
速度測定装置
【課題】 小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる速度測定装置を提供すること
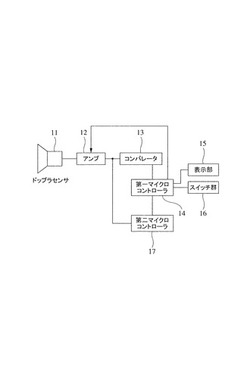
【解決手段】 ドップラー信号を出力するドップラーセンサ11と、ドップラーセンサによって出力されたドップラー信号を基準と比較して二値化するコンパレータ12と、コンパレータの出力に基づいてヘッドスピードを算出する第一マイクロコントローラ14と、ドップラー信号に基づきFFTによりボールスピードを求める第二マイクロコントローラ17と、を備える。さらに、第一マイクロコントローラは、ゴルフクラブのスイングの有無を判別する機能を備え、スイングがあったと判別された場合に、ドップラー信号の蓄積を開始し、FFT処理を行うようにした。
【解決手段】 ドップラー信号を出力するドップラーセンサ11と、ドップラーセンサによって出力されたドップラー信号を基準と比較して二値化するコンパレータ12と、コンパレータの出力に基づいてヘッドスピードを算出する第一マイクロコントローラ14と、ドップラー信号に基づきFFTによりボールスピードを求める第二マイクロコントローラ17と、を備える。さらに、第一マイクロコントローラは、ゴルフクラブのスイングの有無を判別する機能を備え、スイングがあったと判別された場合に、ドップラー信号の蓄積を開始し、FFT処理を行うようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ゴルフクラブのヘッドスピード及びボールスピードを測定する速度測定装置に関するものである。
【背景技術】
【0002】
移動する被測定物の最大速度を測定する速度測定装置として、ドップラーセンサを用いたものが知られている。このドップラーセンサを用いた従来の速度測定装置では、被測定物は等速運動(車両など)あるいは減速運動(投げられたボールなど)をするものを対象としている。そのため、測定を開始してから最初に測定された速度データを最大速度として表示すれば実用上の問題は発生しなかった。これに対し、例えばゴルフクラブ等のスイング運動のように、速度0の状態から急激に加速し、ボールを打撃するポイントで最高速に達するといった被測定物が加速運動をする場合、ドップラーセンサの検知範囲に測定対象物が進入してきた瞬間がスイングの最大速度であるとは限らず、測定開始してから最初に測定された速度を表示する従来の方法ではスイングの最大速度を捕らえられないという問題があった。
【0003】
係る問題を解決するため、従来、特許文献1,2に開示された発明がある。特許文献1に開示されたクラブヘッド速度及びテンポを測定するための小型レーダでは、RFドップラーレーダを用い、速度を測定し続け、先に記憶された速度よりも速い任意の測定速度によって最大速度の記憶値を置き換えることで、速度の最大値を求めている。
【0004】
また、特許文献2に記載のゴルフクラブの運動測定装置は、超音波センサでとらえたドップラー効果で変移した周波数の信号をウェーブレット変換により解析することで速度の最大値を求めている。
【特許文献1】特開2006−326318
【特許文献2】特開2003−210638
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、周辺物体の数、物体との距離、物体の反射面の大きさ・材質・形状等、様々な周囲の環境(状況)の要因により、ドップラーセンサから得られるドップラー信号波形は乱れる。そのため、ドップラー信号に基づいて算出される最大速度が、スイングの実際の最大速度とはならない場合がある。
【0006】
特許文献2に記載の発明では、リアルタイムに計算処理を行う必要があるので高速処理が可能なプロセッサが必要となってしまう。よって、装置の価格が高くなり、消費電力も大きくなるなどコストがかかるという問題がある。また、ウェーブレット変換等の変換を加える方法では、変換を加える都合上、一波ごとの時間分解能が低くなってしまうという問題がある。そのため、測定対象物の瞬時速度データを得るのには適さず、瞬時速度データを用いて、きめ細かい演算処理や判定処理を行うことが困難であるという問題がある。特にヘッドスピードの測定が困難であるという問題がある。また、利用者が実際にボールを打撃した状態のヘッドスピードを測定した場合、速度測定装置は、ボールスピードをヘッドスピードと誤測定してしまう問題がある。
【0007】
また、ドップラーセンサは、マイクロ波を反射する物体の動作を全て検知してしまうので、スイング前の動作(たとえばスイングを終えた測定者が測定結果を確認する為に体を動かす場合など)にセンサが反応し、速度表示が更新されて結果が確認できなくなる等の問題がある。
【0008】
本発明は、小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる使い勝手のよい速度測定装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)上述した目的を達成するために、ドップラー信号を出力するドップラーセンサと、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを複数個蓄積可能な第一蓄積手段と、前記ドップラーセンサによって出力されたドップラー信号に基づき当該ドップラー信号の周期に関するデータを得て前記第一蓄積手段への蓄積を行い、前記第一蓄積手段に蓄積されたデータ群に基づきゴルフクラブのヘッドスピードを算出するヘッドスピード算出手段と、前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積可能な第二蓄積手段と、前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て前記第二蓄積手段への蓄積を行い、前記第二蓄積手段に蓄積されたA/D変換データ群に対する周波数スペクトル解析を行ってボールスピードを算出するボールスピード算出手段とを備える速度測定装置であって、前記ゴルフクラブのスイングがあったか否かを判別するスイング判別手段を備え、前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始し、前記ボールスピード算出手段は、前記スイング判別手段によってヘッドのスイングがあったと判別された場合に、前記第二蓄積手段へのA/D変換データの蓄積を開始する構成とした。
【0010】
本発明によれば、ヘッドスピードはドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積したデータ群に基づいて算出する一方、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積したA/D変換データ群に基づいて算出する。
【0011】
このようにヘッドの速度とボールの速度を分離することで、ヘッドスピードとボールスピードの双方を正確に測定することができる。特に、測定時に測定位置において、ヘッドは加速度運動により速度変化が急峻となる一方、ボールは、ほぼ一定速度とみなすことができるという特性がある。またヘッドの運動によって出力されるドップラー信号のレベルは大きくなる一方、ボールの運動によって出力されるドップラー信号のレベルは小さくなるという特性がある。そのため、本発明のように、ヘッドスピードについては、ドップラー信号の周期に基づいて算出し、ボールスピードについては、ドップラー信号に基づく信号をA/D変換して、周波数スペクトル解析を行って算出すれば、ヘッドスピードと、ボールスピードの双方のスピードを精度のよい値を得ることができる。
【0012】
また、本発明によれば、ドップラーセンサによって出力されたドップラー信号に基づきそのドップラー信号の周期に関するデータを得て第一蓄積手段への蓄積を行い、第一蓄積手段に蓄積されたデータ群に基づきヘッドスピードを算出する。例えば、測定対象物がドップラーセンサの測定可能範囲内に進入してから、測定したい速度(例えば測定対象物がスポーツ用品であればボールへのインパクト付近の最大速度)に達するまでのドップラー信号を2値化(デジタル化)してドップラーパルス信号を得て、ドップラーパルス信号からドップラー信号の周期データを得る。例えばこれらの周期データを全て保持できるだけのメモリを第一蓄積手段として用意しておき、ヘッドスピード算出手段は、測定中、このメモリに周期データを蓄積していく。そして例えば速度算出手段はメモリに蓄積されたこれらの周期データ群に基づいてクラブヘッドのスイング速度(ヘッドスピード)を算出する。
【0013】
本発明のように、ドップラー信号の周期に関するデータを蓄積し、蓄積されたデータ群に基づいてヘッドスピードを算出することで、リアルタイムに計算する場合(特許文献2など)に比べ、ヘッドスピードの測定部を簡略化でき、低コストで小型(携帯等)な装置を容易に実現できる。また、先に記憶された速度よりも速い任意の測定速度によって最大速度の記憶値を置き換えることで速度の最大値を求める従来の方法(特許文献1など)に比べ、蓄積した周期データに基づいてスイング速度を算出するため、ボール等を同時に打撃するスイングの場合におけるボール等の影響も少なく、また、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができる。
【0014】
また本発明によれば、ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始する。このようにすることで、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができ、また蓄積するデータ数を減らすことができる。なお、ドップラー信号の周期が所定値より小さくなったかは、電子回路を用いて判定するようにしてもよいし、前述した周期に関するデータに基づいて判定するようにしてもよい。そして、この所定値は、ヘッドのスイング開始とみなされるときの値とするとよい。この値は、たとえば、実際にヘッドをスイングしているときの値と、ヘッドをスイングしていないときの値とを取得して、両者の値の違いに基づいて設定するとよい。
【0015】
また本発明によれば、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て第二蓄積手段への蓄積を行い、第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行って算出する。この第二蓄積手段へのA/D変換データの蓄積は、スイング判別手段によってヘッドのスイングがあったと判別された場合に開始する。
【0016】
このように蓄積を、ヘッドのスイングがあったと判別された場合に開始することで、常に蓄積する構成にする場合に比べ、必要な第二蓄積手段の容量を減らすことができる。そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0017】
なお、算出したヘッドスピードとボールスピードは、ユーザが認知できるように出力するとよい。たとえば、ヘッドスピード測定装置には出力手段を備え、その出力手段からヘッドスピード算出手段で求めたヘッドスピードと、ボールスピード算出手段で求めたボールスピードを出力するようにするとよい。出力手段はたとえばLEDやLCDなど各種の表示装置としたり、あるいは、スピーカとして音声合成で出力するようにしたりしてもよい。
【0018】
またドップラーセンサは従来から知られている様々なものを用いることができる。たとえば、所定周波数の出力信号を生成する信号生成手段と、前記信号生成手段で生成された前記出力信号を出力する送信アンテナと、前記出力信号の反射波を受信する受信アンテナと、前記受信アンテナで受信された反射波と前記出力信号を周波数混合するミキサと、前記ミキサから出力される混合信号を前記ドップラー信号として出力するドップラーセンサを用いることができる。送信アンテナと受信アンテナは異なるものとすることもできるし、同一のものを用いるようにもできる。このように、たとえば送信波と反射波の差分信号をドップラー信号として出力するドップラーセンサを用いることができる。ドップラー信号としては、この差分信号そのものでもよいし、差分信号に所定の処理を加えたものでもよい。ドップラーセンサとしては、特にマイクロ波ドップラーセンサを用いるとよい。マイクロ波ドップラーセンサによれば、装置自体のセンサ部を開口させたり、透明板を用いたりする必要がなく、装置のデザイン性を損なわずにすむ。
【0019】
また、周期に関するデータとは、周期そのものでもよいし、周波数やその他周期に所定の演算処理を施した値でもよい。例えば周期をパルスに変換しそのパルスの幅(時間)をカウントするパルスカウント方式とするとよい。
【0020】
特に、前記周期に関するデータは、周期の時間に関するデータとするとよく、特に少数の周期(例えば数周期)の時間に関するデータとするとよい。最もよいのは、一周期の時間に関するデータとすることである。すなわち、前記周期は一周期であり、前記周期に関するデータは、一周期の時間に関するデータであること、とするとよい。
【0021】
このようにすれば、測定対象物であるゴルフクラブのヘッドの瞬時速度データを得られる。これにより一波ずつ、きめ細かい演算処理ができる。たしかにS/N的にはFFTやウェーブレット変換のほうが有利である。しかし、ドップラーセンサの監視エリアは、点ではなく空間であるため、ヘッドのスイング速度を測定する場合には、ヘッドだけでなくヘッドをスイングする者の肢体やヘッドに付随する物(例えば、シャフト部分)からの信号が含まれるため、S/Nだけでなく、ドップラー信号に含まれる突発的な不適切波をきめ細かく見極めて除外することの方が、ヘッドスピード測定値の高精度化につながるからである。
【0022】
なお、ボールスピード算出手段における周波数スペクトル解析は、例えば、ウェーブレット変換などによって行うことができる。ただし、下記(2)のようにするとよい。
【0023】
(2)すなわち前記周波数スペクトル解析は、高速フーリエ変換(FFT)で行うと特によい。このようにすれば、ゴルフボールはヘッドに比べ小さく遠い位置になる。このように小さい反射波による小さいレベルのドップラー信号でSN比が不利な入力信号においても、FFTは、周波数分解により、ノイズ成分が周波数全体に分散し、信号成分は線スペクトルとして抽出されるので、解析に充分なSN比を確保することができる。
【0024】
(3)また、前記スイング判別手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別するとよい。ヘッドのスイングに対応する周期パターンは、予め各種のクラブを多数の人でスイングして得た周期パターンと、スイングしていない場合に得られる周期パターンとに基づいて、予め決定しておいてもよいし、例えば、利用者のスイングに対応する周期パターンを学習させて利用するようにしてもよい。
【0025】
(4)そして、前記ボールスピード算出手段は、前記第二蓄積手段へのA/D変換データの蓄積の開始後、所定期間分のA/D変換データの蓄積を行った後、当該A/D変換データの蓄積を終了し、当該蓄積の終了後に、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出するとよい。この所定期間は、ヘッドがボールにヒットしてから測定に必要な時間とするとよい。
【0026】
このようにすれば、第二蓄積手段に必要なA/D変換データの格納領域の大きさを一定の値とすることができ、常時蓄積を行う構成に比べ必要なデータの格納領域の大きさを小さくすることができる。さらに蓄積されたA/D変換データに対する周波数スペクトル解析は、蓄積の終了後に行うため、A/D変換データの蓄積と周波数スペクトル解析を同時に行う構成に比べて処理能力の低い安価な処理装置でボールスピードを的確に測定することができる。所定期間としては、例えば100ms〜200ms程度とするとよい。第二蓄積手段は、例えば、数キロバイト程度のメモリで構成することも可能である。
【0027】
そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0028】
(5)前記ボールスピード算出手段は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とするとよい。このようにすれば、速度測定装置の消費電力を抑えることができる。そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0029】
例えば、ドップラーセンサとスイング判別手段と第一蓄積手段とヘッドスピード算出手段には電力を常に供給する一方、第二蓄積手段とボールスピード算出手段は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、電力の供給を停止し、次に前記スイング判別手段によってヘッドのスイングがあったと判別されたら、電力の供給を再開するようにしてもよい。あるいは、ドップラーセンサとスイング判別手段と第一蓄積手段とヘッドスピード算出手段には電力を常に供給する一方、第二蓄積手段とボールスピード算出手段は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、省電力モードに入り、次に前記スイング判別手段によってヘッドのスイングがあったと判別されたら、省電力モードから通常モードに切り替えるようにしてもよい。
