
連結自動車
【課題】使い勝手のよい連結自動車を提供する。
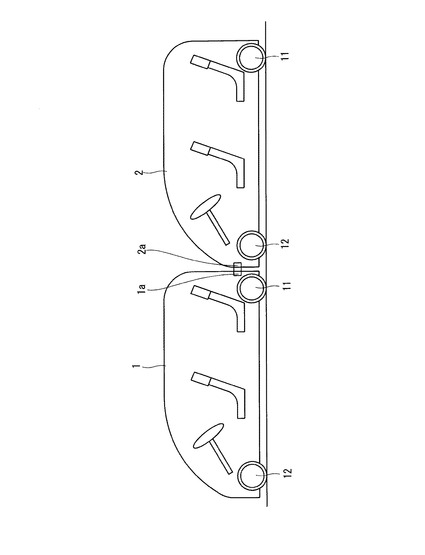
【解決手段】連結自動車は、各々が独立走行可能な二台の自動車1,2を連結させて構成される。上記二台の自動車1,2はその後部同士が連結機構1a,2aによって分離可能に連結されている。連結状態では、上記自動車1が運転自動車となり、自動車2が被連結自動車となる。利用者が上記自動車1に乗車して運転操作を行うことにより自動車1,2の連結走行が行われる。
【解決手段】連結自動車は、各々が独立走行可能な二台の自動車1,2を連結させて構成される。上記二台の自動車1,2はその後部同士が連結機構1a,2aによって分離可能に連結されている。連結状態では、上記自動車1が運転自動車となり、自動車2が被連結自動車となる。利用者が上記自動車1に乗車して運転操作を行うことにより自動車1,2の連結走行が行われる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数の自動車を連結して走行させることができる連結自動車に関するものである。
【背景技術】
【0002】
複数の車両を連結して走行させることができる連結車両は、例えばトレーラ等の貨物自動車で採用されており、このような貨物自動車の場合は、独立走行が行える自動車によって独立走行できない貨物車両を牽引するようにしている。
【0003】
また、このような貨物用とは用途が異なる一般用車両に関しても連結車両が提案されており、例えば特許文献1には、多人数乗りのワゴン型自動車から運転席部分を分離して独立走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−1490号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1で示される連結車両は、独立走行が可能な1人乗り用車両と、この1人乗り用車両に牽引される多人数用車両とに分離される構造であり、上記多人数用車両を独自に走行させることはできず、使い勝手が良いとはいえない。
【0006】
この発明は、使い勝手のよい連結自動車を提供することを課題とする。
【課題を解決するための手段】
【0007】
前記の課題を解決するために、この発明の連結自動車は、独立走行するのに必要な要素を備えた複数の自動車が相互に連結及び離脱が行えるように構成されており、複数連結された自動車のうち一つの自動車を用いた運転操作によって連結走行が行われる。
【0008】
このような構成を有することにより、連結された状態では一つの自動車の運転操作によって連結走行することができ、連結が解除されて単独自動車とされた場合も各自動車は独立走行することができるので、例えば、二つの目的地の最寄り地点までは連結自動車の状態で走行し、この最寄り地点から各自動車で別々に目的地へ行くことができるなど、使い勝手がよくなる。
【0009】
上記自動車は車体に搭載した電動モータ又は車輪に組み込まれた電動モータを走行用バッテリにより駆動する自動車であってもよい。そして、各自動車に設けられた電源入出力部を相互に接続すると、自動車間で上記バッテリが並列に接続されて共用されるようにしてもよい。このように走行用バッテリが共用される構成であれば、連結走行で運転操作される自動車の走行用バッテリだけが消費されて各自動車のバッテリ残量に差異が生じてしまうのを防止することができる。
【0010】
上記複数の自動車は信号の送受が行えるように構成され、上記運転操作される自動車の走行状態情報又は当該運転操作される自動車から出力される走行制御指令が上記送受信部によって他の自動車に伝送され、上記走行状態情報又は走行制御指令に基づいて当該他の自動車がその独立走行するのに必要な要素に対して、操舵制御、制動制御及び走行速度制御の少なくとも一つを行うこととしてもよい。
【0011】
上記構成を有することにより、上記運転操作される自動車以外の自動車における上記要素も活用して連結時の走行性の向上を図ることができる。
【0012】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記運転操作される自動車の車輪の回転制御に対して上記他の自動車の車輪の回転制御が正逆反転して行われるようにしてもよい。また、上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記他の自動車の前側にもブレーキランプが設けられており、上記運転操作される自動車のブレーキ操作によって上記他の自動車の前側のブレーキランプを点灯させるようにしてもよい。
【0013】
上記運転操作される自動車に対して他の自動車は正向きに連結されることとしてもよい。
【0014】
連結された自動車の駆動輪以外の全部又は一部の車輪を路面から離間させる車輪収納機構を備えていてもよい。また、連結された自動車の駆動輪以外の全部又は一部の車輪を自由回転させるクラッチ機構を備えていてもよい。
【0015】
各自動車は揺動不能に固定的に連結されるようにしてもよい。また、このように各自動車が固定的に連結される構造において、上記複数の自動車の室内空間を連通させる連通構造を有することとしてもよい。
【発明の効果】
【0016】
この発明は、例えば二つの目的地の最寄り地点までは連結自動車の状態で走行し、この最寄り地点から別々に各自動車で目的地へ行くことができるなど、使い勝手がよくなるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る後−後連結自動車を示した説明である。
【図2】同図(a)(b)(c)はそれぞれこの発明に係る自動車連結機構を示した説明図である。
【図3】この発明に係る室内連通の概略を示した説明図である。
【図4】この発明に係る自動車の走行制御系の概要を示した説明図である。
【図5】この発明の一実施形態に係る後−前連結自動車を示した説明である。
【図6】この発明に係る連結自動車を構成する自動車の駆動形態の一例を示した説明である。
【図7】この発明に係る連結自動車を構成する自動車の駆動形態の一例を示した説明である。
【発明を実施するための形態】
【0018】
以下、この発明の実施の形態を添付図面に基づいて説明する。
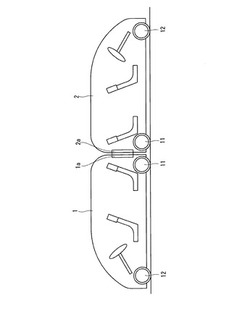
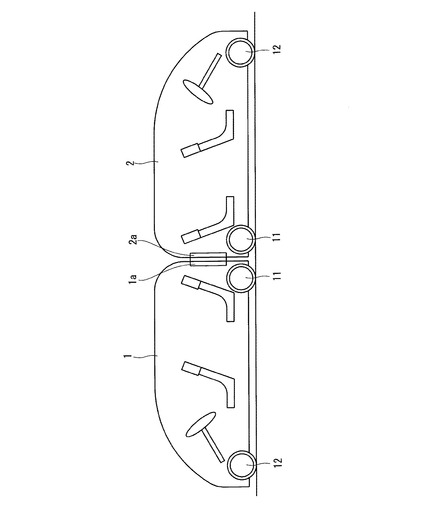
