
通信装置
【課題】ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置を提供する。
【解決手段】他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づいて報知設定すると共に、前記信号機の現在の信号表示情報に基づいて報知部を制御して前記報知設定に基づく報知を行う制御部と、を備える。
【解決手段】他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づいて報知設定すると共に、前記信号機の現在の信号表示情報に基づいて報知部を制御して前記報知設定に基づく報知を行う制御部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置に関する。
【背景技術】
【0002】
近年、情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故や渋滞などといった道路交通問題の解決を目的とした高度道路通信システム(Intelligent Transport Systems、以下「ITS」という。)が研究、開発されている。ITSの中でも特に歩行者等の支援を扱う分野における歩行者向け無線通信の形態は路側機と歩行者が所有する通信装置(例えば携帯電話)との間で通信が行われる。
【0003】
路側機から通信装置に送信される情報は歩行者に対する経路案内や歩行者(特に高齢者や障害者等の交通弱者)の安全で円滑な歩行を支援することなどを目的とした情報であり、具体的には歩行者周辺の車両の状態を示す車両情報や、交差点・信号機に関する情報(交差点情報、信号機情報)が含まれる。そして各情報を活用して種々の制御を行う通信装置が提案されている。
【0004】
ところで、従来から視覚障害者の安全で円滑な歩行のために交差点において種々の支援がなされている。例えば、視覚障害者が安心して横断歩道を横断できるように信号機の信号表示が進行許可信号表示(青信号)であるときには音楽や一定の間隔で音を交差点全体に鳴らす等の音による支援が行われている。しかしながらこのような音による支援は信号機が設置されている全ての交差点で行われているわけではない。
【0005】
そこで、特許文献1に開示されている横断歩道の信号誘導方法は、横断歩道に対する利用者の現在位置に応じてその現在位置に関する信号を前記横断歩道の複数地点に予め埋め込まれた信号発生機から受信して読み取り、その読み取り信号を含む前記利用者の信号誘導に関するデータを短距離無線で前記横断歩道の信号機側に送信することにより前記利用者が前記横断歩道を渡れるように前記信号機を制御し、併せて前記信号機の信号制御に関するデータを前記短距離無線で前記利用者側に認知可能に送信している。
【0006】
これにより視覚障害者が安心して横断歩道を渡ることができることとしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−279584号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記先行技術文献に開示されている横断歩道の信号誘導方法は、信号発生機を路面に埋め込む必要があり、またユーザ端末(ユーザが携行している通信装置)が信号機側と通信を行うブルートゥース(登録商標)無線通信手段の他に当該信号発生機からの信号を受信する受信手段を備える必要があるためコストや手間がかかってしまう。
【0009】
また、ユーザの位置を確認するために信号発生機を使用している(ユーザが信号発生機の上に立つことによりユーザの位置が確認される)ので、ユーザが横断歩道の手前で停止しているが信号発生機上で停止していない場合や横断歩道に向かって歩いていて信号発生機まで達していない場合にはユーザの位置が確認できないという問題がある。
【0010】
さらに、信号機側は位置が確認できたユーザ端末ごとに通信を行うため、多数のユーザ端末が横断歩道付近に存在する場合には通信量や情報処理能力の限界によって全てのユーザ端末に対応しきれなくなる可能性がある。
【0011】
本発明は、上述した問題点に鑑み、ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために本発明の通信装置は、他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づく報知設定及び前記信号機の現在の信号表示情報に基づく報知を報知部を制御して行う制御部と、を備えることを特徴としている。
【0013】
また上記構成の通信装置において、前記制御部は、少なくとも前記信号機情報に基づいて報知対象判定の信号機を特定して、前記通信装置の進行方向の方位角と、前記報知対象判定の信号機の信号表示方向の方位角とから前記方位角差を算出することが望ましい。
【0014】
また上記構成の通信装置において、前記通信装置はさらに、前記通信装置の現在位置を検出する現在位置検出部を備え、前記制御部は、地図情報を取得して前記通信装置の現在位置から最も近い横断歩道の始点/終点ノードを特定し、前記報知判定対象の信号機は、特定された前記横断歩道の始点/終点ノードが、信号機に対応付けられた横断歩道の始点/終点ノードと一致する信号機であることが望ましい。
【0015】
また上記構成の通信装置において、前記通信装置はさらに、前記通信装置の現在位置を検出する現在位置検出部を備え、前記制御部は、地図情報を取得して前記通信装置の現在位置の属する歩道を特定し、前記報知判定対象の信号機は、特定された前記歩道が、信号機に対応付けられた歩道と一致する信号機であることが望ましい。
【0016】
また上記構成の通信装置において、前記制御部は、前記通信装置の進行方向の方位角と、前記信号機情報に含まれる信号機に対応付けられた信号表示方向の方位角とが対向方向又は同一方向であるかを判定し、前記報知判定対象の信号機は、信号機に対応付けられた信号表示方向の方位角が、前記通信装置の進行方向の方位角と対向方向又は同一方向である信号機であることが望ましい。
【0017】
また上記構成の通信装置において、前記通信部はさらに交差点情報を受信し、前記報知判定対象の信号機は、報知判定対象の交差点に設置された信号機であって、前記報知判定対象の交差点は、少なくとも前記通信装置の現在位置と前記交差点情報とに基づいて特定されることが望ましい。
【0018】
また上記構成の通信装置において、前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことが望ましい。
【0019】
また上記構成の通信装置において、前記所定の範囲は、複数の信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差に基づいて定められることが望ましい。
【0020】
また上記構成の通信装置において、前記制御部は前記報知判定対象の信号機が前方の信号機であるか否かを判定し、前記報知判定対象の信号機が前方の信号機でないときには報知を行わないことが望ましい。
【0021】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた音声出力部を介した音声案内であることが望ましい。
【0022】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた振動機能による振動であることが望ましい。
【0023】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた表示部への光又は色彩の表示であることが望ましい。
【0024】
また上記構成の通信装置において、前記報知設定は、前記報知の強弱であることが望ましい。
【発明の効果】
【0025】
本発明によると、通信装置は信号機の現在の信号表示情報に基づいて所定の態様で報知を行うのでユーザ(特に視覚障害者)が安心・安全に信号機を通過・通行できる。その際、方位角差に基づいて報知設定することにより、ユーザが信号機に対して正しい方向に移動しているか否かを知らせることができるので、より安心・安全に信号機が設置された交差点を通過・通行できる。
【図面の簡単な説明】
【0026】
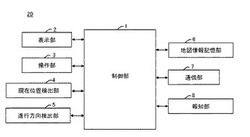
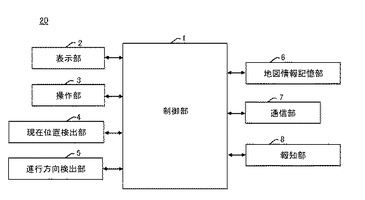
【図1】は、本発明の通信装置の構成を示すブロック図である。
【図2】は、本発明の通信装置の制御部が実行する処理の流れを示す第1のフローチャートである。
【図3】は、本発明の通信装置の制御部が実行する処理の流れを示す第2のフローチャートである。
【図4】は、本発明の通信装置の制御部が実行する処理の流れを示す第3のフローチャートである。
【図5】は、本発明の通信装置の制御部が実行する処理の流れを示す第4のフローチャートである。
【図6】は、本発明の実施形態に係る報知システムの構成例の模式図である。
【図7】は、本発明の実施形態に係る報知判定対象の信号機との角度差に基づく報知の強弱の設定例を示す第1の図である。
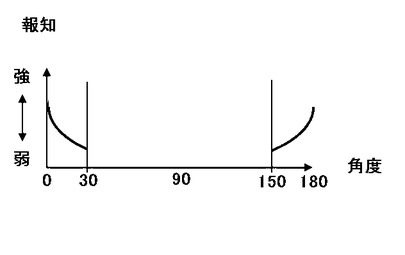
【図8】は、本発明の実施形態に係る報知判定対象の信号機との角度差に基づく報知の強弱の設定例を示す第2の図である。
【発明を実施するための形態】
【0027】
以下に本発明の実施形態について図面を参照して説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するために本発明の通信装置の一例を示すものであって、本発明をこの通信装置に特定することを意図するものではない。例えば、携帯電話等の移動通信端末であってもよい。なお、以下の説明では、通信装置をユーザが携行している場合を例示するが、車椅子や自転車、自動車等に取り付けられていてもよい。図1は本発明の通信装置の構成を示すブロック図である。通信装置20は制御部1と、表示部2と、操作部3と、現在位置検出部4と、進行方向検出部5と、地図情報記憶部6と、通信部7と、報知部8と、を備えている。
【0028】
制御部1は通信装置20全体を総括的に制御する制御手段である。制御部1はCPUとROMとRAM(いずれも不図示)とを含んでいる。ROMには制御部1が実行するプログラム、プログラムの実行に必要なパラメータやデータが記憶されている。CPUはROMに記憶されている各種プログラムを実行する。RAMは各種処理の過程で得られるデータや各種処理の結果得られるデータを一時的に格納する。これらCPU、RAM、ROM等は、バスを介して接続されている。なお、CPU、ROM及びRAMはこれらの一部または全部を1チップに集積化しても構わない。
【0029】
表示部2は地図画面(通信装置20の現在位置(ユーザが通信装置20を携行している場合には「ユーザの現在位置」と言い換えることができる、以下同じ)を示すマークなどを含む地図画像を表示する画面)やメニュー画面を表示するための表示手段である。
【0030】
操作部3はユーザが通信装置20の各種機能を利用するための操作手段である。なお、操作部3としては、通信装置本体に各種のキーやボタンを設けてもよいし、表示部2にタッチパネル機能を付加してもよい。また、操作部3として通信装置本体を遠隔操作するためのリモートコントローラを用いても構わない。
【0031】
現在位置検出部4は通信装置20の現在位置を検出するものであり、GPS受信機、自立航法手段、位置計算用CPU等を含んで構成される。自立航法手段は操角センサ、加速度センサ、距離センサや方位センサなどからなり、通信装置20の移動距離と進行方向とをそれぞれ検出し、これらの値に基づいて現在位置を求める。また、GPS受信機は複数のGPS衛星から送られてくる電波をGPSアンテナで受信して3次元測位処理又は2次元測位処理を行って通信装置20の絶対位置及び進行方向を計算する。ここで進行方向は現時点の位置と直前の位置とに基づいて計算される。
【0032】
進行方向検出部5は通信装置20の進行方向(移動方向)(ユーザが通信装置20を携行している場合には「ユーザの進行方向(移動方向)」と言い換えることができる、以下同じ)を検出する。進行方向の検出方法は特に限定されず、例えば現時点の位置と直前の位置とに基づいて計算される。また、通信装置20が停止している場合には、直前の進行方向(停止する前に移動していた時点における位置とその直前の位置とに基づいて計算される進行方向)が停止時の進行方向として検出される。なお、方位センサを用いて検出することとしてもよいが、ユーザが通信装置20を携行している場合には、通信装置20が実際の進行方向(ユーザが現に歩いている方向)を向いているか否かが定かではないため、上述のように実際の進行方向を算出できる方法を用いることが望ましい。なお、上述のように現在位置検出部4が通信装置20の現在位置に加えて進行方向を検出することができる場合には進行方向検出部5を別途設けない構成としてもよい。なお、後述する通信装置20の進行方向の方位角とは、進行方向を方位に基づいて角度で現したものであり、本実施形態においては、北を基準とした角度で表現し、北が0度(360度)、東が90度、南が180度、西が270度と定める。なお、進行方向の方位角は、方位センサの出力に基づいて算出される他、北を基準とした相対方位に基づいて算出されてもよい。
【0033】
地図情報記憶部6は現在位置のマップマッチング処理を行うときなどに参照される地図情報が記憶されている。地図情報には、ネットワークデータ(ノードデータ、リンクデータ)が含まれる。地図情報記憶部6としてはNANDフラッシュやSDメモリカードなどを好適に用いることができる。地図情報記憶部6は通信装置20に内蔵しても構わないし、通信装置20に着脱可能な構成としても構わない。なお、地図情報には、地図画像が含まれていてもよいし、地図情報に含まれるネットワークデータ(ノードデータ、リンクデータ)に基づき地図画像を表示部2に描画してもよい。また、地図情報は予め地図情報記憶部6に記憶される以外にも、後述する通信部7が路側機などから地図情報を受信し、受信された地図情報が地図情報記憶部6に記憶されてもよい。
【0034】
ここで、地図情報はネットワークデータを含み、ネットワークデータには、道路や歩道をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。
【0035】
ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、道路種別/歩道種別、交差点情報や交差点名称などを示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0036】
また、リンクデータは、リンクの始点及び終点となるノード番号、道路種別/歩道種別(一般道路、高速道路、一般歩道、歩行者専用道路、横断歩道、横断歩道橋など)、距離及び/又は所要時間等を含むリンクコスト、国道○号線のような道路名称、進行方向のデータを含んで構成される。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0037】
本発明においては、ネットワークデータに、横断歩道のノードデータ・リンクデータが含まれる。現在位置検出部4によって検出される通信装置20の現在位置と地図情報とに基づき、制御部1がマップマッチング処理を行う。
【0038】
