
連結車両の挙動制御装置
【課題】スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供すること。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の車両の挙動制御装置に係り、より詳細には、トラクタがトレーラを牽引する形式の連結車両に於けるスウェイ状態(スネーキング運動、トレーラの振り子運動とも称される。)の抑制のための挙動制御装置に係る。
【背景技術】
【0002】
フルトレーラ又はセミトレーラの形式の連結車両では、一般に、トラクタに牽引されるトレーラが、トラクタの後部に設けられたピン又はカプラにより枢動可能に連結されている。このような形式の連結車両の走行中に於いて、急操舵、車速過大、横風或いは積載物の配分の不均衡等の種々の要因により、トレーラの「スウェイ状態」、即ち、トレーラがトラクタに対してピン又はカプラ(枢動軸)周りにヨー方向に揺動又は振動した状態、が惹起されることがある(図2(A)参照)。かかるトレーラのスウェイ状態が発生すると、トラクタもヨー方向に振動することとなり、車両挙動が不安定となる。そこで、そのようなスウェイ状態の抑制のための車両挙動安定化制御装置が種々提案され、実用化されている。例えば、特許文献1に於いては、トラクタとトレーラとの連結角(ヒッチ角)が所定角度に達するとトレーラブレーキを作動し、これにより、トレーラの制動力によってトレーラに於いてヒッチ角を低減する方向にヨーモーメントを発生する制御装置が開示されている。また、特許文献2は、スウェイ状態に於ける周波数帯域のヨーレート、車両の横加速度の大きさが所定値に達したか否かを監視することによりにスウェイ状態の発生を検出すること、そして、制動力配分制御によりヨーレート及び/又は横加速度の位相と逆位相のヨーモーメントを生成することによりスウェイ状態を抑制することを開示している。
【特許文献1】特開平10−236289号公報
【特許文献2】国際公開2001/002227
【発明の概要】
【発明が解決しようとする課題】
【0003】
上記の如く、車両のヨー方向の振動的な運動を抑制して車両の挙動の安定化を図るためのヨーモーメント(アンチヨーモーメント)は、一般的には、トラクタ及び/又はトレーラに於ける各輪へ適当な配分にて制動力を付与することにより発生される。従って、かかる制御には、制動力の付与による車両の減速が伴うこととなり、これにより、運転者が違和感を覚えたり、或いは、交通量の多い道路では、後続の車両に減速を強いることがある。そのような運転者の違和感や後続車両への影響は、特に車両の不安定挙動が然程に大きくない場合或いは挙動安定化の緊急性が然程に高くない場合には、回避できる方が好ましい。
【0004】
かくして、本発明の一つの課題は、スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供することである。
【課題を解決するための手段】
【0005】
上記の課題は、トラクタと該トラクタにより牽引されるトレーラとを含む連結車両のスウェイ状態を抑制するための挙動制御装置であって、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動輪に駆動力を付与することを特徴とする装置によって達成される。
【0006】
上記の如く、連結車両に於いて、スウェイ状態を抑制し車両の安定化を図るべくアンチヨーモーメントを発生させる際には、トラクタ又はトレーラの車輪に制動力を付与するために、車両が減速され、運転者の違和感や後続車両への影響が生じ得る。そこで、本発明では、アンチヨーモーメントの生成、即ち、制動力配分制御と伴に、制動力配分制御によって生ずる減速量に基づいて車両の駆動輪に駆動力が付与され、制動力配分制御による車両の減速の程度に応じてその緩和が図られる。そして、かかる車両の減速の緩和によって、運転者の違和感や後続車両への影響を低減することが試みられる。
【0007】
上記に於いて、車両の減速の緩和は、制動力配分制御によって生ずる減速量に基づいて任意に実行されてよいところ、例えば、一つの態様として、アンチヨーモーメントを実質的に変更せずに車両の減速量を低減又は相殺するよう駆動力が決定され付与されるようになっていてよい。しかしながら、そもそも、スウェイ状態が発生する状況では、車速が比較的高くなっている場合も有り得るので、制動力を完全に相殺するのではなく、或る程度の車両の減速が許されるようになっていてもよい。また、制動力配分制御に於いて、アンチヨーモーメントを生成する制動力は、トラクタの車輪に配分されるようになっていてもよく(この場合、トラクタに於いて、制動力左右差が生ずるよう制動力が配分される。)、また、トレーラの車輪に配分されるようになっていてもよい(この場合、トレーラの左右輪の両方に制動力が配分され、トレーラをトラクタに対して相対的に後方へ下げることにより、トレーラのヒッチ角を低減するアンチヨーモーメントが生成される。)。更に、制動力配分制御による車両の減速量は、アンチヨーモーメントを生成する制動力の関数であり、かかる制動力は、トラクタの挙動状態量(スウェイ状態か否かを示す任意の指標値)の関数であるので、上記の車両の駆動輪に付与される駆動力は、トラクタの挙動状態量に基づいて決定され、付与されるようになっていてよい。
【0008】
また、上記の本発明の装置に於いて、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される前記の駆動力は、路面勾配又は路面摩擦状態(路面摩擦係数)を考慮して決定されるようになっていてよい。よく知られているように、車両挙動は、路面勾配又は路面摩擦状態に依存して不安定化し易くなり得る。その場合には、車速を維持して運転者の違和感等を回避するよりも車両を減速して車両挙動の安定化を図る方が好ましい。従って、アンチヨーモーメント生成に伴う車両の減速に対抗して付与される駆動力は、路面勾配又は路面摩擦係数基づいて決定されるようになっていてよい。具体的には、車両が所定角度より大きい路面勾配を降下しているとき、或いは、所定の値より低い路面摩擦係数を有する路面を走行しているときには、つまり、降坂路又は低μ路走行中の車両に於いては、前記の駆動力の付与を実行しないようになっていてよい。
【0009】
なお、本発明の特徴とするところのアンチヨーモーメント生成に伴う車両の減速に対抗する駆動力付与は、主として、車両挙動の不安定化が比較的小さい場合のアンチヨーモーメント生成の際に適用されるようになっていてよい。車両挙動の不安定化が比較的大きくなっている場合には、スウェイ状態の抑制のために車両の減速も意図的に実行される。本発明による駆動力付与は、かかる意図的な減速に抗して実行されるべきではない。また、実施の形態に於いて、駆動力制御は、制駆動システムの応答遅れ(制動力又は駆動力の発生要求が出されてから車両の制動力又は駆動力の実際の発生が始まるまでの遅れ時間)が考慮されて実行されるようになっていてよい。
【発明の効果】
【0010】
かくして、上記の本発明の装置によれば、連結車両に於いてスウェイ状態を抑制するための挙動制御による制動作用が駆動力付与によって低減又は相殺され、これにより、スウェイ抑制制御中の車両の減速が緩和又は回避され、車両の減速により惹起され得る運転者の違和感や後続車両への影響を少なくすることが可能となる。本発明の制御は、フルトレーラ、セミトレーラ、キャンピングトレーラなど、スウェイ状態の発生し得る任意の形式のトレーラに於いて実現されてよい。
【0011】
本発明のその他の目的及び利点は、以下に於いて、部分的に明らかになり、指摘される。
【図面の簡単な説明】
【0012】
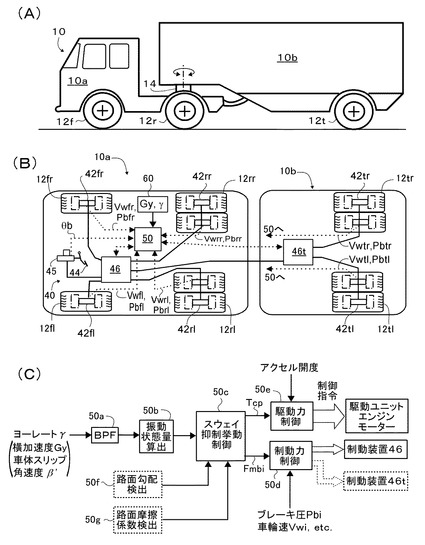
【図1】図1(A)は、本発明の好ましい実施形態であるスウェイ状態の抑制のための挙動制御装置が搭載される車両の模式的な側面図である。図1(B)は、車両の制動系装置とその制御を行う電子制御装置の信号の流れを表す車両の模式的な平面図である。図1(C)は、本発明の好ましい実施形態である挙動制御装置の内部構成を制御ブロックの形式で表したものである。
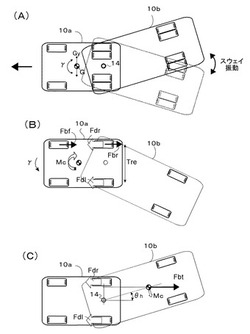
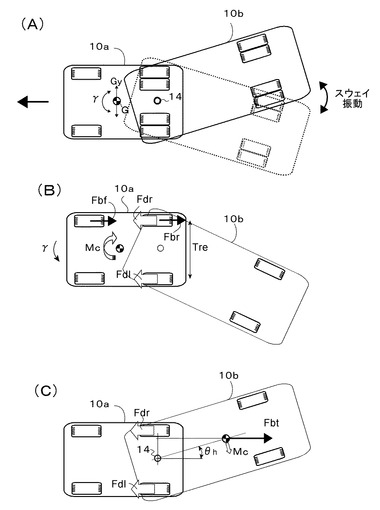
