
逆走防止装置

【課題】逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供する。
【解決手段】ドップラーモジュール11は、検知領域にマイクロ波を放射し、車両からの反射波よりドップラー周波数を検出する。進行方向識別回路16は2つのドップラー周波数の位相差から車両の走行方向を識別する。カウンタ17bは、進行方向識別回路16の出力信号に基づき逆走車両を検出する。測定回路20は、ドップラーモジュール11及びカウンタ17aの出力信号に基づき、検知領域の車両走行方向の距離を算出する。
【解決手段】ドップラーモジュール11は、検知領域にマイクロ波を放射し、車両からの反射波よりドップラー周波数を検出する。進行方向識別回路16は2つのドップラー周波数の位相差から車両の走行方向を識別する。カウンタ17bは、進行方向識別回路16の出力信号に基づき逆走車両を検出する。測定回路20は、ドップラーモジュール11及びカウンタ17aの出力信号に基づき、検知領域の車両走行方向の距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば有料道路の進入路等の一方通行路を車両が逆走することを防止する逆走防止装置に関する。
【背景技術】
【0002】
例えば有料道路のサービスエリア(以下、SAと称す)や、パーキングエリア(以下、PAと称す)において、SAやPAの入口と出口を誤認し、SAやPAへの進入路を逆走し、SAやPAに進入して来る車両と衝突するという事故が発生している。
【0003】
従来、上記進入路のような一方通行路を逆走する車両を例えばマイクロ波により検出し、逆走車両に逆走を警告する逆走防止装置が開発されている(例えば、特許文献1、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−182256号公報
【特許文献2】特開2007−140757号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来の逆走防止装置において、マイクロ波を放射して逆走車両を検知する検知装置をSAやPAの進入路に設置する際、検知装置から放射されるマイクロ波の放射範囲を正確に知ることが困難であった。また、進入路及びSAやPAの構造が様々であり、SAやPAに対する進入路の角度も様々である。このため、検知装置から放射されるマイクロ波の一部がSAやPA内に漏れていることがあり、検知装置がSAやPA内を走行する車両に反応し、進入路に逆走車両がないにも拘わらず、逆走車両有りと判断することがあった。このように、検知装置により誤検知が生じた場合、進入路に設置された報知器から進入路を走行中の正規の車両に誤報が報知されるという不都合があった。
【0006】
また、検知装置は、気象条件によっても誤検知が生じることがあり、例えば豪雨時、検知装置が豪雨に反応し、逆走車両がないにも拘わらず、逆走車両有りと判断することがあった。
【0007】
本発明は、逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明の逆走防止装置の態様は、一方通行路の出口近傍に設置され、前記一方通行路の検知領域に電波を放射し、前記検知領域内の車両からの反射波を受信する送受信部と、前記送受信部から出力される一対の信号の位相を検知することにより、前記一方通行路を走行する前記車両の進行方向を識別する識別部と、前記送受信部から出力される一対の信号に基づき、前記車両の速度を測定する第1の測定部と、前記識別部の出力信号に基づき、前記車両が検知されている時間を測定する第2の測定部と、前記第1、第2の測定部の出力信号に基づき、前記検知領域の車両走行方向の距離を測定する第3の測定部とを具備することを特徴とする。
【発明の効果】
【0009】
本発明は、逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供する。
【図面の簡単な説明】
【0010】
【図1】本発明の逆走防止装置の第1の実施形態を示す回路構成図。
【図2】本発明の第1の実施形態のシステム構成を示す図。
【図3】検知領域の範囲を説明するために示す図。
【図4】本発明の第2の実施形態を示す構成図。
【図5】本発明の第2の実施形態の回路構成の要部を示す図。
【図6】本発明の第3の実施形態を示すシステム構成図。
【図7】本発明の第4の実施形態を示す一部断面とした側面図。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を参照して説明する。
【0012】
(第1の実施形態)
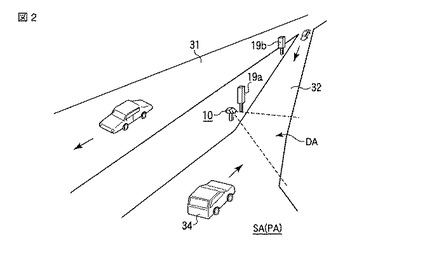
図2は逆走防止装置の設置状態を概略的に示している。
【0013】
図2において、有料道路の本線31とSA(又はPA)の間には、本線31から分岐されSAに通じる一方通行路としての進入路32が設けられている。この進入路32のSA側(以下、出口と称す)に、検知装置10が設置されている。この検知装置10は、マイクロ波を用いて進入路32を逆走しようとする車両34を検出する。すなわち、この検知装置10はマイクロ波を検知領域DAに送信し、検知領域DAに進入した車両34からの反射波を受信する。このため、検知領域DAは、進入路32を横断し、進入路32からSA(又はPA)側に向けて例えば斜めに設定されている。
【0014】
検知装置10は、有線又は無線により報知装置19に接続されている。検知装置10と報知装置19との間の距離は、進入路32の入口から出口までの距離や、形状により異なるが、逆走車両及び順方向に走行する車両(順走車両)に短時間に警報を発生できるよう最適位置に設置される。報知装置19a、19bは、例えば警告を促す文字情報を表示する表示装置や、回転灯により構成されている。検知装置10により、逆走車両が検知されると、検知装置10の出力信号により報知装置19a、19bが駆動される。報知装置19aは、逆走車両に警告を報知し、報知装置19bは、順走車両に警告を報知する。
