
進路報知装置、判定結果送信装置、これらの装置の制御方法、これらの装置を含む指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】表示部が無くとも、指示方位に基づいて進路を直感的に理解でき、また携帯性にも優れる。
【解決手段】筐体の位置を示す位置情報を取得するGPS受信制御部45Aと、筐体の姿勢を示す姿勢情報を取得する親機6軸センサ51Bと、位置情報及び姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する対親機通信制御部41Aと、取得した前記進路判定結果を報知するバイブレータ8又はLED9を備える。
【解決手段】筐体の位置を示す位置情報を取得するGPS受信制御部45Aと、筐体の姿勢を示す姿勢情報を取得する親機6軸センサ51Bと、位置情報及び姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する対親機通信制御部41Aと、取得した前記進路判定結果を報知するバイブレータ8又はLED9を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、指示方位に基づいて進路を直感的に理解できる進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体に関するものである。
【背景技術】
【0002】
従来、複数の衛星からの電波を受信して自装置の位置を検出可能なGPS(Global Positioning System)受信機などを応用した幾つかの製品が開発されており、例えば、GPS受信機を用いたカーナビゲーションは多くのユーザーに使用されている。GPS受信機を用いることにより自装置の現在位置を示す経度、緯度及び高度といった位置情報を簡単に取得することが可能であり、カーナビゲーションシステムはこの位置情報をシステムに搭載した地図上の進路情報と照合させてドライバーに対し道順を指示できるようにしている。
【0003】
また、近年、GPS受信機を用いたカーナビゲーションシステム以外の個人用のナビゲーションシステムも開発されており、カーナビゲーション以外の分野でもGPS受信機による進路案内が可能になっている。
【0004】
さらに、個人用のナビゲーションシステムとしてGPS受信機内蔵の携帯電話にナビゲーションシステムを搭載した技術も開発されている。
【0005】
一方、GPS受信機のみを搭載した技術では、現在位置を示す経度、緯度及び高度といった位置情報を簡単に取得することはできるが、自装置の装置方向などの検出はできない。
【0006】
このような問題を解決するために、地磁気センサと加速度センサとを組合せた6軸センサを用いた携帯機器が、特許文献1に開示されている。
【0007】
特許文献1に開示された技術によれば、携帯機器の収納方向にかかわらず、正確に位置情報や地磁気に対する向き、携帯機器の所持者の移動方向などが計測できるようになっている。
【0008】
以上のようなGPS受信機や6軸センサなどを利用した従来技術の例として特許文献2には、地図を用いてユーザーを目的地に誘導するのではなく、目的地の方向を指示することによってユーザーを誘導できる方向指示装置が開示されている。
【0009】
さらに、特許文献3には、表示装置本体の体勢及び/又は移動についての状態を検出し、装置本体の体勢、移動などの状況に合致させた状態で表示内容が変化するように構成された表示装置が開示されている。
【0010】
一方、進路案内を目的とする技術ではないが、特許文献4には、アドレスしたい物へ向けて指し示し得る手持ち式装置が、現在アドレスされている物と判断された物に関する情報を、ユーザ・インターフェースに提示する技術が開示されている。
【特許文献1】特開2004− 364197号公報(平成16年12月24日公開)
【特許文献2】特開平10 − 197277号公報(平成10年 7月31日公開)
【特許文献3】特開平 9 − 311625号公報(平成 9年12月 2日公開)
【特許文献4】特表2004− 531791号公報(平成16年10月14日公表)
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、上記従来のカーナビゲーションシステムや、個人用のナビゲーションシステムでは、地図を表示可能な大きさのディスプレイが必要であり、さらに、地図情報を蓄積しておくために記憶容量の大きな外部記憶媒体を搭載する必要がある。従って、これらのナビゲーションシステムを小型化することは難しく携帯性の向上が困難であり、また、価格も高価となってしまうという問題点がある。この点は、特許文献3に開示された表示装置についても同様である。
【0012】
