
通信制御装置、通信制御方法及び通信制御システム
【課題】シグナリングを過度に増加させることなく、複数のセカンダリシステムからの累積的な干渉を適切に制御すること。
【解決手段】プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、を備え、前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、通信制御装置を提供する。
【解決手段】プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、を備え、前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、通信制御装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、通信制御装置、通信制御方法及び通信制御システムに関する。
【背景技術】
【0002】
将来の周波数リソースの枯渇を緩和するための対策の1つとして、周波数の二次利用についての議論が進められている。周波数の二次利用とは、あるシステムに優先的に割当てられている周波数チャネルの一部又は全部を、他のシステムが二次的に利用することをいう。一般的に、周波数チャネルが優先的に割当てられているシステムはプライマリシステム(Primary System)、当該周波数チャネルを二次利用するシステムはセカンダリシステム(Secondary System)と呼ばれる。
【0003】
TVホワイトスペースは、二次利用が議論されている周波数チャネルの一例である(非特許文献1参照)。TVホワイトスペースは、プライマリシステムとしてのTV放送システムに割当てられている周波数チャネルのうち、地域に応じて当該TV放送システムにより利用されていないチャネルを指す。このTVホワイトスペースをセカンダリシステムに開放することで、周波数リソースの効率的な活用が実現され得る。TVホワイトスペースの二次利用を可能とするための物理層(PHY)及びMAC層のための標準規格として、例えば、IEEE802.22、IEEE802.11af、及びECMA(European Computer Manufacturer Association)−392(CogNea,下記非特許文献2参照)が挙げられる。
【0004】
周波数帯の二次利用に際して、通常、セカンダリシステムには、プライマリシステムに致命的な干渉を与えることのないような運用が求められる。そのための重要な技術の1つが、送信電力制御である。例えば、下記特許文献1は、セカンダリシステムの基地局においてプライマリシステムの受信装置までの経路損失と周波数チャネル間の離隔周波数幅とを算出し、その算出結果に基づいてセカンダリシステムの最大送信電力を決定する、という手法を提案している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「SECOND REPORT AND ORDER AND MEMORANDUM OPINION AND ORDER」、[online]、[2011年9月6日検索]、インターネット<URL:http://hraunfoss.fcc.gov/edocs_public/attachmatch/FCC-08-260A1.pdf>
【非特許文献2】「Standard ECMA-392 MAC and PHY for Operation in TV White Space」、[online]、[2010年9月6日検索]、インターネット<URL:http://www.ecma-international.org/publications/standards/Ecma-392.htm>
【特許文献】
【0006】
【特許文献1】特開2009−100452号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
セカンダリシステムが複数存在し得る状況では、複数のセカンダリシステムからの累積的な干渉がプライマリシステムにより許容される範囲内に収まるように各セカンダリシステムの送信電力が制御されることが望ましい。その際、各セカンダリシステムの経路損失に応じて複数のセカンダリシステムに送信電力を単純に配分するとすれば、セカンダリシステムの数の増加若しくは減少、又はセカンダリシステムの移動の都度、複数のセカンダリシステムにわたる送信電力値の更新が行われることになる。しかし、そのような頻繁な送信電力値の更新は、シグナリングの増加に起因するシステムのスループットの低下を招来し得る。
【0008】
従って、シグナリングを過度に増加させることなく、複数のセカンダリシステムからの累積的な干渉を適切に制御することのできる仕組みが実現されれば有益である。
【課題を解決するための手段】
【0009】
本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、を備え、前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、通信制御装置が提供される。
【0010】
また、本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、を含み、送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、通信制御方法が提供される。
【0011】
また、本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、を備える通信制御装置と、前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、を含み、前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、通信制御システムが提供される。
【発明の効果】
【0012】
本開示に係る技術によれば、シグナリングを過度に増加させることなく、複数のセカンダリシステムからの累積的な干渉を適切に制御することができる。
【図面の簡単な説明】
【0013】
【図1】周波数の二次利用に際してプライマリシステムのノードが受ける干渉について説明するための説明図である。
【図2】チャネル内の干渉及びチャネル間の干渉について説明するための説明図である。
【図3】一実施形態に係る通信制御システムの構成について説明するための説明図である。
【図4】一実施形態に係る通信制御システムにおいて実行される干渉制御処理の概略的な流れの一例を示すシーケンス図である。
【図5】一実施形態に係る通信制御装置の構成の一例を示すブロック図である。
【図6A】一実施形態に係る電力配分処理の流れの第1の例を示すフローチャートである。
【図6B】一実施形態に係る電力配分処理の流れの第2の例を示すフローチャートである。
【図6C】一実施形態に係る電力配分処理の流れの第3の例を示すフローチャートである。
【図7】一実施形態に係るセカンダリシステム管理テーブルの構成の一例を示す説明図である。
【図8】一実施形態に係る通信制御装置による電力調整処理の流れの一例を示すフローチャートである。
【図9A】図8に示した電力通知判定処理の詳細な流れの第1の例を示すフローチャートである。
【図9B】図8に示した電力通知判定処理の詳細な流れの第2の例を示すフローチャートである。
【図10】図8に示したメッセージ生成処理の詳細な流れの一例を示すフローチャートである。
【図11】追加的な判定処理の流れの一例を示すフローチャートである。
【図12A】プライマリシステムと各セカンダリシステムとの間の距離の定義の第1の例について説明するための説明図である。
【図12B】プライマリシステムと各セカンダリシステムとの間の距離の定義の第2の例について説明するための説明図である。
【図12C】プライマリシステムと各セカンダリシステムとの間の距離の定義の第3の例について説明するための説明図である。
【図12D】プライマリシステムと各セカンダリシステムとの間の距離の定義の第4の例について説明するための説明図である。
【図13】一実施形態に係るセカンダリシステムのマスタノードの構成の一例を示すブロック図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
また、以下の順序で説明を行う。
1.システムの概要
1−1.一実施形態に関連する課題
1−2.通信制御システムの概要
2.基本的な干渉制御モデル
3.セカンダリシステムマネージャの構成例
3−1.各部の説明
3−2.処理の流れ
3−3.プライマリシステムとセカンダリシステムとの間の距離
3−4.チャネル間干渉の項の簡略化
4.マスタノードの構成例
5.変形例
6.まとめ
【0016】
<1.システムの概要>
まず、図1〜図4を参照しながら、一実施形態に関連する課題及び通信制御システムの概要を説明する。
【0017】
[1−1.一実施形態に関連する課題]
図1は、周波数の二次利用に際してプライマリシステムのノードが受ける干渉について説明するための説明図である。図1を参照すると、プライマリシステムのサービスを提供するプライマリ送信局10、及び当該プライマリシステムのサービスエリアの境界12の内部に位置するプライマリ受信局20が示されている。プライマリ送信局10は、例えば、TV放送の放送局であってもよく、又はセルラ通信方式の無線基地局若しくは中継局であってもよい。セルラ通信方式とは、GSM、UMTS、WCDMA、CDMA2000、LTE、LTE−Advanced、IEEE802.16、WiMAX又はWiMAX2などを含み得る。プライマリ送信局10がTV放送の放送局である場合には、プライマリ受信局20は、TV放送の受信用アンテナ及びチューナを有する受信機である。また、プライマリ送信局10がセルラ通信方式の無線基地局である場合には、プライマリ受信局20は、当該セルラ通信方式に従って動作する無線端末である。図1の例において、プライマリ送信局10には、チャネルF1が割当てられている。プライマリ送信局10は、このチャネルF1上で無線信号を送信することにより、TV放送サービス、無線通信サービス又はその他の何らかの無線サービスを提供することができる。
【0018】
図1には、さらに、セカンダリシステムをそれぞれ運用するマスタノード200a、200b、200c及び200dが示されている。各マスタノードは、プライマリシステムに割当てられたチャネルF1又は近傍のチャネルF2若しくはF3を利用して、それぞれセカンダリシステムを運用する。各マスタノードは、IEEE802.22、IEEE802.11又はECMAなどの無線通信方式に準拠し若しくはそれらを部分的に利用する無線アクセスポイントであってもよく、又はセルラ通信方式に準拠し若しくはその規格を部分的に利用する無線基地局若しくは中継局であってもよい。セカンダリシステムがセルラ通信方式に従って運用される場合、そのセルラ通信方式は、プライマリシステムと同じ方式であってもよく又は異なる方式であってもよい。各マスタノードの周囲には、セカンダリシステムの1つ以上のスレーブノード(図示せず)が存在し得る。スレーブノードは、接続相手であるマスタノードと同じ無線通信方式をサポートする。図1の例において、ガードエリアの境界14の外に位置するマスタノード200aは、チャネルF1を利用している。ガードエリアの内部に位置するマスタノード200b及び200cは、それぞれ、チャネルF1の近傍のチャネルF2及びF3を利用している。ガードエリアの境界14の外に位置するマスタノード200dは、チャネルF2を利用している。
【0019】
図1のような状況下で、プライマリ受信局20は、セカンダリ送信局(マスタノード及びスレーブノードの双方)から送信される無線信号に起因する干渉の影響を受ける可能性がある。図2は、チャネル内の(In-band)干渉及びチャネル間の干渉について説明するための説明図である。図2の例において、チャネルF1は、プライマリシステムの利用チャネルである。このチャネルF1を図1のマスタノード200aが二次利用することにより、同一チャネル内での干渉が生じ得る。チャネルF2は、チャネルF1に隣接するチャネルである。チャネルF3は、チャネルF2に隣接するチャネルである。チャネルF1とチャネルF2との間、及びチャネルF2とチャネルF3との間には、保護帯域(Guard Band)が設けられる。これらチャネルF2及びF3を他のシステムが利用した場合に、プライマリシステムが干渉を受けないことが理想的である。しかし、実際には、図2に例示しているように、帯域外輻射を原因として、近傍のチャネル(チャネルF2、F3及び他のチャネルなど)からの無視できない干渉が生じ得る。
【0020】
複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えないためには、セカンダリシステム数の増減又はセカンダリシステムの移動に応じて各セカンダリシステムの送信電力を動的に制御することが望ましい。例えば、図1に示したマスタノード200a、200c及び200dがそれぞれセカンダリシステムを運用している状況において、マスタノード200bが新たに出現した場合、マスタノード200a、200c及び200dに割当てられている送信電力をより低い値に更新することで、マスタノード200bに新たに送信電力を割当てることができる。しかし、セカンダリシステム数の増減又はセカンダリシステムの移動などのイベントの都度複数のセカンダリシステムにわたる送信電力値の更新が行われるとすれば、送信電力値の通知するメッセージがシステム内で頻繁に交換されることになり、シグナリングが増加する。そして、シグナリングの過度な増加は、システムのスループットの低下を招来する。そこで、シグナリングを過度に増加させることなく複数のセカンダリシステムからプライマリシステムへの累積的な干渉を適切に制御するための実施形態について、本明細書で詳細に説明する。
【0021】
[1−2.通信制御システムの概要]
図3は、一実施形態に係る通信制御システム1の構成について説明するための説明図である。図3を参照すると、通信制御システム1は、プライマリ送信局10、データサーバ30、通信制御装置100、並びにマスタノード200a及び200bを含む。なお、図3の例では、セカンダリシステムを運用するマスタノードとしてマスタノード200a及び200bのみを示しているが、実際にはより多くのマスタノードが存在してもよい。本明細書の以降の説明において、特にマスタノード200a及び200b(並びにその他のマスタノード)を相互に区別する必要がない場合には、符号の末尾のアルファベットを省略することによりこれらをマスタノード200と総称する。
【0022】
データサーバ30は、二次利用に関するデータを記憶するデータベースを有するサーバ装置である。データサーバ30は、マスタノード200からのアクセスを受け、二次利用可能なチャネルを表すデータ、及びプライマリシステムの送信局10の位置データなどをマスタノード200に提供する。また、マスタノード200は、二次利用の開始に際して、セカンダリシステムに関する情報をデータサーバ30に登録する。データサーバ30とマスタノード200との間の通信は、例えば、インターネットなどの任意のネットワークを介して行われてよい。このようなデータサーバの仕様の一例については、TVホワイトスペースの二次利用について記述した非特許文献1を参照されたい。
【0023】
通信制御装置100は、複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えないように、各マスタノード200が使用する送信電力を調整する、セカンダリシステムマネージャとしての役割を有する。通信制御装置100は、例えばインターネットなどのネットワークを介してデータサーバ30にアクセス可能であり、送信電力の調整のために使用するデータを、データサーバ30から取得する。また、通信制御装置100は、各マスタノード200とも通信可能に接続される。そして、通信制御装置100は、マスタノード200若しくはプライマリシステムからの要求に応じて、又は周期的に、複数のセカンダリシステムの送信電力を調整する。なお、図3の例に限定されず、通信制御装置100は、データサーバ30又はいずれかのマスタノード200と物理的に同一の装置上に実装されてもよい。
【0024】
図4は、通信制御システム1において実行される干渉制御処理の概略的な流れの一例を示すシーケンス図である。
【0025】
まず、マスタノード200は、セカンダリシステムの運用を開始する前に、セカンダリシステムに関する情報をデータサーバ30に登録する(ステップS10)。ここで登録される情報には、例えば、マスタノード200の装置ID、クラス及び位置データなどが含まれ得る。また、セカンダリシステムに関する情報の登録に応じて、データサーバ30は、二次利用可能な周波数チャネルのチャネル番号のリスト、許容最大送信電力及びスペクトラムマスクなどのセカンダリシステムの構成のための情報を、マスタノード200に通知する。なお、マスタノード200によるデータサーバ30へのアクセスの周期は、周波数利用規制に関する法律の規定に基づいて決定されてもよい。例えば、FCC(Federal Communications Commission)において、マスタノードの位置が変化する場合には位置データの更新を少なくとも60秒ごとに行うべき、という要件が検討されている。また、利用可能なチャネル番号のリストの確認をマスタノードにより少なくとも30秒ごとに行うことが推奨されている。但し、データサーバ30へのアクセスの増加は、オーバヘッドの増加をもたらす。そこで、データサーバ30へのアクセス周期は、より長い周期(例えば、規定される周期の整数倍など)に設定されてもよい。また、アクセス周期は、アクティブなノード数に応じて動的に設定されてもよい(例えば、ノード数が少ない場合には、干渉のリスクが低いため、周期はより長く設定され得る)。アクセス周期は、例えば、セカンダリシステムに関する情報の初期登録の際に、データサーバ30によりマスタノード200へ指示されてもよい。
【0026】
また、通信制御装置100は、例えば周期的に、データサーバ30からプライマリシステムに関する情報を受信し、受信した情報を用いて自装置が記憶している情報を更新する(ステップS11)。ここで受信される情報は、プライマリシステムの送信局10の位置データ、アンテナ高さ、ガードエリアの幅、周波数チャネルのチャネル番号のリスト、プライマリシステムの許容干渉量、後に説明する干渉計算のための基準点の位置データ、登録済みのマスタノード200のIDのリスト及びその他のパラメータ(例えば、近傍チャネル漏れ率(ACLR:Adjacent Channel Leakage Ratio)、フェージングマージン、シャドウイングマージン、保護比率、ACS(Adjacent Channel Selection)など)のうちの1つ以上を含み得る。なお、通信制御装置100は、マスタノード200から間接的にプライマリシステムに関する情報の全部又は一部(例えば、チャネル番号のリストなど)を受信してもよい。
【0027】
次に、マスタノード200は、データサーバ30から通知された情報に基づいて、セカンダリシステムを構成する(ステップS12)。例えば、マスタノード200は、二次利用可能な周波数チャネルから1つ又は複数のチャネルをセカンダリシステムの利用チャネルとして選択する。そして、マスタノード200から通信制御装置100へ、又は通信制御装置100からマスタノード200へ、干渉制御の要求が送信される(ステップS13)。
【0028】
干渉制御の要求に対して応答が返されると、通信制御装置100とマスタノード200との間で相互認証及びアプリケーションレベルの情報の交換が行われる(ステップS14)。また、マスタノード200から通信制御装置100へ、セカンダリシステムに関する情報が送信される(ステップS15)。ここで送信される情報には、例えば、マスタノード200の装置ID、クラス、位置データ、マスタノード200が選択した周波数チャネル(利用チャネル)のチャネル番号、通信品質の要件(QoS(Quality of Service)要件など)に関する情報、優先度情報及び通信履歴などが含まれ得る。
【0029】
次に、通信制御装置100は、データサーバ30及びマスタノード200から取得した情報に基づいて、電力調整処理を実行する(ステップS16)。ここでの通信制御装置100による電力調整処理について、後に詳細に説明する。そして、通信制御装置100は、新たに割当てられる送信電力を通知する電力通知メッセージをマスタノード200へ送信する(ステップS17)。また、通信制御装置100は、新たに割当てられる送信電力を通知すべきと判定される既存のセカンダリシステムのマスタノード200にも、電力通知メッセージを送信する。
【0030】
マスタノード200は、電力通知メッセージを受信すると、通知された送信電力の値に従って自装置の送信回路の出力レベルを設定する(ステップS18)。さらに、マスタノード200は、自装置に接続するスレーブノードへ使用すべき送信電力の値を指示してもよい。マスタノード200は、送信電力の設定を終了すると、セカンダリシステムの構成を通信制御装置100へレポートする(ステップS19)。そして、通信制御装置100は、マスタノード200からのレポートに応じて、自装置が記憶しているセカンダリシステムに関する情報を更新する(ステップS20)。
【0031】
なお、ここでは、データサーバ30が二次利用可能な周波数チャネルのチャネル番号のリストをマスタノード200に提供する例を説明した。しかしながら、データサーバ30の代わりに通信制御装置100が二次利用のために推奨されるチャネルのチャネル番号のリストをマスタノード200に提供してもよい。例えば、既存のセカンダリシステムに利用されていないチャネル、当該チャネルを利用しているセカンダリシステムの数がより少ないチャネル、又は許容干渉量の残余がより多いチャネルがセカンダリシステムに推奨され得る。なお、許容干渉量の残余とは、許容干渉量から既存のセカンダリシステムに起因する干渉量を除いた干渉量を意味する。
【0032】
<2.基本的な干渉制御モデル>
