
通信システム
【課題】
小型化、低コスト化が実現できる通信システムを提供する。
【解決手段】
送信側ユニットは、アナログ信号を、該アナログ信号レベルの全レンジ域中の第1のレンジ域のアナログ信号については、1ビット当たりのアナログ信号レベルである第1の分解能の第1のデジタル信号に変換し、全レンジ域中の第2のレンジ域のアナログ信号については、第1の分解能よりも大きな第2の分解能の第1のデジタル信号に変換する第1の変換手段と、第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備する。受信側ユニットは、第1のデジタル信号を受信する第2の通信手段と、第2の通信手段が受信した第1のデジタル信号が第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、第1及び第2の分解能に基づいて、第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備する。
小型化、低コスト化が実現できる通信システムを提供する。
【解決手段】
送信側ユニットは、アナログ信号を、該アナログ信号レベルの全レンジ域中の第1のレンジ域のアナログ信号については、1ビット当たりのアナログ信号レベルである第1の分解能の第1のデジタル信号に変換し、全レンジ域中の第2のレンジ域のアナログ信号については、第1の分解能よりも大きな第2の分解能の第1のデジタル信号に変換する第1の変換手段と、第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備する。受信側ユニットは、第1のデジタル信号を受信する第2の通信手段と、第2の通信手段が受信した第1のデジタル信号が第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、第1及び第2の分解能に基づいて、第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、送信側ユニットと受信側ユニットとを有する通信システムに関し、例えば、車両等に搭載される慣性センサユニット及びコントロールユニット間の通信システムに関する。
【背景技術】
【0002】
車両や飛行体等の位置や姿勢の観測のために、角速度及び加速度等の測定が行われ、そのために、角速度センサや加速度センサ等を有する慣性センサが用いられている。慣性センサにより角速度センサや加速度センサ等からのアナログ信号がデジタル信号に変換されてから、CPUにより車両や飛行体等の位置、姿勢及び速度制御が行われる。
【0003】
位置、姿勢及び速度制御では、各制御内容に応じた分解能が必要とされる。例えば、車両制御としては、横滑り制御等の車両安定制御においては、低分解能広域の角速度等が必要とされ、アダプティプクルーズコントロール等の常用制御においては、高分解能狭域の角速度等が必要とされる。
【0004】
先行技術文献としては、以下の特許文献1がある。特許文献1には、ヨーレートセンサの測定結果の妥当性をチェックするべく、測定範囲全体を検出範囲とするヨーレートセンサと1個又は複数の一部の測定範囲を検出範囲とするヨーレートセンサを設け、これらのヨーレートセンサの測定結果及び測定量の相関関係などから測定結果の妥当性をチェックすることが記載されている。
【特許文献1】特表平11−509155号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、異なる分解能のセンサ及びセンサのアナログ信号出力をデジタル信号に変換する信号処理素子を複数個設け、各デジタル信号を別々のシリアルラインでマイクロコンピュータの入力ポートに入力する場合には、センサ及び信号処理素子を含む慣性センサのコストがかかり、慣性センサ及びマイクロコンピュータを含む慣性センサユニットのサイズが大きくなるという問題点がある。また、特許文献1では異なる分解能の慣性センサを複数個設け、その出力をマイクロコンピュータの別々のポートに入力して処理していたために、同様の問題点がある。
【0006】
また、アナログ信号レベルの全域を高分解能のデジタル信号に変換する場合は、処理するデジタル信号のビット数が多くなること、及び慣性センサユニットからコントロールユニットにネットワークを通してそのデジタル信号を通信する際のデータ量が多くなり通信量が増大することから、慣性センサユニットやコントロールユニットが備えるマイクロコンピュータに高性能なものが要求され、コストもサイズも大きくなるという問題があった。
【0007】
本発明は、上記問題点に鑑みてなされたものであり、分解能をレンジ毎に設定して、デジタル信号に変換することにより、小型化、低コスト化が実現できる通信システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1記載の発明によれば、送信側ユニット及び受信側ユニットを有する通信システムであって、前記送信側ユニットは、被変換信号を、該被変換信号レベルの全レンジ域中の第1のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルである第1の分解能の第1のデジタル信号に変換し、前記全レンジ域中の第2のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルであって前記第1の分解能とは異なる第2の分解能の第1のデジタル信号に変換する第1の変換手段と、前記第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備し、前記受信側ユニットは、前記第1のデジタル信号を受信する第2の通信手段と、前記第2の通信手段が受信した前記第1のデジタル信号が前記第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、前記第1及び第2の分解能に基づいて、前記第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備したことを特徴とする通信システムが提供される。
【0009】
請求項2記載の発明によれば、請求項1記載の発明において、前記送信側ユニットは、検出対象物の角速度又は加速度を前記検出対象物の慣性力として検出し、該検出した慣性力をアナログ信号で出力する検出素子部及び前記検出素子部の出力をデジタル信号に変換する信号処理素子部を有し、検出対象物に取付けられ、慣性力に応じたデジタル信号を出力する慣性センサと前記デジタル信号を処理する演算部とを備えた慣性センサユニットであり、前記受信側ユニットは、前記第2のデジタル信号に基づいて前記検出対象物を制御するコントロールユニットであることを特徴とする通信システムが提供される。
【0010】
請求項3記載の発明によれば、請求項2記載の発明において、前記第1のレンジ域は、前記検出素子部が検出する前記角速度又は前記加速度の零を中心に正負均等な範囲に対応することを特徴とする通信システムが提供される。
【発明の効果】
【0011】
請求項1記載の発明によれば、第1のレンジ域の被変換信号については、第1の分解能、例えば、高分解能な第1のデジタル信号に変換し、第2のレンジ域の被変換信号については、第2の分解能、例えば、低分解能な第1のデジタル信号に変換するので、レンジ巾を守ったままデジタル信号のビット長を短くすることができ、受信側ユニットへ送信するデータ量を少なくすることができる。更に、処理する第1のデジタル信号のビット長を短くできるので、送信側ユニット及び受信側ユニットのコストを低減することができる。
【0012】
請求項2記載の発明によれば、処理する第1のデジタル信号のビット数が短くなり、慣性センサユニット及びコントロールユニット間の通信量を低減することができ、慣性センサユニット及びコントロールユニットのコスト及びサイズを小さくすることができる。
【0013】
請求項3記載の発明によれば、第1のレンジ域は、検出素子部が検出する角速度又は加速度の零を中心に正負均等な範囲に対応するので、角速度が零を中心に正負均等な範囲に高分解能が要求されるアダプティブコントロール等の要求を満たすことができ、車両等に搭載される慣性センサユニット並びにコントロールユニットのコスト及びサイズを低減することができる。
