
速度算出方法、速度算出装置およびコンピュータプログラム
【課題】簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置を提供する。
【解決手段】速度算出装置100は、加速度センサ10、Acc積算部20および制御部50を備えている。加速度センサ10は、歩行または走行する対象者の加速度を計測する。Acc積算部20は、加速度センサ10が計測した加速度を、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める。制御部50は、予め求められた近似式に合成積算値Accを適用して対象者の速度vを算出する。低負荷の演算により、実用的な精度で対象者の速度vが算出される。
【解決手段】速度算出装置100は、加速度センサ10、Acc積算部20および制御部50を備えている。加速度センサ10は、歩行または走行する対象者の加速度を計測する。Acc積算部20は、加速度センサ10が計測した加速度を、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める。制御部50は、予め求められた近似式に合成積算値Accを適用して対象者の速度vを算出する。低負荷の演算により、実用的な精度で対象者の速度vが算出される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象者の歩行速度または走行速度を算出する速度算出方法、速度算出装置、および速度算出装置のためのコンピュータプログラムに関する。
【背景技術】
【0002】
ウォーキングやジョギングをする人にとって、その歩行速度や走行速度をリアルタイムで知ることが重要である。
【0003】
移動する対象者の速度を計測するための複数通りの手段がこれまで提案されている。人工衛星から送られてくる信号を利用したGPS(Global Positioning System)速度計や、加速度センサの計測結果から速度を算出する速度計が知られている。GPS速度計は、人工衛星との通信機能を必要とするため装置構成が簡易ではない。GPS速度計は測位精度が高くないため、ウォーキングやジョギング程度の低速で移動する人間の速度を実用的な精度で測定することは困難である。
【0004】
加速度センサを用いる速度計を測定原理に基づいて大別すると、歩数のカウント値から速度を算出するもの(特許文献1)と、加速度波形の周波数解析から求めた歩行周期に基づいて速度を算出するもの(特許文献2)とが知られている。
【0005】
特許文献1の装置は、予め設定しておいた歩幅の長さを歩数のカウント値に乗じて歩行距離を推定し、これを計測時間で割って速度を求める。特許文献2の装置は、計測された加速度波形を周波数解析してパワースペクトルを求め、そのピーク値から統計的に歩幅を算出する。この装置は、パワースペクトルのピーク値をとる周波数から歩行周期を算出して、両者の積により歩行速度を算出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−164571号公報
【特許文献2】特開2004−358229号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の装置は、対象者の歩幅を予め一定値(たとえば60cmなど)に設定しておく必要があることから、速度の演算精度が低いという問題がある。歩行速度と歩幅との関係は対象者によって様々なためである。すなわち、対象者の中には、速く歩こうとするときに、歩行周期(ピッチ)を変えずに歩幅を広げるタイプの人達と、歩行周期を増やす人達とが存在する。特許文献1の装置ではこの歩幅の変化が無視されてしまうため、歩行速度の変化が算出されない。このため、歩行周期(ピッチ)を変えずに歩行速度を変化させるタイプの人達が対象者である場合には、特許文献1の装置では実用的な精度で歩行速度を算出することは困難である。特許文献1の装置による測定誤差が大きいことは後述する比較例にて説明する。
【0008】
特許文献2の装置では、加速度波形を周波数解析する必要があるため演算負荷が大きく、歩行速度をリアルタイムで知ることは困難である。特許文献2の装置は、運動する対象者の加速度を記録しておき、運動後にコンピュータを用いて周波数解析するものである。特許文献2の装置を用いて歩行速度をリアルタイムで知るためには、十分な能力の演算処理装置(CPU)と消費電力を要することとなり簡便ではない。
【0009】
これらの課題は、対象者が歩行している場合も走行している場合も共通に発生する。本発明は上述のような課題に鑑みてなされたものであり、簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置を提供するものである。
【課題を解決するための手段】
【0010】
本発明の速度算出方法は、歩行または走行する対象者の加速度を計測し、前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする。
【0011】
本発明の速度算出装置は、歩行または走行する対象者の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式を記憶しておく記憶手段と、前記記憶手段を参照し、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える。
【0012】
本発明のコンピュータプログラムは、歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、前記速度算出処理が、前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を含むコンピュータプログラムである。
【発明の効果】
【0013】
本発明によれば、簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置が提供される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態にかかる速度算出装置を示す機能ブロック図である。
【図2】速度算出装置の正面図である。
【図3】合成加速度の波形および合成積算値を表す模式図である。
【図4】実施形態にかかる速度算出方法の全工程を示すフローチャートである。
【図5】速度算出ステップの詳細工程を示すフローチャートである。
【図6】(a)〜(c)は実施例1−1から1−3の結果を示すグラフである。
【図7】(a)〜(c)は実施例2−1から2−3の結果を示すグラフである。
【図8】(a)〜(c)は実施例3−1から3−3の結果を示すグラフである。
【図9】(a)〜(c)は比較例1−1から1−3の結果を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を図面に基づいて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。
【0016】
以下の実施形態を通じて本発明の速度算出方法を説明するにあたり、複数の工程を順番に記載する場合があるが、その記載の順番は必ずしも各工程を実行する順番やタイミングを限定するものではない。本発明の速度算出方法を実施するときには、その複数の工程の順番は、技術的に支障のない範囲で変更することができ、また複数の工程の実行タイミングの一部または全部が互いに重複していてもよい。
【0017】
本発明の速度算出装置を実現するための各種の構成要素は、それらの機能を実現するものであるかぎり、具体的なハードウェア構成は特に限定されない。たとえば、所定の機能を発揮する専用のハードウェア、所定の機能がコンピュータプログラムにより付与されたデータ処理装置、コンピュータプログラムによりデータ処理装置に実現された所定の機能、これらの任意の組み合わせ、等により本発明の各種の構成要素を実現することができる。より具体的には、コンピュータプログラムを読み取って対応する処理動作を実行できるように、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/F(Interface)ユニット、等の汎用デバイスで構築されたハードウェア、所定の処理動作を実行するように構築された専用の論理回路、これらの組み合わせ、等を用いて本発明を実施することができる。
【0018】
特に、本発明を構成する速度の近似式は、記憶装置に記憶された係数、入力値と出力値とが当該近似式を満たすテーブル、当該近似式に対応する専用の論理回路、などによって実現することができる。
【0019】
(速度算出装置)
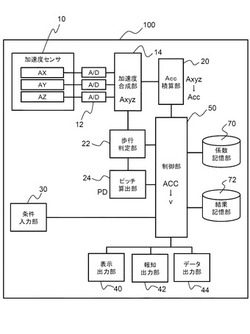
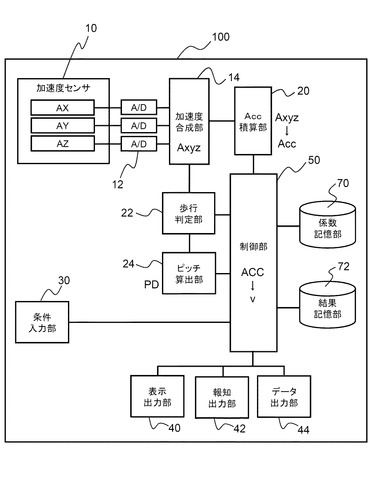
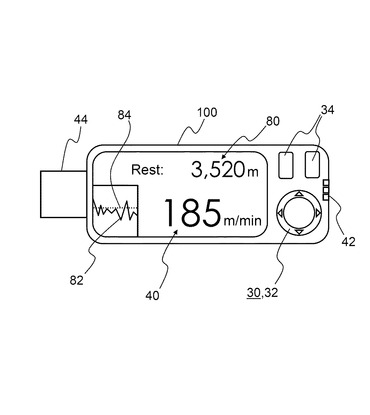
図1は、本発明の実施形態にかかる速度算出装置100を示す機能ブロック図である。図2は本実施形態の速度算出装置100の正面図である。
【0020】
はじめに、本実施形態の概要について説明する。速度算出装置100は、加速度センサ10、Acc積算部20および制御部50を備えている。
【0021】
加速度センサ10は、歩行または走行する対象者の加速度を計測する手段である。加速度センサ10は、一軸、直交二軸または直交三軸の加速度を計測する。
【0022】
加速度センサ10が一軸センサである場合、計測方向が重力方向、すなわち対象者の上下方向に一致するようにして加速度センサ10を対象者に装着する。加速度センサ10の二つの計測方向が直交する直交二軸センサである場合は、一方の計測方向を重力方向に一致させて加速度センサ10を対象者に装着する。そして他方の計測方向を、対象者の歩行(走行)方向の前後または左右方向に一致させるとよい。歩行や走行においては、主に上下方向の振動に起因する加速度が検出されるため、上下方向を計測方向とするとよい。
【0023】
加速度センサ10の三つの計測方向が互いに直交する直交三軸センサである場合は、対象者に対して加速度センサ10を任意の向きに装着することができる。以下、加速度センサ10が、対象者の直交三軸方向の加速度を計測する場合を例に説明する。
【0024】
Acc積算部20は、加速度センサ10が計測した加速度を合成した合成加速度Axyzを、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める積算手段である。制御部50は、予め求められた近似式に合成積算値Accを適用して対象者の速度vを算出する速度演算手段である。なお、加速度センサ10が一軸センサである場合、合成積算値Accは、加速度センサ10が計測した加速度を単位時間UTに亘って積算して合成積算値Accを求める。
【0025】
次に、本実施形態について詳細に説明する。ただし、以下に説明する合成加速度Axyzの合成方法、合成積算値Accの算出方法、歩行判定部22による歩行の判定方法などの各種の演算方法は例示であり、本発明はこれらに限定されるものではない。
【0026】
速度算出装置100は可搬性をもち、対象者(ユーザ)の体もしくは衣服に装着するか、または対象者が鞄に入れて持ち運ぶことが可能である。速度算出装置100は、歩行または走行する対象者の進行方向の移動速度(歩行速度または走行速度)を近似演算により算出する。以下、歩行と走行とを区別せずに歩行と表現する場合がある。
【0027】
本実施形態の速度算出装置100は、算出した速度vを表示出力部40で表示出力する。速度vを示す速度データは結果記憶部72に記録されている。速度データは、データ出力部44からコンピュータ装置(図示せず)によって読み出される。
【0028】
本実施形態に代えて、算出した速度vを用いて他の物理量(たとえば、歩行距離)を演算し、当該他の物理量を表示出力部40で表示出力してもよい。言い換えると、本実施形態の速度算出装置100は、対象者の速度vを算出して出力するか、または他の物理量を演算する過程において対象者の速度vを算出する。
【0029】
本実施形態では、算出された速度vの数値を表示出力部40で表示出力する。速度vの履歴を速度履歴表示部82で表示出力する。速度履歴表示部82は、算出された速度vを経時的にグラフ化して表示する表示手段である。
【0030】
