
通信測距複合システム、通信測距装置、親機および子機
【課題】通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム等を提供する。
【解決手段】通信測距複合システムでは、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間Ts)を算出する。よって、制御フレームの送信及び受信タイミングを精確に検出する必要がなく、第1の送信時間αや第2の送信時間βにズレが生じても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
【解決手段】通信測距複合システムでは、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間Ts)を算出する。よって、制御フレームの送信及び受信タイミングを精確に検出する必要がなく、第1の送信時間αや第2の送信時間βにズレが生じても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、短距離無線通信によって情報を送受信すると共に通信機間の距離を測定する通信測距複合システム、通信測距装置、親機および子機に関する。
【背景技術】
【0002】
従来、情報通信技術を用いて人と道路と車両との間で情報を授受することにより、交通事故の防止や渋滞の緩和等を図る交通システムの実用化に向けた検討が行われている。そして、このような情報授受システムでは、その目的や用途に応じて各種の無線通信方式が採用されている。
【0003】
例えば、情報授受システムでは、車載器によって取得したGPS情報を車車間通信によって互いの車両が交換することによって、互いの位置を把握し、車両と車両とが衝突する事故を防止する仕組みがなされている。但し、歩行者等が携帯するような端末については、車載器のような高精度のGPS情報を得られないことが多い。
【0004】
一方、二つの通信機間で互いに信号を送受信する際の伝播遅延時間に基づいて、通信機間距離を測定する二方向測距(TWR;Two Way Ranging)が知られている。そして、このTWRにおいて、通信機間で互いに送受信する信号(搬送波)に情報をのせることにより、効率よく情報の授受と通信機間の距離とを測定する通信測距複合システムが提案されている。これにより、GPS情報の精度に依存することなく、互いの位置を把握することが期待される。
【0005】
具体的には、通信測距複合システムでは、情報(第1フレーム)の発信源である通信機を親機、親機に情報(第2フレーム)を返信する通信機を子機として、親機が第1フレームの送信終了時点から第2フレームの受信終了時点までの時間T1を計時し、子機が第1フレームの受信終了時点から第2フレームの送信終了時点までの時間T2を計時する。そして、これら時間T1またはT2を示す情報を受信した通信機(親機または子機)が、時間T1とT2との差分を伝播遅延時間として、この伝播遅延時間に係数(c/2;但し、cは光速)を乗じることにより通信機間距離を算出している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−232828号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、従来の通信測距複合システムでは、搬送波の変調方式によっては通信波形が複雑になるため、第1または第2フレーム(通信フレームと総称する)の受信終了タイミングの検出が複雑になり、このことが測距精度に影響を与える可能性があった。一方で、測距精度の向上を図ろうとして通信波形を単純化すると、例えばOFDM(Orthogonal Frequency Division Multiplexing)のようなマルチパスの影響を受けにくい変調方式を採用し難くなり、情報の伝達確度の低下に繋がりかねないという問題があった。
【0008】
本発明は、上記問題点を解決するために、通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム、通信測距装置、親機および子機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた第1発明である通信測距複合システムは、短距離無線通信を行う複数の通信機のうち、情報発信源である通信機を親機、この親機に情報を返信する通信機を子機として、互いに情報を送受信する際の伝播遅延時間により、親機と子機との距離である通信機間距離を測定するシステムである。
【0010】
本発明では、このような通信測距複合システムにおいて、親機から発信される情報を表す通信フレームを第1の通信フレーム、子機から親機に返信される情報を表す通信フレームを第2の通信フレームとして、親機が、第1の通信フレームの送信終了後に矩形波のパルス信号(第1のパルス信号)を子機に送信する。そして、子機が、親機から第1の通信フレームと第1のパルス信号とを受信すると、第2の通信フレームの返信前に、第1の通信フレームの受信終了後に矩形波のパルス信号(第2のパルス信号)を親機に送信する。
【0011】
次に、子機が、親機に第2のパルス信号を送信すると、第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間としての応答時間Tsを算出し、親機が、子機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間としての待機時間Tmを算出する。
【0012】
最後に、親機および子機の少なくとも一方が、待機時間Tmと応答時間Tsとの差分を伝播遅延時間として、例えばこの伝播遅延時間に係数(c/2;但し、cは光速)を乗じることにより、通信機間距離を測定する。
【0013】
したがって、本発明の通信測距複合システムによれば、第1の通信フレームの送受信と第2の通信フレームの送受信との間の時間を利用して、パルス信号の送受信を行うことにより、効率よく情報の伝達と測距とを行うことができる。また、情報の伝達と測距とをそれぞれに適した別々の通信波形を用いて行うとともに、パルス信号が矩形波であるためエッジを検出することが容易であることから、ひいては、通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0014】
なお、本発明では、親機および子機の少なくとも一方が通信機間距離を測定すればよいが、親機が行う場合には次のような構成によって、効率性をさらに上げることができる。
すなわち、第2の通信フレームには、子機による算出結果としての応答時間Tsを示す情報が含まれており、親機が、子機から第2の通信フレームを受信すると、当該親機による算出結果としての待機時間Tmとその応答時間Tsとの差分を算出することにより、通信機間距離を測定する。これにより、通信フレームの送受信回数をむやみに増加させずに済むので、ひいてはより効率的に情報の伝達と測距とを行うことができる。
【0015】
また、本発明では、親機および子機が、通信フレームとパルス信号とについて、同一の通信チャンネルを用いて(即ち、同一の周波数と同一の帯域幅にて)送受信することにより、周波数資源を節約でき、且つ、他システムへの干渉を防止することができる。さらに言うと、通信チャンネルを切り替えるための装置構成や処理を省略できるので、簡易且つより効率的に情報の伝達と測距とを行うことができる。
【0016】
なお、本発明では、第1の通信フレームの送受信と第2の通信フレームの送受信との間の時間内に、パルス信号の送受信を一回行うように構成してもよいが、複数回行うことにより、測距精度をさらに向上させることができる。
【0017】
すなわち、親機および子機の少なくとも一方が、予め規定された測距用通信回数だけパルス信号を連続的に送信すると共に、子機が、親機から第1のパルス信号を受信する毎に応答時間Tmを算出し、親機が、子機から第2のパルス信号を受信する毎に待機時間Tsを算出する。そして、親機および子機の少なくとも一方が、測距用通信回数に対応する複数の伝播遅延時間を平均化することによって、通信機間距離を測定する。これにより、パルス信号のエッジ検出に伴う誤差(つまり、受信タイミングの検出誤差)を縮小することが可能となり、ひいては測距精度をより向上させることができる。
【0018】
また、本発明では、親機および子機の少なくとも一方が、パルス信号の受信毎にその受信電力を検出すると共に、その検出結果に基づく重みを用いて複数の伝播遅延時間の加重平均を算出することにより、通信機間距離を測定してもよい。この構成によれば、単純に複数の伝播遅延時間を平均化する場合と比較して、パルス信号のエッジ検出に対する確からしさ(尤度)が上記の算出結果に反映される分、測距精度をより向上させることができる。
【0019】
なお、補足すると、既存の通信機では、通信フレームの受信電力(RSSI)を得られるものも多い。本発明では、通信フレームの直後にパルスを生成するため、通信フレームのRSSIとパルス信号のRSSIには高い相関がある。パルスを用いた測距の場合、SNR(Signal to Noise Ratio:信号対雑音強度比)は、時間的なパルスのブレ、いわゆるジッタと1対1の関係になる(非特許文献:「タイミングジッタの要因となるランダムノイズ」MAXIMアプリケーションノート,APP3631,02 Sep. 2005参照)。ジッタは測距誤差となるため、SNR値を推定することができるRSSIは、測距精度を知るためのパラメータとなる。
【0020】
パルスを用いた測距では、SNRを向上させるために、測距を繰り返し行って、その平均値をとる方法がよく用いられるが、その平均化回数は、所望SNRで決まる。RSSIによってSNRが推定できれば、所望SNRを得るために必要な平均化回数を求めることができる。このように、必要な平均化回数を求めることができれば、必要最低限の時間(ひいては測距回数)で最適な測距値を得ることができる。
【0021】
ところで、本発明では、第1の通信フレームがデータフレームであり、第2の通信フレームには、そのデータフレームの受信毎に子機から親機に返信するように予め規定された確認応答を示すACK情報(ACK;Acknowledgment)が含まれている構成であってもよい。
【0022】
また、本発明では、第1の通信フレームが、親機から子機へのデータ送信前の確認要求を示すRTSフレーム(RTS;Request To Send)であり、第2の通信フレームには、そのRTSフレームの受信毎にデータ受信が可能であれば子機から親機に返信するように予め規定された確認応答を示すCTSフレーム(CTS;Clear To Send)が含まれている構成であってもよい。
【0023】
前者および後者の場合ともに、短距離無線通信を行うための通信プロトコルに変更を加えることなく、パルス信号を送受信することが可能であり、ひいては既存の通信プロトコルを損なうことなく、情報の伝達と測距とを効率的かつ精度よく行うことができる。
【0024】
また、上記目的を達成するためになされた第2発明である通信測距装置は、短距離無線通信を行う装置であって、通信相手の通信機との間で互いに情報を送受信する際の伝播遅延時間により、その通信機と当該装置との距離である通信機間距離を測定する。
【0025】
具体的には、本発明の通信測距装置では、当該装置が情報発信源として他の通信機に送信する通信フレームを第1の通信フレーム、第1の通信フレームの送信元である他の通信機に当該装置が返信する通信フレームを第2の通信フレームとして、無線通信手段が、第1及び第2の通信フレームを送受信すると共に、このうち、第1の通信フレームの送信後に第1のトリガ信号、第1の通信フレームの受信後に第2のトリガ信号をそれぞれ出力する。
【0026】
そして、信号制御部が、無線通信手段から第1のトリガ信号を入力すると、予め設定された送信時間α後に矩形波のパルス信号(第1のパルス信号)を送信すると共に、無線通信手段から第2のトリガ信号を入力すると、第1の送信時間αよりも予め長く設定された第2の送信時間β後に矩形波のパルス信号(第2のパルス信号)を送信する。
【0027】
さらに、時間算出部が、通信機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミング(信号制御部による送信タイミング)からその第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出すると共に、通信機から第1のパルス信号を受信すると、その第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミング(信号制御部による送信タイミング)までの時間(応答時間Ts)を算出する。
【0028】
そして、距離測定手段が、通信機から応答時間Tsを示す情報を受信すると、時間算出部にて算出した待機時間Tmとその応答時間Tsとの差分を伝播遅延時間とし、通信機から待機時間Tmを示す情報を受信すると、その待機時間Tmと時間算出部にて算出した応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0029】
このように構成された通信測距装置では、通信フレームの同期信号をトリガとして、決められたパルスを出力するだけでTWRによる測距が行われることになる。補足すると、無線通信では、同期処理は難しい技術の一つであり、その回路も複雑なものになるが、本発明によれば、測距パルスの同期は、通信機が行っていることになるので、測距回路は簡単なものとなる。
【0030】
また、本発明の通信測距装置では、第1発明の通信測距複合システムにおける親機としての機能と子機としての機能とを有しているので、このシステムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0031】