【発明を実施するための最良の形態】
【0014】
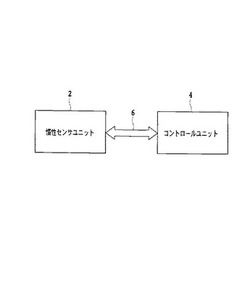
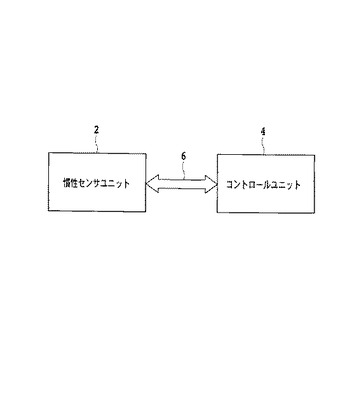
図1は本発明の実施形態による通信システムの一例を示す構成図である。図1に示すように、通信システムは、送信ユニットとしての慣性センサユニット2、コントロールユニット4、並びに慣性センサユニット2及びコントロールユニット4間の双方向通信を行うためのCAN6(Controller Area Network)を有する。
【0015】
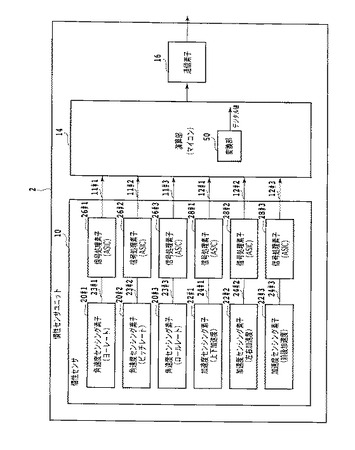
図2は図1中の慣性センサユニットの構成図である。慣性センサユニット2は、車両や飛行機等の検出対象物に取り付けられる。図2に示すように、慣性センサユニット2は、ハウジング内に収容された、慣性センサ10、演算部14及び通信素子16を備える。慣性センサ10は、検出対象物の加速度又は角速度を検出対象物の慣性力として検出し、検出した慣性力をアナログ信号で出力し、該アナログ信号をデジタル信号に変換処理するものである。
【0016】
慣性センサ10は、複数の角速度センシング素子20#i(i=1,2,3)、複数の加速度センシング素子22#i(i=1,2,3)及び複数の信号処理素子26#i(i=1,2,3),28#i(i=1,2,3)を有する。角速度センシング素子20#i(i=1,2,3)は、検出対象物の角速度を検出し、角速度に応じたレベルのアナログ信号、例えば、電圧を出力する角速度検出素子である。加速度センシング素子22#i(i=1,2,3)は、検出対象物の加速度を検出し、加速度に応じたレベルのアナログ信号、例えば、電圧を出力する加速度検出素子である。
【0017】
例えば、慣性センサ2が車両に取り付けられる場合は、車両の重心付近に配置され、20#1は車両の上下軸まわりの角速度であるヨーレートを検出するヨーレートセンシング素子、20#2は車両の左右軸まわりの角速度であるピッチレートを検出するピッチレートセンシング素子、20#3は車両の前後軸まわりの角速度であるロールレートを検出するロールレートセンシング素子である。また、22#1は車両の上下軸方向の加速度を検出する上下加速度センシング素子、22#2は車両の左右軸方向の加速度を検出する左右加速度センシング素子、22#3は車両の前後軸方向の加速度を検出する前後加速度センシング素子である。
【0018】
角速度センシング素子20#i(i=1,2,3)及び加速度センシング素子22#i(i=1,2,3)のアナログ出力は、後述するようにデジタル信号に変換されて、デジタル信号に基づいて、コントロールユニット4により車両等が制御されるが、これらのセンシング素子20#i(i=1,2,3),22#i(i=1,2,3)の少なくとも一つについては、例えば、アナログ信号の全レンジ域の一部の第1のレンジ域について、変換後のデジタル信号において1ビット当たりのアナログ信号レベルが小さい高分解能のデジタル信号が要求される制御系、例えば、アダプティブクルーズ制御系等と、高分解能は要求されないが全レンジ域のデジタル信号が要求される制御系、例えば、横滑り制御系等がある。
【0019】
例えば、ヨーレートセンシング素子20#1より出力されるヨーレートについて、アダプティブクルーズコントロール等の常用制御系では、0°/secを中心として、正負同範囲の角速度について、例えば、−255°/sec〜255°/secのレンジ域について高分解能のデジタル信号が要求される。また、横滑り制御等の車両安定制御系では、高分解能は要求されず低分解能で良いが、全レンジ域、例えば、−2000°/sec〜2000°/secのデジタル信号が要求される。
【0020】
角速度センシング素子20#i(i=1,2,3)及び加速度センシング素子22#i(i=1,2,3)は、その出力側と信号線23#i,24#i(i=1,2,3)を介して信号処理素子26#i,28#i(i=1,2,3)に接続され、図示しない電源電圧、例えば、5Vの電源電圧が外部より供給され、図示しない抵抗等により、0Vから5Vまでの範囲を角速度や加速度の検出範囲全体に対応させ、角速度や加速度に該当する電圧を出力する。
【0021】
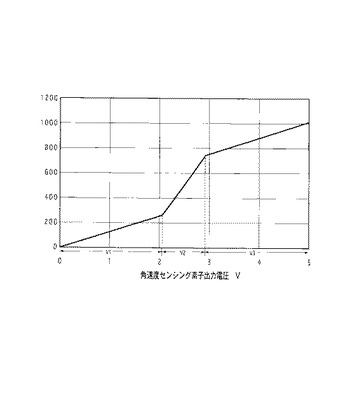
例えば、ヨーレートセンシング素子20#1は、図3に示すように、−2000°/sec〜+2000°/secの範囲の角速度を検出範囲とし、この検出範囲を0〜5Vに対応させ、ヨーレートに対してリニアな関係の電圧を出力する。ヨーレートが−255°/secから+255°/secのレンジ域R2は出力電圧の範囲が第1のレンジ域V2に対応し、ヨーレートが−2000°/sec〜−255°/secのレンジ域R1,255°/sec〜2000°/secのレンジ域R3は出力電圧の範囲が第2のレンジ域V1,V3に対応する。
【0022】
ヨーレートセンシング素子20#1は、例えば、水晶音叉型の振動子に角速度が作用したときに発生するコリオリ力を振動子の変位として検出して、角速度を検出する。尚、本実施形態では、高分解能と低分解能広域の少なくとも2種類の分解能が要求されるものの一例として、ヨーレートセンシング素子20#1について説明する。
【0023】
信号処理素子26#i,28#i(i=1,2,3)は、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)の出力側に信号線23#i,24#i(i=1,2,3)を介して接続され、信号線23#i,24#i(i=1,2,3)よりアナログ信号を入力し、所定の量子化ビット、例えば、12ビットのデジタル信号に変換する素子であり、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)とは別体のICチップで作製されるASIC(Application Specific Integrated Circuit)である。
【0024】
信号処理素子26#i,28#i(i=1,2,3)は、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)からのアナログ信号、例えば、電圧の全範囲0〜5Vを要求される高分解能のデジタル信号に変換するために、0°/sec,0m/sec2に対応する2.5V(零点)にデジタル値(初期値)を割り当て、電圧とデジタル値との関係がリニアな関係となるように所定ビット長のデジタル信号に変換する。
【0025】
角速度センシング素子20#1について、例えば、−255°/sec〜+255°/secに対応する第1のレンジ域V2のアナログ信号については、1°/secの高分解能が要求される。また、−2000°/sec〜−255°/sec及び+255°/sec〜+2000°/secに対応する第2のレンジ域V1,V3のアナログ信号については、10°/secの低分解能が要求される場合は、全レンジ域−2000°/sec〜+2000°/secについて、高分解能の1°/secの分解能でデジタル信号に変換する。即ち、12ビットのデジタル信号に変換する。
【0026】
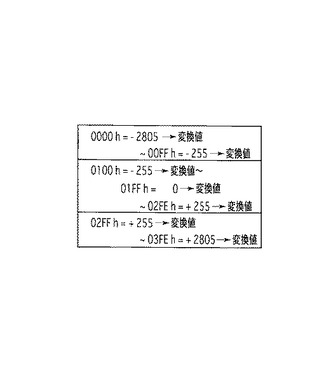
例えば、−2047°/secを0000h、0°/secを07FFh(初期値)、+2047°/secを0FFEhとし、−2047°/sec〜+2047°/secの角速度に対して、リニアに変化するようにデジタル値を割り当てる。
【0027】
尚、角速度センシング素子20#iの検出レンジ−2000°/sec〜+2000°/secよりもデジタル信号の対応する範囲が広いのは、12ビットのデジタル信号で表現できる角速度の範囲に対応したからである。また、以下の説明において−2000°/sec〜−255°/sec、−255°/sec〜+255°/sec、+255°/sec〜+2000°/secに対応する電圧域及びデジタル信号の範囲を第2のレンジ域V1、第1のレンジ域V2、第2のレンジ域V3と称することもある。
