
逆走警告装置、逆走警告方法
【課題】コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供すること。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、道路を含む領域を撮影する撮影手段22と、撮影手段22が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段23と、画像データにおける対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする逆走警告装置100を提供する。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、道路を含む領域を撮影する撮影手段22と、撮影手段22が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段23と、画像データにおける対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする逆走警告装置100を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行方向が定められた道路を逆走するおそれがある場合に警告する逆走警告装置及び逆走警告方法に関する。
【背景技術】
【0002】
運転者は定められた進行方向に従い車道を走行するが、片側の車線数が複数ある場合などは対向車線を走行するようUターンしたつもりがそれまで走行していた車道を逆走してしまう場合がある。この点について、逆走を検出して乗員に警告するナビゲーション装置が提案されている(例えば、特許文献1参照。)。特許文献1には、逆走禁止道路情報をデータベースに記憶しておき、自車両が逆走禁止道路の順方向とは逆方向に走行した場合、運転者に警告するナビゲーション装置が記載されている。
【0003】
また、Uターンを検出するUターン検出装置が提案されている(例えば、特許文献2、3参照。)。特許文献2には、自車両の旋回角度が所定範囲内かつ旋回時の平均曲率が閾値より小さい場合、自車両がUターンしたと判定するUターン検出装置が記載されている。また、特許文献3には、所定時間内に、自車両が進行方向を反転したこと及び車線区分線の横断の両方が検出された場合に車両がUターンしたことを検出するUターン検出装置が提案されている。
【0004】
また、車両のフロントカメラで前方を撮影し、その画像を画像処理して逆走を検出する逆走検出装置が提案されている(例えば、特許文献4参照。)。特許文献4には、画像から中央分離帯が検出される場合は、道路標識の色情報及び道路の左側と右側の道路標識の大きさから逆走を検出し、中央分離帯が検出されない場合は、道路地図情報に記憶されている車線数と画像データから検出される車線数を比較して、自車線よりも右側の車線数が左側より少ない場合に逆走を検出する逆走検出装置が記載されている。
【特許文献1】特開2007−139531号公報
【特許文献2】特開2006−030116号公報
【特許文献3】特開2006−344164号公報
【特許文献4】特開2007−140883号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1〜4記載の技術では逆走を検出するためのコスト増が大きくなるおそれがあるという問題がある。例えば、特許文献1記載のナビゲーション装置は自車位置を検出したり逆走禁止道路情報をデータベースに記憶しておく必要がある。また、特許文献2記載のUターン検出装置は、自車両の旋回角度及び旋回時の平均曲率を検出するためのセンサが必要である。また、特許文献3記載のUターン検出装置は車線区分線を認識するためのフロントカメラに加え、反転を検出するために位置情報を検出する必要がある。また、特許文献4記載の逆走検出装置は、カラーの画像を撮影することを前提にしているためカラー撮影が可能なカメラが必要となる。
【0006】
ところで、自車両がいったん逆方向に反転してしまうと、順方向から走行してくる他車両の存在により自車両が順方向に方向転換することが困難となるので、自車両が反転する前に運転者に逆走のおそれがあることを警告することが好ましいと考えられる。この点に対し、先行文献1〜4記載の技術ではいずれも車両が逆方向に反転した後、又は、反転後に逆走したことを検出するので、逆走開始前に運転者に警告したり又は逆走を未然に防止することが困難であるという問題がある。例えば、特許文献1、4記載の方法では、車両が逆方向に走行するまでそれを検出しない。また、特許文献2又は3に記載されているようにUターンを検出する場合、Uターンが検出された時には既に車両は逆方向に反転しているので、反転前又は逆走の開始前に運転者に警告することは困難である。
【0007】
本発明は、上記課題に鑑み、コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供すること目的とする。
【課題を解決するための手段】
【0008】
上記課題に鑑み、本発明は、路面を含む所定範囲を撮影する撮影手段と、撮影手段が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段と、画像データにおける対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段と、を有することを特徴とする。
【0009】
本発明によれば、撮影された例えば車線区分線の角度を監視することで、画像データのみから逆走のおそれがあることを検出できる。また、対象物が略水平になった場合に逆走するおそれがあると検出するので、逆走の開始前に逆走のおそれがあることを検出できる。
【0010】
また、本発明の一形態において、撮影手段は車軸に略垂直な方向に光軸を有し、逆走検出手段は、対象物の向きが略水平になった場合、逆走のおそれがあることを検出することを特徴とする。
【0011】
本発明によれば、対象物が水平に撮影されたことのみから逆走のおそれがあることを検出できる。
【0012】
また、本発明の一形態において、逆走検出手段は、自車両が高速道路の本線を走行中にのみ逆走のおそれがあることを検出する、ことを特徴とする。
【0013】
本発明によれば、一時停止の停止線等を検出することを回避し、より確実に逆走のおそれがあることを検出できる。
【発明の効果】
【0014】
コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明を実施するために最良の形態について図面を参照しながら、実施例を挙げて説明する。
【実施例1】
【0016】
本実施例では、撮影された路面標示から走行レーンに対する自車両の車長方向を検出し、逆走のおそれがあることを検出する逆走警告装置100について説明する。車道には走行レーンを区切る車線区分線が路面標示されているが、車線区分線は走行レーンに平行な直線状の形状を有する。このため、自車両がUターンして逆走を開始するまでの間に、自車両の車長方向と車線区分線は必ず直角となる状態を経ると考えられ、バックカメラにより撮影された車線区分線の角度を監視することで車両が反転するおそれ、すなわち、逆走するおそれがあることを検出できる。
【0017】
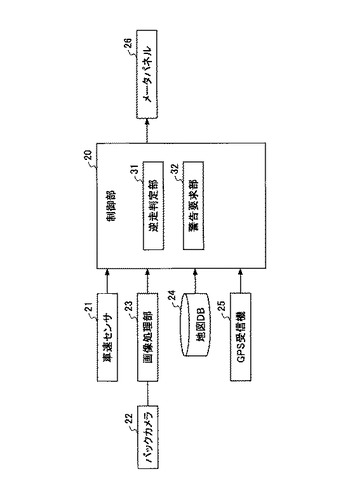
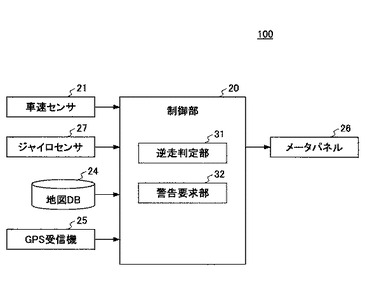
図1は、本実施例の逆走警告装置100のブロック図を示す。逆走警告装置100は、制御部20により制御され、制御部20には車速センサ21、バックカメラ22,画像処理部23、地図DB(Data Base)24、GPS(Global Positioning System)受信機25及びメータパネル26がCAN(Controller Area Network)等の車載LANや専用線を介して接続されている。制御部20はCPU、RAM、ROM及び入出力インターフェイスを備えたコンピュータ等により構成され、例えば、ナビゲーションシステムを制御するナビECU(Electronic Control Unit)が兼用することができる。ナビECUは自車両の位置や車速を検出しているので、逆走警告装置100の実現に要請される機能を備えており、兼用することで車載スペースを節約し重量増を抑制することができる。
