
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、速度検出装置及び方法に関するものであり、特に、自律航法手段により移動体の速度を高精度に検出することができる速度検出装置及び方法に関するものである。
【背景技術】
【0002】
例えば、車両に搭載されるナビゲーション装置は、GPS衛星からのGPS信号を受信し、その情報に基づいて車両の現在位置を算出し、算出した現在位置を、ナビゲーション装置に設けられた表示画面に表示されている地図上に重ねて表示させることにより、利用者に車両の現在位置を提示することができる。
【0003】
ところで、GPS信号のみを用いて算出された現在位置には、通常、10m前後の誤差が含まれるため、その現在位置をそのまま適用すると、正しい道路上に現在位置が表示されない恐れがある。また、車両がトンネル内や高層ビルの谷間を走行しているような場合には、GPS信号を受信できないため、現在位置の算出自体ができなくなってしまう。
【0004】
そこで、GPS信号から算出した現在位置を地図上の適切な位置にマッチングするマップマッチング処理や、車両から取得した車速や移動距離等の走行情報を用いて、GPS信号から算出した現在位置を補間する方法が提案されている。
【0005】
例えば、下記特許文献1(特開2010−19759号公報)には、GPS信号を用いて現在位置を算出する他律航法手段と、車速センサ及びジャイロスコープから取得した車両の走行情報を用いて現在位置を算出する自律航法手段とを備え、他律航法手段による現在位置の算出精度が低下していると判定された場合、自律航法手段に切り替えて車両の現在位置を算出するように構成した「走行車線検出装置」が開示されている。
【0006】
一方、ナビゲーション装置には、車両に固定的に設置されるのではなく、必要に応じて車両から取り外して携帯し、例えば、歩行経路を利用者に案内する用途に利用可能なポータブル型のナビゲーション装置(PND:Portable Navigation Device)がある。この場合、PNDを車両に搭載し、特許文献1に開示された自律航法手段を用いて現在位置を高精度に検出しようとすると、車両側の車速センサとナビゲーション装置とを接続する作業が必要になる。このような作業は、非常に煩わしく、また、車両によっては、PNDとの接続に対応していないものもあるため、近年のPNDは、車両の走行情報、例えば、車速をPND単体で検出可能とした自己完結型の自律航法手段を備えるものが主流になりつつある。
【0007】
ここで、車速の検出に用いられる自律航法手段としては、例えば、加速度センサ及びジャイロセンサを利用したものを挙げることができる。例えば、下記特許文献2(特開2000−221207号公報)には、加速度センサにより走行車体の進行方向の加速度を検出し、その検出値を積分することで車速を検出する「走行速度検出装置」が開示されている。また、下記特許文献3(特開平10−9877号公報)には、加速度センサにより自動車の前後方向の加速度を検出する一方、方位検出用ジャイロセンサの出力に基づいて遠心力情報を求め、前記遠心力情報から、自動車がカーブを走行していることを検出したとき、加速度センサの出力を積分して求めた車速を遠心力の影響を考慮して補償するようにした「車速検出システム」が開示されている。
【0008】
さらに、下記特許文献4(特開2010−78595号公報)には、加速度センサにより車両の上下方向の加速度を検出するとともに、ジャイロセンサにより車両のピッチレートを検出し、これらを用いて、路面のうねりを考慮した車速を算出するようにした「速度算出装置」が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−19759号公報(段落[0041]、[0042])
【特許文献2】特開2000−221207号公報(要約書)
【特許文献3】特開平10−9877号公報(段落[0011]、[0013])
【特許文献4】特開2010−78595号公報(要約書)
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上記特許文献2及び3では、車両が坂道を走行している場合や、凹凸のある路面を走行している場合、進行方向の加速度が重力加速度の影響を受けるため、速度の検出精度が低下する欠点がある。また、上記特許文献4では、路面のうねりが小さい場合に、速度の検出精度が低下する欠点がある。従って、上記のいずれの自律航法手段を用いても、車両が走行する道路の状況や車両の走行状態によっては、走行速度を高精度に検出できないことがある。
【0011】
本発明は、上記の問題点を解消することを課題とするものであり、移動体の速度を自律航法手段により高精度に検出することのできる移動速度検出装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、本願の請求項1にかかる発明は、移動体が移動する道路の道路属性を特定する道路属性特定手段と、前記移動体の移動速度を検出するための異なる複数の自律航法手段と、複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出することを特徴とする。
【0013】
本願の請求項2にかかる発明は、請求項1にかかる移動速度検出装置において、前記道路属性特定手段は、GPS衛星からGPS信号を受信するGPS受信部を備え、前記GPS信号に基づく前記移動体の位置情報から前記道路属性を特定することを特徴とする。
【0014】
本願の請求項3にかかる発明は、請求項2にかかる移動速度検出装置において、前記道路属性特定手段は、前記道路属性を含む地図情報を記憶する地図情報記憶手段を備え、前記GPS信号に基づく前記移動体の前記位置情報に対応する前記地図情報から、前記道路属性を特定することを特徴とする。
【0015】
本願の請求項4にかかる発明は、請求項1にかかる移動速度検出装置において、前記道路属性特定手段は、前記移動体の移動状態を検出する移動状態検出手段を備え、前記移動状態から前記道路属性を特定することを特徴とする。
【0016】
本願の請求項5にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向の加速度を検出する加速度センサを備え、前記加速度から前記移動速度を求める第1自律航法手段を含むことを特徴とする
本願の請求項6にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向と直交する左右方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第2自律航法手段を含むことを特徴とする。
【0017】
本願の請求項7にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向と直交する上下方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第3自律航法手段を含むことを特徴とする。
【0018】
本願の請求項8にかかる発明は、移動体が移動する道路の道路属性を特定するステップと、前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、を有することを特徴とする。
【0019】
本願の請求項9にかかる発明は、請求項8にかかる速度検出方法において、前記道路属性を特定するステップでは、GPS衛星から受信したGPS信号に基づき、前記移動体の位置情報を取得し、前記位置情報から前記道路属性を特定することを特徴とする。
【0020】
本願の請求項10にかかる発明は、請求項8にかかる速度検出方法において、前記道路属性を特定するステップでは、前記移動体の移動状態から前記道路属性を特定することを特徴とする。