【0028】
演算部14は、マイクロコンピュータ(マイコン)を有する。マイコンは、図示しない、CPU、メインメモリ、シリアルライン11#i,12#i(i=1〜3)に接続されるシリアルインタフェース部を有する。シリアルライン11#i(i=1,2,3),12#i(i=1,2,3)に接続されるシリアルインタフェース部は、クロックに基づいて、信号処理素子26#i(i=1,2,3),28#i(i=1,2,3)より送出されたデジタル信号を受信して、メインメモリの該当領域に格納する。
【0029】
CPUは、以下の機能を有する。
【0030】
(1)メインメモリの該当領域に格納されたヨーレート、ピッチレート、ロールレート、上下加速度、左右加速度及び前後加速度のデジタル信号に対して、後述するように、高分解能及び低分解能のデジタル信号が要求されるヨーレート等については、信号処理素子26#1から出力されたデジタル信号が第1のレンジ域V2に属するとき、高分解能のデジタル信号に変換し、第2のレンジ域V1,V3に属するとき、低分解能の第2のデジタル信号に変換する。
【0031】
(2)慣性センサユニット2が静止、即ち、車両が静止している状態での角速度センシング素子20#1,20#2,20#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各角速度センシング素子2#1,20#2,20#3の出力値に対し、静止時の各レートセンサの出力値が中点(2.5Vに対応するデジタル値)となるように補正(中点補正)を行い、車両が直進(非旋回)状態かつ一定速(非加減速)状態が比較的長時間継続している安定状態での加速度センサ22#1,22#2,22#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各加速度センサ22#1,22#2,22#3の出力値が中点となるように同様の中点補正を行う。
【0032】
(3)ピッチレート、ロールレート、上下加速度、左右加速度及び前後加速度に基づいて、角速度センシング素子20#i(i=1,2,3),加速度センシング素子22#i(i=1,2,3)の故障判断を行う。
【0033】
(4)ヨーレート等の第2のデジタル信号及び上記故障判断結果をパケットに収容し、通信素子16を通して、図示しない、CAN6に接続された、横滑り制御システム、アダプティブクルーズ制御システム、ナビゲーションシステムや表示システム等のコントロールユニット4に送信する。
【0034】
通信素子16は、マイコン14のシリアルラインに接続され、マイコン14とCAN4間の双方向通信のためのインタフェースを司る。
【0035】
マイコン14に搭載されたプログラムが実行することにより図2中の変換部50がデジタル信号に変換する。図4,5はデジタル信号の変換を示す図である。図6はデジタル信号変換のフローチャートである。
【0036】
図4に示すように、角速度センシング素子20#1の出力電圧について、第1のレンジ域V2については、高分解能、例えば、1°/secの分解能が要求され、第2のレンジ域V1,V3については、低分解能、例えば、10°/secの分解能が要求される。第1のレンジ域V2は−255°/sec〜+255°/secに対応し、第2のレンジ域V1,V3は−2000°/sec〜−255°/secに対応し、+255°/sec〜+2000°/secに対応する。要求される分解能から必要とされる最小ビット長が算出される。図4中の傾きが分解能に対応する。
【0037】
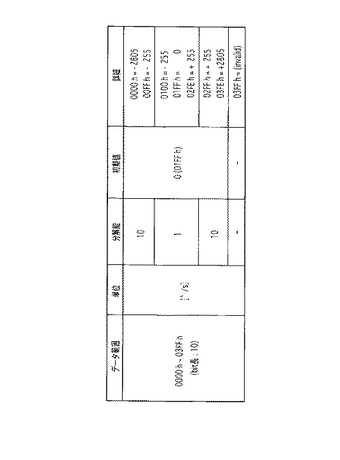
本例では、図5に示すように、上記分解能の要求を満たす最小ビット数は10ビットとなる。0°/secに10ビットで表現される値の中間値(01FFh)が初期値として割り当てられる。第1のレンジ域V2について、−255°/secに0100hが割り当てられ、+255°/secに2FEhが割り当てられる。そして、1°/sec増減するごとに、デジタル値が1増減される。これにより、−255°/sec〜+255°/secでは、1ビット当たり1°/sec、即ち、分解能が1となる。
【0038】
第2のレンジ域V1について、−2805°/secに000hが割り当てられ、−255°/secに00FFhが割り当てられ、第2のレンジ域V3について、+255°/secに2FFhが割り当てられ、+2805°/secに3FFhが割り当てられる。そして、10°/sec増減するごとに、デジタル値が1増減される。これにより、第1のレンジV1,V3では、1ビット当たり10°/sec、即ち、分解能が10となる。
【0039】
尚、−2805°/sec〜−2000°/sec及び+2000°/sec〜+2805°/secの範囲については、角速度センシング素子20#1の検出範囲−2000°/sec〜+2000°/secの範囲を超えているが、10ビットで表現可能な角速度に対応させて記載している。
【0040】
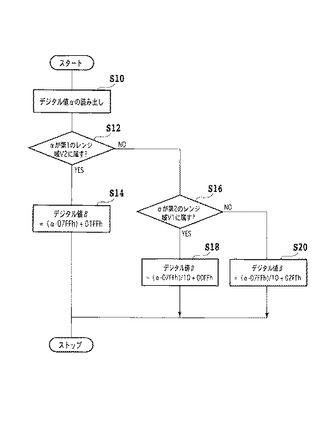
以下、図6を参照して、変換部50の処理を説明する。ステップS10で信号処理素子26#1により変換された12ビットのデジタル値αを読み出す。ステップS12でデジタル値αが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS14に進む。否定判定ならば、ステップS16に進む。
【0041】
ステップS14で10ビットのデジタル値βに(α−07FFh)+00FFhを代入する。ステップS16でデジタル値αが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS18に進む。否定判定ならば、ステップS20に進む。ステップS18でデジタル値βに(α−07FF)/10+00FFhを代入する。ステップS20でデジタル値βに(α−07FF)/10+02FFhを代入する。
【0042】
以降、(2),(3),(4)が10ビットのデジタル値βに基づいて処理がされることから、マイコン14が処理するデジタル信号のビット長が10ビットと短くなる。また、10ビットのデジタル信号が通信素子16よりCAN6に送信されることから、ヨーレートセンサ等のデジタル信号の通信に必要となる容量を低減できる。
【0043】
コントロールユニット4は、それぞれCPUを備えた複数のシステムから構成される。例えば、横滑り制御を行うコントロールユニット4は、車両のオーバステア状態、アンダーステア状態等の挙動を、操舵角や車速から定まる目標値と、CAN6より受信したヨーレートのデジタル信号を後述するようにデジタル信号(制御値)に変換し、変換されたヨーレート、横加速度等の検出値との比較により判定し、その判定結果に基づいてオーバステアやアンダーステアを打ち消し、検出値が目標値に近づくように、旋回外側の車輪にブレーキをかけたり、旋回内側の車輪にブレーキをかけたりする制御を行う。
【0044】
アダプティブクルーズ制御を行うコントロールユニット4は、CAN6より受信したヨーレートのデジタル信号を後述するようにデジタル信号(制御値)に変換し、変換されたヨーレート等から、オートクルーズの一定車速制御に加えて、車間距離が安全車間距離以下になると、シフトダウンや自動ブレーキ制御を行う。表示システムはナビゲーションシステムからの情報等を液晶表示装置上に表示する。
【0045】
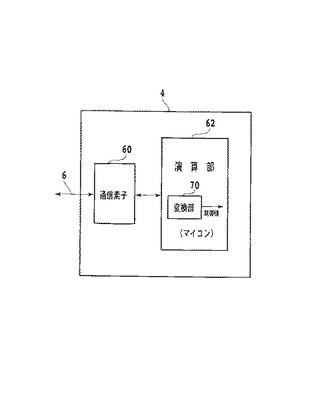
図7は図1中のコントロールユニット4の機能ブロック図である。コントロールユニット4は通信素子60及び演算部62を有する。通信素子60は、演算部62とシリアルラインに接続され、演算部14と演算部62間のCAN6を通して双方向通信を行う。演算部62は、マイクロコンピュータ(マイコン)を有する。マイコンは、図示しない、CPU、メインメモリ、通信素子60との間をインタフェースするシリアルインタフェース部等を有する。シリアルインタフェース部は、クロックに基づいて、通信素子60からのデジタル信号を受信して、メインメモリの該当領域に格納する。