【0015】
図1は、本発明の逆走防止装置の第1の実施形態を示している。
【0016】
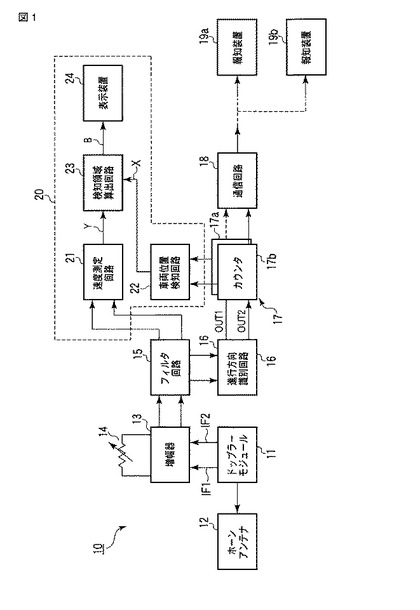
検知装置10は、例えばドップラーモジュール11、ホーンアンテナ12、増幅器13、可変抵抗14、フィルタ回路15、進行方向識別回路16、カウンタ17、通信回路18により構成されている。このうち、ドップラーモジュール11、増幅器13、可変抵抗14、進行方向識別回路16は、上記特許文献2と同様の構成である。すなわち、ドップラーモジュール11は、特定小電力無線機により構成され、例えば24GHz帯(Kバンド)のマイクロ波を発生し、例えばホーンアンテナ12に供給する。ホーンアンテナ12は、検知領域DAにマイクロ波を放射する。検知領域DA内の車両から反射された反射波は、ホーンアンテナ12により受信され、ドップラーモジュール11に供給される。ドップラーモジュール11は、周知のドップラーセンサであり、受信された信号を検波し、送信周波数と受信周波数の位相差からドップラー周波数を検出する。このドップラーモジュール11は、ドップラー周波数に応じて、位相の異なる一対の信号IF1、IF2を出力する。この信号IF1、IF2は、検知領域調整部としての増幅器13に供給される。
【0017】
増幅器13は、信号IF1、IF2をそれぞれ増幅する2系統の例えば可変利得増幅器により構成され、可変抵抗14の抵抗値を変えることにより、これら可変利得増幅器の利得が調整可能とされている。この増幅器13の利得を変えることにより、車両の検知距離を例えば最大30mの範囲内で、例えば5m間隔で調整可能とされている。この増幅器13の出力信号は、フィルタ15に供給される。このフィルタ15は、例えば信号IF1、IF2を通過する帯域通過フィルタにより構成され、このフィルタ15を通過した信号IF1、IF2は、進行方向識別回路16に供給される。
【0018】
進行方向識別回路16は、特許文献2に記載されるように、例えば2つのフリップフロップ回路により構成され、フィルタ15を通過した信号IF1、IF2のうち、信号IF1は、一方のフリップフロップ回路のクロック信号入力端と、フリップフロップ回路のデータ入力端及びクリア信号入力端に供給され、信号IF2は、フリップフロップ回路のクロック信号入力端と、他方のフリップフロップ回路のデータ入力端及びクリア信号入力端に供給される。さらに、両フリップフロップ回路のプリセット信号入力端子には、例えば電源電圧が供給されている。
【0019】
上記構成において、ドップラーモジュール11の出力信号IF1、IF2は、信号IF1が信号IF2より位相が進んでいる場合、車両が検知装置10から離れる方向(順走方向)に走行していることを示し、信号IF2が信号IF1より位相が進んでいる場合、車両が検知装置10に接近する方向(逆走方向)に走行していることを示している。
【0020】
信号IF1が、信号IF2より進んでいる場合、一方のフリップフロップ回路の出力端より信号OUT1が出力され、信号IF2が、信号IF1より進んでいる場合、他方のフリップフロップ回路の出力端より出力信号OUT2が出力される。この信号OUT2は、逆走を示している。
【0021】
進行方向識別回路16の出力信号は、カウンタ17を介して通信回路18に供給される。カウンタ17は、例えば進行方向識別回路16から供給される信号OUT1、OUT2をそれぞれカウントする2つのカウンタ17a、17bにより構成されている。これらカウンタ17a、17bは、信号OUT1、OUT2の数を一定時間それぞれカウントする。すなわち、ドップラーモジュール11から出力される信号IF1、IF2は、車両の走行速度に応じて周波数が変化する。つまり、車両の走行速度が速い場合、信号IF1、IF2の周波数が高くなり、走行速度が遅い場合、周波数が低くなる。このため、信号IF1、IF2の周波数が高い場合、一定時間内に発生される信号OUT1、OUT2の数が増加し、信号IF1、IF2の周波数が低い場合、一定時間内に発生される信号OUT1、OUT2の数が減少する。カウンタ17bは、一定時間、例えば数十msの間、信号OUT2をカウントし、オーバーフローした場合、パルス信号を出力する。このような構成とすることにより、例えば時速6km以下の移動物体の場合、カウンタ17bがオーバーフローしない。したがって、時速6km以下の移動物体は、車両以外のノイズとして除去でき、誤検知を防止できる。
【0022】
信号OUT2をカウントするカウンタ17bから出力されたパルス信号、すなわち、逆走車両を検知したことを示す信号は、通信回路18に供給される。通信回路18は、カウンタ17の出力信号に基づき、報知装置19a、19bを起動させる。報知装置19a、19bは通信回路18からの信号に従って、表示装置や回転灯を駆動し、逆走車両、及び順走車両に対して警告を行う。
【0023】
一方、検知装置10は、誤検知を防止するため、マイクロ波の到達範囲を測定する測定装置20を有している。この測定装置20は、例えば速度測定回路21、車両位置検知回路22、検知領域算出回路23、表示装置24により構成されている。
【0024】
速度測定回路21は、例えば周波数カウンタにより構成され、フィルタ15を通過した例えば信号IF1を一定時間カウントし、周波数を車両の走行速度に変換する。
【0025】
また、車両位置検知回路22は、検知領域DA内を走行する車両の移動時間を検知する。すなわち、車両位置検知回路22は、例えばカウンタ17bから出力される信号OUT2をカウントするカウンタを含み、車両の移動時間をカウント値として検知する。車両位置検知回路22の構成はこれに限定されるものではない。カウンタ17bから出力される信号OUT2は、連続した信号群である。例えば単安定マルチバイブレータにより、この信号群の最初の信号の立ち上がりから一定時間(例えば50ms)ハイレベルを維持する。この間に次の信号が入力された場合、単安定マルチバイブレータにより、その信号の立ち上がりからさらに一定時間(例えば50ms)ハイレベルを維持する。このハイレベルの期間をカウンタによりカウントすることによっても車両の移動時間を測定することが可能である。