【0018】
車速センサ21は、自車両の各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルス波形に整形して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径や凸部の間隔に応じて定めた補正値を乗じれば車速が得られる。
【0019】
バックカメラ22は、自車両の後部のバンパの略中央やリアガラスの上側略中央に、光軸を車両後方かつやや下向きに向けて配置される。バックカメラ22は、車軸に垂直な方向に光軸を有することが好適となる。バックカメラ22は、CMOS(Complementary Metal Oxide Semiconductor)等の光電変換素子を内蔵した撮像手段により構成される。バックカメラ22は光電変換素子の電圧を読み出しこのアナログ信号をA/D変換して所定の輝度階調のデジタルデータ(以下、画像データという)に変換する。なお、バックカメラ22はモノクロカメラであるが、カラー撮影が可能であってもよく又ステレオカメラであってもよい。バックカメラ22は、後方の所定範囲の画像データを1秒間に15〜30フレームの速度で撮影し、順次メモリに記憶していく。なお、バックカメラ22でなくフロントカメラを用いてもよい。
【0020】
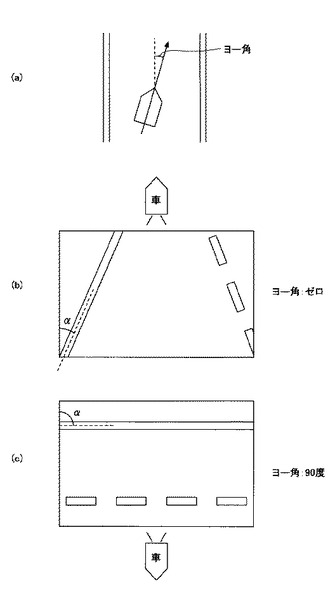
画像処理部23はメモリに記憶された画像データを読み出し車線区分線を認識し、車線区分線に対する自車両の車長方向の角度(以下、単にヨー角という)を検出する。図2(a)は車線区分線に対する車長方向のヨー角を模式的に示す図である。車線区分線の検出は、例えばLKAS(Lane Keeping Assist System)などで周知の方法を用いる。具体的には、1本の車線区分線は路面に対し高周波成分たるエッジを有するので、画像データの輝度値を水平方向及び垂直方向に微分すると、白線の両端にピークが得られそれを結んだエッジ線が推定できる。推定した複数のエッジ線から車線区分線の幅を考慮して一対となる複数組の車線区分線の候補線を抽出し、複数組の車線区分線の候補線のなかから、輝度や路面とのコントラストから定められる閾値や幅の閾値、線状の形状である等の特徴からマッチングなどの手法を適用して、白線と認められる1本の白線を選定する。選定した白線が有する複数エッジをハフ変換することで撮影された左右又は左右いずれかの白線の直線式が得られる。なお、車線区分線に限られず、走行レーンに平行なガードレールや中央分離帯の段差を認識してもよい。
【0021】
図2(b)(c)は撮影された画像データ及び車長方向の検出を説明する図である。自車両の車長方向が車線区分線と略平行の場合(ヨー角はゼロ)、画像データは図2(b)のようになり、自車両の車長方向が車線区分線と略垂直の場合(ヨー角は90度)、画像データは図2(c)のようになる。ここで、路面に対するバックカメラ22の光軸がなす角度は固定であるので、ヨー角に応じて、撮影された車線区分線と例えば画像データの所定の基準線とがなす角度αは一意に定まる。したがって、ヨー角に対応づけて、撮影された車線区分線と基準線とがなす角度αを予め登録しておけば、撮影された車線区分線と基準線とがなす角度αから、車長方向(ヨー角)を検出することができる。なお、図2(b)(c)では画像データに垂直な線を基準線とした。
【0022】
地図DB24はHDD(Hard Disk Drive)やフラッシュメモリ等で構成され、緯度や経度などの位置情報に対応づけて道路地図情報を記憶している。道路地図情報は、道路を構成するリンクのリンク情報と、リンクとリンクを接続するノード(交差点やリンク上の所定間隔毎の点)のノード情報とを対応づけたテーブル状のデータベースである。リンク情報にはリンク長、幅員、接続ノード、接続方向等が含まれるため、道路地図情報により実際の道路網が再現される。また、地図DB24は、リンク毎に高速道路や一般道などの道路種別、さらに高速道路であれば本線、ランプ、分離線又は合流線等の側線及びパーキングエリアを区別する情報が登録されている。なお、高速道路と同様の意味で自動車専用道路という言葉が用いられる場合があるが、本実施形態では両者を区別せず高速道路という。
【0023】
GPS受信機25は、地球の周りを周回する好ましくは4つ以上のGPS衛星を捕捉して、各GPS衛星からの電波の到達時間に基づき、自車両の位置(緯度・経度・標高)を検出する。位置の知られた基準局が発信するFM放送の電波を利用して、GPSの計測結果の誤差を修正して高精度に自車両の位置を検出してもよい。
【0024】
制御部20は、GPS受信機25が検出した自車両の位置情報を起点にして、ジャイロセンサが検出する自車両の進行方向に車速センサ21が検出する走行距離を累積して、自車両の位置を高精度に推定する。また、自車両の周囲の道路地図を利用して、推定された位置に対し最も確からしい道路に自車両の位置をマッチングするマップマッチングにより自車両の位置を補正する。
【0025】
メータパネル26は、逆走が検出されると警報音を吹鳴したり警告メッセージをスピーカから出力し、また、液晶やヘッドアップディスプレイなどの表示部に警告メッセージや逆走を意味するアイコンを表示するなどして運転者に警告する。なお、聴覚的な警告と視覚的な警告はいずれか一方のみ出力してもよい。
【0026】
また、制御部20は、CPUがプログラムを実行するか又はASIC(Application Specific Integrated Circuit)等のハードウェアにより実装される、自車両が逆走するおそれがあるか否かを判定する逆走判定部31及び逆走のおそれがあると判定された場合にメータパネル26に警告を要求する警告要求部32を有する。次述するように、逆走判定部31は角度αから自車両のヨー角を検出し、ヨー角と反転判定閾値θ0とを比較することで逆走のおそれがあることを検出する。
【0027】
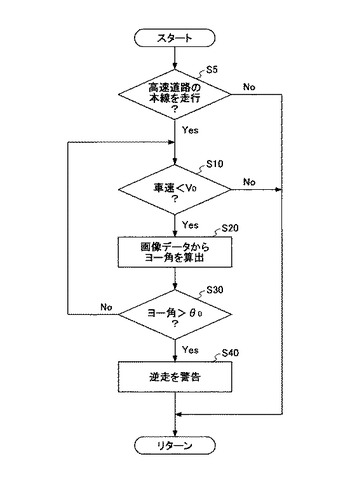
逆走警告装置100が逆走を検出する手順について図3のフローチャート図を用いて説明する。図3のフローチャート図は、例えばイグニッションがオンになるとスタートし、所定のサイクル時間毎に繰り返しされる。
【0028】
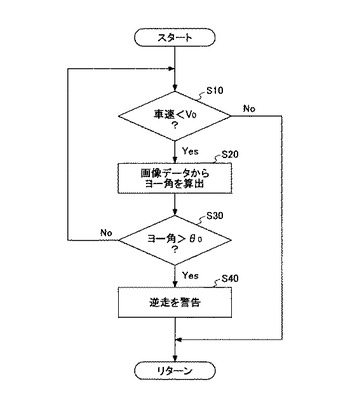
まず、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S10)。車速判定閾値V0は予め定められた定数であるが、Uターンするためには著しく車速を下げる必要があるため、この減速時の一般的な車速を車速判定閾値(例えば、V0=20〔km/h〕)とする。車速が車速判定閾値V0よりも小さくない場合(S10のNo)、図3の処理はそのまま終了する。
【0029】
車速が車速判定閾値V0よりも小さい場合(S10のYes)、逆走判定部31は画像データから検出した角度αからヨー角を算出する(S20)。画像データは順次メモリに記憶されるので、逆走判定部31は各画像データからヨー角を算出する。
【0030】
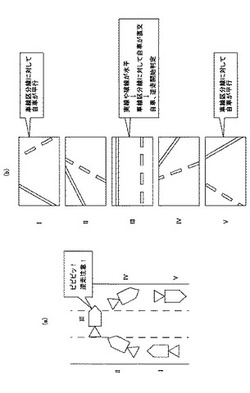
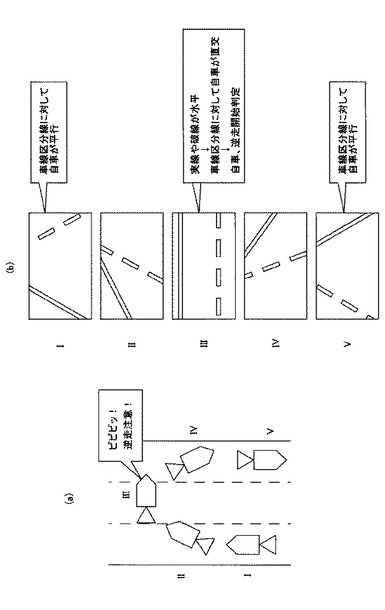
