
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部31と、スポットライト24と、複数の画像から距離画像のデータを生成する立体計測部33と、距離画像に基づいて、停止物体の検出を行う検出処理部P1と、停止物体にスポットライト24の光を照射させるためのライト点灯信号を出力する追加処理部Q1と、ライト点灯信号に基づいて、スポットライト24の照射位置を停止物体の位置に変更させる制御を行うライト制御部41とを有する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部31と、スポットライト24と、複数の画像から距離画像のデータを生成する立体計測部33と、距離画像に基づいて、停止物体の検出を行う検出処理部P1と、停止物体にスポットライト24の光を照射させるためのライト点灯信号を出力する追加処理部Q1と、ライト点灯信号に基づいて、スポットライト24の照射位置を停止物体の位置に変更させる制御を行うライト制御部41とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通行車両監視システム及び車両用監視カメラに関する。
【背景技術】
【0002】
従来より、道路上を通行する車両の事故防止等のために車両監視システムが広く実用化されている。車両監視システムには、車両を撮影した画像の車両のナンバープレートから車両番号を認識するもの、運転席画像を記録するもの、等がある。
【0003】
また、特にトンネル内で発生する所定の事象を監視し、事故の発生を未然に防止するために情報掲示板にメッセージを表示し、さらに毒物を運搬する車両を検出するトンネル内監視システムも提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−272086号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のいずれの監視装置あるいは監視システムも、撮影画像から対象物の立体的な大きさは認識することができない。
例えばトンネル内で道路上の落下物が新聞紙のような薄い物であれば、事故の発生する危険度は高くないが、落下物が段ボール箱のような立体的な物であれば、事故の発生する危険度は高い。また、撮影された対象物の実際の大きさ及びその立体形状が不明なため、物の認識、例えば人の認識、の精度も低い。
【0006】
また、例えばトンネルの場合、法令等により所定の長さ以上のトンネルにのみ監視カメラの設置義務がなく、かつ監視カメラの設置コストが高いため、監視カメラの設置がされていないトンネルが多く、さらに監視カメラが設置されているトンネルでも、カメラの設置台数も少ない、という問題がある。
さらに、複数の監視カメラからの画像情報は、監視室の装置に集中的に集められて画像処理が行われるため、車両毎の状況、例えば各車両の走行状況、を分析するには、その画像処理を行う装置の負荷が大きくなってしまうという問題もある。
【0007】
さらにまた、例えばトンネル内において、事故または故障により車両が停止する、あるいは、落下物が存在する場合、トンネル内は薄暗いため、後続の車両のドライバは、停止した車両あるいは落下物等の停止物体の認識が遅れることがある。そのため、後続の車両が停止物体に衝突する、あるいは、停止物体を急に避けることで事故に繋がるという問題もある。
【0008】
そこで、本発明は、道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一態様によれば、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラと、その複数の監視カメラに接続されたセンタ装置とからなる通行車両監視システムであって、各監視カメラは、複数の撮像部と、少なくとも1つのスポットライトと、前記スポットライトの照射位置を変更させる照射位置変更部と、前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、を有することを特徴とする通行車両監視システムを提供することができる。
【発明の効果】
【0010】
本発明によれば、道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態に係わる通行車両監視システムの構成を説明するための図である。
【図2】本発明の実施の形態に係わる、トンネル内における監視カメラの設置状況を示す図である。
【図3】本発明の実施の形態に係わる監視カメラの外観斜視図である。
【図4】本発明の実施の形態に係わる監視カメラの平面図である。
【図5】本発明の実施の形態に係わるスポットライトユニットの構成を説明するための図である。
【図6】本発明の実施の形態に係わる監視カメラ2の内部構成を示すブロック図である。
【図7】本発明の実施の形態に係わる基本監視処理の流れの例を示すフローチャートである。
【図8】本発明の実施の形態に係わるコマンド処理の流れの例を示すフローチャートである。
【図9】図7及び図8における異常処理の流れの例を示すフローチャートである。
【図10】図9におけるライト処理の流れの例を示すフローチャートである。
【図11】本発明の実施の形態に係わる、センタ装置4における異常処理の流れの例を示すフローチャートである。
【図12】図11におけるライト処理の流れの例を示すフローチャートである。
【図13】本発明の実施の形態に係わる、モニタ6上に表示される監視画面の例を示す図である。
【図14】図13の画面の表示処理の流れの例を示すフローチャートである。
【図15】本発明の実施の形態に係わるログデータのデータ構造を示す図である。
【図16】本発明の実施の形態に係わる、センタ装置4における車両IDの関連付けを説明するための図である。
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。
(システム構成)
まず図1に基づき、本実施の形態に係わるシステムの構成を説明する。図1は、本実施の形態に係わる通行車両監視システムの構成を説明するための図である。図2は、トンネル内における監視カメラの設置状況を示す図である。図3は、監視カメラの外観斜視図である。図4は、監視カメラの平面図である。図5は、スポットライトユニットの構成を説明するための図である。
【0013】
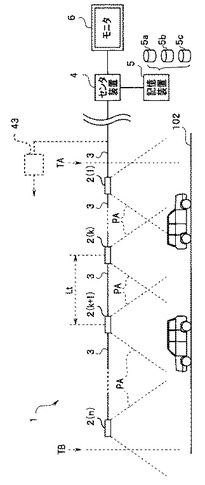
図1に示すように、トンネル内を監視する交通監視システム1は、それぞれがステレオカメラである複数の監視カメラ2と、隣り合う2台の監視カメラ2を接続する通信ケーブル3と、複数の監視カメラ2の中の1台と通信ケーブル3により接続されたセンタ装置4と、センタ装置4に接続された記憶装置5と、センタ装置4に接続された画像表示装置であるモニタ6とを含んで構成されている。
【0014】
図1に示すように、トンネル101の一端TAに設置される監視カメラ2(1)から他端TBまでの監視カメラ2(n)のn台(nは整数)の監視カメラ2が、トンネル内の天井側に、略等間隔に配置されている。図1では、各監視カメラ2には、識別番号が付されて示されている。1番目の監視カメラ2(1)からn番目の監視カメラ2(n)までが、通信ケーブル3で数珠繋ぎに接続され、監視カメラ2(1)がセンタ装置4に接続されている。なお、以下の説明で、特定の監視カメラを指さない場合は、監視カメラ2と表記する。
【0015】
通信ケーブル3は、電源供給可能な信号線であり、例えば、電源供給も可能なパワー・オーバ・イーサネット(登録商標)(PoE)対応のケーブルである。センタ装置4は、電源回路を含み、電源回路の電源は、通信ケーブル3を介して各監視カメラ2に供給される。
【0016】
センタ装置4、記憶装置5及びモニタ6は、例えば、監視室に配置されている。センタ装置4には、記憶装置5とモニタ6が接続されており、センタ装置4は、所定のデータを記憶装置5に記憶し、モニタ6に監視用画面を表示する。よって、監視員は、センタ装置4を操作して、モニタ6に所望の画像を表示させることができる。記憶装置5には、後述する、各種データを記憶する複数の記憶部5a,5b,5cを含む。
【0017】
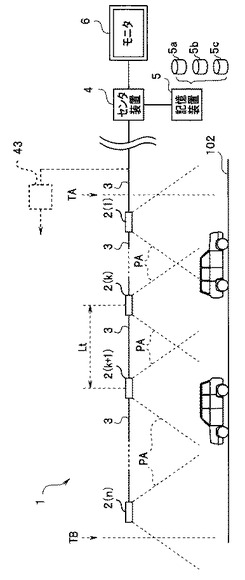
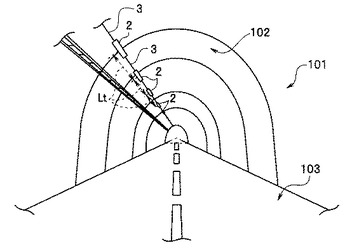
図1に示すように、複数の監視カメラ2が、通信ケーブル3によりデイジーチェーン接続されて、すなわち数珠繋ぎで接続されて、センタ装置4に接続されている。図2に示すように、各監視カメラ2は、トンネル101の内壁の天井部分102の最も高い位置よりもやや低いところに、トンネル101の経路方向に沿って、所定の間隔Ltを持って設置されている。所定の間隔Ltは、隣り合う監視カメラ2の撮影範囲PAが一部重なるように、設定される。所定の間隔Ltは、例えば10mである。
【0018】
監視カメラ2間の通信及び監視カメラ2とセンタ装置4間の通信は、イーサネット(登録商標)を利用したデータ通信である。各監視カメラ2からのデータは、デイジーチェーン接続のネットワークを介して、センタ装置4へ送信可能である。また、センタ装置4も、全てのあるいは所望の監視カメラ2へ、撮影画像の送信要求のコマンド、等の各種コマンドを送信することができる。従って、センタ装置4は、監視カメラ2からの動画像の画像情報、認識情報、イベント情報等を、センタ装置4からのコマンドに応じて、デイジーチェーン接続のネットワークを介して、取得することができる。
なお、図1では、センタ装置4が1つのトンネルを監視する例であるが、センタ装置4は、複数のトンネルを監視するようにしてもよい。
【0019】
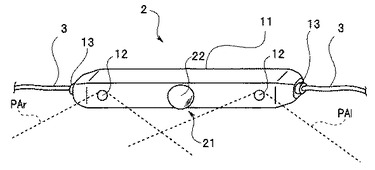
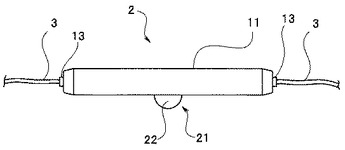
図3に示すように、車両用監視カメラである監視カメラ2は、細長い直方体の形状のケーシング11を有する。2つの対物光学系12が、細長いケーシング11の一側面に、所定の距離だけ離れて光軸が互いに平行になるように設けられている。ケーシング11内には、各対物光学系の結像位置に、CMOSイメージセンサ等の撮像素子が設けられている。
【0020】
また、ケーシング11の2つの対物光学系12の設けられた面の略中央には、スポットライトユニット21が設けられている。なお、各監視カメラ2は、1つのスポットライトユニットを有する例で説明するが、2つ以上のスポットライトユニットを有していてもよい。
【0021】
図3及び図4に示すように、スポットライトユニット21は、略半球体の形状を有するカバー22を備える。このカバー22は、後述するスポットライトからの光を透過させるため、透明または半透明の部材で構成されている。2つの対物光学系12及びスポットライトユニット21の設けられた面が、道路面103に対向するように、各監視カメラ2は、天井部分102に設置される。
【0022】
なお、ここでは、各監視カメラ2は、ステレオ撮像のために2つの撮像素子を有している例で説明するが、撮像素子は、3つ以上でもよく、少なくとも2つの撮像素子を有していればよい。
【0023】
また、ケーシング11の両端面には、通信ケーブル3を接続するためのコネクタ13が設けられており、複数の監視カメラ2を互いにデイジーチェーン接続することができる。
上述したように、通信ケーブル3は、イーサネット(登録商標)通信用のケーブルであって、電源供給も可能なイーサネット(登録商標)PoE対応のケーブルであるので、監視カメラ2(1)をセンタ装置4に接続し、隣り合う監視カメラ2同士を、通信ケーブル3で接続するだけでよく、監視カメラ2の設置及び増設は容易である。
【0024】
監視カメラ2の1つの撮像部は、視野範囲PArを有し、他方の撮像部は、視野範囲PAlを有する。2つの視野範囲により、監視カメラ2の撮影範囲PAが決定される。
【0025】
センタ装置4は、コンピュータ装置であり、CPU(中央処理装置)、ROM、RAMなどを含み、各監視カメラ2からのデータを受信すると共に、各監視カメラ2へ各種コマンドを送信して、情報を取得することができると共に、各種データ処理を実行することができる。
【0026】
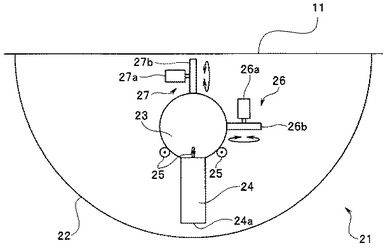
図5に示すように、スポットライトユニット21は、カバー22内に、球体部材23と、スポットライト24と、球体部材23を支持する複数の支持ローラ25と、球体部材23の垂直方向軸に対して球体部材23を回動させる駆動部26と、球体部材23の水平方向軸に対して球体部材23を回動させる駆動部26とを有する。
【0027】
スポットライト24は、球体部材23の表面からレンズ部24aが突出するように、球体部材23に設けられている。このスポットライト24は、内部にLED等の光源を有していて、直線状の光を出射するものである。
【0028】
駆動部26は、モータ26aと、モータ26aに支持部材を介して固着された円盤状のローラ26bとを有して構成されている。ローラ26bは、球体部材23の横側表面に当接されており、モータ26aからの回動力、すなわち、駆動力を球体部材23に伝達する。
【0029】
また、駆動部27は、モータ27aと、モータ27aに支持部材を介して固着された円盤状のローラ27bとを有して構成されている。ローラ27bは、球体部材23の上側表面に当接されており、モータ27aからの回動力、すなわち、駆動力を球体部材23に伝達する。これにより、球体部材23に設けられたスポットライト24の位置が自由に変更され、スポットライト24は、道路面上の所定の位置に光を照射することができる。このように、駆動部26及び27は、スポットライト24の照射位置を変更する照射位置変更部を構成する。
【0030】
(監視カメラの構成)
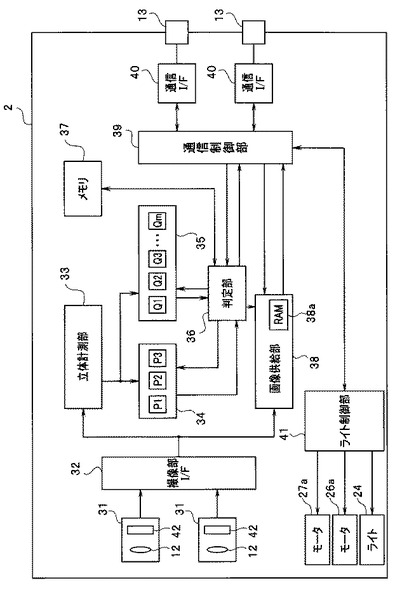
図6は、監視カメラ2の内部構成を示すブロック図である。
監視カメラ2は、2つの撮像部31、撮像部インターフェース部(以下、撮像部I/Fという)32、立体計測部33、基本監視部34、追加監視部35、判定部36、メモリ37、画像供給部38、通信制御部39、2つの通信インターフェース部(以下、通信I/Fという)40、ライト制御部41、及び2つのコネクタ13を含んで構成されている。
【0031】
監視カメラ2の一部の機能は、監視カメラ2に搭載された中央処理装置(CPU)によって実行されるソフトウェアプログラムにより、実現される。例えば、立体計測部33、基本監視部34、追加監視部35及び判定部36は、ソフトウェアプログfラムにより実現される。なお、監視カメラ2の一部の機能は、デジタル・シグナル・プロセッサ(DSP)により、実現してもよい。
【0032】
各撮像部31は、対物レンズである対物光学系12と、対物光学系12の結像位置に配設されたCMOSイメージセンサ等の撮像素子42を有する。各撮像素子42により撮像して得られた画像データは、撮像部I/F32を介して、立体計測部33と画像供給部38に供給される。
【0033】
立体計測部33は、2つの画像データから距離画像のデータを生成する距離画像生成部である。距離画像のデータは、入力された2つの画像データから、各画素値が距離値である画像データである。立体計測部33は、距離画像データを生成する。なお、距離画像は、各画素値が3次元空間内の位置情報でもよい。立体計測部33は、生成した距離画像の情報を基本監視部34と追加監視部35に供給する。