【発明の効果】
【0021】
請求項1にかかる発明においては、移動体が移動する道路の道路属性を特定する道路属性特定手段と、前記移動体の移動速度を検出するための異なる複数の自律航法手段と、複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出する。
【0022】
このように構成することにより、道路の状況に応じて、最適な自律航法手段を選択して速度を算出するため、極めて高精度な移動体の速度を得ることができる。
【0023】
請求項2にかかる発明においては、請求項1にかかる速度検出装置において、GPS受信部により受信したGPS信号に基づいて移動体の位置情報を取得し、その位置情報から道路属性を取得して、自律航法手段を選択することができる。
【0024】
請求項3にかかる発明においては、請求項2にかかる速度検出装置において、移動体の位置情報に対応した地図情報から、道路属性を特定することができる。
【0025】
請求項4にかかる発明においては、請求項1にかかる速度検出装置において、GPS受信部や自律航法手段を用いて、移動体の進行方向の変化や上下方向の変化などの移動状態を検出でき、その移動状態から道路属性を特定することができる。
【0026】
請求項5にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向の加速度を加速度センサにより検出し、その加速度に基づいて移動速度を求める手段とすることができる。
【0027】
請求項6にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向と直交する左右方向の加速度を加速度センサにより検出するとともに、移動体の角速度をジャイロセンサにより検出することにより、左右方向の加速度および角速度に基づいて移動速度を求める手段とすることができる。
【0028】
請求項7にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向と直交する上下方向の加速度を加速度センサにより検出するとともに、移動体の角速度をジャイロセンサにより検出することにより、上下方向の加速度および角速度に基づいて移動速度を求める手段とすることができる。
【0029】
請求項8にかかる発明においては、移動体が移動する道路の道路属性を特定するステップと、前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、を有することにより、道路の状況に応じて、最適な自律航法手段を選択して速度を算出するため、極めて高精度な移動体の速度を得ることができる。
【0030】
請求項9にかかる発明においては、請求項8にかかる速度検出方法において、GPS受信部により受信したGPS信号に基づいて移動体の位置情報を取得し、その位置情報から道路属性を取得して、自律航法手段を選択することができる。
【0031】
請求項10にかかる発明においては、請求項8にかかる速度検出方法において、移動体の移動状態を検出し、その移動状態から道路属性を特定することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の実施例におけるナビゲーション装置の構成ブロック図である。
【図2】本発明の実施例におけるナビゲーション装置による現在位置を算出する処理フローチャートである。
【図3】車両が走行する道路属性と、それを特定するための判断方法との関係説明図である。
【図4】特定された道路属性に基づいて自律航法手段を選択する参照テーブルの説明図である。
【発明を実施するための形態】
【0033】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するための速度検出装置及び方法を例示するものであって、本発明をこの速度検出装置及び方法に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態の速度検出装置及び方法にも等しく適応し得るものである。
【実施例】
【0034】
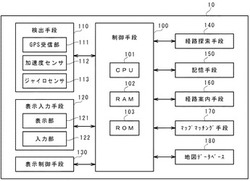
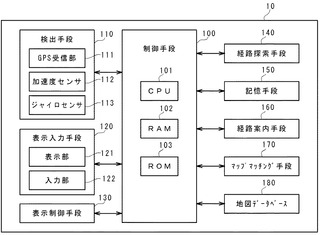
図1は、本発明の速度検出装置及び方法が適用される本実施例にかかるナビゲーション装置10の構成ブロック図である。ナビゲーション装置10は、車両に搭載可能であるとともに、車両から取り外して携帯し、例えば、利用者に歩行経路を案内することのできるPNDとして利用可能なものである。
【0035】
ナビゲーション装置10は制御手段100、検出手段110、表示入力手段120、表示制御手段130、経路探索手段140、記憶手段150、経路案内手段160、マップマッチング手段170、及び、地図データベース180を備えて構成される。
【0036】
制御手段100は、CPU101、RAM102、ROM103を備えて構成されており、RAM102及び/又はROM103に記憶された制御プログラムをCPU101において実行することにより、下記に説明する各部の動作を制御・統括する。
【0037】
検出手段110は、他律航法手段を構成するGPS受信部111を備える。制御手段100は、GPS受信部111が所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)に基づき、車両の現在位置(GPS方位情報、GPS高度情報、GPS緯度経度情報)を算出する。
【0038】
また、検出手段110は、車速を検出する自己完結型の自律航法手段を構成する加速度センサ112及びジャイロセンサ113を備える。加速度センサ112は、車両の走行に伴って発生する直交3軸方向(車両の前後方向、左右方向及び上下方向)の加速度を検出し、ジャイロセンサ113は、車両の走行に伴って発生する直交3軸方向(車両の前後方向、左右方向及び上下方向)の角速度を検出する。これらによって検出された加速度及び角速度を適宜組み合わせることにより、車両の走行速度である車速を高精度に検出することができ、車両の現在位置を算出することができる。
【0039】
GPS受信部111による現在位置の算出(測位)は、所定の時間間隔、例えば1秒間に1回行われる。従って、あるタイミングでGPS受信部111により現在位置が算出されると、その後1秒間はGPSによる現在位置の算出結果を得ることができない。GPSによる現在位置の算出が行われない間の時間は、自律航法手段により現在位置を算出して補間する。
【0040】
また、自律航法手段を備えることで、GPS衛星信号が受信できないトンネルや地下街、地下駐車場、建物内の駐車場、あるいは、高層ビル街などGPS衛星信号の反射によるマルチパスの影響を受ける場所でも、ナビゲーション装置10(車両)の現在位置を高精度に算出することができる。さらに、これらの自律航法手段を備えるナビゲーション装置10は、車両と接続する必要がないため、車載型のナビゲーション装置10として利用する形態と、車両から取り外して利用するPNDの形態とを容易に使い分けることができる。
【0041】
表示入力手段120は、表示部121及び入力部122から構成される。表示部121は、液晶表示ユニットであり、入力部122は、液晶表示ユニットの液晶画面上に取り付けられたタッチパネルである。表示部121は、本実施例のナビゲーション装置10で表示される地図画像、案内経路を示す表示画像等を表示し、入力部122は、利用者により操作されて、出発位置、目的位置等の経路探索条件の入力を行うのに用いられる。表示制御手段130は、記憶手段150に記憶された案内経路(後述)に沿って地図データベース180から抽出された地図画像を処理して表示部121に表示したり、地図画像に案内経路を示す表示画像を重ねて表示部121に表示したりするものである。