この実施形態の連結自動車は、図1に示しているように、各々が独立走行可能な二台の自動車1,2を連結させて構成される。この図1に例示した連結形態では、二台の自動車1,2はその後部同士が連結機構1a,2aによって連結されており、自動車1を運転自動車とし、自動車2を被連結自動車としている。上記自動車1,2は、全く同じ構造を有することによって運転自動車と被連結自動車のどちらにもなれるようにすることもできるが、この実施形態においては、自動車1を運転自動車とし自動車2を被連結自動車とする仕様であるとして説明していく。
【0019】
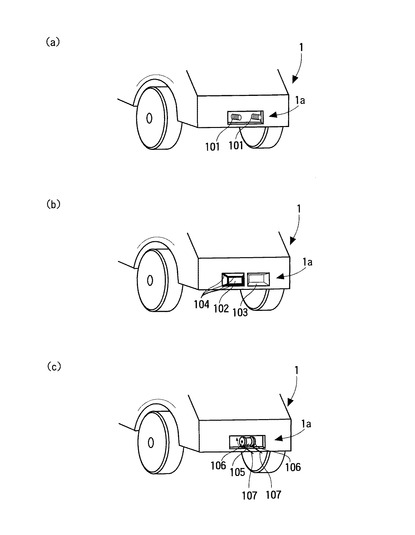
また、上記連結機構1a,2aとしては、トレーラー車などで採用されているフックやピボットなどを用いた揺動可能な機構を採用することもできるが、これに限るものではなく、自動車1,2を固定的に連結する固定連結機構も採用することができる。この固定連結機構としては、図2(a)に示すボルト締結構造がある。このボルト締結構造は、一方の自動車の後部に水平に配置された2本のボルト101と、他方の自動車の後部に設けられ、上記2本のボルト101の間隔と同じ間隔で2つの貫通穴が形成された図示しない連結プレートとから成り、上記ボルト101を上記連結プレートの貫通穴に通した状態でナットを各ボルト101に螺合させることで固定連結する構造である。また、図2(b)に示すように、互いに嵌まり合う形状の凸部102と凹部103とを各自動車1,2の後部に設けておき、自動車1,2の凸部102と凹部103とを嵌合させた状態で上記凸部102の角部に固定されているチューブ104に空気をコンプレッサによって注入し、この注入により膨らんだチューブ104を凹部103の角部に形成されている溝部に係合させる構造を採用することも可能である。また、図2(c)に示すように、自動車1の後端に固定された電動モータ105の回転軸に巻き取りローラ106,106を設けておき、自動車2に固定されたロープ107,107を上記巻き取りローラ106,106によって巻き取ることで自動車同士を引っ張り合わせて固定連結する構造も考えられる。この図2(c)の巻き取り構造を採用する場合においては、自動車1,2の後部の互いに接触することになる箇所にゴムなどから成る緩衝部材を配置しておくことも考えられる。なお、以上に説明した3種類の方法に限るものではなく、電磁ソレノイドを利用したロック機構を用いて固定連結する方法や電磁石を用いて固定連結する方法なども考えられる。
【0020】
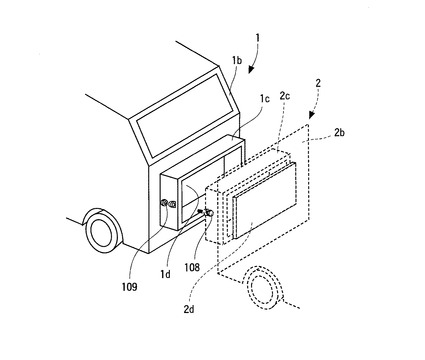
図3は、連結される自動車1,2の互いの室内空間を連通させるための構造例を示している。この構造例では、自動車1,2はそれぞれバックドア1b,2bに枠状連結部1c,2cを備えており、これら枠状連結部1c,2cを例えばボルト108とナット109で互いに連結することができる。もちろん、これに限るものではなく、電磁ソレノイドを用いた電動ロック機構を用いたり、電磁石を用いた吸引機構を用いて自動車1,2を連結固定することもできる。各枠状連結部1c,2cで囲まれている取り外し部1d,2dはバックドア1b,2bに対して着脱自在に設けられており、この取り外し部1d,2dを取り外すと、自動車1,2の室内空間が連通されることになる。なお、枠状連結部1c,2cによる連結と上記の図2に示した連結構造による連結とを併用することも可能である。
【0021】
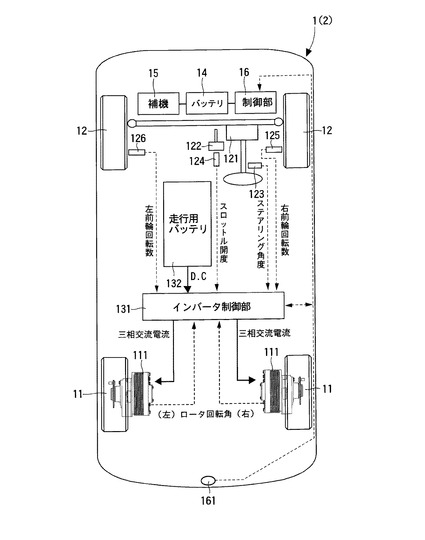
図4は、自動車1(2)の走行制御系の概要を示した説明図である。この図4に示す例においては、インホイールモータ駆動装置111によって後輪11が駆動される構造となっている。もちろん、この構造は一例であり、四輪全てをインホイールモータ駆動装置111により駆動する構造等も採用できる。上記インホイールモータ駆動装置111は、駆動力を発生させるモータ部と、このモータ部の回転速度を減速して出力する減速部と、この減速部からの回転出力を後輪11に伝える車輪ハブ軸受部とを備える。前輪12はステアリング装置121によって操舵制御される。ステアリング装置121の操作によるステアリング角度及びペダル122の踏み込み操作によるスロットル開度は、それぞれセンサ123,124によって検出され、この検出によるステアリング角度情報及びスロットル開度情報はインバータ制御部131に伝送される。また、前輪12の回転数はセンサ125,126によって検出され、この検出に基づく回転数情報もインバータ制御部131に伝送される。
【0022】
インバータ制御部131は、走行用バッテリ132から入力された直流電流を例えば三相交流電流に変換して上記インホイールモータ駆動装置111に供給する装置であり、上記スロットル開度情報に基づいて三相交流電流の周波数を制御してインホイールモータ駆動装置111におけるモータ部の回転数を制御する。そして、このインバータ制御部131は、上記回転数制御において、上記各モータ部のロータ回転角を示す検出情報を用いて回転調整を行う。更に、上記インバータ制御部131は、ステアリング角度情報や左右の前輪12の回転数情報に基づいて、カーブ走行時における左右のインホイールモータ駆動装置111のモータ回転数差を適切に生じさせるなどの制御を行うこともできる。
【0023】
バッテリ14は、補機15及び制御部16などに直流電力を供給する。上記の補機15はパワーステアリングや冷却ポンプなどから成る。
【0024】
制御部16は、各種の制御プログラムが格納されるROM、作業用メモリ等として利用されるRAM、上記制御プログラムを実行するCPU、外部からのセンサ信号や外部への制御信号の入出力を担うI/Oインターフェースなどを備えて成る。制御部16は、自動車1の独立走行における各種制御の他、自動車1,2を連結するときの運転者へのアシスト制御、自動車1,2を連結した後の自動車1から自動車2に対する各種情報の出力や各種制御指令の出力も行う。上記の各種情報としては、自動車2へ与える自動車1のステアリング角度情報やスロットル開度情報など(自動車1の走行状態情報)がある。また、上記各種制御指令としては、自動車1のステアリング角度情報やスロットル開度情報などに基づき自動車1の制御部16が自動車2のために生成する走行制御指令がある。上記各種情報や各種制御情報の伝送に関しては、自動車間無線通信技術を用いた情報送受信の他、自動車1,2の一方に設けられたプラグを他方のソケットに接続することによる有線通信技術を用いることもできる。この有線通信技術を用いる場合は、上記プラグとソケットの接続によって自動車1,2の各制御部16が自動車1,2の連結を検知できることになるが、無線接続技術の場合には、先に説明した自動車の機械的連結によって動作するスイッチや近接センサを設けておき、このスイッチなどの動作によって自動車1,2の各制御部16が自動車1,2の連結を検知できるようにしておいてもよい。
【0025】