【0046】
CPUは、以下の機能を有する。(1)メインメモリの該当領域に格納されたヨーレート等のデジタル信号を後述するように第3のデジタル信号(制御値)に変換する。(2)変換されたヨーレート、ピッチレート等に基づいて、横滑り制御システムでは、オーバステアやアンダーステアを打ち消し、検出値が目標値に近づくように、旋回外側の車輪にブレーキをかけたり、旋回内側の車輪にブレーキをかけたりする制御を行い、アダプティブクルーズ制御では、オートクルーズの一定車速制御に加えて、車間距離が安全車間距離以下になると、シフトダウンや自動ブレーキ制御等を行う。
【0047】
マイコン62に搭載されたプログラムの実行により図7中の変換部70がデジタル信号(制御値)に変換する。図8はデジタル信号の変換を示す図である。図9,10はデジタル信号変換の一例を示すフローチャートである。変換部70は、図8に示すように、デジタル信号が示すデジタル値βが分解能の第1のレンジ域V2及び低分解能のレンジ域V1,V3のいずれの分解能であるかを判別し、要求される分解能に従って、デジタル値βをデジタル値γに変換する。
【0048】
(1) 高分解能が要求される場合
第1のレンジ域V2について、高分解能が要求されるアダプティブクルーズコントロール等の常用制御系では、要求される第1のレンジ域V2のデジタル信号については、そのデジタル信号のデジタル値をそのまま第2のデジタル信号のデジタル値とする。第2のレンジ域V1のデジタル信号については、第1のレンジ域V2のデジタル信号の最小値とする。第2のレンジ域V3に属するデジタル信号については、第1のレンジ域V2のデジタル信号の最大値とする。これにより、第1のレンジ域V2について、変換後のデジタル信号の分解能は要求される分解能1°/secとなる。
【0049】
図9中のステップS50でマイコン14により変換されたデジタル値βを読み出す。ステップS12でデジタル値βが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS54に進む。否定判定ならば、ステップS56に進む。ステップS54でデジタル値γにデジタル値βを代入する。
【0050】
ステップS56でデジタル値βが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS58に進む。否定判定ならば、ステップS60に進む。ステップS58でデジタル値γに0100hを代入する。ステップS60でデジタル値γに02FEhを代入する。
【0051】
(2) 低分解能広域が要求される場合
全レンジ域が要求される横滑り制御システムでは、変換後の第3のデジタル信号の分解能が全レンジ域について、同一、例えば、低分解能のデジタル信号に変換される。変換後の分解能から、変換後のビット長及び角速度0°/secに対応する変換後のデジタル値(初期値)を決定する。
【0052】
第1のレンジ域V2に属する変換前のデジタル値0100h〜02FFh及び第2のレンジ域V1,V3に属する変換前のデジタル値0000h〜00FFh、02FFh〜03FEhの分解能から、変換後の分解能に従って、全域について、角速度に対してリニアに変化するようにデジタル信号に変換する。
【0053】
例えば、変換後の分解能を10、変換後の初期値を01FFhとすると、0°/secから10°/secが増減される毎に、初期値01FFhから1増減する。即ち、第1のレンジ域V2に対応するデジタル値0100h〜012FEhについては、分解能が1であることから、変換前の10個のデジタル値毎に、変換後のデジタル値が1増減される。
【0054】
第2のレンジ域V2,V3に対応するデジタル値0000h〜00FFh、02FFh〜03FEhについては、00FFh=−255°/secに第1のレンジ域V2の最小値0100hが割り当てられ、02FFh=255°/secに第1のレンジ域V1のデジタル値の最大値02FEhが割り当てられ、変換前の1個のデジタル値毎に、変換後のデジタル値が1増減される。
【0055】
図10中のステップS80でマイコン14により変換されたデジタル値βを読み出す。ステップS82でデジタル値βが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS84に進む。否定判定ならば、ステップS86に進む。ステップS84でデジタル値γに(β−01FFh)/10+01FFhを代入する。ステップS86でデジタル値βが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS88に進む。否定判定ならば、ステップS90に進む。
【0056】
ステップS88でデジタル値γに(β−00FFh)+0100hを代入する。ステップS90でデジタル値γに(β−02Ffh)+02FEhを代入する。これにより、全域V1,V2,V3について、変換後のデジタル信号の分解能は要求される分解能10°/secとなる。
【0057】
本実施形態では、高分解能及び低分解能広域のデジタル信号への変換をマイコン14によりソフトウェアにより変換したが、信号処理素子によりハードウェアにより変換しても良い。尚、ソフトウェアによりデジタル信号に変換することにより、容易に実現することができる。
【0058】
以上説明したように、本実施形態によれば、制御上重要なレンジを高分解能に、そうでないレンジは低分解能に設定し通信を行うので、必要なビット長を短くすることができ、通信データ量が低減し、CAN6の負荷を軽減できる。また、長ビットのデータを扱う必要がなくなり、慣性センサユニットのマイコンのコストダウンや小型化を実現できる。
【0059】
また、コントロールユニットも要求される分解能のデジタルデータに変換するので、ビット長を短くすることができ、コントロールユニットのマイコンのコストダウン及び小型化を実現できる。更に、本発明は、慣性センサユニットとコントロールユニット間の通信に限らず、分解能をレンジ毎に設定して、デジタル信号に変換して通信を行うユニットに適用できる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施形態による送受信ユニットの構成図である。
【図2】図1中の慣性センサユニットの一例を示す図である。
【図3】角速度と角速度センシング素子出力電圧との関係を示す図である。
【図4】慣性センサユニットでのデジタル変換を示す図である。
【図5】慣性センサユニットでのデジタル変換を示す図である。
【図6】慣性センサユニットでのデジタル変換を示すフローチャートである。
【図7】図1中のコントロールユニットの一例を示す図である。
【図8】コントロールユニットでのデジタル変換を示す図である。
【図9】コントロールユニットでのデジタル変換を示すフローチャートである。
【図10】コントロールユニットでのデジタル変換を示すフローチャートである。
【符号の説明】
【0061】
2 慣性センサユニット
4 コントロールユニット
6 CAN
10 慣性センサ
20#1,20#2,20#3 角速度センシング素子
26#1,26#2,26#3 信号処理素子
28#1,28#2,28#3 信号処理素子
14 演算部
16 通信素子
50 変換部
60 通信素子
62 演算部
70 変換部
【技術分野】
【0001】
本発明は、送信側ユニットと受信側ユニットとを有する通信システムに関し、例えば、車両等に搭載される慣性センサユニット及びコントロールユニット間の通信システムに関する。
【背景技術】
【0002】
車両や飛行体等の位置や姿勢の観測のために、角速度及び加速度等の測定が行われ、そのために、角速度センサや加速度センサ等を有する慣性センサが用いられている。慣性センサにより角速度センサや加速度センサ等からのアナログ信号がデジタル信号に変換されてから、CPUにより車両や飛行体等の位置、姿勢及び速度制御が行われる。
【0003】
位置、姿勢及び速度制御では、各制御内容に応じた分解能が必要とされる。例えば、車両制御としては、横滑り制御等の車両安定制御においては、低分解能広域の角速度等が必要とされ、アダプティプクルーズコントロール等の常用制御においては、高分解能狭域の角速度等が必要とされる。