また、本発明の通信測距装置では、自動利得制御(AGC:Automatic Gain Control)手段が、パルス信号の受信前にそのパルス信号と同一の振幅を有するサンプル信号を受信すると、そのサンプル信号に基づいて自動利得調整を行う。但し、信号制御部が、パルス信号の送信前に上記のサンプル信号を送信するように構成されている。そして、時間算出部が、予め設定された電力閾値を上回る受信電力を検出したタイミングをパルス信号の受信タイミングとして、待機時間Tmおよび応答時間Tsを算出する。
【0032】
このように構成された通信測距装置によれば、パルス信号の受信電力によらず、パルス信号のエッジ検出タイミングの尤度を高めることができ、ひいては測距精度をより向上させることができる。
【0033】
さらに、本発明の通信測距装置では、無線通信手段と距離測定手段とを少なくとも有するユニットを無線通信ユニット、信号制御部と時間算出部とを少なくとも有するユニットを測距ユニットとして、短距離無線通信を行うアンテナと、そのアンテナの接続先を無線通信ユニットと測距ユニットとのいずれか一方に切り替えるための切替部とを備える。そして、信号制御部が、無線通信手段からトリガ信号(第1又は第2のトリガ信号)を入力すると、切替部を介してアンテナの接続先を無線通信ユニットから測距ユニットに切り替えるように構成してもよい。また、送信回路と受信回路とを有する測距ユニットにおいて、切替部の接続先を送信回路と受信回路とのいずれかに切り替えるスイッチ部をさらに備えてもよい。
【0034】
このように構成された通信測距装置によれば、データ通信だけを行う既存の構成(無線通信ユニット)に設計上の変更をほとんど加えることなく、簡易に測距ユニットを付加することができるので、ひいては製造コストを抑制することができる。
【0035】
なお、上記目的を達成するためになされた第3発明である親機は、第1発明の通信測距複合システムに用いられる親機であって、無線通信手段が、第1の通信フレームの送信後に第1のトリガ信号を出力し、信号制御部が、無線通信手段から第1のトリガ信号を入力すると、予め設定された第1の送信時間α後に矩形波のパルス信号(第1のパルス信号)を送信する。
【0036】
そして、時間算出部が、子機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミング(信号制御部による送信タイミング)からその第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、距離測定手段が、子機から応答時間Tsを示す情報を受信すると、時間算出部にて算出した待機時間Tmとその応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0037】
つまり、本発明の親機は、第2発明の通信測距装置が有する親機としての機能に特化したことにより、子機と共に第1発明の通信測距複合システムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0038】
また、上記目的を達成するためになされた第4発明である子機は、第1発明の通信測距複合システムに用いられる子機であって、無線通信手段が、第1の通信フレームの受信後に第2のトリガ信号を出力する。そして、信号制御部が、無線通信手段から第2のトリガ信号を入力すると、予め設定された第2の送信時間β後にパルス信号である第2のパルス信号を送信する。さらに、時間算出部が、親機から第1のパルス信号を受信すると、その第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミング(信号制御部による送信タイミング)までの時間(応答時間Ts)を算出し、距離測定手段が、親機から待機時間Tmを示す情報を受信すると、その待機時間Tmと時間算出部にて算出した応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0039】
つまり、本発明の親機は、第2発明の通信測距装置が有する子機としての機能に特化したことにより、親機と共に第1発明の通信測距複合システムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【図面の簡単な説明】
【0040】
【図1】本発明が適用された通信測距複合システムの概略を説明するためのシーケンス図である。
【図2】通信測距複合システムにおける測距の原理を説明するためのシーケンス図である。
【図3】本発明が適用された通信測距装置の構成を示すブロック図である。
【図4】SFDタイミング信号の生成過程を表す説明図である。
【図5】カウンタ入力信号の生成過程を表す説明図である。
【図6】測距ユニットにおける親機としての機能を説明するためのタイミング図である。
【図7】測距ユニットにおける子機としての機能を説明するためのタイミング図である。
【図8】測距処理の変形例を説明するためのシーケンス図である。
【図9】他の実施形態における通信測距装置の構成を示すブロック図である。
【発明を実施するための形態】
【0041】
以下に、本発明の実施形態を図面と共に説明する。
[全体構成]
図1は、本発明が適用された通信測距複合システムの概略を説明するためのシーケンス図である。
【0042】
通信測距複合システム1は、車両や携帯電話、道路等に設置(搭載)されて短距離無線通信を行う複数の通信機2から構成され、IEEE802.15.4(ZigBee)に基づく短距離無線通信方式とTWR方式とを組み合わせて用いるように予め規定された通信プロトコルに従って、情報の伝達と測距とを行うシステムである。
【0043】
なお、本実施形態の通信プロトコルでは、例えばZigBee等の短距離無線通信方式で使用される特定の周波数帯(例えば2.4GHz帯)の通信チャンネルを用いて、情報伝達用の制御フレームと測距用の信号(測距信号)との送受信を行うように規定されている。
【0044】
具体的には、上記の通信機2のうち、図1に示すように、情報発信源である通信機を親機3、親機3に情報を返信する通信機を子機4として説明すると、まず、親機3が、子機4との間で通信を確立する前に、キャリアセンスを行って通信チャンネルが空いていれば制御フレームの送信を開始するCSMA/CA(Carrier Sense Multiple Access / Collision Avoidance )を実行する。
【0045】
本実施形態の通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間(例えば192μs)を利用して、親機3と子機4との距離(以下、通信機間距離という)を測定する(測距を行う)ように構成されている。なお、測距の回数を増やすため、あるいは別の方法として、RTSフレームの送受信とCTSフレームの送受信との間の空白時間を利用して測距を行うようにしてもよいが、基本的な原理は同じであるため、詳細な説明については省略する。
【0046】
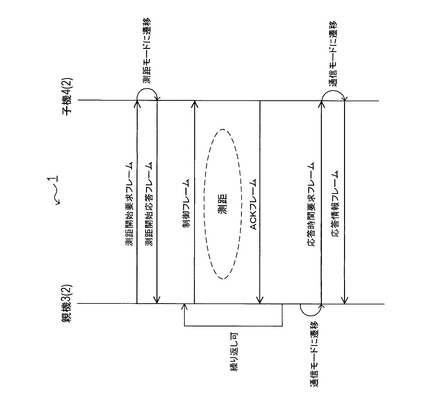
ここで、図2は、通信測距複合システム1における測距の原理を説明するためのシーケンス図である。
具体的には、通信測距複合システム1では、図2に示すように、親機3が、制御フレーム(第1の通信フレームに相当する)を子機4に送信したことをトリガとして、そのトリガの検出後に予め設定された第1の送信時間α後に矩形波のパルス信号(第1のパルス信号)を子機4に送信する。なお、第1の送信時間αは、第1のパルス信号の送信タイミングが制御フレームの送信タイミングに基づいて生成するように予め設定された時間であり、後述するが、測距結果に影響を及ぼさないことから必ずしも高精度に設定する必要はない。
【0047】
そして、子機4が、制御フレームを親機3から受信したことをトリガとして、そのトリガの検出後に上記の第1の送信時間αよりも長い時間として予め設定された第2の送信時間β後に矩形波のパルス信号(第2のパルス信号)を親機3に送信する。なお、第2の送信時間βは、子機4が第2のパルス信号を親機3に送信する前に、親機3から第1のパルス信号を受信可能な時間として予め設定されている。補足すると、第2の送信時間βは、第2のパルス信号の送信タイミングが制御フレームの受信タイミング(及び第1のパルス信号の受信)に基づいて生成するように予め設定された時間であり、後述するが、測距結果に影響を及ぼさないことから必ずしも高精度に設定する必要はない。
【0048】
さらに、子機4が、親機3から第1のパルス信号を受信すると、例えば第2のパルス信号を親機3に送信した後に、第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間)Tsを求め、ACKフレームを親機3に送信する。なお、子機4は、応答時間Tsを表す情報(応答情報フレーム)を、ACKフレームに含まれるようにして送信してもよい(またはACKフレームと共に親機3に送信してもよい)し、親機3からの要求(応答時間要求フレーム)に応じて送信してもよい(図1参照)。
【0049】
ここで、親機3が、子機4から第2のパルス信号を受信すると、第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間)Tmを求め、子機4から応答情報を受信すると、光速をcとする次式(1)を用いて、親機3と子機4との間の通信機間距離Dを測定する。
【0050】
D=(Tm−Ts)c/2 …(1)
すなわち、親機3は、自機にて計測した待機時間Tmと応答情報が示す応答時間Tsとの差分をパルス信号の往復に要する伝播遅延時間とし、この伝播遅延時間を2で除算して片道分の伝播遅延時間を求め、これに光速cを乗算することにより、通信機間距離Dを算出する。
【0051】
このようにして、通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して、効率的に測距を行うようにしている。なお、ここでは、親機3が通信機間距離Dを算出する構成について説明したが、同様の原理によって、親機3が子機4に待機時間Tmを表す情報(待機情報)を、例えば応答時間要求フレームとともに送信し、この待機情報を受信した子機4が通信機間距離Dを算出するようにしてもよい。すなわち、親機3および子機4の少なくとも一方が通信機間距離Dを測定するように構成されていればよい。
【0052】
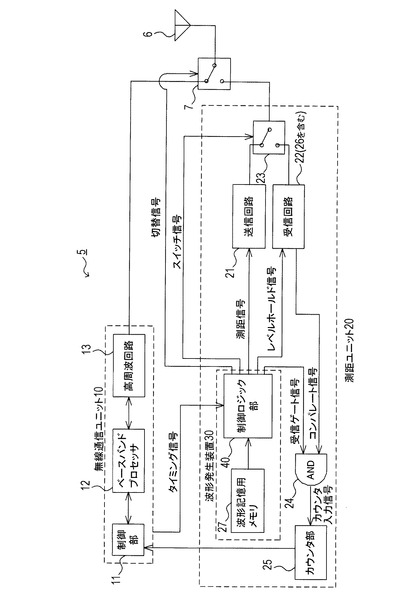
[通信測距装置の構成]
次に、図3は、本発明が適用された通信測距装置の構成を示すブロック図である。なお、本実施形態の通信測距装置は、前述の親機3としての機能と子機4としての機能とを有する通信機2として構成されている。
【0053】
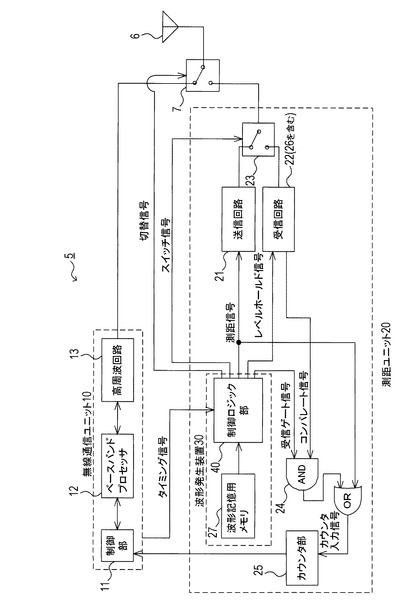
具体的には、図3に示すように、通信測距装置5は、ZigBeeを利用して情報を送受信するための無線通信ユニット10と、無線通信ユニット10に後付けされてTWR方式を利用して測距を行うための測距ユニット20と、短距離無線通信(例えば100m以内程度の通信)と測距を行うためのアンテナ6と、アンテナ6の接続先を無線通信ユニット10と測距ユニット20とのいずれか一方に切り替えるための切替部7とを備えている。
【0054】
無線通信ユニット10は、測距ユニット20に対して各種信号の授受等を行う制御部11と、制御部11にて生成される送信データに対して各種処理を施して無線信号(制御フレーム)を生成するベースバンドプロセッサ(以下、BBPという)12と、BBP12が生成した無線信号を予め設定された周波数帯の信号にアップコンバートして、切替部7を介してアンテナ6へ出力する高周波回路13とを備える。
【0055】
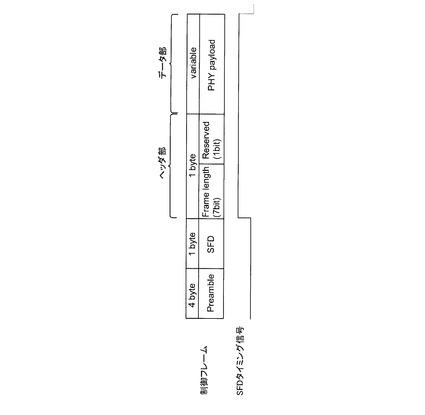
BBP12は、制御部11から入力された送信データに符号化処理およびインターリーブ処理を施して符号列を生成した符号列(データ部)に、送信データの先頭(始まり)を示すプリアンブルやフレームの開始を示すSFD(Start of Frame Delimiter)、ヘッダ部を付加(挿入)し、これらが挿入された符号列(制御フレーム)に対応して搬送波を変調して、その搬送波からなる無線信号を高周波回路13に出力する。
【0056】
また、BBP12は、受信信号を直交復調してI成分及びQ成分を表すベースバンド信号を生成し、そのベースバンド信号に付加されているプリアンブルを検出して、プリアンブルに続くSFD、ヘッダ部、及びデータ部を復元するのに要する同期タイミングを設定する。そして、その同期タイミングで復調されたシンボルに復号化処理を施して、制御フレームを復元して制御部11に出力するように構成されている。
【0057】
また、高周波回路13は、BBP12から入力した無線信号をアップコンバートしてアンテナ6へ出力する他に、アンテナ6から切替部7を介して入力される受信信号を、信号処理に適した周波数帯の信号にダウンコンバートしてBBP12に出力するように構成されている。
【0058】
制御部11は、BBP12から入力された制御フレームを読み込むとともに、SFDの終了を検出したタイミングで制御信号(SFDタイミング信号(図4参照);第2のトリガ信号に相当)を測距ユニット20に出力するとともに、測距ユニット20から後述するカウンタ信号を入力し、このカウンタ信号に基づいて、通信機間距離Dを測定する測距処理(後述する)を行う。
【0059】
また、本実施形態の制御部11は、CSMA/CAといったアクセス制御に必要な処理を行うとともに、例えばアクセス制御によって通信が確立した他の通信機(通信相手)から、その通信相手に関する属性情報を受信すると、測距処理で測定した通信機間距離Dと対応づけて、その受信した属性情報を記憶する。