なお、マップマッチング処理については、制御部1が行なってもよいが、現在位置検出部4が行なってもよい。すなわち、GPS受信機及び/又は自律航法手段を用いて検出した現在位置と地図情報とに基づき、マップマッチング処理を行い、マップマッチング処理を行なった現在位置を現在位置として制御部1へ出力してもよい。或いは、制御部1のマップマッチング処理までを含めて現在位置検出部4としてもよい。
【0039】
通信部7は通信装置20と通信可能な他の通信装置(以下、「他の通信装置」という。)に情報を送信する送信部(図示せず)と他の通信装置から送信される情報を受信する受信部(図示せず)とを有する。通信方法は無線通信や赤外線通信などの非接触通信とすることが好ましい。他の通信装置としては路側機、車両に搭載されたナビゲーション装置等の車載装置、歩行者が所持する携帯電話等の移動通信端末などを挙げることができる。通信部7が路側機から受信する情報には交差点情報と信号機情報が含まれる。このとき通信部7は、単一の交差点情報や信号機情報を受信するのではなく、複数の交差点毎の交差点情報及び信号機情報を受信してもよい。
【0040】
ここで、通信部7が受信する交差点情報及び信号機情報について説明を行なう。なお、以下の説明では、信号機が設置された交差点毎に路側機が設置され、路側機から、当該路側機が設置された交差点の情報(交差点情報)及び当該路側機が設置された交差点に設置された信号機(車両用信号機及び歩行者用信号機)の情報(信号機情報)を含む情報が送信されるものとする。
【0041】
交差点情報には、例えば、交差点の位置(緯度・経度)や路側機(交差点)を識別する情報などが含まれる。
【0042】
信号機情報には車両用信号機の信号機情報と歩行者用信号機の信号機情報とが含まれており、特に歩行者用信号機の信号機情報には、信号機を識別するための識別情報(信号機番号)、信号機の位置(緯度、経度)、信号機に対応付けられた歩道を示す情報(どの歩道に存在する歩行者に対する信号表示であるかを示す情報)、信号機に対応付けられた横断歩道の始点/終点ノードを示す情報(どの始点/終点ノードに存在する歩行者に対する信号表示であるかを示す情報)、信号機に対応付けられた信号表示方向情報(信号機の信号表示方向の方位角を示す情報)、信号機の現在の信号表示情報(信号機の表示色を示す情報)、次の信号表示情報及び該信号表示に変更されるまでの時間等の情報が含まれる。なお、交差点に複数の信号機が設置されている場合には、信号機情報には、信号機毎に信号機の現在の信号表示情報などの情報が含まれている。一般に方位角とは、北を基準とした角度で表現され、北が0度(360度)、東が90度、南が180度、西が270度と定められている。従って、以下の実施形態においては上記基準に基づいて方位角を記載するものとする。
【0043】
報知部8は所定の態様で各種情報を報知する。報知の態様は特に制限されないが、視覚障害者が安心・安全に横断歩道を横断できるように支援をするのに適した態様であることが望ましく、例えばスピーカ(不図示)を介して所定の音声を出力することや、振動機能(バイブレーション機能)により通信装置20を所定の振動方法で振動させることにより行われる。また、近距離における光覚や色覚を有する視覚障害者のために表示部2に所定の輝度の光や所定の色彩(青色や赤色)を表示することとしてもよく、或いはこれらを組み合わせ、或いは同時に行うこととしてもよい。説明の簡略化のために報知部8と表示部2を別の構成として設けているが、報知方法が表示部2への所定の表示を含む場合には報知部8が表示部2を含む構成として設けてもよい。
[第1実施形態]
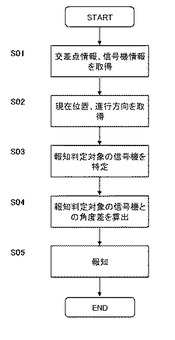
本発明の通信装置20の第1実施形態について図2を用いて説明する。図2は本発明の通信装置20の制御部1が実行する処理の流れを示す第1のフローチャートである。
【0044】
ステップS01において制御部1は通信部7を介して交差点情報及び信号機情報を取得する。次にステップS02において制御部1は現在位置検出部4によって検出される通信装置20の現在位置と、現在位置検出部4や進行方向検出部5により検出される通信装置20の進行方向とを取得する。
【0045】
なお、本実施形態において制御部1は、ステップS01において交差点情報及び信号機情報を取得し、ステップS02において通信装置20の現在位置と進行方向を取得しているが、制御部1がこれらの情報を取得する順番はフローチャートに示した順序でなくてもよく、例えば同時に取得するものであってもよいし、先に現在位置と進行方向を取得するものであってもよい。
【0046】
また、制御部1が現在位置と進行方向、及び、交差点情報と信号機情報を取得するタイミングは当該タイミングとは限られない。定期的或いは不定期(例えば、他の通信装置の送信タイミングに基づいて)に取得されてもよく、定期的或いは不定期に複数回情報を取得する場合には、取得された情報のうち最も新しい情報を使用することとしてもよい。
【0047】
ステップS03において制御部1は報知判定対象の信号機を特定する。報知判定対象の信号機を特定する方法について以下詳説する。
【0048】
報知判定対象の信号機を特定する第1の方法は、通信装置20の現在位置と地図情報と横断歩道の始点/終点ノードの位置座標とに基づいて特定する方法である。すなわち、前述の通り地図情報には、横断歩道のノードデータ・リンクデータ(始点/終点ノードを含む)が含まれている。そして、横断歩道のノードデータには、横断歩道の始点/終点ノードの位置座標(緯度・経度)を示す情報が含まれている。
【0049】
そこで制御部1はまず、通信装置20の現在位置から最も近い横断歩道の始点/終点ノードを特定する。通信装置20の現在位置から横断歩道の始点/終点ノードまでの距離は、通信装置20の現在位置の座標(緯度・経度)と横断歩道の始点/終点ノードの位置座標(緯度・経度)とを結ぶ直線の距離(すなわち、直線距離)としてもよいし、道路環境を考慮に入れた最短距離(例えば通信装置20の現在位置の座標(緯度・経度)と横断歩道の始点/終点ノードの位置座標(緯度・経度)とを結ぶ直線上に建築物等の通過できない障害物がある場合には、当該障害物を迂回するルートであって且つ最短の距離となるルート)としてもよい。そして、現在位置から最も距離の短い横断歩道の始点/終点ノードを現在位置から最も近い横断歩道の始点/終点ノードとする。
【0050】
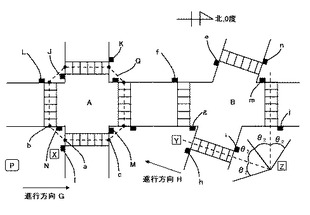
なお、横断歩道は歩行方向(進行方向)が定まっておらず、その両端においていずれが始点となり、いずれが終点となるか定まっていないため本実施形態では「始点/終点」ノードと記載しているが、特定されるノードは一箇所であり、図6の模式図を参照すると、地点Xに通信装置20を携行するユーザがいる場合には、ノードaが通信装置20の現在位置から最も近い横断歩道の始点/終点ノードとして特定される。
【0051】
次に、特定された横断歩道の始点/終点ノード(例えば、図6におけるノードa)と通信部7が受信した信号機情報に含まれる信号機に対応付けられた横断歩道の始点/終点ノードとが一致する信号機(例えば、図6における信号機M)を報知判定対象の信号機と特定する。なお、信号機Iと信号機Mは同一の横断歩道上に設置されているが、ノードaは信号機Iに対応付けられた横断歩道の始点/終点ノードではない。前述の通り「信号機に対応付けられた始点/終点ノード」とは、信号機の信号表示がどの始点/終点ノードに存在するユーザに対する信号表示であるかに基づいて定められている始点/終点ノードであり、ノードaに存在するユーザに対して信号表示を行う信号機は信号機Mのみに限定される(信号機Iはノードcに存在するユーザに対して信号表示を行う信号機であって、ノードaに存在するユーザに対して信号表示を行う信号機ではない。)。
【0052】
なお、第1の方法では、地図情報に含まれる始点/終点ノードのうち最も近い横断歩道の始点/終点ノードを特定し、特定した横断歩道の始点/終点ノードと、通信部7が受信した信号機情報に含まれる横断歩道の始点/終点ノードとが一致した場合、当該始点/終点ノードに対応付けられた信号機を報知判定対象の信号機と特定したが、地図情報に横断歩道の始点/終点ノードがなくとも、受信した横断歩道の始点/終点ノードのうち最も近い横断歩道の始点/終点ノードを特定し、特定した横断歩道の始点/終点ノードに対応付けられた信号機を報知判定対象の信号機と特定してもよい。
【0053】
報知判定対象の信号機を特定する第2の方法は、通信装置20の現在位置と歩道とに基づいて特定する方法である。すなわち、前述の通り地図情報には、一般歩道等の歩道種別を示す情報が含まれている。なお、この歩道種別は、道路を挟んで異なる種別が割り当てられるものとする。そこで制御部1はまず、通信装置20の現在位置(例えば、図6における地点X)の属する(ユーザが歩行或いは停止している)歩道を特定する(例えば、図6における一般歩道P)。
【0054】
次に、特定された歩道と通信部7が受信した信号機情報に含まれる信号機に対応付けられた歩道とが一致する信号機(例えば、図6における信号機L及び信号機M)を報知判定対象の信号機と特定する。
【0055】
よって、報知判定対象の信号機を特定する第2の方法によれば報知判定対象の信号機が一つに特定されない場合があるが、後述するように通信装置20の進行方向の方位角と信号機の信号表示方向の方位角との方位角差に基づいて報知の強弱を設定するので歩行者支援に反するものとはならない。また、後述する第3の方法と組み合わせることによって報知判定対象の信号機を一つに特定することができる。
【0056】
なお、前述の通り、「信号機に対応付けられた歩道」とは、どの歩道に存在する歩行者に対する信号表示であるかに基づいて定められた歩道である。従って、信号機Nと信号機Iは歩道Pに設置されている(信号機が歩道に設置されていない場合には「信号機に対応付けられた歩道」であるか否かについて疑義が生じないため、信号機が歩道に設置されている場合を例に説明しているが、本実施形態や以下の実施形態において信号機が歩道に設置されているか否かは問われない。)が、歩道Pに存在する歩行者に対する信号表示ではないため報知判定対象の信号機として特定されることはない。
【0057】
なお、信号機に対応付けられた歩道を示す情報の「歩道」とは、例えば、ある範囲のことであってもよく、例えば、4点の位置座標や、特定の位置座標及び半径などからなる。受信したこの4点の位置座標などにより特定される範囲内に現在位置が含まれる場合に、この範囲(歩道)に対応付けられた信号機を報知判定対象の信号機として特定する。(例えば、図6における信号機L及び信号機M)
報知判定対象の信号機を特定する第3の方法は、通信装置20の進行方向の方位角と信号機の信号表示方向の方位角とに基づいて特定する方法である。すなわち、前述の通り信号機情報には信号機に対応付けられた信号表示方向情報が含まれている。そこで制御部1は通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが対向する信号機を報知判定対象の信号機と特定する。
【0058】
例えば図6の模式図を参照して通信装置20の進行方向が進行方向Gであるときは、進行方向の方位角が0度であるため、信号表示方向の方位角が対向する(すなわち、信号表示方向の方位角が180度である)信号機M及び信号機Kが報知判定対象の信号機と特定される。上記報知判定対象の信号機を特定する第2の方法と同様に報知判定対象の信号機が一つに特定されない場合があるが、信号機Mと信号機Kの信号表示(例えば青信号)のサイクルやタイミングが共通する場合には、いずれの現在の信号表示情報に基づいて報知を行ってもよいため報知判定対象の信号機を一つに特定する必要はない。
【0059】
一方、信号機Mと信号機Kの信号表示(例えば青信号)のサイクルやタイミングが異なる場合には、上記報知判定対象の信号機を特定する第2の方法と組み合わせることによって報知判定対象の信号機を一つに特定することが望ましい。
【0060】
なお、報知判定対象の信号機を特定する第3の方法においては通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが対向する信号機を報知判定対象の信号機と特定しているが、通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが一致する(同一である)信号機(例えば、図6における信号機I及び信号機J)を報知判定対象の信号機と特定してもよい。なぜなら、同一横断歩道における信号表示方向の方位角が対向する信号機(例えば図6における信号機Iと信号機M)は信号表示のサイクルやタイミングが共通しているからである。なお、これは報知判定対象の信号機を特定する第1の方法及び第2の方法も同様である。
【0061】
なお、「方向が対向する」とは、通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角との方位角差(以下、「信号機との方位角差」という。)が180度であることをいい、「方向が一致する(同一である)」とは信号機との方位角差が0度である(方位角が共通している)ことをいうが、いずれも所定の誤差を設けることとしてもよく、例えば「方向が対向する」とは信号機との方位角差が150度〜180度であることとし、また、「方向が一致するとは」信号機との方位角差が0度〜30度であることとしてもよい。
【0062】
例えば、通信装置20の進行方向の方位角が10度であり、信号機に対応付けられた信号表示方向の方位角が180度である場合には、信号機との方位角差は170度であり、上述のように「方向が対向する」が、信号機との方位角差が150度〜180度であることである場合には、当該信号機に対応付けられた信号表示方向の方位角は通信装置20の進行方向の方位角に対向するものであるため当該信号機が報知判定対象の信号機として特定される。
【0063】
なお、本実施形態及び以下の実施形態において方位角差は、「0度≦方位角差≦180度」となるように算出されるが(方位角差の算出方法については後述する)、これは説明の便宜上、範囲を制限したものであって、本発明における方位角差は当該範囲に制限されるものではなく、例えば、方位角差が「0度≦方位角差≦360度」となるように算出されるものであってもよい。その場合、上記所定の誤差として例示した範囲は、「方向が対向する」とは信号機との方位角差が150度〜210度であることとなり、また、「方向が一致するとは」信号機との方位角差が0度〜30度又は330度〜360度であることとなる。
【0064】
ステップS04において制御部1は、通信装置20の進行方向の方位角と報知判定対象の信号機の信号表示方向の方位角との方位角差(以下、「報知判定対象の信号機との方位角差」という。)を算出する。
【0065】
報知判定対象の信号機との方位角差は、通信装置20の進行方向の方位角と、報知判定対象の信号機の信号表示方向の方位角とに基づいて「0度≦方位角差≦180度」となるように算出される。以下、報知判定対象の信号機を例に方位角差の算出方法について説明するが、ステップS03における信号機との方位角差も同様の方法で算出するものとする。
【0066】
報知判定対象の信号機との方位角差を算出する第1の方法は、通信装置20の進行方向の方位角に延びるベクトルと、報知判定対象の信号機の信号表示方向の方位角に延びるベクトルとを算出し、二つのベクトルのなす角を方位角差とする方法である。
【0067】