【0004】
先行技術文献としては、以下の特許文献1がある。特許文献1には、ヨーレートセンサの測定結果の妥当性をチェックするべく、測定範囲全体を検出範囲とするヨーレートセンサと1個又は複数の一部の測定範囲を検出範囲とするヨーレートセンサを設け、これらのヨーレートセンサの測定結果及び測定量の相関関係などから測定結果の妥当性をチェックすることが記載されている。
【特許文献1】特表平11−509155号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、異なる分解能のセンサ及びセンサのアナログ信号出力をデジタル信号に変換する信号処理素子を複数個設け、各デジタル信号を別々のシリアルラインでマイクロコンピュータの入力ポートに入力する場合には、センサ及び信号処理素子を含む慣性センサのコストがかかり、慣性センサ及びマイクロコンピュータを含む慣性センサユニットのサイズが大きくなるという問題点がある。また、特許文献1では異なる分解能の慣性センサを複数個設け、その出力をマイクロコンピュータの別々のポートに入力して処理していたために、同様の問題点がある。
【0006】
また、アナログ信号レベルの全域を高分解能のデジタル信号に変換する場合は、処理するデジタル信号のビット数が多くなること、及び慣性センサユニットからコントロールユニットにネットワークを通してそのデジタル信号を通信する際のデータ量が多くなり通信量が増大することから、慣性センサユニットやコントロールユニットが備えるマイクロコンピュータに高性能なものが要求され、コストもサイズも大きくなるという問題があった。
【0007】
本発明は、上記問題点に鑑みてなされたものであり、分解能をレンジ毎に設定して、デジタル信号に変換することにより、小型化、低コスト化が実現できる通信システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1記載の発明によれば、送信側ユニット及び受信側ユニットを有する通信システムであって、前記送信側ユニットは、被変換信号を、該被変換信号レベルの全レンジ域中の第1のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルである第1の分解能の第1のデジタル信号に変換し、前記全レンジ域中の第2のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルであって前記第1の分解能とは異なる第2の分解能の第1のデジタル信号に変換する第1の変換手段と、前記第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備し、前記受信側ユニットは、前記第1のデジタル信号を受信する第2の通信手段と、前記第2の通信手段が受信した前記第1のデジタル信号が前記第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、前記第1及び第2の分解能に基づいて、前記第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備したことを特徴とする通信システムが提供される。
【0009】
請求項2記載の発明によれば、請求項1記載の発明において、前記送信側ユニットは、検出対象物の角速度又は加速度を前記検出対象物の慣性力として検出し、該検出した慣性力をアナログ信号で出力する検出素子部及び前記検出素子部の出力をデジタル信号に変換する信号処理素子部を有し、検出対象物に取付けられ、慣性力に応じたデジタル信号を出力する慣性センサと前記デジタル信号を処理する演算部とを備えた慣性センサユニットであり、前記受信側ユニットは、前記第2のデジタル信号に基づいて前記検出対象物を制御するコントロールユニットであることを特徴とする通信システムが提供される。
【0010】
請求項3記載の発明によれば、請求項2記載の発明において、前記第1のレンジ域は、前記検出素子部が検出する前記角速度又は前記加速度の零を中心に正負均等な範囲に対応することを特徴とする通信システムが提供される。
【発明の効果】
【0011】
請求項1記載の発明によれば、第1のレンジ域の被変換信号については、第1の分解能、例えば、高分解能な第1のデジタル信号に変換し、第2のレンジ域の被変換信号については、第2の分解能、例えば、低分解能な第1のデジタル信号に変換するので、レンジ巾を守ったままデジタル信号のビット長を短くすることができ、受信側ユニットへ送信するデータ量を少なくすることができる。更に、処理する第1のデジタル信号のビット長を短くできるので、送信側ユニット及び受信側ユニットのコストを低減することができる。
【0012】
請求項2記載の発明によれば、処理する第1のデジタル信号のビット数が短くなり、慣性センサユニット及びコントロールユニット間の通信量を低減することができ、慣性センサユニット及びコントロールユニットのコスト及びサイズを小さくすることができる。
【0013】
請求項3記載の発明によれば、第1のレンジ域は、検出素子部が検出する角速度又は加速度の零を中心に正負均等な範囲に対応するので、角速度が零を中心に正負均等な範囲に高分解能が要求されるアダプティブコントロール等の要求を満たすことができ、車両等に搭載される慣性センサユニット並びにコントロールユニットのコスト及びサイズを低減することができる。
【発明を実施するための最良の形態】
【0014】
図1は本発明の実施形態による通信システムの一例を示す構成図である。図1に示すように、通信システムは、送信ユニットとしての慣性センサユニット2、コントロールユニット4、並びに慣性センサユニット2及びコントロールユニット4間の双方向通信を行うためのCAN6(Controller Area Network)を有する。
【0015】
図2は図1中の慣性センサユニットの構成図である。慣性センサユニット2は、車両や飛行機等の検出対象物に取り付けられる。図2に示すように、慣性センサユニット2は、ハウジング内に収容された、慣性センサ10、演算部14及び通信素子16を備える。慣性センサ10は、検出対象物の加速度又は角速度を検出対象物の慣性力として検出し、検出した慣性力をアナログ信号で出力し、該アナログ信号をデジタル信号に変換処理するものである。
【0016】
慣性センサ10は、複数の角速度センシング素子20#i(i=1,2,3)、複数の加速度センシング素子22#i(i=1,2,3)及び複数の信号処理素子26#i(i=1,2,3),28#i(i=1,2,3)を有する。角速度センシング素子20#i(i=1,2,3)は、検出対象物の角速度を検出し、角速度に応じたレベルのアナログ信号、例えば、電圧を出力する角速度検出素子である。加速度センシング素子22#i(i=1,2,3)は、検出対象物の加速度を検出し、加速度に応じたレベルのアナログ信号、例えば、電圧を出力する加速度検出素子である。
【0017】
例えば、慣性センサ2が車両に取り付けられる場合は、車両の重心付近に配置され、20#1は車両の上下軸まわりの角速度であるヨーレートを検出するヨーレートセンシング素子、20#2は車両の左右軸まわりの角速度であるピッチレートを検出するピッチレートセンシング素子、20#3は車両の前後軸まわりの角速度であるロールレートを検出するロールレートセンシング素子である。また、22#1は車両の上下軸方向の加速度を検出する上下加速度センシング素子、22#2は車両の左右軸方向の加速度を検出する左右加速度センシング素子、22#3は車両の前後軸方向の加速度を検出する前後加速度センシング素子である。
【0018】
角速度センシング素子20#i(i=1,2,3)及び加速度センシング素子22#i(i=1,2,3)のアナログ出力は、後述するようにデジタル信号に変換されて、デジタル信号に基づいて、コントロールユニット4により車両等が制御されるが、これらのセンシング素子20#i(i=1,2,3),22#i(i=1,2,3)の少なくとも一つについては、例えば、アナログ信号の全レンジ域の一部の第1のレンジ域について、変換後のデジタル信号において1ビット当たりのアナログ信号レベルが小さい高分解能のデジタル信号が要求される制御系、例えば、アダプティブクルーズ制御系等と、高分解能は要求されないが全レンジ域のデジタル信号が要求される制御系、例えば、横滑り制御系等がある。
