
逆走警告装置
【課題】逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供すること。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、自律航法により自車位置を検出する自律航法手段33と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段22と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、自律航法により自車位置を検出する自律航法手段33と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段22と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行方向が定められた道路を逆走するおそれがある場合、乗員に警告する逆走警告装置に関する。
【背景技術】
【0002】
車両は道路の右側又は左側に寄って走行することが各国毎に法令等で義務づけられている。こうすることで、各車両が対向車と衝突せず円滑に走行することができる。しかし、高速道路のパーキングエリアから本線に出る際や、片側の走行車線の数が多い道路をUターンしたりこの道路に向けて右折するような場合に、運転者が気付かないうちに対向車線を逆走するおそれがある。
【0003】
そこで、このような逆走を防止する技術が提案されている(例えば、特許文献1参照。)。特許文献1には、カメラが撮影した画像から中央分離帯を検出した場合、道路標識が道路の右側又は左側に位置している道路標識の大きさが正常走行時の大きさと異なるか否かにより逆走を検出する逆走検出装置が開示されている。また、特許文献1に記載の逆走検出装置は、中央分離帯を検出しない場合、自車位置の右側と左側の車線数をそれぞれ検出し、自車位置より右側の車線数が左側の車線数より少ない場合、車両が逆走していると判別する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−140883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された逆走検出装置はフロントカメラが撮影する画像から道路標識が検出されないと逆走を検出できないので、逆走の開始直後には逆走を検出できないおそれがあるという問題がある。また、フロントカメラの普及率は低く、また、カラーカメラである必要があるなど、制約が多い。
【0006】
そこで本出願人は、上記課題に鑑み、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置を既に提案している。
【0007】
しかし、本出願人が提案した逆走警告装置は、希な状況であるが、逆走するおそれがない状況において逆走するおそれがあると誤判定する場合があることが判明した。
【0008】
本発明は、上記課題に鑑み、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題に鑑み、本発明は、所定以下の車速で逆走のおそれを検出する逆走警告装置であって、自律航法により自車位置を検出する自律航法手段と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段と、を有することを特徴とする。
【発明の効果】
【0010】
逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】逆走警告装置のブロック図の一例である。
【図2】逆走警告装置が逆走を検出する手順を説明するフローチャート図の一例である。
【図3】自車両がUターンする過程を模式的に示す図、Uターン過程における旋回角度の一例を、それぞれ示す図である。
【図4】新設されたランプを走行している車両を模式的に示す図の一例である。
【図5】マップマッチング部が地図DBに記憶されている道路から最も確からしい道路に車両の位置をマッチングした状態を説明する図の一例である。
【図6】誤判定の防止を説明する図の一例である。
【図7】誤判定を防止可能な逆走警告装置が逆走を検出する手順を説明するフローチャート図の一例である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について図面を参照しながら説明する。
まず、本出願人がすでに出願した逆走警告装置について説明し、その後、本実施形態の逆走警告装置100による逆走の誤判定の防止について説明する。
【0013】
〔逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置100について〕
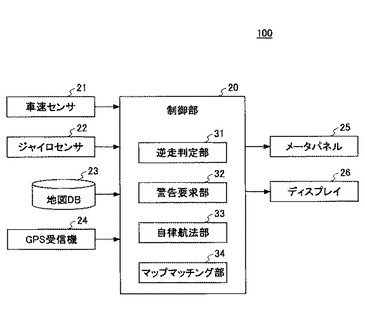
図1は、本実施形態の逆走警告装置100のブロック図の一例である。すでに出願した逆走警告装置のブロック図は、本実施形態の逆走警告装置100のブロック図により包含されるので、ブロック図は共通にして説明する。なお、より詳細には、すでに出願した逆走警告装置と本実施形態の逆走警告装置100とは逆走判定部31の機能が異なる。
【0014】