二つのベクトルは二つの角を形成し(ベクトルは向き(方向)を持っており、二つのベクトルのなす角とは、二つのベクトルの交点を中心としてそれぞれの方向へ向かう二つの線分のなす角と言い換えることができるため、二つのベクトルは二つの角を形成する。)、二つの角としては共に180度である場合と、一方が180度を越える角であり他方が180度未満の角である場合とがある。本実施形態においては180度以下の角を報知判定対象の信号機との方位角差として算出するものとする。これにより、「0度≦方位角差≦180度」となる。
【0068】
報知判定対象の信号機との方位角差を算出する第2の方法は、通信装置20の進行方向の方位角から、報知判定対象の信号機の信号表示方向の方位角を引いた値(報知判定対象の信号機の信号表示方向の方位角から、通信装置20の進行方向の方位角を引いた値でもよい)の絶対値を算出し、当該絶対値が180度以下であるときは当該絶対値を報知判定対象の信号機との方位角差とし、当該絶対値が180度を超えるときは360度から当該絶対値を引くことによって算出される値を報知判定対象の信号機との方位角差とする方法である。これにより、「0度≦方位角差≦180度」となる。本実施形態及び以降の実施形態においては、報知判定対象の信号機との方位角差を算出する第2の方法により報知判定対象の信号機との方位角差を算出するものとする。
【0069】
例えば通信装置20の進行方向の方位角が10度であり、報知判定対象の信号機の信号表示方向の方位角が320度であるときに、上記方位角差を算出する第2の方法により報知判定対象の信号機との方位角差を算出すると、通信装置20の進行方向の方位角から、報知判定対象の信号機の信号表示方向の方位角を引いた値の絶対値は310度であり、180度を超えるため、360度から310度を引いた50度が報知判定対象の信号機との方位角差となる。
【0070】
なお、上述のステップS03において報知判定対象の信号機を特定する際に信号機との方位角差を算出しているとき(特に上述の報知判定対象の信号機を特定する第3の方法により報知判定対象の信号機を特定したとき)はステップS03で算出した信号機との方位角差を報知判定対象の信号機との方位角差として取得することとしてもよい。
【0071】
そしてステップS05において制御部1は、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。
【0072】
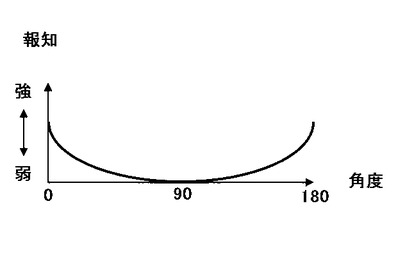
報知判定対象の信号機との方位角差に基づく強弱の設定は、例えば図7のように設定される。このように報知判定対象の信号機との方位角差に基づいて報知の強弱を異なるようにすると、報知判定対象の信号機が一つに特定されている場合には、進行方向の正しさが分かり、より強く通信装置20が振動する方向に進行方向を変えることによって安心・安全に横断歩道を横断することができる。
【0073】
なお、図7の方位角差に基づく強弱の設定は、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合の設定である。そして、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合において、報知判定対象の信号機との方位角差が180度の場合(図7参照)であるとき、すなわち、ユーザが向いている方向(ユーザの進行方向)に報知判定対象の信号機があるときに、強く(大音量で)報知が行なわれる。その一方、報知判定対象の信号機との方位角差が90度に近づくにつれ、すなわち、ユーザが向いている方向(ユーザの進行方向)が報知判定対象の信号機でなくなっていくにつれ、報知が弱く(小さく)なっていく。なお、図7では、信号機との方位角差が0度の場合も、強く(大音量で)報知が行なわれるが、方位角差が0度の場合であれば、信号機から遠ざかる場合が考えられるため、報知しないようにしてもよい。
【0074】
なお、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合にのみ報知する場合であれば、報知判定対象の信号機の現在の信号表示が進行不許可信号表示(赤信号)であれば、方位角差に基づく強弱の設定に関係なく報知されない。但し、報知判定対象の信号機の現在の信号表示が進行不許可信号表示(赤信号)である場合においても、「赤信号です。」などの報知を行なう場合であれば、方位角差に基づく強弱の設定を用いてもよい。
【0075】
一方、報知判定対象の信号機が一つに特定されていない場合(特に上記報知判定対象の信号機を特定する第3の方法の場合)には、ユーザがどの横断歩道を横断するかを決めていない(例えば二つの横断歩道のどちらを横断しても目的地に辿り着ける場合)等の場合に、複数の横断歩道の信号表示を知ることができる。
【0076】
図6に基づいて具体的に説明すると、地点Xにユーザがいる場合は、上記報知判定対象の信号機を特定する第1の方法によれば通信装置20は信号機Lの現在の信号表示情報に基づいて報知を行うことがなく、信号機Lの現在の信号表示を知りたいときには通信装置20の現在位置から最も近いノードがノードbとなるように移動する必要がある。これに対し上記報知判定対象の信号機を特定する第3の方法によればユーザが信号機Lの方向に移動する(或いは、信号機Lの方向に体を向ける)だけで信号機Lの現在の信号表示が分かる(例えば現在の信号表示が青信号であれば振動し、現在の信号表示が赤信号であれば振動しない。)。なお、例えば信号機Mと信号機Kなどの平行する信号機の信号表示(例えば青信号)のサイクルやタイミングが共通する場合では、報知判定対象の信号機を特定する第3の方法のみを用いて、ユーザの進行方向を変更に応じて複数の横断歩道の信号表示を知ることができる。
【0077】
その際、報知判定対象の信号機との方位角差に基づいて報知の強弱を異なるようにするので、進行方向を変更したときの進行方向の正しさが分かり、より強く通信装置20が振動する方向に進行方向を変えることによって安心・安全に横断歩道を横断することができる。(進行許可信号表示(青信号)時に振動する場合)
報知の態様は特に制限されないが前述の通り、振動機能、音声案内、表示部2への表示が例示される。振動機能により報知する場合には、振動と報知判定対象の信号機との方位角差に基づく振動の強弱(振動の大きさ)による報知や、所定間隔の振動と報知判定対象の信号機との方位角差に基づく振動間隔の強弱(振動間隔の長さ、短さ)による報知などが考えられる。音声案内により報知する場合には、所定の音と報知判定対象の信号機との方位角差に基づく音量の強弱(音量の大きさ、小ささ)による報知や、所定間隔の音と報知判定対象の信号機との方位角差に基づく音が鳴る間隔の強弱(音が鳴る間隔の長さ、短さ)による報知などが考えられる。所定の音は、テストトーンのような単調な音(単一周波数の正弦波信号)のみならず、例えば「青信号です。」のように一定の意味を有する音(音声)であってもよい。表示部2への表示により報知する場合には、例えば「青信号です。」という文字を表示部2に表示するものであってもよいが、本発明は特にユーザが視覚障害者である場合に効果を奏するため、表示部2への表示は限定されると考えられる。例えば近距離における光覚や色覚を有する視覚障害者のために、所定の光と報知判定対象の信号機との方位角差に基づく光の輝度の強弱による報知や、所定の色彩と報知判定対象の信号機との方位角差に基づく色彩の強弱(濃淡或いは明暗)による報知などが考えられる。
【0078】
本実施形態によれば、通信装置20は報知判定対象の信号機の現在の信号表示情報に基づいて所定の態様で報知を行うのでユーザ(特に視覚障害者)が安心・安全に横断歩道を横断できる。その際、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定することにより、ユーザが横断歩道に対して或いは横断歩道上を正しい方向に歩いているか否かを知らせることができるので、より安心・安全に横断歩道を横断できる。
[第2実施形態]
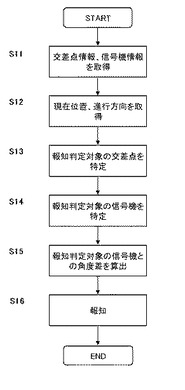
本発明の通信装置20の第2実施形態について図3を用いて説明する。図3は本発明の通信装置20の制御部1が実行する処理の流れを示す第2のフローチャートである。なお、本実施形態のステップS11〜ステップS12は第1実施形態のステップS01〜ステップS02と、また、本実施形態のステップS14〜ステップS16は第1実施形態のステップS03〜ステップS05は同様であるため説明を省略する。
【0079】
ステップS13において制御部1は報知判定対象の交差点を特定する。通信装置20と通信可能な路側機が設置された交差点が1つしかない場合には第1実施形態のように報知判定対象の交差点を特定することなく報知判定対象の信号機を特定すればよい(或いはその交差点が自動的に報知対象の交差点として特定される)が、通信装置20と通信可能な路側機が設置された交差点が複数ある場合には報知判定対象の交差点を特定し、その交差点に設置された信号機のいずれかを報知判定対象の信号機と特定することが望ましいからである。なお、ITSにおいて無線通信を行なう際の周波数帯域は700MHz帯の周波数帯域であると考えられている。その場合、通信可能範囲は約300メートルであり、通信装置20は自身を中心として半径約300メートルの範囲内に存在する1又は2以上の路側機から交差点情報を受信する。
【0080】
報知判定対象の交差点を特定する方法について以下詳説する。
【0081】
報知判定対象の交差点を特定する第1の方法は、通信装置20の現在位置と交差点の中心地点の位置座標とに基づいて特定する方法である。すなわち、前述の通り交差点情報には交差点の中心地点の位置座標(緯度・経度)を示す情報が含まれている。そこで制御部1は通信装置20の現在位置から交差点の中心地点までの距離が最も近い交差点を報知判定対象の交差点と特定する。
【0082】
報知判定対象の交差点を特定する第2の方法は、通信装置20の現在位置及び進行方向と交差点に含まれる全ての座標とに基づいて特定する方法である。すなわち交差点が複数個所ある場合においてユーザは、渡りたい横断歩道がある交差点に向かって歩いているものと考えられ、そのような場合に交差点の中心地点の位置座標までの距離の如何を問わずに報知判定対象の交差点を特定するものである。例えば図6において地点Yにユーザがいるときに、交差点の中心地点までの座標は交差点Aよりも交差点Bのほうが近いが、ユーザが進行方向Hの方向に歩いているときには交差点Aが報知判定対象の交差点と特定される。
【0083】
なお、報知判定対象の交差点を特定する第2の方法においては交差点に含まれる全ての座標に基づいて報知対象の交差点を特定しているが、これは、ユーザが交差点に向かって歩く際に交差点の中心地点に向かって歩くとは限られておらず、むしろ横断歩道に向かって歩くことが多いと考えられるからである。
【0084】
交差点に含まれる全ての座標とは図6において破線Qで示すような横断歩道を含む領域に含まれる座標であり、当該領域は例えば交差点に存在する(一つの交差点に設置された複数の信号機に対応付けられた)各横断歩道の始点/終点ノードを結んでなる領域である。そして制御部1は通信装置20の現在位置から通信装置20の進行方向の方位角に延びるベクトルが交差点に含まれる全ての座標のうち、少なくとも1点の座標を通過する場合に、その交差点を報知判定対象の交差点と特定する。
【0085】
なお、通信装置20の進行方向の方位角に延びるベクトルが2箇所以上の交差点を通過することにより報知判定対象の交差点が一つに特定できない場合には、さらに上記報知判定対象の交差点を特定する第1の方法と組み合わせることにより、報知判定対象の交差点を一つに特定することができる。
【0086】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機を報知判定対象の交差点に設置された信号機の中から特定するので、通信装置20と通信可能な路側機が複数存在する場合であっても適切に報知することできる。
【0087】
[第3実施形態]
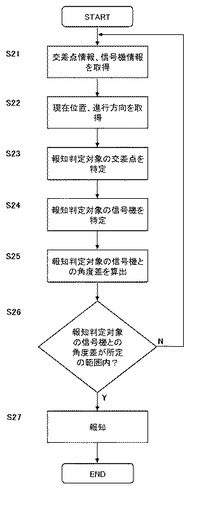
本発明の通信装置20の第3実施形態について図4を用いて説明する。図4は本発明の通信装置20の制御部1が実行する処理の流れを示す第3のフローチャートである。なお、本実施形態のステップS21〜ステップS25は第2実施形態のステップS11〜ステップS15と、また、本実施形態のステップS27は第1実施形態のステップS05と同様であるため説明を省略する。
【0088】
ステップS26において制御部1はステップS25において算出した報知判定対象の信号機との方位角差(以下、「θ1」という。)が所定の範囲内か否かを判定する。報知判定対象の信号機との方位角差(θ1)が所定の範囲内であれば(ステップS26のY)ステップS27に進み、報知判定対象の信号機との方位角差(θ1)に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。報知判定対象の信号機との方位角差(θ1)が所定の範囲内でなければ(ステップS26のN)ステップS21に戻る。
【0089】
所定の範囲とは任意に設定した範囲としてもよいが、本実施形態においては交差点に応じて所定の範囲を算出する方法について記載する。本実施形態において所定の範囲とは、報知判定対象の信号機を含む複数の信号機が設置されている交差点において、各信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値(以下、「信号表示方向最小方位角差」という。)の1/2(半分)の値(以下、「θ2」という。)に基づいて算出され、「0度≦θ1≦θ2」又は「180−θ2≦θ1≦180」であるときにθ1が所定の範囲内であると判定される。なお、信号表示方向の方位角が異なる信号表示方向間の方位角差としたのは、信号表示方向最小方位角差が0度となるのを防ぐためである。
図6を用いて具体的に説明すると、交差点Bに設置された各信号機の信号表示方向の方位角について、信号機e及び信号機hの信号表示方向の方位角が30度、信号機f及び信号機mの信号表示方向の方位角が90度、信号機gと信号機jの信号表示方向の方位角が270度、信号機iと信号機nの信号表示方向の方位角が210度であるとすると、信号表示方向最小方位角差は│210−270│(210から270を引いた値の絶対値)等の60度であり、通信装置20の進行方向の方位角と報知判定対象の信号機の信号表示方向の方位角との方位角差θ1が「0度≦θ1≦30度」又は「150度(180度−30度)≦θ1≦180度」を満たさない場合には、θ1が所定の範囲内ではないので所定の態様で報知が行われない(図6において「θ2」はいずれも30度であるものとする。)。或いは、報知の強弱を図8に示すように設定する(所定の範囲外における報知の強さをゼロに設定する)ことにより、実質的に所定の態様で報知が行われないようにしてもよい。
本実施形態において所定の範囲を上述のように算出した理由について図6を用いて説明すると、ユーザが地点Zにいる場合、交差点Bに設置された信号機h及び信号機mの現在の信号表示情報に基づいて所定の態様で報知が行われることがある(例えば上述の報知判定対象の信号機を特定する第2の方法によって報知判定対象の信号機を特定した場合)。その際、報知判定対象の信号機との方位角差の如何を問わず報知判定対象の信号機との方位角差に基づいて強弱を設定することとすると、現在の報知が一つの信号機(信号機h若しくは信号機m)の現在の信号表示情報に基づく報知なのか、複数の信号機(信号機h及び信号機m)の現在の信号表示情報に基づく報知が重複した報知なのかが不明となる。