【図2】図2(A)は、スウェイ状態にある車両の模式的な平面図である。図2(B)は、トラクタに制動力配分制御によりアンチヨーモーメントMcを発生させてスウェイ状態を抑制する場合に於ける車両に発生される制駆動力(矢印)を模式的に示した図である。図2(C)は、トレーラに制動力を付与してスウェイ状態を抑制する場合に於ける車両に発生される制駆動力(矢印)とこれにより生成されるアンチヨーモーメントMcを模式的に示した図である。
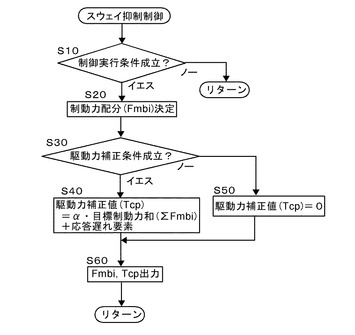
【図3】図3は、本発明の挙動制御装置のスウェイ抑制挙動制御部に於ける処理の流れをフローチャートの形式で表したものである。
【符号の説明】
【0013】
10…車両
10a…トラクタ
10b…トレーラ
12fl、fr…トラクタ前輪
12rl、rr…トラクタ後輪
12tl、tr…トレーラ車輪
14…連結ピン
40…制動系装置
42fl、fr、rl、rr、tl、tr…ホイールシリンダ
44…ブレーキペダル
45…ブレーキバルブ又はマスタシリンダ
46…流体圧回路(トラクタ)
46t…流体圧回路(トレーラ)
50…電子制御装置
60…横加速度センサ、ヨーレートセンサ
【発明を実施するための最良の形態】
【0014】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施形態について詳細に説明する。図中、同一の符号は、同一の部位を示す。
【0015】
装置の構成
図1(A)は、本発明によるスウェイ状態を抑制するための挙動制御装置の好ましい実施形態が搭載される車両10を概略的に示している。車両10は、例えば、任意の形式のセミトレーラ型の連結車両、即ち、一対の前輪12f及び一対の後輪12rを有するトラクタ10aと、トラクタ10aの後部に設けられた連結ピン14にて図中の矢印の方向に枢動可能に連結された一対の車輪12tを有するトレーラ10bとから成る連結車両であってよい。トラクタ10aには、通常の態様にて、運転者によるアクセルペダルの踏込みに応じて各輪(図示の例では、後輪駆動車であるから、後輪のみ)に制駆動力を発生する駆動系装置(図示せず)と、前輪の舵角を制御するためのステアリング装置(図示せず)と、図1(B)に模式的に示されている如き各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置は、通常の態様にて、エンジン及び/又は電動機から、変速機、差動歯車装置等を介して、駆動トルク或いは回転力がトラクタ後輪へ伝達されるよう構成されている。なお、図では、車両は、一つの例として、セミトレーラ型のトラックとして描かれているが、本発明の挙動制御装置は、トラクタとトレーラとが互い枢動可能に連結され、従って、スウェイ状態が発生し得る任意の形式のトラック(フルトレーラ型であってもよい。)、バス等の車両に適用されてよく、そのような場合も本発明の範囲に属することは理解されるべきである。
【0016】
連結車両10の制動系装置40は、各輪の制動力を独立に制御することのできる任意の形式の制動系装置、例えば、電子制御式の空気圧式制動系装置、空気・油圧式(複合式)制動系装置又は油圧式制動系装置であってよい。制動系装置40は、トラクタ10aの制動のために、トラクタ10aの前輪12fl、fr及び後輪12rl、rrに装備をされたホイールシリンダ42fl、fr、rl、rr内のブレーキ圧、即ち、トラクタ各輪の制動力、を調節する流体圧回路46を含む。トラクタ10aの流体圧回路46には、通常の態様にて、各輪のホイールシリンダを、選択的に、エアコンプレッサ、エアタンク、制動力倍力装置、オイルポンプ、オイルリザーバ等(図示せず)へ連通する種々の弁(モジュレータ、流体圧保持弁、減圧弁等)が設けられ、通常の制動作動に於いては、運転者によるブレーキペダル44の踏込みに応答してブレーキバルブ(又はマスタシリンダ)45が作動し、エアタンク、制動倍力装置又はマスタシリンダの圧力がそれぞれのホイールシリンダ42i(i=fl、fr、rl、rr、tl、tr 以下同様)へ供給され、各輪に一斉に制動力が発生される。しかしながら、ABS制御、VSC等の運動制御、本発明の挙動制御装置によるスウェイ状態を防止又は回避するための制御(スウェイ状態抑制挙動制御)又はその他の任意の制動力配分制御を実行するべく、各輪の制動力を個別に又は独立に調節する場合には、電子制御装置50の指令に基づいて、前記の種々の弁が作動され、各輪のホイールシリンダ内のブレーキ圧がそれぞれの目標圧に合致するよう個別に制御される。
【0017】
また、任意に、トレーラ10bの各輪を制動するための制動系装置が設けられていてよい。トレーラ10bの制動系装置には、例えば、トレーラ10bのトレーラ車輪12tl、trに装備をされたホイールシリンダ42tl、tr内のブレーキ圧、即ち、トレーラ各輪の制動力、を調節する流体圧回路46tとトレーラ10bの流体圧回路46tへ流体圧を伝達するブレーキ管とトラクタ10aの流体圧回路46からの流体圧を、電子制御装置50の指令に基づいて、選択的にトレーラ車輪のホイールシリンダへ与える種々の弁(モジュレータ、流体圧保持弁、減圧弁等)とが設けられる。なお、トレーラ10bの制動系装置は、電磁式、慣性式の制動系装置であってもよい。
【0018】
連結車両の制駆動を制御する電子制御装置50は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。電子制御装置50には、アクセルペダル(図示せず)からのアクセルペダル踏込量(アクセル開度)、ブレーキペダル44に設けられた踏込量センサ(図示せず)からのブレーキペダル踏込量θb、各輪に設けられた車輪速センサ(図示せず)からの車輪速度Vwi、ホイールシリンダ圧力センサからの各輪のホイールシリンダ内の圧力Pbi、トラクタに設けられた横Gセンサ及びヨーレートセンサ60からの横加速度Gy及びヨーレートγ等の検出値が入力される。なお、図示されているものの他、前後加速度等の本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータの値を表す各種検出信号が入力されてよい。(ブレーキペダル踏込量センサ及び/又は各輪ホイールシリンダ圧力センサは設けられていなくてもよい。)
【0019】
図1(C)は、電子制御装置50に組み込まれる本発明のスウェイ状態抑制のための挙動制御装置をブロック図の形式にて表したものである。同図を参照して、本発明の挙動制御装置に於いては、端的に述べれば、バンドパスフィルター(BPF)50aによりヨーレートセンサにより検出されたヨーレートγ、横Gセンサにより検出された横加速度Gy及び/又は車体スリップ角速度β’(β’=Gy/V−γにより算出される。)からそのスウェイ振動の周波数帯域の成分が抽出され、振動状態量算出部50bに於いて、スウェイ状態発生の指標値となり得る任意のパラメータ(振動状態量又は挙動状態量)が算出される。そして、振動状態量は、スウェイ抑制挙動制御部50cに与えられ、そこに於いて、後に詳細に説明される処理に従って、スウェイ状態を抑制するためのアンチヨーモーメント(ヨーレートの振動に対して逆位相に発生するヨーモーメント)又は制動力の目標値(車両の減速量)が決定され、アンチヨーモーメント又は目標制動力を達成するための各輪制動力の目標値Fmbiが決定される(制動力配分制御)。また、特に本発明に於いては、スウェイ状態抑制挙動制御のために発生する車両の減速を緩和又は相殺するために、かかる車両の減速量に基づいて車両に付与される駆動力又は駆動トルクの補正値Tcpも決定される。なお、スウェイ抑制挙動制御部50cには、駆動力又は駆動トルクの補正の要否を判定する目的で、図中、点線にて示されている如く、路面勾配検出部50fからの路面勾配の情報、路面摩擦係数検出部50gからの路面摩擦状態の情報等が任意に入力されるようになっていてよい。
【0020】