【0034】
基本監視部34は、距離画像に基づく、停止物体の検出等の、所定の監視処理を実行する基本監視機能の処理を実行する第1の監視処理部である。
本実施の形態では、基本監視部34は、基本監視機能の監視処理部として、停止物体の検出処理部P1と物体の軌跡の検出処理部P2を含む。基本監視部34は、これらの監視処理部とは別に、計測及び記録処理部P3を含む。なお、本実施の形態では、これら3つの処理部P1,P2,P3を基本監視機能の処理部としているが、基本監視機能の処理は、これらに限定されず、他の処理を基本監視部34に含めてもよい。
【0035】
停止物体の検出処理部P1は、ステレオ処理により得られた距離画像から、停止物体を認識して検出する処理を行う。例えば、停止物体の検出処理部P1は、距離画像から認識して得られた物体の位置が、所定の時間以上移動しない状態にあるか否かを判定し、その物体の位置が所定の時間以上移動しない場合に、停止物体ありの異常を、検出する。停止物体は、例えば、停止した車両、道路上の落下物などである。停止物体の検出処理部P1が、距離画像に基づいて、停止物体の検出を行う停止物体検出処理部を構成する。
【0036】
物体の軌跡の検出処理部P2は、距離画像から物体を認識し、認識して得られた物体に関する、位置の変化(道路平面上の位置の変化)から得られた軌跡が所定の軌跡に合致するかしないか、言い換えれば得られた軌跡が所定の軌跡と不一致であるか否か、を検出する処理を行う。所定の軌跡とは、例えば移動物体の軌跡が略直線状である軌跡である。軌跡は、認識された物体の位置、例えば重心位置、の変化である。物体の進行方向に対する移動量が所定量以上であるような蛇行運転の軌跡は、この所定の軌跡に合致しないという異常として、検出される。
【0037】
計測及び記録処理部P3は、距離画像から物体を認識し、認識して得られた各物体の位置の変化量から各物体の速度(例えば車速)、所定の時間内に撮像領域内を通過した車両の数(すなわちカウント値)、監視領域に入った時刻及び位置、監視領域から出た時刻及び位置、色などの属性データ、等の計測あるいは認識を行う計測処理を行う。
【0038】
さらに、計測及び記録処理部P3は、認識された通行車両の識別情報を生成して、上述した計測データと、その識別情報を関連付けて、ログデータとして、記憶部であるメモリ37に記録する記録処理を含む。すなわち、計測及び記録処理部P3は、距離画像に基づいて認識された通行車両の識別情報を生成して、その識別情報と、その認識された通行車両についての時刻情報等とをメモリ37に記録する記録処理部を構成する。ここでは、ログデータは、基本監視部34から判定部36を介してメモリ37に記憶される。なお、ログデータの記録は、基本監視部34がメモリ37に直接書き込むようにしてもよい。
追加監視部35は、基本監視部34の監視処理とは別の追加監視機能の処理を実行する第2の監視処理部である。具体的には、追加監視部35は、異常の内容に応じた異常処理、センタ装置4からのコマンドに応じたコマンド対応処理、等の処理を行うための、複数の追加処理部Q1,Q2,Q3,・・・Qmを含む(mは整数)。なお、図6において、追加処理部Q1,Q2が異常有りの判定時に実行すべき処理部であり、追加処理部Q3〜Qmがコマンド対応処理のための処理部である。
【0039】
異常処理は、基本監視部34において検出された異常の内容に応じて、判定部36により選択されて実行される処理である。基本監視部34において異常が検出されたときに実行される追加処理部が、異常時の処理部として、追加監視部35に含まれる。
【0040】
例えば、停止物体の検出に対応する追加処理部Q1は、静止画データに基づいて、停止物体が車両であるのか、人であるのかを判定して、車両の場合は、破損状況、停止位置、向き(すなわち道路の走行方向に対して平行な方向を向いているのか、斜め方向を向いているのか)、大きさ、車両の台数、等々の検出をし、人の場合は、その位置、姿勢(横になっているのか(倒れているのか)、道路上に立っているのか、等)、人数、等々の検出をする処理部である。停止物体の大きさは、距離画像データから算出あるいは推定することができ、さらに、形状の情報から、停止物体が人であるか否かの判定をすることができる。
【0041】
また、停止物体の検出に対応する追加処理部Q1は、停止物体の位置情報に基づき、停止物体の位置を検出するとともに、停止物体にスポットライト24の光を照射させるライト点灯処理を実行する。このライト点灯処理により、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。この追加処理部Q1が、停止物体の位置を検出するとともに、停止物体にスポットライト24の光を照射させるためのライト点灯信号を出力するライト点灯処理部を構成する。なお、ライト制御部41によって実行される処理については、後述する。
【0042】
また、物体の軌跡が所定の軌跡に合致しない場合に対応する追加処理部Q2は、後述するRAM38aの動画データ(すなわち複数のフレームデータ)又はメモリ37に格納されたログデータに基づいて、車線変更であるのか、減速であるのか、物体の分離であるのか、を判定する。車線変更は、車両の避走、蛇行、回転(スピン)、接触(壁面への接触、車両同士の接触)、等を検出することによって、判定することができる。減速は、ログデータに基づいて判定することができる。
【0043】
さらに、物体の軌跡から、車両から分離した物の有無を検出することができる。よって、分離の検出と、落下物の大きさ及び落下物が人であるか否かの判定とをすることができるので、車両から荷物が落下したのか、二輪車が転倒して人が投げ出されているのか、車両から降りた人の移動方向、等の検出をすることができる。
以上のように、追加監視部35は、基本監視部34の処理結果に基づいて、実行可能に構成されている。
【0044】
また、追加監視部35中のコマンド対応処理とは、ログデータ送信コマンド、人検出コマンド、画像送信コマンド、ライト点灯コマンド、ライト危険点灯コマンド、等のセンタ装置4からのコマンドに応じて、判定部36等により指定されて実行される処理である。コマンドに応じて実行される追加処理部が、追加監視部35に含まれる。センタ装置4からのコマンドは、通信制御部39を介して、判定部36および画像供給部38に供給される。追加監視部35は、コマンドに基づいて、距離画像に基づく監視処理を実行する。
【0045】
例えば、ログデータ送信コマンドに対応するログデータ送信処理Q3は、センタ装置4からのコマンドがログデータの送信を指示するコマンドである場合に、コマンドで指定された、メモリ37に格納されているログデータを読み出して送信する処理である。人検出コマンドに対応する人検出処理Q4は、センタ装置4からのコマンドが人の検出を指示するコマンドである場合に同様に実行され、撮像画像の中から人を検出して、検出結果をセンタ装置4へ送信する処理である。監視カメラ2の画像データは、距離データであるので、人を正確に検出することができる。
【0046】
画像送信コマンドに対応する画像送信処理Q5は、センタ装置4からのコマンドが画像データの送信を指示するコマンドである場合に通信制御部39が画像供給部38から画像データを読み出して、監視カメラ2で撮像して得られた画像データを送信する処理である。センタ装置4からのコマンドには複数の種類があり、また一つのコマンドが複数の追加処理を実行させるようなコマンドも有るので、追加監視部35は、そのコマンドに対応する処理を実行するに必要な数の処理部を含む。
【0047】
ライト点灯コマンドに対応するライト点灯処理Q6は、センタ装置4からのコマンドが停止物体にスポットライト24の光を照射させる場合に実行され、追加処理部Q1のライト点灯処理と同様の処理を実行する処理である。すなわち、ライト点灯処理Q6により、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。このライト点灯コマンドは、センタ装置4から停止物体をカバーしている、言い換えると、停止物体を撮影している監視カメラ2に対して送信される。なお、ライト制御部41によって実行される処理については、後述する。
【0048】
ライト危険点灯コマンドに対応するライト危険点灯処理Q7は、センタ装置4からのコマンドがスポットライト24に危険点灯を指示するコマンドである場合に実行され、スポットライト24を点滅、回転または回動させる処理である。このライト危険点灯コマンドは、センタ装置4から停止物体を撮影している監視カメラ2以外の監視カメラ2に送信される。特に、ライト危険点灯コマンドは、停止物体を撮影している監視カメラ2の1つ前の監視カメラ2からトンネルの入り口の監視カメラ2に対して送信される。これにより、停止物体等の危険があることを後続の車両のドライバに対して認識させることができる。ライト危険点灯処理Q7により、スポットライト24を点滅、回転または回動させるための危険点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。
【0049】
このライト危険点灯処理Q7が、停止物体を検出した監視カメラ2のスポットライト24と異なる処理、例えば、スポットライト24を点滅、回転または回動させるためのライト危険点灯信号を出力するライト危険点灯処理部を構成する。なお、スポットライト24を回転及び回動させる際の回転データ及び回動データは、メモリ37に格納させている。また、ライト制御部41によって実行される処理については、後述する。
【0050】
なお、センタ装置4からのコマンドには、全ての監視カメラ2に対するグローバルコマンドと、特定の監視カメラ2に対するコマンドの2種類がある。
以上のように、追加監視部35は、基本監視部34の処理結果に基づいて、実行可能であると共に、センタ装置4からのコマンドに応じて実行可能に構成されている。
【0051】
判定部36は、基本監視部34及び追加監視部35からの検出結果あるいは判定結果に基づいて、ルールベースの判定処理を行うと共に、必要な追加監視部35に含まれる複数の処理部の中から実行すべき処理部を、そのルールに従って選択して実行させる処理を行う。さらに判定部36は、センタ装置4からのコマンドの内容に応じて、追加監視部35の中の複数の追加処理部の中から、実行すべき処理部を選択して実行させる処理を行う。
【0052】
具体的には、基本監視部34により異常が検出された場合、判定部36は、後述するような、追加解析処理、異常対応処理の実施指示処理、通報処理、及び画像送信処理を実行する。さらに、判定部36は、センタ装置4からコマンドを受信すると、コマンドの内容を解析し、そのコマンドに対応する処理を、追加監視部35内の対応する追加処理部を実行する。
【0053】
また、判定部36の処理内容は、ルールベースで定められるので、判定部36は、ルールによる判定のための基準データ及び判断ルールを含む。その基準データと判断ルールは、判定部36のプログラム中に記述されてもよいし、メモリ37内に記憶されていてもよい。基準データ及び判断ルールを変更することによって、判定部36が実行を指示する、基本監視部34及び追加監視部35内の処理内容を変更することができる。さらに、判定部36は、メモリ37に格納されたログデータを用いて、判定を行うことも可能である。判定部36の異常処理とコマンド処理の詳細については、後述する。
【0054】
メモリ37は、上述したログデータを記憶する記憶部である。メモリ37に格納されるログデータの構造については後述する。
【0055】
画像供給部38は、2つの撮像部31により撮像して得られた画像データの少なくとも一方の撮像部からの、最新の複数フレームの画像データを格納可能なRAM38aを有している。画像供給部38のRAM38aに格納された1以上の画像データは、判定部36により読み出し可能である。後述するように、RAM38aに格納された1以上の画像データは、センタ装置4からのコマンドに応じて、あるいは判定部36からの指示に応じて、センタ装置4へ送信される。
【0056】
通信制御部39は、デイジーチェーン接続された通信ケーブル3を介して、センタ装置4及び他の監視カメラ2との通信を行うための制御部である。特に、通信制御部39は、センタ装置4からのコマンドを受信するコマンド受信部を構成する。なお、本実施の形態では、センタ装置4からの画像データの送信コマンドを受信すると、通信制御部39が画像供給部38から画像データを読み出して、センタ装置4へ送信しているが、判定部36がコマンドを解釈して、RAM38aから画像データを読み出して、センタ装置4へ送信するようにしてもよい。
【0057】
2つの通信I/F40は、通信制御部39とコネクタ13との間のインターフェースである。
【0058】
ライト制御部41は、上述した追加処理部Q1またはライト点灯処理Q6によるライト点灯信号が供給された場合、静止画データに基づいて、事故などにより停止した車両、道路上の落下物などの停止物体の位置を取得する。ライト制御部41は、この停止物体の位置情報に基づき、停止物体に光を照射するための、スポットライト24の角度を算出する。ライト制御部41は、算出された角度情報に基づき、モータ26a及び27aを制御し、スポットライト24を点灯する。これにより、停止物体にスポットライト24の光を照射することができる。
【0059】
また、ライト制御部41は、上述したライト危険点灯処理Q7による危険点灯信号が供給された場合、スポットライト24を点滅、回転または回動させる制御を行う。ここでは、スポットライト24を回転させる制御について説明する。ライト制御部41は、スポットライト24を回転させるための危険点灯信号が供給された場合、スポットライト24を回転させるための回転データをメモリ37から読み出す。ライト制御部41は、読み出した回転データに基づき、モータ26a及び27aを制御し、スポットライト24を点灯する。具体的には、ライト制御部41は、回転データに基づき、スポットライト24が重力方向に対して所定の角度を有するようにモータ27aを駆動した後、モータ27aの駆動を停止する。そして、ライト制御部41は、モータ26aの回転が継続するように、モータ26aを駆動することで、スポットライト24を重力方向の軸に対して回転させる。
【0060】
(監視カメラにおける基本監視処理)
次に、基本監視処理について説明する。
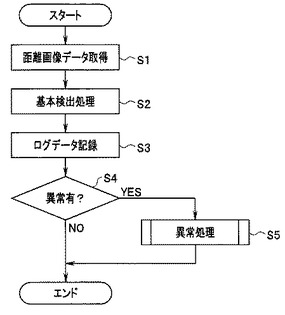
図7は、基本監視処理の流れの例を示すフローチャートである。本実施の形態では、上述したように、基本監視部34の処理は、CPUによって実行されるプログラムの一部の機能として実行される。
【0061】
立体計測部33から距離画像データが取得される(S1)。距離画像データに基づいて、基本監視部34における、停止物体の検出処理部P1と、物体の軌跡の検出処理部P2とが、基本監視処理として実行される(S2)。
【0062】
停止物体の検出処理部P1は、背景以外の物体の認識を行い、フレーム間での物体の位置に変化があるか否かに基づいて、停止物体の検出を行う。立体形状の大きさが所定の大きさ以上の物体が、停止物体の検出対象として選択される。距離画像データに基づいて停止物体の検出を行っているので、物体の体積が検出でき、検出すべき停止物体を精度良く認識し、検出することができる。
