
連続糸送出クリール
(1)良好な繊維/金属接触を確実にする研磨金属仕上げを有する駆動ロールと、(2)駆動ロール上の糸の多重巻き付けを可能にする駆動ロール/分離ロール組合せと、(3)フレーム上のパッケージへの容易なアクセスを提供する動作および待機パッケージ用枢動糸保持アームと、(4)枢動糸保持アームと組み合わされた、フレームから延びる1つまたは複数の枢動脚部とを有し、装置が比較的小さい設置面積と背景技術のOETO装置と比べて簡易化された糸通し/糸張りとを有する、糸を巻戻す装置および方法。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は糸巻戻し装置に関し、特に紡糸したままの(as−spun)オーバー・エンド・テーク・オフ(over−end−take−off)糸を製造装置に連続して送出するように設計された方法および装置に関する。
【背景技術】
【0002】
クリールから糸を巻戻す方法の背景技術例は、オーバー・エンド・テーク・オフ(OETO)法である。動作パッケージの糸の終端が待機パッケージの糸の先端に取り付けられているため、OETO法は巻戻しプロセスの連続動作を可能にする。OETO法では動作パッケージが完全に空になった後に待機パッケージが動作パッケージになる。しかしOETO法の欠点は容認できない糸張力変化が巻戻しプロセス中に発生する恐れがあることである。
【0003】
OETO法を実施するシステムおよび装置の背景技術は(非特許文献1)に開示されていた。具体的にはこの公開はエラストマー繊維が製造ラインに供給される前に通されるOETOシステムを記載している。開示のOETOシステムは、動作パッケージおよび待機パッケージのクリールと、緩和部と、モータ駆動ニップロールとを保持するラック構造を有する。緩和部はOETOシステムの動作パッケージとニップロールとの間に配置されている。緩和部は巻戻される糸に幾分緩みを提供することにより、上記の容認できない糸張力変化を抑制することを助ける。
【0004】
しかしこのような緩和部を含む背景技術のOETOシステムは、高レベルの粘着性を示す繊維または糸(すなわち特に高い凝集力を有する糸)に問題がある。さらにまた高レベルの粘着性を有する糸は、動作パッケージがクリールから巻戻される際に、摩擦力および糸張力レベルに異常に高い変化も示す。
【0005】
さらに緩和部により提供された糸の緩みは変化する可能性があるとともに、過剰な糸が動作パッケージから巻戻される恐れがある。この過剰な糸はニップロール内に引き込まれてそれ自体に巻き取られて、糸のもつれまたは破断につながる恐れがある。高レベルの粘着性を有する糸を使用することは、過剰な糸がそれ自体およびニップロールへ付着する可能性を助長する。巻戻しプロセス中の糸のもつれまたは破断には、製造ラインを停止させることが必要になり、巻戻しプロセスを遅らせ、さらに製造のコストを増加させる。
【0006】
背景技術のOETO装置は通例糸が緩和部を水平に横断するように構成されている。この構成において、糸は垂直である軸を有するニップロール中を横断する。しかしニップロールの軸のこのような垂直構成では、動作パッケージとニップロールとの間の緩和部内に配置された糸が垂れ下がりやすい。その結果ニップロール上の糸位置は不安定になる恐れがあるとともに、緩衝およびもつれが隣接糸間に生じる恐れがある。これらの問題の各々には製造ラインを停止させることが必要になる。
【0007】
さらにまたいくつかの製造用途(例えばおむつ製造)は、実質的に仕上げをしていない紡糸したままの繊維を使用する必要がある。このような仕上げをしていない糸は、上述の高レベルの粘着性に関連する問題を示す。
【0008】
高レベルの粘着性を有する糸を処理する場合、上記の問題はOETO方法および装置の適用を特に困難にする。背景技術のOETO装置は、(1)巻き取る前に加えられた粘着防止添加物を有する糸を用いること、および/または(2)動作パッケージが巻戻された後、異なるクリールに巻き戻されて巻き戻しパッケージを作製する、巻き戻しパッケージを用いること、により巻戻しプロセスのこれらの問題に対処するように試みた。これらの手法の両方とも、製造および巻戻しプロセスに対して追加費用を追加する。
【0009】
上記の問題の結果として背景技術のOETO装置は、緩和部、高レベルの粘着性およびOETO法で巻戻される糸の破断による、これらの困難さを考慮に入れるように設計されている。一例として米国特許公報(特許文献1)(ヒーニー(Heaney)ら)はパッケージから高レベルの粘着性を有するエラストマー繊維パッケージを巻戻すOETO方法および装置を開示している。具体的にはヒーニー(Heaney)らのOETO装置は、繊維ガイドと繊維パッケージとの間が最小距離であることが必要である。ヒーニー(Heaney)らによれば、0.41メートル未満の最小距離が望ましくない大きな張力変化を生じる恐れがある。これらの変化はプロセス制御問題を生じる恐れがあるとともに糸破断につながる恐れもある。さらにヒーニー(Heaney)らによれば、0.91メートルより長い距離は巻戻し装置をより大きくさせるとともに人間工学的に望ましくない。繊維により示される粘着性レベルが増すにつれて、最小許容距離dが増す。約2グラムを超え且つ約7.5グラム未満の粘着性レベルを有する糸の場合、dは少なくとも約0.41メートルであることが好ましく、約7.5グラムを超える粘着性レベルを有する糸の場合、dは少なくとも約0.71メートルであることが好ましい。
【0010】
しかしこのような最小距離および高い粘着性糸の他の要件により、OETO装置は通例製造装置内に大きな床面積を取り得る大きな設置面積を有するフレームが必要である。
【0011】
そのため高レベルの粘着性を有する糸を巻戻すOETO装置の技術において、背景技術の方法および装置のもつれ、破断および高製造コストの問題を回避する必要がある。さらにまた粘着性添加物を有する糸を巻戻すOETO装置の技術において、比較的小さい設置面積で実施可能である必要がある。
【0012】
【特許文献1】米国特許第6,676,054号明細書
【非特許文献1】「技術公開雑誌(Research Disclosure)」、1995年11月、第37922号、p.729
【発明の開示】
【課題を解決するための手段】
【0013】
本発明は(1)良好な繊維/金属接触を確実にする研磨金属仕上げを有する駆動ロールと、(2)駆動ロール上の糸の多重巻き付けを可能にする駆動ロール/分離ロール組合せと、(3)フレーム上のパッケージへの容易なアクセスを提供する動作および待機パッケージ用枢動糸保持アームと、(4)枢動糸保持アームと組み合わされた、フレームから延びる1つまたは複数の枢動脚部とを有し、装置が比較的小さい設置面積と背景技術のOETO装置と比べて簡易化された糸通し(threading)/糸張り(string−up)とを有する、糸を巻戻す装置である。
【0014】
本発明の一実施形態は、少なくとも1つの枢動脚部が接続されたフレームと、好適にフレームに取り付けられるとともに1つまたは複数の動作パッケージから糸を連続して巻戻すように構成された駆動制御アセンブリと、好適にフレームに取り付けられるとともに駆動制御アセンブリに電気的に接続された電気制御ボックスと、各枢動脚部に取り付けられた2つ以上の枢動糸保持アームと、フレームに取り付けられた第1の糸ガイドとを有する、糸を連続して巻戻す装置である。フレームの枢動脚部がフレームに対して鋭角に配置され、それらが小さい装置設置面積を提供して製造領域内でより小さいスペースを取るように調整され得る。第1の糸ガイドが動作パッケージから最小距離、好適には少なくとも0.34メートル離間している。
【0015】
本発明の他の実施形態は、(a)動作パッケージを、少なくとも1つの糸が動作パッケージから動作パッケージの回転軸と鋭角を画定する方向に巻戻すことができるように、枢動アーム上に保持するステップと、(b)ステップ(a)の動作パッケージから制御された所定の速度で糸を巻戻すステップと、(c)糸を第1の糸ガイドを通過させることによりステップ(a)の糸の方向を制御するステップと、(d)動作パッケージの回転軸により画定される線上で測定された、第1の糸ガイドから第1の糸ガイドに面する動作パッケージの端までの最小距離(d)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、少なくとも約0.34メートルに等しい、または