逆走警告装置100は制御部20により制御され、制御部20には車速センサ21、ジャイロセンサ22、地図DB(Data Base)23、GPS(Global Positioning System)受信機24、メータパネル25及びディスプレイ26が、CAN(Controller Area Network)等の車載LANや専用線を介して接続されている。制御部20はCPU、RAM、ROM、ASIC(Application Specific Integrated Circuit)及び入出力インターフェイスを備えたコンピュータ等により構成され、例えば、ナビゲーションシステムを制御するナビECU(Electronic Control Unit)が兼用することができる。ナビECUは自車両の位置や車速を検出しているので、逆走警告装置100の実現に要請される機能を備えており、兼用することで車載スペースを節約し重量増を抑制することができる。
【0015】
車速センサ21は、例えば、自車両の各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルス波形に整形して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径や凸部の間隔に応じて定めた補正値を乗じれば車速が得られる。
【0016】
ジャイロセンサ22は、例えばマイクロマシニングで形成された震動片型ジャイロセンサであり、自車両の旋回速度に応じて生じるコリオリ力を電極間の変化による電圧信号として取り出す。旋回速度すなわちヨーレートを時間に対し積分するとヨー角が得られるので、このヨー角を時間積分することで旋回角度を検出することができる。ジャイロセンサ22は、旋回角度だけでなくピッチング方向の進行方向を検出可能な3Dジャイロであってもよい。
【0017】
地図DB23はHDD(Hard Disk Drive)やフラッシュメモリ等で構成され、緯度や経度などの位置情報に対応づけて道路地図情報を記憶している。道路地図情報は、道路を構成するリンクのリンク情報と、リンクとリンクを接続するノード(交差点やリンク上の所定間隔毎の点)のノード情報とを対応づけたテーブル状のデータベースである。リンク情報にはリンク長、幅員、接続ノード、接続方向等が含まれるため、道路地図情報により実際の道路網が再現される。また、地図DB23は、高速道路、一般道などの道路種別毎に道路地図情報を記憶している。このような記憶構造により、制御部は道路種別毎に道路地図を描画できるので地図DB23へのアクセスが高速になる。
【0018】
また、地図DB23には、高速道路であれば本線、ランプ、分離線又は合流線等の側線及びパーキングエリア(以下、総称して「離脱路」という)を区別する情報が登録されている。なお、高速道路と同様の意味で自動車専用道路という言葉が用いられる場合があるが、本実施形態では両者を区別せず高速道路という。
【0019】
GPS受信機24は、地球の周りを周回する好ましくは4つ以上のGPS衛星を捕捉して、各GPS衛星からの電波の到達時間に基づき、自車両の位置(緯度・経度・標高)を検出する。位置の知られた基準局が発信するFM放送の電波を利用して、GPSの計測結果の誤差を修正して高精度に自車両の位置を検出してもよい。
【0020】
メータパネル25は、逆走が検出されると警報音を吹鳴したり、警告ランプを点灯したり警告メッセージを表示する表示部である。ディスプレイ26はカーナビゲーションの道路地図を表示するための表示部であるが、ディスプレイ26が警告用のアイコンを表示したり警告メッセージを表示してもよい。また、制御部20は不図示のスピーカから警告メッセージを出力することができる。また、制御部20は、ヘッドアップディスプレイなどの表示部に警告メッセージや逆走を意味するアイコンを表示するなどして運転者に警告することもできる。なお、聴覚的な警告と視覚的な警告はいずれか一方のみ出力してもよい。
【0021】
また、制御部20は、CPUがプログラムを実行するか又はASIC等のハードウェアにより実装される、逆走判定部31、警告要求部32、自律航法部33及びマップマッチング部34を有する。逆走判定部31は、自車両が逆走するおそれがあるか否かを判定する。警告要求部32は、逆走のおそれがあると判定された場合にメータパネル25に警告を要求する。自律航法部33は、GPS受信機24が検出した自車両の位置情報を起点にして、ジャイロセンサ22が検出する自車両の進行方向に車速センサ21が検出する走行距離を累積して、自車両の位置を高精度に推定する。マップマッチング部34は、自車両の周囲の道路地図を利用して、推定された位置に対し最も確からしい道路に自車両の位置をマッチングする(マップマッチング)。マップマッチングの手法は種々あるが、例えば、自律航法により推定された位置から所定距離内のリンクを地図DB23から抽出し、自律航法により推定された位置の軌跡とリンクの方向の差異が最も少ないリンクにマッチングするなどの方法が知られている。
【0022】
次述するように、逆走判定部31はジャイロセンサ22が検出する旋回角度と反転判定閾値θ0とを比較することで逆走のおそれがあることを検出する。
【0023】
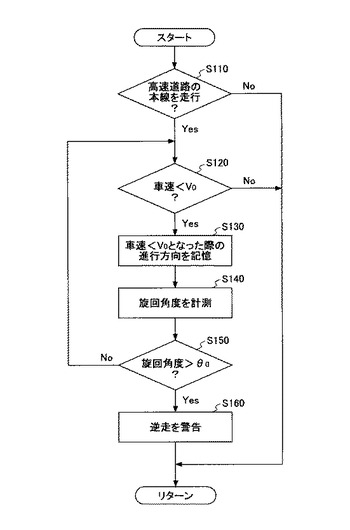
逆走警告装置100が逆走を検出する手順について図2のフローチャート図を用いて説明する。図2のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。
【0024】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S110)。なお、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。高速道路の本線を走行していない場合(S110のNo)、図2の処理はそのまま終了する。
【0025】
