
連続遠心分離機
【課題】
試料ラインに空気が混入したか否かを容易に検出できる連続遠心分離機を提供する。
【解決手段】
試料を分離するためのロータ120と、ロータを回転させる駆動手段130と、回転中にロータ120に試料を連続的に供給および排出させるための流路を設けた試料ライン170、175を備えた連続遠心分離機1において、試料ラインの供給側(170)および/又は排出側(175)にエア検出センサ179、180と、試料ラインに混入したエアを外部に排出させるエア排出手段(181、182)を設けた。エア排出手段は、例えば電磁式の三方弁で構成でき、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるように切り替えられる。
試料ラインに空気が混入したか否かを容易に検出できる連続遠心分離機を提供する。
【解決手段】
試料を分離するためのロータ120と、ロータを回転させる駆動手段130と、回転中にロータ120に試料を連続的に供給および排出させるための流路を設けた試料ライン170、175を備えた連続遠心分離機1において、試料ラインの供給側(170)および/又は排出側(175)にエア検出センサ179、180と、試料ラインに混入したエアを外部に排出させるエア排出手段(181、182)を設けた。エア排出手段は、例えば電磁式の三方弁で構成でき、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるように切り替えられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料を連続的に流して液体試料中の粒子をロータ内で遠心分離する連続遠心分離機に関し、特にロータへの試料供給手段および試料ラインに混入したエア(空気)を効率的に排出できるエア排出手段を有する連続遠心分離機に関する。
【背景技術】
【0002】
遠心分離機は、通常の重力場では沈降しないもしくは沈降しにくい粒子を分離するもので、例えばウィルスや菌体などが分離対象に含まれる。ウィルスや菌体は、薬品やワクチンなどの製造にとっては欠かせない原料であり、これらの製造過程において原料を分離精製する設備として連続遠心分離機が広く使用される。連続遠心分離機は、高速回転するロータおよびその上下に接続される貫通穴を有した2本の回転軸等とロータに試料を供給するための試料供給部を有する。
【0003】
試料供給部は、試料を供給するための送液ポンプや流量計および圧力計をシリコンチューブなどで接続したシステムや、例えば特許文献1に記載のように試料ラインを蒸気滅菌可能な構成にしたシステムが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−21121号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
連続遠心分離機が回転中は、ロータ内は完全に液体で満たされている必要がある。液体が完全に満たされていない状態で運転を行なうとロータはアンバランス状態となって過大な振動が発生する恐れがあり好ましくない。最悪な場合は、連続遠心分離機は異常振動となり運転停止させなければならない。
【0006】
また、試料ラインに空気が留まっていると、試料注入時の試料ラインの圧力が高くなり、所定の流量で試料を注入できなくなってしまう恐れがある。そのため試料ラインに留まっている空気を取り除くことが重要となる。
【0007】
連続遠心分離機に用いられる試料ラインの配管は、シリコンチューブのように透明又は半透明なチューブを使用する場合と、ゴムパイプや金属パイプのように内部が見えない配管を使用する場合がある。試料ラインの配管をシリコンチューブのように半透明なチューブを使用した場合、試料ラインに空気があるかどうかは目視で確認することができるので、シリコンチューブを摘んで試料ラインの圧力を一旦高くしてから解放したりするなどの操作者によるマニュアル操作によって空気を試料ラインから排出することができる。
【0008】
しかしながら、ゴムパイプや金属パイプのように内部が見えない配管を使用する場合はどの部分に空気があるかを目視できない上に、金属パイプの場合は、摘んで試料ラインの圧力を高くする等の操作ができない。一方、特許文献1に示すような試料ラインを蒸気滅菌可能な構成にしたシステムの場合、蒸気滅菌に耐えるために一般的にはステンレスなどの金属配管を使用せざるを得ず、シリコンチューブのような半透明なチューブを使用することは難しく、目視で空気の有無を判断することは不可能であるといえる。
【0009】
本発明は上記背景に鑑みてなされたもので、その目的は、試料ラインに空気が混入したか否かを容易に検出できる連続遠心分離機を提供することにある。
【0010】
本発明の他の目的は、試料ラインの空気を確実に排出する自動化システムを有する連続遠心分離機を提供することにある。
【0011】
本発明のさらに他の目的は、試料ラインの蒸気滅菌、試料の注入、遠心分離、遠心分離後の回収、洗浄に至る工程を自動化した連続遠心分離機を提供することにある。
【課題を解決するための手段】
【0012】
本願において開示される発明のうち代表的なものの特徴を説明すれば次の通りである。
【0013】
本発明の一つの特徴によれば、試料を分離するためのロータと、ロータが収納される遠心室と、ロータを回転させる駆動手段と、ロータの回転中にロータに試料を連続的に供給および排出させるための流路を設けた試料ラインを備えた連続遠心分離機において、試料ラインの供給側および/または排出側にエア検出センサを設けた。また、試料ラインの供給側および排出側の流路に、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるエア排出手段を設けた。エア排出手段は、流路を外部に分岐させる制御バルブと、エア検出センサの出力に応じて制御バルブの開閉制御を行なう制御部を含んで構成される。制御バルブは、例えば電動で流路を変更または遮断させる電磁バルブや、高圧空気で流路を変更または遮断させる空気動作バルブ等を用いることができる。
【0014】
本発明の他の特徴によれば、制御部は、ロータへの試料の供給および排出も制御し、制御部はエア検出センサの出力に応じて供給側流路および排出側流路から試料又は廃液を外部に排出させるように制御バルブを制御する。また、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入していることを検出したら、制御バルブの流路方向を変更して、試料又は廃液を外部に排出させるように制御する。さらに、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入している時間が所定以上経過したらアラームを発する。
【0015】
本発明のさらに他の特徴によれば、試料を分離するためのロータと、ロータが収納される遠心室と、ロータを回転させる駆動手段と、ロータの回転中にロータに試料を連続的に供給および排出させるための試料ラインと、運転状態の表示を行なう表示部を備えた連続遠心分離機において、試料ラインの供給側および排出側にエア検出センサを設け、エア検出センサによるエア検出の有無を表示部にそれぞれ表示し、遠心分離運転中にエアの混入を検出したら表示部にアラーム表示を行なうように構成した。
【発明の効果】
【0016】
請求項1の発明によれば、連続遠心分離機において試料ラインの供給側および排出側にエア検出センサを設けたので、ロータ内を確実に液体で満たすことを確認でき、連続遠心分離機を安全に運転することができる。
【0017】
請求項2の発明によれば、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるエア排出手段を設けたので、試料ラインの途中において空気を外部に排出することができ、ロータおよび試料ライン内を確実に液体で満たすことができる。
【0018】
請求項3の発明によれば、エア排出手段は、流路を外部に分岐させる制御バルブと、エア検出センサの出力に応じて制御バルブの開閉制御を行なう制御部を含むので、試料ラインに混入したエアを電気的な制御によって自動的に外部に排出することができる。
【0019】
請求項4の発明によれば、制御部はエア検出センサの出力に応じて供給側流路および排出側流路から試料又は廃液を外部に排出させるように制御バルブを制御するので、試料ラインの空気を確実に排出することができ、ロータに注入する流量を所定の流量に保つことができる。
【0020】
請求項5の発明によれば、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入していることを検出したら、制御バルブの流路方向を変更するように制御できるので、混入したエアを自動制御にて排出することができる。
【0021】
請求項6の発明によれば、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入している時間が所定以上経過したらアラームを発するので、送液自体の異常が発生した場合等の特殊な異常状態を迅速に識別することができる。
【0022】
請求項7の発明によれば、試料ラインには、送液ポンプと、供給および排出の方向切り替え機能を有する方向切り替えバルブを設けたので、いわゆる下側供給と上側供給の双方の場合における試料ラインのエア排出を行なうことができる。
【0023】
請求項8の発明によれば、試料ラインの供給側および排出側にエア検出センサを設け、エア検出の有無を表示部にそれぞれ表示するので、操作者は試料ラインにおけるエアの混入状態を容易に識別することができる。