【0042】
経路探索手段140は、出発位置、又は、検出手段110によって検出された情報に基づいて算出された現在位置から、表示入力手段120を用いて利用者が設定した目的位置に至る最適な経路(案内経路)を、地図データベース180に記憶されている地図情報を参照して探索する。経路探索手段140は、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として探索する。
【0043】
記憶手段150は、車両が走行する道路の特定された道路属性(後述)と、道路属性に応じて選択される車速を検出する自律航法手段との関係が設定された参照テーブル190(図4)を記憶する。また、記憶手段150は、選択される複数の自律航法手段を記憶する。ここで、自律航法手段とは、検出手段110を構成する加速度センサ112又はジャイロセンサ113と、これらを用いて車速を算出するアルゴリズムとからなる車速算出手法を含むものとする。さらに、記憶手段150は、表示入力手段120によって利用者が入力した出発位置や目的位置を記憶するとともに、経路探索手段140によって経路探索された案内経路を案内経路データとして記憶する。
【0044】
経路案内手段160は、記憶手段150に記憶された案内経路と、検出された車速から算出される車両の現在位置とに基づいて、表示制御手段130に地図データベース180から現在位置周辺の地図情報の抽出と案内経路を示す表示画像の表示を指示するものである。表示制御手段130は、抽出した地図画像に案内経路を示す表示画像を重ねて表示部121に表示させる。また、経路案内手段160は、ナビゲーション装置10がスピーカ等を備える場合には、経路案内の音声ガイダンスを放送するなどしてユーザが案内経路に沿って移動するのを助ける。なお、音声ガイダンスは、道路データに対応付けられて地図データベース180等に記憶されていることが好ましい。
【0045】
マップマッチング手段170は、算出された現在位置を仮想現在位置とし、その仮想現在位置の近隣にあるマップマッチングの候補となるリンクを特定する。次いで、マップマッチング手段170は、仮想現在位置からそれらのリンクに垂線を下ろし、垂線とリンクの交点を実際の現在位置候補とし、仮想現在位置から現在位置候補までの距離に、これらマップマッチングの候補となるリンクに対する信頼度をそれぞれ加味して最も信頼度の高いリンク上の位置を実際の現在位置とする。
【0046】
地図データベース180は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持している。
【0047】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称を示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0048】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための第1道路種別、それぞれの道路の本線や連結路を区別するための第2道路種別、道路の傾斜(坂道)を表す上り/下り属性、カーブの場合の曲率半径、新設道路であるのか、旧道路であるのかを判別するための道路状況、ノード間の距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。上り/下り属性には、上記の情報に加えて、道路の実際の勾配の情報が記憶されるようにしてもよい。リンクデータは、上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0049】
建物データは、建物の少なくとも3点からなる位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。
【0050】
テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0051】
なお、上記のナビゲーション装置10は、地図データベース180をナビゲーショ装置10に内蔵したスタンドアロン型のものとして説明したが、本発明はこれに限定されることはない。例えば、ナビゲーション装置10に通信手段(図示せず)を設け、ナビゲーション装置10の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから上記の案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0052】
その場合、ナビゲーション装置10は、出発地点又は現在地点と目的地点とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは経路探索手段が設けられており、ナビゲーション装置10から受信した出発地点又は現在地点と目的地点とを経路探索条件として経路探索を行い、探索結果をナビゲーション装置10へ送信する。
【0053】
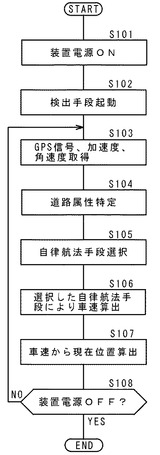
次に、図2に示す処理フローチャートに従い、車両に搭載されたナビゲーション装置10により車両の現在位置を検出する処理について説明する。
【0054】
先ず、車両のエンジン始動に伴い、ナビゲーション装置10の電源が投入(ON)されると(ステップS101)、制御手段100は、検出手段110を起動する(ステップS102)。この状態において、車両の走行が開始される。
【0055】
車両の走行中において、GPS受信部111は、GPS衛星から時刻情報及び衛星の位置情報を含むGPS信号を受信し、制御手段100に送信する(ステップS103)。また、加速度センサ112は、車両の前後方向(進行方向)、左右方向及び上下方向の加速度を検出し、制御手段100に送信する(ステップS103)。さらに、ジャイロセンサ113は、車両の走行に伴って発生する前後方向、左右方向及び上下方向の角速度を検出し、制御手段100に送信する(ステップS103)。
【0056】
制御手段100は、取得したGPS信号、加速度及び角速度に基づき、車両が走行している道路の属性を特定する(ステップS104)。すなわち、制御手段100は、GPS信号に基づき、車両の現在位置の位置情報(緯度情報、経度情報、方位情報、高度情報)を算出し、この位置情報に対応して地図データベース180に記憶されている地図情報の道路データに基づき、例えば、車両が現在走行中の道路が、カーブなのか、直進なのか、坂道なのか、平坦なのか、路面状況が良好な新設道路なのか、凹凸の多い旧道路なのか、といった道路属性を特定する。
【0057】
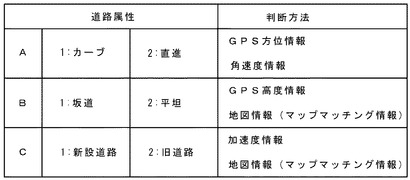
なお、これらの道路属性は、地図情報に付加された道路データを用いるのではなく、GPS受信部111で受信して得られた車両の位置情報、加速度センサ112により検出した加速度、又は、ジャイロセンサ113により検出した角速度の情報から推定することもできる。例えば、図3に例示するように、GPS信号から得られる方位情報の変化、又は、角速度の情報に基づき、車両(移動体)の進行方向の変化や上下方向の変化などの移動状態、即ち、車両がカーブを走行中であるのか、直進しているのかを判定することができる。また、GPS信号から得られる高度情報の変化に基づき、車両が坂道を走行中であるのか、平坦な道路を走行中であるのかを判定することができる。さらに、上下方向の加速度の情報に基づき、路面状況が良好な新設道路を走行中であるのか、凹凸の多い旧道路を走行中であるのかを判定することができる。
【0058】
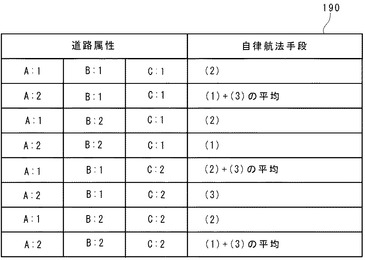