【0060】
なお、本実施形態の制御部11は、自装置に関する属性情報(例えば、自装置の種別や位置情報等)をデータ部に書き込み、通信相手に制御フレームを送信するための送信データをBBP12に出力する。そして、その出力後の所定のタイミングで制御信号(BBPタイミング信号;第1のトリガ信号に相当)を測距ユニット20に出力するように構成されている。なお、BBPタイミング信号は、SFDタイミング信号と同様のタイミングで生成されてもよい。
【0061】
[測距ユニット20]
測距ユニット20は、上記の測距処理に必要な情報を制御部11に供給するユニットであって、制御部11から入力されるSFDタイミング信号またはBBPタイミング信号に従って、測距信号やスイッチ切替信号などの制御信号を発生させる波形発生装置30(詳しくは後述する制御ロジック部40)と、測距を行うための測距信号を通信相手に送信する送信回路21と、通信相手から測距信号を受信する受信回路22と、切替部7の接続先(ひいてはアンテナ6の接続先)を送信回路21と受信回路22とのいずれか一方に切り替えるためのスイッチ部23と、受信回路22からの入力と波形発生装置30からの後述する受信ゲート信号との論理積を出力するAND回路24と、AND回路24からの入力に基づいて待機時間Tmおよび応答時間Tsを算出するためのカウンタ部25とを備えている。
【0062】
なお、測距信号には、無線通信ユニット10による制御フレームの送信終了後に出力される矩形波のパルス信号(以下、第1のパルス信号という)、無線通信ユニット10による制御フレームの受信終了後に出力される矩形波のパルス信号(以下、第2のパルス信号という)、及び、これらパルス信号の送信前に出力される無変調波としてのサンプル信号が含まれている。また、矩形波や無変調波はZigBeeの通信帯域と同じ帯域幅となるように帯域制限された波形を波形記憶用メモリ27に格納しているものとする。
【0063】
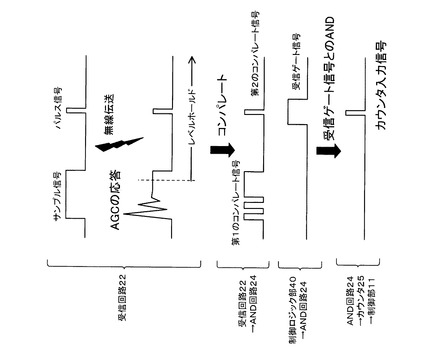
受信回路22には、サンプル信号の受信電力(RSSI)を検出し、そのRSSIが所定の目標範囲内になるよう利得調整をしながら増幅する自動利得制御(AGC)を行うAGC回路26を備えている。なお、AGC回路26は、波形発生装置30から出力されるレベルホールド信号によっても制御されており、ホールドの場合は、利得制御動作を止め、ホールド直前に設定された利得で待機する。
【0064】
そして、受信回路22は、規定の閾値を上回る受信電力(RSSI)を検出すると、その検出期間をハイレベルとして表すコンパレート信号をAND回路24に出力する。なお、コンパレート信号には、上記の電力閾値を上回るパルス信号に加えて、AGCを行っている間に上記の電力閾値を上回るサンプル信号に対応する検出信号も含まれる。
【0065】
波形発生装置30は、アンテナ6の接続先を無線通信ユニット10から測距ユニット20に切り替えるための第1の切替信号、アンテナ6の接続先を測距ユニット20から無線通信ユニット10に切り替えるための第2の切替信号、切替部7の接続先を受信回路22から送信回路21に切り替えるための第1のスイッチ信号、切替部7の接続先を送信回路21から受信回路22に切り替えるための第2のスイッチ信号、前述の測距信号、レベルホールド信号、及び、後述する受信ゲート信号といった各種信号の波形を記憶するメモリ27と、メモリ27から各種信号を読み出して、切替部7、スイッチ部23、送信回路21、AND回路24に必要な信号を出力する制御ロジック部40とを備えている。
【0066】
図5に示すように、受信ゲート信号は、第1のパルス信号、及び、第2のパルス信号の近傍でHiとなる信号である。このため、AND回路24によって第2のコンパレート信号だけが取り出され、カウンタ入力信号としてカウンタ部25に出力される。
【0067】
[親機としての機能]
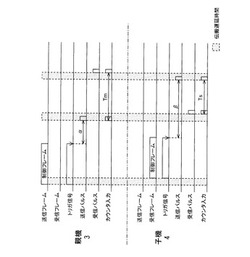
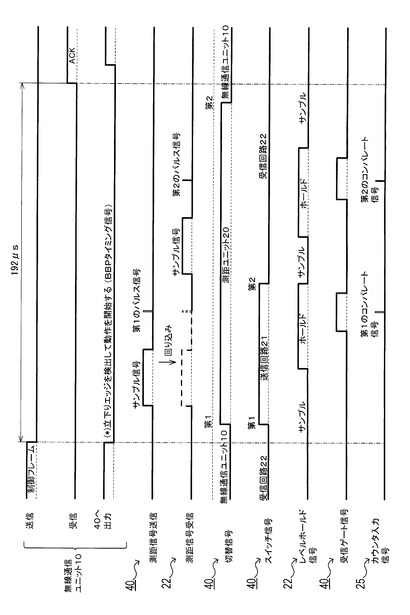
次に、図6は、測距ユニット20における親機3としての機能を説明するためのタイミング図である。
【0068】
図6に示すように、制御ロジック部40は、通信相手に制御フレームを送信した無線通信ユニット10からBBPタイミング信号を入力すると、メモリ27から第1の切替信号を読み出して切替部7に出力すると共に、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を高周波回路13から送信回路21に切り替える。なお、本実施形態のBBPタイミング信号(SFDタイミング信号も同様)は、無線通信ユニット10と制御ロジック部40とを接続する信号線の状態が、ハイレベルからローレベルに切り替わることにより、無線通信ユニット10から制御ロジック部40に測距の開始タイミングを伝達する信号である。そして、無線通信ユニット10は、BBPタイミング信号(SFDタイミング信号も同様)の立下りエッジを検出することをトリガとして動作を開始する。
【0069】
次に、制御ロジック部40は、BBPタイミング信号の立下りエッジを検出してから予め設定された第1の送信時間α後に第1のパルス信号を送信するように、メモリ27からサンプル信号、第1のパルス信号を順に読み出して送信回路21に出力することにより、アンテナ6を介して通信相手に測距信号を送信する。
【0070】
なお、これらサンプル信号および第1のパルス信号は、スイッチ部23のアイソレーションレベルに応じた強度で送信回路21から受信回路22に回り込むようにされている。つまり、受信回路22は、その回り込みによって入力されたサンプル信号に基づいてAGCを行うと共に、コンパレータによって2値化された第1および第2のコンパレート信号をAND回路24に出力するように構成されている。
【0071】
そして、AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第1のパルス信号の送信タイミングを表す信号;以下、第1の送信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0072】
次に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第2のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を送信回路21から受信回路22に切り替える。
【0073】
そして、通信相手によって送信されてくる測距信号(第2のパルス信号を含む)を受信した受信回路22から、第1および第2のコンパレート信号をAND回路24に出力する。また、AND回路24は、同様にして、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第2のパルス信号の受信タイミングを表す信号;以下、第2の受信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0074】
最後に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第2の切替信号を読み出して切替部7に出力することにより、アンテナ6の接続先を受信回路22から無線通信ユニット10に切り替える。そして、カウンタ部25は、第1の送信タイミング信号が入力されてから第2の受信タイミング信号が入力されるまでの間の時間をカウント(算出)し、その算出結果(ひいては待機時間Tm)を制御部11に出力する。
【0075】
このようにして、測距ユニット20は、親機3の機能として、無線通信ユニット10が制御フレームを送信して無線相手からACKフレームを受信するまでの空白時間(例えば192μs)の間に、待機時間Tmを表す情報(待機情報)を制御部11に出力するようにしている。
【0076】
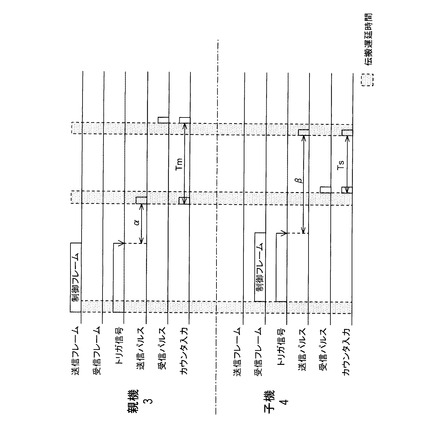
[子機としての機能]
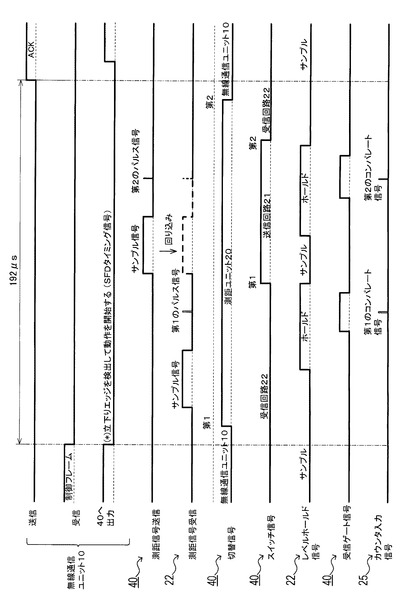
次に、図7は、測距ユニット20における子機4としての機能を説明するためのタイミング図である。なお、前述の親機としての機能と重複する部分については説明を省略する。
【0077】
図7に示すように、制御ロジック部40は、通信相手から制御フレームを受信した無線通信ユニット10から入力されるSFDタイミング信号の立下りエッジを検出することをトリガとして動作を開始する。そして、動作が開始されると、メモリ27から第1の切替信号を読み出して切替部7に出力すると共に、メモリ27から第2のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を無線通信ユニット10から受信回路22に切り替える。
【0078】
そして、通信相手によって送信されてくる測距信号(第1のパルス信号を含む)を受信した受信回路22から、第1及び第2のコンパレート信号をAND回路24に出力する。また、AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第1のパルス信号の受信タイミングを表す信号;以下、第1の受信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0079】
次に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を受信回路22から送信回路21に切り替える。そして、SFDタイミング信号の立下りエッジを検出してから第1の送信時間αよりも長い時間として予め設定された第2の送信時間β後に第2のパルス信号を送信するように、メモリ27からサンプル信号、第2のパルス信号を順に読み出して送信回路21に出力することにより、アンテナ6を介して通信相手に測距信号を送信する。
【0080】
サンプル信号および第2のパルス信号は、スイッチ部23のアイソレーションレベルに応じた強度で送信回路21から受信回路22に回り込むようにされている。AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第2のパルス信号の送信タイミングを表す信号;以下、第2の送信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0081】
最後に、制御ロジック部40は、所定期間だけ受信ゲート信号をAND回路24に出力すると、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力すると共に、メモリ27から第2の切替信号を読み出して切替部7に出力することにより、アンテナ6の接続先を送信回路21から無線通信ユニット10に切り替える。そして、カウンタ部25は、第1の受信タイミング信号が入力されてから第2の送信タイミング信号が入力されるまでの間の時間をカウント(算出)し、その算出結果(ひいては応答時間Ts)を制御部11に出力する。
【0082】
このようにして、測距ユニット20は、子機4の機能として、無線通信ユニット10が制御フレームを受信して無線相手にACKフレームを送信するまでの空白時間(例えば192μs)の間に、応答時間Tsを表す情報(応答時間情報)を制御部11に出力するようにしている。
【0083】
[測距処理]
制御部11は、親機3の機能として制御フレームを通信相手に送信すると、測距ユニット20から入力される待機情報に基づいて、待機時間Tmを読み出す。そして、通信相手から応答時間が書き込まれたフレーム(図1に記載されている応答情報フレーム)を受信すると、そのフレームに含まれている応答時間情報に基づいて、応答時間Tsを読み出して、前述の(1)式により、通信機間距離Dを測定する。なお、制御部11は、通信相手からACKフレームを受信すると、通信機間距離Dを測定することに加えて、測距ユニット20から入力された待機情報を次回の制御フレームに書き込んで通信相手に送信する。
【0084】
また、制御部11は、子機4の機能として、測距ユニット20から入力される応答情報に基づいて、応答時間Tsを読み出す。そして、測距ユニット20から入力された応答時間情報をパケット(図1に記載されている応答情報フレーム)に書き込んで通信相手に送信する。次に、通信相手から制御フレームを受信すると、その制御フレームに含まれている待機情報に基づいて、待機時間Tmを読み出して、前述の(1)式により、通信機間距離Dを測定する。
【0085】
このようにして、本実施形態の制御部11は、親機3および子機4のいずれの機能によっても通信機間距離Dを測定するようにしている。
[本実施形態の効果]
以上説明したように、通信測距複合システム1では、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間としての待機時間Tmを算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間としての応答時間Tsを算出する。
【0086】
このため、通信測距複合システム1では、制御フレーム(あるいはACKフレーム)の送信タイミングや受信タイミングを正確に検出する必要がなく、第1の送信時間α(あるいは第2の送信時間β)にズレが生じた場合であっても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
【0087】
したがって、通信測距複合システム1によれば、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して、パルス信号を送受信することで、待機時間Tmと応答時間Tsとの差分(伝播遅延時間)に基づき、効率的かつ精度よく通信機間距離Dを測定することができる。