【0024】
請求項9の発明によれば、遠心分離運転中にエアの混入を検出したら表示部にアラーム表示されるので、操作者は空気混入時に適切な対応を迅速に行なうことができる。
【0025】
請求項10の発明によれば、連続遠心分離機において試料ラインにエア検出センサを設けたので、ロータ内を確実に液体で満たすことを確認でき、連続遠心分離機を安全に運転することができる。
【0026】
本発明の上記および他の目的ならびに新規な特徴は、以下の明細書の記載および図面から明らかになるであろう。
【図面の簡単な説明】
【0027】
【図1】本発明の実施例に係る連続遠心分離機1の全体を示す斜視図である。
【図2】図1の遠心分離部100の詳細構造を示す断面図と、試料循環部の配管図である。
【図3】図1の操作パネル205に表示される画面例を示す図である。
【図4】本実施例の連続遠心分離機1の制御ブロック図である。
【図5】本実施例の送液ユニット230を用いた送液チェック手順を示すフローチャートである。
【発明を実施するための形態】
【実施例1】
【0028】
以下、本発明の実施例を図面に基づいて説明する。なお、以下の図において、同一の部分には同一の符号を付し、繰り返しの説明は省略する。
【0029】
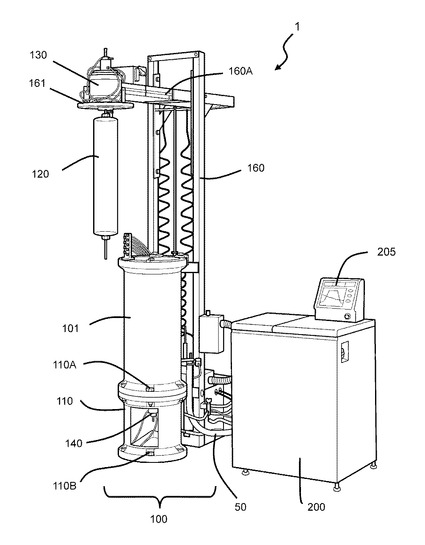
図1は、本実施例に係る連続遠心分離機1の全体を示す斜視図である。図1に示されるように連続遠心分離機1は、ワクチン製造工程などに使用されるいわゆる“連続超遠心分離機”であり、遠心分離部100と制御装置部200の2つの主要部分から構成される。遠心分離部100と制御装置部200との間は配線・配管群50で接続される。
【0030】
遠心分離部100は、遠心室となる円筒状のチャンバ101と、チャンバ101を支持するベース110と、チャンバ101の内部に出し入れ自由に収容されて高速回転するロータ120と、チャンバ101の上部に配置されてロータ120を吊り下げた状態でこれを回転駆動する駆動部130と、チャンバ101の下側に取り付けられる下部軸受部140と、駆動部130を上下および前後方向に移動させるためのリフト160およびアーム160Aと、ロータ120に試料又は滅菌液を連続的に供給・排出する試料循環部170(図2参照)を有して構成される。チャンバ101の内部には、駆動部130に吊り下げられたロータ120が収容される。
【0031】
ロータ120は高速で回転駆動されるため、運転時の大気との風損や摩擦熱による発熱を抑える目的で遠心分離中はチャンバ101の内部を減圧された状態に保たれる。チャンバ101の内部を減圧された状態にするために、チャンバ101内の空気を排出する図示せぬ排出口がチャンバ101の胴部に形成され、図示しない真空ポンプが接続される。チャンバ101は複数のボルト110Aでベース110に固定され、ベース110は複数のボルト110Bにより床面に固定される。
【0032】
制御装置部200には、チャンバ101内部の遠心室全体を冷却するための図示せぬ冷却装置、チャンバ101内部の遠心室を減圧された状態にするための図示せぬ真空ポンプ、ロータ120を所定の場所に移動させるための図示せぬリフト駆動装置、ロータ120を駆動制御する図示せぬ遠心機コントローラ(制御部)等が収容される。制御装置部200の上部には、操作・入力する箇所である操作パネル205が配置される。制御部は、図示しないマイクロコンピュータ、記憶装置を含んだ電子回路で構成され、ロータ120を駆動制御だけでなく連続遠心分離機全体の制御を行なう。
【0033】
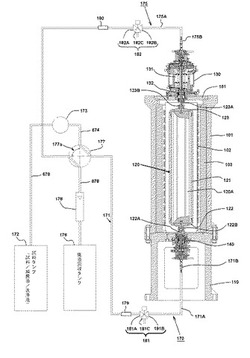
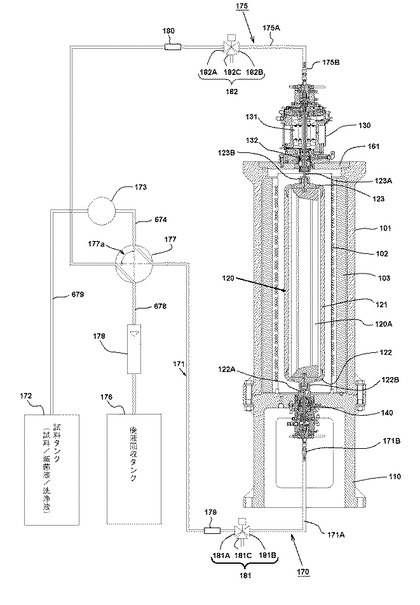
図2は図1の遠心分離部100の詳細構造を示す断面図である。チャンバ101は、その内部に駆動部130に吊り下げられたロータ120が収容され、ロータ120の周囲を覆うように円筒型のエバポレータ(蒸発配管)102が設置され、エバポレータ102の外側には円筒型のプロテクタ103が設置される。プロテクタ103は、ロータ120が回転中に何らかの原因でロータ120が破壊されるようなことがあった場合であっても、その破片や試料が外部に飛び出すことなくチャンバ101内部に留めておくために設置され、防護壁の役割を果たすものである。エバポレータ102は、チャンバ101の内部を冷やすことができるように冷媒ガスを循環させる銅配管で構成されており、チャンバ101の内部を冷却可能である。
【0034】
ロータ120は、円筒型のロータボディ121と、ロータボディ121の上下にねじ込み式で取り付けられる上部ロータカバー123および下部ロータカバー122を含んで構成される。駆動部130は、リフト160(図1参照)と一体の後述するアッパープレート161に取り付けられ、モータ131、軸受部132等で構成されている。モータ131は、アッパーシャフト123Aを回転軸とし、軸受部132は、モータ131の上下においてアッパーシャフト123Aを回転可能に支持する。アッパーシャフト123Aの下端部にナット123Bによって上部ロータカバー123が取り付けられるため、ロータ120は駆動部130から吊り下げられる。
【0035】
上部ロータカバー123および下部ロータカバー122のそれぞれの軸心位置には試料通過孔がそれぞれ形成されており、上部ロータカバー123および下部ロータカバー122には、回転軸部であるアッパーシャフト123Aとロアシャフト122Aとが取り付けられる。アッパーシャフト123Aとロアシャフト122Aとのそれぞれの軸中心には、上部通路および下部通路である試料通過孔がそれぞれ貫通しており、これらの試料通過孔は、上部ロータカバー123および下部ロータカバー122のそれぞれに形成された試料通過孔に連通する。駆動部130に含まれるモータ131の駆動によってアッパーシャフト123Aが高速回転されることにより、アッパーシャフト123Aに取り付けられるロータ120およびロータ120にナット122Bによって取り付けられるロアシャフト122Aがともに高速回転する。
【0036】
また、ロータ120の内部には、出し入れ可能なコア120Aが配置され、遠心分離を行なう際は、ロアシャフト122Aから注入される試料が、試料通過孔を通過してロータ120の内部に導入され、ロータ120内に導入された試料は、コア120Aによって高遠心力場へ移動されて沈殿と上清とに分離され、上清(廃液)は、アッパーシャフト123Aの試料通過孔から排出される。
【0037】
試料循環部170は、ロータ120、ロアシャフト122A、アッパーシャフト123A、下側パイプ171と、試料タンク172と、送液ポンプ173と、上側パイプ175と、廃液回収タンク176と、方向切り替えバルブ177と、流量センサ178と、下側エア検出センサ179と、上側エア検出センサ180と、下側三方弁181と、上側三方弁182により主に構成される。
【0038】
下側パイプ171は下部軸受部140と方向切り替えバルブ177との間を接続し下部軸受部140との間に下側接続パイプ171Aを配置され、連続遠心分離機1と接続する側には下側コネクタ171Bを有する。また、上側パイプ175は駆動部130と方向切り替えバルブ177との間を接続し駆動部130との間に上側接続パイプ175Aが配置され、連続遠心分離機1と接続する側には上側コネクタ175Bを有する。下部軸受部140は、ベース110のチャンバ101と当接する位置に設けられる。
【0039】
試料タンク172はロータ120で遠心分離する試料が蓄えられ、送液ポンプ173によって試料を圧送する。送液ポンプ173によって圧送された試料は方向切り替えバルブ177の方向設定によって下側パイプ171か上側パイプ175に送られるかが決定する。ここで、図2に示す図では、方向切り替えバルブ177の設定は下側パイプ171に試料を圧送する向きになっていることを示しており、方向切り替えバルブ177を通過した試料は、下部軸受部140を通過してロータ120内に流入して遠心分離され、ロータ120で分離された試料の上清は、駆動部130を通り、方向切り替えバルブ177を通過して廃液回収タンク176に回収される。
【0040】
一方、方向切り替えバルブ177を図2の状態から矢印177aの方向に90度回転させることにより、送液ポンプ173によって圧送された洗浄液や滅菌液は、駆動部130を通過してロータ120内に流入し、ロータ120で分離された洗浄液や滅菌液の廃液は、下部軸受部140を通り、方向切り替えバルブ177を通過して廃液回収タンク176に回収される。
【0041】
方向切り替えバルブ177と廃液回収タンク176の間には流量センサ178が挿入される。流量センサ178は、廃液回収タンク176に流入する単位時間あたりの液体の容量を測定するセンサであり、公知の流量センサを用いることができる。本実施例では、試料タンク172から廃液回収タンク176までの一連のライン(流路)を“試料ライン”と定義する。
【0042】