【0030】
(6)測定対象がパターとパター以外のクラブのいずれであるかを設定する測定対象設定手段と、前記ドップラーセンサによって出力されたドップラー信号の増幅を行う増幅手段を備え、前記増幅手段は、前記測定対象設定手段によって前記測定対象としてパターが設定された場合には当該ドップラー信号の通過帯域を、前記測定対象としてパター以外が選択された場合の当該ドップラー信号の通過帯域よりも低い周波数帯域にするとよい。パターのとき、ボールスピードが遅いため、パター以外の場合に比べ、ドップラー信号の通過帯域を、例えば、パター以外の場合の5分の1程度の周波数の通過帯域とするとよい。このようにすれば、クラブがパターの場合でも、パター以外の場合にも、それぞれが必要としない帯域の回路ノイズ等が遮断されるため、ヘッドスピードもボールスピードも的確に測定することができる。
【0031】
(7)上記(1)〜(6)のいずれかに記載の速度測定装置は、携帯可能な筐体に組み込まれ、電池によって駆動される速度測定装置として構成する場合に、特に優れた効果を発揮する。すなわち、(1)〜(6)の発明によれば、回路規模を小さく抑えることができる。例えば、各手段を構成する処理装置に、比較的処理速度が遅く、小型で、安価で、消費電力の少ないものを採用することが容易にできる。そのため速度測定装置を小型で携帯可能な筐体とすることが容易にできるとともに、電池による長時間の駆動を行うことが容易にできる。例えば、周波数スペクトル解析の演算を常時行う必要がなくなり、消費電力を抑えることができる。また、周波数スペクトル解析の演算をリアルタイムに行う必要がなくなるので、CPU等の処理部を高性能のものにする必要がなくなる。よって消費電力やコストを抑えることができる。さらには、例えば、データ蓄積の開始タイミングと終了タイミングが予め規定しておくことで、データ蓄積用のメモリの量を予め定められた量だけ用意すればよくなり、大量のメモリを用意する必要がなくなる。したがって、持ち運び可能な小型かつ電池駆動の速度測定装置とすることが容易にできる。
【0032】
(A)前記ヘッドスピード算出手段は、規定値以上の前記ドップラー信号の周期が検出された場合には、規定値以上の前記ドップラー信号の周期に対応する前記ドップラー信号の周期に関するデータを前記第一蓄積手段に蓄積しないこと、とするとよい。
【0033】
特に、ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記蓄積手段への前記周期に関するデータの蓄積を開始し、蓄積の開始後、規定値以上の前記ドップラー信号の周期が検出された場合には、規定値以上の前記ドップラー信号の周期に対応する前記ドップラー信号の周期に関するデータを前記蓄積手段に蓄積しないようにするとよい。
【0034】
(B)前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積された前記データの個数が所定の基準個数に達した場合に前記ヘッドスピード速度の算出を行うこと、とするとよい。蓄積された複数のデータに基づいてヘッドスピードの算出を行うことで、ノイズや周囲の状況の影響を抑制し、精度良く測定ができる。
【0035】
(C)前記ヘッドスピード算出手段は、前記ドップラーセンサによって得られたドップラー信号の周期が所定値以下になることを待ち、所定値以下になった場合に前記周期に関するデータの前記第一蓄積手段への蓄積を開始し、当該蓄積開始後、前記ドップラー信号の周期が所定値以上になった場合であって、前記第一蓄積手段へのデータの蓄積個数が前記基準個数に達していない場合には、前記ドップラーセンサによって得られたドップラー信号の周期が所定値以下になることを待つ状態へ戻ること、とするとよい。
【0036】
たとえば、ドップラー信号を2値化(デジタル化)したドップラーパルス信号を得る構成において、測定を開始したらドップラーパルスの入力を待ち、ある一定の周波数を超えるドップラーパルスが入力されたらドップラーパルス周期データ蓄積用メモリへのデータ蓄積を開始し、さらに、データ蓄積は開始したものの一定時間ドップラーパルスが入力されない場合、すでに蓄積済みのデータの個数が規定個数を超えていなければ、測定条件不成立とし、再度ドップラーパルス入力を待つ状態に戻るようにするとよい。たとえば、この一定時間は制御手段にタイマを備え、当該タイマでオーバーフローが発生したことで検出するようにしてもよい。
【0037】
このようにすれば、速度の遅い物体の運動、及び、速度は速いがクラブスイングほどに継続性の無い瞬間的な運動の影響を排除することができる。バックスイングは正規スイングよりも遅いので、たとえば、蓄積手段へのデータ蓄積を開始する基準周波数を速度測定に支障が出ない範囲で出来る限り高くする(基準周期を速度測定に支障が出ない範囲で出来る限り低くする)ことで、バックスイング測定もかなりの高確率で回避することが出来る。したがって、ボール等の影響も少なく、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができ、使い勝手のよい速度測定装置を提供することができる。
【0038】
さらに、この(C)の発明のようにすれば、必要な第一蓄積手段の容量を小さくできるとともに、異常なデータを排除することができる。そして、比較的正確な測定結果を安定的に得ることができ、使い勝手のよい速度測定装置を提供することができる。なお、たとえば、前記規定値は、前記所定値よりも大きい値とするとよい。すなわち開始条件となる周期よりも蓄積条件となる周期のほうを長くするとよい。このようにすれば、より的確な測定結果を得ることができる。
【0039】
(D)前記ヘッドスピード算出手段が得る前記周期に関するデータの個数は、測定対象物が前記ドップラーセンサの検知範囲に突入してから測定対象位置に至るまでの距離の間に発生するドップラー信号の波数とすること、とするとよい。
【0040】
例えば測定対象物がゴルフクラブのヘッドである場合、測定対象位置は、ボールが存在した場合にボールにインパクトすると想定される位置となる。この場合、ヘッドスピード算出手段が得る前記周期に関するデータの個数は、ゴルフクラブのヘッドが前記ドップラーセンサの検知範囲に突入してからボールが存在した場合にボールにインパクトすると想定される位置までの距離の間に発生するドップラー信号の波数とするとよい。
【0041】
この(D)の発明によれば、インパクト後の不要な測定データの蓄積を防ぎ、ボールの動きによる誤測定も回避することが可能になる。例えば、測定対象物がゴルフクラブのヘッドである場合、最適な蓄積個数は、ゴルフクラブが検知範囲に突入してからボールが存在した場合にボールにインパクトすると想定される位置までに発生する波の数であるが、これはシャフト長や測定者の身長・腕の長さ、装置位置などの要素により変動するのでこれらを加味して決定するとよい。たとえば、60cmから80cmに相当する波数とするとよい。周期データの蓄積個数は、たとえば、24GHz帯のマイクロ波を用いる場合100個程度とするとよい。
【0042】
(E)前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積候補データとして格納する蓄積候補データ格納手段と、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号に基づき前記蓄積候補データ格納手段に格納された蓄積候補データを、前記第一蓄積手段への蓄積対象にするか否かを判定する判定手段と、を備え、前記判定手段によって蓄積対象データと判定された前記蓄積候補データ格納手段に格納された蓄積候補データを前記第一蓄積手段に蓄積すること、とするとよい。
【0043】
このような構成の場合、例えば「ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合」の判定、「規定値以上の前記ドップラー信号の周期が検出された場合」の判定、「所定値以下になった場合」の判定は、判定手段によって行うようにするとよい。
【0044】
(F)前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積されたデータ群に対して所定の算術的処理を行って前記スイング速度を算出すること、とするとよい。たとえば、蓄積した周期データに算術的処理として移動平均をとる処理を行った後、所定の条件(たとえば最小値)に合致するデータを検索するようにしてもよい。このように、蓄積されたデータの中から、単に最小周期のデータを用いてスイング速度を算出するのではなく、それぞれのデータを前後のデータと比較することで不適切なデータを排除したり、不適切なデータが排除された信頼度の高いデータ群のみで平均化したりすることによる測定値の安定化を図ることができる。
【0045】
(G)上記の(F)の発明を前提とし、さらに前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積されたデータ群のデータの内、ばらつきが所定の許容値よりも大きいデータを除外する除外処理と、当該除外処理によって除外されなかったデータである算術処理対象データに対して所定の算術的処理とを行うものであること、とするとよい。このようにすれば、測定結果の精度をさらに向上させることが可能となる。
【0046】
(H)上記の(G)の発明を前提とし、前記所定の許容値として複数の異なる許容値を設け、相対的に小さな許容値で前記除外処理を行い、その結果、前記算術対象データの個数が所定の個数未満となった場合には、前記相対的に小さな許容値よりも大きな許容値で前記除外処理をしなおすこと、とするとなお良い。
【0047】
すなわち、ばらつきの許容値を変えて、数段階に分けて行うとよい。このようにすれば、ばらつきの少ない周期に関するデータが蓄積されている場合には、より高精度のスイング速度を算出でき、一方、ばらつきの大きなデータが蓄積されている場合には、その中から、ある程度の精度のスイング速度を算出できるので、周期に関するデータがあまりうまく取得できない状況であっても、まったくスイング速度が算出されないという状況を防止することができる。このように周期に関するデータの取得状況に応じた精度を実現でき、使い勝手もよいスイング速度算出装置を実現できる。
【0048】
(I)測定対象物の移動方向を検出する移動方向検出手段を備え、前記第一蓄積手段は、前記移動方向検出手段によって検出された移動方向がスイング方向でない場合には、前記周期に関するデータを蓄積しないこと、とするとよい。
【0049】
上述したように、本発明に用いるドップラーセンサとしては種々のものとすることができるが、たとえば1出力タイプのドップラーセンサでは、物体が近づいているのか遠ざかっているのかが判別できない。そのため、たとえばバックスイング時のように、正規のスイングでない場合であってもデータを蓄積してしまうことがあり、誤った速度をスイング速度として得てしまう場合がある。そこで、この(I)の発明のようにすれば、正規の移動方向のデータのみを第一蓄積手段に蓄積することで、バックスイング時のように、正規のスイングでない場合の影響を低減することができる。なお、移動方向検出手段としては、たとえば2出力タイプのドップラーセンサを用い、その2出力タイプのドップラーセンサの2つの出力の位相の差に基づいて、移動方向がスイング方向であるか否かを検出する構成とするとよい。
【0050】
(J)前記ヘッドスピード算出手段によって算出されたヘッドスピード及び前記ボールスピード算出手段によって算出されたボールスピードを表示する表示手段を備え、前記表示手段は、前記ヘッドスピードまたはボールスピードが算出された後、所定時間の間、当該スピードの表示を点滅表示すること、とするとよい。
【0051】
このようにすれば、スピードの計測が成功したか否かをユーザは点滅表示がされたか否かでわかる。またスピードの計測に成功したことを表示するための別の表示領域も不要であり、表示の駆動に大量の入出力回路や配線が必要となってしまうこともない。したがって、低コストで、小型化(携帯等)が可能な、使い勝手のよい速度測定装置を提供することができる。
【0052】
(K)またヘッドスピード算出手段によって算出されたヘッドスピードと、ボールスピード算出手段によって算出されたボールスピードに基づいてミート率を算出して表示するとよい。ミート率は、ボールスピード/ヘッドスピードで算出する。
【0053】
(L)さらに、クラブの選択機能を備え、ヘッドスピード算出手段によって算出されたヘッドスピードまたはボールスピード算出手段によって算出されたボールスピードの少なくともいずれか一方により、推定飛距離を算出し表示するとよい。また、例えば、クラブの素振りの場合など、ボールスピード算出手段によってボールスピードに相当するスピードが検出されなかった場合、ボールなしのスイングであると判定して、算出されたヘッドスピードに基づいて、推定飛距離を算出し表示するようにしてもよい。このようにすれば、ボールがある場合もない場合にも、推定飛距離を知ることができる。なお、推定飛距離の算出は、例えば、ヘッドスピードに対するクラブ種ごとの係数と、ボールスピードに対するクラブ種ごとの係数とを、実測値に基づいて求めて予め記憶しておき、これらの記憶されたこれらの係数と測定したスピードとを乗算して、求めるとよい。ヘッドスピードに基づいて求めた推定飛距離と、ボールスピードに基づいて求めた推定飛距離のいずれを、出力する推定飛距離とするかは、予め決定した所定のルールに基づいて決定するようにしてもよいし、両者の推定飛距離間で所定の演算(例えば平均値)を行って出力する推定飛距離を算出するようにしてもよい。
【発明の効果】
【0054】
本発明によれば、小型で、安価で、消費電力が少なく、比較的正確なヘッドスピードとボールスピードの双方の測定結果を安定的に得ることができる使い勝手のよい速度測定装置を提供できる。
【発明を実施するための最良の形態】
【0055】
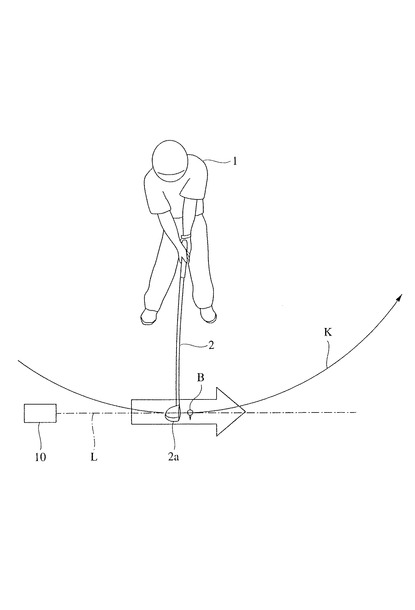
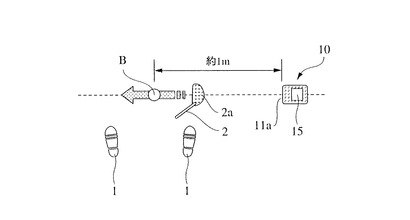
図1,図2は、本発明の速度測定装置であるゴルフクラブのヘッドスピード測定装置の利用状態の一例を示す図である。図に示すように、ゴルフクラブのヘッドスピード測定装置10は、ゴルフクラブ2をスイングするゴルファー1の後方所定位置に設置する。具体的な設置位置は、ゴルフクラブのヘッドスピード測定装置10の検知範囲が、スイング中のゴルフクラブ2のヘッド2aが最大速度で移動する地点を含むような位置である。一例としては、図1に示すように、ゴルフクラブ2のヘッド2aの移動軌跡Kの最下点付近がボールBに対するインパクト位置となり、通常、当該位置付近でヘッド2aの移動速度は最大速度になるため、係る移動軌跡Kの最下点の接線L上であり、かつ、ゴルファー1の後方を設置位置とする。本実施形態では、ボールBとゴルフクラブのヘッドスピード測定装置10との距離は、厳密に決める必要はないが、バックスイング時にゴルフクラブ2がゴルフクラブのヘッドスピード測定装置10に当たらない位置とする。たとえば、ボールBとゴルフ支援装置10との距離は、約1mとする。後述するように、このゴルフ支援装置10には、ドップラーセンサが内蔵されているため、ドップラーセンサのアンテナの開口面11aが、ボールBに正対する(接線L上を向く)ように設置される。なお、本実施形態では、ゴルフクラブのヘッドスピード測定装置10は、ゴルフクラブ2をスイングするゴルファー1の後方所定位置に設置するものとして説明する。なお、使用するクラブは、ウッド・アイアン・パター等何でも良い。
【0056】
なお、図ではボールBをおき、実際にゴルファー1がボールBを打つように描画したが、本実施形態では、ボールBは無くても良い。つまり、ヘッドスピード測定装置10は、ボールBをおいて実際に打った場合には、そのスイングする毎にヘッドスピードとボールスピードの両者を同時に測定し、ボールBを置かない(置いていても実際に打たない)で素振りをした場合にはヘッドスピードのみ測定する。
【0057】
なおまた、図2は、ゴルファー1が右打ちの場合の例を示しており、左打ちのゴルファーの場合には、左右を反転した状態に設置することで対応できる。つまり、本実施形態のゴルフ支援装置は、右打ち/左打ちのいずれにも対応できる。
【0058】
図3は、ゴルフ支援装置10の外観を示す平面図であり、図4は、その内部構成を示すブロック図である。図3に示すように、ゴルフ支援装置10は、防水加工(防水構造)が施された扁平な矩形の筐体20の内部に、図4に示す各構成要素を収納して構成される。構成要素の一部は、筐体20の外部に露出する。
【0059】
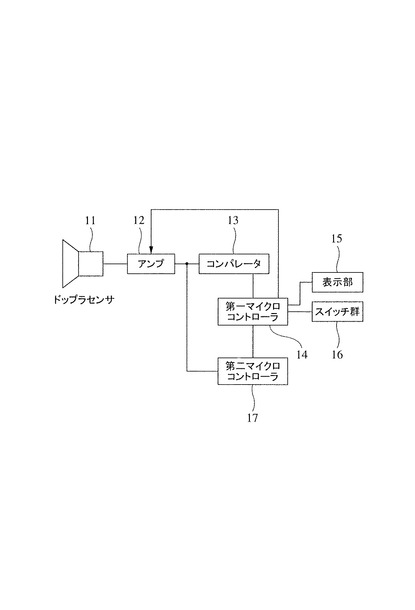
