
送信位置検出装置,方法および送信位置検出システム並びにプログラム
【課題】 迅速にRFIDタグ,RFID読取装置等の無線送信源の位置を検出する。
【解決手段】 一実施形態における送信位置検出装置は、無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、各受信アンテナが無線送信源から無線送信された信号を受信したときの各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて無線送信源の位置を示す三次元座標を演算する計測部とを備える。
【解決手段】 一実施形態における送信位置検出装置は、無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、各受信アンテナが無線送信源から無線送信された信号を受信したときの各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて無線送信源の位置を示す三次元座標を演算する計測部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、無線送信源の位置を検出する装置,方法および送信位置検出システム並びにプログラムに関する。
【背景技術】
【0002】
RFID(Radio Frequency Identification)タグ(無線タグや応答器等とも称される)は、アンテナと無線通信部と記憶部を備えており、それぞれのRFIDタグにおける記憶部には各タグで重複しない識別情報が記憶されている。RFID読取装置(リーダライタや質問器とも称される)がRFIDタグに問合わせ信号を送信すると、RFIDタグは当該問合わせ信号に応じた処理を行う。例えば、RFIDタグが記憶している識別情報と、RFID読取装置からの問合わせ信号に含まれる識別情報とが一致した場合にだけ応答を返すRFIDタグが知られている。
【0003】
このような機能を有するRFIDタグは、例えば物品に取り付けることで、物流業の物品管理を始めとする様々な分野で使用されている。近年では、各種商品を販売する店舗において、各RFIDタグを商品に取り付けることにより、商品の販売や在庫管理を行うシステムも実用化されている。
【0004】
ところで、大量の物品を扱う業種においては、物品の種類や個数の管理だけでなく、各物品がどの位置に所在するのかを容易に認識できるようにしたいとの要望がある。RFIDタグの位置を検出するには、RFID読取装置がRFIDタグと通信を行うときのアンテナの指向性と受信信号の位相とから、RFIDタグの二次元の位置を検出する方法を採用し得る。
【0005】
しかしながら、上記の方法はRFIDタグの位置を二次元座標で求めるものである。このため、例えば棚に陳列された物品に付されるRFIDタグの位置検出に上記方法を採用した場合、どの棚に所望の物品が陳列されているかは知ることはできるが、棚の何段目に陳列されているかまでは知ることができない。また、アンテナの遠方界では指向性が絞れるが、近傍界では指向性が乏しくなる傾向がある。したがって、RFID読取装置からRFIDタグまでの距離が短いと、座標の検出精度が低下する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第7,873,326号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、RFIDタグ,RFID読取装置等の無線送信源の位置を三次元座標で求めることができ、しかもRFID読取装置とRFIDタグとのように無線送信源どうしの距離が短くても座標の検出精度が低下することのない送信位置検出システム及びこのシステムで用いる送信位置検出装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
一実施形態における送信位置検出装置は、無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、各受信アンテナが無線送信源から無線送信された信号を受信したときの各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて無線送信源の位置を示す三次元座標を演算する計測部とを備える。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態における送信位置検出システムの概略斜視図。
【図2】同実施形態における送信位置検出装置の概略ブロック図。
【図3】同実施形態における計測部の概略ブロック図。
【図4】同実施形態におけるTDCの動作を説明するための信号波形図。
【図5】同実施形態における無線送信源の座標演算を説明するための図。
【図6】同実施形態におけるRFID読取装置とRFIDタグとの通信を説明するための図。
【図7】同実施形態におけるRFID読取装置が送信するQuery(Q)の包絡線波形の一部を示す図。
【図8】同実施形態におけるRFIDタグが送信するプリアンブル(P)の波形を示す図。
【図9】同実施形態における送信位置検出装置の動作手順を示す流れ図。
【図10】同実施形態におけるサーバの動作手順を示す流れ図。
【図11】同実施形態におけるRFID読取装置の動作手順を示す流れ図。
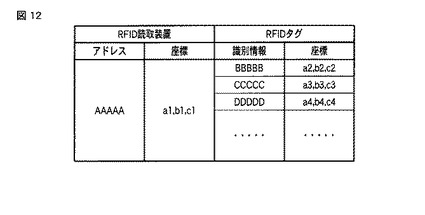
【図12】同実施形態においてサーバに備えられているデータベースの模式図。
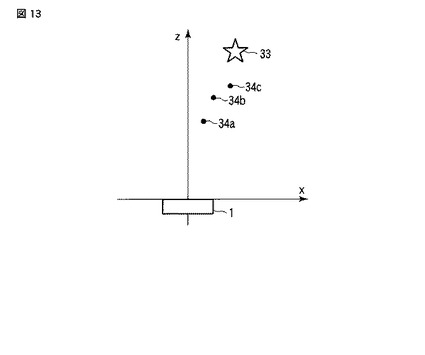
【図13】同実施形態において無線送信源の送信位置検出結果をx−z面の表示例として示す図。
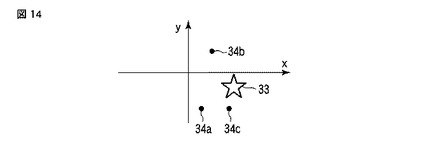
【図14】同実施形態において無線送信源の送信位置検出結果をx−y面の表示例として示す図。
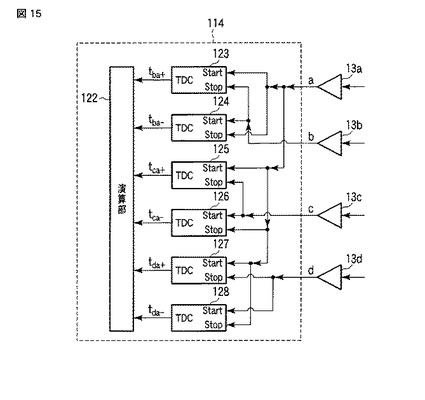
【図15】第2の実施形態における計測部の概略ブロック図。
【図16】同実施形態における各TDCへの入力信号波形図。
【図17】同実施形態における各TDCからの出力信号波形図。
【発明を実施するための形態】
【0010】
以下、各実施形態について、図面を参照しながら説明する。
(第1の実施の形態)
[要部構成]
先ず、本実施形態における送信位置検出システムの要部構成について説明する。
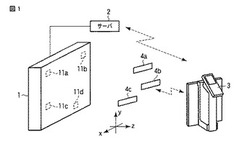
図1は、送信位置検出システムの概略斜視図であり、図2は、送信位置検出システムの概略ブロック図である。送信位置検出システムは、無線送信源であるRFID読取装置3と複数のRFIDタグ4(4a,4b,4c,…)のそれぞれの位置を三次元座標(x,y,z)で求めるもので、送信位置検出装置1とサーバ2とを含む。
【0011】
送信位置検出装置1は、サーバ2と有線で通信する。サーバ2は、RFID読取装置3と無線で通信する。サーバ2とRFID読取装置3との間の無線通信は、無線LANまたはBluetooth(登録商標)のように、送信局のアドレス(MACアドレスまたはBluetoothアドレス)を含むパケットを使用する。
【0012】
RFID読取装置3は、各RFIDタグ4(4a,4b,4c・・・)と無線で通信する。RFID読取装置3と各RFIDタグ4との間の無線通信は、一般的なRFID技術の通信プロトコルに従う。本実施形態では、近年広く普及しつつあるEPC globalのClass1 Generation2規格(以下、C1G2規格と称する)に従って通信する。
【0013】
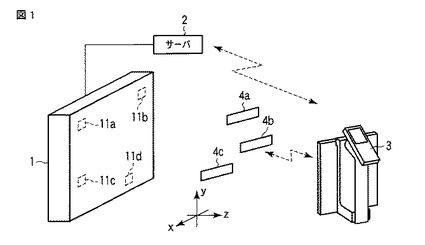
送信位置検出装置1は、例えば図1に示すように、直方体形状の筐体を有している。そして、この筐体の内部に、それぞれ4つの受信アンテナ11(11a,11b,11c,11d)を配置している。さらに送信位置検出装置1は、図2に示すように、各受信アンテナ11にそれぞれ対応して4つの復調部12(12a,12b,12c,12d)と増幅部13(13a,13b,13c,13d)を備えるとともに、計測部14、制御部15及び発振部16を備えている。
【0014】
各受信アンテナ11a〜11dの配置には制限がある。例えば、4つの受信アンテナ11a〜11dを同一平面であるx−y面上に配置し、各受信アンテナ11a〜11dが長方形の頂点を取る形状であるとする。この場合、長方形の対角線の交点を通りかつこの長方形の面に垂直なz軸方向の線上では、どの点からも各受信アンテナ11a〜11dは等距離となる。このため、各受信アンテナ11a〜11dの相互間で到達時間に差が生じないので、z軸方向の距離を求めることができない。
【0015】
このような不具合を回避するために、各受信アンテナ11a〜11dを同一平面上に配置する場合には、以下の条件で配置する。すなわち、各受信アンテナ11a〜11dを頂点とする四角形としたときに、向かい合った角の和が180度にならないで、かつ、2つの対角線の中央が同じ点とならないように配置する。なお、各受信アンテナ11a〜11dを同一平面上に配置しなくてもよい。各受信アンテナ11a〜11dを同一平面上に配置しない場合には、各受信アンテナ11a〜11dが正四面体の頂点とならないように配置する。
【0016】
各受信アンテナ11a〜11dは、位置検出の精度の観点からは、点であることが理想である。しかし、現実的には受信電波の波長に依存する大きさが必要である。ただし、利得の高い指向性アンテナを使用する必要は無い。むしろ、誘電率の高い材質も用いて波長短縮し、小型化したアンテナを使用することが好ましい。
【0017】
RFID読取装置3とRFIDタグ4から放射された電波は、空間を通過して各受信アンテナ11a〜11dに到達する。各受信アンテナ11a〜11dは、前記の条件で配置されているので、電波を放射する無線送信源(RFID読取装置3またはRFIDタグ4)の位置から各受信アンテナ11a〜11dまでの距離は、アンテナ毎に異なる。このため、各受信アンテナ11a〜12dに電波が到達するまでの時間も、アンテナ毎に異なる。自由空間中を伝播する電波の速度は、約3×108m/sである。したがって、例えば、無線送信源から受信アンテナ11aまでの距離と、無線送信源から受信アンテナ11bまでの距離との差が1mのときには、約3.3ns(3300ps)の到達時間差が生じ、同距離の差が10cmのときには、約0.33ns(330ps)の到達時間差が生じる。
【0018】
各受信アンテナ11a〜11dは、それぞれ受信した電波を高周波信号に変換し、この高周波信号を対応する復調部12a〜12dに出力する。復調部12aは、受信アンテナ11aから出力される高周波信号と発振部16の出力を合成してベースバンド信号に変換し、このベースバンド信号を増幅部13aに出力する。他の復調部12b〜12dも同様に、それぞれ受信アンテナ11b〜11dから出力される高周波信号と発振部16の出力を合成してベースバンド信号に変換し、このベースバンド信号をそれぞれ増幅部13b〜13dに出力する。各復調部12a〜12dから出力されるベースバンド信号には、一般的にはRSSI(Received Signal Strength Indication)と呼ばれる受信信号強度を測定するための振幅情報を含んでいる。
【0019】
増幅部13aは、復調部12aから出力される信号を増幅して飽和させ、“H(High)”または“L(Low)”で表わされる2値情報として出力する。他の増幅部13b〜13dも同様に、それぞれ復調部12b〜12dから出力されるベースバンド信号を増幅し、2値情報として出力する。なお、各増幅部13a〜13dに代えてコンパレータを用いてもよい。
【0020】
増幅部13aから出力される2値情報の信号は、計測部14と制御部15に入力される。他の増幅部13b〜13dから出力される2値情報の信号は、計測部14にのみ入力され、制御部15には入力されない。制御部15は、増幅部13aから出力された信号を復号し、復号したデータに応じた処理を行う。具体的には、RFID読取装置3が送信する信号の振幅は大きく、RFIDタグ4が送信するバックスキャッタ信号の振幅は小さい。このため、RFID読取装置3の信号を受信するときの利得は小さく、RFIDタグ4の信号を受信するときの利得は大きくなるように、制御部15は、各増幅部13a〜13dの利得を制御する。なお、増幅部13aの出力のみ制御部15へ入力するとしたが、増幅部13b,13cまたは13dから出力された信号を制御部15に入力する構成としてもよい。
【0021】
このように、無線送信源であるRFID読取装置3及びRFIDタグ4から送信された信号は、各増幅部13a〜13dの出力段階で2値情報となる。この2値情報の出力が“L”から“H”に変化するタイミングは、RFID読取装置3またはRFIDタグ4からの電波が各受信アンテナ11a〜11dに到達した時間によって決まる。
【0022】
計測部14は、各増幅部13a〜13dから入力される信号の時間差を検出する。そして計測部14は、それぞれの時間差と受信アンテナ11a〜11dの座標データとに基づいて、受信した信号を送信した無線送信源の位置を三次元座標として算出する。ここで算出される三次元座標は、送信位置検出装置1を基準とした座標である。計測部14は、算出した三次元座標値を制御部15へ出力する。
【0023】
制御部15は、図示しないCPU(Central Processing Unit)と記憶部を備えている。制御部15は、記憶部に記憶されたプログラムに従って動作し、増幅部13(13a,13b,13c,14d)、計測部14及び発振部16を制御する。また制御部15は、増幅部13aから出力された信号と計測部14から出力された三次元座標値とを関連付けし、サーバ2へ送信する。さらに制御部15は、サーバ2からRFID読取装置3が使用する周波数情報を受信する。