そこで複数の信号機の現在の信号表示情報に基づく報知が重複した報知を防ぐために、信号表示方向最小方位角差の1/2(半分)の値に基づいて所定の範囲を設定し、報知判定対象の信号機との方位角差が所定の範囲内ではないときは報知しない。これにより、ユーザが地点Zにいるときのみならず、交差点Bに設置された信号機の現在の信号表示情報に基づいて報知される位置にユーザがいる限り、複数の信号機の現在の信号表示情報に基づく報知が重複した報知が行われることを防ぐことができる。
すなわち、信号表示が赤信号及び青信号のどちらでも報知する場合において(例えば、赤信号なら振動し、青信号なら音声で「青信号です。」と報知する場合)、複数の信号機(信号機h及び信号機m)共に、図7に示すような報知の強弱設定を行なうと、複数の信号機(信号機h及び信号機m)の現在の信号表示情報に基づく報知が重複した報知(赤信号示す振動及び青信号を示す音声報知)が行なわれる。(例えば、複数の信号機の信号表示方向間の方位角差が90度で、通信装置20の進行方向の方位角が45度の場合)
ここで、全ての交差点における横断歩道が正方形(ひとつの角度が90度)で構成されていれば、例えば、一律に「0度≦θ1≦45度」を所定の範囲としてもよいが、正方形でない交差点が存在するため信号表示方向最小方位角差を用いることが好ましい。特に、2つの横断歩道がなす角度が90度以下の場合に顕著に効果が現れる。
つまり、図6の地点Zにいる場合に交差点Bに設置された信号機hの信号表示が青信号であり、信号機hとの方位角差(θ1)が44度の場合に、一律に「0度≦θ1≦45度」を所定の範囲としていた場合、青信号を知らせる報知がなされてしまう。しかしながら、交差点Bにおける信号機hとの方位角差(θ1)が44度の場合とは、信号機hと信号機mとの信号表示方向間の方位角差の1/2(30度)超えており、信号機mを向いていると考えられるため、青信号を知らせる報知を行なわないことが好ましい。
なお、信号表示方向最小方位角差は、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値ではなく、報知判定対象の信号機を特定する第2の方法で特定した2つの信号機の信号表示方向間の方位角差でもよい。
なお、交差点に設置された各信号機の信号表示方向の方位角が全て、当該交差点を形成するいずれかの道路(道路が複数の車線により構成されているときは、車線)に対応付けられた進行方向の方位角と平行であるときは、信号表示方向最小方位角差を、当該交差点を形成する道路同士がなす角(但し、0度≦道路同士がなす角≦90度)としてもよいが、交差点に設置された各信号機の信号表示方向の方位角のうち、一つでも当該交差点を形成する道路に対応付けられた進行方向の方位角と平行でないものがある場合には本実施形態と同様に、信号表示方向最小方位角差を、各信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値とすることが望ましい。
【0090】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機との方位角差が所定の範囲内でないときは報知を行わないので、複数の信号機の現在の信号表示情報に基づく報知が重複した報知が行われることを防ぐことができる。
[第4実施形態]
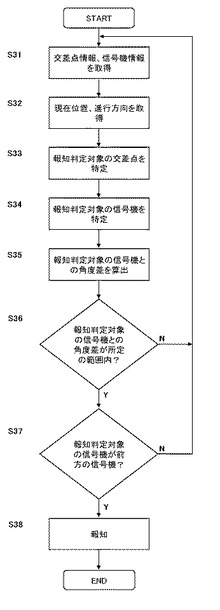
本発明の通信装置20の第4実施形態について図5を用いて説明する。図5は本発明の通信装置20の制御部1が実行する処理の流れを示す第4のフローチャートである。なお、本実施形態のステップS31〜ステップS36は第3実施形態のステップS21〜ステップS26と、また、本実施形態のステップS38は第1実施形態のステップS05と同様であるため説明を省略する。
【0091】
ステップS37において制御部1は報知判定対象の信号機が前方の信号機か否かを判定する。報知判定対象の信号機が前方の信号機であるときは(ステップS37のY)ステップS38に進み、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。報知判定対象の信号機が前方の信号機でなければ(ステップS37のN)ステップS31に戻る。
【0092】
報知判定対象の信号機が前方の信号機か否かは通信装置20の現在位置及び進行方向と、報知判定対象の信号機の位置座標或いは報知判定対象の信号機に対応付けられた横断歩道の始点/終点ノードの位置座標(以下、本ステップにおいて「ノード位置座標」という。)とに基づいて判定する。
【0093】
本実施形態においては、通信装置20の現在位置及び進行方向とノード位置座標とに基づいて判定する場合を例に説明するが、通信装置20の現在位置及び進行方向と報知判定対象の信号機の位置座標とに基づいて判定する場合も同様の方法で判定することができる。
【0094】
最初に、制御部1は通信装置20の現在位置からノード位置座標へ向かう方向(通信装置20の現在位置とノード位置座標とを結ぶ直線において、通信装置20の現在位置を中心としたノード位置座標への方向であり、以下、「方向A」という。)の方位角を算出する。
【0095】
そして制御部1は方向Aの方位角と通信装置20の進行方向の方位角との方位角差を算出し、当該方位角差が「0度以上90度以下」であるときに報知判定対象の信号機が前方の信号機であると判定する。
【0096】
言い換えると、通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±90度の範囲に報知判定対象の信号機に対応付けられた横断歩道の始点/終点ノードが存在するときに報知判定対象の信号機が前方の信号機であると判定する。
【0097】
なお、本実施形態では上述の通り「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±90度の範囲」を「前方」として報知判定対象の信号機が前方の信号機であるか否かを判定しているが、当該範囲は90度以外の任意の角度に設定することができ、例えば「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±45度の範囲」を「前方」とすることによって「前方」の範囲を本実施形態に比べて狭くすることとしてもよいし、「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±135度の範囲」を「前方」とすることによって「前方」の範囲を本実施形態に比べて広くすることとしてもよい。
【0098】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機が前方の信号機でない場合には報知が行われないので横断しない横断歩道に設置された信号機の現在の信号表示情報に基づいて報知がされることを防ぐことができる。
[変形例]
上記の実施形態では、報知判定対象の信号機を特定したが、報知判定対象の信号機を特定しなくても構わない。なお、以下の説明においては、進行許可信号表示(青信号)のときのみ報知する場合を例示する。
【0099】
まず、制御部1は通信部7を介して交差点情報及び信号機情報を取得する。
【0100】
次に、制御部1は信号機情報に含まれる信号機の現在の信号表示情報(信号機の表示色を示す情報)に基づき、現在の信号表示が進行許可信号表示(青信号)である信号機を特定する。そして、特定した信号機に対応付けられた信号表示方向情報(信号表示方向の方位角)と通信装置20の進行方向の方位角との方位角差を算出する。そして、算出した方位角差に基づいて報知の強弱を設定する(図7参照)。
【0101】
これにより、現在の信号表示が進行許可信号表示(青信号)である信号機の信号表示方向の方位角に対して、通信装置20の進行方向の方位角との方位角差が90度であれば(青信号の信号機に対して真横を向いていれば)、報知されることがなく、方位角差が180度であれば、(青信号の信号機に対して正面を向いていれば)、強く報知される。なお、図7のように方位角差が180度から90度に近づくにつれて報知は弱く(小さく)なっていく。
【0102】
この方法によれば、報知判定対象の信号機を特定せずとも、現在の信号表示が進行許可信号表示(青信号)である信号機の方向をユーザが向いているか否かを判定できる。なお、現在の信号表示が進行許可信号表示(青信号)である信号機を報知判定対象の信号機として特定してもよい。
【0103】
また、その他にも、上記の実施形態では、信号機情報には信号機毎に、信号機に対応付けられた信号表示方向情報(信号機の信号表示方向の方位角を示す情報)、信号機の現在の信号表示情報(信号機の表示色を示す情報)が含まれたが、これに限ることはない。すなわち、通常、対向する信号機(図6における信号機I及び信号機M)は同じ信号表示を行なうものと考える。そのため、図6の交差点Aのような四叉路では、信号機情報として、4つの現在の信号表示情報(信号機の表示色を示す情報)と、8つの信号表示方向情報が含まれることが考えられる。なお、この場合、1つの現在の信号表示情報に2つの信号表示方向情報が対応付けられる。すなわち、図6における信号機I及び信号機Mを1つの信号機とし、当該信号機の現在の信号表示情報と、当該信号機の信号表示方向情報(信号機Iの信号表示方向情報及び信号機Mの信号表示方向情報)が含まれても良い。
【0104】
なお、この場合、横断歩道の始点/終点ノードも同様にひとつの現在の信号表示情報に対して2つの横断歩道の始点/終点ノードが対応付けられる。そのため、上記第4実施形態のように進行方向と、信号機の位置座標或いは当該信号機に対応付けられた横断歩道の始点/終点ノードの位置座標とに基づいて判定する場合は、2つの信号機の位置座標或いは2つの横断歩道の始点/終点ノード共に、通信装置20の進行方向の方位角の「±90度以下」の範囲内でないときに前方の信号機でないと判定することが好ましい。
【0105】
さらに、上記の実施形態では、信号機のある交差点に路側器が設置された場合を例示したが、交差点でなくとも、例えば、自動車の右左折に関係なく、歩行者が道路を横断するための信号機付きの横断歩道に路側器が設置されていてもよく、この場合では、横断歩道の両端に設置された対向する信号機を別々として、又は、1つの信号機とし、信号機の現在の信号表示情報と、信号機の信号表示方向情報が送信される。そして、通信装置20は制御部1は通信部7を介して信号機情報を取得し、信号機情報に含まれる信号機の信号表示方向情報(信号表示方向の方位角は2つ存在し、一方と他方は180度異なる)と通信装置20の進行方向の方位角との方位角差を算出し、その方位角差に基づいて報知の強弱を設定してもよい。そして、設定した報知の強弱及び信号機の現在の信号表示に基づく報知を行なう。例えば、方位角差が180度で信号機の現在の信号表示が赤信号であれば、大音量で「赤信号です。」と音声出力を行なう。なお、この場合において、信号表示方向の方位角は2つ存在するため、通信装置20の進行方向の方位角との方位角差も2つ存在する。そのため、算出した方位角差のうち、小さい方位角差を用いることが好ましい。
【0106】
また、上記の実施形態では、方位角差に基づいて報知の強弱を設定したが、報知の強弱ではなく、報知の形態を設定するものであっても良い。例えば、方位角差が180度〜150度であれば、音声出力とし、方位角差が149度〜90度であれば振動などの設定としてもよい。
【産業上の利用可能性】
【0107】
本発明はユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置に利用することができる。
【符号の説明】
【0108】
1・・・制御部、2・・・表示部、3・・・操作部、4・・・現在位置検出部、5・・・進行方向検出部、6・・・地図情報記憶部、7・・・通信部、8・・・報知部、20・・・通信装置
【技術分野】
【0001】
本発明は、ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置に関する。
【背景技術】
【0002】
近年、情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故や渋滞などといった道路交通問題の解決を目的とした高度道路通信システム(Intelligent Transport Systems、以下「ITS」という。)が研究、開発されている。ITSの中でも特に歩行者等の支援を扱う分野における歩行者向け無線通信の形態は路側機と歩行者が所有する通信装置(例えば携帯電話)との間で通信が行われる。
【0003】
路側機から通信装置に送信される情報は歩行者に対する経路案内や歩行者(特に高齢者や障害者等の交通弱者)の安全で円滑な歩行を支援することなどを目的とした情報であり、具体的には歩行者周辺の車両の状態を示す車両情報や、交差点・信号機に関する情報(交差点情報、信号機情報)が含まれる。そして各情報を活用して種々の制御を行う通信装置が提案されている。
【0004】
ところで、従来から視覚障害者の安全で円滑な歩行のために交差点において種々の支援がなされている。例えば、視覚障害者が安心して横断歩道を横断できるように信号機の信号表示が進行許可信号表示(青信号)であるときには音楽や一定の間隔で音を交差点全体に鳴らす等の音による支援が行われている。しかしながらこのような音による支援は信号機が設置されている全ての交差点で行われているわけではない。
【0005】
そこで、特許文献1に開示されている横断歩道の信号誘導方法は、横断歩道に対する利用者の現在位置に応じてその現在位置に関する信号を前記横断歩道の複数地点に予め埋め込まれた信号発生機から受信して読み取り、その読み取り信号を含む前記利用者の信号誘導に関するデータを短距離無線で前記横断歩道の信号機側に送信することにより前記利用者が前記横断歩道を渡れるように前記信号機を制御し、併せて前記信号機の信号制御に関するデータを前記短距離無線で前記利用者側に認知可能に送信している。
【0006】
これにより視覚障害者が安心して横断歩道を渡ることができることとしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−279584号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記先行技術文献に開示されている横断歩道の信号誘導方法は、信号発生機を路面に埋め込む必要があり、またユーザ端末(ユーザが携行している通信装置)が信号機側と通信を行うブルートゥース(登録商標)無線通信手段の他に当該信号発生機からの信号を受信する受信手段を備える必要があるためコストや手間がかかってしまう。
【0009】
また、ユーザの位置を確認するために信号発生機を使用している(ユーザが信号発生機の上に立つことによりユーザの位置が確認される)ので、ユーザが横断歩道の手前で停止しているが信号発生機上で停止していない場合や横断歩道に向かって歩いていて信号発生機まで達していない場合にはユーザの位置が確認できないという問題がある。
【0010】
さらに、信号機側は位置が確認できたユーザ端末ごとに通信を行うため、多数のユーザ端末が横断歩道付近に存在する場合には通信量や情報処理能力の限界によって全てのユーザ端末に対応しきれなくなる可能性がある。
【0011】