図4に示すように、ゴルフクラブのヘッドスピード測定装置10は、出力周波数が24.15GHzのマイクロ波ドップラーセンサ11と、当該ドップラーセンサの出力信号(1波がゴルフクラブのヘッドの6mmの移動に相当する信号)を増幅するアンプ12と、アンプ12によって増幅された信号を基準値と比較し、ドップラーパルス(基準値以上の場合にハイレベルで基準値より小さい場合にはローレベルの信号)を出力するコンパレータ13と、コンパレータ13から出力された信号を入力してスイング速度(ヘッドスピード)を求める第一マイクロコントローラ14と、上記のアンプ12から出力される信号(ドップラーセンサ11から出力されたドップラー信号を増幅した信号)を入力してボールスピードを求める第二マイクロコントローラ17と、第一マイクロコントローラ14からの制御によってスイング速度等の表示を行う表示器15と、第一マイクロコントローラ14に接続されたスイッチ群16と、を備える。表示器15には、第二マイクロコントローラ17で求めたボールスピードも表示される。表示器15は、LCDや有機ELディスプレイ等から形成される。スイッチ群16は、電源スイッチと、モード切替スイッチとからなる。
【0060】
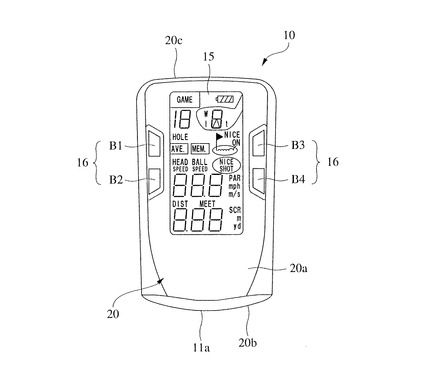
図3に示すように、筐体20の前面20bがアンテナの開口面11aとなり、筐体20の後面20cにはマイクロSDカードスロットが設けられている。また、筐体20の裏面(下面)側には、電池収納部が設けられる。また、表示器15並びにスイッチ群16は、筐体20の上面に露出する。スイッチ群16は、本実施形態では、パワーボタンB1と、モードセレクトボタンB2と、クラブセレクトボタンB3と、ファンクションボタンB4の4つの操作ボタンを備えている。各操作ボタンB1〜B4が押下されると、その押下されたことが第一マイクロコントローラ14に伝えられ、第一マイクロコントローラ14が所定の処理を行う。
【0061】
パワーボタンB1は、ヘッドスピード測定装置10の電源のオン/オフを制御するためのもので、長押しにより、装置電源のオン/オフの切り替えを行うためのボタンである。第一マイクロコントローラ14は、装置の電源が切れている状態で、パワーボタンB1が長押しされたことを認識すると、電源をオンにし、装置の電源が入っている状態で、パワーボタンB1が長押しされたことを認識すると、電源をオフにする制御を行う。
【0062】
モードセレクトボタンB2は、モード切り替え指示をするためのボタンである。本実施形態のヘッドスピード測定装置10は、1スイングごとに、スイングに伴う諸特性を測定して表示する“測定モード”と、仮想ゴルフコースを想定して、ゲーム感覚で仮想ゴルフコースを回ることができる“トレーニングモード”とを有している。そこで、マイクロコントローラ14は、このモードセレクトボタンB2が“長押し”されたことを認識すると、“測定モード”と“トレーニングモード”を交互に切り替える。そして、マイクロコントローラ14は、現在のモードが“トレーニングモード”の場合、表示器15の左上隅に”GAME”のロゴを表示し、“測定モード”の時は、”GAME”のロゴを表示しない。よって、ユーザは、”GAME”のロゴの表示の有無により、現在トレーニングモード中か測定モード中かを認識することができる。また、測定モードの状態で実際のゴルフ場でプレイをしながら、そのプレイ中の各ショット(スイング)を測定して記録することで、実際のプレイの記録を行うことができる。
【0063】
また、測定モードで求めることができる諸特性は、“ヘッドスピード”,“ボールスピード”,“推定飛距離”,“ミート率”である。ヘッドスピード並びにボールスピードは、ドップラーセンサの出力に基づいて求める。なお、トレーニングモードは、記憶保持している仮想ゴルフ場(コース)の地図データ(ティーグランドからカップまでの距離,OB・ウォーターハザード等のペナルティゾーンの位置等)を読み出し、ゴルフクラブのスイングに伴うヘッドスピード或いはボールスピードから推定飛距離を算出し、カップまで残り距離を求めるとともに、その求めた残り距離やそれまでの打数を表示器15に表示し、最終的にカップイン(残り距離がしきい値以下)になるまで繰り返すものである。
【0064】
本発明では、係るトレーニングモードと測定モードを両方備える必要はなく、例えば、測定モードのみでも良い。また、逆に、トレーニングモードのみの装置とした場合でも、仮想ゴルフ場をプレイする際に行うスイングする都度、上記の諸特性を求めるようにしても良い。
【0065】
次に、諸特性を求める機能について説明する。まず、パワーボタンB1の長押しにより電源がONされると、内部回路に電源が投入され、ドップラーパルスがコンパレータ13から第一マイクロコントローラ14に入力される。
【0066】
第一マイクロコントローラ14は、ゴルフクラブのヘッドスピードの測定処理を行う。ヘッドスピードの測定処理は、「ドップラーパルス周期の測定と蓄積」と、「速度算出」の2つの処理で構成される。本装置ではゴルフクラブのスイング時におけるヘッドスピードの速度測定に特化するため、スイング開始から終了までの速度データをいったん蓄積し、その後蓄積されたデータからスイングの最大速度を算出する。これらの処理の具体的内容について次に説明する。
【0067】
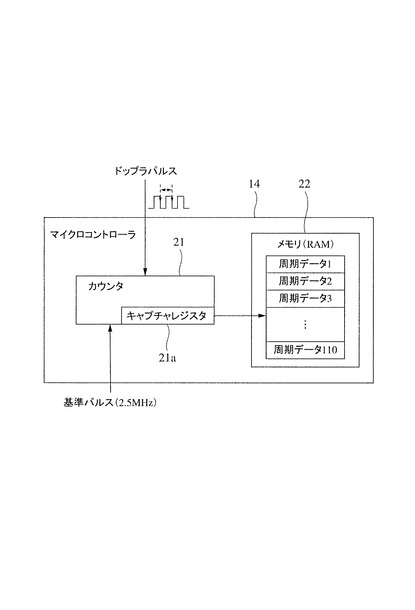
図5に示すように、第一マイクロコントローラ14は、16ビットのカウンタ(タイマ)21と、第一蓄積手段たるメモリ(RAM)22とを有する。カウンタ21には、基準パルスとして2.5MHzの信号が入力され、カウントが行われる。カウンタ21の値は、所定のイベント発生時にキャプチャレジスタ21aに取り込むことができる。メモリ22内には、周期データを格納する周期データ格納領域が設けられ、この領域は、16ビット幅で110個の配列領域(計220バイト)からなる。
【0068】
第一マイクロコントローラ14には、コンパレータ13から出力されたドップラーパルスが入力される。第一マイクロコントローラ14は、このドップラーパルスの周期を測定する。この周期の測定にはカウンタ21を利用する。具体的には、前記所定のイベントとしてドップラーパルスの立下りが発生した場合に、ドップラーパルスの立下り検出割り込みを発生させるとともに、そのときのカウンタ値をキャプチャレジスタ21aに取り込むよう設定しておく。キャプチャレジスタ21aは、蓄積候補データを格納するものである。そして、ドップラーパルスの立下り検出割り込み発生時には、割り込み処理ルーチンでキャプチャレジスタ21aの内容を周期データとしてメモリ22に記録する。
【0069】
カウンタ21でカウンタ値のオーバーフローが発生した場合には、カウンタオーバーフロー割り込みが発生する。カウンタオーバーフロー割り込みが発生した場合には、カウンタオーバーフロー割り込み処理を行う。
【0070】
第一マイクロコントローラ14が実行する各処理では、測定状態(処理状態)として「開始待ち」,「測定中」,「完了」,「エラー」を規定しており、それぞれの状態はメモリ22上に設定された状態記憶領域に記憶し、この記憶された状態に基づいて処理内容をかえる。状態「開始待ち」は、初回ドップラーパルスの立下りを待っている状態である。リセット直後(電源投入直後)はこの状態とし、ドップラーパルスの立下りを検出し、その周期が規定値以下の場合に、状態「測定中」へ移行させる。状態「測定中」は、周期データを蓄積している状態である。状態「完了」は、周期データの蓄積が完了し、有効な測定データ数が規定値を超えている状態である。この状態になったときには、蓄積データを検査して速度の算出を行う速度算出処理を行う。状態「エラー」は、周期データの蓄積が完了したが、蓄積されたデータ数が規定に満たない状態である。この状態になったら直ちに蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行う。
【0071】
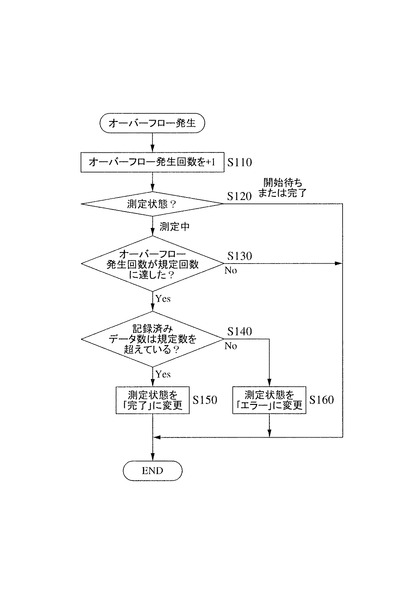
まず、第一マイクロコントローラ14が実行するカウンタオーバーフロー割り込み処理機能を、図6のフローチャートを参照して説明する。カウンタ21は16ビットであるので、カウンタ値が65535+1になったときに、カウンタオーバーフロー割り込みが発生し、この処理を開始する。
【0072】
まず、S110(S110はステップ110の略表記であり、以下同様に表記する。)では、メモリ上に保持しているオーバーフロー発生回数を+1する。続くS120では、測定状態が「開始待ち」または「完了」か、「測定中」であるかを判定する。測定状態が「開始待ち」または「完了」の場合には(S120:開始待ちまたは完了)、この処理を終了する。一方、測定状態が「測定中」の場合には(S120:測定中)、S130へ移行する。S130では、オーバーフロー発生回数が規定回数に達したか否かを判定する。この規定回数は16回に設定している。オーバーフローが16回発生するということは、約400msの長時間にわたってパルスの立下りが入力されないということであり、このような場合には、「測定中」の状態を抜ける必要性があるからである。オーバーフロー発生回数が規定回数に達していない場合(S130:No)、カウンタオーバーフロー割り込み処理を終了する。一方、オーバーフロー発生回数が規定回数に達した場合(S130:Yes)、S140へ移行する。S140では、記録済みデータ数(図3に示す周期データの記録数)が規定数を超えているか否かを判定する。この規定数は“32”に設定している。記録済みデータ数が規定数を超えている場合には(S140:Yes)、S150に移行して、S150で測定状態を「完了」に変更して、この割り込み処理を終了する。一方、記録済みデータ数が規定数を超えていない場合には(S140:No)、S160に移行して、S160で測定状態を「エラー」に変更して、この割り込み処理を終了する。
【0073】
このような処理により、オーバーフロー発生時にオーバーフロー発生回数をカウントするとともに、オーバーフロー発生回数が16回といった異常な状態が発生した場合、そこで測定を中止し、記録済みデータが規定数を超えている場合には測定状態を「完了」に変更して後述する図5に示す速度算出処理を行うのに対し、記録済みデータが規定数を超えていない場合には測定状態を「エラー」に変更し、蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行う。
【0074】
次に、ドップラーパルスの立下り割り込み発生時のドップラーパルスの立下り割り込み処理(ドップラーパルス周期の測定と蓄積処理)の内容を、図7,図8を参照して説明する。
【0075】
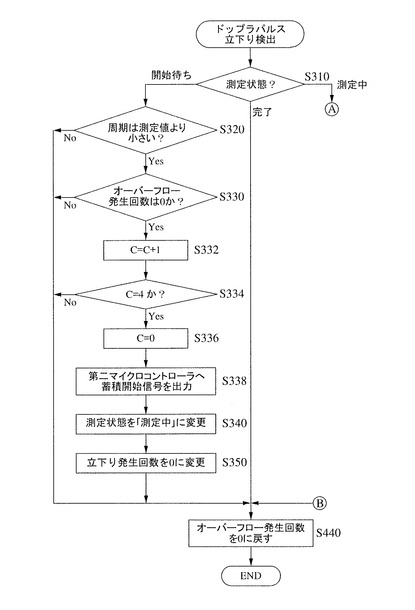
第一マイクロコントローラ14は、ドップラーパルスの立下りを検出すると図7,図8に示すドップラーパルスの立下り割り込み処理を開始する。まずS310で、測定状態が、「開始待ち」であるか「完了」であるか「測定中」であるかを判定する。「開始待ち」の場合には(S310:開始待ち)S320へ移行し、「完了」の場合には(S310:完了)S440へ移行し、「測定中」の場合にはS360へ移行する。
【0076】
S320では、周期が規定値より小さいか否かを判定する。規定値としては、たとえばゴルフヘッドのヘッドスピードが20m/sに相当する周期である約0.31msに相当するカウント値である776回に設定している。すなわち、具体的には、キャプチャレジスタ21aの値がこの規定値より小さいか否かを判定する。周期が規定値より小さい場合(カウント値が776回より小さい場合)には(S320:Yes)、S330へ移行し、周期が規定値以上の場合(カウント値が776回以上の場合)には(S320:No)、S440へ移行する。S330では、オーバーフロー発生回数が0か否かを判定する。0の場合(S330:Yes)、S332へ移行し、0でない場合(非0)(S330:No)、S440へ移行する。
【0077】
S332では、Cを“+1”インクリメントし、S334では、そのインクリメントした新たなCの値が4か否かを判断する。Cの値が4でない、つまり、1から3の場合(S334:No)、S440へ移行し、Cの値が4の場合、C=0にリセットし(S336)したのち、S338に移行する。S338では、第一マイクロコントローラ14は、第二マイクロコントローラ17へ蓄積開始信号を出力する。換言すると、周期が測定値より小さい状態(S320がYes)で、オーバーフローが発生していない(S330がYes)ことが4回発生することで、スイングがされたと判断でき、上記の蓄積開始信号が出力される。このS320〜S338の処理ステップを実行する機能が、スイング判別手段を構成する。
【0078】
このスイング判別手段は、ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別(最終的にS334でYes)している。そして、ヘッドのスイングに対応する周期パターンは、予め各種のクラブを多数の人でスイングして得た周期パターンと、スイングしていない場合に得られる周期パターンとに基づいて、予め決定しておいてもよいし、例えば、利用者のスイングに対応する周期パターンを学習させて利用するようにしてもよい。
【0079】
第一マイクロコントローラ14は、この蓄積開始信号を出力した後、S340に移行する。このS340では、測定状態を「測定中」に変更して、S350へ移行する。S350では、メモリ22上に記憶された立下り発生回数を0に変更する。このようにして、ドップラーセンサ11によって出力されたドップラー信号の周期が所定値より小さくなった場合に、メモリ22への周期データの蓄積を開始する設定を行う。したがって、次のドップラーパルス立下り時の割り込み処理では、S310で「測定中」と判定され、S360以降の処理を行うこととなる。
【0080】
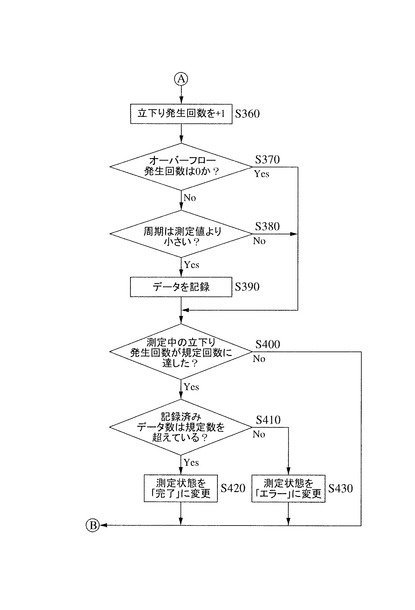
S360では、メモリ上に記憶された立下り発生回数を+1する。続くS370では、オーバーフロー発生回数は0か否かを判定する。オーバーフロー発生回数が0の場合には(S370:Yes)S400へ移行し、オーバーフロー発生回数が0でない場合には(S370:No)S380へ移行する。
【0081】
カウンタ21は16ビットであるので、カウント値が65535を超えるとオーバーフロー割り込みが発生し、オーバーフロー割り込み処理で、オーバーフロー発生回数がインクリメントされることとなる(図4のS110)。カウント値65535は、約26msに相当し、測定対象の値(周期)よりも十分に長いため、オーバーフローが発生すれば、この周期データの記録は行わなくてよいと判断している。
【0082】
S380では、周期が規定値より小さいか否かを判定する。具体的には、キャプチャレジスタ21aの値がこの規定値より小さいか否かを判定する。この規定値は、S320の規定値と同じ776回に設定している。周期が規定値より小さい場合(カウント値が776回より小さい場合)には(S380:Yes)、S390へ移行し、周期が規定値以上の場合(カウント値が776回以上の場合)には(S380:No)、S400へ移行する。S390では、データをメモリ22に記録する。すなわち、キャプチャレジスタ21aの値をメモリ(RAM)22上の配列へ記憶し(前回記録したデータがある場合、前回記憶した配列内の領域の次の領域に記録する)(図5参照)、S400へ移行する。
【0083】
S400では、測定中の立下り発生回数が規定回数に達したか否かを判定し、規定回数に達した場合には(S400:Yes)、S410へ移行し、規定回数に達していない場合には(S400:No)、S440へ移行する。この規定回数(“波数”に相当)は、110回に設定している。この110回は、「測定対象物が前記ドップラーセンサの検知範囲に突入してから測定対象位置に至るまでの距離」として、6mm×110回=66cmに相当する。
【0084】
S410では、メモリ22上の配列への記録済みデータ数が規定数を超えているか否かを判定し、規定数を超えている場合には(S410:Yes)、S420へ移行して、S420で、測定状態を「完了」に変更して、この割り込み処理を終了する。一方、規定数を超えていない場合には(S410:No)、S430へ移行して、S430で、測定状態を「エラー」に変更して、この割り込み処理を終了する。S410での記録済みデータ数の規定数は、“32”に設定している。すなわち、S370の処理においてオーバーフローが発生したと判定された場合(S370:Yes)やS380で周期が規定値以上と判定された場合(S380:No)には、S390の処理は行わず、周期データの配列(メモリ22)への記録をしないので、記録済みデータの個数は110個未満となる場合がある。この場合、後述する図9の速度算出処理に必要な個数として32個に設定しており、この個数を超えている場合には(S410:Yes)、測定状態を「完了」として、速度算出処理を行わせるのに対し、この個数を超えていない場合には(S410:No)測定状態を「エラー」に変更して蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行わせるようにする。