下側パイプ171の一部には下側エア検出センサ179と、下側三方弁181が挿入される。エア検出センサは、例えば流路上に液体が存在するかどうかを検出するセンサであり、例えば、光を流路の一方の側壁側から光をかざして、それを対岸の側壁に設けた光センサにより受光し、その光の強弱により流路に液体が存在するかを判断するセンサである。この下側エア検出センサ179は、逆の見方をすれば液体検出センサともなるが、検出の方法は任意であり、流路の特定位置において液体で満たされているか、あるいは空気が混入しているか(空気で満たされているか)が検出できれば良い。下側三方弁181は、制御部からその開閉が制御可能な制御バルブであって、本実施例では電磁式の三方弁である。通常、下側三方弁181は通路181Aと通路181Bが連通しており、試料タンク172からロータ120側に試料が流れるような流路が形成される。下側三方弁181を切り替えることによって、通路181A又は通路181Bを、エアを外部に排出させるための通路181Cに接続させることができる。
【0043】
上側パイプ175の一部には上側エア検出センサ180と、上側三方弁182が挿入される。上側エア検出センサは180、下側エア検出センサ179と同じ部品を用いることができる。制御部からその開閉が制御可能な制御バルブである上側三方弁182は電磁式の三方弁であり、通常、上側三方弁182は通路182Aと通路182Bが連通しており、ロータ120から廃液回収タンク176側に遠心分離後の上澄み液が流れるように流路が形成される。上側三方弁182を切り替えることによって、通路182A又は通路182Bを、エアを外部に排出させるための通路182Cに接続させることができる。
【0044】
送液ポンプ173によって試料タンク172に入っている試料をロータ120に注入する際は、方向切り替えバルブ177を下側に切り替え、下側パイプ171側から試料を注入する。この際、まず下側エア検出センサ179によってロータ120への試料注入開始を検出することができ、さらにロータ120内が試料によって満たされオーバーフローしたかどうかを上側エア検出センサ180で検出することができる。これらの検出は後述する制御部(図4の送液コントローラ240)によって制御される。
【0045】
下側エア検出センサ179と上側エア検出センサ180の両方で空気を検出しないことが確認されると、制御部はロータ120内に試料が充填されたと判断し、ロータ120の回転を開始することが可能となる。なお、図3の例では上側三方弁182の廃液回収タンク176側に上側エア検出センサ180を配置したが、これを上側三方弁182からロータ120側に隣接して配置するようにしても良い。さらに、上側エア検出センサ180を2組準備して、上側三方弁182を挟むようにその両側に配置しても良い。このようなエア検出センサの配置は、下側三方弁181側にも同様に適用できる。
【0046】
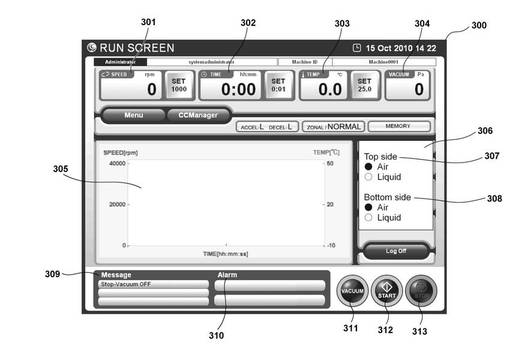
図3は操作パネル205での表示例を示す図である。操作パネル205は、例えばタッチセンサ式の液晶表示画面で構成され、表示画面300の上側には、ロータ120の回転速度表示部301(単位:rpm)、経過時間表示部302(単位:時:分)、チャンバ内温度表示部303(単位:℃)、チャンバ内真空度表示部304(単位:Pa)が設けられる。
【0047】
回転速度表示部301、経過時間表示部302およびチャンバ内温度表示部303の各表示部には、左側に現在の状態を表示する領域と、右側に設定状態を表示する領域が設けられる。表示画面300の中央部には、ロータ120の回転速度と温度の推移を時間経過と対応させて表示するためのトレンド表示部305が設けられる。図3では、横軸を時間とし、縦軸にロータの回転速度とロータの温度としたグラフが表示される例を示している(但し、図3では遠心分離運転開始前なので何も表示されていない)。このグラフ表示によって操作者は、ロータ120の回転速度と温度の推移が正常であるか否かを即座に認識できる。
【0048】
トレンド表示部305の右側の領域には、上側エア検出センサ180と下側エア検出センサ179による検出状態を表示するための送液状態表示部306が設けられる。送液状態表示部306には上側エア検出センサ180での検出状態を“Top Side”307として表示する。ここでは上側エア検出センサ180の検出結果が、空気の存在を示す“Air”か、液体の存在を示す“Liquid”のいずれかであるかが黒丸で示される。図3では、上側エア検出センサ180部分には空気が存在することを示している。同様にして、“Top Side”307の下には、下側エア検出センサ179での検出状態を“Bottom Side”308として表示される。図3では、下側エア検出センサ179部分には空気が存在することを示している。
【0049】
トレンド表示部305の下側の領域には、操作者へ伝達するメッセージを表示するためのメッセージ表示部309と、何らかの異常が起こった際に操作者への警告を表示するためのアラーム表示部310が設けられる。図3の例では、メッセージ表示部309に、真空ポンプが停止中であることを示す“Stop−Vacuum−OFF”とのメッセージが表示されており、このようなメッセージによって操作者は運転中の状態を認識できる。さらに、表示画面300の右下部には、チャンバ101内を減圧するため図示せぬ真空ポンプを駆動するための真空ボタン311と、ロータ120の回転を開始させるためのスタートボタン312と、回転中のロータ120を停止させるためのストップボタン313が表示される。
【0050】
なお、図3に示す表示画面は一例であり、操作パネル205には様々な操作画面を表示することができる。また、図3ではグレースケールにて示したが、実際にはカラー表示するようにすれば、視認性に優れて使い勝手の良い操作パネル205を実現できる。さらに、スピーカーやブザー等の音響装置を設けるようにして、操作パネル205の操作にあわせてタッチ音を出したり、何らかのアラーム表示の際にアラーム音を出すようにしても良い。
【0051】
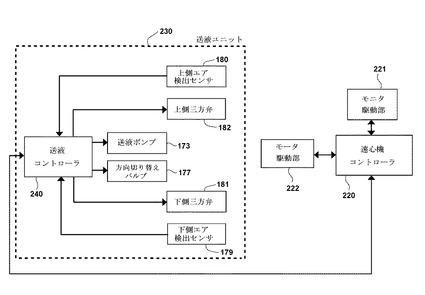
次に図4を用いて本実施例の連続遠心分離機1の制御ブロック図を説明する。連続遠心分離機1の全体の制御は、制御装置部200の内部に格納される遠心機コントローラ220により制御される。遠心機コントローラ220には、図示しないマイクロコンピュータが含まれ、図示しない複数のプログラムを実行することにより様々な制御を行なう。また、遠心機コントローラ220の内部には、一次記憶装置および二次記憶装置や、外部の機器と通信を行なうための通信機器などが含まれる。
【0052】
遠心機コントローラ220にはモニタ駆動部221が接続される。モニタ駆動部221は、表示画面300への情報の表示と、表示画面300にタッチされた位置を検出してその位置情報を遠心機コントローラ220に出力する。モータ駆動部222は、モータ131に所定の駆動電流を供給することによりモータ131を所定の回転速度で回転させる。モータ131に、ブラシレスDCモータを用いる場合には、モータ駆動部222にインバータ回路を含めると良い。モータ131の起動、加速、定速回転、減速、停止などの指示は遠心機コントローラ220により行われる。
【0053】
送液ユニット230は、試料タンク172からの試料、滅菌液、洗浄液等の送出を行なう送液ポンプ173と、試料を下側パイプ171又は上側パイプ175のいずれかに流すかを切り替えるための方向切り替えバルブ177と、送液ポンプ173によって送出された液体に混入したエアを排出するためのエア排出手段が設けられる。エア排出手段は、送液コントローラ240と、下側三方弁181と、上側三方弁182と、下側エア検出センサ179と、上側エア検出センサ180により構成される。送液コントローラ240は、送液ポンプ173の駆動および方向切り替えバルブ177の制御に加えて、下側エア検出センサ179および上側エア検出センサ180の出力に応じて下側三方弁181と上側三方弁182の制御を行なう。本実施例では、送液コントローラ240が遠心機コントローラ220とは独立して自律的にエア排出を制御するように構成してが、送液コントローラ240を独立して設けずに、遠心機コントローラ220が送液コントローラ240の役割を兼任するように構成しても良い。
【0054】
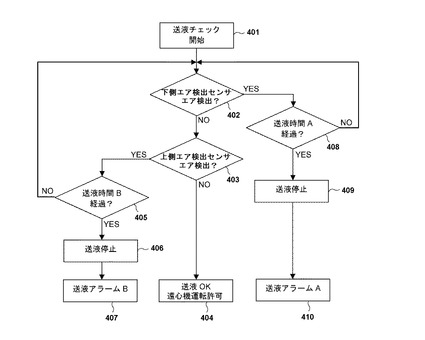
次に図5のフローチャートを用いて、送液コントローラ240を用いた送液チェック手順を説明する。図5に示す手順は、送液コントローラ240に含まれるマイクロプロセッサによりコンピュータプログラムを実行してソフトウェアによって実現することができる。また、この送液チェック手順は、遠心機コントローラ220によるモータ駆動部222の制御や、図示しない冷却装置の制御、モニタ駆動部221の制御等と並列に実行されるものである。
【0055】
まず操作者が試料タンク172に液体を入れ、廃液回収タンク176をセットし、方向切り替えバルブ177を図2の状態(下側供給)にセットしてから送液ポンプ173を駆動させて送液を開始する。送液が開始されると、送液コントローラ240は図5のフローチャートの実行を行なう(ステップ401)。
【0056】
試料が注入されると、送液コントローラ240は下側エア検出センサ179がエアの存在を検出したかを判定する(ステップ402)。試料の送液直後の場合は、下側エア検出センサ179までの配管の長さと送液ポンプ173の流量から所定の時間が経過するまでは、下側エア検出センサ179がエアを検出する状態となる。そこでステップ402でエアを検出した場合は、次に送液に必要とされる許容時間、即ち送液時間Aが経過したかを判定する(ステップ408)。送液時間Aが経過していなければステップ402に戻る。ここで送液が順調に行わる場合は送液時間Aに到達する前に下側エア検出センサ179部分にエアが存在しないようになるはずである。
