
速度測定方式
【発明の詳細な説明】
〔発明の目的〕
(産業上の利用分野)
本発明は、車両の速度測定方式に係り、特にトンネル内を走行する自動車の速度測定方式に関する。
(従来の技術)
一般に、路上を走行する車両の速度を測定する方式としては、レーダを用いる方式や磁気を用いる方式が知られており、これらの方式はいずれも専用のセンサや大規模な処理回路を必要としている。
ところで近年、交通管制のための種々の情報を得る手段として、ITV(Industrial Television)カメラを用いた道路交通状況監視システムが広く利用されている。
特に、高速自動車道などの大規模トンネルには、複数台のITVカメラを設置して成る大規模な監視システムが導入されており、この監視システムを流用して該トンネル内を走行する自動車の走行速度を測定しようとするシステムも実用化されている。
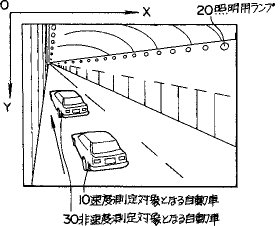
この種の速度測定システムは、トンネル内では自動車がテールランプを点灯して走行することを前提として第3図3図に示す如くの映像に対応してITVカメラから得られる映像信号を2値化し、トンネル内を走行する自動車10のテールランプに対応した2値化データの端点を抽出するとともに、該端点の2値化データにもとづき前記自動車10の走行速度を算出するものである。
このようにITVカメラを用いた速度測定システムでは、前述した各方式とは異なり、専用のセンサを必要とせず簡略な構成で済むうえ、速度情報以外にも交通管制上必要な各種の情報を収集することができる。
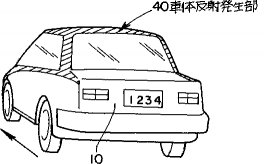
しかしながら通常トンネル内は、常時、照明用ランプ20で照明されていたり、速度測定対象外の自動車30が走行していたりすることから、前記ITVカメラの映像(第3図3図参照)上に、前記照明用ランプ20による第4図に示す如くの態様の車体反射発生部40や速度測定対象外の自動車30のテールランプが混在するケースが少なくない。
係る状況において、前記ITVカメラから得られる映像信号を2値化すると、該映像信号の前記車体反射発生部40や前記自動車30のテールランプに対応する部分が、速度測定上の基準となる特定部分すなわち前記自動車10のテールランプに対応する部分と同様に2値化され、それぞれの端点を検出されることになる。
このような場合、従来の速度測定方式では、速度測定対象である自動車10のテールランプに対応した端点の2値化データのみを抽出することができず、前記自動車10の速度を正確に測定することができなかった。
(発明が解決しようとする問題点)
このように上記従来の速度測定方式では、速度測定上の基準となる特定部分に対応する端点と、該特定部分以外の不要部分に対応する端点とが混在するような状況下では、前記特定部分に対応する端点の2値化データのみを抽出して速度測定対象である車両の正確な速度を測定することができないという問題点があった。
本発明は上記実情に鑑みてなされたものであり、速度測定上の基準となる特定部分に対応する端点と、不要部分に対応する端点とが混在する場合においても、前記特定部分に対応する端点の2値化データのみを抽出することができ、速度測定対象である車両の正確な速度測定に寄与し得る速度測定方式を提供することを目的とする。
〔発明の構成〕
(問題点を解決するための手段)
本発明は、速度測定対象となる車両を撮像する撮像手段と、該撮像手段から出力される映像信号を2値化する2値化手段と、該2値化手段から出力される2値化データ中のある輝度以上の画素に対応する端点を抽出する端点抽出手段と、該端点抽出手段により抽出された端点データ中の前記車両の特定の一部分に対応する端点データと前記車両の前記特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを予め想定される位置的条件に基づいて特定し、前記不要部分に対応する端点データを不要データとして除去する不要データ除去手段とを具備し、前記不要データ除去後の端点データを用いて前記車両の速度を測定することを特徴とする。
(作 用)