自動車1,2を連結する際のアシストを運転者に対して行うために、自動車1の後部側に多数の小受光部を水平配置した光検出部161を設けておき、自動車2の後部側に上記光検出部161と同じ高さで図示しないレーザー発光部を設けておいてもよい。そして、自動車1の運転席のパネルに、連結する時の自動車1,2の左右の位置ずれを表すためのモニタを設けておき、このモニタに上記レーザー発光部から出射されたレーザー光が上記光検出部161の中心からどの程度左右にずれているか(受光している小受光部が中心から何個目の受光部であるか)を表示することが考えられる。運転者は上記モニタの表示を見てバック運転でハンドルを操作し、自動車1の連結機構1aを自動車2の連結機構の2aの位置に正確に合わせることができる。なお、例えば、パワーステアリングの電動モータに操舵信号を与えて自動操縦できる構造とするとともに制御部16が上記光検出部161からの受光位置情報に基づいて上記操舵信号を生成することで、自動車連結の自動化を実現することも可能である。また、上記レーザー光を用いたアシストの他に、撮像カメラによる撮像画像情報や超音波による測距信号を用いて運転者へのアシスト情報(画像、案内音声等)を生成したり、上記の連結自動化のための操舵信号を生成することもできる。また、全車輪の操舵角度を90°とすることができる構造を採用する場合は、自動車の真横移動が可能となるので、自動車を連結する際の自動車1,2の左右方向のずれを簡単に解消することができ、連結作業が容易になる。
【0026】
次に、自動車1,2における連結走行の態様について説明していく。
(1)連結走行時には、自動車2のインホイールモータ駆動装置111への電力供給を停止する態様が考えられる。この電力供給停止を選択するための操作方法としては、自動車2において「連結走行−駆動停止」と標記されたモード選択ボタンを利用者が操作する方法の他、自動車1において「連結走行−駆動停止」と標記されたモード選択ボタンを利用者が操作すると、自動車1から自動車2へ、インホイールモータ駆動装置111への電力供給を停止させる制御信号を送信するといった方法などが考えられる。インホイールモータ駆動装置111への電力供給停止が適用される自動車2においては、そのインホイールモータ駆動装置111のモータ部と減速部との間に電動で操作されるクラッチ装置が設けられるのがよい。そして、この自動車2において「連結走行−駆動停止」のボタンが操作されたときや、自動車2が自動車1から上記制御信号を受信したときに、自動車2は上記クラッチ装置を作動させて後輪11の自由な回転を許容することとしてもよい。このように、自動車2において後輪11の自由な回転が許容されることで自動車1の走行負荷を軽減することができる。
【0027】
(2)連結走行時にも自動車2のインホイールモータ駆動装置111への電力供給を維持する態様もある。この電力供給維持を選択するための操作方法としては、自動車2において「連結走行−駆動維持」と標記されたモード選択ボタンを利用者が操作する方法の他、自動車1において「連結走行−駆動維持」と標記されたモード選択ボタンを利用者が操作すると、自動車1から自動車2へ、「連結走行−駆動維持」を示す信号を送信する方法が考えられる。このような「連結走行−駆動維持」が選択される場合には、自動車2のインホイールモータ駆動装置111に対する駆動制御信号を自動車1の側から送信する方法が考えられる。この駆動制御信号の送信例としては、例えば、自動車1のインバータ制御部131に供給される自動車1の左右の前輪回転数を示す情報を、インバータ制御部131又は制御部16によって自動車1から自動車2へ送信する方法が考えられる。この場合、自動車2の制御部16又はインバータ制御部131は、上記情報を受け取って自身のインホイールモータ駆動装置111の駆動を制御し、自動車2の後輪11を自動車1の後輪11と同じ回転数で回転させる。なお、この実施形態における後−後連結においては、自動車の前後関係が逆になるので、自動車2におけるインホイールモータ駆動装置111の回転方向を自動車1に対して逆転させるとともに、カーブ走行時には、自動車1の左後輪11と自動車2の右後輪11の回転数を同じとし、自動車1の右後輪11と自動車2の左後輪11の回転数が同じとなるように、左右のインホイールモータ駆動装置111を制御することになる。
【0028】
(3)上記の(1)及び(2)のどちらの場合にも適用できるが、自動車1のステアリング角度(操舵角度)の情報に基づいて自動車2の側でそのステアリング装置121を自動操作することも可能である。ステアリング装置121の自動操作は例えばパワーステアリングを構成する電動モータを制御することで実現できる。この実施形態における後−後連結においては、自動車1の前輪(連結自動車としての前輪)と自動車2の前輪(連結自動車としての後輪)の各々の操舵が可能であり、これは1台の連結自動車において四輪操舵が行える構成に相当することになるので、既存の四輪操舵に関連する操舵制御技術を自動車1,2の連結自動車において適用し、自動車連結状態で四輪操舵が行われる構成としてもよい。この四輪操舵の制御例としては、自動車1の制御部16が自動車2に対する操舵指示信号を生成し、この操舵指示信号を受信した自動車2の制御部16が自動車2のステアリングを操作することとしてもよいし、或いは、自動車1のステアリング角度情報や速度情報などを自動車2の制御部16が受信して自動車2の制御部16が自身のステアリングに対する操舵指示信号を生成することとしてもよい。
【0029】
(4)自動車1,2の連結走行においては、図5に示すように、後−前連結とすることも可能である。この後−前連結とする場合においても、自動車2のインホイールモータ駆動装置111への電力供給を停止する制御と、自動車2のインホイールモータ駆動装置111への電力供給を維持する制御とのいずれもが行える。この後−前連結の場合は自動車1と自動車2で車輪の左右逆転や逆回転は生じない。また、この後−前連結の場合において、非直線走行での自動車1のステアリング角度及び車輪回転数が、その時点の自動車1の位置に自動車2が到達した時に自動車2のステアリング及び車輪において実現されるように、上記自動車2への駆動制御信号を自動車1の側で遅延させて自動車2に送信する制御を行ったり、遅延せずに送信される上記駆動制御信号を自動車2が受信し、自動車2においてインバータ制御部131への供給タイミングを遅らせる制御を行うようにしてもよい。このような情報遅延や動作遅延は、自動車連結が固定連結とされる場合よりも、揺動可能な連結とされる場合に好適であると考えられる。なお、直進走行時(ステアリング角度が一定角度以内のとき)には、上記遅延を伴わずに加速制御や減速制御が行われる。
【0030】