【0085】
以上のようなドップラーパルスの立下り検出割り込み処理によって、測定状態が「完了」の場合には、速度の算出対象となる周期に関するデータがメモリ(配列)22に33個以上蓄積されることとなる。
【0086】
次に、速度算出処理について、図9を参照して説明する。速度算出処理は、測定状態が「完了」となった場合に開始する。
【0087】
S510では、メモリ22に蓄積された周期データのうち、先頭から蓄積個数までのデータの移動平均を算出し、メモリ(RAM)22に算出結果を格納する。具体的には、周期データ1〜周期データ4の4つのデータで相加平均を求めて、メモリ(RAM)22内の移動平均格納用配列に格納する。つづいて、周期データ2〜周期データ5の4つのデータで相加平均を求めて、メモリ22内の移動平均格納用配列に移動平均周期データとして格納する。以下同様に周期データの相加平均を求めてRAM内の移動平均格納用配列に順次格納する。
【0088】
次に、ばらつきの大きいデータを除外する。すなわち、S510で移動平均の算出に使用された4つの元データの全てが平均値±n%の範囲内にない場合には、そのデータはばらつきが大きいデータ(すなわち測定値の信用性が低いデータ)とみなして、その元データから算出された移動平均値を以降の処理から除外する。
【0089】
具体的には、S520でまず前記nの値を12.5%として、4つの元データの全てが平均値±12.5%の範囲内にない場合には、そのデータはばらつきが大きいデータとみなして、その元データから算出された移動平均値に対して除外フラグをセットする。除外フラグは、例えば移動平均格納用配列に対応する形式で1つの移動平均周期データについて1ビットのメモリ領域を割り当てる。
【0090】
続くS530では、S520での除外処理の結果、除外フラグがセットされていないデータ数(有効データ数)が10個未満の場合には(S530:Yes)除外フラグを解除した後、S540へ移行する。
【0091】
S540では前記nの値を今度は25%として、4つの元データの全てが平均値±25%の範囲内にない場合には、そのデータはばらつきが大きいデータとみなして、その元データから算出された移動平均値に対して除外フラグをセットする。
【0092】
続くS550では、S520での除外処理の結果、除外フラグセットされていないデータ(有効データ数)が10個未満か否かを判定し、10個未満の場合には(S550:Yes)、S560へ移行する。S560では、測定状態を「エラー」に設定して、この処理を終了する。一方、除外フラグセットされていないデータ(有効データ数)が10個以上の場合には(S550:No)、S570へ移行する。また、S530で、除外フラグセットされていないデータ数(有効データ数)が10個以上の場合にも(S550:No)、S570へ移行する。
【0093】
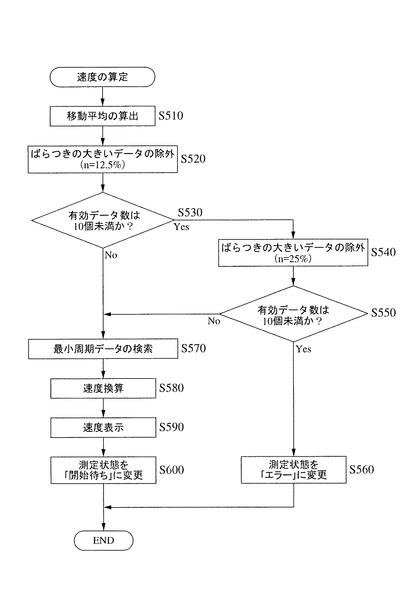
S570では、最小周期データ(周期の最小値=周波数の最大値=最大速度に相当するもの)を、除外フラグのセットされていない移動平均周期データの中から検索する。続くS580では、S570で得られた最小周期データから速度(ヘッドスピード)を算出する。速度の算出は以下の(式1)に基づいて行う。
【数1】

(v:ヘッド速度、c:光速(299792485m/s)、fb:カウンタの基準パルス周波数、f0:マイクロ波ドップラーセンサ出力周波数(24.15GHz)、nmin:最小周期データの値)
【0094】
続くS590では、S580で求めたヘッドスピードを表示器に表示する。たとえば、50.0m/sのように表示する。このとき表示開始から10秒間は、ヘッドスピードの表示を点滅表示させる。10秒間の点滅表示処理が完了したら、S580で求めたヘッドスピードを点灯表示として、S600へ移行する。
【0095】
続くS600では、測定状態を「開始待ち」に変更する。
【0096】
このような構成により、利用者は表示器を見ることで、ヘッドスピードを知ることができる。すなわち、図1に示すように、利用者であるゴルファー1は、ゴルフクラブのヘッドスピード測定装置10を所定位置にセットすると共にスイッチ群16を操作して電源を投入する。次いで、その状態でゴルファー1はゴルフクラブ2のスイングをする。このとき、ボールBをティーアップなどして実際に打ってもよいし、ボールをセットせずに素振りを行っても良い。
【0097】
スイングに伴い、ゴルフクラブ2のヘッド2aがドップラーセンサ11の検知範囲に入ると、そのヘッド2aの移動速度に応じた周期のドップラーパルスが第一マイクロコントローラ14に入力され、それに基づき、各周期のデータがメモリ22に蓄積され、その後、最大速度が計測される。そして、正しく計測が行われた場合、求められたヘッドスピード(瞬間最大速度)が、表示器15に点滅状態で表示される。一方、何らかの原因により正しく計測できなかった場合には、速度表示がされない。よって、利用者は、スイング後に表示器15を見ることで、速度が点滅状態で表示されているか否かにより、計測できたか否か並びに計測できた場合にはその速度を知ることができる。
【0098】
次に、第二マイクロコントローラ17の機能を説明する。第二マイクロコントローラ17は、上記のS338の実行に伴い第一マイクロコントローラ14から蓄積開始信号を受けた場合、アンプ12から出力されたドップラー信号(増幅された信号)を第二マイクロコントローラ17に内蔵するA/D変換器によって、デジタル信号に変換して、内蔵するメモリ(RAM)に160ms分取り込んで蓄積する。取り込みが完了したら、蓄積したメモリ内のデータに対してFFTによる演算を行って速度を算出する。FFTによる演算を行って速度を算出する方法としては、スピードガン等に使用されている公知の方法を用いればよい。そして、算出した速度のデータを、第一マイクロコントローラ14へ送る。
【0099】
すなわち、ゴルフクラブ2のスイングに伴うヘッド2aの移動速度は、スイング開始から徐々に速度が早くなり、ボールに当たる前後付近で最大速度になり、その後、徐々に遅くなる。一方、ボールBは、ゴルフクラブ2のスイング開始当初は、停止したままであるため移動速度は0となり、ヘッド2aが当たって打ち出されることで、移動するため速度が増速する。そして、ヘッドスピードの速度変化のピークと、ボールスピードの速度変化のピークとは、ずれがある(ボールスピードのピークが遅れて発生する)。そこで、スイング判定手段(S320からS328を実行する処理アルゴリズム)にて、ゴルフのスイングを検出して第一マイクロコントローラ14が蓄積開始信号を出力してから、第二マイクロコントローラ17にてボール速度の算出に必要なドップラー信号(アンプ12で増幅した信号)を記録する。
【0100】
これにより、ヘッドスピードはドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積したデータ群に基づいて算出する一方、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積したA/D変換データ群に基づいて算出する。このようにヘッドの速度とボールの速度を分離することで、ヘッドスピードとボールスピードの双方を正確に測定することができる。
【0101】
さらに第一マイクロコントローラは、第二マイクロコントローラから速度のデータが送られてきた場合、その速度をボールスピードとして表示器15に表示するとともに、自己の算出したヘッドスピードでそのボールスピードを除算した値をミート率として表示器に表示する。
【0102】
すなわち、第一マイクロコントローラ14は、
ミート率=ボールスピード/ヘッドスピード
によりミート率を算出する。
【0103】
また、推定飛距離は、実際にボールを打った場合には、ボールスピードと使用したクラブ種から飛距離を求め、素振りの場合にはヘッドスピードと使用したクラブ種から飛距離を求める。具体的には、予めクラブ種ごとにボールスピードに対する係数とベッドスピードに対する係数を設定しておき(クラブ種−係数のテーブル等を設ける)、ボールスピード或いはヘッドスピードに、クラブ種に対応する係数を乗じた値を推定飛距離とする。なお、ボールの有無は、マニュアル操作による手動によって指定しても良いし、各種のセンサを設け装置により自動的に認識するようにしてもよい。
【0104】
また測定モードの場合、モードセレクトボタンB2の“短押し”により、表示パラメータの選択を行う。すなわち、図3に示すように、表示器15の下方領域に、7セグメントを利用した3桁の数値表示部位を2列用意し、上段をスピード(ヘッドスピード/ボールスピード)、下段を“推定飛距離”か“ミート率”のいずれかを表示する。よって、表示パターンとしては、“ヘッドスピード&推定飛距離”,“ボールスピード&ミート率”,“ボールスピード&推定飛距離”の3種類が用意され、クラブ種でパター以外が選択されている場合、モードセレクトボタンB2の“短押し”により、”ヘッドスピード&推定飛距離”もしくは”ボールスピード&ミート率”のどちらかが交互に選択される。また、パターを選択した場合は強制的に”ボールスピード&推定飛距離”のみとなる。
【0105】
第一マイクロコントローラ14は、現在表示している種類を表示器15に報知する。つまり、上段では、“HEADSPEED”と“BALLSPEED”のいずれか一方を表示し、下段では、“MEET”(ミート率の場合)と“DIST”(推定飛距離の場合)のいずれか一方を表示する。
【0106】
また、クラブセレクトボタンB3とモードセレクトボタンB2を同時押しした場合、第一マイクロコントローラ14は、速度単位を切り替える。本実施形態で用意された速度表示単位は、“m/s”(メートル/秒)と“mph”(マイル/時)の2種類用意している。第一マイクロコントローラ14は、選択された速度表示単位を表示器15に表示する。
【0107】
クラブセレクトボタンB3は、使用するクラブに合わせて、そのクラブ種を選択・指定するためのボタンである。これにより、第一マイクロコントローラ14は、選択されたクラブ種とヘッドスピードやボールスピード等の情報から、推定飛距離を算出することができる。具体的には、第一マイクロコントローラ14は、クラブセレクトボタンB3の“短押し”を認識すると、下記の順でクラブ種を巡回させる。
「1W→3W→5W→3I→4I→5I→6I→7I→8I→9I→W(ウエッジ)→Pt(パター)」
【0108】
また、第一マイクロコントローラ14は、このクラブ種の巡回に合わせて、表示器15の右上のクラブ種表示エリアに、“W,I,tと7セグメント”を適宜用いて現在選択されているクラブ種を表示する。つまり、ウッド(1W,3W,5W)が選択されている場合には、“W”と選択された数字を表示し、アイアン(3I,4I,5I,6I,7I,8I,9I)が選択されている場合には、“I”と選択された数字を表示し、ウエッジ(W)が選択されている場合には、“W”のみを表示し、パター(Pt)が選択されている場合には、“t”のみを表示する(7セグメントを使ってPを併設表示しても可)。
【0109】
このクラブ種は、推定飛距離算出の際、係数の参照条件となるため、スイング前に予め選択しておく。なお、Pt(パター)選択時は、推定飛距離の単位は自動的に”m”(メートル)となる。
【0110】
また、本実施形態では、1周期ごとのデータに基づいて速度を算出しているとともに、誤検出のおそれのあるデータは破棄し、最終的に残った信頼性のあるデータに基づいて速度を求めているので、表示される速度は、周囲の状況等に影響を受けない正確なものとなる。また、実際にボールをヒットした状態でヘッドスピードを測定した場合、ボールはインパクト後に勢いよく飛び出していくため、当該ボールの移動速度はヘッドスピードよりも十分に高速度となり、ドップラーセンサ11の出力は係るボールの移動に基づくものとなるおそれがあるが、ゴルフクラブ2のヘッド2aがドップラーセンサ11の検知範囲に突入してからボールにインパクトすると想定される位置までの距離の間に発生するドップラー信号の波数に相当する110回の規定回数分しかメモリ22に周期データを蓄積しない構成であるため、ボールの有無に関係なく、スイングスピードを正しく測定できる。
【0111】
なお、ボールスピード算出手段である第二マイクロコントローラ17は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とするとよい。
【0112】
すなわち、ドップラーセンサ11や、第一マイクロコントローラ14(スイング判別手段と第一蓄積手段とヘッドスピード算出手段)には電力を常に供給する一方、第二マイクロコントローラ17(第二蓄積手段とボールスピード算出手段)には、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、電力の供給を停止し、次にスイング判別手段たる第一マイクロコントローラ14によってヘッドのスイングがあったと判別されたら、第二マイクロコントローラ17への電力の供給を再開するようにするとよい。あるいは、ドップラーセンサ11と第一マイクロコントローラ14には電力を常に供給する一方、第二マイクロコントローラ17は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、省電力モードに入り、次に第一マイクロコントローラ14によってヘッドのスイングがあったと判別されたら、省電力モードから通常モードに切り替えるようにしてもよい。
【図面の簡単な説明】
【0113】
【図1】利用態様の一例を示す図である。
【図2】利用態様の一例を示す図である。
【図3】本発明に係る速度測定装置の好適な一実施形態の外観を示す平面図である。
【図4】本発明にかかる速度測定装置の好適な一実施形態を示すブロック図である。
【図5】マイクロコントローラの内部構成を示す図である。
【図6】マイクロコントローラのオーバーフロー発生諸機能を示すフローチャートである。
【図7】マイクロコントローラのドップラーパルス立下がり検知処理機能を示すフローチャートである。
【図8】マイクロコントローラのドップラーパルス立下がり検知処理機能を示すフローチャートである。
【図9】マイクロコントローラの速度算出処理機能を示すフローチャートである。
【符号の説明】
【0114】
10 ヘッドスピード測定装置
11 ドップラーセンサ
12,12a アンプ
13,13aコンパレータ
14 第一マイクロコントローラ
15 表示器
16 スイッチ群
17 第二マイクロコントローラ
20 筐体
21 カウンタ
22 メモリ
【技術分野】
【0001】
本発明は、ゴルフクラブのヘッドスピード及びボールスピードを測定する速度測定装置に関するものである。
【背景技術】
【0002】
移動する被測定物の最大速度を測定する速度測定装置として、ドップラーセンサを用いたものが知られている。このドップラーセンサを用いた従来の速度測定装置では、被測定物は等速運動(車両など)あるいは減速運動(投げられたボールなど)をするものを対象としている。そのため、測定を開始してから最初に測定された速度データを最大速度として表示すれば実用上の問題は発生しなかった。これに対し、例えばゴルフクラブ等のスイング運動のように、速度0の状態から急激に加速し、ボールを打撃するポイントで最高速に達するといった被測定物が加速運動をする場合、ドップラーセンサの検知範囲に測定対象物が進入してきた瞬間がスイングの最大速度であるとは限らず、測定開始してから最初に測定された速度を表示する従来の方法ではスイングの最大速度を捕らえられないという問題があった。
【0003】
係る問題を解決するため、従来、特許文献1,2に開示された発明がある。特許文献1に開示されたクラブヘッド速度及びテンポを測定するための小型レーダでは、RFドップラーレーダを用い、速度を測定し続け、先に記憶された速度よりも速い任意の測定速度によって最大速度の記憶値を置き換えることで、速度の最大値を求めている。
【0004】
また、特許文献2に記載のゴルフクラブの運動測定装置は、超音波センサでとらえたドップラー効果で変移した周波数の信号をウェーブレット変換により解析することで速度の最大値を求めている。
【特許文献1】特開2006−326318
【特許文献2】特開2003−210638
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、周辺物体の数、物体との距離、物体の反射面の大きさ・材質・形状等、様々な周囲の環境(状況)の要因により、ドップラーセンサから得られるドップラー信号波形は乱れる。そのため、ドップラー信号に基づいて算出される最大速度が、スイングの実際の最大速度とはならない場合がある。
【0006】
