
通信システム、通信装置及び通信方法

【課題】リンギングの影響を低減し、通信の高速化を実現可能な通信システム、通信装置及び通信方法を提供する。
【解決手段】ECU1は、送信データがドミナントの場合、第1時間Tpに亘って第1信号レベルの信号を通信線5に出力し、その後の第2時間Thに亘って第2信号レベル(0V)の信号を出力し、送信データがレセシブ且つ通信線5の信号レベルがレセシブの場合、第1時間Tp及び第2時間Thに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、送信データがレセシブ且つ通信線5の信号レベルがドミナントの場合、第1時間Tpに亘って信号出力をせずにハイインピーダンス状態とし、その後第2時間Thに亘って第2信号レベルの信号を出力する。ECU1は、スイッチを切り替えることによって、通信線5に対する抵抗器の接続/遮断を行うことが可能な構成であり、1ビットの送信時間Tbにおける第1時間Tp経過後に抵抗器の接続を行う。
【解決手段】ECU1は、送信データがドミナントの場合、第1時間Tpに亘って第1信号レベルの信号を通信線5に出力し、その後の第2時間Thに亘って第2信号レベル(0V)の信号を出力し、送信データがレセシブ且つ通信線5の信号レベルがレセシブの場合、第1時間Tp及び第2時間Thに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、送信データがレセシブ且つ通信線5の信号レベルがドミナントの場合、第1時間Tpに亘って信号出力をせずにハイインピーダンス状態とし、その後第2時間Thに亘って第2信号レベルの信号を出力する。ECU1は、スイッチを切り替えることによって、通信線5に対する抵抗器の接続/遮断を行うことが可能な構成であり、1ビットの送信時間Tbにおける第1時間Tp経過後に抵抗器の接続を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、共通の通信線に接続された複数の通信装置が相互に情報の送受信を行うと共に、通信線に対する情報送信の衝突を検知することができる通信システム、通信装置及び通信方法に関する。
【背景技術】
【0002】
従来、車輌に搭載された複数の電子機器(通信装置)間の通信にはCAN(Controller
Area Network)の通信プロトコルが広く採用されている(非特許文献1、2参照)。CANの通信プロトコルでは、共通のCANバスに複数の通信装置が接続されるため、複数の通信装置が同時的に情報送信を行って衝突が発生した場合には、各通信装置にて調停処理(アービトレーション)が行われ、優先度の高い情報送信が実行される。アービトレーションを行うために、各通信装置は、CANバスに送信信号の出力を行うと同時に、CANバスの信号レベルの検出を行い、自らが出力した送信信号に対して、検出した信号の信号レベルがレセシブ(劣性値)からドミナント(優性値)に変化した場合、通信の衝突が発生したと判断し、送信処理を停止する。CANバス上の信号はレセシブよりドミナントが優位であるため、通信の衝突が発生してもドミナントを出力した電子機器は送信処理を継続して行うことができる。
【0003】
一般的に、CANの通信プロトコルを採用した通信システムでは、通信線としてツイスト線が用いられ、各通信装置が差動信号による通信を行っており、ツイスト線間の電位差が閾値を超えるものをドミナントとし、電位差が閾値を超えないものをレセシブとしている。また通信装置内のデジタル処理では、ドミナントをデータ0に対応付け、レセシブをデータ1に対応付けている。図11は、従来の通信システムにおける信号波形の一例を示す模式図であり、縦軸をツイスト線間の電位差とし、横軸を時間としたグラフである。図11に示す信号波形は、CANバス上でドミナントからレセシブへ信号を変化させた場合(0ns〜1000nsにドミナント送信、1000ns〜2000nsにレセシブ送信)の波形を示してある。図示のように、通信装置がCANバスへ出力する送信信号をドミナントからレセシブへ変化させた場合、CANバス上の信号レベル(電位差)が徐々に減衰しながら振動する波形が生じる。これは、多くの通信装置を接続するためにCANバスに多くの分岐部分を設ける必要がありこの分岐部分でのインピーダンス不整合、及び、CANバスに接続されている通信装置のインピーダンス不整合等の要因により信号反射などが繰り返されることによって生じるものであり、リンギングと呼ばれる。
【0004】
このようなリンギングが発生した場合、リンギングの信号レベルが有る程度減衰するまで、各通信装置はドミナント/レセシブの判定を行うことはできない。リンギングの信号レベルが減衰する時間は、CANバスを分岐させた分岐線の長さなどにより変化する。またリンギングの信号レベルは、CANバスに接続される通信装置の数などにより変化する。このため各通信装置は、通信システム中の通信装置の数及び分岐線の長さ等を考慮して、リンギングが十分に減衰すると考えられる時間を待機した後でドミナント/レセシブの判定を行う必要があり、CANプロトコルを用いる従来の通信システムはリンギングの影響によって通信の高速化が阻害されるという問題があった。
【0005】
特許文献1においては、通信装置のトランシーバにて、エミッタ端子がCANのHラインに接続され、コレクタ端子がCANのLラインに接続され、ベース端子がコンデンサを介してLラインに接続されたトランジスタを有する反射防止回路を設けることにより、反射信号の振幅を抑制することができる通信システムが提案されている。
【0006】
また特許文献2においては、通信装置のトランシーバにて、直列接続されたダイオード群及び逆方向に直列接続されたダイオード群を並列接続したものに抵抗を直列接続した回路を、CANバスの2つのライン間に設けることにより、信号の反射を抑制することができる通信システムが提案されている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】ISO 11898−1:2003 Road vehicles--Controller area network(CAN)--Part1:Datalink layer and physical signaling
【非特許文献2】ISO 11519−1:1994 Road vehicles--Low-speed serial data communication--Part1:Generaland definitions
【特許文献】
【0008】
【特許文献1】特開2010−200006号公報
【特許文献2】特開2010−206267号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら特許文献1、2に記載の通信システムは、CANバスの2つのライン間に信号反射を抑制するための簡単な回路を追加したのみの構成であり、このような構成ではリンギングの抑制効果にも自ずと限界があった。
【0010】
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、リンギングの影響を低減し、通信の高速化を実現可能な通信システム、通信装置及び通信方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る通信システムは、共通の通信線を介して接続された複数の通信装置を備え、各通信装置が、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段をそれぞれ有する通信システムにおいて、前記通信手段は、送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあることを特徴とする。
【0012】
また、本発明に係る通信システムは、前記通信装置が、一端が固定電位に接続された抵抗器の他端を、前記通信線に対して接続/遮断する切替部と、前記1ビット分の情報送信時間において前記第1時間Tpが経過した後に、前記抵抗器を接続するよう前記切替部の制御を行う切替制御手段とを備えることを特徴とする。
【0013】
また、本発明に係る通信システムは、前記第1時間Tp及び前記第2時間Thが、Tp+Th≦Tb、Th≧2×L×Aの条件を満たすこと(ただし、前記Tbは前記1ビット分の情報送信時間であり、前記Lは一の通信装置から他の通信装置までに介在する前記通信線の最短距離であり、前記Aは前記通信線における信号の伝達速度である。)を特徴とする。
【0014】
また、本発明に係る通信装置は、共通の通信線を介して他の装置に接続され、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段を備える通信装置において、前記通信手段は、送信する情報の優性値に
対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあることを特徴とする。
【0015】