高速道路の本線を走行している場合(S110のYes)、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S120)。車速判定閾値V0は予め定められた定数であるが、Uターンするためには著しく車速を下げる必要があるため、この減速時の一般的な車速を車速判定閾値(例えば、V0=20〔km/h〕)とする。車速が車速判定閾値V0よりも小さくない場合(S10のNo)、図2の処理はそのまま終了する。
【0026】
車速が車速判定閾値V0よりも小さい場合(S120のYes)、逆走判定部31は車速が車速判定閾値V0未満となった時又はステップS20の判定時の進行方向を記憶する(S130)。したがって、車速が車速判定閾値V0よりも小さくなった際の進行方向がゼロ度(基準値)になる。なお、ステップS130の処理は、車速が継続して車速判定閾値V0よりも小さい間は1度のみ実行される。
【0027】
そして、ゼロ度とした進行方向を基準に自車両の旋回角度の計測を開始する(S140)。上述したように、ジャイロセンサ22の出力を時間積分することで旋回角度を検出できるので、例えば、微少時間毎のヨーレートを累積することで旋回角度が検出される。
【0028】
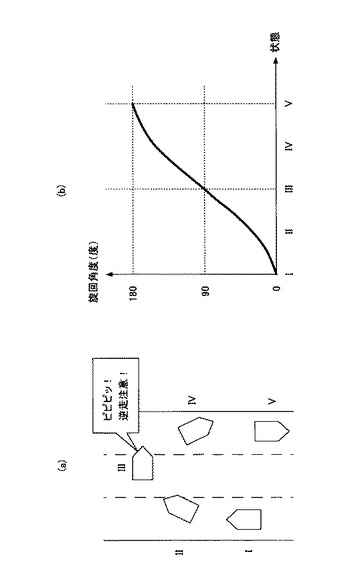
図3(a)は自車両がUターンする過程を模式的に示す図を、図3(b)は自車両のUターン過程における旋回角度の一例を、それぞれ示す。図3(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。したがって、図3(b)では状態「I」の旋回角度がゼロになっている。
【0029】
自車両がUターンを継続し、状態「II」を経て状態「III」となると自車両の車長方向はちょうど幅員方向を向くので、状態「III」では旋回角度が約90度である。さらに、自車両がUターンを継続し、状態「IV」を経て状態「V」となると自車両は車道の逆方向に反転するので、状態「V」では旋回角度が約180度となる。
【0030】
図2に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、旋回角度が反転判定閾値θ0を超えたか否かの判定を繰り返す(S150)。なお、旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図2の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0031】
反転判定閾値θ0を90度とすれば、図3(a)の状態「III」で自車両の逆走を検出することができる。旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図2の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0032】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は自車両が逆走の直前であると判定でき、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0033】
なお、逆走するおそれが必ずしも確実でなくても逆走の開始前に警告することが好ましいので、例えば反転判定閾値θ0を80度程度に設定しておいてもよい。高速道路の本線において所定速度以下で旋回角度が80度以上になることは希と考えてよく、仮に単なる車線変更を逆走のおそれ有りと誤判定しても不要警報が発せられるおそれは少ない。また、逆走のおそれがあることを確実に検出するため、例えば反転判定閾値θ0を100度に設定しておいてもよい。
【0034】
すでに出願した逆走警告装置100を含め本実施形態の逆走警告装置100は、高速道路の本線であることを検出し高速道路の本線を走行中の場合にのみ車速及び旋回速度から逆走のおそれがあることを検出するので、逆走の開始前又は逆走開始直後に運転者に警告することができ、高速道路の逆走を確実に防止することができる。
【0035】
なお、高速道路にある側線やパーキングエリアでは逆走のおそれがあるか否かを判定しないので、湾曲した側線やパーキングエリアにおいて、低速な状態で旋回角度が所定値を超えても逆走のおそれがあると誤判定することもない。
【0036】
〔逆走警告装置100による逆走の誤判定の防止について〕
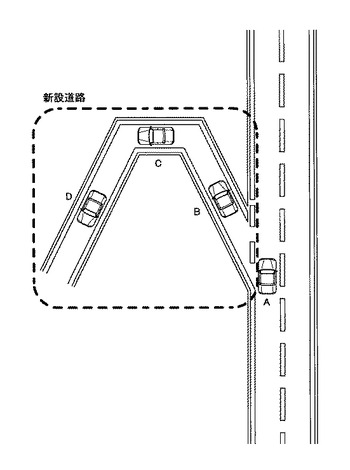
図4、5は、逆走警告装置100による逆走の誤判定を説明する図の一例である。まず、図4は、新設された離脱路を走行している車両を模式的に示す図である。車両はインターチェンジの一部である離脱路を走行しているが、この離脱路は新設された道路である。このため、地図DB23にはこの離脱路の道路情報は記憶されていない。逆走警告装置100は、車両が本線以外の道路を走行中には逆走を検出しないが、新設された離脱路であるため、逆走警告装置100は、車両が本線以外の道路を走行中であるとは検出できない。このため、逆走警告装置100は、旋回角度が反転判定閾値θ0を超えると、逆走するおそれがあると誤判定してしまう。
【0037】
上述したように、制御部20は、自律航法により推定された位置に対し最も確からしい道路に自車両の位置をマッチングする。制御部20は、このマップマッチングにより自車両の位置が道路上に一致するように補正している。
【0038】
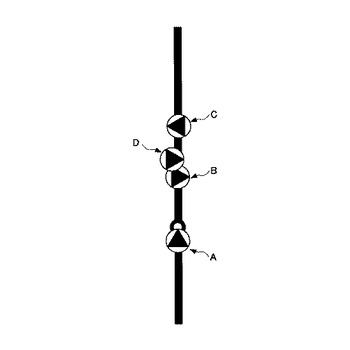