かくして決定された各輪制動力目標値Fmbiと駆動力若しくはトルクの補正値Tcpとは、それぞれ、制動力制御部50dと駆動力制御部50eとへ送られる。そして、制動力制御部50dは、各輪のブレーキ圧Pbi又は発生制動力(各輪ブレーキ圧、発生制動力は、任意の手法による推定値であってもよい。)、車輪速Vwiを参照しながら、トラクタ制動装置(流体圧回路46)及び/又はトレーラ制動装置(流体圧回路46t)に対して各輪制動力目標値Fmbiを達成する制御指令を発する(ブレーキ圧又は制動力の調節制御は、フィードバック制御、オープンループ制御(フィードフォワード制御)のいずれであってもよい。)。他方、駆動力制御部50eは、運転者のアクセルペダルの踏込量に対応する運転者要求駆動力又は運転者要求駆動トルクや、定速走行装置等の自動的に車両の駆動力若しくは前後加速度を調節する装置からの要求駆動力又は要求駆動トルクに前記の駆動力若しくはトルクの補正値Tcpを付加して成る駆動力又はトルクの目標値を達成するよう駆動力駆動ユニット(エンジン及び/又はモーター)に対して制御指令を与える。なお、上記の各部50a〜gは、電子制御装置50内のメモリ等の記憶装置に予め記憶されたプログラムに従ったCPU及びその他の要素の処理作動により実現されることは理解されるべきである。
【0021】
装置の原理
図1(A)に例示されている如き連結車両10の走行中に於いては、急操舵、車速過大、横風或いは積載物の配分の不均衡等の種々の要因によって、図2(A)に例示されている如く、トレーラ10bが、トラクタ10aの連結ピン14を支点として、ヨー方向に振り子の如く揺動若しくは振動する状態となる場合がある(スウェイ振動)。かかるトレーラのスウェイ振動は、トラクタ10aの連成振動を惹起し、トラクタ10aのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’の振幅が増大し、車両の安定性が悪化することとなる。そこで、一般に、スウェイ状態抑制挙動制御装置に於いては、ヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅を監視し、かかる振幅が増大したときには、図2(B)に例示されている如く、トラクタの左右輪のうちの一方に制動力Fbf、Fbrを付与し、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’の振動を抑制する方向へ、即ち、それらの振動と逆位相にアンチヨーモーメントMcを発生するか(引用文献2参照)、図2(C)に例示されている如く、トレーラ10bに制動力Fbtを与え、これにより、連結ピン14周りのヒッチ角θhが減少する方向にアンチヨーモーメントMc発生することにより(引用文献1参照)、スウェイ状態の抑制が図られる。
【0022】
しかしながら、かかるいずれかのスウェイ状態抑制のための挙動制御が実行されると、車両全体が減速されることとなり、「発明の概要」の欄にて述べたように、運転者が違和感を覚えたり、或いは、交通量の多い道路では、後続の車両に減速を強いることがある。そのような運転者の違和感や後続の車両への影響は、特に車両の不安定挙動が然程に大きくない場合或いは挙動安定化の緊急性が然程に高くない場合には、回避できることが好ましい。そこで、本発明の挙動制御装置に於いては、車両挙動の不安定化が然程に進んでいない場合、挙動安定化の緊急性が然程に高くない場合又は車両挙動の不安定化が進むおそれが少ない場合に於いて、図2(B)、(C)の白抜き矢印の如く、スウェイ状態抑制のためのアンチヨーモーメントMcの作用に変化がないように且つ車両に生ずる減速量又は制動力を相殺する方向に(車両の進行方向の力を補填する方向に)車両に駆動力又は駆動トルクFdr、Fdlを付与し、これにより、上記の如き運転者の違和感や後続の車両への影響を緩和することが図られる。以下、かかる本発明による挙動制御の作動についてより詳細に説明する。
【0023】
装置の作動
本発明の挙動制御の特徴的な構成は、スウェイ抑制挙動制御部50cに於ける図3に例示のフローチャートに従った制御処理により実現されるようになっていてよい。なお、図示の制御処理は、車両の走行中、所定のサイクルにて繰り返し実行される。
【0024】
図3を参照して、スウェイ抑制挙動制御部50cでは、まず、振動状態量算出部50bの出力値が参照され、スウェイ状態抑制のための挙動制御の要否が判定される(ステップ10)。具体的には、例えば、車速(車輪速値から任意の手法で決定されてよい。)が所定の速度を超えており、且つ、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅が所定の閾値を越えたとき(或いはその状態が所定時間に亙って継続したとき)に、制御実行条件が成立したと判定され、これにより、スウェイ状態抑制のための挙動制御の実行が決定されるようになっていてよい。制御実行条件が成立していないときには、そのサイクルの制御が終了される(リターン)。
【0025】
ステップ10に於いて、制御実行条件が成立したと判定されたときには、ステップ20に於いて、制動力配分が決定される。かかる制動力配分に於いて、図2(B)に例示されている如く、トラクタに於いてアンチヨーモーメントを発生させる場合には、車両の前後加速度、ピッチ角等の値から任意の手法にてトラクタの重心位置又は前後重量配分を検出した後、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の値(挙動状態量)に基づいて任意の手法(例えば、引用文献2参照)にて発生されるべきアンチヨーモーメントMcが決定され、かかるアンチヨーモーメントを達成する各輪の制動力Fmbiの目標値が決定される。なお、アンチヨーモーメントMcを発生させる制動力は、図2(B)に示されている如く、片側の前後輪の双方に分散して付加されてもよく、或いは、非駆動輪(前輪)のみにより付加されてもよい。他方、図2(C)に例示されている如く、トレーラのみに制動力を付加してトレーラを減速させてトレーラのヒッチ角θhを低減する場合には、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の値に基づいて任意の手法(例えば、引用文献1参照)にてトレーラに於いて発生されるべき制動力Fbtが決定され、トレーラの両輪に配分されるべき各輪制動力Fmbiが決定される(トレーラ両輪に付与される制動力は、左右均等であってもよいが、左右差を付けられる場合には、ヒッチ角が低減する方向にトレーラにヨーモーメントが生ずるよう配分されてもよい。)。
【0026】
かくして、制動力配分が決定されると、かかる制動力により生ずる車両の減速を緩和又は相殺するための駆動力の付加補正を実行するか否かの判定が行われる(ステップ30)。既に触れた通り、本発明によるスウェイ状態抑制挙動制御中の駆動力付加補正は、車両挙動の不安定化が然程に進んでいない場合、挙動安定化の緊急性が然程に高くない場合又は挙動の不安定化の進むおそれの少ない場合に実行される(車両挙動の不安定化が進んでいる場合、挙動安定化の緊急性が高い場合又はそのようなおそれが高い場合には、車両の減速による車両挙動の迅速な安定化が好ましいので、駆動力付加補正は実行されない。)。そこで、現在の車両挙動又は走行状態を参照して駆動力付加補正をするか否かが判定されるようになっていてよい。
【0027】
具体的には、下記の条件が成立すると判断されるとき、駆動力付加補正が実行されるようになっていてよい。
(a)トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅又はスウェイ状態の程度を表す任意の指標値(振動状態量又は挙動状態量)が、所定の大きさを超えていないとき。
−上記の成分の振幅が所定の大きさを超えているときは、車両挙動の不安定化が相当に進んでおり、挙動安定化の緊急性が高いと想定されるため、車両の減速が優先され、駆動力付加補正は実行されない。
(b)所定の角度を超える路面勾配角度を有する路面を降坂走行していないとき。
−降坂走行中は、車両挙動が不安定化されやすいため、車両の減速が優先され、駆動力付加補正は実行されない。路面勾配角度及び車両の向きは、路面勾配検出部50fに於いて前後Gセンサの検出値及び車輪速微分値(車輪速加速度値)等を比較するなどして任意の手法で決定されてよい。所定の角度は、路面勾配角度が有意に大きいと判断される角度であり、実験的に又は理論的に任意に設定されてよい(所定の角度は、車速又は振動状態量に依存して変更されるようになっていてよい。)。
(c)路面摩擦係数が所定の閾値を超えているとき。