【0063】
物体の軌跡の検出処理部P2は、認識された物体の軌跡を、フレーム間の物体の位置情報から検出し、その軌跡が所定の軌跡に合致するかしないかを検出あるいは判定する。
【0064】
この軌跡の検出も、距離画像データに基づいて行っているので、物体の軌跡を精度良く検出して判定することができる。
次に、ログデータ記録処理が実行される(S3)。この処理は、上述した計測及び記録処理部P3により実行される。
【0065】
そして、判定部36は、上記の停止物体の検出処理部P1と物体の軌跡の検出処理部P2のいずれかで、異常が検出されたか否かを判定し(S4)、異常が無ければ(S4:NO)、処理は終了し、異常が有れば(S4:YES)、異常処理を実行する(S5)。
なお、図7の処理は、監視カメラ2が動作中は、常に繰り返し実行されている。
【0066】
(監視カメラにおけるコマンド処理)
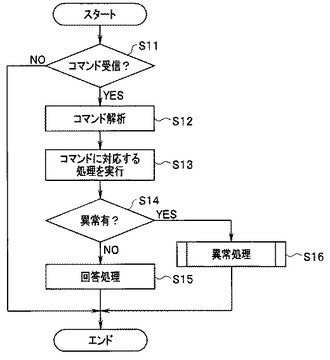
次に、コマンド処理について説明する。図8は、コマンド処理の流れの例を示すフローチャートである。
監視カメラ2は、センタ装置4からのコマンドを受信したか否かを判定する(S11)。コマンドは、通信制御部39を介して、判定部36により受信される。コマンドを受信しないときは(S11:NO)、処理は、終了し、コマンドを受信したときは(S11:YES)、受信したコマンドを解析する、すなわちコマンドの内容を判定する(S12)。
【0067】
判定部36は、コマンドに対応する処理部を、追加監視部35の中から選択して、その処理を実行する(S13)。例えば、コマンドがログデータの送信要求コマンドであれば、判定部36は、追加監視部35の中からそのコマンドに対応する処理部Q3を選択して、メモリ37から指定されたログデータを読み出して、センタ装置4へ送信する。コマンドが、人の検出処理を行う人検出コマンドであれば、追加監視部35の中からそのコマンドに対応する処理部Q4を選択して、画像データから人を検出する処理が実行される。
【0068】
コマンドに対応する処理の結果、何らかの異常が検出されたか否かが判定され(S14)、人が検出された等の異常が無ければ(S14:NO)、異常が無かった旨の情報を送信したり、要求された情報を送信する、等の、センタ装置4への回答処理を実行して(S16)、処理は終了し、異常が有れば(S14:YES)、異常処理を実行する(S16)。
【0069】
(監視カメラにおける異常処理)
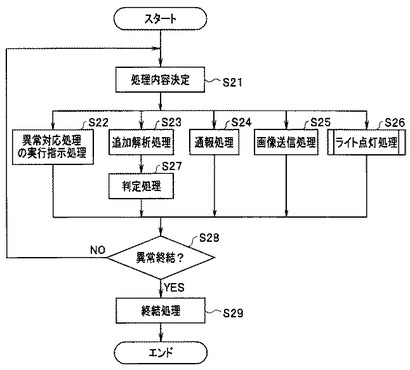
次に、異常処理について説明する。図9は、図7及び図8における異常処理の流れの例を示すフローチャートである。
基本監視処理あるいは追加監視処理において検出された異常の内容に応じて実行すべき処理の内容が、ルールベースで予め設定されている。判定部36は、その予め決められたルールベースの内容に従って、図9に示す処理を実行する。
判定部36は、異常が検出されると、ルールベースを参照して、処理内容を決定する(S21)。
【0070】
そして、判定部36は、その決定された処理内容に従って、異常対応処理の実施指示処理(S22)、追加解析処理(S23)、通報処理(S24)、画像送信処理(S25)及びライト点灯処理(S26)を実行する。これらの5つの処理は、互いに並列に実行され、それぞれ処理内容決定処理(S21)で決定された内容を実行する。処理の内容がルールベースで予め設定されているので、異常の内容によっては、処理内容決定処理(S21)において、5つの処理全てを実行しないように、決定される場合もある。
【0071】
異常対応処理の実施指示処理(S22)は、センタ装置4を介さずに、監視カメラ2から他の設備、例えばトンネル内に設置された放送設備、トンネルの出入り口に設置された情報表示パネル、に直接、動作する指示を与える処理である。他の設備が、通信ケーブル3で形成されるイーサネット(登録商標)の通信上に接続されている場合に、監視カメラ2は、他の設備と通信をすることができる。
【0072】
例えば、通信ケーブル3と同じイーサネット(登録商標)に接続されている通信可能な設備として、放送設備と情報表示パネルがあれば、異常対応処理の実施指示処理(S22)は、その放送設備等の制御装置に対する所定の音声出力の指示コマンドの送信、等の処理である。
【0073】
図1において、設備の制御装置43が、イーサネット(登録商標)に接続されていて、監視カメラ2からのコマンドを受信可能となっている。この場合、ある監視カメラ2(k)が、異常対応処理の実施指示処理(S22)に従って、その制御装置43へ所定のコマンドを送信すると、その設備は、そのコマンドに指定された動作を実行する。よって、監視カメラ2から直接設備に対して、所望の動作指示をすることができるので、異常時の対応を迅速に行うことができる。
【0074】
また、異常対応処理の実施指示処理(S22)は、他の監視カメラ2へのコマンド送信も含まれる。例えば、避走車両の検出がされた場合に、その車両の進行方向にある他の監視カメラ2(隣の監視カメラあるいは、数台先の監視カメラ)へ、避走車両の速度と軌跡データをセンタ装置4へ送信させるような処理を実行させるコマンドを、送信する。これにより、センタ装置4は、検出された避走車両の走行状態を、迅速に監視することができる。
【0075】
以上のように、異常対応処理の実施指示処理(S22)は、基本監視部の処理結果が所定の異常が有りの判定である場合、発生した所定の異常の種類に応じて、所定の設備の所定の動作の指示あるいは他の監視カメラ2に所定の処理の実行を指示するコマンドを、所定の設備あるいは他の監視カメラ2に送信する実行コマンド送信処理部を構成する。
【0076】
追加解析処理(S23)は、上述した追加監視部35内の追加処理部の処理である。よって、異常の内容に応じた追加解析を行うことができる。
また、通報処理(S24)は、検出された異常の内容に応じた所定のデータ、メッセージ等の所定の情報を、センタ装置4へ送信する処理である。例えば、判定部36が、異常の内容から危険度レベルを判定する処理を実行した場合は、その危険度レベルの情報も、センタ装置4へ送信される。
【0077】
画像送信処理(S25)は、異常を検出した監視カメラ2が、所定の画像データを、画像供給部38から読み出して、センタ装置4へ送信する処理である。
ライト点灯処理(S26)は、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号をライト制御部41に出力する処理である。なお、ライト制御部41での処理については、後述する。
【0078】
追加解析処理(S23)の実行後、所定の判定処理が実行される(S27)。
【0079】
上述したように、S22からS27の処理の内容は、ルールベースで定められたものであり、異常の内容に応じて異なっている。これらの処理が実行されると、検出された異常が終結したか否かが判定される(S28)。
【0080】
異常が終結していない場合は(S28:NO)、処理は、S21に戻り、異常が終結した場合は(S28:YES)、終結処理が実行されて(S29)、処理は、終了する。
【0081】
例えば、基本監視部34の停止物体の検出処理部P1により停止物体の有りの異常が検出された場合、判定部36は、その停止物体の検出に対応する予め決められた追加処理部Q1を、追加解析処理(S23)として実行する。同時に、判定部36は、異常対応処理の実行指示処理(S22)において、情報表示パネルの制御装置に対して、「トンネル中、停止車両有り」等のメッセージを表示するように、コマンドを送信する。さらに、判定部36は、通報処理(S24)において、センタ装置4へ停止車両の検出がされたことのメッセージを送信する。さらに、判定部36は、画像送信処理(S25)において、その停止物体の画像データをセンタ装置4へ送信する。
【0082】
判定処理(S27)は、追加解析処理(S23)の処理結果に基づく処理であり、追加処理部Q1の処理結果に応じた処理を実行する。よって、例えば、追加処理部Q1により、人が検出された場合には、判定部36は、人が検出されたことの異常を検出する。
【0083】
異常が終結していない場合には、処理は、処理内容決定処理(S21)に戻る。そして、判定部36は、再度、追加解析処理により検出された異常も加えて、処理内容を決定し、S22からS25の処理を実行する。
【0084】
例えば、追加処理部Q1において、人が検出されたときには、異常対応処理の実行指示処理(S22)において、放送設備の制御装置に対して、「他の車両に注意して下さい。」等の音声メッセージをトンネル内に放送するように、コマンドを送信する。
【0085】
別の例として、基本監視部34の物体の軌跡の検出処理部P2により物体の軌跡が所定の軌跡ではないと判定された場合、判定部36は、物体の軌跡が所定の軌跡に合致しない場合に対応する追加処理部Q2を、追加解析処理として実行し、その追加処理部Q2の結果に基づく判定処理(S27)を実行する。
【0086】
終結処理(S29)は、異常状態が検出されなくなったので、センタ装置4への異常状態の終了したことのメッセージ等の送信処理、他の設備へ送信したコマンドに基づく動作の終了指示のコマンドの送信処理、等が実行される。
【0087】
以上のように、監視カメラ2は、基本監視部34と追加監視部35を有して、通常は、基本監視部34の処理を実行し、基本監視部34において異常が検出された場合、あるいはセンタ装置4からコマンドを受信した場合は、予めルールベースで設定された処理部を実行する。
【0088】
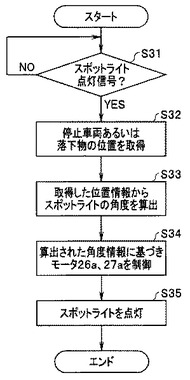
図10は、図9におけるライト点灯処理の流れの例を示すフローチャートである。この図10の処理は、ライト制御部41によって実行される。
【0089】
まず、スポットライト点灯信号が供給された否かが判定される(S31)。スポットライト点灯信号が供給されていない場合は(S31:NO)、処理は、S31に戻り、スポットライト点灯信号が供給された場合は(S31:YES)、停止車両あるいは落下物の位置が取得され(S32)、取得された位置情報からスポットライト24の角度が算出される(S33)。そして、算出された角度情報に基づき、モータ26a及び27aが制御される(S34)。最後に、スポットライト24の点灯が実行され(S35)、処理を終了する。
【0090】
以上のように、監視カメラ2は、スポットライト24を備え、トンネル内に停止物体が存在した場合、ライト点灯処理を実行することにより、停止物体に対してスポットライト24からの光を照射する。この結果、監視カメラ2は、トンネル内を走行中のドライバに、事故原因となる停止物体を容易に認識させることができる。
【0091】
(センタ装置における異常処理)
監視室の監視員は、モニタ6に表示される情報、画像などを見ながら、トンネル内の交通状況を監視する。監視員は、上述したように特定の監視カメラ2を指定して所望の処理を実行させて、その監視カメラ2を制御することができる。そして、センタ装置4は、複数の監視カメラ2からの各種情報を受信して、異常が検出された場合には、所定の処理を実行する。
【0092】
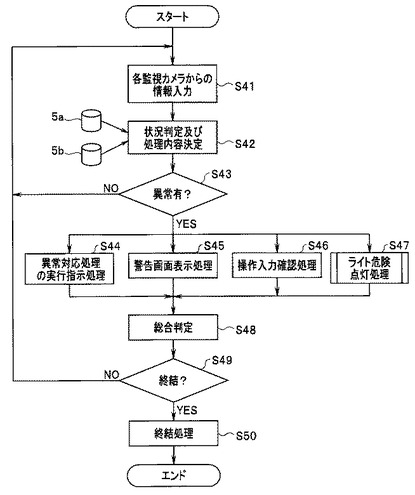
図11は、センタ装置4における異常処理の流れの例を示すフローチャートである。図11の処理は、センタ装置4のCPUによって実行される。
センタ装置4は、個別カメラからの情報を入手し(S41)、所定の基準に基づいて、状況を判定し、その判定結果に応じた処理内容を決定する(S42)。
【0093】
その状況を判定するために所定の基準データは、記憶装置5の基準データ記憶部5aに記憶されている。また、判定された状況に応じて実行すべき処理内容のデータも、記憶装置5内の処理内容データ記憶部5bに記憶されている。
【0094】
センタ装置4のCPUは、S42における状況判定の結果、異常ありと判定されたか否かを判定し(S43)、異常がなければ(S43:NO)、処理は、S41に戻る。異常があれば(S43:YES)、センタ装置4は、異常対応処理の実行指示処理(S44)、警告画面表示処理(S45)、操作入力確認処理(S46)及びライト危険点灯処理(S47)を実行する。これらの4つの処理は、互いに並列に実行され、それぞれS42において決定された内容を実行する。
【0095】
異常対応処理の実行指示処理(S44)は、例えば、センタ装置4に接続された設備、例えばトンネルの出入り口に設置された情報表示パネル、に対する指示を与える処理、特定の監視カメラ2へのコマンド指示送信処理、等である。
【0096】
例えば、基本監視部34の物体の軌跡の検出処理部P2により物体の軌跡が所定の軌跡ではないと判定された場合にその情報を入手すると、情報表示パネルに「走行注意」等の所定のメッセージを表示させるためのコマンドが、情報表示パネルに送信される。その結果、他の車両のドライバは、より注意した運転を心掛けることができる。そのようなコマンドの送信は、予め自動的に行われる設定になっている場合には、監視員は、特に、情報表示パネルへの指示操作をしなくてよい。その設定内容は、処理内容データ記憶部5bに記憶される。
【0097】
異常対応処理の実行指示処理(S44)により、センタ装置4は、例えば、他の特定の監視カメラ2に対して、画像データを送信させるためのコマンドを送信するようにすることもできる。その結果、所定の軌跡に合致しない走行をしている車両がその後通過すると想定される場所の画像がモニタ6に表示されるので、監視員は、その車両がその監視カメラ2の前を通過するのを待ち伏せして、通過したときの走行状況を見て確認することができる。
以上のようにして、異常対応処理の実行指示処理(S44)の処理によって、異常時における所定の処理の自動化を実現することができる。
【0098】
警告画面表示処理(S45)は、図13に示すようなモニタ6の画面上に、所定のメッセージを表示する処理である。この警告画面表示処理(S45)によって、例えば、ある異常が発生したときは、「・・を操作して下さい。」等の対応操作方法を示すすなわちアドバイスするメッセージが表示される。そのメッセージ表示を見て、監視員に所定の操作をさせることができる。発生した異常に応じて、どのようなメッセージを、どのような順番で表示するかは、処理内容データ記憶部5bに予め記憶されている。
【0099】
また、操作入力確認処理(S46)は、警告画面表示処理(S45)によって指示された操作が、適切に行われたか否かを確認する処理である。例えば、所定の順番で操作させるべき操作が、所定の順番で正しく行われているか否かが判定され、操作内容及び順番が適切でないときには、操作入力確認処理(S46)は、操作すべき内容をモニタ6上に表示する。
【0100】
すなわち、センタ装置4は、いずれかの監視カメラ2の判定部36から所定の異常の通知を受けると、所定の操作内容を示すメッセージを表示装置に表示する表示処理と、所定の操作内容の操作入力を監視して所定の操作内容が入力されているかを確認する操作入力確認処理を実行する。
【0101】
ライト危険点灯処理(S47)は、スポットライト24を点滅、回転または回動させるための危険点灯信号をライト制御部41に出力する処理である。なお、ライト制御部41での処理については、後述する。また、センタ装置4における異常処理としては、ライト危険点灯処理(S47)に代わりライト点灯処理が実行されることもあるが、このライト点灯処理の処理内容は、上述した図10と同様の処理のため、説明を省略する。
