
送信機支持スタンド及び超音波診断装置
【課題】送信機の高さ調整に係る操作性を向上させることができる送信機支持スタンド及び超音波診断装置を提供すること。
【解決手段】実施の形態の送信機支持スタンドは、支持部と、支柱と、ロックピンとを備える。支持部は、超音波プローブの位置検出に用いられる磁気送信機を支持し、貫通孔が設けられる。支柱は、複数の係合凹部が長手方向に連続して形成され、支持部を所定の高さで保持する。ロックピンは、貫通孔内を移動して複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を係合凹部の方向に押し付けて、係合凸部を係合凹部に係合させるバネとを有する。
【解決手段】実施の形態の送信機支持スタンドは、支持部と、支柱と、ロックピンとを備える。支持部は、超音波プローブの位置検出に用いられる磁気送信機を支持し、貫通孔が設けられる。支柱は、複数の係合凹部が長手方向に連続して形成され、支持部を所定の高さで保持する。ロックピンは、貫通孔内を移動して複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を係合凹部の方向に押し付けて、係合凸部を係合凹部に係合させるバネとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施の形態は、送信機支持スタンド及び超音波診断装置に関する。
【背景技術】
【0002】
従来、超音波診断装置を用いた検査において、X線CT(Computed Tomography)装置やMRI(Magnetic Resonance Imaging)装置などの他の医用画像診断装置によって撮像された画像と超音波画像とを比較することで、診断精度を向上させる技術が知られている。このような技術では、CT画像やMR画像などの断層面と超音波画像の断層面との位置を合わせるために、磁気センサーなどが用いられる。
【0003】
例えば、磁気センサーを用いて位置合わせが行われる場合には、磁場を発生させる磁気送信機を支持したポールスタンドがベッドの近傍に配置され、超音波プローブに磁気センサーが取り付けられる。磁気送信機は、X軸、Y軸、Z軸方向に磁場を発生させる。そして、超音波プローブに取り付けられた磁気センサーが、各軸方向の位置とそれぞれの軸に対する回転角度を検出することで、超音波プローブの位置及び角度を検出する。
【0004】
ここで、上述したようにポールスタンドによって磁気送信機が支持される場合には、最適な位置に磁場を形成させるために、磁気送信機を支持する支持部を上下に移動させることで、磁気送信機の高さが調整される。しかしながら、上述した従来技術においては、送信機の高さ調整に係る操作性が低下する場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−005168号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、送信機の高さ調整に係る操作性を向上させることができる送信機支持スタンド及び超音波診断装置を提供することである。
【課題を解決するための手段】
【0007】
実施の形態の送信機支持スタンドは、支持部と、支柱部と、位置固定部とを備える。支持部は、超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられる。支柱部は、複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持する。位置固定部は、前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する。
【図面の簡単な説明】
【0008】
【図1】図1は、第1の実施形態に係るポールスタンドの外観を示す斜視図である。
【図2】図2は、従来技術に係る課題を説明するための図である。
【図3】図3は、第1の実施形態に係るポールスタンドにおける支持部付近の拡大図である。
【図4】図4は、第1の実施形態に係るロックピンを説明するための図である。
【図5】図5は、第1の実施形態に係るロックピンによる支持部の高さ位置の固定を説明するための断面図である。
【図6】図6は、第1の実施形態に係るツマミネジを説明するための図である。
【図7】図7は、第1の実施形態に係るツマミネジによる支持部の支柱への固定を説明するための断面図である。
【図8】図8は、第2の実施形態に係る超音波診断装置の全体構成を示す斜視図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
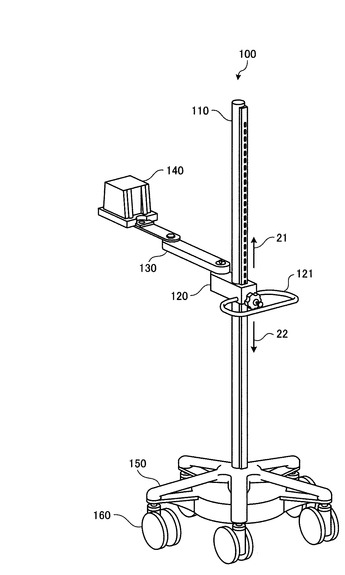
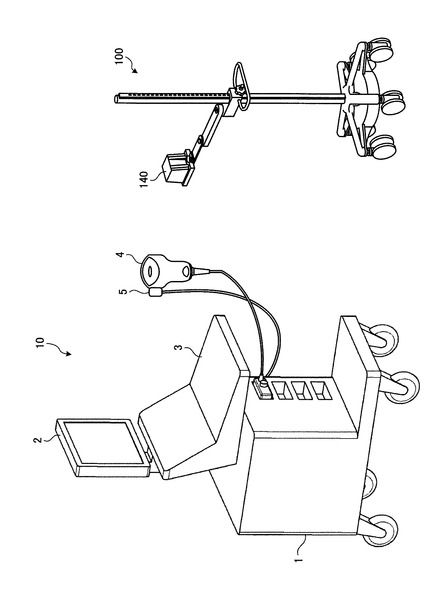
まず、第1の実施形態に係る送信機支持スタンドの全体構成について説明する。なお、第1の実施形態においては、磁気送信機を支持するポールスタンドを例に挙げて説明する。図1は、第1の実施形態に係るポールスタンド100の外観を示す斜視図である。図1に示すように、第1の実施形態に係るポールスタンド100は、支柱110と、支持部120と、グリップ121と、アーム部130と、磁気送信機140と、脚部150と、キャスター160とを備える。
【0010】