【0088】
また、通信測距装置5は、サンプル信号およびパルス信号を送信する際に、スイッチ部23のアイソレーションレベルに応じた強度でこれら信号が送信回路21から受信回路22に回り込むように構成され、且つ、受信回路22がこれら信号のうちサンプル信号に基づいてAGCを行い、受信ゲート信号とのANDによって送信信号からパルス信号だけを取り出すように構成されている。
【0089】
したがって、通信測距装置5によれば、AGCに必要なサンプル信号をパルス信号と共に送信する場合であっても、複雑なソフトウェア処理を必要とすることなく、簡易なハードウェアの構成によって、パルス信号の送信タイミングを精確に検出することができる。
【0090】
[本実施形態と特許請求の範囲との対応関係]
なお、本実施形態において、無線通信ユニット10が無線通信手段、波形発生装置30が信号制御部、カウンタ部25が時間算出部、測距処理が距離測定手段、AGC回路26がAGC手段に相当する。
【0091】
[変形例]
次に、無線通信ユニット10の制御部11が実行する測距処理の変形例を、図8のシーケンス図を用いて説明する。
【0092】
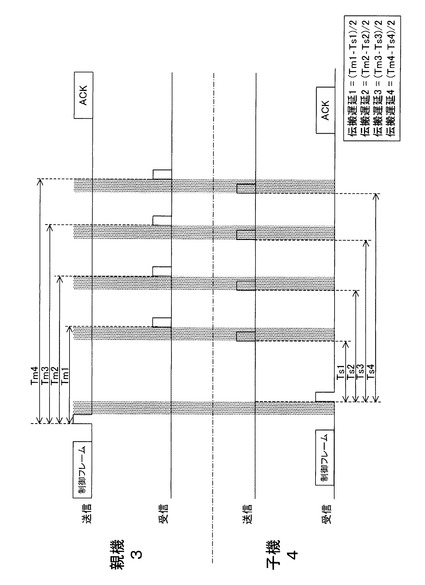
図8に示すように、制御部11は、親機3の機能として制御フレームを通信相手に送信すると、測距ユニット20から入力される待機情報に基づいて、前述の測距用通信回数(本実施形態では4回)に対応する待機時間Tm1〜Tm4を読み出す。そして、通信相手から応答時間が書き込まれたフレーム(図1に記載されている応答情報フレーム)を受信すると、そのフレームに含まれている応答時間情報に基づいて、4回分の応答時間Ts1〜Ts4を読み出して、前述の(1)式により、複数の通信機間距離D1〜D4を求め、これら通信機間距離D1〜D4の和を測距用通信回数(本実施形態では4回)で除算することにより、平均値としての通信機間距離Dを測定する。なお、制御部11は、通信相手からACKフレームを受信すると、通信機間距離Dを測定することに加えて、測距ユニット20から入力された待機情報を次回の制御フレームに書き込んで通信相手に送信する。
【0093】
また、制御部11は、子機4の機能として、測距ユニット20から入力される応答情報に基づいて、測距用通信回数(本実施形態では4回)に対応する応答時間Ts1〜Ts4を読み出す。そして、測距ユニット20から入力された応答時間情報をパケット(図1に記載されている応答情報フレーム)に書き込んで通信相手に送信する。次に、通信相手から制御フレームを受信すると、その制御フレームに含まれている待機情報に基づいて、4回分の待機時間Tm1〜Tm4を読み出して、前述の(1)式により、複数の通信機間距離D1〜D4を求め、これら通信機間距離D1〜D4の和を測距用通信回数(本実施形態では4回)で除算することにより、平均値としての通信機間距離Dを測定する。
【0094】
このようにして、本実施形態の制御部11は、親機3および子機4のいずれの機能によっても通信機間距離Dを測定するようにしている。なお、上記例では、複数の通信機間距離D1〜D4を測距用通信回数で単純に平均化することによって通信機間距離Dを算出しているが、制御フレームの送受信からACKフレームの送受信までのシーケンスを複数回行う場合、制御部11は、パルス信号の受信毎にAGC回路26にて検出されたRSSIに基づく重みを用いて、複数の通信機間距離D1〜D4(または伝播遅延時間)の加重平均を算出することにより、通信機間距離Dを算出してもよい。
【0095】
つまり、通信測距複合システム1では、上記の空白時間を利用して、子機4が間欠的に連続して複数の第2のパルス信号を送信し、その数に対応する複数の待機時間Tmおよび応答時間Tsが親機3および子機4によってそれぞれ算出されるため、一度のパケット通信によって複数の通信機間距離D1〜D4を算出することができる。
【0096】
[他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0097】
例えば、上記実施形態の通信測距装置5は、スイッチ部23のアイソレーションレベルに応じた強度でこれら信号が送信回路21から受信回路22に回り込むように構成しているが、これに限定されるものではなく、図9に示すように、制御ロジック部40から出力される測距信号と、AND回路24からの出力との論理和をカウンタ入力信号としてカウンタ部25に出力するOR回路を備えて構成してもよい。
【0098】
また、上記実施形態の通信測距装置5は、親機3としての機能と子機4としての機能とのいずれの機能も実現できるように構成されているが、これに限定されるものではなく、親機3または子機4の機能に特化させた構成であってもよい。
【0099】
また、上記実施形態の通信測距装置5では、カウンタ部25が待機時間Tmおよび応答時間Tsを算出するように構成されているが、これに限定されるものではなく、例えばカウンタ部25がカウンタ入力信号を制御部11に出力するようにし、制御部11がカウンタ入力信号に基づいて待機時間Tmおよび応答時間Tsを算出するように構成してもよい。
【0100】
また、上記実施形態の通信測距装置5では、制御部11がSFDタイミング信号およびBBPタイミング信号の出力、並びにアクセス制御を行うように構成されているが、これに限定されるものではなく、例えばBBP12がこれらの出力並びに制御を行うように構成してもよい。
【0101】
また、上記実施形態の通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して測距を行うようにしているが、これに限定されるものではなく、例えばRTSフレームの送受信とCTSフレームの送受信との間の空白時間を利用して測距を行うようにしてもよい。
【符号の説明】
【0102】
1…通信測距複合システム、2…通信機、3…親機、4…子機、5…通信測距装置、6…アンテナ、7…切替部、10…無線通信ユニット、11…制御部、12…ベースバンドプロセッサ(BBP)13…高周波回路、20…測距ユニット、21…送信回路、22…受信回路、23…スイッチ部、24…AND回路、25…カウンタ部、26…AGC回路、27…メモリ、30…波形発生装置、40…制御ロジック部。
【技術分野】
【0001】
本発明は、短距離無線通信によって情報を送受信すると共に通信機間の距離を測定する通信測距複合システム、通信測距装置、親機および子機に関する。
【背景技術】
【0002】
従来、情報通信技術を用いて人と道路と車両との間で情報を授受することにより、交通事故の防止や渋滞の緩和等を図る交通システムの実用化に向けた検討が行われている。そして、このような情報授受システムでは、その目的や用途に応じて各種の無線通信方式が採用されている。
【0003】
例えば、情報授受システムでは、車載器によって取得したGPS情報を車車間通信によって互いの車両が交換することによって、互いの位置を把握し、車両と車両とが衝突する事故を防止する仕組みがなされている。但し、歩行者等が携帯するような端末については、車載器のような高精度のGPS情報を得られないことが多い。
【0004】
一方、二つの通信機間で互いに信号を送受信する際の伝播遅延時間に基づいて、通信機間距離を測定する二方向測距(TWR;Two Way Ranging)が知られている。そして、このTWRにおいて、通信機間で互いに送受信する信号(搬送波)に情報をのせることにより、効率よく情報の授受と通信機間の距離とを測定する通信測距複合システムが提案されている。これにより、GPS情報の精度に依存することなく、互いの位置を把握することが期待される。
【0005】
具体的には、通信測距複合システムでは、情報(第1フレーム)の発信源である通信機を親機、親機に情報(第2フレーム)を返信する通信機を子機として、親機が第1フレームの送信終了時点から第2フレームの受信終了時点までの時間T1を計時し、子機が第1フレームの受信終了時点から第2フレームの送信終了時点までの時間T2を計時する。そして、これら時間T1またはT2を示す情報を受信した通信機(親機または子機)が、時間T1とT2との差分を伝播遅延時間として、この伝播遅延時間に係数(c/2;但し、cは光速)を乗じることにより通信機間距離を算出している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−232828号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、従来の通信測距複合システムでは、搬送波の変調方式によっては通信波形が複雑になるため、第1または第2フレーム(通信フレームと総称する)の受信終了タイミングの検出が複雑になり、このことが測距精度に影響を与える可能性があった。一方で、測距精度の向上を図ろうとして通信波形を単純化すると、例えばOFDM(Orthogonal Frequency Division Multiplexing)のようなマルチパスの影響を受けにくい変調方式を採用し難くなり、情報の伝達確度の低下に繋がりかねないという問題があった。
【0008】
本発明は、上記問題点を解決するために、通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム、通信測距装置、親機および子機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた第1発明である通信測距複合システムは、短距離無線通信を行う複数の通信機のうち、情報発信源である通信機を親機、この親機に情報を返信する通信機を子機として、互いに情報を送受信する際の伝播遅延時間により、親機と子機との距離である通信機間距離を測定するシステムである。
【0010】
本発明では、このような通信測距複合システムにおいて、親機から発信される情報を表す通信フレームを第1の通信フレーム、子機から親機に返信される情報を表す通信フレームを第2の通信フレームとして、親機が、第1の通信フレームの送信終了後に矩形波のパルス信号(第1のパルス信号)を子機に送信する。そして、子機が、親機から第1の通信フレームと第1のパルス信号とを受信すると、第2の通信フレームの返信前に、第1の通信フレームの受信終了後に矩形波のパルス信号(第2のパルス信号)を親機に送信する。
【0011】
次に、子機が、親機に第2のパルス信号を送信すると、第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間としての応答時間Tsを算出し、親機が、子機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間としての待機時間Tmを算出する。
【0012】
最後に、親機および子機の少なくとも一方が、待機時間Tmと応答時間Tsとの差分を伝播遅延時間として、例えばこの伝播遅延時間に係数(c/2;但し、cは光速)を乗じることにより、通信機間距離を測定する。
【0013】
したがって、本発明の通信測距複合システムによれば、第1の通信フレームの送受信と第2の通信フレームの送受信との間の時間を利用して、パルス信号の送受信を行うことにより、効率よく情報の伝達と測距とを行うことができる。また、情報の伝達と測距とをそれぞれに適した別々の通信波形を用いて行うとともに、パルス信号が矩形波であるためエッジを検出することが容易であることから、ひいては、通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0014】
なお、本発明では、親機および子機の少なくとも一方が通信機間距離を測定すればよいが、親機が行う場合には次のような構成によって、効率性をさらに上げることができる。
すなわち、第2の通信フレームには、子機による算出結果としての応答時間Tsを示す情報が含まれており、親機が、子機から第2の通信フレームを受信すると、当該親機による算出結果としての待機時間Tmとその応答時間Tsとの差分を算出することにより、通信機間距離を測定する。これにより、通信フレームの送受信回数をむやみに増加させずに済むので、ひいてはより効率的に情報の伝達と測距とを行うことができる。
【0015】
また、本発明では、親機および子機が、通信フレームとパルス信号とについて、同一の通信チャンネルを用いて(即ち、同一の周波数と同一の帯域幅にて)送受信することにより、周波数資源を節約でき、且つ、他システムへの干渉を防止することができる。さらに言うと、通信チャンネルを切り替えるための装置構成や処理を省略できるので、簡易且つより効率的に情報の伝達と測距とを行うことができる。
【0016】
なお、本発明では、第1の通信フレームの送受信と第2の通信フレームの送受信との間の時間内に、パルス信号の送受信を一回行うように構成してもよいが、複数回行うことにより、測距精度をさらに向上させることができる。
【0017】
すなわち、親機および子機の少なくとも一方が、予め規定された測距用通信回数だけパルス信号を連続的に送信すると共に、子機が、親機から第1のパルス信号を受信する毎に応答時間Tmを算出し、親機が、子機から第2のパルス信号を受信する毎に待機時間Tsを算出する。そして、親機および子機の少なくとも一方が、測距用通信回数に対応する複数の伝播遅延時間を平均化することによって、通信機間距離を測定する。これにより、パルス信号のエッジ検出に伴う誤差(つまり、受信タイミングの検出誤差)を縮小することが可能となり、ひいては測距精度をより向上させることができる。
【0018】
また、本発明では、親機および子機の少なくとも一方が、パルス信号の受信毎にその受信電力を検出すると共に、その検出結果に基づく重みを用いて複数の伝播遅延時間の加重平均を算出することにより、通信機間距離を測定してもよい。この構成によれば、単純に複数の伝播遅延時間を平均化する場合と比較して、パルス信号のエッジ検出に対する確からしさ(尤度)が上記の算出結果に反映される分、測距精度をより向上させることができる。