そして、逆走判定部31はヨー角が反転判定閾値θ0を超えたか否かを判定する(S30)。図4(a)は自車両がUターンする過程を模式的に示す図を、図4(b)は自車両のUターン途中における画像データの一例を、それぞれ示す。図4(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。状態「I」では自車両の車長方向は車線区分線と略平行であるので、図4(b)と同様に画像データでは車線区分線が略ハの字になる。
【0031】
自車両がUターンを継続すると、画像データにおける車線区分線は時計回りに回転し、状態「III」になると画像データの車線区分線は水平方向を向く。すなわち、状態「III」の時、自車両の車長方向と車線区分線とは直交しヨー角が90度になる。さらに、自車両がUターンを継続すると、図4(a)の自車両は状態「IV」を経て状態「V」となり、これに伴い画像データにおける車線区分線は時計回りに回転し、状態「V」では再び、画像データの車線区分線が略ハの字になる。
【0032】
図3に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、ヨー角が反転判定閾値θ0を超えたか否かの判定を繰り返す(S30)。反転判定閾値θ0を90度とすれば、図4(a)の状態「III」で自車両の逆走のおそれがあることを検出することができる。また、反転判定閾値θ0を例えば80度程度に設定しておけばより早期に逆走のおそれがあることを検出でき、反転判定閾値θ0を例えば100度程度に設定しておけば逆走のおそれがあることを確実に検出できる。
【0033】
ヨー角が反転閾値θ0を超えた場合(S30のYes)、逆走判定部31は自車両が逆走するおそれがあると判定し、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S40)。
【0034】
本実施例の逆走警告装置100は、撮影された画像データから路面標示を認識するだけで逆走のおそれがあることを検出することができるので、コスト増を抑制して逆走を未然に防止できる。また、反転判定閾値θ0を90度以下とすれば、逆走の開始前又は逆走開始直後に運転者に警告することができ、道路の逆走を確実に防止することができる。
【0035】
なお、本実施例では画像データからヨー角を数値で検出しヨー角と反転判定閾値θ0を比較したが、例えば画像データの車線区分線が水平になったことから逆走のおそれがあることを検出してもよい。画像データの車線区分線が水平となったことは画像データのみから検出できるので、ヨー角に対応づけて、撮影された車線区分線と基準線とがなす角度αを予め登録しておく必要がなくコスト増を抑制できる。この場合、バックカメラ22は車軸に略垂直な方向に光軸を有することが必要となる。
【0036】
また、画像データの車線区分線が水平になったことから逆走のおそれがあることを検出する場合、水平となった車線区分線がさらに時計周りに回転したこと(図4(b)の状態「III」から状態「IV」への遷移)を検出して逆走のおそれがあることを検出してもよい。状態間の遷移状態を判定対象とすることで、誤判定を低減することができる。
【0037】
〔切り返しをする場合(車線数の影響)〕
図4(a)に示したように逆走するおそれが高い道路は複数車線であることが多く、例えば3車線以上であれば切り返しすることなくUターンが可能である場合が多い。この場合、道路が4車線以上でも、本実施例の方法で逆走するおそれがあることを検出できる。これに対し、2車線以下の道路や回転半径の大きな車両で3車線の道路でUターンする場合、自車両が切り返しする場合があるが、本実施例の逆走警告装置100は、自車両が切り返しする場合でも同様に逆走のおそれがあることを検出することができる。
【0038】
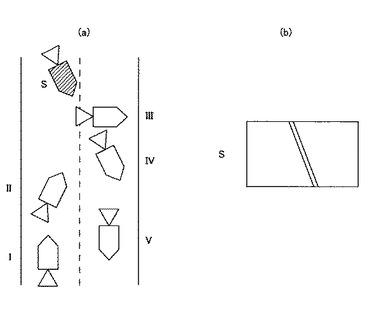
図5(a)は自車両がUターンする過程を模式的に示す図を、図5(b)は状態「S」における画像データの一例を、それぞれ示す。図5(a)の道路は片側が2車線である。このため、自車両は状態「III」の後、切り返しをして状態Sとなっている。状態Sの時の自車両のヨー角は90度を超えているので、画像データの車線区分線は水平状態よりも時計周りに回転した状態となる。したがって、ヨー角が90度となる前に切り返ししたり、反転判定閾値θ0を例えば100度とした場合でも、状態「III」から状態「S」の間で逆走のおそれがあることを検出することができる。
【0039】
また、逆走の開始前に車線区分線は必ず水平となるので、反転判定閾値θ0を例えば80度〜90度としておけば、その後の切り返しに関係なく逆走のおそれがあることを検出することができる。
【0040】
なお、自車両が切り返しをする場合、シフトポジションセンサが「後退」を示すので、シフトポジションセンサの信号から切り返しを検出し、後退走行時には車速が車速判定閾値V0以上となっても、ステップS20の判定を禁止する。これにより後退走行時に車速が車速判定閾値V0以上となっても、切り返しの前後において逆走のおそれがあることを検出できる。
【実施例2】
【0041】
実施例1の逆走警告装置100は道路種別に関わりなく逆走のおそれがあることを検出したが、高速道路を走行中にのみ路面標示から逆走のおそれがあることを検出することで、より確実に逆走のおそれがあることを検出できる。例えば、一般道では信号機の手前や優先道路への進入口に一時停止の停止線が路面標示されていたり、横断歩道が路面標示されていることがある。これらの路面標示は走行レーンを横切っているので、バックカメラ22により撮影した画像データには水平の線として撮影されることが多い。したがって、車速判定閾値V0よりも低速でこれらの路面標示を通過すると逆走のおそれがあると誤判定するおそれがある。これに対し、高速道路では一時停止の停止線等が路面標示されないか路面標示されても極めて少ないので、誤判定するおそれを低減できる。
【0042】
ところで、高速道路には、進入するためのランプ等や、一般道、同じ高速道路の他の車線又は他の高速道路と分離・合流するための側線、分離線又は合流線(以下、ランプ等と合わせ単に側線という)が接続されており、自車両が側線を走行可能となっている。また、高速道路にはパーキングエリアが設けられている。側線では、一時停止の停止線、合流や分岐に伴う車線数の減少を示す線が路面表示される場合があり、また、パーキングエリアでは駐車区画等を示す路面標示がある。これらの路面標示は一般道路の路面標示と同様、誤判定させるおそれがあるので、本実施例では、高速道路のうち本線のみで画像データを処理し逆走のおそれがあることを検出する。
【0043】
なお、自車両が高速道路の本線を走行しているか否かはGPS受信機25等により検出される自車両の位置に基づき地図DB24を参照することで判定される。また、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。
【0044】
図6は、逆走警告装置100が逆走を検出する手順を示すフローチャート図である。なお、図6において図3と同一ステップには同じ符号を付しその説明は簡単に行う。
【0045】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S5)。高速道路の本線を走行していない場合(S5のNo)、図6の処理はそのまま終了する。
【0046】
高速道路の本線を走行している場合(S5のYes)の処理は、実施例1と同様である。すなわち、車速が車速判定閾値V0未満(S10)になりヨー角が反転判定閾値θ0を超えると(S20)、逆走判定部31は自車両が逆走するおそれがあると判定し(S30)、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S40)。
【0047】
本実施例の逆走警告装置100は、実施例1の効果に加え、高速道路の本線でのみ逆走のおそれがあることを検出するので、より精度よく逆走のおそれがあることを検出することができる。
【0048】
なお、実施例1と同様に、ヨー角を求めることなく画像データの車線区分線が水平になったことから逆走のおそれがあることを検出でき、また、車線数に関わらず逆走のおそれがあることを検出できる。