支柱110は、支持部120を所定の高さで保持する。支持部120は、超音波プローブの位置検出に用いられる送信機を支持する。具体的には、支持部120は、磁気送信機140を保持するアーム部130を所定の高さで保持する。アーム部130は、磁気送信機を支持し、支柱110の長手方向に対して垂直な方向に磁気送信機140を移動させる。磁気送信機140は、超音波プローブの位置を検出するための磁場を発生させる。脚部150は、支柱110を支持する。キャスター160は、任意の方向に回転し、ポールスタンド100を任意の方向に移動させる。
【0011】
そして、ポールスタンド100においては、支持部120が、図1の矢印21又は矢印22の方向に移動されることで、磁気送信機140の高さが調整される。第1の実施形態に係るポールスタンド100は、この送信機の高さ調整に係る操作性を向上させることを可能にする。ここで、従来技術において、送信機の高さ調整に係る操作性が低下する場合について、図2を用いて説明する。
【0012】
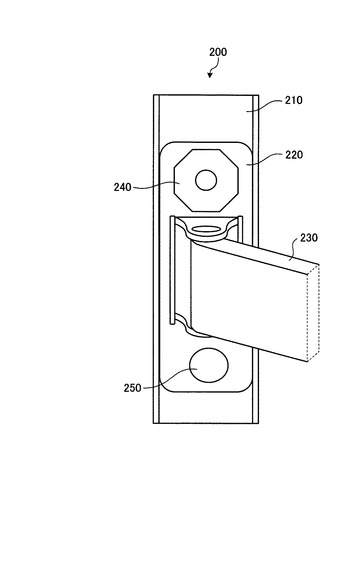
図2は、従来技術に係る課題を説明するための図である。図2においては、従来技術に係るポールスタンドの支持部領域を拡大した図を示す。図2に示すように、従来技術に係るポールスタンド200は、支柱210と、支持部220と、アーム部230と、ツマミネジ240と、与圧付加部250とを備える。図2に示すポールスタンド200においては、支柱210に設けられた溝を支持部220が上下にスライドすることで、アーム部230に指示された磁気送信機(図示せず)の高さを調整する。
【0013】
ここで、ポールスタンド200においては、ツマミネジ240によって磁気送信機の高さ位置が所望の高さで固定される。具体的には、操作者は、ツマミネジ240を緩めた状態で支持部220を上下に移動させて磁気送信機の高さ位置を決定する。そして、操作者は、ツマミネジ240を締め、ツマミネジ240の先端と支柱210との摩擦により、支持部220を支柱210に固定する。すなわち、磁気送信機が操作者の所望する高さ位置で固定される。
【0014】
ここで、上述したツマミネジによる摩擦固定においては、ツマミネジ240を誤って緩めると、重量のある磁気送信機が患者や、操作者に意図せず落下してしまう場合があった。そのため、従来技術においては、ツマミネジ240を誤って緩めても磁気送信機が落下しないように、与圧付加部250により支柱に対して与圧が加えられる。
【0015】
しかしながら、上述した従来技術では、与圧付加部250によって常に一定の摩擦力が生じていることから、スムーズな上昇・下降操作を阻害してしまい、送信機の高さ調整に係る操作性が低下する。そこで、本願は、以下、詳細に説明する構成により送信機の高さ調整に係る操作性を向上させる。
【0016】
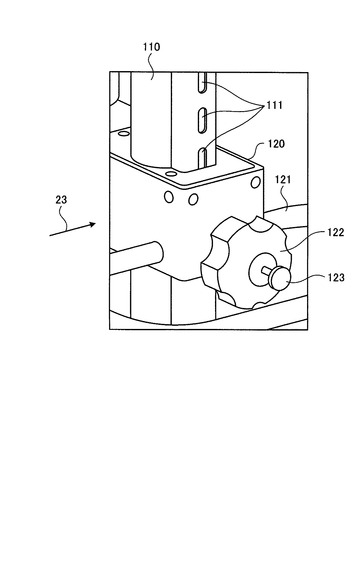
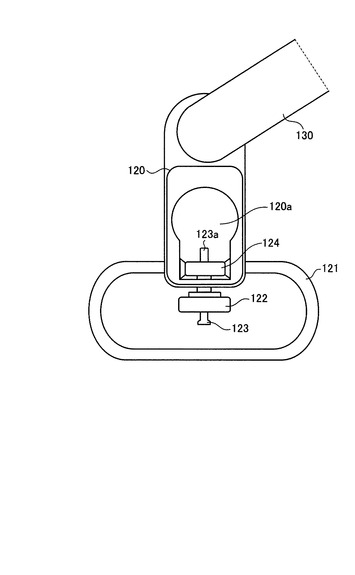
図3は、第1の実施形態に係るポールスタンド100における支持部120付近の拡大図である。第1の実施形態に係るポールスタンド100は、送信機の高さ調整に係る操作性を向上させるために、図3に示すように、係合凹部111と、ツマミネジ122と、ロックピン123とを備える。
【0017】
係合凹部111は、図3に示すように、支柱110の長手方向に連続して複数形成される。なお、係合凹部111のサイズ、配置間隔及び支柱110における配置範囲は、設計者により任意に設計することが可能である。ここで、支持部120は、図3に示すように、ツマミネジ122と、ロックピン123とが差し込まれる貫通孔を備える。
【0018】
ロックピン123は、貫通孔内を移動して複数の係合凹部111のいずれかに係合される係合凸部と、当該係合凸部を係合凹部111の方向に押し付けて、係合凸部を係合凹部111に係合させる弾性体とを有する。図4は、第1の実施形態に係るロックピン123を説明するための図である。図4においては、図1に示すポールスタンド100において、支柱110から取り外した支持部120の上面図を示す。
【0019】
図4に示すように、ロックピン123は、係合凹部111に係合する係合凸部123aを有し、支持部120に設けられた貫通孔を介して支持部120の内部120aに差し込まれる。ここで、内部120aは、支柱110が差し込まれる領域である。すなわち、ロックピン123は、支持部120に差し込まれた支柱110の方向に係合凸部123a側から差し込まれる。なお、支持部120の内部120aにはローラー124が設けられる。ローラー124は、支柱110の表面上で回転することで、支持部120の上昇・下降操作をスムーズに行わせる。
【0020】
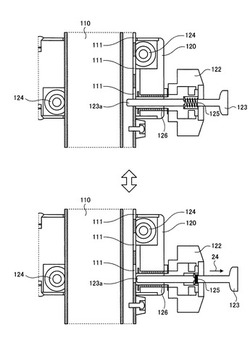
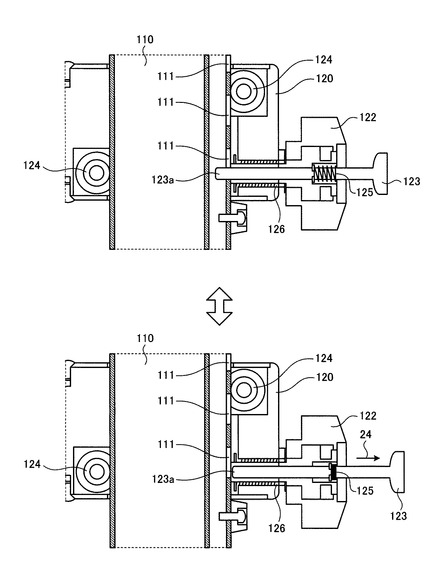
図5は、第1の実施形態に係るロックピン123による支持部120の高さ位置の固定を説明するための断面図である。図5においては、支持部120の垂直方向の断面を、図3の矢印23の方向から見た場合の図を示す。図5の上側の図に示すように、ロックピン123は、支持部120に設けられた貫通孔126を介して支柱110の方向に差し込まれる。ここで、ロックピン123には、図5に示すように、バネ125(弾性体)が備えられる。