(5)上記の後−前連結の場合、自動車1の後輪11を自由回転させる一方、自動車1から自動車2に送信されるステアリング角度情報やスロットル開度情報によって自動車2における後輪11を駆動制御することも考えられる。また、このように自動車2の後輪11を駆動する場合、自動車1の後輪11及び自動車2の前輪12を昇降機構により支持しておき、上記昇降機構により自動車1の後輪11及び自動車2の前輪12を上昇収納して路面から離間させ、四輪走行させることも可能である。また、二輪だけ上昇収納して六輪走行させることも可能である。路面に接する車輪数を減らすことで走行効率が向上することになる。
【0031】
(6)上記の後−前連結及び後−後連結のいずれにも適用できるが、各自動車1,2の四輪全てにインホイールモータ装置111を設けた場合、連結自動車では八輪駆動とすることもできるし、連結自動車における八輪中の二輪或いは四輪のインホイールモータ装置111への電力供給を停止して六輪駆動或いは四輪駆動とすることもできる。駆動輪の選択は自動車1の側から他の自動車に対して指令信号を送信することで行うこともできるし、各自動車において駆動輪選択ボタンを操作することで選択することも可能である。駆動輪として選択されずに電力供給が停止されるインホイールモータ装置111に関してはクラッチを作動させることで車輪の自由な回転を確保することができる。
【0032】
(7)上記の後−前連結及び後−後連結のいずれにも適用できるが、自動車1,2の走行用バッテリ132に接続される電源ラインに外部接続用のプラグとソケットを設けておき、自動車1,2間で上記プラグとソケットを接続することにより自動車1,2における二つの走行用バッテリ132が並列接続されるようにしてもよい。これにより、自動車1,2の走行用バッテリ132が自動車1,2で共用されることになるので、例えば、連結走行によって一方の自動車の走行用バッテリ132だけが消費されて両者の電池残量に差異が生じるといった事態を防止することができる。
【0033】
(8)上記の後−前連結及び後−後連結のいずれにも適用できるが、自動車1においてブレーキペダルが踏まれたときには、自動車1及び自動車2の双方において制動をかけることとするのがよい。また、ブレーキランプについては、後−前連結の場合、自動車2のブレーキランプも点灯させることとする。具体的には、自動車1のブレーキペダルが操作されたときに、そのことを示す信号が自動車1の制御部16から自動車2の制御部16に伝送され、この自動車2の制御部16が自動車2のブレーキランプを点灯させる。一方、後−後連結の場合、自動車2の前側が後方を向くことになるので、自動車2のフロント部にもブレーキランプを設けておき、自動車1においてブレーキペダルが踏まれたときに自動車2の前記フロント部に設けたブレーキランプを点灯させるのがよい。なお、バック走行時に点灯するバックランプについても同様にフロント部に設けることも考えられる。
【0034】
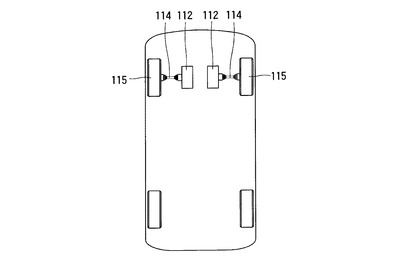
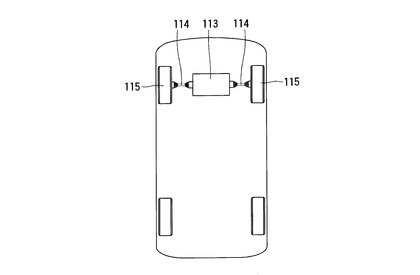
以上説明した実施例においては、車輪をインホイールモータ装置111によって駆動する構造を例示したが、このような構造に限るものではなく、図6又は図7に示すように、車体側に電動モータ112或いは113を搭載し、これら電動モータの出力を図示しない減速機及び等速ジョイント114によって車輪115に伝達する構造を採用してもよい。また上記減速機及びインホイールモータ装置111の減速部として遊星歯車減速機やサイクロイド減速機を採用することができる。また、自動車1,2として四輪車を示したが、三輪車或いは二輪車とすることもできる。二輪車同士を連結する場合には、前後ではなく横並びに連結する。二輪車のハンドル同士を棒状部材で連結すれば一方の自動車のハンドルの操作を他方の自動車のハンドルに伝達することができる。また、自動車1,2におけるブレーキ装置やステアリング装置121などについて、バイワイヤ機構を適用することもできる。
【0035】
以上、図面を参照してこの発明の実施形態を説明したが、この発明は、図示した実施形態のものに限定されない。図示した実施形態に対して、この発明と同一の範囲内において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。
【符号の説明】
【0036】
1,2 自動車
1a,2a 連結機構
11 後輪
12 前輪
14 バッテリ
16 制御部
101 ボルト
102 凸部
103 凹部
105 モータ
106 巻き取りローラ
107 ロープ
111 インホイールモータ装置
121 ステアリング装置
122 スロットル
123 センサ
124 センサ
125 センサ
126 センサ
131 インバータ制御部
132 走行用バッテリ
161 光検出部
【技術分野】
【0001】
この発明は、複数の自動車を連結して走行させることができる連結自動車に関するものである。
【背景技術】
【0002】
複数の車両を連結して走行させることができる連結車両は、例えばトレーラ等の貨物自動車で採用されており、このような貨物自動車の場合は、独立走行が行える自動車によって独立走行できない貨物車両を牽引するようにしている。
【0003】
また、このような貨物用とは用途が異なる一般用車両に関しても連結車両が提案されており、例えば特許文献1には、多人数乗りのワゴン型自動車から運転席部分を分離して独立走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−1490号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1で示される連結車両は、独立走行が可能な1人乗り用車両と、この1人乗り用車両に牽引される多人数用車両とに分離される構造であり、上記多人数用車両を独自に走行させることはできず、使い勝手が良いとはいえない。
【0006】
この発明は、使い勝手のよい連結自動車を提供することを課題とする。
【課題を解決するための手段】
【0007】
前記の課題を解決するために、この発明の連結自動車は、独立走行するのに必要な要素を備えた複数の自動車が相互に連結及び離脱が行えるように構成されており、複数連結された自動車のうち一つの自動車を用いた運転操作によって連結走行が行われる。
【0008】
このような構成を有することにより、連結された状態では一つの自動車の運転操作によって連結走行することができ、連結が解除されて単独自動車とされた場合も各自動車は独立走行することができるので、例えば、二つの目的地の最寄り地点までは連結自動車の状態で走行し、この最寄り地点から各自動車で別々に目的地へ行くことができるなど、使い勝手がよくなる。