図5は、マップマッチング部34が地図DB23に記憶されている道路から最も確からしい道路に車両の位置をマッチングした状態を説明する図の一例である。図4のA〜Dと図5のA〜Dは対応している。新設された離脱路が地図DB23に登録されていない場合、マップマッチング部34は、地図DB23に記憶されている道路から最も確からしい道路を選ぶか、又は、マッチング自体を行わない。図5は前者の例を示し、マップマッチング部34は、新設された離脱路の次に位置や走行方向が合致する道路に自車位置をマッチングしてしまっている。このように、新設された離脱路が地図DB23に登録されていない場合、逆走警告装置100は、車両が本線以外の道路を走行中であるとは検出できないことが多い。
【0039】
図5のように、新設した離脱路を走行している車両が本線にマッチングされていると、旋回角度が反転判定閾値θ0を超えた場合(状態D)、逆走警告装置100は車両が本線を走行中であると誤判定しているため、警告要求部32は状態Dで運転者に警告してしまう。
【0040】
そこで、本実施形態の逆走判定部31は、自律航法部33が推定した自車位置を用いて誤判定を防止する。
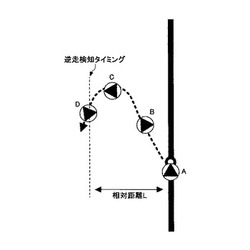
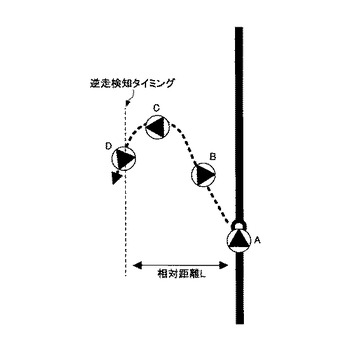
図6は、誤判定の防止を説明する図の一例である。逆走判定部31は旋回角度を監視して、図4又は図5の状態A(判定開始位置)を基準に、図4又は図5の状態D(すなわち、旋回角度>反転判定閾値θ0)となると、自律航法部33が推定した状態Dとなった判定終了位置から、本線までの相対距離Lを算出する。逆走判定部31は、例えば、判定終了位置から本線のリンクまで垂線を下ろし、垂線と本線のリンクの交点と、判定終了位置の距離を相対距離Lとする。
【0041】
また、このように算出するのでなく、ジャイロセンサ22と車速センサ21から相対距離Lを求めてもよい。判定開始位置における旋回角度をゼロ、かつ、車速センサ21が検出する走行距離をゼロとして、車速センサ21が検出した走行距離から、ジャイロセンサ22が検出した旋回角度を利用して走行距離の90度成分(本線から離れる方向の成分)を取り出す。すなわち、逆走判定部31は、αをヨー角として、刻々と変化する走行距離×sin・αを算出し、累積していく。状態Dとなった時の走行距離×sin・αの累積値が相対距離Lである。
【0042】
また、判定開始位置から判定終了位置までの走行軌跡をトレースした距離から相対距離Lを求めてもよい。離脱路を走行して旋回角度>反転判定閾値θ0となる場合、走行軌跡は1/4の円弧〜半円を描く。例えば、半円の長さはπr(r:円の半径)=「走行軌跡をトレースした距離」なので、「走行軌跡をトレースした距離」をπで割ると円の半径rが分かる。逆走判定部31は半径rを2倍程度した直径を相対距離Lとする。
【0043】
相対距離Lが十分に大きい場合、マップマッチング部34のマッチング結果が、車両が本線上にあることを示していても、車両は新設された離脱路(例えば、ランプ等)を走行している可能性が高いと考えられる。このように考えてよいのは、インターチェンジなどの新設道路のカーブRは大きめに設定されているためである。
【0044】
実際には、このカーブRにより定まる回転直径が、高速道路の本線の片側の道路幅よりも大きければ、車両が車両は新設された道路を走行している可能性が高いとしてよい。以上から、逆走判定部31は、次式から逆走防止閾値Ldを算出する。
逆走防止閾値Ld=車線数×一般的な高速道路の本線の道路幅(例えば、3.5m)
車線数は、地図DB23に登録されている。道路幅はこのように一般的な値を用いてもよいし、地図DB23に登録されている場合にはその値を用いることでより正確な逆走防止閾値Ldを算出可能となる。
【0045】
以上から、逆走判定部31は次の2つの条件が成立した場合に、車両が逆走するおそれがあると判定する。
【0046】
旋回角度>反転判定閾値θ0
かつ
相対距離L≦逆走防止閾値Ld
<動作手順>
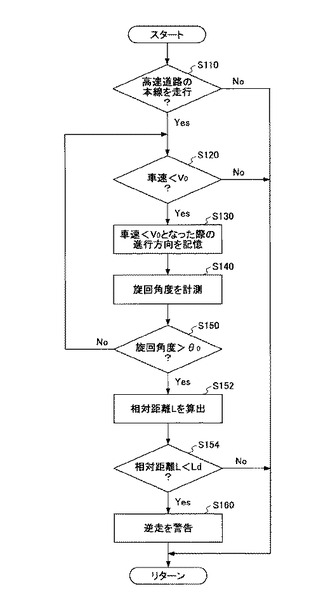
図7は、誤判定を防止可能な逆走警告装置100が逆走を検出する手順を説明するフローチャート図の一例である。図6のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。図6においてステップS150までの処理は図2と同様なので説明を省略する。
【0047】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は相対距離Lを算出する(S152)。そして、逆走判定部31は、相対距離Lが逆走防止閾値Ld以下か否かを判定する(S154)。
【0048】
相対距離Lが逆走防止閾値Ld以下の場合(S154のYes)、車両は高速道路の本線内をUターンしている可能性が高いので、逆走判定部31は自車両が逆走の直前であると判定して、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0049】
相対距離Lが逆走防止閾値Ld以下でない場合(S154のNo)、車両は高速道路の本線内以外の離脱路を走行している可能性が高いので、逆走判定部31は警告要求部32に警告を要求しない。
【0050】
このように判定することで、高速道路から新設されたランプなどを走行した場合、逆走警告装置100が逆走を誤判定することを防止できる。
【符号の説明】
【0051】
20 制御部
21 車速センサ
22 ジャイロセンサ
23 地図DB
24 GPS受信機
25 メータパネル