本実施形態の制御部50は、速度vを積分して歩行(走行)距離を算出する。図2に示す距離表示部80は、この歩行(走行)距離、または残り距離を表示する。残り距離は、予め設定した目標距離TLから歩行(走行)距離を減じた値である。
【0031】
条件入力部30は、対象者が各種の条件を入力するためのインタフェースである。条件入力部30はダイヤル32やボタン34(図2を参照)により構成される。
【0032】
報知出力部42は、予め設定された目標速度TVと算出された速度vとの差分値VDが所定の乖離閾値を超えた場合に報知出力を行う手段である。報知出力の態様は特に限定されず、音声、シグナルまたはパルスが例示される。報知出力部42としては、スピーカー、シグナル発信機またはパルス加振器が例示される。算出された速度vと目標速度TVとの差分値が所定以上となったことを報知出力部42で報知することにより、対象者は目標のペースを維持することができる。目標速度表示部84は、予め設定した目標速度TVをグラフ表示する表示手段である。
【0033】
加速度センサ10は、互いに直交するX軸方向加速度AX、Y軸方向加速度AY、Z軸方向加速度AZを、それぞれアナログまたはデジタルデータとして取得する。対象者の天頂方向や歩行方向と、加速度センサ10の任意の軸とを一致させる必要はない。対象者は速度算出装置100を任意の向きで装着または保持して歩行すればよい。
【0034】
A/D変換部12は、加速度センサ10の各軸の出力波形を所定の時間間隔でサンプリングして、加速度データ(デジタルデータ)を取得する。加速度合成部14は、A/D変換部12で取得した直交三軸方向の加速度データを合成して、合成加速度Axyzを算出する。合成加速度Axyzは、AX、AY、AZの二乗和平方根である。
【0035】
Acc積算部20は、合成加速度Axyzを所定の単位時間UTに亘って積算することにより合成積算値Accを算出する。
【0036】
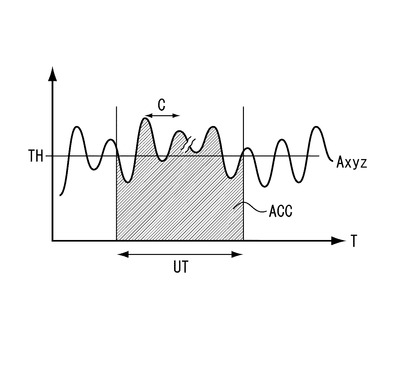
図3は、合成加速度Axyzの波形および合成積算値Accを表す模式図である。横軸は時刻T、縦軸は加速度である。加速度センサ10からの入力が非ゼロの場合、合成加速度Axyzは正の値をとる。合成積算値Accは、単位時間UTに亘って合成加速度Axyzを積算した値であり、言い換えると合成加速度Axyzの曲線下面積に相当する。
【0037】
加速度合成部14は、アナログまたはデジタルのローパスフィルタを備えている。人間の走行ピッチの上限は240歩/分=4歩/秒=4Hz程度である。これよりも十分に高い周波数の加速度ノイズを加速度合成部14は合成加速度Axyzから除去する。これにより、Acc積算部20で算出される合成積算値Accの再現性が向上する。
【0038】
単位時間UTは、対象者の歩行周期Cよりも十分に長い。具体的には、単位時間UTは、歩行周期Cの10倍以上、好ましくは50倍以上に設定されている。単位時間UTが歩行周期Cよりも十分に長いことにより、測定因子に基づく合成積算値Accの算出誤差が低減される。測定因子としては、単位時間UTの開始時刻の選定、加速度センサ10の計測ノイズ、対象者の歩行の乱れ、などが挙げられる。
【0039】
単位時間UTが過大であると歩行開始から速度算出までに長時間を要する。単位時間UTが過大であると、対象者の歩行速度が急激に変化した場合でも合成積算値Accの変化が緩和されるため、速度の算出結果が鈍ることとなる。本実施形態の速度算出装置100では、単位時間UTが60秒に設定されている。人間の一般的な歩行周期Cが1歩/秒(ゆっくりとした歩行時)から4歩/秒(高速走行時)であることから、本実施形態の単位時間UTは歩行周期Cの15倍から60倍に設定されていることとなる。
【0040】
図1に戻り、制御部50はCPUを含む情報処理手段である。制御部50は、係数記憶部70を参照して、予め求められた下記の近似式(1)または(2)を取得する。制御部50は、取得した近似式(1)または(2)に合成積算値Accを適用して、対象者の速度vを算出する。近似式(1)、(2)がいずれも速度v(歩行速度および走行速度)と高い相関を有していることは、後述する実施例にて説明する。
【0041】
【数1】

【0042】
【数2】
【0043】
近似式(2)の第1項は、切片(γ)を除く他の項(第2項)よりも大きな値となる支配項である。近似式(2)の支配項(第1項)は、合成積算値Accの累乗根に比例する項である。累乗根は、底(合成積算値Acc)の1/N乗(ただし、N>1)で表される。
【0044】
近似式(2)は、支配項である第1項と、歩数PDに比例する第2項と、を含む。歩数PDは単位時間UTあたりの歩数値である。
【0045】
近似式(1)、(2)の末項(切片)は定数項γである。
【0046】
近似式における支配項は、複数の説明変数をもつ場合、すなわち切片以外の項が複数存在する場合に、説明変数のt値の絶対値(|t値|)が最大となる項である。本実施形態では近似式(2)がこれに該当する。本発明においては、1つの説明変数からなる近似式の場合、すなわち切片以外の項が1つの場合に、当該説明変数の項を支配項という。本実施形態では近似式(1)および後述する近似式(3)がこれにあたる。
【0047】
より具体的には、近似式(2)の支配項(第1項)は、合成積算値Accと対象者の身長Hとの積の累乗根である。言い換えると、近似式(2)の演算は、合成積算値Accの二乗根(N=2)と、対象者の身長Hの二乗根と、を乗じることを含む。すなわち、近似式(2)の支配項は、合成積算値Accの二乗根と、対象者の身長Hの二乗根との積に比例する。身長Hの単位系はセンチメートルでもメートルでもインチでもよい。これらの単位系の相違は、第1項の係数αの設定により調整される。
【0048】
速度算出装置100の歩行判定部22は、合成加速度Axyzに基づいて歩行または走行の発生を判定する。歩行判定部22は、合成加速度Axyzの極大値に基づいて歩行と走行とを識別する。ピッチ算出部24は、所定時間(たとえば単位時間UT)ごとの歩数PDを計数して、その値を制御部50に送る。
【0049】
係数記憶部70は近似式(1)、(2)を記憶しておく手段である。本実施形態において係数記憶部70が近似式(1)、(2)を記憶するとは、係数記憶部70が、近似式(1)、(2)の係数α、β、γ、単位時間UTおよびカウント閾値THを記憶することをいう。対象者の身長Hは、条件入力部30を通じて対象者から受け付ける。
【0050】
加速度センサ10が直交三軸センサである場合の係数α、β、γと、加速度センサ10が一軸センサである場合の係数α、β、γと、直交二軸センサである場合の係数α、β、γとは、互いに相違する。係数記憶部70には、加速度センサ10の計測方向の数(本実施形態の場合は3つ)に対応する係数α、β、γが記憶されている。
【0051】
速度算出装置100においては、近似式(1)または(2)のいずれか一方に基づいて速度vを算出すればよい。近似式(1)と(2)とが選択可能であって、対象者による条件入力部30の操作入力その他の条件に応じて近似式(1)または(2)を選択し、当該式に基づいて速度vを算出してもよい。
【0052】
本実施形態においては、対象者の歩行ピッチに応じて、近似式(1)または(2)の第1項の係数αの値を相違させてもよい。実施例を用いて後述するように、歩行時の係数αよりも走行時の係数αを大きく設定することで、速度vを更に高い確度で算出することができる。歩行時の合成積算値Accは走行時の合成積算値Accよりも小さい。合成積算値Accの大小に応じて係数αを相違させてもよい。すなわち、合成積算値Accが所定の閾値未満である場合に支配項(第1項)に乗じる係数α(第一係数α1)と、合成積算値Accが所定の閾値以上である場合に支配項(第1項)に乗じる係数α(第二係数α2)と、を相違させてもよい。第二係数α2は第一係数α1よりも大きいことが好ましい。
【0053】
本実施形態に代えて、合成積算値Accの大小ではなく、歩行判定部22から制御部50に送信された判定情報に基づいて、制御部50は歩行と走行とを識別してもよい。この場合、制御部50は、歩行時の第一係数α1または走行時の第二係数α2を選択する。
【0054】
上記実施形態では合成積算値Accの累乗根を含む近似式(1)、(2)を例示した。ただし、合成積算値Accを含むかぎり、本発明で用いる近似式は上記に限られない。以下の近似式(3)のように合成積算値Accの一次関数を用いてもよい。近似式(3)において、Wtは対象者の体重である。この近似式(3)によっても速度vが実用的な精度で算出できることを実施例3として後述する。
【0055】
【数3】
【0056】
(速度算出方法)
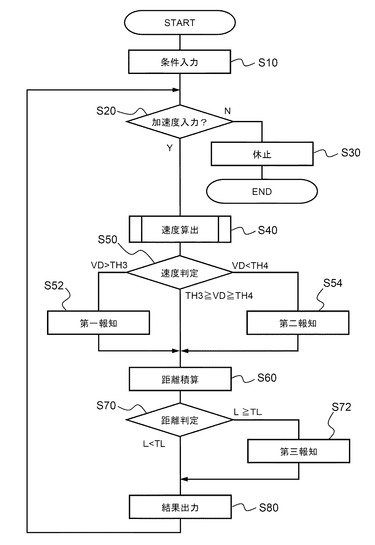
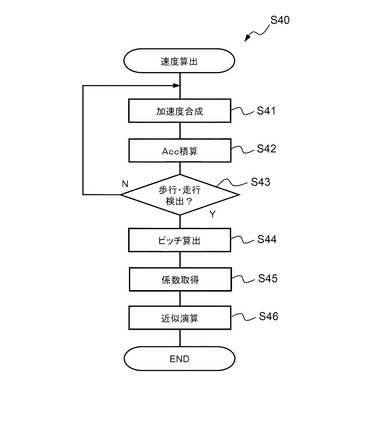
以下、本実施形態の速度算出装置100を用いて行う速度算出方法(以下、本方法という場合がある)について説明する。図4は、本方法の全工程を示すフローチャートである。図5は、速度算出ステップS40の詳細工程を示すフローチャートである。
【0057】
はじめに、本方法の概要について説明する。
【0058】
本方法では、速度算出装置100は、歩行または走行する対象者の加速度を計測する。具体的には、対象者の直交三軸方向の加速度を計測する(図4:ステップS20=Y)。なお、重力方向を軸方向とする一軸方向の対象者の加速度を計測するか、または軸方向および当該軸方向と直交する方向からなる直交二軸方向の対象者の加速度を計測してもよい。速度算出装置100は、これらの三軸方向の加速度計測値に任意でローパスフィルタ処理を施したうえで互いに合成して合成加速度Axyzを算出する(図5:ステップS41)。速度算出装置100は、この合成加速度Axyzを、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める(図5:ステップS42)。速度算出装置100は、予め求められた近似式(1)または(2)に合成積算値Accを適用して、対象者の速度vを算出する(図5:ステップS46)。
【0059】
以下、本方法をより具体的に説明する。
【0060】
条件入力ステップS10では、条件入力部30は、速度を測定する対象者から各種の入力を受け付ける。対象者は、ダイヤル32およびボタン34などの条件入力部30(図2を参照)を操作して、身長H、体重Wt、目標速度TV、目標距離TLを入力する。
【0061】
対象者は、速度算出装置100を装着して所定の速度で歩行または走行する。加速度入力ステップS20では、速度算出装置100は、加速度センサ10またはA/D変換部12から、X,Y,Z軸方向の加速度AX,AY,AZの計測値が出力されたか否かを判定する。加速度AX,AY,AZの計測値が出力された場合には(図4:ステップS20=Y)、速度算出ステップS40に遷移する。加速度AX,AY,AZの計測値が出力されない場合、対象者が静止しているものと推定して速度算出装置100は休止モードとなる(図4:ステップS30)。休止モードが所定時間に亘って継続した場合は、速度算出装置100は電源をオフにするなどして一連の処理を終了する。
【0062】
速度算出ステップS40では、加速度合成部14は、図5に示すように、直交三軸方向の加速度データを合成して合成加速度Axyzを生成する(図5:ステップS41)。加速度合成部14は、ローパスフィルタを用いて合成加速度Axyzから高周波ノイズを除去する。
【0063】
つぎに、Acc積算部20は、合成加速度Axyzを所定の単位時間UTに亘って積算して合成積算値Accを算出する(図5:ステップS42)。Acc積算部20は係数記憶部70を参照して単位時間UTを取得し、所定のサンプリング周期で合成加速度Axyzをデジタル化し、これを積算していく。Acc積算部20は、対象者が歩行または走行している間、合成加速度Axyzのサンプリングを継続する。任意の時刻における合成積算値Accは、単位時間UTだけ遡った過去時点から当該時刻までにサンプリングされた合成加速度Axyzの積算値である。Acc積算部20は、合成積算値Accを時々刻々更新していく。
【0064】
歩行判定部22は、加速度合成部14が合成した合成加速度Axyzが所定のカウント閾値TH(図3を参照)に達したことを検知する。ピッチ算出部24は、歩行判定部22の検知結果に基づいて歩数を算出する。