ii.約7.5を超える粘着性を有する糸の場合、約0.71メートル〜約0.91メートルに等しくなるように、距離(d)を制御するステップと、(e)動作パッケージの回転軸およびオリフィス面に垂直な第1の糸ガイドの中心軸にそれぞれ対応する仮想線の交点により画定される角度(θ)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、0°〜約30°に等しい、または
ii.約7.5グラムOETOを超える粘着性レベルを有する糸の場合、0°〜約10°に等しくなるように、角度(θ)を制御するステップとを含むことを特徴とする、糸を連続して巻戻す方法である。
【0016】
ここで本発明のいくつかの実施形態を、添付の図面を参照して読まれる際の明細書の以下のさらに詳細な説明でさらに説明する。
【発明を実施するための最良の形態】
【0017】
本発明の糸を巻戻す装置は、巻き戻された糸および/または粘着防止添加物を有する紡糸したままの(as−spun)OETO糸のOETO方法の費用効率の高い使用を可能にする。特に本発明の装置は紡糸したままのOETO糸を連続して巻戻すとともに、比較的小さい設置面積で比較的一定の糸張力を与える。これにより製造プロセスの効率が向上する。
【0018】
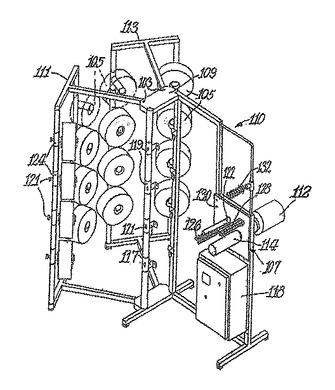
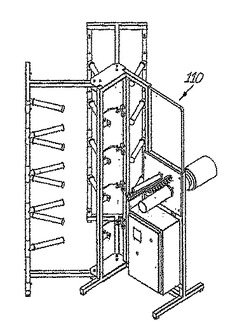
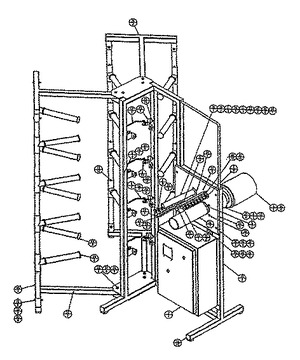
図1は糸の連続巻戻し用の、本発明の装置の一実施形態を示す例示的斜視図である。図1は2つの枢動脚部111、113を有するフレーム110を示し、枢動脚部111、113は、間に架橋支持部を有する2つの平行支柱として図1に示す中心脚部109に接続されている。中心脚部109は従って図1に示した実施形態においてフレーム110の一方側から延びている。
【0019】
枢動脚部111、113は枢動糸保持アーム120(図2)を含む。枢動糸保持アーム120は、枢動脚部111、113の各々上に8個までのパッケージ105のためのクリールを保持する。パッケージ105は動作パッケージか待機パッケージのいずれかであり得る。フレーム110の枢動脚部111、113は、中心脚部109に対して鋭角(α1、α2)に設定されて、フレーム110に多目的で小さな設置面積を提供している。鋭角(α1、α2)は0°〜90°の範囲である。その結果フレームを2つの枢動脚部111、113の様々な配向で構成して製造現場のスペースを最適化することができる。
【0020】
加えて図1は、フレーム110の中心脚部109に取り付けられた、第1の糸ガイド117と駆動制御アセンブリ107とを示す。駆動制御アセンブリ107は図1に示すように、駆動モータ112と、駆動ロール114と、電気制御ボックス118と、分離ロール122と、第2の糸ガイド126と、破断センサ128と、第3の糸ガイド132とをさらに備える。第1の糸ガイド117と、第2の糸ガイド126と、破断センサ128と第3の糸ガイド132の数に対する非限定値は8である。駆動制御アセンブリ107は以下に図3により詳細に示す。
【0021】
動作および待機パッケージ105の非限定例は、巻き取られた繊維または糸の最高3kgクリールパッケージである。限定したくはないが、OETO巻戻し用の例示的糸は、本願特許出願人(元デュポン(Dupont))により販売されている、ライクラ(LYCRA)(登録商標)などのスパンデックス(セグメント化ポリウレタン)である。動作および待機パッケージ105は、通例小さい設置面積のフレーム110上の2つの隣接する枢動糸保持アーム120位置のいずれかを占有している。枢動糸保持アーム120は枢動して、動作および待機パッケージ105へのアクセスを容易にする。枢動糸保持アーム120は標準糸チューブコア(例えば紡糸したままのOETO材料)を保持する。
【0022】
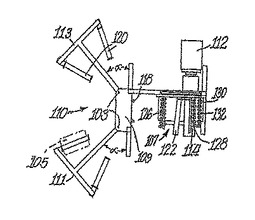
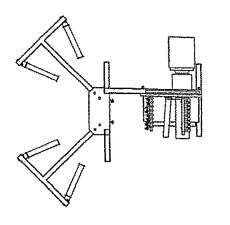
図2は図1に示した糸を巻戻す装置の上面平面図である。図2に見られるようにフレーム110は、パッケージ105を保持するフレーム110の2つの枢動脚部111、113を、中心脚部109に対して鋭角(α1、α2)に配置することにより、多目的構成および小さい設置面積を提供するように設計されている。2つの脚部111、113を移動することができるため、およびフレーム110が小さい設置面積を有するため、本発明は製造環境においてより小さいスペースを占める。
【0023】
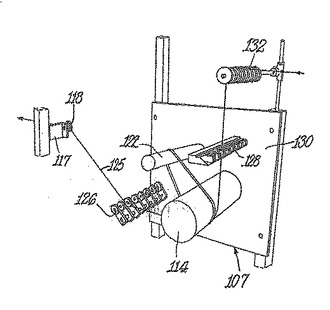
図3は駆動制御アセンブリ107のより詳細な図を示す。この実施形態において駆動ロール114は分離ロール122の下方に載置されている。第2の糸ガイド126は分離ロール122のいずれかの側に載置されている。第2の糸ガイド126は分離ロール122の前であって、駆動ロール114の前且つ横に載置されている。破断センサ128は駆動ロール114の上方であって右側に載置されている。第3の糸ガイド132は分離ロール122、駆動ロール114および破断センサ128の各々の上方であって後に載置されている。第3の糸ガイド132は、駆動制御アセンブリ前面パネル130上または小さい設置面積のフレーム110上に載置されている。分離ロール122、駆動ロール114および破断センサ128に対する第3の糸ガイド132の位置は上記の通りである。
【0024】
加えて図3は駆動ロール114の周囲の多重巻糸を示す。駆動ロール114の周囲の多重巻糸は、糸が滑ることのない正方向供給を確実にする。これは背景技術のOETO装置に発生したもつれおよび破断を回避するのに役立つ。
【0025】
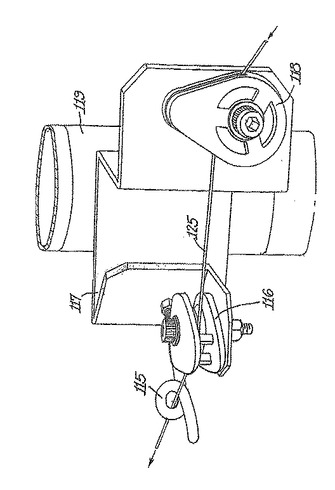
図4は、動作または待機パッケージ105から駆動ロール114まで糸/繊維125を通す案内システムを通過する糸の経路の詳細を示す。枢動ガイドブラケット117は、枢動ガイドブラケット117をフレーム110の中心脚部109上で枢動可能にするスリーブ119上に載置されている。枢動ガイドブラケット117は固定ネジ121で特定の位置に固定されている。[マイロン(Myron):121、図4には図示せず]。枢動ガイドブラケット117は、枢動脚部111、113が設定されている鋭角に従って調整される。枢動ブラケット117は、駆動制御アセンブリパネル130に取り付けられた第2の糸ガイド126へ糸を向ける、ピグテールガイド115と糸ガイド116、118とを含むがこれらに限定されない。この経路内でピグテールガイド115を使用することにより、背景技術の装置におけるアイレットの使用に比べて、動作および待機パッケージの装着/糸張りの容易性が増す。水平載置された糸ガイド116はピグテールガイド115に最も近接して位置決めされているとともに、垂直載置された糸ガイド118はブラケット117の垂直面上に位置決めされている。
【0026】
好適には糸/繊維125はスパンデックスまたはセグメント化ポリウレタンと称されるものから選択される。特に好適なスパンデックスはライクラ(Lycra)(登録商標)の商標名で提供されるとともに、本願特許出願人から入手可能である。ライクラ(Lycra)(登録商標)スパンデックスの好適な等級には、151型および262P型があるがこれらに限定されない。
【0027】
フレーム用組立部品(例えばブラケット117を枢動させる枢動保持アーム120)は、例えば米国バージニア州ウェインズボロ、ノース・ベイヤード・アベニュ(North Bayard Avenue,Waynesboro,Virginia USA)444のインダストリアル・マシン・ワークス(Industrial Machine Works)から入手可能である。モータおよび電気制御ボックス118キャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックス118を構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。
【0028】
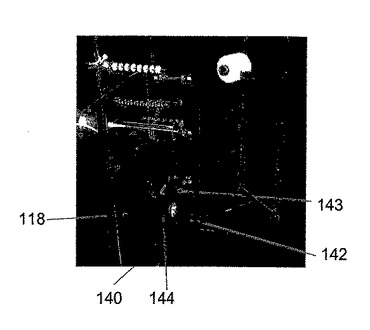
図5Aは電気制御ボックス118の正面図である。具体的には図5Aは電気制御ボックス118のアクセスドア144上に載置された、駆動アクセスパネル140と、電力切断スイッチ142と、モード選択スイッチ143とを示す。