次に、制御手段100は、特定された道路属性に従い、車両の車速を算出するために用いる自律航法手段を選択する(ステップS105)。図4は、特定された道路属性に基づいて自律航法手段を選択する参照テーブル190であり、この参照テーブル190は、記憶手段150に記憶されている。この場合、自律航法手段(1)〜(3)は、以下の算出方法を表す。また、「(1)+(3)の平均」は、自律航法手段(1)で算出した車速と、自律航法手段(3)で算出した車速とを平均して求める算出方法を表す。「(2)+(3)の平均」についても同様である。
(1) 加速度センサ112により検出した車両の進行方向(前後方向)の加速度を積分することにより、車速を算出する方法(第1自律航法手段)。
(2) 加速度センサ112により検出した車両の左右方向の加速度と、ジャイロセンサ113により検出した左右方向の角速度とから、車速を算出する方法(第2自律航法手段)。
(3) 加速度センサ112により検出した車両の上下方向の加速度と、ジャイロセンサ113により検出した上下方向の角速度とから、車速を算出する方法(第3自律航法手段)。
【0059】
自律航法手段(1)は、車両が平坦(B:2)な道路を直進(A:2)し、且つ、その道路の路面状況が良好(C:1)であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(1)が選択される。
【0060】
自律航法手段(2)は、車両が平坦(B:2)な道路のカーブ(A:1)を走行中であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(2)が選択される。なお、車両が道路を直進(A:2)しているときには、ジャイロセンサ113から出力が得られず、車速を算出できないため、この自律航法手段(2)は選択されない。
【0061】
自律航法手段(3)は、車両が坂道(B:2)を直進(A:1)し、且つ、その道路が凹凸の多い旧道路(C:2)を走行中であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(3)が選択される。
【0062】
その他、道路属性に応じて、自律航法手段(1)〜(3)を適宜組み合わせた手段が選択される。
【0063】
そこで、制御手段100は、特定された道路属性に従って選択した最適な自律航法手段(1)〜(3)に基づき、車両の車速を算出する(ステップS106)。この場合、例えば、車両がGPS信号を受信した後、トンネル内等のGPS信号を受信できない場所を走行中であっても、自律航法手段により、車両の現在位置を継続して高精度に求めることができる。また、車両がカーブや、坂道、あるいは、凹凸の多い旧道路を走行している場合であっても、その道路属性に応じた最適な自律航法手段が選択されるため、道路状況にかかわらず、車両の車速を高精度に算出することができる。
【0064】
次いで、制御手段100は、ステップS103において、GPS受信部111から受信したGPS信号に基づく車両の位置情報と、自律航法手段により算出された高精度な車速とを用いて、車両の現在位置を算出する(ステップS107)。
【0065】
以上の処理は、車両が停止してナビゲーション装置10の電源がOFFとされるまで継続される(ステップS108:NO)。
【0066】
以上のようにして、車両の現在位置が算出された状態において、利用者が表示入力手段120を用いて、経路案内のために、出発位置又は算出された現在位置から目的位置を設定すると、経路探索手段140は、これらの情報に従い、地図データベース180に記憶されている地図情報を用いて、目的位置に至る最適な経路を探索する。探索された案内経路は、経路案内手段160により表示部121に表示され、利用者に提示される。
【0067】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0068】
例えば、自律航法手段を構成するセンサとして、加速度センサ及びジャイロセンサを例示したが、これらに限られるものではない。例えば、方位に基づいて車両がカーブを走行中であることを検出するセンサとして、地磁気センサを利用することができる。また、高度の変化に基づいて車両が坂道を走行中であることを検出するセンサとして、気圧センサを利用することができる。
【0069】
また、道路属性に応じて選択される自律航法手段の組み合わせは、図4に例示したものに限定されるものではなく、例えば、異なる複数の自律航法手段により車速を算出し、道路属性に従った重み付けを算出された車速に付加して求めるようにしてもよい。
【符号の説明】
【0070】
10・・・ナビゲーション装置
100・・・制御手段
110・・・検出手段
111・・・GPS受信部
112・・・加速度センサ
113・・・ジャイロセンサ
120・・・表示入力手段
130・・・表示制御手段
140・・・経路探索手段
150・・・記憶手段
160・・・経路案内手段
170・・・マップマッチング手段
180・・・地図データベース
190・・・参照テーブル
【技術分野】
【0001】
本発明は、速度検出装置及び方法に関するものであり、特に、自律航法手段により移動体の速度を高精度に検出することができる速度検出装置及び方法に関するものである。
【背景技術】
【0002】
例えば、車両に搭載されるナビゲーション装置は、GPS衛星からのGPS信号を受信し、その情報に基づいて車両の現在位置を算出し、算出した現在位置を、ナビゲーション装置に設けられた表示画面に表示されている地図上に重ねて表示させることにより、利用者に車両の現在位置を提示することができる。
【0003】
ところで、GPS信号のみを用いて算出された現在位置には、通常、10m前後の誤差が含まれるため、その現在位置をそのまま適用すると、正しい道路上に現在位置が表示されない恐れがある。また、車両がトンネル内や高層ビルの谷間を走行しているような場合には、GPS信号を受信できないため、現在位置の算出自体ができなくなってしまう。
【0004】
そこで、GPS信号から算出した現在位置を地図上の適切な位置にマッチングするマップマッチング処理や、車両から取得した車速や移動距離等の走行情報を用いて、GPS信号から算出した現在位置を補間する方法が提案されている。
【0005】
例えば、下記特許文献1(特開2010−19759号公報)には、GPS信号を用いて現在位置を算出する他律航法手段と、車速センサ及びジャイロスコープから取得した車両の走行情報を用いて現在位置を算出する自律航法手段とを備え、他律航法手段による現在位置の算出精度が低下していると判定された場合、自律航法手段に切り替えて車両の現在位置を算出するように構成した「走行車線検出装置」が開示されている。
【0006】
一方、ナビゲーション装置には、車両に固定的に設置されるのではなく、必要に応じて車両から取り外して携帯し、例えば、歩行経路を利用者に案内する用途に利用可能なポータブル型のナビゲーション装置(PND:Portable Navigation Device)がある。この場合、PNDを車両に搭載し、特許文献1に開示された自律航法手段を用いて現在位置を高精度に検出しようとすると、車両側の車速センサとナビゲーション装置とを接続する作業が必要になる。このような作業は、非常に煩わしく、また、車両によっては、PNDとの接続に対応していないものもあるため、近年のPNDは、車両の走行情報、例えば、車速をPND単体で検出可能とした自己完結型の自律航法手段を備えるものが主流になりつつある。
【0007】
ここで、車速の検出に用いられる自律航法手段としては、例えば、加速度センサ及びジャイロセンサを利用したものを挙げることができる。例えば、下記特許文献2(特開2000−221207号公報)には、加速度センサにより走行車体の進行方向の加速度を検出し、その検出値を積分することで車速を検出する「走行速度検出装置」が開示されている。また、下記特許文献3(特開平10−9877号公報)には、加速度センサにより自動車の前後方向の加速度を検出する一方、方位検出用ジャイロセンサの出力に基づいて遠心力情報を求め、前記遠心力情報から、自動車がカーブを走行していることを検出したとき、加速度センサの出力を積分して求めた車速を遠心力の影響を考慮して補償するようにした「車速検出システム」が開示されている。