【0065】
より具体的には、歩行判定部22は、第一条件と第二条件とが同時に満足した場合に、歩行または走行が発生したものと推定して(図5:ステップS43=Y)、歩数PDをインクリメントする。第一条件は、合成加速度Axyzの値がカウント閾値TH未満からカウント閾値TH以上に遷移するという条件である。第二条件は、前回の当該遷移からの経過時間が所定範囲(たとえば、0.25秒以上1秒以下)であるという条件である。歩行または走行が検出されなかった場合には(図5:ステップS43=N)、加速度合成部14は加速度センサ10からの加速度AX,AY,AZを再度取得して、これらを合成する(図5:ステップS41)。
【0066】
ピッチ算出部24は、所定時間(たとえば単位時間UT)ごとの歩数PDを計数して(図5:ステップS44)、その値を制御部50に送る。歩行判定部22は、合成加速度Axyzの極大値に基づいて歩行と走行とを識別する。具体的には、合成加速度Axyzの極大値が所定の加速度閾値よりも大きい場合には、歩行判定部22はその動作を走行と判定する。歩行判定部22による歩行・走行の判定結果を示す判定情報は制御部50に送信される。
【0067】
なお、ステップS42と、ステップS43〜S44とは、いずれを先に実行してもよく、またはこれらを互いに重複するタイミングで実行してもよい。
【0068】
制御部50は、近似式の係数α、β、γのうち必要なものを係数記憶部70から取得する(図5:ステップS45)。実施例で後述するように、歩行時と走行時とで異なる係数αを用いることで速度vの算出精度が向上する。制御部50は、歩行判定部22およびピッチ算出部24から送信された結果に基づいて係数α、β、γを取得するとよい。
【0069】
制御部50は、取得した係数α、β、γ、身長H、体重Wtのいずれかで構成される近似式と、合成積算値Accおよび歩数PDに基づいて速度vを算出する(図5:ステップS46)。
【0070】
具体的には、制御部50は、係数記憶部70を参照して取得した係数αおよびγ、Acc積算部20から取得した合成積算値Acc、ならびに対象者から受け付けた身長Hに基づいて、近似式(1)に従って速度vを算出する。
【0071】
制御部50は、係数記憶部70を参照して取得した係数α、βおよびγ、Acc積算部20から取得した合成積算値Acc、対象者から受け付けた身長H、ならびにピッチ算出部24から取得した歩数PDに基づいて、近似式(2)に従って速度vを算出してもよい。制御部50は、係数記憶部70を参照して取得した係数αおよびγ、Acc積算部20から取得した合成積算値Acc、ならびに対象者から取得した体重Wtに基づいて、近似式(3)に従って速度vを算出してもよい。
【0072】
以上で速度算出ステップS40を終了する。
【0073】
対象者の速度vが算出されると、制御部50は、その値を目標速度TVと対比する。本方法では、制御部50は、速度v−目標速度TVで定義される差分値VDと、正の乖離閾値TH3および負の乖離閾値TH4と、の大小判定を行う(図4:ステップS50)。
【0074】
差分値VDがTH4以上かつTH3以下であった場合には(ステップS50:TH3≧VD≧TH4)、対象者がほぼ目標速度TVを維持している通常ペースと判断して報知は行わずに次のステップS60に到る。差分値VDがTH3を超えていた場合には(ステップS50:VD>TH3)、対象者が目標速度TVを超過しているオーバーペースと判断して、報知出力部42は第一の報知態様による報知出力を行う(図5:ステップS52)。差分値VDがTH4よりも小さい場合には(ステップS50:VD<TH4)、対象者が目標速度TVよりも遅いアンダーペースと判断して、報知出力部42は第二の報知態様による報知出力を行う(図5:ステップS54)。第二の報知態様は、第一の報知態様よりもアップテンポのシグナルなど、対象者のペースアップを促す出力が好ましい。
【0075】
距離積算ステップS60では、制御部50は、速度vを積算(積分)することで歩行(走行)距離Lを算出する。
【0076】
距離判定ステップS70では、この歩行距離Lが目標距離TLに達したか否かを判定する。歩行距離Lが目標距離TL以上となった場合(ステップS70:L≧TL)には、報知出力部42は、目標達成を報知する第三の報知態様による報知出力を行う(図5:ステップS72)。歩行距離Lが目標距離TL未満の場合(ステップS70:L<TL)には、報知出力部42で報知出力せずに次のステップS80に到る。
【0077】
結果出力ステップS80では、速度vを表示出力部40および速度履歴表示部82に表示し、目標距離TLと歩行距離Lとの差分である残距離LRを距離表示部80に表示する(図2を参照)。
【0078】
速度算出装置100は、再び加速度入力ステップS20に戻り、対象者の歩行または走行が継続するかぎり、合成積算値Accおよび速度vの算出を継続する。
【0079】
以上により、速度算出装置100を用いて本方法が実現される。速度算出装置100は、上述の機能がコンピュータプログラムにより付与されたデータ処理装置である。
【0080】
かかるコンピュータプログラムは、歩行または走行する対象者の加速度を計測する加速度センサ10を備える速度算出装置100に速度算出処理を実行させるためのコンピュータプログラムである。この速度算出処理は、加速度センサ10が計測した加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に合成積算値を適用して対象者の速度を算出する速度演算処理と、を含む。
【0081】
ここで、対象者に装着した加速度センサで計測した合成加速度を単純に積分して速度を算出した場合には、誤差がきわめて大きいものとなる。なぜならば、歩行または走行する人間の運動は、進行方向のみならず重力上下方向に大きな加速度をもつからである。このため、三軸方向の合成加速度を単純に積分すると、重力上下方向の加速度成分が積分値に算入されて、進行方向の速度が過大評価される。その一方で、三軸合成前の加速度センサの個々の計測値から、進行方向の加速度のみを抽出することは困難である。これに対し、本方法のように、直交三軸方向の合成加速度を、歩行または走行動作の1周期よりも十分に長い時間に亘って積算した合成積算値の累乗根を確率変数とすることで、予め求められた近似式に合成積算値を適用するだけの低負荷の演算で、実用的な精度で対象者の速度を算出することが可能である。
【0082】
なお本実施形態については種々の変形を許容する。
【0083】
たとえば、制御部50は、対象者の歩幅を算出し、オーバーペースまたはアンダーペースである場合の歩幅を対象者に報知してもよい。具体的には、制御部50は、ピッチ算出部24から取得した歩数PDと、算出した速度vと、に基づいて対象者の歩幅を算出する。そして、通常ペースの場合(ステップS50:TH3≧VD≧TH4)の歩幅を結果記憶部72に記録し、その平均値(通常平均歩幅AST)を算出する。
【0084】
対象者の歩行または走行がオーバーペースまたはアンダーペースである場合には(ステップS50:VD>TH3またはVD<TH4)、歩幅を通常平均歩幅ASTで除した比率(ストライド比率)を算出する。そして、ステップS52の第一報知出力、またはステップS54の第二報知出力において、結果記憶部72はこのストライド比率が1より大きいか、また1未満であることを報知する。これにより、歩行または走行中の対象者は、オーバーペース(またはアンダーペース)の理由が、ストライド過剰(または過小)にあるか、またはピッチ過剰(または過小)にあるか、をリアルタイムに把握することができる。このため、対象者は理想的なストライドおよびピッチで歩行または走行を継続することができる。
【0085】
上記実施形態では単位時間UTを固定値としている。これに代えて、ピッチ算出部24が算出した歩行周期Cに応じて、単位時間UTがその定数倍(たとえば50倍)となるよう可変に設定してもよい。これにより、歩行(走行)速度によらず適切な合成積算値Accが自動的に算出される。この場合、単位時間UTの長短に応じて、近似式(1)〜(3)における係数αを予め異なる値に調整しておく。合成積算値Accは単位時間UTに略比例して大きくなるためである。このため、近似式(1)〜(3)の第1項が単位時間UTの設定によらず同等の値となるように係数αを設定するとよい。たとえば、ある基準条件に比べて単位時間UTを2倍に設定した場合には、係数αを1/√2倍にすることで、近似式(1)、(2)の第1項は同等の値となる。近似式(3)の場合は、αを1/2倍にするとよい。
【0086】
すなわち、単位時間UTを可変に設定した場合、近似式(1)、(2)の場合はその累乗根の逆数を、近似式(3)の場合は逆数を、係数αに乗じるとよい。これにより、速度vの算出結果が統計的な妥当性を失わない。
【0087】
以下、実施例を用いて本発明をより具体的に説明する。ただし、本発明は以下の実施例に限定されるものではない。
【0088】
(実施例1)
毎時3kmから毎時11kmまでの速度(実測速度)で歩行または走行する被験者に装着した加速度センサの計測値から合成積算値Accを算出した。単位時間UTは60秒とした。そして、この合成積算値Accおよび被験者の身長H[m]に基づいて、下記の近似式(1)に従って速度v(予測速度)を算出した。
【0089】
【数4】
【0090】
被験者に対して上記の速度範囲のうちの複数を指定して、それぞれについて個別に、実測速度と合成積算値Accを算出した。被験者が歩幅またはピッチのいずれを変化させて歩行(走行)速度を変化させるかは被験者の任意とした。したがって、歩行(走行)速度を上げるときに歩幅を長くする被験者と、歩幅を変えずにピッチを上げる被験者と、歩幅とピッチの両方を上げる被験者と、が混在している。
【0091】
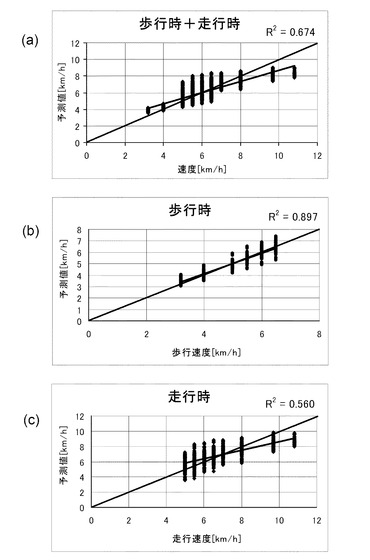
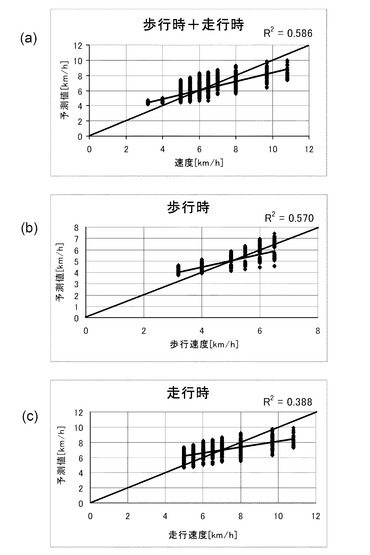
(実施例1−1)図6(a)は、被験者および速度が異なる延べ1801ケースについて、横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
(実施例1−2)図6(b)は、被験者が歩行する828ケースについて、同様に横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
(実施例1−3)図6(c)は、被験者が走行する973ケースについて、同様に横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
【0092】
実施例1−1から1−3について、ピアソン積率相関係数と自由度修正済決定係数を算出した。また、合成積算値Acc×身長Hの二乗根を説明変数とする単回帰分析により上記の近似式(1)の係数αおよびγを算出した。係数γは切片である。
【0093】
歩行時および走行時の全データに関する実施例1−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例1−2の結果を下記の(表2)に示す。走行する被験者に関する実施例1−3の結果を下記の(表3)に示す。表1〜表3では、ピアソン積率相関係数と自由度修正済決定係数を2桁の有効数字で示している。
【0094】
(実施例2)
単位時間あたりの歩数PDをカウントし、下記の近似式(2)に従って速度v(予測速度)を算出した。
【0095】
【数5】
【0096】
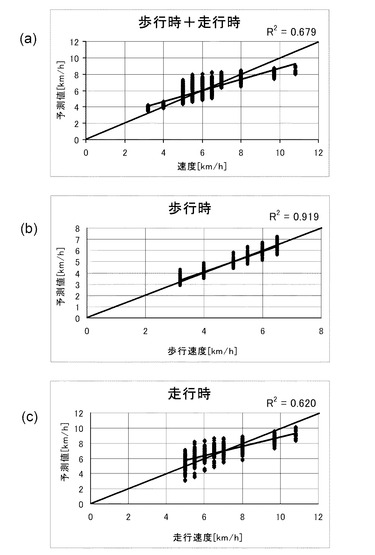
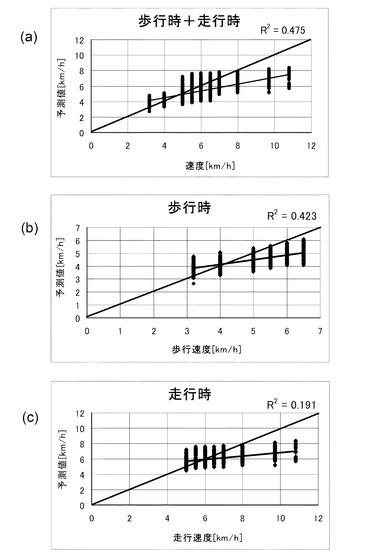
(実施例2−1)図7(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(実施例2−2)図7(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(実施例2−3)図7(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0097】
実施例1と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。合成積算値Acc×身長Hの二乗根と歩数PDを説明変数とする重回帰分析により上記の近似式(2)の係数α、β、γを算出した。係数γは切片である。係数αと係数βの|t値|を算出した。|t値|が大きい項が支配項である。
