
連続非侵襲血圧デバイスからの信号を強化し分析する装置及び方法
血圧信号を強化するシステム及び方法が開示される。フォトプレスチモグラフィ(PPG)システムによって手指の動脈の体積を測定する。PPGシステムはPPG信号を生成する。このPPGシステムはカフの内部に配置されており、PPG信号によってカフの圧力が制御される。次いで、予め規定されたしきい周波数よりも高い周波数を有するPPG信号の部分又は成分を、この高周波成分に較正係数を乗じることなどによって変更し、又は強化する。次いで、カフ圧力及び変更されたPPG信号を使用して血圧信号を計算する。次いで、血圧輪郭曲線を作成することができ、この曲線を使用してさまざまなパラメータを計算することができる。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、その内容の全体が参照によって本明細書に組み込まれる、2009年10月29日に出願した米国特許仮出願第61/256,081号及び米国特許仮出願第61/256,110号の優先権を主張するものである。
【0002】
本発明は一般に血圧を測定する方法に関し、より具体的には、血圧信号が強化される(enhanced)連続非侵襲動脈圧(continuous non−invasive arterial pressure)(CNAP)測定に関する。
【背景技術】
【0003】
脈波輪郭分析(pulse contour analysis)(PCA)は、血圧パルス、特に脈波の輪郭からパラメータを計算するプロセスである。PCAは、血圧(BP)を測定することから始まる。
【0004】
血圧はいくつかの方法で測定することができる。1つの実例として、標準非侵襲血圧計(standard non−invasive sphygmomanometer)(NBP)を上腕又は手首に取り付けることができる。NBPは動脈に圧力をかけ、それによって動脈は収縮し、血流を制限する。圧力を解放すると動脈内の血流は元に戻り、収縮期血圧及び拡張期血圧を測定することができる。NBPはBPを間欠的に測定するものであって、BPを連続的には測定せず、そのため、NBPをPCAに対して使用することはできない。
【0005】
血圧を測定する他のデバイスは、赤外光源と、パルス・オキシメトリ(pulse oximetry)からも知られているフォトプレスチモグラフィ(photo−plethysmographic)(PPG)信号を測定する光検出器とを有する手指カフ(finger cuff)である。このPPG信号は制御システムへ送られ、制御システムは、手指カフ内のカウンター圧力(counter pressure)を生成する。PPG信号が一定に保たれているときには、このカウンター圧力が動脈内の圧力に等しいことがよく知られている。したがって、動脈内圧力の間接的な等価物であるカウンター圧力が測定される。この方法は「血管アンローディング法(Vascular Unloading Technique)」として知られており、この連続圧力信号はPCAに対して使用することができる。
【0006】
例えば動脈内カテーテルなどの侵襲性デバイスを使用して血圧を測定することもできる。動脈内変換器は、比較的に高周波数の発信(最高200Hz)を有し、したがってPCAに対して使用することができる。
【0007】
脈波の輪郭から計算することができるパラメータのいくつかの実例には、一回拍出量(SV)、心拍出量(CO)、一回拍出量変動(SVV)、脈圧変動(PPV)、全末梢血管抵抗(TPR)などがある。さらに、ヒトの血管の特性、例えば動脈壁硬化(arterial stiffness)に対する洞察を与える他の測定に対して、PCAを使用することもできる。したがって、測定される血圧信号はできるだけ正確であることが望ましい。
【0008】
侵襲性デバイスには、患者が過度の不安及び痛みを感じるという欠点があり、非侵襲デバイスからの信号は、信号の忠実度(fidelity)又は正確さに問題がある。
【発明の概要】
【課題を解決するための手段】
【0009】
血圧信号の忠実度を強化するシステム及び方法が開示される。一実施例では、血圧輪郭曲線を決定する方法が、ヒトの手指の動脈の上にフォトプレスチモグラフィ(PPG)システムを配置することを含み、このPPGシステムが、動脈の体積に基づくPPG信号を生成し、少なくとも1つの光源及び少なくとも1つの光検出器を含み、この方法がさらに、予め規定されたしきい周波数(threshold frequency)よりも高い周波数を有するPPG信号の成分を変更すること、並びに変更されたPPG信号を使用して血圧信号を計算することを含む。
【0010】
他の実施例では、血圧輪郭曲線を決定するコンピューティング・デバイスが開示される。このコンピューティング・デバイスは、ヒトの手指の動脈の上に配置されるように適合された圧力カフであり、少なくとも1つの光源及び少なくとも1つの光検出器を有するPPGシステムを含む圧力カフと、圧力センサと、カフ内の圧力を制御するコントローラとを備える。このPPGシステムは、動脈の体積に基づくPPG信号を生成し、PPG信号を使用して圧力信号が計算され、カフ及び手指にこの圧力信号が加えられる。このコンピューティング・デバイスは、予め規定されたしきい周波数よりも高い周波数を有するPPG信号の成分を変更し、カフ圧力及び変更されたPPG信号を使用して血圧信号を計算する。
【0011】
他の実施例では、連続非侵襲動脈圧デバイスの望んでいない(undesired)信号内容を除去する方法が開示される。この方法は、フォトプレスチモグラフィ(PPG)システムを有するカフをヒトの手指の動脈の上に配置することを含み、このPPGシステムが、前記動脈の体積に基づくPPG信号を生成し、この方法はさらに、このPPG信号から、PPG信号の望んでいない部分を除去すること、及びPPG信号の残留部分(remaining portion)からPPG信号を再構成することを含む。
【0012】
本明細書では、以下の図面を参照して本発明の例示的な実施例を説明する。
【図面の簡単な説明】
【0013】
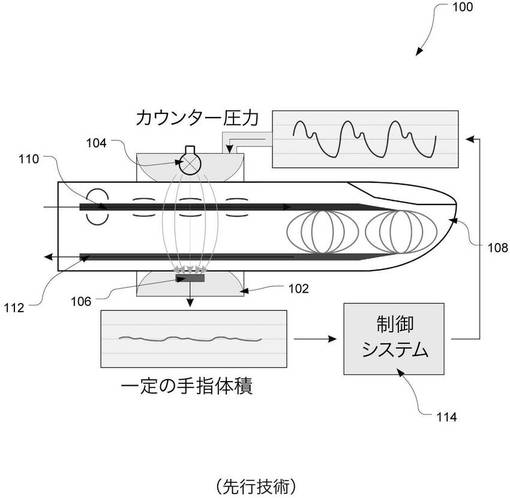
【図1】カフ圧力を制御するフォトプレスチモグラフィ(PPG)システムを使用して血圧を測定する先行技術の血管アンローディング法(VUT)制御システムを示す図である。
【図2】異なる一定のカフ圧力におけるPPG信号v(t)間の伝達関数を説明する図である。
【図3】探索(開ループ)モード及び測定(閉ループ)モードにおける残留PPG信号v(t)の例示的なパルスを示す図である。
【図4】異なる制御利得及び概念を有する異なる周波数範囲を使用したブロック図である。
【図5】較正方法のブロック図である。
【図6】動脈の血管収縮によって生じた残留PPG信号v(t)の変化を示す図である。
【図7】1つの時間変化入力信号及びいくつかの入力パラメータを有する先行技術の脈波輪郭分析(PCA)を説明する図である。
【図8】新規のPCA法及びPCAデバイスのブロック図である。
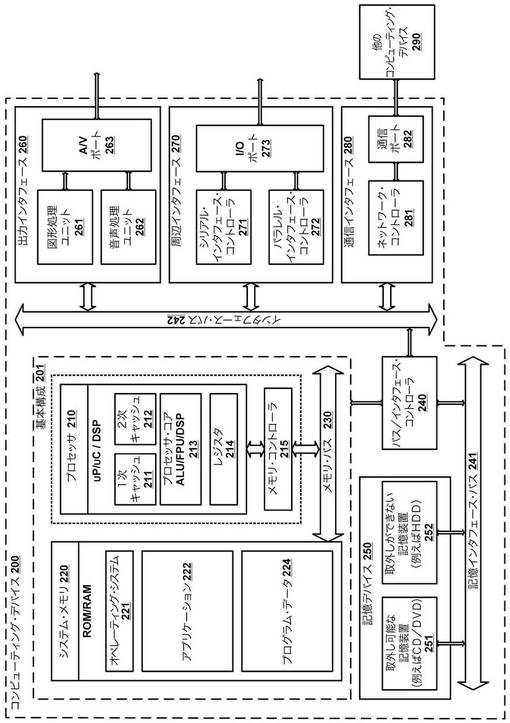
【図9】本出願のシステム及び方法と一緒に使用することができる例示的なコンピューティング・デバイスを示す図である。
【発明を実施するための形態】
【0014】
血圧(BP)信号を測定し、強化するシステム及び方法を説明する。この変更されたより正確な信号を使用して、例えば一回拍出量(SV)、心拍出量(CO)、全末梢血管抵抗(TPR)、動脈壁硬化など、患者のさまざまなパラメータをより正確に計算することができる。この方法は、知られている「血管アンローディング法」(VUT)のフォトプレスチモグラフィ(PPG)信号のAC成分を抽出する。測定された圧力信号と組み合わせて、この信号は、脈波輪郭分析(PCA)の第2の入力として使用される。
【0015】
図1は、一般的なVUTシステム100及びその制御原理を示す。VUTシステム100はPPG信号を得る目的に使用され、次いでこの得られたPPG信号を使用して、連続動脈圧と等価のカフ圧力を制御することができる。VUTシステム100は、手指カフ102内に位置し、1つ又は複数の光源104及び1つ又は複数の光検出器106を有する「フォトプレスチモグラフィ」(PPG)システムを含む。PPG信号は、カフ102内の圧力を生成する制御システム114へ送られる。
【0016】
操作する際には、ヒトの手指108を手指カフ102に入れる。手指カフ102は、手指108の動脈110内の血液量を測定する。収縮期に手指108内の血液量が増すと、コントローラ114は、カフの圧力によって過剰な血液量がしぼり出されるまで、手指カフ102の圧力pcuff(t)を増大させる。一方、拡張期には手指内の血液量が減り、したがってコントローラ114はpcuff(t)を低下させて、動脈内の全体の血液量が一定に維持されるようにする。時間が経過しても血液量、したがってv(t)は一定に維持されるため、カフ圧力pcuff(t)と動脈内圧力part(t)の圧力差はゼロである。したがって、part(t)はカフ圧力pcuff(t)に等しく、カフ圧力pcuff(t)は例えばマノメータ(圧力測定器)によって容易に測定することができる。このようにして、動脈内圧力part(t)は間接的に測定され、測定領域(例えば手指)の動脈の血液量の変化を反映したPPG信号v(t)が得られる。PPG信号が一定に保たれているときにはカウンター圧力が動脈の血液量の変化を妨げ、動脈の直径も一定である。したがって、測定の間、動脈流入(arterial influx)は保証され、指先からの静脈還流はわずかに低減する。
【0017】
いくつかの理由から、この間接測定が正確でないことがある。例えば、カフ内の圧力が動脈内の圧力に瞬時に追従しないことがあるため、v(t)は正確には一定ではない。したがって、カフ圧力が動脈内の圧力に追従しているとき、v(t)は、交流電流(AC)に似た成分(vAC(t)と呼ぶ)を有する。圧力信号を生成しているとき、VUT法はその弁システムに依存している。一般に、それらの弁システムの上カットオフ周波数は15〜40Hzに制限されている。したがって、カフ内のカウンター圧力pcuff(t)はしばしば、vAC(t)を生成する信号源よりもゆっくりである。カフから組織への圧力結合、ポンプから弁システムへの給気及び弁システムからカフへの給気などのような追加の因子も制御システムを制限する。これらの因子はVUTを制限し、残留vAC(t)につながる。
【0018】
さらに、脈圧は制御ループ利得(1つ又は複数)に依存し、制御ループ利得は、PPG信号の最大振幅vmax(t)から「PhysioCal」基準に従って計算されるか、又は経験的に選択される。これらの利得は、vAC(t)をゼロにするためには必要であると考えられる無限大にはなりえない。vmax(t)から計算されるとき、このコントローラ利得は最適にはならないことがある。
