
通過時刻推定装置、車速算出方法、及びプログラム
【課題】主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定する。
【解決手段】通過時刻特定部110は、進入側車軸検知用ひずみ計20が出力するひずみ値から、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻を特定する。次に、ひずみ値特定部113は、当該時刻に軸重算出用ひずみ計10が出力するひずみ値を特定する。そして、低相関時時刻推定部114は、ひずみ値特定部113が特定したひずみ値を用いて、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。
【解決手段】通過時刻特定部110は、進入側車軸検知用ひずみ計20が出力するひずみ値から、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻を特定する。次に、ひずみ値特定部113は、当該時刻に軸重算出用ひずみ計10が出力するひずみ値を特定する。そして、低相関時時刻推定部114は、ひずみ値特定部113が特定したひずみ値を用いて、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、橋梁の主桁の一端から当該主桁の他端へ走行する車両の速度を算出する通過時刻推定装置、車速算出方法、及びプログラムに関する。
【背景技術】
【0002】
橋梁を通過する大型車両の車軸重量は、橋梁の維持管理をする上で、橋梁の損傷を予測するために重要な情報となる。そこで、大型車両の軸重測定のため、橋梁の主桁に設置したひずみ計から車両通行時のひずみ値を連続測定し、軸重を算出するBridge Weigh−in−motionという手法が提案されている。また、特許文献1には、Bridge Weigh−in−motionによる車両の軸重測定に要する、車両の橋梁の主桁への進入時刻及び主桁からの退出時刻の算出方法が開示されている。
【0003】
特許文献1に記載の方法によると、2組の車両検知用センサが、主桁の車線に平行な方向に所定距離だけ離れて配置されており、2組の車両検知用センサの出力波形の相関関数が最大となるときの時間差で、車両検知用センサ間の距離を除算することで、車両の速度を算出する。次に、車両進行方向後方の車両検知用センサと主桁の一端との距離を算出した速度で乗算して得られた時間を、車両が当該車両検知用センサ上を通過した時刻から減算することで、車両の橋梁の主桁への進入時刻を算出する。同様に、車両進行方向前方の車両検知用センサと主桁の他端との距離を算出した速度で乗算して得られた時間を、車両が当該車両検知用センサ上を通過した時刻に加算することで、車両の橋梁の主桁からの退出時刻を算出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−084404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
2組の車両検知用センサの出力波形間で高い相関を得るには、車両が2つのひずみ計の間を等速で通過する必要がある。しかしながら、実際の交通状況では加減速の発生や他車両の通行等で発生する振動ノイズの影響などにより、必ずしも2組の車両検知用センサの出力波形間で高い相関を得られるとは限られない。そのため、特許文献1に記載の方法では、主桁への車両の進入・退出の時刻を特定することができず、当該データについて車軸重量を取得できないという問題がある。
また、Bridga Weigh−in−motionは、車重による主桁へのダメージの具合を測定することを目的としてなされるため、車軸重量の計測の抜けをできる限り少なくしたいという要望がある。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定装置であって、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部と、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部と、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率と、前記車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率とを記憶するひずみ率記憶部と、前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部と、前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部と、前記第1のひずみ値が、前記ひずみ率記憶部が記憶する一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部と、前記第1のひずみ値が、前記ひずみ率記憶部が記憶する他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部と、を備えることを特徴とする。
【0007】
また、本発明は、前記測定対象車両の車軸通過に対して独立してひずみが発生する第3の箇所のひずみ値である第3のひずみ値を時系列に取得する第3のひずみ値取得部と、前記第2のひずみ値取得部が取得した第2のひずみ値のうち、所定の閾値以上の極大値を示すピーク値を特定し、当該ピーク値の前後所定の範囲の第2のひずみ値を抽出するピーク値抽出部と、前記ピーク値抽出部が抽出した第2のひずみ値と前記第3のひずみ値との間の相関度が最大となる時間差を算出する時間差算出部と、前記時間差算出部が算出した時間差における相関度が所定の閾値以上であるか否かを判定する相関度判定部と、前記相関度判定部が、前記相関度が所定の閾値以上であると判定した場合に、前記時間差算出部が算出した時間差で、前記第2の箇所と前記第3の箇所との間の距離を除算することで前記測定対象車両の速度を算出する車速算出部と、前記車速算出部が算出した速度と、前記主桁の一端と前記第2の箇所との距離とを乗算して得られる時間を、前記ピーク値抽出部が特定したピーク値を取得した時刻から減算して得られる時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する高相関時進入時刻推定部と、前記車速算出部が算出した速度と、前記主桁の他端と前記第2の箇所との距離とを乗算して得られる時間と、前記時間差算出部が算出した時間差とを、前記ピーク値抽出部が特定したピーク値を取得した時刻に加算して得られる時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する高相関時退出時刻推定部と、を備え、前記第2の箇所は、前記第1の箇所より前記主桁の一端側であり、前記第3の箇所は、前記第1の箇所より前記主桁の他端側であり、前記進入時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁進入時刻を推定し、前記退出時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁退出時刻を推定することを特徴とする。
【0008】
また、本発明において、前記第1の箇所は、前記主桁の車両進行方向の中央部分であり、前記一端側ひずみ率と前記他端側ひずみ率は同一の値を示し、端部ひずみ率として前記ひずみ率記憶部に記憶されることを特徴とする。
【0009】
また、本発明は、前記通過時刻特定部が特定した時刻より前記主桁の一端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ前の時刻から、前記通過時刻特定部が特定した時刻より前記主桁の他端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ後の時刻までの時間の間に前記第1のひずみ値取得部が取得したひずみ値を少なくとも抽出し、抽出したひずみ値を前記第1のひずみ値取得部が取得した時刻に関連付けて出力するひずみ値抽出部と、前記ひずみ値抽出部が出力した複数のひずみ値に対してノイズ除去処理を行うノイズ除去部とを備え、前記主桁進入時刻特定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する一端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定し、前記主桁退出時刻特定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する他端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定することを特徴とする。
【0010】
また、本発明は、測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定方法であって、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の部材のひずみ値である第1のひずみ値を時系列に取得する第1のステップと、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の部材のひずみ値である第2のひずみ値を時系列に取得する第2のステップと、前記第2のひずみ値が所定の閾値を超えた時刻を特定する第3のステップと、前記特定した時刻における前記第1のひずみ値を特定する第4のステップと、前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する第5のステップと、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する第6のステップとを備えることを特徴とする。
【0011】
また、本発明は、主桁の一端から当該主桁の他端へ走行する測定対象車両の速度を算出する通過時刻推定装置を、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部、前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部、前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部、前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部、前記第1のひずみ値が、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部、として機能させるためのプログラムである。
【発明の効果】
【0012】
本発明によれば、第2のひずみ計が出力するひずみ値から測定対象車両が第2のひずみ計の直上を通過した時刻を特定し、当該時刻に第1のひずみ計が出力するひずみ値から、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。これにより、2組の車両検知用センサの出力波形間の相関を用いずに、測定対象車両の速度を算出することができるため、主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態による通過時刻推定装置を含む橋梁通過車両監視システム1におけるひずみ計の設置例を示す図である。
【図2】本実施形態による橋梁通過車両監視システム1の構成を示す概略ブロック図である。
【図3】橋梁通過車両監視システム1による測定対象車両の車重算出動作を示すフローチャートである。