また、本発明に係る通信方法は、共通の通信線を介して、各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信方法において、送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないことを特徴とする。
【0016】
従来のCANにおいて図11に示したようなリンギングは、通信装置の送信をドミナントからレセシブに変化させた場合に発生する。通信装置は、ドミナントの送信として通信線にハイレベルの信号(所定の電位差の信号)を出力し、その後、レセシブになりハイインピーダンス状態となる。一の通信装置によるドミナントからレセシブへの信号変化は、レセシブ(ハイインピーダンス状態)の他の通信装置にて反射され、この反射がレセシブへ移行した一の通信装置にて更に反射されることによって多重反射が発生し、リンギングとなる。
そこで本発明においては、送信する情報がドミナント(優性値)の場合、通信装置は、1ビット分の情報送信時間に対して、この時間よりも短い第1時間に亘る第1信号レベルの信号を出力した後、第2時間に亘る第2信号レベル(<第1信号レベル)の信号を通信線へ出力する。即ち通信装置は、ドミナントに対して第1信号レベルから第2信号レベルへ変化するパルス状の信号を出力する。また送信する情報がレセシブ(劣性値)の場合、通信装置は、通信線への信号出力を行わない(ハイインピーダンス状態となる)。
これにより、ドミナントの送信とレセシブの送信とが同時的に存在した場合、通信線上には第1信号レベルから第2信号レベルへ変化するパルス状の信号が観測されるため、レセシブを送信した通信装置は通信線上の信号を検出することによって、ドミナントを送信した通信装置の存在を検知することができる。なおレセシブを送信した通信装置は、第1信号レベルの時間が経過した後、第2信号レベルの区間にてインピーダンスマッチングを行うことにより、反射信号の発生を抑制することができる。
また通信装置が送信する情報をドミナントからレセシブへ変化させた場合、第1信号レベルから第2信号レベルへ信号レベルを低下させた後にハイインピーダンス状態へ移行する。このため通信線にて反射される信号の振幅を低減することができ、更に第2信号レベルを略0Vとすることで、反射信号の振幅を略0Vとすることができるため、リンギングの発生を抑制できる。
これにより、通信装置がドミナントを送信した次のビットにおけるリンギングの影響を低減できるため、各ビットにおいてドミナント/レセシブの判定を早いタイミングで行うことが可能となる。よって、通信の高速化が実現できる。
【0017】
複数の通信装置が共通の通信線を介して通信を行うシステムでは、主の通信線(幹線)を分岐させて支線を設け、この幹線又は支線の端部に通信装置がそれぞれ接続される。本発明においては、各通信装置が接続される通信線に対して、接地電位などの固定電位に接続された抵抗器を接続/遮断するスイッチなどの切替部を設ける。また各通信装置は、1ビット送信時間における第1時間経過後に抵抗器を接続するよう切替部の制御を行う。これにより通信システム中の各通信装置は、1ビット送信時間における第1時間経過後に通信線に対する抵抗器の接続を行い、この抵抗器によるインピーダンスマッチングを行うことができる。これにより、リンギング発生の要因であるインピーダンスの不整合を解消でき、リンギングの発生を抑制できる。
【0018】
リンギングは一の通信装置が出力した信号が他の通信装置にて反射されることにより生じるため、一の通信装置に対して最も隣接した(信号が伝搬する通信線の距離が最も短い)他の通信装置が、リンギングの発生に与える影響が大きい。
そこで本発明においては、通信システムに含まれる2つの通信装置間に介在する通信線の最短距離をLとし、通信線の伝達速度をAとした場合に、第2時間Thを
Th≧2×L×A
の条件を満たすように設定する。なお2×Lは2つの通信装置間の往復距離であり、2×L×Aは一の通信装置から出力された信号が他の通信装置にて反射されて一の通信装置へ戻るまでの時間である。この時間以上に第2時間Thを設定することによって、反射波が一の通信装置へ戻る前に、抵抗器によるインピーダンスマッチングを行うことにより、一の通信装置がハイインピーダンス状態へ移行することがなく、リンギングの発生を確実に抑制できる。
また第1の時間Tpは、1ビット分の情報送信時間をTbとした場合、
Tp+Th≦Tb
の条件を満たすように設定する必要がある。
【発明の効果】
【0019】
本発明による場合は、通信装置がドミナントの情報送信に対して、第1時間に亘る第1信号レベルの信号出力の後、第2時間に亘る第2信号レベルの信号出力を行う構成とすることにより、送信データの1ビット以内にリンギングの発生を抑制することができるため、各ビットにおけるドミナント/レセシブの判定を早いタイミングで行うことが可能となり、CANプロトコルのようなアービトレーションを行う通信を高速化することができる。
【図面の簡単な説明】
【0020】
【図1】通信システムの一構成例を示す模式図である。
【図2】通信装置の構成を示すブロック図である。
【図3】本発明に係る通信システムにおいて各ECUが送受信する信号を説明するための模式図である。
【図4】CAN通信制御部によるインピーダンスマッチングを説明するための模式図である。
【図5】データ送信に係る第1時間及び第2時間について説明するための模式図である。
【図6】CAN通信制御部による送信処理の手順を示すフローチャートである。
【図7】CAN通信制御部による送信処理の手順を示すフローチャートである。
【図8】CAN通信制御部による受信処理の手順を示すフローチャートである。
【図9】CAN通信制御部による受信処理の手順を示すフローチャートである。
【図10】本発明に係る通信システムの効果を説明するための模式図である。
【図11】従来の通信システムにおける信号波形の一例を示す模式図である。
【発明を実施するための形態】
【0021】
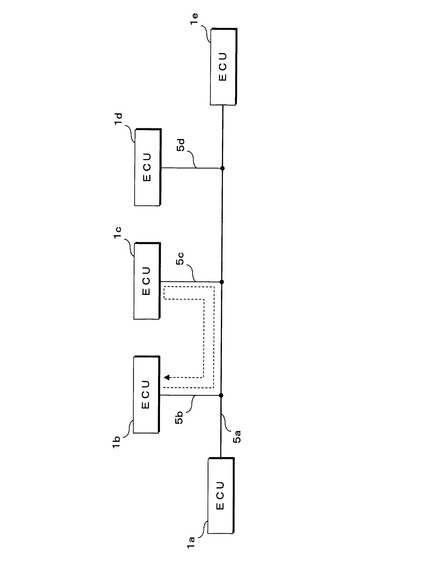
以下、本発明をその実施の形態を示す図面に基づき具体的に説明する。図1は、通信システムの一構成例を示す模式図である。本実施の形態に係る通信システムは、例えば図示しない車輌に搭載された複数のECU(Electronic Control Unit)1を通信装置として備え、複数のECU1が共通の通信線5を介して接続された構成である。なお、図1においては、複数のECU1にそれぞれ1a〜1eの符号を付して区別すると共に、通信線5を幹線5a及び支線5b〜5dに区別して図示してある。即ち、図示の通信システムは、ECU1a及び1eが幹線5aを介して接続され、通信線5の幹線5aから分岐した3つの支線5b〜5dにそれぞれECU1b〜1dが接続された構成である。
【0022】
例えばECU1bにて通信線5の支線5bへ信号が出力された場合、この信号は支線5bから幹線5a、支線5cを経てECU1cへ至り、ECU1cの端子部などにて反射された反射波が支線5c、幹線5a、支線5bを経てECU1bへ至る(図1中の破線の矢印参照)。また図1において図示は省略するが、ECU1dにおいても同様の反射波が発生する。このような信号の反射が繰り返されることによって、図11に示したようなリンギングとなる。なお、支線5b〜5dの距離が長くなると、信号の出力元へ反射波が戻るまでの時間が長くなるため、リンギングの周期が長くなり、リンギングが継続する時間(減衰までに要する時間)が長くなる。また通信線5の支線5b〜5dの数が多くなる(ECU1の数が多くなる)と、反射波の発生箇所が増加するため、リンギングの振幅が大きくなり、リンギングが減衰するまでに要する時間が長くなる。
【0023】
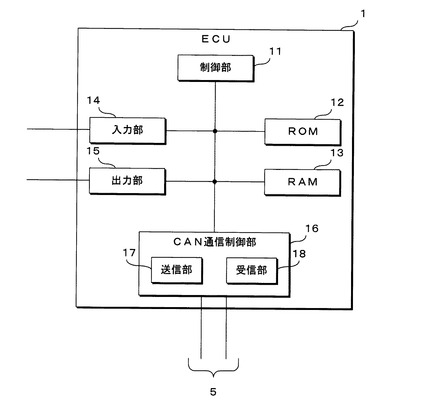
図2は、通信装置(ECU1)の構成を示すブロック図である。ECU1は、制御部11、ROM(Read Only Memory)12、RAM(Random Access Memory)13、入力部14、出力部15及びCAN通信制御部16等を備えて構成されている。制御部11は、CPU(Central Processing Unit)又はMPU(MicroProcessing Unit)等の演算処理装置を用いて構成されるものであり、ROM12に記憶された制御プログラムを読み出して実行することにより種々の制御処理を行うことができる。
【0024】
ROM12は、例えばEEPROM(Electrically Erasable Programmable ROM)又はフラッシュメモリ等の不揮発性のメモリ素子で構成されるものであり、制御部11にて実行される制御プログラム及び制御部11が行う処理に必要な情報等が予め記憶されている。RAM13は、例えばSRAM(Static RAM)又はDRAM(Dynamic RAM)等のメモリ素子で構成されるものであり、制御部11の処理に伴って生成された情報及び他のECU1との間で送受信する情報等の種々の情報が記憶される。
【0025】