【0026】
車両位置検知回路22の出力信号X及び速度測定回路21の出力信号Yは、検知領域算出回路23に供給される。検知領域算出回路23は、車両位置検知回路22の出力信号X及び速度測定回路21の出力信号Yに基づき、次式から検知領域DAにおけるマイクロ波の到達範囲(距離B)を算出する。
【0027】
B=Y×1000÷3600×X B:(m),Y:(km/h),X:(s)
この算出された距離Bは、表示装置24に表示される。
【0028】
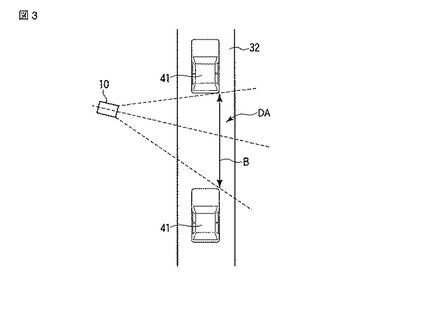
図3は、検知領域と車両の関係を示している。例えば検知装置10を設置する際、進入路32に対して任意の角度で仮に検知装置10が設置される。この状態において、検知装置10から進入路32に放射されたマイクロ波の範囲内に車両41が進入し、車両41がマイクロ波の範囲内から出るまでの時間が車両位置検知回路22により測定され、車両41の走行速度が速度測定回路21により測定される。検知領域算出回路23は、これらの測定結果を用いて、上記式を演算し、検知領域DAの進入路に沿った距離Bを算出する。検知装置10のホーンアンテナ12から放射されるマイクロ波は、法線に対して対称に放射され、法線と進入路32とがなす角度は計測により既知である。このため、進入路32内において、検知装置10に対して検知領域DAの範囲を特定することができる。したがって、例えば検知領域DAの一部がSAやPA内に位置するかどうかを容易に認識することができ、検知装置10の進入路32に対する角度を調整することにより、検知領域DAを正確に設定することができる。よって、SAやPA内の車両を誤検知することを防止できる。
【0029】
上記第1の実施形態によれば、検知装置10は測定装置20を有し、測定装置20により、検知装置10から進入路32に放射されるマイクロ波の放射範囲としての検知領域DAの範囲を測定可能としている。このため、検知装置10を進入路32に設置する際、マイクロ波の放射範囲を確認することができ、検知装置10の設置作業を簡単化できる。しかも、検知領域DAの一部がSAやPA内に位置するかどうかを容易に認識することができるため、検知領域DAの一部がSAやPA内に位置する場合は、検知装置10の設置場所や設置角度を変更して検知領域DAをSAやPA外に移動することができる。したがって、SAやPA内を走行する車両を逆走車両と誤検知することを防止でき、逆走車両の検知精度を向上することが可能である。
【0030】
尚、測定装置20は、検知装置10の設置作業において必要なものである。このため、測定装置20を検知装置10に対して着脱自在な構成とし、設置作業の後、測定装置20を取り外すことも可能である。
【0031】
(第2の実施形態)
図4は、第2の実施形態を示している。第2の実施形態において、第1の実施形態と同一部分には同一符号を付す。第1の実施形態は、検知装置10からマイクロ波を検知領域DAに放射して逆走車両を検知する。しかし、マイクロ波は、豪雨や雪などの気象条件により検知精度が低下する。また、このような厳しい気象条件の場合、進入路を誤認して逆走する車両が発生する可能性が高い。そこで、第2の実施形態は、マイクロ波以外の例えば赤外線センサや超音波センサをさらに備えた複合検知装置により、気象条件に拘わらず逆走車両の検知精度を維持可能としている。
【0032】
すなわち、図4において、検知装置10の近傍には、例えば赤外線センサを用いた検知装置51が設けられている。この検知装置51は、周知の構成が適用可能である。例えば検知装置51は、2つの赤外線発光素子とこれらに対応して配置された受光素子を有している。2つの赤外線発光素子は、進入路を横切り、且つ車両の走行方向に所定間隔、離して赤外線をそれぞれ発生する。この検知装置51は、車両により、光が遮断されたことを検出する。このため、発光素子と受光素子を用いる場合、発光素子と受光素子は進入路を挟んで対向して配置され、発光素子と受光素子及び反射板を用いる場合、発光素子と受光素子は進入路の一方側に配置され、進入路を挟んでこれらに対向して反射板が配置される。
【0033】
このような構成において、2つの赤外線を車両が横切った場合、どちらの赤外線が先に遮断されたかを判別することにより車両の走行方向を判別することが可能であり、逆走車両を検知することができる。
【0034】
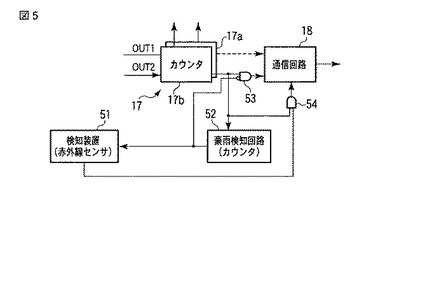
図5は、第2の実施形態の回路構成を示すものである。第2の実施形態は、図1に示す回路構成に豪雨検出回路52及び赤外線センサを用いた検知装置51を設けたものであり、図5において、図1の一部のみを示している。
【0035】
逆走車両を検知するカウンタ17bの出力信号は、豪雨検出回路52に供給される。この豪雨検出回路52は、例えばカウンタ17bの出力信号を例えば5分間カウントし、5分毎にリセットされるカウンタにより構成されている。一般に、5分間という短時間に逆走車両が頻発することはない。このため、カウンタにより、5分の間に逆走車両が例えば3台検出された場合、これは逆走ではなく、豪雨状態であると判断し、赤外線センサにより構成された検知装置51が起動される。さらに、豪雨検知回路52の出力信号は、アンド回路53の反転入力端に供給される。このアンド回路53の非反転入力端にはカウンタ17bの出力信号が供給されている。このため、豪雨検知回路52により豪雨が検出されると、アンド回路53によりカウンタ17bの出力信号が通信回路18に供給されることが遮断される。この状態において、検知装置51により逆走車両が検知されると、検知装置51の出力信号とカウンタ17bの出力信号のアンド回路54を介して通信装置18に供給される。すなわち、検知装置10と検知装置51の両方から検知信号が出力された場合、通信装置18に信号が供給される。これにより、通信装置18から図1に示す報知装置19a、19bに信号が供給され、報知装置19a、19bにより警報が報知される。