【図4】進入側車軸検知用ひずみ計20が出力したひずみ値と退出側車軸検知用ひずみ計30が出力したひずみ値との相関が低い場合における、主桁進入時刻、主桁退出時刻の推定方法を示す概略図である。
【図5】車重比較データ記憶部が記憶する基準軸重ひずみ波形の説明図である。
【図6】車速と車軸位置とを用いて車重を算出する方法の概略図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
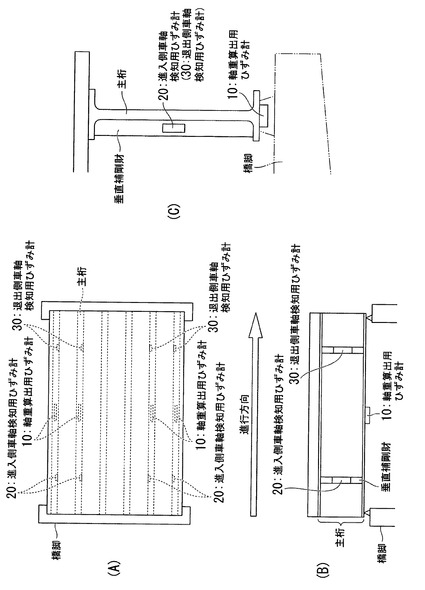
図1は、本発明の一実施形態による通過時刻推定装置を含む橋梁通過車両監視システム1におけるひずみ計の設置例を示す図である。ここでは、橋梁の主桁が6本ある場合の設置例を説明する。
本実施形態による橋梁通過車両監視システム1は、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30を備える。
【0015】
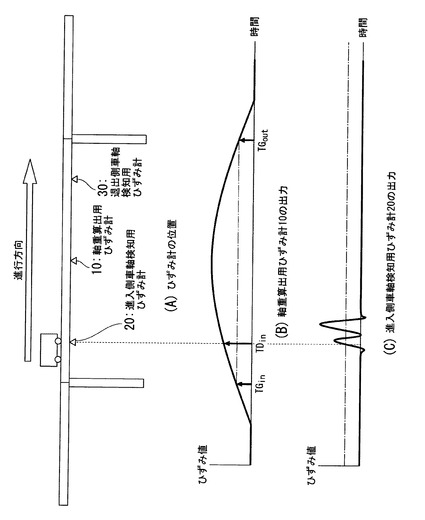
図1(A)は、橋梁の平面図である。図1(A)に示すように、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30は、それぞれ走行車線の通行状況を把握しやすいように設置される。
図1(B)は、橋梁の側面図である。また、図1(C)は、橋梁の断面図である。図1(B)、図1(C)に示すように、軸重算出用ひずみ計10は、主桁の下面、車両進行方向の中央部分(第1の箇所)に設置される。主桁の下面は、車軸の通過に対するひずみの応答時間が長く、車両が主桁上を通過する間、継続的にひずみが発生する。
また、進入側車軸検知用ひずみ計20は、主桁の、車両進行方向後方の垂直補剛材(第2の箇所)に設置される。また、退出側車軸検知用ひずみ計30は、主桁の、車両進行方向前方の垂直補剛材(第3の箇所)に設置される。主桁の垂直補剛財は、車軸の通過に対する応答時間が短く、車軸の通過に対して独立してひずみが発生する。
【0016】
そして、各ひずみ計は、設置された箇所の伸びひずみを計測する(なお、各ひずみ計は、ひずみ検出センサとなる膜状のシートと、このセンサの信号を増幅する増幅器等とを備える)。なお、ひずみとは物質の形状の変形であり、局所的には、計測箇所の伸び縮みの量になる。例えば、ある箇所のひずみが0.1であるとは、その箇所が0.9倍の長さになったこと、つまり10%の縮小が生じた状態である。よって、ひずみは比率であり、単位はない。
【0017】
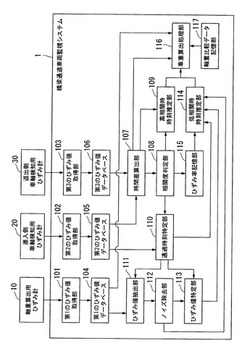
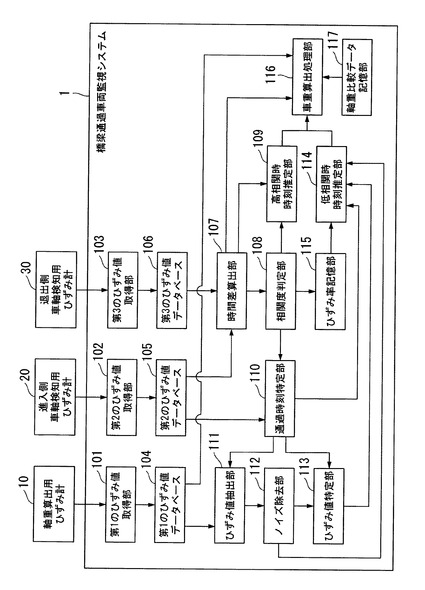
図2は、本実施形態による橋梁通過車両監視システム1の構成を示す概略ブロック図である。
橋梁通過車両監視システム1は、橋梁を通過する測定対象車両の車重を算出するシステムである。橋梁通過車両監視システム1は、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106、時間差算出部107(ピーク値抽出部)、相関度判定部108、高相関時時刻推定部109(車速推定部、高相関時進入時刻推定部、高相関時退出時刻推定部)、通過時刻特定部110、ひずみ値抽出部111、ノイズ除去部112、ひずみ値特定部113、低相関時時刻推定部114(進入時刻推定部、退出時刻推定部)、ひずみ率記憶部115、車重算出処理部116、軸重比較データ記憶部117を備える。
【0018】
第1のひずみ値取得部101は、軸重算出用ひずみ計10から時系列にひずみ値(第1のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第1のひずみ値データベース104に記録する。
第2のひずみ値取得部102は、進入側車軸検知用ひずみ計20から時系列にひずみ値(第2のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第2のひずみ値データベース105に記録する。
第3のひずみ値取得部103は、退出側車軸検知用ひずみ計30から時系列にひずみ値(第3のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第3のひずみ値データベース106に記録する。
第1のひずみ値データベース104は、第1のひずみ値取得部101が取得したひずみ値を、時刻に関連付けて記憶する。
第2のひずみ値データベース105は、第2のひずみ値取得部102が取得したひずみ値を、時刻に関連付けて記憶する。
第3のひずみ値データベース106は、第3のひずみ値取得部103が取得したひずみ値を、時刻に関連付けて記憶する。
【0019】
時間差算出部107は、第2のひずみ値データベース105が記憶する時系列のひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との間の相関度が最大となる時間差を算出する。
相関度判定部108は、時間差算出部107が算出した時間差における、第2のひずみ値データベース105が記憶する時系列のひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との間の相関度が所定の閾値以上であるか否かを判定する。
高相関時時刻推定部109は、相関度判定部108が、相関度が所定の閾値以上であると判定した場合に、時間差算出部107が算出した時間差で、進入側車軸検知用ひずみ計20の設置箇所と退出側車軸検知用ひずみ計30の設置箇所との間の距離を除算することで、測定対象車両の速度を算出する。また、高相関時時刻推定部109は、算出した速度、進入側車軸検知用ひずみ計20と主桁の進入側の端(一端)との距離、退出側車軸検知用ひずみ計30と主桁の退出側の端(他端)との距離、及び時間差算出部107が算出した時間差を用いて、主桁進入時刻、主桁退出時刻を算出する。
【0020】
通過時刻特定部110は、第2のひずみ値データベース105が記憶するひずみ値のうち、所定の閾値を超えるひずみ値に関連付けられた時刻を特定する。
ひずみ値抽出部111は、第1のひずみ値データベース104が記憶するひずみ値のうち、通過時刻特定部110が特定した時刻の前後の所定の時間の間の時刻に関連付けられたひずみ値と当該ひずみ値に関連付けられた時刻との組を抽出する。ここで、通過時刻特定部110が特定した時刻の前後の所定の時間とは、少なくとも測定対象車両が2つの橋脚の間を通過することが見込まれる時間である。そのため、通過時刻特定部110が特定した時刻の前後の所定の時間には、通過時刻特定部110が特定した時刻より主桁の進入側の端から進入側車軸検知用ひずみ計20までの距離に、所定の速度(例えば、20km/h)を乗じて得られる時間だけ前の時刻、及び通過時刻特定部110が特定した時刻より主桁の退出側の端から進入側車軸検知用ひずみ計20までの距離に、所定の速度を乗じて得られる時間だけ後の時刻が少なくとも含まれる。
ノイズ除去部112は、ひずみ値抽出部111が出力した複数のひずみ値に対してノイズ除去処理を行う。
【0021】
ひずみ値特定部113は、第1のひずみ値データベース104が記憶するひずみ値のうち、通過時刻特定部110が特定した時刻に関連付けられたひずみ値を特定する。
低相関時時刻推定部114は、ノイズ除去部112によってノイズ除去処理がなされた複数のひずみ値のうち、ひずみ率記憶部115が記憶する端部ひずみ率(一端側ひずみ率、他端側ひずみ率)をひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下の、ひずみ値を特定する。また、低相関時時刻推定部114は、当該特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻を主桁進入時刻として推定し、通過時刻特定部110が特定した時刻より後の直近の時刻を主桁退出時刻として推定する。なお、低相関時時刻推定部114は、相関度判定部108が、相関度が所定の閾値以下であると判定した場合に、主桁進入時刻及び主桁退出時刻を算出する。
ひずみ率記憶部115は、車両が主桁の進入側の端または退出側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す端部ひずみ率を記憶する。
【0022】
車重算出処理部116は、高相関時時刻推定部109または低相関時時刻推定部114が推定した主桁進入時刻及び主桁退出時刻と、軸重比較データ記憶部117が記憶する基準軸重ひずみ波形とに基づいて、当該測定対象車両の車重を算出する。
軸重比較データ記憶部117は、1tの車軸が主桁上を通過した場合に軸重算出用ひずみ計10が計測する時系列のひずみ値を、基準軸重ひずみ波形として記憶する。
【0023】
なお、本実施形態では、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106、時間差算出部107、相関度判定部108、高相関時時刻推定部109、通過時刻特定部110、ひずみ値抽出部111、ノイズ除去部112、ひずみ値特定部113、低相関時時刻推定部114、ひずみ率記憶部115が、本発明による通過時刻推定装置として動作する。
【0024】
そして、橋梁通過車両監視システム1は、上記構成を備えることで、以下に示す処理を実行する。
第1のひずみ値取得部101は、測定対象車両が主桁上を通過する間、継続的にひずみが発生する主桁の下面のひずみ値を時系列に取得し、第2のひずみ値取得部102は、測定対象車両の車軸通過に対して独立してひずみが発生する主桁の垂直補剛材のひずみ値を時系列に取得する。次に、通過時刻特定部110は、垂直補剛材のひずみ値が所定の閾値を超えた時刻を特定し、ひずみ値特定部113は、特定した時刻における主桁の下面のひずみ値を特定する。
【0025】
次に、低相関時時刻推定部114は、主桁の下面のひずみ値が、ひずみ率記憶部115が記憶する端部ひずみ率を、ひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下となった時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻を、測定対象車両が主桁の進入側の端に進入した時刻を示す主桁進入時刻として推定する。また、低相関時時刻推定部114は、主桁の下面のひずみ値が、ひずみ率記憶部115が記憶する端部ひずみ率を、ひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下となった時刻のうち、通過時刻特定部110が特定した時刻より後の直近の時刻を、測定対象車両が主桁の退出側の端から退出した時刻を示す主桁退出時刻として推定する。
これにより、橋梁通過車両監視システム1は、主桁の通過中に測定対象車両が加減速した場合にも、精度良く測定対象車両の速度を測定する。
【0026】
次に、橋梁通過車両監視システム1による測定対象車両の車重算出動作を説明する。
図3は、橋梁通過車両監視システム1による測定対象車両の車重算出動作を示すフローチャートである。
なお、測定対象車両は、車重算出動作を実行する前に、既に橋梁を通過しており、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106には、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103により、既にひずみ値と時刻とを関連付けたデータが格納されているものとする。