また、特許文献1に開示された6軸センサを用いた携帯機器では、音声や表示によってナビゲーションを行なうシステムなので、ユーザは、音声や表示の内容を理解する必要があり、面倒であるという問題点がある。
【0013】
また、特許文献2に開示された方向指示装置では、指示方向を矢印で表示するため、当該表示のための表示部が必要であり、さらなる携帯性の向上は難しく、また、ユーザは、矢印が示す方向を現実の地上における方位と照らし合わせて理解する必要があり、面倒であるという問題点がある。
【0014】
そうすると、ユーザの利便性を向上させるためには、進路案内処理については表示部が無くとも、指示方位に基づいてユーザが進路を直感的に理解できるような工夫がなされた携帯性の優れた案内装置の開発が好ましい。
【0015】
本発明は、前記従来の問題点に鑑みなされたものであって、その目的は、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0016】
本発明の進路報知装置は、前記課題を解決するために、筐体の位置を示す位置情報を取得する位置情報取得手段と、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えていることを特徴としている。
【0017】
また、本発明の進路報知装置の制御方法は、前記課題を解決するために、筐体の位置を示す位置情報を取得する位置情報取得ステップと、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいることを特徴としている。
【0018】
前記構成又は方法によれば、本発明の進路報知装置又はその制御方法では、筐体の位置を示す位置情報を取得する位置情報取得手段を備える又は位置情報取得ステップを含む。
【0019】
それゆえ、筐体の位置を示す位置情報を取得することができる。なお、位置情報取得手段(位置情報取得ステップにおいて使用されるもの)の例としては、GPS受信機(global positioning system)、差分情報を用いて補正したDGPS受信機(差動GPS受信機)、及びフェムト通信などの基地局からの情報などにより筐体の絶対位置が特定できればどのような手段(ステップ)を用いても良いが、携帯性向上の観点からは、小型の素子である(小型の素子を用いる方法である)ことが好ましい。
【0020】
また、前記構成又は前記方法によれば、筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段を備える又は姿勢情報取得ステップを含む。
【0021】
それゆえ、筐体の姿勢を示す姿勢情報を取得することができる。なお、姿勢情報取得手段(姿勢情報取得ステップにおいて使用されるもの)の例としては、筐体の傾斜状態を検出する傾斜センサ機能、筐体の絶対的な方位(東西南北)を検出する方位センサ機能、筐体の移動(移動方向及び移動量)を検出する移動センサ機能を有する各種センサが例示できる。このような各種センサの例としては、例えば、加速度センサ、地磁気センサ及び傾斜角センサのいずれか1つか、これらのセンサを組合せた3軸又は6軸センサなどが例示できる。
【0022】
なお、前記姿勢情報取得手段を構成するこれらの各種センサの中では、特に、6軸センサが好ましい。
【0023】
このような6軸センサを搭載することにより、進路報知装置の姿勢の変化に精度良く追随して姿勢情報を取得することが可能となる。
【0024】
また、6軸センサは、加速度センサと地磁気センサとを組合せた構成としても良いが、単独で6軸センサとなり得る素子であっても良い。
【0025】
また、前記構成又は前記方法によれば、前記位置情報及び前記姿勢情報に基いて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段(進路判定結果取得ステップ)を備える(含む)。
【0026】
なお、進路判定結果を導出するための具体例については、例えば、前記現在位置における指示方位と所定の進路を示す進路情報とを照合することによって判断することが考えられる。
【0027】
例えば、前記現在位置における指示方位と、所定の進路を示す進路情報との照合の例としては、前記現在位置における指示方位に沿う方向の単位ベクトルの成分と、所定の進路に沿う方向の単位ベクトルの成分とを算出し、これらの単位ベクトルのなす角を算出して、この角と、所定の進路に沿う方向であるとして予め定められた角度範囲とを照合する方法をなどが例示できる。なお、所定の進路に沿う単位ベクトルの成分は、所定の進路が設定された際に、進路毎に予め算出して記憶させておくことが処理の迅速の観点から好ましい。
【0028】
ここで、ユーザの指示方位と、筐体の姿勢との関係について説明する。以下では、筐体自体の方向を装置方向と呼び、ユーザの指示方位と区別する。
【0029】
まず、筐体の姿勢に基づく装置方向が定義可能な筐体の例としては、長手方向と短手方向とを判別できる形状で構成された筐体などが考えられる。