【0036】
上記第2の実施形態によれば、豪雨検知回路52によりカウンタ17bの出力信号を一定時間カウントし、このカウント値が基準値を超えた場合、豪雨と判断して、赤外線センサにより構成された検知装置51を起動している。このため、マイクロ波による逆走車両の検知が困難な気象条件においても、赤外線を使用して逆走車両を検知することが可能である。したがって、誤検知を防止して確実に逆走車両を検出して事故を防止することが可能である。しかも、検知装置10と検知装置51の両方の検知信号に基づき通信装置18、報知装置19a、19bを動作させているため、逆走車両の検知精度を向上させることができる。
【0037】
尚、第2の実施形態は、赤外線センサを用いた検知装置について説明したが、赤外線センサに代えて、例えば超音波センサを用いることも可能である。
【0038】
(第3の実施形態)
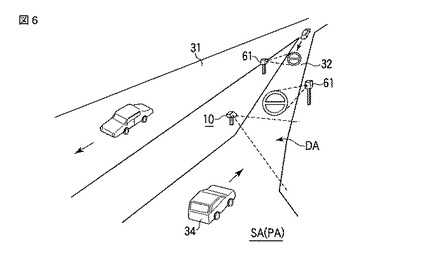
図6は、本発明の第3の実施形態を示している。第1の実施形態において、報知装置19a、19bは、表示器や回転灯である場合について説明した。これに対して、図6に示す第3の実施形態は、報知装置19a、19bが、例えば投影装置61により構成されている場合を示している。この投影装置61は、検知装置10、51により逆走車両が検知された場合に起動され、進入路32の路面上に例えば進入禁止の標識を投影する。
【0039】
上記第3の実施形態によれば、逆走車両が検知された場合、投影装置61により進入路32の路面上に警告標識を投影している。一般に、運転者は、通常、前方の路上を目視している。このため、路面上に進入禁止などの警告標識を大きく投影することにより、警告の見落としを防止でき、確実に運転者に注意を喚起できる。さらに、車両の逆走は夜間に発生することが多いため、投影機によって路上に警告標識を明確に投影することにより、逆走車両や順走車両に対する注意喚起効果を向上させることが可能である。
【0040】
(第4の実施形態)
図7は、第4の実施形態を示すものである。検知装置10の設置箇所はその地域の気象条件に影響を受ける。例えば豪雪地域のSAやPAの進入路に検知装置10を設置する場合において、検知装置10が雪に埋もれることにより機能が低下することを考慮する必要がある。このため、検知装置10が設置される高さを調整可能とすることが望まれている。
【0041】
そこで、第4の実施形態では、図7に示すように、検知装置10を、高さ調整機構を有する支柱により設置している。すなわち、検知装置10が搭載された第1の支柱70に第2の支柱71が挿入されている。第2の支柱71には第1の支柱70に設けられた開孔(又はねじ穴)74に連通可能な複数の開孔(又はねじ穴)72が支柱の長さ方向に所定間隔、離して設けられている。第1の支柱70の開口74及び第2の支柱71の開孔72にピン(又はボルト)73を装着することにより、第1の支柱70が第2の支柱71に対して固定される。例えば積雪量に応じて第2の支柱71に対する第1の支柱70の位置を調整した状態において開孔72にピン73を装着して固定することにより、検知装置10が雪に埋もれることを防止できる。
【0042】
このように、第4の実施形態によれば、検知装置10を、高さ調整機構を有する支柱により設置している。したがって、積雪量の多い地方においても、検知装置10が雪に埋もれることを防止でき、確実に車両の逆走を防止することが可能である。
【0043】
本発明は、上記各実施形態に限定されるものではなく、発明の要旨を変えない範囲において種々変形実施可能なことは勿論である。
【符号の説明】
【0044】
10…検知装置、11…ドップラーモジュール、17a、17b…カウンタ、20…測定装置、21…速度測定回路、22…車両位置検知回路、23…検知領域算出回路、51…検知装置(赤外線センサ)、52…豪雨検知回路(カウンタ)、61…投影装置、70、71…第1、第2の支柱、72…開孔(ねじ穴)、73…ピン(ボルト)。
【技術分野】
【0001】
本発明は、例えば有料道路の進入路等の一方通行路を車両が逆走することを防止する逆走防止装置に関する。
【背景技術】
【0002】
例えば有料道路のサービスエリア(以下、SAと称す)や、パーキングエリア(以下、PAと称す)において、SAやPAの入口と出口を誤認し、SAやPAへの進入路を逆走し、SAやPAに進入して来る車両と衝突するという事故が発生している。
【0003】
従来、上記進入路のような一方通行路を逆走する車両を例えばマイクロ波により検出し、逆走車両に逆走を警告する逆走防止装置が開発されている(例えば、特許文献1、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−182256号公報
【特許文献2】特開2007−140757号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来の逆走防止装置において、マイクロ波を放射して逆走車両を検知する検知装置をSAやPAの進入路に設置する際、検知装置から放射されるマイクロ波の放射範囲を正確に知ることが困難であった。また、進入路及びSAやPAの構造が様々であり、SAやPAに対する進入路の角度も様々である。このため、検知装置から放射されるマイクロ波の一部がSAやPA内に漏れていることがあり、検知装置がSAやPA内を走行する車両に反応し、進入路に逆走車両がないにも拘わらず、逆走車両有りと判断することがあった。このように、検知装置により誤検知が生じた場合、進入路に設置された報知器から進入路を走行中の正規の車両に誤報が報知されるという不都合があった。