【0027】
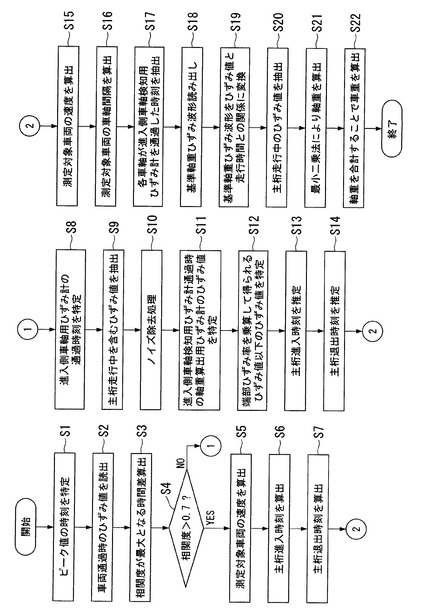
まず、橋梁通過車両監視システム1が車重算出動作を開始すると、時間差算出部107は、第2のひずみ値データベース105が記憶する時系列のひずみ値の中から、所定の閾値以上(例えば、1tの車軸に相当するひずみ値)の極大値であるピーク値に関連付けられた時刻を特定する(ステップS1)。次に、時間差算出部107は、当該特定した時刻の0.5秒前から、当該時刻の1秒後までの時刻に関連付けられたひずみ値を第2のひずみ値データベース105から読み出す。これにより、時間差算出部107は、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した際に、進入側車軸検知用ひずみ計20が出力したひずみ値を読み出す(ステップS2)。
【0028】
次に、時間差算出部107は、当該読み出したひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との相関度が最大となる時間差を算出する(ステップS3)。具体的には、時間差算出部107は、以下の式(1)が示す相関関数の解が最大となる時間差τを算出する。
【0029】
【数1】

【0030】
但し、g2(t)は、時間差算出部107がステップS2で読み出した複数のひずみ値のうち、時刻tに関連付けられたひずみ値を示し、g3(t)は、第3のひずみ値データベース106が記憶するひずみ値のうち、時刻tに関連付けられたひずみ値を示す。時間差τは、測定対象車両が主桁上を通過する際に要すると仮定される時間によって決定する。例えば、測定対象車両が主桁上を通過する際に要する時間が10秒以下であるものと仮定した場合、時間差τを0秒以上10秒以下とすると良い。
【0031】
次に、相関度判定部108は、時間差算出部107が算出した時間差τにおける相関関数の解の値が、所定の閾値(例えば、0.7)以上であるか否かを判定する(ステップS4)。相関度判定部108が、相関関数の解の値が所定の閾値以上であると判定した場合(ステップS4:YES)、高相関時時刻推定部109は、時刻tにおいて進入側車軸検知用ひずみ計20が出力したひずみ値と、時刻t−τにおいて退出側車軸検知用ひずみ計30が出力したひずみ値とが、いずれも測定対象車両の通過によるものであると判定する。次に、高相関時時刻推定部109は、進入側車軸検知用ひずみ計20の設置位置と退出側車軸検知用ひずみ計30の設置位置との距離を、時間差τで除算することで、測定対象車両の速度を算出する(ステップS5)。
【0032】
次に、高相関時時刻推定部109は、算出した速度を、主桁の進入側の端(一端)から進入側車軸検知用ひずみ計20までの距離に乗算することで、測定対象車両が主桁の進入側の端から進入側車軸検知用ひずみ計20の直上まで移動する際にかかった時間を算出する。次に、高相関時時刻推定部109は、算出した時間を、ステップS1で特定した時刻から減算することで、測定対象車両が主桁の進入側の端に進入した時刻を示す主桁進入時刻を推定する(ステップS6)。
また、高相関時時刻推定部109は、算出した速度を、主桁の退出側の端(他端)から退出側車軸検知用ひずみ計30までの距離に乗算することで、測定対象車両が主桁の退出側の端から退出側車軸検知用ひずみ計30の直上まで移動する際にかかった時間を算出する。次に、高相関時時刻推定部109は、算出した時間と、ステップS3で算出した時間差とを、ステップS1で特定した時刻に加算することで、測定対象車両が主桁の退出側の端から退出した時刻を示す主桁退出時刻を推定する(ステップS7)。
【0033】
ステップS4で、相関度判定部108が、相関関数の解の値が所定の閾値以上であると判定した場合(ステップS4:NO)、時刻tにおいて進入側車軸検知用ひずみ計20が出力したひずみ値と、時刻t−τにおいて退出側車軸検知用ひずみ計30が出力したひずみ値とが、両方とも測定対象車両の通過によるものである可能性が低い。これは、測定対象車両が主桁の通過中に測定対象車両が加減速したなどの理由によるものである。そのため、上記ステップS5〜ステップS7による処理を実行した場合、時刻の推定を誤る惧れがある。そこで、以下に示す処理を行うことで、精度良く時刻の推定を行う。
【0034】
図4は、進入側車軸検知用ひずみ計20が出力したひずみ値と退出側車軸検知用ひずみ計30が出力したひずみ値との相関が低い場合における、主桁進入時刻、主桁退出時刻の推定方法を示す概略図である。
まず、通過時刻特定部110は、図4(C)に示すように、第2のひずみ値データベース105が記憶するひずみ値のうち、所定の閾値(例えば、1tの車軸に相当するひずみ値)を超えるひずみ値に関連付けられた時刻を、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻と特定する(ステップS8)。次に、ひずみ値抽出部111は、第1のひずみ値データベース104から、通過時刻特定部110が特定した時刻の5秒前から10秒後までの時刻に関連付けられたひずみ値を抽出する(ステップS9)。これにより、ひずみ値抽出部111は、図4(B)に示すような、測定対象車両が少なくとも主桁を走行している間のひずみ値を含むひずみ値を抽出する。
【0035】
次に、ノイズ除去部112は、ひずみ値抽出部111が抽出したひずみ値に対してノイズ除去処理を行う(ステップS10)。なお、ノイズ除去処理の手法としては、抽出した複数のひずみ値に対してローパスフィルタ処理を行う手法、抽出した複数のひずみ値に対して移動平均値を算出する手法などが挙げられる。
次に、ひずみ値特定部113は、ノイズ除去部112が出力した複数のひずみ値のうち、通過時刻特定部110が特定した時刻(図4(B)のTDin)に関連付けられたひずみ値を特定する(ステップS11)。つまり、ひずみ値特定部113は、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻に、軸重算出用ひずみ計10が出力したひずみ値を特定する。
【0036】
次に、低相関時時刻推定部114は、ノイズ除去部112によってノイズ除去処理がなされた複数のひずみ値のうち、ひずみ値特定部113が特定したひずみ値に、ひずみ率記憶部115が記憶する端部ひずみ率(例えば、50%)を乗算して得られるひずみ値以下のひずみ値を特定する(ステップS12)。次に、低相関時時刻推定部114は、特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻(図4(B)のTGin)を主桁進入時刻として推定する(ステップS13)。また、低相関時時刻推定部114は、ステップS12で特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より後の直近の時刻(図4(B)のTGout)を主桁退出時刻として推定する(ステップS14)。
上記ステップS8〜ステップS14の処理により、主桁の通過中に測定対象車両が加減速した場合にも、測定対象車両の主桁への進入時刻・主桁からの退出時刻を精度良く推定することができる。
【0037】
次に、車重算出処理部116は、主桁の車両進行方向の長さを、高相関時時刻推定部109または低相関時時刻推定部114が特定した主桁進入時刻から主桁退出時刻までの時間で除算することで測定対象車両の速度を算出する(ステップS15)。なお、ステップS5で既に測定対象車両の速度を算出している場合は、ステップS15で速度の算出を行わなくても良い。次に、重量算出処理部は、時間差算出部107がステップS2で第2のひずみ値データベース105から読み出したひずみ値から、所定の閾値を超える極大値であるピーク値に関連付けられた時刻を、車軸が進入側車軸検知用ひずみ計20の直上を通過した時刻として、複数抽出する(ステップS16)。次に、重量算出処理部は、抽出した時刻の間隔にステップS15で算出した速度を乗算することで、車軸間隔を算出する(ステップS17)。
【0038】
次に、車重算出処理部116は、軸重比較データ記憶部117から基準軸重ひずみ波形を読み出す(ステップS18)。なお、基準軸重ひずみ波形とは、予め軸重が分かっている軸面が主桁上を通過した際の軸重算出用ひずみ計10の出力から、1tの車両が通過したときのひずみ値として求めておいたものであり、主桁の進入側の端から車両が進んだ際の距離とひずみ値との関係を示す。
【0039】
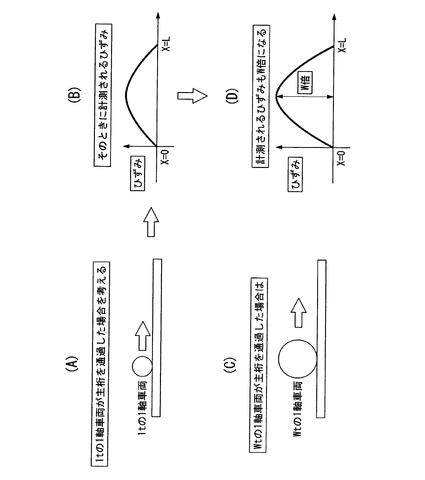
図5は、車重比較データ記憶部が記憶する基準軸重ひずみ波形の説明図である。
図5(A)に示すように、1tの車両が主軸を通過したときに計測されるひずみを考えると、図5(B)に示すようなひずみ波形となる。そして、図5(C)に示すようにWtの1軸車両が主軸を通過した場合、図5(D)に示すように、計測されるひずみは1tの車両が主軸を通過したときに計測されるひずみのW倍となる。
つまり、例えば、4tの車両が通過したときに軸重算出用ひずみ計10が出力するひずみ値を取得した場合、当該ひずみ値の4分の1を算出することで、基準軸重ひずみ波形を求めることができる。
【0040】
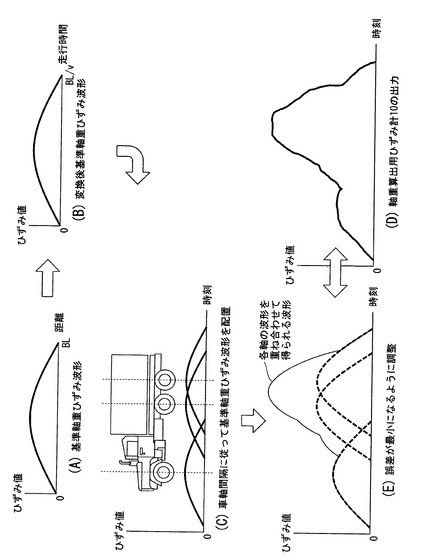
図6は、車速と車軸位置とを用いて車重を算出する方法の概略図である。
次に、車重算出処理部116は、ステップS15で算出した測定対象車両の速度を用いて、図6(A)に示すステップS18で読み出した基準軸重ひずみ波形を、図6(B)に示すように、ひずみ値と走行時間との関係に変換する(ステップS19)。つまり、基準軸重ひずみ波形のひずみ値に関連付けられた距離を速度で除算することで、走行時間に変換する。
【0041】
次に、車重算出処理部116は、図6(D)に示すように、第1のひずみ値データベース104から、高相関時時刻推定部109または低相関時時刻推定部114が特定した主桁進入時刻から主桁退出時刻までの時刻に関連付けられたひずみ値を抽出する(ステップS20)。次に、軸重算出処理部は、ステップS17で算出した車軸間隔に従って、図6(C)に示すように、ステップS19で変換した基準軸重ひずみ波形を時間軸上に配置する。そして、図6(E)に示すように、当該生成した波形とステップS20で第1のひずみ値データベース104から抽出したひずみ値との誤差が最小となるように、最小二乗法により各軸の軸重を算出し、各軸の重量を求める(ステップS21)。そして、軸重算出処理部は、求めた各軸の重量を合計することにより、車重を算出する(ステップS22)。
【0042】
このように、本実施形態によれば、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関が低い場合、まず、進入側車軸検知用ひずみ計20が出力するひずみ値から、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻を特定する。そして、当該時刻に軸重算出用ひずみ計10が出力するひずみ値を用いて、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。これにより、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関を用いずに、橋梁の部材によって車両の通過によるひずみ応答が異なるという自然法則を用いて、測定対象車両の速度を算出することができる。そのため、主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定することができる。