上述したシーケンスのうち、ステップS16における通信制御装置100による電力調整処理は、例えば、以下に説明する干渉制御モデルに基づく処理であってよい。なお、ここでは真値表現を用いて干渉制御モデルの数式を記述するが、本干渉制御モデルは、数式を変換することでデシベル値表現にも対応可能である。
【0033】
まず、干渉計算上の基準点(リファレンスポイント)をi、プライマリシステムに割当てられた周波数チャネルをfj、プライマリシステムの許容干渉量をIacceptable(i,fj)とする。また、チャネルfjを二次利用する単一のセカンダリシステムkがガードエリアの外周上に位置しているとする。すると、セカンダリシステムの最大送信電力Pmax(fj,k)、最小離隔距離(ガードエリアの幅)についての経路損失L(i,fj,k)、及び許容干渉量Iacceptable(i,fj)の間に次の関係式が成立する。
【0034】
【数1】

【0035】
なお、基準点の位置は、図4のステップS11において通信制御装置100がデータサーバ30から受信する情報に基づいて決定され得る。基準点が予め定義される場合には、当該基準点の位置を表す位置データ(例えば、緯度及び経度など)がデータサーバ30から受信されてもよい。また、通信制御装置100は、データサーバ30から受信されるプライマリシステムのノード、サービスエリア又はガードエリアの位置データ、及び各マスタノード200から受信される位置データを用いて、基準点の位置を動的に決定してもよい。
【0036】
セカンダリシステムが複数存在する場合には、各セカンダリシステムへの送信電力の割当ては、式(1)を拡張することにより得られる次の関係式を満たしていることが求められる。
【0037】
【数2】
【0038】
ここで、式(2)の右辺の第1項は、プライマリシステムに割当てられたチャネルfjと同一のチャネルを二次利用するセカンダリシステムに起因する干渉量の総和を表す。Mjは同一チャネルを二次利用するセカンダリシステムの数、P(fj,k)はk番目のセカンダリシステムに割当てられる電力、L(i,fj,k)はk番目のセカンダリシステムとプライマリシステムの基準点iとの間の経路損失、G(fj,k)は利得成分である。また、第2項は、チャネルfjとは異なる近傍のチャネルを二次利用するセカンダリシステムに起因する干渉量の総和を表す。Ojは近傍チャネルの数、jjは近傍チャネルのインデックス、Njjは近傍チャネルを二次利用するセカンダリシステムの数、kkは近傍チャネルを二次利用するセカンダリシステムのインデックス、H(fj,fjj,kk)は近傍チャネルfjjからチャネルfjへのセカンダリシステムkkについての損失成分である。なお、上記Mj及びNjjは、アクティブなセカンダリシステム(若しくはマスタノード)の数であってもよい。
【0039】
式(2)における利得成分Gは、主に次の表1に示す要因に基づいて決定され得る。
【0040】
【表1】
【0041】
例えば、表1の保護比率PRについては、次のような考え方が適用され得る。即ち、チャネルfCRを二次利用するセカンダリシステムからチャネルfBSを利用するプライマリシステムへの許容干渉量をIacceptableとする。また、プライマリシステムの所要受信電力をPreq(fBS)とする。これらパラメータの間には、次のような式が成立する。
【0042】
【数3】
【0043】
なお、保護比率がデシベル表記である場合には、上記式(3)の代わりに、次のような式が用いられ得る。
【0044】
【数4】
【0045】
式(2)における損失成分Hは、例えば、近傍チャネルの選択性(selectivity)及び漏洩率(leakage ratio)に依存する。なお、これら利得成分及び損失成分の詳細については、例えば“Technical and operational requirements for the possible operation of cognitive radio systems in the "white spaces" of the frequency band 470-790 MHz”(ECC Report 159, 2010)を参照されたい。
【0046】
<3.セカンダリシステムマネージャの構成例>
図5は、図3に例示した通信制御装置100(即ち、セカンダリシステムマネージャ)の構成の一例を示すブロック図である。図5を参照すると、通信制御装置100は、通信部110、記憶部120及び制御部130を備える。制御部130は、電力配分部140及び通知部150を含む。
【0047】
[3−1.各部の説明]
(1)通信部
通信部110は、通信制御装置100によるデータサーバ30及びマスタノード200との間の通信のための通信インタフェースである。通信制御装置100とデータサーバ30及びマスタノード200との間の通信は、それぞれ、有線通信若しくは無線通信又はそれらの組合せのいずれにより実現されてもよい。
【0048】
(2)記憶部
記憶部120は、ハードディスク又は半導体メモリなどの記憶媒体を用いて、通信制御装置100の動作のためのプログラム及びデータを記憶する。例えば、記憶部120は、データサーバ30から受信されるプライマリシステムに関する情報、及び各セカンダリシステムのマスタノード200から受信されるセカンダリシステムに関する情報を記憶する。本実施形態において、記憶部120は、電力配分部140及び通知部150により参照され又は更新されるセカンダリシステム管理テーブル122を有する。セカンダリシステム管理テーブル122の構成の一例について、後に具体的に説明する。
【0049】
(3)電力配分部
電力配分部140は、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する。プライマリシステムのために保護される周波数チャネルとは、プライマリシステムに割当てられた周波数チャネル及びその近傍の周波数チャネルを含み得る。本明細書において、電力配分部140による電力配分計算の結果としてセカンダリシステムごとに算出される第1の送信電力を、許容送信電力という。一方、後に説明する通知部150は、電力配分部140により配分された許容送信電力の値に応じて決定される第2の送信電力の値を、所定の通知条件が満たされる場合に各セカンダリシステムに通知する。本明細書において、このように各セカンダリシステムに通知される第2の送信電力を、割当て送信電力という。以下、電力配分部140により実行され得る電力配分処理の3つの例を説明する。
【0050】
(3−1)第1の例
図6Aは、電力配分部140による電力配分処理の流れの第1の例を示すフローチャートである。第1の例において、電力配分部140は、周波数チャネルごとに当該周波数チャネルを二次利用するセカンダリシステムに送信電力を暫定的に配分した後、異なる周波数チャネル間の影響を考慮して、暫定的に配分した送信電力を再配分する。そして、電力配分部140は、配分後又は再配分後の送信電力を、上述した干渉制御モデルにおける式(2)を充足するように修正する。
【0051】
図6Aを参照すると、まず、電力配分部140は、データサーバ30から提供されたプライマリシステムに関する情報を、記憶部120から取得する(ステップS101)。また、電力配分部140は、マスタノード200から収集されたセカンダリシステムに関する情報を、記憶部120から取得する(ステップS102)。次に、電力配分部140は、セカンダリシステムにより利用される周波数チャネルごとに、ステップS103の処理を繰り返す。
【0052】
ステップS103において、電力配分部140は、ある1つの注目チャネルを利用するセカンダリシステム間で、送信電力を暫定的に配分する(ステップS103)。送信電力の暫定的な配分は、例えば、以下に説明する固定マージン方式、均等方式及び不均等方式の3種類の方式のいずれかに従って行われてよい。
【0053】
(固定マージン方式)
第1の方式は、固定マージン方式である。固定マージン方式の場合、予め固定的に設定される配分マージンMI(及びセーフティマージンSM)を用いて、各セカンダリシステムに配分される送信電力が簡易に算出される。この場合、送信電力の配分のための計算コストが小さくなる。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0054】
【数5】
【0055】
(均等方式)
第2の方式は、均等方式である。均等方式の場合、各セカンダリシステムに配分される送信電力は互いに等しくなる。即ち、複数のセカンダリシステムに公平に送信電力が配分される。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0056】
【数6】
【0057】
(不均等方式)
第3の方式は、不均等方式である。不均等方式の場合、プライマリシステムとの間の距離が大きいセカンダリシステムほど多くの送信電力が配分される。それにより、全体として二次利用の機会をより高めることができる。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0058】
【数7】
【0059】
また、均等方式及び不均等方式は、次に説明する与干渉マージン低減方式と組合せられてもよい。
【0060】
(与干渉マージン低減方式)
与干渉マージン低減方式は、干渉のリスクを低減するためのセーフティマージンSMを算入する方式であり、上述した均等方式又は不均等方式と組合せて用いられ得る。送信電力P(fj,k)は、均等方式との組合せについては次の式(8)、不均等方式との組合せについては次の式(9)により導かれる。なお、SMは、予め設定され又はマスタノード200から通知されるセーフティマージンを表す。
【0061】
【数8】
【0062】
さらに、上述した各方式は、次に説明する重み付け配分方式と組合せられてもよい。
【0063】
(重み付け配分方式)
重み付け配分方式は、セカンダリシステムごとの優先度に応じて送信電力の配分を重み付けする方式である。送信電力P(fj,k)は、均等方式との組合せについては次の式(10)、不均等方式との組合せについては次の式(11)により導かれる。また、送信電力P(fj,k)は、均等方式及び与干渉マージン低減方式との組合せについては次の式(10´)、不均等方式及び与干渉マージン低減方式との組合せについては次の式(11´)により導かれる。なお、wkは、優先度に応じた重みを表す。なお、セカンダリシステムごとの重みwkの代わりに、周波数チャネルごとの重みwjが用いられてもよい。
【0064】
【数9】
【0065】
なお、プライマリシステムにおいて周波数チャネルfjjの許容干渉量Iacceptable(i,fjj)のみが定義され、近傍の周波数チャネルfjの許容干渉量が定義されないケースがあり得る。例えば、周波数チャネルfjjがプライマリシステムに割当てられたチャネルであり、その近傍チャネルfjはプライマリシステムにより利用されないものの保護されるチャネルである場合には、そのようなケースが生じ得る。その場合、近傍チャネルfjを二次利用するセカンダリシステムに送信電力を配分するための配分式は、上述した各配分式において、許容干渉量Iacceptable(i,fj)をIacceptable(i,fjj)に置き換えると共に、経路損失及び利得成分の項L(i,fj,k)・G(fj,k)を損失成分を算入する項L(i,fj,k)・G(fj,k)/H(fjj,fj,k)に置き換えることで導かれる。一例として、固定マージン方式の配分式は次のように変形され得る。
【0066】
【数10】
【0067】
セカンダリシステムにより利用される全ての周波数チャネルについてステップS103の処理を終了すると、電力配分部140は、さらにチャネル間の干渉を算入して、セカンダリシステム間で送信電力を再配分する(ステップS104)。例えば、均等方式における送信電力の再配分は、次の式(12)(与干渉マージン低減方式との組合せの場合には式(12´))に従って行われ得る。
【0068】
【数11】
【0069】
式(12)は、プライマリシステムの許容干渉量から近傍チャネルの利用に起因する干渉量を差し引いた後に残る許容干渉量が残りのセカンダリシステム間で再配分されることを意味する。同様に、不均等方式における送信電力の再配分は、次の式(13)(与干渉マージン低減方式との組合せの場合には式(13´))に従って行われ得る。
【0070】
【数12】
【0071】
なお、当然ながら、再配分のための上述した各数式に、重み付け配分方式における重みがさらに適用されてもよい。
【0072】
次に、電力配分部140は、再配分後の送信電力に基づいて評価される干渉量が最も厳しい地点を、プライマリシステムのサービスエリア内で探索する(ステップS105)。例えば、干渉量が最も厳しい地点i´は、次の式(14)又は式(14´)のように探索される。
【0073】
【数13】
【0074】
次に、電力配分部140は、地点i´での総干渉量と許容干渉量Iacceptable(i,fj)とに基づいて、電力配分の修正係数Δを次式のように計算する(ステップS106)。
【0075】
【数14】
【0076】
なお、上記式(15´)は、電力配分に際して与干渉マージン低減方式が適用される場合に使用され得る。
【0077】
そして、電力配分部140は、算出した修正係数Δを用いて送信電力を次式に従って修正し、セカンダリシステムkの許容送信電力P´´(fj,k)を導出する(ステップS107)。
【0078】
【数15】
【0079】
なお、異なる周波数チャネル間の影響を考慮しない場合には、上述した送信電力の再配分(図6AのステップS104)は省略されてもよい。その場合、式(13)〜式(16)において、送信電力P´(fj,k)及びP´(fjj,kk)の代わりに、送信電力P(fj,k)及びP(fjj,kk)がそれぞれ用いられ得る。
【0080】
(3−2)第2の例
図6Bは、電力配分部140による電力配分処理の流れの第2の例を示すフローチャートである。第2の例において、電力配分部140は、第1の例と同様、周波数チャネルごとに当該周波数チャネルを二次利用するセカンダリシステムに送信電力を暫定的に配分した後、異なる周波数チャネル間の影響を考慮して、暫定的に配分した送信電力を再配分する。但し、第2の例においては、電力配分部140は、暫定的に配分した送信電力を、例えばセカンダリシステムごと又は周波数チャネルごとの優先度に応じて、段階的に確定させていく。
【0081】
図6Bの例において、電力配分部140は、まず、第1の例と同様にして、セカンダリシステムにより利用される全ての周波数チャネルについて、チャネルごとに送信電力を暫定的に配分する(ステップS101〜ステップS103)。次に、電力配分部140は、暫定的に配分された送信電力が上述した干渉制御モデルにおける式(2)を充足するか否かを判定する(ステップS109)。ここで、式(2)が充足されない場合には、処理はステップS110へ進む。
【0082】
ステップS110では、電力配分部140は、電力配分が未確定のセカンダリシステムのうち、より優先度の高いセカンダリシステムの電力配分を確定させる(ステップS110)。例えば、電力配分部140は、より優先度の高いセカンダリシステムに暫定的に配分された送信電力を、そのまま当該セカンダリシステムの許容送信電力として確定してもよい。その代わりに、電力配分部140は、例えば、暫定的に配分された送信電力に優先度に応じた重みを乗算して得た値を、当該セカンダリシステムの許容送信電力として確定してもよい。
【0083】
次に、電力配分部140は、チャネル間の干渉を算入して、電力配分が未確定の残りのセカンダリシステムに送信電力を再配分する(ステップS111)。ここでの再配分の計算式は、上述した式(12)又は式(13)などと同様であってよい。
【0084】
その後、ステップS109において式(2)が充足される場合には、電力配分部140は、全てのセカンダリシステムについて、暫定的に配分された送信電力又は再配分された送信電力を許容送信電力として確定する(ステップS112)。
【0085】
(3−3)第3の例
電力配分処理の第3の例では、電力配分部140は、第1の例及び第2の例と異なり、周波数チャネルごとに送信電力を暫定的に配分するステップを経ることなく、送信電力の割当てを決定する。
【0086】
まず、式(2)の左辺と右辺との差をDjとすると、式(2)を次のように表すことができる。
【0087】
【数16】
【0088】
ここで、各周波数チャネルについての許容干渉量Iacceptable(i,fj)(j=1,…,Oj)が与えられるものと仮定する。また、Mj+Njj個のセカンダリシステムの各々に割当てられる送信電力をPs(s=1,…,Mj+Njj)とする。すると、式(17)を拡張することにより、Oj次元の許容干渉量ベクトルとMj+Njj次元の送信電力ベクトルとの間に、次の関係式が成立する。
【0089】
【数17】
【0090】
式(18)に現れる、j番目の周波数チャネルについてのs番目のセカンダリシステムの送信電力Psにかかる係数as,jは、上述した干渉制御モデルにおける経路損失L、利得成分G及び損失成分Hに基づいて算出され得る。従って、電力配分部140は、式(18)の係数行列を算出した後、式(18)の解を導出することにより、送信電力ベクトル(P1,…,PMj+Njj)を算出することができる。
【0091】
許容干渉量ベクトルをIacceptable、送信電力ベクトルをPv、係数行列をAとする。すると、式(18)は次のように表される。なお、マージンに相当するベクトルDの要素は、固定値又はゼロであってもよい。
【0092】
【数18】
【0093】
例えば、セカンダリシステムの数Mj+Njjが周波数チャネルの数Ojと等しい場合には、電力配分部140は、正方行列となる係数行列Aの逆行列を用いて、次のように送信電力ベクトル(P1,…,PMj+Njj)を算出することができる。
【0094】
【数19】
【0095】
なお、セカンダリシステムの数Mj+Njjと周波数チャネルの数Ojとが等しくない場合には、電力配分部140は、送信電力ベクトルの複数の解から選択される1つの送信電力ベクトルを、各セカンダリシステムに割当てるべき送信電力の解として決定してもよい。また、式(18)の解は、近似的な解であってもよい。また、セカンダリシステムの数Mj+Njjの代わりに、次式の通りチャネルごとに考慮すべきセカンダリシステムの数を積算した数を、送信電力ベクトルの次元数として扱ってもよい。
【0096】
【数20】
【0097】
図6Cは、電力配分部140による電力配分処理の流れの第3の例を示すフローチャートである。
【0098】
図6Cを参照すると、まず、電力配分部140は、データサーバ30から提供されたプライマリシステムに関する情報を、記憶部120から取得する(ステップS101)。ここで取得される情報には、式(18)の許容干渉量ベクトルIacceptableが含まれる。また、電力配分部140は、マスタノード200から収集されたセカンダリシステムに関する情報を、記憶部120から取得する(ステップS102)。
【0099】
次に、電力配分部140は、上述した干渉制御モデルに従って、送信電力ベクトルPtxと許容干渉量ベクトルIacceptableとの間の関係式の係数行列Aを算出する(ステップS114)。それにより、式(18)のような送信電力ベクトルPtxと許容干渉量ベクトルIacceptableとの間の関係式が形成される。そして、電力配分部140は、形成された関係式を解くことにより、送信電力の配分を決定し、送信電力ベクトルの各要素を各セカンダリシステムの許容送信電力とする(ステップS115)。
【0100】
なお、ここで説明した3つの電力配分処理は例に過ぎない。即ち、電力配分部140により他の手法でセカンダリシステムに送信電力が配分されてもよい。また、図4では、新たなセカンダリシステムの出現(即ち、セカンダリシステム数の増加)に応じて送信電力が調整される例を示している。しかしながら、より一般的には、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含む様々なイベントに応じて、又は周期的に許容送信電力が更新され、次に説明する通知部150により所定の通知条件が判定されてよい。
【0101】
(4)通知部
通知部150は、電力配分部140により配分された許容送信電力の値に応じて、割当て送信電力の値を決定する。そして、通知部150は、所定の通知条件が満たされる場合に、決定した割当て送信電力の値を各セカンダリシステムに通知する。割当て送信電力の値は、典型的には、許容送信電力の値から所定のマージンを除くことにより決定されてよい。例えば、チャネルfjについてセカンダリシステムkに配分された許容送信電力の値をPtmp(fj,k)とすると、割当て送信電力の値Ptx(fj,k)は、マージンZを用いて次式のように決定され得る。
【0102】
【数21】
【0103】
マージンZの値は、固定値として予め通信制御装置100により記憶されていてもよく、又は例えば許容送信電力の値Ptmp若しくはその他のパラメータに応じて動的に決定されてもよい。また、チャネルごとに異なるマージンZの値が用いられてもよい。
【0104】
通知部150がセカンダリシステムに割当て送信電力の値を新たに通知するための通知条件は、当該セカンダリシステムについての割当て送信電力の前回通知された値と新たに配分された許容送信電力の値とを用いて表され得る。あるセカンダリシステムについて、割当て送信電力の前回通知された値をPtx,prev、新たに配分された許容送信電力の値をPtmp,new、Ptmp,newから式(22)に従って決定される新たな割当て送信電力の値をPtx,newとする。すると、通知条件は、次式で表され得る。
【0105】
【数22】
【0106】
式(23)は、割当て送信電力の前回通知された値Ptx,prevが新たに配分された許容送信電力の値Ptmp,newよりも大きいことを意味する。かかる不等式が満たされる場合、最新の状況に応じて計算される許容送信電力よりも大きい送信電力をセカンダリシステムが使用している。そこで、通知部150は、セカンダリシステムにより使用される送信電力を引き下げるために、新たな割当て送信電力の値Ptx,newをセカンダリシステムに通知する。
【0107】