【0019】
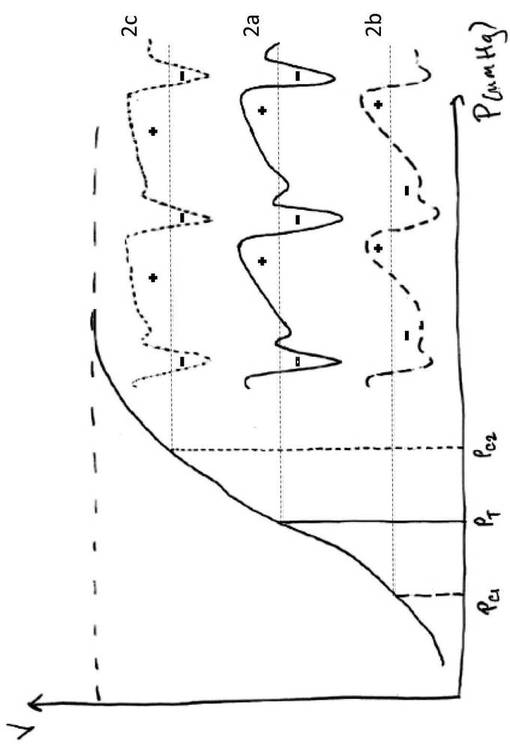
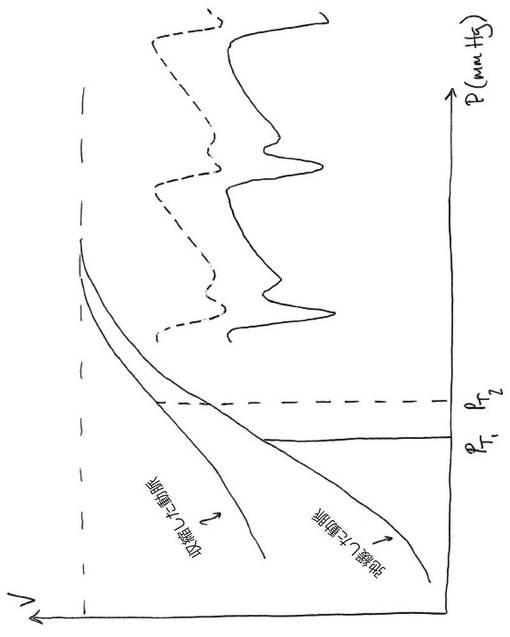
pcuff(t)、part(t)及びvAC(t)間の根底をなす機構を、一定のカフ圧力(pC1、pT、pC2)について図2に示す(それぞれ線2b、2a、2c)。一般的なS字形のp−v伝達曲線(transmission curve)は、pcuff(t)によって異なるPPG信号v(t)を生成する。vAC(t)の振幅がpcuffに依存し、pcuff=平均BPのときに最も高いことはよく知られている。pcuffが異なればv(t)の形状も異なる。
【0020】
PPG信号の逆特性(inverted characteristic)に留意されたい。光源104からの光は血液によって吸収される。手指の内部にある血液が多いほど(例えば収縮期)、手指を透過し、光検出器106によって検出される光は低減する。
【0021】
真の平均BPは、(アナログ信号及び時系列に関して)以下のように計算される。
【0022】
【数1】
上式で、Tは、拍動の脈間隔[秒]、Nは、拍動の標本piの数である。
【0023】
実際の測定を開始する前に平均BPを検出するVUTデバイスの探索モードでは、一定のpcuffを使用する。PPG振幅vAC(t)が最大の場合のpcuffは平均BPを表す。この出発pcuffはいわゆる出発設定点pT0である。
【0024】
測定モードの間、制御システムのループは閉じている。このことは、pcuffが、v(t)に関して及びコントローラ利得gに応じて交番していることを意味する。VUTの原理に従って、vAC(t)の振幅は最小値まで低下している。vAC(t)はゼロであることが理想的だが、利得は実数値であり、無限大ではないため、及び弁のカットオフ周波数のために、これは不可能である。
【0025】
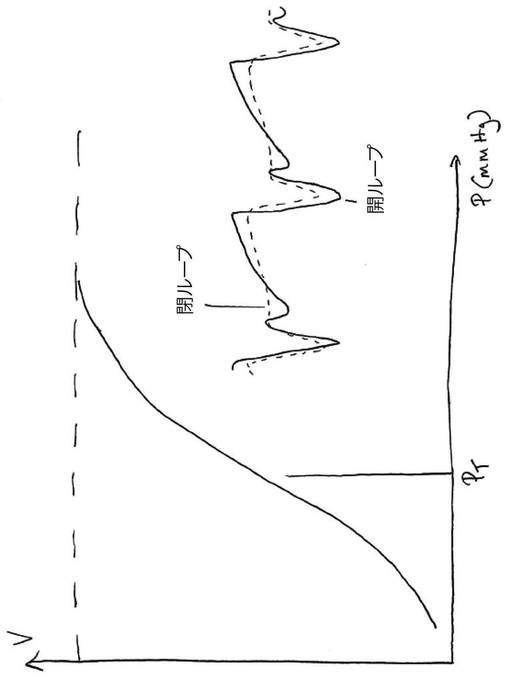
図3は、設定点pTを中心に交番している、v(t)によって制御された機構pcuffを示す。制御条件は、v(t)、したがって手指内の血液量を一定に保つことである。v(t)を、vAC(t)の最小振幅に維持すればよい。制御システムの逆特性に留意されたい。PPG信号の逆特性のため、v(t)の増大はpcuffを低下させ、v(t)の低減はpcuffを増大させる。
【0026】
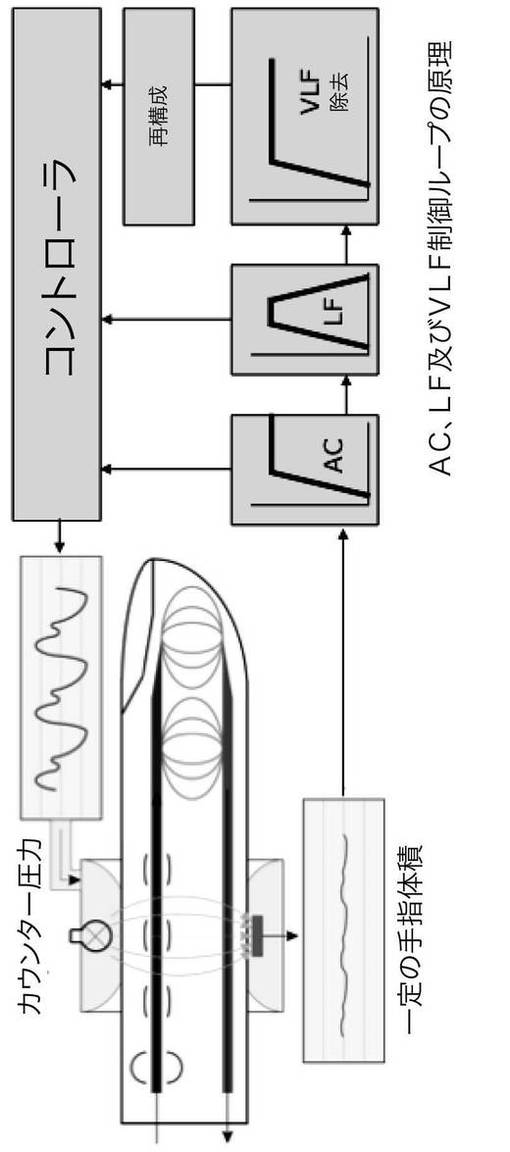
いくつかの実施例では、2つ以上の制御ループを有すると有利である。図4は、そのような制御システムのブロック図を示す。この一般的な実施例では、v(t)を、異なる複数の周波数範囲に分割する。fVLF及びfLFにカットオフ周波数を有するフィルタを用いて、拍動性vAC(t)、低周波vLF(t)及び超低周波vVLF(t)を得る。これらの3つの周波数範囲が異なる利得gAC、gLF及びgVLFを有するとさらに有利である。これは、v(t)に対する最適な利得の使用を可能にする。
【0027】
拍動性の残留PPG信号vAC(t)及びv(t)の他の周波数帯、並びに制御システムの状態変数(例えば利得、カットオフ周波数など)を、測定されたpcuff(t)をp++(t)に強化する目的に使用することができる多変量伝達関数Tに対して使用することができる。式(2)は、n個の制御ループを使用するときのより一般的な式である。
p++(t)=p(t)+T[v1(t),v2(t)...vn(t);g1,g2...gn;fc1,fc2...fcn] (2)
0.1Hzよりも低い周波数範囲はp++(t)に寄与しないことが分かっている。vAC(t)及びvLF(t)だけが有意味な信号(meaningful signal)に寄与するため、図4に記載された実施例に対する式(2)は以下のように単純化される。
p++(t)=p(t)+T[vAC(t),vLF(t);gAC,gLF;fLF,fVLF] (3)
正しい設定点が使用されているときには線形関数を使用することができる。図2〜4から分かるように、正しい設定点において、pTは傾きが最大の点であり、したがって拍動性vAC(t)、低周波vLF(t)及び超低周波vVLF(t)は最大に達する。線形補間を以下のように近似することができる。
p++(t)=p(t)+T[vAC(t)・gAC vLF(t)・gLF] (4)
上式で、Tは、線形補間後の残留伝達関数を示す。1つの実例では、Tを、線形化された異なるv(t)×利得倍数間の異なるスケーリング・ファクタ(scaling factor)のベクトルとすることができる。
【0028】
生理的理由から、異なる部位(例えば手指、上腕、手首、脚など)で測定したとき、脈の波形は異なる。したがって、手指の動脈110で測定した血圧は人体の他の領域で測定した血圧とは異なるため、手指動脈圧デバイスは標準デバイスに比べて正確さに欠ける。
【0029】
VUT圧力信号pcuff(t)を強化する1つの方法、したがってVUT圧力信号pcuff(t)の正確さを高める1つの方法は、手指で測定された信号vを、標準上腕血圧計(NBP)に対して較正する方法である。これを実行する1つの理由は、上腕は心臓の高さにほぼ近いが、手指はどこにでも置くことができるため、手指の動脈で測定したBPには、上腕に比べて生理的及び静水学的な固有差があることである。さらに、BPの脈圧(PP)は制御ループ利得(1つ又は複数)に依存し、これらの利得は、制御システムに由来するパラメータであって、生理的パラメータではない。この利得が、vAC(t)の最大振幅から「physiocal」基準に従って決定されるとき、この振幅は、実際の血管緊張(vascular tone)(血管収縮又は血管拡張)に依存する。これはBPに関する情報を持たない。この利得(1つ又は複数)が、システムが共振周波数で振動し始めるまで利得を増大させることによって経験的に選択されるときにも、これらの利得(1つ又は複数)は血管緊張及びシステム条件に依存する。この場合も、これはBPに関する情報を持たない。
【0030】
vAC(t)の最大振幅は、探索モードにおける一定のカフ圧力が平均BPに等しいことを示しているに過ぎない。vAC(t)の最大振幅は実際の血管緊張(血管収縮又は血管拡張)に依存し、したがって測定対象患者の自律神経系の状態に依存するため、この値自体は、「住居の番地表示(house number)」のようなものである。
【0031】
較正方法は、直線に沿って信号を変換することを含む。
p++(t)=k×pcuff(t)+d (5)
上式で、k及びdは、NBP値から以下のように計算することができる。
【0032】
【数2】
上式で、SBP及びDBPは、NBP較正デバイス(例えば上腕血圧カフ)によって測定した収縮期及び拡張期の値であり、sBP及びdBPは、較正されていない手指カフによって測定した収縮期及び拡張期の値である。
【0033】
傾きkは、BPパルスをスケーリング(scaling)しているだけでなく、低血圧及び高血圧エピソード(episode)をもスケーリングしているため、この方法は正確さに欠ける。この改良されたVUTシステムによって平均BPは正しく検出されるため、このBPトレンドは人為的な増幅を必要としない。高いk値はBPトレンドを過大評価する。例えば、k=2のとき、40mmHgのBPの低下は80mmHgとして表示されることになる。このような方法を用いると負の値さえも表示されうる。さらに、この方法は、BPの自然な調律、例えば0.1Hzのトラウベ−ヘーリング−マイヤー波を増幅し、BPの自然な調律を、非常に非生理的な調律であるかのように見せる。
【0034】
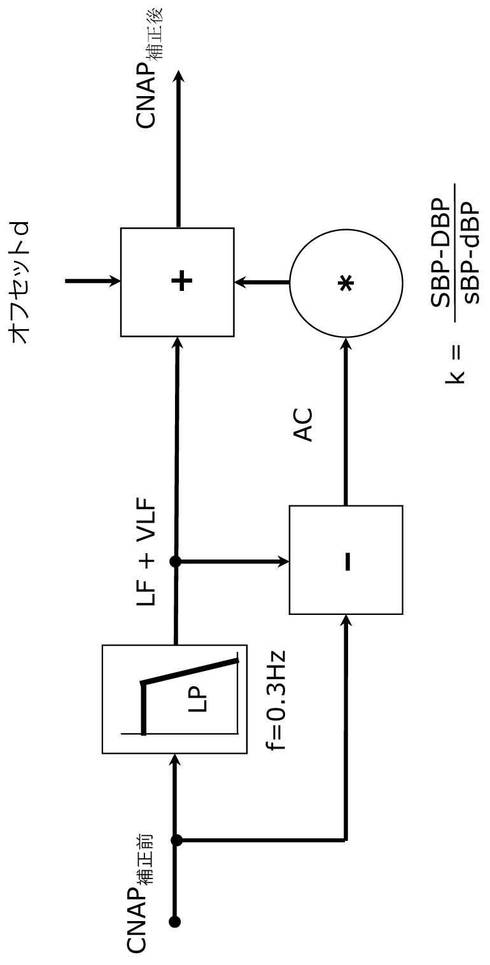
図5は、PPGシステムによって測定される信号の正確さをさらに向上させる方法を示す。この方法は、あるしきい値よりも高い周波数内容、例えば0.3Hzよりも高い周波数内容を有する信号の成分に、傾きkを乗じることだけを含む。このカットオフ周波数よりも低い信号成分は増幅しない。さらにオフセットdを加算する。したがって増幅式は以下のようになる。
p++(t)=k×pAC(t)+pLF(t)+d (8)
上式で、pAC(t)は、しきい周波数よりも大きな周波数を有する測定された圧力の成分であり、pLF(t)は、しきい周波数よりも低い周波数を有する測定された圧力の成分である。
【0035】
脈波周波数内容は本質的に、実際の脈拍数又は脈周波数(pulse frequency)よりも高い。60拍/分の正常な脈拍数では脈周波数が1Hzであり、ヒトではこの周波数が0.5Hz(30拍/分)まで下がる。
【0036】
(例えば手指での波形から上腕での波形へ)脈の波形を伝達するために伝達関数を使用するとき、この伝達関数は、約0.3Hzである最も低い可能な拍動周波数におけるその周波数範囲から始まる。それよりも低い周波数では伝達関数は一定になりうる。その伝達関数が脈周波数に依存する場合にはさらに有利であろう。これは、秒の代わりに心拍動に対して正規化することによって達成することができる。
pbrach(t)=Tnorm(p++(t))=
pbrach(t)=Tnorm(k×pAC(t)+pLF+d)=
pbrach(t)=pLF+d+Tnorm(k×pAC(t)) (9)
【0037】
式(9)から分かるように、変換しなければならないのは脈周波数内容pAC(t)だけである。これは、それよりも低い周波数に対してはTnormが一定である(例えば1)ためである。このアルゴリズムをPCA法の一部とすることができ、このアルゴリズムは、本発明のデバイス内で計算することができる。
【0038】
VUT信号を検出し強化する、知られている方法の他の問題は、根底をなすPPGシステムが、血管収縮又は血管拡張に起因する血液量の変化(血管運動による変化)を検出することができないことである。このような変化は例えば薬物によって引き起こされることがある。言い換えると、PPGシステムは、血管活動に起因するv(t)の変化と実際の血圧の変化とを区別することができない。したがって、BP波形をさらに強化するため、アルゴリズムをして、血管運動による変化に起因する血管(例えば手指の動脈)の変化を検出してもよい。このアルゴリズムは、血管運動による活動が活発なBP周波数帯、0.02Hzよりも低い超低周波(VLF)帯を強化する。このVLF帯は、トラウベ−ヘーリング−マイヤー波(0.1Hz)及び呼吸周波数(約0.2Hz)よりも低い。トラウベ−ヘーリング−マイヤー波と呼吸周波数はともにいわゆるLFループ内で処理されるため、本明細書では、これらをともにLF帯と呼ぶことに留意されたい。
【0039】
VLF帯は、生理的な又は薬物誘発性の血管収縮又は血管拡張に起因する血管運動による変化によって妨害される。図6は、新たなS字形の伝達関数を用いて示した血管収縮に起因するv(t)の一般的な変化を示す。pcuffは設定点pT1のままだが、設定点pT2の方が正しいであろう。振幅は小さくなるが、血管収縮はさらに、より著しい波形の変化を生成する。VLF帯を再構成するのにこの振舞いが使用される。