【0030】
また、「長手方向と短手方向とを判別できる形状で構成された筐体」の例としては、筐体が、棒状体、筒状態、直方体、楕円体その他の筐体を特徴づける径に長手方向と短手方向との2方向の径が存在すると認識できる形状で構成されている筐体が例示できる。
【0031】
この場合、例えば、筐体の長手方向を装置方向と定義する。
【0032】
そうすると、ユーザの指示方位を前記筐体の長手方向の水平方向への射影とし、筐体の姿勢情報との関係を予め求めておけば、筐体の姿勢情報から筐体の長手方向が求まり、この長手方向から求まる射影がユーザの指示方位であると定義すれば良い。
【0033】
また、前記構成又は前記方法によれば、前記進路判定結果取得手段が(進路判定結果取得ステップで)取得した前記進路判定結果を報知する報知手段(報知ステップ)を備える(含む)。
【0034】
前記構成又は方法によれば、報知手段が又は報知ステップで、該所定の進路に沿うか否かの進路判定結果を報知するので、直感的に進路に沿っているか否かが理解できる。それゆえ、表示部が無くとも、指示方位に基づいてユーザが進路を直感的に理解できる。
【0035】
なお、前記進路判定結果の判定主体は、本発明の進路報知装置内にあっても良いし、以下で説明する判定結果送信装置のように本発明の進路報知装置と連携可能な別の端末装置や電子機器等の内部にあっても良い。
【0036】
例えば、以下で説明する前記判定主体としての進路判定手段が、本発明の進路報知装置と連携可能な別の端末装置や電子機器等の内部にある場合、例えば、以下で説明する判定結果送信装置の内部にある場合、本発明の進路報知装置は、前記判定結果送信装置へ前記位置情報及び前記姿勢情報を送信する情報送信手段を備える構成とする。
【0037】
前記構成によれば、進路報知装置と連携可能な別の端末装置や電子機器等に以下で説明する進路判定手段などによる判定処理を行なわせることができるため、進路報知装置の携帯性をより高めることができる。
【0038】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0039】
但し、IrDA及びIrSSのような赤外線無線の場合は、進路報知装置と以下で説明する判定結果送信装置との状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0040】
また、本発明の進路報知装置は、前記構成に加えて、前記報知手段は、発光素子によって構成されており、前記進路判定結果に基づいて前記発光素子を発光させても良い。
【0041】
また、本発明の進路報知装置は、前記構成に加えて、前記報知手段は、振動素子によって構成されており、前記進路判定結果に基づいて前記振動素子を振動させても良い。
【0042】
すなわち、報知手段(報知ステップにおいて使用されるもの)の例としては、LED(light-emitting diode)などのユーザが進路を直感的に理解できる発光素子による発光や、バイブレータなどの振動素子による振動が利用できる。
【0043】
例えば、前記現在位置における指示方位が所定の進路に沿っている場合にLED(バイブレータ)が発光(振動)している状態としたり、逆に発光(振動)していない状態としたりすることが考えられる。ただし、進路報知装置の消費電力低減の観点からは、LED(バイブレータ)が発光(振動)している状態を前記現在位置における指示方位が所定の進路に沿っている場合とすることが好ましい。
【0044】
なお、発光素子としては、LEDの他、有機EL発光素子、無機EL発光素子等が例示できる。
【0045】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なう報知手段(報知ステップ)を備える(含む)ように構成すれば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0046】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた進路報知装置及びその制御方法を提供することができる。
【0047】
また、本発明の進路報知装置は、前記構成に加えて、前記進路判定結果取得手段は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することが好ましい。
【0048】
例えば、前記姿勢情報に基づいて決定された装置方向をペン先(前記長手方向に相当)とするペン型の進路報知装置の場合を考える。この場合、ユーザは、当該進路報知装置を使用しない場合には、胸のポケットなどに入れているものと考えられる。
【0049】
そこで、前記進路判定結果取得手段は、ペン先と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得するように構成する。