26 ディスプレイ
31 逆走判定部
32 警告要求部
33 自律航法部
34 マップマッチング部
100 逆走警告装置
【技術分野】
【0001】
本発明は、走行方向が定められた道路を逆走するおそれがある場合、乗員に警告する逆走警告装置に関する。
【背景技術】
【0002】
車両は道路の右側又は左側に寄って走行することが各国毎に法令等で義務づけられている。こうすることで、各車両が対向車と衝突せず円滑に走行することができる。しかし、高速道路のパーキングエリアから本線に出る際や、片側の走行車線の数が多い道路をUターンしたりこの道路に向けて右折するような場合に、運転者が気付かないうちに対向車線を逆走するおそれがある。
【0003】
そこで、このような逆走を防止する技術が提案されている(例えば、特許文献1参照。)。特許文献1には、カメラが撮影した画像から中央分離帯を検出した場合、道路標識が道路の右側又は左側に位置している道路標識の大きさが正常走行時の大きさと異なるか否かにより逆走を検出する逆走検出装置が開示されている。また、特許文献1に記載の逆走検出装置は、中央分離帯を検出しない場合、自車位置の右側と左側の車線数をそれぞれ検出し、自車位置より右側の車線数が左側の車線数より少ない場合、車両が逆走していると判別する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−140883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された逆走検出装置はフロントカメラが撮影する画像から道路標識が検出されないと逆走を検出できないので、逆走の開始直後には逆走を検出できないおそれがあるという問題がある。また、フロントカメラの普及率は低く、また、カラーカメラである必要があるなど、制約が多い。
【0006】
そこで本出願人は、上記課題に鑑み、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置を既に提案している。
【0007】
しかし、本出願人が提案した逆走警告装置は、希な状況であるが、逆走するおそれがない状況において逆走するおそれがあると誤判定する場合があることが判明した。
【0008】
本発明は、上記課題に鑑み、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題に鑑み、本発明は、所定以下の車速で逆走のおそれを検出する逆走警告装置であって、自律航法により自車位置を検出する自律航法手段と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段と、を有することを特徴とする。
【発明の効果】
【0010】
逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】逆走警告装置のブロック図の一例である。
【図2】逆走警告装置が逆走を検出する手順を説明するフローチャート図の一例である。
【図3】自車両がUターンする過程を模式的に示す図、Uターン過程における旋回角度の一例を、それぞれ示す図である。
【図4】新設されたランプを走行している車両を模式的に示す図の一例である。
【図5】マップマッチング部が地図DBに記憶されている道路から最も確からしい道路に車両の位置をマッチングした状態を説明する図の一例である。
【図6】誤判定の防止を説明する図の一例である。
【図7】誤判定を防止可能な逆走警告装置が逆走を検出する手順を説明するフローチャート図の一例である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について図面を参照しながら説明する。
まず、本出願人がすでに出願した逆走警告装置について説明し、その後、本実施形態の逆走警告装置100による逆走の誤判定の防止について説明する。
【0013】
〔逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置100について〕
図1は、本実施形態の逆走警告装置100のブロック図の一例である。すでに出願した逆走警告装置のブロック図は、本実施形態の逆走警告装置100のブロック図により包含されるので、ブロック図は共通にして説明する。なお、より詳細には、すでに出願した逆走警告装置と本実施形態の逆走警告装置100とは逆走判定部31の機能が異なる。
【0014】
逆走警告装置100は制御部20により制御され、制御部20には車速センサ21、ジャイロセンサ22、地図DB(Data Base)23、GPS(Global Positioning System)受信機24、メータパネル25及びディスプレイ26が、CAN(Controller Area Network)等の車載LANや専用線を介して接続されている。制御部20はCPU、RAM、ROM、ASIC(Application Specific Integrated Circuit)及び入出力インターフェイスを備えたコンピュータ等により構成され、例えば、ナビゲーションシステムを制御するナビECU(Electronic Control Unit)が兼用することができる。ナビECUは自車両の位置や車速を検出しているので、逆走警告装置100の実現に要請される機能を備えており、兼用することで車載スペースを節約し重量増を抑制することができる。
【0015】
車速センサ21は、例えば、自車両の各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルス波形に整形して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径や凸部の間隔に応じて定めた補正値を乗じれば車速が得られる。