式(24)は、新たに配分された許容送信電力の値Ptmp,newに応じて決定される割当て送信電力の新たな値Ptx,newから割当て送信電力の前回通知された値Ptx,prevを引いた差が所定の閾値Thtxよりも大きいことを意味する。かかる不等式が満たされる場合、セカンダリシステムが現在使用している送信電力を最新の状況に応じて計算される割当て送信電力にまで引き上げても、プライマリシステムに過剰な干渉が生じない。そこで、通知部150は、セカンダリシステムの送信電力を引き上げて通信機会を拡大するために、新たな割当て送信電力の値Ptx,newをセカンダリシステムに通知する。閾値Thtxは、固定値として予め通信制御装置100により記憶されていてもよく、又は例えば割当て送信電力の値Ptx,prev若しくはその他のパラメータに応じて動的に決定されてもよい。
【0108】
なお、通知部150は、新たに出現したセカンダリシステムには、上記通知条件の判定を行うことなく新たな割当て送信電力の値Ptx,newを通知してよい。
【0109】
式(22)に示したように、本実施形態においてセカンダリシステムに通知される割当て送信電力の値には、マージンZが算入されている。即ち、割当て送信電力の値は、許容送信電力の値から所定のマージンを除いた値である。従って、セカンダリシステム数の増減又はセカンダリシステムの移動などの状況の変化に応じて許容送信電力が低下し得る場合にも、許容送信電力がセカンダリシステムにより使用されている送信電力を下回るまでの猶予が残される。そして、許容送信電力がセカンダリシステムにより使用されている送信電力を下回らない限りは、当該セカンダリシステムの割当て送信電力は更新されない。また、許容送信電力が上昇し得る場合にも、その上昇幅があるレベル(上記閾値Thtxに対応するレベル)を上回るまで、セカンダリシステムの割当て送信電力は更新されない。従って、プライマリシステムへの過剰な干渉を回避しつつ、割当て送信電力の通知のためのシグナリングの増加が抑制される。
【0110】
典型的には、割当て送信電力の値は、所定の更新単位(例えば、1dBm又は5dBmなど)の整数倍で離散的に更新され得る。通知部150は、例えば、各セカンダリシステムに割当て送信電力の差分値をシグナリングすることにより、各セカンダリシステムに割当て送信電力の新たな値を通知してもよい。割当て送信電力の差分値dPtxは、次式により計算され得る。
【0111】
【数23】
【0112】
通知部150は、シグナリングのオーバヘッドを一層削減するために、上記所定の更新単位を用いて量子化された差分値をシグナリングし得る。更新単位をpunitとすると、dPtxは、次式のように量子化され得る。
【0113】
【数24】
【0114】
従って、通知部150から各セカンダリシステムへ送信される電力通知メッセージは、各セカンダリシステムのマスタノード200のアドレスに加えて、上記量子化された割当て送信電力の差分値dPtx,quantizedを含み得る。それにより、割当て送信電力の新たな値Ptx,newそのものが電力通知メッセージに含まれる場合と比較して、メッセージのビット長を削減することができる。
【0115】
通知部150は、上記通知条件の判定に加えて、プライマリシステムへの累積的な干渉量が許容干渉量に違反しないかを判定し、累積的な干渉量が許容干渉量に違反しない場合には割当て送信電力の新たな値をセカンダリシステムに通知しなくてもよい。
【0116】
プライマリシステムへの累積的な干渉量は、次式のように、1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づくプライマリシステムへの干渉量の総和Iest(i,fj)として推定され得る。なお、次式において、新たなセカンダリシステムについては割当て送信電力の新たな値Ptx,new、既存のセカンダリシステムについては割当て送信電力の前回通知された値Ptx,prevが送信電力値Ptxとして用いられる。
【0117】
【数25】
【0118】
割当て送信電力の新たな値のセカンダリシステムへの通知は、プライマリシステムへの干渉量の総和Iest(i,fj)が次式を満たす場合にのみ行われ得る。
【0119】
【数26】
【0120】
なお、式(28)において、Iacceptable(i,fj)は、基準点iにおけるチャネルfjについての許容干渉量を表す。このような追加的な判定により、割当て送信電力の通知のためのシグナリングの増加は、一層効果的に抑制される。
【0121】
図7は、本実施形態において記憶部120が有するセカンダリシステム管理テーブル122の構成の一例を示す説明図である。図7を参照すると、セカンダリシステム管理テーブル122は、「チャネル番号」、「システムID」、「許容送信電力」、「マージン量」、「割当て送信電力」及び「更新日時」という5つのデータ項目を有する。「チャネル番号」は、二次利用可能な各周波数チャネルを識別する番号である。「システムID」は、セカンダリシステムを一意に識別する識別子である。システムIDとして、セカンダリシステムのマスタノード200の装置IDが用いられてもよい。「許容送信電力」は、各セカンダリシステムに通知された割当て送信電力に対応する許容送信電力の値を示す。「マージン量」は、各セカンダリシステムに通知された割当て送信電力を決定する際に許容送信電力の値から除かれたマージンZの値を示す。「割当て送信電力」は、各セカンダリシステムに通知された割当て送信電力の値を示す。「更新日時」は、セカンダリシステム管理テーブル122の各レコードが更新された日時を示す。
【0122】
通知部150は、上述したような通知条件が満たされる場合に、割当て送信電力の値を各セカンダリシステムに通知し、セカンダリシステム管理テーブル122の「許容送信電力」、「マージン量」、「割当て送信電力」及び「更新日時」を更新する。そして、セカンダリシステム管理テーブル122内のこれらデータは、通知部150による次回の通知条件の判定の際に参照される。
【0123】
[3−2.処理の流れ]
次に、図8〜図11を用いて、本実施形態に係る通信制御装置100による処理の流れについて説明する。
【0124】
(1)電力調整処理
図8は、通信制御装置100による電力調整処理の流れの一例を示すフローチャートである。図8を参照すると、まず、図6A〜図6Cに例示したいずれかの手法に従って、電力配分部140により電力配分処理が行われる(ステップS100)。その後のステップS130〜S180の処理は、各セカンダリシステムについて繰り返される。
【0125】
ステップS130において、通知部130は、1つのセカンダリシステム(以下、対象システムという)に注目し、電力通知判定処理を行う(ステップS130)。ここでの電力通知判定処理の詳細な流れの一例について、後にさらに説明する。電力通知判定処理において、対象システムに割当て送信電力を通知しないと判定されると、その後の処理はスキップされる(ステップS140)。
【0126】
電力通知判定処理において、対象システムに割当て送信電力を通知すると判定されると、通知部130は、メッセージ生成処理を行い、対象システム宛ての電力通知メッセージを生成する(ステップS160)。そして、通知部130は、生成した電力通知メッセージを通信部110から対象システムへ送信する(ステップS170)。さらに、通知部130は、セカンダリシステム管理テーブル122に記憶されている対象システムの許容送信電力、マージン量及び割当て送信電力のデータを更新する(ステップS180)。
【0127】
これら処理が全てのセカンダリシステム(又は全てのアクティブなセカンダリシステム)について終了すると、図8に示した電力調整処理は終了する。
【0128】
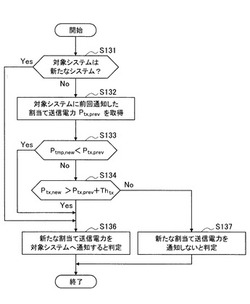
(2)電力通知判定処理
図9Aは、図8のステップS130に相当する電力通知判定処理の詳細な流れの第1の例を示すフローチャートである。
【0129】
図9Aを参照すると、まず、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS131)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、通知部150は、対象システムに新たな割当て送信電力を通知すると判定する(ステップS136)。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS132へ進む。
【0130】
ステップS132において、通知部150は、対象システムに前回通知した割当て送信電力の値Ptx,prevをセカンダリシステム管理テーブル122から取得する(ステップS132)。そして、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,new及び前回通知された割当て送信電力の値Ptx,prevを用いて、上述した通知条件が満たされるかを判定する。例えば、Ptmp,new<Ptx,prevである場合には、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS133)。また、Ptx,prev+Thtx<Ptx,new=Ptmp,new−Zである場合にも、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS134)。上述した通知条件が満たされない場合には、処理はステップS137へ進む。
【0131】
処理がステップS136へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知すると判定する(ステップS136)。一方、処理がステップS137へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知しないと判定する(ステップS137)。
【0132】
図9Bは、図8のステップS130に相当する電力通知判定処理の詳細な流れの第2の例を示すフローチャートである。なお、ここでは、通信制御装置100が各セカンダリシステムにおいて出力可能な最大の送信電力値Ptx,maxを知っているものとする。
【0133】
図9Bを参照すると、まず、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS131)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、通知部150は、対象システムに新たな割当て送信電力を通知すると判定する(ステップS136)。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS132へ進む。
【0134】
ステップS132において、通知部150は、対象システムに前回通知した割当て送信電力の値Ptx,prevをセカンダリシステム管理テーブル122から取得する(ステップS132)。そして、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,new及び前回通知された割当て送信電力の値Ptx,prevを用いて、上述した通知条件が満たされるかを判定する。例えば、Ptmp,new<Ptx,prevである場合には、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS133)。また、Ptx,prev+Thtx<Ptx,newである場合にも、上述した通知条件が満たされる。但し、第2の例においては、通知部150は、Ptx,newを対象システムの最大送信電力値Ptx,maxとさらに比較する。そして、Ptx,newがPtx,max以下である場合にのみ、処理はステップS136へ進む(ステップS134)。一方、上述した通知条件が満たされない場合、又はPtx,newがPtx,maxを上回る場合には、処理はステップS137へ進む。
【0135】
処理がステップS136へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知すると判定する(ステップS136)。一方、処理がステップS137へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知しないと判定する(ステップS137)。
【0136】
第2の例においては、対象システムにとって出力可能な範囲を超える過剰な送信電力の割当てが行われず、割当て送信電力を通知するためのシグナリングを一層削減することができる。通信制御装置100は、各セカンダリシステムの要求送信電力の最小値をも保持しておき、割当て送信電力が要求送信電力の当該最小値を下回る対象システムを、電力割当ての対象から除外してもよい。
【0137】
なお、図8に例示した電力調整処理のトリガとなるイベントは、典型的には、次の3種類のイベントEv1〜Ev3を含む。
Ev1)セカンダリシステム数の増加
Ev2)セカンダリシステム数の減少
Ev3)セカンダリシステムの移動
このうち、イベントEv1の場合には、既存のセカンダリシステムの割当て送信電力は通常増加しないことから、図9AのステップS134又は図9BのステップS134及びS135の判定は省略されてもよい。同様に、イベントEv2の場合には、既存のセカンダリシステムの許容送信電力は通常減少しないことから、図9A又は図9BのステップS133の判定は省略されてもよい。イベントEv2は、セカンダリシステムからの明示的な離脱の通知により認識されてもよく、又は事前に登録され得る周期で監視されるセカンダリシステムからの信号(ビーコンなど)の未受信により認識されてもよい。セカンダリシステムからの周期的な信号が受信されない場合には、さらに所定の待機時間の経過を待って、イベントEv2が発生したと判定されてもよい。それにより、セカンダリシステムのマスタノードの一時的な電源オフ又はスリープが生じた場合のセカンダリシステムの減少及び増加に起因する不要なシグナリングの発生を防ぐことができる。
【0138】
(3)メッセージ生成処理
図10は、図8のステップS160に相当するメッセージ生成処理の詳細な流れの一例を示すフローチャートである。
【0139】
図10を参照すると、まず、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,newからマージンZを除くことにより、新たな割当て送信電力の値Ptx,newを決定する(ステップS161)。
【0140】
次に、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS162)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、処理はステップS165へ進む。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS163へ進む。
【0141】
ステップS163において、通知部150は、割当て送信電力の差分値dPtx=Ptx,new−Ptx,prevを計算する(ステップS163)。さらに、通知部150は、計算された差分値dPtxを更新単位punitを用いて量子化する(ステップS164)。一方、ステップS165では、通知部150は、新たな割当て送信電力の値Ptx,newを更新単位punitを用いて量子化する(ステップS165)。
【0142】
そして、通知部150は、例えば量子化された割当て送信電力の値(既存のセカンダリシステムについては差分値)を示すフィールドを含み、対象システムのマスタノード200のアドレスを宛て先とする電力通知メッセージを生成する(ステップS166)。
【0143】
このように生成される電力通知メッセージが、図8のステップS170において、通信制御装置100から対象システムのマスタノード200へ送信され得る。
【0144】
(4)追加判定処理
図11は、上述した式(27)及び式(28)を用いた累積的な干渉量の判定のための判定処理の流れの一例を示すフローチャートである。かかる判定処理は、図8のステップS130の電力通知判定処理に加えて実行されてよい。
【0145】
図11を参照すると、まず、通知部150は、新たなセカンダリシステムについて新たに配分された割当て送信電力の値Ptx,newを取得する(ステップS151)。また、通知部150は、既存のセカンダリシステムに前回通知された割当て送信電力の値Ptx,prevを取得する(ステップS152)。次に、通知部150は、式(27)に従って、プライマリシステムへの干渉量の総和Iestを推定する(ステップS153)。そして、通知部150は、推定した干渉量の総和Iestがプライマリシステムの許容干渉量Iacceptableに違反するかを判定する(ステップS154)。ここで、推定した干渉量の総和Iestが許容干渉量Iacceptableに違反する場合には、通知部150は、新たな割当て送信電力の値を既存のシステムの各々へ通知すると判定する(ステップS155)。一方、推定した干渉量の総和Iestが許容干渉量Iacceptableに違反しない場合には、通知部150は、新たな割当て送信電力の値を既存のシステムには通知しないと判定する(ステップS156)。
【0146】
[3−3.プライマリシステムとセカンダリシステムとの間の距離]
上述した電力配分処理においては、セカンダリシステムごとの経路損失を導出するために、プライマリシステムと各セカンダリシステムとの間の距離を決定することが求められる。プライマリシステムと各セカンダリシステムとの間の距離は、例えば、以下に説明するいずれかの例に従って定義され得る。
【0147】
(1)第1の例
第1の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置からプライマリシステムのサービスエリアの外周までの最短距離である。
【0148】
例えば、図12Aには、プライマリシステムのサービスエリアの外周に相当する境界12と4つのセカンダリシステムとが示されている。第1、第2及び第3のセカンダリシステムは、プライマリシステムのサービスエリアの外部に位置する。第1、第2及び第3のセカンダリシステムからプライマリシステムのサービスエリアの外周までの最短距離は、それぞれd01、d02及びd03である。一方、第4のセカンダリシステムは、プライマリシステムのサービスエリアの内部に位置する。第4のセカンダリシステムについて経路損失を導出する際には、プライマリシステムとセカンダリシステムとの間の距離はゼロとみなされてもよい。その場合、経路損失は最大となる。その代わりに、第4のセカンダリシステムから境界12までの最短距離が、プライマリシステムと第4のセカンダリシステムとの間の距離として扱われてもよい。
【0149】
(2)第2の例
第2の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置からプライマリシステムのサービスエリアの外周上又は当該外周内の特定の1点までの距離である。特定の1点とは、例えば、ある1つのセカンダリシステムから最も近いプライマリシステムのサービスエリアの外周上の地点であってもよい。また、特定の1点とは、例えば、複数のセカンダリシステムからの距離の和が最小となる地点などであってもよい。この地点は、セカンダリシステムからの干渉を受けるプライマリシステムの仮想的な受信局が位置する地点であると考えられ得る。
【0150】
例えば、図12Bには、境界12と4つのセカンダリシステムとが再び示されている。第1、第2及び第3のセカンダリシステムは、プライマリシステムのサービスエリアの外部に位置する。ここで、第1のセカンダリシステムから最も近い境界12上の点をP1とする。第1、第2及び第3のセカンダリシステムとプライマリシステムとの間の距離は、第1、第2及び第3のセカンダリシステムのそれぞれの位置と点P1との間の距離d11、d12及びd13に相当する。一方、第4のセカンダリシステムは、プライマリシステムのサービスエリアの内部に位置する。第4のセカンダリシステムについて経路損失を取得する際には、第1の例と同様、プライマリシステムとセカンダリシステムとの間の距離はゼロとみなされてもよい。その代わりに、第4のセカンダリシステムと点P1との間の距離がプライマリシステムと第4のセカンダリシステムとの間の距離として扱われてもよい。
【0151】
図12Bにおいて、点P2は、境界12上で第1、第2及び第3のセカンダリシステムからの距離の和が最小となる点である。このような点P2が点P1の代わりに使用されてもよい。なお、例えば、セカンダリシステムの多くがプライマリシステムのガードエリアから離れた位置にある場合、プライマリ受信局が狭い地理的領域内にのみ存在することが既知である場合、又は特定の地点において許容干渉量が著しく厳しい場合などにおいては、予め決定される特定の地点が距離算出のための基準点として使用されてもよい。また、変調方式ごとに異なる複数の許容干渉量が規定されている場合には、距離だけではなく変調方式又は複数の許容干渉量を考慮して基準点が選択されてもよい。
【0152】
第1の例と第2の例とを比較すると、第1の例の場合には、距離の算出がより容易である一方で、経路損失の値が過剰に小さく見積もられる可能性がある。例えば、2つのセカンダリシステムがプライマリシステムを挟んで反対側に位置する場合に、そのような状況は生じ得る。その場合、セカンダリシステムに割当てられる送信電力は、より小さい値となる。従って、第1の例は、計算コストがより低く、干渉防止の観点でより安全な定義と言える。一方、第2の例では、経路損失の値が過剰に小さく見積もられる可能性が少ないため、二次利用の機会をより高めることができる。
【0153】
(3)第3の例
第3の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置から最も近傍のプライマリ受信局までの距離である。例えば、図12Cには、3つのセカンダリシステム及び3つのプライマリ受信局が示されている。第1のセカンダリシステムの最も近傍には、第1のプライマリ受信局が位置する。第1のセカンダリシステムと第1のプライマリ受信局との間の距離はd21である。第2のセカンダリシステムの最も近傍には、第2のプライマリ受信局が位置する。第2のセカンダリシステムと第2のプライマリ受信局との間の距離はd22である。第3のセカンダリシステムの最も近傍には、第3のプライマリ受信局が位置する。第3のセカンダリシステムと第3のプライマリ受信局との間の距離はd23である。従って、第1のセカンダリシステムとプライマリシステムとの間の距離としてd21、第2のセカンダリシステムとプライマリシステムとの間の距離としてd22、第3のセカンダリシステムとプライマリシステムとの間の距離としてd23がそれぞれ使用され得る。
