
速度計測装置
【課題】路面に対する移動体の速度を正確に計測する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体上に設けられ、路面に対する移動体の速度を計測する速度計測装置に関する。
【背景技術】
【0002】
車両等の移動体上に設けられ、路面に対する移動体の速度を計測する対地速度検出装置として、特許文献1及び2の発明が知られている。
【0003】
特許文献1の発明は、電波を発生する送信機と、車両から軌道面に上記電波を放射するアンテナと、軌道面から得られる反射電力と送信電力の一部とを混合してドップラー信号成分を得る混合器と、この混合器の出力から、ある一定レベル以上の信号を検出しこれをパルスに変換するパルス発生器及びカウンターとを備え、パルス数とパルスの始点、終点時刻を計測することによって走行距離と所要時間を求め、これから車両の走行速度を導出するように構成される。
【0004】
特許文献2の発明は、路面との距離を測定する第1の対地距離センサと、この第1の対地距離センサと車両進行方向に平行に該第1の対地距離センサと所定距離を有して配され、第1の対地処理センサから所定距離離れた地点の路面との距離を測定する第2の対地距離センサと、第1の対地距離センサからの距離信号に基づいて、車両が進行する路面をトレースする第1の路面トレース手段と、第2の対地距離センサからの距離信号に基づいて、車両が進行する路面をトレースする第2の路面トレース手段と、第1の路面トレース手段によってトレースされた路面の特徴と、第2の路面トレース手段によってトレースされた路面の特徴を比較し、第1の対地距離センサが通過した場所を第2の対地距離センサが通過する時間差を検出する時間遅れ検出手段と、この時間遅れ検出手段によって検出された時間差と、第1の対地距離センサと第2の対地距離センサの所定距離から、車両の対地速度を検出する対地速度検出手段とを具備する。
【0005】
計測した速度を用いることで、所定の基準点からの走行距離又は積算走行距離を計算することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭58−206991号公報。
【特許文献2】特開平6−138221号公報。
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の発明では、ドップラー信号に基づいて走行速度を決定しているので、車両が低速で移動している場合にはドップラー周波数が非常に低くなり、計測不能になる。そのため、特許文献1の発明では、低速移動は停止と判定され、積算走行距離に誤差が生じるという問題がある。
【0008】
特許文献2の発明では、2つの対地距離センサのそれぞれは、その直下の路面との距離を計測しているので、取得される路面の特徴情報は限定的である。特許文献2の発明では、速度を計測する際に限定的な特徴情報しか使用できないことに起因して、誤差が生じるおそれがある。
【0009】
本発明の課題は、以上の問題点を解決し、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明の速度計測装置によれば、
路面に対する移動体の速度を計測する速度計測装置であって、上記速度計測装置は、
上記移動体に設けられ、上記路面断面の上部形状を表す路面形状データを取得する路面形状センサと、
上記路面形状センサによって取得された路面形状データを格納するメモリと、
上記メモリに格納された上記第1及び第2の路面形状データに基づいて、上記移動体の速度を計算する演算手段とを備え、
上記路面形状センサは、上記路面に電波を放射し、上記路面形状センサからの距離が異なる上記路面上の複数の構造物によって反射された各反射波の信号レベルと、上記路面形状センサから上記各構造物までの伝搬距離とを測定することで、上記路面形状データを取得し、上記路面形状センサは、少なくとも第1及び第2の測定時間を含む複数の測定時間において上記路面形状データを取得し、上記第1の測定時間において第1の路面形状データを取得し、上記第2の測定時間において第2の路面形状データを取得し、
上記演算手段は、上記第1及び第2の路面形状データのそれぞれの伝搬距離を、上記路面に射影した水平距離に変換し、上記第1の路面形状データと類似する上記第2の路面形状データが取得されるときの上記第1の路面形状データと上記第2の路面形状データとの水平距離の差を決定し、上記水平距離の差を上記第1及び第2の測定時間の差で除算して上記移動体の速度を計算することを特徴とする。
【発明の効果】
【0011】
本発明によれば、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することができる。さらに、計測された速度を積算することにより、所定の基準点からの積算走行距離を計算することができる。さらに、移動する経路が予めわかっている場合には、計算された積算走行距離から現在位置を特定することもできる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1に係る速度計測装置を備えた車両10の構成を示す概略図である。
【図2】図1の距離センサ11の照射範囲101を示す、軌道の上面図である。
【図3】図1の距離センサ11の詳細構成を示すブロック図である。
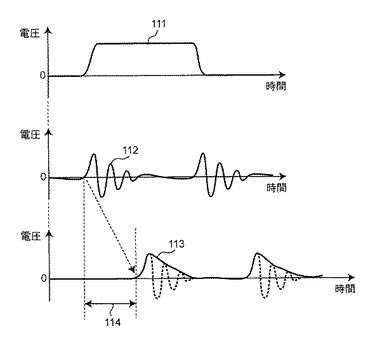
【図4】図3の距離センサコントローラ21によって発生される矩形波の送信信号の波形111と、図3のフィルタ22を通過後の送信信号の波形112と、図3の包絡線検波器27による検波後の受信信号の波形113とを示す図である。
【図5】図1の距離センサ11による路面5の測定を示す図である。
【図6】路面形状データが車両10の移動に伴って変化する様子を示す図である。
【図7】異なる測定時間における路面形状データのピークの変化を示す図である。
【図8】図1の演算装置13によって実行される速度及び距離演算処理を示すフローチャートである。
【図9】カルマンフィルタを用いたノイズ低減を説明するための図である。
【図10】本発明の実施の形態2に係る速度計測装置の距離センサの照射範囲101,102を示す、軌道の上面図である。
【図11】本発明の実施の形態3に係る電波反射体42を含む軌道の図である。
【図12】本発明の実施の形態4に係る電波反射体54を含む軌道の図である。
【図13】本発明の実施の形態5に係るエレベータ装置の構成を示す概略図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明の実施の形態に係る速度計測装置について説明する。各図にわたって、同様の構成要素は同じ参照番号で示す。図面中のXYZ座標を参照する。
【0014】
実施の形態1.
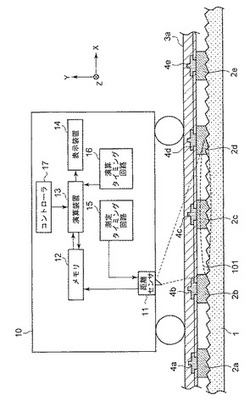
図1は、本発明の実施の形態1に係る速度計測装置を備えた車両10の構成を示す概略図である。実施の形態1の速度計測装置は、軌道上を走行する車両10上に設けられ、路面に対する車両10の速度を計測する。車両10は、図1の+X方向に進むものとする。軌道は、地面1、枕木2a〜2e、レール3a及び3b(図2を参照)、及び締結装置4a〜4j(図2を参照)からなり、レール3a及び3bは締結装置4a〜4jによって枕木2a〜2eに固定されている。車両10は、路面の形状(例えば、路面断面の上部形状)を表す路面形状データを取得する距離センサ11と、路面形状データを格納するメモリ12と、車両10の速度及び積算走行距離を演算する演算装置13と、演算結果を表示する表示装置14と、距離センサ11のためのタイミングパルス(以下、測定パルスという。)を周期的に発生する測定タイミング回路15と、演算装置13のためのタイミングパルス(以下、演算パルスという。)を周期的に発生する演算タイミング回路16と、積算走行距離の基点を表す基点パルスを演算装置13に入力するコントローラ17とを備える。
【0015】
距離センサ11は、車両10の下面に設けられる。距離センサ11は、電波を放射して軌道上のさまざまな構造物によって反射された複数の反射波を受信し、各反射波の信号レベルと、電波を放射してから各反射波が戻るまでの伝搬時間からわかる伝搬距離とを測定することで、路面形状データを取得する。伝搬距離は「伝搬時間×光速÷2」から得られる。ある伝搬距離における構造物からの反射波の信号レベルが高いことは、その構造物が、路面において特徴的な反射物(すなわち、枕木2a〜2e及び締結装置4a〜4jなど)であることを示す。測定タイミング回路15は、距離センサ11に測定を開始するタイミング(測定時間)を指示するための測定パルスを周期的に発生する。メモリ12は、距離センサ11により測定パルス毎に測定された路面形状データのうち、少なくとも2つの測定時間における路面形状データ(すなわち、前回の路面形状データと最新の路面形状データ)を格納する。演算装置13は、演算パルスが入力される毎に、メモリ12に格納された路面形状データに基づいて、図8を参照して後述する速度及び距離演算処理を実行することで、車両10の速度及び積算走行距離を演算する。コントローラ17は、外部のリセットボタン(図示せず。)からのリセット信号等に応答して、積算走行距離の基点を表す基点パルスを生成して演算装置13に入力する。