入力部14は、例えば車輌の車速センサ若しくは温度センサ等のセンサ、又は、車輌の内外に配置された操作用の種々のスイッチ等の入力装置からの信号が入力され、入力信号のサンプリング又はA/D変換等の処理を行って得られた情報を制御部11へ与える。出力部15は、例えばモータ又はランプ等の負荷が接続され、制御部11からの指示に応じてこれらの負荷を駆動する駆動信号を出力する。なお、ECU1は必ずしも入力部14及び出力部15の両方を備える必要はなく、いずれか一方のみを備える構成であってよい。
【0026】
CAN通信制御部16は、通信線5に接続される端子を有しており、この端子に接続された通信線5を介して他のECU1との間でCANプロトコルに従った情報の送受信を行うものである。CAN通信制御部16は、制御部11から与えられた送信情報をCANプロトコルに応じた送信用のデータ(フレーム)に変換して送信部17へ与える。CAN通信制御部16の送信部17は、与えられた送信データの各ビットの値(0(ドミナント)又は1(レセシブ))に応じて、通信線5へ信号を出力する。なおCANプロトコルにおいては、通信線5としてツイスト線が用いられ、送信部17は通信線5へ差動信号を出力する。送信部17は、複数ビットで構成された送信データの各ビットについて順に処理を行い、処理対象ビットの値がドミナントの場合には、所定の第1時間に亘って第1信号レベルの信号を出力した後、所定の第2時間に亘って第2信号レベル(<第1信号レベル)の信号を出力する。また送信部17は、処理対象ビットの値がレセシブの場合、端子をハイインピーダンス状態とする。
【0027】
またCAN通信制御部16は、通信線5の信号レベル(ツイスト線の電位差)を検知することによって、通信線5上に送信された信号がドミナント/レセシブのいずれに対応する信号であるかを判定し、各ビットがドミナント/レセシブで表されるデータの受信を行う受信部18を有している。CAN通信制御部16は、受信部18にて受信したデータを制御部11へ与える。またCAN通信制御部16は、送信部17にて自らが送信したデー
タを受信部18にて受信し、送信データと受信データとが一致しない場合(送信データのレセシブが受信データにてドミナントに変化していた場合)、通信線5に接続された他のECU1の送信が発生していることを検知し、アービトレーションの処理を行う。なおECU1が行うアービトレーションの処理は、従来のCANプロトコルによるものと同じであるため、詳細な説明を省略する。
【0028】
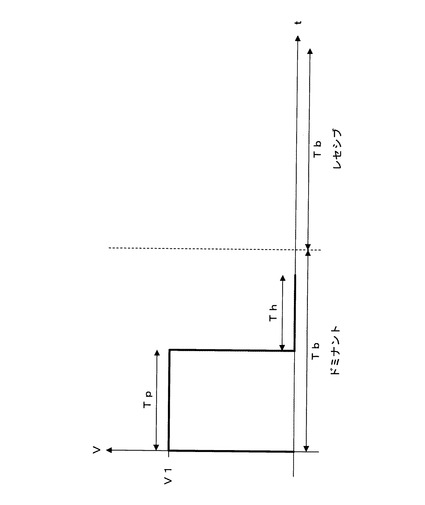
図3は、本発明に係る通信システムにおいて各ECU1が送受信する信号を説明するための模式図であり、縦軸を信号線5のツイスト線間の電位差Vとし、横軸を時間tとしたグラフである。図示の例は、送信データがドミナントからレセシブへ変化した場合の信号である。ECU1の送信部17は、ドミナントのデータ送信を行う場合、1ビットの送信時間Tbのうち開始時点から第1時間Tpまでの期間に、第1信号レベル(V1)の信号を出力した後、第2時間Thに亘って第2信号レベル(0V)の信号を出力する。なお、Tp+Th≦Tbであればよく、Tp+Th<Tbの場合には、第2時間Thの経過後から1ビットの送信時間Tbに達するまで、送信部17は信号を出力せずに端子をハイインピーダンス状態とする。また送信部17は、レセシブのデータ送信を行う場合、1ビットの送信時間Tbの全てについて信号を出力せずに端子をハイインピーダンス状態とする。
【0029】
ECU1の受信部18は、各ビットの送信時間Tbのうち開始時点から第1時間Tpに亘って、通信線5の信号レベルを所定周期でサンプリングしている。受信部18は、第1時間Tpに亘るサンプリング結果から信号レベルの平均値を算出し、算出した平均値が予め定められた閾値を超えるか否かに応じて、ドミナント/レセシブの判定を行う。
【0030】
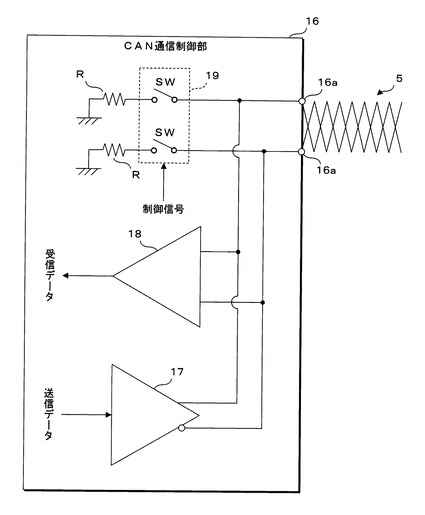
また、CAN通信制御部16は、通信を行う際に通信線5のインピーダンスマッチングを動的に行う機能を有している。図4は、CAN通信制御部16によるインピーダンスマッチングを説明するための模式図であり、CAN通信制御部16内の回路を模式的に示してある。CAN通信制御部16は、ツイスト線が接続される2つの端子16aを有している。CAN通信制御部16内には、例えば回路基板上などに、2つの端子16aに接続される2つの内部配線が敷設されている。
【0031】
この2つの内部配線は、送信部17の出力差動アンプの2つの出力端子、及び、受信部18の入力差動アンプの2つの入力端子にそれぞれ接続されている。また各内部配線は、スイッチSWを介して抵抗器Rの一端に接続され、抵抗器Rの他端は接地電位に接続されている。各抵抗器Rの抵抗値は、例えば60Ωに設定される(この抵抗値は、CANプロトコルにて伝送路の終端抵抗値として規定される120Ωの半分の値である)。2つの内部配線に接続される2つのスイッチSWを有する切替部19は、CAN通信制御部16内の制御回路(図示は省略する)などが出力する制御信号に応じて、2つのスイッチSWのオン/オフ(接続/遮断)を同時的に切り替える。
【0032】
CAN通信制御部16は、図3に示した1ビットの送信時間Tbのうち、各ビットの送信開始から第1時間Tpが経過するまでの期間、切替部19の2つのスイッチSWをオフして抵抗器Rを内部配線から切り離す。CAN通信制御部16は、第1時間Tpの終了後から1ビットの送信時間Tbが終了するまでの期間、切替部19の2つのスイッチSWをオンして抵抗器Rを内部配線に接続する。なおCAN通信制御部16による抵抗器Rの接続/遮断は、送信データがドミナント/レセシブのいずれであっても同じタイミングで行われ、データを送信しない場合(受信動作のみの場合)にも同じタイミングで行われる。また通信システム中の全てのECU1のCAN通信制御部16にて同様の処理が行われており、これによって動的なインピーダンスマッチングが実現される。
【0033】
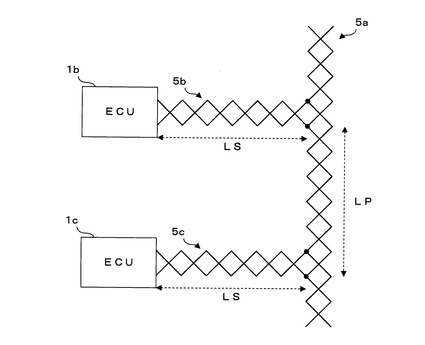
図5は、データ送信に係る第1時間Tp及び第2時間Thについて説明するための模式図であり、図1に示した通信システムに含まれる2つのECU1b、1c及びこれらを接
続する通信線5(幹線5a及び支線5b、5c)を抜き出したものである。リンギングは、一のECU1が出力した信号が他のECU1にて反射されることにより生じるため、一のECU1に対して最も隣接した(信号の伝搬距離が最も短い)他のECU1がリンギングの発生に与える影響が大きい。ここでは、図1に示した通信システムにおいて2つのECU1b及び1cが最も隣接している(即ち、通信システム中でECU1b及び1c間の距離が最も短い)ものとする。
【0034】
通信線5の幹線5aから分岐する支線5b、5cの長さをLSとし、幹線5aから分岐する支線5b、5cの分岐点間の長さをLPとした場合、2つのECU1b、1c間の距離Lは、
L=2×LS+LP
である。よって、例えばECU1bから出力された信号がECU1cにて反射されてECU1bへ戻るまでの時間Tは、通信線5の信号の伝達速度をAとした場合、
T=2×L×A
である。なお伝達速度Aは、例えばCANプロトコルにおいて5n秒/mと規定されている。
【0035】
よって、第2時間Thを上記の伝達時間T以上とすることによって、第2時間Thの間に0Vの信号出力とインピーダンスマッチングとが行われるため、リンギングを抑制することができる。即ち、第2時間Thは、
Th≧2×L×A
の条件を満たす必要がある。また上述のように、第1時間Tp及び第2時間Thは、
Tp+Th≦Tb
の条件を満たす必要がある。
【0036】
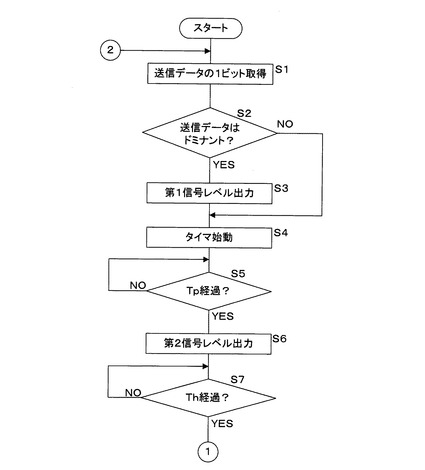
図6及び図7は、CAN通信制御部16による送信処理の手順を示すフローチャートである。CAN通信制御部16は、送信すべきデータの中から送信対象とする1ビットの情報を取得し(ステップS1)、この1ビットがドミナントであるか否かを判定する(ステップS2)。
【0037】
CAN通信制御部16は、送信対象の1ビットがドミナントである場合(S2:YES)、通信線5に対して第1信号レベルの信号出力を行い(ステップS3)、ステップS4へ処理を進める。またCAN通信制御部16は、送信対象の1ビットがドミナントでなくレセシブの場合(S2:NO)、信号出力を行わずに、ステップS4へ処理を進める。次いでCAN通信制御部16は、タイマを始動し(ステップS4)、このビットの送信処理開始から第1時間Tpが経過したか否かを判定する(ステップS5)。第1時間Tpが経過していない場合(S5:NO)、CAN通信制御部16は、タイマによる計時を継続し、第1時間Tpが経過するまで待機する。
【0038】
第1時間Tpが経過した場合(S5:YES)、CAN通信制御部16は、第2信号レベル(0V)の信号を通信線5に対して出力する(ステップS6)。その後、CAN通信制御部16は、第1時間Tpの経過から更に第2時間Thが経過したか否かを判定し(ステップS7)、第2時間Thが経過していない場合(S7:NO)、第2時間Thが経過するまで、第2信号レベルの信号を出力して待機する。第2時間Thが経過した場合(S7:YES)、CAN通信制御部16は、信号出力を停止する(ステップS8)。