【0154】
(4)第4の例
第4の例において、プライマリシステムと各セカンダリシステムとの間の距離は、全てのセカンダリシステムの位置からの距離の総和が最も小さいプライマリ受信局までの距離である。例えば、図12Dには、3つのセカンダリシステム及び3つのプライマリ受信局が再び示されている。このうち、3つのセカンダリシステムの位置からの距離の総和が最も小さいプライマリ受信局は、第2のプライマリ受信局である。第1のセカンダリシステムと第2のプライマリ受信局との間の距離はd31である。第2のセカンダリシステムと第2のプライマリ受信局との間の距離はd32である。第3のセカンダリシステムと第2のプライマリ受信局との間の距離はd33である。従って、第1のセカンダリシステムとプライマリシステムとの間の距離としてd31、第2のセカンダリシステムとプライマリシステムとの間の距離としてd32、第3のセカンダリシステムとプライマリシステムとの間の距離としてd33がそれぞれ使用され得る。
【0155】
第3及び第4の例の例においては、実際のプライマリ受信局の位置が距離の算出のための基準点となるため、より現実に即した干渉量の見積もりが可能となる。
【0156】
図12A〜図12Dの例では、プライマリシステムとセカンダリシステムとの間の距離の算出にあたって主にプライマリシステム側の基準点をどのように設定すべきかについて説明した。これに対し、セカンダリシステム側の基準点についても、様々な設定の手法が考えられる。例えば、セカンダリシステム側の基準点の位置は、単純にセカンダリシステムのマスタであるマスタノード200の位置であってもよい。その代わりに、セカンダリシステム側の基準点の位置は、セカンダリシステムのノード(マスタノード及びスレーブノード)のうちプライマリシステムのガードエリア又はいずれかのプライマリ受信局の最も近くのノードの位置であってもよい。また、計算が複雑になるものの、セカンダリシステムの複数のノードの位置を基準として複数の距離が算出され、当該複数の距離に応じて総合的な経路損失が計算されてもよい。これらセカンダリシステム側の基準点の設定の手法は、それぞれ、図12A〜図12Dに例示したどのプライマリシステム側の基準点の設定の手法と組み合わせられてもよい。
【0157】
また、例えば、セカンダリシステム側の基準点は、例えば、次のように段階的に設定されてもよい。まず、セカンダリシステム側の基準点を暫定的にセカンダリシステムのマスタであるマスタノード200とする。次に、マスタノード200から最も近くのプライマリシステムのサービスエリアの外周上の1点又は最も近くのプライマリ受信局の地点をプライマリシステム側の基準点とする。次に、プライマリシステム側の上記基準点に与える干渉を、セカンダリシステムのノード(マスタノード及びスレーブノード)の各々について見積もる。そして、プライマリシステム側の上記基準点に最大の干渉を与えるセカンダリシステム側のノードの位置を、セカンダリシステム側の最終的な基準点に設定する。セカンダリシステムのノードごとの干渉の見積もりに際しては、ノードの種類(マスタノード又はスレーブノードノード)に応じて異なる送信電力が考慮されてもよい。
【0158】
[3−4.チャネル間干渉の項の簡略化]
上述した電力配分部140による電力配分処理の第1の例において、チャネル間干渉を評価する項は、固定的な又は可変的なマージン量に置き換えられてもよい。チャネルfjにおけるマージン量をRint,jとすると、上述した式(13)〜式(15)は、次の式(29)〜式(31)のように変換され得る。
【0159】
【数27】
【0160】
上記式(29)〜式(31)は、各セカンダリシステムからプライマリシステムへのチャネル間干渉が各セカンダリシステムの経路損失に依存しない簡略化された手法で評価されることを意味する。マージン量Rint,jは、典型的には、チャネルfjの近傍チャネルを利用しているセカンダリシステム数に応じて設定され得る。例えば、次の式(32)の例では、マージン量Rint,jは近傍チャネルを利用しているセカンダリシステム数の合計に等しい。式(33)の例では、近傍チャネルからの損失成分Hに応じた重み付けが行われる。式(34)の例では、損失成分Hが重み係数γjjに置き換えられている(例えば、重み係数γjjはチャネル間の間隔が大きくなるにつれてより小さい値に設定され得る)。
【0161】
【数28】
【0162】
このようなチャネル間干渉項の置き換えの結果、あるチャネルを二次利用するセカンダリシステムの移動を原因として当該チャネルの近傍チャネルを二次利用するセカンダリシステムに配分される許容送信電力の値が変化しにくくなる。それにより、上述した通知条件が満たされる頻度が減少し、シグナリングの増加が抑制される。
【0163】
さらに、式(32)〜式(34)における各近傍チャネルのセカンダリシステム数Njjを実際の数から名目上の数N´jjに置き換える。各近傍チャネルの名目上のセカンダリシステム数N´jjは、例えば次の更新条件が満たされるまで更新されない。
【0164】
【数29】
【0165】
各近傍チャネルの実際のセカンダリシステム数Njj及び名目上のセカンダリシステム数N´jjが上記更新条件を満たしていると判定されると、名目上のセカンダリシステム数N´jjは、次のいずれかの式に従って更新され得る。なお、各式中のパラメータdN1、dN2及びdN3は、予め定義され得る追加パラメータである。
【0166】
【数30】
【0167】
各近傍チャネルの名目上のセカンダリシステム数N´jjの更新は、例えば図6AのフローチャートのステップS102の後に電力配分部140により行われてよい。このような名目上のセカンダリシステム数N´jjを導入することにより、チャネル間干渉を評価するためのマージン量Rint,jが、実際のセカンダリシステム数の変化に完全には追随せず、名目上のセカンダリシステム数N´jjの更新を待って変化することになる。従って、あるチャネルを二次利用するセカンダリシステム数の増減によって、当該チャネルの近傍チャネルを二次利用するセカンダリシステムに配分される許容送信電力の値が変化しにくくなる。結果として、上述した通知条件が満たされる頻度をさらに減少させることができる。
【0168】
<4.マスタノードの構成例>
図13は、上述した通信制御装置100により割当てられる送信電力を用いてセカンダリシステムを運用する通信装置であるマスタノード200の構成の一例を示すブロック図である。図13を参照すると、マスタノード200は、通信部210、制御部220、記憶部230及び無線通信部240を備える。
【0169】
通信部210は、マスタノード200によるデータサーバ30及び通信制御装置100との間の通信のための通信インタフェースとして動作する。通信部210は、制御部220による制御の下、例えば、二次利用の開始に際して、セカンダリシステムに関する情報をデータサーバ30に送信する。また、通信部210は、データサーバ30から通知される情報を受信する。また、通信部210は、通信制御装置100との間で、干渉制御の要求及び応答を送受信する。さらに、通信部210は、通信制御装置100から電力通知メッセージを受信し、受信したメッセージを制御部220へ出力する。
【0170】
制御部220は、マスタノード200の動作全般を制御する役割を有する。例えば、制御部220は、図4に例示したシーケンスに従って通信制御装置100と連携することで、セカンダリシステムの運用に際してのプライマリシステムへの干渉を抑制する。より具体的には、制御部220は、通信制御装置100から受信される電力通知メッセージにより示されている割当て送信電力の値を参照する。そして、制御部220は、割当て送信電力の範囲内の送信電力を、セカンダリシステムの運用のために無線通信部240に設定する。制御部220は、例えば、割当て送信電力をセカンダリシステムに参加するノードの間でさらに配分してもよい。
【0171】
記憶部230は、ハードディスク又は半導体メモリなどの記憶媒体を用いて、通信制御装置100との連携及びセカンダリシステムの運用のために使用されるプログラム及びデータを記憶する。
【0172】
無線通信部240は、マスタノード200と当該マスタノード200に接続するスレーブノードとの間の無線通信のための無線通信インタフェースとして動作する。無線通信部240は、例えば、IEEE802.22、IEEE802.11af又はECMA−392に従って、1つ以上のスレーブノードとの間で、無線信号を送受信する。無線通信部240により送信される無線信号の送信電力は、上述した割当て送信電力の範囲内で制御部220により制御され得る。
【0173】
<5.変形例>
本明細書では、セカンダリシステムの送信電力を調整するための様々な計算処理をセカンダリシステムマネージャとしての役割を有する通信制御装置100が行う例について主に説明した。図3に関連して説明したように、通信制御装置100は、データサーバ30又はいずれかのマスタノード200と物理的に同一の装置上に実装されてもよい。また、上述した計算処理の一部が、物理的に異なる装置上で行われてもよい。
【0174】
例えば、上述した干渉制御モデルに基づく比較的複雑な計算をする第1の装置とは別に、簡易なパラメータ計算を行う第2の装置が設けられてもよい。この場合、例えば、配分マージンMIの取得、セーフティマージンSMの取得、許容送信電力からの割当て送信電力の計算、又は割当て送信電力の差分値の計算及びその量子化などが、第2の装置により行われてよい。第2の装置は、配分マージンMIを固定値とする代わりに、例えば、セカンダリシステム数に依存する次のいずれかの計算式に従って配分マージンMIを計算してもよい。
【0175】
【数31】
【0176】
式(39)において、Npotential_max_interferersは、同時に干渉源となり得るセカンダリシステムの潜在的な最大数を表す。Npotential_max_interferersが2であればMIは約3.0[dB]、3であればMIは約4.8[dB]、4であればMIは約6.0[dB]となる。一方、式(40)において、Nactive_interferers(fWSD)は、チャネルfWSDを同時に二次利用するアクティブなセカンダリシステム数を表す。なお、次のように、MIの計算式にオフセット値dMIが加算されてもよい。
【0177】
【数32】
【0178】
<6.まとめ>
ここまで、図1〜図13を用いて本開示に係る技術の一実施形態について詳細に説明した。上述した実施形態によれば、プライマリシステムのために保護される周波数チャネルを二次利用するセカンダリシステムに送信電力を割当てる際、セカンダリシステム間で配分される許容送信電力に応じて決定される割当て送信電力が各セカンダリシステムに通知される。かかる通知は、送信電力の更新に際して、前回通知された割当て送信電力の値及び新たに配分された許容送信電力の値が所定の通知条件を満たす場合にのみ行われる。従って、セカンダリシステム数が変化し又はセカンダリシステムが移動した場合に、送信電力を通知するためのシグナリングは複数のセカンダリシステムにわたって必ずしも発生しない。よって、シグナリングの増加を抑制することができる。
【0179】
上記通知条件は、前回通知された割当て送信電力の値が新たに配分された許容送信電力の値よりも大きいという条件を含み得る。かかる構成によれば、プライマリシステムへの干渉量が許容干渉量を超える可能性がある場合には、新たな割当て送信電力の値がセカンダリシステムへ通知される。従って、複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えることが適切に防止される。
【0180】
また、上記通知条件は、新たに決定される割当て送信電力の値から前回通知された割当て送信電力の値を引いた差が所定の閾値よりも大きいという条件を含み得る。かかる構成によれば、許容送信電力が上昇する場合に、その上昇幅が所定の閾値を上回るまで、セカンダリシステムの割当て送信電力は維持される。従って、シグナリングの増加の抑制と割当て送信電力の引き上げによる通信機会の拡大との間でバランスをとることができる。
【0181】
また、セカンダリシステムマネージャが二次利用のためのチャネルをセカンダリシステムに推奨することにより、将来的に発生する送信電力の調整において許容送信電力の値が大きく変化する可能性を低減し、シグナリングの増加を予防することも可能である。
【0182】
なお、本明細書において説明した各装置による一連の制御処理は、ソフトウェア、ハードウェア、及びソフトウェアとハードウェアとの組合せのいずれを用いて実現されてもよい。ソフトウェアを構成するプログラムは、例えば、各装置の内部又は外部に設けられる記憶媒体に予め格納される。そして、各プログラムは、例えば、実行時にRAM(Random Access Memory)に読み込まれ、CPU(Central Processing Unit)などのプロセッサにより実行される。
【0183】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0184】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、
を備え、
前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、
通信制御装置。
(2)
前記所定の条件は、前記第2の送信電力の前回通知された値が前記電力配分部により新たに配分された前記第1の送信電力の値よりも大きいという条件を含む、前記(1)に記載の通信制御装置。
(3)
前記所定の条件は、新たに配分された前記第1の送信電力の値に応じて決定される前記第2の送信電力の新たな値から前記第2の送信電力の前回通知された値を引いた差が所定の閾値よりも大きいという条件を含む、前記(1)又は前記(2)に記載の通信制御装置。
(4)
前記第2の送信電力の値は、前記第1の送信電力の値から所定のマージンを除くことにより決定される、前記(1)〜(3)のいずれか1項に記載の通信制御装置。
(5)
前記通知部は、既存のセカンダリシステムに配分された前記第2の送信電力の新たな値が当該セカンダリシステムにおいて出力可能な送信電力の最大値よりも大きい場合には、前記第2の送信電力の新たな値を当該セカンダリシステムに通知しない、前記(1)〜(4)のいずれか1項に記載の通信制御装置。
(6)
前記電力配分部は、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含むイベントに応じて又は周期的に、前記第1の送信電力の配分計算を実行する、前記(1)〜(5)のいずれか1項に記載の通信制御装置。
(7)
前記通知部は、送信電力の更新に際して、前記1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づく前記プライマリシステムへの干渉量の総和を前記プライマリシステムの許容干渉量とさらに比較し、前記干渉量の総和が前記許容干渉量に違反する場合にのみ、既存のセカンダリシステムに前記第2の送信電力の新たな値を通知する、前記(1)〜(6)のいずれか1項に記載の通信制御装置。
(8)
前記通知部は、各セカンダリシステムに前記第2の送信電力の前回の通知からの差分値をシグナリングすることにより、前記第2の送信電力の新たな値を通知する、前記(1)〜(7)のいずれか1項に記載の通信制御装置。
(9)
前記第2の送信電力の値は、所定の更新単位の整数倍で離散的に更新され、
前記通知部は、前記所定の更新単位を用いて量子化された前記差分値をシグナリングする、
前記(8)に記載の通信制御装置。
(10)
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を各セカンダリシステムの経路損失に依存しない簡略化された手法で評価することにより、前記1つ以上のセカンダリシステムに送信電力を配分する、前記(1)〜(9)のいずれか1項に記載の通信制御装置。
(11)
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を、各チャネルの実際のセカンダリシステム数に完全には追随しない名目上のセカンダリシステム数を用いて評価する、前記(10)に記載の通信制御装置。
(12)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、
を含み、
送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、
通信制御方法。
(13)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、
を備える通信制御装置と、
前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、
を含み、
前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、
通信制御システム。
【符号の説明】
【0185】
1 通信制御システム
10 プライマリ送信局
20 プライマリ受信局
100 通信制御装置
140 電力配分部
150 通知部
200 セカンダリシステムのマスタノード
【技術分野】
【0001】
本開示は、通信制御装置、通信制御方法及び通信制御システムに関する。
【背景技術】
【0002】
将来の周波数リソースの枯渇を緩和するための対策の1つとして、周波数の二次利用についての議論が進められている。周波数の二次利用とは、あるシステムに優先的に割当てられている周波数チャネルの一部又は全部を、他のシステムが二次的に利用することをいう。一般的に、周波数チャネルが優先的に割当てられているシステムはプライマリシステム(Primary System)、当該周波数チャネルを二次利用するシステムはセカンダリシステム(Secondary System)と呼ばれる。
【0003】
TVホワイトスペースは、二次利用が議論されている周波数チャネルの一例である(非特許文献1参照)。TVホワイトスペースは、プライマリシステムとしてのTV放送システムに割当てられている周波数チャネルのうち、地域に応じて当該TV放送システムにより利用されていないチャネルを指す。このTVホワイトスペースをセカンダリシステムに開放することで、周波数リソースの効率的な活用が実現され得る。TVホワイトスペースの二次利用を可能とするための物理層(PHY)及びMAC層のための標準規格として、例えば、IEEE802.22、IEEE802.11af、及びECMA(European Computer Manufacturer Association)−392(CogNea,下記非特許文献2参照)が挙げられる。
【0004】
周波数帯の二次利用に際して、通常、セカンダリシステムには、プライマリシステムに致命的な干渉を与えることのないような運用が求められる。そのための重要な技術の1つが、送信電力制御である。例えば、下記特許文献1は、セカンダリシステムの基地局においてプライマリシステムの受信装置までの経路損失と周波数チャネル間の離隔周波数幅とを算出し、その算出結果に基づいてセカンダリシステムの最大送信電力を決定する、という手法を提案している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「SECOND REPORT AND ORDER AND MEMORANDUM OPINION AND ORDER」、[online]、[2011年9月6日検索]、インターネット<URL:http://hraunfoss.fcc.gov/edocs_public/attachmatch/FCC-08-260A1.pdf>
【非特許文献2】「Standard ECMA-392 MAC and PHY for Operation in TV White Space」、[online]、[2010年9月6日検索]、インターネット<URL:http://www.ecma-international.org/publications/standards/Ecma-392.htm>
【特許文献】
【0006】
【特許文献1】特開2009−100452号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
セカンダリシステムが複数存在し得る状況では、複数のセカンダリシステムからの累積的な干渉がプライマリシステムにより許容される範囲内に収まるように各セカンダリシステムの送信電力が制御されることが望ましい。その際、各セカンダリシステムの経路損失に応じて複数のセカンダリシステムに送信電力を単純に配分するとすれば、セカンダリシステムの数の増加若しくは減少、又はセカンダリシステムの移動の都度、複数のセカンダリシステムにわたる送信電力値の更新が行われることになる。しかし、そのような頻繁な送信電力値の更新は、シグナリングの増加に起因するシステムのスループットの低下を招来し得る。
【0008】
従って、シグナリングを過度に増加させることなく、複数のセカンダリシステムからの累積的な干渉を適切に制御することのできる仕組みが実現されれば有益である。
【課題を解決するための手段】
【0009】
本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、を備え、前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、通信制御装置が提供される。
【0010】
また、本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、を含み、送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、通信制御方法が提供される。
【0011】