【0024】
発振部16は、高周波信号を発生し、この高周波信号を各復調部12a〜12dに出力する。発振部16の発振周波数は、RFID読取装置3が送信する電波を復調するために必要とする周波数である。例えば、復調部12がダイレクトコンバージョン方式を採用している場合には、発振周波数は、RFID読取装置3が送信する搬送波と同じ周波数となる。これに対し、復調部12が中間周波数を使用する方式を採用している場合には、発振周波数は、RFID読取装置3が送信する搬送波周波数から中間周波数を引き算した値の周波数となる。このような発振周波数は、制御部15からの信号に応じて変更することができる。
【0025】
[時間計測]
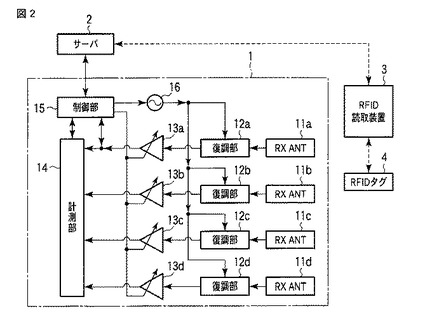
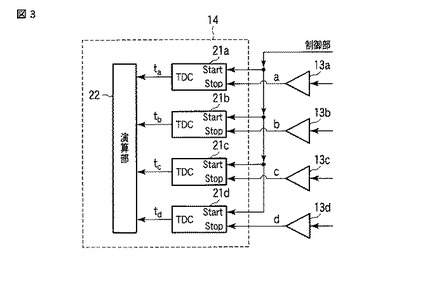
図3に計測部14の概略ブロック図を示す。計測部14は、4つのTDC(Time to Digital Converter)21(21a,21b,21c,21d)と、演算部22とを備えている。
【0026】
各TDC21a〜21dは、Start入力用の端子と、Stop入力用の端子と、出力端子とを有している。各TDC21a〜21dは、Start入力が“L”から“H”に変化した後に、Stop入力が“L”から“H”に変化するまでの時間に応じたデジタル値を出力する。近年は、180nmプロセスのCMOS(Complementary Metal Oxide Semiconductor)技術を使用して、10ps程度の測定分解能が得られている。製造プロセスが微細化すれば、さらに短い時間を測定する分解能を得ることができる。
【0027】
各TDC21a〜21dのStart入力用の端子は、制御部15に接続されている。TDC21aのStop入力用の端子は、増幅部13aに接続されている。他のTDC21b〜21dのStop入力用の端子も同様に、それぞれ対応する増幅部13b〜13dに接続されている。各TDC21a〜21dの出力端子は、演算部22に接続されている。
【0028】
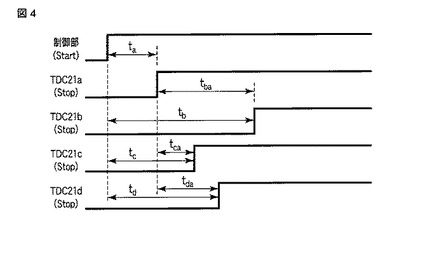
各TDC21a〜21dの動作を、図4に示す信号波形を参照して説明する。
先ず、各TDC21a〜21dへのStart入力およびStop入力は、全て“L”になっている。制御部15からのStart入力が“H”になると、各TDC21a〜21dは、それぞれ時間測定を開始する。TDC21aへのStop入力が“H”になると、TDC21aは、計測時間としてtaを出力する。次に、TDC21cへのStop入力が“H”になると、TDC21cは、計測時間としてtcを出力する。TDC21dへのStop入力が“H”になると、TDC21dは、計測時間としてtdを出力する。TDC21bへのStop入力が“H”になると、TDC23bは、計測時間としてtbを出力する。
【0029】
このように、制御部15は、各TDC21a〜21dへのStart入力を“H”にすることで、計測部14に時間計測を開始させる。各TDC21a〜23dへのStart入力を“H”にするタイミングは、受信アンテナ11aから制御部15に入力される信号に応じて決定される。その決定方法については後述する。
【0030】
演算部22は、図示しない記憶部を備えている。演算部22は、この記憶部に記憶されたプログラムに従って動作し、入力された各計測時間ta,tb,tc,tdから、各信号の到達時間差を算出する。受信アンテナ11aと受信アンテナ11bの到達時間差tbaは、tb−taから求まり、受信アンテナ11aと受信アンテナ11cの到達時間差tcaは、tc−taから求まり、受信アンテナ11aと受信アンテナ11dの到達時間差tdaは、td−taから求まる。
【0031】
こうして、各到達時間差tba,tca,tdaを求めた後、演算部22は、受信アンテナ11a〜11dの座標を用いて、無線送信源(RFID読取装置3またはRFIDタグ4)の座標を算出する。ここで算出する座標は、送信位置検出装置1を基準とする座標である。
【0032】
[座標演算]
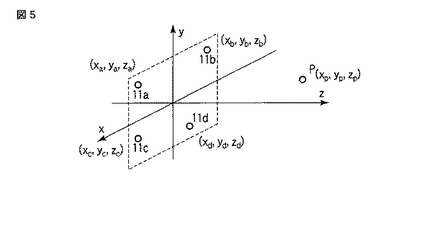
図5を用いて無線送信源の座標演算について説明する。
【0033】
受信アンテナ11aの座標は(xa,ya,za)、受信アンテナ11bの座標は(xb,yb,zb)、受信アンテナ11cの座標は(xc,yc,zc)、受信アンテナ11dの座標は(xd,yd,zd)で既知であり、演算部22が有する記憶部等に予め記憶されている。
【0034】
1つの無線送信源の座標をP点(xP,yP,zP)とし、電波の伝達速度をCとする。そうすると、各受信アンテナ11a〜11dの座標(xa,ya,za),(xb,yb,zb),(xc,yc,zc),(xd,yd,zd)と到達時間差tba,tca,tdaとを用いて、下記の数式[数1],[数2],[数3]が成立する。
【数1】

【0035】
【数2】
【0036】
【数3】
【0037】
数式[数1],[数2],[数3]において、xP,yP,zP以外は既知の値である。このため、これら3つの連立方程式を解くことにより、無線送信源の座標であるP点(xP,yP,zP)の値を求めることができる。この非線形連立方程式は、ニュートン法等の数値計算方法を使用することによって解を求めることができる。
【0038】
ただし、各受信アンテナ11a〜11dが同一平面に配置されている場合は、解が2つ存在する。そこで、本システムは、送信位置検出装置1を壁等に設置する。そうすることにより、送信位置検出装置1の背面側(z軸の負の方向)には無線送信源が存在しないため、zPの値が正となる解を無線送信源の座標とすることができる。各受信アンテナ11a〜11dを同一平面に配置しない場合は、解は1つになるため、送信位置検出装置1をどのように設置してもよい。
【0039】
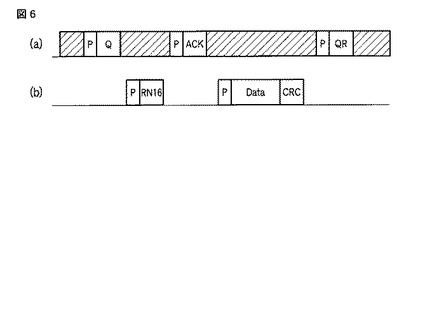
ここで、RFID読取装置3とRFIDタグ4との通信について、図6を用いて説明する。図6の(a)は、RFID読取装置3の送信データであり、斜線を付した部分は搬送波のみが送信されている状態を示している。図6の(b)は、RFIDタグ4の送信データである。
【0040】
C1G2規格の通信においては、先ずRFID読取装置3が搬送波を送信する。RFIDタグ4は、この搬送波を受信することによって起動する。次に、RFID読取装置3は、プリアンブル(P)を送信し、続いて、読取り開始を知らせるQuery(Q)を送信する。
【0041】
RFIDタグ4は、プリアンブル(P)を受信すると、このプリアンブル(P)に続くデータを受信できるように同期を取るために、受信速度を決定する。そして、Query(Q)を受信すると、RFIDタグ4は、そのQuery(Q)の内容に従った設定を行う。その後、RFIDタグ4は、ランダムに選択したスロットで応答を送信する。本実施形態では、説明の都合上、RFIDタグ4が直ちに応答するものとして説明を続ける。
【0042】
RFIDタグ4は、Query(Q)を受信した後、プリアンブル(P)を送信し、続いて、16ビットの擬似乱数(RN16)を送信する。擬似乱数は、暗号文字列として使用されるために、以後の通信の間保持される。RFID読取装置3は、プリアンブル(P)と擬似乱数(RN16)を受信すると、フレーム同期を取るためのFrame−Sync(F)を送信し、続いて、正しく受信できたことを知らせる応答信号(ACK)を送信する。
【0043】
RFIDタグ4は、応答信号(ACK)を受信すると、プリアンブル(P)とデータ(Data)とデータ誤り検出符号(CRC:Cyclic Redundancy Check)を送信する。このときのデータ(Data)の中に、RFIDタグ4毎に固有の識別情報、すなわちC1G2規格のEPC(Electronic Product Code)が含まれている。
【0044】
RFID読取装置3は、プリアンブル(P)、データ(Data)及びデータ誤り検出符号(CRC)を受信すると、データ誤り検出符号(CRC)を用いて伝送エラーの有無を検出する。その結果、正しく受信したと判断すると、RFID読取装置3は、Frame−sync(F)を送信し、続いて、QueryRep(QR)を送信する。これに対し、正常に受信できなかったと判断した場合には、RFID読取装置3は、QueryRep(QR)に代えて、正常に受信できなかったことを通知する応答信号(NAK)を送信し、RFIDタグ4に再送を要求する。RFID読取装置3の交信領域内にあるRFIDタグ4が1つだけのときは、ここまでの処理で通信が完了する。
【0045】
RFID読取装置3の交信領域内にRFIDタグ4が複数ある場合には、QueryRep(QR)の後に、別のRFIDタグ4がプリアンブル(P)と擬似乱数(RN16)とを送信する。RFID読取装置3は、擬似乱数(RN16)を受信すると、Frame−Sync(F)と正常応答信号(ACK)とを送信し、これを受信したRFIDタグ4がプリアンブル(P)、データ(Data)およびデータ誤り検出符号(CRC)を送信する。RFID読取装置3は、データ(Data)を正常に受信すると、Frame−Sync(F)を送信する。このような処理を繰り返すことによって、RFID読取装置3は、交信領域内にある複数のRFIDタグ4の識別情報を取得する。
【0046】
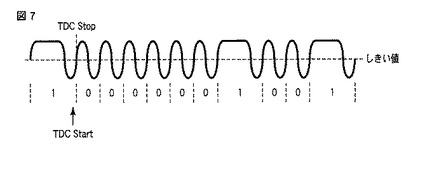
図7にRFID読取装置3が送信するQuery(Q)の包絡線波形の一部を示す。C1G2規格では、符号化方式として、“0”を表す時間を短く、“1”を表す時間を長くするPIE(Pulse-interval encoding)がQuery(Q)として使用される。PIEは、“0”と“1”を表す時間長は異なるが、振幅を小さくする時間長は同じである。すなわちPIEは、振幅が小さくなっている時間が一定である。このため、Query(Q)を受信し、その振幅が小さくなると、振幅が大きくなるタイミングを誰もが予想できる。
【0047】
制御部15は、PIEの振幅が小さくなったときを検出すると、振幅が大きくなる前に各TDC21a〜21dのStart入力を一斉に“H”にする。これにより、各TDC21a〜21dは、時間計測を開始する。各増幅部13a〜13dは、対応する復調部12a〜12dから入力される信号の振幅が図7に示すしきい値より大きいときは“H”を出力し、小さいときは“L”を出力する。したがって、制御部15がStart入力を一斉に“H”にしてから、対応する増幅部13a〜13dの出力が最初に“H”になるまでの間、各TDC21a〜21dは、時間ta,tb,tc,tdを測定する。
【0048】
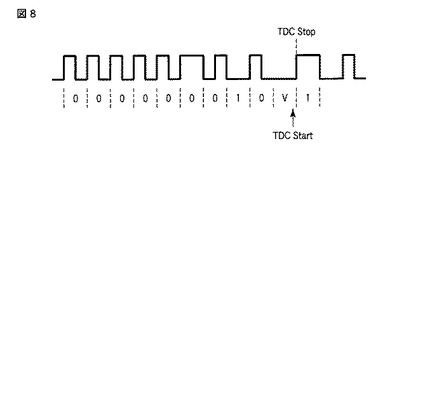
図8にRFIDタグ4が送信するプリアンブル(P)の波形を示す。なお、図8は、C1G2規格でFM0符合を使用するときのプリアンブル(P)である。FM0符合においては、“0”を表わすときは1ビットの中心でレベルを“H”から“L”または“L”から“H”に反転させ、“1”を表わすときは1ビットの中でレベルを一定に保ち、変化させない、また、あるビットから次のビットに切り替わるときにレベルを反転させる。“V”は、FM0符合のルールに従わないビットであり、プリアンブル(P)の中だけに表れる。
【0049】
通常、プリアンブル(P)の先頭においては、ビット同期をとるために、同じパターンが繰り返される。その後、別の決められたパターンを使用して、プリアンブル(P)の後に続く情報との境目がわかるようにしている。図8では、“0”が5つ連続で現れている箇所がビット同期に使用され、その後の“1010V1”より後がデータとなる。
【0050】
送信位置検出装置1は、このような手順で行われる通信を受信する。制御部15は、正常応答信号(ACK)を受信した後のプリアンブル(P)を受信すると、ビット同期を取る。こうして、ビット同期をとった後は、制御部15は、受信信号のレベルが変化するタイミングを予想できる。
【0051】
そこで制御部15は、ビット同期をとって“V”を検出した直後、受信信号レベルが“L”から“H”に最初に変化する前に各TDC21a〜21dのStart入力を一斉に“H”にする。これにより、各TDC21a〜21dは、時間計測を開始する。一方、各増幅部13a〜13dは、それぞれ受信信号レベルが“L”から“H”に変化すると、“H”を出力する。したがって、制御部15がStart入力を一斉に“H”にしてから、対応する増幅部13a〜13dの出力が最初に“H”になるまでの間、各TDC21a〜21dは、時間ta,tb,tc,tdを測定する。
【0052】
なお、図2のブロック図では、増幅部13aの出力を制御部15に入力して、受信データを取得している。無線送信源から受信アンテナ11aまでの距離が最短ではなく、無線送信源から他の受信アンテナ11b〜11dまでの距離が短いことがある。各受信アンテナ11a〜11dが図5のように配置されているとき、受信アンテナ11aから最も遠くにある受信アンテナが受信アンテナ11dであるとすると、受信アンテナ11aと受信アンテナ11dの最大到達時間差tmは、下記の数式[数4]で表わすことができる。
【数4】
【0053】
受信アンテナ11aに対して最も遠くにある受信アンテナが他のアンテナである場合でも、同様の計算式にて受信アンテナ11aと最も遠くにあるアンテナとの最大到達時間差tmを求めることができる。
【0054】
これらを考慮すると、受信信号のレベルが“L”から“H”に変化すると予想される時点から最大到達時間差tmより前の時間に、各TDC21a〜21dへのStart入力を“H”にすればよい。言い換えると、時間測定を開始するタイミングは、受信アンテナ間の最大距離を電波が伝達する時間より後に各受信アンテナ11a〜11dの受信信号レベルが変化するように設定すればよい。