【0009】
上記自動車は車体に搭載した電動モータ又は車輪に組み込まれた電動モータを走行用バッテリにより駆動する自動車であってもよい。そして、各自動車に設けられた電源入出力部を相互に接続すると、自動車間で上記バッテリが並列に接続されて共用されるようにしてもよい。このように走行用バッテリが共用される構成であれば、連結走行で運転操作される自動車の走行用バッテリだけが消費されて各自動車のバッテリ残量に差異が生じてしまうのを防止することができる。
【0010】
上記複数の自動車は信号の送受が行えるように構成され、上記運転操作される自動車の走行状態情報又は当該運転操作される自動車から出力される走行制御指令が上記送受信部によって他の自動車に伝送され、上記走行状態情報又は走行制御指令に基づいて当該他の自動車がその独立走行するのに必要な要素に対して、操舵制御、制動制御及び走行速度制御の少なくとも一つを行うこととしてもよい。
【0011】
上記構成を有することにより、上記運転操作される自動車以外の自動車における上記要素も活用して連結時の走行性の向上を図ることができる。
【0012】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記運転操作される自動車の車輪の回転制御に対して上記他の自動車の車輪の回転制御が正逆反転して行われるようにしてもよい。また、上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記他の自動車の前側にもブレーキランプが設けられており、上記運転操作される自動車のブレーキ操作によって上記他の自動車の前側のブレーキランプを点灯させるようにしてもよい。
【0013】
上記運転操作される自動車に対して他の自動車は正向きに連結されることとしてもよい。
【0014】
連結された自動車の駆動輪以外の全部又は一部の車輪を路面から離間させる車輪収納機構を備えていてもよい。また、連結された自動車の駆動輪以外の全部又は一部の車輪を自由回転させるクラッチ機構を備えていてもよい。
【0015】
各自動車は揺動不能に固定的に連結されるようにしてもよい。また、このように各自動車が固定的に連結される構造において、上記複数の自動車の室内空間を連通させる連通構造を有することとしてもよい。
【発明の効果】
【0016】
この発明は、例えば二つの目的地の最寄り地点までは連結自動車の状態で走行し、この最寄り地点から別々に各自動車で目的地へ行くことができるなど、使い勝手がよくなるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る後−後連結自動車を示した説明である。
【図2】同図(a)(b)(c)はそれぞれこの発明に係る自動車連結機構を示した説明図である。
【図3】この発明に係る室内連通の概略を示した説明図である。
【図4】この発明に係る自動車の走行制御系の概要を示した説明図である。
【図5】この発明の一実施形態に係る後−前連結自動車を示した説明である。
【図6】この発明に係る連結自動車を構成する自動車の駆動形態の一例を示した説明である。
【図7】この発明に係る連結自動車を構成する自動車の駆動形態の一例を示した説明である。
【発明を実施するための形態】
【0018】
以下、この発明の実施の形態を添付図面に基づいて説明する。
この実施形態の連結自動車は、図1に示しているように、各々が独立走行可能な二台の自動車1,2を連結させて構成される。この図1に例示した連結形態では、二台の自動車1,2はその後部同士が連結機構1a,2aによって連結されており、自動車1を運転自動車とし、自動車2を被連結自動車としている。上記自動車1,2は、全く同じ構造を有することによって運転自動車と被連結自動車のどちらにもなれるようにすることもできるが、この実施形態においては、自動車1を運転自動車とし自動車2を被連結自動車とする仕様であるとして説明していく。
【0019】
また、上記連結機構1a,2aとしては、トレーラー車などで採用されているフックやピボットなどを用いた揺動可能な機構を採用することもできるが、これに限るものではなく、自動車1,2を固定的に連結する固定連結機構も採用することができる。この固定連結機構としては、図2(a)に示すボルト締結構造がある。このボルト締結構造は、一方の自動車の後部に水平に配置された2本のボルト101と、他方の自動車の後部に設けられ、上記2本のボルト101の間隔と同じ間隔で2つの貫通穴が形成された図示しない連結プレートとから成り、上記ボルト101を上記連結プレートの貫通穴に通した状態でナットを各ボルト101に螺合させることで固定連結する構造である。また、図2(b)に示すように、互いに嵌まり合う形状の凸部102と凹部103とを各自動車1,2の後部に設けておき、自動車1,2の凸部102と凹部103とを嵌合させた状態で上記凸部102の角部に固定されているチューブ104に空気をコンプレッサによって注入し、この注入により膨らんだチューブ104を凹部103の角部に形成されている溝部に係合させる構造を採用することも可能である。また、図2(c)に示すように、自動車1の後端に固定された電動モータ105の回転軸に巻き取りローラ106,106を設けておき、自動車2に固定されたロープ107,107を上記巻き取りローラ106,106によって巻き取ることで自動車同士を引っ張り合わせて固定連結する構造も考えられる。この図2(c)の巻き取り構造を採用する場合においては、自動車1,2の後部の互いに接触することになる箇所にゴムなどから成る緩衝部材を配置しておくことも考えられる。なお、以上に説明した3種類の方法に限るものではなく、電磁ソレノイドを利用したロック機構を用いて固定連結する方法や電磁石を用いて固定連結する方法なども考えられる。
【0020】
図3は、連結される自動車1,2の互いの室内空間を連通させるための構造例を示している。この構造例では、自動車1,2はそれぞれバックドア1b,2bに枠状連結部1c,2cを備えており、これら枠状連結部1c,2cを例えばボルト108とナット109で互いに連結することができる。もちろん、これに限るものではなく、電磁ソレノイドを用いた電動ロック機構を用いたり、電磁石を用いた吸引機構を用いて自動車1,2を連結固定することもできる。各枠状連結部1c,2cで囲まれている取り外し部1d,2dはバックドア1b,2bに対して着脱自在に設けられており、この取り外し部1d,2dを取り外すと、自動車1,2の室内空間が連通されることになる。なお、枠状連結部1c,2cによる連結と上記の図2に示した連結構造による連結とを併用することも可能である。
【0021】