本発明の速度測定方式では、基準となる特定部分に対応する端点とともに混在する他の端点、例えばトンネル内照明用ランプによる車両の車体反射発生部等の不要部分に対応する端点の発生要件を解析し、該発生要件に応じて前記不要部分に対応する端点の2値化データを除去することによって上記目的を達成している。
(実施例)
以下、本発明の実施例を添付図面にもとづいて詳細に説明する。
第1図は、本発明に係る速度測定システムの一実施例を示すブロック図であり、ITVカメラ1、2値化回路2、同期分離回路3、タイミング発生回路4、端点抽出回路5、座標記憶回路6、マイクロコンピュータ7を具備して構成されている。
本発明の速度測定システムは、トンネル内(第3図参照)では自動車10がテールランプを点灯して走行するという前提にもとづき該トンネル内を走行する前記自動車10の速度を検出するものであり、以下に述べる如く動作する。
第1図において、ITVカメラ1により撮像されたトンネル内の映像に対応した映像信号は、2値化回路2に入力され、予め設定されたスレッショルドレベルにより2値化される。
ここで前記スレッショルドレベルは、自動車10のテールランプを速度測定上の基準となる特定部分としている都合上、前記映像信号のうちの前記テールランプに対応する部分が白画信号となり、道路やその他の背景に対応する部分が黒画信号として判定されるように設定されている。
一方、前記映像信号中の同期信号は、前述した2値化処理と同時に同期分離回路3に入力され、水平同期信号(HD)と垂直同期信号(VD)とに分離された後、それぞれタイミング発生回路4に入力される。
そしてタイミング発生回路4は、後述する端点の座標データ作成のためのクロックパルスを、前記同期分離回路3から入力される前記各同期信号に同期させて発生し、該クロックパルスを端点抽出回路5に入力する。
一方、前記2値化回路2で2値化された映像信号は、引き続いて前記端点抽出回路5に入力され、その端点を抽出される。ここで、前記端点は、別にタイミング発生回路4から端点抽出回路5に入力されるXYアドレスにより設定されたXY座標上における前記2値化データのうちの白画信号域の1座標データとして認識される。
こうして端点抽出回路5により抽出された前記端点の座標データは、次いで座標記憶回路6に記憶される。
尚、この座標記憶回路6における端点の座標データの記憶動作は、一定時間間隔t秒毎に行なわれる。
次いでマイクロコンピュータ7は、前記座標記憶回路6に記憶された各端点の座標データのうちの不要データを除去し、前記自動車10のテールランプに対応する端点の座標データのみを抽出しつつ、該端点の前記XY座標上におけるtxn秒間(nは任意の値)の移動量を求め、更に該移動量を実際の路面上における自動車10の走行距離に変換することにより当該自動車10の走行速度を算出する ところで高速道路等のトンネル内におけるITVカメラ1の映像信号を2値化回路2で2値化する際、白画信号として判定される要素としては、前述した速度測定対象となる自動車10のテールランプ以外にも、例えばトンネル内照明用ランプ20による前記自動車10の車体反射発生部40(第4図参照)や該自動車10の前方を走行する別の自動車30のテールランプ等がある。
そしてこれらの各要素は、前記2値化回路2により白画信号として判定された後、端点抽出回路5によりそれぞれの端点を抽出される。
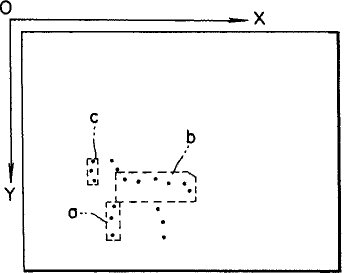
今、例えば第3図に示す如くのITVカメラ1の映像に対し同図に示す如くのXY座標を設定したとすれば、該映像に対する前記端点抽出回路5の端点抽出イメージは、第2図に示される如くとなる。
第2図では、黒点が端点として示されており、a領域が速度測定対象となる自動車10のテールランプに、b領域がトンネル内照明用ランプ20による前記自動車10の車体反射発生部40に、c領域が該自動車10の前方を走行する別の自動車30のテールランプにそれぞれ対応したものである。
そしてこの端点検出イメージが第3図に示す如くの映像に対応するものであることを考えれば、該端点検出イメージについて次のような発生条件をみいだすことができる。
I. トンネル内照明用ランプ20による車体反射発生部40は、第4図に示す如くテールランプの下側には生じない。
従ってYの最大値を持つ端点が速度測定対象となる自動車10のテールランプに相当し、そのうちのX値の小さい端点が左側のテールランプに相当する。