【0016】
ジャイロセンサ22は、例えばマイクロマシニングで形成された震動片型ジャイロセンサであり、自車両の旋回速度に応じて生じるコリオリ力を電極間の変化による電圧信号として取り出す。旋回速度すなわちヨーレートを時間に対し積分するとヨー角が得られるので、このヨー角を時間積分することで旋回角度を検出することができる。ジャイロセンサ22は、旋回角度だけでなくピッチング方向の進行方向を検出可能な3Dジャイロであってもよい。
【0017】
地図DB23はHDD(Hard Disk Drive)やフラッシュメモリ等で構成され、緯度や経度などの位置情報に対応づけて道路地図情報を記憶している。道路地図情報は、道路を構成するリンクのリンク情報と、リンクとリンクを接続するノード(交差点やリンク上の所定間隔毎の点)のノード情報とを対応づけたテーブル状のデータベースである。リンク情報にはリンク長、幅員、接続ノード、接続方向等が含まれるため、道路地図情報により実際の道路網が再現される。また、地図DB23は、高速道路、一般道などの道路種別毎に道路地図情報を記憶している。このような記憶構造により、制御部は道路種別毎に道路地図を描画できるので地図DB23へのアクセスが高速になる。
【0018】
また、地図DB23には、高速道路であれば本線、ランプ、分離線又は合流線等の側線及びパーキングエリア(以下、総称して「離脱路」という)を区別する情報が登録されている。なお、高速道路と同様の意味で自動車専用道路という言葉が用いられる場合があるが、本実施形態では両者を区別せず高速道路という。
【0019】
GPS受信機24は、地球の周りを周回する好ましくは4つ以上のGPS衛星を捕捉して、各GPS衛星からの電波の到達時間に基づき、自車両の位置(緯度・経度・標高)を検出する。位置の知られた基準局が発信するFM放送の電波を利用して、GPSの計測結果の誤差を修正して高精度に自車両の位置を検出してもよい。
【0020】
メータパネル25は、逆走が検出されると警報音を吹鳴したり、警告ランプを点灯したり警告メッセージを表示する表示部である。ディスプレイ26はカーナビゲーションの道路地図を表示するための表示部であるが、ディスプレイ26が警告用のアイコンを表示したり警告メッセージを表示してもよい。また、制御部20は不図示のスピーカから警告メッセージを出力することができる。また、制御部20は、ヘッドアップディスプレイなどの表示部に警告メッセージや逆走を意味するアイコンを表示するなどして運転者に警告することもできる。なお、聴覚的な警告と視覚的な警告はいずれか一方のみ出力してもよい。
【0021】
また、制御部20は、CPUがプログラムを実行するか又はASIC等のハードウェアにより実装される、逆走判定部31、警告要求部32、自律航法部33及びマップマッチング部34を有する。逆走判定部31は、自車両が逆走するおそれがあるか否かを判定する。警告要求部32は、逆走のおそれがあると判定された場合にメータパネル25に警告を要求する。自律航法部33は、GPS受信機24が検出した自車両の位置情報を起点にして、ジャイロセンサ22が検出する自車両の進行方向に車速センサ21が検出する走行距離を累積して、自車両の位置を高精度に推定する。マップマッチング部34は、自車両の周囲の道路地図を利用して、推定された位置に対し最も確からしい道路に自車両の位置をマッチングする(マップマッチング)。マップマッチングの手法は種々あるが、例えば、自律航法により推定された位置から所定距離内のリンクを地図DB23から抽出し、自律航法により推定された位置の軌跡とリンクの方向の差異が最も少ないリンクにマッチングするなどの方法が知られている。
【0022】
次述するように、逆走判定部31はジャイロセンサ22が検出する旋回角度と反転判定閾値θ0とを比較することで逆走のおそれがあることを検出する。
【0023】
逆走警告装置100が逆走を検出する手順について図2のフローチャート図を用いて説明する。図2のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。
【0024】
高速道路に進入すると、逆走判定部31は自車両の位置から高速道路の本線を走行しているか否かを判定する(S110)。なお、路側に敷設された通信部から高速道路の本線を走行中である旨の情報を受信することで判定してもよい。高速道路の本線を走行していない場合(S110のNo)、図2の処理はそのまま終了する。
【0025】
高速道路の本線を走行している場合(S110のYes)、逆走判定部31は車速センサ21が検出する車速が車速判定閾値V0よりも小さいか否かを判定する(S120)。車速判定閾値V0は予め定められた定数であるが、Uターンするためには著しく車速を下げる必要があるため、この減速時の一般的な車速を車速判定閾値(例えば、V0=20〔km/h〕)とする。車速が車速判定閾値V0よりも小さくない場合(S10のNo)、図2の処理はそのまま終了する。
【0026】
車速が車速判定閾値V0よりも小さい場合(S120のYes)、逆走判定部31は車速が車速判定閾値V0未満となった時又はステップS20の判定時の進行方向を記憶する(S130)。したがって、車速が車速判定閾値V0よりも小さくなった際の進行方向がゼロ度(基準値)になる。なお、ステップS130の処理は、車速が継続して車速判定閾値V0よりも小さい間は1度のみ実行される。
【0027】