【0098】
歩行時および走行時の全データに関する実施例2−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例2−2の結果を下記の(表2)に示す。走行する被験者に関する実施例2−3の結果を下記の(表3)に示す。
【0099】
実施例2−1〜2−3のいずれも、第1項(係数α)の|t値|が第2項(係数β)の|t値|よりも大きかった。したがって、合成積算値Accの累乗根を含む第1項が支配項であることが分かった。
【0100】
(実施例3)
被験者の体重Wtと合成積算値Accとに基づく下記の近似式(3)に従って速度v(予測速度)を算出した。
【0101】
【数6】
【0102】
(実施例3−1)図8(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(実施例3−2)図8(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(実施例3−3)図8(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0103】
実施例1、2と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。合成積算値Acc/体重Wtを説明変数とする単回帰分析により上記の近似式(3)の係数αおよびγを算出した。係数γは切片である。
【0104】
歩行時および走行時の全データに関する実施例3−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例3−2の結果を下記の(表2)に示す。走行する被験者に関する実施例3−3の結果を下記の(表3)に示す。
【0105】
(比較例1)
合成積算値Accを用いず、被験者ごとに固定された歩幅に単位時間あたりの歩数PDを乗じて速度v(予測速度)を算出した。これは、特許文献1の装置による算出方法に対応している。特許文献1では被験者によらず歩幅を固定(たとえば60cm)しているが、比較例1では特許文献1よりも算出精度を高めるため、被験者の身長に応じて歩幅が変化することを摸擬した。具体的には、被験者の身長H−1.0[m]を歩幅とした。
【0106】
【数7】
【0107】
(比較例1−1)図9(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(比較例1−2)図9(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(比較例1−3)図9(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0108】
実施例1〜3と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。
【0109】
歩行時および走行時の全データに関する比較例1−1の結果を下記の(表1)に示す。歩行する被験者に関する比較例1−2の結果を下記の(表2)に示す。走行する被験者に関する比較例1−3の結果を下記の(表3)に示す。
【0110】
【表1】
【0111】
実施例1〜3および比較例1の結果を対比することにより、以下のことが明らかとなった。
【0112】
(a)合成積算値Accを説明変数とする回帰分析により実測速度を精度よく摸擬する回帰式が求められた。歩行時と走行時とを合わせた全ケースについてみると、比較例1のピアソン積率相関係数(R2)が0.48であったのに対して、実施例1〜3はいずれも同係数(R2)が0.5を超えた。比較例1ではピアソン積率相関係数(R2)の二乗根である相関係数(R)が0.7未満であったのに対して、実施例1から3では、いずれも相関係数(R)が0.7を超えた。このため、実施例1〜3は実測速度と予測速度とが高い相関をもつことが分かった。このことから、歩行(走行)速度の変化と歩幅の変化との関係が被験者ごとに異なる場合であっても、合成積算値Accを速度vに換算することにより、高い精度で実測速度が摸擬されることが分かった。
【0113】
(b)特に、合成積算値Accの累乗根を支配項に含む近似式(1)および近似式(2)によって、歩行速度および走行速度が更に精度よく算出できた。実施例1および2ではピアソン積率相関係数(R2)が0.64を超えた。このことから、相関係数(R)が0.8を超えており、実測速度と予測速度とが極めて高い相関をもつことが分かった。
【0114】
(c)更に、被験者が歩行している場合に関しては、(表2)に示すように実施例1および実施例2ともピアソン積率相関係数(R2)が0.90またはそれ以上の値となった。歩行動作は、加速度センサ10の出力値に含まれる重力上下方向の成分が小さいため、合成積算値Accと歩行速度とが高い相関をもつためと考えられる。このことから、被験者が歩行している場合と走行している場合とで、支配項の係数αを相違させることが好ましいことが分かった。
【0115】
(d)実施例1〜3、比較例1とも、自由度修正済決定係数とピアソン積率相関係数とが同等の値となった。したがって、実施例1〜3の試験ケース数は十分に大きく、本発明の有効性が統計的に実証されたといえる。
【0116】
上記実施形態および実施例は、以下の技術思想を包含するものである。
(1)歩行または走行する対象者の直交三軸方向の加速度を計測し、前記加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
(2)前記近似式の支配項が前記合成積算値の累乗根に比例する上記(1)に記載の速度算出方法。
(3)前記支配項において前記合成積算値の二乗根と前記対象者の身長の二乗根とを乗じることを含む上記(2)に記載の速度算出方法。
(4)前記近似式が、前記支配項である第1項と、歩数に比例する第2項と、を含む上記(3)に記載の速度算出方法。
(5)前記合成加速度が所定のカウント閾値に達したことを検知することに基づいて前記歩数を算出する上記(4)に記載の速度算出方法。
(6)前記合成積算値が所定の閾値未満である場合に前記支配項に乗じる第一係数と、前記合成積算値が所定の閾値以上である場合に前記支配項に乗じる第二係数と、を相違させるとともに、前記第二係数が前記第一係数よりも大きいことを特徴とする上記(2)から(5)のいずれかに記載の速度算出方法。
(7)予め設定された目標速度と、算出された前記速度と、の差分値が所定の乖離閾値を超えた場合に報知出力を行う上記(1)から(6)のいずれかに記載の速度算出方法。
(8)歩行または走行する対象者の直交三軸方向の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える速度算出装置。
(9)歩行または走行する対象者の直交三軸方向の加速度を計測する加速度センサを備える速度算出装置に用いられるコンピュータプログラムであって、前記加速度センサが計測した前記加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を前記速度算出装置に実行させるためのコンピュータプログラム。
【0117】
また、上記実施形態および実施例は、以下の技術思想を包含する。
(i)歩行または走行する対象者の加速度を計測し、前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
(ii)重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める上記(i)に記載の速度算出方法。
(iii)歩行または走行する対象者の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を、歩行または走行の周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式を記憶しておく記憶手段と、前記記憶手段を参照し、前記近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える速度算出装置。
(iv)前記加速度センサが、重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、前記積算手段が、前記加速度センサが計測した前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める上記(iii)に記載の速度算出装置。
(v)歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、前記速度算出処理が、前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を含むコンピュータプログラム。
【符号の説明】
【0118】
10:加速度センサ、12:A/D変換部、14:加速度合成部、20:Acc積算部、22:歩行判定部、24:ピッチ算出部、30:条件入力部、32:ダイヤル、34:ボタン、40:表示出力部、42:報知出力部、44:データ出力部、50:制御部、70:係数記憶部、72:結果記憶部、80:距離表示部、82:速度履歴表示部、84:目標速度表示部、100:速度算出装置、α,β,γ:係数、AX,AY,AZ:加速度、Acc:合成積算値、Axyz:合成加速度、C:歩行周期、H:身長、PD:歩数、UT:単位時間、Wt:体重、v:速度
【技術分野】
【0001】
本発明は、対象者の歩行速度または走行速度を算出する速度算出方法、速度算出装置、および速度算出装置のためのコンピュータプログラムに関する。
【背景技術】
【0002】
ウォーキングやジョギングをする人にとって、その歩行速度や走行速度をリアルタイムで知ることが重要である。
【0003】
移動する対象者の速度を計測するための複数通りの手段がこれまで提案されている。人工衛星から送られてくる信号を利用したGPS(Global Positioning System)速度計や、加速度センサの計測結果から速度を算出する速度計が知られている。GPS速度計は、人工衛星との通信機能を必要とするため装置構成が簡易ではない。GPS速度計は測位精度が高くないため、ウォーキングやジョギング程度の低速で移動する人間の速度を実用的な精度で測定することは困難である。
【0004】
加速度センサを用いる速度計を測定原理に基づいて大別すると、歩数のカウント値から速度を算出するもの(特許文献1)と、加速度波形の周波数解析から求めた歩行周期に基づいて速度を算出するもの(特許文献2)とが知られている。
【0005】
特許文献1の装置は、予め設定しておいた歩幅の長さを歩数のカウント値に乗じて歩行距離を推定し、これを計測時間で割って速度を求める。特許文献2の装置は、計測された加速度波形を周波数解析してパワースペクトルを求め、そのピーク値から統計的に歩幅を算出する。この装置は、パワースペクトルのピーク値をとる周波数から歩行周期を算出して、両者の積により歩行速度を算出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−164571号公報
【特許文献2】特開2004−358229号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の装置は、対象者の歩幅を予め一定値(たとえば60cmなど)に設定しておく必要があることから、速度の演算精度が低いという問題がある。歩行速度と歩幅との関係は対象者によって様々なためである。すなわち、対象者の中には、速く歩こうとするときに、歩行周期(ピッチ)を変えずに歩幅を広げるタイプの人達と、歩行周期を増やす人達とが存在する。特許文献1の装置ではこの歩幅の変化が無視されてしまうため、歩行速度の変化が算出されない。このため、歩行周期(ピッチ)を変えずに歩行速度を変化させるタイプの人達が対象者である場合には、特許文献1の装置では実用的な精度で歩行速度を算出することは困難である。特許文献1の装置による測定誤差が大きいことは後述する比較例にて説明する。
【0008】