【0006】
また、検知装置は、気象条件によっても誤検知が生じることがあり、例えば豪雨時、検知装置が豪雨に反応し、逆走車両がないにも拘わらず、逆走車両有りと判断することがあった。
【0007】
本発明は、逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明の逆走防止装置の態様は、一方通行路の出口近傍に設置され、前記一方通行路の検知領域に電波を放射し、前記検知領域内の車両からの反射波を受信する送受信部と、前記送受信部から出力される一対の信号の位相を検知することにより、前記一方通行路を走行する前記車両の進行方向を識別する識別部と、前記送受信部から出力される一対の信号に基づき、前記車両の速度を測定する第1の測定部と、前記識別部の出力信号に基づき、前記車両が検知されている時間を測定する第2の測定部と、前記第1、第2の測定部の出力信号に基づき、前記検知領域の車両走行方向の距離を測定する第3の測定部とを具備することを特徴とする。
【発明の効果】
【0009】
本発明は、逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供する。
【図面の簡単な説明】
【0010】
【図1】本発明の逆走防止装置の第1の実施形態を示す回路構成図。
【図2】本発明の第1の実施形態のシステム構成を示す図。
【図3】検知領域の範囲を説明するために示す図。
【図4】本発明の第2の実施形態を示す構成図。
【図5】本発明の第2の実施形態の回路構成の要部を示す図。
【図6】本発明の第3の実施形態を示すシステム構成図。
【図7】本発明の第4の実施形態を示す一部断面とした側面図。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を参照して説明する。
【0012】
(第1の実施形態)
図2は逆走防止装置の設置状態を概略的に示している。
【0013】
図2において、有料道路の本線31とSA(又はPA)の間には、本線31から分岐されSAに通じる一方通行路としての進入路32が設けられている。この進入路32のSA側(以下、出口と称す)に、検知装置10が設置されている。この検知装置10は、マイクロ波を用いて進入路32を逆走しようとする車両34を検出する。すなわち、この検知装置10はマイクロ波を検知領域DAに送信し、検知領域DAに進入した車両34からの反射波を受信する。このため、検知領域DAは、進入路32を横断し、進入路32からSA(又はPA)側に向けて例えば斜めに設定されている。
【0014】
検知装置10は、有線又は無線により報知装置19に接続されている。検知装置10と報知装置19との間の距離は、進入路32の入口から出口までの距離や、形状により異なるが、逆走車両及び順方向に走行する車両(順走車両)に短時間に警報を発生できるよう最適位置に設置される。報知装置19a、19bは、例えば警告を促す文字情報を表示する表示装置や、回転灯により構成されている。検知装置10により、逆走車両が検知されると、検知装置10の出力信号により報知装置19a、19bが駆動される。報知装置19aは、逆走車両に警告を報知し、報知装置19bは、順走車両に警告を報知する。
【0015】
図1は、本発明の逆走防止装置の第1の実施形態を示している。
【0016】
検知装置10は、例えばドップラーモジュール11、ホーンアンテナ12、増幅器13、可変抵抗14、フィルタ回路15、進行方向識別回路16、カウンタ17、通信回路18により構成されている。このうち、ドップラーモジュール11、増幅器13、可変抵抗14、進行方向識別回路16は、上記特許文献2と同様の構成である。すなわち、ドップラーモジュール11は、特定小電力無線機により構成され、例えば24GHz帯(Kバンド)のマイクロ波を発生し、例えばホーンアンテナ12に供給する。ホーンアンテナ12は、検知領域DAにマイクロ波を放射する。検知領域DA内の車両から反射された反射波は、ホーンアンテナ12により受信され、ドップラーモジュール11に供給される。ドップラーモジュール11は、周知のドップラーセンサであり、受信された信号を検波し、送信周波数と受信周波数の位相差からドップラー周波数を検出する。このドップラーモジュール11は、ドップラー周波数に応じて、位相の異なる一対の信号IF1、IF2を出力する。この信号IF1、IF2は、検知領域調整部としての増幅器13に供給される。
【0017】
増幅器13は、信号IF1、IF2をそれぞれ増幅する2系統の例えば可変利得増幅器により構成され、可変抵抗14の抵抗値を変えることにより、これら可変利得増幅器の利得が調整可能とされている。この増幅器13の利得を変えることにより、車両の検知距離を例えば最大30mの範囲内で、例えば5m間隔で調整可能とされている。この増幅器13の出力信号は、フィルタ15に供給される。このフィルタ15は、例えば信号IF1、IF2を通過する帯域通過フィルタにより構成され、このフィルタ15を通過した信号IF1、IF2は、進行方向識別回路16に供給される。
【0018】
進行方向識別回路16は、特許文献2に記載されるように、例えば2つのフリップフロップ回路により構成され、フィルタ15を通過した信号IF1、IF2のうち、信号IF1は、一方のフリップフロップ回路のクロック信号入力端と、フリップフロップ回路のデータ入力端及びクリア信号入力端に供給され、信号IF2は、フリップフロップ回路のクロック信号入力端と、他方のフリップフロップ回路のデータ入力端及びクリア信号入力端に供給される。さらに、両フリップフロップ回路のプリセット信号入力端子には、例えば電源電圧が供給されている。
【0019】
上記構成において、ドップラーモジュール11の出力信号IF1、IF2は、信号IF1が信号IF2より位相が進んでいる場合、車両が検知装置10から離れる方向(順走方向)に走行していることを示し、信号IF2が信号IF1より位相が進んでいる場合、車両が検知装置10に接近する方向(逆走方向)に走行していることを示している。