また、本開示によれば、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、を備える通信制御装置と、前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、を含み、前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、通信制御システムが提供される。
【発明の効果】
【0012】
本開示に係る技術によれば、シグナリングを過度に増加させることなく、複数のセカンダリシステムからの累積的な干渉を適切に制御することができる。
【図面の簡単な説明】
【0013】
【図1】周波数の二次利用に際してプライマリシステムのノードが受ける干渉について説明するための説明図である。
【図2】チャネル内の干渉及びチャネル間の干渉について説明するための説明図である。
【図3】一実施形態に係る通信制御システムの構成について説明するための説明図である。
【図4】一実施形態に係る通信制御システムにおいて実行される干渉制御処理の概略的な流れの一例を示すシーケンス図である。
【図5】一実施形態に係る通信制御装置の構成の一例を示すブロック図である。
【図6A】一実施形態に係る電力配分処理の流れの第1の例を示すフローチャートである。
【図6B】一実施形態に係る電力配分処理の流れの第2の例を示すフローチャートである。
【図6C】一実施形態に係る電力配分処理の流れの第3の例を示すフローチャートである。
【図7】一実施形態に係るセカンダリシステム管理テーブルの構成の一例を示す説明図である。
【図8】一実施形態に係る通信制御装置による電力調整処理の流れの一例を示すフローチャートである。
【図9A】図8に示した電力通知判定処理の詳細な流れの第1の例を示すフローチャートである。
【図9B】図8に示した電力通知判定処理の詳細な流れの第2の例を示すフローチャートである。
【図10】図8に示したメッセージ生成処理の詳細な流れの一例を示すフローチャートである。
【図11】追加的な判定処理の流れの一例を示すフローチャートである。
【図12A】プライマリシステムと各セカンダリシステムとの間の距離の定義の第1の例について説明するための説明図である。
【図12B】プライマリシステムと各セカンダリシステムとの間の距離の定義の第2の例について説明するための説明図である。
【図12C】プライマリシステムと各セカンダリシステムとの間の距離の定義の第3の例について説明するための説明図である。
【図12D】プライマリシステムと各セカンダリシステムとの間の距離の定義の第4の例について説明するための説明図である。
【図13】一実施形態に係るセカンダリシステムのマスタノードの構成の一例を示すブロック図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
また、以下の順序で説明を行う。
1.システムの概要
1−1.一実施形態に関連する課題
1−2.通信制御システムの概要
2.基本的な干渉制御モデル
3.セカンダリシステムマネージャの構成例
3−1.各部の説明
3−2.処理の流れ
3−3.プライマリシステムとセカンダリシステムとの間の距離
3−4.チャネル間干渉の項の簡略化
4.マスタノードの構成例
5.変形例
6.まとめ
【0016】
<1.システムの概要>
まず、図1〜図4を参照しながら、一実施形態に関連する課題及び通信制御システムの概要を説明する。
【0017】
[1−1.一実施形態に関連する課題]
図1は、周波数の二次利用に際してプライマリシステムのノードが受ける干渉について説明するための説明図である。図1を参照すると、プライマリシステムのサービスを提供するプライマリ送信局10、及び当該プライマリシステムのサービスエリアの境界12の内部に位置するプライマリ受信局20が示されている。プライマリ送信局10は、例えば、TV放送の放送局であってもよく、又はセルラ通信方式の無線基地局若しくは中継局であってもよい。セルラ通信方式とは、GSM、UMTS、WCDMA、CDMA2000、LTE、LTE−Advanced、IEEE802.16、WiMAX又はWiMAX2などを含み得る。プライマリ送信局10がTV放送の放送局である場合には、プライマリ受信局20は、TV放送の受信用アンテナ及びチューナを有する受信機である。また、プライマリ送信局10がセルラ通信方式の無線基地局である場合には、プライマリ受信局20は、当該セルラ通信方式に従って動作する無線端末である。図1の例において、プライマリ送信局10には、チャネルF1が割当てられている。プライマリ送信局10は、このチャネルF1上で無線信号を送信することにより、TV放送サービス、無線通信サービス又はその他の何らかの無線サービスを提供することができる。
【0018】
図1には、さらに、セカンダリシステムをそれぞれ運用するマスタノード200a、200b、200c及び200dが示されている。各マスタノードは、プライマリシステムに割当てられたチャネルF1又は近傍のチャネルF2若しくはF3を利用して、それぞれセカンダリシステムを運用する。各マスタノードは、IEEE802.22、IEEE802.11又はECMAなどの無線通信方式に準拠し若しくはそれらを部分的に利用する無線アクセスポイントであってもよく、又はセルラ通信方式に準拠し若しくはその規格を部分的に利用する無線基地局若しくは中継局であってもよい。セカンダリシステムがセルラ通信方式に従って運用される場合、そのセルラ通信方式は、プライマリシステムと同じ方式であってもよく又は異なる方式であってもよい。各マスタノードの周囲には、セカンダリシステムの1つ以上のスレーブノード(図示せず)が存在し得る。スレーブノードは、接続相手であるマスタノードと同じ無線通信方式をサポートする。図1の例において、ガードエリアの境界14の外に位置するマスタノード200aは、チャネルF1を利用している。ガードエリアの内部に位置するマスタノード200b及び200cは、それぞれ、チャネルF1の近傍のチャネルF2及びF3を利用している。ガードエリアの境界14の外に位置するマスタノード200dは、チャネルF2を利用している。
【0019】
図1のような状況下で、プライマリ受信局20は、セカンダリ送信局(マスタノード及びスレーブノードの双方)から送信される無線信号に起因する干渉の影響を受ける可能性がある。図2は、チャネル内の(In-band)干渉及びチャネル間の干渉について説明するための説明図である。図2の例において、チャネルF1は、プライマリシステムの利用チャネルである。このチャネルF1を図1のマスタノード200aが二次利用することにより、同一チャネル内での干渉が生じ得る。チャネルF2は、チャネルF1に隣接するチャネルである。チャネルF3は、チャネルF2に隣接するチャネルである。チャネルF1とチャネルF2との間、及びチャネルF2とチャネルF3との間には、保護帯域(Guard Band)が設けられる。これらチャネルF2及びF3を他のシステムが利用した場合に、プライマリシステムが干渉を受けないことが理想的である。しかし、実際には、図2に例示しているように、帯域外輻射を原因として、近傍のチャネル(チャネルF2、F3及び他のチャネルなど)からの無視できない干渉が生じ得る。
【0020】
複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えないためには、セカンダリシステム数の増減又はセカンダリシステムの移動に応じて各セカンダリシステムの送信電力を動的に制御することが望ましい。例えば、図1に示したマスタノード200a、200c及び200dがそれぞれセカンダリシステムを運用している状況において、マスタノード200bが新たに出現した場合、マスタノード200a、200c及び200dに割当てられている送信電力をより低い値に更新することで、マスタノード200bに新たに送信電力を割当てることができる。しかし、セカンダリシステム数の増減又はセカンダリシステムの移動などのイベントの都度複数のセカンダリシステムにわたる送信電力値の更新が行われるとすれば、送信電力値の通知するメッセージがシステム内で頻繁に交換されることになり、シグナリングが増加する。そして、シグナリングの過度な増加は、システムのスループットの低下を招来する。そこで、シグナリングを過度に増加させることなく複数のセカンダリシステムからプライマリシステムへの累積的な干渉を適切に制御するための実施形態について、本明細書で詳細に説明する。
【0021】
[1−2.通信制御システムの概要]
図3は、一実施形態に係る通信制御システム1の構成について説明するための説明図である。図3を参照すると、通信制御システム1は、プライマリ送信局10、データサーバ30、通信制御装置100、並びにマスタノード200a及び200bを含む。なお、図3の例では、セカンダリシステムを運用するマスタノードとしてマスタノード200a及び200bのみを示しているが、実際にはより多くのマスタノードが存在してもよい。本明細書の以降の説明において、特にマスタノード200a及び200b(並びにその他のマスタノード)を相互に区別する必要がない場合には、符号の末尾のアルファベットを省略することによりこれらをマスタノード200と総称する。
【0022】
データサーバ30は、二次利用に関するデータを記憶するデータベースを有するサーバ装置である。データサーバ30は、マスタノード200からのアクセスを受け、二次利用可能なチャネルを表すデータ、及びプライマリシステムの送信局10の位置データなどをマスタノード200に提供する。また、マスタノード200は、二次利用の開始に際して、セカンダリシステムに関する情報をデータサーバ30に登録する。データサーバ30とマスタノード200との間の通信は、例えば、インターネットなどの任意のネットワークを介して行われてよい。このようなデータサーバの仕様の一例については、TVホワイトスペースの二次利用について記述した非特許文献1を参照されたい。
【0023】
通信制御装置100は、複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えないように、各マスタノード200が使用する送信電力を調整する、セカンダリシステムマネージャとしての役割を有する。通信制御装置100は、例えばインターネットなどのネットワークを介してデータサーバ30にアクセス可能であり、送信電力の調整のために使用するデータを、データサーバ30から取得する。また、通信制御装置100は、各マスタノード200とも通信可能に接続される。そして、通信制御装置100は、マスタノード200若しくはプライマリシステムからの要求に応じて、又は周期的に、複数のセカンダリシステムの送信電力を調整する。なお、図3の例に限定されず、通信制御装置100は、データサーバ30又はいずれかのマスタノード200と物理的に同一の装置上に実装されてもよい。
【0024】
図4は、通信制御システム1において実行される干渉制御処理の概略的な流れの一例を示すシーケンス図である。
【0025】
まず、マスタノード200は、セカンダリシステムの運用を開始する前に、セカンダリシステムに関する情報をデータサーバ30に登録する(ステップS10)。ここで登録される情報には、例えば、マスタノード200の装置ID、クラス及び位置データなどが含まれ得る。また、セカンダリシステムに関する情報の登録に応じて、データサーバ30は、二次利用可能な周波数チャネルのチャネル番号のリスト、許容最大送信電力及びスペクトラムマスクなどのセカンダリシステムの構成のための情報を、マスタノード200に通知する。なお、マスタノード200によるデータサーバ30へのアクセスの周期は、周波数利用規制に関する法律の規定に基づいて決定されてもよい。例えば、FCC(Federal Communications Commission)において、マスタノードの位置が変化する場合には位置データの更新を少なくとも60秒ごとに行うべき、という要件が検討されている。また、利用可能なチャネル番号のリストの確認をマスタノードにより少なくとも30秒ごとに行うことが推奨されている。但し、データサーバ30へのアクセスの増加は、オーバヘッドの増加をもたらす。そこで、データサーバ30へのアクセス周期は、より長い周期(例えば、規定される周期の整数倍など)に設定されてもよい。また、アクセス周期は、アクティブなノード数に応じて動的に設定されてもよい(例えば、ノード数が少ない場合には、干渉のリスクが低いため、周期はより長く設定され得る)。アクセス周期は、例えば、セカンダリシステムに関する情報の初期登録の際に、データサーバ30によりマスタノード200へ指示されてもよい。
【0026】
また、通信制御装置100は、例えば周期的に、データサーバ30からプライマリシステムに関する情報を受信し、受信した情報を用いて自装置が記憶している情報を更新する(ステップS11)。ここで受信される情報は、プライマリシステムの送信局10の位置データ、アンテナ高さ、ガードエリアの幅、周波数チャネルのチャネル番号のリスト、プライマリシステムの許容干渉量、後に説明する干渉計算のための基準点の位置データ、登録済みのマスタノード200のIDのリスト及びその他のパラメータ(例えば、近傍チャネル漏れ率(ACLR:Adjacent Channel Leakage Ratio)、フェージングマージン、シャドウイングマージン、保護比率、ACS(Adjacent Channel Selection)など)のうちの1つ以上を含み得る。なお、通信制御装置100は、マスタノード200から間接的にプライマリシステムに関する情報の全部又は一部(例えば、チャネル番号のリストなど)を受信してもよい。
【0027】
次に、マスタノード200は、データサーバ30から通知された情報に基づいて、セカンダリシステムを構成する(ステップS12)。例えば、マスタノード200は、二次利用可能な周波数チャネルから1つ又は複数のチャネルをセカンダリシステムの利用チャネルとして選択する。そして、マスタノード200から通信制御装置100へ、又は通信制御装置100からマスタノード200へ、干渉制御の要求が送信される(ステップS13)。
【0028】
干渉制御の要求に対して応答が返されると、通信制御装置100とマスタノード200との間で相互認証及びアプリケーションレベルの情報の交換が行われる(ステップS14)。また、マスタノード200から通信制御装置100へ、セカンダリシステムに関する情報が送信される(ステップS15)。ここで送信される情報には、例えば、マスタノード200の装置ID、クラス、位置データ、マスタノード200が選択した周波数チャネル(利用チャネル)のチャネル番号、通信品質の要件(QoS(Quality of Service)要件など)に関する情報、優先度情報及び通信履歴などが含まれ得る。
【0029】
次に、通信制御装置100は、データサーバ30及びマスタノード200から取得した情報に基づいて、電力調整処理を実行する(ステップS16)。ここでの通信制御装置100による電力調整処理について、後に詳細に説明する。そして、通信制御装置100は、新たに割当てられる送信電力を通知する電力通知メッセージをマスタノード200へ送信する(ステップS17)。また、通信制御装置100は、新たに割当てられる送信電力を通知すべきと判定される既存のセカンダリシステムのマスタノード200にも、電力通知メッセージを送信する。
【0030】
マスタノード200は、電力通知メッセージを受信すると、通知された送信電力の値に従って自装置の送信回路の出力レベルを設定する(ステップS18)。さらに、マスタノード200は、自装置に接続するスレーブノードへ使用すべき送信電力の値を指示してもよい。マスタノード200は、送信電力の設定を終了すると、セカンダリシステムの構成を通信制御装置100へレポートする(ステップS19)。そして、通信制御装置100は、マスタノード200からのレポートに応じて、自装置が記憶しているセカンダリシステムに関する情報を更新する(ステップS20)。
【0031】
なお、ここでは、データサーバ30が二次利用可能な周波数チャネルのチャネル番号のリストをマスタノード200に提供する例を説明した。しかしながら、データサーバ30の代わりに通信制御装置100が二次利用のために推奨されるチャネルのチャネル番号のリストをマスタノード200に提供してもよい。例えば、既存のセカンダリシステムに利用されていないチャネル、当該チャネルを利用しているセカンダリシステムの数がより少ないチャネル、又は許容干渉量の残余がより多いチャネルがセカンダリシステムに推奨され得る。なお、許容干渉量の残余とは、許容干渉量から既存のセカンダリシステムに起因する干渉量を除いた干渉量を意味する。
【0032】
<2.基本的な干渉制御モデル>
上述したシーケンスのうち、ステップS16における通信制御装置100による電力調整処理は、例えば、以下に説明する干渉制御モデルに基づく処理であってよい。なお、ここでは真値表現を用いて干渉制御モデルの数式を記述するが、本干渉制御モデルは、数式を変換することでデシベル値表現にも対応可能である。
【0033】
まず、干渉計算上の基準点(リファレンスポイント)をi、プライマリシステムに割当てられた周波数チャネルをfj、プライマリシステムの許容干渉量をIacceptable(i,fj)とする。また、チャネルfjを二次利用する単一のセカンダリシステムkがガードエリアの外周上に位置しているとする。すると、セカンダリシステムの最大送信電力Pmax(fj,k)、最小離隔距離(ガードエリアの幅)についての経路損失L(i,fj,k)、及び許容干渉量Iacceptable(i,fj)の間に次の関係式が成立する。
【0034】
【数1】
【0035】
なお、基準点の位置は、図4のステップS11において通信制御装置100がデータサーバ30から受信する情報に基づいて決定され得る。基準点が予め定義される場合には、当該基準点の位置を表す位置データ(例えば、緯度及び経度など)がデータサーバ30から受信されてもよい。また、通信制御装置100は、データサーバ30から受信されるプライマリシステムのノード、サービスエリア又はガードエリアの位置データ、及び各マスタノード200から受信される位置データを用いて、基準点の位置を動的に決定してもよい。
【0036】
セカンダリシステムが複数存在する場合には、各セカンダリシステムへの送信電力の割当ては、式(1)を拡張することにより得られる次の関係式を満たしていることが求められる。
【0037】
【数2】
【0038】
ここで、式(2)の右辺の第1項は、プライマリシステムに割当てられたチャネルfjと同一のチャネルを二次利用するセカンダリシステムに起因する干渉量の総和を表す。Mjは同一チャネルを二次利用するセカンダリシステムの数、P(fj,k)はk番目のセカンダリシステムに割当てられる電力、L(i,fj,k)はk番目のセカンダリシステムとプライマリシステムの基準点iとの間の経路損失、G(fj,k)は利得成分である。また、第2項は、チャネルfjとは異なる近傍のチャネルを二次利用するセカンダリシステムに起因する干渉量の総和を表す。Ojは近傍チャネルの数、jjは近傍チャネルのインデックス、Njjは近傍チャネルを二次利用するセカンダリシステムの数、kkは近傍チャネルを二次利用するセカンダリシステムのインデックス、H(fj,fjj,kk)は近傍チャネルfjjからチャネルfjへのセカンダリシステムkkについての損失成分である。なお、上記Mj及びNjjは、アクティブなセカンダリシステム(若しくはマスタノード)の数であってもよい。
【0039】
式(2)における利得成分Gは、主に次の表1に示す要因に基づいて決定され得る。
【0040】
【表1】
【0041】
例えば、表1の保護比率PRについては、次のような考え方が適用され得る。即ち、チャネルfCRを二次利用するセカンダリシステムからチャネルfBSを利用するプライマリシステムへの許容干渉量をIacceptableとする。また、プライマリシステムの所要受信電力をPreq(fBS)とする。これらパラメータの間には、次のような式が成立する。
【0042】
【数3】
【0043】
なお、保護比率がデシベル表記である場合には、上記式(3)の代わりに、次のような式が用いられ得る。
【0044】
【数4】
【0045】
式(2)における損失成分Hは、例えば、近傍チャネルの選択性(selectivity)及び漏洩率(leakage ratio)に依存する。なお、これら利得成分及び損失成分の詳細については、例えば“Technical and operational requirements for the possible operation of cognitive radio systems in the "white spaces" of the frequency band 470-790 MHz”(ECC Report 159, 2010)を参照されたい。
【0046】
<3.セカンダリシステムマネージャの構成例>
図5は、図3に例示した通信制御装置100(即ち、セカンダリシステムマネージャ)の構成の一例を示すブロック図である。図5を参照すると、通信制御装置100は、通信部110、記憶部120及び制御部130を備える。制御部130は、電力配分部140及び通知部150を含む。
【0047】
[3−1.各部の説明]
(1)通信部
通信部110は、通信制御装置100によるデータサーバ30及びマスタノード200との間の通信のための通信インタフェースである。通信制御装置100とデータサーバ30及びマスタノード200との間の通信は、それぞれ、有線通信若しくは無線通信又はそれらの組合せのいずれにより実現されてもよい。
【0048】
(2)記憶部
記憶部120は、ハードディスク又は半導体メモリなどの記憶媒体を用いて、通信制御装置100の動作のためのプログラム及びデータを記憶する。例えば、記憶部120は、データサーバ30から受信されるプライマリシステムに関する情報、及び各セカンダリシステムのマスタノード200から受信されるセカンダリシステムに関する情報を記憶する。本実施形態において、記憶部120は、電力配分部140及び通知部150により参照され又は更新されるセカンダリシステム管理テーブル122を有する。セカンダリシステム管理テーブル122の構成の一例について、後に具体的に説明する。
【0049】
(3)電力配分部