【0055】
また、測定時間が長すぎると、次の受信信号レベルの変化点が現れてしまうので、次の変化点が現れる前に測定を終了することが好ましい。伝送速度と符号化方式により、信号レベルの変化点が現れる時間間隔が決まるので、これから測定終了時間を決めればよい。
【0056】
以上のように時間測定の開始と終了のタイミングを決定することによって、送信位置検出装置1は、各受信アンテナ11a〜11dと無線送信源(RFID読取装置3及びRFIDタグ4)との配置に関係なく、全ての受信アンテナ11a〜11dに到達する信号のレベル変化タイミングを捉えることができる。そして送信位置検出装置1は、測定した時間差から無線送信源の位置を特定することができる。
【0057】
しかも、送信位置検出装置1は、識別情報を含むデータのプリアンブル(P)を利用してRFIDタグ4の位置を検出するので、RFIDタグ4の識別情報と位置を一度に検出することができる。したがって、複数のRFIDタグ4の識別情報を検出した場合、送信位置検出装置1は、それぞれの識別情報に対応する位置も検出することができる。
【0058】
なお、本実施形態では、プリアンブル(P)の“V”の位置で各TDC21a〜21dのStart入力を“H”にするが、ビット同期が取れた後であれば、任意の受信信号レベルの変化点付近で同様に時間を測定することができる。
【0059】
[システムの動作]
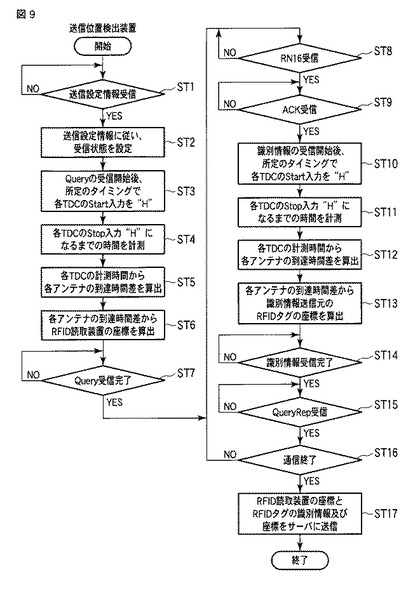
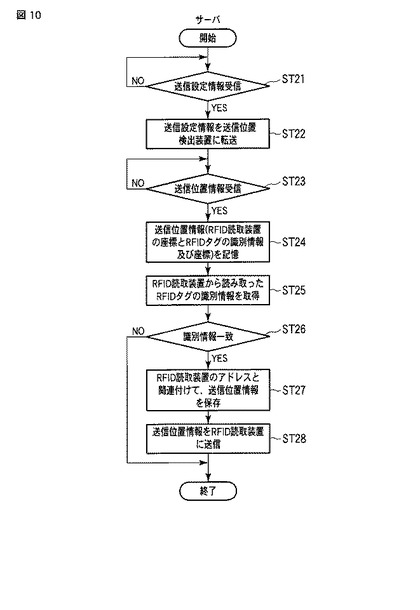
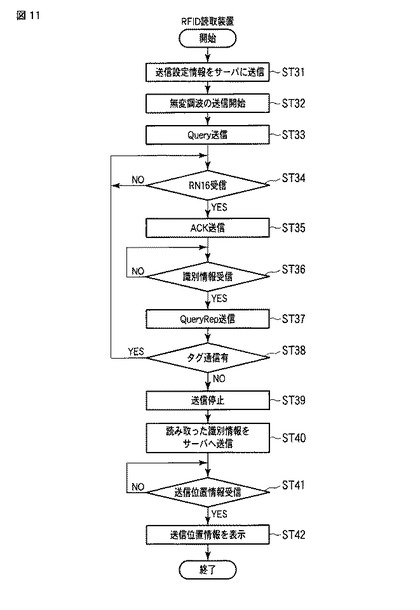
次に、送信位置検出システムの動作を図9〜図11を用いて説明する。図9は、送信位置検出装置1の動作手順を示す流れ図であり、図10は、サーバ2の動作手順を示す流れ図である。また、図11は、RFID読取装置3の動作手順を示す流れ図である。
【0060】
本システムでは、先ず、RFID読取装置3が、RFIDタグ4の読取を開始する前に、送信設定情報をサーバ2に送信する(図11のST31)。送信設定情報は、RFIDタグ4の読取を行うための周波数、伝送速度、および符号化方式を含む。
【0061】
サーバ2は、RFID読取装置3の送信設定情報を待機する(図10のST21)、そして、RFID読取装置3から送信設定情報を受信すると(ST21のYES)、サーバ2は、その受信した送信設定情報を送信位置検出装置1に転送する(図10のST22)。
【0062】
送信位置検出装置1は、RFID読取装置3の送信設定情報を待機する(図9のST1)。そして、サーバ2から同送信設定情報を受信すると(ST1のYES)、送信位置検出装置1は、その情報を基に各部の受信状態を設定する(図9のST2)。例えば送信位置検出装置1は、RFIDタグ4の読取に使用される周波数を受信できるように、発振部16を設定する。また、制御部15に対しては、受信に用いる伝送速度と符号化方式を設定する。
【0063】
続いて、RFID読取装置3は、RFIDタグ4を起動させるために、無変調波の送信を開始する(図11のST32)。そしてRFID読取装置3は、無変調波を所定時間送信した後でQuery(Q)を送信する(図11のST33)。RFID読取装置3から送信される信号は、RFIDタグ4で受信されるだけでなく、送信位置検出装置1でも受信される。
【0064】
Query(Q)の受信を開始した送信位置検出装置1は、前述したタイミングで、制御部15が各TDC21a〜21dのStart入力を“H”にする(図9のST3)。これにより、各TDC21a〜21dは、Start入力が“H”になってからStop入力が“H”になるまでの時間ta,tb,tc,tdを計測し、計測時間ta,tb,tc,tdを演算部22へ出力する(図9のST4)。演算部22は、入力された計測時間ta,tb,tc,tdに基づいて受信アンテナ11a〜11d毎の到達時間差tba,tca,tdaを算出する(図9のST5)。さらに演算部22は、算出した到達時間差tba,tca,tdaからRFID読取装置3の座標を算出する(図9のST6)。送信位置検出装置1は、Query(Q)の受信を完了するまでに(図9のST7)、上述したステップST3,4,5,6の処理を実行する。
【0065】
RFIDタグ4は、Query(Q)を受信すると、16ビットの擬似乱数(RN16)を送信する。RFIDタグ4から送信される擬似乱数(RN16)の信号は、RFID読取装置3で受信されるだけでなく、送信位置検出装置1でも受信される。
【0066】
Query(Q)を送信したRFID読取装置3は、擬似乱数(RN16)の受信を待機する(図11のST34)。RFIDタグ4から擬似乱数(RN16)を受信すると(ST34のYES)、RFID読取装置3は、応答信号(ACK)を送信する(図11のST35)。RFIDタグ4は、応答信号(ACK)を受信すると、固有の識別情報を送信する。識別情報は、プリアンブル(P)に続くデータ(Data)に含まれる。
【0067】
そこで、Query(Q)の受信を完了した送信位置検出装置1は、先ず、擬似乱数(RN16)の受信を待機する(図11のST8)。そして、RFIDタグ4から擬似乱数(RN16)を受信すると(ST8のYES)、続いて送信位置検出装置1は、応答信号(ACK)を待機する(図11のST9)。そして、RFID読取装置3から応答信号(ACK)を受信すると(ST9のYES)、送信位置検出装置1は、識別情報の受信を開始する。送信位置検出装置1は、プリアンブル(P)に含まれる“1010V”を受信中の前述したタイミングで、制御部15が各TDC21a〜21dのStart入力を“H”にする(図9のST10)。これにより、各TDC21a〜21dは、Start入力が“H”になってからStop入力が“H”になるまでの時間ta,tb,tc,tdを計測し、計測時間ta,tb,tc,tdを演算部22へ出力する(図9のST11)。演算部22は、入力された計測時間ta,tb,tc,tdに基づいて受信アンテナ11a〜11d毎の到達時間差tba,tca,tdaを算出する(図9のST12)。さらに演算部22は、算出した到達時間差tba,tca,tdaから識別情報を送信したRFIDタグ4の座標を算出する(図9のST13)。
【0068】
一方、応答信号(ACK)を送信したRFID読取装置3は、RFIDタグ4の識別情報を待機する(図11のST36)、RFIDタグ4から識別情報を受信すると(ST36のYES)、RFID読取装置3は、QueryRep(QR)を送信する(図11のST37)。識別情報を送信したRFIDタグ4は、QueryRep(QR)を受信すると、処理を終了する。
【0069】
RFID読取装置3は、QueryRep(QR)を送信した後、他のRFIDタグとの通信が有るか否かを判断する(図11のST38)、通信が有る場合(ST38のYES)、RFID読取装置3は、擬似乱数(RN16)の受信処理(図11のST34)に戻る。通信が無い場合(ST38のNO)、RFID読取装置3は、送信を停止する(図11のST39)。
【0070】
送信位置検出装置1は、識別情報を含むデータ(Data)の受信を完了するのを待機する(図9のST14)。識別情報の受信を完了したならば(ST14のYES)、送信位置検出装置1は、QueryRep(QR)の受信を待機する(図9のST15)。QueryRep(QR)を受信したならば(ST15のYES)、送信位置検出装置1は、RFID読取装置3が通信を停止したか否かを判断する(図9のST16)。
【0071】
RFID読取装置3から次の擬似乱数(RN16)を受信した場合、RFID読取装置3は通信を停止していない。この場合(ST16のNO)、送信位置検出装置1は、擬似乱数(RN16)の受信処理(図9のST8)に戻る。
【0072】
これに対し、RFID読取装置3からの受信がなく、通信が終了したと判断した場合には(ST16のYES)、送信位置検出装置1は、無線送信源の送信位置情報をサーバ2へ送信する(図9のST17)。以上で、送信位置検出装置1は、今回の処理を終了する。ここで、サーバ2に送信される無線送信源の送信位置情報には、今回の処理で送信位置検出装置1が取得したRFID読取装置3の座標と、RFIDタグ4の識別情報及び座標とが含まれる。
【0073】
一方、通信を停止したRFID読取装置3は、今回の処理でRFIDタグ4から読取った識別情報をサーバ2に送信する(図11のST40)。このとき、RFID読取装置3は、自己のアドレスをRFIDタグの識別情報とともに送信する。
【0074】
送信設定情報を送信位置検出装置1に送信したサーバ2は、無線送信源の送信位置情報を待機する(図10のST23)。そして、送信位置検出装置1から無線送信源の送信位置情報を受信すると(ST23のYES)、サーバ2は、その送信位置情報をメモリで一時的に記憶する(図10のST24)。また、サーバ2は、RFID読取装置3で読み取ったRFIDタグ4の識別情報を、当該RFID読取装置3のアドレスとともに取得する(図10のST25)。そして、サーバ2は、送信位置情報に含まれるRFIDタグの識別情報と、RFID読取装置3で読み取ったRFIDタグ4の識別情報とを照合して一致するか否かを判断する(図10のST26)。一致しない場合(ST26のNO)、サーバ2は、今回の処理を終了する。
【0075】
これに対し、送信位置情報に含まれるRFIDタグ4の識別情報と、RFID読取装置3で読み取ったRFIDタグ4の識別情報とが一致する場合には(ST26のYES)、サーバ2は、当該RFID読取装置3のアドレスと関連付けて、無線送信源の送信位置情報をデータベースに保存する(図10のST27)。また、サーバ2は、データベースに保存した無線送信源の送信位置情報を、この送信位置情報に関連付けられたアドレスで特定されるRFID読取装置3に送信する(図10のST28)。以上で、サーバ2は、今回の処理を終了する。
【0076】
ここで、サーバ2に備えられているデータベースの模式図を図12に示す。データベースは、RFID読取装置3のアドレス(AAAAA)に関連付けて、このRFID読取装置3の座標(a1,b1,c1)と、このRFID読取装置3で読取った各RFIDタグ4の識別情報及びその座標とを保存する。例えば、識別情報(BBBBB)のRFIDタグ4の座標は(a2,b2,c2)、識別情報(CCCCC)のRFIDタグ4の座標は(a3,b3,d3)、識別情報(DDDDD)のRFIDタグ4の座標は(a4,b4,d4)となる。
【0077】
なお、図示しないが、データベースでは、識別情報に関連付けられた物品情報も記憶しており、識別情報の座標からその識別情報のRFIDタグ4を付けている物品の座標を知ることができる。
【0078】
このように、サーバ2は、RFID読取装置3から受信したRFIDタグ4の識別情報と、送信位置検出装置1から受信したRFIDタグ4の識別情報とを照合して、同じであることを条件に、無線送信源(RFID読取装置3及びRFIDタグ4)の送信位置情報を、RFID読取装置3のアドレスと関連付けて記憶する。したがって、C1G2規格のようにRFID読取装置3とRFIDタグ4の通信においてRFID読取装置3を識別する情報が無く、複数のRFID読取装置3が存在する場合でも、RFID読取装置3とその座標を特定することができる。
【0079】
送信を停止したRFID読取装置3は、無線送信源の送信位置情報を待機する(図11のST41)。そして、サーバ2から無線送信源の送信位置情報を受信すると(ST41のYES)、RFID読取装置3は、表示部に無線送信源の送信位置検出結果を表示する(図11のST42)。以上で、今回の処理を終了する。
【0080】
図13及び図14は、無線送信源の送信位置検出結果を示す表示例である。図13及び図14において、星型33がRFID読取装置3の検出位置を表わし、黒丸34a,34b,34cがRFIDタグ4の検出位置を表わしている。図13は、x−z面の表示であり、図14は、x−y面の表示である。このように表示することにより、RFID読取装置3のオペレータに、無線送信源であるRFID読取装置3とRFIDタグ4の位置を知らせることができる。
【0081】
なお、黒丸34a,34b,34cに、識別情報を表示してもよいし、識別情報に関連付けされた物品情報を表示してもよい。また、この表示に棚や通路等を追加することによって、無線送信源の位置がさらに分かりやすくなる。また、RFID読取装置3が読取ったRFIDタグ4の方向に、RFID読取装置3が向いていると推定することも可能である。
【0082】
[座標演算の補正]
各受信アンテナ11a〜11dから計測部14までの間の回路で、回路遅延のばらつきや配線長のばらつき等が生じることがある。例えば、受信信号が受信アンテナ11aから入力されてTDC21aに入力される時間と、受信アンテナ11bから入力されてTDC21bに入力される時間には、若干の差が生じ得る。この若干の差を補正すると、演算した座標と実際の座標のずれを小さくすることができる。
【0083】
そこで、上記ずれを最小限にするため、到達時間差tba,tca,tdaの補正値を取得する機能を演算部22に設け、取得した補正値にて補正した後の到達時間差tba,tca,tdaを用いて送信点の座標を演算する。
【0084】
各受信アンテナ11a〜11dの間で生じる到達時間差のずれを補正する一例について説明する。
【0085】
補正値の取得は、例えば補正モードなるモードで送信位置検出装置1を起動した際に実行される。その際、予め受信アンテナ11aと受信アンテナ11bから等距離となる場所にRFID読取装置3を配置しておく。この状態で、前述した方法で座標の取得を行う。
