、または船舶およびその操作パラメータに関係するすべてのデータを自動的に収集および処理する。完全に統合されたGPS受信機65(図7)は位置情報を提供し、それにより、正確な操作パラメータが収集されるようにする。データは、幾つかの手段を介した問い合わせのためにトラッカ・タグ内に格納される。トラッカ・タグは、追跡情報サーバへの直接的な連絡によって、所定のメンテナンス間隔でデータを転送する準備ができており、または、データは、幾つかのリモート・ワイヤレス・インターフェイスの1つを介してリアルタイムで収集される。これらのインターフェイスによって、広域またはローカル・エリアの接続が可能になる。
【0111】
要約すると、本発明の一部である顕著な特徴の一部は下記のようである。トラッカ・タグは、従来の技術とは異なり、その小さい外形、耐用年数、電力供給(太陽および圧電による電力生成およびバックアップ・バッテリ)、極度な状態での動作(−40度から最高+85度)に耐える能力、およびすべての高度での有効性を有するので、より大きいシステムに統合することができる装置である。
【0112】
トラッカ・タグは、GPSデータを受信し、通信衛星を介してページング技術を用いて位置および他のデータに応答すること及び/又はそれを報告することができる。こうした通信では、標準のパーソナル・コンピュータ、ページャ装置、ビデオ表示セルラー電話、またはウェブ対応ビデオPDAコンピュータを用いて表示することができるマップやチャートなどのようなビデオ・テンプレートに、位置を表示することができる。現在、システムは、マップ/チャートのXYZ座標に世界の任意の場所にあるトラッカ・タグの正確な位置を表示する目的のためのウェブ・サイトを用いることを、企図している(ただし、トラッカ・タグの「視線上」に空があり、通信(即ちRFの送信および受信)が妨害されないという条件がある)。
【0113】
追跡システムは、最新技術で位置をリアルタイムで提供するように、通信のためのGPSシステム、イリジウム衛星システム、地上電話システム、およびインターネット、および現在「最新」のデータベース・ストレージ(好ましくは、個々に設置され、商用化されているシステム)を、有利にかつシームレスに統合する。システムによって、ユーザ/加入者は、インターネット・アクセスを介して、一般に用いられているパーソナル・コンピュータまたは任意のデータ対応表示装置を用いて、正確な位置へリアルタイムでアクセスできるようになる。
【0114】
リアルタイムで(または、プログラムされたタスクにより要求されるように)蓄積された振動、位置、および報告データに関する飛行データ収集技術も、システムに統合することができる。例えば、燃料ポンプの状態および信頼性を予測するための経験データを蓄積するために、振動データ記録を収集および分析して、整備について決定することができる。同様に、追跡タグは、加速時計または別のタイプの振動センサを使用して、GPS技術と環境感知技術を統合することができる。一実施形態において、GPS、無線送受信機、およびトラッカ・タグの他のコンポーネントのための電力生成は、システムに対しての所望される独立性を提供する。つまり、トラッカ・タグは、航空機や、地上車両や、船舶上の受動的感知装置を介して幾つかの操作/環境パラメータのリアルタイムの通信を提供し、また航空機、地上車両、または船舶の位置を報告することができる。なぜなら、トラッカ・タグは、個別に電力供給されており、航空機、地上車両、または船舶、あるいはそのオペレータ/乗組員(即ち、スタッフ)の制御下にないからである。追跡システムに関連するデータは、通常の様々な装置(例えば、ページャ、セルラー電話、ワイヤレスPDAコンピュータなどにある典型的なディスプレイ)に表示することができ、インターネットを介してアクセス可能である。スケーラブルなコンピュータ・アーキテクチャおよび設計によって、システムは、複数のトラッカ・タグから受信(エンコード、暗号化、圧縮)されるすべてのデータを処理(データベースへの格納および分配)し、インターネットを介してユーザ/加入者のページャ、セルラー電話、および/またはPADコンピュータに対して個々に適合させた表示を作成することができるようになる。
【0115】
図15を参照すると、トラッカ・タグ12’の別の実施形態は、電源/電力変換モジュール47、データ通信リンク48’、およびデータ収集/処理モジュール49’を含む。電源/電力変換モジュール47は、図7を参照して上述したように動作する。データ収集/処理モジュール49’は、トラッカ・タグ12’の視線(見通し線)内にあるGPS衛星240(図3)から位置データおよび時間データを選択的に受信し、生のGPS位置データおよび時間データの処理を一般に図7を参照して説明したように行う。また、データ収集/処理モジュール49’は、一般的に図7を参照して説明したように、位置および時間組み合わせデータをデータ通信リンク48’へ選択的に通信する。データ通信リンク48’は、一般的に図7を参照して説明したように、データ通信ネットワーク18(図1)を介して位置および時間組み合わせデータを追跡情報サーバ14(図1)へ選択的に送信する。また、データ通信リンク48は、一般的に図7を参照して説明したように、コマンドおよび制御情報を追跡情報サーバ14(図1)から受信する。
【0116】
記載した実施形態では、データ通信リンク48’は、RFアンテナ58、無線送受信機60、暗号化/解読プロセス62、およびネットワーク・プロセッサ63を含む。RFアンテナ58、無線送受信機60、暗号化/解読プロセス62は、図7を参照して上述したように動作する。ネットワーク・プロセッサ63は、最新のプログラムされた命令を伴う更新されたタグ・プロフィールを、追跡情報サーバ14(図1)から、例えば、電子メール・システム(例えば、POP3電子メール・サーバ)を介して受信するための通信を、選択的に開始する。また、ネットワーク・プロセッサ63は、位置および時間組み合わせデータを追跡情報サーバ14(図1)へ送信するための通信を選択的に開始する。上述のように、位置および時間組み合わせデータは、センサ・データも含むことができる。また、ネットワーク・プロセッサ63は、追跡情報サーバ14(図1)の許可されたユーザに対してページングを行って、特定の状態が生じたことを通知するための通信を、選択的に開始することができる。図7に示したトラッカ・タグ12では、こうした機能をコントローラ68(図7)のプロセッサ70(図7)に組み込むことができる。記載した実施形態では、ネットワーク・プロセッサ63をデータ通信の制御のために使用することにより、データ通信が必要でないときには、これをシャット・ダウンまたはスリープ状態に置くことができるようになる。これにより、トラッカ・タグ12’は、電力を節約し、電源50の寿命を延長する更に別の電力管理機能を組み込むことができるようになる。
【0117】
記載した実施形態では、データ収集/処理モジュール49’は、GPSアンテナ64、GPS受信機65、環境センサ66、制御装置67、およびコントローラ68’を含む。GPSアンテナ64、GPS受信機65、環境センサ66、および制御装置67は、図7を参照して上述したように動作する。コントローラ68’は、一般的に図7を参照して説明したように、位置、時間、およびセンサ・データの受信および処理を行う。また、コントローラ68’は、一般的に図7に示すように、位置および時間組み合わせデータをデータ通信リンク48’へ選択的に伝達する。
【0118】
図7を参照して上述したように、環境センサ66はオプションであり、1または複数の様々なタイプのセンサを含むことができ、様々なセンサには、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、電場(e−field)センサ、および他の定量化可能なパラメータを測定する能力のあるセンサが含まれる。従って、環境センサ66は、任意のタイプの1または複数のセンサの任意の組み合わせを表す。
【0119】
任意のセンサをコントローラ68’で使用して、イベントを検出し、続いてトラッカ・タグ12’の動作を変更することができる。同様に、コントローラ68’は、GPS衛星240からの位置データおよび/または時間データを使用して、イベントを検出し、続いて動作を変更することができる。検出されるイベントの幾つかのタイプには、ステートの変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が含まれる。更に、位置および時間組み合わせデータが追跡情報サーバ14(図1)へ送信されるときには、位置および時間組み合わせデータは、最後のデータ・ダウンロード以降の検出されたイベントに関係する位置、時間、およびセンサのデータを含むことができる。
【0120】
コントローラ68’は、ステート変化の状態を使用して、ネットワーク・プロセッサ63のウェイク・アップ(復帰)またはスタート・アップ(起動)を行い、それと共に命令を使用して、新しいタグ・プロフィールが追跡情報サーバ14(図1)の許可されたユーザによってコンフィギュレーションされているかどうかを検査することができる。新しいタグ・プロフィールが見つかった場合には、それがネットワーク・プロセッサ63によって取り出されてコントローラ68’へ通信される。コントローラ68’は、新たなタグ・プロフィールに含まれる新たなプログラムされた命令をインストールする。次いで、コントローラ68’は、その後のステート変化、データ収集、およびデータ・ダウンロードの状態に対する応答を、その現在のプログラムされた命令に従って行う。コントローラ68’は、データ収集の状態を使用して、センサデータ、位置データ、および/または時間データの収集および格納を、その現在のプログラムされた命令に従って行うことができる。コントローラ68’は、データ・ダウンロードの状態を使用して、ネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップを行い、それと共に命令を使用して、現在コントローラ68’によって格納されているデータとともに追跡情報サーバ14(図1)へダウンロードすることができる。データ・ダウンロードのための通信が確立された後、コントローラ68’は、格納されたデータををネットワーク・プロセッサ63へ通信し、ネットワーク・プロセッサ63はそれを追跡情報サーバ14(図1)へ渡す。
【0121】
記載した実施形態では、コントローラ68’は、センサ・プロセッサ71、記憶装置72、補助入力/出力(I/O)ポート74、および資産通信インターフェイス75を含む。センサ・プロセッサ71は、GPS受信機65、環境センサ66、制御装置67、記憶装置72、補助I/Oポート74、資産通信インターフェイス75、およびデータ通信リンク48と通信する。記憶装置72は、データ・バッファ76、トラッカ・タグ識別データ78、およびタグ・プロフィール79を含み、図7を参照して上述したように動作する。タグ・プロフィール79は、ステート変化、データ収集、およびデータ・ダウンロードの状態、ならびに、トラッカ・タグ12’が検出するようにプログラムされた様々な他のイベントに関連するコマンドおよび命令を含む。補助I/Oポート74は、図7を参照して上述したように動作する。適切なデータ収集の状態になると、センサ・プロセッサ71は、GPS受信機65から位置データおよび時間データを受信し、生のGPSの位置データおよび時間データを組み合わせて位置および時間組み合わせデータを形成し、その位置および時間組み合わせデータをデータ・バッファ76へ選択的に格納する。適切なデータ・ダウンロードの状態になると、センサ・プロセッサ71は、位置および時間組み合わせデータを、データ・バッファ76からデータ通信リンク48へ選択的に通信する。
【0122】
資産通信インターフェイス75はオプションであり、1または複数の資産/輸送手段のセンサから情報を受信して特定の環境的および/または動作的特性を監視し、1または複数の資産/輸送手段の制御装置へ情報を送信して、資産および/または輸送手段の動作の特定の側面を制御するように適合されている。資産/輸送手段のセンサからの情報は、トラッカ・タグ12’の動作に関連するステート変化の状態、データ収集の状態、データ・ダウンロードの状態、および他の検出されるイベントを識別するために、トラッカ・タグ12’で使用することができる。また、資産/輸送手段のセンサからの情報は、資産/輸送手段の制御の状態を識別するためにトラッカ・タグ12’で使用することができる。同様に、トラッカ・タグ12’は、センサ・データ、位置データ、および/または時間データを使用して、資産/輸送手段の制御の状態を識別することができる。トラッカ・タグ・プロフィール79は、資産/輸送手段の制御の状態に関連するコマンドおよび命令、ならびに、1または複数の資産/輸送手段のセンサによって検出されるイベントに基づくステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態に関連するコマンドおよび命令を含む。
【0123】
資産通信インターフェイス75は、様々な有線および/または無線技術を実装することができる。資産通信インターフェイス75は、有線によるものであるときは、センサ・プロセッサおよび資産/輸送手段内の対応する装置に対する通信プロトコルと互換性のある適切なコネクタおよびインターフェイス・アダプタを含む。同様に、資産通信インターフェイス75は、無線のものであるときは、センサ・プロセッサおよび資産/輸送手段内の対応する装置に対する通信プロトコルと互換性のある適切なインターフェイス・アダプタ、およびアンテナ/送受信機モジュールを含む。従って、資産通信インターフェイス75は、様々なタイプのシリアルまたはパラレル・バス(例えば、CANバス、USBなど)や、イーサネット(例えば、IEEE802.3、IEEE802.11など)や、Bluetoothを含む任意の適切なタイプの有線および/または無線技術を実装することができる。
【0124】
センサ・プロセッサ71は、図1を参照して上述した解明アルゴリズムを含み得る。解明アルゴリズムを用いると、センサ・プロセッサ71は、XYZデータまたはXYデータおよび関連する時間データを生成しながら、位置および時間組み合わせデータを一時的に格納する。XYZデータまたはXYデータ、および関連する時間データが生成されると、それらはデータ・バッファ76に格納され、対応する生のGPS位置データおよび時間データがパージされる。データ通信リンク48へ通信される位置および時間組み合わせデータは、生のGPS位置データおよび時間データの代わりに、XYZデータまたはXYデータおよび関連の時間データを含む。
【0125】
例えば、環境センサ66が振動センサまたは加速度計の形で実装されている場合、センサ・プロセッサ71は、振動センサによる振動測定値に関連するイベントを検出する。別の例では、センサ・プロセッサ71は、XYZデータまたはXYデータを用いて、資産の位置に関する更なるイベントを検出することができる。センサ・プロセッサ71は、XYZデータまたはXYデータを、タグ・プロフィール79のコマンドおよび制御情報で識別される事前に決定されたXYZ座標またはXY座標の制限と比較して、ステート変化、データ収集、データ・ダウンロード、および資産/輸送手段の制御の状態などの特定のイベントを検出する。より具体的には、センサ・プロセッサ71は、資産が、i)制限区域付近にあるとき、ii)制限区域内にあるとき、iii)危険区域付近にあるとき、iv)危険区域内にあるとき、v)中間地点にあるとき、vi)目的地にあるとき、vii)進路外にあるとき、viii)高ストレス状態に近いとき、ix)高ストレス状態を経験しているとき、x)高度が過度に低下しているとき、xi)高度が過度に上昇しているとき、xii)予期せぬ停止または著しい減速に遭遇しているとき、またはxiii)速度制限を超えているときに、それを検出することができる。こうしたタイプの検出されたイベントは、タグ・プロフィール79内で、ステート変化の状態、データ収集の状態、データ・ダウンロードの状態、および資産/輸送手段の制御の状態として、指定することができる。もちろん、更に別のタイプの検出されるイベントも可能であり、特に、環境センサ66(例えば、振動、温度、歪み、電圧、圧力、および電場のセンサ)および資産/輸送手段のセンサに関してのものが可能である。
【0126】