【0016】
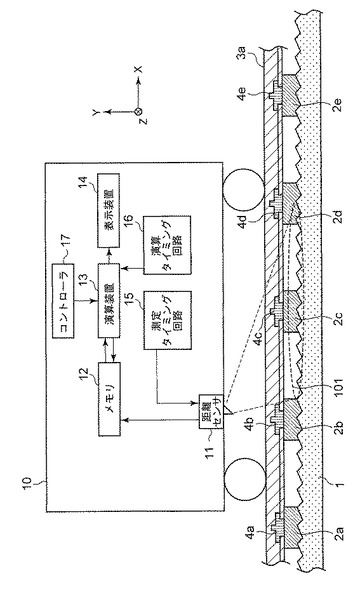
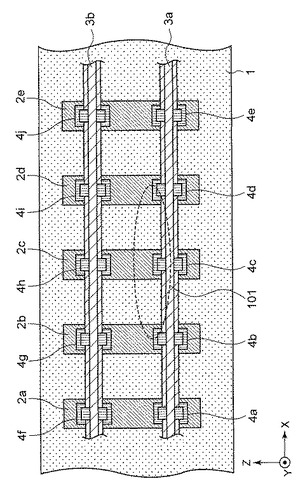
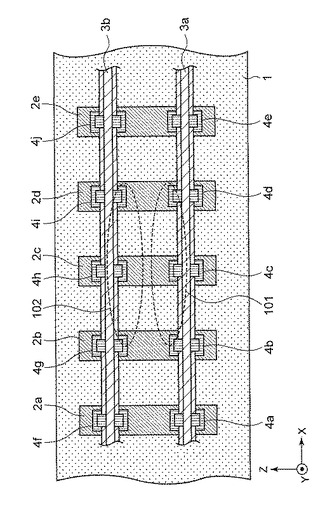
図2は、図1の距離センサ11の照射範囲101を示す、軌道の上面図である。距離センサ11は、その直下から前方までの範囲にわたって電波が照射されるように、特に締結装置4a〜4eのうちの複数個に電波が照射されるように、車両10の進行方向に沿って斜め前方に向かって電波を放射する。距離センサ11が電波を放射したとき、金属である締結装置4a〜4eから強い反射波が戻ってくる。締結装置4a〜4eの間隔は50〜60cm程度である。距離センサ11からあまり遠方を照射すると、車両10がカーブを走行時に電波が締結装置4a〜4eに当らなくなるので、例えば、距離センサ11の直下のやや後方(例えば、−X方向に10cm程度)から前方2m程度までに電波を照射する。距離センサ11は、レール3a(又は3b)の真上ではなく、例えばレール3a,3b間の中央付近において車両10の下面に設置され、電波を、斜めから(すなわちZ軸方向の成分を有して)締結装置4a〜4eに照射させる。これは、距離センサ11をレール3a,3bの真上に設置すると、レール3a,3bからの反射波によって他の構造物からの反射波が隠蔽され、十分な路面形状データを取得できなくなるからである。距離センサ11は、締結装置4a〜4eを十分観測できる程度に短い波長を有する電波を放射する。締結装置4a〜4eが直径40〜50mm程度のボルトを含む場合、電波の波長は10〜30mm程度が望ましい。距離センサ11から放射される電波の偏波は、レール3a,3bの長手方向に対して直交しているものとする。これにより、レール3a,3bからの反射を抑えることができる。
【0017】
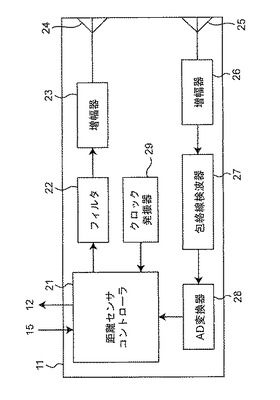
図3は、図1の距離センサ11の詳細構成を示すブロック図である。距離センサ11は、距離センサコントローラ21と、電波を放射するためのフィルタ22、増幅器23、及び送信アンテナ24と、反射波を受信するための受信アンテナ25、増幅器26、包絡線検波器27、及びアナログ・デジタル(AD)変換器28と、クロック発振器29とを備える。距離センサコントローラ21は、クロック発振器29から供給されるクロック信号に基づいて動作する。距離センサコントローラ21は、PLL(フェイズ・ロック・ループ)回路を内臓し(図示せず。)、供給されたクロック信号の周波数をPLL回路により逓倍することで高周波のクロック信号を生成して動作してもよい。距離センサコントローラ21は、測定タイミング回路15から測定パルスを受信する毎に路面の測定を行って路面形状データを生成し、メモリ12に送る。
【0018】
距離センサコントローラ21は、測定タイミング回路15から測定パルスを受信したとき、まず、距離センサコントローラ21のクロック信号に基づいて矩形波の送信信号を生成し、生成した送信信号をフィルタ22に送る。フィルタ22は矩形波の送信信号の高調波成分を取り出す。フィルタ22は、例えば、27〜29GHzの成分を通過させるチェビシェフI型フィルタである。これにより、フィルタ22は、28GHzを中心周波数とするパルス波の送信信号を出力する。図4に、距離センサコントローラ21によって発生される矩形波の送信信号の波形111と、フィルタ22を通過後の送信信号の波形112とを示す。このように、矩形波の立ち上がりエッジと立ち下がりエッジでパルス波が形成される。フィルタ22から出力されたパルス波の送信信号は、増幅器23により所定の出力電力まで増幅され、送信アンテナ24から放射される。送信アンテナ24は、照射範囲101(図1及び図2を参照)に向かって電波を放射する指向性アンテナである。送信アンテナ24から放射されたパルス波の電波は、地面1、枕木2a〜2e、及び締結装置4a〜4eなどの軌道上の構造物により反射され、反射波は受信アンテナ25で受信される。受信アンテナ25で受信されたパルス波の受信信号は、増幅器26により増幅されて包絡線検波器27に送られる。包絡線検波器27は、パルス波の受信信号を検波してその包絡線信号を生成する。図4に、包絡線検波器27による検波後の受信信号の波形113を示す。受信信号は、電波を放射してから反射波が戻るまでの伝搬時間を含む、送信信号に対する遅延時間114が経過した後に受信される。包絡線検波器27による検波後の受信信号は、AD変換器28によってAD変換され、距離センサコントローラ21に送られる。距離センサコントローラ21は、各反射波の信号レベルと、電波を放射してから各反射波が戻るまでの伝搬時間からわかる伝搬距離とを測定することで、路面形状データを生成する。距離センサ11と軌道上の複数の構造物との間の異なる伝搬距離を考慮して、電波の照射範囲101内において最も近い構造物からの反射波と最も遠い構造物からの反射波とを受信するように、距離センサコントローラ21は、所定時間にわたって受信信号の取り込みを継続する。前述のように、距離センサ11の直下のやや後方から前方2mまでの照射範囲で電波を放射する場合には、受信信号の取り込みを継続する時間は、「2m÷光速×2=約13ナノ秒」であるので、余裕をみて20ナノ秒程度とする。距離センサ11の内部回路における信号伝送時間は予め測定され、距離センサコントローラ21は、路面形状データを生成するとき、電波の伝搬時間のみを考慮することができる。距離センサコントローラ21は、最後に、生成された路面状態データをメモリ12に送る。距離センサ11は、測定タイミング回路15から測定パルスを受信する毎に以上の処理を繰り返す。
【0019】
距離センサコントローラ21は、例えばFPGAによって構成してもよい。
【0020】
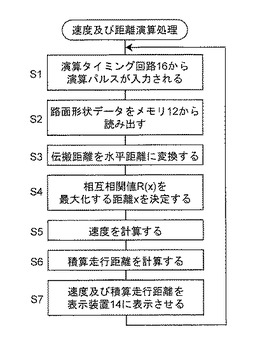
図8は、図1の演算装置13によって実行される速度及び距離演算処理を示すフローチャートである。
【0021】
ステップS1において、演算タイミング回路16から演算パルスが入力される。演算装置13は、演算パルスが入力される毎に、メモリ12に格納された路面形状データから車両10の速度を計算するとともに、演算パルスが入力された時点からの走行距離を計算し、計算された走行距離から積算走行距離を計算する。ステップS2において、前回の測定時間における路面形状データと、現在の測定時間における路面形状データとをメモリ12から読み出し、演算装置13に内蔵した一時メモリ(図示せず。)に格納する。ステップS3において、路面形状データの伝搬距離を、路面に射影した水平距離に変換する。
【0022】
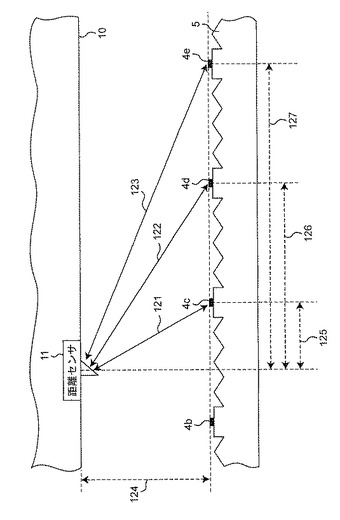
図5は、図1の距離センサ11による路面5の測定を示す図である。図示の簡単化のために、地面1及び枕木2a〜2eをまとめて、路面5として示す。
図5を参照すると、距離センサ11から電波を放射して路面からの反射波を受信することにより、距離センサ11から締結装置4c〜4eまでの伝搬距離121〜123が測定されている。
路面5から車両10までの高さ124は、距離センサ11がその直下の路面5(又は締結装置)からの反射波を受信したときの伝搬距離、すなわち伝搬距離の最小値からわかる。
Rを伝搬距離として、Hを路面5から車両10までの高さ124とすると、距離センサ11から軌道上の構造物までの水平距離(すなわち路面上に射影された距離)を次式により得ることができる。
【0023】
【数1】

【0024】
数1により、伝搬距離121〜123は水平距離123〜127に変換される。水平距離123〜127は、路面5上の実際の距離に一致する。
【0025】
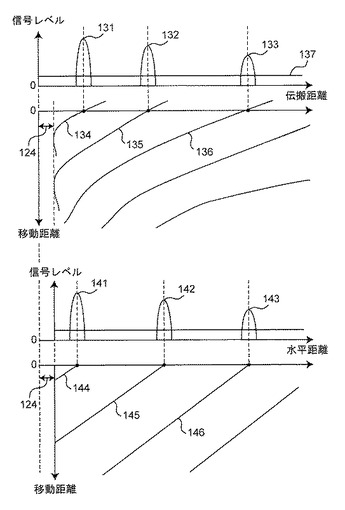
図6は、路面形状データが車両10の移動に伴って変化する様子を示す図である。図6の最上段のグラフは、伝搬距離(図5の伝搬距離121〜123)で表された路面形状データである。反射波のピーク131〜133は、距離センサ11から締結装置4c〜4eまでの伝搬距離と、電波を放射して締結装置4c〜4eによって反射された各反射波の信号レベルとを示す。図6の上から2段目のグラフは、車両10の移動に伴って反射波のピーク131〜133(それぞれ、参照番号134〜136で示す。)が変化する様子を示す。2段目のグラフもまた、最上段のグラフと同様に、伝搬距離で表された路面形状データを示す。2段目のグラフによれば、車両10が移動するに応じて、伝搬距離が次第に短くなっていることがわかる。前述のように、伝搬距離の最小値は、路面5から車両10までの高さ124である。演算装置13は、伝搬距離の最小値を、演算装置13に内蔵した不揮発性メモリ(図示せず。)に格納し、演算装置13の動作中に常に更新する。演算装置13は、電源投入時には、その不揮発性メモリから伝搬距離の最小値を読み出す。図6の3段目のグラフは、数1により伝搬距離から変換された水平距離(図5の水平距離125〜127)で表された路面形状データである。反射波のピーク141〜143は、最上段のグラフの反射波のピーク131〜133に対応し、距離センサ11から締結装置4c〜4eまでの水平距離と、電波を放射して締結装置4c〜4eによって反射された各反射波の信号レベルとを示す。図6の最下段のグラフは、車両10の移動に伴って反射波のピーク141〜143(それぞれ、参照番号144〜146で示す。)が変化する様子を示す。最下段のグラフもまた、3段目のグラフと同様に、水平距離で表された路面形状データを示す。伝搬距離は、車両10の移動に対して非線形に変化するが、水平距離は線形に変化する。従って、車両10が等速で移動する場合は、最下段のグラフに示すように反射波のピーク144〜146は直線になる。また、例えば、締結装置4c〜4eが地面1に等間隔で配置されている場合、伝搬距離121〜123は均等にはならないが、水平距離125〜127は均等になる。