【0020】
信号IF1が、信号IF2より進んでいる場合、一方のフリップフロップ回路の出力端より信号OUT1が出力され、信号IF2が、信号IF1より進んでいる場合、他方のフリップフロップ回路の出力端より出力信号OUT2が出力される。この信号OUT2は、逆走を示している。
【0021】
進行方向識別回路16の出力信号は、カウンタ17を介して通信回路18に供給される。カウンタ17は、例えば進行方向識別回路16から供給される信号OUT1、OUT2をそれぞれカウントする2つのカウンタ17a、17bにより構成されている。これらカウンタ17a、17bは、信号OUT1、OUT2の数を一定時間それぞれカウントする。すなわち、ドップラーモジュール11から出力される信号IF1、IF2は、車両の走行速度に応じて周波数が変化する。つまり、車両の走行速度が速い場合、信号IF1、IF2の周波数が高くなり、走行速度が遅い場合、周波数が低くなる。このため、信号IF1、IF2の周波数が高い場合、一定時間内に発生される信号OUT1、OUT2の数が増加し、信号IF1、IF2の周波数が低い場合、一定時間内に発生される信号OUT1、OUT2の数が減少する。カウンタ17bは、一定時間、例えば数十msの間、信号OUT2をカウントし、オーバーフローした場合、パルス信号を出力する。このような構成とすることにより、例えば時速6km以下の移動物体の場合、カウンタ17bがオーバーフローしない。したがって、時速6km以下の移動物体は、車両以外のノイズとして除去でき、誤検知を防止できる。
【0022】
信号OUT2をカウントするカウンタ17bから出力されたパルス信号、すなわち、逆走車両を検知したことを示す信号は、通信回路18に供給される。通信回路18は、カウンタ17の出力信号に基づき、報知装置19a、19bを起動させる。報知装置19a、19bは通信回路18からの信号に従って、表示装置や回転灯を駆動し、逆走車両、及び順走車両に対して警告を行う。
【0023】
一方、検知装置10は、誤検知を防止するため、マイクロ波の到達範囲を測定する測定装置20を有している。この測定装置20は、例えば速度測定回路21、車両位置検知回路22、検知領域算出回路23、表示装置24により構成されている。
【0024】
速度測定回路21は、例えば周波数カウンタにより構成され、フィルタ15を通過した例えば信号IF1を一定時間カウントし、周波数を車両の走行速度に変換する。
【0025】
また、車両位置検知回路22は、検知領域DA内を走行する車両の移動時間を検知する。すなわち、車両位置検知回路22は、例えばカウンタ17bから出力される信号OUT2をカウントするカウンタを含み、車両の移動時間をカウント値として検知する。車両位置検知回路22の構成はこれに限定されるものではない。カウンタ17bから出力される信号OUT2は、連続した信号群である。例えば単安定マルチバイブレータにより、この信号群の最初の信号の立ち上がりから一定時間(例えば50ms)ハイレベルを維持する。この間に次の信号が入力された場合、単安定マルチバイブレータにより、その信号の立ち上がりからさらに一定時間(例えば50ms)ハイレベルを維持する。このハイレベルの期間をカウンタによりカウントすることによっても車両の移動時間を測定することが可能である。
【0026】
車両位置検知回路22の出力信号X及び速度測定回路21の出力信号Yは、検知領域算出回路23に供給される。検知領域算出回路23は、車両位置検知回路22の出力信号X及び速度測定回路21の出力信号Yに基づき、次式から検知領域DAにおけるマイクロ波の到達範囲(距離B)を算出する。
【0027】
B=Y×1000÷3600×X B:(m),Y:(km/h),X:(s)
この算出された距離Bは、表示装置24に表示される。
【0028】
図3は、検知領域と車両の関係を示している。例えば検知装置10を設置する際、進入路32に対して任意の角度で仮に検知装置10が設置される。この状態において、検知装置10から進入路32に放射されたマイクロ波の範囲内に車両41が進入し、車両41がマイクロ波の範囲内から出るまでの時間が車両位置検知回路22により測定され、車両41の走行速度が速度測定回路21により測定される。検知領域算出回路23は、これらの測定結果を用いて、上記式を演算し、検知領域DAの進入路に沿った距離Bを算出する。検知装置10のホーンアンテナ12から放射されるマイクロ波は、法線に対して対称に放射され、法線と進入路32とがなす角度は計測により既知である。このため、進入路32内において、検知装置10に対して検知領域DAの範囲を特定することができる。したがって、例えば検知領域DAの一部がSAやPA内に位置するかどうかを容易に認識することができ、検知装置10の進入路32に対する角度を調整することにより、検知領域DAを正確に設定することができる。よって、SAやPA内の車両を誤検知することを防止できる。
【0029】
上記第1の実施形態によれば、検知装置10は測定装置20を有し、測定装置20により、検知装置10から進入路32に放射されるマイクロ波の放射範囲としての検知領域DAの範囲を測定可能としている。このため、検知装置10を進入路32に設置する際、マイクロ波の放射範囲を確認することができ、検知装置10の設置作業を簡単化できる。しかも、検知領域DAの一部がSAやPA内に位置するかどうかを容易に認識することができるため、検知領域DAの一部がSAやPA内に位置する場合は、検知装置10の設置場所や設置角度を変更して検知領域DAをSAやPA外に移動することができる。したがって、SAやPA内を走行する車両を逆走車両と誤検知することを防止でき、逆走車両の検知精度を向上することが可能である。
【0030】