まとめると、センサ・プロセッサ71は、タグ・プロフィール79内部のプログラムされた命令で指定されるイベントを検出して、GPS位置データおよび時間データに関連するステート変化、データ収集、データ・ダウンロードの状態を識別する。更に、1または複数の環境センサ66が実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、ステート変化、データ収集、データ・ダウンロードの状態を識別する。同様に、資産通信インターフェイス75が、1または複数の資産/輸送手段のセンサから情報を受信するために実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、1または複数の資産/輸送手段のセンサに関連する更なるステート変化の状態、データ収集の状態、データ・ダウンロードの状態を識別する。更に、資産通信インターフェイス75が、資産/輸送手段の制御装置へ情報を送信するために実装されている場合、センサ・プロセッサ71は、タグ・プロフィール79内のプログラムされた命令で指定されるイベントを検出して、1または複数の環境センサ66および/あるいは1または複数の資産/輸送手段のセンサに関連する資産/輸送手段の制御の状態を識別する。
【0127】
典型的に、センサ・プロセッサ71は、ステート変化、データ収集、データ・ダウンロード、および資産/輸送手段の制御の状態などの検出されたイベントに関連する位置、時間、およびセンサのデータを選択的に格納する。この検出されたイベント・データの格納は、追跡に利用される任意の位置および時間組み合わせデータと共に行われる。振動に関連する検出されたイベントのように、センサ・プロセッサ71は、位置および時間に関連する任意の検出イベントを用いて、トラッカ・タグ12’が位置および時間データの受信を開始すべきか、位置および時間組み合わせデータの格納を開始すべきか、および位置および時間組み合わせデータの送信を開始すべきかを、決定する。更に、任意のタイプの検出されたイベントに関連するデータを、監視装置22(図1)で加入者/クライアント・ユーザへ提供される追跡情報に含めることができる。
【0128】
センサ・プロセッサ71は、データ通信リンク48’のネットワーク・プロセッサ63からコマンドおよび制御情報を受信する。ある実施形態では、ネットワーク・プロセッサ63は、コマンドおよび制御情報の受信を、電子メール・システム(例えば、POP3電子メール・サーバ)にログインし、トラッカ・タグ12’に関連する電子メール・アドレスへの電子メールを取り出すことによって行う。この実施形態では、コマンドおよび制御情報は、追跡情報サーバ14(図1)からの電子メール・メッセージに含まれる。この電子メール・メッセージは、監視装置22(図1)の許可されたユーザによって作成されたものである。電子メール・システムは、追跡情報サーバ14内のメッセージング・システム93でもよく、また、独立の電子メール・サービス・プロバイダを通したものでもよい。タグ・プロフィール79に格納される情報は、最初に予め決定することができる。電子メール・メッセージ内のコマンドおよび制御情報は、新しいタグ・プロフィール内のプログラムされた命令として提供することができる。新しいタグ・プロフィールは、ネットワーク・プロセッサ63によってセンサ・プロセッサ71へ通信される。センサ・プロセッサ71は、新しいタグ・プロフィールを、現在のタグ・プロフィール79内のプログラムされた命令の上に書き込むか又はマスクして、タグ・プロフィール79を電子メール・メッセージに基づいて更新することができる。
【0129】
センサ・プロセッサ71は、追跡情報サーバ14(図1)へのデータ送信および電力消費の管理を、ネットワーク・プロセッサ63が位置および時間組み合わせデータの送信およびプログラムされた命令を伴う新しいタグ・プロフィールに関する検査を行う時を制御することによって、行う。典型的には、センサ・プロセッサ71は、データ送信を、データ・ダウンロードの状態がネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップの前に検出されるのを待つことによって、バースト様式で制御する。次いで、データ送信が確認された後、センサ・プロセッサ71は、ネットワーク・プロセッサ63をスリープ状態にするかシャット・ダウンすることができる。更に、センサ・プロセッサ71は、好適には、新しいタグ・プロフィールに関する検査を、ステート変化の状態がネットワーク・プロセッサ63のウェイク・アップまたはスタート・アップの前に検出されるのを待つことによって、制御する。次いで、センサ・プロセッサ63が、新しいタグ・プロフィールをセンサ・プロセッサ71へ提供した後、または新しいタグ・プロフィールが見つからなかったことを確認した後に、センサ・プロセッサ71は、再度、ネットワーク・プロセッサ63をスリープ状態に置くかシャット・ダウンすることができる。
【0130】
センサ・プロセッサ71は、それぞれの送信バーストを、トラッカ・タグ識別データ78とともにエンコードして、追跡情報サーバ14(図1)が、送信されたデータを適切なトラッカ・タグ12’と関連付けることができるようにする。検出された状態(またはイベント)に関連するセンサ、位置、および時間のデータも、データ・バッファ76に格納される。データ送信は、検出された状態に関連するセンサ、位置、および時間のデータを、追跡に使用される位置および時間組み合わせデータと共に含む。
【0131】
図16を参照すると、トラッカ・タグがパワー・アップ/リセットの状態に応答するプロセス200の一実施形態は、ステップ202で始まり、ここで、パワー・アップ/リセットの状態は、例えば、制御装置67(図15)のアクティブ化によって開始される。次に、ステップ204で、トラッカ・タグのセルフ・テスト(自己試験)が行われる。ステップ206で、プロセスは、セルフ・テストに合格したか失敗したかを判定する。セルフ・テストに合格した場合、プロセスは、セルフ・テストの完了を、セルフ・テスト合格イベントに基づくステート変化の状態として検出する(ステップ208)。逆に、セルフ・テストに失敗した場合、プロセスは、セルフ・テストの完了を、セルフ・テスト失敗イベントに基づくステート変化の状態として検出する(ステップ210)。ステップ208またはステップ210の後、プロセスは、タグ・プロフィール79(図15)に従って、ステート変化の状態に対してのプログラムされた命令を現在の実行する。
【0132】
図17を参照すると、トラッカ・タグがステート変化の状態に応答するプロセス220の一実施形態が、ステップ222で始まる。ステップ222では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。次に、ステート変化の状態が検出される(ステップ224)。1または複数のステート変化の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的に、ステート変化の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み(strain)、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、ステート変化の状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、ステート変化の状態の検出は、現在のタグ・プロフィールでのステート変化のパラメータを、対応するセンサからの測定値またはGPSの位置もしくは時間データと比較することによって、行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のステート変化のパラメータと比較してステート変化の状態を検出するためのアルゴリズムを含み、それには、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムが含まれる。
【0133】
ステップ226で、ステート変化の状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサは、ネットワーク・プロセッサをスタート・アップ(起動)する(ステップ228)。ステップ230で、ネットワーク・プロセッサは、追跡情報サーバからのトラッカ・タグに対する新しいプログラムされた命令を伴う新しいタグ・プロフィールを含む電子メール・メッセージを取り扱う役目の電子メール・システム(例えば、POP3電子メール・サーバ)との通信を、開始する。この電子メール・システムは、追跡情報サーバ14(図1)内のメッセージング・システム93とするこができ、また、独立の電子メール・サービス・プロバイダによって提供されるものでもよい。次に、プロセスは、ネットワーク・プロセッサと電子メール・システムとの間の通信が確立されていることを確認する(ステップ232)。通信が確認された場合、ステップ234で、ネットワーク・プロセッサは、トラッカ・タグに対する新しい電子メールがあるかどうかを検査する。次に、ネットワーク・プロセッサは、トラッカ・タグに対する新しいタグ・プロフィールがあるかどうかの判定を、新しい電子メールがあるかどうかに基づいて行う(ステップ236)。新しいタグ・プロフィールがない(即ち、新しい電子メールがない)場合、ステップ238で、ネットワーク・プロセッサは、電子メール・システムとの通信を終了する。次に、センサ・プロセッサは、ネットワーク・プロセッサをシャット・ダウンする(ステップ240)。ステップ242で、センサ・プロセッサは、スリープ状態に入る。次に、プロセスは、現在のタグ・プロフィール79(図15)に従って、ステート変化、データ収集、およびデータ・ダウンロードの状態に対するプログラムされた命令を実行する。
【0134】
ステップ232で、ネットワーク・プロセッサと電子メール・システムとの間の通信が確認されなかった場合、ネットワーク・プロセッサは、トラッカ・タグのデータ通信リンクをリセットし、ステップ230に戻って再試行する(ステップ246)。
【0135】
ステップ236で、新しいタグ・プロフィール(即ち、新しい電子メール)がある場合、ステップ248で、ネットワーク・プロセッサは新しいタグ・プロフィールをアップロードする。次に、ネットワーク・プロセッサは、電子メール・システムとの通信を終了する(ステップ238)。ステップ240で、ネットワーク・プロセッサが新しいタグ・プロフィールをセンサ・プロセッサへ通信した後、センサ・プロセッサはネットワーク・プロセッサをシャット・ダウンする。次に、センサ・プロセッサは、新しいタグ・プロフィールからの新しいプログラムされた命令を、センサ・プロセッサ71(図15)に関連する記憶装置72(図15)内部のタグ・プロフィール79(図15)へインストールする(ステップ249)。新しいプログラムされた命令は、対応するプログラムされた命令を上書きする。しかし、プログラムされた命令が新しいプログラムされた命令によって変更されなかった場合、そのプログラムされた命令が新しいプログラムされた命令によって削除すべきであると指定されない限り、そのまま残る。ステップ242で、センサ・プロセッサはスリープ状態に入る。次に、プロセスは、現在のタグ・プロフィール79(図15)(即ち、新しいプログラムされた命令を含む)に従って、ステート変化、データ収集、およびデータ・ダウンロードの状態に対するプログラムされた命令を実行する。
【0136】
ステート変化の状態を取り扱うためのプロセスの別の実施形態では、電子メール・システムの代わりに、テキスト・メッセージング・システムを使用することができる。更に別の実施形態では、電子メール・システムの代わりに、直通の双方向通信を使用することができる。
【0137】
ステート変化の状態を取り扱うためのプロセスの別の実施形態では、ネットワーク・プロセッサを、図17で言及したスタート・アップおよびシャット・ダウンの動作の代わりに、ステップ228でスリープ状態から復帰させ、ステップ240でスリープ状態に戻すことができる。更に別の実施形態では、ステップ226、228、240、および242が取り除かれ、ネットワーク・プロセッサおよびセンサ・プロセッサの双方が、プロセスの間、フルアップの動作(full up operation)を保つ。更に別の実施形態では、ステップ228および240が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサが単一のプロセッサに組み合わされる。この単一のプロセッサは、センサ・プロセッサのように、ステップ226でスリープ状態から復帰させ、ステップ242でスリープ状態に戻すか、または、プロセスの間はフルアップの動作を保たせることができる。
【0138】
図15、16、および17に関しては、例えば、トラッカ・タグ12’を、少なくとも定期的なステート変化の状態を作成するセルフ・テスト、および対応する定期的な電子メール・システムとの通信を定期的に行うように、プログラムすることができることに留意されたい。一実施形態では、追跡情報サーバ14(図1)は、
トラッカ・タグ12’の定期的なセルフ・テストの間隔内に、トラッカ・タグ12’への電子メールが、取り出されなかった場合に、トラッカ・タグ12’がシャット・ダウンされているか又は電子メール・システムとの通信ができないと判定することができる。従って、追跡情報サーバは、トラッカ・タグが電子メール・システムと通信中であることが期待されているときに通信していないという状況を、問題として識別し、保守要員がこの状況を調査できるようにすることができる。
【0139】
図18を参照すると、トラッカ・タグがデータ収集の状態に応答するプロセス250の一実施形態が、ステップ252で始まる。ステップ252では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。図17のステート変化の状態も完了していることが好ましい。次に、データ収集の状態が検出される(ステップ254)。1または複数のデータ収集の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的に、データ収集の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、データ収集の状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、データ収集の状態の検出は、現在のタグ・プロフィール内のデータ収集パラメータを、対応するセンサからの測定値またはGPS位置もしくは時間データと比較することによって行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のデータ収集パラメータと比較してデータ収集の状態を検出するためのアルゴリズムを含み、これには、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムが含まれる。
【0140】
ステップ256で、ステート変化の状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサは、現在のタグ・プロフィール内のプログラムされた命令に従って、センサ・データおよび/または位置および時間データの収集および格納を行う(ステップ258)。センサ・プロセッサは、センサ、位置、および時間のデータを、ローカルでの格納およびそれに続いての追跡情報サーバによる使用に適した情報に変換するためのアルゴリズムを含むことができる。例えば、上記の位置解明アルゴリズムは、生のGPS位置データをXYZデータまたはXYデータに変換する。
【0141】
ステップ260で、データ収集の状態が終わる。典型的に、これは、有効な測定値がセンサならびに/またはGPS位置および時間データから得られるように、単に、十分な時間が過ぎた後である。しかしながら、タグ・プロフィールは、データ収集の状態の終わりを、検出される様態で定義することができる。例えば、タグ・プロフィールは、温度が4.44℃(40°F)を越えてから4.44℃(40°F)を下回るまでの連続的なデータ収集のためのプログラムされた命令を含むことができる。データの収集および格納は、第1の条件が検出された後に始まり、第2の条件が検出されるまで続く。別の例では、タグ・プロフィールは、航空機の離陸(例えば、振動の測定)が検出された後の5分間のデータ収集を指定するプログラムされた命令を含むことができる。この例では、データ収集の状態は、例えば、ある振動測定値から検出され、5分経過した後に終わる。
【0142】
次に、センサ・プロセッサはスリープ状態に入る(ステップ262)。この時点から、プロセスは、別のデータ収集の状態が検出されると、ステップ254へ戻る。