【0019】
例えば、ヨーレートセンシング素子20#1より出力されるヨーレートについて、アダプティブクルーズコントロール等の常用制御系では、0°/secを中心として、正負同範囲の角速度について、例えば、−255°/sec〜255°/secのレンジ域について高分解能のデジタル信号が要求される。また、横滑り制御等の車両安定制御系では、高分解能は要求されず低分解能で良いが、全レンジ域、例えば、−2000°/sec〜2000°/secのデジタル信号が要求される。
【0020】
角速度センシング素子20#i(i=1,2,3)及び加速度センシング素子22#i(i=1,2,3)は、その出力側と信号線23#i,24#i(i=1,2,3)を介して信号処理素子26#i,28#i(i=1,2,3)に接続され、図示しない電源電圧、例えば、5Vの電源電圧が外部より供給され、図示しない抵抗等により、0Vから5Vまでの範囲を角速度や加速度の検出範囲全体に対応させ、角速度や加速度に該当する電圧を出力する。
【0021】
例えば、ヨーレートセンシング素子20#1は、図3に示すように、−2000°/sec〜+2000°/secの範囲の角速度を検出範囲とし、この検出範囲を0〜5Vに対応させ、ヨーレートに対してリニアな関係の電圧を出力する。ヨーレートが−255°/secから+255°/secのレンジ域R2は出力電圧の範囲が第1のレンジ域V2に対応し、ヨーレートが−2000°/sec〜−255°/secのレンジ域R1,255°/sec〜2000°/secのレンジ域R3は出力電圧の範囲が第2のレンジ域V1,V3に対応する。
【0022】
ヨーレートセンシング素子20#1は、例えば、水晶音叉型の振動子に角速度が作用したときに発生するコリオリ力を振動子の変位として検出して、角速度を検出する。尚、本実施形態では、高分解能と低分解能広域の少なくとも2種類の分解能が要求されるものの一例として、ヨーレートセンシング素子20#1について説明する。
【0023】
信号処理素子26#i,28#i(i=1,2,3)は、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)の出力側に信号線23#i,24#i(i=1,2,3)を介して接続され、信号線23#i,24#i(i=1,2,3)よりアナログ信号を入力し、所定の量子化ビット、例えば、12ビットのデジタル信号に変換する素子であり、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)とは別体のICチップで作製されるASIC(Application Specific Integrated Circuit)である。
【0024】
信号処理素子26#i,28#i(i=1,2,3)は、角速度センシング素子20#i,加速度センシング素子22#i(i=1,2,3)からのアナログ信号、例えば、電圧の全範囲0〜5Vを要求される高分解能のデジタル信号に変換するために、0°/sec,0m/sec2に対応する2.5V(零点)にデジタル値(初期値)を割り当て、電圧とデジタル値との関係がリニアな関係となるように所定ビット長のデジタル信号に変換する。
【0025】
角速度センシング素子20#1について、例えば、−255°/sec〜+255°/secに対応する第1のレンジ域V2のアナログ信号については、1°/secの高分解能が要求される。また、−2000°/sec〜−255°/sec及び+255°/sec〜+2000°/secに対応する第2のレンジ域V1,V3のアナログ信号については、10°/secの低分解能が要求される場合は、全レンジ域−2000°/sec〜+2000°/secについて、高分解能の1°/secの分解能でデジタル信号に変換する。即ち、12ビットのデジタル信号に変換する。
【0026】
例えば、−2047°/secを0000h、0°/secを07FFh(初期値)、+2047°/secを0FFEhとし、−2047°/sec〜+2047°/secの角速度に対して、リニアに変化するようにデジタル値を割り当てる。
【0027】
尚、角速度センシング素子20#iの検出レンジ−2000°/sec〜+2000°/secよりもデジタル信号の対応する範囲が広いのは、12ビットのデジタル信号で表現できる角速度の範囲に対応したからである。また、以下の説明において−2000°/sec〜−255°/sec、−255°/sec〜+255°/sec、+255°/sec〜+2000°/secに対応する電圧域及びデジタル信号の範囲を第2のレンジ域V1、第1のレンジ域V2、第2のレンジ域V3と称することもある。
【0028】
演算部14は、マイクロコンピュータ(マイコン)を有する。マイコンは、図示しない、CPU、メインメモリ、シリアルライン11#i,12#i(i=1〜3)に接続されるシリアルインタフェース部を有する。シリアルライン11#i(i=1,2,3),12#i(i=1,2,3)に接続されるシリアルインタフェース部は、クロックに基づいて、信号処理素子26#i(i=1,2,3),28#i(i=1,2,3)より送出されたデジタル信号を受信して、メインメモリの該当領域に格納する。
【0029】
CPUは、以下の機能を有する。
【0030】
(1)メインメモリの該当領域に格納されたヨーレート、ピッチレート、ロールレート、上下加速度、左右加速度及び前後加速度のデジタル信号に対して、後述するように、高分解能及び低分解能のデジタル信号が要求されるヨーレート等については、信号処理素子26#1から出力されたデジタル信号が第1のレンジ域V2に属するとき、高分解能のデジタル信号に変換し、第2のレンジ域V1,V3に属するとき、低分解能の第2のデジタル信号に変換する。
【0031】
(2)慣性センサユニット2が静止、即ち、車両が静止している状態での角速度センシング素子20#1,20#2,20#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各角速度センシング素子2#1,20#2,20#3の出力値に対し、静止時の各レートセンサの出力値が中点(2.5Vに対応するデジタル値)となるように補正(中点補正)を行い、車両が直進(非旋回)状態かつ一定速(非加減速)状態が比較的長時間継続している安定状態での加速度センサ22#1,22#2,22#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各加速度センサ22#1,22#2,22#3の出力値が中点となるように同様の中点補正を行う。
【0032】
(3)ピッチレート、ロールレート、上下加速度、左右加速度及び前後加速度に基づいて、角速度センシング素子20#i(i=1,2,3),加速度センシング素子22#i(i=1,2,3)の故障判断を行う。
【0033】
(4)ヨーレート等の第2のデジタル信号及び上記故障判断結果をパケットに収容し、通信素子16を通して、図示しない、CAN6に接続された、横滑り制御システム、アダプティブクルーズ制御システム、ナビゲーションシステムや表示システム等のコントロールユニット4に送信する。
【0034】
通信素子16は、マイコン14のシリアルラインに接続され、マイコン14とCAN4間の双方向通信のためのインタフェースを司る。
【0035】
マイコン14に搭載されたプログラムが実行することにより図2中の変換部50がデジタル信号に変換する。図4,5はデジタル信号の変換を示す図である。図6はデジタル信号変換のフローチャートである。
【0036】
図4に示すように、角速度センシング素子20#1の出力電圧について、第1のレンジ域V2については、高分解能、例えば、1°/secの分解能が要求され、第2のレンジ域V1,V3については、低分解能、例えば、10°/secの分解能が要求される。第1のレンジ域V2は−255°/sec〜+255°/secに対応し、第2のレンジ域V1,V3は−2000°/sec〜−255°/secに対応し、+255°/sec〜+2000°/secに対応する。要求される分解能から必要とされる最小ビット長が算出される。図4中の傾きが分解能に対応する。
