
速度超過警告装置
【課題】運転者の煩わしさを低減する。
【解決手段】車両が警告を必要としない特定の状況にあるか否かを判定し(S114、S116、S118、S120)、車両の速度が警告速度を超過していると判定された場合であっても、車両が合流状態、追越状態、交通流走行状態といった特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させる(S200、S300、S400、S500、S600)。
【解決手段】車両が警告を必要としない特定の状況にあるか否かを判定し(S114、S116、S118、S120)、車両の速度が警告速度を超過していると判定された場合であっても、車両が合流状態、追越状態、交通流走行状態といった特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させる(S200、S300、S400、S500、S600)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の速度を検出して警告速度を超過していることを判定すると、警告音をスピーカから出力させて警告する速度超過警告装置に関するものである。
【背景技術】
【0002】
従来、速度検出器を用いて車両の走行速度を検出し、検出された走行速度が記憶装置に記憶された設定速度を超過すると、予め定められた警告音で運転者に警告を行う速度超過警告装置がある。
【0003】
また、速度検出器を用いて車両の走行速度を検出し、検出された走行速度が記憶装置に記憶された設定速度を超過すると、振動子を振動させて運転者に速度超過を警告する速度超過警告装置がある(例えば、特許文献1参照)。
【特許文献1】特開平8−161667号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記した各装置は、検出された走行速度が記憶装置に記憶された設定速度を超過すると、警告を必要としない状況であると運転者が感じても、予め定められた警告方法で警告が行われる。従って、例えば、低速走行中の前方車両を追い越すために一時的に加速するような状況でも、走行速度が設定速度を超過すると予め定められた警告方法で警告が行われる。このため、運転者に煩わしさを感じさせてしまうといった問題がある。
【0005】
本発明は上記問題に鑑みたもので、運転者の煩わしさを低減することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、合流状況判定手段により車両が合流車線から本線に進入する状況であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0007】
このような構成によれば、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、合流状況判定手段により車両が合流車線から本線に進入する状況であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。ここで、第1の警告音よりも警告の度合いの低い第2の警告音は、第1の警告音よりも音量の小さな警告音、第1の警告音よりも鳴動間隔の長い警告音、第1の警告音よりも音量が小さく、かつ、鳴動間隔の長い警告音のいずれかである。なお、第1の警告音よりも音量の小さな警告音には音量がゼロである無音も含まれる。
【0008】
また、上記目的を達成するため、請求項2に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および車両前方の撮影画像に基づいて車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、追越状態判定手段により車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0009】
このような構成によれば、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および車両前方の撮影画像に基づいて車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、追越状態判定手段により車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0010】
また、上記目的を達成するため、請求項3に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、交通流走行状態判定手段により車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0011】
このような構成によれば、前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、交通流走行状態判定手段により車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0012】
また、上記目的を達成するため、請求項4に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、警告音出力手段は、第1の警告音をスピーカから出力させた後、生体変化判定手段により運転者の生体的特性の変化量が閾値よりも大きいと判定された場合、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0013】
このような構成によれば、運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、第1の警告音をスピーカから出力させた後、生体変化判定手段により運転者の生体的特性の変化量が閾値よりも大きいと判定された場合、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0014】
また、請求項5に記載の発明は、警告音出力手段により第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続しているか否かを判定する判定手段と、判定手段により第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合、第1の警告音をスピーカから出力させるように変更する警告音変更手段と、を備えたことを特徴としている。
【0015】
このように、第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合、第1の警告音をスピーカから出力させるように変更することができる。
【発明を実施するための最良の形態】
【0016】
(第1実施形態)
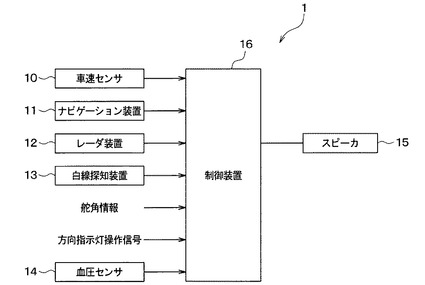
本発明の一実施形態に係る速度超過警告装置のブロック構成を図1に示す。本速度超過警告装置1は、車速センサ10、ナビゲーション装置11、レーダ装置12、白線検知装置13、血圧センサ14、スピーカ15および制御装置16を備えている。
【0017】
車速センサ10は、車両の速度に応じた車速信号を出力する。
【0018】
ナビゲーション装置11は、現在位置を特定するための信号を出力する位置検出器、地図データを入力するための地図データ入力器、液晶等のディスプレイに映像を表示する表示装置、各種制御を行う制御装置等(いずれも図示せず)を備えている。なお、制御装置の処理には、位置検出器から入力される信号に基づいて車両の現在位置を特定する現在位置特定処理、自車位置周辺の地図上に自車位置マークを重ねて表示する地図表示処理、地図データに基づいて走行道路の道路形状、道路種別、制限速度を特定する走行道路情報特定処理、目的地に至る案内経路を探索して経路探索を行う経路案内処理等がある。
【0019】
レーダ装置12は、車両前方へパルス状のレーザ光を送出するレーザ素子と、車両前方に存在する物体に反射した反射光を受光する受光素子(いずれも図示せず)を備え、レーザ素子にレーザ光を送出させてから受光素子により反射光が受光されるまでの時間差から前方車両の有無を検出するとともに前方車両との距離を測定する。
【0020】
白線検知装置13は、車両前方を撮影するカメラを有し、このカメラの撮影画像に画像認識処理を施して走行道路の路面に描かれた白線の検知を行う。
【0021】
血圧センサ14は、運転者の血圧を測定するもので、運転者の血圧に応じた信号を周期的に制御装置16へ出力する。
【0022】
スピーカ15は、制御装置16から入力される音声信号に応じた音声案内や警告音を出力する。
【0023】