データ収集の状態を取り扱うプロセスの別の実施形態では、ステップ256および262が取り除かれ、センサ・プロセッサは、プロセスの間はフルアップ動作を保つ。
【0143】
図19を参照すると、トラッカ・タグがデータ・ダウンロードの状態に応答するプロセス270の一実施形態が、ステップ272で始まる。ステップ257では、トラッカ・タグがパワー・アップされていること、および図16のパワー・アップ/リセットの状態が完了していることが仮定されている。図17のステート変化の状態も完了していることが好ましい。次に、データ・ダウンロードの状態が検出される(ステップ274)。1または複数のデータ収集の状態は、対応するトラッカ・タグの記憶装置内の現在のタグ・プロフィール内で定義される。典型的には、データ収集の状態は、トラッカ・タグ、資産、および/または輸送手段に関連するセンサに関連する位置、時間、温度、歪み、電圧、圧力、電場、セルフ・テスト、および他のパラメータに関して、定義される。位置および時間のパラメータは、GPS受信機によって受信される位置および時間データに関連することに留意されたい。そうでない場合、データ・ダウンロードの状態に関するパラメータは、対応するセンサによる測定値に関連する。従って、データ・ダウンロードの状態の検出は、現在のタグ・プロフィール内のデータ・ダウンロード・パラメータを、対応するセンサからの測定値またはGPSの位置データもしくは時間データと比較することによって、行われる。センサ・プロセッサは、センサ、位置、および時間のデータを、タグ・プロフィール内のデータ・ダウンロード・パラメータと比較してデータ・ダウンロードの状態を検出するためのアルゴリズムを含み、これは、測定されたデータおよび/またはパラメータを比較のために変換するアルゴリズムを含む。
【0144】
ステップ276で、データ・ダウンロードの状態が検出されると、センサ・プロセッサは、スリープ状態からウェイク・アップする。次に、センサ・プロセッサはネットワーク・プロセッサをスタート・アップする(ステップ278)。ステップ280で、ネットワーク・プロセッサは、追跡情報サーバ14(図1)との通信を開始する。次に、プロセスは、ネットワーク・プロセッサと追跡情報サーバとの間の通信が確立されていることを確認する(ステップ282)。通信が確認された場合、ステップ284で、ネットワーク・プロセッサは、検出されたデータ・ダウンロードの状態に関連したページを受信するためのタグ・プロフィールのプログラムされた命令において識別される1または複数のユーザへ、ページを送る。典型的には、ページは、トラッカ・タグ、資産、およびデータ・ダウンロードの状態を識別する、ユーザに対してのテキスト・メッセージである。テキスト・メッセージのユーザへの送付は、追跡情報サーバによって、ページング・システムを介して行うことができる。次に、センサ・プロセッサは、記憶装置のデータ・バッファに格納されたセンサ、位置、および時間のデータをネットワーク・プロセッサへ通信し、ネットワーク・プロセッサは、格納されたデータを追跡情報サーバ14(図1)へダウンロードする(ステップ286)。ステップ288で、ネットワーク・プロセッサは、追跡情報サーバとの通信を終了する。次に、センサ・プロセッサは、ネットワーク・プロセッサをシャット・ダウンする(ステップ290)。ステップ292で、センサ・プロセッサはスリープ状態に入る。この時点から、プロセスは、別のデータ・ダウンロードの状態が検出されると、ステップ274に戻る。
【0145】
ステップ282で、ネットワーク・プロセッサと追跡情報サーバとの間の通信が確認されなかった場合、ネットワーク・プロセッサは、トラッカ・タグのデータ通信リンクをリセットし、ステップ280に戻って再試行する(ステップ294)。
【0146】
データ・ダウンロードの状態を取り扱うプロセスの別の実施形態では、ページング・システムの代わりにテキスト・メッセージング・システムを使用することができる。更に別の実施形態では、ページング・システムの代わりに電子メール・システム(例えば、POP3電子メール・サーバ)を使用することができる。更に別の実施形態では、ページング、テキスト・メッセージング、および電子メールのシステムの組み合わせを使用して、テキスト・メッセージをユーザへ送ることができる。更に別の実施形態では、ネットワーク・プロセッサが別々の通信を開始してテキスト・メッセージを送り、格納されたデータをダウンロードすることができる。この実施形態では、テキスト・メッセージを、追跡情報サーバの代わりに、ページング・システム、テキスト・メッセージング・システム、および/または電子メール・システムに関連する独立のサービス・プロバイダへ通信することができる。
【0147】
データ・ダウンロードの状態を取り扱うためのプロセスの別の実施形態では、ネットワーク・プロセッサを、図19で言及したスタート・アップ動作およびシャット・ダウン動作の代わりに、ステップ278でスリープ状態から復帰させ、ステップ290でスリープ状態に戻すことができる。更に別の実施形態では、ステップ276、278、290、および292が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサとの双方が、プロセスの間はフルアップ動作を保つ。更に別の実施形態では、ステップ278および290が取り除かれ、ネットワーク・プロセッサとセンサ・プロセッサとが単一のプロセッサへと組み合わされる。この単一のプロセッサは、センサ・プロセッサのように、ステップ276でスリープ状態から復帰させ、ステップ292でスリープ状態に戻すか、または、プロセスの間にフルアップ動作を保たせることができる。
【0148】
一実施形態では、トラッカ・タグ12’(図15)は、パワー・アップ/リセット状態プロセス200(図16)、ステート変化状態プロセス220(図17)、データ収集状態プロセス250(図18)、およびデータ・ダウンロード状態プロセス(図19)を含むことができる。このコンフィギュレーションでは、最初に、パワー・アップ/リセット状態プロセス200が行われ、次いで、第1のステート変化の状態が検出されると、ステート変化状態プロセス220が行われる。次に、データの収集および格納を行うためにデータ収集状態プロセス250が行われる。これに、格納されたデータをトラッカ・タグから追跡情報サーバへダウンロードするデータ・ダウンロード状態プロセス270が続く。
【0149】
典型的には、タグ・プロフィール内のプログラムされた命令は、第1のステート変化の状態を引き起こすセンサ・データ、位置データまたは時間データにより、第1のデータ収集状態および第1のデータ・ダウンロード状態が検出されるようにもされる、というものである。例えば、プログラムされた命令は、振動センサに関連して、エンジン停止状態(engine off)からエンジン動作状態(engine running)への移行があるとき、およびエンジン動作状態からエンジン停止状態への移行があるときに、ステート変化の状態が検出されるように、指定することができる。また、プログラムされた命令は、振動のステート変化の状態が検出されたとき、およびその後のエンジンが動作している間の10分毎に、位置データおよび時間データに関するデータ収集の状態が検出されるように、指定することができる。更に、プログラムされた命令は、振動のステート変化の状態が検出されたとき、およびその後のエンジンが動作している間の2時間毎に、格納されたすべてのデータについてのデータ・ダウンロードの状態が検出されるように、指定することができる。
【0150】
ステート変化の状態をデータ収集の状態よりも先に、そしてデータ収集の状態をデータ・ダウンロードの状態よりも先に処理する優先方式を実装してもよい。この優先方式は、更に、複数のステート変化の状態、複数のデータ収集の状態、および複数のデータ・ダウンロードの状態を、早い者勝ち(a first in time basis)で処理するようにすることができる。一実施形態では、複数のデータ収集の状態を並列で処理することができる。
【0151】
図20を参照すると、トラッカ・タグに対するタグ・プロフィールをコンフィギュレーションするプロセス300の一実施形態が、ステップ302で始まり、ここでは、あるユーザが監視装置22(図1)を用いて追跡情報サーバ14(図11)のセキュリティ保護されていないエリア156(図11)にログインしている。ステップ304で、このユーザは、「タグ・プロフィールをコンフィギュレーションする」という機能またはオプションを選択する。次に、追跡情報サーバは、セキュリティ検査を行って、このユーザに追跡情報サーバのこのエリアにアクセスする許可が与えられていることを確認する(ステップ306)。ステップ308で、追跡情報サーバは、このユーザにタグ・プロフィールをコンフィギュレーションする許可が与えられているかどうかを判定する。次に、このユーザにタグ・プロフィールをコンフィギュレーションする許可が与えられている場合、追跡情報サーバは、監視装置上でこのユーザへトラッカ・タグ選択表示を提供する(ステップ310)。そうでない場合、このユーザは許可されていないため、プロセスはステップ302へ戻る。ステップ312で、このユーザは、トラッカ・タグ、所望のトラッカ・タグに関連する資産、またはタグ・プロフィールをコンフィギュレーションする所望のトラッカ・タグに関連するエレメントを選択する。次に、追跡情報サーバは、選択されたトラッカ・タグに対するタグ・プロフィールを、タグ・プロフィール・コンフィギュレーション表示で、このユーザに提供する(ステップ314)。ステップ316で、ユーザは、タグ・プロフィールをコンフィギュレーションするために、所望のステート変化状態、データ収集状態、および/またはデータ・ダウンロード状態を選択する。次に、ユーザが、所望のステート変化状態、データ収集状態、および/またはデータ・ダウンロード状態を保存すると、タグ・プロフィール内のプログラムされた命令が更新される(ステップ318)。ステップ320で、追跡情報サーバは、選択されたトラッカ・タグへのメッセージを、新しくコンフィギュレーションされたタグ・プロフィール付きで生成する。次に、追跡情報サーバは、そのメッセージを選択されたトラッカ・タグへ送信する(ステップ320)。
【0152】
タグ・プロフィール・コンフィギュレーション・プロセスの追加の一実施形態では、ユーザは、複数のタグ・プロフィールが共通にコンフィギュレーションされるときに、ステップ312で、複数のトラッカ・タグ、資産、またはエレメントからなるどのような組み合わせも選択することができる。これは、例えば、同様または類似のクラスの資産に対するタグ・プロフィールを共通にコンフィギュレーションすべき状況である、一群の航空機、トラック、または他のタイプの輸送手段に関するタグ・プロフィールのコンフィギュレーションに、有用である。ステップ310のトラッカ・タグ選択表示は、タグ・プロフィールのコンフィギュレーションのための複数のトラッカ・タグの選択を簡単にするために、資産のクラスおよびエレメントのクラスを含むことができる。複数のタグ・プロフィールを共通にコンフィギュレーションするときには、ステップ322におけるメッセージは複数の対応するトラッカ・タグへ送信される。
【0153】
タグ・プロフィール・コンフィギュレーション・プロセスの一実施形態では、メッセージは、選択されたトラッカ・タグに関連する電子メール・アドレスへ、電子メール・システム(例えば、POP3電子メール・サーバ)を介して送られる電子メール・メッセージとすることができる。別の実施形態では、メッセージは、選択されたトラッカ・タグに関連するテキスト・メッセージング・アドレスへ、テキスト・メッセージング・システムを介して送られるテキスト・メッセージとすることができる。更に別の実施形態では、メッセージは、選択されたトラッカ・タグへの直接のデータ通信とすることができる。電子メールおよび/またはテキスト・メッセージングのシステムは、追跡情報サーバ内部にあってもよく、または独立のサービス・プロバイダによって提供されるものでもよい。
【0154】
図21を参照すると、タグ・プロフィール79、104に含まれるプログラムされた命令(即ち、コマンドおよび制御情報)の例が示されている。これは、タグ・プロフィールが格納されているのが追跡情報サーバ内であるか(即ち、タグ・プロフィール104)、対応するトラッカ・タグへのメッセージ内であるか、トラッカ・タグ内であるか(即ち、タグ・プロフィール79)にかかわらず、この例示的なタグ・プロフィール内の、トラッカ・タグの動作を対象とするプログラムされた命令を反映している。タグ・プロフィールは、追跡情報サーバの動作を対象とするプログラムされた命令を含むこともできるに留意されたい。好適には、追跡情報サーバの動作を対象とするどのようなプログラムされた命令も、対応するトラッカ・タグへのメッセージ内のタグ・プロフィールから、およびトラッカ・タグ内に格納されたタグ・プロフィール79から、取り除かれる。タグ・プロフィールのこの例では、次のシンタックス規則が使用される。即ち、1)アンパーサンド(#)で始まる行はコメントである、2)行の終わりはセミコロン(;)で識別される、3)変数はパラメータから2つのコロン(::)で区切られる、4)パラメータ・フィールドはコンマ(,)で区切られる。もちろん、タグ・プロフィールに対してどのような適切なシンタックスを採用してもよく、特に、スクリプト・ファイルに対する一般的なシンタックス規則を採用してもよい。このタグ・プロフィールは、GPSの位置および時間データを受信するためのGPS受信機、振動センサ、および温度センサを含むトラッカ・タグ向けにコンフィギュレーションされている。他の実施形態では、トラッカ・タグは、1または複数の振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサの任意の組み合わせを含むことができる。
【0155】
このタグ・プロフィールの行1は、トラッカ・タグID 123456789を識別している。これは、一意のトラッカ・タグIDであり、このタグ・プロフィールと、一致するトラッカ・タグID78(図7)を有する或るトラッカ・タグの個体とを関連付ける。
【0156】
行2〜13では、ステート変化の状態を6つ定義している。この例示的な実施形態では、位置(行3)または時間(行4)に関するステート変化の状態はない。振動に関するステート変化の状態が2つある。第1の振動のステート変化の状態は、エンジン停止状態からエンジン動作状態への移行として定義されている(行5)。第2の振動のステート変化の状態は、エンジン動作状態からエンジン停止状態へ移行し、その後10分間停止状態を保つこととして定義されている(行6、7)。上記のように、トラッカ・タグ内の加速度計は、エンジン動作状態に伴う振動とエンジン停止状態に伴う振動とを区別することができる。エンジンがある期間停止状態を保っているのを待つことにより、例えば、トラックのエンジンが燃料補給のために短期間シャット・ダウンされているのに過ぎないときに、ステート変化の状態が検出されないことを保証する。そのような待機期間を、追跡されている資産に適するように調節または除去することができる。こうしたタイプの振動のステート変化の状態は、例えば、トラッカ・タグが関連付けられている資産のエンジン時間の記録および/または移動の追跡を行うのに、有用である。
【0157】
温度に関するステート変化の状態が2つある。第1の温度のステート変化の状態は、温度が4.44℃(40°F)を越える上昇移行として定義されている(行8)。第2の温度のステート変化の状態は、温度が4.44℃(40°F)より下へ下降移行し、その後5分間以上4.44℃(40°F)未満を保つこととして定義されている(行9、10)。温度センサは、4.44℃(40°F)より上と4.44℃(40°F)未満を区別することができる。温度が或る期間4.44℃(40°F)未満を保つのを待つことにより、温度の許容可能な変動に対してステート変化の状態が検出されないことを保証する。もちろん、温度の上側および/または下側の閾値について他の値を選択することもでき、また、監視されている資産に適するように待機期間を調節または除去することもできる。こうしたタイプの温度のステート変化の状態は、例えば、冷却用の貨物コンテナ、トラック、および貨車を監視するのに有用である。
【0158】