【0102】
S44〜S47の処理の結果、総合判定が行われる(S48)。異常発生後のデータすなわち経緯データは、記憶装置5に記録される。総合判定の基準も、記憶装置5の基準データ記憶部5aに記憶されている。総合判定処理(S48)は、異常が発生してからの経緯に基づいて、所定の処理が実行されて、異常の発生もなくなり、異常が終結したか否かが判定される。
【0103】
総合判定処理(S48)の後、異常が終結したか否かが判定され、異常が終結していなければ(S49:NO)、処理は、S41に戻り、異常が終結していれば(S49:YES)、終結処理を実行して(S50)、処理は終了する。
【0104】
よって、センタ装置4は、各監視カメラ2からの情報に基づいて、異常の判定を行い、その異常に応じた処理を実行すると共に、所定のメッセージ等をモニタ6の画面上に表示し、かつ異常に対応する所定の操作が正しく行われたか否かの確認を行う。よって、異常発生時に、監視員がその異常の内容を確認して、必要な設備に対する処理の全てを行う必要もなく、かつ操作内容がガイダンスとして表示されるので、迅速な対応も可能となり、さらに操作ミスも防止することができる。
【0105】
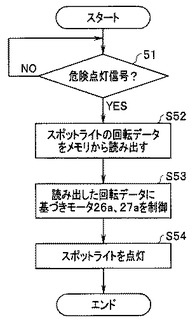
図12は、図11におけるライト処理の流れの例を示すフローチャートである。この図12の処理は、ライト制御部41によって実行される。
【0106】
まず、危険点灯信号が供給された否かが判定される(S51)。危険点灯信号が供給されていない場合は(S51:NO)、処理は、S51に戻り、危険点灯信号が供給された場合は(S51:YES)、メモリ37からスポットライト24の回転データが読み出される(S52)。そして、読み出されたスポットライト24の回転データに基づき、モータ26a及び27aが制御される(S53)。最後に、スポットライト24の点灯が実行され(S54)、処理を終了する。
【0107】
以上のように、センタ装置4は、トンネル内に停止物体が存在した場合、停止物体に光を照射している監視カメラ2以外の監視カメラ2に対し、ライト危険点灯処理を実行させる。停止物体に光を照射していない各監視カメラ2は、ライト危険点灯処理により、例えば、各監視カメラ2が備えるスポットライト24を回転させる。このように、センタ装置4は、停止物体に光を照射していない各監視カメラ2に対し、停止物体に光を照射している監視カメラ2とは異なる動作を実行させる。この結果、監視カメラ2及びセンタ装置4は、トンネル内を走行中のドライバに、トンネル内に事故原因となる停止物体が存在することを容易に認識させることができる。
【0108】
(監視画面)
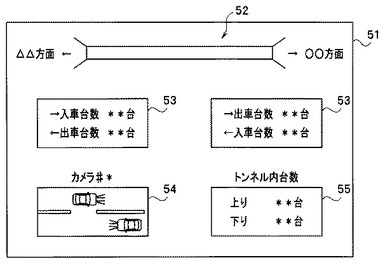
図13は、モニタ6上に表示される監視画面の例を示す図である。モニタ6の画面51内には、監視対象トンネルの模式図を表示する表示部52と、トンネルの各出入り口の入車台数と出車台数の表示部53と、監視画像の表示部54と、トンネル内に存在する車両の台数を表示する表示部55とを含む。
【0109】
表示部52は、トンネルの模式図の各出入り口の近傍には、行き先を示す、「・・方面」という文字が併せて表示されている。
表示部53は、トンネルの模式図の各出入り口の近傍に配置され、入車台数と出車台数をリアルタイムで表示する。台数は、例えば、日付の始まる午前零時からの累積台数などである。
【0110】
表示部54は、複数の監視カメラ2の中から選択された特定の監視カメラ2から撮影画像を取得して、表示している。上述したように、監視員がセンタ装置4を操作して、監視したい場所の監視カメラ2を選択して、その監視カメラ2に画像送信コマンドを送信することによって、表示部54にその監視カメラ2の画像を表示させることもできる。
【0111】
表示部55は、そのときにトンネル内に存在する車両の数を、リアルタイムで表示する。例えば、監視カメラ2(1)と2(n)から、上りと下りの各車線のそれぞれについて、認識した車両であってトンネルに入った車両と出た車両の数の情報を常に送信させ、上りと下りのそれぞれについて入った車両から出た車両の差分を計算することによって、センタ装置4は、トンネル内に存在する車両の数を、表示することができる。
【0112】
図13の画面は、常にモニタ6に表示され、上述したアドバイスメッセージ等の表示は、図13の画面上に例えば、ポップアップウインドウにより行われる。
【0113】
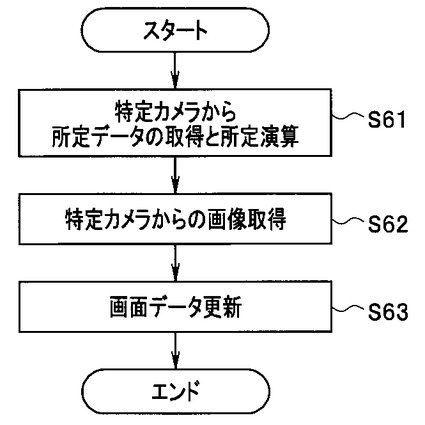
図14は、図13の画面の表示処理の流れの例を示すフローチャートである。センタ装置4は、特定の監視カメラ2、例えば監視カメラ2(1)と2(n)、から、入った車両と出た車両の数の情報を取得し、所定演算を実行する(S61)。所定演算とは、上述した表示部53と55の台数を表示するための演算である。
【0114】
そして、センタ装置4は、特定の監視カメラ2からの画像データを取得し(S62)、S61とS62で得た情報に基づき、図13の画面データを更新する(S63)。その結果、モニタ6に表示される画面51の内容は、リアルタイムの表示となる。
【0115】
(ログデータ)
各監視カメラ2のメモリ37には、上述したようにログデータが格納される。計測及び記録処理部P3は、立体計測部33において得られた距離画像に基づいて、認識して得られた各物体について、識別子を付与し、その物体について、図15に示す各データを取得或いは計算して得て、メモリ37に記憶する。
メモリ37の容量は、制限があるので、新しいデータが記録されるときは、最も古いデータが消去される。メモリ37には、例えば、過去、数十時間のデータが記憶される。
【0116】
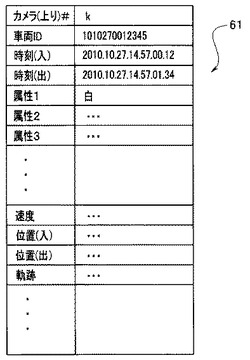
図15は、ログデータのデータ構造を示す図である。図15のログデータは、監視カメラ2の上りと下り毎に生成されて記憶されるデータである。
図15は、監視カメラ2の識別番号(図15では、監視カメラ2(k)として示されている)の上りの車線のログデータを示す。ログデータ61は、上りと下り別に、カメラ識別番号(カメラ#(上り))、車両ID、時刻(入)、時刻(出)、物体の複数の属性、速度、監視領域内に入ったときの位置(入)、監視領域内から出たときの位置(出)、監視領域内の軌跡、等のデータを含む。
【0117】
車両IDは、監視カメラ2毎に付与されるので、所謂ローカルIDである。時刻(入)と時刻(出)は、それぞれ、認識された物体が監視領域内に入った及び出た時刻であり、ミリ秒単位の時刻データである。属性は、例えば、認識された物体の色、体積、高さ、形状などのデータである。体積、高さ、形状などは、距離画像データに基づいて算出される。速度は、監視領域内を走行する物体の位置の変化から演算により算出されるデータである。
【0118】
位置(入)と位置(出)は、それぞれ、監視領域内の位置であり、例えば、監視領域のXY平面上において、物体が監視領域に入ったときの位置と監視領域から出て行ったときの位置のデータである。軌跡は、監視領域のXY平面上における、認識された物体の位置、例えば先頭位置、重心位置等、の変化を示す軌跡データである。
図15に示すデータ以外のデータもログデータとしてメモリ37に記憶してもよい。
【0119】
上述したように、メモリ37のログデータ61は、車両毎に生成されるが、ローカルIDのデータである。センタ装置4は、全てのあるいは一部の監視カメラ2からログデータを収集することができる。
【0120】
センタ装置4は、各監視カメラ2から収集したログデータ中の時刻(入)、時刻(出)、位置(入)及び位置(出)のデータを用いて、各監視カメラ2からの複数の車両IDを、互いに関連付ける処理を行うことができる。
【0121】
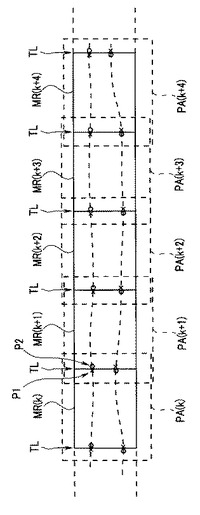
図16は、センタ装置4における車両IDの関連付けを説明するための図である。図16では、連続する監視カメラ2(k)から2(k+4)のそれぞれの撮影範囲が、PA(k)〜PA(k+4)として示されている。上述したように、隣り合う監視カメラ2の撮影範囲PA(点線で示す)は、重なっている。
【0122】
撮影範囲PA内には、ログデータ中、時刻(入)、時刻(出)、位置(入)及び位置(出)のデータを取得するための監視領域MRが設定されている。図16では、撮影範囲PA(k)〜PA(k+4)中に、それぞれ、監視領域MR(k)〜MR(k+4)が設定されている。隣り合う監視カメラ2の監視領域MRは、接するように設定される。この設定は、例えば、トンネル101内に監視カメラ2を設置した後に、各監視カメラ2からの撮影画像に基づいて、行われる。よって、隣り合う監視カメラ2の2つの監視領域MRが接して線(以下、境界線という)TL上の位置は、2つの監視領域MR間で関連付けることができる。
【0123】
そして、センタ装置4は、隣り合う監視カメラ2同士の境界線TL上の位置の関連情報を、記憶装置5に予め記憶しておく。その位置の関連情報は、記憶装置5の関連情報記憶部5cに記憶される。関連情報は、例えば、境界線TL上における、2つの監視領域MRの位置の変換式であり、全ての境界線TLについて生成されて、関連情報記憶部5cに記憶される。センタ装置4は、位置の関連情報に基づいて、隣り合う2つの監視領域MRの一方から見た境界線TL上の位置と、他方から見た同じ境界線TL上の位置が同じ位置であるかを判定することができる。
【0124】
図16には、上りと下りのそれぞれにおけるある車両の軌跡が、点線で示されている。上りにおける監視領域MR(k)から出た車両の位置P1と、その隣の監視領域MR(k)から出た車両の位置P2は、それぞれの監視カメラ2(k)と2(k+1)から得られるので、監視カメラ2(k)の記録した時刻(出)と監視カメラ2(k+1)の記録した時刻(入)が一致し、かつ監視カメラ2(k)の記録した位置(出)と監視カメラ2(k+1)の記録した位置(入)が一致した場合は、2つの監視カメラ2で別個に生成されたログデータは、同じ車両についてのログデータと決定される。
【0125】
そのために、センタ装置4は、複数の監視カメラ2の監視する領域における、監視カメラ同士の位置を関連付ける関連情報を有し、その関連情報に基づいて、複数の監視カメラが生成した車両の識別情報を関連付ける処理を行う関連付け処理部を有する。
【0126】
その結果、各監視カメラ2において別個に生成されたローカルIDの車両IDを有する2つのログデータは、同じ車両のものであると判定できるので、一つの車両IDのログデータとして纏めることができる。言い換えると、車両IDをグローバルIDに変換することができる。
【0127】
なお、ログデータには、各種属性データが含まれるので、複数のログデータを、同じ車両についてのログデータと決定するときに、属性データを確認用データとして用いるようにしてもよい。
【0128】
センタ装置4は、全ての監視カメラ2のログデータを収集してこのような処理を行うことによって、全ての車両についての、トンネルの入口から出口までの道路上の走行状態のデータを生成して得ることができる。そのデータは、各車両のトンネル内の走行履歴データである。
【0129】
よって、事故等の何らかのイベントが発生した直後に、センタ装置4が全ての監視カメラ2に対してログデータを送信するログデータ送信コマンドを送信して、全ての監視カメラ2のログデータを収集して、上記のような各車両の走行履歴データを生成する。生成された各車両の走行履歴データは、事故直後の事故に関わる車両の走行状態を示すので、事故の原因を調査する者にとっては、有効な情報となる。
【0130】
なお、図16では、隣り合う監視カメラ2の監視領域MRは、接するように設定されているが、重なって、あるいは完全に接していなくてもよい。重なっている場合は、重なっている領域の位置情報の関連付けを行うことによって、2つのログデータの関連付けを行うことができる。また、隣り合う監視カメラ2の監視領域MRが接していない場合は、その間の距離に応じた時間と位置の推定処理を行うことによって、2つのログデータの関連付けを行うことができる。
【0131】
以上のように、上述した本実施の形態による通行車両監視システムによれば、道路上の車両等を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することができる。
【0132】
なお、上述した実施の形態は、通行車両監視システム及び車両用監視カメラをトンネルの車両を監視する例であるが、上述した通行車両監視システム及び車両用監視カメラは、トンネル内の車両の監視だけでなく、通常の道路、高速道路等の車両の監視にも適用できるものである。
【0133】
本発明は、上述した実施の形態に限定されるものではなく、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。
【符号の説明】
【0134】
1 通行車両監視システム、2 監視カメラ、3 通信ケーブル、4 センタ装置、5 記憶装置、5a 基準データ記憶部、5b 処理内容データ記憶部、11 ケーシング、12 対物光学系、13 コネクタ、21 スポットライトユニット、22 カバー、23 球体部材、24 スポットライト、25 支持ローラ、26,27 駆動部、26a,27a モータ、26b,27b ローラ、31 撮像部、32 撮像I/F、33 立体計測部、34 基本監視部、35 追加監視部、36 判定部、37メモリ、38 画像供給部、39 通信制御部、40 通信I/F、41 ライト制御部、42 撮像素子、43 設備の制御装置、101 トンネル、102 天井部分、103 道路面
【技術分野】
【0001】
本発明は、通行車両監視システム及び車両用監視カメラに関する。
【背景技術】
【0002】
従来より、道路上を通行する車両の事故防止等のために車両監視システムが広く実用化されている。車両監視システムには、車両を撮影した画像の車両のナンバープレートから車両番号を認識するもの、運転席画像を記録するもの、等がある。
【0003】
また、特にトンネル内で発生する所定の事象を監視し、事故の発生を未然に防止するために情報掲示板にメッセージを表示し、さらに毒物を運搬する車両を検出するトンネル内監視システムも提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−272086号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のいずれの監視装置あるいは監視システムも、撮影画像から対象物の立体的な大きさは認識することができない。
例えばトンネル内で道路上の落下物が新聞紙のような薄い物であれば、事故の発生する危険度は高くないが、落下物が段ボール箱のような立体的な物であれば、事故の発生する危険度は高い。また、撮影された対象物の実際の大きさ及びその立体形状が不明なため、物の認識、例えば人の認識、の精度も低い。
【0006】
また、例えばトンネルの場合、法令等により所定の長さ以上のトンネルにのみ監視カメラの設置義務がなく、かつ監視カメラの設置コストが高いため、監視カメラの設置がされていないトンネルが多く、さらに監視カメラが設置されているトンネルでも、カメラの設置台数も少ない、という問題がある。