【0029】
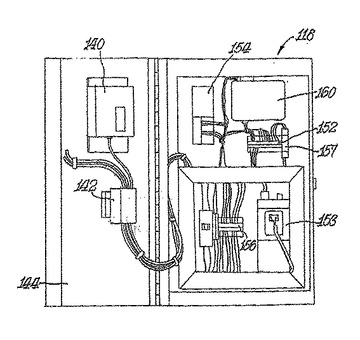
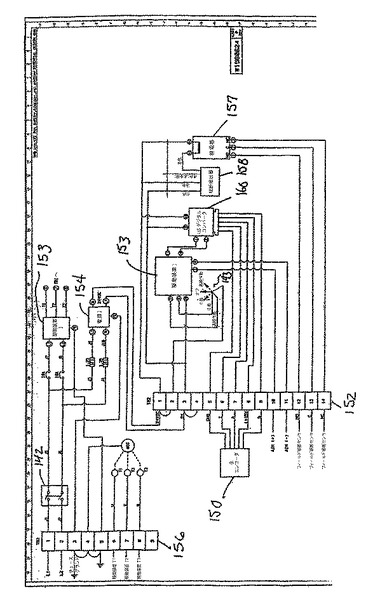
図5Bは電気制御ボックス118の内部の図を示す。具体的には図5Bは電気制御ボックス118の構成要素用の信号用インターフェース接続を提供する端子ブロック152、156を示す。電気制御ボックス118の主要構成要素の非限定例には、主エンコーダ150(図示せず)、電源154、駆動モータコントローラ153、継電器157、破断検出インターフェース158(図示せず)、およびデジタルコンバータ160があるがこれらに限定されない。これらの構成要素の相互接続を示す概略図が図5Cに提示されている。破断検出インターフェース158および駆動モータコントローラ153は、駆動制御アセンブリ107の破断検出器128および駆動モータ112にそれぞれ電気的に接続されている。主エンコーダ150は外部に設けられていてもよく、破断検出インターフェース158は破断検出器128の一部であってもよい。
【0030】
モータおよび電気制御ボックス118キャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックス118を構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。電気制御キャビネット
【0031】
フレーム110の代替構成(図示せず)は、フレーム上に現存の枢動糸保持アームの各々に対して180°の角度に位置する第2の糸保持アームを載置することもできる。この代替構成により、人が小さい設置面積のフレーム110上に追加糸クリールを手渡すことが可能になるため、製造プロセスで使える状態のより多くの動作および待機パッケージ105を提供することもできる。
【0032】
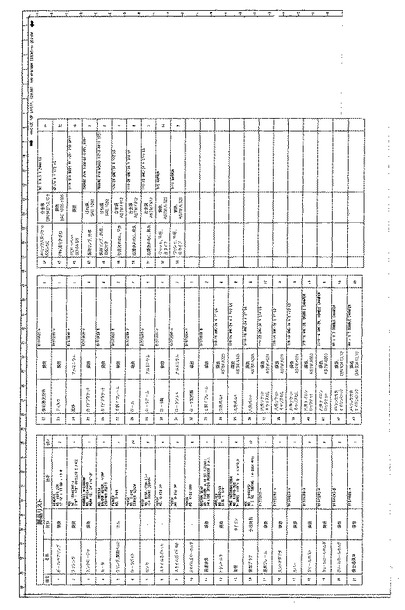
図6Aは糸の連続巻戻し用OETO装置を示す他の例示的斜視図である。図6Bは図6Aに示された糸を巻戻す装置の例示的上面平面図である。図6Cは図6Aの部品リストである。
【0033】
図6Aの組立部品は、例えば米国バージニア州ウェインズボロ、ノース・ベイヤード・アベニュ(North Bayard Avenue,Waynesboro,Virginia USA)444のインダストリアル・マシン・ワークス(Industrial Machine Works)から入手可能である。組立部品は図6Cの部品リストに「D」番号によって示されている。図6Aのモータおよび電気制御ボックスキャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックスを構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。
【0034】
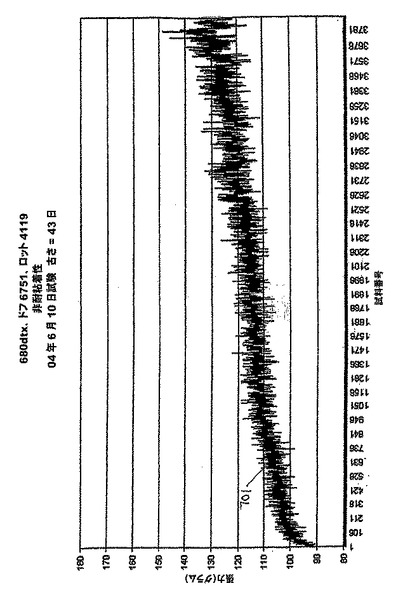
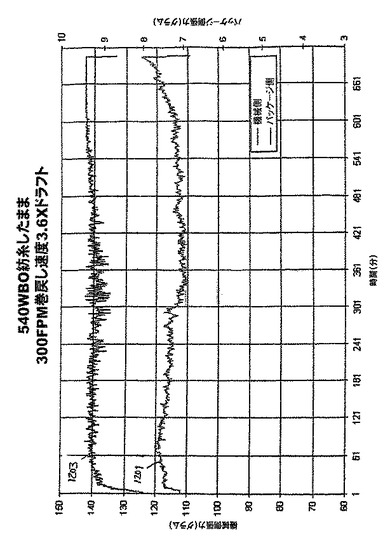
図7〜図12は本発明のOETO装置を用いた試験結果の例示的グラフである。試験に用いた糸/繊維は、スパンデックスまたはセグメント化ポリウレタンと称されるものから選択されている。特に好適なスパンデックスはライクラ(Lycra)(登録商標)の商標名で提供されるとともに、本願特許出願人から入手可能である。ライクラ(Lycra)(登録商標)スパンデックスの好適な等級には、151型および262P型があるがこれらに限定されない。図9、図10および図12の場合、粘着防止添加物の濃度は0.05%〜1%の範囲である。各図の説明文は、フィート/分(FPM)単位の巻戻しおよび巻き取り速度などの試験に特有のパラメータを与えている。各図の説明文は糸のロット番号、試験日付および被験糸の古さも示す。
【0035】
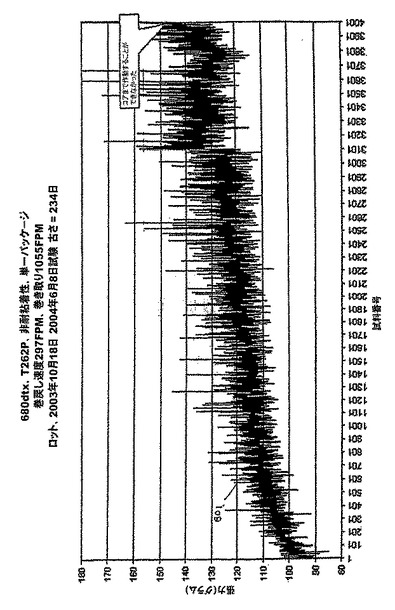
図7は本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。図7に見られるように糸張力701は、約95グラムから始まり試験サイクルの最後に約140グラムまで上昇する。これは糸張力の約47%の増加に相当する。
【0036】
図8は本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。図8に見られるように糸張力801は、約95グラムから始まり試験サイクルの最後に約150グラムまで上昇する。これは糸張力の約58%の増加に相当する。
【0037】
さらに図8のグラフは、180グラムという最大測定値までの糸張力の短いスパイクを示している。また糸をクリールのコアまで巻戻すことができなかった。
【0038】
図9は本発明のOETO装置を用いた、低レベルの粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。図9に見られるように糸張力901は、約100グラムから始まり試験サイクルの最後に約120グラムまで上昇する。これは糸張力の約20%の増加に相当する。これは糸張力に対して比較的一定の値であるが、図9に図示するように、巻戻し方法中になお糸の破断があった。
【0039】
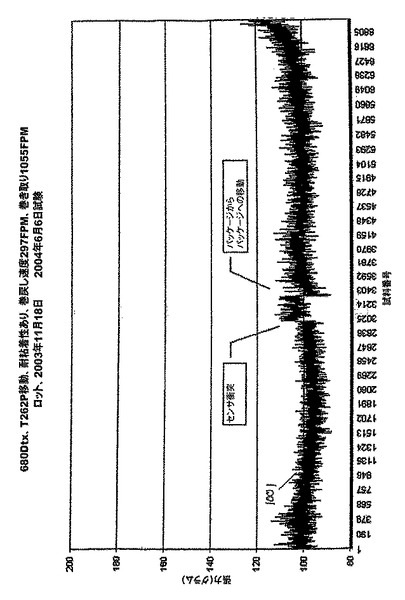
図10は本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。図10に見られるように糸張力1001は、約100グラムから始まり試験サイクルの最後に約120グラムまで上昇する。これは糸張力の約20%の増加に相当する。さらに動作パッケージから待機パッケージへの移動の結果として、巻戻し方法中に糸張力に段階状の急上昇があった。
【0040】
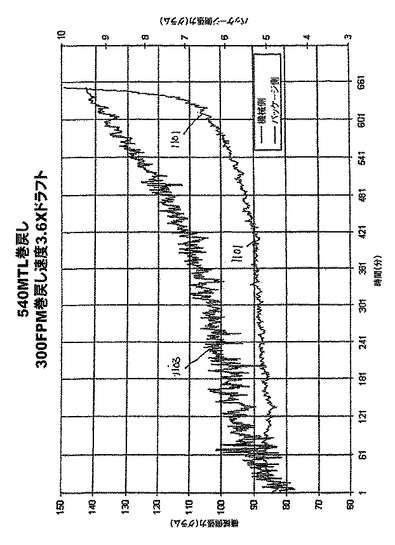
図11は本発明のOETO装置を用いた、巻き戻しパッケージ上の糸に関する張力測定の試験結果を示す例示的グラフである。図11はパッケージ側糸張力1101および機械側糸張力1103の両方を示す。具体的には図11は典型的な巻き戻しパッケージ用のパッケージ側糸張力1101を示す。パッケージ側糸張力は、約80グラムから始まり試験サイクルの最後に約140グラムまで上昇する。これは糸張力の約75%の増加に相当する。
【0041】
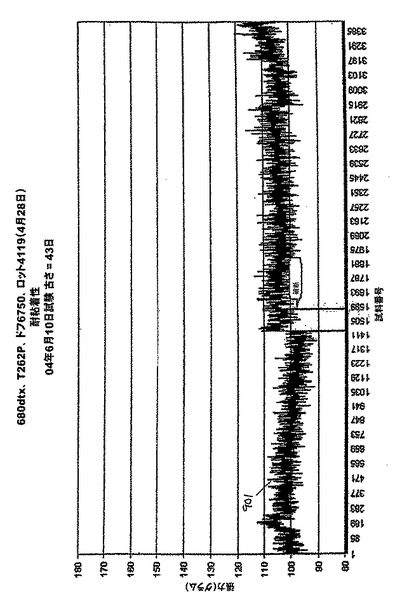
図12は本発明の方法および装置で巻戻された、耐粘着性を有する紡糸したままのOETO糸パッケージに関する張力測定試験結果を示す例示的グラフである。図12は望ましい比較的一定の糸張力を示している。図12はパッケージ側糸張力1201および機械側糸張力1203の両方も示している。具体的には図12は、約110グラムから始まり試験サイクルの最後に最大125グラムまでしか上昇しない、パッケージ側糸張力1201を示す。75%の糸張力の増加を示す図11の試験結果に比べて、これらの試験結果は、本発明の巻戻し方法および装置が、糸張力がわずか14%の増加しかしないということを示す。
【0042】
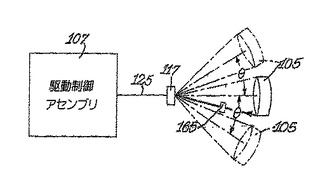
図13は本発明のフレーム110の中心脚部109に対する動作パッケージの構成を示す。図13において動作パッケージ105は、枢動糸ホルダ120(図2)により所望の配向に維持される。枢動糸ホルダ120の直径は、動作パッケージ105の開口芯の直径より小さく、動作パッケージ105が適当に位置決めされた枢動糸ホルダ120上で摺動可能であるとともに、本発明のOETO装置により糸125(図4)を動作パッケージ105から巻戻すことができるようになっている。その後糸125(図4)は巻戻しプロセスのため駆動制御アセンブリ107に向けられる。動作パッケージ105と第1の糸ガイド117との間の距離(d)は、少なくとも約0.34メートルであるとともに好適には約0.91メートル以下であるが、高粘着性繊維と動作するように維持できる。それぞれ動作パッケージ105の回転軸およびオリフィス面に垂直である静止ガイド開口の中心軸に対応する仮想線の交点により画定される鋭角(θ)は、高粘着性繊維との動作の場合0〜約30°に維持することが好ましい。
【0043】