【0021】
バネ125は、係合凸部123aを係合凹部111の方向に押し付けて、係合凸部123aを係合凹部111に係合させる。例えば、図5の上側の図に示すように、バネ125は、ロックピン123が内部に差し込まれ、所定の位置で固定される。ここで、バネ125は、当該バネ125の復元力によりロックピン123の係合凸部123aを係合凹部111に係合させるように固定される。上述したように、バネ125の復元力で係合凸部123aが係合凹部111に係合されることによって、支持部120の高さ位置、すなわち、支持部120に支持された磁気送信機140の高さ位置が自動で固定されることとなる。
【0022】
そして、例えば、操作者が、図5の下側の図の矢印24の方向にロックピン123を引くと、バネ125は収縮し、それに伴って、係合凸部123aと係合凹部111との係合がはずれ、支持部120は、上昇・下降操作が可能になる。言うまでもなく、ロックピン123を引く操作をやめた場合には、バネ125の復元力により、係合凸部123aが係合凹部111側に押し出され、複数の係合凹部111のいずれかと係合することとなる。
【0023】
従って、操作者は、手前(図5の矢印24の方向)にロックピン123を引き、所望する高さでロックピン123から手を離すことで、自動で高さ位置が固定されることとなる。なお、ロックピン123がバネ125の内部に差し込まれる場合について説明したが、実施形態はこれに限定されるものではなく、複数のバネをロックピン123の周方向に配置し、それらのバネをロックピン123に固定する場合であってもよい。また、係合凸部123aの直径は、任意に設計することができ、例えば、係合凹部111の短手方向の幅よりも短かければどのようなサイズであってもよい。
【0024】
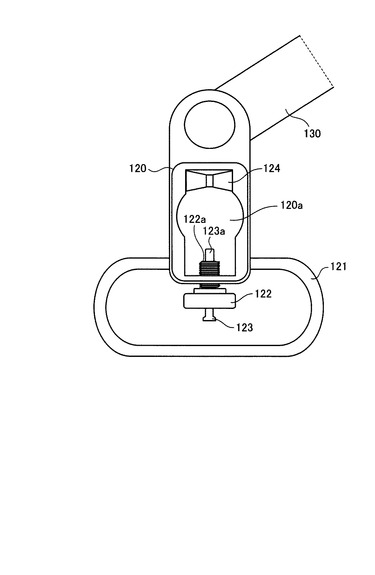
図3に戻って、ツマミネジ122は、ロックピン123と係合凹部111とが係合した状態で支持部120を支柱110に固定する。ここで、ツマミネジ122は、ロックピン123の近接に配置されることが好ましい。第1の実施形態では、ツマミネジ122とロックピン123とが一体化された場合について説明する。
【0025】
図6は、第1の実施形態に係るツマミネジ122を説明するための図である。図6においては、図1に示すポールスタンド100において、支柱110から取り外した支持部120の下面図を示す。図6に示すように、第1の実施形態に係るツマミネジ122は、ロックピン123と同軸に配置され、支持部120に設けられた貫通孔にネジ部122aがねじ込まれる。ここで、ツマミネジ122は、ネジ部122aの先端が支柱110に接する位置までねじ込み可能となるように設計される。また、ツマミネジ122は、ネジ部122aの回転軸方向にロックピン123が挿入される貫通孔を備える。
【0026】
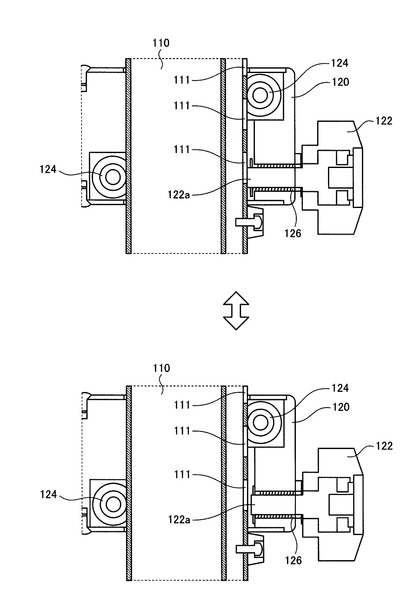
図7は、第1の実施形態に係るツマミネジ122による支持部120の支柱110への固定を説明するための断面図である。図7においては、支持部120の垂直方向の断面を、図3の矢印23の方向から見た場合の図を示す。なお、図7においては、ツマミネジ122と支柱110との接触について示すため、ロックピン123を図示していないが、実際には、ロックピン123がツマミネジ122の回転軸方向に設けられた貫通孔を介して支柱110の方向に差し込まれている。
【0027】
図7の上側の図に示すように、ツマミネジ122は、支持部120に設けられた貫通孔126を介して支柱110の方向にねじ込まれる。ここで、ツマミネジ122のネジ部122aの直径は、係合凹部111の短手方向の幅よりも大きくなるように設計される。これにより、図7の上側の図に示すように、ネジ部122aが支柱110に接する位置までねじ込まれた場合、ネジ部122aの先端は係合凹部111と係合することなく支柱110の側面と接することとなる。その結果、支柱110の側面と、ネジ部122aの先端との間に摩擦が生じることとなり、ツマミネジ122は、支持部120を支柱110に固定することができる。
【0028】
例えば、操作者は、磁気送信機140の高さ位置を調整する際に、まず、ロックピン123の係合凸部123aを係合凹部111に係合させたのち、ツマミネジ122を回転させて支持部120を支柱110に固定する。再度、磁気送信機140の高さ位置を調整する場合には、操作者は、ツマミネジ122を緩める方向に回転させることで、図7の下側の図に示すように、ネジ部122aの先端を支柱110から離間させたのち、ロックピン123を手前に引き、支持部120を上下に移動させて磁気送信機を所望の高さ位置に調整する。
【0029】
上述したように、第1の実施形態によれば、支持部120は、超音波プローブの位置検出に用いられる磁気送信機140を支持し、貫通孔126が設けられる。支柱110は、複数の係合凹部111が長手方向に連続して形成され、支持部120を所定の高さで保持する。ロックピン123は、貫通孔126内を移動して複数の係合凹部111のいずれかに係合される係合凸部123aと、当該係合凸部123aを係合凹部111の方向に押し付けて、係合凸部123aを係合凹部111に係合させるバネ125とを有する。従って、第1の実施形態に係るポールスタンド100は、送信機の高さ調整に係る操作性を向上させることを可能にする。