特許文献2に記載の発明では、リアルタイムに計算処理を行う必要があるので高速処理が可能なプロセッサが必要となってしまう。よって、装置の価格が高くなり、消費電力も大きくなるなどコストがかかるという問題がある。また、ウェーブレット変換等の変換を加える方法では、変換を加える都合上、一波ごとの時間分解能が低くなってしまうという問題がある。そのため、測定対象物の瞬時速度データを得るのには適さず、瞬時速度データを用いて、きめ細かい演算処理や判定処理を行うことが困難であるという問題がある。特にヘッドスピードの測定が困難であるという問題がある。また、利用者が実際にボールを打撃した状態のヘッドスピードを測定した場合、速度測定装置は、ボールスピードをヘッドスピードと誤測定してしまう問題がある。
【0007】
また、ドップラーセンサは、マイクロ波を反射する物体の動作を全て検知してしまうので、スイング前の動作(たとえばスイングを終えた測定者が測定結果を確認する為に体を動かす場合など)にセンサが反応し、速度表示が更新されて結果が確認できなくなる等の問題がある。
【0008】
本発明は、小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる使い勝手のよい速度測定装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)上述した目的を達成するために、ドップラー信号を出力するドップラーセンサと、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを複数個蓄積可能な第一蓄積手段と、前記ドップラーセンサによって出力されたドップラー信号に基づき当該ドップラー信号の周期に関するデータを得て前記第一蓄積手段への蓄積を行い、前記第一蓄積手段に蓄積されたデータ群に基づきゴルフクラブのヘッドスピードを算出するヘッドスピード算出手段と、前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積可能な第二蓄積手段と、前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て前記第二蓄積手段への蓄積を行い、前記第二蓄積手段に蓄積されたA/D変換データ群に対する周波数スペクトル解析を行ってボールスピードを算出するボールスピード算出手段とを備える速度測定装置であって、前記ゴルフクラブのスイングがあったか否かを判別するスイング判別手段を備え、前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始し、前記ボールスピード算出手段は、前記スイング判別手段によってヘッドのスイングがあったと判別された場合に、前記第二蓄積手段へのA/D変換データの蓄積を開始する構成とした。
【0010】
本発明によれば、ヘッドスピードはドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積したデータ群に基づいて算出する一方、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積したA/D変換データ群に基づいて算出する。
【0011】
このようにヘッドの速度とボールの速度を分離することで、ヘッドスピードとボールスピードの双方を正確に測定することができる。特に、測定時に測定位置において、ヘッドは加速度運動により速度変化が急峻となる一方、ボールは、ほぼ一定速度とみなすことができるという特性がある。またヘッドの運動によって出力されるドップラー信号のレベルは大きくなる一方、ボールの運動によって出力されるドップラー信号のレベルは小さくなるという特性がある。そのため、本発明のように、ヘッドスピードについては、ドップラー信号の周期に基づいて算出し、ボールスピードについては、ドップラー信号に基づく信号をA/D変換して、周波数スペクトル解析を行って算出すれば、ヘッドスピードと、ボールスピードの双方のスピードを精度のよい値を得ることができる。
【0012】
また、本発明によれば、ドップラーセンサによって出力されたドップラー信号に基づきそのドップラー信号の周期に関するデータを得て第一蓄積手段への蓄積を行い、第一蓄積手段に蓄積されたデータ群に基づきヘッドスピードを算出する。例えば、測定対象物がドップラーセンサの測定可能範囲内に進入してから、測定したい速度(例えば測定対象物がスポーツ用品であればボールへのインパクト付近の最大速度)に達するまでのドップラー信号を2値化(デジタル化)してドップラーパルス信号を得て、ドップラーパルス信号からドップラー信号の周期データを得る。例えばこれらの周期データを全て保持できるだけのメモリを第一蓄積手段として用意しておき、ヘッドスピード算出手段は、測定中、このメモリに周期データを蓄積していく。そして例えば速度算出手段はメモリに蓄積されたこれらの周期データ群に基づいてクラブヘッドのスイング速度(ヘッドスピード)を算出する。
【0013】
本発明のように、ドップラー信号の周期に関するデータを蓄積し、蓄積されたデータ群に基づいてヘッドスピードを算出することで、リアルタイムに計算する場合(特許文献2など)に比べ、ヘッドスピードの測定部を簡略化でき、低コストで小型(携帯等)な装置を容易に実現できる。また、先に記憶された速度よりも速い任意の測定速度によって最大速度の記憶値を置き換えることで速度の最大値を求める従来の方法(特許文献1など)に比べ、蓄積した周期データに基づいてスイング速度を算出するため、ボール等を同時に打撃するスイングの場合におけるボール等の影響も少なく、また、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができる。
【0014】
また本発明によれば、ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始する。このようにすることで、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができ、また蓄積するデータ数を減らすことができる。なお、ドップラー信号の周期が所定値より小さくなったかは、電子回路を用いて判定するようにしてもよいし、前述した周期に関するデータに基づいて判定するようにしてもよい。そして、この所定値は、ヘッドのスイング開始とみなされるときの値とするとよい。この値は、たとえば、実際にヘッドをスイングしているときの値と、ヘッドをスイングしていないときの値とを取得して、両者の値の違いに基づいて設定するとよい。
【0015】
また本発明によれば、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て第二蓄積手段への蓄積を行い、第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行って算出する。この第二蓄積手段へのA/D変換データの蓄積は、スイング判別手段によってヘッドのスイングがあったと判別された場合に開始する。
【0016】
このように蓄積を、ヘッドのスイングがあったと判別された場合に開始することで、常に蓄積する構成にする場合に比べ、必要な第二蓄積手段の容量を減らすことができる。そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0017】
なお、算出したヘッドスピードとボールスピードは、ユーザが認知できるように出力するとよい。たとえば、ヘッドスピード測定装置には出力手段を備え、その出力手段からヘッドスピード算出手段で求めたヘッドスピードと、ボールスピード算出手段で求めたボールスピードを出力するようにするとよい。出力手段はたとえばLEDやLCDなど各種の表示装置としたり、あるいは、スピーカとして音声合成で出力するようにしたりしてもよい。
【0018】
またドップラーセンサは従来から知られている様々なものを用いることができる。たとえば、所定周波数の出力信号を生成する信号生成手段と、前記信号生成手段で生成された前記出力信号を出力する送信アンテナと、前記出力信号の反射波を受信する受信アンテナと、前記受信アンテナで受信された反射波と前記出力信号を周波数混合するミキサと、前記ミキサから出力される混合信号を前記ドップラー信号として出力するドップラーセンサを用いることができる。送信アンテナと受信アンテナは異なるものとすることもできるし、同一のものを用いるようにもできる。このように、たとえば送信波と反射波の差分信号をドップラー信号として出力するドップラーセンサを用いることができる。ドップラー信号としては、この差分信号そのものでもよいし、差分信号に所定の処理を加えたものでもよい。ドップラーセンサとしては、特にマイクロ波ドップラーセンサを用いるとよい。マイクロ波ドップラーセンサによれば、装置自体のセンサ部を開口させたり、透明板を用いたりする必要がなく、装置のデザイン性を損なわずにすむ。
【0019】
また、周期に関するデータとは、周期そのものでもよいし、周波数やその他周期に所定の演算処理を施した値でもよい。例えば周期をパルスに変換しそのパルスの幅(時間)をカウントするパルスカウント方式とするとよい。
【0020】
特に、前記周期に関するデータは、周期の時間に関するデータとするとよく、特に少数の周期(例えば数周期)の時間に関するデータとするとよい。最もよいのは、一周期の時間に関するデータとすることである。すなわち、前記周期は一周期であり、前記周期に関するデータは、一周期の時間に関するデータであること、とするとよい。
【0021】
このようにすれば、測定対象物であるゴルフクラブのヘッドの瞬時速度データを得られる。これにより一波ずつ、きめ細かい演算処理ができる。たしかにS/N的にはFFTやウェーブレット変換のほうが有利である。しかし、ドップラーセンサの監視エリアは、点ではなく空間であるため、ヘッドのスイング速度を測定する場合には、ヘッドだけでなくヘッドをスイングする者の肢体やヘッドに付随する物(例えば、シャフト部分)からの信号が含まれるため、S/Nだけでなく、ドップラー信号に含まれる突発的な不適切波をきめ細かく見極めて除外することの方が、ヘッドスピード測定値の高精度化につながるからである。
【0022】
なお、ボールスピード算出手段における周波数スペクトル解析は、例えば、ウェーブレット変換などによって行うことができる。ただし、下記(2)のようにするとよい。
【0023】
(2)すなわち前記周波数スペクトル解析は、高速フーリエ変換(FFT)で行うと特によい。このようにすれば、ゴルフボールはヘッドに比べ小さく遠い位置になる。このように小さい反射波による小さいレベルのドップラー信号でSN比が不利な入力信号においても、FFTは、周波数分解により、ノイズ成分が周波数全体に分散し、信号成分は線スペクトルとして抽出されるので、解析に充分なSN比を確保することができる。
【0024】
(3)また、前記スイング判別手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別するとよい。ヘッドのスイングに対応する周期パターンは、予め各種のクラブを多数の人でスイングして得た周期パターンと、スイングしていない場合に得られる周期パターンとに基づいて、予め決定しておいてもよいし、例えば、利用者のスイングに対応する周期パターンを学習させて利用するようにしてもよい。
【0025】
(4)そして、前記ボールスピード算出手段は、前記第二蓄積手段へのA/D変換データの蓄積の開始後、所定期間分のA/D変換データの蓄積を行った後、当該A/D変換データの蓄積を終了し、当該蓄積の終了後に、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出するとよい。この所定期間は、ヘッドがボールにヒットしてから測定に必要な時間とするとよい。
【0026】
このようにすれば、第二蓄積手段に必要なA/D変換データの格納領域の大きさを一定の値とすることができ、常時蓄積を行う構成に比べ必要なデータの格納領域の大きさを小さくすることができる。さらに蓄積されたA/D変換データに対する周波数スペクトル解析は、蓄積の終了後に行うため、A/D変換データの蓄積と周波数スペクトル解析を同時に行う構成に比べて処理能力の低い安価な処理装置でボールスピードを的確に測定することができる。所定期間としては、例えば100ms〜200ms程度とするとよい。第二蓄積手段は、例えば、数キロバイト程度のメモリで構成することも可能である。
【0027】
そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0028】
(5)前記ボールスピード算出手段は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とするとよい。このようにすれば、速度測定装置の消費電力を抑えることができる。そのため(7)に示すように、速度測定装置が携帯可能な筐体に組み込まれ、電池によって駆動される場合に特に優れた効果を発揮する。
【0029】
例えば、ドップラーセンサとスイング判別手段と第一蓄積手段とヘッドスピード算出手段には電力を常に供給する一方、第二蓄積手段とボールスピード算出手段は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、電力の供給を停止し、次に前記スイング判別手段によってヘッドのスイングがあったと判別されたら、電力の供給を再開するようにしてもよい。あるいは、ドップラーセンサとスイング判別手段と第一蓄積手段とヘッドスピード算出手段には電力を常に供給する一方、第二蓄積手段とボールスピード算出手段は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、省電力モードに入り、次に前記スイング判別手段によってヘッドのスイングがあったと判別されたら、省電力モードから通常モードに切り替えるようにしてもよい。
【0030】
(6)測定対象がパターとパター以外のクラブのいずれであるかを設定する測定対象設定手段と、前記ドップラーセンサによって出力されたドップラー信号の増幅を行う増幅手段を備え、前記増幅手段は、前記測定対象設定手段によって前記測定対象としてパターが設定された場合には当該ドップラー信号の通過帯域を、前記測定対象としてパター以外が選択された場合の当該ドップラー信号の通過帯域よりも低い周波数帯域にするとよい。パターのとき、ボールスピードが遅いため、パター以外の場合に比べ、ドップラー信号の通過帯域を、例えば、パター以外の場合の5分の1程度の周波数の通過帯域とするとよい。このようにすれば、クラブがパターの場合でも、パター以外の場合にも、それぞれが必要としない帯域の回路ノイズ等が遮断されるため、ヘッドスピードもボールスピードも的確に測定することができる。
【0031】
(7)上記(1)〜(6)のいずれかに記載の速度測定装置は、携帯可能な筐体に組み込まれ、電池によって駆動される速度測定装置として構成する場合に、特に優れた効果を発揮する。すなわち、(1)〜(6)の発明によれば、回路規模を小さく抑えることができる。例えば、各手段を構成する処理装置に、比較的処理速度が遅く、小型で、安価で、消費電力の少ないものを採用することが容易にできる。そのため速度測定装置を小型で携帯可能な筐体とすることが容易にできるとともに、電池による長時間の駆動を行うことが容易にできる。例えば、周波数スペクトル解析の演算を常時行う必要がなくなり、消費電力を抑えることができる。また、周波数スペクトル解析の演算をリアルタイムに行う必要がなくなるので、CPU等の処理部を高性能のものにする必要がなくなる。よって消費電力やコストを抑えることができる。さらには、例えば、データ蓄積の開始タイミングと終了タイミングが予め規定しておくことで、データ蓄積用のメモリの量を予め定められた量だけ用意すればよくなり、大量のメモリを用意する必要がなくなる。したがって、持ち運び可能な小型かつ電池駆動の速度測定装置とすることが容易にできる。
【0032】
(A)前記ヘッドスピード算出手段は、規定値以上の前記ドップラー信号の周期が検出された場合には、規定値以上の前記ドップラー信号の周期に対応する前記ドップラー信号の周期に関するデータを前記第一蓄積手段に蓄積しないこと、とするとよい。
【0033】
特に、ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記蓄積手段への前記周期に関するデータの蓄積を開始し、蓄積の開始後、規定値以上の前記ドップラー信号の周期が検出された場合には、規定値以上の前記ドップラー信号の周期に対応する前記ドップラー信号の周期に関するデータを前記蓄積手段に蓄積しないようにするとよい。
【0034】
(B)前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積された前記データの個数が所定の基準個数に達した場合に前記ヘッドスピード速度の算出を行うこと、とするとよい。蓄積された複数のデータに基づいてヘッドスピードの算出を行うことで、ノイズや周囲の状況の影響を抑制し、精度良く測定ができる。
【0035】
(C)前記ヘッドスピード算出手段は、前記ドップラーセンサによって得られたドップラー信号の周期が所定値以下になることを待ち、所定値以下になった場合に前記周期に関するデータの前記第一蓄積手段への蓄積を開始し、当該蓄積開始後、前記ドップラー信号の周期が所定値以上になった場合であって、前記第一蓄積手段へのデータの蓄積個数が前記基準個数に達していない場合には、前記ドップラーセンサによって得られたドップラー信号の周期が所定値以下になることを待つ状態へ戻ること、とするとよい。