制御装置16には、ハンドルの回転に応じた舵角情報および運転者の右左折レバー操作に応じたウィンカ操作信号(以下、方向指示灯操作信号と記す)が入力されるようになっている。
【0024】
制御装置16は、CPU、メモリ、I/O等を備えたコンピュータとして構成されており、CPUはメモリに記憶されたプログラムに従って各種処理を実施する。
【0025】
制御装置16の処理としては、車速センサ10より入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する処理、ナビゲーション装置11、レーダ装置12および白線検知装置13から車両周辺の状況を特定するための各種情報を取得する処理、血圧センサ14より入力される信号に基づいて運転者の血圧の変化量が予め定められた閾値よりも大きいか否かを判定する処理等がある。
【0026】
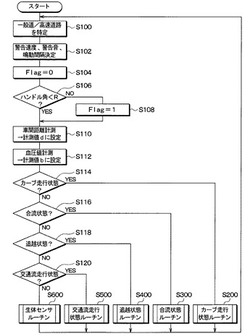
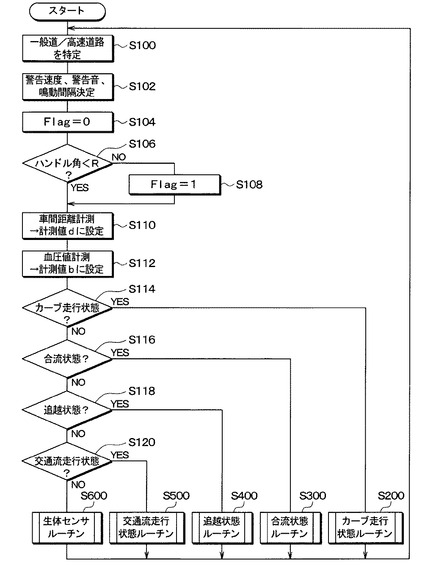
図2に、制御装置16のフローチャートを示す。車両のイグニッションスイッチがオン状態になると、本速度超過警告装置1は動作状態となり、制御装置16は、図2に示す処理を開始する。
【0027】
まず、走行道路の道路種別が一般道であるか高速道路であるかを特定する(S100)。具体的には、ナビゲーション装置11より走行道路の道路種別を示す情報を取得して走行道路の道路種別が一般道であるか高速道路であるかを特定する。
【0028】
次に、警告速度とともに第1の警告音に相当する警告音の音種、音量、鳴動間隔を決定する(S102)。警告速度は、走行道路の道路種別に応じて決定する。なお、本実施形態では、「ピンポン、ピンポン、・・・」といった音種とし、音量は10段階分の5段階、鳴動間隔は2秒に決定するものとする。
【0029】
次に、ハンドル角の変化量が予め定められた閾値R以上であることを示すハンドル角フラグFlagの初期設定を行う(S104)。具体的には、ハンドル角フラグFlagを0に設定する。
【0030】
次に、舵角情報よりハンドル角の変化量を特定し、ハンドル角の変化量が閾値Rよりも小さいか否かを判定する(S106)。
【0031】
ここで、ハンドル角が閾値R以上の場合には、ハンドル角フラグFlagを1に設定して(S108)、S110へ進み、ハンドル角が閾値Rよりも小さい場合には、ハンドル角フラグFlagを1に設定することなく、S110へ進む。
【0032】
S110では、前方車両との車間距離を計測する。具体的には、レーダ装置12を用いて前方車両との車間距離を計測するとともに計測値dをメモリに記憶させる。
【0033】
次に、運転者の血圧値を計測する(S112)。具体的には、血圧センサ14を用いて運転者の血圧を計測するとともに計測値bをメモリに記憶させる。
【0034】
S114では、車両がカーブ走行状態であるか否かを判定する。この判定は、次の(1−1)の条件を満たすか否かに基づいて行う。
【0035】
(1−1)ハンドル角フラグFlagが1に設定されていることを判定した場合
つまり、(1−1)に示した条件を満たす場合、車両がカーブ走行状態であると判定する。
【0036】
次のS116では、車両が合流車線から本線に進入する合流状態であるか否かを判定する。この判定は、次の(2−1)〜(2−3)の条件を満たすか否かに基づいて行う。
【0037】
(2−1)運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいと判定した場合
(2−2)運転者による方向指示灯の点滅操作があると判定した場合
(2−3)白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだことを判定した場合
つまり、(2−1)〜(2−3)の全ての条件を満たす場合、車両が合流状態であると判定する。
【0038】
次のS118では、車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する。この判定は、次の(3−1)〜(3−4)の全ての条件を満たすか否かに基づいて行う。
【0039】
(3−1)レーダ装置12により前方車両が検出されたことを判定した場合
(3−2)運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいと判定した場合
(3−3)運転者による方向指示灯の点滅操作があると判定した場合
(3−4)白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだことを判定した場合
つまり、(3−1)〜(3−4)の全ての条件を満たす場合、車両が走行車線を変更して前方車両を追い越す追越状態であると判定する。
【0040】
次のS120では、車両が交通流走行状態であるか否かを判定する。この判定は、次の(4−1)を満たすか否かに基づいて行う。
【0041】
(4−1)レーダ装置12を用いて前方車両との距離Dを計測し、この計測した計測値DとS110にてメモリに記憶された計測値dの変化量(D−d)の大きさが予め定められた閾値よりも短いと判定した場合
つまり、(4−1)に示した条件を満たす場合、車両が交通流走行状態であると判定する。
【0042】
ここで、車両がカーブ走行状態でもなく、合流状態でもなく、追越状態でもなく、交通流走行状態でもない場合、S114〜S120の判定はNOとなり、次に、S600の生体センサルーチンを実施する。
【0043】
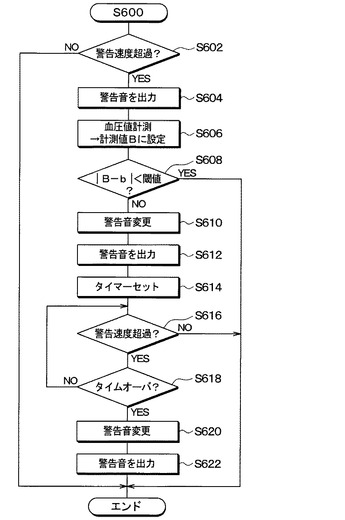
図3に、S600の生体センサルーチンのフローチャートを示す。この生体センサルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S602)。
【0044】
車速が警告速度以下の場合、S602の判定はNOとなり、本処理を終了する。
【0045】
また、車両の速度が警告速度を超過している場合、S602の判定はYESとなり、次に、S102にて決定した警告音の種類、音量、鳴動間隔に従い、第1の警告音をスピーカ15から出力させる(S604)。
【0046】
次に、運転者の血圧値を計測する(S606)。具体的には、血圧センサ14を用いて運転者の血圧を計測するとともに計測値Bをメモリに記憶させる。
【0047】
次に、メモリを参照して、S606にてメモリに記憶された血圧値Bと、S112にてメモリに記憶された血圧値bとの変化量(B−b)の大きさが予め定められた閾値よりも小さいか否かを判定する(S608)。すなわち、運転者の血圧値の変化量が閾値未満であるか否かを判定する。
【0048】
ここで、運転者の血圧値の変化量(B−b)の大きさが閾値未満となっている場合には、S608の判定はYESとなり、本処理を終了する。
【0049】
また、S604にて出力した警告音に反応し、運転者の血圧値の変化量が閾値以上になると、S608の判定はNOとなり、第1の警告音よりも警告の度合いの低い第2の警告音に変更する(S610)。本実施形態では、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0050】
そして、第2の警告音をスピーカ15から出力させる(S612)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0051】
このように、第1の警告音をスピーカ15から出力させた後、運転者の血圧値の変化量(B−b)の大きさが予め定められた閾値以上になった場合には、運転者が警告音を認識したものとして、警告音を出力しないようになっている。
【0052】
次に、計時用のタイマーをセットして計時を開始し(S614)、再度、車両の速度が警告速度を超過しているか否かを判定する(S616)。
【0053】
ここで、車速が警告速度以下となった場合、S616の判定はNOとなり、本処理を終了する。
【0054】
また、車両の速度が警告速度を超過している場合には、S616の判定はYESとなり、次に、タイマーのカウント値に基づいてタイムオーバを判定する(S618)。具体的には、タイマーにより予め定められた基準時間(例えば、10秒)が経過したか否かを判定する
タイマーにより予め定められた基準時間が経過していない場合、S618の判定はNOとなり、S616の判定を繰り返す。
【0055】
また、車両の速度が警告速度を超過しており、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更し(S620)、第1の警告音をスピーカ15から出力させる(S622)。