特許文献2の装置では、加速度波形を周波数解析する必要があるため演算負荷が大きく、歩行速度をリアルタイムで知ることは困難である。特許文献2の装置は、運動する対象者の加速度を記録しておき、運動後にコンピュータを用いて周波数解析するものである。特許文献2の装置を用いて歩行速度をリアルタイムで知るためには、十分な能力の演算処理装置(CPU)と消費電力を要することとなり簡便ではない。
【0009】
これらの課題は、対象者が歩行している場合も走行している場合も共通に発生する。本発明は上述のような課題に鑑みてなされたものであり、簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置を提供するものである。
【課題を解決するための手段】
【0010】
本発明の速度算出方法は、歩行または走行する対象者の加速度を計測し、前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする。
【0011】
本発明の速度算出装置は、歩行または走行する対象者の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式を記憶しておく記憶手段と、前記記憶手段を参照し、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える。
【0012】
本発明のコンピュータプログラムは、歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、前記速度算出処理が、前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を含むコンピュータプログラムである。
【発明の効果】
【0013】
本発明によれば、簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置が提供される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態にかかる速度算出装置を示す機能ブロック図である。
【図2】速度算出装置の正面図である。
【図3】合成加速度の波形および合成積算値を表す模式図である。
【図4】実施形態にかかる速度算出方法の全工程を示すフローチャートである。
【図5】速度算出ステップの詳細工程を示すフローチャートである。
【図6】(a)〜(c)は実施例1−1から1−3の結果を示すグラフである。
【図7】(a)〜(c)は実施例2−1から2−3の結果を示すグラフである。
【図8】(a)〜(c)は実施例3−1から3−3の結果を示すグラフである。
【図9】(a)〜(c)は比較例1−1から1−3の結果を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態を図面に基づいて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。
【0016】
以下の実施形態を通じて本発明の速度算出方法を説明するにあたり、複数の工程を順番に記載する場合があるが、その記載の順番は必ずしも各工程を実行する順番やタイミングを限定するものではない。本発明の速度算出方法を実施するときには、その複数の工程の順番は、技術的に支障のない範囲で変更することができ、また複数の工程の実行タイミングの一部または全部が互いに重複していてもよい。
【0017】
本発明の速度算出装置を実現するための各種の構成要素は、それらの機能を実現するものであるかぎり、具体的なハードウェア構成は特に限定されない。たとえば、所定の機能を発揮する専用のハードウェア、所定の機能がコンピュータプログラムにより付与されたデータ処理装置、コンピュータプログラムによりデータ処理装置に実現された所定の機能、これらの任意の組み合わせ、等により本発明の各種の構成要素を実現することができる。より具体的には、コンピュータプログラムを読み取って対応する処理動作を実行できるように、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/F(Interface)ユニット、等の汎用デバイスで構築されたハードウェア、所定の処理動作を実行するように構築された専用の論理回路、これらの組み合わせ、等を用いて本発明を実施することができる。
【0018】
特に、本発明を構成する速度の近似式は、記憶装置に記憶された係数、入力値と出力値とが当該近似式を満たすテーブル、当該近似式に対応する専用の論理回路、などによって実現することができる。
【0019】
(速度算出装置)
図1は、本発明の実施形態にかかる速度算出装置100を示す機能ブロック図である。図2は本実施形態の速度算出装置100の正面図である。
【0020】
はじめに、本実施形態の概要について説明する。速度算出装置100は、加速度センサ10、Acc積算部20および制御部50を備えている。
【0021】
加速度センサ10は、歩行または走行する対象者の加速度を計測する手段である。加速度センサ10は、一軸、直交二軸または直交三軸の加速度を計測する。
【0022】
加速度センサ10が一軸センサである場合、計測方向が重力方向、すなわち対象者の上下方向に一致するようにして加速度センサ10を対象者に装着する。加速度センサ10の二つの計測方向が直交する直交二軸センサである場合は、一方の計測方向を重力方向に一致させて加速度センサ10を対象者に装着する。そして他方の計測方向を、対象者の歩行(走行)方向の前後または左右方向に一致させるとよい。歩行や走行においては、主に上下方向の振動に起因する加速度が検出されるため、上下方向を計測方向とするとよい。
【0023】
加速度センサ10の三つの計測方向が互いに直交する直交三軸センサである場合は、対象者に対して加速度センサ10を任意の向きに装着することができる。以下、加速度センサ10が、対象者の直交三軸方向の加速度を計測する場合を例に説明する。
【0024】
Acc積算部20は、加速度センサ10が計測した加速度を合成した合成加速度Axyzを、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める積算手段である。制御部50は、予め求められた近似式に合成積算値Accを適用して対象者の速度vを算出する速度演算手段である。なお、加速度センサ10が一軸センサである場合、合成積算値Accは、加速度センサ10が計測した加速度を単位時間UTに亘って積算して合成積算値Accを求める。
【0025】
次に、本実施形態について詳細に説明する。ただし、以下に説明する合成加速度Axyzの合成方法、合成積算値Accの算出方法、歩行判定部22による歩行の判定方法などの各種の演算方法は例示であり、本発明はこれらに限定されるものではない。
【0026】
速度算出装置100は可搬性をもち、対象者(ユーザ)の体もしくは衣服に装着するか、または対象者が鞄に入れて持ち運ぶことが可能である。速度算出装置100は、歩行または走行する対象者の進行方向の移動速度(歩行速度または走行速度)を近似演算により算出する。以下、歩行と走行とを区別せずに歩行と表現する場合がある。
【0027】
本実施形態の速度算出装置100は、算出した速度vを表示出力部40で表示出力する。速度vを示す速度データは結果記憶部72に記録されている。速度データは、データ出力部44からコンピュータ装置(図示せず)によって読み出される。
【0028】
本実施形態に代えて、算出した速度vを用いて他の物理量(たとえば、歩行距離)を演算し、当該他の物理量を表示出力部40で表示出力してもよい。言い換えると、本実施形態の速度算出装置100は、対象者の速度vを算出して出力するか、または他の物理量を演算する過程において対象者の速度vを算出する。
【0029】
本実施形態では、算出された速度vの数値を表示出力部40で表示出力する。速度vの履歴を速度履歴表示部82で表示出力する。速度履歴表示部82は、算出された速度vを経時的にグラフ化して表示する表示手段である。
【0030】
本実施形態の制御部50は、速度vを積分して歩行(走行)距離を算出する。図2に示す距離表示部80は、この歩行(走行)距離、または残り距離を表示する。残り距離は、予め設定した目標距離TLから歩行(走行)距離を減じた値である。
【0031】
条件入力部30は、対象者が各種の条件を入力するためのインタフェースである。条件入力部30はダイヤル32やボタン34(図2を参照)により構成される。
【0032】
報知出力部42は、予め設定された目標速度TVと算出された速度vとの差分値VDが所定の乖離閾値を超えた場合に報知出力を行う手段である。報知出力の態様は特に限定されず、音声、シグナルまたはパルスが例示される。報知出力部42としては、スピーカー、シグナル発信機またはパルス加振器が例示される。算出された速度vと目標速度TVとの差分値が所定以上となったことを報知出力部42で報知することにより、対象者は目標のペースを維持することができる。目標速度表示部84は、予め設定した目標速度TVをグラフ表示する表示手段である。
【0033】
加速度センサ10は、互いに直交するX軸方向加速度AX、Y軸方向加速度AY、Z軸方向加速度AZを、それぞれアナログまたはデジタルデータとして取得する。対象者の天頂方向や歩行方向と、加速度センサ10の任意の軸とを一致させる必要はない。対象者は速度算出装置100を任意の向きで装着または保持して歩行すればよい。
【0034】
A/D変換部12は、加速度センサ10の各軸の出力波形を所定の時間間隔でサンプリングして、加速度データ(デジタルデータ)を取得する。加速度合成部14は、A/D変換部12で取得した直交三軸方向の加速度データを合成して、合成加速度Axyzを算出する。合成加速度Axyzは、AX、AY、AZの二乗和平方根である。
【0035】
Acc積算部20は、合成加速度Axyzを所定の単位時間UTに亘って積算することにより合成積算値Accを算出する。
【0036】
図3は、合成加速度Axyzの波形および合成積算値Accを表す模式図である。横軸は時刻T、縦軸は加速度である。加速度センサ10からの入力が非ゼロの場合、合成加速度Axyzは正の値をとる。合成積算値Accは、単位時間UTに亘って合成加速度Axyzを積算した値であり、言い換えると合成加速度Axyzの曲線下面積に相当する。
【0037】
加速度合成部14は、アナログまたはデジタルのローパスフィルタを備えている。人間の走行ピッチの上限は240歩/分=4歩/秒=4Hz程度である。これよりも十分に高い周波数の加速度ノイズを加速度合成部14は合成加速度Axyzから除去する。これにより、Acc積算部20で算出される合成積算値Accの再現性が向上する。
【0038】
単位時間UTは、対象者の歩行周期Cよりも十分に長い。具体的には、単位時間UTは、歩行周期Cの10倍以上、好ましくは50倍以上に設定されている。単位時間UTが歩行周期Cよりも十分に長いことにより、測定因子に基づく合成積算値Accの算出誤差が低減される。測定因子としては、単位時間UTの開始時刻の選定、加速度センサ10の計測ノイズ、対象者の歩行の乱れ、などが挙げられる。
【0039】
単位時間UTが過大であると歩行開始から速度算出までに長時間を要する。単位時間UTが過大であると、対象者の歩行速度が急激に変化した場合でも合成積算値Accの変化が緩和されるため、速度の算出結果が鈍ることとなる。本実施形態の速度算出装置100では、単位時間UTが60秒に設定されている。人間の一般的な歩行周期Cが1歩/秒(ゆっくりとした歩行時)から4歩/秒(高速走行時)であることから、本実施形態の単位時間UTは歩行周期Cの15倍から60倍に設定されていることとなる。
【0040】
図1に戻り、制御部50はCPUを含む情報処理手段である。制御部50は、係数記憶部70を参照して、予め求められた下記の近似式(1)または(2)を取得する。制御部50は、取得した近似式(1)または(2)に合成積算値Accを適用して、対象者の速度vを算出する。近似式(1)、(2)がいずれも速度v(歩行速度および走行速度)と高い相関を有していることは、後述する実施例にて説明する。
【0041】
【数1】
【0042】
【数2】
【0043】
近似式(2)の第1項は、切片(γ)を除く他の項(第2項)よりも大きな値となる支配項である。近似式(2)の支配項(第1項)は、合成積算値Accの累乗根に比例する項である。累乗根は、底(合成積算値Acc)の1/N乗(ただし、N>1)で表される。
【0044】