【0030】
例えば、操作者は、グリップ121を片手でもち、ロックピン123を指で引き、磁気送信機140を所望の高さに合わせたのち、ロックピン123を離すという簡単な操作で磁気送信機140の高さ位置を調整することができる。
【0031】
また、第1の実施形態によれば、ツマミネジ122は、ロックピン123と係合凹部111とが係合した状態で支持部120を支柱110に固定する。従って、第1の実施形態に係るポールスタンド100は、支持部120のガタツキを抑止し、磁気送信機の上下左右のわずかな動きも抑止することを可能にする。
【0032】
また、第1の実施形態によれば、ツマミネジ122は、ロックピン123に近接する位置に配置される。従って、第1の実施形態に係るポールスタンド100は、支持部120をより小さくすることができ、送信機の高さ調整に係る操作性をより向上させることを可能にする。
【0033】
また、第1の実施形態によれば、ツマミネジ122とロックピン123とを一体化させる。従って、第1の実施形態に係るポールスタンド100は、磁気送信機140の高さ位置の調整及び固定を片手で行うことができ、送信機の高さ調整に係る操作性をさらに向上させることを可能にする。
【0034】
(第2の実施形態)
第2の実施形態では、第1の実施形態で説明したポールスタンド100を備えた超音波診断装置について説明する。図8は、第2の実施形態に係る超音波診断装置10の全体構成を示す斜視図である。図1に示すように、第2の実施形態に係る超音波診断装置10は、装置本体1と、モニタ2と、操作部3と、超音波プローブ4と、位置センサー5と、磁気送信機140を支持するポールスタンド100とを備える。
【0035】
装置本体1は、超音波診断装置10の全体制御を行う。例えば、装置本体1は、CT画像やMR画像と超音波画像との位置合わせや、超音波画像の生成に係る各種制御を実行する。モニタ2は、超音波診断装置10の操作者が操作部3を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体1において生成された超音波画像などを表示したりする。
【0036】
操作部3は、トラックボール、スイッチ、ボタン、タッチコマンドスクリーンなどを有し、超音波診断装置10の操作者からの各種設定要求を受け付け、装置本体1に対して受け付けた各種設定要求を転送する。超音波プローブ4は、超音波を送受信する。位置センサー5は、図8に示すように、超音波プローブ4に取り付けられ、磁気送信機140によって発生された磁界における超音波プローブ4の位置を検出する。
【0037】
(第3の実施形態)
さて、これまで第1及び第2の実施形態について説明したが、上述した第1及び第2の実施形態以外にも、種々の異なる形態にて実施されてよいものである。
【0038】
上述した第1及び第2の実施形態では、位置固定部として棒状のロックピンを用いる場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、係合凸部の太さと、その他の部位の太さとが異なる部材を位置固定部として用いる場合であってもよい。
【0039】
また、上述した第1及び第2の実施形態では、ロックピンとツマミネジとが一体型である場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、ロックピンとツマミネジとが離れた位置に配置される場合であってもよい。
【0040】
また、上述した第1及び第2実施形態では、送信機として磁気送信機を用いる場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、赤外線送信機などを用いる場合であってもよい。
【0041】
以上説明したとおり、実施形態によれば、本実施形態の送信機支持スタンド及び超音波診断装置は、送信機の高さ調整に係る操作性を向上させることを可能にする。
【0042】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0043】
1 装置本体
4 超音波プローブ
10 超音波診断装置
100 ポールスタンド
110 支柱
111 係合凹部
120 支持部
122 ツマミネジ
123 ロックピン
123a 係合凸部
140 磁気送信機
【技術分野】
【0001】
本発明の実施の形態は、送信機支持スタンド及び超音波診断装置に関する。
【背景技術】
【0002】
従来、超音波診断装置を用いた検査において、X線CT(Computed Tomography)装置やMRI(Magnetic Resonance Imaging)装置などの他の医用画像診断装置によって撮像された画像と超音波画像とを比較することで、診断精度を向上させる技術が知られている。このような技術では、CT画像やMR画像などの断層面と超音波画像の断層面との位置を合わせるために、磁気センサーなどが用いられる。
【0003】
例えば、磁気センサーを用いて位置合わせが行われる場合には、磁場を発生させる磁気送信機を支持したポールスタンドがベッドの近傍に配置され、超音波プローブに磁気センサーが取り付けられる。磁気送信機は、X軸、Y軸、Z軸方向に磁場を発生させる。そして、超音波プローブに取り付けられた磁気センサーが、各軸方向の位置とそれぞれの軸に対する回転角度を検出することで、超音波プローブの位置及び角度を検出する。