【0008】
さらに、下記特許文献4(特開2010−78595号公報)には、加速度センサにより車両の上下方向の加速度を検出するとともに、ジャイロセンサにより車両のピッチレートを検出し、これらを用いて、路面のうねりを考慮した車速を算出するようにした「速度算出装置」が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−19759号公報(段落[0041]、[0042])
【特許文献2】特開2000−221207号公報(要約書)
【特許文献3】特開平10−9877号公報(段落[0011]、[0013])
【特許文献4】特開2010−78595号公報(要約書)
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上記特許文献2及び3では、車両が坂道を走行している場合や、凹凸のある路面を走行している場合、進行方向の加速度が重力加速度の影響を受けるため、速度の検出精度が低下する欠点がある。また、上記特許文献4では、路面のうねりが小さい場合に、速度の検出精度が低下する欠点がある。従って、上記のいずれの自律航法手段を用いても、車両が走行する道路の状況や車両の走行状態によっては、走行速度を高精度に検出できないことがある。
【0011】
本発明は、上記の問題点を解消することを課題とするものであり、移動体の速度を自律航法手段により高精度に検出することのできる移動速度検出装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、本願の請求項1にかかる発明は、移動体が移動する道路の道路属性を特定する道路属性特定手段と、前記移動体の移動速度を検出するための異なる複数の自律航法手段と、複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出することを特徴とする。
【0013】
本願の請求項2にかかる発明は、請求項1にかかる移動速度検出装置において、前記道路属性特定手段は、GPS衛星からGPS信号を受信するGPS受信部を備え、前記GPS信号に基づく前記移動体の位置情報から前記道路属性を特定することを特徴とする。
【0014】
本願の請求項3にかかる発明は、請求項2にかかる移動速度検出装置において、前記道路属性特定手段は、前記道路属性を含む地図情報を記憶する地図情報記憶手段を備え、前記GPS信号に基づく前記移動体の前記位置情報に対応する前記地図情報から、前記道路属性を特定することを特徴とする。
【0015】
本願の請求項4にかかる発明は、請求項1にかかる移動速度検出装置において、前記道路属性特定手段は、前記移動体の移動状態を検出する移動状態検出手段を備え、前記移動状態から前記道路属性を特定することを特徴とする。
【0016】
本願の請求項5にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向の加速度を検出する加速度センサを備え、前記加速度から前記移動速度を求める第1自律航法手段を含むことを特徴とする
本願の請求項6にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向と直交する左右方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第2自律航法手段を含むことを特徴とする。
【0017】
本願の請求項7にかかる発明は、請求項1〜4のいずれか1項に記載の速度検出装置において、前記自律航法手段は、前記移動体の進行方向と直交する上下方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第3自律航法手段を含むことを特徴とする。
【0018】
本願の請求項8にかかる発明は、移動体が移動する道路の道路属性を特定するステップと、前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、を有することを特徴とする。
【0019】
本願の請求項9にかかる発明は、請求項8にかかる速度検出方法において、前記道路属性を特定するステップでは、GPS衛星から受信したGPS信号に基づき、前記移動体の位置情報を取得し、前記位置情報から前記道路属性を特定することを特徴とする。
【0020】
本願の請求項10にかかる発明は、請求項8にかかる速度検出方法において、前記道路属性を特定するステップでは、前記移動体の移動状態から前記道路属性を特定することを特徴とする。
【発明の効果】
【0021】
請求項1にかかる発明においては、移動体が移動する道路の道路属性を特定する道路属性特定手段と、前記移動体の移動速度を検出するための異なる複数の自律航法手段と、複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出する。
【0022】
このように構成することにより、道路の状況に応じて、最適な自律航法手段を選択して速度を算出するため、極めて高精度な移動体の速度を得ることができる。
【0023】
請求項2にかかる発明においては、請求項1にかかる速度検出装置において、GPS受信部により受信したGPS信号に基づいて移動体の位置情報を取得し、その位置情報から道路属性を取得して、自律航法手段を選択することができる。
【0024】
請求項3にかかる発明においては、請求項2にかかる速度検出装置において、移動体の位置情報に対応した地図情報から、道路属性を特定することができる。
【0025】
請求項4にかかる発明においては、請求項1にかかる速度検出装置において、GPS受信部や自律航法手段を用いて、移動体の進行方向の変化や上下方向の変化などの移動状態を検出でき、その移動状態から道路属性を特定することができる。
【0026】
請求項5にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向の加速度を加速度センサにより検出し、その加速度に基づいて移動速度を求める手段とすることができる。
【0027】
請求項6にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向と直交する左右方向の加速度を加速度センサにより検出するとともに、移動体の角速度をジャイロセンサにより検出することにより、左右方向の加速度および角速度に基づいて移動速度を求める手段とすることができる。
【0028】
請求項7にかかる発明においては、請求項1〜4のいずれか1項にかかる速度検出装置において、自律航法手段は、移動体の進行方向と直交する上下方向の加速度を加速度センサにより検出するとともに、移動体の角速度をジャイロセンサにより検出することにより、上下方向の加速度および角速度に基づいて移動速度を求める手段とすることができる。
【0029】
請求項8にかかる発明においては、移動体が移動する道路の道路属性を特定するステップと、前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、を有することにより、道路の状況に応じて、最適な自律航法手段を選択して速度を算出するため、極めて高精度な移動体の速度を得ることができる。
【0030】
請求項9にかかる発明においては、請求項8にかかる速度検出方法において、GPS受信部により受信したGPS信号に基づいて移動体の位置情報を取得し、その位置情報から道路属性を取得して、自律航法手段を選択することができる。
【0031】