近似式(2)は、支配項である第1項と、歩数PDに比例する第2項と、を含む。歩数PDは単位時間UTあたりの歩数値である。
【0045】
近似式(1)、(2)の末項(切片)は定数項γである。
【0046】
近似式における支配項は、複数の説明変数をもつ場合、すなわち切片以外の項が複数存在する場合に、説明変数のt値の絶対値(|t値|)が最大となる項である。本実施形態では近似式(2)がこれに該当する。本発明においては、1つの説明変数からなる近似式の場合、すなわち切片以外の項が1つの場合に、当該説明変数の項を支配項という。本実施形態では近似式(1)および後述する近似式(3)がこれにあたる。
【0047】
より具体的には、近似式(2)の支配項(第1項)は、合成積算値Accと対象者の身長Hとの積の累乗根である。言い換えると、近似式(2)の演算は、合成積算値Accの二乗根(N=2)と、対象者の身長Hの二乗根と、を乗じることを含む。すなわち、近似式(2)の支配項は、合成積算値Accの二乗根と、対象者の身長Hの二乗根との積に比例する。身長Hの単位系はセンチメートルでもメートルでもインチでもよい。これらの単位系の相違は、第1項の係数αの設定により調整される。
【0048】
速度算出装置100の歩行判定部22は、合成加速度Axyzに基づいて歩行または走行の発生を判定する。歩行判定部22は、合成加速度Axyzの極大値に基づいて歩行と走行とを識別する。ピッチ算出部24は、所定時間(たとえば単位時間UT)ごとの歩数PDを計数して、その値を制御部50に送る。
【0049】
係数記憶部70は近似式(1)、(2)を記憶しておく手段である。本実施形態において係数記憶部70が近似式(1)、(2)を記憶するとは、係数記憶部70が、近似式(1)、(2)の係数α、β、γ、単位時間UTおよびカウント閾値THを記憶することをいう。対象者の身長Hは、条件入力部30を通じて対象者から受け付ける。
【0050】
加速度センサ10が直交三軸センサである場合の係数α、β、γと、加速度センサ10が一軸センサである場合の係数α、β、γと、直交二軸センサである場合の係数α、β、γとは、互いに相違する。係数記憶部70には、加速度センサ10の計測方向の数(本実施形態の場合は3つ)に対応する係数α、β、γが記憶されている。
【0051】
速度算出装置100においては、近似式(1)または(2)のいずれか一方に基づいて速度vを算出すればよい。近似式(1)と(2)とが選択可能であって、対象者による条件入力部30の操作入力その他の条件に応じて近似式(1)または(2)を選択し、当該式に基づいて速度vを算出してもよい。
【0052】
本実施形態においては、対象者の歩行ピッチに応じて、近似式(1)または(2)の第1項の係数αの値を相違させてもよい。実施例を用いて後述するように、歩行時の係数αよりも走行時の係数αを大きく設定することで、速度vを更に高い確度で算出することができる。歩行時の合成積算値Accは走行時の合成積算値Accよりも小さい。合成積算値Accの大小に応じて係数αを相違させてもよい。すなわち、合成積算値Accが所定の閾値未満である場合に支配項(第1項)に乗じる係数α(第一係数α1)と、合成積算値Accが所定の閾値以上である場合に支配項(第1項)に乗じる係数α(第二係数α2)と、を相違させてもよい。第二係数α2は第一係数α1よりも大きいことが好ましい。
【0053】
本実施形態に代えて、合成積算値Accの大小ではなく、歩行判定部22から制御部50に送信された判定情報に基づいて、制御部50は歩行と走行とを識別してもよい。この場合、制御部50は、歩行時の第一係数α1または走行時の第二係数α2を選択する。
【0054】
上記実施形態では合成積算値Accの累乗根を含む近似式(1)、(2)を例示した。ただし、合成積算値Accを含むかぎり、本発明で用いる近似式は上記に限られない。以下の近似式(3)のように合成積算値Accの一次関数を用いてもよい。近似式(3)において、Wtは対象者の体重である。この近似式(3)によっても速度vが実用的な精度で算出できることを実施例3として後述する。
【0055】
【数3】
【0056】
(速度算出方法)
以下、本実施形態の速度算出装置100を用いて行う速度算出方法(以下、本方法という場合がある)について説明する。図4は、本方法の全工程を示すフローチャートである。図5は、速度算出ステップS40の詳細工程を示すフローチャートである。
【0057】
はじめに、本方法の概要について説明する。
【0058】
本方法では、速度算出装置100は、歩行または走行する対象者の加速度を計測する。具体的には、対象者の直交三軸方向の加速度を計測する(図4:ステップS20=Y)。なお、重力方向を軸方向とする一軸方向の対象者の加速度を計測するか、または軸方向および当該軸方向と直交する方向からなる直交二軸方向の対象者の加速度を計測してもよい。速度算出装置100は、これらの三軸方向の加速度計測値に任意でローパスフィルタ処理を施したうえで互いに合成して合成加速度Axyzを算出する(図5:ステップS41)。速度算出装置100は、この合成加速度Axyzを、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める(図5:ステップS42)。速度算出装置100は、予め求められた近似式(1)または(2)に合成積算値Accを適用して、対象者の速度vを算出する(図5:ステップS46)。
【0059】
以下、本方法をより具体的に説明する。
【0060】
条件入力ステップS10では、条件入力部30は、速度を測定する対象者から各種の入力を受け付ける。対象者は、ダイヤル32およびボタン34などの条件入力部30(図2を参照)を操作して、身長H、体重Wt、目標速度TV、目標距離TLを入力する。
【0061】
対象者は、速度算出装置100を装着して所定の速度で歩行または走行する。加速度入力ステップS20では、速度算出装置100は、加速度センサ10またはA/D変換部12から、X,Y,Z軸方向の加速度AX,AY,AZの計測値が出力されたか否かを判定する。加速度AX,AY,AZの計測値が出力された場合には(図4:ステップS20=Y)、速度算出ステップS40に遷移する。加速度AX,AY,AZの計測値が出力されない場合、対象者が静止しているものと推定して速度算出装置100は休止モードとなる(図4:ステップS30)。休止モードが所定時間に亘って継続した場合は、速度算出装置100は電源をオフにするなどして一連の処理を終了する。
【0062】
速度算出ステップS40では、加速度合成部14は、図5に示すように、直交三軸方向の加速度データを合成して合成加速度Axyzを生成する(図5:ステップS41)。加速度合成部14は、ローパスフィルタを用いて合成加速度Axyzから高周波ノイズを除去する。
【0063】
つぎに、Acc積算部20は、合成加速度Axyzを所定の単位時間UTに亘って積算して合成積算値Accを算出する(図5:ステップS42)。Acc積算部20は係数記憶部70を参照して単位時間UTを取得し、所定のサンプリング周期で合成加速度Axyzをデジタル化し、これを積算していく。Acc積算部20は、対象者が歩行または走行している間、合成加速度Axyzのサンプリングを継続する。任意の時刻における合成積算値Accは、単位時間UTだけ遡った過去時点から当該時刻までにサンプリングされた合成加速度Axyzの積算値である。Acc積算部20は、合成積算値Accを時々刻々更新していく。
【0064】
歩行判定部22は、加速度合成部14が合成した合成加速度Axyzが所定のカウント閾値TH(図3を参照)に達したことを検知する。ピッチ算出部24は、歩行判定部22の検知結果に基づいて歩数を算出する。
【0065】
より具体的には、歩行判定部22は、第一条件と第二条件とが同時に満足した場合に、歩行または走行が発生したものと推定して(図5:ステップS43=Y)、歩数PDをインクリメントする。第一条件は、合成加速度Axyzの値がカウント閾値TH未満からカウント閾値TH以上に遷移するという条件である。第二条件は、前回の当該遷移からの経過時間が所定範囲(たとえば、0.25秒以上1秒以下)であるという条件である。歩行または走行が検出されなかった場合には(図5:ステップS43=N)、加速度合成部14は加速度センサ10からの加速度AX,AY,AZを再度取得して、これらを合成する(図5:ステップS41)。
【0066】
ピッチ算出部24は、所定時間(たとえば単位時間UT)ごとの歩数PDを計数して(図5:ステップS44)、その値を制御部50に送る。歩行判定部22は、合成加速度Axyzの極大値に基づいて歩行と走行とを識別する。具体的には、合成加速度Axyzの極大値が所定の加速度閾値よりも大きい場合には、歩行判定部22はその動作を走行と判定する。歩行判定部22による歩行・走行の判定結果を示す判定情報は制御部50に送信される。
【0067】
なお、ステップS42と、ステップS43〜S44とは、いずれを先に実行してもよく、またはこれらを互いに重複するタイミングで実行してもよい。
【0068】
制御部50は、近似式の係数α、β、γのうち必要なものを係数記憶部70から取得する(図5:ステップS45)。実施例で後述するように、歩行時と走行時とで異なる係数αを用いることで速度vの算出精度が向上する。制御部50は、歩行判定部22およびピッチ算出部24から送信された結果に基づいて係数α、β、γを取得するとよい。
【0069】
制御部50は、取得した係数α、β、γ、身長H、体重Wtのいずれかで構成される近似式と、合成積算値Accおよび歩数PDに基づいて速度vを算出する(図5:ステップS46)。
【0070】
具体的には、制御部50は、係数記憶部70を参照して取得した係数αおよびγ、Acc積算部20から取得した合成積算値Acc、ならびに対象者から受け付けた身長Hに基づいて、近似式(1)に従って速度vを算出する。
【0071】
制御部50は、係数記憶部70を参照して取得した係数α、βおよびγ、Acc積算部20から取得した合成積算値Acc、対象者から受け付けた身長H、ならびにピッチ算出部24から取得した歩数PDに基づいて、近似式(2)に従って速度vを算出してもよい。制御部50は、係数記憶部70を参照して取得した係数αおよびγ、Acc積算部20から取得した合成積算値Acc、ならびに対象者から取得した体重Wtに基づいて、近似式(3)に従って速度vを算出してもよい。
【0072】
以上で速度算出ステップS40を終了する。
【0073】
対象者の速度vが算出されると、制御部50は、その値を目標速度TVと対比する。本方法では、制御部50は、速度v−目標速度TVで定義される差分値VDと、正の乖離閾値TH3および負の乖離閾値TH4と、の大小判定を行う(図4:ステップS50)。
【0074】
差分値VDがTH4以上かつTH3以下であった場合には(ステップS50:TH3≧VD≧TH4)、対象者がほぼ目標速度TVを維持している通常ペースと判断して報知は行わずに次のステップS60に到る。差分値VDがTH3を超えていた場合には(ステップS50:VD>TH3)、対象者が目標速度TVを超過しているオーバーペースと判断して、報知出力部42は第一の報知態様による報知出力を行う(図5:ステップS52)。差分値VDがTH4よりも小さい場合には(ステップS50:VD<TH4)、対象者が目標速度TVよりも遅いアンダーペースと判断して、報知出力部42は第二の報知態様による報知出力を行う(図5:ステップS54)。第二の報知態様は、第一の報知態様よりもアップテンポのシグナルなど、対象者のペースアップを促す出力が好ましい。
【0075】
距離積算ステップS60では、制御部50は、速度vを積算(積分)することで歩行(走行)距離Lを算出する。
【0076】
距離判定ステップS70では、この歩行距離Lが目標距離TLに達したか否かを判定する。歩行距離Lが目標距離TL以上となった場合(ステップS70:L≧TL)には、報知出力部42は、目標達成を報知する第三の報知態様による報知出力を行う(図5:ステップS72)。歩行距離Lが目標距離TL未満の場合(ステップS70:L<TL)には、報知出力部42で報知出力せずに次のステップS80に到る。
【0077】
結果出力ステップS80では、速度vを表示出力部40および速度履歴表示部82に表示し、目標距離TLと歩行距離Lとの差分である残距離LRを距離表示部80に表示する(図2を参照)。