繊維により示される粘着性レベルが増加するにつれて、最大許容角度θは低下する。θの観点で測定されるような、第1の糸ガイド117を通過する際の糸125の方向変化は、約2を超え且つ約7.5未満の粘着性レベルを有する糸の場合、0°〜約30°に、約7.5を超える粘着性レベルを有する糸の場合、0°〜約10°に限定されることが好ましい。より大きい角度は糸ライン張力の過度な変化、延伸、さらには糸破断になる恐れがある。
【0044】
従って上記の試験結果により示されるように、本発明の方法および装置は、比較的小さい設置面積で実施可能であるとともに、背景技術のもつれ、破断、および製造コスト増加の問題を回避することができる、粘着防止添加物を有する糸を巻戻すOETO方法および装置を提供する。
【0045】
上記の説明は本発明を図示するとともに説明している。さらに本開示は本発明の好適な実施形態のみを示すとともに説明しているが、上述したように本発明は様々な他の組合せ、変更例および環境で用いることができるとともに、本明細書に示した発明の概念の範囲内で、上記の教示および/または関連の技術および知識に相応した、変形および変更が可能であることは理解できよう。上記に説明した実施形態は、本発明を実行することについて既知の最良の形態を説明するとともに、当業者が本発明をそのようなまたは他の実施形態で、および本発明の特定の用途または使途により必要とされる様々な変更例と共に利用できるようにすることをさらに意図するものである。したがって説明は本発明を本明細書に開示された形態および用途に限定しようとするものではない。また添付の特許請求の範囲は代替実施形態を含むものと解釈されることを意図するものである。
【図面の簡単な説明】
【0046】
【図1】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図2】図1に示した糸を巻戻す装置の例示的上面平面図である。
【図3】駆動制御アセンブリの例示的詳細図である。
【図4】動作または待機パッケージから駆動ロールまで糸を通す案内システムを通過する糸の経路の例示的詳細斜視図を示す。
【図5A】電気制御ボックスの例示的外観図である。
【図5B】電気制御ボックスの例示的内部である。
【図5C】電気制御ボックスの例示的概略図である。
【図6A−1】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図6A−2】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図6B】図6Aに示した糸を巻戻す装置の例示的上面平面図である。
【図6C】図6Aの部品リストである。
【図7】本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。
【図8】本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す他の例示的グラフである
【図9】本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。
【図10】本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す他の例示的グラフである。
【図11】本発明のOETO装置を用いた、巻き戻しパッケージ上の糸に関する張力測定の試験結果を示す例示的グラフである
【図12】本発明のOETO装置で巻戻された紡糸したままの耐粘着性を有するOETO糸パッケージに関する張力測定試験結果を示す例示的グラフである。
【図13】本発明のフレームの中心脚部に対する動作パッケージの構成を示す。
【技術分野】
【0001】
本発明は糸巻戻し装置に関し、特に紡糸したままの(as−spun)オーバー・エンド・テーク・オフ(over−end−take−off)糸を製造装置に連続して送出するように設計された方法および装置に関する。
【背景技術】
【0002】
クリールから糸を巻戻す方法の背景技術例は、オーバー・エンド・テーク・オフ(OETO)法である。動作パッケージの糸の終端が待機パッケージの糸の先端に取り付けられているため、OETO法は巻戻しプロセスの連続動作を可能にする。OETO法では動作パッケージが完全に空になった後に待機パッケージが動作パッケージになる。しかしOETO法の欠点は容認できない糸張力変化が巻戻しプロセス中に発生する恐れがあることである。
【0003】
OETO法を実施するシステムおよび装置の背景技術は(非特許文献1)に開示されていた。具体的にはこの公開はエラストマー繊維が製造ラインに供給される前に通されるOETOシステムを記載している。開示のOETOシステムは、動作パッケージおよび待機パッケージのクリールと、緩和部と、モータ駆動ニップロールとを保持するラック構造を有する。緩和部はOETOシステムの動作パッケージとニップロールとの間に配置されている。緩和部は巻戻される糸に幾分緩みを提供することにより、上記の容認できない糸張力変化を抑制することを助ける。
【0004】
しかしこのような緩和部を含む背景技術のOETOシステムは、高レベルの粘着性を示す繊維または糸(すなわち特に高い凝集力を有する糸)に問題がある。さらにまた高レベルの粘着性を有する糸は、動作パッケージがクリールから巻戻される際に、摩擦力および糸張力レベルに異常に高い変化も示す。
【0005】
さらに緩和部により提供された糸の緩みは変化する可能性があるとともに、過剰な糸が動作パッケージから巻戻される恐れがある。この過剰な糸はニップロール内に引き込まれてそれ自体に巻き取られて、糸のもつれまたは破断につながる恐れがある。高レベルの粘着性を有する糸を使用することは、過剰な糸がそれ自体およびニップロールへ付着する可能性を助長する。巻戻しプロセス中の糸のもつれまたは破断には、製造ラインを停止させることが必要になり、巻戻しプロセスを遅らせ、さらに製造のコストを増加させる。
【0006】
背景技術のOETO装置は通例糸が緩和部を水平に横断するように構成されている。この構成において、糸は垂直である軸を有するニップロール中を横断する。しかしニップロールの軸のこのような垂直構成では、動作パッケージとニップロールとの間の緩和部内に配置された糸が垂れ下がりやすい。その結果ニップロール上の糸位置は不安定になる恐れがあるとともに、緩衝およびもつれが隣接糸間に生じる恐れがある。これらの問題の各々には製造ラインを停止させることが必要になる。
【0007】
さらにまたいくつかの製造用途(例えばおむつ製造)は、実質的に仕上げをしていない紡糸したままの繊維を使用する必要がある。このような仕上げをしていない糸は、上述の高レベルの粘着性に関連する問題を示す。
【0008】
高レベルの粘着性を有する糸を処理する場合、上記の問題はOETO方法および装置の適用を特に困難にする。背景技術のOETO装置は、(1)巻き取る前に加えられた粘着防止添加物を有する糸を用いること、および/または(2)動作パッケージが巻戻された後、異なるクリールに巻き戻されて巻き戻しパッケージを作製する、巻き戻しパッケージを用いること、により巻戻しプロセスのこれらの問題に対処するように試みた。これらの手法の両方とも、製造および巻戻しプロセスに対して追加費用を追加する。
【0009】
上記の問題の結果として背景技術のOETO装置は、緩和部、高レベルの粘着性およびOETO法で巻戻される糸の破断による、これらの困難さを考慮に入れるように設計されている。一例として米国特許公報(特許文献1)(ヒーニー(Heaney)ら)はパッケージから高レベルの粘着性を有するエラストマー繊維パッケージを巻戻すOETO方法および装置を開示している。具体的にはヒーニー(Heaney)らのOETO装置は、繊維ガイドと繊維パッケージとの間が最小距離であることが必要である。ヒーニー(Heaney)らによれば、0.41メートル未満の最小距離が望ましくない大きな張力変化を生じる恐れがある。これらの変化はプロセス制御問題を生じる恐れがあるとともに糸破断につながる恐れもある。さらにヒーニー(Heaney)らによれば、0.91メートルより長い距離は巻戻し装置をより大きくさせるとともに人間工学的に望ましくない。繊維により示される粘着性レベルが増すにつれて、最小許容距離dが増す。約2グラムを超え且つ約7.5グラム未満の粘着性レベルを有する糸の場合、dは少なくとも約0.41メートルであることが好ましく、約7.5グラムを超える粘着性レベルを有する糸の場合、dは少なくとも約0.71メートルであることが好ましい。
【0010】