セルフ・テスト(自己試験)に関するステート変化の状態が2つある。1つはセルフ・テスト合格の結果に対するものであり(行11)、もう1つはセルフ・テスト失敗の結果に対するものである(行12)。何れのステート変化の状態に対してもページング命令はない(行13)。ページング命令を、任意のまたはすべてのステート変化の状態に付け加えることも可能である。例えば、ユーザ456がトラッカ・タグID123456789に対して責任をもつ整備技術者である状況において、セルフ・テスト失敗のステート変化の状態が生じるとユーザ456に対してページングを行うように、ページング命令を付け加えることも可能である。
【0159】
行14〜27では、データ収集の状態を6つ定義している。位置、時間、振動、温度、セルフ・テスト合格、およびセルフ・テスト失敗のデータの収集および格納に関連するデータ収集の状態がある。それぞれのデータ収集の状態は、それが関係するステート変化の状態を識別し、特定のタイプのデータの収集および格納のための追加の命令を提供する。位置のデータ収集の状態(行15、16)は、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の10分毎と定義されている。言い換えると、第1の位置のデータ収集の状態が検出されるのは、エンジン動作状態への移行の際の振動のステート変化の状態が検出されるときである。次いで、追加の位置のデータ収集の状態の検出が、エンジン停止状態への移行の際の振動のステート変化の状態が検出されるまで、10分毎に行われる。別の位置のデータ収集の状態が検出されるのは、エンジン停止状態の際の振動のステート変化の状態が検出されたときである。時間のデータ収集の状態(行17、18)も、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の10分毎と定義されている。これにより、エンジンが動作中の位置および時間のデータの収集および格納が調整される。このデータは、エンジン時間を記録するため、および資産の移動を追跡するために有用である。
【0160】
振動のデータ収集の状態(行19、20)は、それぞれの振動のステート変化の状態の際と定義されている。また、振動のデータ収集の状態は、位置および時間のデータも振動データと共に収集および格納する、という命令を含む。温度のデータ収集の状態(行21、22)は、それぞれの温度のステート変化の状態の際、およびその後の温度が4.44℃(40°F)を越えている間の5分毎と定義されている。また、温度のデータ収集の状態は、位置および時間のデータも温度データと共に収集および格納する、という命令を含む。セルフ・テスト合格のデータ収集の状態(行23、24)は、それぞれのセルフ・テスト合格のステート変化の状態の際と定義されている。また、セルフ・テスト合格のデータ収集の状態は、位置および時間のデータもセルフ・テスト合格のデータと共に収集および格納する、という命令を含む。セルフ・テスト合格のデータは、テストされたトラッカ・タグのエレメントおよび対応する合格結果を識別する情報を含むことができる。セルフ・テスト失敗のデータ収集の状態(行25、26)は、それぞれのセルフ・テスト失敗のステート変化の状態の際と定義されている。また、セルフ・テスト失敗のデータ収集の状態は、位置および時間のデータもセルフ・テスト失敗のデータと共に収集および格納する、という命令を含む。セルフ・テスト失敗のデータは、テストされたトラッカ・タグのエレメントおよび対応する合格結果または失敗結果を識別する情報を含むことができる。何れのデータ収集の状態に対してもページング命令はない(行27)。ページング命令を任意のまたはすべてのデータ収集の状態に対して付け加えることも可能である。
【0161】
行28〜39では、3つのデータ・ダウンロードの状態および2つのページング命令を定義している。この例示的な実施形態では、位置(行29)、時間(行30)、およびセルフ・テスト合格(行35)に関するデータ・ダウンロードの状態ははない。振動、温度、およびセルフ・テスト失敗のステート変化の状態に関連するデータ・ダウンロードの状態がある。それぞれのデータ・ダウンロードの状態は、それが関係するステート変化の状態を識別し、かつ特定のタイプのデータのダウンロードについての追加の命令を提供する。振動のデータのダウンロードの状態(行31、32)は、それぞれの振動のステート変化の状態の際、およびその後のエンジンが動作している間の8時間毎と定義されている。また、振動のデータ収集の状態は、すべての格納されたデータ(即ち、位置、時間、温度、セルフ・テスト合格、セルフ・テスト失敗)を振動データと共にダウンロードする、という命令を含む。温度のデータのダウンロードの状態(行33、34)は、それぞれの温度のステート変化の状態の際、およびその後の温度が4.44℃(40°F)を越えている間の5分毎と定義されている。また、温度のデータ収集の状態は、位置および時間のデータも温度データと共にダウンロードする、という命令を含む。セルフ・テスト失敗のデータのダウンロードの状態(行36、37)は、それぞれのセルフ・テスト失敗のステート変化の状態の際と定義されている。また、セルフ・テスト失敗のデータ・ダウンロードの状態は、位置および時間のデータもセルフ・テスト失敗のデータと共に収集および格納する、という命令を含む。
【0162】
データ・ダウンロードの状態に関する2つのページング命令がある。第1のページング命令は、データ・ダウンロードの状態すべてについてユーザ123に対してページングを行うこと、と指定している(行38)。ユーザ123は、例えば、トラッカ・タグID123456789の取り付けられた資産に関連する全ての活動の監視を割り当てられた者とすることができる。従って、新しい位置、時間、またはセンサのデータが追跡情報サーバへ提供されるときはいつでも、この適切な者に対するページングが行われ、それにより、その者は追跡情報サーバにログインして新しいデータを検査できる。次いで、この監視者は、適切な行動を取って、資産の更なる移動を調整することができる。第2のページング命令は、セルフ・テスト失敗のデータ・ダウンロードの状態についてユーザ456に対してページングを行うこと、と指定している(行39)。ユーザ456は、例えば、トラッカ・タグID123456789の保守を割り当てられた者とすることができる。従って、新しいセルフ・テスト失敗のデータが追跡情報サーバへ提供されるときはいつでも、この適切な者に対してのページングが行われ、それにより、その者は追跡情報サーバにログインして新しいデータを検出できる。次いで、この保守者は、適切な行動を取って、トラッカ・タグの更なる使用を調整し、その失敗の性質に基づいて保守のスケジュールを立てることができる。
【0163】
トラッカ・タグおよび追跡情報サーバを含む追跡システムに関して説明した様々な構成要素およびプロセスは、ハードウェア、ソフトウェア、データベース構造で、またはハードウェア、ソフトウェア、およびデータベース構造の適切な任意の組み合わせで、実装することができる。
【0164】
本発明は、例示的な実施形態とともに説明してきたが、多くの代替、変更、変形が当業者には明らかであることを理解されたい。従って、上記の説明における本発明の実施形態は、本発明の意図および範囲を限定するものではなく、例示的なものである。より具体的には、本発明は、本明細書に記載した例示的な実施形態すべての代替、変更、および変形を含むものとする。
【図面の簡単な説明】
【0165】
【図1】図1は、本発明を組み込んだ追跡システムの一実施形態のブロック図である。
【図2】図2は、本発明を組み込んだグローバル追跡システムの一実施形態のブロック図である。
【図3】図3は、地球の軌道上に複数の衛星を備えるGPS衛星コンステレーションを示す。
【図4】図4は、地球の軌道上に複数の衛星を備えるイリジウム衛星コンステレーションを示す。
【図5】図5は、様々な衛星コンステレーションの軌道高度を示す。
【図6】図6は、追跡システムの一実施形態の衛星通信の部分でのGPSデータの流れを示す。
【図7】図7は、トラッカ・タグの一実施形態のブロック図である。
【図8】図8は、トラッカ・タグの一実施形態の平面図を示す。
【図9】図9は、トラッカ・タグの一実施形態の平面図を示す。
【図10】図10は、トラッカ・タグの一実施形態の側面図を示す。
【図11】図11は、追跡情報サーバの一実施形態のブロック図である。
【図12】図12は、本発明の一態様による、道路地図および追跡情報を示す監視装置の表示の一部の一例を示す。
【図13】図13は、本発明を組み込んだ地域追跡システムの一実施形態のブロック図である。
【図14】図14は、本発明を組み込んだローカル追跡システムの一実施形態のブロック図である。
【図15】図15は、トラッカ・タグの別の実施形態のブロック図である。
【図16】図16は、パワー・アップ/リセット状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図17】図17は、ステート状態の変化に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図18】図18は、データ獲得状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図19】図19は、データ・ダウンロード状態に応答してのトラッカ・タグの動作の一実施形態のフロー・チャートである。
【図20】図20は、トラッカ・タグに関するステート変化の状態、データ獲得の状態、およびデータ・ダウンロードの状態をコンフィギュレーションし、そのコンフィギュレーションした状態をメッセージでトラッカ・タグへ送るための追跡情報サーバの動作の一実施形態のフロー・チャートである。
【図21】図21は、ステート変化の状態、データ獲得の状態、およびデータ・ダウンロードの状態に対するプログラムされた命令をもつ例示的なタグ・プロフィールである。
【特許請求の範囲】
【請求項1】
可動資産(16)を追跡し、追跡情報を監視装置(22)へ提供するための装置(10、26、170、176)であって、
グローバル・ポジショニング・システム衛星コンステレーション(24)の複数のグローバル・ポジショニング・システム衛星(240)から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグ(12、12’)であって、前記位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球(37)の中心に対する位置を表し、前記時間データは、前記位置データに関連する時刻を表し、前記トラッカ・タグは、前記可動資産の外部に沿って前記位置データおよび前記時間データの受信を容易にする場所に配置され、前記トラッカ・タグは、前記複数のグローバル・ポジショニング・システム衛星からの前記位置データを組み合わせ、組み合わされた位置データと時間データをデータ通信ネットワーク(18)を介して選択的に送信するものであり、前記トラッカ・タグは、コマンドおよび制御情報を伴うメッセージを前記データ通信ネットワークを介して選択的に取り出すように適合され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものである、トラッカ・タグと、
前記トラッカ・タグのコマンドおよび制御のための追跡情報サーバ(14)であって、前記追跡情報サーバは、コマンドおよび制御情報を伴うメッセージを前記トラッカ・タグへメッセージング・システム(93)を介して選択的に送信するように適合され、前記メッセージは、前記トラッカ・タグへ宛てられるものであり、前記メッセージング・システムは前記トラッカ・タグへ前記データ通信ネットワークを介してアクセス可能であり、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを前記トラッカ・タグから前記データ通信ネットワークを介して受信するように適合され、前記追跡情報サーバは、コマンドおよび制御情報を前記監視装置から追跡情報ネットワーク(20)を介して選択的に受信するように適合され、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを、プログラムされた命令およびコマンドおよび制御情報に基づいて選択的に処理して前記追跡情報を作成するように適合され、前記追跡情報は、前記資産と関連付けられ、前記追跡情報は前記監視装置へ前記追跡情報ネットワークを介して選択的にアクセス可能である、追跡情報サーバと、
を含む、装置。
【請求項2】
請求項1に記載の装置であって、前記メッセージング・システムは、電子メール・システム、テキスト・メッセージング・システム、およびページング・システムのうちの少なくとも1つを含む、装置。
【請求項3】
請求項2に記載の装置であって、前記追跡情報サーバは、少なくとも前記メッセージング・システムの前記電子メール・システムを含み、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連する、装置。
【請求項4】
請求項2に記載の装置であって、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連しており、かつ、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、装置。
【請求項5】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するための、および前記組み合わされた位置データおよび時間データを選択的に格納するための記憶装置(72)と、
前記グローバル・ポジショニング・システム受信機および記憶装置と通信するプロセッサ(70)であって、前記プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、プロセッサと
を含み、
前記トラッカ・タグは、それぞれのステート変化の状態が検出されると、新しいメッセージを前記メッセージング・システムから取り出すことを試み、前記プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記トラッカ・タグは、それぞれのデータ・ダウンロードの状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記追跡情報サーバへ送信する、
装置。
【請求項6】
請求項5に記載の装置であって、前記トラッカ・タグは、前記1または複数のステート変化の状態、1または複数のデータ収集の状態、および1または複数のデータ・ダウンロードの状態のうちの少なくとも1つが検出されると、前記監視装置と関連する1または複数の許可されたユーザへ前記メッセージング・システムを介してメッセージを選択的に送信するように適合される、装置。
【請求項7】
請求項6に記載の装置であって、前記メッセージング・システムは、ページング・システム、電子メール・システム、およびテキスト・メッセージング・システムのうちの少なくとも1つを含む、装置。
【請求項8】
請求項7に記載の装置であって、前記追跡情報サーバは少なくとも前記メッセージング・システムの前記ページング・システムを含み、前記ページング・システムは、ステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が検出されると前記監視装置の許可されたユーザへ送信される任意のメッセージと関連している、装置。
【請求項9】
請求項7に記載の装置であって、前記ページング・システムは、ステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が検出されると前記監視装置の許可されたユーザへ送信される前記任意のメッセージと関連しており、かつ、前記追跡情報サーバから独立したページング・サービス・プロバイダによって提供される、装置。
【請求項10】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データおよび時間データを選択的に格納するための記憶装置(72)と、
コマンドおよび制御情報を伴う新しいメッセージを前記メッセージング・システムから選択的に取り出すように、および前記組み合わされた位置データおよび時間データを前記追跡情報サーバへ選択的に送信するように適合されたネットワーク・プロセッサ(63)と、
前記グローバル・ポジショニング・システム受信機および記憶装置およびネットワーク・プロセッサと通信するセンサ・プロセッサ(71)であって、前記センサ・プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、センサ・プロセッサと