−路面摩擦係数が所定の閾値を超えていない低摩擦路面上では、車両挙動が不安定化されやすいため、車両の減速が優先され、駆動力付加補正は実行されない。路面摩擦係数は、路面摩擦係数検出部50gに於いて、前後Gセンサの検出値及び車輪速微分値(車輪速加速度値)等を比較するなどして任意の手法で決定されてよい。路面摩擦係数に対する所定の閾値は、路面摩擦係数が有意に低いと判断される値であり、実験的に又は理論的に任意に設定されてよい。
なお、上記の条件(b)又は(c)の判定は、省略されてもよい。その場合、路面勾配検出部50f又は路面摩擦係数検出部50gは設けられなくてよい。
【0028】
ステップ30に於いて上記の条件(a)〜(c)のいずれかが成立していないときは、駆動力付加補正は実行されず、駆動力補正値は0に設定される(ステップ50)。
【0029】
一方、ステップ30に於いて上記の条件(a)〜(c)が成立しているときには、ステップ40に於いて、駆動輪に付加されるべき駆動力補正値Tcp[N](=Fdr+Fdl)が、下記の式により算出される。
Tcp[N]=α・ΣFmbi[N]+(応答遅れ要素)…(1)
ここに於いて、ΣFmbiは、ステップ20にて決定されたスウェイ抑制挙動制御により付加される制動力Fmbiの総和、即ち、車両に生ずる減速量に対応する量であり、αは、任意に設定されてよい係数である。α=1のとき、スウェイ抑制挙動制御により生ずる減速量は、駆動力補正により実質的に相殺されることとなる。また、かかるαを1未満の任意値に設定することにより、スウェイ抑制挙動制御により生ずる減速量の一部を相殺する、即ち、車両の減速を任意の程度にて緩和することが可能となる。応答遅れ要素とは、本制御装置が制動力を要求する制御指令を出力してから実際に車両に制動力(減速力)が作用するまでの遅れと、本制御装置が駆動力を要求する制御指令を出力してから実際に車両に駆動力が作用するまでの遅れとの和である(前者の遅れは、ブレーキパッドとローターとのクリアランス、サスペンション剛性(車輪に生じた力が車体に伝達するまでの速さを決定)、トラクタ−トレーラ間の連結剛性(トレーラに生じた減速力がトラクタに伝達するまでの速さを決定)等に依存して実験的に又は理論的に設定されてよい量であり、後者の遅れは、エンジン又はモーターの作動遅れ、サスペンション剛性等に依存して実験的に又は理論的に設定されてよい量である。)なお、駆動力がエンジン又はモーターにて発生される駆動トルクの単位にて制御される場合には、発生されるべき駆動トルクの目標値Tcp[Nm]は、
Tcp[Nm]=α・ΣFmbi[N]・R[m]/Rdiff+(応答遅れ要素)…(2)
により与えられてよい。ここで、R[m]は、タイヤ動荷重半径であり、Rdiffは、デフギヤ比である。
【0030】
上記の如く各輪制動力Fmbiと駆動力補正値Tcpが決定されると、それらの値は、それぞれ、制動力制御部50dと駆動力制御部50eへ送信される。制動力制御部50dでは、既に触れた如く、通常の態様にて、各輪制動力目標値Fmbiを達成するべく、制御指令が、トラクタ制動装置46及び/又はトレーラ制動装置46tに対して発せられ、アンチヨーモーメントMc又はトレーラの制動力Fbtが生成される。これと同時に、駆動力制御部50eでは、運転者のアクセルペダルの踏込量に対応するアクセル開度に基づくエンジン又はモーターに対する運転者要求駆動力又は駆動トルクTd1、或いは、任意の定速走行装置による要求に基づく定速走行装置要求駆動力又は駆動トルクTd2が決定され、かかる要求駆動力又は駆動トルクTd1、Td2へステップ40で決定された駆動力又は駆動トルク補正値Tcpが付加されて、最終的な駆動力又は駆動トルクの目標値が決定される。そして、最終的な駆動力又は駆動トルクの目標値を達成する制御指令がエンジン又はモーターの各部へ送信される。エンジン又はモーターに於いて生ずる駆動力又は駆動トルクは、原則的には、左右の駆動輪に実質的に均等に伝達され、これにより、アンチヨーモーメントMcの作用効果に変更を生ずることなく、制動力による車両の減速を緩和又は相殺することとなる。
【0031】
かくして、上記の本発明による挙動制御装置に於いては、トレーラのスウェイ状態が発生し、かかるスウェイ状態の抑制のための制動力配分による挙動制御が実行される際、条件(a)〜(c)が成立する車両挙動の不安定化が然程に進んでいない場合又は挙動安定化の緊急性が然程に高くない場合には、スウェイ状態抑制の挙動制御の作用効果を変えないように且つ挙動制御により車両に作用する制動力を相殺する方向に駆動力が付加されることにより、車両の減速の程度が低減され、運転者の違和感や後続の車両への影響が軽減されることが期待される。しかしながら、車両挙動の不安定化が進んでいる場合、挙動安定化の緊急性が高い場合或いは車両挙動が不安定化し易い走行状態下では、駆動力付加補正は実行されないようになっているので、そのような場合には、車両の減速が為され、車両挙動の安定化がより確実に図られることとなる。
【0032】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0033】
例えば、ステップ10、ステップ30の判定条件は、車両の形式、積載状態、走行状態等に応じて適宜修正されてよい。また、駆動力補正値の決定に於いて、駆動力補正値は、各輪に配分される制動力の目標値の関数であるところ、かかる制動力の目標値は、ヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分などの車両の挙動状態量の関数であるので、駆動力補正値は、直接に車両の挙動状態量に基づいて決定されてもよく、そのような場合も本発明の範囲に属することは理解されるべきである。更に、駆動系装置に於いて左右輪へ伝達される駆動トルクの配分比が可変である場合(所謂、可変トルク配分デフが装備されている場合)には、駆動輪に於いてスウェイ状態抑制のために配分される制動力の目標値から駆動力の目標値を差し引いた量の制駆動力が制動系装置又は駆動系装置により生成されるようになっていてよいことは理解されるべきである。その場合、各輪制動力と各輪駆動力とを総合してアンチヨーモーメントが生成されると共に、車両全体に作用する制駆動力が運転者又は定速走行装置の要求に合致するように各輪の制駆動力の配分が決定されるようになっていてよい(駆動力の一部がアンチヨーモーメントの生成に寄与することとなり得る。)。重要なことは、本発明による挙動制御装置に於いては、従前では、専ら制動力配分制御により実施されたスウェイ状態抑制制御に於いて駆動力の生成又は配分を実行し、車両が無用に減速されないようにするということである。
【技術分野】
【0001】
本発明は、自動車等の車両の挙動制御装置に係り、より詳細には、トラクタがトレーラを牽引する形式の連結車両に於けるスウェイ状態(スネーキング運動、トレーラの振り子運動とも称される。)の抑制のための挙動制御装置に係る。
【背景技術】
【0002】
フルトレーラ又はセミトレーラの形式の連結車両では、一般に、トラクタに牽引されるトレーラが、トラクタの後部に設けられたピン又はカプラにより枢動可能に連結されている。このような形式の連結車両の走行中に於いて、急操舵、車速過大、横風或いは積載物の配分の不均衡等の種々の要因により、トレーラの「スウェイ状態」、即ち、トレーラがトラクタに対してピン又はカプラ(枢動軸)周りにヨー方向に揺動又は振動した状態、が惹起されることがある(図2(A)参照)。かかるトレーラのスウェイ状態が発生すると、トラクタもヨー方向に振動することとなり、車両挙動が不安定となる。そこで、そのようなスウェイ状態の抑制のための車両挙動安定化制御装置が種々提案され、実用化されている。例えば、特許文献1に於いては、トラクタとトレーラとの連結角(ヒッチ角)が所定角度に達するとトレーラブレーキを作動し、これにより、トレーラの制動力によってトレーラに於いてヒッチ角を低減する方向にヨーモーメントを発生する制御装置が開示されている。また、特許文献2は、スウェイ状態に於ける周波数帯域のヨーレート、車両の横加速度の大きさが所定値に達したか否かを監視することによりにスウェイ状態の発生を検出すること、そして、制動力配分制御によりヨーレート及び/又は横加速度の位相と逆位相のヨーモーメントを生成することによりスウェイ状態を抑制することを開示している。
【特許文献1】特開平10−236289号公報
【特許文献2】国際公開2001/002227