【0004】
ここで、上述したようにポールスタンドによって磁気送信機が支持される場合には、最適な位置に磁場を形成させるために、磁気送信機を支持する支持部を上下に移動させることで、磁気送信機の高さが調整される。しかしながら、上述した従来技術においては、送信機の高さ調整に係る操作性が低下する場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−005168号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、送信機の高さ調整に係る操作性を向上させることができる送信機支持スタンド及び超音波診断装置を提供することである。
【課題を解決するための手段】
【0007】
実施の形態の送信機支持スタンドは、支持部と、支柱部と、位置固定部とを備える。支持部は、超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられる。支柱部は、複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持する。位置固定部は、前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する。
【図面の簡単な説明】
【0008】
【図1】図1は、第1の実施形態に係るポールスタンドの外観を示す斜視図である。
【図2】図2は、従来技術に係る課題を説明するための図である。
【図3】図3は、第1の実施形態に係るポールスタンドにおける支持部付近の拡大図である。
【図4】図4は、第1の実施形態に係るロックピンを説明するための図である。
【図5】図5は、第1の実施形態に係るロックピンによる支持部の高さ位置の固定を説明するための断面図である。
【図6】図6は、第1の実施形態に係るツマミネジを説明するための図である。
【図7】図7は、第1の実施形態に係るツマミネジによる支持部の支柱への固定を説明するための断面図である。
【図8】図8は、第2の実施形態に係る超音波診断装置の全体構成を示す斜視図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
まず、第1の実施形態に係る送信機支持スタンドの全体構成について説明する。なお、第1の実施形態においては、磁気送信機を支持するポールスタンドを例に挙げて説明する。図1は、第1の実施形態に係るポールスタンド100の外観を示す斜視図である。図1に示すように、第1の実施形態に係るポールスタンド100は、支柱110と、支持部120と、グリップ121と、アーム部130と、磁気送信機140と、脚部150と、キャスター160とを備える。
【0010】
支柱110は、支持部120を所定の高さで保持する。支持部120は、超音波プローブの位置検出に用いられる送信機を支持する。具体的には、支持部120は、磁気送信機140を保持するアーム部130を所定の高さで保持する。アーム部130は、磁気送信機を支持し、支柱110の長手方向に対して垂直な方向に磁気送信機140を移動させる。磁気送信機140は、超音波プローブの位置を検出するための磁場を発生させる。脚部150は、支柱110を支持する。キャスター160は、任意の方向に回転し、ポールスタンド100を任意の方向に移動させる。
【0011】
そして、ポールスタンド100においては、支持部120が、図1の矢印21又は矢印22の方向に移動されることで、磁気送信機140の高さが調整される。第1の実施形態に係るポールスタンド100は、この送信機の高さ調整に係る操作性を向上させることを可能にする。ここで、従来技術において、送信機の高さ調整に係る操作性が低下する場合について、図2を用いて説明する。
【0012】
図2は、従来技術に係る課題を説明するための図である。図2においては、従来技術に係るポールスタンドの支持部領域を拡大した図を示す。図2に示すように、従来技術に係るポールスタンド200は、支柱210と、支持部220と、アーム部230と、ツマミネジ240と、与圧付加部250とを備える。図2に示すポールスタンド200においては、支柱210に設けられた溝を支持部220が上下にスライドすることで、アーム部230に指示された磁気送信機(図示せず)の高さを調整する。
【0013】
ここで、ポールスタンド200においては、ツマミネジ240によって磁気送信機の高さ位置が所望の高さで固定される。具体的には、操作者は、ツマミネジ240を緩めた状態で支持部220を上下に移動させて磁気送信機の高さ位置を決定する。そして、操作者は、ツマミネジ240を締め、ツマミネジ240の先端と支柱210との摩擦により、支持部220を支柱210に固定する。すなわち、磁気送信機が操作者の所望する高さ位置で固定される。
【0014】
ここで、上述したツマミネジによる摩擦固定においては、ツマミネジ240を誤って緩めると、重量のある磁気送信機が患者や、操作者に意図せず落下してしまう場合があった。そのため、従来技術においては、ツマミネジ240を誤って緩めても磁気送信機が落下しないように、与圧付加部250により支柱に対して与圧が加えられる。