を含み、
前記センサ・プロセッサは、それぞれのステート変化の状態が検出されると、前記ネットワーク・プロセッサによる前記メッセージング・システムからの新しいメッセージの取り出しを開始し、前記センサ・プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記センサ・プロセッサは、それぞれのデータ・ダウンロードの状態が検出されると、前記ネットワーク・プロセッサによる前記追跡情報サーバへの前記組み合わされた位置データおよび時間データの少なくとも1つの送信を開始する、
装置。
【請求項11】
請求項10に記載の装置であって、前記トラッカ・タグは、
前記センサ・プロセッサと通信し、前記センサ・プロセッサと、前記資産および前記資産に関連する輸送手段のうちの少なくとも1つとの間の通信パスを提供するための資産通信インターフェイス(75)
を更に含む、装置。
【請求項12】
請求項11に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産センサおよび少なくとも1つの輸送手段のセンサ、ならびに前記輸送手段に関連する少なくとも1つの動作センサのうちの1または複数のものからセンサ情報を選択的に受信するように適合され、前記センサ・プロセッサは、前記センサ情報と、前記記憶装置に格納されたコマンドおよび制御情報に関連する対応する事前に決定された閾値とを比較して、前記1または複数のステート変化の状態、1または複数のデータ収集の状態、および1または複数のデータ・ダウンロードの状態のうちの少なくとも1つを検出する、装置。
【請求項13】
請求項12に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産制御装置および少なくとも1つの輸送手段制御装置のうちの1または複数のものへコマンドおよび制御情報を選択的に送信するように適合され、前記センサ・プロセッサは、また、前記位置データ、時間データ、およびセンサ情報のうちの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1または複数の資産/輸送手段の制御の状態を検出し、前記センサ・プロセッサは、それぞれの資産/輸送手段の制御の状態が検出されると、少なくとも1つの資産制御装置および少なくとも1つの輸送手段のうちの前記1または複数のものへ、資産/輸送手段の制御情報を送信して、前記資産および輸送手段のうちの少なくとも1つのものの動作の1または複数の状況を制御する、装置。
【請求項14】
請求項11に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産制御装置および少なくとも1つの輸送手段制御装置のうちの1または複数のものへコマンドおよび制御情報を選択的に送信するように適合され、前記センサ・プロセッサは、また、前記位置データおよび時間データのうちの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1または複数の資産/輸送手段の制御の状態を検出し、前記センサ・プロセッサは、それぞれの資産/輸送手段の制御の状態が検出されると、少なくとも1つの資産制御装置および少なくとも1つの輸送手段のうちの前記1または複数のものへ、資産/輸送手段の制御情報を送信して、前記資産および輸送手段のうちの少なくとも1つのものの動作の1または複数の状況を制御する、装置。
【請求項15】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
環境の状態を感知するための環境センサ(66)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データ、時間データ、および前記環境センサに関連するセンサ・データを選択的に格納するための記憶装置(72)と、
前記グローバル・ポジショニング・システム受信機、環境センサ、および記憶装置と通信するプロセッサ(70)であって、前記プロセッサは、前記環境センサからの測定値と、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、プロセッサと
を含み、
前記トラッカ・タグは、それぞれのステート変化の状態が検出されると、新しいメッセージを前記メッセージング・システムから取り出すことを試み、前記プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データ、時間データ、およびセンサ・データの少なくとも1つを前記データ・バッファに格納し、前記トラッカ・タグは、それぞれのデータ・ダウンロードの状態が検出されると、前記組み合わされた位置データ、時間データ、およびセンサ・データの少なくとも1つを前記追跡情報サーバへ送信する、
装置。
【請求項16】
請求項15に記載の装置であって、前記環境センサは、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサのうちの少なくとも1つを含む、装置。
【請求項17】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
環境の状態を感知するための環境センサ(66)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データおよび時間データおよび前記環境センサに関連するセンサ・データを選択的に格納するための記憶装置(72)と、
コマンドおよび制御情報を伴う新しいメッセージを前記メッセージング・システムから選択的に取り出すように、および前記組み合わされた位置データおよび時間データを前記追跡情報サーバへ選択的に送信するように適合されたネットワーク・プロセッサ(63)と、
前記グローバル・ポジショニング・システム受信機および記憶装置およびネットワーク・プロセッサと通信するセンサ・プロセッサ(71)であって、前記プロセッサは、前記環境センサからの測定値と、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、センサ・プロセッサと
を含み、
前記センサ・プロセッサは、それぞれのステート変化の状態が検出されると、前記ネットワーク・プロセッサによる前記メッセージング・システムからの新しいメッセージの取り出しを開始し、前記センサ・プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記センサ・プロセッサは、それぞれのデータ・ダウンロードの状態が検出されると、前記ネットワーク・プロセッサによる前記追跡情報サーバへの前記組み合わされた位置データおよび時間データの少なくとも1つの送信を開始する、
装置。
【請求項18】
請求項17に記載の装置であって、前記環境センサは、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサのうちの少なくとも1つを含む、装置。
【請求項19】
追跡システム(10、26、170、176)であって、
可動資産(16)に関連する追跡情報を表示するための監視装置(22)と、
前記追跡情報を前記監視装置へ通信するために前記監視装置と通信する追跡情報ネットワーク(20)と、
データ通信ネットワーク(18)と、
グローバル・ポジショニング・システム衛星コンステレーション(24)の複数のグローバル・ポジショニング・システム衛星(240)から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグ(12、12’)であって、前記位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球(37)の中心に対する位置を表し、前記時間データは、前記位置データに関連する時刻を表し、前記トラッカ・タグは、前記可動資産の外部に沿って前記位置データおよび時間データの受信を容易にする場所に配置され、前記トラッカ・タグは、前記複数のグローバル・ポジショニング・システム衛星からの前記位置データおよび時間データを組み合わせ、組み合わされた位置データおよび時間データを前記データ通信ネットワークを介して選択的に送信するものであり、前記トラッカ・タグは、コマンドおよび制御情報を前記データ通信ネットワークを介して選択的に取り出すものである、トラッカ・タグと、
前記トラッカ・タグのコマンドおよび制御のための追跡情報サーバ(14)であって、前記追跡情報サーバは、コマンドおよび制御情報を前記トラッカ・タグへメッセージング・システム(93)を介して選択的に送信し、前記メッセージは、前記トラッカ・タグへ宛てられるものであり、前記メッセージング・システムは前記トラッカ・タグへ前記データ通信ネットワークを介してアクセス可能であり、前記追跡情報サーバは、組み合わされた位置データおよび時間データを、前記トラッカ・タグから前記データ通信ネットワークを介して受信し、前記追跡情報サーバは、コマンドおよび制御情報を前記監視装置から前記追跡情報ネットワークを介して選択的に受信し、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを選択的に処理して前記追跡情報を作成し、前記追跡情報は前記監視装置へ前記追跡情報ネットワークを介して選択的にアクセス可能である、追跡情報サーバと、
を含む追跡システム。
【請求項20】
請求項1に記載の装置であって、前記メッセージング・システムは電子メール・システムを含む、装置。
【請求項21】
請求項20に記載の装置であって、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連している、装置。
【請求項22】
請求項21に記載の装置であって、前記電子メール・システムは、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、装置。
【請求項23】
追跡情報サーバと通信するトラッカ・タグを用いて可動資産に関連するセンサ・データを監視する方法であって、
a)トラッカ・タグを前記可動資産に取り付けるステップであって、前記トラッカ・タグは、前記可動資産の外部に沿った、前記資産の通常の移動の間に前記トラッカ・タグの視線が空へアクセスする場所に配置され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものであり、前記トラッカ・タグは、前記トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、前記追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初は前記インストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含む、ステップと、
b)次のタグ・プロフィールを作成するために前記追跡情報サーバで前記マスター・タグ・プロフィールの再コンフィギュレーションを行うステップであって、前記次のタグ・プロフィールは、前記トラッカ・タグの後続の動作を制御するためのプログラムされた命令を含む、ステップと、
c)前記次のタグ・プロフィールを前記トラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップであって、前記メッセージング・システムは前記トラッカ・タグへデータ通信ネットワークを介してアクセス可能である、ステップと、
d)前記トラッカ・タグをパワー・アップするステップと、
e)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、ステート変化の状態を前記トラッカ・タグで検出し、前記ステート変化の状態に応答するステップであって、前記ステート変化の状態への前記の応答は、前記次のタグ・プロフィールを伴う前記メッセージを前記メッセージング・システムから取り出すこと、および前記次のタグ・プロフィールを前記トラッカ・タグにインストールすることを含み、インストールがなされると、前記次のタグ・プロフィールが、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィールとなる、ステップと、
f)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、データ収集の状態を前記トラッカ・タグで検出し、前記データ収集の状態に応答するステップであって、前記データ収集の状態への前記の応答は、前記トラッカ・タグに関連する1または複数のセンサ、前記資産に関連する1または複数のセンサ、および前記資産に関連する輸送手段に関連する1または複数のセンサのうちの少なくとも1つのセンサに関連するセンサ・データを収集および格納することを含む、ステップと、
g)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、データ・ダウンロードの状態を前記トラッカ・タグで検出し、前記データ・ダウンロードの状態に応答するステップであって、前記データ・ダウンロードの状態への前記の応答は、格納された前記センサ・データを前記追跡情報サーバへ前記データ通信ネットワークを介してダウンロードすることを含み、前記追跡情報サーバは、ダウンロードされた前記センサ・データを処理してセンサ情報を作成し、前記センサ情報を監視装置上に追跡情報ネットワークを介して表示する、ステップと、
を含む方法。
【請求項24】
請求項23に記載の方法であって、前記メッセージング・システムは電子メール・システムである、方法。
【請求項25】
請求項24に記載の方法であって、前記電子メール・システムは前記追跡情報サーバに含まれる、方法。
【請求項26】
請求項24に記載の方法であって、前記電子メール・システムは、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、方法。
【請求項27】
請求項23に記載の方法であって、前記トラッカ・タグは、前記少なくとも1つのセンサと通信するプロセッサを含み、前記プロセッサは、前記少なくとも1つのセンサのうちの各センサからの測定値と、前記インストールされたタグ・プロフィール内の前記プログラムされた命令における事前に決定された閾値とを比較して、ステート変化、データ収集、およびデータ・ダウンロードの状態のそれぞれを検出する、方法。
【請求項28】
請求項23に記載の方法であって、ステップb)が下記のステップ、
h)前記マスター・タグ・プロフィールの再コンフィギュレーションを行うために前記監視装置のユーザから選択されたものを受け取るステップと、
i)前記ユーザに前記マスター・タグ・プロフィールの再コンフィギュレーションを行う許可が与えられている場合に、前記ユーザに、前記マスター・タグ・プロフィールの再コンフィギュレーションのために「タグ・プロフィールをコンフィギュレーション」表示を提供するステップと、
j)前記トラッカ・タグの後続の動作に関連する1または複数の所望されるステート変化の状態、1または複数の所望されるデータ収集の状態、および1または複数の所望されるデータ・ダウンロードの状態と関連して前記ユーザから1または複数の選択されたものを受け取るステップと、
k)所望されるステート変化、データ収集、およびデータ・ダウンロードの状態に基づいて前記マスター・タグ・プロフィール内の前記プログラムされた命令を更新することにより前記次のタグ・プロフィールを作成するステップと、
l)前記メッセージング・システムへ送信する前記次のタグ・プロフィールを伴う前記メッセージを生成するステップと
を更に含む、方法。
【請求項29】
請求項23に記載の方法であって、ステップd)が下記のステップ、
h)前記トラッカ・タグのセルフ・テストを行うステップと、
i)前記セルフ・テストに合格したか失敗したかを判定するステップであって、前記インストールされたタグ・プロフィール内の前記プログラムされた命令は、セルフ・テストに合格することに関するまたはセルフ・テストに失敗することに関するステート変化の状態を識別する、ステップと
を更に含む、方法。
【請求項30】