【0078】
速度算出装置100は、再び加速度入力ステップS20に戻り、対象者の歩行または走行が継続するかぎり、合成積算値Accおよび速度vの算出を継続する。
【0079】
以上により、速度算出装置100を用いて本方法が実現される。速度算出装置100は、上述の機能がコンピュータプログラムにより付与されたデータ処理装置である。
【0080】
かかるコンピュータプログラムは、歩行または走行する対象者の加速度を計測する加速度センサ10を備える速度算出装置100に速度算出処理を実行させるためのコンピュータプログラムである。この速度算出処理は、加速度センサ10が計測した加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に合成積算値を適用して対象者の速度を算出する速度演算処理と、を含む。
【0081】
ここで、対象者に装着した加速度センサで計測した合成加速度を単純に積分して速度を算出した場合には、誤差がきわめて大きいものとなる。なぜならば、歩行または走行する人間の運動は、進行方向のみならず重力上下方向に大きな加速度をもつからである。このため、三軸方向の合成加速度を単純に積分すると、重力上下方向の加速度成分が積分値に算入されて、進行方向の速度が過大評価される。その一方で、三軸合成前の加速度センサの個々の計測値から、進行方向の加速度のみを抽出することは困難である。これに対し、本方法のように、直交三軸方向の合成加速度を、歩行または走行動作の1周期よりも十分に長い時間に亘って積算した合成積算値の累乗根を確率変数とすることで、予め求められた近似式に合成積算値を適用するだけの低負荷の演算で、実用的な精度で対象者の速度を算出することが可能である。
【0082】
なお本実施形態については種々の変形を許容する。
【0083】
たとえば、制御部50は、対象者の歩幅を算出し、オーバーペースまたはアンダーペースである場合の歩幅を対象者に報知してもよい。具体的には、制御部50は、ピッチ算出部24から取得した歩数PDと、算出した速度vと、に基づいて対象者の歩幅を算出する。そして、通常ペースの場合(ステップS50:TH3≧VD≧TH4)の歩幅を結果記憶部72に記録し、その平均値(通常平均歩幅AST)を算出する。
【0084】
対象者の歩行または走行がオーバーペースまたはアンダーペースである場合には(ステップS50:VD>TH3またはVD<TH4)、歩幅を通常平均歩幅ASTで除した比率(ストライド比率)を算出する。そして、ステップS52の第一報知出力、またはステップS54の第二報知出力において、結果記憶部72はこのストライド比率が1より大きいか、また1未満であることを報知する。これにより、歩行または走行中の対象者は、オーバーペース(またはアンダーペース)の理由が、ストライド過剰(または過小)にあるか、またはピッチ過剰(または過小)にあるか、をリアルタイムに把握することができる。このため、対象者は理想的なストライドおよびピッチで歩行または走行を継続することができる。
【0085】
上記実施形態では単位時間UTを固定値としている。これに代えて、ピッチ算出部24が算出した歩行周期Cに応じて、単位時間UTがその定数倍(たとえば50倍)となるよう可変に設定してもよい。これにより、歩行(走行)速度によらず適切な合成積算値Accが自動的に算出される。この場合、単位時間UTの長短に応じて、近似式(1)〜(3)における係数αを予め異なる値に調整しておく。合成積算値Accは単位時間UTに略比例して大きくなるためである。このため、近似式(1)〜(3)の第1項が単位時間UTの設定によらず同等の値となるように係数αを設定するとよい。たとえば、ある基準条件に比べて単位時間UTを2倍に設定した場合には、係数αを1/√2倍にすることで、近似式(1)、(2)の第1項は同等の値となる。近似式(3)の場合は、αを1/2倍にするとよい。
【0086】
すなわち、単位時間UTを可変に設定した場合、近似式(1)、(2)の場合はその累乗根の逆数を、近似式(3)の場合は逆数を、係数αに乗じるとよい。これにより、速度vの算出結果が統計的な妥当性を失わない。
【0087】
以下、実施例を用いて本発明をより具体的に説明する。ただし、本発明は以下の実施例に限定されるものではない。
【0088】
(実施例1)
毎時3kmから毎時11kmまでの速度(実測速度)で歩行または走行する被験者に装着した加速度センサの計測値から合成積算値Accを算出した。単位時間UTは60秒とした。そして、この合成積算値Accおよび被験者の身長H[m]に基づいて、下記の近似式(1)に従って速度v(予測速度)を算出した。
【0089】
【数4】
【0090】
被験者に対して上記の速度範囲のうちの複数を指定して、それぞれについて個別に、実測速度と合成積算値Accを算出した。被験者が歩幅またはピッチのいずれを変化させて歩行(走行)速度を変化させるかは被験者の任意とした。したがって、歩行(走行)速度を上げるときに歩幅を長くする被験者と、歩幅を変えずにピッチを上げる被験者と、歩幅とピッチの両方を上げる被験者と、が混在している。
【0091】
(実施例1−1)図6(a)は、被験者および速度が異なる延べ1801ケースについて、横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
(実施例1−2)図6(b)は、被験者が歩行する828ケースについて、同様に横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
(実施例1−3)図6(c)は、被験者が走行する973ケースについて、同様に横軸を速度(実測速度)、縦軸を算出結果(予測速度)としてプロットしたグラフである。
【0092】
実施例1−1から1−3について、ピアソン積率相関係数と自由度修正済決定係数を算出した。また、合成積算値Acc×身長Hの二乗根を説明変数とする単回帰分析により上記の近似式(1)の係数αおよびγを算出した。係数γは切片である。
【0093】
歩行時および走行時の全データに関する実施例1−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例1−2の結果を下記の(表2)に示す。走行する被験者に関する実施例1−3の結果を下記の(表3)に示す。表1〜表3では、ピアソン積率相関係数と自由度修正済決定係数を2桁の有効数字で示している。
【0094】
(実施例2)
単位時間あたりの歩数PDをカウントし、下記の近似式(2)に従って速度v(予測速度)を算出した。
【0095】
【数5】
【0096】
(実施例2−1)図7(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(実施例2−2)図7(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(実施例2−3)図7(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0097】
実施例1と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。合成積算値Acc×身長Hの二乗根と歩数PDを説明変数とする重回帰分析により上記の近似式(2)の係数α、β、γを算出した。係数γは切片である。係数αと係数βの|t値|を算出した。|t値|が大きい項が支配項である。
【0098】
歩行時および走行時の全データに関する実施例2−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例2−2の結果を下記の(表2)に示す。走行する被験者に関する実施例2−3の結果を下記の(表3)に示す。
【0099】
実施例2−1〜2−3のいずれも、第1項(係数α)の|t値|が第2項(係数β)の|t値|よりも大きかった。したがって、合成積算値Accの累乗根を含む第1項が支配項であることが分かった。
【0100】
(実施例3)
被験者の体重Wtと合成積算値Accとに基づく下記の近似式(3)に従って速度v(予測速度)を算出した。
【0101】
【数6】
【0102】
(実施例3−1)図8(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(実施例3−2)図8(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(実施例3−3)図8(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0103】
実施例1、2と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。合成積算値Acc/体重Wtを説明変数とする単回帰分析により上記の近似式(3)の係数αおよびγを算出した。係数γは切片である。
【0104】
歩行時および走行時の全データに関する実施例3−1の結果を下記の(表1)に示す。歩行する被験者に関する実施例3−2の結果を下記の(表2)に示す。走行する被験者に関する実施例3−3の結果を下記の(表3)に示す。
【0105】
(比較例1)
合成積算値Accを用いず、被験者ごとに固定された歩幅に単位時間あたりの歩数PDを乗じて速度v(予測速度)を算出した。これは、特許文献1の装置による算出方法に対応している。特許文献1では被験者によらず歩幅を固定(たとえば60cm)しているが、比較例1では特許文献1よりも算出精度を高めるため、被験者の身長に応じて歩幅が変化することを摸擬した。具体的には、被験者の身長H−1.0[m]を歩幅とした。
【0106】
【数7】
【0107】
(比較例1−1)図9(a)は、歩行時および走行時の全データ(1801ケース)に関して、実施例1−1と同様にプロットしたグラフである。
(比較例1−2)図9(b)は、歩行時のデータ(828ケース)に関して、実施例1−2と同様にプロットしたグラフである。
(比較例1−3)図9(c)は、走行時のデータ(973ケース)に関して、実施例1−3と同様にプロットしたグラフである。
【0108】
実施例1〜3と同様に、ピアソン積率相関係数と自由度修正済決定係数を算出した。
【0109】
歩行時および走行時の全データに関する比較例1−1の結果を下記の(表1)に示す。歩行する被験者に関する比較例1−2の結果を下記の(表2)に示す。走行する被験者に関する比較例1−3の結果を下記の(表3)に示す。
【0110】
【表1】
【0111】
実施例1〜3および比較例1の結果を対比することにより、以下のことが明らかとなった。
【0112】
(a)合成積算値Accを説明変数とする回帰分析により実測速度を精度よく摸擬する回帰式が求められた。歩行時と走行時とを合わせた全ケースについてみると、比較例1のピアソン積率相関係数(R2)が0.48であったのに対して、実施例1〜3はいずれも同係数(R2)が0.5を超えた。比較例1ではピアソン積率相関係数(R2)の二乗根である相関係数(R)が0.7未満であったのに対して、実施例1から3では、いずれも相関係数(R)が0.7を超えた。このため、実施例1〜3は実測速度と予測速度とが高い相関をもつことが分かった。このことから、歩行(走行)速度の変化と歩幅の変化との関係が被験者ごとに異なる場合であっても、合成積算値Accを速度vに換算することにより、高い精度で実測速度が摸擬されることが分かった。
【0113】
(b)特に、合成積算値Accの累乗根を支配項に含む近似式(1)および近似式(2)によって、歩行速度および走行速度が更に精度よく算出できた。実施例1および2ではピアソン積率相関係数(R2)が0.64を超えた。このことから、相関係数(R)が0.8を超えており、実測速度と予測速度とが極めて高い相関をもつことが分かった。
【0114】
(c)更に、被験者が歩行している場合に関しては、(表2)に示すように実施例1および実施例2ともピアソン積率相関係数(R2)が0.90またはそれ以上の値となった。歩行動作は、加速度センサ10の出力値に含まれる重力上下方向の成分が小さいため、合成積算値Accと歩行速度とが高い相関をもつためと考えられる。このことから、被験者が歩行している場合と走行している場合とで、支配項の係数αを相違させることが好ましいことが分かった。
【0115】