【0050】
例えば、ペン先が上向きであれば、ペン先と鉛直方向とのなす角が所定の角度範囲(例えば、およそ30度以外の角度)内となったときだけ前記取得動作を行なうようにする。
【0051】
以上の構成によれば、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が所定の角度範囲外であって、ユーザが進路報知装置を使用していないと想定される場合には、進路判定結果の取得動作を行なわないようにすることにより進路報知装置の無駄な電力消費を低減させることができる。
【0052】
なお、本発明の進路報知装置は、前記構成に加えて、前記進路判定結果取得手段は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することが好ましい。
【0053】
ここで、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かについては、例えば、前記位置情報に基づいて決定された位置と所定の地図情報とを照合することによって判断するようにすれば良い。
【0054】
ここで、「所定エリア」の例としては、「分岐エリア」や「特定エリア」などが例示できる。例えば、「分岐エリア」とは、地図情報における道路が複数交差した交差の中心を分岐点とすると、当該分岐点を含む所定範囲のことである。
【0055】
なお、「所定エリア」が「分岐エリア」の場合には、決定された位置が、所定エリア内に存在しているとのエリア判定結果の場合に前記進路判定結果を取得する。
【0056】
また、「特定エリア」とは、ユーザが進路案内処理を必要としないエリアとして予め定めたエリアのことである。
【0057】
「特定エリア」の例としては、港・駅・空港・建物内など進路案内が不要な施設等のエリアが例示できる。
【0058】
ここで、「所定エリア」が「特定エリア」の場合には、所定エリア内に存在していないとのエリア判定結果の場合に前記進路判定結果を取得する。
【0059】
以上によれば、前記進路判定結果取得手段による前記進路判定結果の取得は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて行なわれるので、ユーザが進路報知装置を必要としていないと想定される場合には、前記取得動作を行なわないようにすることにより進路報知装置の無駄な電力消費を低減させることができる。
【0060】
また、本発明の進路報知装置は、前記構成に加えて、前記位置情報取得手段は、全地球位置発見システム受信機及び気圧センサによって構成されていることが好ましい。
【0061】
ここで、全地球位置発見システム受信機(GPS受信機)の性質上、高度は、装置から衛星までの距離を求めて、地上から衛星までの距離から減算して求めることになるので、高度算出のための演算部が別途必要となる。
【0062】
これに対し、気圧センサを併用すれば、大気圧と高度とを対応させて予め記録しておけば良いので、上記のような高度算出のための演算部を設けなくて良いので、進路報知装置を小型化することができ、より携帯性の向上を図ることができる。
【0063】
また、本発明の判定結果送信装置は、前記課題を解決するために、情報取得装置(前記進路報知装置に相当する)の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えていることを特徴としている。
【0064】
また、本発明の判定結果送信装置の制御方法は、前記課題を解決するために、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいることを特徴としている。
【0065】
前記構成又は方法によれば、本発明の判定結果送信装置は、情報取得装置(前記進路報知装置に相当する)の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段(情報取得ステップ)を備える(含む)。
【0066】
また、前記構成又は方法によれば、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段(進路判定ステップ)を備える(含む)。
【0067】
また、前記構成又は方法によれば、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段(進路判定結果送信ステップ)とを備えている(含んでいる)。
【0068】
よって、所定の進路に沿う方向であるか否かの判定を自装置で行なうので、情報取得装置(進路報知装置)の携帯性をより高めることができる。
【0069】
なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0070】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0071】