II. 前方を走行する別の自動車30がある場合、該自動車30の左側のテールランプに相当する端点のX値は、速度測定対象となる前記自動車10のテールランプに相当する端点のX値の特定範囲外の値を示す。
前述した速度測定のための前段階処理において前記マイクロコンピュータ7は、座標記憶回路6に記憶された端点の座標データ(第2図参照)のうちの不要データ(同図bおよびc領域に含まれる端点の座標データ等)を除去し、速度測定対象となる自動車10のテールランプに対応する端点(例えば同図a領域内の1端点)の座標データのみを抽出する際に、上記条件I,IIを参照してその処理を行なっている。
尚、本発明の速度測定システムは、既存のITVシステムを流用したものであるため、速度情報以外に、異常走行や渋滞状況など交通管制上有用な情報も提供できるのは言うまでもない。
また速度測定対象となる車両も乗用車に限定されるものではなく、ITVカメラの設置されたトンネル内を走行する機会のある車種全般に対して適用できるものである。
〔発明の効果〕
以上説明したように、本願発明によれば、映像信号から抽出した端点データの中から、予め想定される位置的条件に応じて、速度測定対象車両の特定の一部分に対応する端点データと上記車両の特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを特定し、上記不要部分に対応する端点データを除去した後の端点データを用いて車両の速度を測定するようにしたため、トンネル内照明光源、前方走行車両のテールランプ、速度測定対象車両自体の車体反射光等に相当する不要な端点データが含まれない、すなわち速度測定対象車両を代表する特定の一部分に対応する端点データのみの移動を監視しながら、高精度の速度測定がITVを流用した極めて簡単な構成により実現できる。
【図面の簡単な説明】
第1図は、本発明に係る速度測定システムの一実施例を示すブロック図、第2図は、同速度測定システムにおける端点抽出イメージを表わす概念図、第3図は、ITVカメラを用いた一般的な速度測定システムにおける映像の一例を示す図、第4図は、同映像上においてトンネル内照明用ランプにより発生する車体反射の様子を示す概念図である。
1……ITVカメラ、2……2値化回路、3……同期分離回路、4……タイミング発生回路、5……端点抽出回路、6……座標記憶回路、7……マイクロコンピュータ、10……速度測定対象となる自動車、20……照明用ランプ、30……非速度測定対象となる自動車、40……車体反射発生部。
〔発明の目的〕
(産業上の利用分野)
本発明は、車両の速度測定方式に係り、特にトンネル内を走行する自動車の速度測定方式に関する。
(従来の技術)
一般に、路上を走行する車両の速度を測定する方式としては、レーダを用いる方式や磁気を用いる方式が知られており、これらの方式はいずれも専用のセンサや大規模な処理回路を必要としている。
ところで近年、交通管制のための種々の情報を得る手段として、ITV(Industrial Television)カメラを用いた道路交通状況監視システムが広く利用されている。
特に、高速自動車道などの大規模トンネルには、複数台のITVカメラを設置して成る大規模な監視システムが導入されており、この監視システムを流用して該トンネル内を走行する自動車の走行速度を測定しようとするシステムも実用化されている。
この種の速度測定システムは、トンネル内では自動車がテールランプを点灯して走行することを前提として第3図3図に示す如くの映像に対応してITVカメラから得られる映像信号を2値化し、トンネル内を走行する自動車10のテールランプに対応した2値化データの端点を抽出するとともに、該端点の2値化データにもとづき前記自動車10の走行速度を算出するものである。
このようにITVカメラを用いた速度測定システムでは、前述した各方式とは異なり、専用のセンサを必要とせず簡略な構成で済むうえ、速度情報以外にも交通管制上必要な各種の情報を収集することができる。
しかしながら通常トンネル内は、常時、照明用ランプ20で照明されていたり、速度測定対象外の自動車30が走行していたりすることから、前記ITVカメラの映像(第3図3図参照)上に、前記照明用ランプ20による第4図に示す如くの態様の車体反射発生部40や速度測定対象外の自動車30のテールランプが混在するケースが少なくない。