【0057】
ステップ408において、送液時間A(例えば30秒など、)が経過してもエアを検出したままの場合、送液ポンプ173など試料ラインのどこかに問題があると判断し、送液コントローラ240は送液を停止し(ステップ409)、操作者に対して送液状態が異常である旨の送液アラームAを発するとともに、遠心機コントローラ220に送液異常が発生した旨の報告を行なう(ステップ410)。
【0058】
ステップ402で送液時間Aに到達する前に下側エア検出センサ179部分に液体が到達したら、次に上側エア検出センサ180がエアの存在を検出したかを判定する(ステップ403)。液体がロータ120に送液された直後は、ロータ120の内部に液体が満たされ、ロータ120から上側エア検出センサ180までの配管を通過するまでは、上側エア検出センサ180がエアを検出する状態となる。そこでステップ403でエアを検出した場合は(ステップ403)、次に送液に必要とされる許容時間、即ち送液時間Bが経過したかを判定する(ステップ405)。
【0059】
送液時間Bが経過していなければステップ402に戻る。ここで送液が順調に行わる場合は送液時間Bに到達する前に上側エア検出センサ180部分にエアが存在しないようになるので(ステップ405、403)、送液が正常な状態「送液OK」となり、遠心機の運転許可の状態となる(ステップ404)。なお、「送液OK」の状態となったときにどのような制御をするかは任意に設定できる。例えば、「送液OK」となったら自動的にロータ120の回転を開始させるようにして、いわゆるオートスタート機能を設けるようにしても良い。また、「送液OK」となったら表示部にその旨を表示して、操作者にスタートボタン312のタッチ(又は押下)を促すように構成しても良い。送液OKの表示の際には、画面表示に加えて音により操作者に注意を促すようにすると好ましい。
【0060】
ステップ405において、送液時間B(ロータ120の容量と送液ポンプ173の流量から時間を決定する)が経過してもエアを検出したままの場合、ロータ120内部で試料が漏れている可能性が高いと判断し、送液コントローラ240は送液を停止し(ステップ406)、操作者に対して送液状態が異常である旨の送液アラームBを発するとともに、遠心機コントローラ220に送液異常が発生した旨の報告を行なう(ステップ410)。
【0061】
以上説明したような送液チェック手順が実行されたのちに、ステップ404の状態の後に遠心機の運転が開始される。運転の開始後に、下側エア検出センサ179と上側エア検出センサ180が空気を検出しない状態になり、正常にロータ120を回転させた後は、さらに試料を連続してロータ120に注入する必要があるが、その際、試料ラインに空気が入っていると、試料ラインの圧力が上がり所定の流量で試料を注入できなくなる場合がある。例えば、試料タンク172が複数本準備されており、接続中の試料タンク172が空になって次の試料タンク172に切り替えるような場合である。そのような場合は、試料ラインの空気を十分に抜くことが重要となる。
【0062】
そこで、試料ラインに設置された下側エア検出センサ179と上側エア検出センサ180が空気を検出したときは、送液コントローラ240は、その近傍に配置した下側三方弁181と上側三方弁182から空気を排出するように制御を行なう。下側三方弁181の空気排出ラインとなる通路181Cと、上側三方弁182の空気排出ラインとなる通路182Cは、廃液回収タンク176又は図示していないドレン用配管に接続される。
【0063】
下側パイプ171の内部の空気を排出するには、まず方向切り替えバルブ177を下側パイプ171側から注入させるように設定し、下側エア検出センサ179で空気を検出したら通路181Bを閉じ、181Aから181Cのラインへ空気(気泡を含む試料)を排出する。下側エア検出センサ179で空気が検出されなくなったら通路181Cを閉じ、181Aから181Bのラインに戻す。
【0064】
上側パイプ175の内部の空気を排出するには、方向切り替えバルブ177を上側パイプ175側から注入させるように設定し、上側エア検出センサ180で空気を検出したら通路182Bを閉じ、182Aから182Cのラインへ空気(気泡を含む試料)を排出する。上側エア検出センサ180で空気が検出されなくなったら通路182Cを閉じ、182Aから182Bのラインに戻す。
【0065】
上記のようにエア検出センサと三方弁の組み合わせによる制御を、方向切り替えバルブ177の方向を下側/上側に数回切り替え実行することによって、試料ラインに留まっている空気を確実に排出することができ、連続遠心分離機を安定して運転することができる。さらに、本実施例のように試料ラインに直接配置する下側エア検出センサ179、上側エア検出センサ180ならば、センサを取り外すことなく滅菌や洗浄も行なうことができるので、特殊な取り扱いが不要であり大変使い勝手が良い。
【0066】
以上、本発明を実施例に基づいて説明したが、本発明は上述の実施例に限定されるものではなく、その趣旨を逸脱しない範囲内で種々の変更が可能である。例えば、上述の実施例では液体を下側パイプ171からロータ120へ入れる場合の例で説明したが、それだけに限られずに、洗浄液等を上側パイプ175側からロータ120に入れて、下側パイプ171から廃液回収タンク176に回収する場合であっても同様に適用できる。その場合は、センサと制御バルブの位置(どちらをロータ120に近い側に配置するか)を変えるようにすると良い。また、図5のフローチャートを実行するのは送液コントローラ240でなく、遠心機コントローラ220が直接実行するように構成しても良い。
【0067】
さらに、三方弁の代わりにエア検出センサと連動した空気排出用の専用の制御バルブを設けて、エアが存在したら空気排出用バルブにてエアを排出するように構成しても良い。
【符号の説明】
【0068】
1 連続遠心分離機 50 配線・配管群 100 遠心分離部
101 チャンバ 102 エバポレータ 103 プロテクタ
110 ベース 110A ボルト 110B ボルト
120 ロータ 120A コア 121 ロータボディ
122 下部ロータカバー 122A ロアシャフト
122B ナット 123 上部ロータカバー
123A アッパーシャフト 123B ナット
130 駆動部 131 モータ
132 軸受部 140 下部軸受部
160 リフト 160A アーム
161 アッパープレート 170 試料循環部
171 下側パイプ 171A 下側接続パイプ
171B 下側コネクタ 172 試料タンク
173 送液ポンプ 175 上側パイプ
175A 上側接続パイプ 175B 上側コネクタ
176 廃液回収タンク 177 方向切り替えバルブ
178 流量センサ 179 下側エア検出センサ
180 上側エア検出センサ 181 下側三方弁
181A、181B、181C 通路 182 上側三方弁
182A、182B、182C 通路 200 制御装置部
205 操作パネル 220 遠心機コントローラ
221 モニタ駆動部 222 モータ駆動部
230 送液ユニット 240 送液コントローラ
300 表示画面 301 回転速度表示部
302 経過時間表示部 303 チャンバ内温度表示部
304 チャンバ内真空度表示部 305 トレンド表示部
306 送液状態表示部 307 “Top Side”
308 “Bottom Side” 309 メッセージ表示部
310 アラーム表示部 311 真空ボタン
312 スタートボタン 313 ストップボタン
【技術分野】
【0001】
本発明は、試料を連続的に流して液体試料中の粒子をロータ内で遠心分離する連続遠心分離機に関し、特にロータへの試料供給手段および試料ラインに混入したエア(空気)を効率的に排出できるエア排出手段を有する連続遠心分離機に関する。
【背景技術】
【0002】
遠心分離機は、通常の重力場では沈降しないもしくは沈降しにくい粒子を分離するもので、例えばウィルスや菌体などが分離対象に含まれる。ウィルスや菌体は、薬品やワクチンなどの製造にとっては欠かせない原料であり、これらの製造過程において原料を分離精製する設備として連続遠心分離機が広く使用される。連続遠心分離機は、高速回転するロータおよびその上下に接続される貫通穴を有した2本の回転軸等とロータに試料を供給するための試料供給部を有する。
【0003】
試料供給部は、試料を供給するための送液ポンプや流量計および圧力計をシリコンチューブなどで接続したシステムや、例えば特許文献1に記載のように試料ラインを蒸気滅菌可能な構成にしたシステムが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−21121号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
連続遠心分離機が回転中は、ロータ内は完全に液体で満たされている必要がある。液体が完全に満たされていない状態で運転を行なうとロータはアンバランス状態となって過大な振動が発生する恐れがあり好ましくない。最悪な場合は、連続遠心分離機は異常振動となり運転停止させなければならない。
【0006】
また、試料ラインに空気が留まっていると、試料注入時の試料ラインの圧力が高くなり、所定の流量で試料を注入できなくなってしまう恐れがある。そのため試料ラインに留まっている空気を取り除くことが重要となる。
【0007】