尚、測定装置20は、検知装置10の設置作業において必要なものである。このため、測定装置20を検知装置10に対して着脱自在な構成とし、設置作業の後、測定装置20を取り外すことも可能である。
【0031】
(第2の実施形態)
図4は、第2の実施形態を示している。第2の実施形態において、第1の実施形態と同一部分には同一符号を付す。第1の実施形態は、検知装置10からマイクロ波を検知領域DAに放射して逆走車両を検知する。しかし、マイクロ波は、豪雨や雪などの気象条件により検知精度が低下する。また、このような厳しい気象条件の場合、進入路を誤認して逆走する車両が発生する可能性が高い。そこで、第2の実施形態は、マイクロ波以外の例えば赤外線センサや超音波センサをさらに備えた複合検知装置により、気象条件に拘わらず逆走車両の検知精度を維持可能としている。
【0032】
すなわち、図4において、検知装置10の近傍には、例えば赤外線センサを用いた検知装置51が設けられている。この検知装置51は、周知の構成が適用可能である。例えば検知装置51は、2つの赤外線発光素子とこれらに対応して配置された受光素子を有している。2つの赤外線発光素子は、進入路を横切り、且つ車両の走行方向に所定間隔、離して赤外線をそれぞれ発生する。この検知装置51は、車両により、光が遮断されたことを検出する。このため、発光素子と受光素子を用いる場合、発光素子と受光素子は進入路を挟んで対向して配置され、発光素子と受光素子及び反射板を用いる場合、発光素子と受光素子は進入路の一方側に配置され、進入路を挟んでこれらに対向して反射板が配置される。
【0033】
このような構成において、2つの赤外線を車両が横切った場合、どちらの赤外線が先に遮断されたかを判別することにより車両の走行方向を判別することが可能であり、逆走車両を検知することができる。
【0034】
図5は、第2の実施形態の回路構成を示すものである。第2の実施形態は、図1に示す回路構成に豪雨検出回路52及び赤外線センサを用いた検知装置51を設けたものであり、図5において、図1の一部のみを示している。
【0035】
逆走車両を検知するカウンタ17bの出力信号は、豪雨検出回路52に供給される。この豪雨検出回路52は、例えばカウンタ17bの出力信号を例えば5分間カウントし、5分毎にリセットされるカウンタにより構成されている。一般に、5分間という短時間に逆走車両が頻発することはない。このため、カウンタにより、5分の間に逆走車両が例えば3台検出された場合、これは逆走ではなく、豪雨状態であると判断し、赤外線センサにより構成された検知装置51が起動される。さらに、豪雨検知回路52の出力信号は、アンド回路53の反転入力端に供給される。このアンド回路53の非反転入力端にはカウンタ17bの出力信号が供給されている。このため、豪雨検知回路52により豪雨が検出されると、アンド回路53によりカウンタ17bの出力信号が通信回路18に供給されることが遮断される。この状態において、検知装置51により逆走車両が検知されると、検知装置51の出力信号とカウンタ17bの出力信号のアンド回路54を介して通信装置18に供給される。すなわち、検知装置10と検知装置51の両方から検知信号が出力された場合、通信装置18に信号が供給される。これにより、通信装置18から図1に示す報知装置19a、19bに信号が供給され、報知装置19a、19bにより警報が報知される。
【0036】
上記第2の実施形態によれば、豪雨検知回路52によりカウンタ17bの出力信号を一定時間カウントし、このカウント値が基準値を超えた場合、豪雨と判断して、赤外線センサにより構成された検知装置51を起動している。このため、マイクロ波による逆走車両の検知が困難な気象条件においても、赤外線を使用して逆走車両を検知することが可能である。したがって、誤検知を防止して確実に逆走車両を検出して事故を防止することが可能である。しかも、検知装置10と検知装置51の両方の検知信号に基づき通信装置18、報知装置19a、19bを動作させているため、逆走車両の検知精度を向上させることができる。
【0037】
尚、第2の実施形態は、赤外線センサを用いた検知装置について説明したが、赤外線センサに代えて、例えば超音波センサを用いることも可能である。
【0038】
(第3の実施形態)
図6は、本発明の第3の実施形態を示している。第1の実施形態において、報知装置19a、19bは、表示器や回転灯である場合について説明した。これに対して、図6に示す第3の実施形態は、報知装置19a、19bが、例えば投影装置61により構成されている場合を示している。この投影装置61は、検知装置10、51により逆走車両が検知された場合に起動され、進入路32の路面上に例えば進入禁止の標識を投影する。
【0039】
上記第3の実施形態によれば、逆走車両が検知された場合、投影装置61により進入路32の路面上に警告標識を投影している。一般に、運転者は、通常、前方の路上を目視している。このため、路面上に進入禁止などの警告標識を大きく投影することにより、警告の見落としを防止でき、確実に運転者に注意を喚起できる。さらに、車両の逆走は夜間に発生することが多いため、投影機によって路上に警告標識を明確に投影することにより、逆走車両や順走車両に対する注意喚起効果を向上させることが可能である。
【0040】
(第4の実施形態)
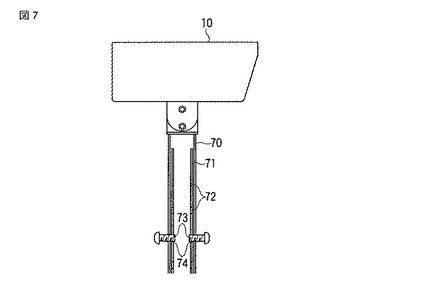
図7は、第4の実施形態を示すものである。検知装置10の設置箇所はその地域の気象条件に影響を受ける。例えば豪雪地域のSAやPAの進入路に検知装置10を設置する場合において、検知装置10が雪に埋もれることにより機能が低下することを考慮する必要がある。このため、検知装置10が設置される高さを調整可能とすることが望まれている。
【0041】