【0015】
しかしながら、上述した従来技術では、与圧付加部250によって常に一定の摩擦力が生じていることから、スムーズな上昇・下降操作を阻害してしまい、送信機の高さ調整に係る操作性が低下する。そこで、本願は、以下、詳細に説明する構成により送信機の高さ調整に係る操作性を向上させる。
【0016】
図3は、第1の実施形態に係るポールスタンド100における支持部120付近の拡大図である。第1の実施形態に係るポールスタンド100は、送信機の高さ調整に係る操作性を向上させるために、図3に示すように、係合凹部111と、ツマミネジ122と、ロックピン123とを備える。
【0017】
係合凹部111は、図3に示すように、支柱110の長手方向に連続して複数形成される。なお、係合凹部111のサイズ、配置間隔及び支柱110における配置範囲は、設計者により任意に設計することが可能である。ここで、支持部120は、図3に示すように、ツマミネジ122と、ロックピン123とが差し込まれる貫通孔を備える。
【0018】
ロックピン123は、貫通孔内を移動して複数の係合凹部111のいずれかに係合される係合凸部と、当該係合凸部を係合凹部111の方向に押し付けて、係合凸部を係合凹部111に係合させる弾性体とを有する。図4は、第1の実施形態に係るロックピン123を説明するための図である。図4においては、図1に示すポールスタンド100において、支柱110から取り外した支持部120の上面図を示す。
【0019】
図4に示すように、ロックピン123は、係合凹部111に係合する係合凸部123aを有し、支持部120に設けられた貫通孔を介して支持部120の内部120aに差し込まれる。ここで、内部120aは、支柱110が差し込まれる領域である。すなわち、ロックピン123は、支持部120に差し込まれた支柱110の方向に係合凸部123a側から差し込まれる。なお、支持部120の内部120aにはローラー124が設けられる。ローラー124は、支柱110の表面上で回転することで、支持部120の上昇・下降操作をスムーズに行わせる。
【0020】
図5は、第1の実施形態に係るロックピン123による支持部120の高さ位置の固定を説明するための断面図である。図5においては、支持部120の垂直方向の断面を、図3の矢印23の方向から見た場合の図を示す。図5の上側の図に示すように、ロックピン123は、支持部120に設けられた貫通孔126を介して支柱110の方向に差し込まれる。ここで、ロックピン123には、図5に示すように、バネ125(弾性体)が備えられる。
【0021】
バネ125は、係合凸部123aを係合凹部111の方向に押し付けて、係合凸部123aを係合凹部111に係合させる。例えば、図5の上側の図に示すように、バネ125は、ロックピン123が内部に差し込まれ、所定の位置で固定される。ここで、バネ125は、当該バネ125の復元力によりロックピン123の係合凸部123aを係合凹部111に係合させるように固定される。上述したように、バネ125の復元力で係合凸部123aが係合凹部111に係合されることによって、支持部120の高さ位置、すなわち、支持部120に支持された磁気送信機140の高さ位置が自動で固定されることとなる。
【0022】
そして、例えば、操作者が、図5の下側の図の矢印24の方向にロックピン123を引くと、バネ125は収縮し、それに伴って、係合凸部123aと係合凹部111との係合がはずれ、支持部120は、上昇・下降操作が可能になる。言うまでもなく、ロックピン123を引く操作をやめた場合には、バネ125の復元力により、係合凸部123aが係合凹部111側に押し出され、複数の係合凹部111のいずれかと係合することとなる。
【0023】
従って、操作者は、手前(図5の矢印24の方向)にロックピン123を引き、所望する高さでロックピン123から手を離すことで、自動で高さ位置が固定されることとなる。なお、ロックピン123がバネ125の内部に差し込まれる場合について説明したが、実施形態はこれに限定されるものではなく、複数のバネをロックピン123の周方向に配置し、それらのバネをロックピン123に固定する場合であってもよい。また、係合凸部123aの直径は、任意に設計することができ、例えば、係合凹部111の短手方向の幅よりも短かければどのようなサイズであってもよい。
【0024】
図3に戻って、ツマミネジ122は、ロックピン123と係合凹部111とが係合した状態で支持部120を支柱110に固定する。ここで、ツマミネジ122は、ロックピン123の近接に配置されることが好ましい。第1の実施形態では、ツマミネジ122とロックピン123とが一体化された場合について説明する。
【0025】
図6は、第1の実施形態に係るツマミネジ122を説明するための図である。図6においては、図1に示すポールスタンド100において、支柱110から取り外した支持部120の下面図を示す。図6に示すように、第1の実施形態に係るツマミネジ122は、ロックピン123と同軸に配置され、支持部120に設けられた貫通孔にネジ部122aがねじ込まれる。ここで、ツマミネジ122は、ネジ部122aの先端が支柱110に接する位置までねじ込み可能となるように設計される。また、ツマミネジ122は、ネジ部122aの回転軸方向にロックピン123が挿入される貫通孔を備える。
【0026】