【0043】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関が低い場合にのみ、上記ステップS8〜ステップS14の処理による主桁進入時刻及び主桁退出時刻の推定を行ったが、これに限られない。例えば、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関度に関わらず、ステップS8〜ステップS14の処理によって主桁進入時刻及び主桁退出時刻の推定を行っても良い。
【0044】
また、本実施形態では、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻における軸重算出用ひずみ計10が出力するひずみ値を用いて、主桁進入時刻及び主桁退出時刻を推定する場合を説明したが、これに限られない。例えば、測定対象車両が退出側車軸検知用ひずみ計30の直上を通過した時刻における軸重算出用ひずみ計10が出力するひずみ値を用いて、主桁進入時刻及び主桁退出時刻を推定しても良い。
【0045】
また、本実施形態では、進入側車軸検知用ひずみ計20及び退出側車軸検知用ひずみ計30が、主軸の垂直補剛材に設置されている場合を説明したが、これに限られない。例えば、進入側車軸検知用ひずみ計20及び退出側車軸検知用ひずみ計30が、橋梁の床板や、端対傾構など、測定対象車両の車軸通過に対して独立してひずみが発生する他の部分に設置されていても良い。
また、本実施形態では、軸重算出用ひずみ計10が、主軸の底面に設置されている場合を説明したが、これに限られず、測定対象車両が主桁上を通過する間、継続的にひずみが発生する他の部材に設置されていても良い。
【0046】
また、本実施形態では、軸重算出用ひずみ計10が、主桁の車両進行方向の中央部分に設置されている場合を説明したが、これに限られず、中央からずれた位置に設置されていても良い。但し、この場合、ひずみ率記憶部115は、端部ひずみ率に代えて、車両が主桁の進入側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す一端側ひずみ率と、車両が主桁の退出側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す他端側ひずみ率とをそれぞれ記憶しておく必要がある。また、低相関時時刻推定部114は、一端側ひずみ率と他端側ひずみ率を用いて、主桁進入時刻及び主桁退出時刻を推定することとなる。
【0047】
また、本実施形態では、ある車線における車両の主桁進入時刻及び主桁退出時刻を推定する場合を説明したが、これに限られず、複数車線に亘って車両が存在する場合や、1車線に複数の車両が存在する場合にも、主桁進入時刻及び主桁退出時刻を推定することができる。この場合は、図1(A)に示すように、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30の組のそれぞれからひずみ値を取得し、それぞれのひずみ値を用いて連立方程式を解くことで、上記実施形態と同様に主桁進入時刻及び主桁退出時刻を推定することとなる。
【0048】
上述の橋梁通過車両監視システム1(通過時刻推定装置)は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0049】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0050】
なお、本実施形態では、上述したように橋梁通過車両監視システムがプログラムを実行することで上記処理を行う場合を説明したが、これに限られず、人間が軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30の出力結果を用いて、手計算によって処理を行っても良い。
【符号の説明】
【0051】
1…橋梁通過車両監視システム 10…軸重算出用ひずみ計 20…進入側車軸検知用ひずみ計 30…退出側車軸検知用ひずみ計 101…第1のひずみ値取得部 102…第2のひずみ値取得部 103…第3のひずみ値取得部 104…第1のひずみ値データベース 105…第2のひずみ値データベース 106…第3のひずみ値データベース 107…時間差算出部 108…相関度判定部 109…高相関時時刻推定部 110…通過時刻特定部 111…ひずみ値抽出部 112…ノイズ除去部 113…ひずみ値特定部 114…低相関時時刻推定部 115…ひずみ率記憶部 116…車重算出処理部 117…軸重比較データ記憶部
【技術分野】
【0001】
本発明は、橋梁の主桁の一端から当該主桁の他端へ走行する車両の速度を算出する通過時刻推定装置、車速算出方法、及びプログラムに関する。
【背景技術】
【0002】
橋梁を通過する大型車両の車軸重量は、橋梁の維持管理をする上で、橋梁の損傷を予測するために重要な情報となる。そこで、大型車両の軸重測定のため、橋梁の主桁に設置したひずみ計から車両通行時のひずみ値を連続測定し、軸重を算出するBridge Weigh−in−motionという手法が提案されている。また、特許文献1には、Bridge Weigh−in−motionによる車両の軸重測定に要する、車両の橋梁の主桁への進入時刻及び主桁からの退出時刻の算出方法が開示されている。
【0003】
特許文献1に記載の方法によると、2組の車両検知用センサが、主桁の車線に平行な方向に所定距離だけ離れて配置されており、2組の車両検知用センサの出力波形の相関関数が最大となるときの時間差で、車両検知用センサ間の距離を除算することで、車両の速度を算出する。次に、車両進行方向後方の車両検知用センサと主桁の一端との距離を算出した速度で乗算して得られた時間を、車両が当該車両検知用センサ上を通過した時刻から減算することで、車両の橋梁の主桁への進入時刻を算出する。同様に、車両進行方向前方の車両検知用センサと主桁の他端との距離を算出した速度で乗算して得られた時間を、車両が当該車両検知用センサ上を通過した時刻に加算することで、車両の橋梁の主桁からの退出時刻を算出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−084404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
2組の車両検知用センサの出力波形間で高い相関を得るには、車両が2つのひずみ計の間を等速で通過する必要がある。しかしながら、実際の交通状況では加減速の発生や他車両の通行等で発生する振動ノイズの影響などにより、必ずしも2組の車両検知用センサの出力波形間で高い相関を得られるとは限られない。そのため、特許文献1に記載の方法では、主桁への車両の進入・退出の時刻を特定することができず、当該データについて車軸重量を取得できないという問題がある。
また、Bridga Weigh−in−motionは、車重による主桁へのダメージの具合を測定することを目的としてなされるため、車軸重量の計測の抜けをできる限り少なくしたいという要望がある。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定装置であって、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部と、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部と、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率と、前記車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率とを記憶するひずみ率記憶部と、前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部と、前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部と、前記第1のひずみ値が、前記ひずみ率記憶部が記憶する一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部と、前記第1のひずみ値が、前記ひずみ率記憶部が記憶する他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部と、を備えることを特徴とする。
【0007】
また、本発明は、前記測定対象車両の車軸通過に対して独立してひずみが発生する第3の箇所のひずみ値である第3のひずみ値を時系列に取得する第3のひずみ値取得部と、前記第2のひずみ値取得部が取得した第2のひずみ値のうち、所定の閾値以上の極大値を示すピーク値を特定し、当該ピーク値の前後所定の範囲の第2のひずみ値を抽出するピーク値抽出部と、前記ピーク値抽出部が抽出した第2のひずみ値と前記第3のひずみ値との間の相関度が最大となる時間差を算出する時間差算出部と、前記時間差算出部が算出した時間差における相関度が所定の閾値以上であるか否かを判定する相関度判定部と、前記相関度判定部が、前記相関度が所定の閾値以上であると判定した場合に、前記時間差算出部が算出した時間差で、前記第2の箇所と前記第3の箇所との間の距離を除算することで前記測定対象車両の速度を算出する車速算出部と、前記車速算出部が算出した速度と、前記主桁の一端と前記第2の箇所との距離とを乗算して得られる時間を、前記ピーク値抽出部が特定したピーク値を取得した時刻から減算して得られる時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する高相関時進入時刻推定部と、前記車速算出部が算出した速度と、前記主桁の他端と前記第2の箇所との距離とを乗算して得られる時間と、前記時間差算出部が算出した時間差とを、前記ピーク値抽出部が特定したピーク値を取得した時刻に加算して得られる時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する高相関時退出時刻推定部と、を備え、前記第2の箇所は、前記第1の箇所より前記主桁の一端側であり、前記第3の箇所は、前記第1の箇所より前記主桁の他端側であり、前記進入時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁進入時刻を推定し、前記退出時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁退出時刻を推定することを特徴とする。
【0008】
また、本発明において、前記第1の箇所は、前記主桁の車両進行方向の中央部分であり、前記一端側ひずみ率と前記他端側ひずみ率は同一の値を示し、端部ひずみ率として前記ひずみ率記憶部に記憶されることを特徴とする。
【0009】
また、本発明は、前記通過時刻特定部が特定した時刻より前記主桁の一端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ前の時刻から、前記通過時刻特定部が特定した時刻より前記主桁の他端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ後の時刻までの時間の間に前記第1のひずみ値取得部が取得したひずみ値を少なくとも抽出し、抽出したひずみ値を前記第1のひずみ値取得部が取得した時刻に関連付けて出力するひずみ値抽出部と、前記ひずみ値抽出部が出力した複数のひずみ値に対してノイズ除去処理を行うノイズ除去部とを備え、前記主桁進入時刻特定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する一端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定し、前記主桁退出時刻特定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する他端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定することを特徴とする。