【0086】
このとき、受信アンテナ11aと受信アンテナ11bへの電波の到達時間は同じであるため、回路における伝達遅延差がTDC21aとTDC21bの入力時間差Δtbaとして現れる。この時間差Δtbaは、補正値として例えば演算部22の記憶部に記憶される。回路における伝達遅延差が無い場合は、Δtba=0である。さらに、受信アンテナ11aと受信アンテナ11c、受信アンテナ11aと受信アンテナ11dとの間でも同様に補正値である時間差Δtca,Δtdaを取得する。
【0087】
補正値を取得した後、通常の動作モードにおいて送信点の座標を算出する際には、演算部22で取得した到達時間差tba,tca,tdaからそれぞれ上記時間差Δtba,Δtca,Δtdaが差し引かれて補正され、補正後の値を用いて送信点の座標が演算される。
【0088】
次に、到達時間差のずれを補正する他の例について説明する。
【0089】
この例では、先ずRFID読取装置3を予めその座標が判明している位置に配置しておく。そうすると、このRFID読取装置3と各受信アンテナ11a〜11dとの距離が決まる。このとき、このRFID読取装置3と各受信アンテナ11a〜11dまでの距離と電波の伝送速度から、各受信アンテナ11a〜11d間の理論的な受信到達時間差を算出することができる。この時間差は、送信位置検出装置1に外部から入力してもよいし、制御部15で算出してもよい。
【0090】
次に、補正モードにおいて上記RFID読取装置の座標の取得を行い、そのときの受信到達時間差と理論的な受信到達時間差とを比較して、それぞれの差分を算出する。算出した差分は、例えば演算部22の記憶部に補正値として記憶する。
【0091】
以後、通常の動作モードにおいて送信点の座標を演算する際には、上記記憶部に記憶したそれぞれの補正値を用いて、到達時間差tba,tca,tdaを補正する。
【0092】
以上説明したように、算出した到達時間差tba,tca,tdaを補正する機能を設け、補正後の到達時間差を用いて送信点の座標を検出するようにした。このようにしたことにより、回路遅延のばらつきや配線長のばらつきによる誤差が吸収され、送信点の位置検出の精度が大幅に向上する。
【0093】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0094】
第1の実施形態と同一の構成要素には同一の符号を付し、重複説明は必要な場合にのみ行う。本実施形態は、前記実施形態における計測部の構成が異なるだけで、それ以外の構成は同じである。そのため、計測部についてのみ詳述する。
【0095】
図15に本実施形態における計測部の概略ブロック図を示している。このブロック図は、図3で示した計測部14を計測部114に置き換えたものであり、TDCのStart入力に制御部15からの信号を使用しない構成を実現するものである。
【0096】
計測部114は、TDC123〜128と演算部122とで構成されている。TDC123は、増幅部13aの出力をStart入力とし、増幅部13bの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tba+を演算部122に出力する。TDC124は、増幅部13bの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tba−を演算部122に出力する。
【0097】
TDC125は、増幅部13aの出力をStart入力とし、増幅部13cの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tca+を演算部122に出力する。TDC126は、増幅部13cの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間Tca−を演算部122に出力する。
【0098】
TDC127は、増幅部13aの出力をStart入力とし、増幅部13dの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tda+を演算部122に出力する。TDC128は、増幅部13dの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tda−を演算部122に出力する。
【0099】
送信位置検出装置1と無線送信源との配置によって、増幅部13aと増幅部13bの出力が“H”になる順番が異なる。増幅部13aの出力が先に“H”になった場合、TDC123で受信アンテナ11a,11bの到達時間差が計測されることになる。TDC124では増幅部13bの出力が“H”になった後、次に増幅部13aの出力が“H”になるまでの時間が計測されるので、時間tba−は時間tba+より長くなる。逆に、増幅部13bの出力が先に“H”になった場合、TDC124で受信アンテナ11a,11bの到達時間差が計測されることになる。TDC123では増幅部13aの出力が“H”になった後、次に増幅部13bの出力が“H”になるまでの時間が計測される。演算部122は、時間tba+,tba−のうち、短い一方を演算に使用する時間として採用する。
【0100】
同様に、演算部122は、時間tca+,tca−の短い一方を演算に使用する時間として採用し、時間tda+,tda−の短い一方を演算に使用する時間として採用する。
【0101】
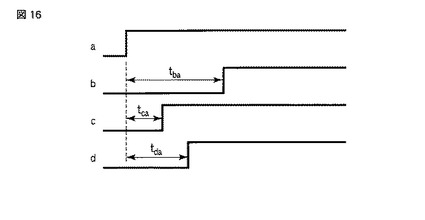
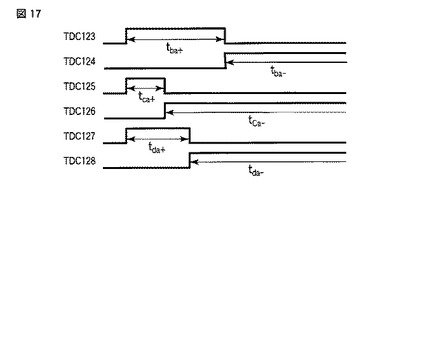
計測部114の動作を説明すべく、各TDC123〜128の入出力波形の一例を図16,図17に示す。図16は、それぞれ増幅部13a〜13dの出力信号a〜d、すなわち各TDC123〜128への入力信号波形を示す。図17は、各TDC123〜128からの出力信号波形を示す。
【0102】
増幅部13aの出力aが“H”になると、TDC123とTDC125とTDC127のStart入力が“H”になり、時間の計測を開始する。
その後、増幅部13cの出力cが“H”になると、TDC125のStop入力が“H”になり、TDC126のStart入力が“H”になる。TDC125は、Stop入力が“H”になったので、時間tca+を出力する。
【0103】
次に、増幅部13dの出力dが“H”になると、TDC127のStop入力が“H”になり、TDC128のStart入力が“H”になる。TDC127は、Stop入力が“H”になったので、時間tda+を出力する。
【0104】
次に、増幅部13bの出力bが“H”になると、TDC123のStop入力が“H”になり、TDC124のStart入力が“H”になる。TDC123は、Stop入力が“H”になったので、時間tba+を出力する。
【0105】
図17の例では、TDC124とTDC126とTDC128は、時間測定が終了していない。時間測定可能な最長時間内に終了しない場合は、TDC124,126,128による測定終了時までの時間(上記最長時間)をそれぞれtba−,tca−,tda−とする。
【0106】
演算部122は、上述したように、tba+とtba−、tca+とtca−、tda+とtda−を比較し、短い一方を座標演算用に採用する。採用した3つの時間は、各受信アンテナ11a〜11dへの無線送信源からの到達時間差である。演算部122は、これら到達時間差を用いて、無線送信源の座標を演算する。
【0107】
(変形例)
上記各実施形態にて開示した構成は、種々変形実施可能である。具体的な変形例としては、例えば次のようなものがある。
【0108】
(1)上記各実施形態においては、受信アンテナ、復調部、および増幅部を4つずつ使用する場合を例示した。しかしながら、受信アンテナ、復調部、および増幅部の数は、5つ以上であってもよい。
【0109】
受信アンテナ等が5つ以上ある場合は、ニュートン法に最小二乗法を組み合わせた演算方法を使用することにより、送信点の座標を求めることができる。受信到達時間差を計測する数が多くなると、算出した座標が実際の座標に近づく傾向があるので、受信アンテナ、復調部、および増幅部を5つ以上使用することで、送信位置検出装置の位置検出精度を高めることができる。
【0110】
(2) 上記各実施形態においては、送信位置検出装置1のQuery受信完了前と識別情報受信完了前に座標を求めるものとして説明を行ったが、座標を求める演算を各受信完了後に行ってもよい。
【0111】
(3)上記各実施形態では、制御部15や演算部22,122の記憶部に各処理用のプログラムが予め記憶されているものとして説明した。しかしながら、これに限らず各プログラムをサーバからダウンロードしても良いし、同様の機能を記録媒体に記憶させたものを送信位置検出装置にインストールしてもよい。記録媒体としては、CD−ROM等を利用でき、かつ送信位置検出装置が読取り可能な記録媒体であれば、その形態は何れの形態であってもよい。またこのように予めインストールやダウンロードにより得る機能は送信位置検出装置内部のOS(Operating System)等と協働してその機能を実現させるものであってもよい。
【0112】
なお、本発明はいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0113】
1…送信位置検出装置、2…サーバ、3…RFID読取装置、4…RFIDタグ、11(11a,11b,11c,11d)…受信アンテナ、12(12a,12b,12c,12d)…復調部、13(13a,13b,13c,13d)…増幅部、14,114…計測部、15…制御部、16…発振部、21(21a,21b,21c,21d),123,124,125,126,127,128…TDC、22,122…演算部。
【技術分野】
【0001】
本発明の実施形態は、無線送信源の位置を検出する装置,方法および送信位置検出システム並びにプログラムに関する。
【背景技術】
【0002】
RFID(Radio Frequency Identification)タグ(無線タグや応答器等とも称される)は、アンテナと無線通信部と記憶部を備えており、それぞれのRFIDタグにおける記憶部には各タグで重複しない識別情報が記憶されている。RFID読取装置(リーダライタや質問器とも称される)がRFIDタグに問合わせ信号を送信すると、RFIDタグは当該問合わせ信号に応じた処理を行う。例えば、RFIDタグが記憶している識別情報と、RFID読取装置からの問合わせ信号に含まれる識別情報とが一致した場合にだけ応答を返すRFIDタグが知られている。
【0003】
このような機能を有するRFIDタグは、例えば物品に取り付けることで、物流業の物品管理を始めとする様々な分野で使用されている。近年では、各種商品を販売する店舗において、各RFIDタグを商品に取り付けることにより、商品の販売や在庫管理を行うシステムも実用化されている。
【0004】
ところで、大量の物品を扱う業種においては、物品の種類や個数の管理だけでなく、各物品がどの位置に所在するのかを容易に認識できるようにしたいとの要望がある。RFIDタグの位置を検出するには、RFID読取装置がRFIDタグと通信を行うときのアンテナの指向性と受信信号の位相とから、RFIDタグの二次元の位置を検出する方法を採用し得る。
【0005】
しかしながら、上記の方法はRFIDタグの位置を二次元座標で求めるものである。このため、例えば棚に陳列された物品に付されるRFIDタグの位置検出に上記方法を採用した場合、どの棚に所望の物品が陳列されているかは知ることはできるが、棚の何段目に陳列されているかまでは知ることができない。また、アンテナの遠方界では指向性が絞れるが、近傍界では指向性が乏しくなる傾向がある。したがって、RFID読取装置からRFIDタグまでの距離が短いと、座標の検出精度が低下する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第7,873,326号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、RFIDタグ,RFID読取装置等の無線送信源の位置を三次元座標で求めることができ、しかもRFID読取装置とRFIDタグとのように無線送信源どうしの距離が短くても座標の検出精度が低下することのない送信位置検出システム及びこのシステムで用いる送信位置検出装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
一実施形態における送信位置検出装置は、無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、各受信アンテナが無線送信源から無線送信された信号を受信したときの各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて無線送信源の位置を示す三次元座標を演算する計測部とを備える。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態における送信位置検出システムの概略斜視図。
【図2】同実施形態における送信位置検出装置の概略ブロック図。
【図3】同実施形態における計測部の概略ブロック図。
【図4】同実施形態におけるTDCの動作を説明するための信号波形図。
【図5】同実施形態における無線送信源の座標演算を説明するための図。
【図6】同実施形態におけるRFID読取装置とRFIDタグとの通信を説明するための図。
【図7】同実施形態におけるRFID読取装置が送信するQuery(Q)の包絡線波形の一部を示す図。
【図8】同実施形態におけるRFIDタグが送信するプリアンブル(P)の波形を示す図。
【図9】同実施形態における送信位置検出装置の動作手順を示す流れ図。