しかしこのような最小距離および高い粘着性糸の他の要件により、OETO装置は通例製造装置内に大きな床面積を取り得る大きな設置面積を有するフレームが必要である。
【0011】
そのため高レベルの粘着性を有する糸を巻戻すOETO装置の技術において、背景技術の方法および装置のもつれ、破断および高製造コストの問題を回避する必要がある。さらにまた粘着性添加物を有する糸を巻戻すOETO装置の技術において、比較的小さい設置面積で実施可能である必要がある。
【0012】
【特許文献1】米国特許第6,676,054号明細書
【非特許文献1】「技術公開雑誌(Research Disclosure)」、1995年11月、第37922号、p.729
【発明の開示】
【課題を解決するための手段】
【0013】
本発明は(1)良好な繊維/金属接触を確実にする研磨金属仕上げを有する駆動ロールと、(2)駆動ロール上の糸の多重巻き付けを可能にする駆動ロール/分離ロール組合せと、(3)フレーム上のパッケージへの容易なアクセスを提供する動作および待機パッケージ用枢動糸保持アームと、(4)枢動糸保持アームと組み合わされた、フレームから延びる1つまたは複数の枢動脚部とを有し、装置が比較的小さい設置面積と背景技術のOETO装置と比べて簡易化された糸通し(threading)/糸張り(string−up)とを有する、糸を巻戻す装置である。
【0014】
本発明の一実施形態は、少なくとも1つの枢動脚部が接続されたフレームと、好適にフレームに取り付けられるとともに1つまたは複数の動作パッケージから糸を連続して巻戻すように構成された駆動制御アセンブリと、好適にフレームに取り付けられるとともに駆動制御アセンブリに電気的に接続された電気制御ボックスと、各枢動脚部に取り付けられた2つ以上の枢動糸保持アームと、フレームに取り付けられた第1の糸ガイドとを有する、糸を連続して巻戻す装置である。フレームの枢動脚部がフレームに対して鋭角に配置され、それらが小さい装置設置面積を提供して製造領域内でより小さいスペースを取るように調整され得る。第1の糸ガイドが動作パッケージから最小距離、好適には少なくとも0.34メートル離間している。
【0015】
本発明の他の実施形態は、(a)動作パッケージを、少なくとも1つの糸が動作パッケージから動作パッケージの回転軸と鋭角を画定する方向に巻戻すことができるように、枢動アーム上に保持するステップと、(b)ステップ(a)の動作パッケージから制御された所定の速度で糸を巻戻すステップと、(c)糸を第1の糸ガイドを通過させることによりステップ(a)の糸の方向を制御するステップと、(d)動作パッケージの回転軸により画定される線上で測定された、第1の糸ガイドから第1の糸ガイドに面する動作パッケージの端までの最小距離(d)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、少なくとも約0.34メートルに等しい、または
ii.約7.5を超える粘着性を有する糸の場合、約0.71メートル〜約0.91メートルに等しくなるように、距離(d)を制御するステップと、(e)動作パッケージの回転軸およびオリフィス面に垂直な第1の糸ガイドの中心軸にそれぞれ対応する仮想線の交点により画定される角度(θ)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、0°〜約30°に等しい、または
ii.約7.5グラムOETOを超える粘着性レベルを有する糸の場合、0°〜約10°に等しくなるように、角度(θ)を制御するステップとを含むことを特徴とする、糸を連続して巻戻す方法である。
【0016】
ここで本発明のいくつかの実施形態を、添付の図面を参照して読まれる際の明細書の以下のさらに詳細な説明でさらに説明する。
【発明を実施するための最良の形態】
【0017】
本発明の糸を巻戻す装置は、巻き戻された糸および/または粘着防止添加物を有する紡糸したままの(as−spun)OETO糸のOETO方法の費用効率の高い使用を可能にする。特に本発明の装置は紡糸したままのOETO糸を連続して巻戻すとともに、比較的小さい設置面積で比較的一定の糸張力を与える。これにより製造プロセスの効率が向上する。
【0018】
図1は糸の連続巻戻し用の、本発明の装置の一実施形態を示す例示的斜視図である。図1は2つの枢動脚部111、113を有するフレーム110を示し、枢動脚部111、113は、間に架橋支持部を有する2つの平行支柱として図1に示す中心脚部109に接続されている。中心脚部109は従って図1に示した実施形態においてフレーム110の一方側から延びている。
【0019】
枢動脚部111、113は枢動糸保持アーム120(図2)を含む。枢動糸保持アーム120は、枢動脚部111、113の各々上に8個までのパッケージ105のためのクリールを保持する。パッケージ105は動作パッケージか待機パッケージのいずれかであり得る。フレーム110の枢動脚部111、113は、中心脚部109に対して鋭角(α1、α2)に設定されて、フレーム110に多目的で小さな設置面積を提供している。鋭角(α1、α2)は0°〜90°の範囲である。その結果フレームを2つの枢動脚部111、113の様々な配向で構成して製造現場のスペースを最適化することができる。
【0020】
加えて図1は、フレーム110の中心脚部109に取り付けられた、第1の糸ガイド117と駆動制御アセンブリ107とを示す。駆動制御アセンブリ107は図1に示すように、駆動モータ112と、駆動ロール114と、電気制御ボックス118と、分離ロール122と、第2の糸ガイド126と、破断センサ128と、第3の糸ガイド132とをさらに備える。第1の糸ガイド117と、第2の糸ガイド126と、破断センサ128と第3の糸ガイド132の数に対する非限定値は8である。駆動制御アセンブリ107は以下に図3により詳細に示す。
【0021】
動作および待機パッケージ105の非限定例は、巻き取られた繊維または糸の最高3kgクリールパッケージである。限定したくはないが、OETO巻戻し用の例示的糸は、本願特許出願人(元デュポン(Dupont))により販売されている、ライクラ(LYCRA)(登録商標)などのスパンデックス(セグメント化ポリウレタン)である。動作および待機パッケージ105は、通例小さい設置面積のフレーム110上の2つの隣接する枢動糸保持アーム120位置のいずれかを占有している。枢動糸保持アーム120は枢動して、動作および待機パッケージ105へのアクセスを容易にする。枢動糸保持アーム120は標準糸チューブコア(例えば紡糸したままのOETO材料)を保持する。
【0022】
図2は図1に示した糸を巻戻す装置の上面平面図である。図2に見られるようにフレーム110は、パッケージ105を保持するフレーム110の2つの枢動脚部111、113を、中心脚部109に対して鋭角(α1、α2)に配置することにより、多目的構成および小さい設置面積を提供するように設計されている。2つの脚部111、113を移動することができるため、およびフレーム110が小さい設置面積を有するため、本発明は製造環境においてより小さいスペースを占める。
【0023】
図3は駆動制御アセンブリ107のより詳細な図を示す。この実施形態において駆動ロール114は分離ロール122の下方に載置されている。第2の糸ガイド126は分離ロール122のいずれかの側に載置されている。第2の糸ガイド126は分離ロール122の前であって、駆動ロール114の前且つ横に載置されている。破断センサ128は駆動ロール114の上方であって右側に載置されている。第3の糸ガイド132は分離ロール122、駆動ロール114および破断センサ128の各々の上方であって後に載置されている。第3の糸ガイド132は、駆動制御アセンブリ前面パネル130上または小さい設置面積のフレーム110上に載置されている。分離ロール122、駆動ロール114および破断センサ128に対する第3の糸ガイド132の位置は上記の通りである。
【0024】
加えて図3は駆動ロール114の周囲の多重巻糸を示す。駆動ロール114の周囲の多重巻糸は、糸が滑ることのない正方向供給を確実にする。これは背景技術のOETO装置に発生したもつれおよび破断を回避するのに役立つ。
【0025】