【0026】
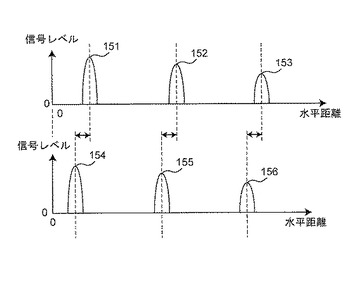
ステップS4において、水平距離を変数xとする前回の測定時間における路面形状データと現在の測定時間における路面形状データとの相互相関値R(x)を計算し、相互相関値R(x)を最大化する距離xを決定する。この距離xは、前回の測定時間と現在の測定時間との間に車両10が移動した距離を表す。図7は、異なる測定時間における路面形状データのピークの変化を示す図である。図7の上段のグラフは、前回の測定時間における路面形状データ(反射波のピーク151〜153を含む。)を示し、図7の下段のグラフは、現在の測定時間における路面形状データ(反射波のピーク154〜156を含む。)を示す。図7において、例えば、反射波のピーク151,154は同じ締結装置4cからの反射波のピークを示し、反射波のピーク152,155は同じ締結装置4dからの反射波のピークを示し、反射波のピーク153,156は同じ締結装置4eからの反射波のピークを示す。図7の場合では、反射波のピーク151,154間の水平距離、反射波のピーク152,155間の水平距離、反射波のピーク153,156間の水平距離が、前回の測定時間と現在の測定時間との間に移動した距離である。具体的には、次式に示す相互相関値R(x)を最大化する距離xを決定することにより、前回の測定時間と現在の測定時間との間に移動した距離を求める。
【0027】
【数2】
【0028】
ここで、A(m)は、前回の測定時間における、水平距離mで表された路面形状データであり、B(m)は、現在の測定時間における、水平距離mで表された路面形状データである。Mは水平距離の最大値である。
【0029】
ステップS5において、数2により決定された距離xを前回の測定時間と現在の測定時間との間の経過時間により除算して車両10の速度を計算する。なお、前回の測定時間と現在の測定時間との間の経過時間は、測定タイミング回路15の測定パルスの周期と同じである。ステップS6において、計算された速度に演算パルスの周期を乗算することにより演算パルスが入力されてからの走行距離を計算し、計算された走行距離を積算することで、基点(すなわち、コントローラ17から基点パルスが入力されたときの車両10の位置)からの積算走行距離を計算する。ステップS7において、速度及び積算走行距離を表示装置14に表示させ、ステップS1に戻る。
【0030】
車両10の速度は、加速または減速により変動する。このとき、反射波のピークは、図6の最下段のグラフのように直線にはならない。しかし、本発明の実施の形態によれば、
前回の測定時間と現在の測定時間との間に移動した距離から速度及び走行距離を計算し、計算された走行距離を積算するので、途中で速度が変動していても関係なく、速度を計算する2つの測定時間毎に移動する距離は確定している。つまり、車両10の速度の変動に関係なく、正確に積算走行距離を計算することができる。
【0031】
実施の形態1では、パルス波の送信信号を用いて、距離センサ11から軌道上の構造物までの伝搬距離を求めたが、FM−CW方式、スペクトル拡散方式、チャープパルス方式など、距離を測定できる他の方式を用いてもよい。
【0032】
ここで、図6の最上段のグラフに示すしきい値137について補足する。距離センサ11の電波の照射範囲101は、軌道の長手方向に対して横方向に多少は広がりを有する。そのため、距離センサ11は、レール3a,3bより外側の構造物からの反射波を受信することもある。レール3a,3bより外側の構造物の伝搬距離の変化は、見かけ上、車両10の速度より遅い。そのため、レール3a,3bより外側の構造物からの反射波に基づいて速度を計算すると、誤差が生じる。さいわい、レール3a,3bより外側の構造物は照射範囲101より外側にあるので、受信時の信号レベルは低い。よって、しきい値137を適切な値に設定し、そのような信号レベルが低い反射波に基づいて速度を計算しないようにしている。
【0033】
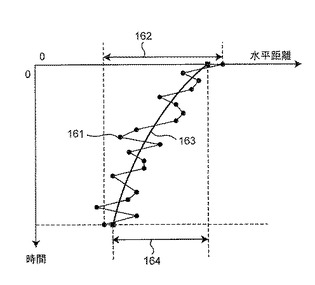
ところで、速度及び積算走行距離の誤差は、車体10の振動による高さ124のずれ、距離センサ11の受信雑音などがある。これらの誤差要因は、伝搬距離や水平距離の誤差として現れる。この誤差を低減するために、過去の数個の測定時間における路面形状データを使ってフィルタリングを行う。このフィルタリングにはカルマンフィルタが最適である。カルマンフィルタは、車両10の動特性を用いてフィルタリングすることができる。移動平均フィルタを用いた場合には、突発的なノイズに影響を受ける。しかし、カルマンフィルタを使用すると、車両10の動特性を越えるような突発的なノイズには影響を受けない。これらのことは一般的に知られたカルマンフィルタの特性であるが、本発明の実施の形態にとってカルマンフィルタが有利な点は以下にある。それは、いくつかの測定時間にわたる路面形状データのうちの両端の測定時間における路面形状データを使用できることということにある。速度及び積算走行距離の誤差を低減するためには、車両10が移動する距離をなるべく広い時間にわたって測定することが望ましい。移動平均フィルタを用いた場合には両端の測定時間における路面形状データに誤差が残るが、カルマンフィルタは両端の測定時間における路面形状データの誤差を取り除いてくれる。図9は、カルマンフィルタを用いたノイズ低減を説明するための図である。ここでは、路面形状データの1つの反射波のピークに対してカルマルフィルタを適用した場合を示す。参照番号161の線は、カルマンフィルタ処理前の反射波のピークが時間的に変化する様子を示す。これは、車両10が減速しているときの様子である。測定時間毎の反射波のピークを、反射波のピーク161の線上の丸印で示す。反射波のピーク161の水平距離の最大値及び最小値の差が、カルマンフィルタ処理前の変動幅162であるが、誤差を含んでいる。参照番号163の線は、カルマンフィルタ処理後の反射波のピークが時間的に変化する様子を示す。参照番号163の線では、両端の測定時間における路面形状データではノイズが抑圧され、カルマンフィルタ処理後の変動幅164によれば、誤差が低減していることがわかる。
【0034】
以上説明したように、本発明の実施の形態1によれば、地面1、枕木2a〜2e、締結装置4a〜4jなど、軌道上の構造物に電波を斜めから照射し、これらの構造物によって反射された各反射波の信号レベルと、距離センサ11からこれらの構造物までの伝搬距離とを含む路面形状データを取得し、水平距離で表された路面形状データを求め、その水平距離で表された路面形状データの時間的な変化から、少ない誤差で車両10の速度を計測することができ、さらに、少ない誤差で車両10の積算走行距離を計算することができる。本発明の実施の形態1によれば、車両10の速度が非常に低速であっても、正確に速度及び積算走行距離を求めることができる。
【0035】
また、本発明の実施の形態1によれば、レール3a,3bの長手方向に対して直交する偏波を有する電波を放射することで、レール3a,3bからの強い反射を抑えることができ、伝搬距離を確実に求めることができ、少ない誤差で車両10の速度を計測することができる。
【0036】
また、本発明の実施の形態1によれば、波長10〜30mmの電波を用いることで、締結装置4a〜4jで電波が強く反射し、伝搬距離を確実に求めることができ、少ない誤差で車両10の速度を計測することができる。
【0037】
ところで、車両10の速度を計測するとき、従来技術では、よくドップラー周波数が利用されている。しかし、本質的には、ドップラー速度計の電波を地面1に斜めから照射するとき、ドップラー速度計の遠方からの反射波と近傍からの反射波ではドップラー周波数が異なるので、反射波は複数の周波数成分が混じったドップラー信号となる。このようなドップラー信号は非常に複雑な波形を有し、このようなドップラー信号から速度を計算すると大きな誤差が生じるという問題がある。本発明の実施の形態1は、ドップラー周波数を一切利用せず、パルス波の電波を放射することで路面形状データを取得し、距離センサ11で取得した路面形状データの時間的な変化から車両10の速度を計算するので、少ない誤差で車両10の速度を計測することができ、さらに、少ない誤差で車両10の積算走行距離を計算することができる。
【0038】
実施の形態2.