【0056】
このように、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させるようになっている。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0057】
このS600の生体センサルーチンが終了すると、図2のS100へ戻る。
【0058】
図2の説明に戻り、車両がカーブへ進入し、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値R以上になると、S106の判定はNOとなり、S108にてハンドル角フラグFlagが1に設定される。
【0059】
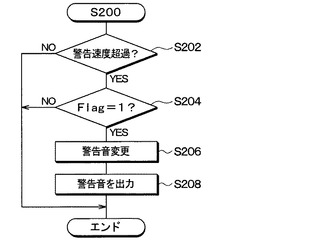
そして、車両がカーブへ進入し、S114にて車両がカーブを走行中であると判定されると、次に、S200のカーブ走行状態ルーチンを実施する。
【0060】
図4に、S200のカーブ走行状態ルーチンのフローチャートを示す。このカーブ走行状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S202)。
【0061】
車速が警告速度以下の場合、S202の判定はNOとなり、本処理を終了する。
【0062】
また、車速が警告速度を超過している場合、次に、ハンドル角フラグFlagが0に設定されているかを判定する(S204)。
【0063】
したがって、車速が警告速度を超過しており、かつ、ハンドル角フラグFlagが1に設定されている場合、S202、S204の判定はそれぞれYESとなり、警告音の設定を第1の警告音から第2の警告音に変更する(S206)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0064】
そして、第2の警告音をスピーカ15から出力させる(S208)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0065】
上記したように、車両が速度超過の状態でカーブを走行する場合には、警告音が出力されないようになっている。
【0066】
このS200のカーブ走行ルーチンが終了すると、図2のS100へ戻る。
【0067】
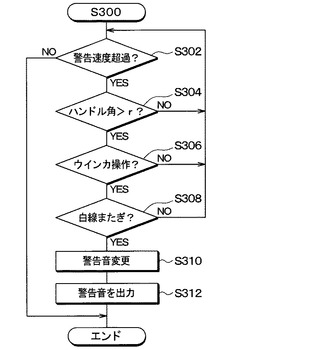
図2の説明に戻り、車両が合流車線から本線に進入する合流地点に進入し、車両が合流状態であると判定されると、S300の合流状態ルーチンを実施する。
【0068】
図5に、S300の合流状態ルーチンのフローチャートを示す。この合流状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S302)。
【0069】
ここで、車両の速度が警告速度を超過していない場合、S302の判定はNOとなり、本処理を終了する。
【0070】
また、車両の速度が警告速度を超過している場合、S302の判定はYESとなり、S304へ進む。
【0071】
S304では、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいか否か判定する。
【0072】
S306では、運転者による方向指示灯の点滅操作があるか否かを判定する。
【0073】
S308では、白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだか否かを判定する。
【0074】
ここで、車両が合流車線から本線に進入しようとして、S304〜S308の各判定がYESとなると、警告音の設定を第1の警告音から第2の警告音に変更する(S310)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0075】
そして、第2の警告音をスピーカ15から出力させ(S312)、図2のS100へ戻る。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0076】
なお、S304〜S308のいずれかの判定がNOとなった場合、警告音を出力することなくS302へ戻る。
【0077】
上記したように、車両が速度超過の状態で車両が合流車線から本線に進入しようとする場合には、車両の速度が警告速度を超過していても警告音が出力されないようになっている。
【0078】
このS300の合流状態ルーチンが終了すると、図2のS100へ戻る。
【0079】
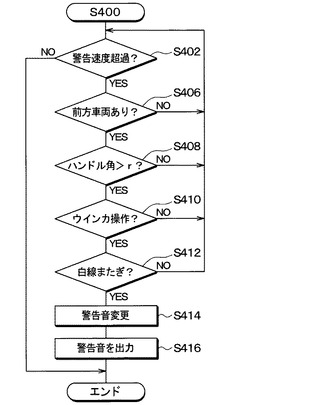
図2の説明に戻り、車両が走行車線を変更して前方車両を追い越そうとすると、車両が追い越し状態であると判定され、S400の追越状態ルーチンを実施する。
【0080】
図6に、S400の追越状態ルーチンのフローチャートを示す。この追越状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S402)。
【0081】
ここで、車両の速度が警告速度を超過していない場合、S402の判定はNOとなり、本処理を終了する。
【0082】
また、車両の速度が警告速度を超過している場合、S402の判定はYESとなり、S406へ進む。
【0083】
S406では、レーダ装置12により前方車両が検出されたか否かに基づいて前方車両があるか否かを判定する。
【0084】
S408では、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいか否か判定する。
【0085】
S410では、運転者による方向指示灯の点滅操作があるか否かを判定する。
【0086】
S412では、白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだか否かを判定する。
【0087】
ここで、車両が走行車線を変更し、前方車両を追い越そうとして、S406〜S412の各判定がYESとなると、警告音の設定を第1の警告音から第2の警告音に変更する(S414)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0088】
そして、第2の警告音をスピーカ15から出力させ(S416)、図2のS100へ戻る。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0089】
なお、S406〜S412のいずれかの判定がNOとなった場合、警告音を出力することなくS402へ戻る。
【0090】
上記したように、車両が走行車線を変更し、前方車両を追い越そうとする場合には、車両の速度が警告速度を超過していても警告音が出力されないようになっている。
【0091】
このS400の追越状態ルーチンが終了すると、図2のS100へ戻る。
【0092】
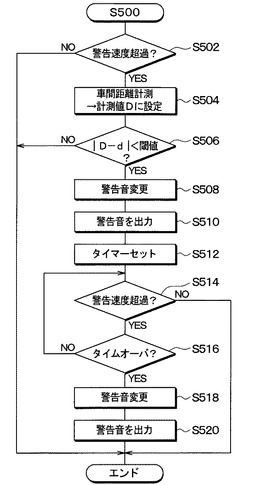
図2の説明に戻り、車両が前方車両のアクセル操作やブレーキ操作に合わせて前方車両の後方を走行している場合、車両が交通流走行状態であると判定され、S500の交通流走行状態ルーチンを実施する。
【0093】
図7に、S500の交通流走行状態ルーチンのフローチャートを示す。この交通流走行状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S502)。
【0094】
ここで、車両の速度が警告速度を超過していない場合、S502の判定はNOとなり、本処理を終了する。
【0095】
また、車両の速度が警告速度を超過している場合、S502の判定はYESとなり、S504へ進む。
【0096】
S504では、前方車両との距離を計測する。具体的には、レーダ装置12を用いて前方車両との距離を計測するとともに計測値Dをメモリに記憶させる。
【0097】
次に、メモリを参照して、S504にてメモリに記憶された計測値Dと、S110にてメモリに記憶された計測値dの変化量(D−d)の大きさが予め定められた閾値よりも短いか否かを判定する(S506)。
【0098】
ここで、前方車両との距離の変化量(D−d)の大きさが閾値以上となった場合には、S506の判定はNOとなり、本処理を終了する。
【0099】
また、前方車両との距離の変化量(D−d)の大きさが閾値未満となっている場合、S506の判定はYESとなり、警告音を第2の警告音に変更する(S508)。本実施形態では、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0100】
そして、第2の警告音をスピーカ15から出力させる(S510)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0101】