図7は、第1の実施形態に係るツマミネジ122による支持部120の支柱110への固定を説明するための断面図である。図7においては、支持部120の垂直方向の断面を、図3の矢印23の方向から見た場合の図を示す。なお、図7においては、ツマミネジ122と支柱110との接触について示すため、ロックピン123を図示していないが、実際には、ロックピン123がツマミネジ122の回転軸方向に設けられた貫通孔を介して支柱110の方向に差し込まれている。
【0027】
図7の上側の図に示すように、ツマミネジ122は、支持部120に設けられた貫通孔126を介して支柱110の方向にねじ込まれる。ここで、ツマミネジ122のネジ部122aの直径は、係合凹部111の短手方向の幅よりも大きくなるように設計される。これにより、図7の上側の図に示すように、ネジ部122aが支柱110に接する位置までねじ込まれた場合、ネジ部122aの先端は係合凹部111と係合することなく支柱110の側面と接することとなる。その結果、支柱110の側面と、ネジ部122aの先端との間に摩擦が生じることとなり、ツマミネジ122は、支持部120を支柱110に固定することができる。
【0028】
例えば、操作者は、磁気送信機140の高さ位置を調整する際に、まず、ロックピン123の係合凸部123aを係合凹部111に係合させたのち、ツマミネジ122を回転させて支持部120を支柱110に固定する。再度、磁気送信機140の高さ位置を調整する場合には、操作者は、ツマミネジ122を緩める方向に回転させることで、図7の下側の図に示すように、ネジ部122aの先端を支柱110から離間させたのち、ロックピン123を手前に引き、支持部120を上下に移動させて磁気送信機を所望の高さ位置に調整する。
【0029】
上述したように、第1の実施形態によれば、支持部120は、超音波プローブの位置検出に用いられる磁気送信機140を支持し、貫通孔126が設けられる。支柱110は、複数の係合凹部111が長手方向に連続して形成され、支持部120を所定の高さで保持する。ロックピン123は、貫通孔126内を移動して複数の係合凹部111のいずれかに係合される係合凸部123aと、当該係合凸部123aを係合凹部111の方向に押し付けて、係合凸部123aを係合凹部111に係合させるバネ125とを有する。従って、第1の実施形態に係るポールスタンド100は、送信機の高さ調整に係る操作性を向上させることを可能にする。
【0030】
例えば、操作者は、グリップ121を片手でもち、ロックピン123を指で引き、磁気送信機140を所望の高さに合わせたのち、ロックピン123を離すという簡単な操作で磁気送信機140の高さ位置を調整することができる。
【0031】
また、第1の実施形態によれば、ツマミネジ122は、ロックピン123と係合凹部111とが係合した状態で支持部120を支柱110に固定する。従って、第1の実施形態に係るポールスタンド100は、支持部120のガタツキを抑止し、磁気送信機の上下左右のわずかな動きも抑止することを可能にする。
【0032】
また、第1の実施形態によれば、ツマミネジ122は、ロックピン123に近接する位置に配置される。従って、第1の実施形態に係るポールスタンド100は、支持部120をより小さくすることができ、送信機の高さ調整に係る操作性をより向上させることを可能にする。
【0033】
また、第1の実施形態によれば、ツマミネジ122とロックピン123とを一体化させる。従って、第1の実施形態に係るポールスタンド100は、磁気送信機140の高さ位置の調整及び固定を片手で行うことができ、送信機の高さ調整に係る操作性をさらに向上させることを可能にする。
【0034】
(第2の実施形態)
第2の実施形態では、第1の実施形態で説明したポールスタンド100を備えた超音波診断装置について説明する。図8は、第2の実施形態に係る超音波診断装置10の全体構成を示す斜視図である。図1に示すように、第2の実施形態に係る超音波診断装置10は、装置本体1と、モニタ2と、操作部3と、超音波プローブ4と、位置センサー5と、磁気送信機140を支持するポールスタンド100とを備える。
【0035】
装置本体1は、超音波診断装置10の全体制御を行う。例えば、装置本体1は、CT画像やMR画像と超音波画像との位置合わせや、超音波画像の生成に係る各種制御を実行する。モニタ2は、超音波診断装置10の操作者が操作部3を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体1において生成された超音波画像などを表示したりする。
【0036】
操作部3は、トラックボール、スイッチ、ボタン、タッチコマンドスクリーンなどを有し、超音波診断装置10の操作者からの各種設定要求を受け付け、装置本体1に対して受け付けた各種設定要求を転送する。超音波プローブ4は、超音波を送受信する。位置センサー5は、図8に示すように、超音波プローブ4に取り付けられ、磁気送信機140によって発生された磁界における超音波プローブ4の位置を検出する。
【0037】
(第3の実施形態)
さて、これまで第1及び第2の実施形態について説明したが、上述した第1及び第2の実施形態以外にも、種々の異なる形態にて実施されてよいものである。
【0038】