【0040】
これらの血管活動がBPの生理的変化を引き起こすことがある。BP信号は、VLF帯の除去及び再構成によって強化される。このアルゴリズムは、探索モードにおいて出発設定点pT0を見つけ、少なくとも1つの制御ループに対する少なくとも1つの利得係数を決定した後に制御ループが閉じられたときのその機能から始まる。pT0は実際の平均BPに等しい。
【0041】
既に説明したとおり、制御システムの利得は無限大にはなりえず、したがってvAC(t)はゼロではない。したがって、厳密にはpcuffはpartに等しくない。vAC(t)が負の場合(収縮期のpart)、pcuffはpartに追従している(pcuff<part)。vAC(t)がその正の(拡張期)半波にあるときには、pcuffはpartに先行している(pcuff>part)。
【0042】
利得(1つ又は複数)がゼロに設定された例を考える。図2aに示されているこの状況では、pT0及びpcuffが平均BPにあり、vAC(t)はその最大振幅を有する。負の曲線の下の面積は、拍動の正の半波の下の面積に等しい。したがって、平均BPを指示するpcuffに比べてpartの方が大きい頻度とpartの方が小さい頻度とが同じである。このことは、設定点pT0が正しいことを示している。したがって、この現象を設定点追従に使用することができる。
【0043】
交番する信号の負の半波と正の半波が等しいとき、以下の式は真である。
【0044】
【数3】
【0045】
1回の拍動全体にわたるこのvAC(t)のこの積分がゼロでないとき、波形は変化している。図2はこの現象を記述している。2aは、vAC(t)の正の半波と負の半波が等しいことを示しており、2bは、低い設定点及びより大きな負の半波を有する信号を示しており、2cは、高い設定点及びより大きな正の半波を有する信号を示している。
【0046】
式(10)は、設定点の変化を指示しているn番目の拍動に対する制御偏差Pnを計算する。
【0047】
【数4】
上式で、Pn=0→設定点は正しい
Pn<0→設定点を低く
Pn>0→設定点を高く
【0048】
利得(1つ又は複数)がゼロでなく、pcuffがpartに先行/追従し、vAC(t)が最小化されているときも、この現象は真である。血管運動による変化によってs字形のp−v伝達関数が変化したときも、この現象は真である。
【0049】
次に、比例制御偏差Pを使用してVLF帯を再構成する。そのために、比例制御偏差Pはさらに積分部分Iを必要とし、n番目の拍動に対する新たな設定点は以下のとおりである。
【0050】
【数5】
【0051】
制御ループ利得gI及びgPは、拍動性部分に対する利得gAC及び生理的な調律に従って決定される。
【0052】
この追従(又は再構成)アルゴリズムは、高域フィルタ(例えばディジタル・フィルタ)を用いたVLF帯の除去を可能にする。(例えば)0.02Hzよりも低い全ての周波数内容を除去し、LF帯及び拍動性のAC成分だけを使用する。vAC(t)は、測定されたPPG信号v(t)からvVLF(t)を差し引くことによって計算するのであって、信号vDCのDC成分を差し引くことによって計算するのではないことに留意されたい。
【0053】
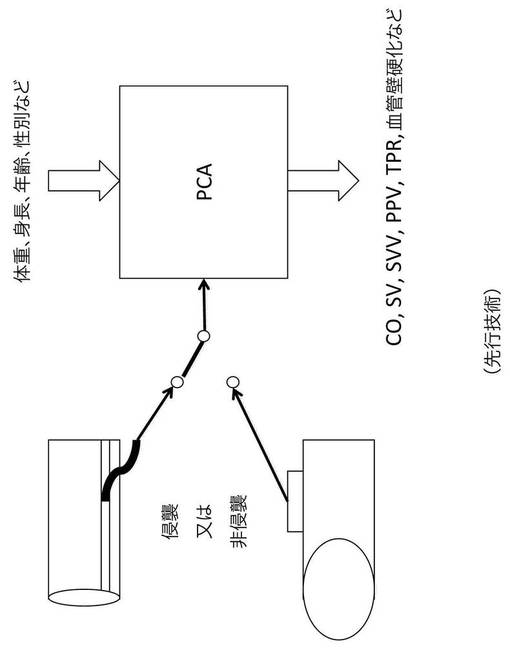
図7は、単一の時間変化入力信号と、動脈内カテーテル又は非侵襲デバイスと、いくつかの入力パラメータとを有する先行技術のPCAを示す。PCAに対してVUTを使用するとき、pcuffはpartに等しくない。これは、残留PPG信号vAC(t)によって指示される。さらに、制御システムの状態変数は血管運動による変化を指示する。この残留情報を使用してPCAアルゴリズムを強化することもできる。
【0054】
vAC(t)のような追加の入力信号(1つ又は複数)及び(平均BPに等しい)設定点pTを決定するための信号を含むように拡張しなければならないため、標準PCA法を使用することはできない。血管運動による変化のため設定値を補正しなければならないかどうかを指示するPnが有意味な信号であることもある。血管特性を決定するために他の状態変数を使用することもできる。
【0055】
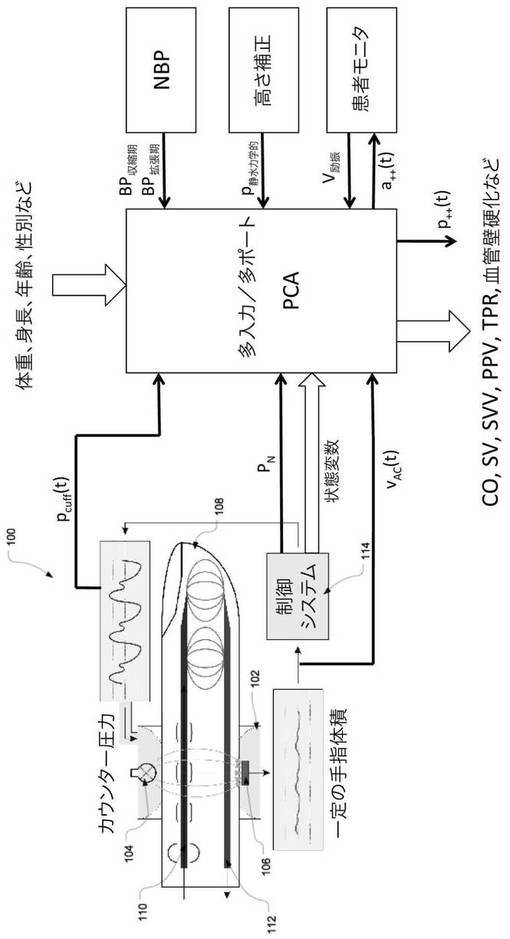
図8は、PCA法及びPCAデバイスのブロック図を示す。VUT部分は、圧力pcuff(t)、vAC(t)及びPn、並びに状態変数を提供する。
【0056】
この方法はさらに、強化された圧力信号p++を計算する方法を含むことができる。この方法はさらに、CO、SV、SVV、PPV、動脈壁硬化などのようなPCAパラメータを計算し、これらのパラメータ及びp++を提供し、表示する。この方法はさらに、標準NBPから(収縮期BP、平均BP及び拡張期BPのような)間欠的なBPの読みを得ることができる。この方法はさらに、IBP入力を有する他のデバイスのスケーリング・ファクタを知るために、そのようなデバイスからの励振電圧を含むことができる。
【0057】
先行技術のPCA法が圧力入力又はPPG入力を1つだけ有するのに対して複数の入力信号を有するため、このPCA法は、多ポート・ネットワーク又は多ポート・アルゴリズムである。
【0058】
このPCA法はこれらの複数の入力を処理する。この方法の一実施例は、最初にp++を計算し、次いでそのp++を標準PCAに対して使用する逐次モードである。この方法を使用すると、血管運動による変化に関する情報が失われることがある。したがって、好ましい実施例は、線形及び非線形の多ポート・アルゴリズムを使用する。さらに、これらのアルゴリズムは、入力時系列から信号マーカ(signal marker)を計算することができ、この信号マーカは例えば、曲線の下又は曲線の一部分の下の面積、信号のデューティ・サイクル、比(例えば(平均BP−拡張期BP)/(収縮期BP−拡張期BP))、拡張期減衰(diastolic decay)、これらの信号及び対数信号統計的モーメント(logarithmic signal statistical moment)の線形回帰などである。これらのマーカを、(身長、体重、年齢、性別などのような)人体計測患者情報(anthropometric patient information)並びにVUT制御システムによって得られた情報及びVUT制御システムの状態変数とともに使用して、PCAパラメータを計算することができる。この計算は、多変量多項式から実施することができる。このような多変量式の重みは、生理的なアプリオリ情報から決定することができ、又は訓練セットを使用した機械学習法によって訓練することができる。
【0059】
血圧信号を強化するこの方法とともに、高さ補正システムを使用することもできる。このような高さ補正システムは、血液の密度に一致した密度を有する流体で満された管を含むことができる。管の一端を心臓の高さに配置し、他端を手指カフ上に配置する。管の心臓側端に、流体が漏れることを防ぐ自由浮動膜を取り付けることができる。手指側端に配置され、流体に直接に接続された圧力センサが、静水力学的な圧力差を測定する。この高さ補正システムの圧力センサは、センサ位置において周波数信号又はディジタル信号が生成され、その信号が全体制御システムに提示されるように構築することができる。
【0060】
強化された又は変更された前述の信号を他のデバイス、例えば市販の患者モニタに提供することは望ましいであろう。これらは全て標準IBP圧力用の入力を有するからである。したがって、この非侵襲信号をスクリーン上に表示することができ、他の監視デバイスに配布することができる。大部分の患者モニタは、動脈内血圧(IBP)を測定するための圧力変換器用のインタフェースを有する。このIBPインタフェースは、血圧信号を電圧にスケーリングする目的に使用される励振電圧を提供する。この強化された信号をさらに、図9に関して説明するものなどの他のデバイス又はコンピュータに、ディジタル方式で配布することができる。同じことが、SV、CO、SVV、PPV、TPR、動脈壁硬化などのような計算された全ての値、並びに強化された収縮期BP値、拡張期BP値及び平均BP値についても言える。
【0061】
スケーリング範囲及びスケーリング・ファクタを決定するため、患者モニタは励振電圧を提供する。最低及び最高圧力は仕様書から知られている。この励振電圧はこの方法への入力の役割を果たすことができ、p++(t)又はpbrach(t)を、動脈内変換器の出力電圧を模倣する電圧a++(t)に変換することができる。変換され、強化された信号は別のデバイスへ送られる。a++(t)は、このデバイスのマイクロプロセッサ/コンピュータのアナログ出力によって、外部DACによって、又はPWM出力及びそれに続くRCフィルタを使用することによって供給することができる。
【0062】
図9は、本出願のシステム及び方法に関連付けることができる例示的なコンピューティング・デバイス200を示すブロック図である。コンピューティング・デバイス200は、信号の変更、値の計算及びアルゴリズムの実行を含む本出願の方法を実行することができる。
【0063】
ごく基本的な構成201では、コンピューティング・デバイス200が一般に、1つ又は複数のプロセッサ210及びシステム・メモリ220を含む。プロセッサ210とシステム・メモリ220の間の通信には、メモリ・バス230を使用することができる。
【0064】
所望の構成に応じて、プロセッサ210は、限定はされないがマイクロプロセッサ(μP)、マイクロコントローラ(μC)、ディジタル信号プロセッサ(DSP)又はこれらの任意の組合せを含む、任意のタイプのプロセッサとすることができる。プロセッサ210は、1次キャッシュ211及び2次キャッシュ212、プロセッサ・コア213、レジスタ214など、もう1レベルのキャッシングを含むことができる。プロセッサ・コア213は、算術論理ユニット(ALU)、浮動小数点ユニット(FPU)、ディジタル信号処理コア(DSPコア)又はこれらの任意の組合せを含むことができる。プロセッサ210と一緒にメモリ・コントローラ215を使用することもでき、又は、実施態様によっては、メモリ・コントローラ215をプロセッサ210の内部部品とすることもできる。
【0065】
所望の構成に応じて、システム・メモリ220は、限定はされないが揮発性メモリ(RAMなど)、不揮発性メモリ(ROM、フラッシュ・メモリなど)又はこれらの任意の組合せを含む、任意のタイプのシステム・メモリとすることができる。システム・メモリ220は一般に、オペレーティング・システム221、1つ又は複数のアプリケーション222及びプログラム・データ224を含む。例えば、PPGシステムからある入力を受け取り、それらの入力から判断を下すように、アプリケーション222を設計することができる。例えば、PPGシステム、NBP及び潜在的な他のシステムから入力を受け取るように、アプリケーションを設計することができる。出力として、アプリケーション222は、本明細書において既に説明した方法のうちの任意の方法を実行し、より忠実度が高いBP信号を提供することができる。