図4は、動作または待機パッケージ105から駆動ロール114まで糸/繊維125を通す案内システムを通過する糸の経路の詳細を示す。枢動ガイドブラケット117は、枢動ガイドブラケット117をフレーム110の中心脚部109上で枢動可能にするスリーブ119上に載置されている。枢動ガイドブラケット117は固定ネジ121で特定の位置に固定されている。[マイロン(Myron):121、図4には図示せず]。枢動ガイドブラケット117は、枢動脚部111、113が設定されている鋭角に従って調整される。枢動ブラケット117は、駆動制御アセンブリパネル130に取り付けられた第2の糸ガイド126へ糸を向ける、ピグテールガイド115と糸ガイド116、118とを含むがこれらに限定されない。この経路内でピグテールガイド115を使用することにより、背景技術の装置におけるアイレットの使用に比べて、動作および待機パッケージの装着/糸張りの容易性が増す。水平載置された糸ガイド116はピグテールガイド115に最も近接して位置決めされているとともに、垂直載置された糸ガイド118はブラケット117の垂直面上に位置決めされている。
【0026】
好適には糸/繊維125はスパンデックスまたはセグメント化ポリウレタンと称されるものから選択される。特に好適なスパンデックスはライクラ(Lycra)(登録商標)の商標名で提供されるとともに、本願特許出願人から入手可能である。ライクラ(Lycra)(登録商標)スパンデックスの好適な等級には、151型および262P型があるがこれらに限定されない。
【0027】
フレーム用組立部品(例えばブラケット117を枢動させる枢動保持アーム120)は、例えば米国バージニア州ウェインズボロ、ノース・ベイヤード・アベニュ(North Bayard Avenue,Waynesboro,Virginia USA)444のインダストリアル・マシン・ワークス(Industrial Machine Works)から入手可能である。モータおよび電気制御ボックス118キャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックス118を構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。
【0028】
図5Aは電気制御ボックス118の正面図である。具体的には図5Aは電気制御ボックス118のアクセスドア144上に載置された、駆動アクセスパネル140と、電力切断スイッチ142と、モード選択スイッチ143とを示す。
【0029】
図5Bは電気制御ボックス118の内部の図を示す。具体的には図5Bは電気制御ボックス118の構成要素用の信号用インターフェース接続を提供する端子ブロック152、156を示す。電気制御ボックス118の主要構成要素の非限定例には、主エンコーダ150(図示せず)、電源154、駆動モータコントローラ153、継電器157、破断検出インターフェース158(図示せず)、およびデジタルコンバータ160があるがこれらに限定されない。これらの構成要素の相互接続を示す概略図が図5Cに提示されている。破断検出インターフェース158および駆動モータコントローラ153は、駆動制御アセンブリ107の破断検出器128および駆動モータ112にそれぞれ電気的に接続されている。主エンコーダ150は外部に設けられていてもよく、破断検出インターフェース158は破断検出器128の一部であってもよい。
【0030】
モータおよび電気制御ボックス118キャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックス118を構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。電気制御キャビネット
【0031】
フレーム110の代替構成(図示せず)は、フレーム上に現存の枢動糸保持アームの各々に対して180°の角度に位置する第2の糸保持アームを載置することもできる。この代替構成により、人が小さい設置面積のフレーム110上に追加糸クリールを手渡すことが可能になるため、製造プロセスで使える状態のより多くの動作および待機パッケージ105を提供することもできる。
【0032】
図6Aは糸の連続巻戻し用OETO装置を示す他の例示的斜視図である。図6Bは図6Aに示された糸を巻戻す装置の例示的上面平面図である。図6Cは図6Aの部品リストである。
【0033】
図6Aの組立部品は、例えば米国バージニア州ウェインズボロ、ノース・ベイヤード・アベニュ(North Bayard Avenue,Waynesboro,Virginia USA)444のインダストリアル・マシン・ワークス(Industrial Machine Works)から入手可能である。組立部品は図6Cの部品リストに「D」番号によって示されている。図6Aのモータおよび電気制御ボックスキャビネットは、例えば米国ニューヨーク州メルビルのマクセス・ロード(Maxess Road,Melville,New York USA)75のMSCインダストリアル・サプライ・カンパニー(Industrial Supply Company)から入手可能である。電気制御ボックスを構成する構成要素は、例えば24012、バージニア州ロアノーク、トラパー・サークルNW(Trapper Circle NW,Roanoke,VA)1225のコントロール・コーポレーション・オブ・アメリカ(Control Corporation of America)から購入可能である。
【0034】
図7〜図12は本発明のOETO装置を用いた試験結果の例示的グラフである。試験に用いた糸/繊維は、スパンデックスまたはセグメント化ポリウレタンと称されるものから選択されている。特に好適なスパンデックスはライクラ(Lycra)(登録商標)の商標名で提供されるとともに、本願特許出願人から入手可能である。ライクラ(Lycra)(登録商標)スパンデックスの好適な等級には、151型および262P型があるがこれらに限定されない。図9、図10および図12の場合、粘着防止添加物の濃度は0.05%〜1%の範囲である。各図の説明文は、フィート/分(FPM)単位の巻戻しおよび巻き取り速度などの試験に特有のパラメータを与えている。各図の説明文は糸のロット番号、試験日付および被験糸の古さも示す。
【0035】
図7は本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。図7に見られるように糸張力701は、約95グラムから始まり試験サイクルの最後に約140グラムまで上昇する。これは糸張力の約47%の増加に相当する。
【0036】
図8は本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。図8に見られるように糸張力801は、約95グラムから始まり試験サイクルの最後に約150グラムまで上昇する。これは糸張力の約58%の増加に相当する。
【0037】
さらに図8のグラフは、180グラムという最大測定値までの糸張力の短いスパイクを示している。また糸をクリールのコアまで巻戻すことができなかった。
【0038】
図9は本発明のOETO装置を用いた、低レベルの粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。図9に見られるように糸張力901は、約100グラムから始まり試験サイクルの最後に約120グラムまで上昇する。これは糸張力の約20%の増加に相当する。これは糸張力に対して比較的一定の値であるが、図9に図示するように、巻戻し方法中になお糸の破断があった。
【0039】
図10は本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。図10に見られるように糸張力1001は、約100グラムから始まり試験サイクルの最後に約120グラムまで上昇する。これは糸張力の約20%の増加に相当する。さらに動作パッケージから待機パッケージへの移動の結果として、巻戻し方法中に糸張力に段階状の急上昇があった。
【0040】
図11は本発明のOETO装置を用いた、巻き戻しパッケージ上の糸に関する張力測定の試験結果を示す例示的グラフである。図11はパッケージ側糸張力1101および機械側糸張力1103の両方を示す。具体的には図11は典型的な巻き戻しパッケージ用のパッケージ側糸張力1101を示す。パッケージ側糸張力は、約80グラムから始まり試験サイクルの最後に約140グラムまで上昇する。これは糸張力の約75%の増加に相当する。
【0041】