上述した第1及び第2の実施形態では、位置固定部として棒状のロックピンを用いる場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、係合凸部の太さと、その他の部位の太さとが異なる部材を位置固定部として用いる場合であってもよい。
【0039】
また、上述した第1及び第2の実施形態では、ロックピンとツマミネジとが一体型である場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、ロックピンとツマミネジとが離れた位置に配置される場合であってもよい。
【0040】
また、上述した第1及び第2実施形態では、送信機として磁気送信機を用いる場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、赤外線送信機などを用いる場合であってもよい。
【0041】
以上説明したとおり、実施形態によれば、本実施形態の送信機支持スタンド及び超音波診断装置は、送信機の高さ調整に係る操作性を向上させることを可能にする。
【0042】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0043】
1 装置本体
4 超音波プローブ
10 超音波診断装置
100 ポールスタンド
110 支柱
111 係合凹部
120 支持部
122 ツマミネジ
123 ロックピン
123a 係合凸部
140 磁気送信機
【特許請求の範囲】
【請求項1】
超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられた支持部と、
複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持するための支柱部と、
前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する位置固定部と、
を備えたことを特徴とする送信機支持スタンド。
【請求項2】
前記位置固定部と前記係合凹部とが係合した状態で前記支持部を前記支柱部に固定する固定機構をさらに備えたことを特徴とする請求項1に記載の送信機支持スタンド。
【請求項3】
前記固定機構が前記位置固定部の近接に配置されたことを特徴とする請求項2に記載の送信機支持スタンド。
【請求項4】
前記固定機構と前記位置固定部とが一体化されたことを特徴とする請求項3に記載の送信機支持スタンド。
【請求項5】
超音波を送受信する超音波プローブと、
前記超音波プローブによって受信された超音波に基づいて、画像を生成する装置本体と、
前記超音波プローブの位置検出に用いられる送信機を支持する送信機支持スタンドと、
を備え、
前記送信機支持スタンドが、
前記超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられた支持部と、
複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持するための支柱部と、
前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する位置固定部と、
を有することを特徴とする超音波診断装置。
【請求項1】
超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられた支持部と、
複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持するための支柱部と、
前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する位置固定部と、
を備えたことを特徴とする送信機支持スタンド。
【請求項2】
前記位置固定部と前記係合凹部とが係合した状態で前記支持部を前記支柱部に固定する固定機構をさらに備えたことを特徴とする請求項1に記載の送信機支持スタンド。
【請求項3】
前記固定機構が前記位置固定部の近接に配置されたことを特徴とする請求項2に記載の送信機支持スタンド。
【請求項4】
前記固定機構と前記位置固定部とが一体化されたことを特徴とする請求項3に記載の送信機支持スタンド。
【請求項5】
超音波を送受信する超音波プローブと、
前記超音波プローブによって受信された超音波に基づいて、画像を生成する装置本体と、
前記超音波プローブの位置検出に用いられる送信機を支持する送信機支持スタンドと、
を備え、
前記送信機支持スタンドが、
前記超音波プローブの位置検出に用いられる送信機を支持し、貫通孔が設けられた支持部と、
複数の係合凹部が長手方向に連続して形成され、前記支持部を所定の高さで保持するための支柱部と、
前記貫通孔内を移動して前記複数の係合凹部のいずれかに係合される係合凸部と、当該係合凸部を前記係合凹部の方向に押し付けて、前記係合凸部を前記係合凹部に係合させる弾性体とを有する位置固定部と、
を有することを特徴とする超音波診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−103012(P2013−103012A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249805(P2011−249805)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]