図10は、本発明の実施の形態2に係る速度計測装置の距離センサの照射範囲101,102を示す、軌道の上面図である。軌道のカーブが非常に急峻な線区では誤差が増大する。レール3a,3b間の中央(すなわち、距離センサ11を設ける位置)と、レール3aの近傍の位置(すなわち、距離センサ11による電波の照射範囲101)では、円弧の長さが異なるためである。この問題に対処するために、2つの速度計測装置を車両に設け、一方の速度計測装置により、レール3aの近傍の照射範囲101に電波を放射し、他方の速度計測装置により、レール3bの近傍の照射範囲102に電波を放射し、2つの速度計測装置によってそれぞれ計測された速度の平均をとる。実施の形態2によれば、レール3a,3bのカーブが非常に急峻な線区であっても誤差を低減することができる。
【0039】
実施の形態3.
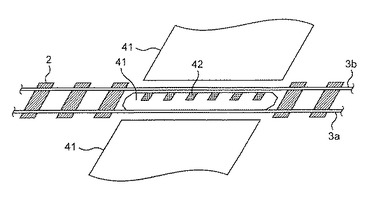
図11は、本発明の実施の形態3に係る電波反射体42を含む軌道の図である。軌道が道路41と交差する場合(踏切等)、道路41と交差している軌道の部分には枕木2及び締結装置を露出させることができないので、十分な路面形状データを取得することができない。実施の形態3では、道路41と交差している軌道の部分のレール3a,3b間において、レール3a,3bに沿って所定間隔で電波反射体42を並べている。実施の形態1では、通常の軌道上の構造物(例えば締結装置4a〜4e)に電波を放射していたが、実施の形態3では、電波を反射させるための電波反射体42を特に配置しておくものである。電波反射体42は、三角柱形のくぼみを持った金属などで構成できるが、その他、電波を強く反射させるものであれば任意の材料及び構造物を使用することができる。以上説明したように、実施の形態3によれば、踏み切りなどにおいて枕木や締結装置が見えない状態であっても、正確に車両の速度を計測することができる。
【0040】
実施の形態4.
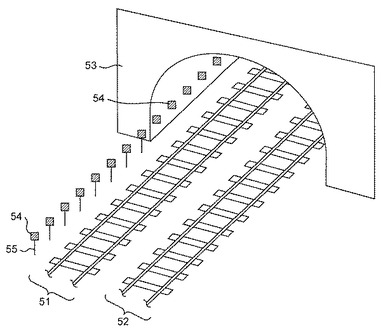
図12は、本発明の実施の形態4に係る電波反射体54を含む軌道の図である。実施の形態1〜5では、距離センサを車両10の下面に設置し、路面に電波を照射して路面に対する車両10の速度を計測した。本発明の実施の形態の距離センサに求められる要件は、距離センサの進行方向と、距離センサにより電波が照射される面とが平行であればよい。従って、例えば、車両10の横に距離センサを設置し、さらに、車両10の横に車両10からそれぞれ等距離に位置するように、複数の電波反射体54を車両10の進行方向(軌道51,52の長手方向)に沿って周期的に並べて設置してもよい。電波反射体54は、三角柱形のくぼみを持った金属などで構成できるが、その他、電波を強く反射させるものであれば任意の材料及び構造物を使用することができる。電波反射体54は、支柱55の上に設けられてもよく、又は、トンネル53等の壁面に設けられてもよい。また、車両10の天井に距離センサを設置し、トンネル53の天井に複数の電波反射体54を車両10の進行方向に沿って周期的に並べて設置してもよい。
【0041】
実施の形態5.
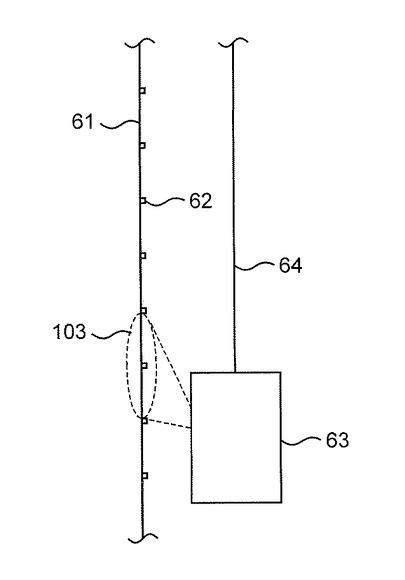
図13は、本発明の実施の形態5に係るエレベータ装置の構成を示す概略図である。実施の形態1〜6では軌道上を走行する車両10を例にとったが、本発明の実施の形態は、軌道上を移動する移動体であるならば任意の装置に適用可能であり、図13に示すようにエレベータ装置に適用することもできる。図13のエレベータ装置は、壁面61及び周期的に設けられた複数の鉄骨62を含む昇降路(図示の簡単化のために1つ壁面のみを示す。)と、昇降路内をロープ64によって昇降するかご63とを備えて構成される。かご63は、実施の形態1等と同様に構成された速度計測装置を備え、その距離センサにより壁面61及び鉄骨62に電波を放射する(照射範囲103)。かご63の距離センサから電波を放射して壁面61及び鉄骨62によって反射された各反射波の信号レベルと、距離センサから壁面61及び鉄骨62までの伝搬距離とを測定することで、路面形状データを取得する。鉄骨62によって、反射波にピークが生じる。壁面61には、実施の形態3,4と同様に、電波を反射させるための電波反射体を特に配置してもよい。
【0042】
本発明の実施の形態は、軌道上を移動する移動体に限定されず、距離センサによって路面形状データを取得可能であるならば、任意の路面と任意の移動体に適用可能である。
【産業上の利用可能性】
【0043】
本発明によれば、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することができる。さらに、計測された速度を積算することにより、所定の基準点からの積算走行距離を計算することができる。さらに、移動する経路が予めわかってい
【0044】
電波を放射して路面上の構造物から反射される反射波から路面形状データを取得し、取得される路面形状データの時間的な変化から車両の移動距離を計測するので、移動体の速度を正確に計測することができる。また、車両の速度が非常に低速であっても、正確に速度を求められる。
【0045】
レールの枕木や締結装置に電波を照射し、枕木や締結装置からの強い反射波を受信することで、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
【0046】
レールの長手方向に対して直交する偏波を有する電波を放射することで、レールからの強い反射を抑えることができ、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
【0047】
波長10〜30mmの電波を用いることで、締結装置で電波が強く反射し、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
る場合には、計算された積算走行距離から現在位置を特定することもできる。
【符号の説明】
【0048】
1 地面、2,2a〜2e 枕木、3a,3b レール、4a〜4j 締結装置、5 路面、10 車両、11 距離センサ、12 メモリ、13 演算装置、14 表示装置、15 測定タイミング回路、16 演算タイミング回路、17 コントローラ、21 距離センサコントローラ、22 フィルタ、23,26 増幅器、24 送信アンテナ、25 受信アンテナ、27 包絡線検波器、28 AD変換器、29 クロック発振器、41 道路、42 電波反射体、51,52 軌道、53 トンネル、54 電波反射体、55 支柱、61 壁面、62 鉄骨、63 かご、64 ロープ、101〜103 電波の照射範囲、111 距離センサコントローラ21によって発生される矩形波の送信信号の波形、112 フィルタ22を通過後の送信信号の波形、113 包絡線検波器27による検波後の受信信号の波形、114 遅延時間、121〜123 伝搬距離、124 路面5から車両10までの高さ、125〜127 水平距離、131〜136 反射波のピーク、141〜146 反射波のピーク、151〜156 反射波のピーク、161 カルマンフィルタ処理前の反射波のピーク、162 カルマンフィルタ処理前の変動幅、163 カルマンフィルタ処理後の反射波のピーク、164 カルマンフィルタ処理後の変動幅。