そして、ゼロ度とした進行方向を基準に自車両の旋回角度の計測を開始する(S140)。上述したように、ジャイロセンサ22の出力を時間積分することで旋回角度を検出できるので、例えば、微少時間毎のヨーレートを累積することで旋回角度が検出される。
【0028】
図3(a)は自車両がUターンする過程を模式的に示す図を、図3(b)は自車両のUターン過程における旋回角度の一例を、それぞれ示す。図3(a)では車速が車速判定閾値V0よりも小さくなった時を状態「I」で示す。したがって、図3(b)では状態「I」の旋回角度がゼロになっている。
【0029】
自車両がUターンを継続し、状態「II」を経て状態「III」となると自車両の車長方向はちょうど幅員方向を向くので、状態「III」では旋回角度が約90度である。さらに、自車両がUターンを継続し、状態「IV」を経て状態「V」となると自車両は車道の逆方向に反転するので、状態「V」では旋回角度が約180度となる。
【0030】
図2に戻り、逆走判定部31は車速が車速判定閾値V0を超えるまでの間、旋回角度が反転判定閾値θ0を超えたか否かの判定を繰り返す(S150)。なお、旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図2の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0031】
反転判定閾値θ0を90度とすれば、図3(a)の状態「III」で自車両の逆走を検出することができる。旋回角度が反転判定閾値θ0を超えるまでの間に、車速が車速判定閾値V0以上となった場合、図2の処理はそのまま終了するので、例えば、渋滞に巻き込まれ旋回角度が反転判定閾値θ0を超えるまでに車速が増大すれば、逆走のおそれがあると誤判定することを防止できる。
【0032】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は自車両が逆走の直前であると判定でき、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0033】
なお、逆走するおそれが必ずしも確実でなくても逆走の開始前に警告することが好ましいので、例えば反転判定閾値θ0を80度程度に設定しておいてもよい。高速道路の本線において所定速度以下で旋回角度が80度以上になることは希と考えてよく、仮に単なる車線変更を逆走のおそれ有りと誤判定しても不要警報が発せられるおそれは少ない。また、逆走のおそれがあることを確実に検出するため、例えば反転判定閾値θ0を100度に設定しておいてもよい。
【0034】
すでに出願した逆走警告装置100を含め本実施形態の逆走警告装置100は、高速道路の本線であることを検出し高速道路の本線を走行中の場合にのみ車速及び旋回速度から逆走のおそれがあることを検出するので、逆走の開始前又は逆走開始直後に運転者に警告することができ、高速道路の逆走を確実に防止することができる。
【0035】
なお、高速道路にある側線やパーキングエリアでは逆走のおそれがあるか否かを判定しないので、湾曲した側線やパーキングエリアにおいて、低速な状態で旋回角度が所定値を超えても逆走のおそれがあると誤判定することもない。
【0036】
〔逆走警告装置100による逆走の誤判定の防止について〕
図4、5は、逆走警告装置100による逆走の誤判定を説明する図の一例である。まず、図4は、新設された離脱路を走行している車両を模式的に示す図である。車両はインターチェンジの一部である離脱路を走行しているが、この離脱路は新設された道路である。このため、地図DB23にはこの離脱路の道路情報は記憶されていない。逆走警告装置100は、車両が本線以外の道路を走行中には逆走を検出しないが、新設された離脱路であるため、逆走警告装置100は、車両が本線以外の道路を走行中であるとは検出できない。このため、逆走警告装置100は、旋回角度が反転判定閾値θ0を超えると、逆走するおそれがあると誤判定してしまう。
【0037】
上述したように、制御部20は、自律航法により推定された位置に対し最も確からしい道路に自車両の位置をマッチングする。制御部20は、このマップマッチングにより自車両の位置が道路上に一致するように補正している。
【0038】
図5は、マップマッチング部34が地図DB23に記憶されている道路から最も確からしい道路に車両の位置をマッチングした状態を説明する図の一例である。図4のA〜Dと図5のA〜Dは対応している。新設された離脱路が地図DB23に登録されていない場合、マップマッチング部34は、地図DB23に記憶されている道路から最も確からしい道路を選ぶか、又は、マッチング自体を行わない。図5は前者の例を示し、マップマッチング部34は、新設された離脱路の次に位置や走行方向が合致する道路に自車位置をマッチングしてしまっている。このように、新設された離脱路が地図DB23に登録されていない場合、逆走警告装置100は、車両が本線以外の道路を走行中であるとは検出できないことが多い。
【0039】
図5のように、新設した離脱路を走行している車両が本線にマッチングされていると、旋回角度が反転判定閾値θ0を超えた場合(状態D)、逆走警告装置100は車両が本線を走行中であると誤判定しているため、警告要求部32は状態Dで運転者に警告してしまう。
【0040】
そこで、本実施形態の逆走判定部31は、自律航法部33が推定した自車位置を用いて誤判定を防止する。