【0066】
コンピューティング・デバイス200は、追加の特徴又は機能、及び基本構成201間の通信を容易にする追加のインタフェースを有することができる。例えば、記憶インタフェース・バス241を介した基本構成201と1つ又は複数のデータ記憶デバイス250との間の通信を容易にするために、バス/インタフェース・コントローラ240を使用することができる。データ記憶デバイス250は、取外し可能な記憶デバイス251、取外しができない記憶デバイス252又はこれらの組合せとすることができる。少し例を挙げれば、取外し可能な記憶デバイス及び取外しができない記憶デバイスの実例には、フレキシブル・ディスク・ドライブ、ハードディスク・ドライブ(HDD)などの磁気ディスク・デバイス、コンパクト・ディスク(CD)ドライブ、ディジタル・バーサタイル・ディスク(DVD)ドライブなどの光ディスク・ドライブ、ソリッド・ステート・ドライブ(SSD)及びテープ・ドライブなどがある。例示的なコンピュータ記憶媒体には、コンピュータ可読命令、データ構造、プログラム・モジュール又は他のデータなどの情報を記憶する任意の方法又は技術において実現された、揮発性及び不揮発性の取外し可能な媒体及び取外しができない媒体が含まれる。
【0067】
システム・メモリ220、取外し可能な記憶装置251及び取外しができない記憶装置252は全てコンピュータ記憶媒体の実例である。コンピュータ記憶媒体には、限定はされないが、RAM、ROM、EEPROM、フラッシュ・メモリ若しくは他のメモリ技術、CD−ROM、ディジタル・バーサタイル・ディスク(DVD)若しくは他の光学記憶装置、磁気カセット、磁気テープ、磁気ディスク記憶装置若しくは他の磁気記憶デバイス、又は所望の情報を記憶する目的に使用することができ、コンピューティング・デバイス200がアクセスすることができる他の媒体が含まれる。このようなコンピュータ記憶媒体はデバイス200の一部とすることができる。
【0068】
バス/インタフェース・コントローラ240を介したさまざまなインタフェース装置から基本構成201への通信を容易にするため、コンピューティング・デバイス200はさらにインタフェース・バス242を含むことができる。例示的な出力インタフェース260は図形処理ユニット261及び音声処理ユニット262を含み、これらの処理ユニットは、1つ又は複数のA/Vポート263を介してディスプレイ、スピーカなどのさまざまな外部デバイスに情報を伝達するように構成することができる。例示的な周辺インタフェース260は、シリアル・インタフェース・コントローラ271又はパラレル・インタフェース・コントローラ272を含み、インタフェース・コントローラは、1つ又は複数のI/Oポート273を介して、入力デバイス(例えばキーボード、マウス、ペン、音声入力デバイス、タッチ入力デバイスなど)又は他の周辺デバイス(例えばプリンタ、スキャナなど)などの外部デバイスと通信するように構成することができる。例示的な通信インタフェース280はネットワーク・コントローラ281を含み、ネットワーク・コントローラ281は、1つ又は複数の通信ポート282を介した、ネットワーク通信を横切る、1つ又は複数の他のコンピューティング・デバイス290との通信を容易にするように構成することができる。この通信接続は通信媒体の1つの実例である。通信媒体は一般に、コンピュータ可読命令、データ構造若しくはプログラム・モジュールによって、又は搬送波若しくは他の輸送機構などの被変調データ信号中の他のデータによって具体化され、通信媒体は一般に任意の情報送達媒体を含む。「被変調データ信号」は、情報をその中にコード化するような方式で設定され又は変更されたその特性うちの1つ又は複数の特性を有する信号とすることができる。一例として、限定はされないが、通信媒体は、有線ネットワーク、直接有線接続などの有線媒体、及び音声、無線周波(RF)、赤外(IR)無線媒体などの無線媒体を含むことができる。本明細書で使用するとき、用語コンピュータ可読媒体は記憶媒体と通信媒体の両方を含むことができる。
【0069】
コンピューティング・デバイス200は、携帯電話、パーソナル・データ・アシスタント(PDA)、パーソナル・メディア・プレーヤ・デバイス、無線ウェブ閲覧デバイス、パーソナル・ヘッドセット・デバイス、特定用途向けデバイス又は上記の機能のうちの任意の機能を含むハイブリッド・デバイスなどの小フォーム・ファクタの可搬式(又は移動式)電子デバイスの一部として実現することができる。コンピューティング・デバイス200は、ラップトップ・コンピュータ構成と非ラップトップ・コンピュータ構成の両方を含むパーソナル・コンピュータとして実現することもできる。
【0070】
医師は、心臓の高さで得た血圧値に対して使用される。手指は、静水力学的に異なる高さに置くことができるため、手指と心臓の高さの間に延ばした水を満した管によって、これらの2つの部位間の差を補正することができる。したがって、手指センサ及び心臓の高さの静水力学的な差を除去するために、高さ補正システムを使用することができる。
【0071】
ある種の実施例及び用途に関して本発明を説明したが、当業者は、本発明の着想の趣旨に依然として含まれる変更、修正、改変等を認識する。そのような変更、修正、改変等は、以下の特許請求の範囲に記載された本発明の範囲に含まれることが意図されている。
【技術分野】
【0001】
本出願は、その内容の全体が参照によって本明細書に組み込まれる、2009年10月29日に出願した米国特許仮出願第61/256,081号及び米国特許仮出願第61/256,110号の優先権を主張するものである。
【0002】
本発明は一般に血圧を測定する方法に関し、より具体的には、血圧信号が強化される(enhanced)連続非侵襲動脈圧(continuous non−invasive arterial pressure)(CNAP)測定に関する。
【背景技術】
【0003】
脈波輪郭分析(pulse contour analysis)(PCA)は、血圧パルス、特に脈波の輪郭からパラメータを計算するプロセスである。PCAは、血圧(BP)を測定することから始まる。
【0004】
血圧はいくつかの方法で測定することができる。1つの実例として、標準非侵襲血圧計(standard non−invasive sphygmomanometer)(NBP)を上腕又は手首に取り付けることができる。NBPは動脈に圧力をかけ、それによって動脈は収縮し、血流を制限する。圧力を解放すると動脈内の血流は元に戻り、収縮期血圧及び拡張期血圧を測定することができる。NBPはBPを間欠的に測定するものであって、BPを連続的には測定せず、そのため、NBPをPCAに対して使用することはできない。
【0005】
血圧を測定する他のデバイスは、赤外光源と、パルス・オキシメトリ(pulse oximetry)からも知られているフォトプレスチモグラフィ(photo−plethysmographic)(PPG)信号を測定する光検出器とを有する手指カフ(finger cuff)である。このPPG信号は制御システムへ送られ、制御システムは、手指カフ内のカウンター圧力(counter pressure)を生成する。PPG信号が一定に保たれているときには、このカウンター圧力が動脈内の圧力に等しいことがよく知られている。したがって、動脈内圧力の間接的な等価物であるカウンター圧力が測定される。この方法は「血管アンローディング法(Vascular Unloading Technique)」として知られており、この連続圧力信号はPCAに対して使用することができる。
【0006】
例えば動脈内カテーテルなどの侵襲性デバイスを使用して血圧を測定することもできる。動脈内変換器は、比較的に高周波数の発信(最高200Hz)を有し、したがってPCAに対して使用することができる。
【0007】
脈波の輪郭から計算することができるパラメータのいくつかの実例には、一回拍出量(SV)、心拍出量(CO)、一回拍出量変動(SVV)、脈圧変動(PPV)、全末梢血管抵抗(TPR)などがある。さらに、ヒトの血管の特性、例えば動脈壁硬化(arterial stiffness)に対する洞察を与える他の測定に対して、PCAを使用することもできる。したがって、測定される血圧信号はできるだけ正確であることが望ましい。
【0008】
侵襲性デバイスには、患者が過度の不安及び痛みを感じるという欠点があり、非侵襲デバイスからの信号は、信号の忠実度(fidelity)又は正確さに問題がある。
【発明の概要】
【課題を解決するための手段】
【0009】
血圧信号の忠実度を強化するシステム及び方法が開示される。一実施例では、血圧輪郭曲線を決定する方法が、ヒトの手指の動脈の上にフォトプレスチモグラフィ(PPG)システムを配置することを含み、このPPGシステムが、動脈の体積に基づくPPG信号を生成し、少なくとも1つの光源及び少なくとも1つの光検出器を含み、この方法がさらに、予め規定されたしきい周波数(threshold frequency)よりも高い周波数を有するPPG信号の成分を変更すること、並びに変更されたPPG信号を使用して血圧信号を計算することを含む。
【0010】
他の実施例では、血圧輪郭曲線を決定するコンピューティング・デバイスが開示される。このコンピューティング・デバイスは、ヒトの手指の動脈の上に配置されるように適合された圧力カフであり、少なくとも1つの光源及び少なくとも1つの光検出器を有するPPGシステムを含む圧力カフと、圧力センサと、カフ内の圧力を制御するコントローラとを備える。このPPGシステムは、動脈の体積に基づくPPG信号を生成し、PPG信号を使用して圧力信号が計算され、カフ及び手指にこの圧力信号が加えられる。このコンピューティング・デバイスは、予め規定されたしきい周波数よりも高い周波数を有するPPG信号の成分を変更し、カフ圧力及び変更されたPPG信号を使用して血圧信号を計算する。
【0011】
他の実施例では、連続非侵襲動脈圧デバイスの望んでいない(undesired)信号内容を除去する方法が開示される。この方法は、フォトプレスチモグラフィ(PPG)システムを有するカフをヒトの手指の動脈の上に配置することを含み、このPPGシステムが、前記動脈の体積に基づくPPG信号を生成し、この方法はさらに、このPPG信号から、PPG信号の望んでいない部分を除去すること、及びPPG信号の残留部分(remaining portion)からPPG信号を再構成することを含む。
【0012】
本明細書では、以下の図面を参照して本発明の例示的な実施例を説明する。
【図面の簡単な説明】