【発明の概要】
【発明が解決しようとする課題】
【0003】
上記の如く、車両のヨー方向の振動的な運動を抑制して車両の挙動の安定化を図るためのヨーモーメント(アンチヨーモーメント)は、一般的には、トラクタ及び/又はトレーラに於ける各輪へ適当な配分にて制動力を付与することにより発生される。従って、かかる制御には、制動力の付与による車両の減速が伴うこととなり、これにより、運転者が違和感を覚えたり、或いは、交通量の多い道路では、後続の車両に減速を強いることがある。そのような運転者の違和感や後続車両への影響は、特に車両の不安定挙動が然程に大きくない場合或いは挙動安定化の緊急性が然程に高くない場合には、回避できる方が好ましい。
【0004】
かくして、本発明の一つの課題は、スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供することである。
【課題を解決するための手段】
【0005】
上記の課題は、トラクタと該トラクタにより牽引されるトレーラとを含む連結車両のスウェイ状態を抑制するための挙動制御装置であって、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動輪に駆動力を付与することを特徴とする装置によって達成される。
【0006】
上記の如く、連結車両に於いて、スウェイ状態を抑制し車両の安定化を図るべくアンチヨーモーメントを発生させる際には、トラクタ又はトレーラの車輪に制動力を付与するために、車両が減速され、運転者の違和感や後続車両への影響が生じ得る。そこで、本発明では、アンチヨーモーメントの生成、即ち、制動力配分制御と伴に、制動力配分制御によって生ずる減速量に基づいて車両の駆動輪に駆動力が付与され、制動力配分制御による車両の減速の程度に応じてその緩和が図られる。そして、かかる車両の減速の緩和によって、運転者の違和感や後続車両への影響を低減することが試みられる。
【0007】
上記に於いて、車両の減速の緩和は、制動力配分制御によって生ずる減速量に基づいて任意に実行されてよいところ、例えば、一つの態様として、アンチヨーモーメントを実質的に変更せずに車両の減速量を低減又は相殺するよう駆動力が決定され付与されるようになっていてよい。しかしながら、そもそも、スウェイ状態が発生する状況では、車速が比較的高くなっている場合も有り得るので、制動力を完全に相殺するのではなく、或る程度の車両の減速が許されるようになっていてもよい。また、制動力配分制御に於いて、アンチヨーモーメントを生成する制動力は、トラクタの車輪に配分されるようになっていてもよく(この場合、トラクタに於いて、制動力左右差が生ずるよう制動力が配分される。)、また、トレーラの車輪に配分されるようになっていてもよい(この場合、トレーラの左右輪の両方に制動力が配分され、トレーラをトラクタに対して相対的に後方へ下げることにより、トレーラのヒッチ角を低減するアンチヨーモーメントが生成される。)。更に、制動力配分制御による車両の減速量は、アンチヨーモーメントを生成する制動力の関数であり、かかる制動力は、トラクタの挙動状態量(スウェイ状態か否かを示す任意の指標値)の関数であるので、上記の車両の駆動輪に付与される駆動力は、トラクタの挙動状態量に基づいて決定され、付与されるようになっていてよい。
【0008】
また、上記の本発明の装置に於いて、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される前記の駆動力は、路面勾配又は路面摩擦状態(路面摩擦係数)を考慮して決定されるようになっていてよい。よく知られているように、車両挙動は、路面勾配又は路面摩擦状態に依存して不安定化し易くなり得る。その場合には、車速を維持して運転者の違和感等を回避するよりも車両を減速して車両挙動の安定化を図る方が好ましい。従って、アンチヨーモーメント生成に伴う車両の減速に対抗して付与される駆動力は、路面勾配又は路面摩擦係数基づいて決定されるようになっていてよい。具体的には、車両が所定角度より大きい路面勾配を降下しているとき、或いは、所定の値より低い路面摩擦係数を有する路面を走行しているときには、つまり、降坂路又は低μ路走行中の車両に於いては、前記の駆動力の付与を実行しないようになっていてよい。
【0009】
なお、本発明の特徴とするところのアンチヨーモーメント生成に伴う車両の減速に対抗する駆動力付与は、主として、車両挙動の不安定化が比較的小さい場合のアンチヨーモーメント生成の際に適用されるようになっていてよい。車両挙動の不安定化が比較的大きくなっている場合には、スウェイ状態の抑制のために車両の減速も意図的に実行される。本発明による駆動力付与は、かかる意図的な減速に抗して実行されるべきではない。また、実施の形態に於いて、駆動力制御は、制駆動システムの応答遅れ(制動力又は駆動力の発生要求が出されてから車両の制動力又は駆動力の実際の発生が始まるまでの遅れ時間)が考慮されて実行されるようになっていてよい。
【発明の効果】
【0010】
かくして、上記の本発明の装置によれば、連結車両に於いてスウェイ状態を抑制するための挙動制御による制動作用が駆動力付与によって低減又は相殺され、これにより、スウェイ抑制制御中の車両の減速が緩和又は回避され、車両の減速により惹起され得る運転者の違和感や後続車両への影響を少なくすることが可能となる。本発明の制御は、フルトレーラ、セミトレーラ、キャンピングトレーラなど、スウェイ状態の発生し得る任意の形式のトレーラに於いて実現されてよい。
【0011】
本発明のその他の目的及び利点は、以下に於いて、部分的に明らかになり、指摘される。
【図面の簡単な説明】
【0012】
【図1】図1(A)は、本発明の好ましい実施形態であるスウェイ状態の抑制のための挙動制御装置が搭載される車両の模式的な側面図である。図1(B)は、車両の制動系装置とその制御を行う電子制御装置の信号の流れを表す車両の模式的な平面図である。図1(C)は、本発明の好ましい実施形態である挙動制御装置の内部構成を制御ブロックの形式で表したものである。
【図2】図2(A)は、スウェイ状態にある車両の模式的な平面図である。図2(B)は、トラクタに制動力配分制御によりアンチヨーモーメントMcを発生させてスウェイ状態を抑制する場合に於ける車両に発生される制駆動力(矢印)を模式的に示した図である。図2(C)は、トレーラに制動力を付与してスウェイ状態を抑制する場合に於ける車両に発生される制駆動力(矢印)とこれにより生成されるアンチヨーモーメントMcを模式的に示した図である。
【図3】図3は、本発明の挙動制御装置のスウェイ抑制挙動制御部に於ける処理の流れをフローチャートの形式で表したものである。
【符号の説明】
【0013】
10…車両
10a…トラクタ
10b…トレーラ
12fl、fr…トラクタ前輪
12rl、rr…トラクタ後輪
12tl、tr…トレーラ車輪
14…連結ピン
40…制動系装置
42fl、fr、rl、rr、tl、tr…ホイールシリンダ
44…ブレーキペダル
45…ブレーキバルブ又はマスタシリンダ
46…流体圧回路(トラクタ)
46t…流体圧回路(トレーラ)
50…電子制御装置
60…横加速度センサ、ヨーレートセンサ
【発明を実施するための最良の形態】
【0014】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施形態について詳細に説明する。図中、同一の符号は、同一の部位を示す。
【0015】
装置の構成
図1(A)は、本発明によるスウェイ状態を抑制するための挙動制御装置の好ましい実施形態が搭載される車両10を概略的に示している。車両10は、例えば、任意の形式のセミトレーラ型の連結車両、即ち、一対の前輪12f及び一対の後輪12rを有するトラクタ10aと、トラクタ10aの後部に設けられた連結ピン14にて図中の矢印の方向に枢動可能に連結された一対の車輪12tを有するトレーラ10bとから成る連結車両であってよい。トラクタ10aには、通常の態様にて、運転者によるアクセルペダルの踏込みに応じて各輪(図示の例では、後輪駆動車であるから、後輪のみ)に制駆動力を発生する駆動系装置(図示せず)と、前輪の舵角を制御するためのステアリング装置(図示せず)と、図1(B)に模式的に示されている如き各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置は、通常の態様にて、エンジン及び/又は電動機から、変速機、差動歯車装置等を介して、駆動トルク或いは回転力がトラクタ後輪へ伝達されるよう構成されている。なお、図では、車両は、一つの例として、セミトレーラ型のトラックとして描かれているが、本発明の挙動制御装置は、トラクタとトレーラとが互い枢動可能に連結され、従って、スウェイ状態が発生し得る任意の形式のトラック(フルトレーラ型であってもよい。)、バス等の車両に適用されてよく、そのような場合も本発明の範囲に属することは理解されるべきである。