【技術分野】
【0001】
本発明は、車両等の移動体上に設けられ、路面に対する移動体の速度を計測する速度計測装置に関する。
【背景技術】
【0002】
車両等の移動体上に設けられ、路面に対する移動体の速度を計測する対地速度検出装置として、特許文献1及び2の発明が知られている。
【0003】
特許文献1の発明は、電波を発生する送信機と、車両から軌道面に上記電波を放射するアンテナと、軌道面から得られる反射電力と送信電力の一部とを混合してドップラー信号成分を得る混合器と、この混合器の出力から、ある一定レベル以上の信号を検出しこれをパルスに変換するパルス発生器及びカウンターとを備え、パルス数とパルスの始点、終点時刻を計測することによって走行距離と所要時間を求め、これから車両の走行速度を導出するように構成される。
【0004】
特許文献2の発明は、路面との距離を測定する第1の対地距離センサと、この第1の対地距離センサと車両進行方向に平行に該第1の対地距離センサと所定距離を有して配され、第1の対地処理センサから所定距離離れた地点の路面との距離を測定する第2の対地距離センサと、第1の対地距離センサからの距離信号に基づいて、車両が進行する路面をトレースする第1の路面トレース手段と、第2の対地距離センサからの距離信号に基づいて、車両が進行する路面をトレースする第2の路面トレース手段と、第1の路面トレース手段によってトレースされた路面の特徴と、第2の路面トレース手段によってトレースされた路面の特徴を比較し、第1の対地距離センサが通過した場所を第2の対地距離センサが通過する時間差を検出する時間遅れ検出手段と、この時間遅れ検出手段によって検出された時間差と、第1の対地距離センサと第2の対地距離センサの所定距離から、車両の対地速度を検出する対地速度検出手段とを具備する。
【0005】
計測した速度を用いることで、所定の基準点からの走行距離又は積算走行距離を計算することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭58−206991号公報。
【特許文献2】特開平6−138221号公報。
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の発明では、ドップラー信号に基づいて走行速度を決定しているので、車両が低速で移動している場合にはドップラー周波数が非常に低くなり、計測不能になる。そのため、特許文献1の発明では、低速移動は停止と判定され、積算走行距離に誤差が生じるという問題がある。
【0008】
特許文献2の発明では、2つの対地距離センサのそれぞれは、その直下の路面との距離を計測しているので、取得される路面の特徴情報は限定的である。特許文献2の発明では、速度を計測する際に限定的な特徴情報しか使用できないことに起因して、誤差が生じるおそれがある。
【0009】
本発明の課題は、以上の問題点を解決し、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明の速度計測装置によれば、
路面に対する移動体の速度を計測する速度計測装置であって、上記速度計測装置は、
上記移動体に設けられ、上記路面断面の上部形状を表す路面形状データを取得する路面形状センサと、
上記路面形状センサによって取得された路面形状データを格納するメモリと、
上記メモリに格納された上記第1及び第2の路面形状データに基づいて、上記移動体の速度を計算する演算手段とを備え、
上記路面形状センサは、上記路面に電波を放射し、上記路面形状センサからの距離が異なる上記路面上の複数の構造物によって反射された各反射波の信号レベルと、上記路面形状センサから上記各構造物までの伝搬距離とを測定することで、上記路面形状データを取得し、上記路面形状センサは、少なくとも第1及び第2の測定時間を含む複数の測定時間において上記路面形状データを取得し、上記第1の測定時間において第1の路面形状データを取得し、上記第2の測定時間において第2の路面形状データを取得し、
上記演算手段は、上記第1及び第2の路面形状データのそれぞれの伝搬距離を、上記路面に射影した水平距離に変換し、上記第1の路面形状データと類似する上記第2の路面形状データが取得されるときの上記第1の路面形状データと上記第2の路面形状データとの水平距離の差を決定し、上記水平距離の差を上記第1及び第2の測定時間の差で除算して上記移動体の速度を計算することを特徴とする。
【発明の効果】
【0011】
本発明によれば、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することができる。さらに、計測された速度を積算することにより、所定の基準点からの積算走行距離を計算することができる。さらに、移動する経路が予めわかっている場合には、計算された積算走行距離から現在位置を特定することもできる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1に係る速度計測装置を備えた車両10の構成を示す概略図である。
【図2】図1の距離センサ11の照射範囲101を示す、軌道の上面図である。
【図3】図1の距離センサ11の詳細構成を示すブロック図である。
【図4】図3の距離センサコントローラ21によって発生される矩形波の送信信号の波形111と、図3のフィルタ22を通過後の送信信号の波形112と、図3の包絡線検波器27による検波後の受信信号の波形113とを示す図である。
【図5】図1の距離センサ11による路面5の測定を示す図である。
【図6】路面形状データが車両10の移動に伴って変化する様子を示す図である。
【図7】異なる測定時間における路面形状データのピークの変化を示す図である。
【図8】図1の演算装置13によって実行される速度及び距離演算処理を示すフローチャートである。
【図9】カルマンフィルタを用いたノイズ低減を説明するための図である。
【図10】本発明の実施の形態2に係る速度計測装置の距離センサの照射範囲101,102を示す、軌道の上面図である。
【図11】本発明の実施の形態3に係る電波反射体42を含む軌道の図である。
【図12】本発明の実施の形態4に係る電波反射体54を含む軌道の図である。
【図13】本発明の実施の形態5に係るエレベータ装置の構成を示す概略図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明の実施の形態に係る速度計測装置について説明する。各図にわたって、同様の構成要素は同じ参照番号で示す。図面中のXYZ座標を参照する。
【0014】
実施の形態1.