【0039】
次いで、CAN通信制御部16は、1ビットの送信時間Tbが経過したか否かを判定し(ステップS9)、1ビットの送信時間Tbが経過していない場合には(S9:NO)、送信時間Tbが経過するまで待機する。1ビットの送信時間Tbが経過した場合(S9:YES)、CAN通信制御部16は、タイマを停止し(ステップS10)、送信データの
全ビットの送信を終えたか否かなどを判定することによって、送信を終了するか否かを判定する(ステップS11)。送信を終了しないと判定した場合(S11:NO)、CAN通信制御部16は、ステップS1へ処理を戻し、送信データの次のビットについて同様の処理を行う。送信を終了すると判定した場合(S11:YES)、CAN通信制御部16は、送信処理を終了する。
【0040】
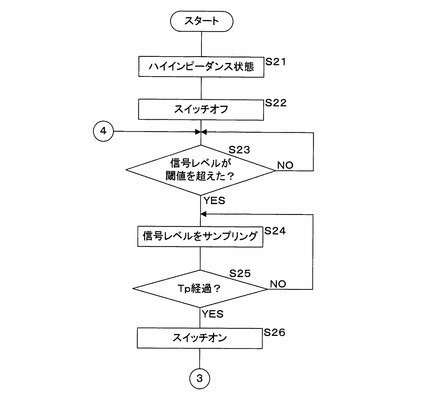
図8及び図9は、CAN通信制御部16による受信処理の手順を示すフローチャートである。CAN通信制御部16は、まず、信号出力を行わずに、端子をハイインピーダンス状態とすると共に(ステップS21)、切替部19の2つのスイッチSWをオフすることにより抵抗Rを切り離す(ステップS22)。
【0041】
次いでCAN通信制御部16は、通信線5の信号レベルが予め定められた閾値を超えたか否かを判定し(ステップS23)、信号レベルが閾値を超えない場合(S23:NO)、信号レベルが閾値を超えるまで待機する。信号レベルが閾値を超えた場合(S23:YES)、CAN通信制御部16は、通信線5の信号レベルのサンプリングを行い(ステップS24)、サンプリング開始から第1時間Tpが経過したか否かを判定する(ステップS25)。第1時間Tpが経過していない場合(S25:NO)、CAN通信制御部16は、ステップS24へ処理を戻し、第1時間Tpが経過するまで信号レベルのサンプリングを繰り返し行う。
【0042】
第1時間Tpが経過した場合(S25:YES)、CAN通信制御部16は、切替部19の2つのスイッチSWをオンすることによって抵抗器Rを接続する(ステップS26)。
【0043】
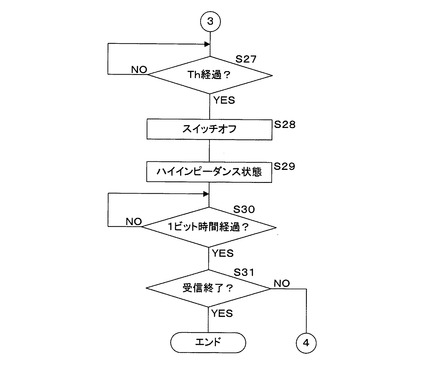
次いでCAN通信制御部16は、第1時間Tpの経過から更に第2時間Thが経過したか否かを判定し(ステップS27)、第2時間Thが経過していない場合(S27:NO)、第2時間Thが経過するまで待機する。第2時間Thが経過した場合(S27:YES)、CAN通信制御部16は、切替部19の2つのスイッチSWをオフすることにより抵抗Rを切り離し(ステップS28)、信号出力を停止して、端子をハイインピーダンス状態とする(ステップS29)。
【0044】
その後、CAN通信制御部16は、1ビットの送信時間Tbが経過したか否かを判定し(ステップS30)、1ビットの送信時間Tbが経過していない場合には(S30:NO)、この時間が経過するまで待機する。1ビットの送信時間Tbが経過した場合(S30:YES)、CAN通信制御部16は、受信データの全ビットの受信を終えたか否かなどを判定することによって、受信を終了するか否かを判定する(ステップS31)。受信を終了しないと判定した場合(S31:NO)、CAN通信制御部16は、受信データの次のビットについて同様の処理を行うため、ステップS23へ処理を戻し、ステップS23〜S31までの処理を行う。また、受信を終了すると判定した場合(S31:YES)、CAN通信制御部16は、受信処理を終了する。
【0045】
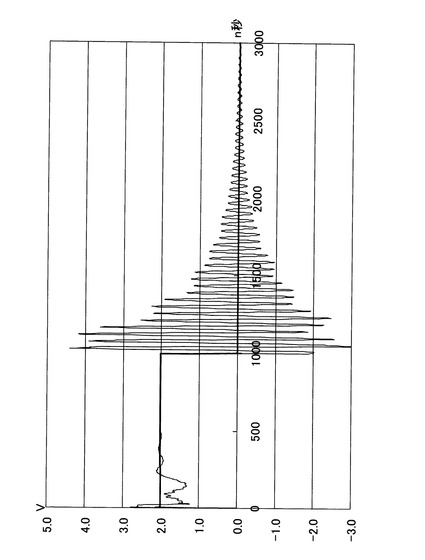
図10は、本発明に係る通信システムの効果を説明するための模式図であり、縦軸をツイスト線間の電位差とし、横軸を時間としたグラフである。図示の例は、1ビットの情報送信時間Tb=1000nsとし、0ns〜1000nsにドミナント送信を行い、1000ns〜2000nsにレセシブ送信を行った場合の波形である。またドミナント送信は、第1時間Tp=800ns且つ第1信号レベル=2V、第2時間Th=200ns且つ第2信号レベル=0Vの信号出力を行っている。
【0046】
図10に示した信号波形から、本発明の通信システムでは、図11に示した従来の通信システムの波形と比較して、リンギングの信号レベル(振幅)が低減されていることが分
かる。従来の通信システムではリンギングの信号レベルが最大で4Vを超えているのに対し、本発明の通信システムではリンギングの信号レベルの最大は約0.8V程度である。このため本発明の通信システムでは、通信線5上の信号レベルを例えば0.9V又は1.0V等の閾値にて判定することによって、ドミナント/レセシブの判定を行うことが可能である。
【0047】
以上の構成の通信システムは、ECU1の送信部17が、送信データがドミナントの場合には、第1時間Tpに亘って第1信号レベルの信号を通信線5に出力して、その後の第2時間Thに亘って第2信号レベル(0V)の信号を出力し、送信データがレセシブ且つ通信線5の信号レベルがレセシブの場合には、第1時間Tp及び第2時間Thに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、送信データがレセシブ且つ通信線5の信号レベルがドミナントの場合には、第1時間Tpに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、その後第2時間Thに亘って第2信号レベル(0V)の信号を出力する。またECU1のCAN通信制御部16は、切替部19のスイッチSWの接続/遮断を切り替えることによって、通信線5に対する抵抗器Rの接続/遮断を行うことが可能な構成であり、1ビットの送信時間Tbにおける第1時間Tp経過後に抵抗器Rの接続を行う。これらの構成により、通信システムにおいて通信線5にリンギングが発生することを抑制できるため、通信の高速化を実現することができる。
【0048】
また通信システム中の2つのECU1間の最短距離をLとし、通信線5の伝達速度をAとした場合に、第1時間Tp及び第2時間Thを、
Tp+Th≦Tb
Th≧2×L×A
の条件を満たすように設定する。これにより、一のECU1から出力された信号が他のECU1にて反射されて、反射波が一のECU1へ戻る前に、一のECU1がハイインピーダンス状態となることがないため、リンギングの発生をより確実に抑制することができる。
【0049】
なお、本実施の形態においては、通信システムが車輌に搭載されるものとしたが、これに限るものではない。また、図1に示した通信システムの構成(ECU1の数、ECU1の接続形態等)は、一例であってこれに限るものではない。また、通信線5としてツイスト線を用いる構成としたが、これに限るものではなく、1つのケーブルを通信線5として用いるなど、その他の構成であってよい。
【0050】
また、第1時間Tp及び第2時間Thは、Tp+Th≦Tbであればよいため、Tp+Th<Tbの場合には、第2時間Thの終了から1ビットの送信時間Tbが経過するまでの時間が存在する。本実施の形態においては、この時間中に切替部19のスイッチSWをオンする構成としたが、これに限るものではなく、スイッチSWをオフしてもよい。また図6及び図7に示すフローチャートは、Tp+Th<Tbの場合を想定したものであるが、これに限るものではなく、Tp+Th=Tbであってもよく、送信データがドミナントの場合にはステップS12及びS13の処理を行わなければよい。また、受信処理において信号レベルのサンプリングを第1時間Tpに亘って行う構成としたが、これに限るものではなく、第1時間Tpより短い時間に亘ってサンプリングを行う構成であってもよい。
【符号の説明】
【0051】
1、1a〜1e ECU(通信装置)
5 通信線
5a 幹線
5b〜5d 支線
11 制御部
16 CAN通信制御部(通信手段、切替制御手段)
17 送信部
18 受信部
19 切替部
R 抵抗器
SW スイッチ
【技術分野】
【0001】
本発明は、共通の通信線に接続された複数の通信装置が相互に情報の送受信を行うと共に、通信線に対する情報送信の衝突を検知することができる通信システム、通信装置及び通信方法に関する。
【背景技術】
【0002】
従来、車輌に搭載された複数の電子機器(通信装置)間の通信にはCAN(Controller
Area Network)の通信プロトコルが広く採用されている(非特許文献1、2参照)。CANの通信プロトコルでは、共通のCANバスに複数の通信装置が接続されるため、複数の通信装置が同時的に情報送信を行って衝突が発生した場合には、各通信装置にて調停処理(アービトレーション)が行われ、優先度の高い情報送信が実行される。アービトレーションを行うために、各通信装置は、CANバスに送信信号の出力を行うと同時に、CANバスの信号レベルの検出を行い、自らが出力した送信信号に対して、検出した信号の信号レベルがレセシブ(劣性値)からドミナント(優性値)に変化した場合、通信の衝突が発生したと判断し、送信処理を停止する。CANバス上の信号はレセシブよりドミナントが優位であるため、通信の衝突が発生してもドミナントを出力した電子機器は送信処理を継続して行うことができる。