【0010】
また、本発明は、測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定方法であって、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の部材のひずみ値である第1のひずみ値を時系列に取得する第1のステップと、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の部材のひずみ値である第2のひずみ値を時系列に取得する第2のステップと、前記第2のひずみ値が所定の閾値を超えた時刻を特定する第3のステップと、前記特定した時刻における前記第1のひずみ値を特定する第4のステップと、前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する第5のステップと、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する第6のステップとを備えることを特徴とする。
【0011】
また、本発明は、主桁の一端から当該主桁の他端へ走行する測定対象車両の速度を算出する通過時刻推定装置を、前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部、前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部、前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部、前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部、前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部、前記第1のひずみ値が、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部、として機能させるためのプログラムである。
【発明の効果】
【0012】
本発明によれば、第2のひずみ計が出力するひずみ値から測定対象車両が第2のひずみ計の直上を通過した時刻を特定し、当該時刻に第1のひずみ計が出力するひずみ値から、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。これにより、2組の車両検知用センサの出力波形間の相関を用いずに、測定対象車両の速度を算出することができるため、主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態による通過時刻推定装置を含む橋梁通過車両監視システム1におけるひずみ計の設置例を示す図である。
【図2】本実施形態による橋梁通過車両監視システム1の構成を示す概略ブロック図である。
【図3】橋梁通過車両監視システム1による測定対象車両の車重算出動作を示すフローチャートである。
【図4】進入側車軸検知用ひずみ計20が出力したひずみ値と退出側車軸検知用ひずみ計30が出力したひずみ値との相関が低い場合における、主桁進入時刻、主桁退出時刻の推定方法を示す概略図である。
【図5】車重比較データ記憶部が記憶する基準軸重ひずみ波形の説明図である。
【図6】車速と車軸位置とを用いて車重を算出する方法の概略図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
図1は、本発明の一実施形態による通過時刻推定装置を含む橋梁通過車両監視システム1におけるひずみ計の設置例を示す図である。ここでは、橋梁の主桁が6本ある場合の設置例を説明する。
本実施形態による橋梁通過車両監視システム1は、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30を備える。
【0015】
図1(A)は、橋梁の平面図である。図1(A)に示すように、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30は、それぞれ走行車線の通行状況を把握しやすいように設置される。
図1(B)は、橋梁の側面図である。また、図1(C)は、橋梁の断面図である。図1(B)、図1(C)に示すように、軸重算出用ひずみ計10は、主桁の下面、車両進行方向の中央部分(第1の箇所)に設置される。主桁の下面は、車軸の通過に対するひずみの応答時間が長く、車両が主桁上を通過する間、継続的にひずみが発生する。
また、進入側車軸検知用ひずみ計20は、主桁の、車両進行方向後方の垂直補剛材(第2の箇所)に設置される。また、退出側車軸検知用ひずみ計30は、主桁の、車両進行方向前方の垂直補剛材(第3の箇所)に設置される。主桁の垂直補剛財は、車軸の通過に対する応答時間が短く、車軸の通過に対して独立してひずみが発生する。
【0016】
そして、各ひずみ計は、設置された箇所の伸びひずみを計測する(なお、各ひずみ計は、ひずみ検出センサとなる膜状のシートと、このセンサの信号を増幅する増幅器等とを備える)。なお、ひずみとは物質の形状の変形であり、局所的には、計測箇所の伸び縮みの量になる。例えば、ある箇所のひずみが0.1であるとは、その箇所が0.9倍の長さになったこと、つまり10%の縮小が生じた状態である。よって、ひずみは比率であり、単位はない。
【0017】
図2は、本実施形態による橋梁通過車両監視システム1の構成を示す概略ブロック図である。
橋梁通過車両監視システム1は、橋梁を通過する測定対象車両の車重を算出するシステムである。橋梁通過車両監視システム1は、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106、時間差算出部107(ピーク値抽出部)、相関度判定部108、高相関時時刻推定部109(車速推定部、高相関時進入時刻推定部、高相関時退出時刻推定部)、通過時刻特定部110、ひずみ値抽出部111、ノイズ除去部112、ひずみ値特定部113、低相関時時刻推定部114(進入時刻推定部、退出時刻推定部)、ひずみ率記憶部115、車重算出処理部116、軸重比較データ記憶部117を備える。
【0018】
第1のひずみ値取得部101は、軸重算出用ひずみ計10から時系列にひずみ値(第1のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第1のひずみ値データベース104に記録する。
第2のひずみ値取得部102は、進入側車軸検知用ひずみ計20から時系列にひずみ値(第2のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第2のひずみ値データベース105に記録する。
第3のひずみ値取得部103は、退出側車軸検知用ひずみ計30から時系列にひずみ値(第3のひずみ値)を取得し、当該ひずみ値と、当該ひずみ値を取得した時刻とを関連付けて第3のひずみ値データベース106に記録する。
第1のひずみ値データベース104は、第1のひずみ値取得部101が取得したひずみ値を、時刻に関連付けて記憶する。
第2のひずみ値データベース105は、第2のひずみ値取得部102が取得したひずみ値を、時刻に関連付けて記憶する。
第3のひずみ値データベース106は、第3のひずみ値取得部103が取得したひずみ値を、時刻に関連付けて記憶する。
【0019】
時間差算出部107は、第2のひずみ値データベース105が記憶する時系列のひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との間の相関度が最大となる時間差を算出する。
相関度判定部108は、時間差算出部107が算出した時間差における、第2のひずみ値データベース105が記憶する時系列のひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との間の相関度が所定の閾値以上であるか否かを判定する。
高相関時時刻推定部109は、相関度判定部108が、相関度が所定の閾値以上であると判定した場合に、時間差算出部107が算出した時間差で、進入側車軸検知用ひずみ計20の設置箇所と退出側車軸検知用ひずみ計30の設置箇所との間の距離を除算することで、測定対象車両の速度を算出する。また、高相関時時刻推定部109は、算出した速度、進入側車軸検知用ひずみ計20と主桁の進入側の端(一端)との距離、退出側車軸検知用ひずみ計30と主桁の退出側の端(他端)との距離、及び時間差算出部107が算出した時間差を用いて、主桁進入時刻、主桁退出時刻を算出する。
【0020】
通過時刻特定部110は、第2のひずみ値データベース105が記憶するひずみ値のうち、所定の閾値を超えるひずみ値に関連付けられた時刻を特定する。
ひずみ値抽出部111は、第1のひずみ値データベース104が記憶するひずみ値のうち、通過時刻特定部110が特定した時刻の前後の所定の時間の間の時刻に関連付けられたひずみ値と当該ひずみ値に関連付けられた時刻との組を抽出する。ここで、通過時刻特定部110が特定した時刻の前後の所定の時間とは、少なくとも測定対象車両が2つの橋脚の間を通過することが見込まれる時間である。そのため、通過時刻特定部110が特定した時刻の前後の所定の時間には、通過時刻特定部110が特定した時刻より主桁の進入側の端から進入側車軸検知用ひずみ計20までの距離に、所定の速度(例えば、20km/h)を乗じて得られる時間だけ前の時刻、及び通過時刻特定部110が特定した時刻より主桁の退出側の端から進入側車軸検知用ひずみ計20までの距離に、所定の速度を乗じて得られる時間だけ後の時刻が少なくとも含まれる。
ノイズ除去部112は、ひずみ値抽出部111が出力した複数のひずみ値に対してノイズ除去処理を行う。
【0021】
ひずみ値特定部113は、第1のひずみ値データベース104が記憶するひずみ値のうち、通過時刻特定部110が特定した時刻に関連付けられたひずみ値を特定する。
低相関時時刻推定部114は、ノイズ除去部112によってノイズ除去処理がなされた複数のひずみ値のうち、ひずみ率記憶部115が記憶する端部ひずみ率(一端側ひずみ率、他端側ひずみ率)をひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下の、ひずみ値を特定する。また、低相関時時刻推定部114は、当該特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻を主桁進入時刻として推定し、通過時刻特定部110が特定した時刻より後の直近の時刻を主桁退出時刻として推定する。なお、低相関時時刻推定部114は、相関度判定部108が、相関度が所定の閾値以下であると判定した場合に、主桁進入時刻及び主桁退出時刻を算出する。
ひずみ率記憶部115は、車両が主桁の進入側の端または退出側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す端部ひずみ率を記憶する。
【0022】
車重算出処理部116は、高相関時時刻推定部109または低相関時時刻推定部114が推定した主桁進入時刻及び主桁退出時刻と、軸重比較データ記憶部117が記憶する基準軸重ひずみ波形とに基づいて、当該測定対象車両の車重を算出する。