図4は、自動車1(2)の走行制御系の概要を示した説明図である。この図4に示す例においては、インホイールモータ駆動装置111によって後輪11が駆動される構造となっている。もちろん、この構造は一例であり、四輪全てをインホイールモータ駆動装置111により駆動する構造等も採用できる。上記インホイールモータ駆動装置111は、駆動力を発生させるモータ部と、このモータ部の回転速度を減速して出力する減速部と、この減速部からの回転出力を後輪11に伝える車輪ハブ軸受部とを備える。前輪12はステアリング装置121によって操舵制御される。ステアリング装置121の操作によるステアリング角度及びペダル122の踏み込み操作によるスロットル開度は、それぞれセンサ123,124によって検出され、この検出によるステアリング角度情報及びスロットル開度情報はインバータ制御部131に伝送される。また、前輪12の回転数はセンサ125,126によって検出され、この検出に基づく回転数情報もインバータ制御部131に伝送される。
【0022】
インバータ制御部131は、走行用バッテリ132から入力された直流電流を例えば三相交流電流に変換して上記インホイールモータ駆動装置111に供給する装置であり、上記スロットル開度情報に基づいて三相交流電流の周波数を制御してインホイールモータ駆動装置111におけるモータ部の回転数を制御する。そして、このインバータ制御部131は、上記回転数制御において、上記各モータ部のロータ回転角を示す検出情報を用いて回転調整を行う。更に、上記インバータ制御部131は、ステアリング角度情報や左右の前輪12の回転数情報に基づいて、カーブ走行時における左右のインホイールモータ駆動装置111のモータ回転数差を適切に生じさせるなどの制御を行うこともできる。
【0023】
バッテリ14は、補機15及び制御部16などに直流電力を供給する。上記の補機15はパワーステアリングや冷却ポンプなどから成る。
【0024】
制御部16は、各種の制御プログラムが格納されるROM、作業用メモリ等として利用されるRAM、上記制御プログラムを実行するCPU、外部からのセンサ信号や外部への制御信号の入出力を担うI/Oインターフェースなどを備えて成る。制御部16は、自動車1の独立走行における各種制御の他、自動車1,2を連結するときの運転者へのアシスト制御、自動車1,2を連結した後の自動車1から自動車2に対する各種情報の出力や各種制御指令の出力も行う。上記の各種情報としては、自動車2へ与える自動車1のステアリング角度情報やスロットル開度情報など(自動車1の走行状態情報)がある。また、上記各種制御指令としては、自動車1のステアリング角度情報やスロットル開度情報などに基づき自動車1の制御部16が自動車2のために生成する走行制御指令がある。上記各種情報や各種制御情報の伝送に関しては、自動車間無線通信技術を用いた情報送受信の他、自動車1,2の一方に設けられたプラグを他方のソケットに接続することによる有線通信技術を用いることもできる。この有線通信技術を用いる場合は、上記プラグとソケットの接続によって自動車1,2の各制御部16が自動車1,2の連結を検知できることになるが、無線接続技術の場合には、先に説明した自動車の機械的連結によって動作するスイッチや近接センサを設けておき、このスイッチなどの動作によって自動車1,2の各制御部16が自動車1,2の連結を検知できるようにしておいてもよい。
【0025】
自動車1,2を連結する際のアシストを運転者に対して行うために、自動車1の後部側に多数の小受光部を水平配置した光検出部161を設けておき、自動車2の後部側に上記光検出部161と同じ高さで図示しないレーザー発光部を設けておいてもよい。そして、自動車1の運転席のパネルに、連結する時の自動車1,2の左右の位置ずれを表すためのモニタを設けておき、このモニタに上記レーザー発光部から出射されたレーザー光が上記光検出部161の中心からどの程度左右にずれているか(受光している小受光部が中心から何個目の受光部であるか)を表示することが考えられる。運転者は上記モニタの表示を見てバック運転でハンドルを操作し、自動車1の連結機構1aを自動車2の連結機構の2aの位置に正確に合わせることができる。なお、例えば、パワーステアリングの電動モータに操舵信号を与えて自動操縦できる構造とするとともに制御部16が上記光検出部161からの受光位置情報に基づいて上記操舵信号を生成することで、自動車連結の自動化を実現することも可能である。また、上記レーザー光を用いたアシストの他に、撮像カメラによる撮像画像情報や超音波による測距信号を用いて運転者へのアシスト情報(画像、案内音声等)を生成したり、上記の連結自動化のための操舵信号を生成することもできる。また、全車輪の操舵角度を90°とすることができる構造を採用する場合は、自動車の真横移動が可能となるので、自動車を連結する際の自動車1,2の左右方向のずれを簡単に解消することができ、連結作業が容易になる。
【0026】
次に、自動車1,2における連結走行の態様について説明していく。
(1)連結走行時には、自動車2のインホイールモータ駆動装置111への電力供給を停止する態様が考えられる。この電力供給停止を選択するための操作方法としては、自動車2において「連結走行−駆動停止」と標記されたモード選択ボタンを利用者が操作する方法の他、自動車1において「連結走行−駆動停止」と標記されたモード選択ボタンを利用者が操作すると、自動車1から自動車2へ、インホイールモータ駆動装置111への電力供給を停止させる制御信号を送信するといった方法などが考えられる。インホイールモータ駆動装置111への電力供給停止が適用される自動車2においては、そのインホイールモータ駆動装置111のモータ部と減速部との間に電動で操作されるクラッチ装置が設けられるのがよい。そして、この自動車2において「連結走行−駆動停止」のボタンが操作されたときや、自動車2が自動車1から上記制御信号を受信したときに、自動車2は上記クラッチ装置を作動させて後輪11の自由な回転を許容することとしてもよい。このように、自動車2において後輪11の自由な回転が許容されることで自動車1の走行負荷を軽減することができる。
【0027】