【0003】
一般的に、CANの通信プロトコルを採用した通信システムでは、通信線としてツイスト線が用いられ、各通信装置が差動信号による通信を行っており、ツイスト線間の電位差が閾値を超えるものをドミナントとし、電位差が閾値を超えないものをレセシブとしている。また通信装置内のデジタル処理では、ドミナントをデータ0に対応付け、レセシブをデータ1に対応付けている。図11は、従来の通信システムにおける信号波形の一例を示す模式図であり、縦軸をツイスト線間の電位差とし、横軸を時間としたグラフである。図11に示す信号波形は、CANバス上でドミナントからレセシブへ信号を変化させた場合(0ns〜1000nsにドミナント送信、1000ns〜2000nsにレセシブ送信)の波形を示してある。図示のように、通信装置がCANバスへ出力する送信信号をドミナントからレセシブへ変化させた場合、CANバス上の信号レベル(電位差)が徐々に減衰しながら振動する波形が生じる。これは、多くの通信装置を接続するためにCANバスに多くの分岐部分を設ける必要がありこの分岐部分でのインピーダンス不整合、及び、CANバスに接続されている通信装置のインピーダンス不整合等の要因により信号反射などが繰り返されることによって生じるものであり、リンギングと呼ばれる。
【0004】
このようなリンギングが発生した場合、リンギングの信号レベルが有る程度減衰するまで、各通信装置はドミナント/レセシブの判定を行うことはできない。リンギングの信号レベルが減衰する時間は、CANバスを分岐させた分岐線の長さなどにより変化する。またリンギングの信号レベルは、CANバスに接続される通信装置の数などにより変化する。このため各通信装置は、通信システム中の通信装置の数及び分岐線の長さ等を考慮して、リンギングが十分に減衰すると考えられる時間を待機した後でドミナント/レセシブの判定を行う必要があり、CANプロトコルを用いる従来の通信システムはリンギングの影響によって通信の高速化が阻害されるという問題があった。
【0005】
特許文献1においては、通信装置のトランシーバにて、エミッタ端子がCANのHラインに接続され、コレクタ端子がCANのLラインに接続され、ベース端子がコンデンサを介してLラインに接続されたトランジスタを有する反射防止回路を設けることにより、反射信号の振幅を抑制することができる通信システムが提案されている。
【0006】
また特許文献2においては、通信装置のトランシーバにて、直列接続されたダイオード群及び逆方向に直列接続されたダイオード群を並列接続したものに抵抗を直列接続した回路を、CANバスの2つのライン間に設けることにより、信号の反射を抑制することができる通信システムが提案されている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】ISO 11898−1:2003 Road vehicles--Controller area network(CAN)--Part1:Datalink layer and physical signaling
【非特許文献2】ISO 11519−1:1994 Road vehicles--Low-speed serial data communication--Part1:Generaland definitions
【特許文献】
【0008】
【特許文献1】特開2010−200006号公報
【特許文献2】特開2010−206267号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら特許文献1、2に記載の通信システムは、CANバスの2つのライン間に信号反射を抑制するための簡単な回路を追加したのみの構成であり、このような構成ではリンギングの抑制効果にも自ずと限界があった。
【0010】
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、リンギングの影響を低減し、通信の高速化を実現可能な通信システム、通信装置及び通信方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る通信システムは、共通の通信線を介して接続された複数の通信装置を備え、各通信装置が、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段をそれぞれ有する通信システムにおいて、前記通信手段は、送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあることを特徴とする。
【0012】
また、本発明に係る通信システムは、前記通信装置が、一端が固定電位に接続された抵抗器の他端を、前記通信線に対して接続/遮断する切替部と、前記1ビット分の情報送信時間において前記第1時間Tpが経過した後に、前記抵抗器を接続するよう前記切替部の制御を行う切替制御手段とを備えることを特徴とする。
【0013】
また、本発明に係る通信システムは、前記第1時間Tp及び前記第2時間Thが、Tp+Th≦Tb、Th≧2×L×Aの条件を満たすこと(ただし、前記Tbは前記1ビット分の情報送信時間であり、前記Lは一の通信装置から他の通信装置までに介在する前記通信線の最短距離であり、前記Aは前記通信線における信号の伝達速度である。)を特徴とする。
【0014】
また、本発明に係る通信装置は、共通の通信線を介して他の装置に接続され、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段を備える通信装置において、前記通信手段は、送信する情報の優性値に
対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあることを特徴とする。
【0015】
また、本発明に係る通信方法は、共通の通信線を介して、各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信方法において、送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、送信する情報の劣性値に対して、前記通信線への信号出力を行わないことを特徴とする。
【0016】
従来のCANにおいて図11に示したようなリンギングは、通信装置の送信をドミナントからレセシブに変化させた場合に発生する。通信装置は、ドミナントの送信として通信線にハイレベルの信号(所定の電位差の信号)を出力し、その後、レセシブになりハイインピーダンス状態となる。一の通信装置によるドミナントからレセシブへの信号変化は、レセシブ(ハイインピーダンス状態)の他の通信装置にて反射され、この反射がレセシブへ移行した一の通信装置にて更に反射されることによって多重反射が発生し、リンギングとなる。
そこで本発明においては、送信する情報がドミナント(優性値)の場合、通信装置は、1ビット分の情報送信時間に対して、この時間よりも短い第1時間に亘る第1信号レベルの信号を出力した後、第2時間に亘る第2信号レベル(<第1信号レベル)の信号を通信線へ出力する。即ち通信装置は、ドミナントに対して第1信号レベルから第2信号レベルへ変化するパルス状の信号を出力する。また送信する情報がレセシブ(劣性値)の場合、通信装置は、通信線への信号出力を行わない(ハイインピーダンス状態となる)。
これにより、ドミナントの送信とレセシブの送信とが同時的に存在した場合、通信線上には第1信号レベルから第2信号レベルへ変化するパルス状の信号が観測されるため、レセシブを送信した通信装置は通信線上の信号を検出することによって、ドミナントを送信した通信装置の存在を検知することができる。なおレセシブを送信した通信装置は、第1信号レベルの時間が経過した後、第2信号レベルの区間にてインピーダンスマッチングを行うことにより、反射信号の発生を抑制することができる。
また通信装置が送信する情報をドミナントからレセシブへ変化させた場合、第1信号レベルから第2信号レベルへ信号レベルを低下させた後にハイインピーダンス状態へ移行する。このため通信線にて反射される信号の振幅を低減することができ、更に第2信号レベルを略0Vとすることで、反射信号の振幅を略0Vとすることができるため、リンギングの発生を抑制できる。
これにより、通信装置がドミナントを送信した次のビットにおけるリンギングの影響を低減できるため、各ビットにおいてドミナント/レセシブの判定を早いタイミングで行うことが可能となる。よって、通信の高速化が実現できる。
【0017】
複数の通信装置が共通の通信線を介して通信を行うシステムでは、主の通信線(幹線)を分岐させて支線を設け、この幹線又は支線の端部に通信装置がそれぞれ接続される。本発明においては、各通信装置が接続される通信線に対して、接地電位などの固定電位に接続された抵抗器を接続/遮断するスイッチなどの切替部を設ける。また各通信装置は、1ビット送信時間における第1時間経過後に抵抗器を接続するよう切替部の制御を行う。これにより通信システム中の各通信装置は、1ビット送信時間における第1時間経過後に通信線に対する抵抗器の接続を行い、この抵抗器によるインピーダンスマッチングを行うことができる。これにより、リンギング発生の要因であるインピーダンスの不整合を解消でき、リンギングの発生を抑制できる。