図1は、本発明の実施の形態1に係る速度計測装置を備えた車両10の構成を示す概略図である。実施の形態1の速度計測装置は、軌道上を走行する車両10上に設けられ、路面に対する車両10の速度を計測する。車両10は、図1の+X方向に進むものとする。軌道は、地面1、枕木2a〜2e、レール3a及び3b(図2を参照)、及び締結装置4a〜4j(図2を参照)からなり、レール3a及び3bは締結装置4a〜4jによって枕木2a〜2eに固定されている。車両10は、路面の形状(例えば、路面断面の上部形状)を表す路面形状データを取得する距離センサ11と、路面形状データを格納するメモリ12と、車両10の速度及び積算走行距離を演算する演算装置13と、演算結果を表示する表示装置14と、距離センサ11のためのタイミングパルス(以下、測定パルスという。)を周期的に発生する測定タイミング回路15と、演算装置13のためのタイミングパルス(以下、演算パルスという。)を周期的に発生する演算タイミング回路16と、積算走行距離の基点を表す基点パルスを演算装置13に入力するコントローラ17とを備える。
【0015】
距離センサ11は、車両10の下面に設けられる。距離センサ11は、電波を放射して軌道上のさまざまな構造物によって反射された複数の反射波を受信し、各反射波の信号レベルと、電波を放射してから各反射波が戻るまでの伝搬時間からわかる伝搬距離とを測定することで、路面形状データを取得する。伝搬距離は「伝搬時間×光速÷2」から得られる。ある伝搬距離における構造物からの反射波の信号レベルが高いことは、その構造物が、路面において特徴的な反射物(すなわち、枕木2a〜2e及び締結装置4a〜4jなど)であることを示す。測定タイミング回路15は、距離センサ11に測定を開始するタイミング(測定時間)を指示するための測定パルスを周期的に発生する。メモリ12は、距離センサ11により測定パルス毎に測定された路面形状データのうち、少なくとも2つの測定時間における路面形状データ(すなわち、前回の路面形状データと最新の路面形状データ)を格納する。演算装置13は、演算パルスが入力される毎に、メモリ12に格納された路面形状データに基づいて、図8を参照して後述する速度及び距離演算処理を実行することで、車両10の速度及び積算走行距離を演算する。コントローラ17は、外部のリセットボタン(図示せず。)からのリセット信号等に応答して、積算走行距離の基点を表す基点パルスを生成して演算装置13に入力する。
【0016】
図2は、図1の距離センサ11の照射範囲101を示す、軌道の上面図である。距離センサ11は、その直下から前方までの範囲にわたって電波が照射されるように、特に締結装置4a〜4eのうちの複数個に電波が照射されるように、車両10の進行方向に沿って斜め前方に向かって電波を放射する。距離センサ11が電波を放射したとき、金属である締結装置4a〜4eから強い反射波が戻ってくる。締結装置4a〜4eの間隔は50〜60cm程度である。距離センサ11からあまり遠方を照射すると、車両10がカーブを走行時に電波が締結装置4a〜4eに当らなくなるので、例えば、距離センサ11の直下のやや後方(例えば、−X方向に10cm程度)から前方2m程度までに電波を照射する。距離センサ11は、レール3a(又は3b)の真上ではなく、例えばレール3a,3b間の中央付近において車両10の下面に設置され、電波を、斜めから(すなわちZ軸方向の成分を有して)締結装置4a〜4eに照射させる。これは、距離センサ11をレール3a,3bの真上に設置すると、レール3a,3bからの反射波によって他の構造物からの反射波が隠蔽され、十分な路面形状データを取得できなくなるからである。距離センサ11は、締結装置4a〜4eを十分観測できる程度に短い波長を有する電波を放射する。締結装置4a〜4eが直径40〜50mm程度のボルトを含む場合、電波の波長は10〜30mm程度が望ましい。距離センサ11から放射される電波の偏波は、レール3a,3bの長手方向に対して直交しているものとする。これにより、レール3a,3bからの反射を抑えることができる。
【0017】
図3は、図1の距離センサ11の詳細構成を示すブロック図である。距離センサ11は、距離センサコントローラ21と、電波を放射するためのフィルタ22、増幅器23、及び送信アンテナ24と、反射波を受信するための受信アンテナ25、増幅器26、包絡線検波器27、及びアナログ・デジタル(AD)変換器28と、クロック発振器29とを備える。距離センサコントローラ21は、クロック発振器29から供給されるクロック信号に基づいて動作する。距離センサコントローラ21は、PLL(フェイズ・ロック・ループ)回路を内臓し(図示せず。)、供給されたクロック信号の周波数をPLL回路により逓倍することで高周波のクロック信号を生成して動作してもよい。距離センサコントローラ21は、測定タイミング回路15から測定パルスを受信する毎に路面の測定を行って路面形状データを生成し、メモリ12に送る。
【0018】
距離センサコントローラ21は、測定タイミング回路15から測定パルスを受信したとき、まず、距離センサコントローラ21のクロック信号に基づいて矩形波の送信信号を生成し、生成した送信信号をフィルタ22に送る。フィルタ22は矩形波の送信信号の高調波成分を取り出す。フィルタ22は、例えば、27〜29GHzの成分を通過させるチェビシェフI型フィルタである。これにより、フィルタ22は、28GHzを中心周波数とするパルス波の送信信号を出力する。図4に、距離センサコントローラ21によって発生される矩形波の送信信号の波形111と、フィルタ22を通過後の送信信号の波形112とを示す。このように、矩形波の立ち上がりエッジと立ち下がりエッジでパルス波が形成される。フィルタ22から出力されたパルス波の送信信号は、増幅器23により所定の出力電力まで増幅され、送信アンテナ24から放射される。送信アンテナ24は、照射範囲101(図1及び図2を参照)に向かって電波を放射する指向性アンテナである。送信アンテナ24から放射されたパルス波の電波は、地面1、枕木2a〜2e、及び締結装置4a〜4eなどの軌道上の構造物により反射され、反射波は受信アンテナ25で受信される。受信アンテナ25で受信されたパルス波の受信信号は、増幅器26により増幅されて包絡線検波器27に送られる。包絡線検波器27は、パルス波の受信信号を検波してその包絡線信号を生成する。図4に、包絡線検波器27による検波後の受信信号の波形113を示す。受信信号は、電波を放射してから反射波が戻るまでの伝搬時間を含む、送信信号に対する遅延時間114が経過した後に受信される。包絡線検波器27による検波後の受信信号は、AD変換器28によってAD変換され、距離センサコントローラ21に送られる。距離センサコントローラ21は、各反射波の信号レベルと、電波を放射してから各反射波が戻るまでの伝搬時間からわかる伝搬距離とを測定することで、路面形状データを生成する。距離センサ11と軌道上の複数の構造物との間の異なる伝搬距離を考慮して、電波の照射範囲101内において最も近い構造物からの反射波と最も遠い構造物からの反射波とを受信するように、距離センサコントローラ21は、所定時間にわたって受信信号の取り込みを継続する。前述のように、距離センサ11の直下のやや後方から前方2mまでの照射範囲で電波を放射する場合には、受信信号の取り込みを継続する時間は、「2m÷光速×2=約13ナノ秒」であるので、余裕をみて20ナノ秒程度とする。距離センサ11の内部回路における信号伝送時間は予め測定され、距離センサコントローラ21は、路面形状データを生成するとき、電波の伝搬時間のみを考慮することができる。距離センサコントローラ21は、最後に、生成された路面状態データをメモリ12に送る。距離センサ11は、測定タイミング回路15から測定パルスを受信する毎に以上の処理を繰り返す。
【0019】
距離センサコントローラ21は、例えばFPGAによって構成してもよい。
【0020】
図8は、図1の演算装置13によって実行される速度及び距離演算処理を示すフローチャートである。
【0021】
ステップS1において、演算タイミング回路16から演算パルスが入力される。演算装置13は、演算パルスが入力される毎に、メモリ12に格納された路面形状データから車両10の速度を計算するとともに、演算パルスが入力された時点からの走行距離を計算し、計算された走行距離から積算走行距離を計算する。ステップS2において、前回の測定時間における路面形状データと、現在の測定時間における路面形状データとをメモリ12から読み出し、演算装置13に内蔵した一時メモリ(図示せず。)に格納する。ステップS3において、路面形状データの伝搬距離を、路面に射影した水平距離に変換する。
【0022】
図5は、図1の距離センサ11による路面5の測定を示す図である。図示の簡単化のために、地面1及び枕木2a〜2eをまとめて、路面5として示す。
図5を参照すると、距離センサ11から電波を放射して路面からの反射波を受信することにより、距離センサ11から締結装置4c〜4eまでの伝搬距離121〜123が測定されている。
路面5から車両10までの高さ124は、距離センサ11がその直下の路面5(又は締結装置)からの反射波を受信したときの伝搬距離、すなわち伝搬距離の最小値からわかる。
Rを伝搬距離として、Hを路面5から車両10までの高さ124とすると、距離センサ11から軌道上の構造物までの水平距離(すなわち路面上に射影された距離)を次式により得ることができる。
【0023】
【数1】
【0024】
数1により、伝搬距離121〜123は水平距離123〜127に変換される。水平距離123〜127は、路面5上の実際の距離に一致する。
【0025】
図6は、路面形状データが車両10の移動に伴って変化する様子を示す図である。図6の最上段のグラフは、伝搬距離(図5の伝搬距離121〜123)で表された路面形状データである。反射波のピーク131〜133は、距離センサ11から締結装置4c〜4eまでの伝搬距離と、電波を放射して締結装置4c〜4eによって反射された各反射波の信号レベルとを示す。図6の上から2段目のグラフは、車両10の移動に伴って反射波のピーク131〜133(それぞれ、参照番号134〜136で示す。)が変化する様子を示す。2段目のグラフもまた、最上段のグラフと同様に、伝搬距離で表された路面形状データを示す。2段目のグラフによれば、車両10が移動するに応じて、伝搬距離が次第に短くなっていることがわかる。前述のように、伝搬距離の最小値は、路面5から車両10までの高さ124である。演算装置13は、伝搬距離の最小値を、演算装置13に内蔵した不揮発性メモリ(図示せず。)に格納し、演算装置13の動作中に常に更新する。演算装置13は、電源投入時には、その不揮発性メモリから伝搬距離の最小値を読み出す。図6の3段目のグラフは、数1により伝搬距離から変換された水平距離(図5の水平距離125〜127)で表された路面形状データである。反射波のピーク141〜143は、最上段のグラフの反射波のピーク131〜133に対応し、距離センサ11から締結装置4c〜4eまでの水平距離と、電波を放射して締結装置4c〜4eによって反射された各反射波の信号レベルとを示す。図6の最下段のグラフは、車両10の移動に伴って反射波のピーク141〜143(それぞれ、参照番号144〜146で示す。)が変化する様子を示す。最下段のグラフもまた、3段目のグラフと同様に、水平距離で表された路面形状データを示す。伝搬距離は、車両10の移動に対して非線形に変化するが、水平距離は線形に変化する。従って、車両10が等速で移動する場合は、最下段のグラフに示すように反射波のピーク144〜146は直線になる。また、例えば、締結装置4c〜4eが地面1に等間隔で配置されている場合、伝搬距離121〜123は均等にはならないが、水平距離125〜127は均等になる。