さらに、複数の監視カメラからの画像情報は、監視室の装置に集中的に集められて画像処理が行われるため、車両毎の状況、例えば各車両の走行状況、を分析するには、その画像処理を行う装置の負荷が大きくなってしまうという問題もある。
【0007】
さらにまた、例えばトンネル内において、事故または故障により車両が停止する、あるいは、落下物が存在する場合、トンネル内は薄暗いため、後続の車両のドライバは、停止した車両あるいは落下物等の停止物体の認識が遅れることがある。そのため、後続の車両が停止物体に衝突する、あるいは、停止物体を急に避けることで事故に繋がるという問題もある。
【0008】
そこで、本発明は、道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一態様によれば、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラと、その複数の監視カメラに接続されたセンタ装置とからなる通行車両監視システムであって、各監視カメラは、複数の撮像部と、少なくとも1つのスポットライトと、前記スポットライトの照射位置を変更させる照射位置変更部と、前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、を有することを特徴とする通行車両監視システムを提供することができる。
【発明の効果】
【0010】
本発明によれば、道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態に係わる通行車両監視システムの構成を説明するための図である。
【図2】本発明の実施の形態に係わる、トンネル内における監視カメラの設置状況を示す図である。
【図3】本発明の実施の形態に係わる監視カメラの外観斜視図である。
【図4】本発明の実施の形態に係わる監視カメラの平面図である。
【図5】本発明の実施の形態に係わるスポットライトユニットの構成を説明するための図である。
【図6】本発明の実施の形態に係わる監視カメラ2の内部構成を示すブロック図である。
【図7】本発明の実施の形態に係わる基本監視処理の流れの例を示すフローチャートである。
【図8】本発明の実施の形態に係わるコマンド処理の流れの例を示すフローチャートである。
【図9】図7及び図8における異常処理の流れの例を示すフローチャートである。
【図10】図9におけるライト処理の流れの例を示すフローチャートである。
【図11】本発明の実施の形態に係わる、センタ装置4における異常処理の流れの例を示すフローチャートである。
【図12】図11におけるライト処理の流れの例を示すフローチャートである。
【図13】本発明の実施の形態に係わる、モニタ6上に表示される監視画面の例を示す図である。
【図14】図13の画面の表示処理の流れの例を示すフローチャートである。
【図15】本発明の実施の形態に係わるログデータのデータ構造を示す図である。
【図16】本発明の実施の形態に係わる、センタ装置4における車両IDの関連付けを説明するための図である。
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。
(システム構成)
まず図1に基づき、本実施の形態に係わるシステムの構成を説明する。図1は、本実施の形態に係わる通行車両監視システムの構成を説明するための図である。図2は、トンネル内における監視カメラの設置状況を示す図である。図3は、監視カメラの外観斜視図である。図4は、監視カメラの平面図である。図5は、スポットライトユニットの構成を説明するための図である。
【0013】
図1に示すように、トンネル内を監視する交通監視システム1は、それぞれがステレオカメラである複数の監視カメラ2と、隣り合う2台の監視カメラ2を接続する通信ケーブル3と、複数の監視カメラ2の中の1台と通信ケーブル3により接続されたセンタ装置4と、センタ装置4に接続された記憶装置5と、センタ装置4に接続された画像表示装置であるモニタ6とを含んで構成されている。
【0014】
図1に示すように、トンネル101の一端TAに設置される監視カメラ2(1)から他端TBまでの監視カメラ2(n)のn台(nは整数)の監視カメラ2が、トンネル内の天井側に、略等間隔に配置されている。図1では、各監視カメラ2には、識別番号が付されて示されている。1番目の監視カメラ2(1)からn番目の監視カメラ2(n)までが、通信ケーブル3で数珠繋ぎに接続され、監視カメラ2(1)がセンタ装置4に接続されている。なお、以下の説明で、特定の監視カメラを指さない場合は、監視カメラ2と表記する。
【0015】
通信ケーブル3は、電源供給可能な信号線であり、例えば、電源供給も可能なパワー・オーバ・イーサネット(登録商標)(PoE)対応のケーブルである。センタ装置4は、電源回路を含み、電源回路の電源は、通信ケーブル3を介して各監視カメラ2に供給される。
【0016】
センタ装置4、記憶装置5及びモニタ6は、例えば、監視室に配置されている。センタ装置4には、記憶装置5とモニタ6が接続されており、センタ装置4は、所定のデータを記憶装置5に記憶し、モニタ6に監視用画面を表示する。よって、監視員は、センタ装置4を操作して、モニタ6に所望の画像を表示させることができる。記憶装置5には、後述する、各種データを記憶する複数の記憶部5a,5b,5cを含む。
【0017】
図1に示すように、複数の監視カメラ2が、通信ケーブル3によりデイジーチェーン接続されて、すなわち数珠繋ぎで接続されて、センタ装置4に接続されている。図2に示すように、各監視カメラ2は、トンネル101の内壁の天井部分102の最も高い位置よりもやや低いところに、トンネル101の経路方向に沿って、所定の間隔Ltを持って設置されている。所定の間隔Ltは、隣り合う監視カメラ2の撮影範囲PAが一部重なるように、設定される。所定の間隔Ltは、例えば10mである。
【0018】
監視カメラ2間の通信及び監視カメラ2とセンタ装置4間の通信は、イーサネット(登録商標)を利用したデータ通信である。各監視カメラ2からのデータは、デイジーチェーン接続のネットワークを介して、センタ装置4へ送信可能である。また、センタ装置4も、全てのあるいは所望の監視カメラ2へ、撮影画像の送信要求のコマンド、等の各種コマンドを送信することができる。従って、センタ装置4は、監視カメラ2からの動画像の画像情報、認識情報、イベント情報等を、センタ装置4からのコマンドに応じて、デイジーチェーン接続のネットワークを介して、取得することができる。
なお、図1では、センタ装置4が1つのトンネルを監視する例であるが、センタ装置4は、複数のトンネルを監視するようにしてもよい。
【0019】
図3に示すように、車両用監視カメラである監視カメラ2は、細長い直方体の形状のケーシング11を有する。2つの対物光学系12が、細長いケーシング11の一側面に、所定の距離だけ離れて光軸が互いに平行になるように設けられている。ケーシング11内には、各対物光学系の結像位置に、CMOSイメージセンサ等の撮像素子が設けられている。
【0020】
また、ケーシング11の2つの対物光学系12の設けられた面の略中央には、スポットライトユニット21が設けられている。なお、各監視カメラ2は、1つのスポットライトユニットを有する例で説明するが、2つ以上のスポットライトユニットを有していてもよい。
【0021】
図3及び図4に示すように、スポットライトユニット21は、略半球体の形状を有するカバー22を備える。このカバー22は、後述するスポットライトからの光を透過させるため、透明または半透明の部材で構成されている。2つの対物光学系12及びスポットライトユニット21の設けられた面が、道路面103に対向するように、各監視カメラ2は、天井部分102に設置される。
【0022】
なお、ここでは、各監視カメラ2は、ステレオ撮像のために2つの撮像素子を有している例で説明するが、撮像素子は、3つ以上でもよく、少なくとも2つの撮像素子を有していればよい。
【0023】
また、ケーシング11の両端面には、通信ケーブル3を接続するためのコネクタ13が設けられており、複数の監視カメラ2を互いにデイジーチェーン接続することができる。
上述したように、通信ケーブル3は、イーサネット(登録商標)通信用のケーブルであって、電源供給も可能なイーサネット(登録商標)PoE対応のケーブルであるので、監視カメラ2(1)をセンタ装置4に接続し、隣り合う監視カメラ2同士を、通信ケーブル3で接続するだけでよく、監視カメラ2の設置及び増設は容易である。
【0024】
監視カメラ2の1つの撮像部は、視野範囲PArを有し、他方の撮像部は、視野範囲PAlを有する。2つの視野範囲により、監視カメラ2の撮影範囲PAが決定される。
【0025】
センタ装置4は、コンピュータ装置であり、CPU(中央処理装置)、ROM、RAMなどを含み、各監視カメラ2からのデータを受信すると共に、各監視カメラ2へ各種コマンドを送信して、情報を取得することができると共に、各種データ処理を実行することができる。
【0026】
図5に示すように、スポットライトユニット21は、カバー22内に、球体部材23と、スポットライト24と、球体部材23を支持する複数の支持ローラ25と、球体部材23の垂直方向軸に対して球体部材23を回動させる駆動部26と、球体部材23の水平方向軸に対して球体部材23を回動させる駆動部26とを有する。
【0027】
スポットライト24は、球体部材23の表面からレンズ部24aが突出するように、球体部材23に設けられている。このスポットライト24は、内部にLED等の光源を有していて、直線状の光を出射するものである。
【0028】
駆動部26は、モータ26aと、モータ26aに支持部材を介して固着された円盤状のローラ26bとを有して構成されている。ローラ26bは、球体部材23の横側表面に当接されており、モータ26aからの回動力、すなわち、駆動力を球体部材23に伝達する。
【0029】
また、駆動部27は、モータ27aと、モータ27aに支持部材を介して固着された円盤状のローラ27bとを有して構成されている。ローラ27bは、球体部材23の上側表面に当接されており、モータ27aからの回動力、すなわち、駆動力を球体部材23に伝達する。これにより、球体部材23に設けられたスポットライト24の位置が自由に変更され、スポットライト24は、道路面上の所定の位置に光を照射することができる。このように、駆動部26及び27は、スポットライト24の照射位置を変更する照射位置変更部を構成する。
【0030】
(監視カメラの構成)
図6は、監視カメラ2の内部構成を示すブロック図である。
監視カメラ2は、2つの撮像部31、撮像部インターフェース部(以下、撮像部I/Fという)32、立体計測部33、基本監視部34、追加監視部35、判定部36、メモリ37、画像供給部38、通信制御部39、2つの通信インターフェース部(以下、通信I/Fという)40、ライト制御部41、及び2つのコネクタ13を含んで構成されている。
【0031】
監視カメラ2の一部の機能は、監視カメラ2に搭載された中央処理装置(CPU)によって実行されるソフトウェアプログラムにより、実現される。例えば、立体計測部33、基本監視部34、追加監視部35及び判定部36は、ソフトウェアプログfラムにより実現される。なお、監視カメラ2の一部の機能は、デジタル・シグナル・プロセッサ(DSP)により、実現してもよい。
【0032】
各撮像部31は、対物レンズである対物光学系12と、対物光学系12の結像位置に配設されたCMOSイメージセンサ等の撮像素子42を有する。各撮像素子42により撮像して得られた画像データは、撮像部I/F32を介して、立体計測部33と画像供給部38に供給される。
【0033】
立体計測部33は、2つの画像データから距離画像のデータを生成する距離画像生成部である。距離画像のデータは、入力された2つの画像データから、各画素値が距離値である画像データである。立体計測部33は、距離画像データを生成する。なお、距離画像は、各画素値が3次元空間内の位置情報でもよい。立体計測部33は、生成した距離画像の情報を基本監視部34と追加監視部35に供給する。
【0034】
基本監視部34は、距離画像に基づく、停止物体の検出等の、所定の監視処理を実行する基本監視機能の処理を実行する第1の監視処理部である。
本実施の形態では、基本監視部34は、基本監視機能の監視処理部として、停止物体の検出処理部P1と物体の軌跡の検出処理部P2を含む。基本監視部34は、これらの監視処理部とは別に、計測及び記録処理部P3を含む。なお、本実施の形態では、これら3つの処理部P1,P2,P3を基本監視機能の処理部としているが、基本監視機能の処理は、これらに限定されず、他の処理を基本監視部34に含めてもよい。
【0035】
停止物体の検出処理部P1は、ステレオ処理により得られた距離画像から、停止物体を認識して検出する処理を行う。例えば、停止物体の検出処理部P1は、距離画像から認識して得られた物体の位置が、所定の時間以上移動しない状態にあるか否かを判定し、その物体の位置が所定の時間以上移動しない場合に、停止物体ありの異常を、検出する。停止物体は、例えば、停止した車両、道路上の落下物などである。停止物体の検出処理部P1が、距離画像に基づいて、停止物体の検出を行う停止物体検出処理部を構成する。
【0036】
物体の軌跡の検出処理部P2は、距離画像から物体を認識し、認識して得られた物体に関する、位置の変化(道路平面上の位置の変化)から得られた軌跡が所定の軌跡に合致するかしないか、言い換えれば得られた軌跡が所定の軌跡と不一致であるか否か、を検出する処理を行う。所定の軌跡とは、例えば移動物体の軌跡が略直線状である軌跡である。軌跡は、認識された物体の位置、例えば重心位置、の変化である。物体の進行方向に対する移動量が所定量以上であるような蛇行運転の軌跡は、この所定の軌跡に合致しないという異常として、検出される。
【0037】
計測及び記録処理部P3は、距離画像から物体を認識し、認識して得られた各物体の位置の変化量から各物体の速度(例えば車速)、所定の時間内に撮像領域内を通過した車両の数(すなわちカウント値)、監視領域に入った時刻及び位置、監視領域から出た時刻及び位置、色などの属性データ、等の計測あるいは認識を行う計測処理を行う。
【0038】
さらに、計測及び記録処理部P3は、認識された通行車両の識別情報を生成して、上述した計測データと、その識別情報を関連付けて、ログデータとして、記憶部であるメモリ37に記録する記録処理を含む。すなわち、計測及び記録処理部P3は、距離画像に基づいて認識された通行車両の識別情報を生成して、その識別情報と、その認識された通行車両についての時刻情報等とをメモリ37に記録する記録処理部を構成する。ここでは、ログデータは、基本監視部34から判定部36を介してメモリ37に記憶される。なお、ログデータの記録は、基本監視部34がメモリ37に直接書き込むようにしてもよい。
追加監視部35は、基本監視部34の監視処理とは別の追加監視機能の処理を実行する第2の監視処理部である。具体的には、追加監視部35は、異常の内容に応じた異常処理、センタ装置4からのコマンドに応じたコマンド対応処理、等の処理を行うための、複数の追加処理部Q1,Q2,Q3,・・・Qmを含む(mは整数)。なお、図6において、追加処理部Q1,Q2が異常有りの判定時に実行すべき処理部であり、追加処理部Q3〜Qmがコマンド対応処理のための処理部である。