連続遠心分離機に用いられる試料ラインの配管は、シリコンチューブのように透明又は半透明なチューブを使用する場合と、ゴムパイプや金属パイプのように内部が見えない配管を使用する場合がある。試料ラインの配管をシリコンチューブのように半透明なチューブを使用した場合、試料ラインに空気があるかどうかは目視で確認することができるので、シリコンチューブを摘んで試料ラインの圧力を一旦高くしてから解放したりするなどの操作者によるマニュアル操作によって空気を試料ラインから排出することができる。
【0008】
しかしながら、ゴムパイプや金属パイプのように内部が見えない配管を使用する場合はどの部分に空気があるかを目視できない上に、金属パイプの場合は、摘んで試料ラインの圧力を高くする等の操作ができない。一方、特許文献1に示すような試料ラインを蒸気滅菌可能な構成にしたシステムの場合、蒸気滅菌に耐えるために一般的にはステンレスなどの金属配管を使用せざるを得ず、シリコンチューブのような半透明なチューブを使用することは難しく、目視で空気の有無を判断することは不可能であるといえる。
【0009】
本発明は上記背景に鑑みてなされたもので、その目的は、試料ラインに空気が混入したか否かを容易に検出できる連続遠心分離機を提供することにある。
【0010】
本発明の他の目的は、試料ラインの空気を確実に排出する自動化システムを有する連続遠心分離機を提供することにある。
【0011】
本発明のさらに他の目的は、試料ラインの蒸気滅菌、試料の注入、遠心分離、遠心分離後の回収、洗浄に至る工程を自動化した連続遠心分離機を提供することにある。
【課題を解決するための手段】
【0012】
本願において開示される発明のうち代表的なものの特徴を説明すれば次の通りである。
【0013】
本発明の一つの特徴によれば、試料を分離するためのロータと、ロータが収納される遠心室と、ロータを回転させる駆動手段と、ロータの回転中にロータに試料を連続的に供給および排出させるための流路を設けた試料ラインを備えた連続遠心分離機において、試料ラインの供給側および/または排出側にエア検出センサを設けた。また、試料ラインの供給側および排出側の流路に、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるエア排出手段を設けた。エア排出手段は、流路を外部に分岐させる制御バルブと、エア検出センサの出力に応じて制御バルブの開閉制御を行なう制御部を含んで構成される。制御バルブは、例えば電動で流路を変更または遮断させる電磁バルブや、高圧空気で流路を変更または遮断させる空気動作バルブ等を用いることができる。
【0014】
本発明の他の特徴によれば、制御部は、ロータへの試料の供給および排出も制御し、制御部はエア検出センサの出力に応じて供給側流路および排出側流路から試料又は廃液を外部に排出させるように制御バルブを制御する。また、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入していることを検出したら、制御バルブの流路方向を変更して、試料又は廃液を外部に排出させるように制御する。さらに、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入している時間が所定以上経過したらアラームを発する。
【0015】
本発明のさらに他の特徴によれば、試料を分離するためのロータと、ロータが収納される遠心室と、ロータを回転させる駆動手段と、ロータの回転中にロータに試料を連続的に供給および排出させるための試料ラインと、運転状態の表示を行なう表示部を備えた連続遠心分離機において、試料ラインの供給側および排出側にエア検出センサを設け、エア検出センサによるエア検出の有無を表示部にそれぞれ表示し、遠心分離運転中にエアの混入を検出したら表示部にアラーム表示を行なうように構成した。
【発明の効果】
【0016】
請求項1の発明によれば、連続遠心分離機において試料ラインの供給側および排出側にエア検出センサを設けたので、ロータ内を確実に液体で満たすことを確認でき、連続遠心分離機を安全に運転することができる。
【0017】
請求項2の発明によれば、エア検出センサの出力に応じて試料ラインに混入したエアを外部に排出させるエア排出手段を設けたので、試料ラインの途中において空気を外部に排出することができ、ロータおよび試料ライン内を確実に液体で満たすことができる。
【0018】
請求項3の発明によれば、エア排出手段は、流路を外部に分岐させる制御バルブと、エア検出センサの出力に応じて制御バルブの開閉制御を行なう制御部を含むので、試料ラインに混入したエアを電気的な制御によって自動的に外部に排出することができる。
【0019】
請求項4の発明によれば、制御部はエア検出センサの出力に応じて供給側流路および排出側流路から試料又は廃液を外部に排出させるように制御バルブを制御するので、試料ラインの空気を確実に排出することができ、ロータに注入する流量を所定の流量に保つことができる。
【0020】
請求項5の発明によれば、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入していることを検出したら、制御バルブの流路方向を変更するように制御できるので、混入したエアを自動制御にて排出することができる。
【0021】
請求項6の発明によれば、制御部は、エア検出センサの出力により供給側流路又は排出側流路にエアが混入している時間が所定以上経過したらアラームを発するので、送液自体の異常が発生した場合等の特殊な異常状態を迅速に識別することができる。
【0022】
請求項7の発明によれば、試料ラインには、送液ポンプと、供給および排出の方向切り替え機能を有する方向切り替えバルブを設けたので、いわゆる下側供給と上側供給の双方の場合における試料ラインのエア排出を行なうことができる。
【0023】
請求項8の発明によれば、試料ラインの供給側および排出側にエア検出センサを設け、エア検出の有無を表示部にそれぞれ表示するので、操作者は試料ラインにおけるエアの混入状態を容易に識別することができる。
【0024】
請求項9の発明によれば、遠心分離運転中にエアの混入を検出したら表示部にアラーム表示されるので、操作者は空気混入時に適切な対応を迅速に行なうことができる。
【0025】
請求項10の発明によれば、連続遠心分離機において試料ラインにエア検出センサを設けたので、ロータ内を確実に液体で満たすことを確認でき、連続遠心分離機を安全に運転することができる。
【0026】
本発明の上記および他の目的ならびに新規な特徴は、以下の明細書の記載および図面から明らかになるであろう。
【図面の簡単な説明】
【0027】
【図1】本発明の実施例に係る連続遠心分離機1の全体を示す斜視図である。
【図2】図1の遠心分離部100の詳細構造を示す断面図と、試料循環部の配管図である。
【図3】図1の操作パネル205に表示される画面例を示す図である。
【図4】本実施例の連続遠心分離機1の制御ブロック図である。
【図5】本実施例の送液ユニット230を用いた送液チェック手順を示すフローチャートである。
【発明を実施するための形態】
【実施例1】
【0028】
以下、本発明の実施例を図面に基づいて説明する。なお、以下の図において、同一の部分には同一の符号を付し、繰り返しの説明は省略する。
【0029】
図1は、本実施例に係る連続遠心分離機1の全体を示す斜視図である。図1に示されるように連続遠心分離機1は、ワクチン製造工程などに使用されるいわゆる“連続超遠心分離機”であり、遠心分離部100と制御装置部200の2つの主要部分から構成される。遠心分離部100と制御装置部200との間は配線・配管群50で接続される。
【0030】
遠心分離部100は、遠心室となる円筒状のチャンバ101と、チャンバ101を支持するベース110と、チャンバ101の内部に出し入れ自由に収容されて高速回転するロータ120と、チャンバ101の上部に配置されてロータ120を吊り下げた状態でこれを回転駆動する駆動部130と、チャンバ101の下側に取り付けられる下部軸受部140と、駆動部130を上下および前後方向に移動させるためのリフト160およびアーム160Aと、ロータ120に試料又は滅菌液を連続的に供給・排出する試料循環部170(図2参照)を有して構成される。チャンバ101の内部には、駆動部130に吊り下げられたロータ120が収容される。
【0031】
ロータ120は高速で回転駆動されるため、運転時の大気との風損や摩擦熱による発熱を抑える目的で遠心分離中はチャンバ101の内部を減圧された状態に保たれる。チャンバ101の内部を減圧された状態にするために、チャンバ101内の空気を排出する図示せぬ排出口がチャンバ101の胴部に形成され、図示しない真空ポンプが接続される。チャンバ101は複数のボルト110Aでベース110に固定され、ベース110は複数のボルト110Bにより床面に固定される。
【0032】
制御装置部200には、チャンバ101内部の遠心室全体を冷却するための図示せぬ冷却装置、チャンバ101内部の遠心室を減圧された状態にするための図示せぬ真空ポンプ、ロータ120を所定の場所に移動させるための図示せぬリフト駆動装置、ロータ120を駆動制御する図示せぬ遠心機コントローラ(制御部)等が収容される。制御装置部200の上部には、操作・入力する箇所である操作パネル205が配置される。制御部は、図示しないマイクロコンピュータ、記憶装置を含んだ電子回路で構成され、ロータ120を駆動制御だけでなく連続遠心分離機全体の制御を行なう。
【0033】