次に、計時用のタイマーをセットして計時を開始し(S512)、再度、車両の速度が警告速度を超過しているか否かを判定する(S514)。
【0102】
ここで、車速が警告速度以下となった場合、S514の判定はNOとなり、本処理を終了する。
【0103】
また、車両の速度が警告速度を超過している場合には、S514の判定はYESとなり、次に、タイマーのカウント値に基づいてタイムオーバを判定する(S516)。具体的には、タイマーにより予め定められた基準時間(例えば、10秒)が経過したか否かを判定する
タイマーにより予め定められた基準時間が経過していない場合、S516の判定はNOとなり、S516の判定を繰り返す。
【0104】
また、車両の速度が警告速度を超過しており、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更し(S518)、第1の警告音
をスピーカ15から出力させる(S520)。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0105】
このように、警告音を第2の警告音に変更した後、車両の速度が警告速度を超過していると判定され、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更するようになっている。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0106】
上記した構成によれば、車両の速度が警告速度を超過していると判定された場合であっても、車両がカーブ走行状態にあると判定した場合、車両が合流車線から本線に進入する合流状態であると判定した場合、車両が走行車線を変更して前方車両を追い越す追越状態であると判定した場合、車両が交通流走行状態であると判定した場合といった、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0107】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0108】
例えば、上記実施形態では、車両がカーブ走行状態であると判定された場合、車両が合流状態であると判定された場合、車両が追越状態であると判定された場合、車両が交通流走行状態であると判定された場合、それぞれ警告音が無音となるように構成したものを示したが、例えば、第1の警告音よりも音量の小さな警告音を出力するようにしてもよく、第1の警告音よりも鳴動間隔の長い警告音を出力するようにしてもよく、第1の警告音よりも音量が小さく、かつ、鳴動間隔の長い警告音を出力するようにしてもよい。要するに第1の警告音よりも警告の度合いの低い警告音を出力するように構成すればよい。
【0109】
また、上記実施形態では、血圧センサを用いて運転者の血圧値を計測し、S608にて運転者の血圧値の変化量が予め定められた閾値よりも大きいか否かを判定したが、例えば、運転者の脈拍を検出する脈拍センサを備え、脈拍センサを用いて運転者の脈拍値を計測し、運転者の脈拍の変化量が予め定められた閾値よりも大きいか否かを判定するようにしてもよい。
【0110】
また、上記実施形態では、運転者のハンドル操作に応じて変化する舵角情報に基づいて車両がカーブ走行状態であるか否かを判定したが、例えば、ナビゲーション装置11から走行道路の道路形状を取得して車両がカーブ走行状態であるか否かを判定するようにしてもよい。
【0111】
また、上記実施形態では、生体センサルーチンS600および交通流走行状態ルーチンS500において、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させる例を示したが、このような状況に限定されるものではなく、例えば、カーブ走行状態ルーチンS200、合流状態ルーチンS300、追越状態ルーチンS400においても、同様に、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させるようにしてもよい。
【0112】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、S602、S202、S302、S402、S502が速度超過判定手段に相当し、S604、S610、S612、S206、S208、S310、S312、S414、S416、S508、S510が警告音出力手段に相当し、S114、S116、S118、S120が特定状況判定手段に相当し、S114がカーブ走行判定手段に相当し、S116が合流状況判定手段に相当し、S118が追越状態判定手段に相当し、S120が交通流走行状態に相当し、S608が生体変化判定手段に相当し、S616、S618が判定手段に相当し、S620、S622、S518、S520が警告音変更手段に相当する。
【図面の簡単な説明】
【0113】
【図1】本発明の一実施形態に係る速度超過警告装置のブロック構成を示す図である。
【図2】制御装置のフローチャートである。
【図3】生体センサルーチンのフローチャートである。
【図4】カーブ走行状態ルーチンのフローチャートである。
【図5】合流状態ルーチンのフローチャートである。
【図6】追越状態ルーチンのフローチャートである。
【図7】交通流走行状態ルーチンのフローチャートである。
【符号の説明】
【0114】
1 速度超過警告装置
10 車速センサ
11 ナビゲーション装置
12 レーダ装置
13 白線検知装置
14 血圧センサ
15 スピーカ
16 制御装置
【技術分野】
【0001】
本発明は、車両の速度を検出して警告速度を超過していることを判定すると、警告音をスピーカから出力させて警告する速度超過警告装置に関するものである。
【背景技術】
【0002】
従来、速度検出器を用いて車両の走行速度を検出し、検出された走行速度が記憶装置に記憶された設定速度を超過すると、予め定められた警告音で運転者に警告を行う速度超過警告装置がある。
【0003】
また、速度検出器を用いて車両の走行速度を検出し、検出された走行速度が記憶装置に記憶された設定速度を超過すると、振動子を振動させて運転者に速度超過を警告する速度超過警告装置がある(例えば、特許文献1参照)。
【特許文献1】特開平8−161667号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記した各装置は、検出された走行速度が記憶装置に記憶された設定速度を超過すると、警告を必要としない状況であると運転者が感じても、予め定められた警告方法で警告が行われる。従って、例えば、低速走行中の前方車両を追い越すために一時的に加速するような状況でも、走行速度が設定速度を超過すると予め定められた警告方法で警告が行われる。このため、運転者に煩わしさを感じさせてしまうといった問題がある。
【0005】
本発明は上記問題に鑑みたもので、運転者の煩わしさを低減することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、合流状況判定手段により車両が合流車線から本線に進入する状況であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0007】
このような構成によれば、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、合流状況判定手段により車両が合流車線から本線に進入する状況であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。ここで、第1の警告音よりも警告の度合いの低い第2の警告音は、第1の警告音よりも音量の小さな警告音、第1の警告音よりも鳴動間隔の長い警告音、第1の警告音よりも音量が小さく、かつ、鳴動間隔の長い警告音のいずれかである。なお、第1の警告音よりも音量の小さな警告音には音量がゼロである無音も含まれる。
【0008】
また、上記目的を達成するため、請求項2に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および車両前方の撮影画像に基づいて車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、追越状態判定手段により車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0009】