【0039】
異常処理は、基本監視部34において検出された異常の内容に応じて、判定部36により選択されて実行される処理である。基本監視部34において異常が検出されたときに実行される追加処理部が、異常時の処理部として、追加監視部35に含まれる。
【0040】
例えば、停止物体の検出に対応する追加処理部Q1は、静止画データに基づいて、停止物体が車両であるのか、人であるのかを判定して、車両の場合は、破損状況、停止位置、向き(すなわち道路の走行方向に対して平行な方向を向いているのか、斜め方向を向いているのか)、大きさ、車両の台数、等々の検出をし、人の場合は、その位置、姿勢(横になっているのか(倒れているのか)、道路上に立っているのか、等)、人数、等々の検出をする処理部である。停止物体の大きさは、距離画像データから算出あるいは推定することができ、さらに、形状の情報から、停止物体が人であるか否かの判定をすることができる。
【0041】
また、停止物体の検出に対応する追加処理部Q1は、停止物体の位置情報に基づき、停止物体の位置を検出するとともに、停止物体にスポットライト24の光を照射させるライト点灯処理を実行する。このライト点灯処理により、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。この追加処理部Q1が、停止物体の位置を検出するとともに、停止物体にスポットライト24の光を照射させるためのライト点灯信号を出力するライト点灯処理部を構成する。なお、ライト制御部41によって実行される処理については、後述する。
【0042】
また、物体の軌跡が所定の軌跡に合致しない場合に対応する追加処理部Q2は、後述するRAM38aの動画データ(すなわち複数のフレームデータ)又はメモリ37に格納されたログデータに基づいて、車線変更であるのか、減速であるのか、物体の分離であるのか、を判定する。車線変更は、車両の避走、蛇行、回転(スピン)、接触(壁面への接触、車両同士の接触)、等を検出することによって、判定することができる。減速は、ログデータに基づいて判定することができる。
【0043】
さらに、物体の軌跡から、車両から分離した物の有無を検出することができる。よって、分離の検出と、落下物の大きさ及び落下物が人であるか否かの判定とをすることができるので、車両から荷物が落下したのか、二輪車が転倒して人が投げ出されているのか、車両から降りた人の移動方向、等の検出をすることができる。
以上のように、追加監視部35は、基本監視部34の処理結果に基づいて、実行可能に構成されている。
【0044】
また、追加監視部35中のコマンド対応処理とは、ログデータ送信コマンド、人検出コマンド、画像送信コマンド、ライト点灯コマンド、ライト危険点灯コマンド、等のセンタ装置4からのコマンドに応じて、判定部36等により指定されて実行される処理である。コマンドに応じて実行される追加処理部が、追加監視部35に含まれる。センタ装置4からのコマンドは、通信制御部39を介して、判定部36および画像供給部38に供給される。追加監視部35は、コマンドに基づいて、距離画像に基づく監視処理を実行する。
【0045】
例えば、ログデータ送信コマンドに対応するログデータ送信処理Q3は、センタ装置4からのコマンドがログデータの送信を指示するコマンドである場合に、コマンドで指定された、メモリ37に格納されているログデータを読み出して送信する処理である。人検出コマンドに対応する人検出処理Q4は、センタ装置4からのコマンドが人の検出を指示するコマンドである場合に同様に実行され、撮像画像の中から人を検出して、検出結果をセンタ装置4へ送信する処理である。監視カメラ2の画像データは、距離データであるので、人を正確に検出することができる。
【0046】
画像送信コマンドに対応する画像送信処理Q5は、センタ装置4からのコマンドが画像データの送信を指示するコマンドである場合に通信制御部39が画像供給部38から画像データを読み出して、監視カメラ2で撮像して得られた画像データを送信する処理である。センタ装置4からのコマンドには複数の種類があり、また一つのコマンドが複数の追加処理を実行させるようなコマンドも有るので、追加監視部35は、そのコマンドに対応する処理を実行するに必要な数の処理部を含む。
【0047】
ライト点灯コマンドに対応するライト点灯処理Q6は、センタ装置4からのコマンドが停止物体にスポットライト24の光を照射させる場合に実行され、追加処理部Q1のライト点灯処理と同様の処理を実行する処理である。すなわち、ライト点灯処理Q6により、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。このライト点灯コマンドは、センタ装置4から停止物体をカバーしている、言い換えると、停止物体を撮影している監視カメラ2に対して送信される。なお、ライト制御部41によって実行される処理については、後述する。
【0048】
ライト危険点灯コマンドに対応するライト危険点灯処理Q7は、センタ装置4からのコマンドがスポットライト24に危険点灯を指示するコマンドである場合に実行され、スポットライト24を点滅、回転または回動させる処理である。このライト危険点灯コマンドは、センタ装置4から停止物体を撮影している監視カメラ2以外の監視カメラ2に送信される。特に、ライト危険点灯コマンドは、停止物体を撮影している監視カメラ2の1つ前の監視カメラ2からトンネルの入り口の監視カメラ2に対して送信される。これにより、停止物体等の危険があることを後続の車両のドライバに対して認識させることができる。ライト危険点灯処理Q7により、スポットライト24を点滅、回転または回動させるための危険点灯信号が、判定部36及び通信制御部39を介してライト制御部41に供給される。
【0049】
このライト危険点灯処理Q7が、停止物体を検出した監視カメラ2のスポットライト24と異なる処理、例えば、スポットライト24を点滅、回転または回動させるためのライト危険点灯信号を出力するライト危険点灯処理部を構成する。なお、スポットライト24を回転及び回動させる際の回転データ及び回動データは、メモリ37に格納させている。また、ライト制御部41によって実行される処理については、後述する。
【0050】
なお、センタ装置4からのコマンドには、全ての監視カメラ2に対するグローバルコマンドと、特定の監視カメラ2に対するコマンドの2種類がある。
以上のように、追加監視部35は、基本監視部34の処理結果に基づいて、実行可能であると共に、センタ装置4からのコマンドに応じて実行可能に構成されている。
【0051】
判定部36は、基本監視部34及び追加監視部35からの検出結果あるいは判定結果に基づいて、ルールベースの判定処理を行うと共に、必要な追加監視部35に含まれる複数の処理部の中から実行すべき処理部を、そのルールに従って選択して実行させる処理を行う。さらに判定部36は、センタ装置4からのコマンドの内容に応じて、追加監視部35の中の複数の追加処理部の中から、実行すべき処理部を選択して実行させる処理を行う。
【0052】
具体的には、基本監視部34により異常が検出された場合、判定部36は、後述するような、追加解析処理、異常対応処理の実施指示処理、通報処理、及び画像送信処理を実行する。さらに、判定部36は、センタ装置4からコマンドを受信すると、コマンドの内容を解析し、そのコマンドに対応する処理を、追加監視部35内の対応する追加処理部を実行する。
【0053】
また、判定部36の処理内容は、ルールベースで定められるので、判定部36は、ルールによる判定のための基準データ及び判断ルールを含む。その基準データと判断ルールは、判定部36のプログラム中に記述されてもよいし、メモリ37内に記憶されていてもよい。基準データ及び判断ルールを変更することによって、判定部36が実行を指示する、基本監視部34及び追加監視部35内の処理内容を変更することができる。さらに、判定部36は、メモリ37に格納されたログデータを用いて、判定を行うことも可能である。判定部36の異常処理とコマンド処理の詳細については、後述する。
【0054】
メモリ37は、上述したログデータを記憶する記憶部である。メモリ37に格納されるログデータの構造については後述する。
【0055】
画像供給部38は、2つの撮像部31により撮像して得られた画像データの少なくとも一方の撮像部からの、最新の複数フレームの画像データを格納可能なRAM38aを有している。画像供給部38のRAM38aに格納された1以上の画像データは、判定部36により読み出し可能である。後述するように、RAM38aに格納された1以上の画像データは、センタ装置4からのコマンドに応じて、あるいは判定部36からの指示に応じて、センタ装置4へ送信される。
【0056】
通信制御部39は、デイジーチェーン接続された通信ケーブル3を介して、センタ装置4及び他の監視カメラ2との通信を行うための制御部である。特に、通信制御部39は、センタ装置4からのコマンドを受信するコマンド受信部を構成する。なお、本実施の形態では、センタ装置4からの画像データの送信コマンドを受信すると、通信制御部39が画像供給部38から画像データを読み出して、センタ装置4へ送信しているが、判定部36がコマンドを解釈して、RAM38aから画像データを読み出して、センタ装置4へ送信するようにしてもよい。
【0057】
2つの通信I/F40は、通信制御部39とコネクタ13との間のインターフェースである。
【0058】
ライト制御部41は、上述した追加処理部Q1またはライト点灯処理Q6によるライト点灯信号が供給された場合、静止画データに基づいて、事故などにより停止した車両、道路上の落下物などの停止物体の位置を取得する。ライト制御部41は、この停止物体の位置情報に基づき、停止物体に光を照射するための、スポットライト24の角度を算出する。ライト制御部41は、算出された角度情報に基づき、モータ26a及び27aを制御し、スポットライト24を点灯する。これにより、停止物体にスポットライト24の光を照射することができる。
【0059】
また、ライト制御部41は、上述したライト危険点灯処理Q7による危険点灯信号が供給された場合、スポットライト24を点滅、回転または回動させる制御を行う。ここでは、スポットライト24を回転させる制御について説明する。ライト制御部41は、スポットライト24を回転させるための危険点灯信号が供給された場合、スポットライト24を回転させるための回転データをメモリ37から読み出す。ライト制御部41は、読み出した回転データに基づき、モータ26a及び27aを制御し、スポットライト24を点灯する。具体的には、ライト制御部41は、回転データに基づき、スポットライト24が重力方向に対して所定の角度を有するようにモータ27aを駆動した後、モータ27aの駆動を停止する。そして、ライト制御部41は、モータ26aの回転が継続するように、モータ26aを駆動することで、スポットライト24を重力方向の軸に対して回転させる。
【0060】
(監視カメラにおける基本監視処理)
次に、基本監視処理について説明する。
図7は、基本監視処理の流れの例を示すフローチャートである。本実施の形態では、上述したように、基本監視部34の処理は、CPUによって実行されるプログラムの一部の機能として実行される。
【0061】
立体計測部33から距離画像データが取得される(S1)。距離画像データに基づいて、基本監視部34における、停止物体の検出処理部P1と、物体の軌跡の検出処理部P2とが、基本監視処理として実行される(S2)。
【0062】
停止物体の検出処理部P1は、背景以外の物体の認識を行い、フレーム間での物体の位置に変化があるか否かに基づいて、停止物体の検出を行う。立体形状の大きさが所定の大きさ以上の物体が、停止物体の検出対象として選択される。距離画像データに基づいて停止物体の検出を行っているので、物体の体積が検出でき、検出すべき停止物体を精度良く認識し、検出することができる。
【0063】
物体の軌跡の検出処理部P2は、認識された物体の軌跡を、フレーム間の物体の位置情報から検出し、その軌跡が所定の軌跡に合致するかしないかを検出あるいは判定する。
【0064】
この軌跡の検出も、距離画像データに基づいて行っているので、物体の軌跡を精度良く検出して判定することができる。
次に、ログデータ記録処理が実行される(S3)。この処理は、上述した計測及び記録処理部P3により実行される。
【0065】
そして、判定部36は、上記の停止物体の検出処理部P1と物体の軌跡の検出処理部P2のいずれかで、異常が検出されたか否かを判定し(S4)、異常が無ければ(S4:NO)、処理は終了し、異常が有れば(S4:YES)、異常処理を実行する(S5)。
なお、図7の処理は、監視カメラ2が動作中は、常に繰り返し実行されている。
【0066】
(監視カメラにおけるコマンド処理)
次に、コマンド処理について説明する。図8は、コマンド処理の流れの例を示すフローチャートである。
監視カメラ2は、センタ装置4からのコマンドを受信したか否かを判定する(S11)。コマンドは、通信制御部39を介して、判定部36により受信される。コマンドを受信しないときは(S11:NO)、処理は、終了し、コマンドを受信したときは(S11:YES)、受信したコマンドを解析する、すなわちコマンドの内容を判定する(S12)。
【0067】
判定部36は、コマンドに対応する処理部を、追加監視部35の中から選択して、その処理を実行する(S13)。例えば、コマンドがログデータの送信要求コマンドであれば、判定部36は、追加監視部35の中からそのコマンドに対応する処理部Q3を選択して、メモリ37から指定されたログデータを読み出して、センタ装置4へ送信する。コマンドが、人の検出処理を行う人検出コマンドであれば、追加監視部35の中からそのコマンドに対応する処理部Q4を選択して、画像データから人を検出する処理が実行される。
【0068】
コマンドに対応する処理の結果、何らかの異常が検出されたか否かが判定され(S14)、人が検出された等の異常が無ければ(S14:NO)、異常が無かった旨の情報を送信したり、要求された情報を送信する、等の、センタ装置4への回答処理を実行して(S16)、処理は終了し、異常が有れば(S14:YES)、異常処理を実行する(S16)。
【0069】
(監視カメラにおける異常処理)
次に、異常処理について説明する。図9は、図7及び図8における異常処理の流れの例を示すフローチャートである。
基本監視処理あるいは追加監視処理において検出された異常の内容に応じて実行すべき処理の内容が、ルールベースで予め設定されている。判定部36は、その予め決められたルールベースの内容に従って、図9に示す処理を実行する。
判定部36は、異常が検出されると、ルールベースを参照して、処理内容を決定する(S21)。
【0070】
そして、判定部36は、その決定された処理内容に従って、異常対応処理の実施指示処理(S22)、追加解析処理(S23)、通報処理(S24)、画像送信処理(S25)及びライト点灯処理(S26)を実行する。これらの5つの処理は、互いに並列に実行され、それぞれ処理内容決定処理(S21)で決定された内容を実行する。処理の内容がルールベースで予め設定されているので、異常の内容によっては、処理内容決定処理(S21)において、5つの処理全てを実行しないように、決定される場合もある。