(2)連結走行時にも自動車2のインホイールモータ駆動装置111への電力供給を維持する態様もある。この電力供給維持を選択するための操作方法としては、自動車2において「連結走行−駆動維持」と標記されたモード選択ボタンを利用者が操作する方法の他、自動車1において「連結走行−駆動維持」と標記されたモード選択ボタンを利用者が操作すると、自動車1から自動車2へ、「連結走行−駆動維持」を示す信号を送信する方法が考えられる。このような「連結走行−駆動維持」が選択される場合には、自動車2のインホイールモータ駆動装置111に対する駆動制御信号を自動車1の側から送信する方法が考えられる。この駆動制御信号の送信例としては、例えば、自動車1のインバータ制御部131に供給される自動車1の左右の前輪回転数を示す情報を、インバータ制御部131又は制御部16によって自動車1から自動車2へ送信する方法が考えられる。この場合、自動車2の制御部16又はインバータ制御部131は、上記情報を受け取って自身のインホイールモータ駆動装置111の駆動を制御し、自動車2の後輪11を自動車1の後輪11と同じ回転数で回転させる。なお、この実施形態における後−後連結においては、自動車の前後関係が逆になるので、自動車2におけるインホイールモータ駆動装置111の回転方向を自動車1に対して逆転させるとともに、カーブ走行時には、自動車1の左後輪11と自動車2の右後輪11の回転数を同じとし、自動車1の右後輪11と自動車2の左後輪11の回転数が同じとなるように、左右のインホイールモータ駆動装置111を制御することになる。
【0028】
(3)上記の(1)及び(2)のどちらの場合にも適用できるが、自動車1のステアリング角度(操舵角度)の情報に基づいて自動車2の側でそのステアリング装置121を自動操作することも可能である。ステアリング装置121の自動操作は例えばパワーステアリングを構成する電動モータを制御することで実現できる。この実施形態における後−後連結においては、自動車1の前輪(連結自動車としての前輪)と自動車2の前輪(連結自動車としての後輪)の各々の操舵が可能であり、これは1台の連結自動車において四輪操舵が行える構成に相当することになるので、既存の四輪操舵に関連する操舵制御技術を自動車1,2の連結自動車において適用し、自動車連結状態で四輪操舵が行われる構成としてもよい。この四輪操舵の制御例としては、自動車1の制御部16が自動車2に対する操舵指示信号を生成し、この操舵指示信号を受信した自動車2の制御部16が自動車2のステアリングを操作することとしてもよいし、或いは、自動車1のステアリング角度情報や速度情報などを自動車2の制御部16が受信して自動車2の制御部16が自身のステアリングに対する操舵指示信号を生成することとしてもよい。
【0029】
(4)自動車1,2の連結走行においては、図5に示すように、後−前連結とすることも可能である。この後−前連結とする場合においても、自動車2のインホイールモータ駆動装置111への電力供給を停止する制御と、自動車2のインホイールモータ駆動装置111への電力供給を維持する制御とのいずれもが行える。この後−前連結の場合は自動車1と自動車2で車輪の左右逆転や逆回転は生じない。また、この後−前連結の場合において、非直線走行での自動車1のステアリング角度及び車輪回転数が、その時点の自動車1の位置に自動車2が到達した時に自動車2のステアリング及び車輪において実現されるように、上記自動車2への駆動制御信号を自動車1の側で遅延させて自動車2に送信する制御を行ったり、遅延せずに送信される上記駆動制御信号を自動車2が受信し、自動車2においてインバータ制御部131への供給タイミングを遅らせる制御を行うようにしてもよい。このような情報遅延や動作遅延は、自動車連結が固定連結とされる場合よりも、揺動可能な連結とされる場合に好適であると考えられる。なお、直進走行時(ステアリング角度が一定角度以内のとき)には、上記遅延を伴わずに加速制御や減速制御が行われる。
【0030】
(5)上記の後−前連結の場合、自動車1の後輪11を自由回転させる一方、自動車1から自動車2に送信されるステアリング角度情報やスロットル開度情報によって自動車2における後輪11を駆動制御することも考えられる。また、このように自動車2の後輪11を駆動する場合、自動車1の後輪11及び自動車2の前輪12を昇降機構により支持しておき、上記昇降機構により自動車1の後輪11及び自動車2の前輪12を上昇収納して路面から離間させ、四輪走行させることも可能である。また、二輪だけ上昇収納して六輪走行させることも可能である。路面に接する車輪数を減らすことで走行効率が向上することになる。
【0031】
(6)上記の後−前連結及び後−後連結のいずれにも適用できるが、各自動車1,2の四輪全てにインホイールモータ装置111を設けた場合、連結自動車では八輪駆動とすることもできるし、連結自動車における八輪中の二輪或いは四輪のインホイールモータ装置111への電力供給を停止して六輪駆動或いは四輪駆動とすることもできる。駆動輪の選択は自動車1の側から他の自動車に対して指令信号を送信することで行うこともできるし、各自動車において駆動輪選択ボタンを操作することで選択することも可能である。駆動輪として選択されずに電力供給が停止されるインホイールモータ装置111に関してはクラッチを作動させることで車輪の自由な回転を確保することができる。
【0032】
(7)上記の後−前連結及び後−後連結のいずれにも適用できるが、自動車1,2の走行用バッテリ132に接続される電源ラインに外部接続用のプラグとソケットを設けておき、自動車1,2間で上記プラグとソケットを接続することにより自動車1,2における二つの走行用バッテリ132が並列接続されるようにしてもよい。これにより、自動車1,2の走行用バッテリ132が自動車1,2で共用されることになるので、例えば、連結走行によって一方の自動車の走行用バッテリ132だけが消費されて両者の電池残量に差異が生じるといった事態を防止することができる。
【0033】
(8)上記の後−前連結及び後−後連結のいずれにも適用できるが、自動車1においてブレーキペダルが踏まれたときには、自動車1及び自動車2の双方において制動をかけることとするのがよい。また、ブレーキランプについては、後−前連結の場合、自動車2のブレーキランプも点灯させることとする。具体的には、自動車1のブレーキペダルが操作されたときに、そのことを示す信号が自動車1の制御部16から自動車2の制御部16に伝送され、この自動車2の制御部16が自動車2のブレーキランプを点灯させる。一方、後−後連結の場合、自動車2の前側が後方を向くことになるので、自動車2のフロント部にもブレーキランプを設けておき、自動車1においてブレーキペダルが踏まれたときに自動車2の前記フロント部に設けたブレーキランプを点灯させるのがよい。なお、バック走行時に点灯するバックランプについても同様にフロント部に設けることも考えられる。
【0034】
以上説明した実施例においては、車輪をインホイールモータ装置111によって駆動する構造を例示したが、このような構造に限るものではなく、図6又は図7に示すように、車体側に電動モータ112或いは113を搭載し、これら電動モータの出力を図示しない減速機及び等速ジョイント114によって車輪115に伝達する構造を採用してもよい。また上記減速機及びインホイールモータ装置111の減速部として遊星歯車減速機やサイクロイド減速機を採用することができる。また、自動車1,2として四輪車を示したが、三輪車或いは二輪車とすることもできる。二輪車同士を連結する場合には、前後ではなく横並びに連結する。二輪車のハンドル同士を棒状部材で連結すれば一方の自動車のハンドルの操作を他方の自動車のハンドルに伝達することができる。また、自動車1,2におけるブレーキ装置やステアリング装置121などについて、バイワイヤ機構を適用することもできる。