請求項23に記載の方法であって、ステップe)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてステート変化の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記ステート変化の状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信が確認された後に、前記トラッカ・タグへの新しいメッセージに関して検査し、新しいメッセージが見つかった場合には、前記新しいメッセージに関連する前記次のタグ・プロフィールを前記ネットワーク・プロセッサへアップロードするステップと、
l)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を終了するステップと、
m)前記次のタグ・プロフィールを前記ネットワーク・プロセッサから前記センサ・プロセッサへ渡し、前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)新しいメッセージがステップk)で見つかった場合に、前記次のタグ・プロフィールを前記センサ・プロセッサに関連する記憶装置にインストールするステップであって、インストール後に、前記トラッカ・タグの続いての動作にそれまで関連づけられていた前記次のタグ・プロフィールの前記プログラムされた命令は、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィール内の前記プログラムされた命令に変わる、ステップと、
o)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項31】
請求項23に記載の方法であって、ステップf)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ収集の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ収集の状態を検出したものである、ステップと、
i)前記インストールされたトラッカ・タグにおける前記プログラムされた命令に従って、前記トラッカ・タグ、資産、および輸送手段の少なくとも1つのセンサに関連するセンサ・データの収集および格納を行うステップと、
j)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項32】
請求項23に記載の方法であって、ステップg)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ・ダウンロードの状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ・ダウンロードの状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、格納された前記センサ・データを、前記センサ・プロセッサに関連する記憶装置から前記ネットワーク・プロセッサを通して前記追跡情報サーバへ、前記データ通信ネットワークを介してのダウンロードするステップと、
l)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を終了するステップと、
m)前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項33】
請求項32に記載の方法であって、ステップj)およびk)が下記のステップ、
o)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記監視装置に関連する1人または複数のユーザへ宛てられたページング・システムへのページの送信を行うステップ
を更に含む、方法。
【請求項34】
請求項33に記載の方法であって、前記ページング・システムは前記追跡情報サーバ内に含まれる、方法。
【請求項35】
請求項33に記載の方法であって、前記ページング・システムは、前記追跡情報サーバから独立したページング・サービス・プロバイダによって提供される、方法。
【請求項36】
追跡情報サーバと通信するトラッカ・タグを用いて可動資産を追跡する方法であって、
a)トラッカ・タグを前記可動資産に取り付けるステップであって、前記トラッカ・タグは、前記可動資産の外部に沿った、前記資産の通常の移動の間に前記トラッカ・タグの視線が空へアクセスする場所に配置され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものであり、前記トラッカ・タグは、前記トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、前記追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初は前記インストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含む、ステップと、
b)次のタグ・プロフィールを作成するために前記追跡情報サーバで前記マスター・タグ・プロフィールを再コンフィギュレーションするステップであって、前記次のタグ・プロフィールは、前記トラッカ・タグの後続の動作を制御するためのプログラムされた命令を含む、ステップと、
c)前記次のタグ・プロフィールを、メッセージング・システムを介してメッセージで前記トラッカ・タグへ選択的に送信するステップであって、前記メッセージング・システムはデータ通信ネットワークを介して前記トラッカ・タグへアクセス可能である、ステップと、
d)前記トラッカ・タグをパワー・アップするステップと、
e)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでステート変化の状態を検出し、前記ステート変化の状態に応答するステップであって、前記ステート変化の状態への前記の応答は、前記次のタグ・プロフィールを伴う前記メッセージを前記メッセージング・システムから取り出すこと、および前記次のタグ・プロフィールを前記トラッカ・タグにインストールすることを含み、インストールされると、前記次のタグ・プロフィールは、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィールとなる、ステップと、
f)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでデータ収集の状態を検出し、前記データ収集の状態に応答するステップであって、前記データ収集の状態への前記の応答は、前記トラッカ・タグのグローバル・ポジショニング・システム受信機に関連する位置データおよび時間データを収集および格納することを含む、ステップと、
g)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでデータ・ダウンロードの状態を検出し、前記データ・ダウンロードの状態に応答するステップであって、前記データ・ダウンロードの状態への前記の応答は、格納された前記位置データおよび時間データを前記追跡情報サーバへ前記データ通信ネットワークを介してダウンロードすることを含み、前記追跡情報サーバは、ダウンロードされた前記位置データおよび時間データを処理して追跡情報を作成し、前記追跡情報を監視装置上へ追跡情報ネットワークを介して表示する、ステップと
を含む方法。
【請求項37】
請求項36に記載の方法であって、前記トラッカ・タグは、前記グローバル・ポジショニング・システム受信機と通信するプロセッサを含み、前記プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記インストールされたタグ・プロフィール内の前記プログラムされた命令内の事前に決定された閾値とを比較して、ステート変化、データ収集、およびデータ・ダウンロードの状態のそれぞれを検出する、方法。
【請求項38】
請求項36に記載の方法であって、ステップe)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてステート変化の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記ステート変化の状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信が確認された後に、前記トラッカ・タグへの新しいメッセージに関して検査し、新しいメッセージが見つかった場合には、前記新しいメッセージに関連する前記次のタグ・プロフィールを前記ネットワーク・プロセッサへアップロードするステップと、
l)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を終了するステップと、
m)前記次のタグ・プロフィールを前記ネットワーク・プロセッサから前記センサ・プロセッサへ渡し、前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)新しいメッセージがステップk)で見つかった場合に、前記次のタグ・プロフィールを前記センサ・プロセッサに関連する記憶装置にインストールするステップであって、インストールされると、前記トラッカ・タグの後続の動作にそれまで関連づけられていた前記次のタグ・プロフィールの前記プログラムされた命令は、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィール内の前記プログラムされた命令に変わる、ステップと、
o)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項39】
請求項36に記載の方法であって、ステップf)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ収集の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ収集の状態を検出したものである、ステップと、
i)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って前記位置データおよび時間データの収集および格納を行うステップと、
j)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項40】
請求項36に記載の方法であって、ステップg)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、
前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ・ダウンロードの状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ・ダウンロードの状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、格納された前記位置データおよび時間データを、前記センサ・プロセッサに関連する記憶装置から前記ネットワーク・プロセッサを通して前記追跡情報サーバへ、前記データ通信ネットワークを介してダウンロードするステップと、
l)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を終了するステップと、
m)前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項1】
可動資産(16)を追跡し、追跡情報を監視装置(22)へ提供するための装置(10、26、170、176)であって、
グローバル・ポジショニング・システム衛星コンステレーション(24)の複数のグローバル・ポジショニング・システム衛星(240)から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグ(12、12’)であって、前記位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球(37)の中心に対する位置を表し、前記時間データは、前記位置データに関連する時刻を表し、前記トラッカ・タグは、前記可動資産の外部に沿って前記位置データおよび前記時間データの受信を容易にする場所に配置され、前記トラッカ・タグは、前記複数のグローバル・ポジショニング・システム衛星からの前記位置データを組み合わせ、組み合わされた位置データと時間データをデータ通信ネットワーク(18)を介して選択的に送信するものであり、前記トラッカ・タグは、コマンドおよび制御情報を伴うメッセージを前記データ通信ネットワークを介して選択的に取り出すように適合され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものである、トラッカ・タグと、
前記トラッカ・タグのコマンドおよび制御のための追跡情報サーバ(14)であって、前記追跡情報サーバは、コマンドおよび制御情報を伴うメッセージを前記トラッカ・タグへメッセージング・システム(93)を介して選択的に送信するように適合され、前記メッセージは、前記トラッカ・タグへ宛てられるものであり、前記メッセージング・システムは前記トラッカ・タグへ前記データ通信ネットワークを介してアクセス可能であり、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを前記トラッカ・タグから前記データ通信ネットワークを介して受信するように適合され、前記追跡情報サーバは、コマンドおよび制御情報を前記監視装置から追跡情報ネットワーク(20)を介して選択的に受信するように適合され、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを、プログラムされた命令およびコマンドおよび制御情報に基づいて選択的に処理して前記追跡情報を作成するように適合され、前記追跡情報は、前記資産と関連付けられ、前記追跡情報は前記監視装置へ前記追跡情報ネットワークを介して選択的にアクセス可能である、追跡情報サーバと、
を含む、装置。
【請求項2】
請求項1に記載の装置であって、前記メッセージング・システムは、電子メール・システム、テキスト・メッセージング・システム、およびページング・システムのうちの少なくとも1つを含む、装置。
【請求項3】
請求項2に記載の装置であって、前記追跡情報サーバは、少なくとも前記メッセージング・システムの前記電子メール・システムを含み、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連する、装置。
【請求項4】
請求項2に記載の装置であって、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連しており、かつ、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、装置。
【請求項5】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するための、および前記組み合わされた位置データおよび時間データを選択的に格納するための記憶装置(72)と、
前記グローバル・ポジショニング・システム受信機および記憶装置と通信するプロセッサ(70)であって、前記プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、プロセッサと
を含み、
前記トラッカ・タグは、それぞれのステート変化の状態が検出されると、新しいメッセージを前記メッセージング・システムから取り出すことを試み、前記プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記トラッカ・タグは、それぞれのデータ・ダウンロードの状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記追跡情報サーバへ送信する、
装置。
【請求項6】
請求項5に記載の装置であって、前記トラッカ・タグは、前記1または複数のステート変化の状態、1または複数のデータ収集の状態、および1または複数のデータ・ダウンロードの状態のうちの少なくとも1つが検出されると、前記監視装置と関連する1または複数の許可されたユーザへ前記メッセージング・システムを介してメッセージを選択的に送信するように適合される、装置。
【請求項7】
請求項6に記載の装置であって、前記メッセージング・システムは、ページング・システム、電子メール・システム、およびテキスト・メッセージング・システムのうちの少なくとも1つを含む、装置。
【請求項8】