【図10】同実施形態におけるサーバの動作手順を示す流れ図。
【図11】同実施形態におけるRFID読取装置の動作手順を示す流れ図。
【図12】同実施形態においてサーバに備えられているデータベースの模式図。
【図13】同実施形態において無線送信源の送信位置検出結果をx−z面の表示例として示す図。
【図14】同実施形態において無線送信源の送信位置検出結果をx−y面の表示例として示す図。
【図15】第2の実施形態における計測部の概略ブロック図。
【図16】同実施形態における各TDCへの入力信号波形図。
【図17】同実施形態における各TDCからの出力信号波形図。
【発明を実施するための形態】
【0010】
以下、各実施形態について、図面を参照しながら説明する。
(第1の実施の形態)
[要部構成]
先ず、本実施形態における送信位置検出システムの要部構成について説明する。
図1は、送信位置検出システムの概略斜視図であり、図2は、送信位置検出システムの概略ブロック図である。送信位置検出システムは、無線送信源であるRFID読取装置3と複数のRFIDタグ4(4a,4b,4c,…)のそれぞれの位置を三次元座標(x,y,z)で求めるもので、送信位置検出装置1とサーバ2とを含む。
【0011】
送信位置検出装置1は、サーバ2と有線で通信する。サーバ2は、RFID読取装置3と無線で通信する。サーバ2とRFID読取装置3との間の無線通信は、無線LANまたはBluetooth(登録商標)のように、送信局のアドレス(MACアドレスまたはBluetoothアドレス)を含むパケットを使用する。
【0012】
RFID読取装置3は、各RFIDタグ4(4a,4b,4c・・・)と無線で通信する。RFID読取装置3と各RFIDタグ4との間の無線通信は、一般的なRFID技術の通信プロトコルに従う。本実施形態では、近年広く普及しつつあるEPC globalのClass1 Generation2規格(以下、C1G2規格と称する)に従って通信する。
【0013】
送信位置検出装置1は、例えば図1に示すように、直方体形状の筐体を有している。そして、この筐体の内部に、それぞれ4つの受信アンテナ11(11a,11b,11c,11d)を配置している。さらに送信位置検出装置1は、図2に示すように、各受信アンテナ11にそれぞれ対応して4つの復調部12(12a,12b,12c,12d)と増幅部13(13a,13b,13c,13d)を備えるとともに、計測部14、制御部15及び発振部16を備えている。
【0014】
各受信アンテナ11a〜11dの配置には制限がある。例えば、4つの受信アンテナ11a〜11dを同一平面であるx−y面上に配置し、各受信アンテナ11a〜11dが長方形の頂点を取る形状であるとする。この場合、長方形の対角線の交点を通りかつこの長方形の面に垂直なz軸方向の線上では、どの点からも各受信アンテナ11a〜11dは等距離となる。このため、各受信アンテナ11a〜11dの相互間で到達時間に差が生じないので、z軸方向の距離を求めることができない。
【0015】
このような不具合を回避するために、各受信アンテナ11a〜11dを同一平面上に配置する場合には、以下の条件で配置する。すなわち、各受信アンテナ11a〜11dを頂点とする四角形としたときに、向かい合った角の和が180度にならないで、かつ、2つの対角線の中央が同じ点とならないように配置する。なお、各受信アンテナ11a〜11dを同一平面上に配置しなくてもよい。各受信アンテナ11a〜11dを同一平面上に配置しない場合には、各受信アンテナ11a〜11dが正四面体の頂点とならないように配置する。
【0016】
各受信アンテナ11a〜11dは、位置検出の精度の観点からは、点であることが理想である。しかし、現実的には受信電波の波長に依存する大きさが必要である。ただし、利得の高い指向性アンテナを使用する必要は無い。むしろ、誘電率の高い材質も用いて波長短縮し、小型化したアンテナを使用することが好ましい。
【0017】
RFID読取装置3とRFIDタグ4から放射された電波は、空間を通過して各受信アンテナ11a〜11dに到達する。各受信アンテナ11a〜11dは、前記の条件で配置されているので、電波を放射する無線送信源(RFID読取装置3またはRFIDタグ4)の位置から各受信アンテナ11a〜11dまでの距離は、アンテナ毎に異なる。このため、各受信アンテナ11a〜12dに電波が到達するまでの時間も、アンテナ毎に異なる。自由空間中を伝播する電波の速度は、約3×108m/sである。したがって、例えば、無線送信源から受信アンテナ11aまでの距離と、無線送信源から受信アンテナ11bまでの距離との差が1mのときには、約3.3ns(3300ps)の到達時間差が生じ、同距離の差が10cmのときには、約0.33ns(330ps)の到達時間差が生じる。
【0018】
各受信アンテナ11a〜11dは、それぞれ受信した電波を高周波信号に変換し、この高周波信号を対応する復調部12a〜12dに出力する。復調部12aは、受信アンテナ11aから出力される高周波信号と発振部16の出力を合成してベースバンド信号に変換し、このベースバンド信号を増幅部13aに出力する。他の復調部12b〜12dも同様に、それぞれ受信アンテナ11b〜11dから出力される高周波信号と発振部16の出力を合成してベースバンド信号に変換し、このベースバンド信号をそれぞれ増幅部13b〜13dに出力する。各復調部12a〜12dから出力されるベースバンド信号には、一般的にはRSSI(Received Signal Strength Indication)と呼ばれる受信信号強度を測定するための振幅情報を含んでいる。
【0019】
増幅部13aは、復調部12aから出力される信号を増幅して飽和させ、“H(High)”または“L(Low)”で表わされる2値情報として出力する。他の増幅部13b〜13dも同様に、それぞれ復調部12b〜12dから出力されるベースバンド信号を増幅し、2値情報として出力する。なお、各増幅部13a〜13dに代えてコンパレータを用いてもよい。
【0020】
増幅部13aから出力される2値情報の信号は、計測部14と制御部15に入力される。他の増幅部13b〜13dから出力される2値情報の信号は、計測部14にのみ入力され、制御部15には入力されない。制御部15は、増幅部13aから出力された信号を復号し、復号したデータに応じた処理を行う。具体的には、RFID読取装置3が送信する信号の振幅は大きく、RFIDタグ4が送信するバックスキャッタ信号の振幅は小さい。このため、RFID読取装置3の信号を受信するときの利得は小さく、RFIDタグ4の信号を受信するときの利得は大きくなるように、制御部15は、各増幅部13a〜13dの利得を制御する。なお、増幅部13aの出力のみ制御部15へ入力するとしたが、増幅部13b,13cまたは13dから出力された信号を制御部15に入力する構成としてもよい。
【0021】
このように、無線送信源であるRFID読取装置3及びRFIDタグ4から送信された信号は、各増幅部13a〜13dの出力段階で2値情報となる。この2値情報の出力が“L”から“H”に変化するタイミングは、RFID読取装置3またはRFIDタグ4からの電波が各受信アンテナ11a〜11dに到達した時間によって決まる。
【0022】
計測部14は、各増幅部13a〜13dから入力される信号の時間差を検出する。そして計測部14は、それぞれの時間差と受信アンテナ11a〜11dの座標データとに基づいて、受信した信号を送信した無線送信源の位置を三次元座標として算出する。ここで算出される三次元座標は、送信位置検出装置1を基準とした座標である。計測部14は、算出した三次元座標値を制御部15へ出力する。
【0023】
制御部15は、図示しないCPU(Central Processing Unit)と記憶部を備えている。制御部15は、記憶部に記憶されたプログラムに従って動作し、増幅部13(13a,13b,13c,14d)、計測部14及び発振部16を制御する。また制御部15は、増幅部13aから出力された信号と計測部14から出力された三次元座標値とを関連付けし、サーバ2へ送信する。さらに制御部15は、サーバ2からRFID読取装置3が使用する周波数情報を受信する。
【0024】
発振部16は、高周波信号を発生し、この高周波信号を各復調部12a〜12dに出力する。発振部16の発振周波数は、RFID読取装置3が送信する電波を復調するために必要とする周波数である。例えば、復調部12がダイレクトコンバージョン方式を採用している場合には、発振周波数は、RFID読取装置3が送信する搬送波と同じ周波数となる。これに対し、復調部12が中間周波数を使用する方式を採用している場合には、発振周波数は、RFID読取装置3が送信する搬送波周波数から中間周波数を引き算した値の周波数となる。このような発振周波数は、制御部15からの信号に応じて変更することができる。
【0025】
[時間計測]
図3に計測部14の概略ブロック図を示す。計測部14は、4つのTDC(Time to Digital Converter)21(21a,21b,21c,21d)と、演算部22とを備えている。
【0026】
各TDC21a〜21dは、Start入力用の端子と、Stop入力用の端子と、出力端子とを有している。各TDC21a〜21dは、Start入力が“L”から“H”に変化した後に、Stop入力が“L”から“H”に変化するまでの時間に応じたデジタル値を出力する。近年は、180nmプロセスのCMOS(Complementary Metal Oxide Semiconductor)技術を使用して、10ps程度の測定分解能が得られている。製造プロセスが微細化すれば、さらに短い時間を測定する分解能を得ることができる。
【0027】
各TDC21a〜21dのStart入力用の端子は、制御部15に接続されている。TDC21aのStop入力用の端子は、増幅部13aに接続されている。他のTDC21b〜21dのStop入力用の端子も同様に、それぞれ対応する増幅部13b〜13dに接続されている。各TDC21a〜21dの出力端子は、演算部22に接続されている。
【0028】
各TDC21a〜21dの動作を、図4に示す信号波形を参照して説明する。
先ず、各TDC21a〜21dへのStart入力およびStop入力は、全て“L”になっている。制御部15からのStart入力が“H”になると、各TDC21a〜21dは、それぞれ時間測定を開始する。TDC21aへのStop入力が“H”になると、TDC21aは、計測時間としてtaを出力する。次に、TDC21cへのStop入力が“H”になると、TDC21cは、計測時間としてtcを出力する。TDC21dへのStop入力が“H”になると、TDC21dは、計測時間としてtdを出力する。TDC21bへのStop入力が“H”になると、TDC23bは、計測時間としてtbを出力する。
【0029】
このように、制御部15は、各TDC21a〜21dへのStart入力を“H”にすることで、計測部14に時間計測を開始させる。各TDC21a〜23dへのStart入力を“H”にするタイミングは、受信アンテナ11aから制御部15に入力される信号に応じて決定される。その決定方法については後述する。
【0030】
演算部22は、図示しない記憶部を備えている。演算部22は、この記憶部に記憶されたプログラムに従って動作し、入力された各計測時間ta,tb,tc,tdから、各信号の到達時間差を算出する。受信アンテナ11aと受信アンテナ11bの到達時間差tbaは、tb−taから求まり、受信アンテナ11aと受信アンテナ11cの到達時間差tcaは、tc−taから求まり、受信アンテナ11aと受信アンテナ11dの到達時間差tdaは、td−taから求まる。
【0031】
こうして、各到達時間差tba,tca,tdaを求めた後、演算部22は、受信アンテナ11a〜11dの座標を用いて、無線送信源(RFID読取装置3またはRFIDタグ4)の座標を算出する。ここで算出する座標は、送信位置検出装置1を基準とする座標である。
【0032】
[座標演算]
図5を用いて無線送信源の座標演算について説明する。
【0033】
受信アンテナ11aの座標は(xa,ya,za)、受信アンテナ11bの座標は(xb,yb,zb)、受信アンテナ11cの座標は(xc,yc,zc)、受信アンテナ11dの座標は(xd,yd,zd)で既知であり、演算部22が有する記憶部等に予め記憶されている。
【0034】
1つの無線送信源の座標をP点(xP,yP,zP)とし、電波の伝達速度をCとする。そうすると、各受信アンテナ11a〜11dの座標(xa,ya,za),(xb,yb,zb),(xc,yc,zc),(xd,yd,zd)と到達時間差tba,tca,tdaとを用いて、下記の数式[数1],[数2],[数3]が成立する。
【数1】
【0035】
【数2】
【0036】
【数3】
【0037】
数式[数1],[数2],[数3]において、xP,yP,zP以外は既知の値である。このため、これら3つの連立方程式を解くことにより、無線送信源の座標であるP点(xP,yP,zP)の値を求めることができる。この非線形連立方程式は、ニュートン法等の数値計算方法を使用することによって解を求めることができる。
【0038】
ただし、各受信アンテナ11a〜11dが同一平面に配置されている場合は、解が2つ存在する。そこで、本システムは、送信位置検出装置1を壁等に設置する。そうすることにより、送信位置検出装置1の背面側(z軸の負の方向)には無線送信源が存在しないため、zPの値が正となる解を無線送信源の座標とすることができる。各受信アンテナ11a〜11dを同一平面に配置しない場合は、解は1つになるため、送信位置検出装置1をどのように設置してもよい。
【0039】
ここで、RFID読取装置3とRFIDタグ4との通信について、図6を用いて説明する。図6の(a)は、RFID読取装置3の送信データであり、斜線を付した部分は搬送波のみが送信されている状態を示している。図6の(b)は、RFIDタグ4の送信データである。