【0019】
なお、補足すると、既存の通信機では、通信フレームの受信電力(RSSI)を得られるものも多い。本発明では、通信フレームの直後にパルスを生成するため、通信フレームのRSSIとパルス信号のRSSIには高い相関がある。パルスを用いた測距の場合、SNR(Signal to Noise Ratio:信号対雑音強度比)は、時間的なパルスのブレ、いわゆるジッタと1対1の関係になる(非特許文献:「タイミングジッタの要因となるランダムノイズ」MAXIMアプリケーションノート,APP3631,02 Sep. 2005参照)。ジッタは測距誤差となるため、SNR値を推定することができるRSSIは、測距精度を知るためのパラメータとなる。
【0020】
パルスを用いた測距では、SNRを向上させるために、測距を繰り返し行って、その平均値をとる方法がよく用いられるが、その平均化回数は、所望SNRで決まる。RSSIによってSNRが推定できれば、所望SNRを得るために必要な平均化回数を求めることができる。このように、必要な平均化回数を求めることができれば、必要最低限の時間(ひいては測距回数)で最適な測距値を得ることができる。
【0021】
ところで、本発明では、第1の通信フレームがデータフレームであり、第2の通信フレームには、そのデータフレームの受信毎に子機から親機に返信するように予め規定された確認応答を示すACK情報(ACK;Acknowledgment)が含まれている構成であってもよい。
【0022】
また、本発明では、第1の通信フレームが、親機から子機へのデータ送信前の確認要求を示すRTSフレーム(RTS;Request To Send)であり、第2の通信フレームには、そのRTSフレームの受信毎にデータ受信が可能であれば子機から親機に返信するように予め規定された確認応答を示すCTSフレーム(CTS;Clear To Send)が含まれている構成であってもよい。
【0023】
前者および後者の場合ともに、短距離無線通信を行うための通信プロトコルに変更を加えることなく、パルス信号を送受信することが可能であり、ひいては既存の通信プロトコルを損なうことなく、情報の伝達と測距とを効率的かつ精度よく行うことができる。
【0024】
また、上記目的を達成するためになされた第2発明である通信測距装置は、短距離無線通信を行う装置であって、通信相手の通信機との間で互いに情報を送受信する際の伝播遅延時間により、その通信機と当該装置との距離である通信機間距離を測定する。
【0025】
具体的には、本発明の通信測距装置では、当該装置が情報発信源として他の通信機に送信する通信フレームを第1の通信フレーム、第1の通信フレームの送信元である他の通信機に当該装置が返信する通信フレームを第2の通信フレームとして、無線通信手段が、第1及び第2の通信フレームを送受信すると共に、このうち、第1の通信フレームの送信後に第1のトリガ信号、第1の通信フレームの受信後に第2のトリガ信号をそれぞれ出力する。
【0026】
そして、信号制御部が、無線通信手段から第1のトリガ信号を入力すると、予め設定された送信時間α後に矩形波のパルス信号(第1のパルス信号)を送信すると共に、無線通信手段から第2のトリガ信号を入力すると、第1の送信時間αよりも予め長く設定された第2の送信時間β後に矩形波のパルス信号(第2のパルス信号)を送信する。
【0027】
さらに、時間算出部が、通信機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミング(信号制御部による送信タイミング)からその第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出すると共に、通信機から第1のパルス信号を受信すると、その第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミング(信号制御部による送信タイミング)までの時間(応答時間Ts)を算出する。
【0028】
そして、距離測定手段が、通信機から応答時間Tsを示す情報を受信すると、時間算出部にて算出した待機時間Tmとその応答時間Tsとの差分を伝播遅延時間とし、通信機から待機時間Tmを示す情報を受信すると、その待機時間Tmと時間算出部にて算出した応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0029】
このように構成された通信測距装置では、通信フレームの同期信号をトリガとして、決められたパルスを出力するだけでTWRによる測距が行われることになる。補足すると、無線通信では、同期処理は難しい技術の一つであり、その回路も複雑なものになるが、本発明によれば、測距パルスの同期は、通信機が行っていることになるので、測距回路は簡単なものとなる。
【0030】
また、本発明の通信測距装置では、第1発明の通信測距複合システムにおける親機としての機能と子機としての機能とを有しているので、このシステムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0031】
また、本発明の通信測距装置では、自動利得制御(AGC:Automatic Gain Control)手段が、パルス信号の受信前にそのパルス信号と同一の振幅を有するサンプル信号を受信すると、そのサンプル信号に基づいて自動利得調整を行う。但し、信号制御部が、パルス信号の送信前に上記のサンプル信号を送信するように構成されている。そして、時間算出部が、予め設定された電力閾値を上回る受信電力を検出したタイミングをパルス信号の受信タイミングとして、待機時間Tmおよび応答時間Tsを算出する。
【0032】
このように構成された通信測距装置によれば、パルス信号の受信電力によらず、パルス信号のエッジ検出タイミングの尤度を高めることができ、ひいては測距精度をより向上させることができる。
【0033】
さらに、本発明の通信測距装置では、無線通信手段と距離測定手段とを少なくとも有するユニットを無線通信ユニット、信号制御部と時間算出部とを少なくとも有するユニットを測距ユニットとして、短距離無線通信を行うアンテナと、そのアンテナの接続先を無線通信ユニットと測距ユニットとのいずれか一方に切り替えるための切替部とを備える。そして、信号制御部が、無線通信手段からトリガ信号(第1又は第2のトリガ信号)を入力すると、切替部を介してアンテナの接続先を無線通信ユニットから測距ユニットに切り替えるように構成してもよい。また、送信回路と受信回路とを有する測距ユニットにおいて、切替部の接続先を送信回路と受信回路とのいずれかに切り替えるスイッチ部をさらに備えてもよい。
【0034】
このように構成された通信測距装置によれば、データ通信だけを行う既存の構成(無線通信ユニット)に設計上の変更をほとんど加えることなく、簡易に測距ユニットを付加することができるので、ひいては製造コストを抑制することができる。
【0035】
なお、上記目的を達成するためになされた第3発明である親機は、第1発明の通信測距複合システムに用いられる親機であって、無線通信手段が、第1の通信フレームの送信後に第1のトリガ信号を出力し、信号制御部が、無線通信手段から第1のトリガ信号を入力すると、予め設定された第1の送信時間α後に矩形波のパルス信号(第1のパルス信号)を送信する。
【0036】
そして、時間算出部が、子機から第2のパルス信号を受信すると、第1のパルス信号の送信タイミング(信号制御部による送信タイミング)からその第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、距離測定手段が、子機から応答時間Tsを示す情報を受信すると、時間算出部にて算出した待機時間Tmとその応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0037】
つまり、本発明の親機は、第2発明の通信測距装置が有する親機としての機能に特化したことにより、子機と共に第1発明の通信測距複合システムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【0038】
また、上記目的を達成するためになされた第4発明である子機は、第1発明の通信測距複合システムに用いられる子機であって、無線通信手段が、第1の通信フレームの受信後に第2のトリガ信号を出力する。そして、信号制御部が、無線通信手段から第2のトリガ信号を入力すると、予め設定された第2の送信時間β後にパルス信号である第2のパルス信号を送信する。さらに、時間算出部が、親機から第1のパルス信号を受信すると、その第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミング(信号制御部による送信タイミング)までの時間(応答時間Ts)を算出し、距離測定手段が、親機から待機時間Tmを示す情報を受信すると、その待機時間Tmと時間算出部にて算出した応答時間Tsとの差分を伝播遅延時間として、通信機間距離を測定する。
【0039】
つまり、本発明の親機は、第2発明の通信測距装置が有する子機としての機能に特化したことにより、親機と共に第1発明の通信測距複合システムに好適に用いることができ、ひいては通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことができる。
【図面の簡単な説明】
【0040】
【図1】本発明が適用された通信測距複合システムの概略を説明するためのシーケンス図である。
【図2】通信測距複合システムにおける測距の原理を説明するためのシーケンス図である。
【図3】本発明が適用された通信測距装置の構成を示すブロック図である。
【図4】SFDタイミング信号の生成過程を表す説明図である。
【図5】カウンタ入力信号の生成過程を表す説明図である。
【図6】測距ユニットにおける親機としての機能を説明するためのタイミング図である。
【図7】測距ユニットにおける子機としての機能を説明するためのタイミング図である。
【図8】測距処理の変形例を説明するためのシーケンス図である。
【図9】他の実施形態における通信測距装置の構成を示すブロック図である。
【発明を実施するための形態】
【0041】
以下に、本発明の実施形態を図面と共に説明する。
[全体構成]
図1は、本発明が適用された通信測距複合システムの概略を説明するためのシーケンス図である。
【0042】
通信測距複合システム1は、車両や携帯電話、道路等に設置(搭載)されて短距離無線通信を行う複数の通信機2から構成され、IEEE802.15.4(ZigBee)に基づく短距離無線通信方式とTWR方式とを組み合わせて用いるように予め規定された通信プロトコルに従って、情報の伝達と測距とを行うシステムである。
【0043】
なお、本実施形態の通信プロトコルでは、例えばZigBee等の短距離無線通信方式で使用される特定の周波数帯(例えば2.4GHz帯)の通信チャンネルを用いて、情報伝達用の制御フレームと測距用の信号(測距信号)との送受信を行うように規定されている。
【0044】
具体的には、上記の通信機2のうち、図1に示すように、情報発信源である通信機を親機3、親機3に情報を返信する通信機を子機4として説明すると、まず、親機3が、子機4との間で通信を確立する前に、キャリアセンスを行って通信チャンネルが空いていれば制御フレームの送信を開始するCSMA/CA(Carrier Sense Multiple Access / Collision Avoidance )を実行する。
【0045】
本実施形態の通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間(例えば192μs)を利用して、親機3と子機4との距離(以下、通信機間距離という)を測定する(測距を行う)ように構成されている。なお、測距の回数を増やすため、あるいは別の方法として、RTSフレームの送受信とCTSフレームの送受信との間の空白時間を利用して測距を行うようにしてもよいが、基本的な原理は同じであるため、詳細な説明については省略する。
【0046】
ここで、図2は、通信測距複合システム1における測距の原理を説明するためのシーケンス図である。
具体的には、通信測距複合システム1では、図2に示すように、親機3が、制御フレーム(第1の通信フレームに相当する)を子機4に送信したことをトリガとして、そのトリガの検出後に予め設定された第1の送信時間α後に矩形波のパルス信号(第1のパルス信号)を子機4に送信する。なお、第1の送信時間αは、第1のパルス信号の送信タイミングが制御フレームの送信タイミングに基づいて生成するように予め設定された時間であり、後述するが、測距結果に影響を及ぼさないことから必ずしも高精度に設定する必要はない。
【0047】
そして、子機4が、制御フレームを親機3から受信したことをトリガとして、そのトリガの検出後に上記の第1の送信時間αよりも長い時間として予め設定された第2の送信時間β後に矩形波のパルス信号(第2のパルス信号)を親機3に送信する。なお、第2の送信時間βは、子機4が第2のパルス信号を親機3に送信する前に、親機3から第1のパルス信号を受信可能な時間として予め設定されている。補足すると、第2の送信時間βは、第2のパルス信号の送信タイミングが制御フレームの受信タイミング(及び第1のパルス信号の受信)に基づいて生成するように予め設定された時間であり、後述するが、測距結果に影響を及ぼさないことから必ずしも高精度に設定する必要はない。
【0048】