本発明は、上述した問題点に鑑み、ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために本発明の通信装置は、他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づく報知設定及び前記信号機の現在の信号表示情報に基づく報知を報知部を制御して行う制御部と、を備えることを特徴としている。
【0013】
また上記構成の通信装置において、前記制御部は、少なくとも前記信号機情報に基づいて報知対象判定の信号機を特定して、前記通信装置の進行方向の方位角と、前記報知対象判定の信号機の信号表示方向の方位角とから前記方位角差を算出することが望ましい。
【0014】
また上記構成の通信装置において、前記通信装置はさらに、前記通信装置の現在位置を検出する現在位置検出部を備え、前記制御部は、地図情報を取得して前記通信装置の現在位置から最も近い横断歩道の始点/終点ノードを特定し、前記報知判定対象の信号機は、特定された前記横断歩道の始点/終点ノードが、信号機に対応付けられた横断歩道の始点/終点ノードと一致する信号機であることが望ましい。
【0015】
また上記構成の通信装置において、前記通信装置はさらに、前記通信装置の現在位置を検出する現在位置検出部を備え、前記制御部は、地図情報を取得して前記通信装置の現在位置の属する歩道を特定し、前記報知判定対象の信号機は、特定された前記歩道が、信号機に対応付けられた歩道と一致する信号機であることが望ましい。
【0016】
また上記構成の通信装置において、前記制御部は、前記通信装置の進行方向の方位角と、前記信号機情報に含まれる信号機に対応付けられた信号表示方向の方位角とが対向方向又は同一方向であるかを判定し、前記報知判定対象の信号機は、信号機に対応付けられた信号表示方向の方位角が、前記通信装置の進行方向の方位角と対向方向又は同一方向である信号機であることが望ましい。
【0017】
また上記構成の通信装置において、前記通信部はさらに交差点情報を受信し、前記報知判定対象の信号機は、報知判定対象の交差点に設置された信号機であって、前記報知判定対象の交差点は、少なくとも前記通信装置の現在位置と前記交差点情報とに基づいて特定されることが望ましい。
【0018】
また上記構成の通信装置において、前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことが望ましい。
【0019】
また上記構成の通信装置において、前記所定の範囲は、複数の信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差に基づいて定められることが望ましい。
【0020】
また上記構成の通信装置において、前記制御部は前記報知判定対象の信号機が前方の信号機であるか否かを判定し、前記報知判定対象の信号機が前方の信号機でないときには報知を行わないことが望ましい。
【0021】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた音声出力部を介した音声案内であることが望ましい。
【0022】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた振動機能による振動であることが望ましい。
【0023】
また上記構成の通信装置において、前記報知は、前記通信装置に備えられた表示部への光又は色彩の表示であることが望ましい。
【0024】
また上記構成の通信装置において、前記報知設定は、前記報知の強弱であることが望ましい。
【発明の効果】
【0025】
本発明によると、通信装置は信号機の現在の信号表示情報に基づいて所定の態様で報知を行うのでユーザ(特に視覚障害者)が安心・安全に信号機を通過・通行できる。その際、方位角差に基づいて報知設定することにより、ユーザが信号機に対して正しい方向に移動しているか否かを知らせることができるので、より安心・安全に信号機が設置された交差点を通過・通行できる。
【図面の簡単な説明】
【0026】
【図1】は、本発明の通信装置の構成を示すブロック図である。
【図2】は、本発明の通信装置の制御部が実行する処理の流れを示す第1のフローチャートである。
【図3】は、本発明の通信装置の制御部が実行する処理の流れを示す第2のフローチャートである。
【図4】は、本発明の通信装置の制御部が実行する処理の流れを示す第3のフローチャートである。
【図5】は、本発明の通信装置の制御部が実行する処理の流れを示す第4のフローチャートである。
【図6】は、本発明の実施形態に係る報知システムの構成例の模式図である。
【図7】は、本発明の実施形態に係る報知判定対象の信号機との角度差に基づく報知の強弱の設定例を示す第1の図である。
【図8】は、本発明の実施形態に係る報知判定対象の信号機との角度差に基づく報知の強弱の設定例を示す第2の図である。
【発明を実施するための形態】
【0027】
以下に本発明の実施形態について図面を参照して説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するために本発明の通信装置の一例を示すものであって、本発明をこの通信装置に特定することを意図するものではない。例えば、携帯電話等の移動通信端末であってもよい。なお、以下の説明では、通信装置をユーザが携行している場合を例示するが、車椅子や自転車、自動車等に取り付けられていてもよい。図1は本発明の通信装置の構成を示すブロック図である。通信装置20は制御部1と、表示部2と、操作部3と、現在位置検出部4と、進行方向検出部5と、地図情報記憶部6と、通信部7と、報知部8と、を備えている。
【0028】
制御部1は通信装置20全体を総括的に制御する制御手段である。制御部1はCPUとROMとRAM(いずれも不図示)とを含んでいる。ROMには制御部1が実行するプログラム、プログラムの実行に必要なパラメータやデータが記憶されている。CPUはROMに記憶されている各種プログラムを実行する。RAMは各種処理の過程で得られるデータや各種処理の結果得られるデータを一時的に格納する。これらCPU、RAM、ROM等は、バスを介して接続されている。なお、CPU、ROM及びRAMはこれらの一部または全部を1チップに集積化しても構わない。
【0029】
表示部2は地図画面(通信装置20の現在位置(ユーザが通信装置20を携行している場合には「ユーザの現在位置」と言い換えることができる、以下同じ)を示すマークなどを含む地図画像を表示する画面)やメニュー画面を表示するための表示手段である。
【0030】
操作部3はユーザが通信装置20の各種機能を利用するための操作手段である。なお、操作部3としては、通信装置本体に各種のキーやボタンを設けてもよいし、表示部2にタッチパネル機能を付加してもよい。また、操作部3として通信装置本体を遠隔操作するためのリモートコントローラを用いても構わない。
【0031】
現在位置検出部4は通信装置20の現在位置を検出するものであり、GPS受信機、自立航法手段、位置計算用CPU等を含んで構成される。自立航法手段は操角センサ、加速度センサ、距離センサや方位センサなどからなり、通信装置20の移動距離と進行方向とをそれぞれ検出し、これらの値に基づいて現在位置を求める。また、GPS受信機は複数のGPS衛星から送られてくる電波をGPSアンテナで受信して3次元測位処理又は2次元測位処理を行って通信装置20の絶対位置及び進行方向を計算する。ここで進行方向は現時点の位置と直前の位置とに基づいて計算される。
【0032】
進行方向検出部5は通信装置20の進行方向(移動方向)(ユーザが通信装置20を携行している場合には「ユーザの進行方向(移動方向)」と言い換えることができる、以下同じ)を検出する。進行方向の検出方法は特に限定されず、例えば現時点の位置と直前の位置とに基づいて計算される。また、通信装置20が停止している場合には、直前の進行方向(停止する前に移動していた時点における位置とその直前の位置とに基づいて計算される進行方向)が停止時の進行方向として検出される。なお、方位センサを用いて検出することとしてもよいが、ユーザが通信装置20を携行している場合には、通信装置20が実際の進行方向(ユーザが現に歩いている方向)を向いているか否かが定かではないため、上述のように実際の進行方向を算出できる方法を用いることが望ましい。なお、上述のように現在位置検出部4が通信装置20の現在位置に加えて進行方向を検出することができる場合には進行方向検出部5を別途設けない構成としてもよい。なお、後述する通信装置20の進行方向の方位角とは、進行方向を方位に基づいて角度で現したものであり、本実施形態においては、北を基準とした角度で表現し、北が0度(360度)、東が90度、南が180度、西が270度と定める。なお、進行方向の方位角は、方位センサの出力に基づいて算出される他、北を基準とした相対方位に基づいて算出されてもよい。
【0033】
地図情報記憶部6は現在位置のマップマッチング処理を行うときなどに参照される地図情報が記憶されている。地図情報には、ネットワークデータ(ノードデータ、リンクデータ)が含まれる。地図情報記憶部6としてはNANDフラッシュやSDメモリカードなどを好適に用いることができる。地図情報記憶部6は通信装置20に内蔵しても構わないし、通信装置20に着脱可能な構成としても構わない。なお、地図情報には、地図画像が含まれていてもよいし、地図情報に含まれるネットワークデータ(ノードデータ、リンクデータ)に基づき地図画像を表示部2に描画してもよい。また、地図情報は予め地図情報記憶部6に記憶される以外にも、後述する通信部7が路側機などから地図情報を受信し、受信された地図情報が地図情報記憶部6に記憶されてもよい。
【0034】
ここで、地図情報はネットワークデータを含み、ネットワークデータには、道路や歩道をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。
【0035】
ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、道路種別/歩道種別、交差点情報や交差点名称などを示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0036】
また、リンクデータは、リンクの始点及び終点となるノード番号、道路種別/歩道種別(一般道路、高速道路、一般歩道、歩行者専用道路、横断歩道、横断歩道橋など)、距離及び/又は所要時間等を含むリンクコスト、国道○号線のような道路名称、進行方向のデータを含んで構成される。リンクデータは上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0037】
本発明においては、ネットワークデータに、横断歩道のノードデータ・リンクデータが含まれる。現在位置検出部4によって検出される通信装置20の現在位置と地図情報とに基づき、制御部1がマップマッチング処理を行う。
【0038】
なお、マップマッチング処理については、制御部1が行なってもよいが、現在位置検出部4が行なってもよい。すなわち、GPS受信機及び/又は自律航法手段を用いて検出した現在位置と地図情報とに基づき、マップマッチング処理を行い、マップマッチング処理を行なった現在位置を現在位置として制御部1へ出力してもよい。或いは、制御部1のマップマッチング処理までを含めて現在位置検出部4としてもよい。
【0039】
通信部7は通信装置20と通信可能な他の通信装置(以下、「他の通信装置」という。)に情報を送信する送信部(図示せず)と他の通信装置から送信される情報を受信する受信部(図示せず)とを有する。通信方法は無線通信や赤外線通信などの非接触通信とすることが好ましい。他の通信装置としては路側機、車両に搭載されたナビゲーション装置等の車載装置、歩行者が所持する携帯電話等の移動通信端末などを挙げることができる。通信部7が路側機から受信する情報には交差点情報と信号機情報が含まれる。このとき通信部7は、単一の交差点情報や信号機情報を受信するのではなく、複数の交差点毎の交差点情報及び信号機情報を受信してもよい。
【0040】
ここで、通信部7が受信する交差点情報及び信号機情報について説明を行なう。なお、以下の説明では、信号機が設置された交差点毎に路側機が設置され、路側機から、当該路側機が設置された交差点の情報(交差点情報)及び当該路側機が設置された交差点に設置された信号機(車両用信号機及び歩行者用信号機)の情報(信号機情報)を含む情報が送信されるものとする。
【0041】
交差点情報には、例えば、交差点の位置(緯度・経度)や路側機(交差点)を識別する情報などが含まれる。
【0042】
信号機情報には車両用信号機の信号機情報と歩行者用信号機の信号機情報とが含まれており、特に歩行者用信号機の信号機情報には、信号機を識別するための識別情報(信号機番号)、信号機の位置(緯度、経度)、信号機に対応付けられた歩道を示す情報(どの歩道に存在する歩行者に対する信号表示であるかを示す情報)、信号機に対応付けられた横断歩道の始点/終点ノードを示す情報(どの始点/終点ノードに存在する歩行者に対する信号表示であるかを示す情報)、信号機に対応付けられた信号表示方向情報(信号機の信号表示方向の方位角を示す情報)、信号機の現在の信号表示情報(信号機の表示色を示す情報)、次の信号表示情報及び該信号表示に変更されるまでの時間等の情報が含まれる。なお、交差点に複数の信号機が設置されている場合には、信号機情報には、信号機毎に信号機の現在の信号表示情報などの情報が含まれている。一般に方位角とは、北を基準とした角度で表現され、北が0度(360度)、東が90度、南が180度、西が270度と定められている。従って、以下の実施形態においては上記基準に基づいて方位角を記載するものとする。
【0043】
報知部8は所定の態様で各種情報を報知する。報知の態様は特に制限されないが、視覚障害者が安心・安全に横断歩道を横断できるように支援をするのに適した態様であることが望ましく、例えばスピーカ(不図示)を介して所定の音声を出力することや、振動機能(バイブレーション機能)により通信装置20を所定の振動方法で振動させることにより行われる。また、近距離における光覚や色覚を有する視覚障害者のために表示部2に所定の輝度の光や所定の色彩(青色や赤色)を表示することとしてもよく、或いはこれらを組み合わせ、或いは同時に行うこととしてもよい。説明の簡略化のために報知部8と表示部2を別の構成として設けているが、報知方法が表示部2への所定の表示を含む場合には報知部8が表示部2を含む構成として設けてもよい。
[第1実施形態]
本発明の通信装置20の第1実施形態について図2を用いて説明する。図2は本発明の通信装置20の制御部1が実行する処理の流れを示す第1のフローチャートである。
【0044】
ステップS01において制御部1は通信部7を介して交差点情報及び信号機情報を取得する。次にステップS02において制御部1は現在位置検出部4によって検出される通信装置20の現在位置と、現在位置検出部4や進行方向検出部5により検出される通信装置20の進行方向とを取得する。
【0045】
なお、本実施形態において制御部1は、ステップS01において交差点情報及び信号機情報を取得し、ステップS02において通信装置20の現在位置と進行方向を取得しているが、制御部1がこれらの情報を取得する順番はフローチャートに示した順序でなくてもよく、例えば同時に取得するものであってもよいし、先に現在位置と進行方向を取得するものであってもよい。
【0046】