【0016】
連結車両10の制動系装置40は、各輪の制動力を独立に制御することのできる任意の形式の制動系装置、例えば、電子制御式の空気圧式制動系装置、空気・油圧式(複合式)制動系装置又は油圧式制動系装置であってよい。制動系装置40は、トラクタ10aの制動のために、トラクタ10aの前輪12fl、fr及び後輪12rl、rrに装備をされたホイールシリンダ42fl、fr、rl、rr内のブレーキ圧、即ち、トラクタ各輪の制動力、を調節する流体圧回路46を含む。トラクタ10aの流体圧回路46には、通常の態様にて、各輪のホイールシリンダを、選択的に、エアコンプレッサ、エアタンク、制動力倍力装置、オイルポンプ、オイルリザーバ等(図示せず)へ連通する種々の弁(モジュレータ、流体圧保持弁、減圧弁等)が設けられ、通常の制動作動に於いては、運転者によるブレーキペダル44の踏込みに応答してブレーキバルブ(又はマスタシリンダ)45が作動し、エアタンク、制動倍力装置又はマスタシリンダの圧力がそれぞれのホイールシリンダ42i(i=fl、fr、rl、rr、tl、tr 以下同様)へ供給され、各輪に一斉に制動力が発生される。しかしながら、ABS制御、VSC等の運動制御、本発明の挙動制御装置によるスウェイ状態を防止又は回避するための制御(スウェイ状態抑制挙動制御)又はその他の任意の制動力配分制御を実行するべく、各輪の制動力を個別に又は独立に調節する場合には、電子制御装置50の指令に基づいて、前記の種々の弁が作動され、各輪のホイールシリンダ内のブレーキ圧がそれぞれの目標圧に合致するよう個別に制御される。
【0017】
また、任意に、トレーラ10bの各輪を制動するための制動系装置が設けられていてよい。トレーラ10bの制動系装置には、例えば、トレーラ10bのトレーラ車輪12tl、trに装備をされたホイールシリンダ42tl、tr内のブレーキ圧、即ち、トレーラ各輪の制動力、を調節する流体圧回路46tとトレーラ10bの流体圧回路46tへ流体圧を伝達するブレーキ管とトラクタ10aの流体圧回路46からの流体圧を、電子制御装置50の指令に基づいて、選択的にトレーラ車輪のホイールシリンダへ与える種々の弁(モジュレータ、流体圧保持弁、減圧弁等)とが設けられる。なお、トレーラ10bの制動系装置は、電磁式、慣性式の制動系装置であってもよい。
【0018】
連結車両の制駆動を制御する電子制御装置50は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。電子制御装置50には、アクセルペダル(図示せず)からのアクセルペダル踏込量(アクセル開度)、ブレーキペダル44に設けられた踏込量センサ(図示せず)からのブレーキペダル踏込量θb、各輪に設けられた車輪速センサ(図示せず)からの車輪速度Vwi、ホイールシリンダ圧力センサからの各輪のホイールシリンダ内の圧力Pbi、トラクタに設けられた横Gセンサ及びヨーレートセンサ60からの横加速度Gy及びヨーレートγ等の検出値が入力される。なお、図示されているものの他、前後加速度等の本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータの値を表す各種検出信号が入力されてよい。(ブレーキペダル踏込量センサ及び/又は各輪ホイールシリンダ圧力センサは設けられていなくてもよい。)
【0019】
図1(C)は、電子制御装置50に組み込まれる本発明のスウェイ状態抑制のための挙動制御装置をブロック図の形式にて表したものである。同図を参照して、本発明の挙動制御装置に於いては、端的に述べれば、バンドパスフィルター(BPF)50aによりヨーレートセンサにより検出されたヨーレートγ、横Gセンサにより検出された横加速度Gy及び/又は車体スリップ角速度β’(β’=Gy/V−γにより算出される。)からそのスウェイ振動の周波数帯域の成分が抽出され、振動状態量算出部50bに於いて、スウェイ状態発生の指標値となり得る任意のパラメータ(振動状態量又は挙動状態量)が算出される。そして、振動状態量は、スウェイ抑制挙動制御部50cに与えられ、そこに於いて、後に詳細に説明される処理に従って、スウェイ状態を抑制するためのアンチヨーモーメント(ヨーレートの振動に対して逆位相に発生するヨーモーメント)又は制動力の目標値(車両の減速量)が決定され、アンチヨーモーメント又は目標制動力を達成するための各輪制動力の目標値Fmbiが決定される(制動力配分制御)。また、特に本発明に於いては、スウェイ状態抑制挙動制御のために発生する車両の減速を緩和又は相殺するために、かかる車両の減速量に基づいて車両に付与される駆動力又は駆動トルクの補正値Tcpも決定される。なお、スウェイ抑制挙動制御部50cには、駆動力又は駆動トルクの補正の要否を判定する目的で、図中、点線にて示されている如く、路面勾配検出部50fからの路面勾配の情報、路面摩擦係数検出部50gからの路面摩擦状態の情報等が任意に入力されるようになっていてよい。
【0020】
かくして決定された各輪制動力目標値Fmbiと駆動力若しくはトルクの補正値Tcpとは、それぞれ、制動力制御部50dと駆動力制御部50eとへ送られる。そして、制動力制御部50dは、各輪のブレーキ圧Pbi又は発生制動力(各輪ブレーキ圧、発生制動力は、任意の手法による推定値であってもよい。)、車輪速Vwiを参照しながら、トラクタ制動装置(流体圧回路46)及び/又はトレーラ制動装置(流体圧回路46t)に対して各輪制動力目標値Fmbiを達成する制御指令を発する(ブレーキ圧又は制動力の調節制御は、フィードバック制御、オープンループ制御(フィードフォワード制御)のいずれであってもよい。)。他方、駆動力制御部50eは、運転者のアクセルペダルの踏込量に対応する運転者要求駆動力又は運転者要求駆動トルクや、定速走行装置等の自動的に車両の駆動力若しくは前後加速度を調節する装置からの要求駆動力又は要求駆動トルクに前記の駆動力若しくはトルクの補正値Tcpを付加して成る駆動力又はトルクの目標値を達成するよう駆動力駆動ユニット(エンジン及び/又はモーター)に対して制御指令を与える。なお、上記の各部50a〜gは、電子制御装置50内のメモリ等の記憶装置に予め記憶されたプログラムに従ったCPU及びその他の要素の処理作動により実現されることは理解されるべきである。
【0021】
装置の原理
図1(A)に例示されている如き連結車両10の走行中に於いては、急操舵、車速過大、横風或いは積載物の配分の不均衡等の種々の要因によって、図2(A)に例示されている如く、トレーラ10bが、トラクタ10aの連結ピン14を支点として、ヨー方向に振り子の如く揺動若しくは振動する状態となる場合がある(スウェイ振動)。かかるトレーラのスウェイ振動は、トラクタ10aの連成振動を惹起し、トラクタ10aのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’の振幅が増大し、車両の安定性が悪化することとなる。そこで、一般に、スウェイ状態抑制挙動制御装置に於いては、ヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅を監視し、かかる振幅が増大したときには、図2(B)に例示されている如く、トラクタの左右輪のうちの一方に制動力Fbf、Fbrを付与し、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’の振動を抑制する方向へ、即ち、それらの振動と逆位相にアンチヨーモーメントMcを発生するか(引用文献2参照)、図2(C)に例示されている如く、トレーラ10bに制動力Fbtを与え、これにより、連結ピン14周りのヒッチ角θhが減少する方向にアンチヨーモーメントMc発生することにより(引用文献1参照)、スウェイ状態の抑制が図られる。