係る状況において、前記ITVカメラから得られる映像信号を2値化すると、該映像信号の前記車体反射発生部40や前記自動車30のテールランプに対応する部分が、速度測定上の基準となる特定部分すなわち前記自動車10のテールランプに対応する部分と同様に2値化され、それぞれの端点を検出されることになる。
このような場合、従来の速度測定方式では、速度測定対象である自動車10のテールランプに対応した端点の2値化データのみを抽出することができず、前記自動車10の速度を正確に測定することができなかった。
(発明が解決しようとする問題点)
このように上記従来の速度測定方式では、速度測定上の基準となる特定部分に対応する端点と、該特定部分以外の不要部分に対応する端点とが混在するような状況下では、前記特定部分に対応する端点の2値化データのみを抽出して速度測定対象である車両の正確な速度を測定することができないという問題点があった。
本発明は上記実情に鑑みてなされたものであり、速度測定上の基準となる特定部分に対応する端点と、不要部分に対応する端点とが混在する場合においても、前記特定部分に対応する端点の2値化データのみを抽出することができ、速度測定対象である車両の正確な速度測定に寄与し得る速度測定方式を提供することを目的とする。
〔発明の構成〕
(問題点を解決するための手段)
本発明は、速度測定対象となる車両を撮像する撮像手段と、該撮像手段から出力される映像信号を2値化する2値化手段と、該2値化手段から出力される2値化データ中のある輝度以上の画素に対応する端点を抽出する端点抽出手段と、該端点抽出手段により抽出された端点データ中の前記車両の特定の一部分に対応する端点データと前記車両の前記特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを予め想定される位置的条件に基づいて特定し、前記不要部分に対応する端点データを不要データとして除去する不要データ除去手段とを具備し、前記不要データ除去後の端点データを用いて前記車両の速度を測定することを特徴とする。
(作 用)
本発明の速度測定方式では、基準となる特定部分に対応する端点とともに混在する他の端点、例えばトンネル内照明用ランプによる車両の車体反射発生部等の不要部分に対応する端点の発生要件を解析し、該発生要件に応じて前記不要部分に対応する端点の2値化データを除去することによって上記目的を達成している。
(実施例)
以下、本発明の実施例を添付図面にもとづいて詳細に説明する。
第1図は、本発明に係る速度測定システムの一実施例を示すブロック図であり、ITVカメラ1、2値化回路2、同期分離回路3、タイミング発生回路4、端点抽出回路5、座標記憶回路6、マイクロコンピュータ7を具備して構成されている。
本発明の速度測定システムは、トンネル内(第3図参照)では自動車10がテールランプを点灯して走行するという前提にもとづき該トンネル内を走行する前記自動車10の速度を検出するものであり、以下に述べる如く動作する。
第1図において、ITVカメラ1により撮像されたトンネル内の映像に対応した映像信号は、2値化回路2に入力され、予め設定されたスレッショルドレベルにより2値化される。
ここで前記スレッショルドレベルは、自動車10のテールランプを速度測定上の基準となる特定部分としている都合上、前記映像信号のうちの前記テールランプに対応する部分が白画信号となり、道路やその他の背景に対応する部分が黒画信号として判定されるように設定されている。
一方、前記映像信号中の同期信号は、前述した2値化処理と同時に同期分離回路3に入力され、水平同期信号(HD)と垂直同期信号(VD)とに分離された後、それぞれタイミング発生回路4に入力される。
そしてタイミング発生回路4は、後述する端点の座標データ作成のためのクロックパルスを、前記同期分離回路3から入力される前記各同期信号に同期させて発生し、該クロックパルスを端点抽出回路5に入力する。
一方、前記2値化回路2で2値化された映像信号は、引き続いて前記端点抽出回路5に入力され、その端点を抽出される。ここで、前記端点は、別にタイミング発生回路4から端点抽出回路5に入力されるXYアドレスにより設定されたXY座標上における前記2値化データのうちの白画信号域の1座標データとして認識される。