【0036】
たとえば、ドップラー信号を2値化(デジタル化)したドップラーパルス信号を得る構成において、測定を開始したらドップラーパルスの入力を待ち、ある一定の周波数を超えるドップラーパルスが入力されたらドップラーパルス周期データ蓄積用メモリへのデータ蓄積を開始し、さらに、データ蓄積は開始したものの一定時間ドップラーパルスが入力されない場合、すでに蓄積済みのデータの個数が規定個数を超えていなければ、測定条件不成立とし、再度ドップラーパルス入力を待つ状態に戻るようにするとよい。たとえば、この一定時間は制御手段にタイマを備え、当該タイマでオーバーフローが発生したことで検出するようにしてもよい。
【0037】
このようにすれば、速度の遅い物体の運動、及び、速度は速いがクラブスイングほどに継続性の無い瞬間的な運動の影響を排除することができる。バックスイングは正規スイングよりも遅いので、たとえば、蓄積手段へのデータ蓄積を開始する基準周波数を速度測定に支障が出ない範囲で出来る限り高くする(基準周期を速度測定に支障が出ない範囲で出来る限り低くする)ことで、バックスイング測定もかなりの高確率で回避することが出来る。したがって、ボール等の影響も少なく、どのような使用環境であっても、比較的正確な測定結果を安定的に得ることができ、使い勝手のよい速度測定装置を提供することができる。
【0038】
さらに、この(C)の発明のようにすれば、必要な第一蓄積手段の容量を小さくできるとともに、異常なデータを排除することができる。そして、比較的正確な測定結果を安定的に得ることができ、使い勝手のよい速度測定装置を提供することができる。なお、たとえば、前記規定値は、前記所定値よりも大きい値とするとよい。すなわち開始条件となる周期よりも蓄積条件となる周期のほうを長くするとよい。このようにすれば、より的確な測定結果を得ることができる。
【0039】
(D)前記ヘッドスピード算出手段が得る前記周期に関するデータの個数は、測定対象物が前記ドップラーセンサの検知範囲に突入してから測定対象位置に至るまでの距離の間に発生するドップラー信号の波数とすること、とするとよい。
【0040】
例えば測定対象物がゴルフクラブのヘッドである場合、測定対象位置は、ボールが存在した場合にボールにインパクトすると想定される位置となる。この場合、ヘッドスピード算出手段が得る前記周期に関するデータの個数は、ゴルフクラブのヘッドが前記ドップラーセンサの検知範囲に突入してからボールが存在した場合にボールにインパクトすると想定される位置までの距離の間に発生するドップラー信号の波数とするとよい。
【0041】
この(D)の発明によれば、インパクト後の不要な測定データの蓄積を防ぎ、ボールの動きによる誤測定も回避することが可能になる。例えば、測定対象物がゴルフクラブのヘッドである場合、最適な蓄積個数は、ゴルフクラブが検知範囲に突入してからボールが存在した場合にボールにインパクトすると想定される位置までに発生する波の数であるが、これはシャフト長や測定者の身長・腕の長さ、装置位置などの要素により変動するのでこれらを加味して決定するとよい。たとえば、60cmから80cmに相当する波数とするとよい。周期データの蓄積個数は、たとえば、24GHz帯のマイクロ波を用いる場合100個程度とするとよい。
【0042】
(E)前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積候補データとして格納する蓄積候補データ格納手段と、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号に基づき前記蓄積候補データ格納手段に格納された蓄積候補データを、前記第一蓄積手段への蓄積対象にするか否かを判定する判定手段と、を備え、前記判定手段によって蓄積対象データと判定された前記蓄積候補データ格納手段に格納された蓄積候補データを前記第一蓄積手段に蓄積すること、とするとよい。
【0043】
このような構成の場合、例えば「ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合」の判定、「規定値以上の前記ドップラー信号の周期が検出された場合」の判定、「所定値以下になった場合」の判定は、判定手段によって行うようにするとよい。
【0044】
(F)前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積されたデータ群に対して所定の算術的処理を行って前記スイング速度を算出すること、とするとよい。たとえば、蓄積した周期データに算術的処理として移動平均をとる処理を行った後、所定の条件(たとえば最小値)に合致するデータを検索するようにしてもよい。このように、蓄積されたデータの中から、単に最小周期のデータを用いてスイング速度を算出するのではなく、それぞれのデータを前後のデータと比較することで不適切なデータを排除したり、不適切なデータが排除された信頼度の高いデータ群のみで平均化したりすることによる測定値の安定化を図ることができる。
【0045】
(G)上記の(F)の発明を前提とし、さらに前記ヘッドスピード算出手段は、前記第一蓄積手段に蓄積されたデータ群のデータの内、ばらつきが所定の許容値よりも大きいデータを除外する除外処理と、当該除外処理によって除外されなかったデータである算術処理対象データに対して所定の算術的処理とを行うものであること、とするとよい。このようにすれば、測定結果の精度をさらに向上させることが可能となる。
【0046】
(H)上記の(G)の発明を前提とし、前記所定の許容値として複数の異なる許容値を設け、相対的に小さな許容値で前記除外処理を行い、その結果、前記算術対象データの個数が所定の個数未満となった場合には、前記相対的に小さな許容値よりも大きな許容値で前記除外処理をしなおすこと、とするとなお良い。
【0047】
すなわち、ばらつきの許容値を変えて、数段階に分けて行うとよい。このようにすれば、ばらつきの少ない周期に関するデータが蓄積されている場合には、より高精度のスイング速度を算出でき、一方、ばらつきの大きなデータが蓄積されている場合には、その中から、ある程度の精度のスイング速度を算出できるので、周期に関するデータがあまりうまく取得できない状況であっても、まったくスイング速度が算出されないという状況を防止することができる。このように周期に関するデータの取得状況に応じた精度を実現でき、使い勝手もよいスイング速度算出装置を実現できる。
【0048】
(I)測定対象物の移動方向を検出する移動方向検出手段を備え、前記第一蓄積手段は、前記移動方向検出手段によって検出された移動方向がスイング方向でない場合には、前記周期に関するデータを蓄積しないこと、とするとよい。
【0049】
上述したように、本発明に用いるドップラーセンサとしては種々のものとすることができるが、たとえば1出力タイプのドップラーセンサでは、物体が近づいているのか遠ざかっているのかが判別できない。そのため、たとえばバックスイング時のように、正規のスイングでない場合であってもデータを蓄積してしまうことがあり、誤った速度をスイング速度として得てしまう場合がある。そこで、この(I)の発明のようにすれば、正規の移動方向のデータのみを第一蓄積手段に蓄積することで、バックスイング時のように、正規のスイングでない場合の影響を低減することができる。なお、移動方向検出手段としては、たとえば2出力タイプのドップラーセンサを用い、その2出力タイプのドップラーセンサの2つの出力の位相の差に基づいて、移動方向がスイング方向であるか否かを検出する構成とするとよい。
【0050】
(J)前記ヘッドスピード算出手段によって算出されたヘッドスピード及び前記ボールスピード算出手段によって算出されたボールスピードを表示する表示手段を備え、前記表示手段は、前記ヘッドスピードまたはボールスピードが算出された後、所定時間の間、当該スピードの表示を点滅表示すること、とするとよい。
【0051】
このようにすれば、スピードの計測が成功したか否かをユーザは点滅表示がされたか否かでわかる。またスピードの計測に成功したことを表示するための別の表示領域も不要であり、表示の駆動に大量の入出力回路や配線が必要となってしまうこともない。したがって、低コストで、小型化(携帯等)が可能な、使い勝手のよい速度測定装置を提供することができる。
【0052】
(K)またヘッドスピード算出手段によって算出されたヘッドスピードと、ボールスピード算出手段によって算出されたボールスピードに基づいてミート率を算出して表示するとよい。ミート率は、ボールスピード/ヘッドスピードで算出する。
【0053】
(L)さらに、クラブの選択機能を備え、ヘッドスピード算出手段によって算出されたヘッドスピードまたはボールスピード算出手段によって算出されたボールスピードの少なくともいずれか一方により、推定飛距離を算出し表示するとよい。また、例えば、クラブの素振りの場合など、ボールスピード算出手段によってボールスピードに相当するスピードが検出されなかった場合、ボールなしのスイングであると判定して、算出されたヘッドスピードに基づいて、推定飛距離を算出し表示するようにしてもよい。このようにすれば、ボールがある場合もない場合にも、推定飛距離を知ることができる。なお、推定飛距離の算出は、例えば、ヘッドスピードに対するクラブ種ごとの係数と、ボールスピードに対するクラブ種ごとの係数とを、実測値に基づいて求めて予め記憶しておき、これらの記憶されたこれらの係数と測定したスピードとを乗算して、求めるとよい。ヘッドスピードに基づいて求めた推定飛距離と、ボールスピードに基づいて求めた推定飛距離のいずれを、出力する推定飛距離とするかは、予め決定した所定のルールに基づいて決定するようにしてもよいし、両者の推定飛距離間で所定の演算(例えば平均値)を行って出力する推定飛距離を算出するようにしてもよい。
【発明の効果】
【0054】
本発明によれば、小型で、安価で、消費電力が少なく、比較的正確なヘッドスピードとボールスピードの双方の測定結果を安定的に得ることができる使い勝手のよい速度測定装置を提供できる。
【発明を実施するための最良の形態】
【0055】
図1,図2は、本発明の速度測定装置であるゴルフクラブのヘッドスピード測定装置の利用状態の一例を示す図である。図に示すように、ゴルフクラブのヘッドスピード測定装置10は、ゴルフクラブ2をスイングするゴルファー1の後方所定位置に設置する。具体的な設置位置は、ゴルフクラブのヘッドスピード測定装置10の検知範囲が、スイング中のゴルフクラブ2のヘッド2aが最大速度で移動する地点を含むような位置である。一例としては、図1に示すように、ゴルフクラブ2のヘッド2aの移動軌跡Kの最下点付近がボールBに対するインパクト位置となり、通常、当該位置付近でヘッド2aの移動速度は最大速度になるため、係る移動軌跡Kの最下点の接線L上であり、かつ、ゴルファー1の後方を設置位置とする。本実施形態では、ボールBとゴルフクラブのヘッドスピード測定装置10との距離は、厳密に決める必要はないが、バックスイング時にゴルフクラブ2がゴルフクラブのヘッドスピード測定装置10に当たらない位置とする。たとえば、ボールBとゴルフ支援装置10との距離は、約1mとする。後述するように、このゴルフ支援装置10には、ドップラーセンサが内蔵されているため、ドップラーセンサのアンテナの開口面11aが、ボールBに正対する(接線L上を向く)ように設置される。なお、本実施形態では、ゴルフクラブのヘッドスピード測定装置10は、ゴルフクラブ2をスイングするゴルファー1の後方所定位置に設置するものとして説明する。なお、使用するクラブは、ウッド・アイアン・パター等何でも良い。
【0056】
なお、図ではボールBをおき、実際にゴルファー1がボールBを打つように描画したが、本実施形態では、ボールBは無くても良い。つまり、ヘッドスピード測定装置10は、ボールBをおいて実際に打った場合には、そのスイングする毎にヘッドスピードとボールスピードの両者を同時に測定し、ボールBを置かない(置いていても実際に打たない)で素振りをした場合にはヘッドスピードのみ測定する。
【0057】
なおまた、図2は、ゴルファー1が右打ちの場合の例を示しており、左打ちのゴルファーの場合には、左右を反転した状態に設置することで対応できる。つまり、本実施形態のゴルフ支援装置は、右打ち/左打ちのいずれにも対応できる。
【0058】
図3は、ゴルフ支援装置10の外観を示す平面図であり、図4は、その内部構成を示すブロック図である。図3に示すように、ゴルフ支援装置10は、防水加工(防水構造)が施された扁平な矩形の筐体20の内部に、図4に示す各構成要素を収納して構成される。構成要素の一部は、筐体20の外部に露出する。
【0059】
図4に示すように、ゴルフクラブのヘッドスピード測定装置10は、出力周波数が24.15GHzのマイクロ波ドップラーセンサ11と、当該ドップラーセンサの出力信号(1波がゴルフクラブのヘッドの6mmの移動に相当する信号)を増幅するアンプ12と、アンプ12によって増幅された信号を基準値と比較し、ドップラーパルス(基準値以上の場合にハイレベルで基準値より小さい場合にはローレベルの信号)を出力するコンパレータ13と、コンパレータ13から出力された信号を入力してスイング速度(ヘッドスピード)を求める第一マイクロコントローラ14と、上記のアンプ12から出力される信号(ドップラーセンサ11から出力されたドップラー信号を増幅した信号)を入力してボールスピードを求める第二マイクロコントローラ17と、第一マイクロコントローラ14からの制御によってスイング速度等の表示を行う表示器15と、第一マイクロコントローラ14に接続されたスイッチ群16と、を備える。表示器15には、第二マイクロコントローラ17で求めたボールスピードも表示される。表示器15は、LCDや有機ELディスプレイ等から形成される。スイッチ群16は、電源スイッチと、モード切替スイッチとからなる。
【0060】
図3に示すように、筐体20の前面20bがアンテナの開口面11aとなり、筐体20の後面20cにはマイクロSDカードスロットが設けられている。また、筐体20の裏面(下面)側には、電池収納部が設けられる。また、表示器15並びにスイッチ群16は、筐体20の上面に露出する。スイッチ群16は、本実施形態では、パワーボタンB1と、モードセレクトボタンB2と、クラブセレクトボタンB3と、ファンクションボタンB4の4つの操作ボタンを備えている。各操作ボタンB1〜B4が押下されると、その押下されたことが第一マイクロコントローラ14に伝えられ、第一マイクロコントローラ14が所定の処理を行う。
【0061】
パワーボタンB1は、ヘッドスピード測定装置10の電源のオン/オフを制御するためのもので、長押しにより、装置電源のオン/オフの切り替えを行うためのボタンである。第一マイクロコントローラ14は、装置の電源が切れている状態で、パワーボタンB1が長押しされたことを認識すると、電源をオンにし、装置の電源が入っている状態で、パワーボタンB1が長押しされたことを認識すると、電源をオフにする制御を行う。
【0062】
モードセレクトボタンB2は、モード切り替え指示をするためのボタンである。本実施形態のヘッドスピード測定装置10は、1スイングごとに、スイングに伴う諸特性を測定して表示する“測定モード”と、仮想ゴルフコースを想定して、ゲーム感覚で仮想ゴルフコースを回ることができる“トレーニングモード”とを有している。そこで、マイクロコントローラ14は、このモードセレクトボタンB2が“長押し”されたことを認識すると、“測定モード”と“トレーニングモード”を交互に切り替える。そして、マイクロコントローラ14は、現在のモードが“トレーニングモード”の場合、表示器15の左上隅に”GAME”のロゴを表示し、“測定モード”の時は、”GAME”のロゴを表示しない。よって、ユーザは、”GAME”のロゴの表示の有無により、現在トレーニングモード中か測定モード中かを認識することができる。また、測定モードの状態で実際のゴルフ場でプレイをしながら、そのプレイ中の各ショット(スイング)を測定して記録することで、実際のプレイの記録を行うことができる。
【0063】
また、測定モードで求めることができる諸特性は、“ヘッドスピード”,“ボールスピード”,“推定飛距離”,“ミート率”である。ヘッドスピード並びにボールスピードは、ドップラーセンサの出力に基づいて求める。なお、トレーニングモードは、記憶保持している仮想ゴルフ場(コース)の地図データ(ティーグランドからカップまでの距離,OB・ウォーターハザード等のペナルティゾーンの位置等)を読み出し、ゴルフクラブのスイングに伴うヘッドスピード或いはボールスピードから推定飛距離を算出し、カップまで残り距離を求めるとともに、その求めた残り距離やそれまでの打数を表示器15に表示し、最終的にカップイン(残り距離がしきい値以下)になるまで繰り返すものである。
【0064】