【実施例3】
【0049】
本実施例では、高速道路の本線上において、車速が所定以下となった時の車長方向を基準に旋回角度を検出し、旋回角度が所定値(例えば、90度程度)になったことを検出して、自車両が逆走するおそれがあることを検出する。高速道路の本線はUターン走行できない構造になっているのでUターンする可能性は極めて小さいとしてよい。このため高速道路の本線で、車速が所定値以下の状態で旋回角度が所定値を超えた場合、高速道路を逆走するおそれがあることを確実に検出することができる。
【0050】
なお、高速道路にある側線やパーキングエリアでは逆走のおそれがあるか否かを判定しないので、湾曲した側線やパーキングエリアにおいて、低速な状態で旋回角度が所定値を超えても逆走のおそれがあると誤判定することもない。
【0051】
図7は、本実施例の逆走警告装置100のブロック図を示す。なお、図7において図1と同一構成部には同一の符号を付しその説明は省略する。図7の逆走警告装置100は、ジャイロセンサ27を有する。ジャイロセンサ27は、例えばマイクロマシニングで形成された震動片型ジャイロセンサであり、自車両の旋回速度に応じて生じるコリオリ力を電極間の変化による電圧信号として取り出す。旋回速度すなわちヨーレートを時間に対し積分すると旋回角度が得られるので、ジャイロセンサ27の出力を時間積分することで旋回角度を検出することができる。
【0052】
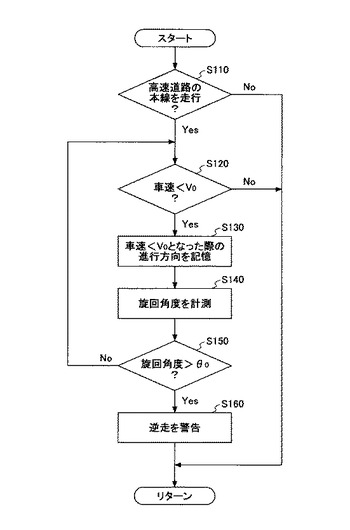
逆走警告装置100が逆走を検出する手順について図8のフローチャート図を用いて説明する。図8のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。
【0053】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S110)。なお、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。高速道路の本線を走行していない場合(S110のNo)、図8の処理はそのまま終了する。
【0054】
高速道路の本線を走行している場合(S110のYes)、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S120)。車速の判定は実施例1と同様である。
【0055】
車速が車速判定閾値V0よりも小さい場合(S120のYes)、逆走判定部31は車速が車速判定閾値V0未満となった時又はステップS20の判定時の進行方向を記憶する(S130)。したがって、車速が車速判定閾値V0よりも小さくなった際の進行方向がゼロ度(基準値)になる。なお、ステップS130の処理は1度のみ実行される。
【0056】
そして、ゼロ度とした進行方向を基準に自車両の旋回角度の計測を開始する(S140)。上述したように、ジャイロセンサ27の出力を時間積分することで旋回角度を検出できるので、例えば、微少時間毎のヨーレートを累積することで旋回角度が検出される。
【0057】
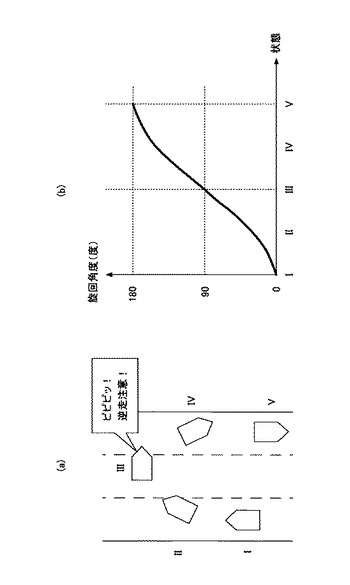
図9(a)は自車両がUターンする過程を模式的に示す図を、図9(b)は自車両のUターン過程における旋回角度の一例を、それぞれ示す。図9(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。したがって、図9(b)では状態「I」の旋回角度がゼロになっている。
【0058】
自車両がUターンを継続し、状態「II」を経て状態「III」となると自車両の車長方向はちょうど幅員方向を向くので、状態「III」では旋回角度が約90度である。さらに、自車両がUターンを継続し、状態「IV」を経て状態「V」となると自車両は車道の逆方向に反転するので、状態「V」では旋回角度が約180度となる。
【0059】
図8に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、旋回角度が反転判定閾値θ0を超えたか否かの判定を繰り返す(S150)。反転判定閾値θ0を90度とすれば、図9(a)の状態「III」で自車両の逆走を検出することができる。旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図8の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0060】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は自車両が逆走の直前であると判定でき、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0061】
なお、逆走するおそれが必ずしも確実でなくても逆走の開始前に警告することが好ましいので、例えば反転判定閾値θ0を80度程度に設定しておいてもよい。高速道路の本線において所定速度以下で旋回角度が80度以上になることは希と考えてよく、仮に単なる車線変更を逆走のおそれ有りと誤判定しても不要警報が発せられるおそれは少ない。また、逆走のおそれがあることを確実に検出するため、例えば反転判定閾値θ0を100度に設定しておいてもよい。
【0062】
本実施例の逆走警告装置100は、高速道路の本線であることを検出し高速道路の本線を走行中の場合にのみ車速及び旋回速度から逆走のおそれがあることを検出するので、逆走の開始前又は逆走開始直後に運転者に警告することができ、高速道路の逆走を確実に防止することができる。
【0063】
なお、本実施例の逆走警告装置100は、実施例1又は2と同様、車線数に関わらず逆走のおそれがあることを検出できる。
【図面の簡単な説明】
【0064】
【図1】逆走警告装置のブロック図の一例である(実施例1)。
【図2】車線区分線に対する車長方向のヨー角を模式的に示す図である。
【図3】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である。
【図4】自車両がUターンする過程を模式的に示す図、及び、自車両のUターン途中における画像データの一例を示す図である。
【図5】二車線において、自車両がUターンする過程を模式的に示す図、及び、自車両のUターン途中における画像データの一例を示す図である。
【図6】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である(実施例2)。
【図7】逆走警告装置のブロック図の一例である(実施例2)。
【図8】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である(実施例3)。
【図9】自車両がUターンする過程を模式的に示す図、及び、自車両のUターン過程における旋回角度の一例を示す図、である。
【符号の説明】
【0065】
20 制御部
21 車速センサ
22 バックカメラ
23 画像処理部
24 地図DB
25 GPS受信機
26 メータパネル
31 逆走判定部
32 警告要求部
100 逆走警告装置
【技術分野】
【0001】
本発明は、走行方向が定められた道路を逆走するおそれがある場合に警告する逆走警告装置及び逆走警告方法に関する。
【背景技術】
【0002】
運転者は定められた進行方向に従い車道を走行するが、片側の車線数が複数ある場合などは対向車線を走行するようUターンしたつもりがそれまで走行していた車道を逆走してしまう場合がある。この点について、逆走を検出して乗員に警告するナビゲーション装置が提案されている(例えば、特許文献1参照。)。特許文献1には、逆走禁止道路情報をデータベースに記憶しておき、自車両が逆走禁止道路の順方向とは逆方向に走行した場合、運転者に警告するナビゲーション装置が記載されている。
【0003】