(d)実施例1〜3、比較例1とも、自由度修正済決定係数とピアソン積率相関係数とが同等の値となった。したがって、実施例1〜3の試験ケース数は十分に大きく、本発明の有効性が統計的に実証されたといえる。
【0116】
上記実施形態および実施例は、以下の技術思想を包含するものである。
(1)歩行または走行する対象者の直交三軸方向の加速度を計測し、前記加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
(2)前記近似式の支配項が前記合成積算値の累乗根に比例する上記(1)に記載の速度算出方法。
(3)前記支配項において前記合成積算値の二乗根と前記対象者の身長の二乗根とを乗じることを含む上記(2)に記載の速度算出方法。
(4)前記近似式が、前記支配項である第1項と、歩数に比例する第2項と、を含む上記(3)に記載の速度算出方法。
(5)前記合成加速度が所定のカウント閾値に達したことを検知することに基づいて前記歩数を算出する上記(4)に記載の速度算出方法。
(6)前記合成積算値が所定の閾値未満である場合に前記支配項に乗じる第一係数と、前記合成積算値が所定の閾値以上である場合に前記支配項に乗じる第二係数と、を相違させるとともに、前記第二係数が前記第一係数よりも大きいことを特徴とする上記(2)から(5)のいずれかに記載の速度算出方法。
(7)予め設定された目標速度と、算出された前記速度と、の差分値が所定の乖離閾値を超えた場合に報知出力を行う上記(1)から(6)のいずれかに記載の速度算出方法。
(8)歩行または走行する対象者の直交三軸方向の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える速度算出装置。
(9)歩行または走行する対象者の直交三軸方向の加速度を計測する加速度センサを備える速度算出装置に用いられるコンピュータプログラムであって、前記加速度センサが計測した前記加速度を合成した合成加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を前記速度算出装置に実行させるためのコンピュータプログラム。
【0117】
また、上記実施形態および実施例は、以下の技術思想を包含する。
(i)歩行または走行する対象者の加速度を計測し、前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
(ii)重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める上記(i)に記載の速度算出方法。
(iii)歩行または走行する対象者の加速度を計測する加速度センサと、前記加速度センサが計測した加速度を、歩行または走行の周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、予め求められた近似式を記憶しておく記憶手段と、前記記憶手段を参照し、前記近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、を備える速度算出装置。
(iv)前記加速度センサが、重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、前記積算手段が、前記加速度センサが計測した前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める上記(iii)に記載の速度算出装置。
(v)歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、前記速度算出処理が、前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、を含むコンピュータプログラム。
【符号の説明】
【0118】
10:加速度センサ、12:A/D変換部、14:加速度合成部、20:Acc積算部、22:歩行判定部、24:ピッチ算出部、30:条件入力部、32:ダイヤル、34:ボタン、40:表示出力部、42:報知出力部、44:データ出力部、50:制御部、70:係数記憶部、72:結果記憶部、80:距離表示部、82:速度履歴表示部、84:目標速度表示部、100:速度算出装置、α,β,γ:係数、AX,AY,AZ:加速度、Acc:合成積算値、Axyz:合成加速度、C:歩行周期、H:身長、PD:歩数、UT:単位時間、Wt:体重、v:速度
【特許請求の範囲】
【請求項1】
歩行または走行する対象者の加速度を計測し、
前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、
予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
【請求項2】
前記対象者の直交三軸方向の加速度を計測し、
計測された前記直交三軸方向の加速度を合成した合成加速度を前記単位時間に亘って積算して前記合成積算値を求める請求項1に記載の速度算出方法。
【請求項3】
重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、
前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める請求項1に記載の速度算出方法。
【請求項4】
前記近似式の支配項が前記合成積算値の累乗根に比例する請求項1から3のいずれか一項に記載の速度算出方法。
【請求項5】
前記支配項において前記合成積算値の二乗根と前記対象者の身長の二乗根とを乗じることを含む請求項4に記載の速度算出方法。
【請求項6】
前記近似式が、前記支配項である第1項と、歩数に比例する第2項と、を含む請求項5に記載の速度算出方法。
【請求項7】
前記合成加速度が所定のカウント閾値に達したことを検知することに基づいて前記歩数を算出する請求項6に記載の速度算出方法。
【請求項8】
前記合成積算値が所定の閾値未満である場合に前記支配項に乗じる第一係数と、前記合成積算値が所定の閾値以上である場合に前記支配項に乗じる第二係数と、を相違させるとともに、前記第二係数が前記第一係数よりも大きいことを特徴とする請求項4から7のいずれか一項に記載の速度算出方法。
【請求項9】
予め設定された目標速度と、算出された前記速度と、の差分値が所定の乖離閾値を超えた場合に報知出力を行う請求項1から8のいずれか一項に記載の速度算出方法。
【請求項10】
歩行または走行する対象者の加速度を計測する加速度センサと、
前記加速度センサが計測した加速度を、歩行または走行の周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、
予め求められた近似式を記憶しておく記憶手段と、
前記記憶手段を参照し、前記近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、
を備える速度算出装置。
【請求項11】
前記加速度センサが、前記対象者の直交三軸方向の加速度を計測し、
前記積算手段が、前記加速度センサが計測した前記直交三軸方向の加速度を合成した合成加速度を前記単位時間に亘って積算して前記合成積算値を求める請求項10に記載の速度算出装置。
【請求項12】
前記加速度センサが、重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、
前記積算手段が、前記加速度センサが計測した前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める請求項10に記載の速度算出装置。
【請求項13】
歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、
前記速度算出処理が、
前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、
予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、
を含むコンピュータプログラム。
【請求項1】
歩行または走行する対象者の加速度を計測し、
前記加速度を歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求め、
予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出することを特徴とする速度算出方法。
【請求項2】
前記対象者の直交三軸方向の加速度を計測し、
計測された前記直交三軸方向の加速度を合成した合成加速度を前記単位時間に亘って積算して前記合成積算値を求める請求項1に記載の速度算出方法。
【請求項3】
重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、
前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める請求項1に記載の速度算出方法。
【請求項4】
前記近似式の支配項が前記合成積算値の累乗根に比例する請求項1から3のいずれか一項に記載の速度算出方法。
【請求項5】
前記支配項において前記合成積算値の二乗根と前記対象者の身長の二乗根とを乗じることを含む請求項4に記載の速度算出方法。
【請求項6】
前記近似式が、前記支配項である第1項と、歩数に比例する第2項と、を含む請求項5に記載の速度算出方法。
【請求項7】
前記合成加速度が所定のカウント閾値に達したことを検知することに基づいて前記歩数を算出する請求項6に記載の速度算出方法。
【請求項8】
前記合成積算値が所定の閾値未満である場合に前記支配項に乗じる第一係数と、前記合成積算値が所定の閾値以上である場合に前記支配項に乗じる第二係数と、を相違させるとともに、前記第二係数が前記第一係数よりも大きいことを特徴とする請求項4から7のいずれか一項に記載の速度算出方法。
【請求項9】
予め設定された目標速度と、算出された前記速度と、の差分値が所定の乖離閾値を超えた場合に報知出力を行う請求項1から8のいずれか一項に記載の速度算出方法。
【請求項10】
歩行または走行する対象者の加速度を計測する加速度センサと、
前記加速度センサが計測した加速度を、歩行または走行の周期よりも長い単位時間に亘って積算して合成積算値を求める積算手段と、
予め求められた近似式を記憶しておく記憶手段と、
前記記憶手段を参照し、前記近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算手段と、
を備える速度算出装置。
【請求項11】
前記加速度センサが、前記対象者の直交三軸方向の加速度を計測し、
前記積算手段が、前記加速度センサが計測した前記直交三軸方向の加速度を合成した合成加速度を前記単位時間に亘って積算して前記合成積算値を求める請求項10に記載の速度算出装置。
【請求項12】
前記加速度センサが、重力方向を軸方向とする一軸方向の加速度を計測するか、または前記軸方向および当該軸方向と直交する方向からなる直交二軸方向の加速度を計測し、
前記積算手段が、前記加速度センサが計測した前記一軸方向の加速度または前記直交二軸方向の加速度を合成した合成加速度を、前記単位時間に亘って積算して前記合成積算値を求める請求項10に記載の速度算出装置。
【請求項13】
歩行または走行する対象者の加速度を計測する加速度センサを備える速度算出装置に速度算出処理を実行させるためのコンピュータプログラムであって、
前記速度算出処理が、
前記加速度センサが計測した前記加速度を、歩行または走行周期よりも長い単位時間に亘って積算して合成積算値を求める積算処理と、
予め求められた近似式に前記合成積算値を適用して前記対象者の速度を算出する速度演算処理と、
を含むコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−61319(P2013−61319A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2012−131582(P2012−131582)
【出願日】平成24年6月11日(2012.6.11)
【出願人】(000133179)株式会社タニタ (303)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成24年6月11日(2012.6.11)
【出願人】(000133179)株式会社タニタ (303)
[ Back to top ]