軸重比較データ記憶部117は、1tの車軸が主桁上を通過した場合に軸重算出用ひずみ計10が計測する時系列のひずみ値を、基準軸重ひずみ波形として記憶する。
【0023】
なお、本実施形態では、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106、時間差算出部107、相関度判定部108、高相関時時刻推定部109、通過時刻特定部110、ひずみ値抽出部111、ノイズ除去部112、ひずみ値特定部113、低相関時時刻推定部114、ひずみ率記憶部115が、本発明による通過時刻推定装置として動作する。
【0024】
そして、橋梁通過車両監視システム1は、上記構成を備えることで、以下に示す処理を実行する。
第1のひずみ値取得部101は、測定対象車両が主桁上を通過する間、継続的にひずみが発生する主桁の下面のひずみ値を時系列に取得し、第2のひずみ値取得部102は、測定対象車両の車軸通過に対して独立してひずみが発生する主桁の垂直補剛材のひずみ値を時系列に取得する。次に、通過時刻特定部110は、垂直補剛材のひずみ値が所定の閾値を超えた時刻を特定し、ひずみ値特定部113は、特定した時刻における主桁の下面のひずみ値を特定する。
【0025】
次に、低相関時時刻推定部114は、主桁の下面のひずみ値が、ひずみ率記憶部115が記憶する端部ひずみ率を、ひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下となった時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻を、測定対象車両が主桁の進入側の端に進入した時刻を示す主桁進入時刻として推定する。また、低相関時時刻推定部114は、主桁の下面のひずみ値が、ひずみ率記憶部115が記憶する端部ひずみ率を、ひずみ値特定部113が特定したひずみ値に乗算して得られるひずみ値以下となった時刻のうち、通過時刻特定部110が特定した時刻より後の直近の時刻を、測定対象車両が主桁の退出側の端から退出した時刻を示す主桁退出時刻として推定する。
これにより、橋梁通過車両監視システム1は、主桁の通過中に測定対象車両が加減速した場合にも、精度良く測定対象車両の速度を測定する。
【0026】
次に、橋梁通過車両監視システム1による測定対象車両の車重算出動作を説明する。
図3は、橋梁通過車両監視システム1による測定対象車両の車重算出動作を示すフローチャートである。
なお、測定対象車両は、車重算出動作を実行する前に、既に橋梁を通過しており、第1のひずみ値データベース104、第2のひずみ値データベース105、第3のひずみ値データベース106には、第1のひずみ値取得部101、第2のひずみ値取得部102、第3のひずみ値取得部103により、既にひずみ値と時刻とを関連付けたデータが格納されているものとする。
【0027】
まず、橋梁通過車両監視システム1が車重算出動作を開始すると、時間差算出部107は、第2のひずみ値データベース105が記憶する時系列のひずみ値の中から、所定の閾値以上(例えば、1tの車軸に相当するひずみ値)の極大値であるピーク値に関連付けられた時刻を特定する(ステップS1)。次に、時間差算出部107は、当該特定した時刻の0.5秒前から、当該時刻の1秒後までの時刻に関連付けられたひずみ値を第2のひずみ値データベース105から読み出す。これにより、時間差算出部107は、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した際に、進入側車軸検知用ひずみ計20が出力したひずみ値を読み出す(ステップS2)。
【0028】
次に、時間差算出部107は、当該読み出したひずみ値と、第3のひずみ値データベース106が記憶する時系列のひずみ値との相関度が最大となる時間差を算出する(ステップS3)。具体的には、時間差算出部107は、以下の式(1)が示す相関関数の解が最大となる時間差τを算出する。
【0029】
【数1】
【0030】
但し、g2(t)は、時間差算出部107がステップS2で読み出した複数のひずみ値のうち、時刻tに関連付けられたひずみ値を示し、g3(t)は、第3のひずみ値データベース106が記憶するひずみ値のうち、時刻tに関連付けられたひずみ値を示す。時間差τは、測定対象車両が主桁上を通過する際に要すると仮定される時間によって決定する。例えば、測定対象車両が主桁上を通過する際に要する時間が10秒以下であるものと仮定した場合、時間差τを0秒以上10秒以下とすると良い。
【0031】
次に、相関度判定部108は、時間差算出部107が算出した時間差τにおける相関関数の解の値が、所定の閾値(例えば、0.7)以上であるか否かを判定する(ステップS4)。相関度判定部108が、相関関数の解の値が所定の閾値以上であると判定した場合(ステップS4:YES)、高相関時時刻推定部109は、時刻tにおいて進入側車軸検知用ひずみ計20が出力したひずみ値と、時刻t−τにおいて退出側車軸検知用ひずみ計30が出力したひずみ値とが、いずれも測定対象車両の通過によるものであると判定する。次に、高相関時時刻推定部109は、進入側車軸検知用ひずみ計20の設置位置と退出側車軸検知用ひずみ計30の設置位置との距離を、時間差τで除算することで、測定対象車両の速度を算出する(ステップS5)。
【0032】
次に、高相関時時刻推定部109は、算出した速度を、主桁の進入側の端(一端)から進入側車軸検知用ひずみ計20までの距離に乗算することで、測定対象車両が主桁の進入側の端から進入側車軸検知用ひずみ計20の直上まで移動する際にかかった時間を算出する。次に、高相関時時刻推定部109は、算出した時間を、ステップS1で特定した時刻から減算することで、測定対象車両が主桁の進入側の端に進入した時刻を示す主桁進入時刻を推定する(ステップS6)。
また、高相関時時刻推定部109は、算出した速度を、主桁の退出側の端(他端)から退出側車軸検知用ひずみ計30までの距離に乗算することで、測定対象車両が主桁の退出側の端から退出側車軸検知用ひずみ計30の直上まで移動する際にかかった時間を算出する。次に、高相関時時刻推定部109は、算出した時間と、ステップS3で算出した時間差とを、ステップS1で特定した時刻に加算することで、測定対象車両が主桁の退出側の端から退出した時刻を示す主桁退出時刻を推定する(ステップS7)。
【0033】
ステップS4で、相関度判定部108が、相関関数の解の値が所定の閾値以上であると判定した場合(ステップS4:NO)、時刻tにおいて進入側車軸検知用ひずみ計20が出力したひずみ値と、時刻t−τにおいて退出側車軸検知用ひずみ計30が出力したひずみ値とが、両方とも測定対象車両の通過によるものである可能性が低い。これは、測定対象車両が主桁の通過中に測定対象車両が加減速したなどの理由によるものである。そのため、上記ステップS5〜ステップS7による処理を実行した場合、時刻の推定を誤る惧れがある。そこで、以下に示す処理を行うことで、精度良く時刻の推定を行う。
【0034】
図4は、進入側車軸検知用ひずみ計20が出力したひずみ値と退出側車軸検知用ひずみ計30が出力したひずみ値との相関が低い場合における、主桁進入時刻、主桁退出時刻の推定方法を示す概略図である。
まず、通過時刻特定部110は、図4(C)に示すように、第2のひずみ値データベース105が記憶するひずみ値のうち、所定の閾値(例えば、1tの車軸に相当するひずみ値)を超えるひずみ値に関連付けられた時刻を、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻と特定する(ステップS8)。次に、ひずみ値抽出部111は、第1のひずみ値データベース104から、通過時刻特定部110が特定した時刻の5秒前から10秒後までの時刻に関連付けられたひずみ値を抽出する(ステップS9)。これにより、ひずみ値抽出部111は、図4(B)に示すような、測定対象車両が少なくとも主桁を走行している間のひずみ値を含むひずみ値を抽出する。
【0035】
次に、ノイズ除去部112は、ひずみ値抽出部111が抽出したひずみ値に対してノイズ除去処理を行う(ステップS10)。なお、ノイズ除去処理の手法としては、抽出した複数のひずみ値に対してローパスフィルタ処理を行う手法、抽出した複数のひずみ値に対して移動平均値を算出する手法などが挙げられる。
次に、ひずみ値特定部113は、ノイズ除去部112が出力した複数のひずみ値のうち、通過時刻特定部110が特定した時刻(図4(B)のTDin)に関連付けられたひずみ値を特定する(ステップS11)。つまり、ひずみ値特定部113は、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻に、軸重算出用ひずみ計10が出力したひずみ値を特定する。
【0036】
次に、低相関時時刻推定部114は、ノイズ除去部112によってノイズ除去処理がなされた複数のひずみ値のうち、ひずみ値特定部113が特定したひずみ値に、ひずみ率記憶部115が記憶する端部ひずみ率(例えば、50%)を乗算して得られるひずみ値以下のひずみ値を特定する(ステップS12)。次に、低相関時時刻推定部114は、特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より前の直近の時刻(図4(B)のTGin)を主桁進入時刻として推定する(ステップS13)。また、低相関時時刻推定部114は、ステップS12で特定したひずみ値に関連付けられた時刻のうち、通過時刻特定部110が特定した時刻より後の直近の時刻(図4(B)のTGout)を主桁退出時刻として推定する(ステップS14)。
上記ステップS8〜ステップS14の処理により、主桁の通過中に測定対象車両が加減速した場合にも、測定対象車両の主桁への進入時刻・主桁からの退出時刻を精度良く推定することができる。
【0037】
次に、車重算出処理部116は、主桁の車両進行方向の長さを、高相関時時刻推定部109または低相関時時刻推定部114が特定した主桁進入時刻から主桁退出時刻までの時間で除算することで測定対象車両の速度を算出する(ステップS15)。なお、ステップS5で既に測定対象車両の速度を算出している場合は、ステップS15で速度の算出を行わなくても良い。次に、重量算出処理部は、時間差算出部107がステップS2で第2のひずみ値データベース105から読み出したひずみ値から、所定の閾値を超える極大値であるピーク値に関連付けられた時刻を、車軸が進入側車軸検知用ひずみ計20の直上を通過した時刻として、複数抽出する(ステップS16)。次に、重量算出処理部は、抽出した時刻の間隔にステップS15で算出した速度を乗算することで、車軸間隔を算出する(ステップS17)。
【0038】
次に、車重算出処理部116は、軸重比較データ記憶部117から基準軸重ひずみ波形を読み出す(ステップS18)。なお、基準軸重ひずみ波形とは、予め軸重が分かっている軸面が主桁上を通過した際の軸重算出用ひずみ計10の出力から、1tの車両が通過したときのひずみ値として求めておいたものであり、主桁の進入側の端から車両が進んだ際の距離とひずみ値との関係を示す。
【0039】
図5は、車重比較データ記憶部が記憶する基準軸重ひずみ波形の説明図である。
図5(A)に示すように、1tの車両が主軸を通過したときに計測されるひずみを考えると、図5(B)に示すようなひずみ波形となる。そして、図5(C)に示すようにWtの1軸車両が主軸を通過した場合、図5(D)に示すように、計測されるひずみは1tの車両が主軸を通過したときに計測されるひずみのW倍となる。