本発明では、係るトレーニングモードと測定モードを両方備える必要はなく、例えば、測定モードのみでも良い。また、逆に、トレーニングモードのみの装置とした場合でも、仮想ゴルフ場をプレイする際に行うスイングする都度、上記の諸特性を求めるようにしても良い。
【0065】
次に、諸特性を求める機能について説明する。まず、パワーボタンB1の長押しにより電源がONされると、内部回路に電源が投入され、ドップラーパルスがコンパレータ13から第一マイクロコントローラ14に入力される。
【0066】
第一マイクロコントローラ14は、ゴルフクラブのヘッドスピードの測定処理を行う。ヘッドスピードの測定処理は、「ドップラーパルス周期の測定と蓄積」と、「速度算出」の2つの処理で構成される。本装置ではゴルフクラブのスイング時におけるヘッドスピードの速度測定に特化するため、スイング開始から終了までの速度データをいったん蓄積し、その後蓄積されたデータからスイングの最大速度を算出する。これらの処理の具体的内容について次に説明する。
【0067】
図5に示すように、第一マイクロコントローラ14は、16ビットのカウンタ(タイマ)21と、第一蓄積手段たるメモリ(RAM)22とを有する。カウンタ21には、基準パルスとして2.5MHzの信号が入力され、カウントが行われる。カウンタ21の値は、所定のイベント発生時にキャプチャレジスタ21aに取り込むことができる。メモリ22内には、周期データを格納する周期データ格納領域が設けられ、この領域は、16ビット幅で110個の配列領域(計220バイト)からなる。
【0068】
第一マイクロコントローラ14には、コンパレータ13から出力されたドップラーパルスが入力される。第一マイクロコントローラ14は、このドップラーパルスの周期を測定する。この周期の測定にはカウンタ21を利用する。具体的には、前記所定のイベントとしてドップラーパルスの立下りが発生した場合に、ドップラーパルスの立下り検出割り込みを発生させるとともに、そのときのカウンタ値をキャプチャレジスタ21aに取り込むよう設定しておく。キャプチャレジスタ21aは、蓄積候補データを格納するものである。そして、ドップラーパルスの立下り検出割り込み発生時には、割り込み処理ルーチンでキャプチャレジスタ21aの内容を周期データとしてメモリ22に記録する。
【0069】
カウンタ21でカウンタ値のオーバーフローが発生した場合には、カウンタオーバーフロー割り込みが発生する。カウンタオーバーフロー割り込みが発生した場合には、カウンタオーバーフロー割り込み処理を行う。
【0070】
第一マイクロコントローラ14が実行する各処理では、測定状態(処理状態)として「開始待ち」,「測定中」,「完了」,「エラー」を規定しており、それぞれの状態はメモリ22上に設定された状態記憶領域に記憶し、この記憶された状態に基づいて処理内容をかえる。状態「開始待ち」は、初回ドップラーパルスの立下りを待っている状態である。リセット直後(電源投入直後)はこの状態とし、ドップラーパルスの立下りを検出し、その周期が規定値以下の場合に、状態「測定中」へ移行させる。状態「測定中」は、周期データを蓄積している状態である。状態「完了」は、周期データの蓄積が完了し、有効な測定データ数が規定値を超えている状態である。この状態になったときには、蓄積データを検査して速度の算出を行う速度算出処理を行う。状態「エラー」は、周期データの蓄積が完了したが、蓄積されたデータ数が規定に満たない状態である。この状態になったら直ちに蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行う。
【0071】
まず、第一マイクロコントローラ14が実行するカウンタオーバーフロー割り込み処理機能を、図6のフローチャートを参照して説明する。カウンタ21は16ビットであるので、カウンタ値が65535+1になったときに、カウンタオーバーフロー割り込みが発生し、この処理を開始する。
【0072】
まず、S110(S110はステップ110の略表記であり、以下同様に表記する。)では、メモリ上に保持しているオーバーフロー発生回数を+1する。続くS120では、測定状態が「開始待ち」または「完了」か、「測定中」であるかを判定する。測定状態が「開始待ち」または「完了」の場合には(S120:開始待ちまたは完了)、この処理を終了する。一方、測定状態が「測定中」の場合には(S120:測定中)、S130へ移行する。S130では、オーバーフロー発生回数が規定回数に達したか否かを判定する。この規定回数は16回に設定している。オーバーフローが16回発生するということは、約400msの長時間にわたってパルスの立下りが入力されないということであり、このような場合には、「測定中」の状態を抜ける必要性があるからである。オーバーフロー発生回数が規定回数に達していない場合(S130:No)、カウンタオーバーフロー割り込み処理を終了する。一方、オーバーフロー発生回数が規定回数に達した場合(S130:Yes)、S140へ移行する。S140では、記録済みデータ数(図3に示す周期データの記録数)が規定数を超えているか否かを判定する。この規定数は“32”に設定している。記録済みデータ数が規定数を超えている場合には(S140:Yes)、S150に移行して、S150で測定状態を「完了」に変更して、この割り込み処理を終了する。一方、記録済みデータ数が規定数を超えていない場合には(S140:No)、S160に移行して、S160で測定状態を「エラー」に変更して、この割り込み処理を終了する。
【0073】
このような処理により、オーバーフロー発生時にオーバーフロー発生回数をカウントするとともに、オーバーフロー発生回数が16回といった異常な状態が発生した場合、そこで測定を中止し、記録済みデータが規定数を超えている場合には測定状態を「完了」に変更して後述する図5に示す速度算出処理を行うのに対し、記録済みデータが規定数を超えていない場合には測定状態を「エラー」に変更し、蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行う。
【0074】
次に、ドップラーパルスの立下り割り込み発生時のドップラーパルスの立下り割り込み処理(ドップラーパルス周期の測定と蓄積処理)の内容を、図7,図8を参照して説明する。
【0075】
第一マイクロコントローラ14は、ドップラーパルスの立下りを検出すると図7,図8に示すドップラーパルスの立下り割り込み処理を開始する。まずS310で、測定状態が、「開始待ち」であるか「完了」であるか「測定中」であるかを判定する。「開始待ち」の場合には(S310:開始待ち)S320へ移行し、「完了」の場合には(S310:完了)S440へ移行し、「測定中」の場合にはS360へ移行する。
【0076】
S320では、周期が規定値より小さいか否かを判定する。規定値としては、たとえばゴルフヘッドのヘッドスピードが20m/sに相当する周期である約0.31msに相当するカウント値である776回に設定している。すなわち、具体的には、キャプチャレジスタ21aの値がこの規定値より小さいか否かを判定する。周期が規定値より小さい場合(カウント値が776回より小さい場合)には(S320:Yes)、S330へ移行し、周期が規定値以上の場合(カウント値が776回以上の場合)には(S320:No)、S440へ移行する。S330では、オーバーフロー発生回数が0か否かを判定する。0の場合(S330:Yes)、S332へ移行し、0でない場合(非0)(S330:No)、S440へ移行する。
【0077】
S332では、Cを“+1”インクリメントし、S334では、そのインクリメントした新たなCの値が4か否かを判断する。Cの値が4でない、つまり、1から3の場合(S334:No)、S440へ移行し、Cの値が4の場合、C=0にリセットし(S336)したのち、S338に移行する。S338では、第一マイクロコントローラ14は、第二マイクロコントローラ17へ蓄積開始信号を出力する。換言すると、周期が測定値より小さい状態(S320がYes)で、オーバーフローが発生していない(S330がYes)ことが4回発生することで、スイングがされたと判断でき、上記の蓄積開始信号が出力される。このS320〜S338の処理ステップを実行する機能が、スイング判別手段を構成する。
【0078】
このスイング判別手段は、ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別(最終的にS334でYes)している。そして、ヘッドのスイングに対応する周期パターンは、予め各種のクラブを多数の人でスイングして得た周期パターンと、スイングしていない場合に得られる周期パターンとに基づいて、予め決定しておいてもよいし、例えば、利用者のスイングに対応する周期パターンを学習させて利用するようにしてもよい。
【0079】
第一マイクロコントローラ14は、この蓄積開始信号を出力した後、S340に移行する。このS340では、測定状態を「測定中」に変更して、S350へ移行する。S350では、メモリ22上に記憶された立下り発生回数を0に変更する。このようにして、ドップラーセンサ11によって出力されたドップラー信号の周期が所定値より小さくなった場合に、メモリ22への周期データの蓄積を開始する設定を行う。したがって、次のドップラーパルス立下り時の割り込み処理では、S310で「測定中」と判定され、S360以降の処理を行うこととなる。
【0080】
S360では、メモリ上に記憶された立下り発生回数を+1する。続くS370では、オーバーフロー発生回数は0か否かを判定する。オーバーフロー発生回数が0の場合には(S370:Yes)S400へ移行し、オーバーフロー発生回数が0でない場合には(S370:No)S380へ移行する。
【0081】
カウンタ21は16ビットであるので、カウント値が65535を超えるとオーバーフロー割り込みが発生し、オーバーフロー割り込み処理で、オーバーフロー発生回数がインクリメントされることとなる(図4のS110)。カウント値65535は、約26msに相当し、測定対象の値(周期)よりも十分に長いため、オーバーフローが発生すれば、この周期データの記録は行わなくてよいと判断している。
【0082】
S380では、周期が規定値より小さいか否かを判定する。具体的には、キャプチャレジスタ21aの値がこの規定値より小さいか否かを判定する。この規定値は、S320の規定値と同じ776回に設定している。周期が規定値より小さい場合(カウント値が776回より小さい場合)には(S380:Yes)、S390へ移行し、周期が規定値以上の場合(カウント値が776回以上の場合)には(S380:No)、S400へ移行する。S390では、データをメモリ22に記録する。すなわち、キャプチャレジスタ21aの値をメモリ(RAM)22上の配列へ記憶し(前回記録したデータがある場合、前回記憶した配列内の領域の次の領域に記録する)(図5参照)、S400へ移行する。
【0083】
S400では、測定中の立下り発生回数が規定回数に達したか否かを判定し、規定回数に達した場合には(S400:Yes)、S410へ移行し、規定回数に達していない場合には(S400:No)、S440へ移行する。この規定回数(“波数”に相当)は、110回に設定している。この110回は、「測定対象物が前記ドップラーセンサの検知範囲に突入してから測定対象位置に至るまでの距離」として、6mm×110回=66cmに相当する。
【0084】
S410では、メモリ22上の配列への記録済みデータ数が規定数を超えているか否かを判定し、規定数を超えている場合には(S410:Yes)、S420へ移行して、S420で、測定状態を「完了」に変更して、この割り込み処理を終了する。一方、規定数を超えていない場合には(S410:No)、S430へ移行して、S430で、測定状態を「エラー」に変更して、この割り込み処理を終了する。S410での記録済みデータ数の規定数は、“32”に設定している。すなわち、S370の処理においてオーバーフローが発生したと判定された場合(S370:Yes)やS380で周期が規定値以上と判定された場合(S380:No)には、S390の処理は行わず、周期データの配列(メモリ22)への記録をしないので、記録済みデータの個数は110個未満となる場合がある。この場合、後述する図9の速度算出処理に必要な個数として32個に設定しており、この個数を超えている場合には(S410:Yes)、測定状態を「完了」として、速度算出処理を行わせるのに対し、この個数を超えていない場合には(S410:No)測定状態を「エラー」に変更して蓄積済みデータを廃棄し、「開始待ち」状態へ戻る図示しない処理を行わせるようにする。
【0085】
以上のようなドップラーパルスの立下り検出割り込み処理によって、測定状態が「完了」の場合には、速度の算出対象となる周期に関するデータがメモリ(配列)22に33個以上蓄積されることとなる。
【0086】
次に、速度算出処理について、図9を参照して説明する。速度算出処理は、測定状態が「完了」となった場合に開始する。
【0087】
S510では、メモリ22に蓄積された周期データのうち、先頭から蓄積個数までのデータの移動平均を算出し、メモリ(RAM)22に算出結果を格納する。具体的には、周期データ1〜周期データ4の4つのデータで相加平均を求めて、メモリ(RAM)22内の移動平均格納用配列に格納する。つづいて、周期データ2〜周期データ5の4つのデータで相加平均を求めて、メモリ22内の移動平均格納用配列に移動平均周期データとして格納する。以下同様に周期データの相加平均を求めてRAM内の移動平均格納用配列に順次格納する。
【0088】
次に、ばらつきの大きいデータを除外する。すなわち、S510で移動平均の算出に使用された4つの元データの全てが平均値±n%の範囲内にない場合には、そのデータはばらつきが大きいデータ(すなわち測定値の信用性が低いデータ)とみなして、その元データから算出された移動平均値を以降の処理から除外する。
【0089】
具体的には、S520でまず前記nの値を12.5%として、4つの元データの全てが平均値±12.5%の範囲内にない場合には、そのデータはばらつきが大きいデータとみなして、その元データから算出された移動平均値に対して除外フラグをセットする。除外フラグは、例えば移動平均格納用配列に対応する形式で1つの移動平均周期データについて1ビットのメモリ領域を割り当てる。
【0090】
続くS530では、S520での除外処理の結果、除外フラグがセットされていないデータ数(有効データ数)が10個未満の場合には(S530:Yes)除外フラグを解除した後、S540へ移行する。
【0091】
S540では前記nの値を今度は25%として、4つの元データの全てが平均値±25%の範囲内にない場合には、そのデータはばらつきが大きいデータとみなして、その元データから算出された移動平均値に対して除外フラグをセットする。
【0092】
続くS550では、S520での除外処理の結果、除外フラグセットされていないデータ(有効データ数)が10個未満か否かを判定し、10個未満の場合には(S550:Yes)、S560へ移行する。S560では、測定状態を「エラー」に設定して、この処理を終了する。一方、除外フラグセットされていないデータ(有効データ数)が10個以上の場合には(S550:No)、S570へ移行する。また、S530で、除外フラグセットされていないデータ数(有効データ数)が10個以上の場合にも(S550:No)、S570へ移行する。
【0093】
S570では、最小周期データ(周期の最小値=周波数の最大値=最大速度に相当するもの)を、除外フラグのセットされていない移動平均周期データの中から検索する。続くS580では、S570で得られた最小周期データから速度(ヘッドスピード)を算出する。速度の算出は以下の(式1)に基づいて行う。
【数1】
(v:ヘッド速度、c:光速(299792485m/s)、fb:カウンタの基準パルス周波数、f0:マイクロ波ドップラーセンサ出力周波数(24.15GHz)、nmin:最小周期データの値)
【0094】
続くS590では、S580で求めたヘッドスピードを表示器に表示する。たとえば、50.0m/sのように表示する。このとき表示開始から10秒間は、ヘッドスピードの表示を点滅表示させる。10秒間の点滅表示処理が完了したら、S580で求めたヘッドスピードを点灯表示として、S600へ移行する。
【0095】
続くS600では、測定状態を「開始待ち」に変更する。
【0096】
このような構成により、利用者は表示器を見ることで、ヘッドスピードを知ることができる。すなわち、図1に示すように、利用者であるゴルファー1は、ゴルフクラブのヘッドスピード測定装置10を所定位置にセットすると共にスイッチ群16を操作して電源を投入する。次いで、その状態でゴルファー1はゴルフクラブ2のスイングをする。このとき、ボールBをティーアップなどして実際に打ってもよいし、ボールをセットせずに素振りを行っても良い。
【0097】