このような構成によれば、運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および車両前方の撮影画像に基づいて車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、追越状態判定手段により車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0010】
また、上記目的を達成するため、請求項3に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、交通流走行状態判定手段により車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、警告音出力手段は、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合であっても、特定状況判定手段により車両が特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0011】
このような構成によれば、前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、交通流走行状態判定手段により車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、車両が警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、車両の速度が警告速度を超過していると判定された場合であっても、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0012】
また、上記目的を達成するため、請求項4に記載の発明は、車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、速度超過判定手段により車両の速度が警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、警告音出力手段は、第1の警告音をスピーカから出力させた後、生体変化判定手段により運転者の生体的特性の変化量が閾値よりも大きいと判定された場合、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させることを特徴としている。
【0013】
このような構成によれば、運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、第1の警告音をスピーカから出力させた後、生体変化判定手段により運転者の生体的特性の変化量が閾値よりも大きいと判定された場合、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0014】
また、請求項5に記載の発明は、警告音出力手段により第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続しているか否かを判定する判定手段と、判定手段により第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合、第1の警告音をスピーカから出力させるように変更する警告音変更手段と、を備えたことを特徴としている。
【0015】
このように、第2の警告音がスピーカから出力されるようになった後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合、第1の警告音をスピーカから出力させるように変更することができる。
【発明を実施するための最良の形態】
【0016】
(第1実施形態)
本発明の一実施形態に係る速度超過警告装置のブロック構成を図1に示す。本速度超過警告装置1は、車速センサ10、ナビゲーション装置11、レーダ装置12、白線検知装置13、血圧センサ14、スピーカ15および制御装置16を備えている。
【0017】
車速センサ10は、車両の速度に応じた車速信号を出力する。
【0018】
ナビゲーション装置11は、現在位置を特定するための信号を出力する位置検出器、地図データを入力するための地図データ入力器、液晶等のディスプレイに映像を表示する表示装置、各種制御を行う制御装置等(いずれも図示せず)を備えている。なお、制御装置の処理には、位置検出器から入力される信号に基づいて車両の現在位置を特定する現在位置特定処理、自車位置周辺の地図上に自車位置マークを重ねて表示する地図表示処理、地図データに基づいて走行道路の道路形状、道路種別、制限速度を特定する走行道路情報特定処理、目的地に至る案内経路を探索して経路探索を行う経路案内処理等がある。
【0019】
レーダ装置12は、車両前方へパルス状のレーザ光を送出するレーザ素子と、車両前方に存在する物体に反射した反射光を受光する受光素子(いずれも図示せず)を備え、レーザ素子にレーザ光を送出させてから受光素子により反射光が受光されるまでの時間差から前方車両の有無を検出するとともに前方車両との距離を測定する。
【0020】
白線検知装置13は、車両前方を撮影するカメラを有し、このカメラの撮影画像に画像認識処理を施して走行道路の路面に描かれた白線の検知を行う。
【0021】
血圧センサ14は、運転者の血圧を測定するもので、運転者の血圧に応じた信号を周期的に制御装置16へ出力する。
【0022】
スピーカ15は、制御装置16から入力される音声信号に応じた音声案内や警告音を出力する。
【0023】
制御装置16には、ハンドルの回転に応じた舵角情報および運転者の右左折レバー操作に応じたウィンカ操作信号(以下、方向指示灯操作信号と記す)が入力されるようになっている。
【0024】
制御装置16は、CPU、メモリ、I/O等を備えたコンピュータとして構成されており、CPUはメモリに記憶されたプログラムに従って各種処理を実施する。
【0025】
制御装置16の処理としては、車速センサ10より入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する処理、ナビゲーション装置11、レーダ装置12および白線検知装置13から車両周辺の状況を特定するための各種情報を取得する処理、血圧センサ14より入力される信号に基づいて運転者の血圧の変化量が予め定められた閾値よりも大きいか否かを判定する処理等がある。
【0026】
図2に、制御装置16のフローチャートを示す。車両のイグニッションスイッチがオン状態になると、本速度超過警告装置1は動作状態となり、制御装置16は、図2に示す処理を開始する。
【0027】
まず、走行道路の道路種別が一般道であるか高速道路であるかを特定する(S100)。具体的には、ナビゲーション装置11より走行道路の道路種別を示す情報を取得して走行道路の道路種別が一般道であるか高速道路であるかを特定する。
【0028】
次に、警告速度とともに第1の警告音に相当する警告音の音種、音量、鳴動間隔を決定する(S102)。警告速度は、走行道路の道路種別に応じて決定する。なお、本実施形態では、「ピンポン、ピンポン、・・・」といった音種とし、音量は10段階分の5段階、鳴動間隔は2秒に決定するものとする。
【0029】
次に、ハンドル角の変化量が予め定められた閾値R以上であることを示すハンドル角フラグFlagの初期設定を行う(S104)。具体的には、ハンドル角フラグFlagを0に設定する。
【0030】
次に、舵角情報よりハンドル角の変化量を特定し、ハンドル角の変化量が閾値Rよりも小さいか否かを判定する(S106)。
【0031】
ここで、ハンドル角が閾値R以上の場合には、ハンドル角フラグFlagを1に設定して(S108)、S110へ進み、ハンドル角が閾値Rよりも小さい場合には、ハンドル角フラグFlagを1に設定することなく、S110へ進む。
【0032】
S110では、前方車両との車間距離を計測する。具体的には、レーダ装置12を用いて前方車両との車間距離を計測するとともに計測値dをメモリに記憶させる。
【0033】
次に、運転者の血圧値を計測する(S112)。具体的には、血圧センサ14を用いて運転者の血圧を計測するとともに計測値bをメモリに記憶させる。
【0034】
S114では、車両がカーブ走行状態であるか否かを判定する。この判定は、次の(1−1)の条件を満たすか否かに基づいて行う。
【0035】
(1−1)ハンドル角フラグFlagが1に設定されていることを判定した場合
つまり、(1−1)に示した条件を満たす場合、車両がカーブ走行状態であると判定する。
【0036】
次のS116では、車両が合流車線から本線に進入する合流状態であるか否かを判定する。この判定は、次の(2−1)〜(2−3)の条件を満たすか否かに基づいて行う。
【0037】