また、Uターンを検出するUターン検出装置が提案されている(例えば、特許文献2、3参照。)。特許文献2には、自車両の旋回角度が所定範囲内かつ旋回時の平均曲率が閾値より小さい場合、自車両がUターンしたと判定するUターン検出装置が記載されている。また、特許文献3には、所定時間内に、自車両が進行方向を反転したこと及び車線区分線の横断の両方が検出された場合に車両がUターンしたことを検出するUターン検出装置が提案されている。
【0004】
また、車両のフロントカメラで前方を撮影し、その画像を画像処理して逆走を検出する逆走検出装置が提案されている(例えば、特許文献4参照。)。特許文献4には、画像から中央分離帯が検出される場合は、道路標識の色情報及び道路の左側と右側の道路標識の大きさから逆走を検出し、中央分離帯が検出されない場合は、道路地図情報に記憶されている車線数と画像データから検出される車線数を比較して、自車線よりも右側の車線数が左側より少ない場合に逆走を検出する逆走検出装置が記載されている。
【特許文献1】特開2007−139531号公報
【特許文献2】特開2006−030116号公報
【特許文献3】特開2006−344164号公報
【特許文献4】特開2007−140883号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1〜4記載の技術では逆走を検出するためのコスト増が大きくなるおそれがあるという問題がある。例えば、特許文献1記載のナビゲーション装置は自車位置を検出したり逆走禁止道路情報をデータベースに記憶しておく必要がある。また、特許文献2記載のUターン検出装置は、自車両の旋回角度及び旋回時の平均曲率を検出するためのセンサが必要である。また、特許文献3記載のUターン検出装置は車線区分線を認識するためのフロントカメラに加え、反転を検出するために位置情報を検出する必要がある。また、特許文献4記載の逆走検出装置は、カラーの画像を撮影することを前提にしているためカラー撮影が可能なカメラが必要となる。
【0006】
ところで、自車両がいったん逆方向に反転してしまうと、順方向から走行してくる他車両の存在により自車両が順方向に方向転換することが困難となるので、自車両が反転する前に運転者に逆走のおそれがあることを警告することが好ましいと考えられる。この点に対し、先行文献1〜4記載の技術ではいずれも車両が逆方向に反転した後、又は、反転後に逆走したことを検出するので、逆走開始前に運転者に警告したり又は逆走を未然に防止することが困難であるという問題がある。例えば、特許文献1、4記載の方法では、車両が逆方向に走行するまでそれを検出しない。また、特許文献2又は3に記載されているようにUターンを検出する場合、Uターンが検出された時には既に車両は逆方向に反転しているので、反転前又は逆走の開始前に運転者に警告することは困難である。
【0007】
本発明は、上記課題に鑑み、コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供すること目的とする。
【課題を解決するための手段】
【0008】
上記課題に鑑み、本発明は、路面を含む所定範囲を撮影する撮影手段と、撮影手段が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段と、画像データにおける対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段と、を有することを特徴とする。
【0009】
本発明によれば、撮影された例えば車線区分線の角度を監視することで、画像データのみから逆走のおそれがあることを検出できる。また、対象物が略水平になった場合に逆走するおそれがあると検出するので、逆走の開始前に逆走のおそれがあることを検出できる。
【0010】
また、本発明の一形態において、撮影手段は車軸に略垂直な方向に光軸を有し、逆走検出手段は、対象物の向きが略水平になった場合、逆走のおそれがあることを検出することを特徴とする。
【0011】
本発明によれば、対象物が水平に撮影されたことのみから逆走のおそれがあることを検出できる。
【0012】
また、本発明の一形態において、逆走検出手段は、自車両が高速道路の本線を走行中にのみ逆走のおそれがあることを検出する、ことを特徴とする。
【0013】
本発明によれば、一時停止の停止線等を検出することを回避し、より確実に逆走のおそれがあることを検出できる。
【発明の効果】
【0014】
コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明を実施するために最良の形態について図面を参照しながら、実施例を挙げて説明する。
【実施例1】
【0016】
本実施例では、撮影された路面標示から走行レーンに対する自車両の車長方向を検出し、逆走のおそれがあることを検出する逆走警告装置100について説明する。車道には走行レーンを区切る車線区分線が路面標示されているが、車線区分線は走行レーンに平行な直線状の形状を有する。このため、自車両がUターンして逆走を開始するまでの間に、自車両の車長方向と車線区分線は必ず直角となる状態を経ると考えられ、バックカメラにより撮影された車線区分線の角度を監視することで車両が反転するおそれ、すなわち、逆走するおそれがあることを検出できる。
【0017】
図1は、本実施例の逆走警告装置100のブロック図を示す。逆走警告装置100は、制御部20により制御され、制御部20には車速センサ21、バックカメラ22,画像処理部23、地図DB(Data Base)24、GPS(Global Positioning System)受信機25及びメータパネル26がCAN(Controller Area Network)等の車載LANや専用線を介して接続されている。制御部20はCPU、RAM、ROM及び入出力インターフェイスを備えたコンピュータ等により構成され、例えば、ナビゲーションシステムを制御するナビECU(Electronic Control Unit)が兼用することができる。ナビECUは自車両の位置や車速を検出しているので、逆走警告装置100の実現に要請される機能を備えており、兼用することで車載スペースを節約し重量増を抑制することができる。
【0018】
車速センサ21は、自車両の各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルス波形に整形して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径や凸部の間隔に応じて定めた補正値を乗じれば車速が得られる。
【0019】
バックカメラ22は、自車両の後部のバンパの略中央やリアガラスの上側略中央に、光軸を車両後方かつやや下向きに向けて配置される。バックカメラ22は、車軸に垂直な方向に光軸を有することが好適となる。バックカメラ22は、CMOS(Complementary Metal Oxide Semiconductor)等の光電変換素子を内蔵した撮像手段により構成される。バックカメラ22は光電変換素子の電圧を読み出しこのアナログ信号をA/D変換して所定の輝度階調のデジタルデータ(以下、画像データという)に変換する。なお、バックカメラ22はモノクロカメラであるが、カラー撮影が可能であってもよく又ステレオカメラであってもよい。バックカメラ22は、後方の所定範囲の画像データを1秒間に15〜30フレームの速度で撮影し、順次メモリに記憶していく。なお、バックカメラ22でなくフロントカメラを用いてもよい。
【0020】