そこで、第4の実施形態では、図7に示すように、検知装置10を、高さ調整機構を有する支柱により設置している。すなわち、検知装置10が搭載された第1の支柱70に第2の支柱71が挿入されている。第2の支柱71には第1の支柱70に設けられた開孔(又はねじ穴)74に連通可能な複数の開孔(又はねじ穴)72が支柱の長さ方向に所定間隔、離して設けられている。第1の支柱70の開口74及び第2の支柱71の開孔72にピン(又はボルト)73を装着することにより、第1の支柱70が第2の支柱71に対して固定される。例えば積雪量に応じて第2の支柱71に対する第1の支柱70の位置を調整した状態において開孔72にピン73を装着して固定することにより、検知装置10が雪に埋もれることを防止できる。
【0042】
このように、第4の実施形態によれば、検知装置10を、高さ調整機構を有する支柱により設置している。したがって、積雪量の多い地方においても、検知装置10が雪に埋もれることを防止でき、確実に車両の逆走を防止することが可能である。
【0043】
本発明は、上記各実施形態に限定されるものではなく、発明の要旨を変えない範囲において種々変形実施可能なことは勿論である。
【符号の説明】
【0044】
10…検知装置、11…ドップラーモジュール、17a、17b…カウンタ、20…測定装置、21…速度測定回路、22…車両位置検知回路、23…検知領域算出回路、51…検知装置(赤外線センサ)、52…豪雨検知回路(カウンタ)、61…投影装置、70、71…第1、第2の支柱、72…開孔(ねじ穴)、73…ピン(ボルト)。
【特許請求の範囲】
【請求項1】
一方通行路の出口近傍に設置され、前記一方通行路の検知領域に電波を放射し、前記検知領域内の車両からの反射波を受信する送受信部と、
前記送受信部から出力される一対の信号の位相を検知することにより、前記一方通行路を走行する前記車両の進行方向を識別する識別部と、
前記送受信部から出力される一対の信号に基づき、前記車両の速度を測定する第1の測定部と、
前記識別部の出力信号に基づき、前記車両が検知されている時間を測定する第2の測定部と、
前記第1、第2の測定部の出力信号に基づき、前記検知領域の車両走行方向の距離を測定する第3の測定部と
を具備することを特徴とする逆走防止装置。
【請求項2】
前記検知領域に向けて設置された少なくとも赤外線センサ、超音波センサの1つを含む検知手段と、
前記識別部の出力信号を一定時間の間カウントし、カウント値が基準値を超えた場合、前記検知手段を起動する豪雨検出手段と
をさらに具備することを特徴とする請求項1記載の逆走防止装置。
【請求項3】
前記送受信部と前記一方通行路の入口との間に設置され、前記識別部から供給された逆走車両を示す信号に応答し、前記一方通行路を逆走する車両に警告を報知する第1の報知手段を有し、
前記送受信部と前記一方通行路の入口との間に設置され、前記識別部から供給された逆走車両を示す信号に応答し、前記一方通行路を順走する車両に警告を報知する第2の報知手段と
を具備することを特徴とする請求項2記載の逆走防止装置。
【請求項4】
前記第1、第2の報知手段は、警告情報を路面に投影する投影手段と、路面に設置された警報手段の少なくとも1つからなることを特徴とする請求項3記載の逆走防止装置。
【請求項5】
前記送受信部と前記識別部を含む検知装置と、
前記検知装置が搭載される高さ調整機構を有する支柱と
を具備することを特徴とする請求項4記載の逆走防止装置。
【請求項1】
一方通行路の出口近傍に設置され、前記一方通行路の検知領域に電波を放射し、前記検知領域内の車両からの反射波を受信する送受信部と、
前記送受信部から出力される一対の信号の位相を検知することにより、前記一方通行路を走行する前記車両の進行方向を識別する識別部と、
前記送受信部から出力される一対の信号に基づき、前記車両の速度を測定する第1の測定部と、
前記識別部の出力信号に基づき、前記車両が検知されている時間を測定する第2の測定部と、
前記第1、第2の測定部の出力信号に基づき、前記検知領域の車両走行方向の距離を測定する第3の測定部と
を具備することを特徴とする逆走防止装置。
【請求項2】
前記検知領域に向けて設置された少なくとも赤外線センサ、超音波センサの1つを含む検知手段と、
前記識別部の出力信号を一定時間の間カウントし、カウント値が基準値を超えた場合、前記検知手段を起動する豪雨検出手段と
をさらに具備することを特徴とする請求項1記載の逆走防止装置。
【請求項3】
前記送受信部と前記一方通行路の入口との間に設置され、前記識別部から供給された逆走車両を示す信号に応答し、前記一方通行路を逆走する車両に警告を報知する第1の報知手段を有し、
前記送受信部と前記一方通行路の入口との間に設置され、前記識別部から供給された逆走車両を示す信号に応答し、前記一方通行路を順走する車両に警告を報知する第2の報知手段と
を具備することを特徴とする請求項2記載の逆走防止装置。
【請求項4】
前記第1、第2の報知手段は、警告情報を路面に投影する投影手段と、路面に設置された警報手段の少なくとも1つからなることを特徴とする請求項3記載の逆走防止装置。
【請求項5】
前記送受信部と前記識別部を含む検知装置と、
前記検知装置が搭載される高さ調整機構を有する支柱と
を具備することを特徴とする請求項4記載の逆走防止装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−267208(P2010−267208A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−119993(P2009−119993)
【出願日】平成21年5月18日(2009.5.18)
【出願人】(395014596)株式会社アイアールエフ (11)
【出願人】(390002543)株式会社フジソク (11)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月18日(2009.5.18)
【出願人】(395014596)株式会社アイアールエフ (11)
【出願人】(390002543)株式会社フジソク (11)
【Fターム(参考)】
[ Back to top ]