さらに、子機4が、親機3から第1のパルス信号を受信すると、例えば第2のパルス信号を親機3に送信した後に、第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間)Tsを求め、ACKフレームを親機3に送信する。なお、子機4は、応答時間Tsを表す情報(応答情報フレーム)を、ACKフレームに含まれるようにして送信してもよい(またはACKフレームと共に親機3に送信してもよい)し、親機3からの要求(応答時間要求フレーム)に応じて送信してもよい(図1参照)。
【0049】
ここで、親機3が、子機4から第2のパルス信号を受信すると、第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間)Tmを求め、子機4から応答情報を受信すると、光速をcとする次式(1)を用いて、親機3と子機4との間の通信機間距離Dを測定する。
【0050】
D=(Tm−Ts)c/2 …(1)
すなわち、親機3は、自機にて計測した待機時間Tmと応答情報が示す応答時間Tsとの差分をパルス信号の往復に要する伝播遅延時間とし、この伝播遅延時間を2で除算して片道分の伝播遅延時間を求め、これに光速cを乗算することにより、通信機間距離Dを算出する。
【0051】
このようにして、通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して、効率的に測距を行うようにしている。なお、ここでは、親機3が通信機間距離Dを算出する構成について説明したが、同様の原理によって、親機3が子機4に待機時間Tmを表す情報(待機情報)を、例えば応答時間要求フレームとともに送信し、この待機情報を受信した子機4が通信機間距離Dを算出するようにしてもよい。すなわち、親機3および子機4の少なくとも一方が通信機間距離Dを測定するように構成されていればよい。
【0052】
[通信測距装置の構成]
次に、図3は、本発明が適用された通信測距装置の構成を示すブロック図である。なお、本実施形態の通信測距装置は、前述の親機3としての機能と子機4としての機能とを有する通信機2として構成されている。
【0053】
具体的には、図3に示すように、通信測距装置5は、ZigBeeを利用して情報を送受信するための無線通信ユニット10と、無線通信ユニット10に後付けされてTWR方式を利用して測距を行うための測距ユニット20と、短距離無線通信(例えば100m以内程度の通信)と測距を行うためのアンテナ6と、アンテナ6の接続先を無線通信ユニット10と測距ユニット20とのいずれか一方に切り替えるための切替部7とを備えている。
【0054】
無線通信ユニット10は、測距ユニット20に対して各種信号の授受等を行う制御部11と、制御部11にて生成される送信データに対して各種処理を施して無線信号(制御フレーム)を生成するベースバンドプロセッサ(以下、BBPという)12と、BBP12が生成した無線信号を予め設定された周波数帯の信号にアップコンバートして、切替部7を介してアンテナ6へ出力する高周波回路13とを備える。
【0055】
BBP12は、制御部11から入力された送信データに符号化処理およびインターリーブ処理を施して符号列を生成した符号列(データ部)に、送信データの先頭(始まり)を示すプリアンブルやフレームの開始を示すSFD(Start of Frame Delimiter)、ヘッダ部を付加(挿入)し、これらが挿入された符号列(制御フレーム)に対応して搬送波を変調して、その搬送波からなる無線信号を高周波回路13に出力する。
【0056】
また、BBP12は、受信信号を直交復調してI成分及びQ成分を表すベースバンド信号を生成し、そのベースバンド信号に付加されているプリアンブルを検出して、プリアンブルに続くSFD、ヘッダ部、及びデータ部を復元するのに要する同期タイミングを設定する。そして、その同期タイミングで復調されたシンボルに復号化処理を施して、制御フレームを復元して制御部11に出力するように構成されている。
【0057】
また、高周波回路13は、BBP12から入力した無線信号をアップコンバートしてアンテナ6へ出力する他に、アンテナ6から切替部7を介して入力される受信信号を、信号処理に適した周波数帯の信号にダウンコンバートしてBBP12に出力するように構成されている。
【0058】
制御部11は、BBP12から入力された制御フレームを読み込むとともに、SFDの終了を検出したタイミングで制御信号(SFDタイミング信号(図4参照);第2のトリガ信号に相当)を測距ユニット20に出力するとともに、測距ユニット20から後述するカウンタ信号を入力し、このカウンタ信号に基づいて、通信機間距離Dを測定する測距処理(後述する)を行う。
【0059】
また、本実施形態の制御部11は、CSMA/CAといったアクセス制御に必要な処理を行うとともに、例えばアクセス制御によって通信が確立した他の通信機(通信相手)から、その通信相手に関する属性情報を受信すると、測距処理で測定した通信機間距離Dと対応づけて、その受信した属性情報を記憶する。
【0060】
なお、本実施形態の制御部11は、自装置に関する属性情報(例えば、自装置の種別や位置情報等)をデータ部に書き込み、通信相手に制御フレームを送信するための送信データをBBP12に出力する。そして、その出力後の所定のタイミングで制御信号(BBPタイミング信号;第1のトリガ信号に相当)を測距ユニット20に出力するように構成されている。なお、BBPタイミング信号は、SFDタイミング信号と同様のタイミングで生成されてもよい。
【0061】
[測距ユニット20]
測距ユニット20は、上記の測距処理に必要な情報を制御部11に供給するユニットであって、制御部11から入力されるSFDタイミング信号またはBBPタイミング信号に従って、測距信号やスイッチ切替信号などの制御信号を発生させる波形発生装置30(詳しくは後述する制御ロジック部40)と、測距を行うための測距信号を通信相手に送信する送信回路21と、通信相手から測距信号を受信する受信回路22と、切替部7の接続先(ひいてはアンテナ6の接続先)を送信回路21と受信回路22とのいずれか一方に切り替えるためのスイッチ部23と、受信回路22からの入力と波形発生装置30からの後述する受信ゲート信号との論理積を出力するAND回路24と、AND回路24からの入力に基づいて待機時間Tmおよび応答時間Tsを算出するためのカウンタ部25とを備えている。
【0062】
なお、測距信号には、無線通信ユニット10による制御フレームの送信終了後に出力される矩形波のパルス信号(以下、第1のパルス信号という)、無線通信ユニット10による制御フレームの受信終了後に出力される矩形波のパルス信号(以下、第2のパルス信号という)、及び、これらパルス信号の送信前に出力される無変調波としてのサンプル信号が含まれている。また、矩形波や無変調波はZigBeeの通信帯域と同じ帯域幅となるように帯域制限された波形を波形記憶用メモリ27に格納しているものとする。
【0063】
受信回路22には、サンプル信号の受信電力(RSSI)を検出し、そのRSSIが所定の目標範囲内になるよう利得調整をしながら増幅する自動利得制御(AGC)を行うAGC回路26を備えている。なお、AGC回路26は、波形発生装置30から出力されるレベルホールド信号によっても制御されており、ホールドの場合は、利得制御動作を止め、ホールド直前に設定された利得で待機する。
【0064】
そして、受信回路22は、規定の閾値を上回る受信電力(RSSI)を検出すると、その検出期間をハイレベルとして表すコンパレート信号をAND回路24に出力する。なお、コンパレート信号には、上記の電力閾値を上回るパルス信号に加えて、AGCを行っている間に上記の電力閾値を上回るサンプル信号に対応する検出信号も含まれる。
【0065】
波形発生装置30は、アンテナ6の接続先を無線通信ユニット10から測距ユニット20に切り替えるための第1の切替信号、アンテナ6の接続先を測距ユニット20から無線通信ユニット10に切り替えるための第2の切替信号、切替部7の接続先を受信回路22から送信回路21に切り替えるための第1のスイッチ信号、切替部7の接続先を送信回路21から受信回路22に切り替えるための第2のスイッチ信号、前述の測距信号、レベルホールド信号、及び、後述する受信ゲート信号といった各種信号の波形を記憶するメモリ27と、メモリ27から各種信号を読み出して、切替部7、スイッチ部23、送信回路21、AND回路24に必要な信号を出力する制御ロジック部40とを備えている。
【0066】
図5に示すように、受信ゲート信号は、第1のパルス信号、及び、第2のパルス信号の近傍でHiとなる信号である。このため、AND回路24によって第2のコンパレート信号だけが取り出され、カウンタ入力信号としてカウンタ部25に出力される。
【0067】
[親機としての機能]
次に、図6は、測距ユニット20における親機3としての機能を説明するためのタイミング図である。
【0068】
図6に示すように、制御ロジック部40は、通信相手に制御フレームを送信した無線通信ユニット10からBBPタイミング信号を入力すると、メモリ27から第1の切替信号を読み出して切替部7に出力すると共に、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を高周波回路13から送信回路21に切り替える。なお、本実施形態のBBPタイミング信号(SFDタイミング信号も同様)は、無線通信ユニット10と制御ロジック部40とを接続する信号線の状態が、ハイレベルからローレベルに切り替わることにより、無線通信ユニット10から制御ロジック部40に測距の開始タイミングを伝達する信号である。そして、無線通信ユニット10は、BBPタイミング信号(SFDタイミング信号も同様)の立下りエッジを検出することをトリガとして動作を開始する。
【0069】
次に、制御ロジック部40は、BBPタイミング信号の立下りエッジを検出してから予め設定された第1の送信時間α後に第1のパルス信号を送信するように、メモリ27からサンプル信号、第1のパルス信号を順に読み出して送信回路21に出力することにより、アンテナ6を介して通信相手に測距信号を送信する。
【0070】
なお、これらサンプル信号および第1のパルス信号は、スイッチ部23のアイソレーションレベルに応じた強度で送信回路21から受信回路22に回り込むようにされている。つまり、受信回路22は、その回り込みによって入力されたサンプル信号に基づいてAGCを行うと共に、コンパレータによって2値化された第1および第2のコンパレート信号をAND回路24に出力するように構成されている。
【0071】
そして、AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第1のパルス信号の送信タイミングを表す信号;以下、第1の送信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0072】
次に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第2のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を送信回路21から受信回路22に切り替える。
【0073】
そして、通信相手によって送信されてくる測距信号(第2のパルス信号を含む)を受信した受信回路22から、第1および第2のコンパレート信号をAND回路24に出力する。また、AND回路24は、同様にして、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第2のパルス信号の受信タイミングを表す信号;以下、第2の受信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0074】
最後に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第2の切替信号を読み出して切替部7に出力することにより、アンテナ6の接続先を受信回路22から無線通信ユニット10に切り替える。そして、カウンタ部25は、第1の送信タイミング信号が入力されてから第2の受信タイミング信号が入力されるまでの間の時間をカウント(算出)し、その算出結果(ひいては待機時間Tm)を制御部11に出力する。
【0075】
このようにして、測距ユニット20は、親機3の機能として、無線通信ユニット10が制御フレームを送信して無線相手からACKフレームを受信するまでの空白時間(例えば192μs)の間に、待機時間Tmを表す情報(待機情報)を制御部11に出力するようにしている。
【0076】
[子機としての機能]
次に、図7は、測距ユニット20における子機4としての機能を説明するためのタイミング図である。なお、前述の親機としての機能と重複する部分については説明を省略する。
【0077】
図7に示すように、制御ロジック部40は、通信相手から制御フレームを受信した無線通信ユニット10から入力されるSFDタイミング信号の立下りエッジを検出することをトリガとして動作を開始する。そして、動作が開始されると、メモリ27から第1の切替信号を読み出して切替部7に出力すると共に、メモリ27から第2のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を無線通信ユニット10から受信回路22に切り替える。
【0078】
そして、通信相手によって送信されてくる測距信号(第1のパルス信号を含む)を受信した受信回路22から、第1及び第2のコンパレート信号をAND回路24に出力する。また、AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第1のパルス信号の受信タイミングを表す信号;以下、第1の受信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0079】