電力配分部140は、プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する。プライマリシステムのために保護される周波数チャネルとは、プライマリシステムに割当てられた周波数チャネル及びその近傍の周波数チャネルを含み得る。本明細書において、電力配分部140による電力配分計算の結果としてセカンダリシステムごとに算出される第1の送信電力を、許容送信電力という。一方、後に説明する通知部150は、電力配分部140により配分された許容送信電力の値に応じて決定される第2の送信電力の値を、所定の通知条件が満たされる場合に各セカンダリシステムに通知する。本明細書において、このように各セカンダリシステムに通知される第2の送信電力を、割当て送信電力という。以下、電力配分部140により実行され得る電力配分処理の3つの例を説明する。
【0050】
(3−1)第1の例
図6Aは、電力配分部140による電力配分処理の流れの第1の例を示すフローチャートである。第1の例において、電力配分部140は、周波数チャネルごとに当該周波数チャネルを二次利用するセカンダリシステムに送信電力を暫定的に配分した後、異なる周波数チャネル間の影響を考慮して、暫定的に配分した送信電力を再配分する。そして、電力配分部140は、配分後又は再配分後の送信電力を、上述した干渉制御モデルにおける式(2)を充足するように修正する。
【0051】
図6Aを参照すると、まず、電力配分部140は、データサーバ30から提供されたプライマリシステムに関する情報を、記憶部120から取得する(ステップS101)。また、電力配分部140は、マスタノード200から収集されたセカンダリシステムに関する情報を、記憶部120から取得する(ステップS102)。次に、電力配分部140は、セカンダリシステムにより利用される周波数チャネルごとに、ステップS103の処理を繰り返す。
【0052】
ステップS103において、電力配分部140は、ある1つの注目チャネルを利用するセカンダリシステム間で、送信電力を暫定的に配分する(ステップS103)。送信電力の暫定的な配分は、例えば、以下に説明する固定マージン方式、均等方式及び不均等方式の3種類の方式のいずれかに従って行われてよい。
【0053】
(固定マージン方式)
第1の方式は、固定マージン方式である。固定マージン方式の場合、予め固定的に設定される配分マージンMI(及びセーフティマージンSM)を用いて、各セカンダリシステムに配分される送信電力が簡易に算出される。この場合、送信電力の配分のための計算コストが小さくなる。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0054】
【数5】
【0055】
(均等方式)
第2の方式は、均等方式である。均等方式の場合、各セカンダリシステムに配分される送信電力は互いに等しくなる。即ち、複数のセカンダリシステムに公平に送信電力が配分される。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0056】
【数6】
【0057】
(不均等方式)
第3の方式は、不均等方式である。不均等方式の場合、プライマリシステムとの間の距離が大きいセカンダリシステムほど多くの送信電力が配分される。それにより、全体として二次利用の機会をより高めることができる。周波数チャネルfjを利用するk番目のセカンダリシステムに暫定的に配分される送信電力P(fj,k)は、次式により導かれる。
【0058】
【数7】
【0059】
また、均等方式及び不均等方式は、次に説明する与干渉マージン低減方式と組合せられてもよい。
【0060】
(与干渉マージン低減方式)
与干渉マージン低減方式は、干渉のリスクを低減するためのセーフティマージンSMを算入する方式であり、上述した均等方式又は不均等方式と組合せて用いられ得る。送信電力P(fj,k)は、均等方式との組合せについては次の式(8)、不均等方式との組合せについては次の式(9)により導かれる。なお、SMは、予め設定され又はマスタノード200から通知されるセーフティマージンを表す。
【0061】
【数8】
【0062】
さらに、上述した各方式は、次に説明する重み付け配分方式と組合せられてもよい。
【0063】
(重み付け配分方式)
重み付け配分方式は、セカンダリシステムごとの優先度に応じて送信電力の配分を重み付けする方式である。送信電力P(fj,k)は、均等方式との組合せについては次の式(10)、不均等方式との組合せについては次の式(11)により導かれる。また、送信電力P(fj,k)は、均等方式及び与干渉マージン低減方式との組合せについては次の式(10´)、不均等方式及び与干渉マージン低減方式との組合せについては次の式(11´)により導かれる。なお、wkは、優先度に応じた重みを表す。なお、セカンダリシステムごとの重みwkの代わりに、周波数チャネルごとの重みwjが用いられてもよい。
【0064】
【数9】
【0065】
なお、プライマリシステムにおいて周波数チャネルfjjの許容干渉量Iacceptable(i,fjj)のみが定義され、近傍の周波数チャネルfjの許容干渉量が定義されないケースがあり得る。例えば、周波数チャネルfjjがプライマリシステムに割当てられたチャネルであり、その近傍チャネルfjはプライマリシステムにより利用されないものの保護されるチャネルである場合には、そのようなケースが生じ得る。その場合、近傍チャネルfjを二次利用するセカンダリシステムに送信電力を配分するための配分式は、上述した各配分式において、許容干渉量Iacceptable(i,fj)をIacceptable(i,fjj)に置き換えると共に、経路損失及び利得成分の項L(i,fj,k)・G(fj,k)を損失成分を算入する項L(i,fj,k)・G(fj,k)/H(fjj,fj,k)に置き換えることで導かれる。一例として、固定マージン方式の配分式は次のように変形され得る。
【0066】
【数10】
【0067】
セカンダリシステムにより利用される全ての周波数チャネルについてステップS103の処理を終了すると、電力配分部140は、さらにチャネル間の干渉を算入して、セカンダリシステム間で送信電力を再配分する(ステップS104)。例えば、均等方式における送信電力の再配分は、次の式(12)(与干渉マージン低減方式との組合せの場合には式(12´))に従って行われ得る。
【0068】
【数11】
【0069】
式(12)は、プライマリシステムの許容干渉量から近傍チャネルの利用に起因する干渉量を差し引いた後に残る許容干渉量が残りのセカンダリシステム間で再配分されることを意味する。同様に、不均等方式における送信電力の再配分は、次の式(13)(与干渉マージン低減方式との組合せの場合には式(13´))に従って行われ得る。
【0070】
【数12】
【0071】
なお、当然ながら、再配分のための上述した各数式に、重み付け配分方式における重みがさらに適用されてもよい。
【0072】
次に、電力配分部140は、再配分後の送信電力に基づいて評価される干渉量が最も厳しい地点を、プライマリシステムのサービスエリア内で探索する(ステップS105)。例えば、干渉量が最も厳しい地点i´は、次の式(14)又は式(14´)のように探索される。
【0073】
【数13】
【0074】
次に、電力配分部140は、地点i´での総干渉量と許容干渉量Iacceptable(i,fj)とに基づいて、電力配分の修正係数Δを次式のように計算する(ステップS106)。
【0075】
【数14】
【0076】
なお、上記式(15´)は、電力配分に際して与干渉マージン低減方式が適用される場合に使用され得る。
【0077】
そして、電力配分部140は、算出した修正係数Δを用いて送信電力を次式に従って修正し、セカンダリシステムkの許容送信電力P´´(fj,k)を導出する(ステップS107)。
【0078】
【数15】
【0079】
なお、異なる周波数チャネル間の影響を考慮しない場合には、上述した送信電力の再配分(図6AのステップS104)は省略されてもよい。その場合、式(13)〜式(16)において、送信電力P´(fj,k)及びP´(fjj,kk)の代わりに、送信電力P(fj,k)及びP(fjj,kk)がそれぞれ用いられ得る。
【0080】
(3−2)第2の例
図6Bは、電力配分部140による電力配分処理の流れの第2の例を示すフローチャートである。第2の例において、電力配分部140は、第1の例と同様、周波数チャネルごとに当該周波数チャネルを二次利用するセカンダリシステムに送信電力を暫定的に配分した後、異なる周波数チャネル間の影響を考慮して、暫定的に配分した送信電力を再配分する。但し、第2の例においては、電力配分部140は、暫定的に配分した送信電力を、例えばセカンダリシステムごと又は周波数チャネルごとの優先度に応じて、段階的に確定させていく。
【0081】
図6Bの例において、電力配分部140は、まず、第1の例と同様にして、セカンダリシステムにより利用される全ての周波数チャネルについて、チャネルごとに送信電力を暫定的に配分する(ステップS101〜ステップS103)。次に、電力配分部140は、暫定的に配分された送信電力が上述した干渉制御モデルにおける式(2)を充足するか否かを判定する(ステップS109)。ここで、式(2)が充足されない場合には、処理はステップS110へ進む。
【0082】
ステップS110では、電力配分部140は、電力配分が未確定のセカンダリシステムのうち、より優先度の高いセカンダリシステムの電力配分を確定させる(ステップS110)。例えば、電力配分部140は、より優先度の高いセカンダリシステムに暫定的に配分された送信電力を、そのまま当該セカンダリシステムの許容送信電力として確定してもよい。その代わりに、電力配分部140は、例えば、暫定的に配分された送信電力に優先度に応じた重みを乗算して得た値を、当該セカンダリシステムの許容送信電力として確定してもよい。
【0083】
次に、電力配分部140は、チャネル間の干渉を算入して、電力配分が未確定の残りのセカンダリシステムに送信電力を再配分する(ステップS111)。ここでの再配分の計算式は、上述した式(12)又は式(13)などと同様であってよい。
【0084】
その後、ステップS109において式(2)が充足される場合には、電力配分部140は、全てのセカンダリシステムについて、暫定的に配分された送信電力又は再配分された送信電力を許容送信電力として確定する(ステップS112)。
【0085】
(3−3)第3の例
電力配分処理の第3の例では、電力配分部140は、第1の例及び第2の例と異なり、周波数チャネルごとに送信電力を暫定的に配分するステップを経ることなく、送信電力の割当てを決定する。
【0086】
まず、式(2)の左辺と右辺との差をDjとすると、式(2)を次のように表すことができる。
【0087】
【数16】
【0088】
ここで、各周波数チャネルについての許容干渉量Iacceptable(i,fj)(j=1,…,Oj)が与えられるものと仮定する。また、Mj+Njj個のセカンダリシステムの各々に割当てられる送信電力をPs(s=1,…,Mj+Njj)とする。すると、式(17)を拡張することにより、Oj次元の許容干渉量ベクトルとMj+Njj次元の送信電力ベクトルとの間に、次の関係式が成立する。
【0089】
【数17】
【0090】
式(18)に現れる、j番目の周波数チャネルについてのs番目のセカンダリシステムの送信電力Psにかかる係数as,jは、上述した干渉制御モデルにおける経路損失L、利得成分G及び損失成分Hに基づいて算出され得る。従って、電力配分部140は、式(18)の係数行列を算出した後、式(18)の解を導出することにより、送信電力ベクトル(P1,…,PMj+Njj)を算出することができる。
【0091】
許容干渉量ベクトルをIacceptable、送信電力ベクトルをPv、係数行列をAとする。すると、式(18)は次のように表される。なお、マージンに相当するベクトルDの要素は、固定値又はゼロであってもよい。
【0092】
【数18】
【0093】
例えば、セカンダリシステムの数Mj+Njjが周波数チャネルの数Ojと等しい場合には、電力配分部140は、正方行列となる係数行列Aの逆行列を用いて、次のように送信電力ベクトル(P1,…,PMj+Njj)を算出することができる。
【0094】
【数19】
【0095】
なお、セカンダリシステムの数Mj+Njjと周波数チャネルの数Ojとが等しくない場合には、電力配分部140は、送信電力ベクトルの複数の解から選択される1つの送信電力ベクトルを、各セカンダリシステムに割当てるべき送信電力の解として決定してもよい。また、式(18)の解は、近似的な解であってもよい。また、セカンダリシステムの数Mj+Njjの代わりに、次式の通りチャネルごとに考慮すべきセカンダリシステムの数を積算した数を、送信電力ベクトルの次元数として扱ってもよい。
【0096】
【数20】
【0097】
図6Cは、電力配分部140による電力配分処理の流れの第3の例を示すフローチャートである。
【0098】
図6Cを参照すると、まず、電力配分部140は、データサーバ30から提供されたプライマリシステムに関する情報を、記憶部120から取得する(ステップS101)。ここで取得される情報には、式(18)の許容干渉量ベクトルIacceptableが含まれる。また、電力配分部140は、マスタノード200から収集されたセカンダリシステムに関する情報を、記憶部120から取得する(ステップS102)。
【0099】
次に、電力配分部140は、上述した干渉制御モデルに従って、送信電力ベクトルPtxと許容干渉量ベクトルIacceptableとの間の関係式の係数行列Aを算出する(ステップS114)。それにより、式(18)のような送信電力ベクトルPtxと許容干渉量ベクトルIacceptableとの間の関係式が形成される。そして、電力配分部140は、形成された関係式を解くことにより、送信電力の配分を決定し、送信電力ベクトルの各要素を各セカンダリシステムの許容送信電力とする(ステップS115)。
【0100】
なお、ここで説明した3つの電力配分処理は例に過ぎない。即ち、電力配分部140により他の手法でセカンダリシステムに送信電力が配分されてもよい。また、図4では、新たなセカンダリシステムの出現(即ち、セカンダリシステム数の増加)に応じて送信電力が調整される例を示している。しかしながら、より一般的には、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含む様々なイベントに応じて、又は周期的に許容送信電力が更新され、次に説明する通知部150により所定の通知条件が判定されてよい。
【0101】
(4)通知部
通知部150は、電力配分部140により配分された許容送信電力の値に応じて、割当て送信電力の値を決定する。そして、通知部150は、所定の通知条件が満たされる場合に、決定した割当て送信電力の値を各セカンダリシステムに通知する。割当て送信電力の値は、典型的には、許容送信電力の値から所定のマージンを除くことにより決定されてよい。例えば、チャネルfjについてセカンダリシステムkに配分された許容送信電力の値をPtmp(fj,k)とすると、割当て送信電力の値Ptx(fj,k)は、マージンZを用いて次式のように決定され得る。
【0102】
【数21】
【0103】
マージンZの値は、固定値として予め通信制御装置100により記憶されていてもよく、又は例えば許容送信電力の値Ptmp若しくはその他のパラメータに応じて動的に決定されてもよい。また、チャネルごとに異なるマージンZの値が用いられてもよい。
【0104】
通知部150がセカンダリシステムに割当て送信電力の値を新たに通知するための通知条件は、当該セカンダリシステムについての割当て送信電力の前回通知された値と新たに配分された許容送信電力の値とを用いて表され得る。あるセカンダリシステムについて、割当て送信電力の前回通知された値をPtx,prev、新たに配分された許容送信電力の値をPtmp,new、Ptmp,newから式(22)に従って決定される新たな割当て送信電力の値をPtx,newとする。すると、通知条件は、次式で表され得る。
【0105】
【数22】
【0106】
式(23)は、割当て送信電力の前回通知された値Ptx,prevが新たに配分された許容送信電力の値Ptmp,newよりも大きいことを意味する。かかる不等式が満たされる場合、最新の状況に応じて計算される許容送信電力よりも大きい送信電力をセカンダリシステムが使用している。そこで、通知部150は、セカンダリシステムにより使用される送信電力を引き下げるために、新たな割当て送信電力の値Ptx,newをセカンダリシステムに通知する。
【0107】
式(24)は、新たに配分された許容送信電力の値Ptmp,newに応じて決定される割当て送信電力の新たな値Ptx,newから割当て送信電力の前回通知された値Ptx,prevを引いた差が所定の閾値Thtxよりも大きいことを意味する。かかる不等式が満たされる場合、セカンダリシステムが現在使用している送信電力を最新の状況に応じて計算される割当て送信電力にまで引き上げても、プライマリシステムに過剰な干渉が生じない。そこで、通知部150は、セカンダリシステムの送信電力を引き上げて通信機会を拡大するために、新たな割当て送信電力の値Ptx,newをセカンダリシステムに通知する。閾値Thtxは、固定値として予め通信制御装置100により記憶されていてもよく、又は例えば割当て送信電力の値Ptx,prev若しくはその他のパラメータに応じて動的に決定されてもよい。
【0108】
なお、通知部150は、新たに出現したセカンダリシステムには、上記通知条件の判定を行うことなく新たな割当て送信電力の値Ptx,newを通知してよい。
【0109】
式(22)に示したように、本実施形態においてセカンダリシステムに通知される割当て送信電力の値には、マージンZが算入されている。即ち、割当て送信電力の値は、許容送信電力の値から所定のマージンを除いた値である。従って、セカンダリシステム数の増減又はセカンダリシステムの移動などの状況の変化に応じて許容送信電力が低下し得る場合にも、許容送信電力がセカンダリシステムにより使用されている送信電力を下回るまでの猶予が残される。そして、許容送信電力がセカンダリシステムにより使用されている送信電力を下回らない限りは、当該セカンダリシステムの割当て送信電力は更新されない。また、許容送信電力が上昇し得る場合にも、その上昇幅があるレベル(上記閾値Thtxに対応するレベル)を上回るまで、セカンダリシステムの割当て送信電力は更新されない。従って、プライマリシステムへの過剰な干渉を回避しつつ、割当て送信電力の通知のためのシグナリングの増加が抑制される。
【0110】
典型的には、割当て送信電力の値は、所定の更新単位(例えば、1dBm又は5dBmなど)の整数倍で離散的に更新され得る。通知部150は、例えば、各セカンダリシステムに割当て送信電力の差分値をシグナリングすることにより、各セカンダリシステムに割当て送信電力の新たな値を通知してもよい。割当て送信電力の差分値dPtxは、次式により計算され得る。
【0111】
【数23】
【0112】
通知部150は、シグナリングのオーバヘッドを一層削減するために、上記所定の更新単位を用いて量子化された差分値をシグナリングし得る。更新単位をpunitとすると、dPtxは、次式のように量子化され得る。
【0113】
【数24】
【0114】
従って、通知部150から各セカンダリシステムへ送信される電力通知メッセージは、各セカンダリシステムのマスタノード200のアドレスに加えて、上記量子化された割当て送信電力の差分値dPtx,quantizedを含み得る。それにより、割当て送信電力の新たな値Ptx,newそのものが電力通知メッセージに含まれる場合と比較して、メッセージのビット長を削減することができる。
【0115】
通知部150は、上記通知条件の判定に加えて、プライマリシステムへの累積的な干渉量が許容干渉量に違反しないかを判定し、累積的な干渉量が許容干渉量に違反しない場合には割当て送信電力の新たな値をセカンダリシステムに通知しなくてもよい。
【0116】
プライマリシステムへの累積的な干渉量は、次式のように、1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づくプライマリシステムへの干渉量の総和Iest(i,fj)として推定され得る。なお、次式において、新たなセカンダリシステムについては割当て送信電力の新たな値Ptx,new、既存のセカンダリシステムについては割当て送信電力の前回通知された値Ptx,prevが送信電力値Ptxとして用いられる。
【0117】
【数25】
【0118】
割当て送信電力の新たな値のセカンダリシステムへの通知は、プライマリシステムへの干渉量の総和Iest(i,fj)が次式を満たす場合にのみ行われ得る。
【0119】
【数26】
【0120】
なお、式(28)において、Iacceptable(i,fj)は、基準点iにおけるチャネルfjについての許容干渉量を表す。このような追加的な判定により、割当て送信電力の通知のためのシグナリングの増加は、一層効果的に抑制される。
【0121】
図7は、本実施形態において記憶部120が有するセカンダリシステム管理テーブル122の構成の一例を示す説明図である。図7を参照すると、セカンダリシステム管理テーブル122は、「チャネル番号」、「システムID」、「許容送信電力」、「マージン量」、「割当て送信電力」及び「更新日時」という5つのデータ項目を有する。「チャネル番号」は、二次利用可能な各周波数チャネルを識別する番号である。「システムID」は、セカンダリシステムを一意に識別する識別子である。システムIDとして、セカンダリシステムのマスタノード200の装置IDが用いられてもよい。「許容送信電力」は、各セカンダリシステムに通知された割当て送信電力に対応する許容送信電力の値を示す。「マージン量」は、各セカンダリシステムに通知された割当て送信電力を決定する際に許容送信電力の値から除かれたマージンZの値を示す。「割当て送信電力」は、各セカンダリシステムに通知された割当て送信電力の値を示す。「更新日時」は、セカンダリシステム管理テーブル122の各レコードが更新された日時を示す。
【0122】
通知部150は、上述したような通知条件が満たされる場合に、割当て送信電力の値を各セカンダリシステムに通知し、セカンダリシステム管理テーブル122の「許容送信電力」、「マージン量」、「割当て送信電力」及び「更新日時」を更新する。そして、セカンダリシステム管理テーブル122内のこれらデータは、通知部150による次回の通知条件の判定の際に参照される。