【0018】
リンギングは一の通信装置が出力した信号が他の通信装置にて反射されることにより生じるため、一の通信装置に対して最も隣接した(信号が伝搬する通信線の距離が最も短い)他の通信装置が、リンギングの発生に与える影響が大きい。
そこで本発明においては、通信システムに含まれる2つの通信装置間に介在する通信線の最短距離をLとし、通信線の伝達速度をAとした場合に、第2時間Thを
Th≧2×L×A
の条件を満たすように設定する。なお2×Lは2つの通信装置間の往復距離であり、2×L×Aは一の通信装置から出力された信号が他の通信装置にて反射されて一の通信装置へ戻るまでの時間である。この時間以上に第2時間Thを設定することによって、反射波が一の通信装置へ戻る前に、抵抗器によるインピーダンスマッチングを行うことにより、一の通信装置がハイインピーダンス状態へ移行することがなく、リンギングの発生を確実に抑制できる。
また第1の時間Tpは、1ビット分の情報送信時間をTbとした場合、
Tp+Th≦Tb
の条件を満たすように設定する必要がある。
【発明の効果】
【0019】
本発明による場合は、通信装置がドミナントの情報送信に対して、第1時間に亘る第1信号レベルの信号出力の後、第2時間に亘る第2信号レベルの信号出力を行う構成とすることにより、送信データの1ビット以内にリンギングの発生を抑制することができるため、各ビットにおけるドミナント/レセシブの判定を早いタイミングで行うことが可能となり、CANプロトコルのようなアービトレーションを行う通信を高速化することができる。
【図面の簡単な説明】
【0020】
【図1】通信システムの一構成例を示す模式図である。
【図2】通信装置の構成を示すブロック図である。
【図3】本発明に係る通信システムにおいて各ECUが送受信する信号を説明するための模式図である。
【図4】CAN通信制御部によるインピーダンスマッチングを説明するための模式図である。
【図5】データ送信に係る第1時間及び第2時間について説明するための模式図である。
【図6】CAN通信制御部による送信処理の手順を示すフローチャートである。
【図7】CAN通信制御部による送信処理の手順を示すフローチャートである。
【図8】CAN通信制御部による受信処理の手順を示すフローチャートである。
【図9】CAN通信制御部による受信処理の手順を示すフローチャートである。
【図10】本発明に係る通信システムの効果を説明するための模式図である。
【図11】従来の通信システムにおける信号波形の一例を示す模式図である。
【発明を実施するための形態】
【0021】
以下、本発明をその実施の形態を示す図面に基づき具体的に説明する。図1は、通信システムの一構成例を示す模式図である。本実施の形態に係る通信システムは、例えば図示しない車輌に搭載された複数のECU(Electronic Control Unit)1を通信装置として備え、複数のECU1が共通の通信線5を介して接続された構成である。なお、図1においては、複数のECU1にそれぞれ1a〜1eの符号を付して区別すると共に、通信線5を幹線5a及び支線5b〜5dに区別して図示してある。即ち、図示の通信システムは、ECU1a及び1eが幹線5aを介して接続され、通信線5の幹線5aから分岐した3つの支線5b〜5dにそれぞれECU1b〜1dが接続された構成である。
【0022】
例えばECU1bにて通信線5の支線5bへ信号が出力された場合、この信号は支線5bから幹線5a、支線5cを経てECU1cへ至り、ECU1cの端子部などにて反射された反射波が支線5c、幹線5a、支線5bを経てECU1bへ至る(図1中の破線の矢印参照)。また図1において図示は省略するが、ECU1dにおいても同様の反射波が発生する。このような信号の反射が繰り返されることによって、図11に示したようなリンギングとなる。なお、支線5b〜5dの距離が長くなると、信号の出力元へ反射波が戻るまでの時間が長くなるため、リンギングの周期が長くなり、リンギングが継続する時間(減衰までに要する時間)が長くなる。また通信線5の支線5b〜5dの数が多くなる(ECU1の数が多くなる)と、反射波の発生箇所が増加するため、リンギングの振幅が大きくなり、リンギングが減衰するまでに要する時間が長くなる。
【0023】
図2は、通信装置(ECU1)の構成を示すブロック図である。ECU1は、制御部11、ROM(Read Only Memory)12、RAM(Random Access Memory)13、入力部14、出力部15及びCAN通信制御部16等を備えて構成されている。制御部11は、CPU(Central Processing Unit)又はMPU(MicroProcessing Unit)等の演算処理装置を用いて構成されるものであり、ROM12に記憶された制御プログラムを読み出して実行することにより種々の制御処理を行うことができる。
【0024】
ROM12は、例えばEEPROM(Electrically Erasable Programmable ROM)又はフラッシュメモリ等の不揮発性のメモリ素子で構成されるものであり、制御部11にて実行される制御プログラム及び制御部11が行う処理に必要な情報等が予め記憶されている。RAM13は、例えばSRAM(Static RAM)又はDRAM(Dynamic RAM)等のメモリ素子で構成されるものであり、制御部11の処理に伴って生成された情報及び他のECU1との間で送受信する情報等の種々の情報が記憶される。
【0025】
入力部14は、例えば車輌の車速センサ若しくは温度センサ等のセンサ、又は、車輌の内外に配置された操作用の種々のスイッチ等の入力装置からの信号が入力され、入力信号のサンプリング又はA/D変換等の処理を行って得られた情報を制御部11へ与える。出力部15は、例えばモータ又はランプ等の負荷が接続され、制御部11からの指示に応じてこれらの負荷を駆動する駆動信号を出力する。なお、ECU1は必ずしも入力部14及び出力部15の両方を備える必要はなく、いずれか一方のみを備える構成であってよい。
【0026】
CAN通信制御部16は、通信線5に接続される端子を有しており、この端子に接続された通信線5を介して他のECU1との間でCANプロトコルに従った情報の送受信を行うものである。CAN通信制御部16は、制御部11から与えられた送信情報をCANプロトコルに応じた送信用のデータ(フレーム)に変換して送信部17へ与える。CAN通信制御部16の送信部17は、与えられた送信データの各ビットの値(0(ドミナント)又は1(レセシブ))に応じて、通信線5へ信号を出力する。なおCANプロトコルにおいては、通信線5としてツイスト線が用いられ、送信部17は通信線5へ差動信号を出力する。送信部17は、複数ビットで構成された送信データの各ビットについて順に処理を行い、処理対象ビットの値がドミナントの場合には、所定の第1時間に亘って第1信号レベルの信号を出力した後、所定の第2時間に亘って第2信号レベル(<第1信号レベル)の信号を出力する。また送信部17は、処理対象ビットの値がレセシブの場合、端子をハイインピーダンス状態とする。
【0027】
またCAN通信制御部16は、通信線5の信号レベル(ツイスト線の電位差)を検知することによって、通信線5上に送信された信号がドミナント/レセシブのいずれに対応する信号であるかを判定し、各ビットがドミナント/レセシブで表されるデータの受信を行う受信部18を有している。CAN通信制御部16は、受信部18にて受信したデータを制御部11へ与える。またCAN通信制御部16は、送信部17にて自らが送信したデー
タを受信部18にて受信し、送信データと受信データとが一致しない場合(送信データのレセシブが受信データにてドミナントに変化していた場合)、通信線5に接続された他のECU1の送信が発生していることを検知し、アービトレーションの処理を行う。なおECU1が行うアービトレーションの処理は、従来のCANプロトコルによるものと同じであるため、詳細な説明を省略する。
【0028】
図3は、本発明に係る通信システムにおいて各ECU1が送受信する信号を説明するための模式図であり、縦軸を信号線5のツイスト線間の電位差Vとし、横軸を時間tとしたグラフである。図示の例は、送信データがドミナントからレセシブへ変化した場合の信号である。ECU1の送信部17は、ドミナントのデータ送信を行う場合、1ビットの送信時間Tbのうち開始時点から第1時間Tpまでの期間に、第1信号レベル(V1)の信号を出力した後、第2時間Thに亘って第2信号レベル(0V)の信号を出力する。なお、Tp+Th≦Tbであればよく、Tp+Th<Tbの場合には、第2時間Thの経過後から1ビットの送信時間Tbに達するまで、送信部17は信号を出力せずに端子をハイインピーダンス状態とする。また送信部17は、レセシブのデータ送信を行う場合、1ビットの送信時間Tbの全てについて信号を出力せずに端子をハイインピーダンス状態とする。