請求項10にかかる発明においては、請求項8にかかる速度検出方法において、移動体の移動状態を検出し、その移動状態から道路属性を特定することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の実施例におけるナビゲーション装置の構成ブロック図である。
【図2】本発明の実施例におけるナビゲーション装置による現在位置を算出する処理フローチャートである。
【図3】車両が走行する道路属性と、それを特定するための判断方法との関係説明図である。
【図4】特定された道路属性に基づいて自律航法手段を選択する参照テーブルの説明図である。
【発明を実施するための形態】
【0033】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するための速度検出装置及び方法を例示するものであって、本発明をこの速度検出装置及び方法に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態の速度検出装置及び方法にも等しく適応し得るものである。
【実施例】
【0034】
図1は、本発明の速度検出装置及び方法が適用される本実施例にかかるナビゲーション装置10の構成ブロック図である。ナビゲーション装置10は、車両に搭載可能であるとともに、車両から取り外して携帯し、例えば、利用者に歩行経路を案内することのできるPNDとして利用可能なものである。
【0035】
ナビゲーション装置10は制御手段100、検出手段110、表示入力手段120、表示制御手段130、経路探索手段140、記憶手段150、経路案内手段160、マップマッチング手段170、及び、地図データベース180を備えて構成される。
【0036】
制御手段100は、CPU101、RAM102、ROM103を備えて構成されており、RAM102及び/又はROM103に記憶された制御プログラムをCPU101において実行することにより、下記に説明する各部の動作を制御・統括する。
【0037】
検出手段110は、他律航法手段を構成するGPS受信部111を備える。制御手段100は、GPS受信部111が所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)に基づき、車両の現在位置(GPS方位情報、GPS高度情報、GPS緯度経度情報)を算出する。
【0038】
また、検出手段110は、車速を検出する自己完結型の自律航法手段を構成する加速度センサ112及びジャイロセンサ113を備える。加速度センサ112は、車両の走行に伴って発生する直交3軸方向(車両の前後方向、左右方向及び上下方向)の加速度を検出し、ジャイロセンサ113は、車両の走行に伴って発生する直交3軸方向(車両の前後方向、左右方向及び上下方向)の角速度を検出する。これらによって検出された加速度及び角速度を適宜組み合わせることにより、車両の走行速度である車速を高精度に検出することができ、車両の現在位置を算出することができる。
【0039】
GPS受信部111による現在位置の算出(測位)は、所定の時間間隔、例えば1秒間に1回行われる。従って、あるタイミングでGPS受信部111により現在位置が算出されると、その後1秒間はGPSによる現在位置の算出結果を得ることができない。GPSによる現在位置の算出が行われない間の時間は、自律航法手段により現在位置を算出して補間する。
【0040】
また、自律航法手段を備えることで、GPS衛星信号が受信できないトンネルや地下街、地下駐車場、建物内の駐車場、あるいは、高層ビル街などGPS衛星信号の反射によるマルチパスの影響を受ける場所でも、ナビゲーション装置10(車両)の現在位置を高精度に算出することができる。さらに、これらの自律航法手段を備えるナビゲーション装置10は、車両と接続する必要がないため、車載型のナビゲーション装置10として利用する形態と、車両から取り外して利用するPNDの形態とを容易に使い分けることができる。
【0041】
表示入力手段120は、表示部121及び入力部122から構成される。表示部121は、液晶表示ユニットであり、入力部122は、液晶表示ユニットの液晶画面上に取り付けられたタッチパネルである。表示部121は、本実施例のナビゲーション装置10で表示される地図画像、案内経路を示す表示画像等を表示し、入力部122は、利用者により操作されて、出発位置、目的位置等の経路探索条件の入力を行うのに用いられる。表示制御手段130は、記憶手段150に記憶された案内経路(後述)に沿って地図データベース180から抽出された地図画像を処理して表示部121に表示したり、地図画像に案内経路を示す表示画像を重ねて表示部121に表示したりするものである。
【0042】
経路探索手段140は、出発位置、又は、検出手段110によって検出された情報に基づいて算出された現在位置から、表示入力手段120を用いて利用者が設定した目的位置に至る最適な経路(案内経路)を、地図データベース180に記憶されている地図情報を参照して探索する。経路探索手段140は、出発位置又は現在位置に対応する道路のノードから目的位置に対応するノードに至るまでのリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)又は総所要時間が最短となる経路を案内経路として探索する。
【0043】
記憶手段150は、車両が走行する道路の特定された道路属性(後述)と、道路属性に応じて選択される車速を検出する自律航法手段との関係が設定された参照テーブル190(図4)を記憶する。また、記憶手段150は、選択される複数の自律航法手段を記憶する。ここで、自律航法手段とは、検出手段110を構成する加速度センサ112又はジャイロセンサ113と、これらを用いて車速を算出するアルゴリズムとからなる車速算出手法を含むものとする。さらに、記憶手段150は、表示入力手段120によって利用者が入力した出発位置や目的位置を記憶するとともに、経路探索手段140によって経路探索された案内経路を案内経路データとして記憶する。
【0044】
経路案内手段160は、記憶手段150に記憶された案内経路と、検出された車速から算出される車両の現在位置とに基づいて、表示制御手段130に地図データベース180から現在位置周辺の地図情報の抽出と案内経路を示す表示画像の表示を指示するものである。表示制御手段130は、抽出した地図画像に案内経路を示す表示画像を重ねて表示部121に表示させる。また、経路案内手段160は、ナビゲーション装置10がスピーカ等を備える場合には、経路案内の音声ガイダンスを放送するなどしてユーザが案内経路に沿って移動するのを助ける。なお、音声ガイダンスは、道路データに対応付けられて地図データベース180等に記憶されていることが好ましい。
【0045】
マップマッチング手段170は、算出された現在位置を仮想現在位置とし、その仮想現在位置の近隣にあるマップマッチングの候補となるリンクを特定する。次いで、マップマッチング手段170は、仮想現在位置からそれらのリンクに垂線を下ろし、垂線とリンクの交点を実際の現在位置候補とし、仮想現在位置から現在位置候補までの距離に、これらマップマッチングの候補となるリンクに対する信頼度をそれぞれ加味して最も信頼度の高いリンク上の位置を実際の現在位置とする。
【0046】
地図データベース180は、道路データ、建物データ、背景データ、テキストデータから構成される地図情報を保持している。
【0047】
道路データは、道路をその屈曲点、分岐点等の結節点をノードとするノードデータと、それぞれのノード間を結ぶ経路をリンクとしたリンクデータから構成される。ノードデータは、ノード番号、ノードの位置座標(緯度・経度)、交差点情報や交差点名称を示す情報等のノード属性、さらに接続リンク本数、接続リンク番号のデータを含んで構成される。
【0048】