【0071】
異常対応処理の実施指示処理(S22)は、センタ装置4を介さずに、監視カメラ2から他の設備、例えばトンネル内に設置された放送設備、トンネルの出入り口に設置された情報表示パネル、に直接、動作する指示を与える処理である。他の設備が、通信ケーブル3で形成されるイーサネット(登録商標)の通信上に接続されている場合に、監視カメラ2は、他の設備と通信をすることができる。
【0072】
例えば、通信ケーブル3と同じイーサネット(登録商標)に接続されている通信可能な設備として、放送設備と情報表示パネルがあれば、異常対応処理の実施指示処理(S22)は、その放送設備等の制御装置に対する所定の音声出力の指示コマンドの送信、等の処理である。
【0073】
図1において、設備の制御装置43が、イーサネット(登録商標)に接続されていて、監視カメラ2からのコマンドを受信可能となっている。この場合、ある監視カメラ2(k)が、異常対応処理の実施指示処理(S22)に従って、その制御装置43へ所定のコマンドを送信すると、その設備は、そのコマンドに指定された動作を実行する。よって、監視カメラ2から直接設備に対して、所望の動作指示をすることができるので、異常時の対応を迅速に行うことができる。
【0074】
また、異常対応処理の実施指示処理(S22)は、他の監視カメラ2へのコマンド送信も含まれる。例えば、避走車両の検出がされた場合に、その車両の進行方向にある他の監視カメラ2(隣の監視カメラあるいは、数台先の監視カメラ)へ、避走車両の速度と軌跡データをセンタ装置4へ送信させるような処理を実行させるコマンドを、送信する。これにより、センタ装置4は、検出された避走車両の走行状態を、迅速に監視することができる。
【0075】
以上のように、異常対応処理の実施指示処理(S22)は、基本監視部の処理結果が所定の異常が有りの判定である場合、発生した所定の異常の種類に応じて、所定の設備の所定の動作の指示あるいは他の監視カメラ2に所定の処理の実行を指示するコマンドを、所定の設備あるいは他の監視カメラ2に送信する実行コマンド送信処理部を構成する。
【0076】
追加解析処理(S23)は、上述した追加監視部35内の追加処理部の処理である。よって、異常の内容に応じた追加解析を行うことができる。
また、通報処理(S24)は、検出された異常の内容に応じた所定のデータ、メッセージ等の所定の情報を、センタ装置4へ送信する処理である。例えば、判定部36が、異常の内容から危険度レベルを判定する処理を実行した場合は、その危険度レベルの情報も、センタ装置4へ送信される。
【0077】
画像送信処理(S25)は、異常を検出した監視カメラ2が、所定の画像データを、画像供給部38から読み出して、センタ装置4へ送信する処理である。
ライト点灯処理(S26)は、停止物体にスポットライト24の光を照射させるためのスポットライト点灯信号をライト制御部41に出力する処理である。なお、ライト制御部41での処理については、後述する。
【0078】
追加解析処理(S23)の実行後、所定の判定処理が実行される(S27)。
【0079】
上述したように、S22からS27の処理の内容は、ルールベースで定められたものであり、異常の内容に応じて異なっている。これらの処理が実行されると、検出された異常が終結したか否かが判定される(S28)。
【0080】
異常が終結していない場合は(S28:NO)、処理は、S21に戻り、異常が終結した場合は(S28:YES)、終結処理が実行されて(S29)、処理は、終了する。
【0081】
例えば、基本監視部34の停止物体の検出処理部P1により停止物体の有りの異常が検出された場合、判定部36は、その停止物体の検出に対応する予め決められた追加処理部Q1を、追加解析処理(S23)として実行する。同時に、判定部36は、異常対応処理の実行指示処理(S22)において、情報表示パネルの制御装置に対して、「トンネル中、停止車両有り」等のメッセージを表示するように、コマンドを送信する。さらに、判定部36は、通報処理(S24)において、センタ装置4へ停止車両の検出がされたことのメッセージを送信する。さらに、判定部36は、画像送信処理(S25)において、その停止物体の画像データをセンタ装置4へ送信する。
【0082】
判定処理(S27)は、追加解析処理(S23)の処理結果に基づく処理であり、追加処理部Q1の処理結果に応じた処理を実行する。よって、例えば、追加処理部Q1により、人が検出された場合には、判定部36は、人が検出されたことの異常を検出する。
【0083】
異常が終結していない場合には、処理は、処理内容決定処理(S21)に戻る。そして、判定部36は、再度、追加解析処理により検出された異常も加えて、処理内容を決定し、S22からS25の処理を実行する。
【0084】
例えば、追加処理部Q1において、人が検出されたときには、異常対応処理の実行指示処理(S22)において、放送設備の制御装置に対して、「他の車両に注意して下さい。」等の音声メッセージをトンネル内に放送するように、コマンドを送信する。
【0085】
別の例として、基本監視部34の物体の軌跡の検出処理部P2により物体の軌跡が所定の軌跡ではないと判定された場合、判定部36は、物体の軌跡が所定の軌跡に合致しない場合に対応する追加処理部Q2を、追加解析処理として実行し、その追加処理部Q2の結果に基づく判定処理(S27)を実行する。
【0086】
終結処理(S29)は、異常状態が検出されなくなったので、センタ装置4への異常状態の終了したことのメッセージ等の送信処理、他の設備へ送信したコマンドに基づく動作の終了指示のコマンドの送信処理、等が実行される。
【0087】
以上のように、監視カメラ2は、基本監視部34と追加監視部35を有して、通常は、基本監視部34の処理を実行し、基本監視部34において異常が検出された場合、あるいはセンタ装置4からコマンドを受信した場合は、予めルールベースで設定された処理部を実行する。
【0088】
図10は、図9におけるライト点灯処理の流れの例を示すフローチャートである。この図10の処理は、ライト制御部41によって実行される。
【0089】
まず、スポットライト点灯信号が供給された否かが判定される(S31)。スポットライト点灯信号が供給されていない場合は(S31:NO)、処理は、S31に戻り、スポットライト点灯信号が供給された場合は(S31:YES)、停止車両あるいは落下物の位置が取得され(S32)、取得された位置情報からスポットライト24の角度が算出される(S33)。そして、算出された角度情報に基づき、モータ26a及び27aが制御される(S34)。最後に、スポットライト24の点灯が実行され(S35)、処理を終了する。
【0090】
以上のように、監視カメラ2は、スポットライト24を備え、トンネル内に停止物体が存在した場合、ライト点灯処理を実行することにより、停止物体に対してスポットライト24からの光を照射する。この結果、監視カメラ2は、トンネル内を走行中のドライバに、事故原因となる停止物体を容易に認識させることができる。
【0091】
(センタ装置における異常処理)
監視室の監視員は、モニタ6に表示される情報、画像などを見ながら、トンネル内の交通状況を監視する。監視員は、上述したように特定の監視カメラ2を指定して所望の処理を実行させて、その監視カメラ2を制御することができる。そして、センタ装置4は、複数の監視カメラ2からの各種情報を受信して、異常が検出された場合には、所定の処理を実行する。
【0092】
図11は、センタ装置4における異常処理の流れの例を示すフローチャートである。図11の処理は、センタ装置4のCPUによって実行される。
センタ装置4は、個別カメラからの情報を入手し(S41)、所定の基準に基づいて、状況を判定し、その判定結果に応じた処理内容を決定する(S42)。
【0093】
その状況を判定するために所定の基準データは、記憶装置5の基準データ記憶部5aに記憶されている。また、判定された状況に応じて実行すべき処理内容のデータも、記憶装置5内の処理内容データ記憶部5bに記憶されている。
【0094】
センタ装置4のCPUは、S42における状況判定の結果、異常ありと判定されたか否かを判定し(S43)、異常がなければ(S43:NO)、処理は、S41に戻る。異常があれば(S43:YES)、センタ装置4は、異常対応処理の実行指示処理(S44)、警告画面表示処理(S45)、操作入力確認処理(S46)及びライト危険点灯処理(S47)を実行する。これらの4つの処理は、互いに並列に実行され、それぞれS42において決定された内容を実行する。
【0095】
異常対応処理の実行指示処理(S44)は、例えば、センタ装置4に接続された設備、例えばトンネルの出入り口に設置された情報表示パネル、に対する指示を与える処理、特定の監視カメラ2へのコマンド指示送信処理、等である。
【0096】
例えば、基本監視部34の物体の軌跡の検出処理部P2により物体の軌跡が所定の軌跡ではないと判定された場合にその情報を入手すると、情報表示パネルに「走行注意」等の所定のメッセージを表示させるためのコマンドが、情報表示パネルに送信される。その結果、他の車両のドライバは、より注意した運転を心掛けることができる。そのようなコマンドの送信は、予め自動的に行われる設定になっている場合には、監視員は、特に、情報表示パネルへの指示操作をしなくてよい。その設定内容は、処理内容データ記憶部5bに記憶される。
【0097】
異常対応処理の実行指示処理(S44)により、センタ装置4は、例えば、他の特定の監視カメラ2に対して、画像データを送信させるためのコマンドを送信するようにすることもできる。その結果、所定の軌跡に合致しない走行をしている車両がその後通過すると想定される場所の画像がモニタ6に表示されるので、監視員は、その車両がその監視カメラ2の前を通過するのを待ち伏せして、通過したときの走行状況を見て確認することができる。
以上のようにして、異常対応処理の実行指示処理(S44)の処理によって、異常時における所定の処理の自動化を実現することができる。
【0098】
警告画面表示処理(S45)は、図13に示すようなモニタ6の画面上に、所定のメッセージを表示する処理である。この警告画面表示処理(S45)によって、例えば、ある異常が発生したときは、「・・を操作して下さい。」等の対応操作方法を示すすなわちアドバイスするメッセージが表示される。そのメッセージ表示を見て、監視員に所定の操作をさせることができる。発生した異常に応じて、どのようなメッセージを、どのような順番で表示するかは、処理内容データ記憶部5bに予め記憶されている。
【0099】
また、操作入力確認処理(S46)は、警告画面表示処理(S45)によって指示された操作が、適切に行われたか否かを確認する処理である。例えば、所定の順番で操作させるべき操作が、所定の順番で正しく行われているか否かが判定され、操作内容及び順番が適切でないときには、操作入力確認処理(S46)は、操作すべき内容をモニタ6上に表示する。
【0100】
すなわち、センタ装置4は、いずれかの監視カメラ2の判定部36から所定の異常の通知を受けると、所定の操作内容を示すメッセージを表示装置に表示する表示処理と、所定の操作内容の操作入力を監視して所定の操作内容が入力されているかを確認する操作入力確認処理を実行する。
【0101】
ライト危険点灯処理(S47)は、スポットライト24を点滅、回転または回動させるための危険点灯信号をライト制御部41に出力する処理である。なお、ライト制御部41での処理については、後述する。また、センタ装置4における異常処理としては、ライト危険点灯処理(S47)に代わりライト点灯処理が実行されることもあるが、このライト点灯処理の処理内容は、上述した図10と同様の処理のため、説明を省略する。
【0102】
S44〜S47の処理の結果、総合判定が行われる(S48)。異常発生後のデータすなわち経緯データは、記憶装置5に記録される。総合判定の基準も、記憶装置5の基準データ記憶部5aに記憶されている。総合判定処理(S48)は、異常が発生してからの経緯に基づいて、所定の処理が実行されて、異常の発生もなくなり、異常が終結したか否かが判定される。
【0103】
総合判定処理(S48)の後、異常が終結したか否かが判定され、異常が終結していなければ(S49:NO)、処理は、S41に戻り、異常が終結していれば(S49:YES)、終結処理を実行して(S50)、処理は終了する。
【0104】
よって、センタ装置4は、各監視カメラ2からの情報に基づいて、異常の判定を行い、その異常に応じた処理を実行すると共に、所定のメッセージ等をモニタ6の画面上に表示し、かつ異常に対応する所定の操作が正しく行われたか否かの確認を行う。よって、異常発生時に、監視員がその異常の内容を確認して、必要な設備に対する処理の全てを行う必要もなく、かつ操作内容がガイダンスとして表示されるので、迅速な対応も可能となり、さらに操作ミスも防止することができる。
【0105】
図12は、図11におけるライト処理の流れの例を示すフローチャートである。この図12の処理は、ライト制御部41によって実行される。
【0106】
まず、危険点灯信号が供給された否かが判定される(S51)。危険点灯信号が供給されていない場合は(S51:NO)、処理は、S51に戻り、危険点灯信号が供給された場合は(S51:YES)、メモリ37からスポットライト24の回転データが読み出される(S52)。そして、読み出されたスポットライト24の回転データに基づき、モータ26a及び27aが制御される(S53)。最後に、スポットライト24の点灯が実行され(S54)、処理を終了する。
【0107】
以上のように、センタ装置4は、トンネル内に停止物体が存在した場合、停止物体に光を照射している監視カメラ2以外の監視カメラ2に対し、ライト危険点灯処理を実行させる。停止物体に光を照射していない各監視カメラ2は、ライト危険点灯処理により、例えば、各監視カメラ2が備えるスポットライト24を回転させる。このように、センタ装置4は、停止物体に光を照射していない各監視カメラ2に対し、停止物体に光を照射している監視カメラ2とは異なる動作を実行させる。この結果、監視カメラ2及びセンタ装置4は、トンネル内を走行中のドライバに、トンネル内に事故原因となる停止物体が存在することを容易に認識させることができる。
【0108】
(監視画面)
図13は、モニタ6上に表示される監視画面の例を示す図である。モニタ6の画面51内には、監視対象トンネルの模式図を表示する表示部52と、トンネルの各出入り口の入車台数と出車台数の表示部53と、監視画像の表示部54と、トンネル内に存在する車両の台数を表示する表示部55とを含む。
【0109】
表示部52は、トンネルの模式図の各出入り口の近傍には、行き先を示す、「・・方面」という文字が併せて表示されている。
表示部53は、トンネルの模式図の各出入り口の近傍に配置され、入車台数と出車台数をリアルタイムで表示する。台数は、例えば、日付の始まる午前零時からの累積台数などである。
【0110】
表示部54は、複数の監視カメラ2の中から選択された特定の監視カメラ2から撮影画像を取得して、表示している。上述したように、監視員がセンタ装置4を操作して、監視したい場所の監視カメラ2を選択して、その監視カメラ2に画像送信コマンドを送信することによって、表示部54にその監視カメラ2の画像を表示させることもできる。