図2は図1の遠心分離部100の詳細構造を示す断面図である。チャンバ101は、その内部に駆動部130に吊り下げられたロータ120が収容され、ロータ120の周囲を覆うように円筒型のエバポレータ(蒸発配管)102が設置され、エバポレータ102の外側には円筒型のプロテクタ103が設置される。プロテクタ103は、ロータ120が回転中に何らかの原因でロータ120が破壊されるようなことがあった場合であっても、その破片や試料が外部に飛び出すことなくチャンバ101内部に留めておくために設置され、防護壁の役割を果たすものである。エバポレータ102は、チャンバ101の内部を冷やすことができるように冷媒ガスを循環させる銅配管で構成されており、チャンバ101の内部を冷却可能である。
【0034】
ロータ120は、円筒型のロータボディ121と、ロータボディ121の上下にねじ込み式で取り付けられる上部ロータカバー123および下部ロータカバー122を含んで構成される。駆動部130は、リフト160(図1参照)と一体の後述するアッパープレート161に取り付けられ、モータ131、軸受部132等で構成されている。モータ131は、アッパーシャフト123Aを回転軸とし、軸受部132は、モータ131の上下においてアッパーシャフト123Aを回転可能に支持する。アッパーシャフト123Aの下端部にナット123Bによって上部ロータカバー123が取り付けられるため、ロータ120は駆動部130から吊り下げられる。
【0035】
上部ロータカバー123および下部ロータカバー122のそれぞれの軸心位置には試料通過孔がそれぞれ形成されており、上部ロータカバー123および下部ロータカバー122には、回転軸部であるアッパーシャフト123Aとロアシャフト122Aとが取り付けられる。アッパーシャフト123Aとロアシャフト122Aとのそれぞれの軸中心には、上部通路および下部通路である試料通過孔がそれぞれ貫通しており、これらの試料通過孔は、上部ロータカバー123および下部ロータカバー122のそれぞれに形成された試料通過孔に連通する。駆動部130に含まれるモータ131の駆動によってアッパーシャフト123Aが高速回転されることにより、アッパーシャフト123Aに取り付けられるロータ120およびロータ120にナット122Bによって取り付けられるロアシャフト122Aがともに高速回転する。
【0036】
また、ロータ120の内部には、出し入れ可能なコア120Aが配置され、遠心分離を行なう際は、ロアシャフト122Aから注入される試料が、試料通過孔を通過してロータ120の内部に導入され、ロータ120内に導入された試料は、コア120Aによって高遠心力場へ移動されて沈殿と上清とに分離され、上清(廃液)は、アッパーシャフト123Aの試料通過孔から排出される。
【0037】
試料循環部170は、ロータ120、ロアシャフト122A、アッパーシャフト123A、下側パイプ171と、試料タンク172と、送液ポンプ173と、上側パイプ175と、廃液回収タンク176と、方向切り替えバルブ177と、流量センサ178と、下側エア検出センサ179と、上側エア検出センサ180と、下側三方弁181と、上側三方弁182により主に構成される。
【0038】
下側パイプ171は下部軸受部140と方向切り替えバルブ177との間を接続し下部軸受部140との間に下側接続パイプ171Aを配置され、連続遠心分離機1と接続する側には下側コネクタ171Bを有する。また、上側パイプ175は駆動部130と方向切り替えバルブ177との間を接続し駆動部130との間に上側接続パイプ175Aが配置され、連続遠心分離機1と接続する側には上側コネクタ175Bを有する。下部軸受部140は、ベース110のチャンバ101と当接する位置に設けられる。
【0039】
試料タンク172はロータ120で遠心分離する試料が蓄えられ、送液ポンプ173によって試料を圧送する。送液ポンプ173によって圧送された試料は方向切り替えバルブ177の方向設定によって下側パイプ171か上側パイプ175に送られるかが決定する。ここで、図2に示す図では、方向切り替えバルブ177の設定は下側パイプ171に試料を圧送する向きになっていることを示しており、方向切り替えバルブ177を通過した試料は、下部軸受部140を通過してロータ120内に流入して遠心分離され、ロータ120で分離された試料の上清は、駆動部130を通り、方向切り替えバルブ177を通過して廃液回収タンク176に回収される。
【0040】
一方、方向切り替えバルブ177を図2の状態から矢印177aの方向に90度回転させることにより、送液ポンプ173によって圧送された洗浄液や滅菌液は、駆動部130を通過してロータ120内に流入し、ロータ120で分離された洗浄液や滅菌液の廃液は、下部軸受部140を通り、方向切り替えバルブ177を通過して廃液回収タンク176に回収される。
【0041】
方向切り替えバルブ177と廃液回収タンク176の間には流量センサ178が挿入される。流量センサ178は、廃液回収タンク176に流入する単位時間あたりの液体の容量を測定するセンサであり、公知の流量センサを用いることができる。本実施例では、試料タンク172から廃液回収タンク176までの一連のライン(流路)を“試料ライン”と定義する。
【0042】
下側パイプ171の一部には下側エア検出センサ179と、下側三方弁181が挿入される。エア検出センサは、例えば流路上に液体が存在するかどうかを検出するセンサであり、例えば、光を流路の一方の側壁側から光をかざして、それを対岸の側壁に設けた光センサにより受光し、その光の強弱により流路に液体が存在するかを判断するセンサである。この下側エア検出センサ179は、逆の見方をすれば液体検出センサともなるが、検出の方法は任意であり、流路の特定位置において液体で満たされているか、あるいは空気が混入しているか(空気で満たされているか)が検出できれば良い。下側三方弁181は、制御部からその開閉が制御可能な制御バルブであって、本実施例では電磁式の三方弁である。通常、下側三方弁181は通路181Aと通路181Bが連通しており、試料タンク172からロータ120側に試料が流れるような流路が形成される。下側三方弁181を切り替えることによって、通路181A又は通路181Bを、エアを外部に排出させるための通路181Cに接続させることができる。
【0043】
上側パイプ175の一部には上側エア検出センサ180と、上側三方弁182が挿入される。上側エア検出センサは180、下側エア検出センサ179と同じ部品を用いることができる。制御部からその開閉が制御可能な制御バルブである上側三方弁182は電磁式の三方弁であり、通常、上側三方弁182は通路182Aと通路182Bが連通しており、ロータ120から廃液回収タンク176側に遠心分離後の上澄み液が流れるように流路が形成される。上側三方弁182を切り替えることによって、通路182A又は通路182Bを、エアを外部に排出させるための通路182Cに接続させることができる。
【0044】
送液ポンプ173によって試料タンク172に入っている試料をロータ120に注入する際は、方向切り替えバルブ177を下側に切り替え、下側パイプ171側から試料を注入する。この際、まず下側エア検出センサ179によってロータ120への試料注入開始を検出することができ、さらにロータ120内が試料によって満たされオーバーフローしたかどうかを上側エア検出センサ180で検出することができる。これらの検出は後述する制御部(図4の送液コントローラ240)によって制御される。
【0045】
下側エア検出センサ179と上側エア検出センサ180の両方で空気を検出しないことが確認されると、制御部はロータ120内に試料が充填されたと判断し、ロータ120の回転を開始することが可能となる。なお、図3の例では上側三方弁182の廃液回収タンク176側に上側エア検出センサ180を配置したが、これを上側三方弁182からロータ120側に隣接して配置するようにしても良い。さらに、上側エア検出センサ180を2組準備して、上側三方弁182を挟むようにその両側に配置しても良い。このようなエア検出センサの配置は、下側三方弁181側にも同様に適用できる。
【0046】
図3は操作パネル205での表示例を示す図である。操作パネル205は、例えばタッチセンサ式の液晶表示画面で構成され、表示画面300の上側には、ロータ120の回転速度表示部301(単位:rpm)、経過時間表示部302(単位:時:分)、チャンバ内温度表示部303(単位:℃)、チャンバ内真空度表示部304(単位:Pa)が設けられる。
【0047】
回転速度表示部301、経過時間表示部302およびチャンバ内温度表示部303の各表示部には、左側に現在の状態を表示する領域と、右側に設定状態を表示する領域が設けられる。表示画面300の中央部には、ロータ120の回転速度と温度の推移を時間経過と対応させて表示するためのトレンド表示部305が設けられる。図3では、横軸を時間とし、縦軸にロータの回転速度とロータの温度としたグラフが表示される例を示している(但し、図3では遠心分離運転開始前なので何も表示されていない)。このグラフ表示によって操作者は、ロータ120の回転速度と温度の推移が正常であるか否かを即座に認識できる。
【0048】