【0035】
以上、図面を参照してこの発明の実施形態を説明したが、この発明は、図示した実施形態のものに限定されない。図示した実施形態に対して、この発明と同一の範囲内において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。
【符号の説明】
【0036】
1,2 自動車
1a,2a 連結機構
11 後輪
12 前輪
14 バッテリ
16 制御部
101 ボルト
102 凸部
103 凹部
105 モータ
106 巻き取りローラ
107 ロープ
111 インホイールモータ装置
121 ステアリング装置
122 スロットル
123 センサ
124 センサ
125 センサ
126 センサ
131 インバータ制御部
132 走行用バッテリ
161 光検出部
【特許請求の範囲】
【請求項1】
独立走行するのに必要な要素を備えた複数の自動車が相互に連結及び離脱が行えるように構成されており、複数連結された自動車のうち一つの自動車を用いた運転操作によって連結走行が行われる連結自動車。
【請求項2】
上記自動車は車体に搭載した電動モータ又は車輪に組み込まれた電動モータを走行用バッテリにより駆動する自動車である請求項1に記載の連結自動車。
【請求項3】
各自動車に設けられた電源入出力部を相互に接続すると、自動車間で上記バッテリが並列に接続されて共用される請求項2に記載の連結自動車。
【請求項4】
上記複数の自動車は相互に信号の送受が行えるように構成されており、上記運転操作される自動車の走行状態情報又は当該運転操作される自動車から出力される走行制御指令が上記送受信部によって他の自動車に伝送され、上記走行状態情報又は走行制御指令に基づいて当該他の自動車がその独立走行するのに必要な要素に対して、操舵制御、制動制御及び走行速度制御の少なくとも一つを行う請求項1〜請求項3のいずれかに記載の連結自動車。
【請求項5】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記運転操作される自動車の車輪の回転制御に対して上記他の自動車の車輪の回転制御が正逆反転して行われる請求項4に記載の連結自動車。
【請求項6】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記他の自動車の前側にもブレーキランプが設けられており、上記運転操作される自動車のブレーキ操作によって上記他の自動車の前側のブレーキランプを点灯させる請求項4に記載の連結自動車。
【請求項7】
上記運転操作される自動車に対して他の自動車は正向きに連結される請求項1〜請求項4のいずれかに記載の連結自動車。
【請求項8】
連結された自動車の駆動輪以外の全部又は一部の車輪を路面から離間させる車輪収納機構を備え請求項1〜請求項7のいずれかに記載の連結自動車。
【請求項9】
連結された自動車の駆動輪以外の全部又は一部の車輪を自由回転させるクラッチ機構を備えた請求項1〜請求項7のいずれかに記載の連結自動車。
【請求項10】
各自動車は揺動不能に固定的に連結される請求項1〜請求項9のいずれかに記載の連結自動車。
【請求項11】
上記複数の自動車の室内空間を連通させる連通構造を有する請求項10に記載の連結自動車。
【請求項1】
独立走行するのに必要な要素を備えた複数の自動車が相互に連結及び離脱が行えるように構成されており、複数連結された自動車のうち一つの自動車を用いた運転操作によって連結走行が行われる連結自動車。
【請求項2】
上記自動車は車体に搭載した電動モータ又は車輪に組み込まれた電動モータを走行用バッテリにより駆動する自動車である請求項1に記載の連結自動車。
【請求項3】
各自動車に設けられた電源入出力部を相互に接続すると、自動車間で上記バッテリが並列に接続されて共用される請求項2に記載の連結自動車。
【請求項4】
上記複数の自動車は相互に信号の送受が行えるように構成されており、上記運転操作される自動車の走行状態情報又は当該運転操作される自動車から出力される走行制御指令が上記送受信部によって他の自動車に伝送され、上記走行状態情報又は走行制御指令に基づいて当該他の自動車がその独立走行するのに必要な要素に対して、操舵制御、制動制御及び走行速度制御の少なくとも一つを行う請求項1〜請求項3のいずれかに記載の連結自動車。
【請求項5】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記運転操作される自動車の車輪の回転制御に対して上記他の自動車の車輪の回転制御が正逆反転して行われる請求項4に記載の連結自動車。
【請求項6】
上記運転操作される自動車に対して他の自動車は逆向きに連結され、上記他の自動車の前側にもブレーキランプが設けられており、上記運転操作される自動車のブレーキ操作によって上記他の自動車の前側のブレーキランプを点灯させる請求項4に記載の連結自動車。
【請求項7】
上記運転操作される自動車に対して他の自動車は正向きに連結される請求項1〜請求項4のいずれかに記載の連結自動車。
【請求項8】
連結された自動車の駆動輪以外の全部又は一部の車輪を路面から離間させる車輪収納機構を備え請求項1〜請求項7のいずれかに記載の連結自動車。
【請求項9】
連結された自動車の駆動輪以外の全部又は一部の車輪を自由回転させるクラッチ機構を備えた請求項1〜請求項7のいずれかに記載の連結自動車。
【請求項10】
各自動車は揺動不能に固定的に連結される請求項1〜請求項9のいずれかに記載の連結自動車。
【請求項11】
上記複数の自動車の室内空間を連通させる連通構造を有する請求項10に記載の連結自動車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−105514(P2012−105514A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−254396(P2010−254396)
【出願日】平成22年11月15日(2010.11.15)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月15日(2010.11.15)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]