【0013】
【図1】カフ圧力を制御するフォトプレスチモグラフィ(PPG)システムを使用して血圧を測定する先行技術の血管アンローディング法(VUT)制御システムを示す図である。
【図2】異なる一定のカフ圧力におけるPPG信号v(t)間の伝達関数を説明する図である。
【図3】探索(開ループ)モード及び測定(閉ループ)モードにおける残留PPG信号v(t)の例示的なパルスを示す図である。
【図4】異なる制御利得及び概念を有する異なる周波数範囲を使用したブロック図である。
【図5】較正方法のブロック図である。
【図6】動脈の血管収縮によって生じた残留PPG信号v(t)の変化を示す図である。
【図7】1つの時間変化入力信号及びいくつかの入力パラメータを有する先行技術の脈波輪郭分析(PCA)を説明する図である。
【図8】新規のPCA法及びPCAデバイスのブロック図である。
【図9】本出願のシステム及び方法と一緒に使用することができる例示的なコンピューティング・デバイスを示す図である。
【発明を実施するための形態】
【0014】
血圧(BP)信号を測定し、強化するシステム及び方法を説明する。この変更されたより正確な信号を使用して、例えば一回拍出量(SV)、心拍出量(CO)、全末梢血管抵抗(TPR)、動脈壁硬化など、患者のさまざまなパラメータをより正確に計算することができる。この方法は、知られている「血管アンローディング法」(VUT)のフォトプレスチモグラフィ(PPG)信号のAC成分を抽出する。測定された圧力信号と組み合わせて、この信号は、脈波輪郭分析(PCA)の第2の入力として使用される。
【0015】
図1は、一般的なVUTシステム100及びその制御原理を示す。VUTシステム100はPPG信号を得る目的に使用され、次いでこの得られたPPG信号を使用して、連続動脈圧と等価のカフ圧力を制御することができる。VUTシステム100は、手指カフ102内に位置し、1つ又は複数の光源104及び1つ又は複数の光検出器106を有する「フォトプレスチモグラフィ」(PPG)システムを含む。PPG信号は、カフ102内の圧力を生成する制御システム114へ送られる。
【0016】
操作する際には、ヒトの手指108を手指カフ102に入れる。手指カフ102は、手指108の動脈110内の血液量を測定する。収縮期に手指108内の血液量が増すと、コントローラ114は、カフの圧力によって過剰な血液量がしぼり出されるまで、手指カフ102の圧力pcuff(t)を増大させる。一方、拡張期には手指内の血液量が減り、したがってコントローラ114はpcuff(t)を低下させて、動脈内の全体の血液量が一定に維持されるようにする。時間が経過しても血液量、したがってv(t)は一定に維持されるため、カフ圧力pcuff(t)と動脈内圧力part(t)の圧力差はゼロである。したがって、part(t)はカフ圧力pcuff(t)に等しく、カフ圧力pcuff(t)は例えばマノメータ(圧力測定器)によって容易に測定することができる。このようにして、動脈内圧力part(t)は間接的に測定され、測定領域(例えば手指)の動脈の血液量の変化を反映したPPG信号v(t)が得られる。PPG信号が一定に保たれているときにはカウンター圧力が動脈の血液量の変化を妨げ、動脈の直径も一定である。したがって、測定の間、動脈流入(arterial influx)は保証され、指先からの静脈還流はわずかに低減する。
【0017】
いくつかの理由から、この間接測定が正確でないことがある。例えば、カフ内の圧力が動脈内の圧力に瞬時に追従しないことがあるため、v(t)は正確には一定ではない。したがって、カフ圧力が動脈内の圧力に追従しているとき、v(t)は、交流電流(AC)に似た成分(vAC(t)と呼ぶ)を有する。圧力信号を生成しているとき、VUT法はその弁システムに依存している。一般に、それらの弁システムの上カットオフ周波数は15〜40Hzに制限されている。したがって、カフ内のカウンター圧力pcuff(t)はしばしば、vAC(t)を生成する信号源よりもゆっくりである。カフから組織への圧力結合、ポンプから弁システムへの給気及び弁システムからカフへの給気などのような追加の因子も制御システムを制限する。これらの因子はVUTを制限し、残留vAC(t)につながる。
【0018】
さらに、脈圧は制御ループ利得(1つ又は複数)に依存し、制御ループ利得は、PPG信号の最大振幅vmax(t)から「PhysioCal」基準に従って計算されるか、又は経験的に選択される。これらの利得は、vAC(t)をゼロにするためには必要であると考えられる無限大にはなりえない。vmax(t)から計算されるとき、このコントローラ利得は最適にはならないことがある。
【0019】
pcuff(t)、part(t)及びvAC(t)間の根底をなす機構を、一定のカフ圧力(pC1、pT、pC2)について図2に示す(それぞれ線2b、2a、2c)。一般的なS字形のp−v伝達曲線(transmission curve)は、pcuff(t)によって異なるPPG信号v(t)を生成する。vAC(t)の振幅がpcuffに依存し、pcuff=平均BPのときに最も高いことはよく知られている。pcuffが異なればv(t)の形状も異なる。
【0020】
PPG信号の逆特性(inverted characteristic)に留意されたい。光源104からの光は血液によって吸収される。手指の内部にある血液が多いほど(例えば収縮期)、手指を透過し、光検出器106によって検出される光は低減する。
【0021】
真の平均BPは、(アナログ信号及び時系列に関して)以下のように計算される。
【0022】
【数1】
上式で、Tは、拍動の脈間隔[秒]、Nは、拍動の標本piの数である。
【0023】
実際の測定を開始する前に平均BPを検出するVUTデバイスの探索モードでは、一定のpcuffを使用する。PPG振幅vAC(t)が最大の場合のpcuffは平均BPを表す。この出発pcuffはいわゆる出発設定点pT0である。
【0024】
測定モードの間、制御システムのループは閉じている。このことは、pcuffが、v(t)に関して及びコントローラ利得gに応じて交番していることを意味する。VUTの原理に従って、vAC(t)の振幅は最小値まで低下している。vAC(t)はゼロであることが理想的だが、利得は実数値であり、無限大ではないため、及び弁のカットオフ周波数のために、これは不可能である。
【0025】
図3は、設定点pTを中心に交番している、v(t)によって制御された機構pcuffを示す。制御条件は、v(t)、したがって手指内の血液量を一定に保つことである。v(t)を、vAC(t)の最小振幅に維持すればよい。制御システムの逆特性に留意されたい。PPG信号の逆特性のため、v(t)の増大はpcuffを低下させ、v(t)の低減はpcuffを増大させる。
【0026】
いくつかの実施例では、2つ以上の制御ループを有すると有利である。図4は、そのような制御システムのブロック図を示す。この一般的な実施例では、v(t)を、異なる複数の周波数範囲に分割する。fVLF及びfLFにカットオフ周波数を有するフィルタを用いて、拍動性vAC(t)、低周波vLF(t)及び超低周波vVLF(t)を得る。これらの3つの周波数範囲が異なる利得gAC、gLF及びgVLFを有するとさらに有利である。これは、v(t)に対する最適な利得の使用を可能にする。
【0027】
拍動性の残留PPG信号vAC(t)及びv(t)の他の周波数帯、並びに制御システムの状態変数(例えば利得、カットオフ周波数など)を、測定されたpcuff(t)をp++(t)に強化する目的に使用することができる多変量伝達関数Tに対して使用することができる。式(2)は、n個の制御ループを使用するときのより一般的な式である。
p++(t)=p(t)+T[v1(t),v2(t)...vn(t);g1,g2...gn;fc1,fc2...fcn] (2)
0.1Hzよりも低い周波数範囲はp++(t)に寄与しないことが分かっている。vAC(t)及びvLF(t)だけが有意味な信号(meaningful signal)に寄与するため、図4に記載された実施例に対する式(2)は以下のように単純化される。
p++(t)=p(t)+T[vAC(t),vLF(t);gAC,gLF;fLF,fVLF] (3)
正しい設定点が使用されているときには線形関数を使用することができる。図2〜4から分かるように、正しい設定点において、pTは傾きが最大の点であり、したがって拍動性vAC(t)、低周波vLF(t)及び超低周波vVLF(t)は最大に達する。線形補間を以下のように近似することができる。
p++(t)=p(t)+T[vAC(t)・gAC vLF(t)・gLF] (4)
上式で、Tは、線形補間後の残留伝達関数を示す。1つの実例では、Tを、線形化された異なるv(t)×利得倍数間の異なるスケーリング・ファクタ(scaling factor)のベクトルとすることができる。
【0028】
生理的理由から、異なる部位(例えば手指、上腕、手首、脚など)で測定したとき、脈の波形は異なる。したがって、手指の動脈110で測定した血圧は人体の他の領域で測定した血圧とは異なるため、手指動脈圧デバイスは標準デバイスに比べて正確さに欠ける。
【0029】
VUT圧力信号pcuff(t)を強化する1つの方法、したがってVUT圧力信号pcuff(t)の正確さを高める1つの方法は、手指で測定された信号vを、標準上腕血圧計(NBP)に対して較正する方法である。これを実行する1つの理由は、上腕は心臓の高さにほぼ近いが、手指はどこにでも置くことができるため、手指の動脈で測定したBPには、上腕に比べて生理的及び静水学的な固有差があることである。さらに、BPの脈圧(PP)は制御ループ利得(1つ又は複数)に依存し、これらの利得は、制御システムに由来するパラメータであって、生理的パラメータではない。この利得が、vAC(t)の最大振幅から「physiocal」基準に従って決定されるとき、この振幅は、実際の血管緊張(vascular tone)(血管収縮又は血管拡張)に依存する。これはBPに関する情報を持たない。この利得(1つ又は複数)が、システムが共振周波数で振動し始めるまで利得を増大させることによって経験的に選択されるときにも、これらの利得(1つ又は複数)は血管緊張及びシステム条件に依存する。この場合も、これはBPに関する情報を持たない。
【0030】
vAC(t)の最大振幅は、探索モードにおける一定のカフ圧力が平均BPに等しいことを示しているに過ぎない。vAC(t)の最大振幅は実際の血管緊張(血管収縮又は血管拡張)に依存し、したがって測定対象患者の自律神経系の状態に依存するため、この値自体は、「住居の番地表示(house number)」のようなものである。
【0031】
較正方法は、直線に沿って信号を変換することを含む。
p++(t)=k×pcuff(t)+d (5)
上式で、k及びdは、NBP値から以下のように計算することができる。