【0029】
ECU1の受信部18は、各ビットの送信時間Tbのうち開始時点から第1時間Tpに亘って、通信線5の信号レベルを所定周期でサンプリングしている。受信部18は、第1時間Tpに亘るサンプリング結果から信号レベルの平均値を算出し、算出した平均値が予め定められた閾値を超えるか否かに応じて、ドミナント/レセシブの判定を行う。
【0030】
また、CAN通信制御部16は、通信を行う際に通信線5のインピーダンスマッチングを動的に行う機能を有している。図4は、CAN通信制御部16によるインピーダンスマッチングを説明するための模式図であり、CAN通信制御部16内の回路を模式的に示してある。CAN通信制御部16は、ツイスト線が接続される2つの端子16aを有している。CAN通信制御部16内には、例えば回路基板上などに、2つの端子16aに接続される2つの内部配線が敷設されている。
【0031】
この2つの内部配線は、送信部17の出力差動アンプの2つの出力端子、及び、受信部18の入力差動アンプの2つの入力端子にそれぞれ接続されている。また各内部配線は、スイッチSWを介して抵抗器Rの一端に接続され、抵抗器Rの他端は接地電位に接続されている。各抵抗器Rの抵抗値は、例えば60Ωに設定される(この抵抗値は、CANプロトコルにて伝送路の終端抵抗値として規定される120Ωの半分の値である)。2つの内部配線に接続される2つのスイッチSWを有する切替部19は、CAN通信制御部16内の制御回路(図示は省略する)などが出力する制御信号に応じて、2つのスイッチSWのオン/オフ(接続/遮断)を同時的に切り替える。
【0032】
CAN通信制御部16は、図3に示した1ビットの送信時間Tbのうち、各ビットの送信開始から第1時間Tpが経過するまでの期間、切替部19の2つのスイッチSWをオフして抵抗器Rを内部配線から切り離す。CAN通信制御部16は、第1時間Tpの終了後から1ビットの送信時間Tbが終了するまでの期間、切替部19の2つのスイッチSWをオンして抵抗器Rを内部配線に接続する。なおCAN通信制御部16による抵抗器Rの接続/遮断は、送信データがドミナント/レセシブのいずれであっても同じタイミングで行われ、データを送信しない場合(受信動作のみの場合)にも同じタイミングで行われる。また通信システム中の全てのECU1のCAN通信制御部16にて同様の処理が行われており、これによって動的なインピーダンスマッチングが実現される。
【0033】
図5は、データ送信に係る第1時間Tp及び第2時間Thについて説明するための模式図であり、図1に示した通信システムに含まれる2つのECU1b、1c及びこれらを接
続する通信線5(幹線5a及び支線5b、5c)を抜き出したものである。リンギングは、一のECU1が出力した信号が他のECU1にて反射されることにより生じるため、一のECU1に対して最も隣接した(信号の伝搬距離が最も短い)他のECU1がリンギングの発生に与える影響が大きい。ここでは、図1に示した通信システムにおいて2つのECU1b及び1cが最も隣接している(即ち、通信システム中でECU1b及び1c間の距離が最も短い)ものとする。
【0034】
通信線5の幹線5aから分岐する支線5b、5cの長さをLSとし、幹線5aから分岐する支線5b、5cの分岐点間の長さをLPとした場合、2つのECU1b、1c間の距離Lは、
L=2×LS+LP
である。よって、例えばECU1bから出力された信号がECU1cにて反射されてECU1bへ戻るまでの時間Tは、通信線5の信号の伝達速度をAとした場合、
T=2×L×A
である。なお伝達速度Aは、例えばCANプロトコルにおいて5n秒/mと規定されている。
【0035】
よって、第2時間Thを上記の伝達時間T以上とすることによって、第2時間Thの間に0Vの信号出力とインピーダンスマッチングとが行われるため、リンギングを抑制することができる。即ち、第2時間Thは、
Th≧2×L×A
の条件を満たす必要がある。また上述のように、第1時間Tp及び第2時間Thは、
Tp+Th≦Tb
の条件を満たす必要がある。
【0036】
図6及び図7は、CAN通信制御部16による送信処理の手順を示すフローチャートである。CAN通信制御部16は、送信すべきデータの中から送信対象とする1ビットの情報を取得し(ステップS1)、この1ビットがドミナントであるか否かを判定する(ステップS2)。
【0037】
CAN通信制御部16は、送信対象の1ビットがドミナントである場合(S2:YES)、通信線5に対して第1信号レベルの信号出力を行い(ステップS3)、ステップS4へ処理を進める。またCAN通信制御部16は、送信対象の1ビットがドミナントでなくレセシブの場合(S2:NO)、信号出力を行わずに、ステップS4へ処理を進める。次いでCAN通信制御部16は、タイマを始動し(ステップS4)、このビットの送信処理開始から第1時間Tpが経過したか否かを判定する(ステップS5)。第1時間Tpが経過していない場合(S5:NO)、CAN通信制御部16は、タイマによる計時を継続し、第1時間Tpが経過するまで待機する。
【0038】
第1時間Tpが経過した場合(S5:YES)、CAN通信制御部16は、第2信号レベル(0V)の信号を通信線5に対して出力する(ステップS6)。その後、CAN通信制御部16は、第1時間Tpの経過から更に第2時間Thが経過したか否かを判定し(ステップS7)、第2時間Thが経過していない場合(S7:NO)、第2時間Thが経過するまで、第2信号レベルの信号を出力して待機する。第2時間Thが経過した場合(S7:YES)、CAN通信制御部16は、信号出力を停止する(ステップS8)。
【0039】
次いで、CAN通信制御部16は、1ビットの送信時間Tbが経過したか否かを判定し(ステップS9)、1ビットの送信時間Tbが経過していない場合には(S9:NO)、送信時間Tbが経過するまで待機する。1ビットの送信時間Tbが経過した場合(S9:YES)、CAN通信制御部16は、タイマを停止し(ステップS10)、送信データの
全ビットの送信を終えたか否かなどを判定することによって、送信を終了するか否かを判定する(ステップS11)。送信を終了しないと判定した場合(S11:NO)、CAN通信制御部16は、ステップS1へ処理を戻し、送信データの次のビットについて同様の処理を行う。送信を終了すると判定した場合(S11:YES)、CAN通信制御部16は、送信処理を終了する。
【0040】
図8及び図9は、CAN通信制御部16による受信処理の手順を示すフローチャートである。CAN通信制御部16は、まず、信号出力を行わずに、端子をハイインピーダンス状態とすると共に(ステップS21)、切替部19の2つのスイッチSWをオフすることにより抵抗Rを切り離す(ステップS22)。
【0041】
次いでCAN通信制御部16は、通信線5の信号レベルが予め定められた閾値を超えたか否かを判定し(ステップS23)、信号レベルが閾値を超えない場合(S23:NO)、信号レベルが閾値を超えるまで待機する。信号レベルが閾値を超えた場合(S23:YES)、CAN通信制御部16は、通信線5の信号レベルのサンプリングを行い(ステップS24)、サンプリング開始から第1時間Tpが経過したか否かを判定する(ステップS25)。第1時間Tpが経過していない場合(S25:NO)、CAN通信制御部16は、ステップS24へ処理を戻し、第1時間Tpが経過するまで信号レベルのサンプリングを繰り返し行う。
【0042】
第1時間Tpが経過した場合(S25:YES)、CAN通信制御部16は、切替部19の2つのスイッチSWをオンすることによって抵抗器Rを接続する(ステップS26)。
【0043】
次いでCAN通信制御部16は、第1時間Tpの経過から更に第2時間Thが経過したか否かを判定し(ステップS27)、第2時間Thが経過していない場合(S27:NO)、第2時間Thが経過するまで待機する。第2時間Thが経過した場合(S27:YES)、CAN通信制御部16は、切替部19の2つのスイッチSWをオフすることにより抵抗Rを切り離し(ステップS28)、信号出力を停止して、端子をハイインピーダンス状態とする(ステップS29)。
【0044】
その後、CAN通信制御部16は、1ビットの送信時間Tbが経過したか否かを判定し(ステップS30)、1ビットの送信時間Tbが経過していない場合には(S30:NO)、この時間が経過するまで待機する。1ビットの送信時間Tbが経過した場合(S30:YES)、CAN通信制御部16は、受信データの全ビットの受信を終えたか否かなどを判定することによって、受信を終了するか否かを判定する(ステップS31)。受信を終了しないと判定した場合(S31:NO)、CAN通信制御部16は、受信データの次のビットについて同様の処理を行うため、ステップS23へ処理を戻し、ステップS23〜S31までの処理を行う。また、受信を終了すると判定した場合(S31:YES)、CAN通信制御部16は、受信処理を終了する。
【0045】