スイングに伴い、ゴルフクラブ2のヘッド2aがドップラーセンサ11の検知範囲に入ると、そのヘッド2aの移動速度に応じた周期のドップラーパルスが第一マイクロコントローラ14に入力され、それに基づき、各周期のデータがメモリ22に蓄積され、その後、最大速度が計測される。そして、正しく計測が行われた場合、求められたヘッドスピード(瞬間最大速度)が、表示器15に点滅状態で表示される。一方、何らかの原因により正しく計測できなかった場合には、速度表示がされない。よって、利用者は、スイング後に表示器15を見ることで、速度が点滅状態で表示されているか否かにより、計測できたか否か並びに計測できた場合にはその速度を知ることができる。
【0098】
次に、第二マイクロコントローラ17の機能を説明する。第二マイクロコントローラ17は、上記のS338の実行に伴い第一マイクロコントローラ14から蓄積開始信号を受けた場合、アンプ12から出力されたドップラー信号(増幅された信号)を第二マイクロコントローラ17に内蔵するA/D変換器によって、デジタル信号に変換して、内蔵するメモリ(RAM)に160ms分取り込んで蓄積する。取り込みが完了したら、蓄積したメモリ内のデータに対してFFTによる演算を行って速度を算出する。FFTによる演算を行って速度を算出する方法としては、スピードガン等に使用されている公知の方法を用いればよい。そして、算出した速度のデータを、第一マイクロコントローラ14へ送る。
【0099】
すなわち、ゴルフクラブ2のスイングに伴うヘッド2aの移動速度は、スイング開始から徐々に速度が早くなり、ボールに当たる前後付近で最大速度になり、その後、徐々に遅くなる。一方、ボールBは、ゴルフクラブ2のスイング開始当初は、停止したままであるため移動速度は0となり、ヘッド2aが当たって打ち出されることで、移動するため速度が増速する。そして、ヘッドスピードの速度変化のピークと、ボールスピードの速度変化のピークとは、ずれがある(ボールスピードのピークが遅れて発生する)。そこで、スイング判定手段(S320からS328を実行する処理アルゴリズム)にて、ゴルフのスイングを検出して第一マイクロコントローラ14が蓄積開始信号を出力してから、第二マイクロコントローラ17にてボール速度の算出に必要なドップラー信号(アンプ12で増幅した信号)を記録する。
【0100】
これにより、ヘッドスピードはドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを蓄積したデータ群に基づいて算出する一方、ボールスピードは、ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積したA/D変換データ群に基づいて算出する。このようにヘッドの速度とボールの速度を分離することで、ヘッドスピードとボールスピードの双方を正確に測定することができる。
【0101】
さらに第一マイクロコントローラは、第二マイクロコントローラから速度のデータが送られてきた場合、その速度をボールスピードとして表示器15に表示するとともに、自己の算出したヘッドスピードでそのボールスピードを除算した値をミート率として表示器に表示する。
【0102】
すなわち、第一マイクロコントローラ14は、
ミート率=ボールスピード/ヘッドスピード
によりミート率を算出する。
【0103】
また、推定飛距離は、実際にボールを打った場合には、ボールスピードと使用したクラブ種から飛距離を求め、素振りの場合にはヘッドスピードと使用したクラブ種から飛距離を求める。具体的には、予めクラブ種ごとにボールスピードに対する係数とベッドスピードに対する係数を設定しておき(クラブ種−係数のテーブル等を設ける)、ボールスピード或いはヘッドスピードに、クラブ種に対応する係数を乗じた値を推定飛距離とする。なお、ボールの有無は、マニュアル操作による手動によって指定しても良いし、各種のセンサを設け装置により自動的に認識するようにしてもよい。
【0104】
また測定モードの場合、モードセレクトボタンB2の“短押し”により、表示パラメータの選択を行う。すなわち、図3に示すように、表示器15の下方領域に、7セグメントを利用した3桁の数値表示部位を2列用意し、上段をスピード(ヘッドスピード/ボールスピード)、下段を“推定飛距離”か“ミート率”のいずれかを表示する。よって、表示パターンとしては、“ヘッドスピード&推定飛距離”,“ボールスピード&ミート率”,“ボールスピード&推定飛距離”の3種類が用意され、クラブ種でパター以外が選択されている場合、モードセレクトボタンB2の“短押し”により、”ヘッドスピード&推定飛距離”もしくは”ボールスピード&ミート率”のどちらかが交互に選択される。また、パターを選択した場合は強制的に”ボールスピード&推定飛距離”のみとなる。
【0105】
第一マイクロコントローラ14は、現在表示している種類を表示器15に報知する。つまり、上段では、“HEADSPEED”と“BALLSPEED”のいずれか一方を表示し、下段では、“MEET”(ミート率の場合)と“DIST”(推定飛距離の場合)のいずれか一方を表示する。
【0106】
また、クラブセレクトボタンB3とモードセレクトボタンB2を同時押しした場合、第一マイクロコントローラ14は、速度単位を切り替える。本実施形態で用意された速度表示単位は、“m/s”(メートル/秒)と“mph”(マイル/時)の2種類用意している。第一マイクロコントローラ14は、選択された速度表示単位を表示器15に表示する。
【0107】
クラブセレクトボタンB3は、使用するクラブに合わせて、そのクラブ種を選択・指定するためのボタンである。これにより、第一マイクロコントローラ14は、選択されたクラブ種とヘッドスピードやボールスピード等の情報から、推定飛距離を算出することができる。具体的には、第一マイクロコントローラ14は、クラブセレクトボタンB3の“短押し”を認識すると、下記の順でクラブ種を巡回させる。
「1W→3W→5W→3I→4I→5I→6I→7I→8I→9I→W(ウエッジ)→Pt(パター)」
【0108】
また、第一マイクロコントローラ14は、このクラブ種の巡回に合わせて、表示器15の右上のクラブ種表示エリアに、“W,I,tと7セグメント”を適宜用いて現在選択されているクラブ種を表示する。つまり、ウッド(1W,3W,5W)が選択されている場合には、“W”と選択された数字を表示し、アイアン(3I,4I,5I,6I,7I,8I,9I)が選択されている場合には、“I”と選択された数字を表示し、ウエッジ(W)が選択されている場合には、“W”のみを表示し、パター(Pt)が選択されている場合には、“t”のみを表示する(7セグメントを使ってPを併設表示しても可)。
【0109】
このクラブ種は、推定飛距離算出の際、係数の参照条件となるため、スイング前に予め選択しておく。なお、Pt(パター)選択時は、推定飛距離の単位は自動的に”m”(メートル)となる。
【0110】
また、本実施形態では、1周期ごとのデータに基づいて速度を算出しているとともに、誤検出のおそれのあるデータは破棄し、最終的に残った信頼性のあるデータに基づいて速度を求めているので、表示される速度は、周囲の状況等に影響を受けない正確なものとなる。また、実際にボールをヒットした状態でヘッドスピードを測定した場合、ボールはインパクト後に勢いよく飛び出していくため、当該ボールの移動速度はヘッドスピードよりも十分に高速度となり、ドップラーセンサ11の出力は係るボールの移動に基づくものとなるおそれがあるが、ゴルフクラブ2のヘッド2aがドップラーセンサ11の検知範囲に突入してからボールにインパクトすると想定される位置までの距離の間に発生するドップラー信号の波数に相当する110回の規定回数分しかメモリ22に周期データを蓄積しない構成であるため、ボールの有無に関係なく、スイングスピードを正しく測定できる。
【0111】
なお、ボールスピード算出手段である第二マイクロコントローラ17は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とするとよい。
【0112】
すなわち、ドップラーセンサ11や、第一マイクロコントローラ14(スイング判別手段と第一蓄積手段とヘッドスピード算出手段)には電力を常に供給する一方、第二マイクロコントローラ17(第二蓄積手段とボールスピード算出手段)には、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、電力の供給を停止し、次にスイング判別手段たる第一マイクロコントローラ14によってヘッドのスイングがあったと判別されたら、第二マイクロコントローラ17への電力の供給を再開するようにするとよい。あるいは、ドップラーセンサ11と第一マイクロコントローラ14には電力を常に供給する一方、第二マイクロコントローラ17は、ボールスピードの算出が完了し、算出したボールスピードのデータの出力が完了したら、省電力モードに入り、次に第一マイクロコントローラ14によってヘッドのスイングがあったと判別されたら、省電力モードから通常モードに切り替えるようにしてもよい。
【図面の簡単な説明】
【0113】
【図1】利用態様の一例を示す図である。
【図2】利用態様の一例を示す図である。
【図3】本発明に係る速度測定装置の好適な一実施形態の外観を示す平面図である。
【図4】本発明にかかる速度測定装置の好適な一実施形態を示すブロック図である。
【図5】マイクロコントローラの内部構成を示す図である。
【図6】マイクロコントローラのオーバーフロー発生諸機能を示すフローチャートである。
【図7】マイクロコントローラのドップラーパルス立下がり検知処理機能を示すフローチャートである。
【図8】マイクロコントローラのドップラーパルス立下がり検知処理機能を示すフローチャートである。
【図9】マイクロコントローラの速度算出処理機能を示すフローチャートである。
【符号の説明】
【0114】
10 ヘッドスピード測定装置
11 ドップラーセンサ
12,12a アンプ
13,13aコンパレータ
14 第一マイクロコントローラ
15 表示器
16 スイッチ群
17 第二マイクロコントローラ
20 筐体
21 カウンタ
22 メモリ
【特許請求の範囲】
【請求項1】
ドップラー信号を出力するドップラーセンサと、
前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを複数個蓄積可能な第一蓄積手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づき当該ドップラー信号の周期に関するデータを得て前記第一蓄積手段への蓄積を行い、前記第一蓄積手段に蓄積されたデータ群に基づきゴルフクラブのヘッドスピードを算出するヘッドスピード算出手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積可能な第二蓄積手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て前記第二蓄積手段への蓄積を行い、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出するボールスピード算出手段と
を備える速度測定装置であって、
前記ゴルフクラブのスイングがあったか否かを判別するスイング判別手段を備え、
前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始し、
前記ボールスピード算出手段は、前記スイング判別手段によってヘッドのスイングがあったと判別された場合に、前記第二蓄積手段へのA/D変換データの蓄積を開始すること
を特徴とする速度測定装置。
【請求項2】
前記周波数スペクトル解析は、高速フーリエ変換で行うこと
を特徴とする請求項1に記載の速度測定装置。
【請求項3】
前記スイング判別手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別すること
を特徴とする請求項1または2のいずれかに記載の速度測定装置。
【請求項4】
前記ボールスピード算出手段は、前記第二蓄積手段へのA/D変換データの蓄積の開始後、所定期間分のA/D変換データの蓄積を行った後、当該A/D変換データの蓄積を終了し、当該蓄積の終了後に、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出すること
を特徴とする請求項1〜3のいずれかに記載の速度測定装置。
【請求項5】
前記ボールスピード算出手段は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とすること
を特徴とする請求項1〜4のいずれかに記載の速度測定装置。
【請求項6】
測定対象がパターとパター以外のクラブのいずれであるかを設定する測定対象設定手段と、
前記ドップラーセンサによって出力されたドップラー信号の増幅を行う増幅手段を備え、
前記増幅手段は、前記測定対象設定手段によって前記測定対象としてパターが設定された場合には当該ドップラー信号の通過帯域を、前記測定対象としてパター以外が選択された場合の当該ドップラー信号の通過帯域よりも低い周波数帯域にすること
を特徴とする請求項1〜5のいずれかに記載の速度測定装置。
【請求項7】
携帯可能な筐体に組み込まれ、電池によって駆動されること
を特徴とする請求項1〜6のいずれかに記載の速度測定装置。
【請求項1】
ドップラー信号を出力するドップラーセンサと、
前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを複数個蓄積可能な第一蓄積手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づき当該ドップラー信号の周期に関するデータを得て前記第一蓄積手段への蓄積を行い、前記第一蓄積手段に蓄積されたデータ群に基づきゴルフクラブのヘッドスピードを算出するヘッドスピード算出手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを蓄積可能な第二蓄積手段と、
前記ドップラーセンサによって出力されたドップラー信号に基づくA/D変換データを得て前記第二蓄積手段への蓄積を行い、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出するボールスピード算出手段と
を備える速度測定装置であって、
前記ゴルフクラブのスイングがあったか否かを判別するスイング判別手段を備え、
前記ヘッドスピード算出手段は、前記ドップラーセンサによって出力されたドップラー信号の周期が所定値より小さくなった場合に、前記第一蓄積手段への前記周期に関するデータの蓄積を開始し、
前記ボールスピード算出手段は、前記スイング判別手段によってヘッドのスイングがあったと判別された場合に、前記第二蓄積手段へのA/D変換データの蓄積を開始すること
を特徴とする速度測定装置。
【請求項2】
前記周波数スペクトル解析は、高速フーリエ変換で行うこと
を特徴とする請求項1に記載の速度測定装置。
【請求項3】
前記スイング判別手段は、前記ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期がヘッドのスイングに対応する周期パターンになった場合に、ヘッドのスイングあったと判別すること
を特徴とする請求項1または2のいずれかに記載の速度測定装置。
【請求項4】
前記ボールスピード算出手段は、前記第二蓄積手段へのA/D変換データの蓄積の開始後、所定期間分のA/D変換データの蓄積を行った後、当該A/D変換データの蓄積を終了し、当該蓄積の終了後に、前記第二蓄積手段に蓄積されたA/D変換データに対する周波数スペクトル解析を行ってボールスピードを算出すること
を特徴とする請求項1〜3のいずれかに記載の速度測定装置。
【請求項5】
前記ボールスピード算出手段は、ボールスピードの算出後、次に前記スイング判別手段によってヘッドのスイングがあったと判別されるまで、所定の低消費電力状態とすること
を特徴とする請求項1〜4のいずれかに記載の速度測定装置。
【請求項6】
測定対象がパターとパター以外のクラブのいずれであるかを設定する測定対象設定手段と、
前記ドップラーセンサによって出力されたドップラー信号の増幅を行う増幅手段を備え、
前記増幅手段は、前記測定対象設定手段によって前記測定対象としてパターが設定された場合には当該ドップラー信号の通過帯域を、前記測定対象としてパター以外が選択された場合の当該ドップラー信号の通過帯域よりも低い周波数帯域にすること
を特徴とする請求項1〜5のいずれかに記載の速度測定装置。
【請求項7】
携帯可能な筐体に組み込まれ、電池によって駆動されること
を特徴とする請求項1〜6のいずれかに記載の速度測定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−25737(P2010−25737A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−187125(P2008−187125)
【出願日】平成20年7月18日(2008.7.18)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月18日(2008.7.18)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]