【0022】
しかしながら、かかるいずれかのスウェイ状態抑制のための挙動制御が実行されると、車両全体が減速されることとなり、「発明の概要」の欄にて述べたように、運転者が違和感を覚えたり、或いは、交通量の多い道路では、後続の車両に減速を強いることがある。そのような運転者の違和感や後続の車両への影響は、特に車両の不安定挙動が然程に大きくない場合或いは挙動安定化の緊急性が然程に高くない場合には、回避できることが好ましい。そこで、本発明の挙動制御装置に於いては、車両挙動の不安定化が然程に進んでいない場合、挙動安定化の緊急性が然程に高くない場合又は車両挙動の不安定化が進むおそれが少ない場合に於いて、図2(B)、(C)の白抜き矢印の如く、スウェイ状態抑制のためのアンチヨーモーメントMcの作用に変化がないように且つ車両に生ずる減速量又は制動力を相殺する方向に(車両の進行方向の力を補填する方向に)車両に駆動力又は駆動トルクFdr、Fdlを付与し、これにより、上記の如き運転者の違和感や後続の車両への影響を緩和することが図られる。以下、かかる本発明による挙動制御の作動についてより詳細に説明する。
【0023】
装置の作動
本発明の挙動制御の特徴的な構成は、スウェイ抑制挙動制御部50cに於ける図3に例示のフローチャートに従った制御処理により実現されるようになっていてよい。なお、図示の制御処理は、車両の走行中、所定のサイクルにて繰り返し実行される。
【0024】
図3を参照して、スウェイ抑制挙動制御部50cでは、まず、振動状態量算出部50bの出力値が参照され、スウェイ状態抑制のための挙動制御の要否が判定される(ステップ10)。具体的には、例えば、車速(車輪速値から任意の手法で決定されてよい。)が所定の速度を超えており、且つ、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅が所定の閾値を越えたとき(或いはその状態が所定時間に亙って継続したとき)に、制御実行条件が成立したと判定され、これにより、スウェイ状態抑制のための挙動制御の実行が決定されるようになっていてよい。制御実行条件が成立していないときには、そのサイクルの制御が終了される(リターン)。
【0025】
ステップ10に於いて、制御実行条件が成立したと判定されたときには、ステップ20に於いて、制動力配分が決定される。かかる制動力配分に於いて、図2(B)に例示されている如く、トラクタに於いてアンチヨーモーメントを発生させる場合には、車両の前後加速度、ピッチ角等の値から任意の手法にてトラクタの重心位置又は前後重量配分を検出した後、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の値(挙動状態量)に基づいて任意の手法(例えば、引用文献2参照)にて発生されるべきアンチヨーモーメントMcが決定され、かかるアンチヨーモーメントを達成する各輪の制動力Fmbiの目標値が決定される。なお、アンチヨーモーメントMcを発生させる制動力は、図2(B)に示されている如く、片側の前後輪の双方に分散して付加されてもよく、或いは、非駆動輪(前輪)のみにより付加されてもよい。他方、図2(C)に例示されている如く、トレーラのみに制動力を付加してトレーラを減速させてトレーラのヒッチ角θhを低減する場合には、トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の値に基づいて任意の手法(例えば、引用文献1参照)にてトレーラに於いて発生されるべき制動力Fbtが決定され、トレーラの両輪に配分されるべき各輪制動力Fmbiが決定される(トレーラ両輪に付与される制動力は、左右均等であってもよいが、左右差を付けられる場合には、ヒッチ角が低減する方向にトレーラにヨーモーメントが生ずるよう配分されてもよい。)。
【0026】
かくして、制動力配分が決定されると、かかる制動力により生ずる車両の減速を緩和又は相殺するための駆動力の付加補正を実行するか否かの判定が行われる(ステップ30)。既に触れた通り、本発明によるスウェイ状態抑制挙動制御中の駆動力付加補正は、車両挙動の不安定化が然程に進んでいない場合、挙動安定化の緊急性が然程に高くない場合又は挙動の不安定化の進むおそれの少ない場合に実行される(車両挙動の不安定化が進んでいる場合、挙動安定化の緊急性が高い場合又はそのようなおそれが高い場合には、車両の減速による車両挙動の迅速な安定化が好ましいので、駆動力付加補正は実行されない。)。そこで、現在の車両挙動又は走行状態を参照して駆動力付加補正をするか否かが判定されるようになっていてよい。
【0027】
具体的には、下記の条件が成立すると判断されるとき、駆動力付加補正が実行されるようになっていてよい。
(a)トラクタのヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分の振幅又はスウェイ状態の程度を表す任意の指標値(振動状態量又は挙動状態量)が、所定の大きさを超えていないとき。
−上記の成分の振幅が所定の大きさを超えているときは、車両挙動の不安定化が相当に進んでおり、挙動安定化の緊急性が高いと想定されるため、車両の減速が優先され、駆動力付加補正は実行されない。
(b)所定の角度を超える路面勾配角度を有する路面を降坂走行していないとき。
−降坂走行中は、車両挙動が不安定化されやすいため、車両の減速が優先され、駆動力付加補正は実行されない。路面勾配角度及び車両の向きは、路面勾配検出部50fに於いて前後Gセンサの検出値及び車輪速微分値(車輪速加速度値)等を比較するなどして任意の手法で決定されてよい。所定の角度は、路面勾配角度が有意に大きいと判断される角度であり、実験的に又は理論的に任意に設定されてよい(所定の角度は、車速又は振動状態量に依存して変更されるようになっていてよい。)。
(c)路面摩擦係数が所定の閾値を超えているとき。
−路面摩擦係数が所定の閾値を超えていない低摩擦路面上では、車両挙動が不安定化されやすいため、車両の減速が優先され、駆動力付加補正は実行されない。路面摩擦係数は、路面摩擦係数検出部50gに於いて、前後Gセンサの検出値及び車輪速微分値(車輪速加速度値)等を比較するなどして任意の手法で決定されてよい。路面摩擦係数に対する所定の閾値は、路面摩擦係数が有意に低いと判断される値であり、実験的に又は理論的に任意に設定されてよい。
なお、上記の条件(b)又は(c)の判定は、省略されてもよい。その場合、路面勾配検出部50f又は路面摩擦係数検出部50gは設けられなくてよい。
【0028】
ステップ30に於いて上記の条件(a)〜(c)のいずれかが成立していないときは、駆動力付加補正は実行されず、駆動力補正値は0に設定される(ステップ50)。
【0029】
一方、ステップ30に於いて上記の条件(a)〜(c)が成立しているときには、ステップ40に於いて、駆動輪に付加されるべき駆動力補正値Tcp[N](=Fdr+Fdl)が、下記の式により算出される。
Tcp[N]=α・ΣFmbi[N]+(応答遅れ要素)…(1)
ここに於いて、ΣFmbiは、ステップ20にて決定されたスウェイ抑制挙動制御により付加される制動力Fmbiの総和、即ち、車両に生ずる減速量に対応する量であり、αは、任意に設定されてよい係数である。α=1のとき、スウェイ抑制挙動制御により生ずる減速量は、駆動力補正により実質的に相殺されることとなる。また、かかるαを1未満の任意値に設定することにより、スウェイ抑制挙動制御により生ずる減速量の一部を相殺する、即ち、車両の減速を任意の程度にて緩和することが可能となる。応答遅れ要素とは、本制御装置が制動力を要求する制御指令を出力してから実際に車両に制動力(減速力)が作用するまでの遅れと、本制御装置が駆動力を要求する制御指令を出力してから実際に車両に駆動力が作用するまでの遅れとの和である(前者の遅れは、ブレーキパッドとローターとのクリアランス、サスペンション剛性(車輪に生じた力が車体に伝達するまでの速さを決定)、トラクタ−トレーラ間の連結剛性(トレーラに生じた減速力がトラクタに伝達するまでの速さを決定)等に依存して実験的に又は理論的に設定されてよい量であり、後者の遅れは、エンジン又はモーターの作動遅れ、サスペンション剛性等に依存して実験的に又は理論的に設定されてよい量である。)なお、駆動力がエンジン又はモーターにて発生される駆動トルクの単位にて制御される場合には、発生されるべき駆動トルクの目標値Tcp[Nm]は、