(2−1)運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいと判定した場合
(2−2)運転者による方向指示灯の点滅操作があると判定した場合
(2−3)白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだことを判定した場合
つまり、(2−1)〜(2−3)の全ての条件を満たす場合、車両が合流状態であると判定する。
【0038】
次のS118では、車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する。この判定は、次の(3−1)〜(3−4)の全ての条件を満たすか否かに基づいて行う。
【0039】
(3−1)レーダ装置12により前方車両が検出されたことを判定した場合
(3−2)運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいと判定した場合
(3−3)運転者による方向指示灯の点滅操作があると判定した場合
(3−4)白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだことを判定した場合
つまり、(3−1)〜(3−4)の全ての条件を満たす場合、車両が走行車線を変更して前方車両を追い越す追越状態であると判定する。
【0040】
次のS120では、車両が交通流走行状態であるか否かを判定する。この判定は、次の(4−1)を満たすか否かに基づいて行う。
【0041】
(4−1)レーダ装置12を用いて前方車両との距離Dを計測し、この計測した計測値DとS110にてメモリに記憶された計測値dの変化量(D−d)の大きさが予め定められた閾値よりも短いと判定した場合
つまり、(4−1)に示した条件を満たす場合、車両が交通流走行状態であると判定する。
【0042】
ここで、車両がカーブ走行状態でもなく、合流状態でもなく、追越状態でもなく、交通流走行状態でもない場合、S114〜S120の判定はNOとなり、次に、S600の生体センサルーチンを実施する。
【0043】
図3に、S600の生体センサルーチンのフローチャートを示す。この生体センサルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S602)。
【0044】
車速が警告速度以下の場合、S602の判定はNOとなり、本処理を終了する。
【0045】
また、車両の速度が警告速度を超過している場合、S602の判定はYESとなり、次に、S102にて決定した警告音の種類、音量、鳴動間隔に従い、第1の警告音をスピーカ15から出力させる(S604)。
【0046】
次に、運転者の血圧値を計測する(S606)。具体的には、血圧センサ14を用いて運転者の血圧を計測するとともに計測値Bをメモリに記憶させる。
【0047】
次に、メモリを参照して、S606にてメモリに記憶された血圧値Bと、S112にてメモリに記憶された血圧値bとの変化量(B−b)の大きさが予め定められた閾値よりも小さいか否かを判定する(S608)。すなわち、運転者の血圧値の変化量が閾値未満であるか否かを判定する。
【0048】
ここで、運転者の血圧値の変化量(B−b)の大きさが閾値未満となっている場合には、S608の判定はYESとなり、本処理を終了する。
【0049】
また、S604にて出力した警告音に反応し、運転者の血圧値の変化量が閾値以上になると、S608の判定はNOとなり、第1の警告音よりも警告の度合いの低い第2の警告音に変更する(S610)。本実施形態では、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0050】
そして、第2の警告音をスピーカ15から出力させる(S612)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0051】
このように、第1の警告音をスピーカ15から出力させた後、運転者の血圧値の変化量(B−b)の大きさが予め定められた閾値以上になった場合には、運転者が警告音を認識したものとして、警告音を出力しないようになっている。
【0052】
次に、計時用のタイマーをセットして計時を開始し(S614)、再度、車両の速度が警告速度を超過しているか否かを判定する(S616)。
【0053】
ここで、車速が警告速度以下となった場合、S616の判定はNOとなり、本処理を終了する。
【0054】
また、車両の速度が警告速度を超過している場合には、S616の判定はYESとなり、次に、タイマーのカウント値に基づいてタイムオーバを判定する(S618)。具体的には、タイマーにより予め定められた基準時間(例えば、10秒)が経過したか否かを判定する
タイマーにより予め定められた基準時間が経過していない場合、S618の判定はNOとなり、S616の判定を繰り返す。
【0055】
また、車両の速度が警告速度を超過しており、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更し(S620)、第1の警告音をスピーカ15から出力させる(S622)。
【0056】
このように、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させるようになっている。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0057】
このS600の生体センサルーチンが終了すると、図2のS100へ戻る。
【0058】
図2の説明に戻り、車両がカーブへ進入し、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値R以上になると、S106の判定はNOとなり、S108にてハンドル角フラグFlagが1に設定される。
【0059】
そして、車両がカーブへ進入し、S114にて車両がカーブを走行中であると判定されると、次に、S200のカーブ走行状態ルーチンを実施する。
【0060】
図4に、S200のカーブ走行状態ルーチンのフローチャートを示す。このカーブ走行状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S202)。
【0061】
車速が警告速度以下の場合、S202の判定はNOとなり、本処理を終了する。
【0062】
また、車速が警告速度を超過している場合、次に、ハンドル角フラグFlagが0に設定されているかを判定する(S204)。
【0063】
したがって、車速が警告速度を超過しており、かつ、ハンドル角フラグFlagが1に設定されている場合、S202、S204の判定はそれぞれYESとなり、警告音の設定を第1の警告音から第2の警告音に変更する(S206)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0064】
そして、第2の警告音をスピーカ15から出力させる(S208)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0065】
上記したように、車両が速度超過の状態でカーブを走行する場合には、警告音が出力されないようになっている。
【0066】
このS200のカーブ走行ルーチンが終了すると、図2のS100へ戻る。
【0067】
図2の説明に戻り、車両が合流車線から本線に進入する合流地点に進入し、車両が合流状態であると判定されると、S300の合流状態ルーチンを実施する。
【0068】
図5に、S300の合流状態ルーチンのフローチャートを示す。この合流状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S302)。
【0069】
ここで、車両の速度が警告速度を超過していない場合、S302の判定はNOとなり、本処理を終了する。
【0070】
また、車両の速度が警告速度を超過している場合、S302の判定はYESとなり、S304へ進む。
【0071】
S304では、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいか否か判定する。
【0072】
S306では、運転者による方向指示灯の点滅操作があるか否かを判定する。
【0073】
S308では、白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだか否かを判定する。
【0074】
ここで、車両が合流車線から本線に進入しようとして、S304〜S308の各判定がYESとなると、警告音の設定を第1の警告音から第2の警告音に変更する(S310)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0075】