【0032】
【数2】
上式で、SBP及びDBPは、NBP較正デバイス(例えば上腕血圧カフ)によって測定した収縮期及び拡張期の値であり、sBP及びdBPは、較正されていない手指カフによって測定した収縮期及び拡張期の値である。
【0033】
傾きkは、BPパルスをスケーリング(scaling)しているだけでなく、低血圧及び高血圧エピソード(episode)をもスケーリングしているため、この方法は正確さに欠ける。この改良されたVUTシステムによって平均BPは正しく検出されるため、このBPトレンドは人為的な増幅を必要としない。高いk値はBPトレンドを過大評価する。例えば、k=2のとき、40mmHgのBPの低下は80mmHgとして表示されることになる。このような方法を用いると負の値さえも表示されうる。さらに、この方法は、BPの自然な調律、例えば0.1Hzのトラウベ−ヘーリング−マイヤー波を増幅し、BPの自然な調律を、非常に非生理的な調律であるかのように見せる。
【0034】
図5は、PPGシステムによって測定される信号の正確さをさらに向上させる方法を示す。この方法は、あるしきい値よりも高い周波数内容、例えば0.3Hzよりも高い周波数内容を有する信号の成分に、傾きkを乗じることだけを含む。このカットオフ周波数よりも低い信号成分は増幅しない。さらにオフセットdを加算する。したがって増幅式は以下のようになる。
p++(t)=k×pAC(t)+pLF(t)+d (8)
上式で、pAC(t)は、しきい周波数よりも大きな周波数を有する測定された圧力の成分であり、pLF(t)は、しきい周波数よりも低い周波数を有する測定された圧力の成分である。
【0035】
脈波周波数内容は本質的に、実際の脈拍数又は脈周波数(pulse frequency)よりも高い。60拍/分の正常な脈拍数では脈周波数が1Hzであり、ヒトではこの周波数が0.5Hz(30拍/分)まで下がる。
【0036】
(例えば手指での波形から上腕での波形へ)脈の波形を伝達するために伝達関数を使用するとき、この伝達関数は、約0.3Hzである最も低い可能な拍動周波数におけるその周波数範囲から始まる。それよりも低い周波数では伝達関数は一定になりうる。その伝達関数が脈周波数に依存する場合にはさらに有利であろう。これは、秒の代わりに心拍動に対して正規化することによって達成することができる。
pbrach(t)=Tnorm(p++(t))=
pbrach(t)=Tnorm(k×pAC(t)+pLF+d)=
pbrach(t)=pLF+d+Tnorm(k×pAC(t)) (9)
【0037】
式(9)から分かるように、変換しなければならないのは脈周波数内容pAC(t)だけである。これは、それよりも低い周波数に対してはTnormが一定である(例えば1)ためである。このアルゴリズムをPCA法の一部とすることができ、このアルゴリズムは、本発明のデバイス内で計算することができる。
【0038】
VUT信号を検出し強化する、知られている方法の他の問題は、根底をなすPPGシステムが、血管収縮又は血管拡張に起因する血液量の変化(血管運動による変化)を検出することができないことである。このような変化は例えば薬物によって引き起こされることがある。言い換えると、PPGシステムは、血管活動に起因するv(t)の変化と実際の血圧の変化とを区別することができない。したがって、BP波形をさらに強化するため、アルゴリズムをして、血管運動による変化に起因する血管(例えば手指の動脈)の変化を検出してもよい。このアルゴリズムは、血管運動による活動が活発なBP周波数帯、0.02Hzよりも低い超低周波(VLF)帯を強化する。このVLF帯は、トラウベ−ヘーリング−マイヤー波(0.1Hz)及び呼吸周波数(約0.2Hz)よりも低い。トラウベ−ヘーリング−マイヤー波と呼吸周波数はともにいわゆるLFループ内で処理されるため、本明細書では、これらをともにLF帯と呼ぶことに留意されたい。
【0039】
VLF帯は、生理的な又は薬物誘発性の血管収縮又は血管拡張に起因する血管運動による変化によって妨害される。図6は、新たなS字形の伝達関数を用いて示した血管収縮に起因するv(t)の一般的な変化を示す。pcuffは設定点pT1のままだが、設定点pT2の方が正しいであろう。振幅は小さくなるが、血管収縮はさらに、より著しい波形の変化を生成する。VLF帯を再構成するのにこの振舞いが使用される。
【0040】
これらの血管活動がBPの生理的変化を引き起こすことがある。BP信号は、VLF帯の除去及び再構成によって強化される。このアルゴリズムは、探索モードにおいて出発設定点pT0を見つけ、少なくとも1つの制御ループに対する少なくとも1つの利得係数を決定した後に制御ループが閉じられたときのその機能から始まる。pT0は実際の平均BPに等しい。
【0041】
既に説明したとおり、制御システムの利得は無限大にはなりえず、したがってvAC(t)はゼロではない。したがって、厳密にはpcuffはpartに等しくない。vAC(t)が負の場合(収縮期のpart)、pcuffはpartに追従している(pcuff<part)。vAC(t)がその正の(拡張期)半波にあるときには、pcuffはpartに先行している(pcuff>part)。
【0042】
利得(1つ又は複数)がゼロに設定された例を考える。図2aに示されているこの状況では、pT0及びpcuffが平均BPにあり、vAC(t)はその最大振幅を有する。負の曲線の下の面積は、拍動の正の半波の下の面積に等しい。したがって、平均BPを指示するpcuffに比べてpartの方が大きい頻度とpartの方が小さい頻度とが同じである。このことは、設定点pT0が正しいことを示している。したがって、この現象を設定点追従に使用することができる。
【0043】
交番する信号の負の半波と正の半波が等しいとき、以下の式は真である。
【0044】
【数3】
【0045】
1回の拍動全体にわたるこのvAC(t)のこの積分がゼロでないとき、波形は変化している。図2はこの現象を記述している。2aは、vAC(t)の正の半波と負の半波が等しいことを示しており、2bは、低い設定点及びより大きな負の半波を有する信号を示しており、2cは、高い設定点及びより大きな正の半波を有する信号を示している。
【0046】
式(10)は、設定点の変化を指示しているn番目の拍動に対する制御偏差Pnを計算する。
【0047】
【数4】
上式で、Pn=0→設定点は正しい
Pn<0→設定点を低く
Pn>0→設定点を高く
【0048】
利得(1つ又は複数)がゼロでなく、pcuffがpartに先行/追従し、vAC(t)が最小化されているときも、この現象は真である。血管運動による変化によってs字形のp−v伝達関数が変化したときも、この現象は真である。
【0049】
次に、比例制御偏差Pを使用してVLF帯を再構成する。そのために、比例制御偏差Pはさらに積分部分Iを必要とし、n番目の拍動に対する新たな設定点は以下のとおりである。
【0050】
【数5】
【0051】
制御ループ利得gI及びgPは、拍動性部分に対する利得gAC及び生理的な調律に従って決定される。
【0052】
この追従(又は再構成)アルゴリズムは、高域フィルタ(例えばディジタル・フィルタ)を用いたVLF帯の除去を可能にする。(例えば)0.02Hzよりも低い全ての周波数内容を除去し、LF帯及び拍動性のAC成分だけを使用する。vAC(t)は、測定されたPPG信号v(t)からvVLF(t)を差し引くことによって計算するのであって、信号vDCのDC成分を差し引くことによって計算するのではないことに留意されたい。
【0053】
図7は、単一の時間変化入力信号と、動脈内カテーテル又は非侵襲デバイスと、いくつかの入力パラメータとを有する先行技術のPCAを示す。PCAに対してVUTを使用するとき、pcuffはpartに等しくない。これは、残留PPG信号vAC(t)によって指示される。さらに、制御システムの状態変数は血管運動による変化を指示する。この残留情報を使用してPCAアルゴリズムを強化することもできる。
【0054】
vAC(t)のような追加の入力信号(1つ又は複数)及び(平均BPに等しい)設定点pTを決定するための信号を含むように拡張しなければならないため、標準PCA法を使用することはできない。血管運動による変化のため設定値を補正しなければならないかどうかを指示するPnが有意味な信号であることもある。血管特性を決定するために他の状態変数を使用することもできる。
【0055】
図8は、PCA法及びPCAデバイスのブロック図を示す。VUT部分は、圧力pcuff(t)、vAC(t)及びPn、並びに状態変数を提供する。
【0056】
この方法はさらに、強化された圧力信号p++を計算する方法を含むことができる。この方法はさらに、CO、SV、SVV、PPV、動脈壁硬化などのようなPCAパラメータを計算し、これらのパラメータ及びp++を提供し、表示する。この方法はさらに、標準NBPから(収縮期BP、平均BP及び拡張期BPのような)間欠的なBPの読みを得ることができる。この方法はさらに、IBP入力を有する他のデバイスのスケーリング・ファクタを知るために、そのようなデバイスからの励振電圧を含むことができる。
【0057】
先行技術のPCA法が圧力入力又はPPG入力を1つだけ有するのに対して複数の入力信号を有するため、このPCA法は、多ポート・ネットワーク又は多ポート・アルゴリズムである。
【0058】
このPCA法はこれらの複数の入力を処理する。この方法の一実施例は、最初にp++を計算し、次いでそのp++を標準PCAに対して使用する逐次モードである。この方法を使用すると、血管運動による変化に関する情報が失われることがある。したがって、好ましい実施例は、線形及び非線形の多ポート・アルゴリズムを使用する。さらに、これらのアルゴリズムは、入力時系列から信号マーカ(signal marker)を計算することができ、この信号マーカは例えば、曲線の下又は曲線の一部分の下の面積、信号のデューティ・サイクル、比(例えば(平均BP−拡張期BP)/(収縮期BP−拡張期BP))、拡張期減衰(diastolic decay)、これらの信号及び対数信号統計的モーメント(logarithmic signal statistical moment)の線形回帰などである。これらのマーカを、(身長、体重、年齢、性別などのような)人体計測患者情報(anthropometric patient information)並びにVUT制御システムによって得られた情報及びVUT制御システムの状態変数とともに使用して、PCAパラメータを計算することができる。この計算は、多変量多項式から実施することができる。このような多変量式の重みは、生理的なアプリオリ情報から決定することができ、又は訓練セットを使用した機械学習法によって訓練することができる。
【0059】