図12は本発明の方法および装置で巻戻された、耐粘着性を有する紡糸したままのOETO糸パッケージに関する張力測定試験結果を示す例示的グラフである。図12は望ましい比較的一定の糸張力を示している。図12はパッケージ側糸張力1201および機械側糸張力1203の両方も示している。具体的には図12は、約110グラムから始まり試験サイクルの最後に最大125グラムまでしか上昇しない、パッケージ側糸張力1201を示す。75%の糸張力の増加を示す図11の試験結果に比べて、これらの試験結果は、本発明の巻戻し方法および装置が、糸張力がわずか14%の増加しかしないということを示す。
【0042】
図13は本発明のフレーム110の中心脚部109に対する動作パッケージの構成を示す。図13において動作パッケージ105は、枢動糸ホルダ120(図2)により所望の配向に維持される。枢動糸ホルダ120の直径は、動作パッケージ105の開口芯の直径より小さく、動作パッケージ105が適当に位置決めされた枢動糸ホルダ120上で摺動可能であるとともに、本発明のOETO装置により糸125(図4)を動作パッケージ105から巻戻すことができるようになっている。その後糸125(図4)は巻戻しプロセスのため駆動制御アセンブリ107に向けられる。動作パッケージ105と第1の糸ガイド117との間の距離(d)は、少なくとも約0.34メートルであるとともに好適には約0.91メートル以下であるが、高粘着性繊維と動作するように維持できる。それぞれ動作パッケージ105の回転軸およびオリフィス面に垂直である静止ガイド開口の中心軸に対応する仮想線の交点により画定される鋭角(θ)は、高粘着性繊維との動作の場合0〜約30°に維持することが好ましい。
【0043】
繊維により示される粘着性レベルが増加するにつれて、最大許容角度θは低下する。θの観点で測定されるような、第1の糸ガイド117を通過する際の糸125の方向変化は、約2を超え且つ約7.5未満の粘着性レベルを有する糸の場合、0°〜約30°に、約7.5を超える粘着性レベルを有する糸の場合、0°〜約10°に限定されることが好ましい。より大きい角度は糸ライン張力の過度な変化、延伸、さらには糸破断になる恐れがある。
【0044】
従って上記の試験結果により示されるように、本発明の方法および装置は、比較的小さい設置面積で実施可能であるとともに、背景技術のもつれ、破断、および製造コスト増加の問題を回避することができる、粘着防止添加物を有する糸を巻戻すOETO方法および装置を提供する。
【0045】
上記の説明は本発明を図示するとともに説明している。さらに本開示は本発明の好適な実施形態のみを示すとともに説明しているが、上述したように本発明は様々な他の組合せ、変更例および環境で用いることができるとともに、本明細書に示した発明の概念の範囲内で、上記の教示および/または関連の技術および知識に相応した、変形および変更が可能であることは理解できよう。上記に説明した実施形態は、本発明を実行することについて既知の最良の形態を説明するとともに、当業者が本発明をそのようなまたは他の実施形態で、および本発明の特定の用途または使途により必要とされる様々な変更例と共に利用できるようにすることをさらに意図するものである。したがって説明は本発明を本明細書に開示された形態および用途に限定しようとするものではない。また添付の特許請求の範囲は代替実施形態を含むものと解釈されることを意図するものである。
【図面の簡単な説明】
【0046】
【図1】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図2】図1に示した糸を巻戻す装置の例示的上面平面図である。
【図3】駆動制御アセンブリの例示的詳細図である。
【図4】動作または待機パッケージから駆動ロールまで糸を通す案内システムを通過する糸の経路の例示的詳細斜視図を示す。
【図5A】電気制御ボックスの例示的外観図である。
【図5B】電気制御ボックスの例示的内部である。
【図5C】電気制御ボックスの例示的概略図である。
【図6A−1】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図6A−2】糸の連続巻戻し用OETO装置を示す例示的斜視図である。
【図6B】図6Aに示した糸を巻戻す装置の例示的上面平面図である。
【図6C】図6Aの部品リストである。
【図7】本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す例示的グラフである。
【図8】本発明のOETO装置を用いた、粘着防止添加物のない糸に関する張力測定の試験結果を示す他の例示的グラフである
【図9】本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す例示的グラフである。
【図10】本発明のOETO装置を用いた、粘着防止添加物を有する糸に関する張力測定の試験結果を示す他の例示的グラフである。
【図11】本発明のOETO装置を用いた、巻き戻しパッケージ上の糸に関する張力測定の試験結果を示す例示的グラフである
【図12】本発明のOETO装置で巻戻された紡糸したままの耐粘着性を有するOETO糸パッケージに関する張力測定試験結果を示す例示的グラフである。
【図13】本発明のフレームの中心脚部に対する動作パッケージの構成を示す。
【特許請求の範囲】
【請求項1】
少なくとも1つの枢動脚部が接続されたフレームと、
前記枢動脚部に取り付けられた2つ以上の枢動糸保持アームと、
前記フレームに取り付けられるとともに、前記枢動糸保持アーム上に装着された動作パッケージから糸を連続して巻戻すように構成された駆動制御アセンブリと、
前記フレームに取り付けられた第1の糸ガイドとを備え、
前記枢動脚部が前記フレームに対して鋭角で枢動可能に載置されているとともに、前記第1の糸ガイドが前記動作パッケージから最小距離だけ離れていることを特徴とする、1つまたは複数の動作パッケージから糸を連続して巻戻す装置。
【請求項2】
前記最小距離が少なくとも0.34メートルであることを特徴とする請求項1に記載の装置。
【請求項3】
前記駆動制御アセンブリが、
前記駆動制御アセンブリの前面パネルに取り付けられた分離ロールと、
前記駆動制御アセンブリの前記前面パネルに取り付けられた第2の糸ガイドと、
前記駆動制御アセンブリの前記前面パネルから延びる軸上での回転のために載置された駆動ロールと、
前記駆動ロールを駆動する駆動モータと、
前記駆動制御アセンブリの前記前面パネルに取り付けられた破断センサと、
前記駆動制御アセンブリの前記前面パネルおよび前記フレームのうちの少なくとも一方に取り付けられた第3の糸ガイドとをさらに備えることを特徴とする請求項1に記載の装置。
【請求項4】
前記駆動ロールが、良好な糸対金属接触を確実にする研磨金属表面仕上げを有することを特徴とする請求項3に記載の装置。
【請求項5】
前記駆動ロールと前記分離ロールとが、前記駆動ロール上の糸の多重巻き付けを可能にするように構成されていることを特徴とする請求項3に記載の装置。
【請求項6】
前記駆動制御アセンブリが、前記駆動制御アセンブリに電気的に接続された電気制御ボックスをさらに備えることを特徴とする請求項1に記載の装置。
【請求項7】
前記電気制御ボックスが、
継電器と、
第1の端子ブロックと、
第2の端子ブロックと、
電源スイッチと、
前記第2の端子ブロックと前記継電器とに接続されたデジタルコンバータと、
前記第2の端子ブロックと前記デジタルコンバータとに接続された主エンコーダと、
前記第1の端子ブロックと、第2の端子ブロックと、前記電源スイッチとに接続された駆動モータコントローラと、
前記継電器と前記第2の端子ブロックとに接続された破断検出器インターフェースと、
前記電源スイッチと、デジタルコンバータと、主エンコーダと、駆動モータコントローラと、破断検出器とに接続された電源とをさらに備え、
前記駆動モータコントローラおよび前記破断検出器インターフェースが、前記第1の端子ブロックおよび前記第2の端子ブロックにより、それぞれ前記駆動モータおよび前記破断検出器に電気的に接続されていることを特徴とする請求項6に記載の装置。
【請求項8】
前記第1の糸ガイドの各々が、
前記枢動脚部のポスト部分上での回転のために載置されたスリーブと、
前記スリーブから延びるとともに、少なくとも1つの垂直面と、水平面と、側面とを画定する枢動ガイドブラケットと、
前記枢動ガイドブラケットの前記側面に取り付けられたピグテールガイドと、
前記枢動ブラケットの前記垂直面に取り付けられた垂直載置糸ガイドと、
前記枢動ブラケットの前記水平面に取り付けられた水平載置糸ガイドとをさらに備えることを特徴とする請求項1に記載の装置。
【請求項9】
前記鋭角が約0°〜90°の範囲であることを特徴とする請求項1に記載の装置。