また、リンクデータは、リンクの始点及び終点となるノード番号、高速道路や一般道や街路等を区別するための第1道路種別、それぞれの道路の本線や連結路を区別するための第2道路種別、道路の傾斜(坂道)を表す上り/下り属性、カーブの場合の曲率半径、新設道路であるのか、旧道路であるのかを判別するための道路状況、ノード間の距離及び/又は所要時間、国道○号線のような道路名称、進行方向のデータを含んで構成される。上り/下り属性には、上記の情報に加えて、道路の実際の勾配の情報が記憶されるようにしてもよい。リンクデータは、上記に加えて、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0049】
建物データは、建物の少なくとも3点からなる位置座標(緯度・経度)、駅、ビル、民家等の建物の種別、表示色のデータを含んで構成される。また背景データは、海岸線、湖沼、河川形状、山林等の背景画像データとなる少なくとも3点からなる位置座標(緯度・経度)、表示色のデータを含んで構成される。
【0050】
テキストデータは、それぞれの地名や河川名等の文字(名称)、及びその座標(緯度・経度)のデータを含んで構成される。
【0051】
なお、上記のナビゲーション装置10は、地図データベース180をナビゲーショ装置10に内蔵したスタンドアロン型のものとして説明したが、本発明はこれに限定されることはない。例えば、ナビゲーション装置10に通信手段(図示せず)を設け、ナビゲーション装置10の外部の情報提供サーバ(図示せず)に接続して通信を行い、情報提供サーバに備えられた地図データベースから上記の案内経路に関連付けられた地図情報を取得するようにしてもよい。
【0052】
その場合、ナビゲーション装置10は、出発地点又は現在地点と目的地点とを指定し、これを経路探索条件として情報提供サーバに送信し、経路探索を依頼する。情報提供サーバは経路探索手段が設けられており、ナビゲーション装置10から受信した出発地点又は現在地点と目的地点とを経路探索条件として経路探索を行い、探索結果をナビゲーション装置10へ送信する。
【0053】
次に、図2に示す処理フローチャートに従い、車両に搭載されたナビゲーション装置10により車両の現在位置を検出する処理について説明する。
【0054】
先ず、車両のエンジン始動に伴い、ナビゲーション装置10の電源が投入(ON)されると(ステップS101)、制御手段100は、検出手段110を起動する(ステップS102)。この状態において、車両の走行が開始される。
【0055】
車両の走行中において、GPS受信部111は、GPS衛星から時刻情報及び衛星の位置情報を含むGPS信号を受信し、制御手段100に送信する(ステップS103)。また、加速度センサ112は、車両の前後方向(進行方向)、左右方向及び上下方向の加速度を検出し、制御手段100に送信する(ステップS103)。さらに、ジャイロセンサ113は、車両の走行に伴って発生する前後方向、左右方向及び上下方向の角速度を検出し、制御手段100に送信する(ステップS103)。
【0056】
制御手段100は、取得したGPS信号、加速度及び角速度に基づき、車両が走行している道路の属性を特定する(ステップS104)。すなわち、制御手段100は、GPS信号に基づき、車両の現在位置の位置情報(緯度情報、経度情報、方位情報、高度情報)を算出し、この位置情報に対応して地図データベース180に記憶されている地図情報の道路データに基づき、例えば、車両が現在走行中の道路が、カーブなのか、直進なのか、坂道なのか、平坦なのか、路面状況が良好な新設道路なのか、凹凸の多い旧道路なのか、といった道路属性を特定する。
【0057】
なお、これらの道路属性は、地図情報に付加された道路データを用いるのではなく、GPS受信部111で受信して得られた車両の位置情報、加速度センサ112により検出した加速度、又は、ジャイロセンサ113により検出した角速度の情報から推定することもできる。例えば、図3に例示するように、GPS信号から得られる方位情報の変化、又は、角速度の情報に基づき、車両(移動体)の進行方向の変化や上下方向の変化などの移動状態、即ち、車両がカーブを走行中であるのか、直進しているのかを判定することができる。また、GPS信号から得られる高度情報の変化に基づき、車両が坂道を走行中であるのか、平坦な道路を走行中であるのかを判定することができる。さらに、上下方向の加速度の情報に基づき、路面状況が良好な新設道路を走行中であるのか、凹凸の多い旧道路を走行中であるのかを判定することができる。
【0058】
次に、制御手段100は、特定された道路属性に従い、車両の車速を算出するために用いる自律航法手段を選択する(ステップS105)。図4は、特定された道路属性に基づいて自律航法手段を選択する参照テーブル190であり、この参照テーブル190は、記憶手段150に記憶されている。この場合、自律航法手段(1)〜(3)は、以下の算出方法を表す。また、「(1)+(3)の平均」は、自律航法手段(1)で算出した車速と、自律航法手段(3)で算出した車速とを平均して求める算出方法を表す。「(2)+(3)の平均」についても同様である。
(1) 加速度センサ112により検出した車両の進行方向(前後方向)の加速度を積分することにより、車速を算出する方法(第1自律航法手段)。
(2) 加速度センサ112により検出した車両の左右方向の加速度と、ジャイロセンサ113により検出した左右方向の角速度とから、車速を算出する方法(第2自律航法手段)。
(3) 加速度センサ112により検出した車両の上下方向の加速度と、ジャイロセンサ113により検出した上下方向の角速度とから、車速を算出する方法(第3自律航法手段)。
【0059】
自律航法手段(1)は、車両が平坦(B:2)な道路を直進(A:2)し、且つ、その道路の路面状況が良好(C:1)であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(1)が選択される。
【0060】
自律航法手段(2)は、車両が平坦(B:2)な道路のカーブ(A:1)を走行中であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(2)が選択される。なお、車両が道路を直進(A:2)しているときには、ジャイロセンサ113から出力が得られず、車速を算出できないため、この自律航法手段(2)は選択されない。
【0061】
自律航法手段(3)は、車両が坂道(B:2)を直進(A:1)し、且つ、その道路が凹凸の多い旧道路(C:2)を走行中であれば、車速を高精度に算出することができるため、この場合には、参照テーブル190に従って自律航法手段(3)が選択される。
【0062】
その他、道路属性に応じて、自律航法手段(1)〜(3)を適宜組み合わせた手段が選択される。
【0063】
そこで、制御手段100は、特定された道路属性に従って選択した最適な自律航法手段(1)〜(3)に基づき、車両の車速を算出する(ステップS106)。この場合、例えば、車両がGPS信号を受信した後、トンネル内等のGPS信号を受信できない場所を走行中であっても、自律航法手段により、車両の現在位置を継続して高精度に求めることができる。また、車両がカーブや、坂道、あるいは、凹凸の多い旧道路を走行している場合であっても、その道路属性に応じた最適な自律航法手段が選択されるため、道路状況にかかわらず、車両の車速を高精度に算出することができる。
【0064】
次いで、制御手段100は、ステップS103において、GPS受信部111から受信したGPS信号に基づく車両の位置情報と、自律航法手段により算出された高精度な車速とを用いて、車両の現在位置を算出する(ステップS107)。
【0065】
以上の処理は、車両が停止してナビゲーション装置10の電源がOFFとされるまで継続される(ステップS108:NO)。
【0066】