画像処理部23はメモリに記憶された画像データを読み出し車線区分線を認識し、車線区分線に対する自車両の車長方向の角度(以下、単にヨー角という)を検出する。図2(a)は車線区分線に対する車長方向のヨー角を模式的に示す図である。車線区分線の検出は、例えばLKAS(Lane Keeping Assist System)などで周知の方法を用いる。具体的には、1本の車線区分線は路面に対し高周波成分たるエッジを有するので、画像データの輝度値を水平方向及び垂直方向に微分すると、白線の両端にピークが得られそれを結んだエッジ線が推定できる。推定した複数のエッジ線から車線区分線の幅を考慮して一対となる複数組の車線区分線の候補線を抽出し、複数組の車線区分線の候補線のなかから、輝度や路面とのコントラストから定められる閾値や幅の閾値、線状の形状である等の特徴からマッチングなどの手法を適用して、白線と認められる1本の白線を選定する。選定した白線が有する複数エッジをハフ変換することで撮影された左右又は左右いずれかの白線の直線式が得られる。なお、車線区分線に限られず、走行レーンに平行なガードレールや中央分離帯の段差を認識してもよい。
【0021】
図2(b)(c)は撮影された画像データ及び車長方向の検出を説明する図である。自車両の車長方向が車線区分線と略平行の場合(ヨー角はゼロ)、画像データは図2(b)のようになり、自車両の車長方向が車線区分線と略垂直の場合(ヨー角は90度)、画像データは図2(c)のようになる。ここで、路面に対するバックカメラ22の光軸がなす角度は固定であるので、ヨー角に応じて、撮影された車線区分線と例えば画像データの所定の基準線とがなす角度αは一意に定まる。したがって、ヨー角に対応づけて、撮影された車線区分線と基準線とがなす角度αを予め登録しておけば、撮影された車線区分線と基準線とがなす角度αから、車長方向(ヨー角)を検出することができる。なお、図2(b)(c)では画像データに垂直な線を基準線とした。
【0022】
地図DB24はHDD(Hard Disk Drive)やフラッシュメモリ等で構成され、緯度や経度などの位置情報に対応づけて道路地図情報を記憶している。道路地図情報は、道路を構成するリンクのリンク情報と、リンクとリンクを接続するノード(交差点やリンク上の所定間隔毎の点)のノード情報とを対応づけたテーブル状のデータベースである。リンク情報にはリンク長、幅員、接続ノード、接続方向等が含まれるため、道路地図情報により実際の道路網が再現される。また、地図DB24は、リンク毎に高速道路や一般道などの道路種別、さらに高速道路であれば本線、ランプ、分離線又は合流線等の側線及びパーキングエリアを区別する情報が登録されている。なお、高速道路と同様の意味で自動車専用道路という言葉が用いられる場合があるが、本実施形態では両者を区別せず高速道路という。
【0023】
GPS受信機25は、地球の周りを周回する好ましくは4つ以上のGPS衛星を捕捉して、各GPS衛星からの電波の到達時間に基づき、自車両の位置(緯度・経度・標高)を検出する。位置の知られた基準局が発信するFM放送の電波を利用して、GPSの計測結果の誤差を修正して高精度に自車両の位置を検出してもよい。
【0024】
制御部20は、GPS受信機25が検出した自車両の位置情報を起点にして、ジャイロセンサが検出する自車両の進行方向に車速センサ21が検出する走行距離を累積して、自車両の位置を高精度に推定する。また、自車両の周囲の道路地図を利用して、推定された位置に対し最も確からしい道路に自車両の位置をマッチングするマップマッチングにより自車両の位置を補正する。
【0025】
メータパネル26は、逆走が検出されると警報音を吹鳴したり警告メッセージをスピーカから出力し、また、液晶やヘッドアップディスプレイなどの表示部に警告メッセージや逆走を意味するアイコンを表示するなどして運転者に警告する。なお、聴覚的な警告と視覚的な警告はいずれか一方のみ出力してもよい。
【0026】
また、制御部20は、CPUがプログラムを実行するか又はASIC(Application Specific Integrated Circuit)等のハードウェアにより実装される、自車両が逆走するおそれがあるか否かを判定する逆走判定部31及び逆走のおそれがあると判定された場合にメータパネル26に警告を要求する警告要求部32を有する。次述するように、逆走判定部31は角度αから自車両のヨー角を検出し、ヨー角と反転判定閾値θ0とを比較することで逆走のおそれがあることを検出する。
【0027】
逆走警告装置100が逆走を検出する手順について図3のフローチャート図を用いて説明する。図3のフローチャート図は、例えばイグニッションがオンになるとスタートし、所定のサイクル時間毎に繰り返しされる。
【0028】
まず、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S10)。車速判定閾値V0は予め定められた定数であるが、Uターンするためには著しく車速を下げる必要があるため、この減速時の一般的な車速を車速判定閾値(例えば、V0=20〔km/h〕)とする。車速が車速判定閾値V0よりも小さくない場合(S10のNo)、図3の処理はそのまま終了する。
【0029】
車速が車速判定閾値V0よりも小さい場合(S10のYes)、逆走判定部31は画像データから検出した角度αからヨー角を算出する(S20)。画像データは順次メモリに記憶されるので、逆走判定部31は各画像データからヨー角を算出する。
【0030】
そして、逆走判定部31はヨー角が反転判定閾値θ0を超えたか否かを判定する(S30)。図4(a)は自車両がUターンする過程を模式的に示す図を、図4(b)は自車両のUターン途中における画像データの一例を、それぞれ示す。図4(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。状態「I」では自車両の車長方向は車線区分線と略平行であるので、図4(b)と同様に画像データでは車線区分線が略ハの字になる。
【0031】
自車両がUターンを継続すると、画像データにおける車線区分線は時計回りに回転し、状態「III」になると画像データの車線区分線は水平方向を向く。すなわち、状態「III」の時、自車両の車長方向と車線区分線とは直交しヨー角が90度になる。さらに、自車両がUターンを継続すると、図4(a)の自車両は状態「IV」を経て状態「V」となり、これに伴い画像データにおける車線区分線は時計回りに回転し、状態「V」では再び、画像データの車線区分線が略ハの字になる。
【0032】
図3に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、ヨー角が反転判定閾値θ0を超えたか否かの判定を繰り返す(S30)。反転判定閾値θ0を90度とすれば、図4(a)の状態「III」で自車両の逆走のおそれがあることを検出することができる。また、反転判定閾値θ0を例えば80度程度に設定しておけばより早期に逆走のおそれがあることを検出でき、反転判定閾値θ0を例えば100度程度に設定しておけば逆走のおそれがあることを確実に検出できる。
【0033】
ヨー角が反転閾値θ0を超えた場合(S30のYes)、逆走判定部31は自車両が逆走するおそれがあると判定し、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S40)。
【0034】
本実施例の逆走警告装置100は、撮影された画像データから路面標示を認識するだけで逆走のおそれがあることを検出することができるので、コスト増を抑制して逆走を未然に防止できる。また、反転判定閾値θ0を90度以下とすれば、逆走の開始前又は逆走開始直後に運転者に警告することができ、道路の逆走を確実に防止することができる。
【0035】
なお、本実施例では画像データからヨー角を数値で検出しヨー角と反転判定閾値θ0を比較したが、例えば画像データの車線区分線が水平になったことから逆走のおそれがあることを検出してもよい。画像データの車線区分線が水平となったことは画像データのみから検出できるので、ヨー角に対応づけて、撮影された車線区分線と基準線とがなす角度αを予め登録しておく必要がなくコスト増を抑制できる。この場合、バックカメラ22は車軸に略垂直な方向に光軸を有することが必要となる。
【0036】