次に、制御ロジック部40は、受信ゲート信号を所定期間だけAND回路24に出力すると、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力することにより、アンテナ6の接続先を受信回路22から送信回路21に切り替える。そして、SFDタイミング信号の立下りエッジを検出してから第1の送信時間αよりも長い時間として予め設定された第2の送信時間β後に第2のパルス信号を送信するように、メモリ27からサンプル信号、第2のパルス信号を順に読み出して送信回路21に出力することにより、アンテナ6を介して通信相手に測距信号を送信する。
【0080】
サンプル信号および第2のパルス信号は、スイッチ部23のアイソレーションレベルに応じた強度で送信回路21から受信回路22に回り込むようにされている。AND回路24は、受信ゲート信号とコンパレート信号との論理積として第2のコンパレート信号だけを取り出し、この第2のコンパレート信号(つまり、第2のパルス信号の送信タイミングを表す信号;以下、第2の送信タイミング信号という)をカウンタ入力信号としてカウンタ部25に出力する。
【0081】
最後に、制御ロジック部40は、所定期間だけ受信ゲート信号をAND回路24に出力すると、メモリ27から第1のスイッチ信号を読み出してスイッチ部23に出力すると共に、メモリ27から第2の切替信号を読み出して切替部7に出力することにより、アンテナ6の接続先を送信回路21から無線通信ユニット10に切り替える。そして、カウンタ部25は、第1の受信タイミング信号が入力されてから第2の送信タイミング信号が入力されるまでの間の時間をカウント(算出)し、その算出結果(ひいては応答時間Ts)を制御部11に出力する。
【0082】
このようにして、測距ユニット20は、子機4の機能として、無線通信ユニット10が制御フレームを受信して無線相手にACKフレームを送信するまでの空白時間(例えば192μs)の間に、応答時間Tsを表す情報(応答時間情報)を制御部11に出力するようにしている。
【0083】
[測距処理]
制御部11は、親機3の機能として制御フレームを通信相手に送信すると、測距ユニット20から入力される待機情報に基づいて、待機時間Tmを読み出す。そして、通信相手から応答時間が書き込まれたフレーム(図1に記載されている応答情報フレーム)を受信すると、そのフレームに含まれている応答時間情報に基づいて、応答時間Tsを読み出して、前述の(1)式により、通信機間距離Dを測定する。なお、制御部11は、通信相手からACKフレームを受信すると、通信機間距離Dを測定することに加えて、測距ユニット20から入力された待機情報を次回の制御フレームに書き込んで通信相手に送信する。
【0084】
また、制御部11は、子機4の機能として、測距ユニット20から入力される応答情報に基づいて、応答時間Tsを読み出す。そして、測距ユニット20から入力された応答時間情報をパケット(図1に記載されている応答情報フレーム)に書き込んで通信相手に送信する。次に、通信相手から制御フレームを受信すると、その制御フレームに含まれている待機情報に基づいて、待機時間Tmを読み出して、前述の(1)式により、通信機間距離Dを測定する。
【0085】
このようにして、本実施形態の制御部11は、親機3および子機4のいずれの機能によっても通信機間距離Dを測定するようにしている。
[本実施形態の効果]
以上説明したように、通信測距複合システム1では、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間としての待機時間Tmを算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間としての応答時間Tsを算出する。
【0086】
このため、通信測距複合システム1では、制御フレーム(あるいはACKフレーム)の送信タイミングや受信タイミングを正確に検出する必要がなく、第1の送信時間α(あるいは第2の送信時間β)にズレが生じた場合であっても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
【0087】
したがって、通信測距複合システム1によれば、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して、パルス信号を送受信することで、待機時間Tmと応答時間Tsとの差分(伝播遅延時間)に基づき、効率的かつ精度よく通信機間距離Dを測定することができる。
【0088】
また、通信測距装置5は、サンプル信号およびパルス信号を送信する際に、スイッチ部23のアイソレーションレベルに応じた強度でこれら信号が送信回路21から受信回路22に回り込むように構成され、且つ、受信回路22がこれら信号のうちサンプル信号に基づいてAGCを行い、受信ゲート信号とのANDによって送信信号からパルス信号だけを取り出すように構成されている。
【0089】
したがって、通信測距装置5によれば、AGCに必要なサンプル信号をパルス信号と共に送信する場合であっても、複雑なソフトウェア処理を必要とすることなく、簡易なハードウェアの構成によって、パルス信号の送信タイミングを精確に検出することができる。
【0090】
[本実施形態と特許請求の範囲との対応関係]
なお、本実施形態において、無線通信ユニット10が無線通信手段、波形発生装置30が信号制御部、カウンタ部25が時間算出部、測距処理が距離測定手段、AGC回路26がAGC手段に相当する。
【0091】
[変形例]
次に、無線通信ユニット10の制御部11が実行する測距処理の変形例を、図8のシーケンス図を用いて説明する。
【0092】
図8に示すように、制御部11は、親機3の機能として制御フレームを通信相手に送信すると、測距ユニット20から入力される待機情報に基づいて、前述の測距用通信回数(本実施形態では4回)に対応する待機時間Tm1〜Tm4を読み出す。そして、通信相手から応答時間が書き込まれたフレーム(図1に記載されている応答情報フレーム)を受信すると、そのフレームに含まれている応答時間情報に基づいて、4回分の応答時間Ts1〜Ts4を読み出して、前述の(1)式により、複数の通信機間距離D1〜D4を求め、これら通信機間距離D1〜D4の和を測距用通信回数(本実施形態では4回)で除算することにより、平均値としての通信機間距離Dを測定する。なお、制御部11は、通信相手からACKフレームを受信すると、通信機間距離Dを測定することに加えて、測距ユニット20から入力された待機情報を次回の制御フレームに書き込んで通信相手に送信する。
【0093】
また、制御部11は、子機4の機能として、測距ユニット20から入力される応答情報に基づいて、測距用通信回数(本実施形態では4回)に対応する応答時間Ts1〜Ts4を読み出す。そして、測距ユニット20から入力された応答時間情報をパケット(図1に記載されている応答情報フレーム)に書き込んで通信相手に送信する。次に、通信相手から制御フレームを受信すると、その制御フレームに含まれている待機情報に基づいて、4回分の待機時間Tm1〜Tm4を読み出して、前述の(1)式により、複数の通信機間距離D1〜D4を求め、これら通信機間距離D1〜D4の和を測距用通信回数(本実施形態では4回)で除算することにより、平均値としての通信機間距離Dを測定する。
【0094】
このようにして、本実施形態の制御部11は、親機3および子機4のいずれの機能によっても通信機間距離Dを測定するようにしている。なお、上記例では、複数の通信機間距離D1〜D4を測距用通信回数で単純に平均化することによって通信機間距離Dを算出しているが、制御フレームの送受信からACKフレームの送受信までのシーケンスを複数回行う場合、制御部11は、パルス信号の受信毎にAGC回路26にて検出されたRSSIに基づく重みを用いて、複数の通信機間距離D1〜D4(または伝播遅延時間)の加重平均を算出することにより、通信機間距離Dを算出してもよい。
【0095】
つまり、通信測距複合システム1では、上記の空白時間を利用して、子機4が間欠的に連続して複数の第2のパルス信号を送信し、その数に対応する複数の待機時間Tmおよび応答時間Tsが親機3および子機4によってそれぞれ算出されるため、一度のパケット通信によって複数の通信機間距離D1〜D4を算出することができる。
【0096】
[他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0097】
例えば、上記実施形態の通信測距装置5は、スイッチ部23のアイソレーションレベルに応じた強度でこれら信号が送信回路21から受信回路22に回り込むように構成しているが、これに限定されるものではなく、図9に示すように、制御ロジック部40から出力される測距信号と、AND回路24からの出力との論理和をカウンタ入力信号としてカウンタ部25に出力するOR回路を備えて構成してもよい。
【0098】
また、上記実施形態の通信測距装置5は、親機3としての機能と子機4としての機能とのいずれの機能も実現できるように構成されているが、これに限定されるものではなく、親機3または子機4の機能に特化させた構成であってもよい。
【0099】
また、上記実施形態の通信測距装置5では、カウンタ部25が待機時間Tmおよび応答時間Tsを算出するように構成されているが、これに限定されるものではなく、例えばカウンタ部25がカウンタ入力信号を制御部11に出力するようにし、制御部11がカウンタ入力信号に基づいて待機時間Tmおよび応答時間Tsを算出するように構成してもよい。
【0100】
また、上記実施形態の通信測距装置5では、制御部11がSFDタイミング信号およびBBPタイミング信号の出力、並びにアクセス制御を行うように構成されているが、これに限定されるものではなく、例えばBBP12がこれらの出力並びに制御を行うように構成してもよい。
【0101】
また、上記実施形態の通信測距複合システム1では、制御フレームの送受信とACKフレームの送受信との間の空白時間を利用して測距を行うようにしているが、これに限定されるものではなく、例えばRTSフレームの送受信とCTSフレームの送受信との間の空白時間を利用して測距を行うようにしてもよい。
【符号の説明】
【0102】
1…通信測距複合システム、2…通信機、3…親機、4…子機、5…通信測距装置、6…アンテナ、7…切替部、10…無線通信ユニット、11…制御部、12…ベースバンドプロセッサ(BBP)13…高周波回路、20…測距ユニット、21…送信回路、22…受信回路、23…スイッチ部、24…AND回路、25…カウンタ部、26…AGC回路、27…メモリ、30…波形発生装置、40…制御ロジック部。
【特許請求の範囲】
【請求項1】
短距離無線通信を行う複数の通信機のうち、情報発信源である通信機を親機、該親機に情報を返信する通信機を子機として、互いに情報を送受信する際の伝播遅延時間により、前記親機と前記子機との距離である通信機間距離を測定する通信測距複合システムにおいて、
前記親機から発信される情報を表す通信フレームを第1の通信フレーム、前記子機から前記親機に返信される情報を表す通信フレームを第2の通信フレームとして、
前記親機は、前記第1の通信フレームの送信終了後に矩形波のパルス信号である第1のパルス信号を送信すると共に、前記子機から該第1の通信フレームの受信終了後に送られてくる矩形波のパルス信号である第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出し、
前記子機は、前記親機から前記第1の通信フレームと前記第1のパルス信号とを受信すると、前記第2の通信フレームの返信前に前記第2のパルス信号を該親機に送信すると共に、前記第1のパルス信号の受信タイミングから該第2のパルス信号の送信タイミングまでの時間としての応答時間を算出し、
前記親機および前記子機の少なくとも一方は、前記待機時間と前記応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定することを特徴とする通信測距複合システム。
【請求項2】
前記第2の通信フレームには、前記子機による算出結果としての応答時間を示す情報が含まれており、
前記親機は、前記子機から前記第2の通信フレームを受信すると、当該親機による算出結果としての待機時間と該応答時間との差分を算出することにより、前記通信機間距離を測定することを特徴とする請求項1に記載の通信測距複合システム。
【請求項3】
前記親機および前記子機は、前記通信フレームと前記パルス信号とについて、同一の通信チャンネルを用いて送受信することを特徴とする請求項1または請求項2に記載の通信測距複合システム。
【請求項4】
前記親機は、前記子機から前記第2のパルス信号を受信する毎に前記待機時間を算出し、
前記子機は、前記親機から前記第1のパルス信号を受信する毎に前記応答時間を算出し、
前記親機および前記子機の少なくとも一方は、予め規定された測距用通信回数だけ前記パルス信号を連続的に送信すると共に、該測距用通信回数に対応する複数の前記伝播遅延時間を平均化することにより、前記通信機間距離を測定することを特徴とする請求項1ないし請求項3のいずれか1項に記載の通信測距複合システム。
【請求項5】
前記親機および前記子機の少なくとも一方は、前記パルス信号の受信毎に該受信電力を検出すると共に、該検出結果に基づく重みを用いて前記複数の伝播遅延時間の加重平均を算出することにより、前記通信機間距離を測定することを特徴とする請求項4に記載の通信測距複合システム。
【請求項6】
前記第1の通信フレームは、データフレームであり、
前記第2の通信フレームには、該データフレームの受信毎に前記子機から前記親機に返信するように予め規定された確認応答を示すACK情報が含まれていることを特徴とする請求項1ないし請求項5のいずれか1項に記載の通信測距複合システム。
【請求項7】
前記第1の通信フレームは、前記親機から前記子機へのデータ送信前の確認要求を示すRTSフレームであり、