【0111】
表示部55は、そのときにトンネル内に存在する車両の数を、リアルタイムで表示する。例えば、監視カメラ2(1)と2(n)から、上りと下りの各車線のそれぞれについて、認識した車両であってトンネルに入った車両と出た車両の数の情報を常に送信させ、上りと下りのそれぞれについて入った車両から出た車両の差分を計算することによって、センタ装置4は、トンネル内に存在する車両の数を、表示することができる。
【0112】
図13の画面は、常にモニタ6に表示され、上述したアドバイスメッセージ等の表示は、図13の画面上に例えば、ポップアップウインドウにより行われる。
【0113】
図14は、図13の画面の表示処理の流れの例を示すフローチャートである。センタ装置4は、特定の監視カメラ2、例えば監視カメラ2(1)と2(n)、から、入った車両と出た車両の数の情報を取得し、所定演算を実行する(S61)。所定演算とは、上述した表示部53と55の台数を表示するための演算である。
【0114】
そして、センタ装置4は、特定の監視カメラ2からの画像データを取得し(S62)、S61とS62で得た情報に基づき、図13の画面データを更新する(S63)。その結果、モニタ6に表示される画面51の内容は、リアルタイムの表示となる。
【0115】
(ログデータ)
各監視カメラ2のメモリ37には、上述したようにログデータが格納される。計測及び記録処理部P3は、立体計測部33において得られた距離画像に基づいて、認識して得られた各物体について、識別子を付与し、その物体について、図15に示す各データを取得或いは計算して得て、メモリ37に記憶する。
メモリ37の容量は、制限があるので、新しいデータが記録されるときは、最も古いデータが消去される。メモリ37には、例えば、過去、数十時間のデータが記憶される。
【0116】
図15は、ログデータのデータ構造を示す図である。図15のログデータは、監視カメラ2の上りと下り毎に生成されて記憶されるデータである。
図15は、監視カメラ2の識別番号(図15では、監視カメラ2(k)として示されている)の上りの車線のログデータを示す。ログデータ61は、上りと下り別に、カメラ識別番号(カメラ#(上り))、車両ID、時刻(入)、時刻(出)、物体の複数の属性、速度、監視領域内に入ったときの位置(入)、監視領域内から出たときの位置(出)、監視領域内の軌跡、等のデータを含む。
【0117】
車両IDは、監視カメラ2毎に付与されるので、所謂ローカルIDである。時刻(入)と時刻(出)は、それぞれ、認識された物体が監視領域内に入った及び出た時刻であり、ミリ秒単位の時刻データである。属性は、例えば、認識された物体の色、体積、高さ、形状などのデータである。体積、高さ、形状などは、距離画像データに基づいて算出される。速度は、監視領域内を走行する物体の位置の変化から演算により算出されるデータである。
【0118】
位置(入)と位置(出)は、それぞれ、監視領域内の位置であり、例えば、監視領域のXY平面上において、物体が監視領域に入ったときの位置と監視領域から出て行ったときの位置のデータである。軌跡は、監視領域のXY平面上における、認識された物体の位置、例えば先頭位置、重心位置等、の変化を示す軌跡データである。
図15に示すデータ以外のデータもログデータとしてメモリ37に記憶してもよい。
【0119】
上述したように、メモリ37のログデータ61は、車両毎に生成されるが、ローカルIDのデータである。センタ装置4は、全てのあるいは一部の監視カメラ2からログデータを収集することができる。
【0120】
センタ装置4は、各監視カメラ2から収集したログデータ中の時刻(入)、時刻(出)、位置(入)及び位置(出)のデータを用いて、各監視カメラ2からの複数の車両IDを、互いに関連付ける処理を行うことができる。
【0121】
図16は、センタ装置4における車両IDの関連付けを説明するための図である。図16では、連続する監視カメラ2(k)から2(k+4)のそれぞれの撮影範囲が、PA(k)〜PA(k+4)として示されている。上述したように、隣り合う監視カメラ2の撮影範囲PA(点線で示す)は、重なっている。
【0122】
撮影範囲PA内には、ログデータ中、時刻(入)、時刻(出)、位置(入)及び位置(出)のデータを取得するための監視領域MRが設定されている。図16では、撮影範囲PA(k)〜PA(k+4)中に、それぞれ、監視領域MR(k)〜MR(k+4)が設定されている。隣り合う監視カメラ2の監視領域MRは、接するように設定される。この設定は、例えば、トンネル101内に監視カメラ2を設置した後に、各監視カメラ2からの撮影画像に基づいて、行われる。よって、隣り合う監視カメラ2の2つの監視領域MRが接して線(以下、境界線という)TL上の位置は、2つの監視領域MR間で関連付けることができる。
【0123】
そして、センタ装置4は、隣り合う監視カメラ2同士の境界線TL上の位置の関連情報を、記憶装置5に予め記憶しておく。その位置の関連情報は、記憶装置5の関連情報記憶部5cに記憶される。関連情報は、例えば、境界線TL上における、2つの監視領域MRの位置の変換式であり、全ての境界線TLについて生成されて、関連情報記憶部5cに記憶される。センタ装置4は、位置の関連情報に基づいて、隣り合う2つの監視領域MRの一方から見た境界線TL上の位置と、他方から見た同じ境界線TL上の位置が同じ位置であるかを判定することができる。
【0124】
図16には、上りと下りのそれぞれにおけるある車両の軌跡が、点線で示されている。上りにおける監視領域MR(k)から出た車両の位置P1と、その隣の監視領域MR(k)から出た車両の位置P2は、それぞれの監視カメラ2(k)と2(k+1)から得られるので、監視カメラ2(k)の記録した時刻(出)と監視カメラ2(k+1)の記録した時刻(入)が一致し、かつ監視カメラ2(k)の記録した位置(出)と監視カメラ2(k+1)の記録した位置(入)が一致した場合は、2つの監視カメラ2で別個に生成されたログデータは、同じ車両についてのログデータと決定される。
【0125】
そのために、センタ装置4は、複数の監視カメラ2の監視する領域における、監視カメラ同士の位置を関連付ける関連情報を有し、その関連情報に基づいて、複数の監視カメラが生成した車両の識別情報を関連付ける処理を行う関連付け処理部を有する。
【0126】
その結果、各監視カメラ2において別個に生成されたローカルIDの車両IDを有する2つのログデータは、同じ車両のものであると判定できるので、一つの車両IDのログデータとして纏めることができる。言い換えると、車両IDをグローバルIDに変換することができる。
【0127】
なお、ログデータには、各種属性データが含まれるので、複数のログデータを、同じ車両についてのログデータと決定するときに、属性データを確認用データとして用いるようにしてもよい。
【0128】
センタ装置4は、全ての監視カメラ2のログデータを収集してこのような処理を行うことによって、全ての車両についての、トンネルの入口から出口までの道路上の走行状態のデータを生成して得ることができる。そのデータは、各車両のトンネル内の走行履歴データである。
【0129】
よって、事故等の何らかのイベントが発生した直後に、センタ装置4が全ての監視カメラ2に対してログデータを送信するログデータ送信コマンドを送信して、全ての監視カメラ2のログデータを収集して、上記のような各車両の走行履歴データを生成する。生成された各車両の走行履歴データは、事故直後の事故に関わる車両の走行状態を示すので、事故の原因を調査する者にとっては、有効な情報となる。
【0130】
なお、図16では、隣り合う監視カメラ2の監視領域MRは、接するように設定されているが、重なって、あるいは完全に接していなくてもよい。重なっている場合は、重なっている領域の位置情報の関連付けを行うことによって、2つのログデータの関連付けを行うことができる。また、隣り合う監視カメラ2の監視領域MRが接していない場合は、その間の距離に応じた時間と位置の推定処理を行うことによって、2つのログデータの関連付けを行うことができる。
【0131】
以上のように、上述した本実施の形態による通行車両監視システムによれば、道路上の車両等を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供することができる。
【0132】
なお、上述した実施の形態は、通行車両監視システム及び車両用監視カメラをトンネルの車両を監視する例であるが、上述した通行車両監視システム及び車両用監視カメラは、トンネル内の車両の監視だけでなく、通常の道路、高速道路等の車両の監視にも適用できるものである。
【0133】
本発明は、上述した実施の形態に限定されるものではなく、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。
【符号の説明】
【0134】
1 通行車両監視システム、2 監視カメラ、3 通信ケーブル、4 センタ装置、5 記憶装置、5a 基準データ記憶部、5b 処理内容データ記憶部、11 ケーシング、12 対物光学系、13 コネクタ、21 スポットライトユニット、22 カバー、23 球体部材、24 スポットライト、25 支持ローラ、26,27 駆動部、26a,27a モータ、26b,27b ローラ、31 撮像部、32 撮像I/F、33 立体計測部、34 基本監視部、35 追加監視部、36 判定部、37メモリ、38 画像供給部、39 通信制御部、40 通信I/F、41 ライト制御部、42 撮像素子、43 設備の制御装置、101 トンネル、102 天井部分、103 道路面
【特許請求の範囲】
【請求項1】
数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラと、その複数の監視カメラに接続されたセンタ装置とからなる通行車両監視システムであって、
各監視カメラは、
複数の撮像部と、
少なくとも1つのスポットライトと、
前記スポットライトの照射位置を変更させる照射位置変更部と、
前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、
前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、
前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、
前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、
を有することを特徴とする通行車両監視システム。
【請求項2】
前記センタ装置からのコマンドを受信するコマンド受信処理部と、
前記センタ装置からのコマンドが前記スポットライトに危険点灯を指示するコマンドの場合、前記複数の監視カメラのうち、前記停止物体を検出した監視カメラ以外の監視カメラに、前記停止物体を検出した監視カメラと異なる処理を行わせるためのライト危険点灯信号を出力するライト危険点灯処理部とを有することを特徴とする請求項1に記載の通行車両監視システム。
【請求項3】
前記ライト制御部は、前記ライト危険点灯信号に基づいて、前記スポットライトを点滅、回転または回動させる処理を行わせることを特徴とする請求項2に記載の通行車両監視システム。
【請求項4】
複数の撮像部と、
少なくとも1つのスポットライトと、
前記スポットライトの照射位置を変更させる照射位置変更部と、
前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、
前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、
前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、
前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、
を有することを特徴とする車両用監視カメラ。
【請求項1】
数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラと、その複数の監視カメラに接続されたセンタ装置とからなる通行車両監視システムであって、
各監視カメラは、
複数の撮像部と、
少なくとも1つのスポットライトと、
前記スポットライトの照射位置を変更させる照射位置変更部と、
前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、
前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、
前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、
前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、
を有することを特徴とする通行車両監視システム。
【請求項2】
前記センタ装置からのコマンドを受信するコマンド受信処理部と、
前記センタ装置からのコマンドが前記スポットライトに危険点灯を指示するコマンドの場合、前記複数の監視カメラのうち、前記停止物体を検出した監視カメラ以外の監視カメラに、前記停止物体を検出した監視カメラと異なる処理を行わせるためのライト危険点灯信号を出力するライト危険点灯処理部とを有することを特徴とする請求項1に記載の通行車両監視システム。
【請求項3】
前記ライト制御部は、前記ライト危険点灯信号に基づいて、前記スポットライトを点滅、回転または回動させる処理を行わせることを特徴とする請求項2に記載の通行車両監視システム。
【請求項4】
複数の撮像部と、
少なくとも1つのスポットライトと、
前記スポットライトの照射位置を変更させる照射位置変更部と、
前記複数の撮像部において得られた複数の画像から距離画像のデータを生成する距離画像生成部と、
前記距離画像に基づいて、停止物体の検出を行う停止物体検出処理部と、
前記停止物体検出処理部で前記停止物体の検出が行われると、前記距離画像に基づいて、前記停止物体の位置を検出するとともに、前記停止物体に前記スポットライトの光を照射させるためのライト点灯信号を出力するライト点灯処理部と、
前記ライト点灯信号に基づいて、前記スポットライトの照射位置を前記停止物体の位置に変更させるように、前記照射位置変更部の制御を行うとともに、前記スポットライトを点灯させる制御を行うライト制御部と、
を有することを特徴とする車両用監視カメラ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−103921(P2012−103921A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−252248(P2010−252248)
【出願日】平成22年11月10日(2010.11.10)
【出願人】(304020498)サクサ株式会社 (678)
【出願人】(597173004)株式会社サイヴァース (7)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月10日(2010.11.10)
【出願人】(304020498)サクサ株式会社 (678)
【出願人】(597173004)株式会社サイヴァース (7)
【Fターム(参考)】
[ Back to top ]