また、画像データの車線区分線が水平になったことから逆走のおそれがあることを検出する場合、水平となった車線区分線がさらに時計周りに回転したこと(図4(b)の状態「III」から状態「IV」への遷移)を検出して逆走のおそれがあることを検出してもよい。状態間の遷移状態を判定対象とすることで、誤判定を低減することができる。
【0037】
〔切り返しをする場合(車線数の影響)〕
図4(a)に示したように逆走するおそれが高い道路は複数車線であることが多く、例えば3車線以上であれば切り返しすることなくUターンが可能である場合が多い。この場合、道路が4車線以上でも、本実施例の方法で逆走するおそれがあることを検出できる。これに対し、2車線以下の道路や回転半径の大きな車両で3車線の道路でUターンする場合、自車両が切り返しする場合があるが、本実施例の逆走警告装置100は、自車両が切り返しする場合でも同様に逆走のおそれがあることを検出することができる。
【0038】
図5(a)は自車両がUターンする過程を模式的に示す図を、図5(b)は状態「S」における画像データの一例を、それぞれ示す。図5(a)の道路は片側が2車線である。このため、自車両は状態「III」の後、切り返しをして状態Sとなっている。状態Sの時の自車両のヨー角は90度を超えているので、画像データの車線区分線は水平状態よりも時計周りに回転した状態となる。したがって、ヨー角が90度となる前に切り返ししたり、反転判定閾値θ0を例えば100度とした場合でも、状態「III」から状態「S」の間で逆走のおそれがあることを検出することができる。
【0039】
また、逆走の開始前に車線区分線は必ず水平となるので、反転判定閾値θ0を例えば80度〜90度としておけば、その後の切り返しに関係なく逆走のおそれがあることを検出することができる。
【0040】
なお、自車両が切り返しをする場合、シフトポジションセンサが「後退」を示すので、シフトポジションセンサの信号から切り返しを検出し、後退走行時には車速が車速判定閾値V0以上となっても、ステップS20の判定を禁止する。これにより後退走行時に車速が車速判定閾値V0以上となっても、切り返しの前後において逆走のおそれがあることを検出できる。
【実施例2】
【0041】
実施例1の逆走警告装置100は道路種別に関わりなく逆走のおそれがあることを検出したが、高速道路を走行中にのみ路面標示から逆走のおそれがあることを検出することで、より確実に逆走のおそれがあることを検出できる。例えば、一般道では信号機の手前や優先道路への進入口に一時停止の停止線が路面標示されていたり、横断歩道が路面標示されていることがある。これらの路面標示は走行レーンを横切っているので、バックカメラ22により撮影した画像データには水平の線として撮影されることが多い。したがって、車速判定閾値V0よりも低速でこれらの路面標示を通過すると逆走のおそれがあると誤判定するおそれがある。これに対し、高速道路では一時停止の停止線等が路面標示されないか路面標示されても極めて少ないので、誤判定するおそれを低減できる。
【0042】
ところで、高速道路には、進入するためのランプ等や、一般道、同じ高速道路の他の車線又は他の高速道路と分離・合流するための側線、分離線又は合流線(以下、ランプ等と合わせ単に側線という)が接続されており、自車両が側線を走行可能となっている。また、高速道路にはパーキングエリアが設けられている。側線では、一時停止の停止線、合流や分岐に伴う車線数の減少を示す線が路面表示される場合があり、また、パーキングエリアでは駐車区画等を示す路面標示がある。これらの路面標示は一般道路の路面標示と同様、誤判定させるおそれがあるので、本実施例では、高速道路のうち本線のみで画像データを処理し逆走のおそれがあることを検出する。
【0043】
なお、自車両が高速道路の本線を走行しているか否かはGPS受信機25等により検出される自車両の位置に基づき地図DB24を参照することで判定される。また、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。
【0044】
図6は、逆走警告装置100が逆走を検出する手順を示すフローチャート図である。なお、図6において図3と同一ステップには同じ符号を付しその説明は簡単に行う。
【0045】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S5)。高速道路の本線を走行していない場合(S5のNo)、図6の処理はそのまま終了する。
【0046】
高速道路の本線を走行している場合(S5のYes)の処理は、実施例1と同様である。すなわち、車速が車速判定閾値V0未満(S10)になりヨー角が反転判定閾値θ0を超えると(S20)、逆走判定部31は自車両が逆走するおそれがあると判定し(S30)、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S40)。
【0047】
本実施例の逆走警告装置100は、実施例1の効果に加え、高速道路の本線でのみ逆走のおそれがあることを検出するので、より精度よく逆走のおそれがあることを検出することができる。
【0048】
なお、実施例1と同様に、ヨー角を求めることなく画像データの車線区分線が水平になったことから逆走のおそれがあることを検出でき、また、車線数に関わらず逆走のおそれがあることを検出できる。
【実施例3】
【0049】
本実施例では、高速道路の本線上において、車速が所定以下となった時の車長方向を基準に旋回角度を検出し、旋回角度が所定値(例えば、90度程度)になったことを検出して、自車両が逆走するおそれがあることを検出する。高速道路の本線はUターン走行できない構造になっているのでUターンする可能性は極めて小さいとしてよい。このため高速道路の本線で、車速が所定値以下の状態で旋回角度が所定値を超えた場合、高速道路を逆走するおそれがあることを確実に検出することができる。
【0050】
なお、高速道路にある側線やパーキングエリアでは逆走のおそれがあるか否かを判定しないので、湾曲した側線やパーキングエリアにおいて、低速な状態で旋回角度が所定値を超えても逆走のおそれがあると誤判定することもない。
【0051】
図7は、本実施例の逆走警告装置100のブロック図を示す。なお、図7において図1と同一構成部には同一の符号を付しその説明は省略する。図7の逆走警告装置100は、ジャイロセンサ27を有する。ジャイロセンサ27は、例えばマイクロマシニングで形成された震動片型ジャイロセンサであり、自車両の旋回速度に応じて生じるコリオリ力を電極間の変化による電圧信号として取り出す。旋回速度すなわちヨーレートを時間に対し積分すると旋回角度が得られるので、ジャイロセンサ27の出力を時間積分することで旋回角度を検出することができる。
【0052】
逆走警告装置100が逆走を検出する手順について図8のフローチャート図を用いて説明する。図8のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。
【0053】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S110)。なお、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。高速道路の本線を走行していない場合(S110のNo)、図8の処理はそのまま終了する。
【0054】
高速道路の本線を走行している場合(S110のYes)、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S120)。車速の判定は実施例1と同様である。
【0055】
車速が車速判定閾値V0よりも小さい場合(S120のYes)、逆走判定部31は車速が車速判定閾値V0未満となった時又はステップS20の判定時の進行方向を記憶する(S130)。したがって、車速が車速判定閾値V0よりも小さくなった際の進行方向がゼロ度(基準値)になる。なお、ステップS130の処理は1度のみ実行される。