【0040】
C1G2規格の通信においては、先ずRFID読取装置3が搬送波を送信する。RFIDタグ4は、この搬送波を受信することによって起動する。次に、RFID読取装置3は、プリアンブル(P)を送信し、続いて、読取り開始を知らせるQuery(Q)を送信する。
【0041】
RFIDタグ4は、プリアンブル(P)を受信すると、このプリアンブル(P)に続くデータを受信できるように同期を取るために、受信速度を決定する。そして、Query(Q)を受信すると、RFIDタグ4は、そのQuery(Q)の内容に従った設定を行う。その後、RFIDタグ4は、ランダムに選択したスロットで応答を送信する。本実施形態では、説明の都合上、RFIDタグ4が直ちに応答するものとして説明を続ける。
【0042】
RFIDタグ4は、Query(Q)を受信した後、プリアンブル(P)を送信し、続いて、16ビットの擬似乱数(RN16)を送信する。擬似乱数は、暗号文字列として使用されるために、以後の通信の間保持される。RFID読取装置3は、プリアンブル(P)と擬似乱数(RN16)を受信すると、フレーム同期を取るためのFrame−Sync(F)を送信し、続いて、正しく受信できたことを知らせる応答信号(ACK)を送信する。
【0043】
RFIDタグ4は、応答信号(ACK)を受信すると、プリアンブル(P)とデータ(Data)とデータ誤り検出符号(CRC:Cyclic Redundancy Check)を送信する。このときのデータ(Data)の中に、RFIDタグ4毎に固有の識別情報、すなわちC1G2規格のEPC(Electronic Product Code)が含まれている。
【0044】
RFID読取装置3は、プリアンブル(P)、データ(Data)及びデータ誤り検出符号(CRC)を受信すると、データ誤り検出符号(CRC)を用いて伝送エラーの有無を検出する。その結果、正しく受信したと判断すると、RFID読取装置3は、Frame−sync(F)を送信し、続いて、QueryRep(QR)を送信する。これに対し、正常に受信できなかったと判断した場合には、RFID読取装置3は、QueryRep(QR)に代えて、正常に受信できなかったことを通知する応答信号(NAK)を送信し、RFIDタグ4に再送を要求する。RFID読取装置3の交信領域内にあるRFIDタグ4が1つだけのときは、ここまでの処理で通信が完了する。
【0045】
RFID読取装置3の交信領域内にRFIDタグ4が複数ある場合には、QueryRep(QR)の後に、別のRFIDタグ4がプリアンブル(P)と擬似乱数(RN16)とを送信する。RFID読取装置3は、擬似乱数(RN16)を受信すると、Frame−Sync(F)と正常応答信号(ACK)とを送信し、これを受信したRFIDタグ4がプリアンブル(P)、データ(Data)およびデータ誤り検出符号(CRC)を送信する。RFID読取装置3は、データ(Data)を正常に受信すると、Frame−Sync(F)を送信する。このような処理を繰り返すことによって、RFID読取装置3は、交信領域内にある複数のRFIDタグ4の識別情報を取得する。
【0046】
図7にRFID読取装置3が送信するQuery(Q)の包絡線波形の一部を示す。C1G2規格では、符号化方式として、“0”を表す時間を短く、“1”を表す時間を長くするPIE(Pulse-interval encoding)がQuery(Q)として使用される。PIEは、“0”と“1”を表す時間長は異なるが、振幅を小さくする時間長は同じである。すなわちPIEは、振幅が小さくなっている時間が一定である。このため、Query(Q)を受信し、その振幅が小さくなると、振幅が大きくなるタイミングを誰もが予想できる。
【0047】
制御部15は、PIEの振幅が小さくなったときを検出すると、振幅が大きくなる前に各TDC21a〜21dのStart入力を一斉に“H”にする。これにより、各TDC21a〜21dは、時間計測を開始する。各増幅部13a〜13dは、対応する復調部12a〜12dから入力される信号の振幅が図7に示すしきい値より大きいときは“H”を出力し、小さいときは“L”を出力する。したがって、制御部15がStart入力を一斉に“H”にしてから、対応する増幅部13a〜13dの出力が最初に“H”になるまでの間、各TDC21a〜21dは、時間ta,tb,tc,tdを測定する。
【0048】
図8にRFIDタグ4が送信するプリアンブル(P)の波形を示す。なお、図8は、C1G2規格でFM0符合を使用するときのプリアンブル(P)である。FM0符合においては、“0”を表わすときは1ビットの中心でレベルを“H”から“L”または“L”から“H”に反転させ、“1”を表わすときは1ビットの中でレベルを一定に保ち、変化させない、また、あるビットから次のビットに切り替わるときにレベルを反転させる。“V”は、FM0符合のルールに従わないビットであり、プリアンブル(P)の中だけに表れる。
【0049】
通常、プリアンブル(P)の先頭においては、ビット同期をとるために、同じパターンが繰り返される。その後、別の決められたパターンを使用して、プリアンブル(P)の後に続く情報との境目がわかるようにしている。図8では、“0”が5つ連続で現れている箇所がビット同期に使用され、その後の“1010V1”より後がデータとなる。
【0050】
送信位置検出装置1は、このような手順で行われる通信を受信する。制御部15は、正常応答信号(ACK)を受信した後のプリアンブル(P)を受信すると、ビット同期を取る。こうして、ビット同期をとった後は、制御部15は、受信信号のレベルが変化するタイミングを予想できる。
【0051】
そこで制御部15は、ビット同期をとって“V”を検出した直後、受信信号レベルが“L”から“H”に最初に変化する前に各TDC21a〜21dのStart入力を一斉に“H”にする。これにより、各TDC21a〜21dは、時間計測を開始する。一方、各増幅部13a〜13dは、それぞれ受信信号レベルが“L”から“H”に変化すると、“H”を出力する。したがって、制御部15がStart入力を一斉に“H”にしてから、対応する増幅部13a〜13dの出力が最初に“H”になるまでの間、各TDC21a〜21dは、時間ta,tb,tc,tdを測定する。
【0052】
なお、図2のブロック図では、増幅部13aの出力を制御部15に入力して、受信データを取得している。無線送信源から受信アンテナ11aまでの距離が最短ではなく、無線送信源から他の受信アンテナ11b〜11dまでの距離が短いことがある。各受信アンテナ11a〜11dが図5のように配置されているとき、受信アンテナ11aから最も遠くにある受信アンテナが受信アンテナ11dであるとすると、受信アンテナ11aと受信アンテナ11dの最大到達時間差tmは、下記の数式[数4]で表わすことができる。
【数4】
【0053】
受信アンテナ11aに対して最も遠くにある受信アンテナが他のアンテナである場合でも、同様の計算式にて受信アンテナ11aと最も遠くにあるアンテナとの最大到達時間差tmを求めることができる。
【0054】
これらを考慮すると、受信信号のレベルが“L”から“H”に変化すると予想される時点から最大到達時間差tmより前の時間に、各TDC21a〜21dへのStart入力を“H”にすればよい。言い換えると、時間測定を開始するタイミングは、受信アンテナ間の最大距離を電波が伝達する時間より後に各受信アンテナ11a〜11dの受信信号レベルが変化するように設定すればよい。
【0055】
また、測定時間が長すぎると、次の受信信号レベルの変化点が現れてしまうので、次の変化点が現れる前に測定を終了することが好ましい。伝送速度と符号化方式により、信号レベルの変化点が現れる時間間隔が決まるので、これから測定終了時間を決めればよい。
【0056】
以上のように時間測定の開始と終了のタイミングを決定することによって、送信位置検出装置1は、各受信アンテナ11a〜11dと無線送信源(RFID読取装置3及びRFIDタグ4)との配置に関係なく、全ての受信アンテナ11a〜11dに到達する信号のレベル変化タイミングを捉えることができる。そして送信位置検出装置1は、測定した時間差から無線送信源の位置を特定することができる。
【0057】
しかも、送信位置検出装置1は、識別情報を含むデータのプリアンブル(P)を利用してRFIDタグ4の位置を検出するので、RFIDタグ4の識別情報と位置を一度に検出することができる。したがって、複数のRFIDタグ4の識別情報を検出した場合、送信位置検出装置1は、それぞれの識別情報に対応する位置も検出することができる。
【0058】
なお、本実施形態では、プリアンブル(P)の“V”の位置で各TDC21a〜21dのStart入力を“H”にするが、ビット同期が取れた後であれば、任意の受信信号レベルの変化点付近で同様に時間を測定することができる。
【0059】
[システムの動作]
次に、送信位置検出システムの動作を図9〜図11を用いて説明する。図9は、送信位置検出装置1の動作手順を示す流れ図であり、図10は、サーバ2の動作手順を示す流れ図である。また、図11は、RFID読取装置3の動作手順を示す流れ図である。
【0060】
本システムでは、先ず、RFID読取装置3が、RFIDタグ4の読取を開始する前に、送信設定情報をサーバ2に送信する(図11のST31)。送信設定情報は、RFIDタグ4の読取を行うための周波数、伝送速度、および符号化方式を含む。
【0061】
サーバ2は、RFID読取装置3の送信設定情報を待機する(図10のST21)、そして、RFID読取装置3から送信設定情報を受信すると(ST21のYES)、サーバ2は、その受信した送信設定情報を送信位置検出装置1に転送する(図10のST22)。
【0062】
送信位置検出装置1は、RFID読取装置3の送信設定情報を待機する(図9のST1)。そして、サーバ2から同送信設定情報を受信すると(ST1のYES)、送信位置検出装置1は、その情報を基に各部の受信状態を設定する(図9のST2)。例えば送信位置検出装置1は、RFIDタグ4の読取に使用される周波数を受信できるように、発振部16を設定する。また、制御部15に対しては、受信に用いる伝送速度と符号化方式を設定する。
【0063】
続いて、RFID読取装置3は、RFIDタグ4を起動させるために、無変調波の送信を開始する(図11のST32)。そしてRFID読取装置3は、無変調波を所定時間送信した後でQuery(Q)を送信する(図11のST33)。RFID読取装置3から送信される信号は、RFIDタグ4で受信されるだけでなく、送信位置検出装置1でも受信される。
【0064】
Query(Q)の受信を開始した送信位置検出装置1は、前述したタイミングで、制御部15が各TDC21a〜21dのStart入力を“H”にする(図9のST3)。これにより、各TDC21a〜21dは、Start入力が“H”になってからStop入力が“H”になるまでの時間ta,tb,tc,tdを計測し、計測時間ta,tb,tc,tdを演算部22へ出力する(図9のST4)。演算部22は、入力された計測時間ta,tb,tc,tdに基づいて受信アンテナ11a〜11d毎の到達時間差tba,tca,tdaを算出する(図9のST5)。さらに演算部22は、算出した到達時間差tba,tca,tdaからRFID読取装置3の座標を算出する(図9のST6)。送信位置検出装置1は、Query(Q)の受信を完了するまでに(図9のST7)、上述したステップST3,4,5,6の処理を実行する。
【0065】
RFIDタグ4は、Query(Q)を受信すると、16ビットの擬似乱数(RN16)を送信する。RFIDタグ4から送信される擬似乱数(RN16)の信号は、RFID読取装置3で受信されるだけでなく、送信位置検出装置1でも受信される。
【0066】
Query(Q)を送信したRFID読取装置3は、擬似乱数(RN16)の受信を待機する(図11のST34)。RFIDタグ4から擬似乱数(RN16)を受信すると(ST34のYES)、RFID読取装置3は、応答信号(ACK)を送信する(図11のST35)。RFIDタグ4は、応答信号(ACK)を受信すると、固有の識別情報を送信する。識別情報は、プリアンブル(P)に続くデータ(Data)に含まれる。
【0067】
そこで、Query(Q)の受信を完了した送信位置検出装置1は、先ず、擬似乱数(RN16)の受信を待機する(図11のST8)。そして、RFIDタグ4から擬似乱数(RN16)を受信すると(ST8のYES)、続いて送信位置検出装置1は、応答信号(ACK)を待機する(図11のST9)。そして、RFID読取装置3から応答信号(ACK)を受信すると(ST9のYES)、送信位置検出装置1は、識別情報の受信を開始する。送信位置検出装置1は、プリアンブル(P)に含まれる“1010V”を受信中の前述したタイミングで、制御部15が各TDC21a〜21dのStart入力を“H”にする(図9のST10)。これにより、各TDC21a〜21dは、Start入力が“H”になってからStop入力が“H”になるまでの時間ta,tb,tc,tdを計測し、計測時間ta,tb,tc,tdを演算部22へ出力する(図9のST11)。演算部22は、入力された計測時間ta,tb,tc,tdに基づいて受信アンテナ11a〜11d毎の到達時間差tba,tca,tdaを算出する(図9のST12)。さらに演算部22は、算出した到達時間差tba,tca,tdaから識別情報を送信したRFIDタグ4の座標を算出する(図9のST13)。
【0068】
一方、応答信号(ACK)を送信したRFID読取装置3は、RFIDタグ4の識別情報を待機する(図11のST36)、RFIDタグ4から識別情報を受信すると(ST36のYES)、RFID読取装置3は、QueryRep(QR)を送信する(図11のST37)。識別情報を送信したRFIDタグ4は、QueryRep(QR)を受信すると、処理を終了する。