こうして端点抽出回路5により抽出された前記端点の座標データは、次いで座標記憶回路6に記憶される。
尚、この座標記憶回路6における端点の座標データの記憶動作は、一定時間間隔t秒毎に行なわれる。
次いでマイクロコンピュータ7は、前記座標記憶回路6に記憶された各端点の座標データのうちの不要データを除去し、前記自動車10のテールランプに対応する端点の座標データのみを抽出しつつ、該端点の前記XY座標上におけるtxn秒間(nは任意の値)の移動量を求め、更に該移動量を実際の路面上における自動車10の走行距離に変換することにより当該自動車10の走行速度を算出する ところで高速道路等のトンネル内におけるITVカメラ1の映像信号を2値化回路2で2値化する際、白画信号として判定される要素としては、前述した速度測定対象となる自動車10のテールランプ以外にも、例えばトンネル内照明用ランプ20による前記自動車10の車体反射発生部40(第4図参照)や該自動車10の前方を走行する別の自動車30のテールランプ等がある。
そしてこれらの各要素は、前記2値化回路2により白画信号として判定された後、端点抽出回路5によりそれぞれの端点を抽出される。
今、例えば第3図に示す如くのITVカメラ1の映像に対し同図に示す如くのXY座標を設定したとすれば、該映像に対する前記端点抽出回路5の端点抽出イメージは、第2図に示される如くとなる。
第2図では、黒点が端点として示されており、a領域が速度測定対象となる自動車10のテールランプに、b領域がトンネル内照明用ランプ20による前記自動車10の車体反射発生部40に、c領域が該自動車10の前方を走行する別の自動車30のテールランプにそれぞれ対応したものである。
そしてこの端点検出イメージが第3図に示す如くの映像に対応するものであることを考えれば、該端点検出イメージについて次のような発生条件をみいだすことができる。
I. トンネル内照明用ランプ20による車体反射発生部40は、第4図に示す如くテールランプの下側には生じない。
従ってYの最大値を持つ端点が速度測定対象となる自動車10のテールランプに相当し、そのうちのX値の小さい端点が左側のテールランプに相当する。
II. 前方を走行する別の自動車30がある場合、該自動車30の左側のテールランプに相当する端点のX値は、速度測定対象となる前記自動車10のテールランプに相当する端点のX値の特定範囲外の値を示す。
前述した速度測定のための前段階処理において前記マイクロコンピュータ7は、座標記憶回路6に記憶された端点の座標データ(第2図参照)のうちの不要データ(同図bおよびc領域に含まれる端点の座標データ等)を除去し、速度測定対象となる自動車10のテールランプに対応する端点(例えば同図a領域内の1端点)の座標データのみを抽出する際に、上記条件I,IIを参照してその処理を行なっている。
尚、本発明の速度測定システムは、既存のITVシステムを流用したものであるため、速度情報以外に、異常走行や渋滞状況など交通管制上有用な情報も提供できるのは言うまでもない。
また速度測定対象となる車両も乗用車に限定されるものではなく、ITVカメラの設置されたトンネル内を走行する機会のある車種全般に対して適用できるものである。
〔発明の効果〕
以上説明したように、本願発明によれば、映像信号から抽出した端点データの中から、予め想定される位置的条件に応じて、速度測定対象車両の特定の一部分に対応する端点データと上記車両の特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを特定し、上記不要部分に対応する端点データを除去した後の端点データを用いて車両の速度を測定するようにしたため、トンネル内照明光源、前方走行車両のテールランプ、速度測定対象車両自体の車体反射光等に相当する不要な端点データが含まれない、すなわち速度測定対象車両を代表する特定の一部分に対応する端点データのみの移動を監視しながら、高精度の速度測定がITVを流用した極めて簡単な構成により実現できる。
【図面の簡単な説明】