図10は、本発明に係る通信システムの効果を説明するための模式図であり、縦軸をツイスト線間の電位差とし、横軸を時間としたグラフである。図示の例は、1ビットの情報送信時間Tb=1000nsとし、0ns〜1000nsにドミナント送信を行い、1000ns〜2000nsにレセシブ送信を行った場合の波形である。またドミナント送信は、第1時間Tp=800ns且つ第1信号レベル=2V、第2時間Th=200ns且つ第2信号レベル=0Vの信号出力を行っている。
【0046】
図10に示した信号波形から、本発明の通信システムでは、図11に示した従来の通信システムの波形と比較して、リンギングの信号レベル(振幅)が低減されていることが分
かる。従来の通信システムではリンギングの信号レベルが最大で4Vを超えているのに対し、本発明の通信システムではリンギングの信号レベルの最大は約0.8V程度である。このため本発明の通信システムでは、通信線5上の信号レベルを例えば0.9V又は1.0V等の閾値にて判定することによって、ドミナント/レセシブの判定を行うことが可能である。
【0047】
以上の構成の通信システムは、ECU1の送信部17が、送信データがドミナントの場合には、第1時間Tpに亘って第1信号レベルの信号を通信線5に出力して、その後の第2時間Thに亘って第2信号レベル(0V)の信号を出力し、送信データがレセシブ且つ通信線5の信号レベルがレセシブの場合には、第1時間Tp及び第2時間Thに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、送信データがレセシブ且つ通信線5の信号レベルがドミナントの場合には、第1時間Tpに亘って通信線5へ信号出力をせずハイインピーダンス状態とし、その後第2時間Thに亘って第2信号レベル(0V)の信号を出力する。またECU1のCAN通信制御部16は、切替部19のスイッチSWの接続/遮断を切り替えることによって、通信線5に対する抵抗器Rの接続/遮断を行うことが可能な構成であり、1ビットの送信時間Tbにおける第1時間Tp経過後に抵抗器Rの接続を行う。これらの構成により、通信システムにおいて通信線5にリンギングが発生することを抑制できるため、通信の高速化を実現することができる。
【0048】
また通信システム中の2つのECU1間の最短距離をLとし、通信線5の伝達速度をAとした場合に、第1時間Tp及び第2時間Thを、
Tp+Th≦Tb
Th≧2×L×A
の条件を満たすように設定する。これにより、一のECU1から出力された信号が他のECU1にて反射されて、反射波が一のECU1へ戻る前に、一のECU1がハイインピーダンス状態となることがないため、リンギングの発生をより確実に抑制することができる。
【0049】
なお、本実施の形態においては、通信システムが車輌に搭載されるものとしたが、これに限るものではない。また、図1に示した通信システムの構成(ECU1の数、ECU1の接続形態等)は、一例であってこれに限るものではない。また、通信線5としてツイスト線を用いる構成としたが、これに限るものではなく、1つのケーブルを通信線5として用いるなど、その他の構成であってよい。
【0050】
また、第1時間Tp及び第2時間Thは、Tp+Th≦Tbであればよいため、Tp+Th<Tbの場合には、第2時間Thの終了から1ビットの送信時間Tbが経過するまでの時間が存在する。本実施の形態においては、この時間中に切替部19のスイッチSWをオンする構成としたが、これに限るものではなく、スイッチSWをオフしてもよい。また図6及び図7に示すフローチャートは、Tp+Th<Tbの場合を想定したものであるが、これに限るものではなく、Tp+Th=Tbであってもよく、送信データがドミナントの場合にはステップS12及びS13の処理を行わなければよい。また、受信処理において信号レベルのサンプリングを第1時間Tpに亘って行う構成としたが、これに限るものではなく、第1時間Tpより短い時間に亘ってサンプリングを行う構成であってもよい。
【符号の説明】
【0051】
1、1a〜1e ECU(通信装置)
5 通信線
5a 幹線
5b〜5d 支線
11 制御部
16 CAN通信制御部(通信手段、切替制御手段)
17 送信部
18 受信部
19 切替部
R 抵抗器
SW スイッチ
【特許請求の範囲】
【請求項1】
共通の通信線を介して接続された複数の通信装置を備え、各通信装置が、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段をそれぞれ有する通信システムにおいて、
前記通信手段は、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあること
を特徴とする通信システム。
【請求項2】
前記通信装置は、
一端が固定電位に接続された抵抗器の他端を、前記通信線に対して接続/遮断する切替部と、
前記1ビット分の情報送信時間において前記第1時間Tpが経過した後に、前記抵抗器を接続するよう前記切替部の制御を行う切替制御手段と
を備えること
を特徴とする請求項1に記載の通信システム。
【請求項3】
前記第1時間Tp及び前記第2時間Thは、
Tp+Th≦Tb
Th≧2×L×A
の条件を満たすこと
(ただし、前記Tbは前記1ビット分の情報送信時間であり、前記Lは一の通信装置から他の通信装置までに介在する前記通信線の最短距離であり、前記Aは前記通信線における信号の伝達速度である。)
を特徴とする請求項1又は請求項2に記載の通信システム。
【請求項4】
共通の通信線を介して他の装置に接続され、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段を備える通信装置において、
前記通信手段は、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあること
を特徴とする通信装置。
【請求項5】
共通の通信線を介して、各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信方法において、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないこと
を特徴とする通信方法。
【請求項1】
共通の通信線を介して接続された複数の通信装置を備え、各通信装置が、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段をそれぞれ有する通信システムにおいて、
前記通信手段は、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあること
を特徴とする通信システム。
【請求項2】
前記通信装置は、
一端が固定電位に接続された抵抗器の他端を、前記通信線に対して接続/遮断する切替部と、
前記1ビット分の情報送信時間において前記第1時間Tpが経過した後に、前記抵抗器を接続するよう前記切替部の制御を行う切替制御手段と
を備えること
を特徴とする請求項1に記載の通信システム。
【請求項3】
前記第1時間Tp及び前記第2時間Thは、
Tp+Th≦Tb
Th≧2×L×A
の条件を満たすこと
(ただし、前記Tbは前記1ビット分の情報送信時間であり、前記Lは一の通信装置から他の通信装置までに介在する前記通信線の最短距離であり、前記Aは前記通信線における信号の伝達速度である。)
を特徴とする請求項1又は請求項2に記載の通信システム。
【請求項4】
共通の通信線を介して他の装置に接続され、前記通信線を介して各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信手段を備える通信装置において、
前記通信手段は、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないようにしてあること
を特徴とする通信装置。
【請求項5】
共通の通信線を介して、各ビットが優性値又は劣性値の2値で表される連続した複数ビットの情報を送受信する通信方法において、
送信する情報の優性値に対して、1ビット分の情報送信時間より短い第1時間Tpに亘って第1信号レベルの信号を出力した後、前記情報送信時間より短い第2時間Thに亘って前記第1信号レベルより低い第2信号レベルの信号を出力し、
送信する情報の劣性値に対して、前記通信線への信号出力を行わないこと
を特徴とする通信方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−98871(P2013−98871A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241621(P2011−241621)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(504255685)国立大学法人京都工芸繊維大学 (203)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(504255685)国立大学法人京都工芸繊維大学 (203)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]