トレンド表示部305の右側の領域には、上側エア検出センサ180と下側エア検出センサ179による検出状態を表示するための送液状態表示部306が設けられる。送液状態表示部306には上側エア検出センサ180での検出状態を“Top Side”307として表示する。ここでは上側エア検出センサ180の検出結果が、空気の存在を示す“Air”か、液体の存在を示す“Liquid”のいずれかであるかが黒丸で示される。図3では、上側エア検出センサ180部分には空気が存在することを示している。同様にして、“Top Side”307の下には、下側エア検出センサ179での検出状態を“Bottom Side”308として表示される。図3では、下側エア検出センサ179部分には空気が存在することを示している。
【0049】
トレンド表示部305の下側の領域には、操作者へ伝達するメッセージを表示するためのメッセージ表示部309と、何らかの異常が起こった際に操作者への警告を表示するためのアラーム表示部310が設けられる。図3の例では、メッセージ表示部309に、真空ポンプが停止中であることを示す“Stop−Vacuum−OFF”とのメッセージが表示されており、このようなメッセージによって操作者は運転中の状態を認識できる。さらに、表示画面300の右下部には、チャンバ101内を減圧するため図示せぬ真空ポンプを駆動するための真空ボタン311と、ロータ120の回転を開始させるためのスタートボタン312と、回転中のロータ120を停止させるためのストップボタン313が表示される。
【0050】
なお、図3に示す表示画面は一例であり、操作パネル205には様々な操作画面を表示することができる。また、図3ではグレースケールにて示したが、実際にはカラー表示するようにすれば、視認性に優れて使い勝手の良い操作パネル205を実現できる。さらに、スピーカーやブザー等の音響装置を設けるようにして、操作パネル205の操作にあわせてタッチ音を出したり、何らかのアラーム表示の際にアラーム音を出すようにしても良い。
【0051】
次に図4を用いて本実施例の連続遠心分離機1の制御ブロック図を説明する。連続遠心分離機1の全体の制御は、制御装置部200の内部に格納される遠心機コントローラ220により制御される。遠心機コントローラ220には、図示しないマイクロコンピュータが含まれ、図示しない複数のプログラムを実行することにより様々な制御を行なう。また、遠心機コントローラ220の内部には、一次記憶装置および二次記憶装置や、外部の機器と通信を行なうための通信機器などが含まれる。
【0052】
遠心機コントローラ220にはモニタ駆動部221が接続される。モニタ駆動部221は、表示画面300への情報の表示と、表示画面300にタッチされた位置を検出してその位置情報を遠心機コントローラ220に出力する。モータ駆動部222は、モータ131に所定の駆動電流を供給することによりモータ131を所定の回転速度で回転させる。モータ131に、ブラシレスDCモータを用いる場合には、モータ駆動部222にインバータ回路を含めると良い。モータ131の起動、加速、定速回転、減速、停止などの指示は遠心機コントローラ220により行われる。
【0053】
送液ユニット230は、試料タンク172からの試料、滅菌液、洗浄液等の送出を行なう送液ポンプ173と、試料を下側パイプ171又は上側パイプ175のいずれかに流すかを切り替えるための方向切り替えバルブ177と、送液ポンプ173によって送出された液体に混入したエアを排出するためのエア排出手段が設けられる。エア排出手段は、送液コントローラ240と、下側三方弁181と、上側三方弁182と、下側エア検出センサ179と、上側エア検出センサ180により構成される。送液コントローラ240は、送液ポンプ173の駆動および方向切り替えバルブ177の制御に加えて、下側エア検出センサ179および上側エア検出センサ180の出力に応じて下側三方弁181と上側三方弁182の制御を行なう。本実施例では、送液コントローラ240が遠心機コントローラ220とは独立して自律的にエア排出を制御するように構成してが、送液コントローラ240を独立して設けずに、遠心機コントローラ220が送液コントローラ240の役割を兼任するように構成しても良い。
【0054】
次に図5のフローチャートを用いて、送液コントローラ240を用いた送液チェック手順を説明する。図5に示す手順は、送液コントローラ240に含まれるマイクロプロセッサによりコンピュータプログラムを実行してソフトウェアによって実現することができる。また、この送液チェック手順は、遠心機コントローラ220によるモータ駆動部222の制御や、図示しない冷却装置の制御、モニタ駆動部221の制御等と並列に実行されるものである。
【0055】
まず操作者が試料タンク172に液体を入れ、廃液回収タンク176をセットし、方向切り替えバルブ177を図2の状態(下側供給)にセットしてから送液ポンプ173を駆動させて送液を開始する。送液が開始されると、送液コントローラ240は図5のフローチャートの実行を行なう(ステップ401)。
【0056】
試料が注入されると、送液コントローラ240は下側エア検出センサ179がエアの存在を検出したかを判定する(ステップ402)。試料の送液直後の場合は、下側エア検出センサ179までの配管の長さと送液ポンプ173の流量から所定の時間が経過するまでは、下側エア検出センサ179がエアを検出する状態となる。そこでステップ402でエアを検出した場合は、次に送液に必要とされる許容時間、即ち送液時間Aが経過したかを判定する(ステップ408)。送液時間Aが経過していなければステップ402に戻る。ここで送液が順調に行わる場合は送液時間Aに到達する前に下側エア検出センサ179部分にエアが存在しないようになるはずである。
【0057】
ステップ408において、送液時間A(例えば30秒など、)が経過してもエアを検出したままの場合、送液ポンプ173など試料ラインのどこかに問題があると判断し、送液コントローラ240は送液を停止し(ステップ409)、操作者に対して送液状態が異常である旨の送液アラームAを発するとともに、遠心機コントローラ220に送液異常が発生した旨の報告を行なう(ステップ410)。
【0058】
ステップ402で送液時間Aに到達する前に下側エア検出センサ179部分に液体が到達したら、次に上側エア検出センサ180がエアの存在を検出したかを判定する(ステップ403)。液体がロータ120に送液された直後は、ロータ120の内部に液体が満たされ、ロータ120から上側エア検出センサ180までの配管を通過するまでは、上側エア検出センサ180がエアを検出する状態となる。そこでステップ403でエアを検出した場合は(ステップ403)、次に送液に必要とされる許容時間、即ち送液時間Bが経過したかを判定する(ステップ405)。
【0059】
送液時間Bが経過していなければステップ402に戻る。ここで送液が順調に行わる場合は送液時間Bに到達する前に上側エア検出センサ180部分にエアが存在しないようになるので(ステップ405、403)、送液が正常な状態「送液OK」となり、遠心機の運転許可の状態となる(ステップ404)。なお、「送液OK」の状態となったときにどのような制御をするかは任意に設定できる。例えば、「送液OK」となったら自動的にロータ120の回転を開始させるようにして、いわゆるオートスタート機能を設けるようにしても良い。また、「送液OK」となったら表示部にその旨を表示して、操作者にスタートボタン312のタッチ(又は押下)を促すように構成しても良い。送液OKの表示の際には、画面表示に加えて音により操作者に注意を促すようにすると好ましい。
【0060】
ステップ405において、送液時間B(ロータ120の容量と送液ポンプ173の流量から時間を決定する)が経過してもエアを検出したままの場合、ロータ120内部で試料が漏れている可能性が高いと判断し、送液コントローラ240は送液を停止し(ステップ406)、操作者に対して送液状態が異常である旨の送液アラームBを発するとともに、遠心機コントローラ220に送液異常が発生した旨の報告を行なう(ステップ410)。
【0061】
以上説明したような送液チェック手順が実行されたのちに、ステップ404の状態の後に遠心機の運転が開始される。運転の開始後に、下側エア検出センサ179と上側エア検出センサ180が空気を検出しない状態になり、正常にロータ120を回転させた後は、さらに試料を連続してロータ120に注入する必要があるが、その際、試料ラインに空気が入っていると、試料ラインの圧力が上がり所定の流量で試料を注入できなくなる場合がある。例えば、試料タンク172が複数本準備されており、接続中の試料タンク172が空になって次の試料タンク172に切り替えるような場合である。そのような場合は、試料ラインの空気を十分に抜くことが重要となる。
【0062】
そこで、試料ラインに設置された下側エア検出センサ179と上側エア検出センサ180が空気を検出したときは、送液コントローラ240は、その近傍に配置した下側三方弁181と上側三方弁182から空気を排出するように制御を行なう。下側三方弁181の空気排出ラインとなる通路181Cと、上側三方弁182の空気排出ラインとなる通路182Cは、廃液回収タンク176又は図示していないドレン用配管に接続される。
【0063】
下側パイプ171の内部の空気を排出するには、まず方向切り替えバルブ177を下側パイプ171側から注入させるように設定し、下側エア検出センサ179で空気を検出したら通路181Bを閉じ、181Aから181Cのラインへ空気(気泡を含む試料)を排出する。下側エア検出センサ179で空気が検出されなくなったら通路181Cを閉じ、181Aから181Bのラインに戻す。
【0064】