【0069】
RFID読取装置3は、QueryRep(QR)を送信した後、他のRFIDタグとの通信が有るか否かを判断する(図11のST38)、通信が有る場合(ST38のYES)、RFID読取装置3は、擬似乱数(RN16)の受信処理(図11のST34)に戻る。通信が無い場合(ST38のNO)、RFID読取装置3は、送信を停止する(図11のST39)。
【0070】
送信位置検出装置1は、識別情報を含むデータ(Data)の受信を完了するのを待機する(図9のST14)。識別情報の受信を完了したならば(ST14のYES)、送信位置検出装置1は、QueryRep(QR)の受信を待機する(図9のST15)。QueryRep(QR)を受信したならば(ST15のYES)、送信位置検出装置1は、RFID読取装置3が通信を停止したか否かを判断する(図9のST16)。
【0071】
RFID読取装置3から次の擬似乱数(RN16)を受信した場合、RFID読取装置3は通信を停止していない。この場合(ST16のNO)、送信位置検出装置1は、擬似乱数(RN16)の受信処理(図9のST8)に戻る。
【0072】
これに対し、RFID読取装置3からの受信がなく、通信が終了したと判断した場合には(ST16のYES)、送信位置検出装置1は、無線送信源の送信位置情報をサーバ2へ送信する(図9のST17)。以上で、送信位置検出装置1は、今回の処理を終了する。ここで、サーバ2に送信される無線送信源の送信位置情報には、今回の処理で送信位置検出装置1が取得したRFID読取装置3の座標と、RFIDタグ4の識別情報及び座標とが含まれる。
【0073】
一方、通信を停止したRFID読取装置3は、今回の処理でRFIDタグ4から読取った識別情報をサーバ2に送信する(図11のST40)。このとき、RFID読取装置3は、自己のアドレスをRFIDタグの識別情報とともに送信する。
【0074】
送信設定情報を送信位置検出装置1に送信したサーバ2は、無線送信源の送信位置情報を待機する(図10のST23)。そして、送信位置検出装置1から無線送信源の送信位置情報を受信すると(ST23のYES)、サーバ2は、その送信位置情報をメモリで一時的に記憶する(図10のST24)。また、サーバ2は、RFID読取装置3で読み取ったRFIDタグ4の識別情報を、当該RFID読取装置3のアドレスとともに取得する(図10のST25)。そして、サーバ2は、送信位置情報に含まれるRFIDタグの識別情報と、RFID読取装置3で読み取ったRFIDタグ4の識別情報とを照合して一致するか否かを判断する(図10のST26)。一致しない場合(ST26のNO)、サーバ2は、今回の処理を終了する。
【0075】
これに対し、送信位置情報に含まれるRFIDタグ4の識別情報と、RFID読取装置3で読み取ったRFIDタグ4の識別情報とが一致する場合には(ST26のYES)、サーバ2は、当該RFID読取装置3のアドレスと関連付けて、無線送信源の送信位置情報をデータベースに保存する(図10のST27)。また、サーバ2は、データベースに保存した無線送信源の送信位置情報を、この送信位置情報に関連付けられたアドレスで特定されるRFID読取装置3に送信する(図10のST28)。以上で、サーバ2は、今回の処理を終了する。
【0076】
ここで、サーバ2に備えられているデータベースの模式図を図12に示す。データベースは、RFID読取装置3のアドレス(AAAAA)に関連付けて、このRFID読取装置3の座標(a1,b1,c1)と、このRFID読取装置3で読取った各RFIDタグ4の識別情報及びその座標とを保存する。例えば、識別情報(BBBBB)のRFIDタグ4の座標は(a2,b2,c2)、識別情報(CCCCC)のRFIDタグ4の座標は(a3,b3,d3)、識別情報(DDDDD)のRFIDタグ4の座標は(a4,b4,d4)となる。
【0077】
なお、図示しないが、データベースでは、識別情報に関連付けられた物品情報も記憶しており、識別情報の座標からその識別情報のRFIDタグ4を付けている物品の座標を知ることができる。
【0078】
このように、サーバ2は、RFID読取装置3から受信したRFIDタグ4の識別情報と、送信位置検出装置1から受信したRFIDタグ4の識別情報とを照合して、同じであることを条件に、無線送信源(RFID読取装置3及びRFIDタグ4)の送信位置情報を、RFID読取装置3のアドレスと関連付けて記憶する。したがって、C1G2規格のようにRFID読取装置3とRFIDタグ4の通信においてRFID読取装置3を識別する情報が無く、複数のRFID読取装置3が存在する場合でも、RFID読取装置3とその座標を特定することができる。
【0079】
送信を停止したRFID読取装置3は、無線送信源の送信位置情報を待機する(図11のST41)。そして、サーバ2から無線送信源の送信位置情報を受信すると(ST41のYES)、RFID読取装置3は、表示部に無線送信源の送信位置検出結果を表示する(図11のST42)。以上で、今回の処理を終了する。
【0080】
図13及び図14は、無線送信源の送信位置検出結果を示す表示例である。図13及び図14において、星型33がRFID読取装置3の検出位置を表わし、黒丸34a,34b,34cがRFIDタグ4の検出位置を表わしている。図13は、x−z面の表示であり、図14は、x−y面の表示である。このように表示することにより、RFID読取装置3のオペレータに、無線送信源であるRFID読取装置3とRFIDタグ4の位置を知らせることができる。
【0081】
なお、黒丸34a,34b,34cに、識別情報を表示してもよいし、識別情報に関連付けされた物品情報を表示してもよい。また、この表示に棚や通路等を追加することによって、無線送信源の位置がさらに分かりやすくなる。また、RFID読取装置3が読取ったRFIDタグ4の方向に、RFID読取装置3が向いていると推定することも可能である。
【0082】
[座標演算の補正]
各受信アンテナ11a〜11dから計測部14までの間の回路で、回路遅延のばらつきや配線長のばらつき等が生じることがある。例えば、受信信号が受信アンテナ11aから入力されてTDC21aに入力される時間と、受信アンテナ11bから入力されてTDC21bに入力される時間には、若干の差が生じ得る。この若干の差を補正すると、演算した座標と実際の座標のずれを小さくすることができる。
【0083】
そこで、上記ずれを最小限にするため、到達時間差tba,tca,tdaの補正値を取得する機能を演算部22に設け、取得した補正値にて補正した後の到達時間差tba,tca,tdaを用いて送信点の座標を演算する。
【0084】
各受信アンテナ11a〜11dの間で生じる到達時間差のずれを補正する一例について説明する。
【0085】
補正値の取得は、例えば補正モードなるモードで送信位置検出装置1を起動した際に実行される。その際、予め受信アンテナ11aと受信アンテナ11bから等距離となる場所にRFID読取装置3を配置しておく。この状態で、前述した方法で座標の取得を行う。
【0086】
このとき、受信アンテナ11aと受信アンテナ11bへの電波の到達時間は同じであるため、回路における伝達遅延差がTDC21aとTDC21bの入力時間差Δtbaとして現れる。この時間差Δtbaは、補正値として例えば演算部22の記憶部に記憶される。回路における伝達遅延差が無い場合は、Δtba=0である。さらに、受信アンテナ11aと受信アンテナ11c、受信アンテナ11aと受信アンテナ11dとの間でも同様に補正値である時間差Δtca,Δtdaを取得する。
【0087】
補正値を取得した後、通常の動作モードにおいて送信点の座標を算出する際には、演算部22で取得した到達時間差tba,tca,tdaからそれぞれ上記時間差Δtba,Δtca,Δtdaが差し引かれて補正され、補正後の値を用いて送信点の座標が演算される。
【0088】
次に、到達時間差のずれを補正する他の例について説明する。
【0089】
この例では、先ずRFID読取装置3を予めその座標が判明している位置に配置しておく。そうすると、このRFID読取装置3と各受信アンテナ11a〜11dとの距離が決まる。このとき、このRFID読取装置3と各受信アンテナ11a〜11dまでの距離と電波の伝送速度から、各受信アンテナ11a〜11d間の理論的な受信到達時間差を算出することができる。この時間差は、送信位置検出装置1に外部から入力してもよいし、制御部15で算出してもよい。
【0090】
次に、補正モードにおいて上記RFID読取装置の座標の取得を行い、そのときの受信到達時間差と理論的な受信到達時間差とを比較して、それぞれの差分を算出する。算出した差分は、例えば演算部22の記憶部に補正値として記憶する。
【0091】
以後、通常の動作モードにおいて送信点の座標を演算する際には、上記記憶部に記憶したそれぞれの補正値を用いて、到達時間差tba,tca,tdaを補正する。
【0092】
以上説明したように、算出した到達時間差tba,tca,tdaを補正する機能を設け、補正後の到達時間差を用いて送信点の座標を検出するようにした。このようにしたことにより、回路遅延のばらつきや配線長のばらつきによる誤差が吸収され、送信点の位置検出の精度が大幅に向上する。
【0093】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0094】
第1の実施形態と同一の構成要素には同一の符号を付し、重複説明は必要な場合にのみ行う。本実施形態は、前記実施形態における計測部の構成が異なるだけで、それ以外の構成は同じである。そのため、計測部についてのみ詳述する。
【0095】
図15に本実施形態における計測部の概略ブロック図を示している。このブロック図は、図3で示した計測部14を計測部114に置き換えたものであり、TDCのStart入力に制御部15からの信号を使用しない構成を実現するものである。
【0096】
計測部114は、TDC123〜128と演算部122とで構成されている。TDC123は、増幅部13aの出力をStart入力とし、増幅部13bの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tba+を演算部122に出力する。TDC124は、増幅部13bの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tba−を演算部122に出力する。
【0097】
TDC125は、増幅部13aの出力をStart入力とし、増幅部13cの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tca+を演算部122に出力する。TDC126は、増幅部13cの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間Tca−を演算部122に出力する。
【0098】
TDC127は、増幅部13aの出力をStart入力とし、増幅部13dの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tda+を演算部122に出力する。TDC128は、増幅部13dの出力をStart入力とし、増幅部13aの出力をStop入力とし、Start入力が“H”になってからStop入力が“H”になるまでの時間tda−を演算部122に出力する。
【0099】
送信位置検出装置1と無線送信源との配置によって、増幅部13aと増幅部13bの出力が“H”になる順番が異なる。増幅部13aの出力が先に“H”になった場合、TDC123で受信アンテナ11a,11bの到達時間差が計測されることになる。TDC124では増幅部13bの出力が“H”になった後、次に増幅部13aの出力が“H”になるまでの時間が計測されるので、時間tba−は時間tba+より長くなる。逆に、増幅部13bの出力が先に“H”になった場合、TDC124で受信アンテナ11a,11bの到達時間差が計測されることになる。TDC123では増幅部13aの出力が“H”になった後、次に増幅部13bの出力が“H”になるまでの時間が計測される。演算部122は、時間tba+,tba−のうち、短い一方を演算に使用する時間として採用する。
【0100】
同様に、演算部122は、時間tca+,tca−の短い一方を演算に使用する時間として採用し、時間tda+,tda−の短い一方を演算に使用する時間として採用する。
【0101】
計測部114の動作を説明すべく、各TDC123〜128の入出力波形の一例を図16,図17に示す。図16は、それぞれ増幅部13a〜13dの出力信号a〜d、すなわち各TDC123〜128への入力信号波形を示す。図17は、各TDC123〜128からの出力信号波形を示す。
【0102】
増幅部13aの出力aが“H”になると、TDC123とTDC125とTDC127のStart入力が“H”になり、時間の計測を開始する。
その後、増幅部13cの出力cが“H”になると、TDC125のStop入力が“H”になり、TDC126のStart入力が“H”になる。TDC125は、Stop入力が“H”になったので、時間tca+を出力する。
【0103】
次に、増幅部13dの出力dが“H”になると、TDC127のStop入力が“H”になり、TDC128のStart入力が“H”になる。TDC127は、Stop入力が“H”になったので、時間tda+を出力する。
【0104】
次に、増幅部13bの出力bが“H”になると、TDC123のStop入力が“H”になり、TDC124のStart入力が“H”になる。TDC123は、Stop入力が“H”になったので、時間tba+を出力する。
【0105】