【0037】
本例では、図5に示すように、上記分解能の要求を満たす最小ビット数は10ビットとなる。0°/secに10ビットで表現される値の中間値(01FFh)が初期値として割り当てられる。第1のレンジ域V2について、−255°/secに0100hが割り当てられ、+255°/secに2FEhが割り当てられる。そして、1°/sec増減するごとに、デジタル値が1増減される。これにより、−255°/sec〜+255°/secでは、1ビット当たり1°/sec、即ち、分解能が1となる。
【0038】
第2のレンジ域V1について、−2805°/secに000hが割り当てられ、−255°/secに00FFhが割り当てられ、第2のレンジ域V3について、+255°/secに2FFhが割り当てられ、+2805°/secに3FFhが割り当てられる。そして、10°/sec増減するごとに、デジタル値が1増減される。これにより、第1のレンジV1,V3では、1ビット当たり10°/sec、即ち、分解能が10となる。
【0039】
尚、−2805°/sec〜−2000°/sec及び+2000°/sec〜+2805°/secの範囲については、角速度センシング素子20#1の検出範囲−2000°/sec〜+2000°/secの範囲を超えているが、10ビットで表現可能な角速度に対応させて記載している。
【0040】
以下、図6を参照して、変換部50の処理を説明する。ステップS10で信号処理素子26#1により変換された12ビットのデジタル値αを読み出す。ステップS12でデジタル値αが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS14に進む。否定判定ならば、ステップS16に進む。
【0041】
ステップS14で10ビットのデジタル値βに(α−07FFh)+00FFhを代入する。ステップS16でデジタル値αが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS18に進む。否定判定ならば、ステップS20に進む。ステップS18でデジタル値βに(α−07FF)/10+00FFhを代入する。ステップS20でデジタル値βに(α−07FF)/10+02FFhを代入する。
【0042】
以降、(2),(3),(4)が10ビットのデジタル値βに基づいて処理がされることから、マイコン14が処理するデジタル信号のビット長が10ビットと短くなる。また、10ビットのデジタル信号が通信素子16よりCAN6に送信されることから、ヨーレートセンサ等のデジタル信号の通信に必要となる容量を低減できる。
【0043】
コントロールユニット4は、それぞれCPUを備えた複数のシステムから構成される。例えば、横滑り制御を行うコントロールユニット4は、車両のオーバステア状態、アンダーステア状態等の挙動を、操舵角や車速から定まる目標値と、CAN6より受信したヨーレートのデジタル信号を後述するようにデジタル信号(制御値)に変換し、変換されたヨーレート、横加速度等の検出値との比較により判定し、その判定結果に基づいてオーバステアやアンダーステアを打ち消し、検出値が目標値に近づくように、旋回外側の車輪にブレーキをかけたり、旋回内側の車輪にブレーキをかけたりする制御を行う。
【0044】
アダプティブクルーズ制御を行うコントロールユニット4は、CAN6より受信したヨーレートのデジタル信号を後述するようにデジタル信号(制御値)に変換し、変換されたヨーレート等から、オートクルーズの一定車速制御に加えて、車間距離が安全車間距離以下になると、シフトダウンや自動ブレーキ制御を行う。表示システムはナビゲーションシステムからの情報等を液晶表示装置上に表示する。
【0045】
図7は図1中のコントロールユニット4の機能ブロック図である。コントロールユニット4は通信素子60及び演算部62を有する。通信素子60は、演算部62とシリアルラインに接続され、演算部14と演算部62間のCAN6を通して双方向通信を行う。演算部62は、マイクロコンピュータ(マイコン)を有する。マイコンは、図示しない、CPU、メインメモリ、通信素子60との間をインタフェースするシリアルインタフェース部等を有する。シリアルインタフェース部は、クロックに基づいて、通信素子60からのデジタル信号を受信して、メインメモリの該当領域に格納する。
【0046】
CPUは、以下の機能を有する。(1)メインメモリの該当領域に格納されたヨーレート等のデジタル信号を後述するように第3のデジタル信号(制御値)に変換する。(2)変換されたヨーレート、ピッチレート等に基づいて、横滑り制御システムでは、オーバステアやアンダーステアを打ち消し、検出値が目標値に近づくように、旋回外側の車輪にブレーキをかけたり、旋回内側の車輪にブレーキをかけたりする制御を行い、アダプティブクルーズ制御では、オートクルーズの一定車速制御に加えて、車間距離が安全車間距離以下になると、シフトダウンや自動ブレーキ制御等を行う。
【0047】
マイコン62に搭載されたプログラムの実行により図7中の変換部70がデジタル信号(制御値)に変換する。図8はデジタル信号の変換を示す図である。図9,10はデジタル信号変換の一例を示すフローチャートである。変換部70は、図8に示すように、デジタル信号が示すデジタル値βが分解能の第1のレンジ域V2及び低分解能のレンジ域V1,V3のいずれの分解能であるかを判別し、要求される分解能に従って、デジタル値βをデジタル値γに変換する。
【0048】
(1) 高分解能が要求される場合
第1のレンジ域V2について、高分解能が要求されるアダプティブクルーズコントロール等の常用制御系では、要求される第1のレンジ域V2のデジタル信号については、そのデジタル信号のデジタル値をそのまま第2のデジタル信号のデジタル値とする。第2のレンジ域V1のデジタル信号については、第1のレンジ域V2のデジタル信号の最小値とする。第2のレンジ域V3に属するデジタル信号については、第1のレンジ域V2のデジタル信号の最大値とする。これにより、第1のレンジ域V2について、変換後のデジタル信号の分解能は要求される分解能1°/secとなる。
【0049】
図9中のステップS50でマイコン14により変換されたデジタル値βを読み出す。ステップS12でデジタル値βが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS54に進む。否定判定ならば、ステップS56に進む。ステップS54でデジタル値γにデジタル値βを代入する。
【0050】
ステップS56でデジタル値βが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS58に進む。否定判定ならば、ステップS60に進む。ステップS58でデジタル値γに0100hを代入する。ステップS60でデジタル値γに02FEhを代入する。
【0051】
(2) 低分解能広域が要求される場合
全レンジ域が要求される横滑り制御システムでは、変換後の第3のデジタル信号の分解能が全レンジ域について、同一、例えば、低分解能のデジタル信号に変換される。変換後の分解能から、変換後のビット長及び角速度0°/secに対応する変換後のデジタル値(初期値)を決定する。
【0052】
第1のレンジ域V2に属する変換前のデジタル値0100h〜02FFh及び第2のレンジ域V1,V3に属する変換前のデジタル値0000h〜00FFh、02FFh〜03FEhの分解能から、変換後の分解能に従って、全域について、角速度に対してリニアに変化するようにデジタル信号に変換する。
【0053】
例えば、変換後の分解能を10、変換後の初期値を01FFhとすると、0°/secから10°/secが増減される毎に、初期値01FFhから1増減する。即ち、第1のレンジ域V2に対応するデジタル値0100h〜012FEhについては、分解能が1であることから、変換前の10個のデジタル値毎に、変換後のデジタル値が1増減される。