血圧信号を強化するこの方法とともに、高さ補正システムを使用することもできる。このような高さ補正システムは、血液の密度に一致した密度を有する流体で満された管を含むことができる。管の一端を心臓の高さに配置し、他端を手指カフ上に配置する。管の心臓側端に、流体が漏れることを防ぐ自由浮動膜を取り付けることができる。手指側端に配置され、流体に直接に接続された圧力センサが、静水力学的な圧力差を測定する。この高さ補正システムの圧力センサは、センサ位置において周波数信号又はディジタル信号が生成され、その信号が全体制御システムに提示されるように構築することができる。
【0060】
強化された又は変更された前述の信号を他のデバイス、例えば市販の患者モニタに提供することは望ましいであろう。これらは全て標準IBP圧力用の入力を有するからである。したがって、この非侵襲信号をスクリーン上に表示することができ、他の監視デバイスに配布することができる。大部分の患者モニタは、動脈内血圧(IBP)を測定するための圧力変換器用のインタフェースを有する。このIBPインタフェースは、血圧信号を電圧にスケーリングする目的に使用される励振電圧を提供する。この強化された信号をさらに、図9に関して説明するものなどの他のデバイス又はコンピュータに、ディジタル方式で配布することができる。同じことが、SV、CO、SVV、PPV、TPR、動脈壁硬化などのような計算された全ての値、並びに強化された収縮期BP値、拡張期BP値及び平均BP値についても言える。
【0061】
スケーリング範囲及びスケーリング・ファクタを決定するため、患者モニタは励振電圧を提供する。最低及び最高圧力は仕様書から知られている。この励振電圧はこの方法への入力の役割を果たすことができ、p++(t)又はpbrach(t)を、動脈内変換器の出力電圧を模倣する電圧a++(t)に変換することができる。変換され、強化された信号は別のデバイスへ送られる。a++(t)は、このデバイスのマイクロプロセッサ/コンピュータのアナログ出力によって、外部DACによって、又はPWM出力及びそれに続くRCフィルタを使用することによって供給することができる。
【0062】
図9は、本出願のシステム及び方法に関連付けることができる例示的なコンピューティング・デバイス200を示すブロック図である。コンピューティング・デバイス200は、信号の変更、値の計算及びアルゴリズムの実行を含む本出願の方法を実行することができる。
【0063】
ごく基本的な構成201では、コンピューティング・デバイス200が一般に、1つ又は複数のプロセッサ210及びシステム・メモリ220を含む。プロセッサ210とシステム・メモリ220の間の通信には、メモリ・バス230を使用することができる。
【0064】
所望の構成に応じて、プロセッサ210は、限定はされないがマイクロプロセッサ(μP)、マイクロコントローラ(μC)、ディジタル信号プロセッサ(DSP)又はこれらの任意の組合せを含む、任意のタイプのプロセッサとすることができる。プロセッサ210は、1次キャッシュ211及び2次キャッシュ212、プロセッサ・コア213、レジスタ214など、もう1レベルのキャッシングを含むことができる。プロセッサ・コア213は、算術論理ユニット(ALU)、浮動小数点ユニット(FPU)、ディジタル信号処理コア(DSPコア)又はこれらの任意の組合せを含むことができる。プロセッサ210と一緒にメモリ・コントローラ215を使用することもでき、又は、実施態様によっては、メモリ・コントローラ215をプロセッサ210の内部部品とすることもできる。
【0065】
所望の構成に応じて、システム・メモリ220は、限定はされないが揮発性メモリ(RAMなど)、不揮発性メモリ(ROM、フラッシュ・メモリなど)又はこれらの任意の組合せを含む、任意のタイプのシステム・メモリとすることができる。システム・メモリ220は一般に、オペレーティング・システム221、1つ又は複数のアプリケーション222及びプログラム・データ224を含む。例えば、PPGシステムからある入力を受け取り、それらの入力から判断を下すように、アプリケーション222を設計することができる。例えば、PPGシステム、NBP及び潜在的な他のシステムから入力を受け取るように、アプリケーションを設計することができる。出力として、アプリケーション222は、本明細書において既に説明した方法のうちの任意の方法を実行し、より忠実度が高いBP信号を提供することができる。
【0066】
コンピューティング・デバイス200は、追加の特徴又は機能、及び基本構成201間の通信を容易にする追加のインタフェースを有することができる。例えば、記憶インタフェース・バス241を介した基本構成201と1つ又は複数のデータ記憶デバイス250との間の通信を容易にするために、バス/インタフェース・コントローラ240を使用することができる。データ記憶デバイス250は、取外し可能な記憶デバイス251、取外しができない記憶デバイス252又はこれらの組合せとすることができる。少し例を挙げれば、取外し可能な記憶デバイス及び取外しができない記憶デバイスの実例には、フレキシブル・ディスク・ドライブ、ハードディスク・ドライブ(HDD)などの磁気ディスク・デバイス、コンパクト・ディスク(CD)ドライブ、ディジタル・バーサタイル・ディスク(DVD)ドライブなどの光ディスク・ドライブ、ソリッド・ステート・ドライブ(SSD)及びテープ・ドライブなどがある。例示的なコンピュータ記憶媒体には、コンピュータ可読命令、データ構造、プログラム・モジュール又は他のデータなどの情報を記憶する任意の方法又は技術において実現された、揮発性及び不揮発性の取外し可能な媒体及び取外しができない媒体が含まれる。
【0067】
システム・メモリ220、取外し可能な記憶装置251及び取外しができない記憶装置252は全てコンピュータ記憶媒体の実例である。コンピュータ記憶媒体には、限定はされないが、RAM、ROM、EEPROM、フラッシュ・メモリ若しくは他のメモリ技術、CD−ROM、ディジタル・バーサタイル・ディスク(DVD)若しくは他の光学記憶装置、磁気カセット、磁気テープ、磁気ディスク記憶装置若しくは他の磁気記憶デバイス、又は所望の情報を記憶する目的に使用することができ、コンピューティング・デバイス200がアクセスすることができる他の媒体が含まれる。このようなコンピュータ記憶媒体はデバイス200の一部とすることができる。
【0068】
バス/インタフェース・コントローラ240を介したさまざまなインタフェース装置から基本構成201への通信を容易にするため、コンピューティング・デバイス200はさらにインタフェース・バス242を含むことができる。例示的な出力インタフェース260は図形処理ユニット261及び音声処理ユニット262を含み、これらの処理ユニットは、1つ又は複数のA/Vポート263を介してディスプレイ、スピーカなどのさまざまな外部デバイスに情報を伝達するように構成することができる。例示的な周辺インタフェース260は、シリアル・インタフェース・コントローラ271又はパラレル・インタフェース・コントローラ272を含み、インタフェース・コントローラは、1つ又は複数のI/Oポート273を介して、入力デバイス(例えばキーボード、マウス、ペン、音声入力デバイス、タッチ入力デバイスなど)又は他の周辺デバイス(例えばプリンタ、スキャナなど)などの外部デバイスと通信するように構成することができる。例示的な通信インタフェース280はネットワーク・コントローラ281を含み、ネットワーク・コントローラ281は、1つ又は複数の通信ポート282を介した、ネットワーク通信を横切る、1つ又は複数の他のコンピューティング・デバイス290との通信を容易にするように構成することができる。この通信接続は通信媒体の1つの実例である。通信媒体は一般に、コンピュータ可読命令、データ構造若しくはプログラム・モジュールによって、又は搬送波若しくは他の輸送機構などの被変調データ信号中の他のデータによって具体化され、通信媒体は一般に任意の情報送達媒体を含む。「被変調データ信号」は、情報をその中にコード化するような方式で設定され又は変更されたその特性うちの1つ又は複数の特性を有する信号とすることができる。一例として、限定はされないが、通信媒体は、有線ネットワーク、直接有線接続などの有線媒体、及び音声、無線周波(RF)、赤外(IR)無線媒体などの無線媒体を含むことができる。本明細書で使用するとき、用語コンピュータ可読媒体は記憶媒体と通信媒体の両方を含むことができる。
【0069】
コンピューティング・デバイス200は、携帯電話、パーソナル・データ・アシスタント(PDA)、パーソナル・メディア・プレーヤ・デバイス、無線ウェブ閲覧デバイス、パーソナル・ヘッドセット・デバイス、特定用途向けデバイス又は上記の機能のうちの任意の機能を含むハイブリッド・デバイスなどの小フォーム・ファクタの可搬式(又は移動式)電子デバイスの一部として実現することができる。コンピューティング・デバイス200は、ラップトップ・コンピュータ構成と非ラップトップ・コンピュータ構成の両方を含むパーソナル・コンピュータとして実現することもできる。
【0070】
医師は、心臓の高さで得た血圧値に対して使用される。手指は、静水力学的に異なる高さに置くことができるため、手指と心臓の高さの間に延ばした水を満した管によって、これらの2つの部位間の差を補正することができる。したがって、手指センサ及び心臓の高さの静水力学的な差を除去するために、高さ補正システムを使用することができる。
【0071】
ある種の実施例及び用途に関して本発明を説明したが、当業者は、本発明の着想の趣旨に依然として含まれる変更、修正、改変等を認識する。そのような変更、修正、改変等は、以下の特許請求の範囲に記載された本発明の範囲に含まれることが意図されている。
【特許請求の範囲】
【請求項1】
血圧輪郭曲線を決定する方法であって、
ヒトの手指の動脈の上にフォトプレスチモグラフィ(PPG)システムを配置すること
を含み、前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、少なくとも1つの光源及び少なくとも1つの光検出器を含み、
前記方法がさらに、
予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更すること、並びに
変更された前記PPG信号の前記成分を少なくとも使用して血圧信号を計算すること
を含む方法。
【請求項2】
前記手指の前記動脈にカフをあてがい、前記PPG信号によって前記カフ内の圧力を制御し、前記カフ圧力及び前記変更されたPPG信号を使用して新たな血圧を計算する、請求項1に記載の方法。
【請求項3】
予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更することが、
前記PPG信号を、前記予め規定されたしきい周波数よりも高い周波数を有する第1の成分と、前記予め規定されたしきい周波数よりも低い周波数を有する第2の成分とに分離すること、