【0123】
[3−2.処理の流れ]
次に、図8〜図11を用いて、本実施形態に係る通信制御装置100による処理の流れについて説明する。
【0124】
(1)電力調整処理
図8は、通信制御装置100による電力調整処理の流れの一例を示すフローチャートである。図8を参照すると、まず、図6A〜図6Cに例示したいずれかの手法に従って、電力配分部140により電力配分処理が行われる(ステップS100)。その後のステップS130〜S180の処理は、各セカンダリシステムについて繰り返される。
【0125】
ステップS130において、通知部130は、1つのセカンダリシステム(以下、対象システムという)に注目し、電力通知判定処理を行う(ステップS130)。ここでの電力通知判定処理の詳細な流れの一例について、後にさらに説明する。電力通知判定処理において、対象システムに割当て送信電力を通知しないと判定されると、その後の処理はスキップされる(ステップS140)。
【0126】
電力通知判定処理において、対象システムに割当て送信電力を通知すると判定されると、通知部130は、メッセージ生成処理を行い、対象システム宛ての電力通知メッセージを生成する(ステップS160)。そして、通知部130は、生成した電力通知メッセージを通信部110から対象システムへ送信する(ステップS170)。さらに、通知部130は、セカンダリシステム管理テーブル122に記憶されている対象システムの許容送信電力、マージン量及び割当て送信電力のデータを更新する(ステップS180)。
【0127】
これら処理が全てのセカンダリシステム(又は全てのアクティブなセカンダリシステム)について終了すると、図8に示した電力調整処理は終了する。
【0128】
(2)電力通知判定処理
図9Aは、図8のステップS130に相当する電力通知判定処理の詳細な流れの第1の例を示すフローチャートである。
【0129】
図9Aを参照すると、まず、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS131)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、通知部150は、対象システムに新たな割当て送信電力を通知すると判定する(ステップS136)。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS132へ進む。
【0130】
ステップS132において、通知部150は、対象システムに前回通知した割当て送信電力の値Ptx,prevをセカンダリシステム管理テーブル122から取得する(ステップS132)。そして、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,new及び前回通知された割当て送信電力の値Ptx,prevを用いて、上述した通知条件が満たされるかを判定する。例えば、Ptmp,new<Ptx,prevである場合には、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS133)。また、Ptx,prev+Thtx<Ptx,new=Ptmp,new−Zである場合にも、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS134)。上述した通知条件が満たされない場合には、処理はステップS137へ進む。
【0131】
処理がステップS136へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知すると判定する(ステップS136)。一方、処理がステップS137へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知しないと判定する(ステップS137)。
【0132】
図9Bは、図8のステップS130に相当する電力通知判定処理の詳細な流れの第2の例を示すフローチャートである。なお、ここでは、通信制御装置100が各セカンダリシステムにおいて出力可能な最大の送信電力値Ptx,maxを知っているものとする。
【0133】
図9Bを参照すると、まず、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS131)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、通知部150は、対象システムに新たな割当て送信電力を通知すると判定する(ステップS136)。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS132へ進む。
【0134】
ステップS132において、通知部150は、対象システムに前回通知した割当て送信電力の値Ptx,prevをセカンダリシステム管理テーブル122から取得する(ステップS132)。そして、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,new及び前回通知された割当て送信電力の値Ptx,prevを用いて、上述した通知条件が満たされるかを判定する。例えば、Ptmp,new<Ptx,prevである場合には、上述した通知条件が満たされるため、処理はステップS136へ進む(ステップS133)。また、Ptx,prev+Thtx<Ptx,newである場合にも、上述した通知条件が満たされる。但し、第2の例においては、通知部150は、Ptx,newを対象システムの最大送信電力値Ptx,maxとさらに比較する。そして、Ptx,newがPtx,max以下である場合にのみ、処理はステップS136へ進む(ステップS134)。一方、上述した通知条件が満たされない場合、又はPtx,newがPtx,maxを上回る場合には、処理はステップS137へ進む。
【0135】
処理がステップS136へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知すると判定する(ステップS136)。一方、処理がステップS137へ進むと、通知部135は、対象システムに新たな割当て送信電力の値を通知しないと判定する(ステップS137)。
【0136】
第2の例においては、対象システムにとって出力可能な範囲を超える過剰な送信電力の割当てが行われず、割当て送信電力を通知するためのシグナリングを一層削減することができる。通信制御装置100は、各セカンダリシステムの要求送信電力の最小値をも保持しておき、割当て送信電力が要求送信電力の当該最小値を下回る対象システムを、電力割当ての対象から除外してもよい。
【0137】
なお、図8に例示した電力調整処理のトリガとなるイベントは、典型的には、次の3種類のイベントEv1〜Ev3を含む。
Ev1)セカンダリシステム数の増加
Ev2)セカンダリシステム数の減少
Ev3)セカンダリシステムの移動
このうち、イベントEv1の場合には、既存のセカンダリシステムの割当て送信電力は通常増加しないことから、図9AのステップS134又は図9BのステップS134及びS135の判定は省略されてもよい。同様に、イベントEv2の場合には、既存のセカンダリシステムの許容送信電力は通常減少しないことから、図9A又は図9BのステップS133の判定は省略されてもよい。イベントEv2は、セカンダリシステムからの明示的な離脱の通知により認識されてもよく、又は事前に登録され得る周期で監視されるセカンダリシステムからの信号(ビーコンなど)の未受信により認識されてもよい。セカンダリシステムからの周期的な信号が受信されない場合には、さらに所定の待機時間の経過を待って、イベントEv2が発生したと判定されてもよい。それにより、セカンダリシステムのマスタノードの一時的な電源オフ又はスリープが生じた場合のセカンダリシステムの減少及び増加に起因する不要なシグナリングの発生を防ぐことができる。
【0138】
(3)メッセージ生成処理
図10は、図8のステップS160に相当するメッセージ生成処理の詳細な流れの一例を示すフローチャートである。
【0139】
図10を参照すると、まず、通知部150は、電力配分部140により対象システムに新たに配分された許容送信電力の値Ptmp,newからマージンZを除くことにより、新たな割当て送信電力の値Ptx,newを決定する(ステップS161)。
【0140】
次に、通知部150は、対象システムが新たに出現したセカンダリシステムであるかを判定する(ステップS162)。ここで、対象システムが新たに出現したセカンダリシステムである場合には、処理はステップS165へ進む。一方、対象システムが既存のセカンダリシステムである場合には、処理はステップS163へ進む。
【0141】
ステップS163において、通知部150は、割当て送信電力の差分値dPtx=Ptx,new−Ptx,prevを計算する(ステップS163)。さらに、通知部150は、計算された差分値dPtxを更新単位punitを用いて量子化する(ステップS164)。一方、ステップS165では、通知部150は、新たな割当て送信電力の値Ptx,newを更新単位punitを用いて量子化する(ステップS165)。
【0142】
そして、通知部150は、例えば量子化された割当て送信電力の値(既存のセカンダリシステムについては差分値)を示すフィールドを含み、対象システムのマスタノード200のアドレスを宛て先とする電力通知メッセージを生成する(ステップS166)。
【0143】
このように生成される電力通知メッセージが、図8のステップS170において、通信制御装置100から対象システムのマスタノード200へ送信され得る。
【0144】
(4)追加判定処理
図11は、上述した式(27)及び式(28)を用いた累積的な干渉量の判定のための判定処理の流れの一例を示すフローチャートである。かかる判定処理は、図8のステップS130の電力通知判定処理に加えて実行されてよい。
【0145】
図11を参照すると、まず、通知部150は、新たなセカンダリシステムについて新たに配分された割当て送信電力の値Ptx,newを取得する(ステップS151)。また、通知部150は、既存のセカンダリシステムに前回通知された割当て送信電力の値Ptx,prevを取得する(ステップS152)。次に、通知部150は、式(27)に従って、プライマリシステムへの干渉量の総和Iestを推定する(ステップS153)。そして、通知部150は、推定した干渉量の総和Iestがプライマリシステムの許容干渉量Iacceptableに違反するかを判定する(ステップS154)。ここで、推定した干渉量の総和Iestが許容干渉量Iacceptableに違反する場合には、通知部150は、新たな割当て送信電力の値を既存のシステムの各々へ通知すると判定する(ステップS155)。一方、推定した干渉量の総和Iestが許容干渉量Iacceptableに違反しない場合には、通知部150は、新たな割当て送信電力の値を既存のシステムには通知しないと判定する(ステップS156)。
【0146】
[3−3.プライマリシステムとセカンダリシステムとの間の距離]
上述した電力配分処理においては、セカンダリシステムごとの経路損失を導出するために、プライマリシステムと各セカンダリシステムとの間の距離を決定することが求められる。プライマリシステムと各セカンダリシステムとの間の距離は、例えば、以下に説明するいずれかの例に従って定義され得る。
【0147】
(1)第1の例
第1の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置からプライマリシステムのサービスエリアの外周までの最短距離である。
【0148】
例えば、図12Aには、プライマリシステムのサービスエリアの外周に相当する境界12と4つのセカンダリシステムとが示されている。第1、第2及び第3のセカンダリシステムは、プライマリシステムのサービスエリアの外部に位置する。第1、第2及び第3のセカンダリシステムからプライマリシステムのサービスエリアの外周までの最短距離は、それぞれd01、d02及びd03である。一方、第4のセカンダリシステムは、プライマリシステムのサービスエリアの内部に位置する。第4のセカンダリシステムについて経路損失を導出する際には、プライマリシステムとセカンダリシステムとの間の距離はゼロとみなされてもよい。その場合、経路損失は最大となる。その代わりに、第4のセカンダリシステムから境界12までの最短距離が、プライマリシステムと第4のセカンダリシステムとの間の距離として扱われてもよい。
【0149】
(2)第2の例
第2の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置からプライマリシステムのサービスエリアの外周上又は当該外周内の特定の1点までの距離である。特定の1点とは、例えば、ある1つのセカンダリシステムから最も近いプライマリシステムのサービスエリアの外周上の地点であってもよい。また、特定の1点とは、例えば、複数のセカンダリシステムからの距離の和が最小となる地点などであってもよい。この地点は、セカンダリシステムからの干渉を受けるプライマリシステムの仮想的な受信局が位置する地点であると考えられ得る。
【0150】
例えば、図12Bには、境界12と4つのセカンダリシステムとが再び示されている。第1、第2及び第3のセカンダリシステムは、プライマリシステムのサービスエリアの外部に位置する。ここで、第1のセカンダリシステムから最も近い境界12上の点をP1とする。第1、第2及び第3のセカンダリシステムとプライマリシステムとの間の距離は、第1、第2及び第3のセカンダリシステムのそれぞれの位置と点P1との間の距離d11、d12及びd13に相当する。一方、第4のセカンダリシステムは、プライマリシステムのサービスエリアの内部に位置する。第4のセカンダリシステムについて経路損失を取得する際には、第1の例と同様、プライマリシステムとセカンダリシステムとの間の距離はゼロとみなされてもよい。その代わりに、第4のセカンダリシステムと点P1との間の距離がプライマリシステムと第4のセカンダリシステムとの間の距離として扱われてもよい。
【0151】
図12Bにおいて、点P2は、境界12上で第1、第2及び第3のセカンダリシステムからの距離の和が最小となる点である。このような点P2が点P1の代わりに使用されてもよい。なお、例えば、セカンダリシステムの多くがプライマリシステムのガードエリアから離れた位置にある場合、プライマリ受信局が狭い地理的領域内にのみ存在することが既知である場合、又は特定の地点において許容干渉量が著しく厳しい場合などにおいては、予め決定される特定の地点が距離算出のための基準点として使用されてもよい。また、変調方式ごとに異なる複数の許容干渉量が規定されている場合には、距離だけではなく変調方式又は複数の許容干渉量を考慮して基準点が選択されてもよい。
【0152】
第1の例と第2の例とを比較すると、第1の例の場合には、距離の算出がより容易である一方で、経路損失の値が過剰に小さく見積もられる可能性がある。例えば、2つのセカンダリシステムがプライマリシステムを挟んで反対側に位置する場合に、そのような状況は生じ得る。その場合、セカンダリシステムに割当てられる送信電力は、より小さい値となる。従って、第1の例は、計算コストがより低く、干渉防止の観点でより安全な定義と言える。一方、第2の例では、経路損失の値が過剰に小さく見積もられる可能性が少ないため、二次利用の機会をより高めることができる。
【0153】
(3)第3の例
第3の例において、プライマリシステムと各セカンダリシステムとの間の距離は、各セカンダリシステムの位置から最も近傍のプライマリ受信局までの距離である。例えば、図12Cには、3つのセカンダリシステム及び3つのプライマリ受信局が示されている。第1のセカンダリシステムの最も近傍には、第1のプライマリ受信局が位置する。第1のセカンダリシステムと第1のプライマリ受信局との間の距離はd21である。第2のセカンダリシステムの最も近傍には、第2のプライマリ受信局が位置する。第2のセカンダリシステムと第2のプライマリ受信局との間の距離はd22である。第3のセカンダリシステムの最も近傍には、第3のプライマリ受信局が位置する。第3のセカンダリシステムと第3のプライマリ受信局との間の距離はd23である。従って、第1のセカンダリシステムとプライマリシステムとの間の距離としてd21、第2のセカンダリシステムとプライマリシステムとの間の距離としてd22、第3のセカンダリシステムとプライマリシステムとの間の距離としてd23がそれぞれ使用され得る。
【0154】
(4)第4の例
第4の例において、プライマリシステムと各セカンダリシステムとの間の距離は、全てのセカンダリシステムの位置からの距離の総和が最も小さいプライマリ受信局までの距離である。例えば、図12Dには、3つのセカンダリシステム及び3つのプライマリ受信局が再び示されている。このうち、3つのセカンダリシステムの位置からの距離の総和が最も小さいプライマリ受信局は、第2のプライマリ受信局である。第1のセカンダリシステムと第2のプライマリ受信局との間の距離はd31である。第2のセカンダリシステムと第2のプライマリ受信局との間の距離はd32である。第3のセカンダリシステムと第2のプライマリ受信局との間の距離はd33である。従って、第1のセカンダリシステムとプライマリシステムとの間の距離としてd31、第2のセカンダリシステムとプライマリシステムとの間の距離としてd32、第3のセカンダリシステムとプライマリシステムとの間の距離としてd33がそれぞれ使用され得る。
【0155】
第3及び第4の例の例においては、実際のプライマリ受信局の位置が距離の算出のための基準点となるため、より現実に即した干渉量の見積もりが可能となる。
【0156】
図12A〜図12Dの例では、プライマリシステムとセカンダリシステムとの間の距離の算出にあたって主にプライマリシステム側の基準点をどのように設定すべきかについて説明した。これに対し、セカンダリシステム側の基準点についても、様々な設定の手法が考えられる。例えば、セカンダリシステム側の基準点の位置は、単純にセカンダリシステムのマスタであるマスタノード200の位置であってもよい。その代わりに、セカンダリシステム側の基準点の位置は、セカンダリシステムのノード(マスタノード及びスレーブノード)のうちプライマリシステムのガードエリア又はいずれかのプライマリ受信局の最も近くのノードの位置であってもよい。また、計算が複雑になるものの、セカンダリシステムの複数のノードの位置を基準として複数の距離が算出され、当該複数の距離に応じて総合的な経路損失が計算されてもよい。これらセカンダリシステム側の基準点の設定の手法は、それぞれ、図12A〜図12Dに例示したどのプライマリシステム側の基準点の設定の手法と組み合わせられてもよい。
【0157】
また、例えば、セカンダリシステム側の基準点は、例えば、次のように段階的に設定されてもよい。まず、セカンダリシステム側の基準点を暫定的にセカンダリシステムのマスタであるマスタノード200とする。次に、マスタノード200から最も近くのプライマリシステムのサービスエリアの外周上の1点又は最も近くのプライマリ受信局の地点をプライマリシステム側の基準点とする。次に、プライマリシステム側の上記基準点に与える干渉を、セカンダリシステムのノード(マスタノード及びスレーブノード)の各々について見積もる。そして、プライマリシステム側の上記基準点に最大の干渉を与えるセカンダリシステム側のノードの位置を、セカンダリシステム側の最終的な基準点に設定する。セカンダリシステムのノードごとの干渉の見積もりに際しては、ノードの種類(マスタノード又はスレーブノードノード)に応じて異なる送信電力が考慮されてもよい。
【0158】
[3−4.チャネル間干渉の項の簡略化]
上述した電力配分部140による電力配分処理の第1の例において、チャネル間干渉を評価する項は、固定的な又は可変的なマージン量に置き換えられてもよい。チャネルfjにおけるマージン量をRint,jとすると、上述した式(13)〜式(15)は、次の式(29)〜式(31)のように変換され得る。
【0159】
【数27】
【0160】
上記式(29)〜式(31)は、各セカンダリシステムからプライマリシステムへのチャネル間干渉が各セカンダリシステムの経路損失に依存しない簡略化された手法で評価されることを意味する。マージン量Rint,jは、典型的には、チャネルfjの近傍チャネルを利用しているセカンダリシステム数に応じて設定され得る。例えば、次の式(32)の例では、マージン量Rint,jは近傍チャネルを利用しているセカンダリシステム数の合計に等しい。式(33)の例では、近傍チャネルからの損失成分Hに応じた重み付けが行われる。式(34)の例では、損失成分Hが重み係数γjjに置き換えられている(例えば、重み係数γjjはチャネル間の間隔が大きくなるにつれてより小さい値に設定され得る)。
【0161】
【数28】
【0162】
このようなチャネル間干渉項の置き換えの結果、あるチャネルを二次利用するセカンダリシステムの移動を原因として当該チャネルの近傍チャネルを二次利用するセカンダリシステムに配分される許容送信電力の値が変化しにくくなる。それにより、上述した通知条件が満たされる頻度が減少し、シグナリングの増加が抑制される。
【0163】
さらに、式(32)〜式(34)における各近傍チャネルのセカンダリシステム数Njjを実際の数から名目上の数N´jjに置き換える。各近傍チャネルの名目上のセカンダリシステム数N´jjは、例えば次の更新条件が満たされるまで更新されない。
【0164】
【数29】
【0165】
各近傍チャネルの実際のセカンダリシステム数Njj及び名目上のセカンダリシステム数N´jjが上記更新条件を満たしていると判定されると、名目上のセカンダリシステム数N´jjは、次のいずれかの式に従って更新され得る。なお、各式中のパラメータdN1、dN2及びdN3は、予め定義され得る追加パラメータである。
【0166】
【数30】
【0167】