図6は、誤判定の防止を説明する図の一例である。逆走判定部31は旋回角度を監視して、図4又は図5の状態A(判定開始位置)を基準に、図4又は図5の状態D(すなわち、旋回角度>反転判定閾値θ0)となると、自律航法部33が推定した状態Dとなった判定終了位置から、本線までの相対距離Lを算出する。逆走判定部31は、例えば、判定終了位置から本線のリンクまで垂線を下ろし、垂線と本線のリンクの交点と、判定終了位置の距離を相対距離Lとする。
【0041】
また、このように算出するのでなく、ジャイロセンサ22と車速センサ21から相対距離Lを求めてもよい。判定開始位置における旋回角度をゼロ、かつ、車速センサ21が検出する走行距離をゼロとして、車速センサ21が検出した走行距離から、ジャイロセンサ22が検出した旋回角度を利用して走行距離の90度成分(本線から離れる方向の成分)を取り出す。すなわち、逆走判定部31は、αをヨー角として、刻々と変化する走行距離×sin・αを算出し、累積していく。状態Dとなった時の走行距離×sin・αの累積値が相対距離Lである。
【0042】
また、判定開始位置から判定終了位置までの走行軌跡をトレースした距離から相対距離Lを求めてもよい。離脱路を走行して旋回角度>反転判定閾値θ0となる場合、走行軌跡は1/4の円弧〜半円を描く。例えば、半円の長さはπr(r:円の半径)=「走行軌跡をトレースした距離」なので、「走行軌跡をトレースした距離」をπで割ると円の半径rが分かる。逆走判定部31は半径rを2倍程度した直径を相対距離Lとする。
【0043】
相対距離Lが十分に大きい場合、マップマッチング部34のマッチング結果が、車両が本線上にあることを示していても、車両は新設された離脱路(例えば、ランプ等)を走行している可能性が高いと考えられる。このように考えてよいのは、インターチェンジなどの新設道路のカーブRは大きめに設定されているためである。
【0044】
実際には、このカーブRにより定まる回転直径が、高速道路の本線の片側の道路幅よりも大きければ、車両が車両は新設された道路を走行している可能性が高いとしてよい。以上から、逆走判定部31は、次式から逆走防止閾値Ldを算出する。
逆走防止閾値Ld=車線数×一般的な高速道路の本線の道路幅(例えば、3.5m)
車線数は、地図DB23に登録されている。道路幅はこのように一般的な値を用いてもよいし、地図DB23に登録されている場合にはその値を用いることでより正確な逆走防止閾値Ldを算出可能となる。
【0045】
以上から、逆走判定部31は次の2つの条件が成立した場合に、車両が逆走するおそれがあると判定する。
【0046】
旋回角度>反転判定閾値θ0
かつ
相対距離L≦逆走防止閾値Ld
<動作手順>
図7は、誤判定を防止可能な逆走警告装置100が逆走を検出する手順を説明するフローチャート図の一例である。図6のフローチャート図は、例えば車両が高速道路に進入するとスタートし、所定のサイクル時間毎に繰り返し実行される。図6においてステップS150までの処理は図2と同様なので説明を省略する。
【0047】
旋回角度がθ0を超えた場合(S150のYes)、逆走判定部31は相対距離Lを算出する(S152)。そして、逆走判定部31は、相対距離Lが逆走防止閾値Ld以下か否かを判定する(S154)。
【0048】
相対距離Lが逆走防止閾値Ld以下の場合(S154のYes)、車両は高速道路の本線内をUターンしている可能性が高いので、逆走判定部31は自車両が逆走の直前であると判定して、警告要求部32により聴覚又は視覚の少なくとも一方により運転者に警告する(S160)。
【0049】
相対距離Lが逆走防止閾値Ld以下でない場合(S154のNo)、車両は高速道路の本線内以外の離脱路を走行している可能性が高いので、逆走判定部31は警告要求部32に警告を要求しない。
【0050】
このように判定することで、高速道路から新設されたランプなどを走行した場合、逆走警告装置100が逆走を誤判定することを防止できる。
【符号の説明】
【0051】
20 制御部
21 車速センサ
22 ジャイロセンサ
23 地図DB
24 GPS受信機
25 メータパネル
26 ディスプレイ
31 逆走判定部
32 警告要求部
33 自律航法部
34 マップマッチング部
100 逆走警告装置
【特許請求の範囲】
【請求項1】
所定以下の車速で逆走のおそれを検出する逆走警告装置であって、
自律航法により自車位置を検出する自律航法手段と、
車線区分線に対する自車両の車長方向の角度を検出する角度検出手段と、
前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段と、
を有することを特徴とする逆走警告装置。
【請求項1】
所定以下の車速で逆走のおそれを検出する逆走警告装置であって、
自律航法により自車位置を検出する自律航法手段と、
車線区分線に対する自車両の車長方向の角度を検出する角度検出手段と、
前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段と、
を有することを特徴とする逆走警告装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−95960(P2011−95960A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−248624(P2009−248624)
【出願日】平成21年10月29日(2009.10.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月29日(2009.10.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]