図17の例では、TDC124とTDC126とTDC128は、時間測定が終了していない。時間測定可能な最長時間内に終了しない場合は、TDC124,126,128による測定終了時までの時間(上記最長時間)をそれぞれtba−,tca−,tda−とする。
【0106】
演算部122は、上述したように、tba+とtba−、tca+とtca−、tda+とtda−を比較し、短い一方を座標演算用に採用する。採用した3つの時間は、各受信アンテナ11a〜11dへの無線送信源からの到達時間差である。演算部122は、これら到達時間差を用いて、無線送信源の座標を演算する。
【0107】
(変形例)
上記各実施形態にて開示した構成は、種々変形実施可能である。具体的な変形例としては、例えば次のようなものがある。
【0108】
(1)上記各実施形態においては、受信アンテナ、復調部、および増幅部を4つずつ使用する場合を例示した。しかしながら、受信アンテナ、復調部、および増幅部の数は、5つ以上であってもよい。
【0109】
受信アンテナ等が5つ以上ある場合は、ニュートン法に最小二乗法を組み合わせた演算方法を使用することにより、送信点の座標を求めることができる。受信到達時間差を計測する数が多くなると、算出した座標が実際の座標に近づく傾向があるので、受信アンテナ、復調部、および増幅部を5つ以上使用することで、送信位置検出装置の位置検出精度を高めることができる。
【0110】
(2) 上記各実施形態においては、送信位置検出装置1のQuery受信完了前と識別情報受信完了前に座標を求めるものとして説明を行ったが、座標を求める演算を各受信完了後に行ってもよい。
【0111】
(3)上記各実施形態では、制御部15や演算部22,122の記憶部に各処理用のプログラムが予め記憶されているものとして説明した。しかしながら、これに限らず各プログラムをサーバからダウンロードしても良いし、同様の機能を記録媒体に記憶させたものを送信位置検出装置にインストールしてもよい。記録媒体としては、CD−ROM等を利用でき、かつ送信位置検出装置が読取り可能な記録媒体であれば、その形態は何れの形態であってもよい。またこのように予めインストールやダウンロードにより得る機能は送信位置検出装置内部のOS(Operating System)等と協働してその機能を実現させるものであってもよい。
【0112】
なお、本発明はいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0113】
1…送信位置検出装置、2…サーバ、3…RFID読取装置、4…RFIDタグ、11(11a,11b,11c,11d)…受信アンテナ、12(12a,12b,12c,12d)…復調部、13(13a,13b,13c,13d)…増幅部、14,114…計測部、15…制御部、16…発振部、21(21a,21b,21c,21d),123,124,125,126,127,128…TDC、22,122…演算部。
【特許請求の範囲】
【請求項1】
無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、
前記各受信アンテナが前記無線送信源から無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算する計測部と、
を備えたことを特徴とする送信位置検出装置。
【請求項2】
前記無線送信源から無線送信された信号を受信した前記受信アンテナから出力される信号を入力し、この入力された信号に応じて前記計測部の時間計測開始を制御する制御部、
をさらに具備したことを特徴とする請求項1に記載の送信位置検出装置。
【請求項3】
前記制御部は、前記受信アンテナから入力される信号が、RFIDタグのデータを読み取るRFID読取装置の送信データに含まれるQuery信号のとき、前記計測部の時間計測開始を制御することを特徴とする請求項2に記載の送信位置検出装置。
【請求項4】
前記制御部は、前記受信アンテナから入力される信号が、RFIDタグからRFID読取装置に対して送信される前記RFIDタグ固有の識別情報を含むデータのプリアンブル信号のとき、前記計測部の時間計測開始を制御することを特徴とする請求項2に記載の送信位置検出装置。
【請求項5】
前記計測部は、RFIDタグのデータを読み取るRFID読取装置が変調した信号の受信時に前記各受信アンテナ間の時間差を計測することを特徴とする請求項1記載の送信位置検出装置。
【請求項6】
前記計測部は、RFIDタグからRFID読取装置に送信される前記RFIDタグ固有の識別情報を含む信号の受信時に前記各受信アンテナ間の時間差を計測し、各時間差から演算された三次元座標とこの三次元座標の演算に用いられた各時間差の計測時に受信した識別情報またはこの識別情報に基づいて特定される情報とを関連付けて出力することを特徴とする請求項1に記載の送信位置検出装置。
【請求項7】
4つの前記受信アンテナを同一平面上に配置するとき、各アンテナを頂点とする四角形の形状が、向かい合った各の和が180度にならないで、かつ、2つの対角線の中心が同じ点とならないように配置することを特徴とする請求項1に記載の送信位置検出装置。
【請求項8】
無線送信源から無線送信された信号を、4つ以上の受信アンテナで受信し、
計測部が、前記無線送信源から無線送信された信号を前記各受信アンテナが受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算することを特徴とする送信位置検出方法。
【請求項9】
固有の識別情報を記憶するRFIDタグと無線通信を行って前記RFIDタグから前記識別情報を読取るRFID読取装置と前記無線通信以外の通信方式で通信を行うサーバと、
前記RFID読取装置と前記RFIDタグとの無線通信を4つ以上の受信アンテナで受信し、前記各受信アンテナが前記RFID読取装置または前記RFIDタグから無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記RFID読取装置と前記RFIDタグのそれぞれの位置を示す三次元座標を演算し、演算した結果を前記サーバに送信する送信位置検出装置と、
を備えたことを特徴とする送信位置検出システム。
【請求項10】
前記サーバは、前記RFID読取装置から前記RFIDタグの読取を行うための送信設定情報を受信すると、この送信設定情報を前記送信位置検出装置に転送し、
前記送信位置検出装置は、前記サーバから前記送信設定情報を受信すると、この送信設定情報に基づいて前記RFIDタグからの電波を受信できるように受信状態を設定することを特徴とする請求項9に記載の送信位置検出システム。
【請求項11】
前記送信位置検出装置は、演算した結果として前記RFID読取装置及び前記RFIDタグの三次元座標とともに前記RFIDタグの識別情報を前記サーバに送信し、
前記サーバは、前記RFID読取装置が読み取った前記RFIDタグの識別情報を前記RFID読取装置から取り込んで、前記RFID読取装置から取り込んだ前記RFIDタグの識別情報と前記送信位置検出装置から受信した前記RFIDタグの識別情報とが一致するとき、前記RFID読取装置のアドレスに関連付けて当該RFID読取装置の座標と、当該RFID読取装置が読み取った前記RFIDタグの座標とを記憶することを特徴とする請求項9に記載の送信位置検出システム。
【請求項12】
前記サーバは、前記RFID読取装置のアドレスに関連付けて記憶した当該RFID読取装置の座標と、当該RFID読取装置が読み取った前記RFIDタグの座標とを、前記アドレスで特定されるRFID読取装置に送信することを特徴とする請求項11に記載の送信位置検出システム。
【請求項13】
無線送信源から無線送信された信号を受信するための4つ以上の受信アンテナを配置した筐体を有したコンピュータに、
前記各受信アンテナが前記無線送信源から無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測する計測機能と、
この計測機能によって計測された各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算する演算機能と、
を実現させるための送信位置検出プログラム。
【請求項1】
無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、
前記各受信アンテナが前記無線送信源から無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算する計測部と、
を備えたことを特徴とする送信位置検出装置。
【請求項2】
前記無線送信源から無線送信された信号を受信した前記受信アンテナから出力される信号を入力し、この入力された信号に応じて前記計測部の時間計測開始を制御する制御部、
をさらに具備したことを特徴とする請求項1に記載の送信位置検出装置。
【請求項3】
前記制御部は、前記受信アンテナから入力される信号が、RFIDタグのデータを読み取るRFID読取装置の送信データに含まれるQuery信号のとき、前記計測部の時間計測開始を制御することを特徴とする請求項2に記載の送信位置検出装置。
【請求項4】
前記制御部は、前記受信アンテナから入力される信号が、RFIDタグからRFID読取装置に対して送信される前記RFIDタグ固有の識別情報を含むデータのプリアンブル信号のとき、前記計測部の時間計測開始を制御することを特徴とする請求項2に記載の送信位置検出装置。
【請求項5】
前記計測部は、RFIDタグのデータを読み取るRFID読取装置が変調した信号の受信時に前記各受信アンテナ間の時間差を計測することを特徴とする請求項1記載の送信位置検出装置。
【請求項6】
前記計測部は、RFIDタグからRFID読取装置に送信される前記RFIDタグ固有の識別情報を含む信号の受信時に前記各受信アンテナ間の時間差を計測し、各時間差から演算された三次元座標とこの三次元座標の演算に用いられた各時間差の計測時に受信した識別情報またはこの識別情報に基づいて特定される情報とを関連付けて出力することを特徴とする請求項1に記載の送信位置検出装置。
【請求項7】
4つの前記受信アンテナを同一平面上に配置するとき、各アンテナを頂点とする四角形の形状が、向かい合った各の和が180度にならないで、かつ、2つの対角線の中心が同じ点とならないように配置することを特徴とする請求項1に記載の送信位置検出装置。
【請求項8】
無線送信源から無線送信された信号を、4つ以上の受信アンテナで受信し、
計測部が、前記無線送信源から無線送信された信号を前記各受信アンテナが受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算することを特徴とする送信位置検出方法。
【請求項9】
固有の識別情報を記憶するRFIDタグと無線通信を行って前記RFIDタグから前記識別情報を読取るRFID読取装置と前記無線通信以外の通信方式で通信を行うサーバと、
前記RFID読取装置と前記RFIDタグとの無線通信を4つ以上の受信アンテナで受信し、前記各受信アンテナが前記RFID読取装置または前記RFIDタグから無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて前記RFID読取装置と前記RFIDタグのそれぞれの位置を示す三次元座標を演算し、演算した結果を前記サーバに送信する送信位置検出装置と、
を備えたことを特徴とする送信位置検出システム。
【請求項10】
前記サーバは、前記RFID読取装置から前記RFIDタグの読取を行うための送信設定情報を受信すると、この送信設定情報を前記送信位置検出装置に転送し、
前記送信位置検出装置は、前記サーバから前記送信設定情報を受信すると、この送信設定情報に基づいて前記RFIDタグからの電波を受信できるように受信状態を設定することを特徴とする請求項9に記載の送信位置検出システム。
【請求項11】
前記送信位置検出装置は、演算した結果として前記RFID読取装置及び前記RFIDタグの三次元座標とともに前記RFIDタグの識別情報を前記サーバに送信し、
前記サーバは、前記RFID読取装置が読み取った前記RFIDタグの識別情報を前記RFID読取装置から取り込んで、前記RFID読取装置から取り込んだ前記RFIDタグの識別情報と前記送信位置検出装置から受信した前記RFIDタグの識別情報とが一致するとき、前記RFID読取装置のアドレスに関連付けて当該RFID読取装置の座標と、当該RFID読取装置が読み取った前記RFIDタグの座標とを記憶することを特徴とする請求項9に記載の送信位置検出システム。
【請求項12】
前記サーバは、前記RFID読取装置のアドレスに関連付けて記憶した当該RFID読取装置の座標と、当該RFID読取装置が読み取った前記RFIDタグの座標とを、前記アドレスで特定されるRFID読取装置に送信することを特徴とする請求項11に記載の送信位置検出システム。
【請求項13】
無線送信源から無線送信された信号を受信するための4つ以上の受信アンテナを配置した筐体を有したコンピュータに、
前記各受信アンテナが前記無線送信源から無線送信された信号を受信したときの前記各受信アンテナ間の時間差を計測する計測機能と、
この計測機能によって計測された各時間差に基づいて前記無線送信源の位置を示す三次元座標を演算する演算機能と、
を実現させるための送信位置検出プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−19811(P2013−19811A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−154239(P2011−154239)
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
[ Back to top ]