【0054】
第2のレンジ域V2,V3に対応するデジタル値0000h〜00FFh、02FFh〜03FEhについては、00FFh=−255°/secに第1のレンジ域V2の最小値0100hが割り当てられ、02FFh=255°/secに第1のレンジ域V1のデジタル値の最大値02FEhが割り当てられ、変換前の1個のデジタル値毎に、変換後のデジタル値が1増減される。
【0055】
図10中のステップS80でマイコン14により変換されたデジタル値βを読み出す。ステップS82でデジタル値βが第1のレンジ域V2に属するか否かを判定する。肯定判定ならば、ステップS84に進む。否定判定ならば、ステップS86に進む。ステップS84でデジタル値γに(β−01FFh)/10+01FFhを代入する。ステップS86でデジタル値βが第2のレンジ域V1に属するか否かを判定する。肯定判定ならば、ステップS88に進む。否定判定ならば、ステップS90に進む。
【0056】
ステップS88でデジタル値γに(β−00FFh)+0100hを代入する。ステップS90でデジタル値γに(β−02Ffh)+02FEhを代入する。これにより、全域V1,V2,V3について、変換後のデジタル信号の分解能は要求される分解能10°/secとなる。
【0057】
本実施形態では、高分解能及び低分解能広域のデジタル信号への変換をマイコン14によりソフトウェアにより変換したが、信号処理素子によりハードウェアにより変換しても良い。尚、ソフトウェアによりデジタル信号に変換することにより、容易に実現することができる。
【0058】
以上説明したように、本実施形態によれば、制御上重要なレンジを高分解能に、そうでないレンジは低分解能に設定し通信を行うので、必要なビット長を短くすることができ、通信データ量が低減し、CAN6の負荷を軽減できる。また、長ビットのデータを扱う必要がなくなり、慣性センサユニットのマイコンのコストダウンや小型化を実現できる。
【0059】
また、コントロールユニットも要求される分解能のデジタルデータに変換するので、ビット長を短くすることができ、コントロールユニットのマイコンのコストダウン及び小型化を実現できる。更に、本発明は、慣性センサユニットとコントロールユニット間の通信に限らず、分解能をレンジ毎に設定して、デジタル信号に変換して通信を行うユニットに適用できる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施形態による送受信ユニットの構成図である。
【図2】図1中の慣性センサユニットの一例を示す図である。
【図3】角速度と角速度センシング素子出力電圧との関係を示す図である。
【図4】慣性センサユニットでのデジタル変換を示す図である。
【図5】慣性センサユニットでのデジタル変換を示す図である。
【図6】慣性センサユニットでのデジタル変換を示すフローチャートである。
【図7】図1中のコントロールユニットの一例を示す図である。
【図8】コントロールユニットでのデジタル変換を示す図である。
【図9】コントロールユニットでのデジタル変換を示すフローチャートである。
【図10】コントロールユニットでのデジタル変換を示すフローチャートである。
【符号の説明】
【0061】
2 慣性センサユニット
4 コントロールユニット
6 CAN
10 慣性センサ
20#1,20#2,20#3 角速度センシング素子
26#1,26#2,26#3 信号処理素子
28#1,28#2,28#3 信号処理素子
14 演算部
16 通信素子
50 変換部
60 通信素子
62 演算部
70 変換部
【特許請求の範囲】
【請求項1】
送信側ユニット及び受信側ユニットを有する通信システムであって、
前記送信側ユニットは、被変換信号を、該被変換信号レベルの全レンジ域中の第1のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルである第1の分解能の第1のデジタル信号に変換し、前記全レンジ域中の第2のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルであって前記第1の分解能とは異なる第2の分解能の第1のデジタル信号に変換する第1の変換手段と、前記第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備し、
前記受信側ユニットは、前記第1のデジタル信号を受信する第2の通信手段と、前記第2の通信手段が受信した前記第1のデジタル信号が前記第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、前記第1及び第2の分解能に基づいて、前記第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備したことを特徴とする通信システム。
【請求項2】
前記送信側ユニットは、検出対象物の角速度又は加速度を前記検出対象物の慣性力として検出し、該検出した慣性力をアナログ信号で出力する検出素子部及び前記検出素子部の出力をデジタル信号に変換する信号処理素子部を有し、検出対象物に取付けられ、慣性力に応じたデジタル信号を出力する慣性センサと前記デジタル信号を処理する演算部とを備えた慣性センサユニットであり、前記受信側ユニットは、前記第2のデジタル信号に基づいて前記検出対象物を制御するコントロールユニットであることを特徴とする請求項1記載の通信システム。
【請求項3】
前記第1のレンジ域は、前記検出素子部が検出する前記角速度又は前記加速度の零を中心に正負均等な範囲に対応することを特徴とする請求項2記載の通信システム。
【請求項1】
送信側ユニット及び受信側ユニットを有する通信システムであって、
前記送信側ユニットは、被変換信号を、該被変換信号レベルの全レンジ域中の第1のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルである第1の分解能の第1のデジタル信号に変換し、前記全レンジ域中の第2のレンジ域の被変換信号については、1ビット当たりの前記被変換信号レベルであって前記第1の分解能とは異なる第2の分解能の第1のデジタル信号に変換する第1の変換手段と、前記第1のデジタル信号を受信側ユニットに送信する第1の通信手段とを具備し、
前記受信側ユニットは、前記第1のデジタル信号を受信する第2の通信手段と、前記第2の通信手段が受信した前記第1のデジタル信号が前記第1及び第2のレンジ域のいずれのレンジ域に対応するかを判断し、前記第1及び第2の分解能に基づいて、前記第1のデジタル信号を第2のデジタル信号に変換する第2の変換手段とを具備したことを特徴とする通信システム。
【請求項2】
前記送信側ユニットは、検出対象物の角速度又は加速度を前記検出対象物の慣性力として検出し、該検出した慣性力をアナログ信号で出力する検出素子部及び前記検出素子部の出力をデジタル信号に変換する信号処理素子部を有し、検出対象物に取付けられ、慣性力に応じたデジタル信号を出力する慣性センサと前記デジタル信号を処理する演算部とを備えた慣性センサユニットであり、前記受信側ユニットは、前記第2のデジタル信号に基づいて前記検出対象物を制御するコントロールユニットであることを特徴とする請求項1記載の通信システム。
【請求項3】
前記第1のレンジ域は、前記検出素子部が検出する前記角速度又は前記加速度の零を中心に正負均等な範囲に対応することを特徴とする請求項2記載の通信システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−233943(P2007−233943A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−57954(P2006−57954)
【出願日】平成18年3月3日(2006.3.3)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年3月3日(2006.3.3)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]