以上のようにして、車両の現在位置が算出された状態において、利用者が表示入力手段120を用いて、経路案内のために、出発位置又は算出された現在位置から目的位置を設定すると、経路探索手段140は、これらの情報に従い、地図データベース180に記憶されている地図情報を用いて、目的位置に至る最適な経路を探索する。探索された案内経路は、経路案内手段160により表示部121に表示され、利用者に提示される。
【0067】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0068】
例えば、自律航法手段を構成するセンサとして、加速度センサ及びジャイロセンサを例示したが、これらに限られるものではない。例えば、方位に基づいて車両がカーブを走行中であることを検出するセンサとして、地磁気センサを利用することができる。また、高度の変化に基づいて車両が坂道を走行中であることを検出するセンサとして、気圧センサを利用することができる。
【0069】
また、道路属性に応じて選択される自律航法手段の組み合わせは、図4に例示したものに限定されるものではなく、例えば、異なる複数の自律航法手段により車速を算出し、道路属性に従った重み付けを算出された車速に付加して求めるようにしてもよい。
【符号の説明】
【0070】
10・・・ナビゲーション装置
100・・・制御手段
110・・・検出手段
111・・・GPS受信部
112・・・加速度センサ
113・・・ジャイロセンサ
120・・・表示入力手段
130・・・表示制御手段
140・・・経路探索手段
150・・・記憶手段
160・・・経路案内手段
170・・・マップマッチング手段
180・・・地図データベース
190・・・参照テーブル
【特許請求の範囲】
【請求項1】
移動体が移動する道路の道路属性を特定する道路属性特定手段と、
前記移動体の移動速度を検出するための異なる複数の自律航法手段と、
複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、
を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出することを特徴とする速度検出装置。
【請求項2】
前記道路属性特定手段は、GPS衛星からGPS信号を受信するGPS受信部を備え、前記GPS信号に基づく前記移動体の位置情報から前記道路属性を特定することを特徴とする請求項1記載の速度検出装置。
【請求項3】
前記道路属性特定手段は、前記道路属性を含む地図情報を記憶する地図情報記憶手段を備え、前記GPS信号に基づく前記移動体の前記位置情報に対応する前記地図情報から、前記道路属性を特定することを特徴とする請求項2記載の速度検出装置。
【請求項4】
前記道路属性特定手段は、前記移動体の移動状態を検出する移動状態検出手段を備え、前記移動状態から前記道路属性を特定することを特徴とする請求項1記載の速度検出装置。
【請求項5】
前記自律航法手段は、前記移動体の進行方向の加速度を検出する加速度センサを備え、前記加速度から前記移動速度を求める第1自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項6】
前記自律航法手段は、前記移動体の進行方向と直交する左右方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第2自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項7】
前記自律航法手段は、前記移動体の進行方向と直交する上下方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第3自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項8】
移動体が移動する道路の道路属性を特定するステップと、
前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、
選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、
を有することを特徴とする速度検出方法。
【請求項9】
前記道路属性を特定するステップでは、GPS衛星から受信したGPS信号に基づき、前記移動体の位置情報を取得し、前記位置情報から前記道路属性を特定することを特徴とする請求項8記載の速度検出方法。
【請求項10】
前記道路属性を特定するステップでは、前記移動体の移動状態から前記道路属性を特定することを特徴とする請求項8記載の速度検出方法。
【請求項1】
移動体が移動する道路の道路属性を特定する道路属性特定手段と、
前記移動体の移動速度を検出するための異なる複数の自律航法手段と、
複数の前記自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択する自律航法手段選択手段と、
を備え、選択された前記自律航法手段を用いて、前記移動体の移動速度を検出することを特徴とする速度検出装置。
【請求項2】
前記道路属性特定手段は、GPS衛星からGPS信号を受信するGPS受信部を備え、前記GPS信号に基づく前記移動体の位置情報から前記道路属性を特定することを特徴とする請求項1記載の速度検出装置。
【請求項3】
前記道路属性特定手段は、前記道路属性を含む地図情報を記憶する地図情報記憶手段を備え、前記GPS信号に基づく前記移動体の前記位置情報に対応する前記地図情報から、前記道路属性を特定することを特徴とする請求項2記載の速度検出装置。
【請求項4】
前記道路属性特定手段は、前記移動体の移動状態を検出する移動状態検出手段を備え、前記移動状態から前記道路属性を特定することを特徴とする請求項1記載の速度検出装置。
【請求項5】
前記自律航法手段は、前記移動体の進行方向の加速度を検出する加速度センサを備え、前記加速度から前記移動速度を求める第1自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項6】
前記自律航法手段は、前記移動体の進行方向と直交する左右方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第2自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項7】
前記自律航法手段は、前記移動体の進行方向と直交する上下方向の加速度を検出する加速度センサと、前記移動体の角速度を検出するジャイロセンサとを備え、前記加速度及び前記角速度から前記移動速度を求める第3自律航法手段を含むことを特徴とする請求項1〜4のいずれか1項に記載の速度検出装置。
【請求項8】
移動体が移動する道路の道路属性を特定するステップと、
前記移動体の移動速度を検出するための異なる複数の自律航法手段から、特定された前記道路属性に適合する前記自律航法手段を選択するステップと、
選択された前記自律航法手段を用いて、前記移動体の移動速度を検出するステップと、
を有することを特徴とする速度検出方法。
【請求項9】
前記道路属性を特定するステップでは、GPS衛星から受信したGPS信号に基づき、前記移動体の位置情報を取得し、前記位置情報から前記道路属性を特定することを特徴とする請求項8記載の速度検出方法。
【請求項10】
前記道路属性を特定するステップでは、前記移動体の移動状態から前記道路属性を特定することを特徴とする請求項8記載の速度検出方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−247396(P2012−247396A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−121882(P2011−121882)
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]