そして、第2の警告音をスピーカ15から出力させ(S312)、図2のS100へ戻る。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0076】
なお、S304〜S308のいずれかの判定がNOとなった場合、警告音を出力することなくS302へ戻る。
【0077】
上記したように、車両が速度超過の状態で車両が合流車線から本線に進入しようとする場合には、車両の速度が警告速度を超過していても警告音が出力されないようになっている。
【0078】
このS300の合流状態ルーチンが終了すると、図2のS100へ戻る。
【0079】
図2の説明に戻り、車両が走行車線を変更して前方車両を追い越そうとすると、車両が追い越し状態であると判定され、S400の追越状態ルーチンを実施する。
【0080】
図6に、S400の追越状態ルーチンのフローチャートを示す。この追越状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S402)。
【0081】
ここで、車両の速度が警告速度を超過していない場合、S402の判定はNOとなり、本処理を終了する。
【0082】
また、車両の速度が警告速度を超過している場合、S402の判定はYESとなり、S406へ進む。
【0083】
S406では、レーダ装置12により前方車両が検出されたか否かに基づいて前方車両があるか否かを判定する。
【0084】
S408では、運転者のハンドル操作に応じてハンドル角の変化量が予め定められた閾値rよりも大きいか否か判定する。
【0085】
S410では、運転者による方向指示灯の点滅操作があるか否かを判定する。
【0086】
S412では、白線検知装置13より入力される情報に基づいて車両が車線を区切る白線を跨いだか否かを判定する。
【0087】
ここで、車両が走行車線を変更し、前方車両を追い越そうとして、S406〜S412の各判定がYESとなると、警告音の設定を第1の警告音から第2の警告音に変更する(S414)。具体的には、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0088】
そして、第2の警告音をスピーカ15から出力させ(S416)、図2のS100へ戻る。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0089】
なお、S406〜S412のいずれかの判定がNOとなった場合、警告音を出力することなくS402へ戻る。
【0090】
上記したように、車両が走行車線を変更し、前方車両を追い越そうとする場合には、車両の速度が警告速度を超過していても警告音が出力されないようになっている。
【0091】
このS400の追越状態ルーチンが終了すると、図2のS100へ戻る。
【0092】
図2の説明に戻り、車両が前方車両のアクセル操作やブレーキ操作に合わせて前方車両の後方を走行している場合、車両が交通流走行状態であると判定され、S500の交通流走行状態ルーチンを実施する。
【0093】
図7に、S500の交通流走行状態ルーチンのフローチャートを示す。この交通流走行状態ルーチンでは、まず、S102にて決定した警告速度および車速センサ10から入力される車速信号に基づいて車両の速度が警告速度を超過しているか否かを判定する(S502)。
【0094】
ここで、車両の速度が警告速度を超過していない場合、S502の判定はNOとなり、本処理を終了する。
【0095】
また、車両の速度が警告速度を超過している場合、S502の判定はYESとなり、S504へ進む。
【0096】
S504では、前方車両との距離を計測する。具体的には、レーダ装置12を用いて前方車両との距離を計測するとともに計測値Dをメモリに記憶させる。
【0097】
次に、メモリを参照して、S504にてメモリに記憶された計測値Dと、S110にてメモリに記憶された計測値dの変化量(D−d)の大きさが予め定められた閾値よりも短いか否かを判定する(S506)。
【0098】
ここで、前方車両との距離の変化量(D−d)の大きさが閾値以上となった場合には、S506の判定はNOとなり、本処理を終了する。
【0099】
また、前方車両との距離の変化量(D−d)の大きさが閾値未満となっている場合、S506の判定はYESとなり、警告音を第2の警告音に変更する(S508)。本実施形態では、音量を10段階分の0段階、すなわち、無音状態となるように変更する。
【0100】
そして、第2の警告音をスピーカ15から出力させる(S510)。なお、音量が10段階分の0段となっているので、実際には警告音はスピーカ15から出力されない。
【0101】
次に、計時用のタイマーをセットして計時を開始し(S512)、再度、車両の速度が警告速度を超過しているか否かを判定する(S514)。
【0102】
ここで、車速が警告速度以下となった場合、S514の判定はNOとなり、本処理を終了する。
【0103】
また、車両の速度が警告速度を超過している場合には、S514の判定はYESとなり、次に、タイマーのカウント値に基づいてタイムオーバを判定する(S516)。具体的には、タイマーにより予め定められた基準時間(例えば、10秒)が経過したか否かを判定する
タイマーにより予め定められた基準時間が経過していない場合、S516の判定はNOとなり、S516の判定を繰り返す。
【0104】
また、車両の速度が警告速度を超過しており、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更し(S518)、第1の警告音
をスピーカ15から出力させる(S520)。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0105】
このように、警告音を第2の警告音に変更した後、車両の速度が警告速度を超過していると判定され、かつ、タイマーにより予め定められた基準時間が経過した場合には、警告音を第1の警告音に変更するようになっている。なお、図示してないが、車速が警告速度以下になると、第1の警告音の出力を停止させ、本処理を終了する。
【0106】
上記した構成によれば、車両の速度が警告速度を超過していると判定された場合であっても、車両がカーブ走行状態にあると判定した場合、車両が合流車線から本線に進入する合流状態であると判定した場合、車両が走行車線を変更して前方車両を追い越す追越状態であると判定した場合、車両が交通流走行状態であると判定した場合といった、車両が警告を必要としない特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音がスピーカから出力されるので、運転者の煩わしさを低減することが可能である。
【0107】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0108】
例えば、上記実施形態では、車両がカーブ走行状態であると判定された場合、車両が合流状態であると判定された場合、車両が追越状態であると判定された場合、車両が交通流走行状態であると判定された場合、それぞれ警告音が無音となるように構成したものを示したが、例えば、第1の警告音よりも音量の小さな警告音を出力するようにしてもよく、第1の警告音よりも鳴動間隔の長い警告音を出力するようにしてもよく、第1の警告音よりも音量が小さく、かつ、鳴動間隔の長い警告音を出力するようにしてもよい。要するに第1の警告音よりも警告の度合いの低い警告音を出力するように構成すればよい。
【0109】
また、上記実施形態では、血圧センサを用いて運転者の血圧値を計測し、S608にて運転者の血圧値の変化量が予め定められた閾値よりも大きいか否かを判定したが、例えば、運転者の脈拍を検出する脈拍センサを備え、脈拍センサを用いて運転者の脈拍値を計測し、運転者の脈拍の変化量が予め定められた閾値よりも大きいか否かを判定するようにしてもよい。
【0110】
また、上記実施形態では、運転者のハンドル操作に応じて変化する舵角情報に基づいて車両がカーブ走行状態であるか否かを判定したが、例えば、ナビゲーション装置11から走行道路の道路形状を取得して車両がカーブ走行状態であるか否かを判定するようにしてもよい。
【0111】