つまり、例えば、4tの車両が通過したときに軸重算出用ひずみ計10が出力するひずみ値を取得した場合、当該ひずみ値の4分の1を算出することで、基準軸重ひずみ波形を求めることができる。
【0040】
図6は、車速と車軸位置とを用いて車重を算出する方法の概略図である。
次に、車重算出処理部116は、ステップS15で算出した測定対象車両の速度を用いて、図6(A)に示すステップS18で読み出した基準軸重ひずみ波形を、図6(B)に示すように、ひずみ値と走行時間との関係に変換する(ステップS19)。つまり、基準軸重ひずみ波形のひずみ値に関連付けられた距離を速度で除算することで、走行時間に変換する。
【0041】
次に、車重算出処理部116は、図6(D)に示すように、第1のひずみ値データベース104から、高相関時時刻推定部109または低相関時時刻推定部114が特定した主桁進入時刻から主桁退出時刻までの時刻に関連付けられたひずみ値を抽出する(ステップS20)。次に、軸重算出処理部は、ステップS17で算出した車軸間隔に従って、図6(C)に示すように、ステップS19で変換した基準軸重ひずみ波形を時間軸上に配置する。そして、図6(E)に示すように、当該生成した波形とステップS20で第1のひずみ値データベース104から抽出したひずみ値との誤差が最小となるように、最小二乗法により各軸の軸重を算出し、各軸の重量を求める(ステップS21)。そして、軸重算出処理部は、求めた各軸の重量を合計することにより、車重を算出する(ステップS22)。
【0042】
このように、本実施形態によれば、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関が低い場合、まず、進入側車軸検知用ひずみ計20が出力するひずみ値から、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻を特定する。そして、当該時刻に軸重算出用ひずみ計10が出力するひずみ値を用いて、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。これにより、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関を用いずに、橋梁の部材によって車両の通過によるひずみ応答が異なるという自然法則を用いて、測定対象車両の速度を算出することができる。そのため、主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定することができる。
【0043】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関が低い場合にのみ、上記ステップS8〜ステップS14の処理による主桁進入時刻及び主桁退出時刻の推定を行ったが、これに限られない。例えば、進入側車軸検知用ひずみ計20と退出側車軸検知用ひずみ計30の出力波形間の相関度に関わらず、ステップS8〜ステップS14の処理によって主桁進入時刻及び主桁退出時刻の推定を行っても良い。
【0044】
また、本実施形態では、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻における軸重算出用ひずみ計10が出力するひずみ値を用いて、主桁進入時刻及び主桁退出時刻を推定する場合を説明したが、これに限られない。例えば、測定対象車両が退出側車軸検知用ひずみ計30の直上を通過した時刻における軸重算出用ひずみ計10が出力するひずみ値を用いて、主桁進入時刻及び主桁退出時刻を推定しても良い。
【0045】
また、本実施形態では、進入側車軸検知用ひずみ計20及び退出側車軸検知用ひずみ計30が、主軸の垂直補剛材に設置されている場合を説明したが、これに限られない。例えば、進入側車軸検知用ひずみ計20及び退出側車軸検知用ひずみ計30が、橋梁の床板や、端対傾構など、測定対象車両の車軸通過に対して独立してひずみが発生する他の部分に設置されていても良い。
また、本実施形態では、軸重算出用ひずみ計10が、主軸の底面に設置されている場合を説明したが、これに限られず、測定対象車両が主桁上を通過する間、継続的にひずみが発生する他の部材に設置されていても良い。
【0046】
また、本実施形態では、軸重算出用ひずみ計10が、主桁の車両進行方向の中央部分に設置されている場合を説明したが、これに限られず、中央からずれた位置に設置されていても良い。但し、この場合、ひずみ率記憶部115は、端部ひずみ率に代えて、車両が主桁の進入側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す一端側ひずみ率と、車両が主桁の退出側の端に位置する場合に軸重算出用ひずみ計10が出力するひずみ値と、車両が進入側車軸検知用ひずみ計20の直上に位置する場合に軸重算出用ひずみ計10が出力するひずみ値との比率を示す他端側ひずみ率とをそれぞれ記憶しておく必要がある。また、低相関時時刻推定部114は、一端側ひずみ率と他端側ひずみ率を用いて、主桁進入時刻及び主桁退出時刻を推定することとなる。
【0047】
また、本実施形態では、ある車線における車両の主桁進入時刻及び主桁退出時刻を推定する場合を説明したが、これに限られず、複数車線に亘って車両が存在する場合や、1車線に複数の車両が存在する場合にも、主桁進入時刻及び主桁退出時刻を推定することができる。この場合は、図1(A)に示すように、軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30の組のそれぞれからひずみ値を取得し、それぞれのひずみ値を用いて連立方程式を解くことで、上記実施形態と同様に主桁進入時刻及び主桁退出時刻を推定することとなる。
【0048】
上述の橋梁通過車両監視システム1(通過時刻推定装置)は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0049】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0050】
なお、本実施形態では、上述したように橋梁通過車両監視システムがプログラムを実行することで上記処理を行う場合を説明したが、これに限られず、人間が軸重算出用ひずみ計10、進入側車軸検知用ひずみ計20、退出側車軸検知用ひずみ計30の出力結果を用いて、手計算によって処理を行っても良い。
【符号の説明】
【0051】
1…橋梁通過車両監視システム 10…軸重算出用ひずみ計 20…進入側車軸検知用ひずみ計 30…退出側車軸検知用ひずみ計 101…第1のひずみ値取得部 102…第2のひずみ値取得部 103…第3のひずみ値取得部 104…第1のひずみ値データベース 105…第2のひずみ値データベース 106…第3のひずみ値データベース 107…時間差算出部 108…相関度判定部 109…高相関時時刻推定部 110…通過時刻特定部 111…ひずみ値抽出部 112…ノイズ除去部 113…ひずみ値特定部 114…低相関時時刻推定部 115…ひずみ率記憶部 116…車重算出処理部 117…軸重比較データ記憶部
【特許請求の範囲】
【請求項1】
測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定装置であって、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部と、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部と、
車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率と、前記車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率とを記憶するひずみ率記憶部と、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部と、
前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部と、
前記第1のひずみ値が、前記ひずみ率記憶部が記憶する一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部と、
前記第1のひずみ値が、前記ひずみ率記憶部が記憶する他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部と、
を備えることを特徴とする通過時刻推定装置。
【請求項2】
前記測定対象車両の車軸通過に対して独立してひずみが発生する第3の箇所のひずみ値である第3のひずみ値を時系列に取得する第3のひずみ値取得部と、
前記第2のひずみ値取得部が取得した第2のひずみ値のうち、所定の閾値以上の極大値を示すピーク値を特定し、当該ピーク値の前後所定の範囲の第2のひずみ値を抽出するピーク値抽出部と、
前記ピーク値抽出部が抽出した第2のひずみ値と前記第3のひずみ値との間の相関度が最大となる時間差を算出する時間差算出部と、
前記時間差算出部が算出した時間差における相関度が所定の閾値以上であるか否かを判定する相関度判定部と、
前記相関度判定部が、前記相関度が所定の閾値以上であると判定した場合に、前記時間差算出部が算出した時間差で、前記第2の箇所と前記第3の箇所との間の距離を除算することで前記測定対象車両の速度を算出する車速算出部と、
前記車速算出部が算出した速度と、前記主桁の一端と前記第2の箇所との距離とを乗算して得られる時間を、前記ピーク値抽出部が特定したピーク値を取得した時刻から減算して得られる時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する高相関時進入時刻推定部と、
前記車速算出部が算出した速度と、前記主桁の他端と前記第2の箇所との距離とを乗算して得られる時間と、前記時間差算出部が算出した時間差とを、前記ピーク値抽出部が特定したピーク値を取得した時刻に加算して得られる時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する高相関時退出時刻推定部と、
を備え、
前記第2の箇所は、前記第1の箇所より前記主桁の一端側であり、
前記第3の箇所は、前記第1の箇所より前記主桁の他端側であり、
前記進入時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁進入時刻を推定し、
前記退出時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁退出時刻を推定する
ことを特徴とする請求項1に記載の通過時刻推定装置。
【請求項3】
前記第1の箇所は、前記主桁の車両進行方向の中央部分であり、
前記一端側ひずみ率と前記他端側ひずみ率は同一の値を示し、端部ひずみ率として前記ひずみ率記憶部に記憶される
ことを特徴とする請求項1または請求項2に記載の通過時刻推定装置。
【請求項4】
前記通過時刻特定部が特定した時刻より前記主桁の一端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ前の時刻から、前記通過時刻特定部が特定した時刻より前記主桁の他端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ後の時刻までの時間の間に前記第1のひずみ値取得部が取得したひずみ値を少なくとも抽出し、抽出したひずみ値を前記第1のひずみ値取得部が取得した時刻に関連付けて出力するひずみ値抽出部と、