請求項7に記載の装置であって、前記追跡情報サーバは少なくとも前記メッセージング・システムの前記ページング・システムを含み、前記ページング・システムは、ステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が検出されると前記監視装置の許可されたユーザへ送信される任意のメッセージと関連している、装置。
【請求項9】
請求項7に記載の装置であって、前記ページング・システムは、ステート変化の状態、データ収集の状態、およびデータ・ダウンロードの状態が検出されると前記監視装置の許可されたユーザへ送信される前記任意のメッセージと関連しており、かつ、前記追跡情報サーバから独立したページング・サービス・プロバイダによって提供される、装置。
【請求項10】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データおよび時間データを選択的に格納するための記憶装置(72)と、
コマンドおよび制御情報を伴う新しいメッセージを前記メッセージング・システムから選択的に取り出すように、および前記組み合わされた位置データおよび時間データを前記追跡情報サーバへ選択的に送信するように適合されたネットワーク・プロセッサ(63)と、
前記グローバル・ポジショニング・システム受信機および記憶装置およびネットワーク・プロセッサと通信するセンサ・プロセッサ(71)であって、前記センサ・プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、センサ・プロセッサと
を含み、
前記センサ・プロセッサは、それぞれのステート変化の状態が検出されると、前記ネットワーク・プロセッサによる前記メッセージング・システムからの新しいメッセージの取り出しを開始し、前記センサ・プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記センサ・プロセッサは、それぞれのデータ・ダウンロードの状態が検出されると、前記ネットワーク・プロセッサによる前記追跡情報サーバへの前記組み合わされた位置データおよび時間データの少なくとも1つの送信を開始する、
装置。
【請求項11】
請求項10に記載の装置であって、前記トラッカ・タグは、
前記センサ・プロセッサと通信し、前記センサ・プロセッサと、前記資産および前記資産に関連する輸送手段のうちの少なくとも1つとの間の通信パスを提供するための資産通信インターフェイス(75)
を更に含む、装置。
【請求項12】
請求項11に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産センサおよび少なくとも1つの輸送手段のセンサ、ならびに前記輸送手段に関連する少なくとも1つの動作センサのうちの1または複数のものからセンサ情報を選択的に受信するように適合され、前記センサ・プロセッサは、前記センサ情報と、前記記憶装置に格納されたコマンドおよび制御情報に関連する対応する事前に決定された閾値とを比較して、前記1または複数のステート変化の状態、1または複数のデータ収集の状態、および1または複数のデータ・ダウンロードの状態のうちの少なくとも1つを検出する、装置。
【請求項13】
請求項12に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産制御装置および少なくとも1つの輸送手段制御装置のうちの1または複数のものへコマンドおよび制御情報を選択的に送信するように適合され、前記センサ・プロセッサは、また、前記位置データ、時間データ、およびセンサ情報のうちの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1または複数の資産/輸送手段の制御の状態を検出し、前記センサ・プロセッサは、それぞれの資産/輸送手段の制御の状態が検出されると、少なくとも1つの資産制御装置および少なくとも1つの輸送手段のうちの前記1または複数のものへ、資産/輸送手段の制御情報を送信して、前記資産および輸送手段のうちの少なくとも1つのものの動作の1または複数の状況を制御する、装置。
【請求項14】
請求項11に記載の装置であって、前記資産通信インターフェイスは、少なくとも1つの資産制御装置および少なくとも1つの輸送手段制御装置のうちの1または複数のものへコマンドおよび制御情報を選択的に送信するように適合され、前記センサ・プロセッサは、また、前記位置データおよび時間データのうちの少なくとも1つと、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1または複数の資産/輸送手段の制御の状態を検出し、前記センサ・プロセッサは、それぞれの資産/輸送手段の制御の状態が検出されると、少なくとも1つの資産制御装置および少なくとも1つの輸送手段のうちの前記1または複数のものへ、資産/輸送手段の制御情報を送信して、前記資産および輸送手段のうちの少なくとも1つのものの動作の1または複数の状況を制御する、装置。
【請求項15】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
環境の状態を感知するための環境センサ(66)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データ、時間データ、および前記環境センサに関連するセンサ・データを選択的に格納するための記憶装置(72)と、
前記グローバル・ポジショニング・システム受信機、環境センサ、および記憶装置と通信するプロセッサ(70)であって、前記プロセッサは、前記環境センサからの測定値と、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して、1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、プロセッサと
を含み、
前記トラッカ・タグは、それぞれのステート変化の状態が検出されると、新しいメッセージを前記メッセージング・システムから取り出すことを試み、前記プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データ、時間データ、およびセンサ・データの少なくとも1つを前記データ・バッファに格納し、前記トラッカ・タグは、それぞれのデータ・ダウンロードの状態が検出されると、前記組み合わされた位置データ、時間データ、およびセンサ・データの少なくとも1つを前記追跡情報サーバへ送信する、
装置。
【請求項16】
請求項15に記載の装置であって、前記環境センサは、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサのうちの少なくとも1つを含む、装置。
【請求項17】
請求項1に記載の装置であって、前記トラッカ・タグは、
前記位置データおよび時間データを選択的に受信するように適合されたグローバル・ポジショニング・システム受信機(65)と、
環境の状態を感知するための環境センサ(66)と、
前記トラッカ・タグの動作に関連するコマンドおよび制御情報を格納するため、および前記組み合わされた位置データおよび時間データおよび前記環境センサに関連するセンサ・データを選択的に格納するための記憶装置(72)と、
コマンドおよび制御情報を伴う新しいメッセージを前記メッセージング・システムから選択的に取り出すように、および前記組み合わされた位置データおよび時間データを前記追跡情報サーバへ選択的に送信するように適合されたネットワーク・プロセッサ(63)と、
前記グローバル・ポジショニング・システム受信機および記憶装置およびネットワーク・プロセッサと通信するセンサ・プロセッサ(71)であって、前記プロセッサは、前記環境センサからの測定値と、前記記憶装置に格納されたコマンドおよび制御情報に関連する事前に決定された閾値とを比較して1組の状態のうちの少なくとも1つを検出するものであり、前記1組の状態は、i)1または複数のステート変化の状態、ii)1または複数のデータ収集の状態、および、iii)1または複数のデータ・ダウンロードの状態を含む、センサ・プロセッサと
を含み、
前記センサ・プロセッサは、それぞれのステート変化の状態が検出されると、前記ネットワーク・プロセッサによる前記メッセージング・システムからの新しいメッセージの取り出しを開始し、前記センサ・プロセッサは、それぞれのデータ収集の状態が検出されると、前記組み合わされた位置データおよび時間データの少なくとも1つを前記データ・バッファに格納し、前記センサ・プロセッサは、それぞれのデータ・ダウンロードの状態が検出されると、前記ネットワーク・プロセッサによる前記追跡情報サーバへの前記組み合わされた位置データおよび時間データの少なくとも1つの送信を開始する、
装置。
【請求項18】
請求項17に記載の装置であって、前記環境センサは、振動センサ、温度センサ、歪みゲージ、電圧センサ、圧力センサ、および電場センサのうちの少なくとも1つを含む、装置。
【請求項19】
追跡システム(10、26、170、176)であって、
可動資産(16)に関連する追跡情報を表示するための監視装置(22)と、
前記追跡情報を前記監視装置へ通信するために前記監視装置と通信する追跡情報ネットワーク(20)と、
データ通信ネットワーク(18)と、
グローバル・ポジショニング・システム衛星コンステレーション(24)の複数のグローバル・ポジショニング・システム衛星(240)から位置データおよび時間データを選択的に受信するように適合されたトラッカ・タグ(12、12’)であって、前記位置データは、受信されたデータの発信元の各グローバル・ポジショニング・システム衛星の地球(37)の中心に対する位置を表し、前記時間データは、前記位置データに関連する時刻を表し、前記トラッカ・タグは、前記可動資産の外部に沿って前記位置データおよび時間データの受信を容易にする場所に配置され、前記トラッカ・タグは、前記複数のグローバル・ポジショニング・システム衛星からの前記位置データおよび時間データを組み合わせ、組み合わされた位置データおよび時間データを前記データ通信ネットワークを介して選択的に送信するものであり、前記トラッカ・タグは、コマンドおよび制御情報を前記データ通信ネットワークを介して選択的に取り出すものである、トラッカ・タグと、
前記トラッカ・タグのコマンドおよび制御のための追跡情報サーバ(14)であって、前記追跡情報サーバは、コマンドおよび制御情報を前記トラッカ・タグへメッセージング・システム(93)を介して選択的に送信し、前記メッセージは、前記トラッカ・タグへ宛てられるものであり、前記メッセージング・システムは前記トラッカ・タグへ前記データ通信ネットワークを介してアクセス可能であり、前記追跡情報サーバは、組み合わされた位置データおよび時間データを、前記トラッカ・タグから前記データ通信ネットワークを介して受信し、前記追跡情報サーバは、コマンドおよび制御情報を前記監視装置から前記追跡情報ネットワークを介して選択的に受信し、前記追跡情報サーバは、前記組み合わされた位置データおよび時間データを選択的に処理して前記追跡情報を作成し、前記追跡情報は前記監視装置へ前記追跡情報ネットワークを介して選択的にアクセス可能である、追跡情報サーバと、
を含む追跡システム。
【請求項20】
請求項1に記載の装置であって、前記メッセージング・システムは電子メール・システムを含む、装置。
【請求項21】
請求項20に記載の装置であって、前記電子メール・システムは、前記コマンドおよび制御情報を含む前記メッセージと関連している、装置。
【請求項22】
請求項21に記載の装置であって、前記電子メール・システムは、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、装置。
【請求項23】
追跡情報サーバと通信するトラッカ・タグを用いて可動資産に関連するセンサ・データを監視する方法であって、
a)トラッカ・タグを前記可動資産に取り付けるステップであって、前記トラッカ・タグは、前記可動資産の外部に沿った、前記資産の通常の移動の間に前記トラッカ・タグの視線が空へアクセスする場所に配置され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものであり、前記トラッカ・タグは、前記トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、前記追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初は前記インストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含む、ステップと、
b)次のタグ・プロフィールを作成するために前記追跡情報サーバで前記マスター・タグ・プロフィールの再コンフィギュレーションを行うステップであって、前記次のタグ・プロフィールは、前記トラッカ・タグの後続の動作を制御するためのプログラムされた命令を含む、ステップと、
c)前記次のタグ・プロフィールを前記トラッカ・タグへ、メッセージング・システムを介してメッセージで選択的に送信するステップであって、前記メッセージング・システムは前記トラッカ・タグへデータ通信ネットワークを介してアクセス可能である、ステップと、
d)前記トラッカ・タグをパワー・アップするステップと、
e)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、ステート変化の状態を前記トラッカ・タグで検出し、前記ステート変化の状態に応答するステップであって、前記ステート変化の状態への前記の応答は、前記次のタグ・プロフィールを伴う前記メッセージを前記メッセージング・システムから取り出すこと、および前記次のタグ・プロフィールを前記トラッカ・タグにインストールすることを含み、インストールがなされると、前記次のタグ・プロフィールが、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィールとなる、ステップと、
f)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、データ収集の状態を前記トラッカ・タグで検出し、前記データ収集の状態に応答するステップであって、前記データ収集の状態への前記の応答は、前記トラッカ・タグに関連する1または複数のセンサ、前記資産に関連する1または複数のセンサ、および前記資産に関連する輸送手段に関連する1または複数のセンサのうちの少なくとも1つのセンサに関連するセンサ・データを収集および格納することを含む、ステップと、
g)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、データ・ダウンロードの状態を前記トラッカ・タグで検出し、前記データ・ダウンロードの状態に応答するステップであって、前記データ・ダウンロードの状態への前記の応答は、格納された前記センサ・データを前記追跡情報サーバへ前記データ通信ネットワークを介してダウンロードすることを含み、前記追跡情報サーバは、ダウンロードされた前記センサ・データを処理してセンサ情報を作成し、前記センサ情報を監視装置上に追跡情報ネットワークを介して表示する、ステップと、
を含む方法。
【請求項24】
請求項23に記載の方法であって、前記メッセージング・システムは電子メール・システムである、方法。
【請求項25】
請求項24に記載の方法であって、前記電子メール・システムは前記追跡情報サーバに含まれる、方法。
【請求項26】
請求項24に記載の方法であって、前記電子メール・システムは、前記追跡情報サーバから独立した電子メール・サービス・プロバイダによって提供される、方法。
【請求項27】
請求項23に記載の方法であって、前記トラッカ・タグは、前記少なくとも1つのセンサと通信するプロセッサを含み、前記プロセッサは、前記少なくとも1つのセンサのうちの各センサからの測定値と、前記インストールされたタグ・プロフィール内の前記プログラムされた命令における事前に決定された閾値とを比較して、ステート変化、データ収集、およびデータ・ダウンロードの状態のそれぞれを検出する、方法。
【請求項28】
請求項23に記載の方法であって、ステップb)が下記のステップ、
h)前記マスター・タグ・プロフィールの再コンフィギュレーションを行うために前記監視装置のユーザから選択されたものを受け取るステップと、
i)前記ユーザに前記マスター・タグ・プロフィールの再コンフィギュレーションを行う許可が与えられている場合に、前記ユーザに、前記マスター・タグ・プロフィールの再コンフィギュレーションのために「タグ・プロフィールをコンフィギュレーション」表示を提供するステップと、