また、制御部1が現在位置と進行方向、及び、交差点情報と信号機情報を取得するタイミングは当該タイミングとは限られない。定期的或いは不定期(例えば、他の通信装置の送信タイミングに基づいて)に取得されてもよく、定期的或いは不定期に複数回情報を取得する場合には、取得された情報のうち最も新しい情報を使用することとしてもよい。
【0047】
ステップS03において制御部1は報知判定対象の信号機を特定する。報知判定対象の信号機を特定する方法について以下詳説する。
【0048】
報知判定対象の信号機を特定する第1の方法は、通信装置20の現在位置と地図情報と横断歩道の始点/終点ノードの位置座標とに基づいて特定する方法である。すなわち、前述の通り地図情報には、横断歩道のノードデータ・リンクデータ(始点/終点ノードを含む)が含まれている。そして、横断歩道のノードデータには、横断歩道の始点/終点ノードの位置座標(緯度・経度)を示す情報が含まれている。
【0049】
そこで制御部1はまず、通信装置20の現在位置から最も近い横断歩道の始点/終点ノードを特定する。通信装置20の現在位置から横断歩道の始点/終点ノードまでの距離は、通信装置20の現在位置の座標(緯度・経度)と横断歩道の始点/終点ノードの位置座標(緯度・経度)とを結ぶ直線の距離(すなわち、直線距離)としてもよいし、道路環境を考慮に入れた最短距離(例えば通信装置20の現在位置の座標(緯度・経度)と横断歩道の始点/終点ノードの位置座標(緯度・経度)とを結ぶ直線上に建築物等の通過できない障害物がある場合には、当該障害物を迂回するルートであって且つ最短の距離となるルート)としてもよい。そして、現在位置から最も距離の短い横断歩道の始点/終点ノードを現在位置から最も近い横断歩道の始点/終点ノードとする。
【0050】
なお、横断歩道は歩行方向(進行方向)が定まっておらず、その両端においていずれが始点となり、いずれが終点となるか定まっていないため本実施形態では「始点/終点」ノードと記載しているが、特定されるノードは一箇所であり、図6の模式図を参照すると、地点Xに通信装置20を携行するユーザがいる場合には、ノードaが通信装置20の現在位置から最も近い横断歩道の始点/終点ノードとして特定される。
【0051】
次に、特定された横断歩道の始点/終点ノード(例えば、図6におけるノードa)と通信部7が受信した信号機情報に含まれる信号機に対応付けられた横断歩道の始点/終点ノードとが一致する信号機(例えば、図6における信号機M)を報知判定対象の信号機と特定する。なお、信号機Iと信号機Mは同一の横断歩道上に設置されているが、ノードaは信号機Iに対応付けられた横断歩道の始点/終点ノードではない。前述の通り「信号機に対応付けられた始点/終点ノード」とは、信号機の信号表示がどの始点/終点ノードに存在するユーザに対する信号表示であるかに基づいて定められている始点/終点ノードであり、ノードaに存在するユーザに対して信号表示を行う信号機は信号機Mのみに限定される(信号機Iはノードcに存在するユーザに対して信号表示を行う信号機であって、ノードaに存在するユーザに対して信号表示を行う信号機ではない。)。
【0052】
なお、第1の方法では、地図情報に含まれる始点/終点ノードのうち最も近い横断歩道の始点/終点ノードを特定し、特定した横断歩道の始点/終点ノードと、通信部7が受信した信号機情報に含まれる横断歩道の始点/終点ノードとが一致した場合、当該始点/終点ノードに対応付けられた信号機を報知判定対象の信号機と特定したが、地図情報に横断歩道の始点/終点ノードがなくとも、受信した横断歩道の始点/終点ノードのうち最も近い横断歩道の始点/終点ノードを特定し、特定した横断歩道の始点/終点ノードに対応付けられた信号機を報知判定対象の信号機と特定してもよい。
【0053】
報知判定対象の信号機を特定する第2の方法は、通信装置20の現在位置と歩道とに基づいて特定する方法である。すなわち、前述の通り地図情報には、一般歩道等の歩道種別を示す情報が含まれている。なお、この歩道種別は、道路を挟んで異なる種別が割り当てられるものとする。そこで制御部1はまず、通信装置20の現在位置(例えば、図6における地点X)の属する(ユーザが歩行或いは停止している)歩道を特定する(例えば、図6における一般歩道P)。
【0054】
次に、特定された歩道と通信部7が受信した信号機情報に含まれる信号機に対応付けられた歩道とが一致する信号機(例えば、図6における信号機L及び信号機M)を報知判定対象の信号機と特定する。
【0055】
よって、報知判定対象の信号機を特定する第2の方法によれば報知判定対象の信号機が一つに特定されない場合があるが、後述するように通信装置20の進行方向の方位角と信号機の信号表示方向の方位角との方位角差に基づいて報知の強弱を設定するので歩行者支援に反するものとはならない。また、後述する第3の方法と組み合わせることによって報知判定対象の信号機を一つに特定することができる。
【0056】
なお、前述の通り、「信号機に対応付けられた歩道」とは、どの歩道に存在する歩行者に対する信号表示であるかに基づいて定められた歩道である。従って、信号機Nと信号機Iは歩道Pに設置されている(信号機が歩道に設置されていない場合には「信号機に対応付けられた歩道」であるか否かについて疑義が生じないため、信号機が歩道に設置されている場合を例に説明しているが、本実施形態や以下の実施形態において信号機が歩道に設置されているか否かは問われない。)が、歩道Pに存在する歩行者に対する信号表示ではないため報知判定対象の信号機として特定されることはない。
【0057】
なお、信号機に対応付けられた歩道を示す情報の「歩道」とは、例えば、ある範囲のことであってもよく、例えば、4点の位置座標や、特定の位置座標及び半径などからなる。受信したこの4点の位置座標などにより特定される範囲内に現在位置が含まれる場合に、この範囲(歩道)に対応付けられた信号機を報知判定対象の信号機として特定する。(例えば、図6における信号機L及び信号機M)
報知判定対象の信号機を特定する第3の方法は、通信装置20の進行方向の方位角と信号機の信号表示方向の方位角とに基づいて特定する方法である。すなわち、前述の通り信号機情報には信号機に対応付けられた信号表示方向情報が含まれている。そこで制御部1は通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが対向する信号機を報知判定対象の信号機と特定する。
【0058】
例えば図6の模式図を参照して通信装置20の進行方向が進行方向Gであるときは、進行方向の方位角が0度であるため、信号表示方向の方位角が対向する(すなわち、信号表示方向の方位角が180度である)信号機M及び信号機Kが報知判定対象の信号機と特定される。上記報知判定対象の信号機を特定する第2の方法と同様に報知判定対象の信号機が一つに特定されない場合があるが、信号機Mと信号機Kの信号表示(例えば青信号)のサイクルやタイミングが共通する場合には、いずれの現在の信号表示情報に基づいて報知を行ってもよいため報知判定対象の信号機を一つに特定する必要はない。
【0059】
一方、信号機Mと信号機Kの信号表示(例えば青信号)のサイクルやタイミングが異なる場合には、上記報知判定対象の信号機を特定する第2の方法と組み合わせることによって報知判定対象の信号機を一つに特定することが望ましい。
【0060】
なお、報知判定対象の信号機を特定する第3の方法においては通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが対向する信号機を報知判定対象の信号機と特定しているが、通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角とが一致する(同一である)信号機(例えば、図6における信号機I及び信号機J)を報知判定対象の信号機と特定してもよい。なぜなら、同一横断歩道における信号表示方向の方位角が対向する信号機(例えば図6における信号機Iと信号機M)は信号表示のサイクルやタイミングが共通しているからである。なお、これは報知判定対象の信号機を特定する第1の方法及び第2の方法も同様である。
【0061】
なお、「方向が対向する」とは、通信装置20の進行方向の方位角と信号機に対応付けられた信号表示方向の方位角との方位角差(以下、「信号機との方位角差」という。)が180度であることをいい、「方向が一致する(同一である)」とは信号機との方位角差が0度である(方位角が共通している)ことをいうが、いずれも所定の誤差を設けることとしてもよく、例えば「方向が対向する」とは信号機との方位角差が150度〜180度であることとし、また、「方向が一致するとは」信号機との方位角差が0度〜30度であることとしてもよい。
【0062】
例えば、通信装置20の進行方向の方位角が10度であり、信号機に対応付けられた信号表示方向の方位角が180度である場合には、信号機との方位角差は170度であり、上述のように「方向が対向する」が、信号機との方位角差が150度〜180度であることである場合には、当該信号機に対応付けられた信号表示方向の方位角は通信装置20の進行方向の方位角に対向するものであるため当該信号機が報知判定対象の信号機として特定される。
【0063】
なお、本実施形態及び以下の実施形態において方位角差は、「0度≦方位角差≦180度」となるように算出されるが(方位角差の算出方法については後述する)、これは説明の便宜上、範囲を制限したものであって、本発明における方位角差は当該範囲に制限されるものではなく、例えば、方位角差が「0度≦方位角差≦360度」となるように算出されるものであってもよい。その場合、上記所定の誤差として例示した範囲は、「方向が対向する」とは信号機との方位角差が150度〜210度であることとなり、また、「方向が一致するとは」信号機との方位角差が0度〜30度又は330度〜360度であることとなる。
【0064】
ステップS04において制御部1は、通信装置20の進行方向の方位角と報知判定対象の信号機の信号表示方向の方位角との方位角差(以下、「報知判定対象の信号機との方位角差」という。)を算出する。
【0065】
報知判定対象の信号機との方位角差は、通信装置20の進行方向の方位角と、報知判定対象の信号機の信号表示方向の方位角とに基づいて「0度≦方位角差≦180度」となるように算出される。以下、報知判定対象の信号機を例に方位角差の算出方法について説明するが、ステップS03における信号機との方位角差も同様の方法で算出するものとする。
【0066】
報知判定対象の信号機との方位角差を算出する第1の方法は、通信装置20の進行方向の方位角に延びるベクトルと、報知判定対象の信号機の信号表示方向の方位角に延びるベクトルとを算出し、二つのベクトルのなす角を方位角差とする方法である。
【0067】
二つのベクトルは二つの角を形成し(ベクトルは向き(方向)を持っており、二つのベクトルのなす角とは、二つのベクトルの交点を中心としてそれぞれの方向へ向かう二つの線分のなす角と言い換えることができるため、二つのベクトルは二つの角を形成する。)、二つの角としては共に180度である場合と、一方が180度を越える角であり他方が180度未満の角である場合とがある。本実施形態においては180度以下の角を報知判定対象の信号機との方位角差として算出するものとする。これにより、「0度≦方位角差≦180度」となる。
【0068】
報知判定対象の信号機との方位角差を算出する第2の方法は、通信装置20の進行方向の方位角から、報知判定対象の信号機の信号表示方向の方位角を引いた値(報知判定対象の信号機の信号表示方向の方位角から、通信装置20の進行方向の方位角を引いた値でもよい)の絶対値を算出し、当該絶対値が180度以下であるときは当該絶対値を報知判定対象の信号機との方位角差とし、当該絶対値が180度を超えるときは360度から当該絶対値を引くことによって算出される値を報知判定対象の信号機との方位角差とする方法である。これにより、「0度≦方位角差≦180度」となる。本実施形態及び以降の実施形態においては、報知判定対象の信号機との方位角差を算出する第2の方法により報知判定対象の信号機との方位角差を算出するものとする。
【0069】
例えば通信装置20の進行方向の方位角が10度であり、報知判定対象の信号機の信号表示方向の方位角が320度であるときに、上記方位角差を算出する第2の方法により報知判定対象の信号機との方位角差を算出すると、通信装置20の進行方向の方位角から、報知判定対象の信号機の信号表示方向の方位角を引いた値の絶対値は310度であり、180度を超えるため、360度から310度を引いた50度が報知判定対象の信号機との方位角差となる。
【0070】
なお、上述のステップS03において報知判定対象の信号機を特定する際に信号機との方位角差を算出しているとき(特に上述の報知判定対象の信号機を特定する第3の方法により報知判定対象の信号機を特定したとき)はステップS03で算出した信号機との方位角差を報知判定対象の信号機との方位角差として取得することとしてもよい。
【0071】
そしてステップS05において制御部1は、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。
【0072】
報知判定対象の信号機との方位角差に基づく強弱の設定は、例えば図7のように設定される。このように報知判定対象の信号機との方位角差に基づいて報知の強弱を異なるようにすると、報知判定対象の信号機が一つに特定されている場合には、進行方向の正しさが分かり、より強く通信装置20が振動する方向に進行方向を変えることによって安心・安全に横断歩道を横断することができる。
【0073】
なお、図7の方位角差に基づく強弱の設定は、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合の設定である。そして、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合において、報知判定対象の信号機との方位角差が180度の場合(図7参照)であるとき、すなわち、ユーザが向いている方向(ユーザの進行方向)に報知判定対象の信号機があるときに、強く(大音量で)報知が行なわれる。その一方、報知判定対象の信号機との方位角差が90度に近づくにつれ、すなわち、ユーザが向いている方向(ユーザの進行方向)が報知判定対象の信号機でなくなっていくにつれ、報知が弱く(小さく)なっていく。なお、図7では、信号機との方位角差が0度の場合も、強く(大音量で)報知が行なわれるが、方位角差が0度の場合であれば、信号機から遠ざかる場合が考えられるため、報知しないようにしてもよい。
【0074】
なお、報知判定対象の信号機の現在の信号表示が進行許可信号表示(青信号)である場合にのみ報知する場合であれば、報知判定対象の信号機の現在の信号表示が進行不許可信号表示(赤信号)であれば、方位角差に基づく強弱の設定に関係なく報知されない。但し、報知判定対象の信号機の現在の信号表示が進行不許可信号表示(赤信号)である場合においても、「赤信号です。」などの報知を行なう場合であれば、方位角差に基づく強弱の設定を用いてもよい。
【0075】
一方、報知判定対象の信号機が一つに特定されていない場合(特に上記報知判定対象の信号機を特定する第3の方法の場合)には、ユーザがどの横断歩道を横断するかを決めていない(例えば二つの横断歩道のどちらを横断しても目的地に辿り着ける場合)等の場合に、複数の横断歩道の信号表示を知ることができる。
【0076】