第1図は、本発明に係る速度測定システムの一実施例を示すブロック図、第2図は、同速度測定システムにおける端点抽出イメージを表わす概念図、第3図は、ITVカメラを用いた一般的な速度測定システムにおける映像の一例を示す図、第4図は、同映像上においてトンネル内照明用ランプにより発生する車体反射の様子を示す概念図である。
1……ITVカメラ、2……2値化回路、3……同期分離回路、4……タイミング発生回路、5……端点抽出回路、6……座標記憶回路、7……マイクロコンピュータ、10……速度測定対象となる自動車、20……照明用ランプ、30……非速度測定対象となる自動車、40……車体反射発生部。
【特許請求の範囲】
【請求項1】速度測定対象となる車両を撮像する撮像手段と、該撮像手段から出力される映像信号を2値化する2値化手段と、該2値化手段から出力される2値化データ中のある輝度以上の画素に対応する端点を抽出する端点抽出手段と、該端点抽出手段により抽出された端点データ中の前記車両の特定の一部分に対応する端点データと前記車両の前記特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを予め想定される位置的条件に基づいて特定し、前記不要部分に対応する端点データを不要データとして除去する不要データ除去手段とを具備し、前記不要データ除去後の端点データを用いて前記車両の速度を測定することを特徴とする速度測定方式。
【請求項2】撮像手段は、ITVカメラであることを特徴とする特許請求の範囲第(1)項記載の速度測定方式。
【請求項3】速度測定対象となる車両は、トンネル内を走行する自動車であり、特定の一部分は、前記自動車のテールランプであり、不要部分は、前記自動車のトンネル内照明ランプによる車体反射部分または前記自動車の前方を走行する別の車両のテールランプの少なくともいずれか一方であることを特徴とする特許請求の範囲第(1)項記載の速度測定方式。
【請求項1】速度測定対象となる車両を撮像する撮像手段と、該撮像手段から出力される映像信号を2値化する2値化手段と、該2値化手段から出力される2値化データ中のある輝度以上の画素に対応する端点を抽出する端点抽出手段と、該端点抽出手段により抽出された端点データ中の前記車両の特定の一部分に対応する端点データと前記車両の前記特定の一部分以外の少なくとも当該車両の他の部分を含む不要部分に対応する端点データとを予め想定される位置的条件に基づいて特定し、前記不要部分に対応する端点データを不要データとして除去する不要データ除去手段とを具備し、前記不要データ除去後の端点データを用いて前記車両の速度を測定することを特徴とする速度測定方式。
【請求項2】撮像手段は、ITVカメラであることを特徴とする特許請求の範囲第(1)項記載の速度測定方式。
【請求項3】速度測定対象となる車両は、トンネル内を走行する自動車であり、特定の一部分は、前記自動車のテールランプであり、不要部分は、前記自動車のトンネル内照明ランプによる車体反射部分または前記自動車の前方を走行する別の車両のテールランプの少なくともいずれか一方であることを特徴とする特許請求の範囲第(1)項記載の速度測定方式。
【第1図】



【第2図】
【第3図】
【第4図】
【第2図】
【第3図】
【第4図】
【特許番号】第2557350号
【登録日】平成8年(1996)9月5日
【発行日】平成8年(1996)11月27日
【国際特許分類】
【出願番号】特願昭61−195827
【出願日】昭和61年(1986)8月21日
【公開番号】特開昭63−50757
【公開日】昭和63年(1988)3月3日
【出願人】(999999999)株式会社東芝
【参考文献】
【文献】特開昭60−86699(JP,A)
【文献】特開昭61−82170(JP,A)
【文献】特開昭58−100753(JP,A)
【登録日】平成8年(1996)9月5日
【発行日】平成8年(1996)11月27日
【国際特許分類】
【出願日】昭和61年(1986)8月21日
【公開番号】特開昭63−50757
【公開日】昭和63年(1988)3月3日
【出願人】(999999999)株式会社東芝
【参考文献】
【文献】特開昭60−86699(JP,A)
【文献】特開昭61−82170(JP,A)
【文献】特開昭58−100753(JP,A)
[ Back to top ]