また、上記実施形態では、生体センサルーチンS600および交通流走行状態ルーチンS500において、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させる例を示したが、このような状況に限定されるものではなく、例えば、カーブ走行状態ルーチンS200、合流状態ルーチンS300、追越状態ルーチンS400においても、同様に、警告音を第2の警告音に変更した後、予め定められた基準時間以上車両の速度が警告速度を超過している状態が継続していると判定された場合には、警告音を第1の警告音に変更してスピーカ15から出力させるようにしてもよい。
【0112】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、S602、S202、S302、S402、S502が速度超過判定手段に相当し、S604、S610、S612、S206、S208、S310、S312、S414、S416、S508、S510が警告音出力手段に相当し、S114、S116、S118、S120が特定状況判定手段に相当し、S114がカーブ走行判定手段に相当し、S116が合流状況判定手段に相当し、S118が追越状態判定手段に相当し、S120が交通流走行状態に相当し、S608が生体変化判定手段に相当し、S616、S618が判定手段に相当し、S620、S622、S518、S520が警告音変更手段に相当する。
【図面の簡単な説明】
【0113】
【図1】本発明の一実施形態に係る速度超過警告装置のブロック構成を示す図である。
【図2】制御装置のフローチャートである。
【図3】生体センサルーチンのフローチャートである。
【図4】カーブ走行状態ルーチンのフローチャートである。
【図5】合流状態ルーチンのフローチャートである。
【図6】追越状態ルーチンのフローチャートである。
【図7】交通流走行状態ルーチンのフローチャートである。
【符号の説明】
【0114】
1 速度超過警告装置
10 車速センサ
11 ナビゲーション装置
12 レーダ装置
13 白線検知装置
14 血圧センサ
15 スピーカ
16 制御装置
【特許請求の範囲】
【請求項1】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて前記車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、
前記合流状況判定手段により前記車両が合流車線から本線に進入する状況であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項2】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および前記車両前方の撮影画像に基づいて前記車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、
前記追越状態判定手段により前記車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項3】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて前記車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、
前記交通流走行状態判定手段により前記車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項4】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、
前記警告音出力手段は、前記第1の警告音を前記スピーカから出力させた後、前記生体変化判定手段により運転者の生体的特性の変化量が前記閾値よりも大きいと判定された場合、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項5】
前記警告音出力手段により前記第2の警告音が前記スピーカから出力されるようになった後、予め定められた基準時間以上前記車両の速度が前記警告速度を超過している状態が継続しているか否かを判定する判定手段と、
前記判定手段により前記第2の警告音が前記スピーカから出力されるようになった後、予め定められた基準時間以上前記車両の速度が前記警告速度を超過している状態が継続していると判定された場合、前記第1の警告音を前記スピーカから出力させるように変更する前記警告音変更手段と、を備えたことを特徴とする請求項1ないし4のいずれか1つに記載の速度超過警告装置。
【請求項1】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および走行道路の撮影画像に基づいて前記車両が合流車線から本線に進入する状況であるか否かを判定する合流状況判定手段と、
前記合流状況判定手段により前記車両が合流車線から本線に進入する状況であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項2】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者のハンドル操作に応じて変化する舵角情報、運転者による方向指示灯の点滅操作および前記車両前方の撮影画像に基づいて前記車両が走行車線を変更して前方車両を追い越す追越状態であるか否かを判定する追越状態判定手段と、
前記追越状態判定手段により前記車両が走行車線を変更して前方車両を追い越す追越状態であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項3】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
前方車両との車間距離の変化量が予め定められた範囲内であるか否かに基づいて前記車両が前方車両の走行に合わせて走行している交通流走行状態であるか否かを判定する交通流走行状態判定手段と、
前記交通流走行状態判定手段により前記車両が前方車両の走行に合わせて走行している交通流走行状態であると判定された場合、前記車両が前記警告を必要としない特定の状況にあると判定する特定状況判定手段を備え、
前記警告音出力手段は、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合であっても、前記特定状況判定手段により前記車両が前記特定の状況にあると判定された場合には、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項4】
車両の速度を検出して警告速度を超過しているか否かを判定する速度超過判定手段と、前記速度超過判定手段により前記車両の速度が前記警告速度を超過していると判定された場合、予め定められた第1の警告音をスピーカから出力させる警告音出力手段と、を備えた速度超過警告装置であって、
運転者の生体的特性の変化量を検出して予め定められた閾値よりも大きいか否かを判定する生体変化判定手段を備え、
前記警告音出力手段は、前記第1の警告音を前記スピーカから出力させた後、前記生体変化判定手段により運転者の生体的特性の変化量が前記閾値よりも大きいと判定された場合、前記第1の警告音よりも警告の度合いの低い第2の警告音を前記スピーカから出力させることを特徴とする速度超過警告装置。
【請求項5】
前記警告音出力手段により前記第2の警告音が前記スピーカから出力されるようになった後、予め定められた基準時間以上前記車両の速度が前記警告速度を超過している状態が継続しているか否かを判定する判定手段と、
前記判定手段により前記第2の警告音が前記スピーカから出力されるようになった後、予め定められた基準時間以上前記車両の速度が前記警告速度を超過している状態が継続していると判定された場合、前記第1の警告音を前記スピーカから出力させるように変更する前記警告音変更手段と、を備えたことを特徴とする請求項1ないし4のいずれか1つに記載の速度超過警告装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−133818(P2012−133818A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2012−76798(P2012−76798)
【出願日】平成24年3月29日(2012.3.29)
【分割の表示】特願2008−62914(P2008−62914)の分割
【原出願日】平成20年3月12日(2008.3.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成24年3月29日(2012.3.29)
【分割の表示】特願2008−62914(P2008−62914)の分割
【原出願日】平成20年3月12日(2008.3.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]