【0026】
ステップS4において、水平距離を変数xとする前回の測定時間における路面形状データと現在の測定時間における路面形状データとの相互相関値R(x)を計算し、相互相関値R(x)を最大化する距離xを決定する。この距離xは、前回の測定時間と現在の測定時間との間に車両10が移動した距離を表す。図7は、異なる測定時間における路面形状データのピークの変化を示す図である。図7の上段のグラフは、前回の測定時間における路面形状データ(反射波のピーク151〜153を含む。)を示し、図7の下段のグラフは、現在の測定時間における路面形状データ(反射波のピーク154〜156を含む。)を示す。図7において、例えば、反射波のピーク151,154は同じ締結装置4cからの反射波のピークを示し、反射波のピーク152,155は同じ締結装置4dからの反射波のピークを示し、反射波のピーク153,156は同じ締結装置4eからの反射波のピークを示す。図7の場合では、反射波のピーク151,154間の水平距離、反射波のピーク152,155間の水平距離、反射波のピーク153,156間の水平距離が、前回の測定時間と現在の測定時間との間に移動した距離である。具体的には、次式に示す相互相関値R(x)を最大化する距離xを決定することにより、前回の測定時間と現在の測定時間との間に移動した距離を求める。
【0027】
【数2】
【0028】
ここで、A(m)は、前回の測定時間における、水平距離mで表された路面形状データであり、B(m)は、現在の測定時間における、水平距離mで表された路面形状データである。Mは水平距離の最大値である。
【0029】
ステップS5において、数2により決定された距離xを前回の測定時間と現在の測定時間との間の経過時間により除算して車両10の速度を計算する。なお、前回の測定時間と現在の測定時間との間の経過時間は、測定タイミング回路15の測定パルスの周期と同じである。ステップS6において、計算された速度に演算パルスの周期を乗算することにより演算パルスが入力されてからの走行距離を計算し、計算された走行距離を積算することで、基点(すなわち、コントローラ17から基点パルスが入力されたときの車両10の位置)からの積算走行距離を計算する。ステップS7において、速度及び積算走行距離を表示装置14に表示させ、ステップS1に戻る。
【0030】
車両10の速度は、加速または減速により変動する。このとき、反射波のピークは、図6の最下段のグラフのように直線にはならない。しかし、本発明の実施の形態によれば、
前回の測定時間と現在の測定時間との間に移動した距離から速度及び走行距離を計算し、計算された走行距離を積算するので、途中で速度が変動していても関係なく、速度を計算する2つの測定時間毎に移動する距離は確定している。つまり、車両10の速度の変動に関係なく、正確に積算走行距離を計算することができる。
【0031】
実施の形態1では、パルス波の送信信号を用いて、距離センサ11から軌道上の構造物までの伝搬距離を求めたが、FM−CW方式、スペクトル拡散方式、チャープパルス方式など、距離を測定できる他の方式を用いてもよい。
【0032】
ここで、図6の最上段のグラフに示すしきい値137について補足する。距離センサ11の電波の照射範囲101は、軌道の長手方向に対して横方向に多少は広がりを有する。そのため、距離センサ11は、レール3a,3bより外側の構造物からの反射波を受信することもある。レール3a,3bより外側の構造物の伝搬距離の変化は、見かけ上、車両10の速度より遅い。そのため、レール3a,3bより外側の構造物からの反射波に基づいて速度を計算すると、誤差が生じる。さいわい、レール3a,3bより外側の構造物は照射範囲101より外側にあるので、受信時の信号レベルは低い。よって、しきい値137を適切な値に設定し、そのような信号レベルが低い反射波に基づいて速度を計算しないようにしている。
【0033】
ところで、速度及び積算走行距離の誤差は、車体10の振動による高さ124のずれ、距離センサ11の受信雑音などがある。これらの誤差要因は、伝搬距離や水平距離の誤差として現れる。この誤差を低減するために、過去の数個の測定時間における路面形状データを使ってフィルタリングを行う。このフィルタリングにはカルマンフィルタが最適である。カルマンフィルタは、車両10の動特性を用いてフィルタリングすることができる。移動平均フィルタを用いた場合には、突発的なノイズに影響を受ける。しかし、カルマンフィルタを使用すると、車両10の動特性を越えるような突発的なノイズには影響を受けない。これらのことは一般的に知られたカルマンフィルタの特性であるが、本発明の実施の形態にとってカルマンフィルタが有利な点は以下にある。それは、いくつかの測定時間にわたる路面形状データのうちの両端の測定時間における路面形状データを使用できることということにある。速度及び積算走行距離の誤差を低減するためには、車両10が移動する距離をなるべく広い時間にわたって測定することが望ましい。移動平均フィルタを用いた場合には両端の測定時間における路面形状データに誤差が残るが、カルマンフィルタは両端の測定時間における路面形状データの誤差を取り除いてくれる。図9は、カルマンフィルタを用いたノイズ低減を説明するための図である。ここでは、路面形状データの1つの反射波のピークに対してカルマルフィルタを適用した場合を示す。参照番号161の線は、カルマンフィルタ処理前の反射波のピークが時間的に変化する様子を示す。これは、車両10が減速しているときの様子である。測定時間毎の反射波のピークを、反射波のピーク161の線上の丸印で示す。反射波のピーク161の水平距離の最大値及び最小値の差が、カルマンフィルタ処理前の変動幅162であるが、誤差を含んでいる。参照番号163の線は、カルマンフィルタ処理後の反射波のピークが時間的に変化する様子を示す。参照番号163の線では、両端の測定時間における路面形状データではノイズが抑圧され、カルマンフィルタ処理後の変動幅164によれば、誤差が低減していることがわかる。
【0034】
以上説明したように、本発明の実施の形態1によれば、地面1、枕木2a〜2e、締結装置4a〜4jなど、軌道上の構造物に電波を斜めから照射し、これらの構造物によって反射された各反射波の信号レベルと、距離センサ11からこれらの構造物までの伝搬距離とを含む路面形状データを取得し、水平距離で表された路面形状データを求め、その水平距離で表された路面形状データの時間的な変化から、少ない誤差で車両10の速度を計測することができ、さらに、少ない誤差で車両10の積算走行距離を計算することができる。本発明の実施の形態1によれば、車両10の速度が非常に低速であっても、正確に速度及び積算走行距離を求めることができる。
【0035】
また、本発明の実施の形態1によれば、レール3a,3bの長手方向に対して直交する偏波を有する電波を放射することで、レール3a,3bからの強い反射を抑えることができ、伝搬距離を確実に求めることができ、少ない誤差で車両10の速度を計測することができる。
【0036】
また、本発明の実施の形態1によれば、波長10〜30mmの電波を用いることで、締結装置4a〜4jで電波が強く反射し、伝搬距離を確実に求めることができ、少ない誤差で車両10の速度を計測することができる。
【0037】
ところで、車両10の速度を計測するとき、従来技術では、よくドップラー周波数が利用されている。しかし、本質的には、ドップラー速度計の電波を地面1に斜めから照射するとき、ドップラー速度計の遠方からの反射波と近傍からの反射波ではドップラー周波数が異なるので、反射波は複数の周波数成分が混じったドップラー信号となる。このようなドップラー信号は非常に複雑な波形を有し、このようなドップラー信号から速度を計算すると大きな誤差が生じるという問題がある。本発明の実施の形態1は、ドップラー周波数を一切利用せず、パルス波の電波を放射することで路面形状データを取得し、距離センサ11で取得した路面形状データの時間的な変化から車両10の速度を計算するので、少ない誤差で車両10の速度を計測することができ、さらに、少ない誤差で車両10の積算走行距離を計算することができる。
【0038】
実施の形態2.
図10は、本発明の実施の形態2に係る速度計測装置の距離センサの照射範囲101,102を示す、軌道の上面図である。軌道のカーブが非常に急峻な線区では誤差が増大する。レール3a,3b間の中央(すなわち、距離センサ11を設ける位置)と、レール3aの近傍の位置(すなわち、距離センサ11による電波の照射範囲101)では、円弧の長さが異なるためである。この問題に対処するために、2つの速度計測装置を車両に設け、一方の速度計測装置により、レール3aの近傍の照射範囲101に電波を放射し、他方の速度計測装置により、レール3bの近傍の照射範囲102に電波を放射し、2つの速度計測装置によってそれぞれ計測された速度の平均をとる。実施の形態2によれば、レール3a,3bのカーブが非常に急峻な線区であっても誤差を低減することができる。
【0039】
実施の形態3.
図11は、本発明の実施の形態3に係る電波反射体42を含む軌道の図である。軌道が道路41と交差する場合(踏切等)、道路41と交差している軌道の部分には枕木2及び締結装置を露出させることができないので、十分な路面形状データを取得することができない。実施の形態3では、道路41と交差している軌道の部分のレール3a,3b間において、レール3a,3bに沿って所定間隔で電波反射体42を並べている。実施の形態1では、通常の軌道上の構造物(例えば締結装置4a〜4e)に電波を放射していたが、実施の形態3では、電波を反射させるための電波反射体42を特に配置しておくものである。電波反射体42は、三角柱形のくぼみを持った金属などで構成できるが、その他、電波を強く反射させるものであれば任意の材料及び構造物を使用することができる。以上説明したように、実施の形態3によれば、踏み切りなどにおいて枕木や締結装置が見えない状態であっても、正確に車両の速度を計測することができる。
【0040】
実施の形態4.