各近傍チャネルの名目上のセカンダリシステム数N´jjの更新は、例えば図6AのフローチャートのステップS102の後に電力配分部140により行われてよい。このような名目上のセカンダリシステム数N´jjを導入することにより、チャネル間干渉を評価するためのマージン量Rint,jが、実際のセカンダリシステム数の変化に完全には追随せず、名目上のセカンダリシステム数N´jjの更新を待って変化することになる。従って、あるチャネルを二次利用するセカンダリシステム数の増減によって、当該チャネルの近傍チャネルを二次利用するセカンダリシステムに配分される許容送信電力の値が変化しにくくなる。結果として、上述した通知条件が満たされる頻度をさらに減少させることができる。
【0168】
<4.マスタノードの構成例>
図13は、上述した通信制御装置100により割当てられる送信電力を用いてセカンダリシステムを運用する通信装置であるマスタノード200の構成の一例を示すブロック図である。図13を参照すると、マスタノード200は、通信部210、制御部220、記憶部230及び無線通信部240を備える。
【0169】
通信部210は、マスタノード200によるデータサーバ30及び通信制御装置100との間の通信のための通信インタフェースとして動作する。通信部210は、制御部220による制御の下、例えば、二次利用の開始に際して、セカンダリシステムに関する情報をデータサーバ30に送信する。また、通信部210は、データサーバ30から通知される情報を受信する。また、通信部210は、通信制御装置100との間で、干渉制御の要求及び応答を送受信する。さらに、通信部210は、通信制御装置100から電力通知メッセージを受信し、受信したメッセージを制御部220へ出力する。
【0170】
制御部220は、マスタノード200の動作全般を制御する役割を有する。例えば、制御部220は、図4に例示したシーケンスに従って通信制御装置100と連携することで、セカンダリシステムの運用に際してのプライマリシステムへの干渉を抑制する。より具体的には、制御部220は、通信制御装置100から受信される電力通知メッセージにより示されている割当て送信電力の値を参照する。そして、制御部220は、割当て送信電力の範囲内の送信電力を、セカンダリシステムの運用のために無線通信部240に設定する。制御部220は、例えば、割当て送信電力をセカンダリシステムに参加するノードの間でさらに配分してもよい。
【0171】
記憶部230は、ハードディスク又は半導体メモリなどの記憶媒体を用いて、通信制御装置100との連携及びセカンダリシステムの運用のために使用されるプログラム及びデータを記憶する。
【0172】
無線通信部240は、マスタノード200と当該マスタノード200に接続するスレーブノードとの間の無線通信のための無線通信インタフェースとして動作する。無線通信部240は、例えば、IEEE802.22、IEEE802.11af又はECMA−392に従って、1つ以上のスレーブノードとの間で、無線信号を送受信する。無線通信部240により送信される無線信号の送信電力は、上述した割当て送信電力の範囲内で制御部220により制御され得る。
【0173】
<5.変形例>
本明細書では、セカンダリシステムの送信電力を調整するための様々な計算処理をセカンダリシステムマネージャとしての役割を有する通信制御装置100が行う例について主に説明した。図3に関連して説明したように、通信制御装置100は、データサーバ30又はいずれかのマスタノード200と物理的に同一の装置上に実装されてもよい。また、上述した計算処理の一部が、物理的に異なる装置上で行われてもよい。
【0174】
例えば、上述した干渉制御モデルに基づく比較的複雑な計算をする第1の装置とは別に、簡易なパラメータ計算を行う第2の装置が設けられてもよい。この場合、例えば、配分マージンMIの取得、セーフティマージンSMの取得、許容送信電力からの割当て送信電力の計算、又は割当て送信電力の差分値の計算及びその量子化などが、第2の装置により行われてよい。第2の装置は、配分マージンMIを固定値とする代わりに、例えば、セカンダリシステム数に依存する次のいずれかの計算式に従って配分マージンMIを計算してもよい。
【0175】
【数31】
【0176】
式(39)において、Npotential_max_interferersは、同時に干渉源となり得るセカンダリシステムの潜在的な最大数を表す。Npotential_max_interferersが2であればMIは約3.0[dB]、3であればMIは約4.8[dB]、4であればMIは約6.0[dB]となる。一方、式(40)において、Nactive_interferers(fWSD)は、チャネルfWSDを同時に二次利用するアクティブなセカンダリシステム数を表す。なお、次のように、MIの計算式にオフセット値dMIが加算されてもよい。
【0177】
【数32】
【0178】
<6.まとめ>
ここまで、図1〜図13を用いて本開示に係る技術の一実施形態について詳細に説明した。上述した実施形態によれば、プライマリシステムのために保護される周波数チャネルを二次利用するセカンダリシステムに送信電力を割当てる際、セカンダリシステム間で配分される許容送信電力に応じて決定される割当て送信電力が各セカンダリシステムに通知される。かかる通知は、送信電力の更新に際して、前回通知された割当て送信電力の値及び新たに配分された許容送信電力の値が所定の通知条件を満たす場合にのみ行われる。従って、セカンダリシステム数が変化し又はセカンダリシステムが移動した場合に、送信電力を通知するためのシグナリングは複数のセカンダリシステムにわたって必ずしも発生しない。よって、シグナリングの増加を抑制することができる。
【0179】
上記通知条件は、前回通知された割当て送信電力の値が新たに配分された許容送信電力の値よりも大きいという条件を含み得る。かかる構成によれば、プライマリシステムへの干渉量が許容干渉量を超える可能性がある場合には、新たな割当て送信電力の値がセカンダリシステムへ通知される。従って、複数のセカンダリシステムからの累積的な干渉がプライマリシステムに悪影響を与えることが適切に防止される。
【0180】
また、上記通知条件は、新たに決定される割当て送信電力の値から前回通知された割当て送信電力の値を引いた差が所定の閾値よりも大きいという条件を含み得る。かかる構成によれば、許容送信電力が上昇する場合に、その上昇幅が所定の閾値を上回るまで、セカンダリシステムの割当て送信電力は維持される。従って、シグナリングの増加の抑制と割当て送信電力の引き上げによる通信機会の拡大との間でバランスをとることができる。
【0181】
また、セカンダリシステムマネージャが二次利用のためのチャネルをセカンダリシステムに推奨することにより、将来的に発生する送信電力の調整において許容送信電力の値が大きく変化する可能性を低減し、シグナリングの増加を予防することも可能である。
【0182】
なお、本明細書において説明した各装置による一連の制御処理は、ソフトウェア、ハードウェア、及びソフトウェアとハードウェアとの組合せのいずれを用いて実現されてもよい。ソフトウェアを構成するプログラムは、例えば、各装置の内部又は外部に設けられる記憶媒体に予め格納される。そして、各プログラムは、例えば、実行時にRAM(Random Access Memory)に読み込まれ、CPU(Central Processing Unit)などのプロセッサにより実行される。
【0183】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0184】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、
を備え、
前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、
通信制御装置。
(2)
前記所定の条件は、前記第2の送信電力の前回通知された値が前記電力配分部により新たに配分された前記第1の送信電力の値よりも大きいという条件を含む、前記(1)に記載の通信制御装置。
(3)
前記所定の条件は、新たに配分された前記第1の送信電力の値に応じて決定される前記第2の送信電力の新たな値から前記第2の送信電力の前回通知された値を引いた差が所定の閾値よりも大きいという条件を含む、前記(1)又は前記(2)に記載の通信制御装置。
(4)
前記第2の送信電力の値は、前記第1の送信電力の値から所定のマージンを除くことにより決定される、前記(1)〜(3)のいずれか1項に記載の通信制御装置。
(5)
前記通知部は、既存のセカンダリシステムに配分された前記第2の送信電力の新たな値が当該セカンダリシステムにおいて出力可能な送信電力の最大値よりも大きい場合には、前記第2の送信電力の新たな値を当該セカンダリシステムに通知しない、前記(1)〜(4)のいずれか1項に記載の通信制御装置。
(6)
前記電力配分部は、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含むイベントに応じて又は周期的に、前記第1の送信電力の配分計算を実行する、前記(1)〜(5)のいずれか1項に記載の通信制御装置。
(7)
前記通知部は、送信電力の更新に際して、前記1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づく前記プライマリシステムへの干渉量の総和を前記プライマリシステムの許容干渉量とさらに比較し、前記干渉量の総和が前記許容干渉量に違反する場合にのみ、既存のセカンダリシステムに前記第2の送信電力の新たな値を通知する、前記(1)〜(6)のいずれか1項に記載の通信制御装置。
(8)
前記通知部は、各セカンダリシステムに前記第2の送信電力の前回の通知からの差分値をシグナリングすることにより、前記第2の送信電力の新たな値を通知する、前記(1)〜(7)のいずれか1項に記載の通信制御装置。
(9)
前記第2の送信電力の値は、所定の更新単位の整数倍で離散的に更新され、
前記通知部は、前記所定の更新単位を用いて量子化された前記差分値をシグナリングする、
前記(8)に記載の通信制御装置。
(10)
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を各セカンダリシステムの経路損失に依存しない簡略化された手法で評価することにより、前記1つ以上のセカンダリシステムに送信電力を配分する、前記(1)〜(9)のいずれか1項に記載の通信制御装置。
(11)
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を、各チャネルの実際のセカンダリシステム数に完全には追随しない名目上のセカンダリシステム数を用いて評価する、前記(10)に記載の通信制御装置。
(12)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、
を含み、
送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、
通信制御方法。
(13)
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、
を備える通信制御装置と、
前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、
を含み、
前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、
通信制御システム。
【符号の説明】
【0185】
1 通信制御システム
10 プライマリ送信局
20 プライマリ受信局
100 通信制御装置
140 電力配分部
150 通知部
200 セカンダリシステムのマスタノード
【特許請求の範囲】
【請求項1】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、
を備え、
前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、
通信制御装置。
【請求項2】
前記所定の条件は、前記第2の送信電力の前回通知された値が前記電力配分部により新たに配分された前記第1の送信電力の値よりも大きいという条件を含む、請求項1に記載の通信制御装置。
【請求項3】
前記所定の条件は、新たに配分された前記第1の送信電力の値に応じて決定される前記第2の送信電力の新たな値から前記第2の送信電力の前回通知された値を引いた差が所定の閾値よりも大きいという条件を含む、請求項1に記載の通信制御装置。
【請求項4】
前記第2の送信電力の値は、前記第1の送信電力の値から所定のマージンを除くことにより決定される、請求項1に記載の通信制御装置。
【請求項5】
前記通知部は、既存のセカンダリシステムに配分された前記第2の送信電力の新たな値が当該セカンダリシステムにおいて出力可能な送信電力の最大値よりも大きい場合には、前記第2の送信電力の新たな値を当該セカンダリシステムに通知しない、請求項1に記載の通信制御装置。
【請求項6】
前記電力配分部は、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含むイベントに応じて又は周期的に、前記第1の送信電力の配分計算を実行する、請求項1に記載の通信制御装置。
【請求項7】
前記通知部は、送信電力の更新に際して、前記1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づく前記プライマリシステムへの干渉量の総和を前記プライマリシステムの許容干渉量とさらに比較し、前記干渉量の総和が前記許容干渉量に違反する場合にのみ、既存のセカンダリシステムに前記第2の送信電力の新たな値を通知する、請求項1に記載の通信制御装置。
【請求項8】
前記通知部は、各セカンダリシステムに前記第2の送信電力の前回の通知からの差分値をシグナリングすることにより、前記第2の送信電力の新たな値を通知する、請求項1に記載の通信制御装置。
【請求項9】
前記第2の送信電力の値は、所定の更新単位の整数倍で離散的に更新され、
前記通知部は、前記所定の更新単位を用いて量子化された前記差分値をシグナリングする、
請求項8に記載の通信制御装置。
【請求項10】
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を各セカンダリシステムの経路損失に依存しない簡略化された手法で評価することにより、前記1つ以上のセカンダリシステムに送信電力を配分する、請求項1に記載の通信制御装置。
【請求項11】
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を、各チャネルの実際のセカンダリシステム数に完全には追随しない名目上のセカンダリシステム数を用いて評価する、請求項10に記載の通信制御装置。
【請求項12】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、
を含み、
送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、
通信制御方法。
【請求項13】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、
を備える通信制御装置と、
前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、
を含み、
前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、
通信制御システム。
【請求項1】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部と、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部と、
を備え、
前記通知部は、送信電力の更新に際して、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び前記電力配分部により新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を当該セカンダリシステムに通知する、
通信制御装置。
【請求項2】
前記所定の条件は、前記第2の送信電力の前回通知された値が前記電力配分部により新たに配分された前記第1の送信電力の値よりも大きいという条件を含む、請求項1に記載の通信制御装置。
【請求項3】
前記所定の条件は、新たに配分された前記第1の送信電力の値に応じて決定される前記第2の送信電力の新たな値から前記第2の送信電力の前回通知された値を引いた差が所定の閾値よりも大きいという条件を含む、請求項1に記載の通信制御装置。
【請求項4】
前記第2の送信電力の値は、前記第1の送信電力の値から所定のマージンを除くことにより決定される、請求項1に記載の通信制御装置。
【請求項5】
前記通知部は、既存のセカンダリシステムに配分された前記第2の送信電力の新たな値が当該セカンダリシステムにおいて出力可能な送信電力の最大値よりも大きい場合には、前記第2の送信電力の新たな値を当該セカンダリシステムに通知しない、請求項1に記載の通信制御装置。
【請求項6】
前記電力配分部は、セカンダリシステム数の変化若しくはセカンダリシステムの移動を含むイベントに応じて又は周期的に、前記第1の送信電力の配分計算を実行する、請求項1に記載の通信制御装置。
【請求項7】
前記通知部は、送信電力の更新に際して、前記1つ以上のセカンダリシステムにわたる割当て送信電力の値に基づく前記プライマリシステムへの干渉量の総和を前記プライマリシステムの許容干渉量とさらに比較し、前記干渉量の総和が前記許容干渉量に違反する場合にのみ、既存のセカンダリシステムに前記第2の送信電力の新たな値を通知する、請求項1に記載の通信制御装置。
【請求項8】
前記通知部は、各セカンダリシステムに前記第2の送信電力の前回の通知からの差分値をシグナリングすることにより、前記第2の送信電力の新たな値を通知する、請求項1に記載の通信制御装置。
【請求項9】
前記第2の送信電力の値は、所定の更新単位の整数倍で離散的に更新され、
前記通知部は、前記所定の更新単位を用いて量子化された前記差分値をシグナリングする、
請求項8に記載の通信制御装置。
【請求項10】
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を各セカンダリシステムの経路損失に依存しない簡略化された手法で評価することにより、前記1つ以上のセカンダリシステムに送信電力を配分する、請求項1に記載の通信制御装置。
【請求項11】
前記電力配分部は、各セカンダリシステムから前記プライマリシステムへのチャネル間干渉を、各チャネルの実際のセカンダリシステム数に完全には追随しない名目上のセカンダリシステム数を用いて評価する、請求項10に記載の通信制御装置。
【請求項12】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分することと、
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知することと、
を含み、
送信電力の更新に際しては、あるセカンダリシステムについて前記第2の送信電力の前回通知された値及び新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値が当該セカンダリシステムに通知される、
通信制御方法。
【請求項13】
プライマリシステムのために保護される周波数チャネルの二次利用のために許容される送信電力を1つ以上のセカンダリシステムに配分する電力配分部、及び
各セカンダリシステムについて、前記電力配分部により配分された第1の送信電力の値に応じて決定される第2の送信電力の値を通知する通知部、
を備える通信制御装置と、
前記通信制御装置から通知される前記第2の送信電力の値の範囲内でセカンダリシステムを運用するための送信電力を設定する通信装置と、
を含み、
前記通信制御装置の前記通知部は、送信電力の更新に際して、前記通信装置に前回通知した前記第2の送信電力の値及び前記通信装置に新たに配分された前記第1の送信電力の値が所定の条件を満たす場合にのみ、前記第2の送信電力の新たな値を前記通信装置に通知する、
通信制御システム。
【図1】

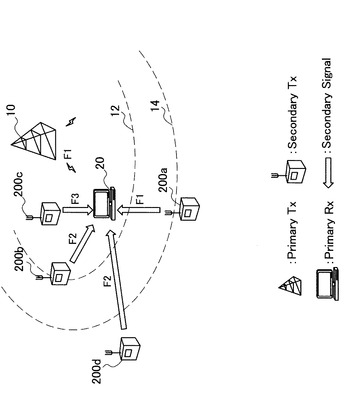
【図2】

【図3】

【図4】
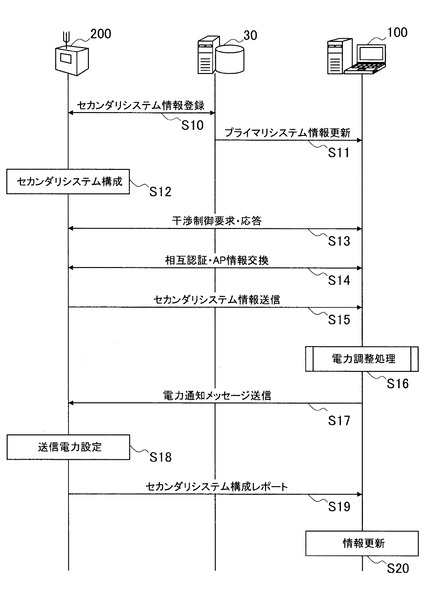
【図5】
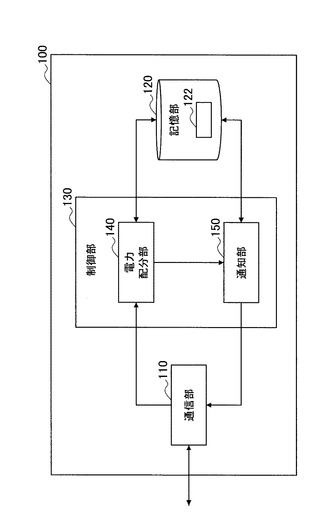
【図6A】
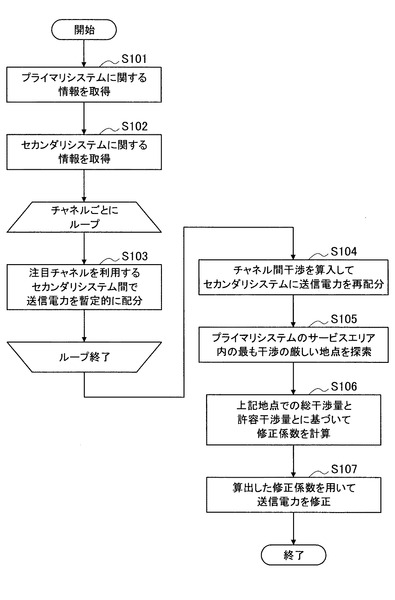
【図6B】
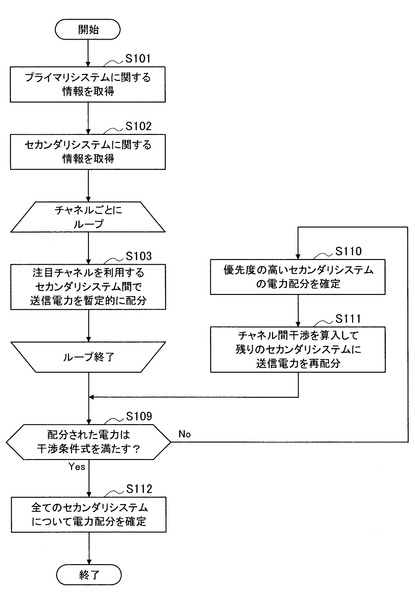
【図6C】
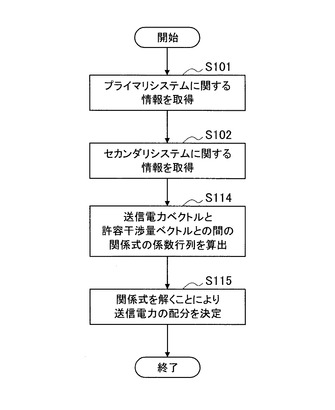
【図7】
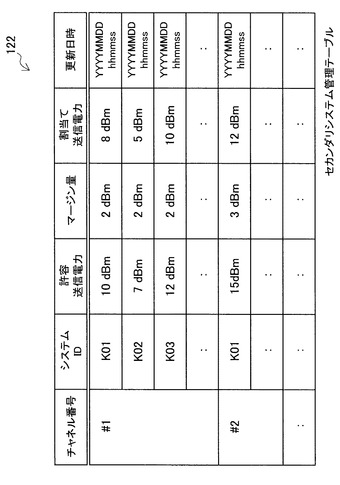
【図8】

【図9A】

【図9B】

【図10】
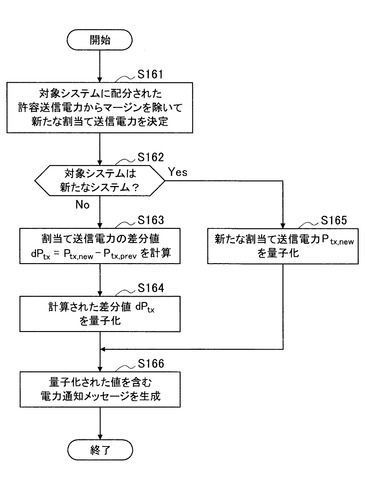
【図11】
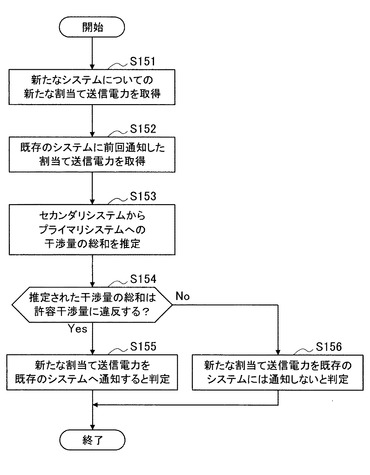
【図12A】
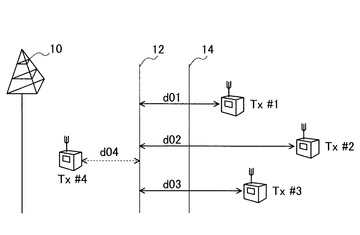
【図12B】
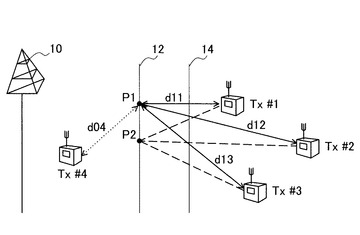
【図12C】
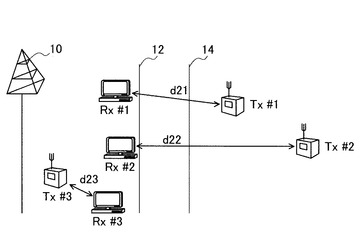
【図12D】
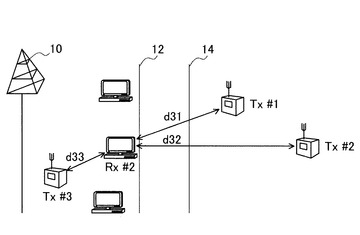
【図13】
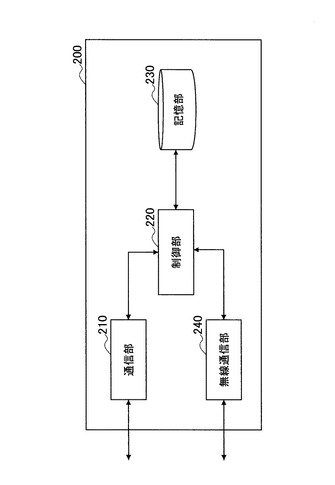
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【図12A】
【図12B】
【図12C】
【図12D】
【図13】
【公開番号】特開2013−78096(P2013−78096A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−252428(P2011−252428)
【出願日】平成23年11月18日(2011.11.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]