Tcp[Nm]=α・ΣFmbi[N]・R[m]/Rdiff+(応答遅れ要素)…(2)
により与えられてよい。ここで、R[m]は、タイヤ動荷重半径であり、Rdiffは、デフギヤ比である。
【0030】
上記の如く各輪制動力Fmbiと駆動力補正値Tcpが決定されると、それらの値は、それぞれ、制動力制御部50dと駆動力制御部50eへ送信される。制動力制御部50dでは、既に触れた如く、通常の態様にて、各輪制動力目標値Fmbiを達成するべく、制御指令が、トラクタ制動装置46及び/又はトレーラ制動装置46tに対して発せられ、アンチヨーモーメントMc又はトレーラの制動力Fbtが生成される。これと同時に、駆動力制御部50eでは、運転者のアクセルペダルの踏込量に対応するアクセル開度に基づくエンジン又はモーターに対する運転者要求駆動力又は駆動トルクTd1、或いは、任意の定速走行装置による要求に基づく定速走行装置要求駆動力又は駆動トルクTd2が決定され、かかる要求駆動力又は駆動トルクTd1、Td2へステップ40で決定された駆動力又は駆動トルク補正値Tcpが付加されて、最終的な駆動力又は駆動トルクの目標値が決定される。そして、最終的な駆動力又は駆動トルクの目標値を達成する制御指令がエンジン又はモーターの各部へ送信される。エンジン又はモーターに於いて生ずる駆動力又は駆動トルクは、原則的には、左右の駆動輪に実質的に均等に伝達され、これにより、アンチヨーモーメントMcの作用効果に変更を生ずることなく、制動力による車両の減速を緩和又は相殺することとなる。
【0031】
かくして、上記の本発明による挙動制御装置に於いては、トレーラのスウェイ状態が発生し、かかるスウェイ状態の抑制のための制動力配分による挙動制御が実行される際、条件(a)〜(c)が成立する車両挙動の不安定化が然程に進んでいない場合又は挙動安定化の緊急性が然程に高くない場合には、スウェイ状態抑制の挙動制御の作用効果を変えないように且つ挙動制御により車両に作用する制動力を相殺する方向に駆動力が付加されることにより、車両の減速の程度が低減され、運転者の違和感や後続の車両への影響が軽減されることが期待される。しかしながら、車両挙動の不安定化が進んでいる場合、挙動安定化の緊急性が高い場合或いは車両挙動が不安定化し易い走行状態下では、駆動力付加補正は実行されないようになっているので、そのような場合には、車両の減速が為され、車両挙動の安定化がより確実に図られることとなる。
【0032】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0033】
例えば、ステップ10、ステップ30の判定条件は、車両の形式、積載状態、走行状態等に応じて適宜修正されてよい。また、駆動力補正値の決定に於いて、駆動力補正値は、各輪に配分される制動力の目標値の関数であるところ、かかる制動力の目標値は、ヨーレートγ、横加速度Gy若しくは車体スリップ角速度β’のスウェイ振動の周波数帯域の成分などの車両の挙動状態量の関数であるので、駆動力補正値は、直接に車両の挙動状態量に基づいて決定されてもよく、そのような場合も本発明の範囲に属することは理解されるべきである。更に、駆動系装置に於いて左右輪へ伝達される駆動トルクの配分比が可変である場合(所謂、可変トルク配分デフが装備されている場合)には、駆動輪に於いてスウェイ状態抑制のために配分される制動力の目標値から駆動力の目標値を差し引いた量の制駆動力が制動系装置又は駆動系装置により生成されるようになっていてよいことは理解されるべきである。その場合、各輪制動力と各輪駆動力とを総合してアンチヨーモーメントが生成されると共に、車両全体に作用する制駆動力が運転者又は定速走行装置の要求に合致するように各輪の制駆動力の配分が決定されるようになっていてよい(駆動力の一部がアンチヨーモーメントの生成に寄与することとなり得る。)。重要なことは、本発明による挙動制御装置に於いては、従前では、専ら制動力配分制御により実施されたスウェイ状態抑制制御に於いて駆動力の生成又は配分を実行し、車両が無用に減速されないようにするということである。
【特許請求の範囲】
【請求項1】
トラクタと該トラクタにより牽引されるトレーラとを含む連結車両のスウェイ状態を抑制するための挙動制御装置であって、スウェイ状態の発生時に各輪の制動力配分制御により前記スウェイ状態を抑制するヨーモーメントを発生すると伴に、前記制動力配分制御によって前記各輪に生ずる制動力による前記車両の減速量に基づいて決定される駆動力を前記車両の駆動輪に付与することを特徴とする装置。
【請求項2】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が前記ヨーモーメントを実質的に変更せずに前記車両の減速量を低減又は相殺するよう決定されることを特徴とする装置。
【請求項3】
請求項1の装置であって、前記ヨーモーメントを生成する制動力が前記トラクタの車輪に配分されることを特徴とする装置。
【請求項4】
請求項1の装置であって、前記ヨーモーメントを生成する制動力が前記トレーラの車輪に配分されることを特徴とする装置。
【請求項5】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が前記トラクタの挙動状態量に基づいて決定されることを特徴とする装置。
【請求項6】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が路面勾配又は路面摩擦係数に基づいて決定されることを特徴とする装置。
【請求項7】
請求項6の装置であって、前記車両が所定角度より大きい路面勾配を降下しているときには、前記駆動力の付与を実行しないことを特徴とする装置。
【請求項8】
請求項6の装置であって、前記車両が所定の値より低い路面摩擦係数を有する路面を走行しているときには、前記駆動力の付与を実行しないことを特徴とする装置。
【請求項1】
トラクタと該トラクタにより牽引されるトレーラとを含む連結車両のスウェイ状態を抑制するための挙動制御装置であって、スウェイ状態の発生時に各輪の制動力配分制御により前記スウェイ状態を抑制するヨーモーメントを発生すると伴に、前記制動力配分制御によって前記各輪に生ずる制動力による前記車両の減速量に基づいて決定される駆動力を前記車両の駆動輪に付与することを特徴とする装置。
【請求項2】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が前記ヨーモーメントを実質的に変更せずに前記車両の減速量を低減又は相殺するよう決定されることを特徴とする装置。
【請求項3】
請求項1の装置であって、前記ヨーモーメントを生成する制動力が前記トラクタの車輪に配分されることを特徴とする装置。
【請求項4】
請求項1の装置であって、前記ヨーモーメントを生成する制動力が前記トレーラの車輪に配分されることを特徴とする装置。
【請求項5】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が前記トラクタの挙動状態量に基づいて決定されることを特徴とする装置。
【請求項6】
請求項1の装置であって、前記車両の駆動輪に付与される駆動力が路面勾配又は路面摩擦係数に基づいて決定されることを特徴とする装置。
【請求項7】
請求項6の装置であって、前記車両が所定角度より大きい路面勾配を降下しているときには、前記駆動力の付与を実行しないことを特徴とする装置。
【請求項8】
請求項6の装置であって、前記車両が所定の値より低い路面摩擦係数を有する路面を走行しているときには、前記駆動力の付与を実行しないことを特徴とする装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−79470(P2011−79470A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−234650(P2009−234650)
【出願日】平成21年10月8日(2009.10.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月8日(2009.10.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]