前記第2の通信フレームには、該RTSフレームの受信毎にデータ受信が可能であれば前記子機から前記親機に返信するように予め規定された確認応答を示すCTS情報が含まれていることを特徴とする請求項1ないし請求項5のいずれか1項に記載の通信測距複合システム。
【請求項8】
短距離無線通信を行う装置であって、通信相手である通信機との間で互いに情報を送受信する際の伝播遅延時間により、該通信機と当該装置との距離である通信機間距離を測定する通信測距装置において、
情報発信源として前記通信機に送信する通信フレームを第1の通信フレーム、該第1の通信フレームの送信元である通信機に返信する通信フレームを第2の通信フレームとして、該第1及び第2の通信フレームを送受信すると共に、該第1の通信フレームの送信後に第1のトリガ信号、該第1の通信フレームの受信後に第2のトリガ信号をそれぞれ出力する無線通信手段と、
前記無線通信手段から前記第1のトリガ信号を入力すると、予め設定された第1の送信時間後に矩形波のパルス信号である第1のパルス信号を送信すると共に、前記無線通信手段から前記第2のトリガ信号を入力すると、前記第1の送信時間よりも予め長く設定された第2の送信時間後に矩形波のパルス信号である第2のパルス信号を送信する信号制御部と、
前記通信機から前記第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出すると共に、前記通信機から前記第1のパルス信号を受信すると、該第1のパルス信号の受信タイミングから前記第2のパルス信号の送信タイミングまでの時間としての応答時間を算出する時間算出部と、
前記通信機から前記応答時間を示す情報を受信すると、前記時間算出部にて算出した待機時間と該応答時間との差分を前記伝播遅延時間とし、前記通信機から前記待機時間を示す情報を受信すると、該待機時間と前記時間算出部にて算出した応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする通信測距装置。
【請求項9】
前記無線通信手段は、前記通信フレームの同期信号に基づいて、前記トリガ信号を生成することを特徴とする請求項8に記載の通信測距装置。
【請求項10】
前記パルス信号の受信前に該パルス信号と同一の振幅を有するサンプル信号を受信すると、該サンプル信号に基づいて自動利得調整を行うAGC手段を備え、
前記信号制御部は、前記パルス信号の送信前に前記サンプル信号を送信するように構成されており、
前記時間算出部は、予め設定された電力閾値を上回る受信電力を検出したタイミングを前記パルス信号の受信タイミングとして、前記待機時間および前記応答時間を算出することを特徴とする請求項8または請求項9に記載の通信測距装置。
【請求項11】
前記無線通信手段と前記距離測定手段とを少なくとも有するユニットを無線通信ユニット、前記信号制御部と前記時間算出部とを少なくとも有するユニットを測距ユニットとして、
前記短距離無線通信を行うためのアンテナと、
該アンテナの接続先を前記無線通信ユニットと前記測距ユニットとのいずれか一方に切り替えるための切替部とを備え、
前記信号制御部は、前記無線通信手段からトリガ信号を入力すると、前記切替部を介して前記アンテナの接続先を前記無線通信ユニットから前記測距ユニットに切り替えることを特徴とする請求項8ないし請求項10のいずれか1項に記載の通信測距装置。
【請求項12】
請求項1ないし請求項7のいずれか1項に記載の通信測距複合システムに用いられる親機であって、
前記第1の通信フレームの送信後に第1のトリガ信号を出力する無線通信手段と、
前記無線通信手段から前記第1のトリガ信号を入力すると、予め設定された第1の送信時間後に矩形波のパルス信号である第1のパルス信号を送信する信号制御部と、
前記子機から前記第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出する時間算出部と、
前記子機から前記応答時間を示す情報を受信すると、前記時間算出部にて算出した待機時間と該応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする親機。
【請求項13】
請求項1ないし請求項7のいずれか1項に記載の通信測距複合システムに用いられる子機であって、
前記第1の通信フレームの受信後に第2のトリガ信号を出力する無線通信手段と、
前記無線通信手段から前記第2のトリガ信号を入力すると、予め設定された第2の送信時間後に矩形波のパルス信号である第2のパルス信号を送信する信号制御部と、
前記親機から前記第1のパルス信号を受信すると、該第1のパルス信号の受信タイミングから前記第2のパルス信号の送信タイミングまでの時間としての応答時間を算出する時間算出部と、
前記親機から前記待機時間を示す情報を受信すると、該待機時間と前記時間算出部にて算出した応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする子機。
【請求項1】
短距離無線通信を行う複数の通信機のうち、情報発信源である通信機を親機、該親機に情報を返信する通信機を子機として、互いに情報を送受信する際の伝播遅延時間により、前記親機と前記子機との距離である通信機間距離を測定する通信測距複合システムにおいて、
前記親機から発信される情報を表す通信フレームを第1の通信フレーム、前記子機から前記親機に返信される情報を表す通信フレームを第2の通信フレームとして、
前記親機は、前記第1の通信フレームの送信終了後に矩形波のパルス信号である第1のパルス信号を送信すると共に、前記子機から該第1の通信フレームの受信終了後に送られてくる矩形波のパルス信号である第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出し、
前記子機は、前記親機から前記第1の通信フレームと前記第1のパルス信号とを受信すると、前記第2の通信フレームの返信前に前記第2のパルス信号を該親機に送信すると共に、前記第1のパルス信号の受信タイミングから該第2のパルス信号の送信タイミングまでの時間としての応答時間を算出し、
前記親機および前記子機の少なくとも一方は、前記待機時間と前記応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定することを特徴とする通信測距複合システム。
【請求項2】
前記第2の通信フレームには、前記子機による算出結果としての応答時間を示す情報が含まれており、
前記親機は、前記子機から前記第2の通信フレームを受信すると、当該親機による算出結果としての待機時間と該応答時間との差分を算出することにより、前記通信機間距離を測定することを特徴とする請求項1に記載の通信測距複合システム。
【請求項3】
前記親機および前記子機は、前記通信フレームと前記パルス信号とについて、同一の通信チャンネルを用いて送受信することを特徴とする請求項1または請求項2に記載の通信測距複合システム。
【請求項4】
前記親機は、前記子機から前記第2のパルス信号を受信する毎に前記待機時間を算出し、
前記子機は、前記親機から前記第1のパルス信号を受信する毎に前記応答時間を算出し、
前記親機および前記子機の少なくとも一方は、予め規定された測距用通信回数だけ前記パルス信号を連続的に送信すると共に、該測距用通信回数に対応する複数の前記伝播遅延時間を平均化することにより、前記通信機間距離を測定することを特徴とする請求項1ないし請求項3のいずれか1項に記載の通信測距複合システム。
【請求項5】
前記親機および前記子機の少なくとも一方は、前記パルス信号の受信毎に該受信電力を検出すると共に、該検出結果に基づく重みを用いて前記複数の伝播遅延時間の加重平均を算出することにより、前記通信機間距離を測定することを特徴とする請求項4に記載の通信測距複合システム。
【請求項6】
前記第1の通信フレームは、データフレームであり、
前記第2の通信フレームには、該データフレームの受信毎に前記子機から前記親機に返信するように予め規定された確認応答を示すACK情報が含まれていることを特徴とする請求項1ないし請求項5のいずれか1項に記載の通信測距複合システム。
【請求項7】
前記第1の通信フレームは、前記親機から前記子機へのデータ送信前の確認要求を示すRTSフレームであり、
前記第2の通信フレームには、該RTSフレームの受信毎にデータ受信が可能であれば前記子機から前記親機に返信するように予め規定された確認応答を示すCTS情報が含まれていることを特徴とする請求項1ないし請求項5のいずれか1項に記載の通信測距複合システム。
【請求項8】
短距離無線通信を行う装置であって、通信相手である通信機との間で互いに情報を送受信する際の伝播遅延時間により、該通信機と当該装置との距離である通信機間距離を測定する通信測距装置において、
情報発信源として前記通信機に送信する通信フレームを第1の通信フレーム、該第1の通信フレームの送信元である通信機に返信する通信フレームを第2の通信フレームとして、該第1及び第2の通信フレームを送受信すると共に、該第1の通信フレームの送信後に第1のトリガ信号、該第1の通信フレームの受信後に第2のトリガ信号をそれぞれ出力する無線通信手段と、
前記無線通信手段から前記第1のトリガ信号を入力すると、予め設定された第1の送信時間後に矩形波のパルス信号である第1のパルス信号を送信すると共に、前記無線通信手段から前記第2のトリガ信号を入力すると、前記第1の送信時間よりも予め長く設定された第2の送信時間後に矩形波のパルス信号である第2のパルス信号を送信する信号制御部と、
前記通信機から前記第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出すると共に、前記通信機から前記第1のパルス信号を受信すると、該第1のパルス信号の受信タイミングから前記第2のパルス信号の送信タイミングまでの時間としての応答時間を算出する時間算出部と、
前記通信機から前記応答時間を示す情報を受信すると、前記時間算出部にて算出した待機時間と該応答時間との差分を前記伝播遅延時間とし、前記通信機から前記待機時間を示す情報を受信すると、該待機時間と前記時間算出部にて算出した応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする通信測距装置。
【請求項9】
前記無線通信手段は、前記通信フレームの同期信号に基づいて、前記トリガ信号を生成することを特徴とする請求項8に記載の通信測距装置。
【請求項10】
前記パルス信号の受信前に該パルス信号と同一の振幅を有するサンプル信号を受信すると、該サンプル信号に基づいて自動利得調整を行うAGC手段を備え、
前記信号制御部は、前記パルス信号の送信前に前記サンプル信号を送信するように構成されており、
前記時間算出部は、予め設定された電力閾値を上回る受信電力を検出したタイミングを前記パルス信号の受信タイミングとして、前記待機時間および前記応答時間を算出することを特徴とする請求項8または請求項9に記載の通信測距装置。
【請求項11】
前記無線通信手段と前記距離測定手段とを少なくとも有するユニットを無線通信ユニット、前記信号制御部と前記時間算出部とを少なくとも有するユニットを測距ユニットとして、
前記短距離無線通信を行うためのアンテナと、
該アンテナの接続先を前記無線通信ユニットと前記測距ユニットとのいずれか一方に切り替えるための切替部とを備え、
前記信号制御部は、前記無線通信手段からトリガ信号を入力すると、前記切替部を介して前記アンテナの接続先を前記無線通信ユニットから前記測距ユニットに切り替えることを特徴とする請求項8ないし請求項10のいずれか1項に記載の通信測距装置。
【請求項12】
請求項1ないし請求項7のいずれか1項に記載の通信測距複合システムに用いられる親機であって、
前記第1の通信フレームの送信後に第1のトリガ信号を出力する無線通信手段と、
前記無線通信手段から前記第1のトリガ信号を入力すると、予め設定された第1の送信時間後に矩形波のパルス信号である第1のパルス信号を送信する信号制御部と、
前記子機から前記第2のパルス信号を受信すると、前記第1のパルス信号の送信タイミングから該第2のパルス信号の受信タイミングまでの時間としての待機時間を算出する時間算出部と、
前記子機から前記応答時間を示す情報を受信すると、前記時間算出部にて算出した待機時間と該応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする親機。
【請求項13】
請求項1ないし請求項7のいずれか1項に記載の通信測距複合システムに用いられる子機であって、
前記第1の通信フレームの受信後に第2のトリガ信号を出力する無線通信手段と、
前記無線通信手段から前記第2のトリガ信号を入力すると、予め設定された第2の送信時間後に矩形波のパルス信号である第2のパルス信号を送信する信号制御部と、
前記親機から前記第1のパルス信号を受信すると、該第1のパルス信号の受信タイミングから前記第2のパルス信号の送信タイミングまでの時間としての応答時間を算出する時間算出部と、
前記親機から前記待機時間を示す情報を受信すると、該待機時間と前記時間算出部にて算出した応答時間との差分を前記伝播遅延時間として、前記通信機間距離を測定する距離測定手段と、
を備えることを特徴とする子機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−112818(P2012−112818A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−262456(P2010−262456)
【出願日】平成22年11月25日(2010.11.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]