前記第1の成分を変更すること、及び
変更された前記第1の成分を前記第2の成分に加算して、変更されたPPG信号を生成すること、
前記変更されたPPG信号及び前記カフ圧力を使用して前記血圧信号を計算すること
を含む、請求項2に記載の方法。
【請求項4】
前記変更が、予め規定されたしきい周波数よりも高い周波数を有する前記血圧信号の成分を、ヒトの上腕の動脈上に配置された血圧計によって得た血圧値を使用して較正することを含む、請求項2に記載の方法。
【請求項5】
前記変更が、予め規定されたしきい周波数よりも高い周波数を有する前記血圧信号の成分に較正係数を乗じることを含み、前記較正係数が、ヒトの上腕の動脈上に配置された血圧計からの血圧測定値から計算される、請求項2に記載の方法。
【請求項6】
前記しきい周波数が約0.3Hzである、請求項2に記載の方法。
【請求項7】
前記変更が、前記PPG信号から、前記PPG信号の望んでいない部分を除去すること、及び前記PPG信号の残留部分から前記PPG信号を再構成することを含む、請求項1に記載の方法。
【請求項8】
前記計算が人体計測パラメータを使用する、請求項2に記載の方法。
【請求項9】
前記血圧輪郭曲線から生理パラメータを計算することをさらに含む、請求項2に記載の方法。
【請求項10】
前記パラメータが、多ポート・アルゴリズムを使用することによって計算される、請求項9に記載の方法。
【請求項11】
前記パラメータが、入力信号の1つ又は複数のマーカを使用することによって計算される、請求項9に記載の方法。
【請求項12】
血圧輪郭曲線を決定するコンピューティング・デバイスであって、
ヒトの手指の動脈の上に配置されるように適合された圧力カフであり、少なくとも1つの光源及び少なくとも1つの光検出器を有するPPGシステムを含む圧力カフと、
圧力センサと、
前記カフ内の圧力を制御するコントローラと
を備え、
前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、前記PPG信号を使用して圧力信号が計算され、前記カフ及び前記手指に前記圧力信号が加えられ、
前記コンピューティング・デバイスが、予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更し、前記カフ圧力及び変更された前記PPG信号を使用して血圧信号を計算する
コンピューティング・デバイス。
【請求項13】
前記コントローラから制御状態情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項14】
較正デバイスから情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項15】
別のデバイスからスケーリング情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項16】
静水力学的補正システムから情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項17】
患者から人体計測情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項18】
1つ又は複数の入力信号から生理パラメータを計算する、請求項12に記載のコンピューティング・デバイス。
【請求項19】
連続非侵襲動脈圧デバイスの望んでいない信号内容を除去する方法であって、
フォトプレスチモグラフィ(PPG)システムを有するカフをヒトの手指の動脈の上に配置すること
を含み、前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、前記PPG信号によってカフ圧力が制御され、
前記方法がさらに、
前記PPG信号から、前記PPG信号の望んでいない部分を除去すること、及び
前記PPG信号の残留部分から前記PPG信号を再構成すること
を含む方法。
【請求項20】
前記再構成が、前記PPG信号の残留部分のうちの拍動性部分から計算される、請求項19に記載の方法。
【請求項21】
再構成された前記PPG信号が
【数1】
である、請求項20に記載の方法。
【請求項22】
前記PPG信号の前記望んでいない部分を有する前記PPG信号の部分が所定の周波数よりも低い、請求項18に記載の方法。
【請求項1】
血圧輪郭曲線を決定する方法であって、
ヒトの手指の動脈の上にフォトプレスチモグラフィ(PPG)システムを配置すること
を含み、前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、少なくとも1つの光源及び少なくとも1つの光検出器を含み、
前記方法がさらに、
予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更すること、並びに
変更された前記PPG信号の前記成分を少なくとも使用して血圧信号を計算すること
を含む方法。
【請求項2】
前記手指の前記動脈にカフをあてがい、前記PPG信号によって前記カフ内の圧力を制御し、前記カフ圧力及び前記変更されたPPG信号を使用して新たな血圧を計算する、請求項1に記載の方法。
【請求項3】
予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更することが、
前記PPG信号を、前記予め規定されたしきい周波数よりも高い周波数を有する第1の成分と、前記予め規定されたしきい周波数よりも低い周波数を有する第2の成分とに分離すること、
前記第1の成分を変更すること、及び
変更された前記第1の成分を前記第2の成分に加算して、変更されたPPG信号を生成すること、
前記変更されたPPG信号及び前記カフ圧力を使用して前記血圧信号を計算すること
を含む、請求項2に記載の方法。
【請求項4】
前記変更が、予め規定されたしきい周波数よりも高い周波数を有する前記血圧信号の成分を、ヒトの上腕の動脈上に配置された血圧計によって得た血圧値を使用して較正することを含む、請求項2に記載の方法。
【請求項5】
前記変更が、予め規定されたしきい周波数よりも高い周波数を有する前記血圧信号の成分に較正係数を乗じることを含み、前記較正係数が、ヒトの上腕の動脈上に配置された血圧計からの血圧測定値から計算される、請求項2に記載の方法。
【請求項6】
前記しきい周波数が約0.3Hzである、請求項2に記載の方法。
【請求項7】
前記変更が、前記PPG信号から、前記PPG信号の望んでいない部分を除去すること、及び前記PPG信号の残留部分から前記PPG信号を再構成することを含む、請求項1に記載の方法。
【請求項8】
前記計算が人体計測パラメータを使用する、請求項2に記載の方法。
【請求項9】
前記血圧輪郭曲線から生理パラメータを計算することをさらに含む、請求項2に記載の方法。
【請求項10】
前記パラメータが、多ポート・アルゴリズムを使用することによって計算される、請求項9に記載の方法。
【請求項11】
前記パラメータが、入力信号の1つ又は複数のマーカを使用することによって計算される、請求項9に記載の方法。
【請求項12】
血圧輪郭曲線を決定するコンピューティング・デバイスであって、
ヒトの手指の動脈の上に配置されるように適合された圧力カフであり、少なくとも1つの光源及び少なくとも1つの光検出器を有するPPGシステムを含む圧力カフと、
圧力センサと、
前記カフ内の圧力を制御するコントローラと
を備え、
前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、前記PPG信号を使用して圧力信号が計算され、前記カフ及び前記手指に前記圧力信号が加えられ、
前記コンピューティング・デバイスが、予め規定されたしきい周波数よりも高い周波数を有する前記PPG信号の成分を変更し、前記カフ圧力及び変更された前記PPG信号を使用して血圧信号を計算する
コンピューティング・デバイス。
【請求項13】
前記コントローラから制御状態情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項14】
較正デバイスから情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項15】
別のデバイスからスケーリング情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項16】
静水力学的補正システムから情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項17】
患者から人体計測情報を受け取る、請求項12に記載のコンピューティング・デバイス。
【請求項18】
1つ又は複数の入力信号から生理パラメータを計算する、請求項12に記載のコンピューティング・デバイス。
【請求項19】
連続非侵襲動脈圧デバイスの望んでいない信号内容を除去する方法であって、
フォトプレスチモグラフィ(PPG)システムを有するカフをヒトの手指の動脈の上に配置すること
を含み、前記PPGシステムが、前記動脈の体積に基づくPPG信号を生成し、前記PPG信号によってカフ圧力が制御され、
前記方法がさらに、
前記PPG信号から、前記PPG信号の望んでいない部分を除去すること、及び
前記PPG信号の残留部分から前記PPG信号を再構成すること
を含む方法。
【請求項20】
前記再構成が、前記PPG信号の残留部分のうちの拍動性部分から計算される、請求項19に記載の方法。
【請求項21】
再構成された前記PPG信号が
【数1】
である、請求項20に記載の方法。
【請求項22】
前記PPG信号の前記望んでいない部分を有する前記PPG信号の部分が所定の周波数よりも低い、請求項18に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2013−509226(P2013−509226A)
【公表日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−535959(P2012−535959)
【出願日】平成22年10月29日(2010.10.29)
【国際出願番号】PCT/IB2010/003325
【国際公開番号】WO2011/051822
【国際公開日】平成23年5月5日(2011.5.5)
【出願人】(512110835)シーエヌシステムズ メディジンテクニク アクチェンゲゼルシャフト (2)
【Fターム(参考)】
【公表日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【国際出願番号】PCT/IB2010/003325
【国際公開番号】WO2011/051822
【国際公開日】平成23年5月5日(2011.5.5)
【出願人】(512110835)シーエヌシステムズ メディジンテクニク アクチェンゲゼルシャフト (2)
【Fターム(参考)】
[ Back to top ]