j)前記トラッカ・タグの後続の動作に関連する1または複数の所望されるステート変化の状態、1または複数の所望されるデータ収集の状態、および1または複数の所望されるデータ・ダウンロードの状態と関連して前記ユーザから1または複数の選択されたものを受け取るステップと、
k)所望されるステート変化、データ収集、およびデータ・ダウンロードの状態に基づいて前記マスター・タグ・プロフィール内の前記プログラムされた命令を更新することにより前記次のタグ・プロフィールを作成するステップと、
l)前記メッセージング・システムへ送信する前記次のタグ・プロフィールを伴う前記メッセージを生成するステップと
を更に含む、方法。
【請求項29】
請求項23に記載の方法であって、ステップd)が下記のステップ、
h)前記トラッカ・タグのセルフ・テストを行うステップと、
i)前記セルフ・テストに合格したか失敗したかを判定するステップであって、前記インストールされたタグ・プロフィール内の前記プログラムされた命令は、セルフ・テストに合格することに関するまたはセルフ・テストに失敗することに関するステート変化の状態を識別する、ステップと
を更に含む、方法。
【請求項30】
請求項23に記載の方法であって、ステップe)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてステート変化の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記ステート変化の状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信が確認された後に、前記トラッカ・タグへの新しいメッセージに関して検査し、新しいメッセージが見つかった場合には、前記新しいメッセージに関連する前記次のタグ・プロフィールを前記ネットワーク・プロセッサへアップロードするステップと、
l)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を終了するステップと、
m)前記次のタグ・プロフィールを前記ネットワーク・プロセッサから前記センサ・プロセッサへ渡し、前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)新しいメッセージがステップk)で見つかった場合に、前記次のタグ・プロフィールを前記センサ・プロセッサに関連する記憶装置にインストールするステップであって、インストール後に、前記トラッカ・タグの続いての動作にそれまで関連づけられていた前記次のタグ・プロフィールの前記プログラムされた命令は、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィール内の前記プログラムされた命令に変わる、ステップと、
o)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項31】
請求項23に記載の方法であって、ステップf)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ収集の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ収集の状態を検出したものである、ステップと、
i)前記インストールされたトラッカ・タグにおける前記プログラムされた命令に従って、前記トラッカ・タグ、資産、および輸送手段の少なくとも1つのセンサに関連するセンサ・データの収集および格納を行うステップと、
j)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項32】
請求項23に記載の方法であって、ステップg)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ・ダウンロードの状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ・ダウンロードの状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、格納された前記センサ・データを、前記センサ・プロセッサに関連する記憶装置から前記ネットワーク・プロセッサを通して前記追跡情報サーバへ、前記データ通信ネットワークを介してのダウンロードするステップと、
l)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を終了するステップと、
m)前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項33】
請求項32に記載の方法であって、ステップj)およびk)が下記のステップ、
o)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記監視装置に関連する1人または複数のユーザへ宛てられたページング・システムへのページの送信を行うステップ
を更に含む、方法。
【請求項34】
請求項33に記載の方法であって、前記ページング・システムは前記追跡情報サーバ内に含まれる、方法。
【請求項35】
請求項33に記載の方法であって、前記ページング・システムは、前記追跡情報サーバから独立したページング・サービス・プロバイダによって提供される、方法。
【請求項36】
追跡情報サーバと通信するトラッカ・タグを用いて可動資産を追跡する方法であって、
a)トラッカ・タグを前記可動資産に取り付けるステップであって、前記トラッカ・タグは、前記可動資産の外部に沿った、前記資産の通常の移動の間に前記トラッカ・タグの視線が空へアクセスする場所に配置され、前記トラッカ・タグは、前記資産に関連する装置からは操作できないものであり、前記トラッカ・タグは、前記トラッカ・タグの現在の動作を制御するプログラムされた命令を含むインストールされたタグ・プロフィールを含み、前記追跡情報サーバは、再コンフィギュレーション可能であり且つ少なくとも最初は前記インストールされたタグ・プロフィールと同じであるマスター・タグ・プロフィールを含む、ステップと、
b)次のタグ・プロフィールを作成するために前記追跡情報サーバで前記マスター・タグ・プロフィールを再コンフィギュレーションするステップであって、前記次のタグ・プロフィールは、前記トラッカ・タグの後続の動作を制御するためのプログラムされた命令を含む、ステップと、
c)前記次のタグ・プロフィールを、メッセージング・システムを介してメッセージで前記トラッカ・タグへ選択的に送信するステップであって、前記メッセージング・システムはデータ通信ネットワークを介して前記トラッカ・タグへアクセス可能である、ステップと、
d)前記トラッカ・タグをパワー・アップするステップと、
e)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでステート変化の状態を検出し、前記ステート変化の状態に応答するステップであって、前記ステート変化の状態への前記の応答は、前記次のタグ・プロフィールを伴う前記メッセージを前記メッセージング・システムから取り出すこと、および前記次のタグ・プロフィールを前記トラッカ・タグにインストールすることを含み、インストールされると、前記次のタグ・プロフィールは、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィールとなる、ステップと、
f)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでデータ収集の状態を検出し、前記データ収集の状態に応答するステップであって、前記データ収集の状態への前記の応答は、前記トラッカ・タグのグローバル・ポジショニング・システム受信機に関連する位置データおよび時間データを収集および格納することを含む、ステップと、
g)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って、前記トラッカ・タグでデータ・ダウンロードの状態を検出し、前記データ・ダウンロードの状態に応答するステップであって、前記データ・ダウンロードの状態への前記の応答は、格納された前記位置データおよび時間データを前記追跡情報サーバへ前記データ通信ネットワークを介してダウンロードすることを含み、前記追跡情報サーバは、ダウンロードされた前記位置データおよび時間データを処理して追跡情報を作成し、前記追跡情報を監視装置上へ追跡情報ネットワークを介して表示する、ステップと
を含む方法。
【請求項37】
請求項36に記載の方法であって、前記トラッカ・タグは、前記グローバル・ポジショニング・システム受信機と通信するプロセッサを含み、前記プロセッサは、前記位置データおよび時間データの少なくとも1つと、前記インストールされたタグ・プロフィール内の前記プログラムされた命令内の事前に決定された閾値とを比較して、ステート変化、データ収集、およびデータ・ダウンロードの状態のそれぞれを検出する、方法。
【請求項38】
請求項36に記載の方法であって、ステップe)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてステート変化の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記ステート変化の状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信が確認された後に、前記トラッカ・タグへの新しいメッセージに関して検査し、新しいメッセージが見つかった場合には、前記新しいメッセージに関連する前記次のタグ・プロフィールを前記ネットワーク・プロセッサへアップロードするステップと、
l)前記ネットワーク・プロセッサと前記メッセージング・システムとの間の通信を終了するステップと、
m)前記次のタグ・プロフィールを前記ネットワーク・プロセッサから前記センサ・プロセッサへ渡し、前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)新しいメッセージがステップk)で見つかった場合に、前記次のタグ・プロフィールを前記センサ・プロセッサに関連する記憶装置にインストールするステップであって、インストールされると、前記トラッカ・タグの後続の動作にそれまで関連づけられていた前記次のタグ・プロフィールの前記プログラムされた命令は、前記トラッカ・タグの現在の動作の制御のための前記インストールされたタグ・プロフィール内の前記プログラムされた命令に変わる、ステップと、
o)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項39】
請求項36に記載の方法であって、ステップf)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ収集の状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ収集の状態を検出したものである、ステップと、
i)前記インストールされたタグ・プロフィール内の前記プログラムされた命令に従って前記位置データおよび時間データの収集および格納を行うステップと、
j)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【請求項40】
請求項36に記載の方法であって、ステップg)が下記のステップ、
h)前記トラッカ・タグのセンサ・プロセッサをウェイク・アップさせるステップであって、前記センサ・プロセッサは、
前記インストールされたタグ・プロフィールに関連する前記プログラムされた命令においてデータ・ダウンロードの状態として識別される少なくとも1つのパラメータを検出することに基づいて前記データ・ダウンロードの状態を検出したものである、ステップと、
i)前記トラッカ・タグのネットワーク・プロセッサを起動するステップと、
j)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を開始するステップと、
k)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信が確認された後に、格納された前記位置データおよび時間データを、前記センサ・プロセッサに関連する記憶装置から前記ネットワーク・プロセッサを通して前記追跡情報サーバへ、前記データ通信ネットワークを介してダウンロードするステップと、
l)前記ネットワーク・プロセッサと前記追跡情報サーバとの間の通信を終了するステップと、
m)前記ネットワーク・プロセッサをシャット・ダウンするステップと、
n)前記センサの処理をスリープ状態に置くステップと
を更に含む、方法。
【図1】

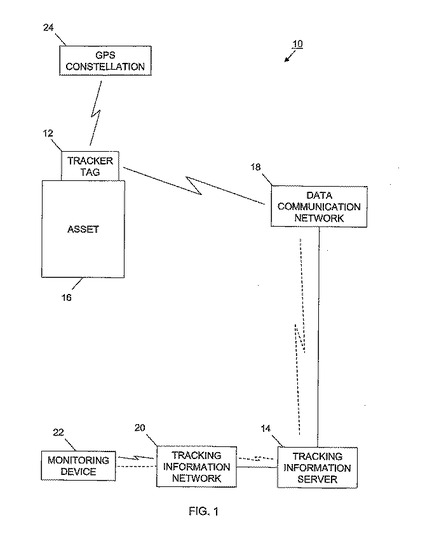
【図2】
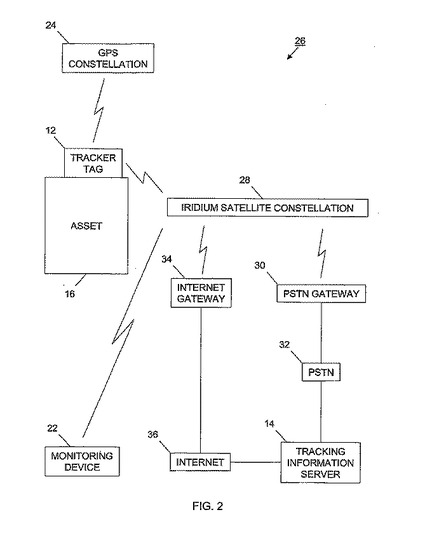
【図3】
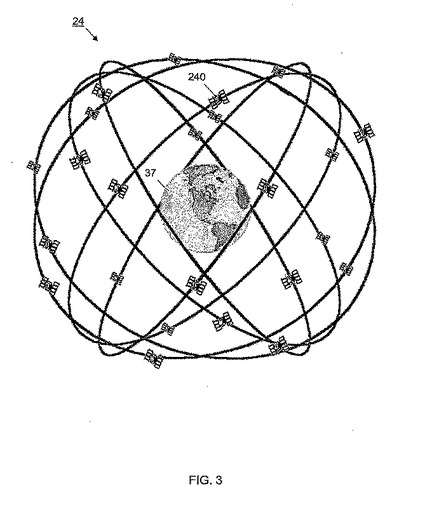
【図4】
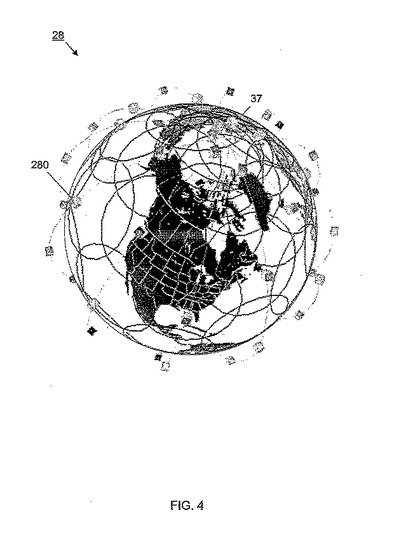
【図5】
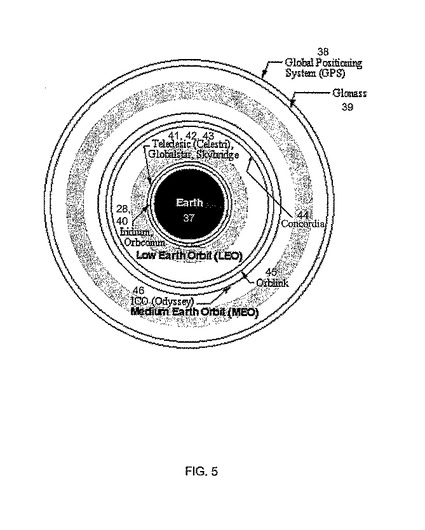
【図6】
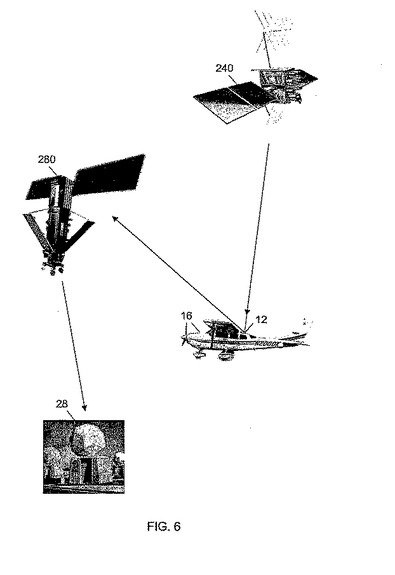
【図7】
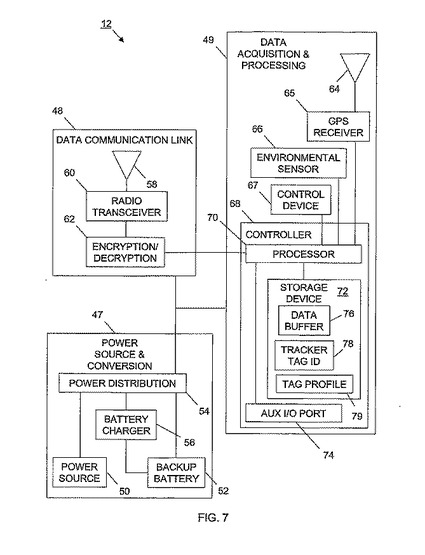
【図8】
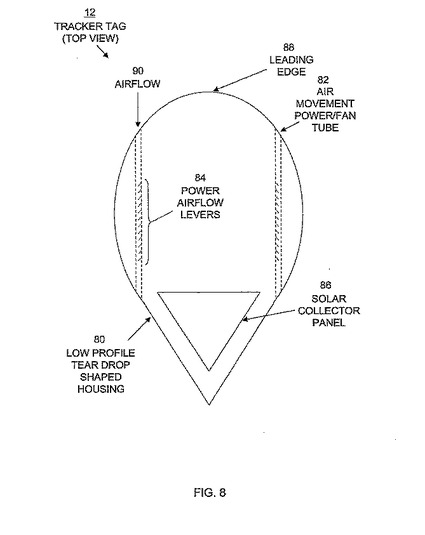
【図9】
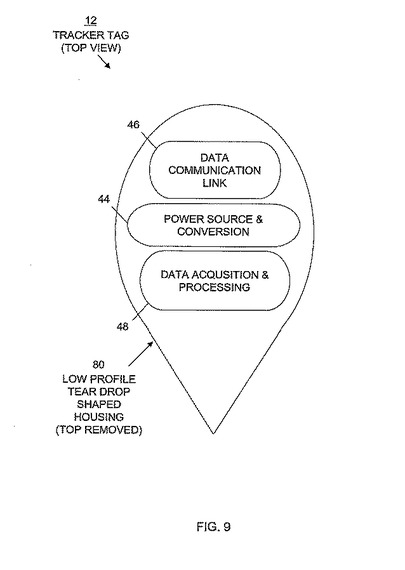
【図10】
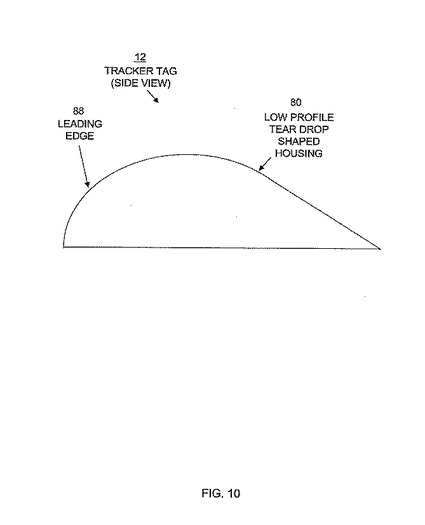
【図11】
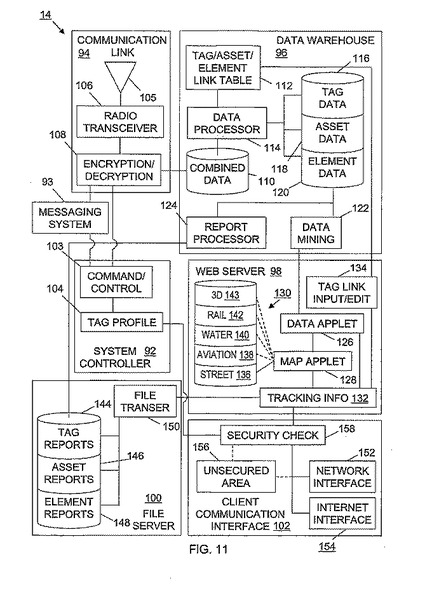
【図12】
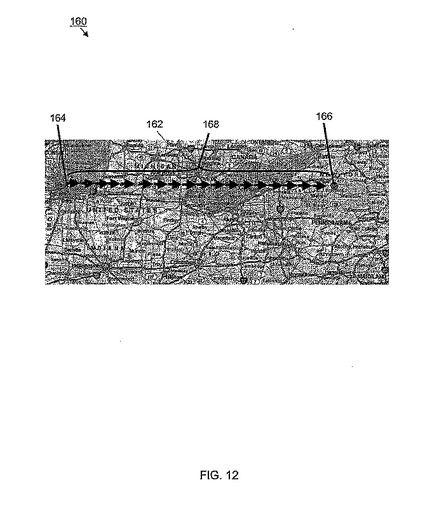
【図13】
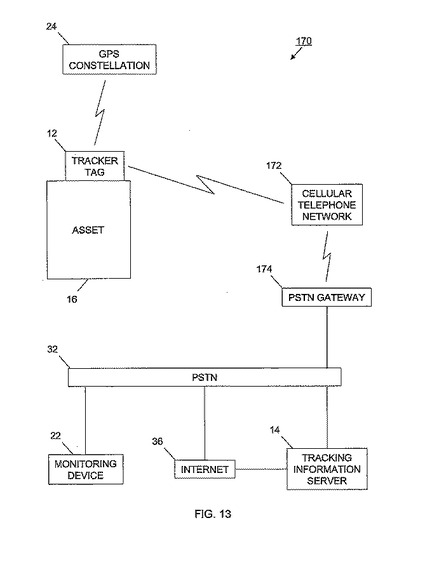
【図14】
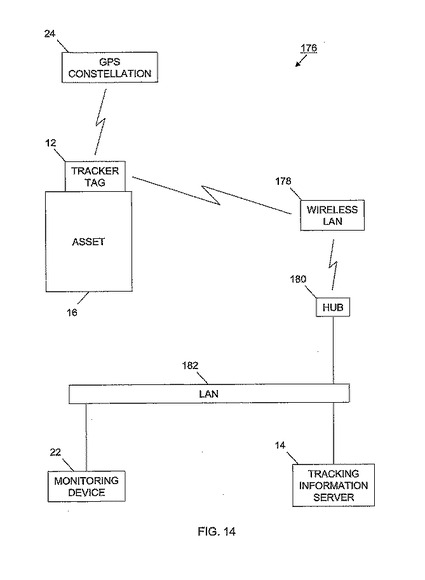
【図15】
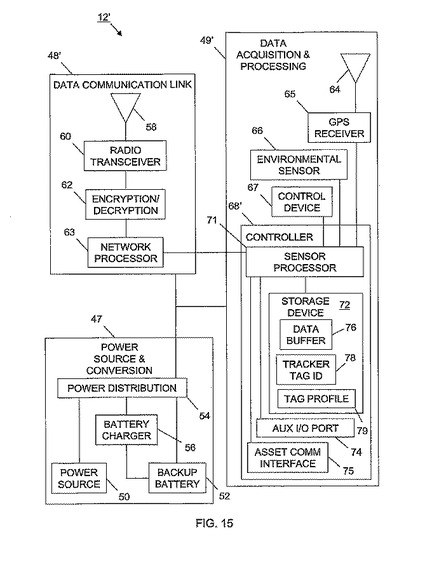
【図16】
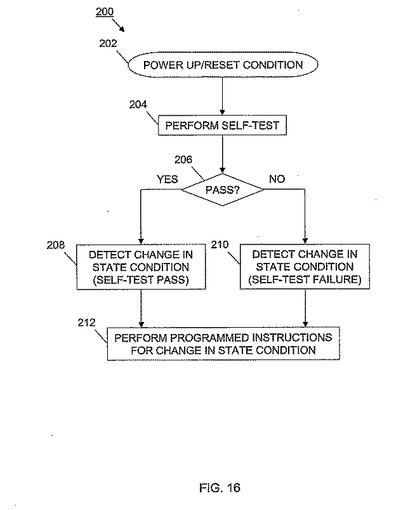
【図17】
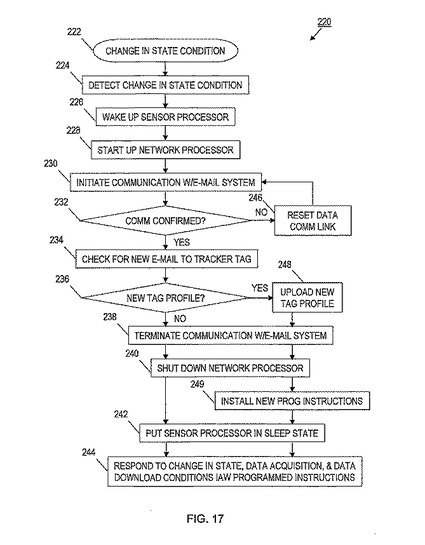
【図18】
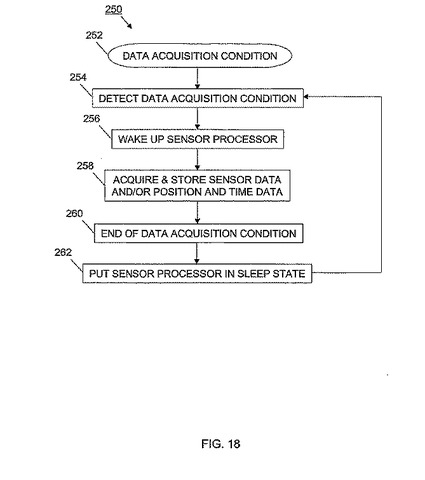
【図19】
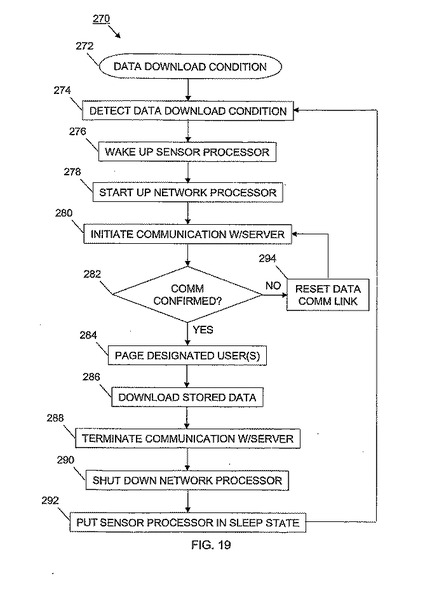
【図20】
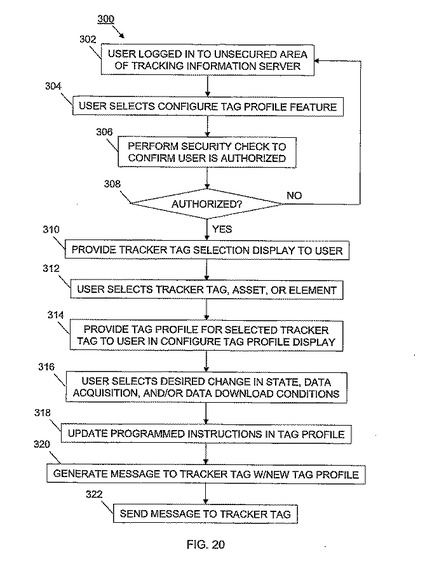
【図21】
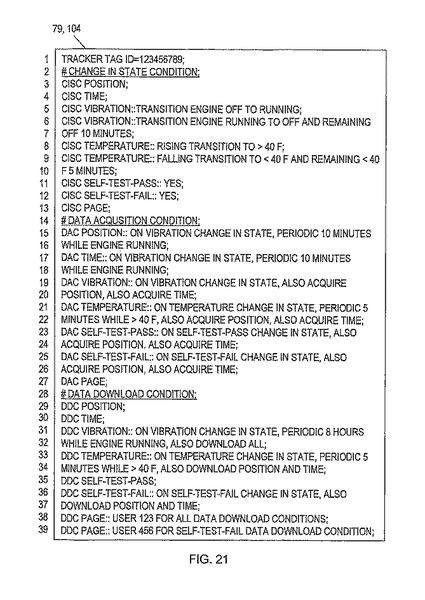
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公表番号】特表2007−521548(P2007−521548A)
【公表日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願番号】特願2006−514299(P2006−514299)
【出願日】平成16年5月6日(2004.5.6)
【国際出願番号】PCT/US2004/014025
【国際公開番号】WO2005/022292
【国際公開日】平成17年3月10日(2005.3.10)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
2.Bluetooth
【出願人】(503366221)アーゴ−テック・コーポレーション (5)
【Fターム(参考)】
【公表日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願日】平成16年5月6日(2004.5.6)
【国際出願番号】PCT/US2004/014025
【国際公開番号】WO2005/022292
【国際公開日】平成17年3月10日(2005.3.10)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
2.Bluetooth
【出願人】(503366221)アーゴ−テック・コーポレーション (5)
【Fターム(参考)】
[ Back to top ]