【請求項10】
a.動作パッケージを、少なくとも1つの糸が前記動作パッケージから前記動作パッケージの回転軸と鋭角を画定する方向に巻戻すことができるように、枢動アーム上に保持するステップと、
b.ステップ(a)の前記動作パッケージから制御された所定の速度で糸を巻戻すステップと、
c.前記糸を第1の糸ガイドを通過させることによりステップ(a)の前記糸の前記方向を制御するステップと、
d.前記動作パッケージの前記回転軸により画定される線上で測定された、前記第1の糸ガイドから前記第1の糸ガイドに面する前記動作パッケージの端までの最小距離(d)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、少なくとも約0.34メートルに等しい、または
ii.約7.5を超える粘着性を有する糸の場合、約0.71メートル〜約0.91メートルに等しくなるように、前記距離(d)を制御するステップと、
e.前記動作パッケージの前記回転軸およびオリフィス面に垂直な前記第1の糸ガイドの中心軸にそれぞれ対応する仮想線の交点により画定される角度(θ)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、0°〜約30°に等しい、または
ii.約7.5グラムOETOを超える粘着性レベルを有する糸の場合、0°〜約10°に等しくなるように、前記角度(θ)を制御するステップとを含むことを特徴とする、糸を連続して巻戻す方法。
【請求項1】
少なくとも1つの枢動脚部が接続されたフレームと、
前記枢動脚部に取り付けられた2つ以上の枢動糸保持アームと、
前記フレームに取り付けられるとともに、前記枢動糸保持アーム上に装着された動作パッケージから糸を連続して巻戻すように構成された駆動制御アセンブリと、
前記フレームに取り付けられた第1の糸ガイドとを備え、
前記枢動脚部が前記フレームに対して鋭角で枢動可能に載置されているとともに、前記第1の糸ガイドが前記動作パッケージから最小距離だけ離れていることを特徴とする、1つまたは複数の動作パッケージから糸を連続して巻戻す装置。
【請求項2】
前記最小距離が少なくとも0.34メートルであることを特徴とする請求項1に記載の装置。
【請求項3】
前記駆動制御アセンブリが、
前記駆動制御アセンブリの前面パネルに取り付けられた分離ロールと、
前記駆動制御アセンブリの前記前面パネルに取り付けられた第2の糸ガイドと、
前記駆動制御アセンブリの前記前面パネルから延びる軸上での回転のために載置された駆動ロールと、
前記駆動ロールを駆動する駆動モータと、
前記駆動制御アセンブリの前記前面パネルに取り付けられた破断センサと、
前記駆動制御アセンブリの前記前面パネルおよび前記フレームのうちの少なくとも一方に取り付けられた第3の糸ガイドとをさらに備えることを特徴とする請求項1に記載の装置。
【請求項4】
前記駆動ロールが、良好な糸対金属接触を確実にする研磨金属表面仕上げを有することを特徴とする請求項3に記載の装置。
【請求項5】
前記駆動ロールと前記分離ロールとが、前記駆動ロール上の糸の多重巻き付けを可能にするように構成されていることを特徴とする請求項3に記載の装置。
【請求項6】
前記駆動制御アセンブリが、前記駆動制御アセンブリに電気的に接続された電気制御ボックスをさらに備えることを特徴とする請求項1に記載の装置。
【請求項7】
前記電気制御ボックスが、
継電器と、
第1の端子ブロックと、
第2の端子ブロックと、
電源スイッチと、
前記第2の端子ブロックと前記継電器とに接続されたデジタルコンバータと、
前記第2の端子ブロックと前記デジタルコンバータとに接続された主エンコーダと、
前記第1の端子ブロックと、第2の端子ブロックと、前記電源スイッチとに接続された駆動モータコントローラと、
前記継電器と前記第2の端子ブロックとに接続された破断検出器インターフェースと、
前記電源スイッチと、デジタルコンバータと、主エンコーダと、駆動モータコントローラと、破断検出器とに接続された電源とをさらに備え、
前記駆動モータコントローラおよび前記破断検出器インターフェースが、前記第1の端子ブロックおよび前記第2の端子ブロックにより、それぞれ前記駆動モータおよび前記破断検出器に電気的に接続されていることを特徴とする請求項6に記載の装置。
【請求項8】
前記第1の糸ガイドの各々が、
前記枢動脚部のポスト部分上での回転のために載置されたスリーブと、
前記スリーブから延びるとともに、少なくとも1つの垂直面と、水平面と、側面とを画定する枢動ガイドブラケットと、
前記枢動ガイドブラケットの前記側面に取り付けられたピグテールガイドと、
前記枢動ブラケットの前記垂直面に取り付けられた垂直載置糸ガイドと、
前記枢動ブラケットの前記水平面に取り付けられた水平載置糸ガイドとをさらに備えることを特徴とする請求項1に記載の装置。
【請求項9】
前記鋭角が約0°〜90°の範囲であることを特徴とする請求項1に記載の装置。
【請求項10】
a.動作パッケージを、少なくとも1つの糸が前記動作パッケージから前記動作パッケージの回転軸と鋭角を画定する方向に巻戻すことができるように、枢動アーム上に保持するステップと、
b.ステップ(a)の前記動作パッケージから制御された所定の速度で糸を巻戻すステップと、
c.前記糸を第1の糸ガイドを通過させることによりステップ(a)の前記糸の前記方向を制御するステップと、
d.前記動作パッケージの前記回転軸により画定される線上で測定された、前記第1の糸ガイドから前記第1の糸ガイドに面する前記動作パッケージの端までの最小距離(d)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、少なくとも約0.34メートルに等しい、または
ii.約7.5を超える粘着性を有する糸の場合、約0.71メートル〜約0.91メートルに等しくなるように、前記距離(d)を制御するステップと、
e.前記動作パッケージの前記回転軸およびオリフィス面に垂直な前記第1の糸ガイドの中心軸にそれぞれ対応する仮想線の交点により画定される角度(θ)が、
i.約2グラムOETOを超え且つ約7.5グラムOETO未満の粘着性を有する糸の場合、0°〜約30°に等しい、または
ii.約7.5グラムOETOを超える粘着性レベルを有する糸の場合、0°〜約10°に等しくなるように、前記角度(θ)を制御するステップとを含むことを特徴とする、糸を連続して巻戻す方法。
【図1】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6A−1】
【図6A−2】
【図6B】
【図6C】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6A−1】
【図6A−2】
【図6B】
【図6C】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公表番号】特表2008−506609(P2008−506609A)
【公表日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2007−521705(P2007−521705)
【出願日】平成17年7月15日(2005.7.15)
【国際出願番号】PCT/US2005/025327
【国際公開番号】WO2006/025955
【国際公開日】平成18年3月9日(2006.3.9)
【出願人】(505245302)インヴィスタ テクノロジー エスアエルエル (81)
【氏名又は名称原語表記】INVISTA Technologies S.a.r.l.
【住所又は居所原語表記】Talstrasse 80,8001 Zurich,Switzerland
【Fターム(参考)】
【公表日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成17年7月15日(2005.7.15)
【国際出願番号】PCT/US2005/025327
【国際公開番号】WO2006/025955
【国際公開日】平成18年3月9日(2006.3.9)
【出願人】(505245302)インヴィスタ テクノロジー エスアエルエル (81)
【氏名又は名称原語表記】INVISTA Technologies S.a.r.l.
【住所又は居所原語表記】Talstrasse 80,8001 Zurich,Switzerland
【Fターム(参考)】
[ Back to top ]