上側パイプ175の内部の空気を排出するには、方向切り替えバルブ177を上側パイプ175側から注入させるように設定し、上側エア検出センサ180で空気を検出したら通路182Bを閉じ、182Aから182Cのラインへ空気(気泡を含む試料)を排出する。上側エア検出センサ180で空気が検出されなくなったら通路182Cを閉じ、182Aから182Bのラインに戻す。
【0065】
上記のようにエア検出センサと三方弁の組み合わせによる制御を、方向切り替えバルブ177の方向を下側/上側に数回切り替え実行することによって、試料ラインに留まっている空気を確実に排出することができ、連続遠心分離機を安定して運転することができる。さらに、本実施例のように試料ラインに直接配置する下側エア検出センサ179、上側エア検出センサ180ならば、センサを取り外すことなく滅菌や洗浄も行なうことができるので、特殊な取り扱いが不要であり大変使い勝手が良い。
【0066】
以上、本発明を実施例に基づいて説明したが、本発明は上述の実施例に限定されるものではなく、その趣旨を逸脱しない範囲内で種々の変更が可能である。例えば、上述の実施例では液体を下側パイプ171からロータ120へ入れる場合の例で説明したが、それだけに限られずに、洗浄液等を上側パイプ175側からロータ120に入れて、下側パイプ171から廃液回収タンク176に回収する場合であっても同様に適用できる。その場合は、センサと制御バルブの位置(どちらをロータ120に近い側に配置するか)を変えるようにすると良い。また、図5のフローチャートを実行するのは送液コントローラ240でなく、遠心機コントローラ220が直接実行するように構成しても良い。
【0067】
さらに、三方弁の代わりにエア検出センサと連動した空気排出用の専用の制御バルブを設けて、エアが存在したら空気排出用バルブにてエアを排出するように構成しても良い。
【符号の説明】
【0068】
1 連続遠心分離機 50 配線・配管群 100 遠心分離部
101 チャンバ 102 エバポレータ 103 プロテクタ
110 ベース 110A ボルト 110B ボルト
120 ロータ 120A コア 121 ロータボディ
122 下部ロータカバー 122A ロアシャフト
122B ナット 123 上部ロータカバー
123A アッパーシャフト 123B ナット
130 駆動部 131 モータ
132 軸受部 140 下部軸受部
160 リフト 160A アーム
161 アッパープレート 170 試料循環部
171 下側パイプ 171A 下側接続パイプ
171B 下側コネクタ 172 試料タンク
173 送液ポンプ 175 上側パイプ
175A 上側接続パイプ 175B 上側コネクタ
176 廃液回収タンク 177 方向切り替えバルブ
178 流量センサ 179 下側エア検出センサ
180 上側エア検出センサ 181 下側三方弁
181A、181B、181C 通路 182 上側三方弁
182A、182B、182C 通路 200 制御装置部
205 操作パネル 220 遠心機コントローラ
221 モニタ駆動部 222 モータ駆動部
230 送液ユニット 240 送液コントローラ
300 表示画面 301 回転速度表示部
302 経過時間表示部 303 チャンバ内温度表示部
304 チャンバ内真空度表示部 305 トレンド表示部
306 送液状態表示部 307 “Top Side”
308 “Bottom Side” 309 メッセージ表示部
310 アラーム表示部 311 真空ボタン
312 スタートボタン 313 ストップボタン
【特許請求の範囲】
【請求項1】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインを備えた連続遠心分離機において、
前記試料ラインの供給側および排出側にエア検出センサを設けたことを特徴とする連続遠心分離機。
【請求項2】
前記試料ラインの供給側および排出側の流路に、前記エア検出センサの出力に応じて前記試料ラインに混入したエアを外部に排出させるエア排出手段を設けたことを特徴とする請求項1に記載の連続遠心分離機。
【請求項3】
前記エア排出手段は、流路を外部に分岐させる制御バルブと、前記エア検出センサの出力に応じて前記制御バルブの開閉制御を行なう制御部を含むことを特徴とする請求項2に記載の連続遠心分離機。
【請求項4】
前記制御部は、前記ロータへの試料の供給および排出も制御し、
前記制御部は前記エア検出センサの出力に応じて前記供給側流路および前記排出側流路から試料又は廃液を外部に排出させるように前記制御バルブを制御することを特徴とする請求項3に記載の連続遠心分離機。
【請求項5】
前記制御部は、前記エア検出センサの出力により前記供給側流路又は前記排出側流路にエアが混入していることを検出したら、前記制御バルブの流路方向を変更して、試料又は廃液を外部に排出させるように制御することを特徴とする請求項4に記載の連続遠心分離機。
【請求項6】
前記制御部は、前記エア検出センサの出力により前記供給側流路又は前記排出側流路にエアが混入している時間が所定以上経過したらアラームを発することを特徴とする請求項5に記載の連続遠心分離機。
【請求項7】
前記試料ラインには、送液ポンプと、供給および排出の方向切り替え機能を有する方向切り替えバルブを設けたことを特徴とする請求項1から6のいずれか一項に記載の連続遠心分離機。
【請求項8】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインと、運転状態の表示を行なう表示部を備えた連続遠心分離機において、
前記試料ラインの供給側および排出側にエア検出センサを設け、
前記エア検出センサによるエア検出の有無を前記表示部にそれぞれ表示することを特徴とする連続遠心分離機。
【請求項9】
遠心分離の運転中に前記エア検出センサによってエアの混入を検出したら前記表示部にアラーム表示を行なうことを特徴とする請求項8に記載の連続遠心分離機。
【請求項10】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインを備えた連続遠心分離機において、
前記試料ラインにエア検出センサを設けたことを特徴とする連続遠心分離機。
【請求項1】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインを備えた連続遠心分離機において、
前記試料ラインの供給側および排出側にエア検出センサを設けたことを特徴とする連続遠心分離機。
【請求項2】
前記試料ラインの供給側および排出側の流路に、前記エア検出センサの出力に応じて前記試料ラインに混入したエアを外部に排出させるエア排出手段を設けたことを特徴とする請求項1に記載の連続遠心分離機。
【請求項3】
前記エア排出手段は、流路を外部に分岐させる制御バルブと、前記エア検出センサの出力に応じて前記制御バルブの開閉制御を行なう制御部を含むことを特徴とする請求項2に記載の連続遠心分離機。
【請求項4】
前記制御部は、前記ロータへの試料の供給および排出も制御し、
前記制御部は前記エア検出センサの出力に応じて前記供給側流路および前記排出側流路から試料又は廃液を外部に排出させるように前記制御バルブを制御することを特徴とする請求項3に記載の連続遠心分離機。
【請求項5】
前記制御部は、前記エア検出センサの出力により前記供給側流路又は前記排出側流路にエアが混入していることを検出したら、前記制御バルブの流路方向を変更して、試料又は廃液を外部に排出させるように制御することを特徴とする請求項4に記載の連続遠心分離機。
【請求項6】
前記制御部は、前記エア検出センサの出力により前記供給側流路又は前記排出側流路にエアが混入している時間が所定以上経過したらアラームを発することを特徴とする請求項5に記載の連続遠心分離機。
【請求項7】
前記試料ラインには、送液ポンプと、供給および排出の方向切り替え機能を有する方向切り替えバルブを設けたことを特徴とする請求項1から6のいずれか一項に記載の連続遠心分離機。
【請求項8】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインと、運転状態の表示を行なう表示部を備えた連続遠心分離機において、
前記試料ラインの供給側および排出側にエア検出センサを設け、
前記エア検出センサによるエア検出の有無を前記表示部にそれぞれ表示することを特徴とする連続遠心分離機。
【請求項9】
遠心分離の運転中に前記エア検出センサによってエアの混入を検出したら前記表示部にアラーム表示を行なうことを特徴とする請求項8に記載の連続遠心分離機。
【請求項10】
試料を分離するためのロータと、該ロータが収納される遠心室と、前記ロータを回転させる駆動手段と、前記ロータの回転中に前記ロータに試料を連続的に供給および排出させるための試料ラインを備えた連続遠心分離機において、
前記試料ラインにエア検出センサを設けたことを特徴とする連続遠心分離機。
【図1】


【図2】
【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2013−22473(P2013−22473A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−156298(P2011−156298)
【出願日】平成23年7月15日(2011.7.15)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月15日(2011.7.15)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
[ Back to top ]