図12は、本発明の実施の形態4に係る電波反射体54を含む軌道の図である。実施の形態1〜5では、距離センサを車両10の下面に設置し、路面に電波を照射して路面に対する車両10の速度を計測した。本発明の実施の形態の距離センサに求められる要件は、距離センサの進行方向と、距離センサにより電波が照射される面とが平行であればよい。従って、例えば、車両10の横に距離センサを設置し、さらに、車両10の横に車両10からそれぞれ等距離に位置するように、複数の電波反射体54を車両10の進行方向(軌道51,52の長手方向)に沿って周期的に並べて設置してもよい。電波反射体54は、三角柱形のくぼみを持った金属などで構成できるが、その他、電波を強く反射させるものであれば任意の材料及び構造物を使用することができる。電波反射体54は、支柱55の上に設けられてもよく、又は、トンネル53等の壁面に設けられてもよい。また、車両10の天井に距離センサを設置し、トンネル53の天井に複数の電波反射体54を車両10の進行方向に沿って周期的に並べて設置してもよい。
【0041】
実施の形態5.
図13は、本発明の実施の形態5に係るエレベータ装置の構成を示す概略図である。実施の形態1〜6では軌道上を走行する車両10を例にとったが、本発明の実施の形態は、軌道上を移動する移動体であるならば任意の装置に適用可能であり、図13に示すようにエレベータ装置に適用することもできる。図13のエレベータ装置は、壁面61及び周期的に設けられた複数の鉄骨62を含む昇降路(図示の簡単化のために1つ壁面のみを示す。)と、昇降路内をロープ64によって昇降するかご63とを備えて構成される。かご63は、実施の形態1等と同様に構成された速度計測装置を備え、その距離センサにより壁面61及び鉄骨62に電波を放射する(照射範囲103)。かご63の距離センサから電波を放射して壁面61及び鉄骨62によって反射された各反射波の信号レベルと、距離センサから壁面61及び鉄骨62までの伝搬距離とを測定することで、路面形状データを取得する。鉄骨62によって、反射波にピークが生じる。壁面61には、実施の形態3,4と同様に、電波を反射させるための電波反射体を特に配置してもよい。
【0042】
本発明の実施の形態は、軌道上を移動する移動体に限定されず、距離センサによって路面形状データを取得可能であるならば、任意の路面と任意の移動体に適用可能である。
【産業上の利用可能性】
【0043】
本発明によれば、路面に対する移動体の速度を正確に計測することができる速度計測装置を提供することができる。さらに、計測された速度を積算することにより、所定の基準点からの積算走行距離を計算することができる。さらに、移動する経路が予めわかってい
【0044】
電波を放射して路面上の構造物から反射される反射波から路面形状データを取得し、取得される路面形状データの時間的な変化から車両の移動距離を計測するので、移動体の速度を正確に計測することができる。また、車両の速度が非常に低速であっても、正確に速度を求められる。
【0045】
レールの枕木や締結装置に電波を照射し、枕木や締結装置からの強い反射波を受信することで、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
【0046】
レールの長手方向に対して直交する偏波を有する電波を放射することで、レールからの強い反射を抑えることができ、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
【0047】
波長10〜30mmの電波を用いることで、締結装置で電波が強く反射し、移動体の速度を確実に求めることができ、少ない誤差で移動体の速度を計測することができる。
る場合には、計算された積算走行距離から現在位置を特定することもできる。
【符号の説明】
【0048】
1 地面、2,2a〜2e 枕木、3a,3b レール、4a〜4j 締結装置、5 路面、10 車両、11 距離センサ、12 メモリ、13 演算装置、14 表示装置、15 測定タイミング回路、16 演算タイミング回路、17 コントローラ、21 距離センサコントローラ、22 フィルタ、23,26 増幅器、24 送信アンテナ、25 受信アンテナ、27 包絡線検波器、28 AD変換器、29 クロック発振器、41 道路、42 電波反射体、51,52 軌道、53 トンネル、54 電波反射体、55 支柱、61 壁面、62 鉄骨、63 かご、64 ロープ、101〜103 電波の照射範囲、111 距離センサコントローラ21によって発生される矩形波の送信信号の波形、112 フィルタ22を通過後の送信信号の波形、113 包絡線検波器27による検波後の受信信号の波形、114 遅延時間、121〜123 伝搬距離、124 路面5から車両10までの高さ、125〜127 水平距離、131〜136 反射波のピーク、141〜146 反射波のピーク、151〜156 反射波のピーク、161 カルマンフィルタ処理前の反射波のピーク、162 カルマンフィルタ処理前の変動幅、163 カルマンフィルタ処理後の反射波のピーク、164 カルマンフィルタ処理後の変動幅。
【特許請求の範囲】
【請求項1】
路面に対する移動体の速度を計測する速度計測装置であって、上記速度計測装置は、
上記移動体に設けられ、上記路面断面の上部形状を表す路面形状データを取得する路面形状センサと、
上記路面形状センサによって取得された路面形状データを格納するメモリと、
上記メモリに格納された上記第1及び第2の路面形状データに基づいて、上記移動体の速度を計算する演算手段とを備え、
上記路面形状センサは、上記路面に電波を放射し、上記路面形状センサからの距離が異なる上記路面上の複数の構造物によって反射された各反射波の信号レベルと、上記路面形状センサから上記各構造物までの伝搬距離とを測定することで、上記路面形状データを取得し、上記路面形状センサは、少なくとも第1及び第2の測定時間を含む複数の測定時間において上記路面形状データを取得し、上記第1の測定時間において第1の路面形状データを取得し、上記第2の測定時間において第2の路面形状データを取得し、
上記演算手段は、上記第1及び第2の路面形状データのそれぞれの伝搬距離を、上記路面に射影した水平距離に変換し、上記第1の路面形状データと類似する上記第2の路面形状データが取得されるときの上記第1の路面形状データと上記第2の路面形状データとの水平距離の差を決定し、上記水平距離の差を上記第1及び第2の測定時間の差で除算して上記移動体の速度を計算することを特徴とする速度計測装置。
【請求項2】
上記演算手段は、複数の測定時間における路面形状データに対してカルマンフィルタを適用することを特徴とする請求項1記載の速度計測装置。
【請求項3】
上記路面は、枕木及び締結装置を含む鉄道線路であることを特徴とする請求項1〜2のうちのいずれか1つに記載の速度計測装置。
【請求項4】
上記路面は、レールを含む鉄道線路であり、上記路面形状センサは、上記レールの長手方向に対して直交する偏波を有する電波を放射することを特徴とする請求項1〜3のうちのいずれか1つに記載の速度計測装置。
【請求項5】
上記路面形状センサは、波長10〜30mmを有する電波を放射することを特徴とする請求項1〜4のうちのいずれか1つに記載の速度計測装置。
【請求項6】
上記演算手段は、上記計算された速度に基づいて所定時間の走行距離を計算し、上記計算された走行距離を積算することにより、所定の基準点からの上記移動体の積算走行距離を計算することを特徴とする請求項1〜5のうちのいずれか1つに記載の速度計測装置。
【請求項1】
路面に対する移動体の速度を計測する速度計測装置であって、上記速度計測装置は、
上記移動体に設けられ、上記路面断面の上部形状を表す路面形状データを取得する路面形状センサと、
上記路面形状センサによって取得された路面形状データを格納するメモリと、
上記メモリに格納された上記第1及び第2の路面形状データに基づいて、上記移動体の速度を計算する演算手段とを備え、
上記路面形状センサは、上記路面に電波を放射し、上記路面形状センサからの距離が異なる上記路面上の複数の構造物によって反射された各反射波の信号レベルと、上記路面形状センサから上記各構造物までの伝搬距離とを測定することで、上記路面形状データを取得し、上記路面形状センサは、少なくとも第1及び第2の測定時間を含む複数の測定時間において上記路面形状データを取得し、上記第1の測定時間において第1の路面形状データを取得し、上記第2の測定時間において第2の路面形状データを取得し、
上記演算手段は、上記第1及び第2の路面形状データのそれぞれの伝搬距離を、上記路面に射影した水平距離に変換し、上記第1の路面形状データと類似する上記第2の路面形状データが取得されるときの上記第1の路面形状データと上記第2の路面形状データとの水平距離の差を決定し、上記水平距離の差を上記第1及び第2の測定時間の差で除算して上記移動体の速度を計算することを特徴とする速度計測装置。
【請求項2】
上記演算手段は、複数の測定時間における路面形状データに対してカルマンフィルタを適用することを特徴とする請求項1記載の速度計測装置。
【請求項3】
上記路面は、枕木及び締結装置を含む鉄道線路であることを特徴とする請求項1〜2のうちのいずれか1つに記載の速度計測装置。
【請求項4】
上記路面は、レールを含む鉄道線路であり、上記路面形状センサは、上記レールの長手方向に対して直交する偏波を有する電波を放射することを特徴とする請求項1〜3のうちのいずれか1つに記載の速度計測装置。
【請求項5】
上記路面形状センサは、波長10〜30mmを有する電波を放射することを特徴とする請求項1〜4のうちのいずれか1つに記載の速度計測装置。
【請求項6】
上記演算手段は、上記計算された速度に基づいて所定時間の走行距離を計算し、上記計算された走行距離を積算することにより、所定の基準点からの上記移動体の積算走行距離を計算することを特徴とする請求項1〜5のうちのいずれか1つに記載の速度計測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−112794(P2012−112794A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−261920(P2010−261920)
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]