前記ひずみ値抽出部が出力した複数のひずみ値に対してノイズ除去処理を行うノイズ除去部と
を備え、
前記進入時刻推定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する一端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定し、
前記退出時刻推定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する他端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定する
ことを特徴とする請求項1から請求項3の何れか1項に記載の通過時刻推定装置。
【請求項5】
測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定方法であって、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の部材のひずみ値である第1のひずみ値を時系列に取得する第1のステップと、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の部材のひずみ値である第2のひずみ値を時系列に取得する第2のステップと、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する第3のステップと、
前記特定した時刻における前記第1のひずみ値を特定する第4のステップと、
前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する第5のステップと、
前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する第6のステップと
を備えることを特徴とする車速算出方法。
【請求項6】
主桁の一端から当該主桁の他端へ走行する測定対象車両の速度を算出する通過時刻推定装置を、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部、
前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部、
前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部、
前記第1のひずみ値が、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部、
として機能させるためのプログラム。
【請求項1】
測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定装置であって、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部と、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部と、
車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率と、前記車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の箇所の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率とを記憶するひずみ率記憶部と、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部と、
前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部と、
前記第1のひずみ値が、前記ひずみ率記憶部が記憶する一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部と、
前記第1のひずみ値が、前記ひずみ率記憶部が記憶する他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部と、
を備えることを特徴とする通過時刻推定装置。
【請求項2】
前記測定対象車両の車軸通過に対して独立してひずみが発生する第3の箇所のひずみ値である第3のひずみ値を時系列に取得する第3のひずみ値取得部と、
前記第2のひずみ値取得部が取得した第2のひずみ値のうち、所定の閾値以上の極大値を示すピーク値を特定し、当該ピーク値の前後所定の範囲の第2のひずみ値を抽出するピーク値抽出部と、
前記ピーク値抽出部が抽出した第2のひずみ値と前記第3のひずみ値との間の相関度が最大となる時間差を算出する時間差算出部と、
前記時間差算出部が算出した時間差における相関度が所定の閾値以上であるか否かを判定する相関度判定部と、
前記相関度判定部が、前記相関度が所定の閾値以上であると判定した場合に、前記時間差算出部が算出した時間差で、前記第2の箇所と前記第3の箇所との間の距離を除算することで前記測定対象車両の速度を算出する車速算出部と、
前記車速算出部が算出した速度と、前記主桁の一端と前記第2の箇所との距離とを乗算して得られる時間を、前記ピーク値抽出部が特定したピーク値を取得した時刻から減算して得られる時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する高相関時進入時刻推定部と、
前記車速算出部が算出した速度と、前記主桁の他端と前記第2の箇所との距離とを乗算して得られる時間と、前記時間差算出部が算出した時間差とを、前記ピーク値抽出部が特定したピーク値を取得した時刻に加算して得られる時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する高相関時退出時刻推定部と、
を備え、
前記第2の箇所は、前記第1の箇所より前記主桁の一端側であり、
前記第3の箇所は、前記第1の箇所より前記主桁の他端側であり、
前記進入時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁進入時刻を推定し、
前記退出時刻推定部は、前記相関度判定部が、前記相関度が所定の閾値未満であると判定した場合に、前記主桁退出時刻を推定する
ことを特徴とする請求項1に記載の通過時刻推定装置。
【請求項3】
前記第1の箇所は、前記主桁の車両進行方向の中央部分であり、
前記一端側ひずみ率と前記他端側ひずみ率は同一の値を示し、端部ひずみ率として前記ひずみ率記憶部に記憶される
ことを特徴とする請求項1または請求項2に記載の通過時刻推定装置。
【請求項4】
前記通過時刻特定部が特定した時刻より前記主桁の一端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ前の時刻から、前記通過時刻特定部が特定した時刻より前記主桁の他端側から前記第2の箇所までの距離に所定の速度を乗じて得られる時間だけ後の時刻までの時間の間に前記第1のひずみ値取得部が取得したひずみ値を少なくとも抽出し、抽出したひずみ値を前記第1のひずみ値取得部が取得した時刻に関連付けて出力するひずみ値抽出部と、
前記ひずみ値抽出部が出力した複数のひずみ値に対してノイズ除去処理を行うノイズ除去部と
を備え、
前記進入時刻推定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する一端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定し、
前記退出時刻推定部は、前記ノイズ除去部によってノイズ除去処理がなされた複数のひずみ値のうち、前記ひずみ値特定部が特定したひずみ値に前記ひずみ率記憶部が記憶する他端側ひずみ率を乗算して得られるひずみ値以下のひずみ値を特定し、当該特定したひずみ値に関連付けられた時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として特定する
ことを特徴とする請求項1から請求項3の何れか1項に記載の通過時刻推定装置。
【請求項5】
測定対象車両が橋梁の主桁の一端に進入した時刻、及び前記測定対象車両が前記主桁の他端から退出する時刻を推定する通過時刻推定方法であって、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の部材のひずみ値である第1のひずみ値を時系列に取得する第1のステップと、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の部材のひずみ値である第2のひずみ値を時系列に取得する第2のステップと、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する第3のステップと、
前記特定した時刻における前記第1のひずみ値を特定する第4のステップと、
前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する第5のステップと、
前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記第3のステップで特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する第6のステップと
を備えることを特徴とする車速算出方法。
【請求項6】
主桁の一端から当該主桁の他端へ走行する測定対象車両の速度を算出する通過時刻推定装置を、
前記測定対象車両が前記主桁上を通過する間、継続的にひずみが発生する第1の箇所のひずみ値である第1のひずみ値を時系列に取得する第1のひずみ値取得部、
前記測定対象車両の車軸通過に対して独立してひずみが発生する第2の箇所のひずみ値である第2のひずみ値を時系列に取得する第2のひずみ値取得部、
前記第2のひずみ値が所定の閾値を超えた時刻を特定する通過時刻特定部、
前記特定した時刻における前記第1のひずみ値を特定するひずみ値特定部、
前記第1のひずみ値が、車両が前記主桁の一端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す一端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より前の直近の時刻を、前記測定対象車両が前記主桁の一端に進入した時刻を示す主桁進入時刻として推定する進入時刻推定部、
前記第1のひずみ値が、前記第1のひずみ値が、車両が前記主桁の他端に位置する場合における前記第1のひずみ値と前記車両が前記第2の部材の直上に位置する場合における前記第1のひずみ値との比率を示す他端側ひずみ率を前記特定した第1のひずみ値に乗算して得られるひずみ値以下となった時刻のうち、前記通過時刻特定部が特定した時刻より後の直近の時刻を、前記測定対象車両が前記主桁の他端から退出した時刻を示す主桁退出時刻として推定する退出時刻推定部、
として機能させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−48365(P2012−48365A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−188202(P2010−188202)
【出願日】平成22年8月25日(2010.8.25)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月25日(2010.8.25)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
[ Back to top ]