図6に基づいて具体的に説明すると、地点Xにユーザがいる場合は、上記報知判定対象の信号機を特定する第1の方法によれば通信装置20は信号機Lの現在の信号表示情報に基づいて報知を行うことがなく、信号機Lの現在の信号表示を知りたいときには通信装置20の現在位置から最も近いノードがノードbとなるように移動する必要がある。これに対し上記報知判定対象の信号機を特定する第3の方法によればユーザが信号機Lの方向に移動する(或いは、信号機Lの方向に体を向ける)だけで信号機Lの現在の信号表示が分かる(例えば現在の信号表示が青信号であれば振動し、現在の信号表示が赤信号であれば振動しない。)。なお、例えば信号機Mと信号機Kなどの平行する信号機の信号表示(例えば青信号)のサイクルやタイミングが共通する場合では、報知判定対象の信号機を特定する第3の方法のみを用いて、ユーザの進行方向を変更に応じて複数の横断歩道の信号表示を知ることができる。
【0077】
その際、報知判定対象の信号機との方位角差に基づいて報知の強弱を異なるようにするので、進行方向を変更したときの進行方向の正しさが分かり、より強く通信装置20が振動する方向に進行方向を変えることによって安心・安全に横断歩道を横断することができる。(進行許可信号表示(青信号)時に振動する場合)
報知の態様は特に制限されないが前述の通り、振動機能、音声案内、表示部2への表示が例示される。振動機能により報知する場合には、振動と報知判定対象の信号機との方位角差に基づく振動の強弱(振動の大きさ)による報知や、所定間隔の振動と報知判定対象の信号機との方位角差に基づく振動間隔の強弱(振動間隔の長さ、短さ)による報知などが考えられる。音声案内により報知する場合には、所定の音と報知判定対象の信号機との方位角差に基づく音量の強弱(音量の大きさ、小ささ)による報知や、所定間隔の音と報知判定対象の信号機との方位角差に基づく音が鳴る間隔の強弱(音が鳴る間隔の長さ、短さ)による報知などが考えられる。所定の音は、テストトーンのような単調な音(単一周波数の正弦波信号)のみならず、例えば「青信号です。」のように一定の意味を有する音(音声)であってもよい。表示部2への表示により報知する場合には、例えば「青信号です。」という文字を表示部2に表示するものであってもよいが、本発明は特にユーザが視覚障害者である場合に効果を奏するため、表示部2への表示は限定されると考えられる。例えば近距離における光覚や色覚を有する視覚障害者のために、所定の光と報知判定対象の信号機との方位角差に基づく光の輝度の強弱による報知や、所定の色彩と報知判定対象の信号機との方位角差に基づく色彩の強弱(濃淡或いは明暗)による報知などが考えられる。
【0078】
本実施形態によれば、通信装置20は報知判定対象の信号機の現在の信号表示情報に基づいて所定の態様で報知を行うのでユーザ(特に視覚障害者)が安心・安全に横断歩道を横断できる。その際、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定することにより、ユーザが横断歩道に対して或いは横断歩道上を正しい方向に歩いているか否かを知らせることができるので、より安心・安全に横断歩道を横断できる。
[第2実施形態]
本発明の通信装置20の第2実施形態について図3を用いて説明する。図3は本発明の通信装置20の制御部1が実行する処理の流れを示す第2のフローチャートである。なお、本実施形態のステップS11〜ステップS12は第1実施形態のステップS01〜ステップS02と、また、本実施形態のステップS14〜ステップS16は第1実施形態のステップS03〜ステップS05は同様であるため説明を省略する。
【0079】
ステップS13において制御部1は報知判定対象の交差点を特定する。通信装置20と通信可能な路側機が設置された交差点が1つしかない場合には第1実施形態のように報知判定対象の交差点を特定することなく報知判定対象の信号機を特定すればよい(或いはその交差点が自動的に報知対象の交差点として特定される)が、通信装置20と通信可能な路側機が設置された交差点が複数ある場合には報知判定対象の交差点を特定し、その交差点に設置された信号機のいずれかを報知判定対象の信号機と特定することが望ましいからである。なお、ITSにおいて無線通信を行なう際の周波数帯域は700MHz帯の周波数帯域であると考えられている。その場合、通信可能範囲は約300メートルであり、通信装置20は自身を中心として半径約300メートルの範囲内に存在する1又は2以上の路側機から交差点情報を受信する。
【0080】
報知判定対象の交差点を特定する方法について以下詳説する。
【0081】
報知判定対象の交差点を特定する第1の方法は、通信装置20の現在位置と交差点の中心地点の位置座標とに基づいて特定する方法である。すなわち、前述の通り交差点情報には交差点の中心地点の位置座標(緯度・経度)を示す情報が含まれている。そこで制御部1は通信装置20の現在位置から交差点の中心地点までの距離が最も近い交差点を報知判定対象の交差点と特定する。
【0082】
報知判定対象の交差点を特定する第2の方法は、通信装置20の現在位置及び進行方向と交差点に含まれる全ての座標とに基づいて特定する方法である。すなわち交差点が複数個所ある場合においてユーザは、渡りたい横断歩道がある交差点に向かって歩いているものと考えられ、そのような場合に交差点の中心地点の位置座標までの距離の如何を問わずに報知判定対象の交差点を特定するものである。例えば図6において地点Yにユーザがいるときに、交差点の中心地点までの座標は交差点Aよりも交差点Bのほうが近いが、ユーザが進行方向Hの方向に歩いているときには交差点Aが報知判定対象の交差点と特定される。
【0083】
なお、報知判定対象の交差点を特定する第2の方法においては交差点に含まれる全ての座標に基づいて報知対象の交差点を特定しているが、これは、ユーザが交差点に向かって歩く際に交差点の中心地点に向かって歩くとは限られておらず、むしろ横断歩道に向かって歩くことが多いと考えられるからである。
【0084】
交差点に含まれる全ての座標とは図6において破線Qで示すような横断歩道を含む領域に含まれる座標であり、当該領域は例えば交差点に存在する(一つの交差点に設置された複数の信号機に対応付けられた)各横断歩道の始点/終点ノードを結んでなる領域である。そして制御部1は通信装置20の現在位置から通信装置20の進行方向の方位角に延びるベクトルが交差点に含まれる全ての座標のうち、少なくとも1点の座標を通過する場合に、その交差点を報知判定対象の交差点と特定する。
【0085】
なお、通信装置20の進行方向の方位角に延びるベクトルが2箇所以上の交差点を通過することにより報知判定対象の交差点が一つに特定できない場合には、さらに上記報知判定対象の交差点を特定する第1の方法と組み合わせることにより、報知判定対象の交差点を一つに特定することができる。
【0086】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機を報知判定対象の交差点に設置された信号機の中から特定するので、通信装置20と通信可能な路側機が複数存在する場合であっても適切に報知することできる。
【0087】
[第3実施形態]
本発明の通信装置20の第3実施形態について図4を用いて説明する。図4は本発明の通信装置20の制御部1が実行する処理の流れを示す第3のフローチャートである。なお、本実施形態のステップS21〜ステップS25は第2実施形態のステップS11〜ステップS15と、また、本実施形態のステップS27は第1実施形態のステップS05と同様であるため説明を省略する。
【0088】
ステップS26において制御部1はステップS25において算出した報知判定対象の信号機との方位角差(以下、「θ1」という。)が所定の範囲内か否かを判定する。報知判定対象の信号機との方位角差(θ1)が所定の範囲内であれば(ステップS26のY)ステップS27に進み、報知判定対象の信号機との方位角差(θ1)に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。報知判定対象の信号機との方位角差(θ1)が所定の範囲内でなければ(ステップS26のN)ステップS21に戻る。
【0089】
所定の範囲とは任意に設定した範囲としてもよいが、本実施形態においては交差点に応じて所定の範囲を算出する方法について記載する。本実施形態において所定の範囲とは、報知判定対象の信号機を含む複数の信号機が設置されている交差点において、各信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値(以下、「信号表示方向最小方位角差」という。)の1/2(半分)の値(以下、「θ2」という。)に基づいて算出され、「0度≦θ1≦θ2」又は「180−θ2≦θ1≦180」であるときにθ1が所定の範囲内であると判定される。なお、信号表示方向の方位角が異なる信号表示方向間の方位角差としたのは、信号表示方向最小方位角差が0度となるのを防ぐためである。
図6を用いて具体的に説明すると、交差点Bに設置された各信号機の信号表示方向の方位角について、信号機e及び信号機hの信号表示方向の方位角が30度、信号機f及び信号機mの信号表示方向の方位角が90度、信号機gと信号機jの信号表示方向の方位角が270度、信号機iと信号機nの信号表示方向の方位角が210度であるとすると、信号表示方向最小方位角差は│210−270│(210から270を引いた値の絶対値)等の60度であり、通信装置20の進行方向の方位角と報知判定対象の信号機の信号表示方向の方位角との方位角差θ1が「0度≦θ1≦30度」又は「150度(180度−30度)≦θ1≦180度」を満たさない場合には、θ1が所定の範囲内ではないので所定の態様で報知が行われない(図6において「θ2」はいずれも30度であるものとする。)。或いは、報知の強弱を図8に示すように設定する(所定の範囲外における報知の強さをゼロに設定する)ことにより、実質的に所定の態様で報知が行われないようにしてもよい。
本実施形態において所定の範囲を上述のように算出した理由について図6を用いて説明すると、ユーザが地点Zにいる場合、交差点Bに設置された信号機h及び信号機mの現在の信号表示情報に基づいて所定の態様で報知が行われることがある(例えば上述の報知判定対象の信号機を特定する第2の方法によって報知判定対象の信号機を特定した場合)。その際、報知判定対象の信号機との方位角差の如何を問わず報知判定対象の信号機との方位角差に基づいて強弱を設定することとすると、現在の報知が一つの信号機(信号機h若しくは信号機m)の現在の信号表示情報に基づく報知なのか、複数の信号機(信号機h及び信号機m)の現在の信号表示情報に基づく報知が重複した報知なのかが不明となる。
そこで複数の信号機の現在の信号表示情報に基づく報知が重複した報知を防ぐために、信号表示方向最小方位角差の1/2(半分)の値に基づいて所定の範囲を設定し、報知判定対象の信号機との方位角差が所定の範囲内ではないときは報知しない。これにより、ユーザが地点Zにいるときのみならず、交差点Bに設置された信号機の現在の信号表示情報に基づいて報知される位置にユーザがいる限り、複数の信号機の現在の信号表示情報に基づく報知が重複した報知が行われることを防ぐことができる。
すなわち、信号表示が赤信号及び青信号のどちらでも報知する場合において(例えば、赤信号なら振動し、青信号なら音声で「青信号です。」と報知する場合)、複数の信号機(信号機h及び信号機m)共に、図7に示すような報知の強弱設定を行なうと、複数の信号機(信号機h及び信号機m)の現在の信号表示情報に基づく報知が重複した報知(赤信号示す振動及び青信号を示す音声報知)が行なわれる。(例えば、複数の信号機の信号表示方向間の方位角差が90度で、通信装置20の進行方向の方位角が45度の場合)
ここで、全ての交差点における横断歩道が正方形(ひとつの角度が90度)で構成されていれば、例えば、一律に「0度≦θ1≦45度」を所定の範囲としてもよいが、正方形でない交差点が存在するため信号表示方向最小方位角差を用いることが好ましい。特に、2つの横断歩道がなす角度が90度以下の場合に顕著に効果が現れる。
つまり、図6の地点Zにいる場合に交差点Bに設置された信号機hの信号表示が青信号であり、信号機hとの方位角差(θ1)が44度の場合に、一律に「0度≦θ1≦45度」を所定の範囲としていた場合、青信号を知らせる報知がなされてしまう。しかしながら、交差点Bにおける信号機hとの方位角差(θ1)が44度の場合とは、信号機hと信号機mとの信号表示方向間の方位角差の1/2(30度)超えており、信号機mを向いていると考えられるため、青信号を知らせる報知を行なわないことが好ましい。
なお、信号表示方向最小方位角差は、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値ではなく、報知判定対象の信号機を特定する第2の方法で特定した2つの信号機の信号表示方向間の方位角差でもよい。
なお、交差点に設置された各信号機の信号表示方向の方位角が全て、当該交差点を形成するいずれかの道路(道路が複数の車線により構成されているときは、車線)に対応付けられた進行方向の方位角と平行であるときは、信号表示方向最小方位角差を、当該交差点を形成する道路同士がなす角(但し、0度≦道路同士がなす角≦90度)としてもよいが、交差点に設置された各信号機の信号表示方向の方位角のうち、一つでも当該交差点を形成する道路に対応付けられた進行方向の方位角と平行でないものがある場合には本実施形態と同様に、信号表示方向最小方位角差を、各信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差が最も小さい値とすることが望ましい。
【0090】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機との方位角差が所定の範囲内でないときは報知を行わないので、複数の信号機の現在の信号表示情報に基づく報知が重複した報知が行われることを防ぐことができる。
[第4実施形態]
本発明の通信装置20の第4実施形態について図5を用いて説明する。図5は本発明の通信装置20の制御部1が実行する処理の流れを示す第4のフローチャートである。なお、本実施形態のステップS31〜ステップS36は第3実施形態のステップS21〜ステップS26と、また、本実施形態のステップS38は第1実施形態のステップS05と同様であるため説明を省略する。
【0091】
ステップS37において制御部1は報知判定対象の信号機が前方の信号機か否かを判定する。報知判定対象の信号機が前方の信号機であるときは(ステップS37のY)ステップS38に進み、報知判定対象の信号機との方位角差に基づいて報知の強弱を設定すると共に、当該報知判定対象の信号機の現在の信号表示情報に基づいて報知部を制御して所定の態様で報知を行う。報知判定対象の信号機が前方の信号機でなければ(ステップS37のN)ステップS31に戻る。
【0092】
報知判定対象の信号機が前方の信号機か否かは通信装置20の現在位置及び進行方向と、報知判定対象の信号機の位置座標或いは報知判定対象の信号機に対応付けられた横断歩道の始点/終点ノードの位置座標(以下、本ステップにおいて「ノード位置座標」という。)とに基づいて判定する。
【0093】
本実施形態においては、通信装置20の現在位置及び進行方向とノード位置座標とに基づいて判定する場合を例に説明するが、通信装置20の現在位置及び進行方向と報知判定対象の信号機の位置座標とに基づいて判定する場合も同様の方法で判定することができる。