【0056】
そして、ゼロ度とした進行方向を基準に自車両の旋回角度の計測を開始する(S140)。上述したように、ジャイロセンサ27の出力を時間積分することで旋回角度を検出できるので、例えば、微少時間毎のヨーレートを累積することで旋回角度が検出される。
【0057】
図9(a)は自車両がUターンする過程を模式的に示す図を、図9(b)は自車両のUターン過程における旋回角度の一例を、それぞれ示す。図9(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。したがって、図9(b)では状態「I」の旋回角度がゼロになっている。
【0058】
自車両がUターンを継続し、状態「II」を経て状態「III」となると自車両の車長方向はちょうど幅員方向を向くので、状態「III」では旋回角度が約90度である。さらに、自車両がUターンを継続し、状態「IV」を経て状態「V」となると自車両は車道の逆方向に反転するので、状態「V」では旋回角度が約180度となる。
【0059】
図8に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、旋回角度が反転判定閾値θ0を超えたか否かの判定を繰り返す(S150)。反転判定閾値θ0を90度とすれば、図9(a)の状態「III」で自車両の逆走を検出することができる。旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図8の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0060】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は自車両が逆走の直前であると判定でき、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0061】
なお、逆走するおそれが必ずしも確実でなくても逆走の開始前に警告することが好ましいので、例えば反転判定閾値θ0を80度程度に設定しておいてもよい。高速道路の本線において所定速度以下で旋回角度が80度以上になることは希と考えてよく、仮に単なる車線変更を逆走のおそれ有りと誤判定しても不要警報が発せられるおそれは少ない。また、逆走のおそれがあることを確実に検出するため、例えば反転判定閾値θ0を100度に設定しておいてもよい。
【0062】
本実施例の逆走警告装置100は、高速道路の本線であることを検出し高速道路の本線を走行中の場合にのみ車速及び旋回速度から逆走のおそれがあることを検出するので、逆走の開始前又は逆走開始直後に運転者に警告することができ、高速道路の逆走を確実に防止することができる。
【0063】
なお、本実施例の逆走警告装置100は、実施例1又は2と同様、車線数に関わらず逆走のおそれがあることを検出できる。
【図面の簡単な説明】
【0064】
【図1】逆走警告装置のブロック図の一例である(実施例1)。
【図2】車線区分線に対する車長方向のヨー角を模式的に示す図である。
【図3】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である。
【図4】自車両がUターンする過程を模式的に示す図、及び、自車両のUターン途中における画像データの一例を示す図である。
【図5】二車線において、自車両がUターンする過程を模式的に示す図、及び、自車両のUターン途中における画像データの一例を示す図である。
【図6】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である(実施例2)。
【図7】逆走警告装置のブロック図の一例である(実施例2)。
【図8】逆走警告装置が逆走を検出する手順を示すフローチャート図の一例である(実施例3)。
【図9】自車両がUターンする過程を模式的に示す図、及び、自車両のUターン過程における旋回角度の一例を示す図、である。
【符号の説明】
【0065】
20 制御部
21 車速センサ
22 バックカメラ
23 画像処理部
24 地図DB
25 GPS受信機
26 メータパネル
31 逆走判定部
32 警告要求部
100 逆走警告装置
【特許請求の範囲】
【請求項1】
所定以下の車速で逆走のおそれを検出する逆走警告装置であって、
路面を含む所定範囲を撮影する撮影手段と、
前記撮影手段が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段と、
画像データにおける前記対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段と、
を有することを特徴とする逆走警告装置。
【請求項2】
前記撮影手段は車軸に略垂直な方向に光軸を有し、
前記逆走検出手段は、前記対象物の前記向きが略水平になった場合、逆走のおそれがあることを検出する、
ことを特徴とする請求項1記載の逆走警告装置。
【請求項3】
前記逆走検出手段は、自車両が高速道路の本線を走行中にのみ逆走のおそれがあることを検出する、
ことを特徴とする請求項1又は2記載の逆走警告装置。
【請求項4】
前記逆走検出手段が逆走のおそれがあることを検出した場合、乗員に警告する警告手段、を有することを特徴とする請求項1〜3いずれか1項記載の逆走警告装置。
【請求項5】
所定以下の車速で逆走のおそれを検出する逆走警告方法であって、
撮影手段が、路面を含む所定範囲を撮影するステップと、
画像処理手段が、前記撮影手段により撮影された画像データから走行レーンに平行な対象物を認識するステップと、
逆走検出手段が、画像データにおける前記対象物の長手方向の向きから、逆走のおそれがあることを検出するステップと、
を有することを特徴とする逆走警告方法。
【請求項1】
所定以下の車速で逆走のおそれを検出する逆走警告装置であって、
路面を含む所定範囲を撮影する撮影手段と、
前記撮影手段が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段と、
画像データにおける前記対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段と、
を有することを特徴とする逆走警告装置。
【請求項2】
前記撮影手段は車軸に略垂直な方向に光軸を有し、
前記逆走検出手段は、前記対象物の前記向きが略水平になった場合、逆走のおそれがあることを検出する、
ことを特徴とする請求項1記載の逆走警告装置。
【請求項3】
前記逆走検出手段は、自車両が高速道路の本線を走行中にのみ逆走のおそれがあることを検出する、
ことを特徴とする請求項1又は2記載の逆走警告装置。
【請求項4】
前記逆走検出手段が逆走のおそれがあることを検出した場合、乗員に警告する警告手段、を有することを特徴とする請求項1〜3いずれか1項記載の逆走警告装置。
【請求項5】
所定以下の車速で逆走のおそれを検出する逆走警告方法であって、
撮影手段が、路面を含む所定範囲を撮影するステップと、
画像処理手段が、前記撮影手段により撮影された画像データから走行レーンに平行な対象物を認識するステップと、
逆走検出手段が、画像データにおける前記対象物の長手方向の向きから、逆走のおそれがあることを検出するステップと、
を有することを特徴とする逆走警告方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−250965(P2009−250965A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−103499(P2008−103499)
【出願日】平成20年4月11日(2008.4.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月11日(2008.4.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]