【0094】
最初に、制御部1は通信装置20の現在位置からノード位置座標へ向かう方向(通信装置20の現在位置とノード位置座標とを結ぶ直線において、通信装置20の現在位置を中心としたノード位置座標への方向であり、以下、「方向A」という。)の方位角を算出する。
【0095】
そして制御部1は方向Aの方位角と通信装置20の進行方向の方位角との方位角差を算出し、当該方位角差が「0度以上90度以下」であるときに報知判定対象の信号機が前方の信号機であると判定する。
【0096】
言い換えると、通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±90度の範囲に報知判定対象の信号機に対応付けられた横断歩道の始点/終点ノードが存在するときに報知判定対象の信号機が前方の信号機であると判定する。
【0097】
なお、本実施形態では上述の通り「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±90度の範囲」を「前方」として報知判定対象の信号機が前方の信号機であるか否かを判定しているが、当該範囲は90度以外の任意の角度に設定することができ、例えば「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±45度の範囲」を「前方」とすることによって「前方」の範囲を本実施形態に比べて狭くすることとしてもよいし、「通信装置20の現在位置を中心として通信装置20の進行方向の方位角に対し、±135度の範囲」を「前方」とすることによって「前方」の範囲を本実施形態に比べて広くすることとしてもよい。
【0098】
本実施形態によれば、第1実施形態と同様の効果を奏する。加えて、報知判定対象の信号機が前方の信号機でない場合には報知が行われないので横断しない横断歩道に設置された信号機の現在の信号表示情報に基づいて報知がされることを防ぐことができる。
[変形例]
上記の実施形態では、報知判定対象の信号機を特定したが、報知判定対象の信号機を特定しなくても構わない。なお、以下の説明においては、進行許可信号表示(青信号)のときのみ報知する場合を例示する。
【0099】
まず、制御部1は通信部7を介して交差点情報及び信号機情報を取得する。
【0100】
次に、制御部1は信号機情報に含まれる信号機の現在の信号表示情報(信号機の表示色を示す情報)に基づき、現在の信号表示が進行許可信号表示(青信号)である信号機を特定する。そして、特定した信号機に対応付けられた信号表示方向情報(信号表示方向の方位角)と通信装置20の進行方向の方位角との方位角差を算出する。そして、算出した方位角差に基づいて報知の強弱を設定する(図7参照)。
【0101】
これにより、現在の信号表示が進行許可信号表示(青信号)である信号機の信号表示方向の方位角に対して、通信装置20の進行方向の方位角との方位角差が90度であれば(青信号の信号機に対して真横を向いていれば)、報知されることがなく、方位角差が180度であれば、(青信号の信号機に対して正面を向いていれば)、強く報知される。なお、図7のように方位角差が180度から90度に近づくにつれて報知は弱く(小さく)なっていく。
【0102】
この方法によれば、報知判定対象の信号機を特定せずとも、現在の信号表示が進行許可信号表示(青信号)である信号機の方向をユーザが向いているか否かを判定できる。なお、現在の信号表示が進行許可信号表示(青信号)である信号機を報知判定対象の信号機として特定してもよい。
【0103】
また、その他にも、上記の実施形態では、信号機情報には信号機毎に、信号機に対応付けられた信号表示方向情報(信号機の信号表示方向の方位角を示す情報)、信号機の現在の信号表示情報(信号機の表示色を示す情報)が含まれたが、これに限ることはない。すなわち、通常、対向する信号機(図6における信号機I及び信号機M)は同じ信号表示を行なうものと考える。そのため、図6の交差点Aのような四叉路では、信号機情報として、4つの現在の信号表示情報(信号機の表示色を示す情報)と、8つの信号表示方向情報が含まれることが考えられる。なお、この場合、1つの現在の信号表示情報に2つの信号表示方向情報が対応付けられる。すなわち、図6における信号機I及び信号機Mを1つの信号機とし、当該信号機の現在の信号表示情報と、当該信号機の信号表示方向情報(信号機Iの信号表示方向情報及び信号機Mの信号表示方向情報)が含まれても良い。
【0104】
なお、この場合、横断歩道の始点/終点ノードも同様にひとつの現在の信号表示情報に対して2つの横断歩道の始点/終点ノードが対応付けられる。そのため、上記第4実施形態のように進行方向と、信号機の位置座標或いは当該信号機に対応付けられた横断歩道の始点/終点ノードの位置座標とに基づいて判定する場合は、2つの信号機の位置座標或いは2つの横断歩道の始点/終点ノード共に、通信装置20の進行方向の方位角の「±90度以下」の範囲内でないときに前方の信号機でないと判定することが好ましい。
【0105】
さらに、上記の実施形態では、信号機のある交差点に路側器が設置された場合を例示したが、交差点でなくとも、例えば、自動車の右左折に関係なく、歩行者が道路を横断するための信号機付きの横断歩道に路側器が設置されていてもよく、この場合では、横断歩道の両端に設置された対向する信号機を別々として、又は、1つの信号機とし、信号機の現在の信号表示情報と、信号機の信号表示方向情報が送信される。そして、通信装置20は制御部1は通信部7を介して信号機情報を取得し、信号機情報に含まれる信号機の信号表示方向情報(信号表示方向の方位角は2つ存在し、一方と他方は180度異なる)と通信装置20の進行方向の方位角との方位角差を算出し、その方位角差に基づいて報知の強弱を設定してもよい。そして、設定した報知の強弱及び信号機の現在の信号表示に基づく報知を行なう。例えば、方位角差が180度で信号機の現在の信号表示が赤信号であれば、大音量で「赤信号です。」と音声出力を行なう。なお、この場合において、信号表示方向の方位角は2つ存在するため、通信装置20の進行方向の方位角との方位角差も2つ存在する。そのため、算出した方位角差のうち、小さい方位角差を用いることが好ましい。
【0106】
また、上記の実施形態では、方位角差に基づいて報知の強弱を設定したが、報知の強弱ではなく、報知の形態を設定するものであっても良い。例えば、方位角差が180度〜150度であれば、音声出力とし、方位角差が149度〜90度であれば振動などの設定としてもよい。
【産業上の利用可能性】
【0107】
本発明はユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置に利用することができる。
【符号の説明】
【0108】
1・・・制御部、2・・・表示部、3・・・操作部、4・・・現在位置検出部、5・・・進行方向検出部、6・・・地図情報記憶部、7・・・通信部、8・・・報知部、20・・・通信装置
【特許請求の範囲】
【請求項1】
他の通信装置と通信を行う通信装置であって、
少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、
前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づく報知設定及び前記信号機の現在の信号表示情報に基づく報知を報知部を制御して行う制御部と、
を備える通信装置。
【請求項2】
前記制御部は、少なくとも前記信号機情報に基づいて報知対象判定の信号機を特定して、前記通信装置の進行方向の方位角と、前記報知対象判定の信号機の信号表示方向の方位角とから前記方位角差を算出することを特徴とする請求項1に記載の通信装置。
【請求項3】
前記通信装置はさらに、
前記通信装置の現在位置を検出する現在位置検出部を備え、
前記制御部は、地図情報を取得して前記通信装置の現在位置から最も近い横断歩道の始点/終点ノードを特定し、
前記報知判定対象の信号機は、特定された前記横断歩道の始点/終点ノードが、信号機に対応付けられた横断歩道の始点/終点ノードと一致する信号機であることを特徴とする請求項2に記載の通信装置
【請求項4】
前記通信装置はさらに、
前記通信装置の現在位置を検出する現在位置検出部を備え、
前記制御部は、地図情報を取得して前記通信装置の現在位置の属する歩道を特定し、
前記報知判定対象の信号機は、特定された前記歩道が、信号機に対応付けられた歩道と一致する信号機であることを特徴とする請求項2に記載の通信装置。
【請求項5】
前記制御部は、前記通信装置の進行方向の方位角と、前記信号機情報に含まれる信号機に対応付けられた信号表示方向の方位角とが対向方向又は同一方向であるかを判定し、
前記報知判定対象の信号機は、信号機に対応付けられた信号表示方向の方位角が、前記通信装置の進行方向の方位角と対向方向又は同一方向である信号機であることを特徴とする請求項2又は請求項4に記載の通信装置。
【請求項6】
前記通信部はさらに交差点情報を受信し、
前記報知判定対象の信号機は、報知判定対象の交差点に設置された信号機であって、
前記報知判定対象の交差点は、少なくとも前記通信装置の現在位置と前記交差点情報とに基づいて特定されることを特徴とする請求項2〜請求項5のいずれか1項に記載の通信装置。
【請求項7】
前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことを特徴とする請求項1に記載の通信装置。
【請求項8】
前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことを特徴とする請求項2〜請求項6のいずれか1項に記載の通信装置。
【請求項9】
前記所定の範囲は、複数の信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差に基づいて定められることを特徴とする請求項7又は請求項8に記載の通信装置。
【請求項10】
前記制御部は前記報知判定対象の信号機が前方の信号機であるか否かを判定し、前記報知判定対象の信号機が前方の信号機でないときには報知を行わないことを特徴とする請求項2〜請求項6又は請求項8のいずれか1項に記載の通信装置。
【請求項11】
前記報知は、前記通信装置に備えられた音声出力部を介した音声案内であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項12】
前記報知は、前記通信装置に備えられた振動機能による振動であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項13】
前記報知は、前記通信装置に備えられた表示部への光又は色彩の表示であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項14】
前記報知設定は、前記報知の強弱であることを特徴とする請求項1〜請求項13のいずれか1項に記載の通信装置。
【請求項1】
他の通信装置と通信を行う通信装置であって、
少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、
前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づく報知設定及び前記信号機の現在の信号表示情報に基づく報知を報知部を制御して行う制御部と、
を備える通信装置。
【請求項2】
前記制御部は、少なくとも前記信号機情報に基づいて報知対象判定の信号機を特定して、前記通信装置の進行方向の方位角と、前記報知対象判定の信号機の信号表示方向の方位角とから前記方位角差を算出することを特徴とする請求項1に記載の通信装置。
【請求項3】
前記通信装置はさらに、
前記通信装置の現在位置を検出する現在位置検出部を備え、
前記制御部は、地図情報を取得して前記通信装置の現在位置から最も近い横断歩道の始点/終点ノードを特定し、
前記報知判定対象の信号機は、特定された前記横断歩道の始点/終点ノードが、信号機に対応付けられた横断歩道の始点/終点ノードと一致する信号機であることを特徴とする請求項2に記載の通信装置
【請求項4】
前記通信装置はさらに、
前記通信装置の現在位置を検出する現在位置検出部を備え、
前記制御部は、地図情報を取得して前記通信装置の現在位置の属する歩道を特定し、
前記報知判定対象の信号機は、特定された前記歩道が、信号機に対応付けられた歩道と一致する信号機であることを特徴とする請求項2に記載の通信装置。
【請求項5】
前記制御部は、前記通信装置の進行方向の方位角と、前記信号機情報に含まれる信号機に対応付けられた信号表示方向の方位角とが対向方向又は同一方向であるかを判定し、
前記報知判定対象の信号機は、信号機に対応付けられた信号表示方向の方位角が、前記通信装置の進行方向の方位角と対向方向又は同一方向である信号機であることを特徴とする請求項2又は請求項4に記載の通信装置。
【請求項6】
前記通信部はさらに交差点情報を受信し、
前記報知判定対象の信号機は、報知判定対象の交差点に設置された信号機であって、
前記報知判定対象の交差点は、少なくとも前記通信装置の現在位置と前記交差点情報とに基づいて特定されることを特徴とする請求項2〜請求項5のいずれか1項に記載の通信装置。
【請求項7】
前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことを特徴とする請求項1に記載の通信装置。
【請求項8】
前記制御部は、前記方位角差が所定の範囲内であるか否かを判定し、前記方位角差が所定の範囲内ではないときには報知を行わないことを特徴とする請求項2〜請求項6のいずれか1項に記載の通信装置。
【請求項9】
前記所定の範囲は、複数の信号機の信号表示方向の方位角のうち、信号表示方向の方位角が異なる信号表示方向間の方位角差に基づいて定められることを特徴とする請求項7又は請求項8に記載の通信装置。
【請求項10】
前記制御部は前記報知判定対象の信号機が前方の信号機であるか否かを判定し、前記報知判定対象の信号機が前方の信号機でないときには報知を行わないことを特徴とする請求項2〜請求項6又は請求項8のいずれか1項に記載の通信装置。
【請求項11】
前記報知は、前記通信装置に備えられた音声出力部を介した音声案内であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項12】
前記報知は、前記通信装置に備えられた振動機能による振動であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項13】
前記報知は、前記通信装置に備えられた表示部への光又は色彩の表示であることを特徴とする請求項1〜請求項10のいずれか1項に記載の通信装置。
【請求項14】
前記報知設定は、前記報知の強弱であることを特徴とする請求項1〜請求項13のいずれか1項に記載の通信装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−113424(P2012−113424A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−260319(P2010−260319)
【出願日】平成22年11月22日(2010.11.22)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月22日(2010.11.22)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]