以上より、前記情報取得装置(進路報知装置)と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供できるという効果を奏する。
【0072】
ところで、特許文献4に開示された手持ち式装置では、現在アドレスされている物と判断された物に関する情報を表示する機能はあるものの、進路案内を行なう機能については開示されていない。
【0073】
また、最近は、ほとんどすべてのユーザが携帯機器を携帯していることが多く、不使用時には、ポケットやカバンなどに入れられていることが多い。
【0074】
そうすると、ユーザの利便性を向上させるには、さらに、ユーザが必要に応じて進路案内に加え、ユーザが指示する施設などの物体に関する情報(物体情報)を取得したい場合には、ポケットやカバンなどに入れられている詳細表示可能な表示部を有する携帯機器を取り出し、前記進路報知装置と連携して進路案内処理や施設情報取得処理を行うような総合的な案内システムの開発が好ましい。
【0075】
このような観点に基づき、本発明の判定結果送信装置は、前記構成に加えて、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段と、前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段とを備えていることが好ましい。
【0076】
前記構成によれば、本発明の判定結果送信装置は、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段を備える。
【0077】
よって、前記進路報知装置の前記現在位置におけるユーザの指示方向の先に存在する物体を特定することができる。
【0078】
なお、ここでの「ユーザの指示方向」は、前記指示方位と異なる概念であり、前記装置方向をユーザの指示方向と定義すれば良い。
【0079】
なお、物体を特定する具体的な方法としては、以下で説明する前記物体を含む地図情報と対応づけられた、前記現在位置における指示方向の先に存在する物体の位置座標を特定できる方法であれば、どのような方法及び算出方法を用いても良いが、算出方法の例を挙げれば、以下のような手順による処理方法などが考えられる。但しここでは、3D(3次元)地図情報について考える。また、GPS受信機によって算出される位置座標と地図情報上の位置座標(以下、地図情報上に設定された3D座標系を、単に「座標系」という)との対応関係を予め記録させておく。また、地図情報における施設等の複数の存在領域に対応する前記座標系上の複数の存在領域(以下、「施設領域」という)との対応関係も予め記録されているものとする。
【0080】
まず、GPS受信機によって算出された現在の位置座標に対応する前記座標系上の現在の位置座標を特定する。次に、前記指示方向を前記座標系上で求める。
【0081】
次に、前記座標系上の現在の位置座標を通り当該指示方向に沿う方向の単位ベクトルを方向ベクトルとする直線を前記座標系上の軌跡として求める。
【0082】
次に、前記現在の位置座標を含む所定範囲内に存在する複数の施設領域を特定する(ここでの所定範囲は、ユーザが指示するであろう施設等が含まれているものとして想定される現在の位置座標から所定半径を有する半球領域などが考えられるので、以下ではこの「半球領域」として考える)。
【0083】
次に、この半球領域に含まれる複数の施設領域の中から、前記直線と交わりを持ちかつ現在の位置座標に最も近い施設領域を特定する。
【0084】
このようにして特定された施設領域に対応する施設等をユーザが指示している施設等であると特定する。
【0085】
また、前記構成によれば、前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段を備える。
【0086】
「表示部」としては、例えば、アクティブマトリクス型の液晶表示ディスプレイ、電気泳動型ディスプレイ、ツイストボール型ディスプレイ、微細なプリズムフィルムを用いた反射型ディスプレイ、デジタルミラーデバイス等の光変調素子を用いたディスプレイの他、発光素子として、有機EL発光素子、無機EL発光素子、LED等の発光輝度が可変の素子を用いたディスプレイ、フィールドエミッションディスプレイ(FED)、プラズマディスプレイなどが例示できる。
【0087】
それゆえ、必要に応じて、ユーザが指示する方向の先に存在する物体に関する物体情報を、現実の物体を指示するという直感的な操作によって取得することができる。
【0088】
以上より、前記進路報知装置と連携し、詳細表示可能な表示部を備え、進路案内処理や情報取得処理を行うための各種案内情報を表示する判定結果送信装置及びその制御方法などを提供することができる。
【0089】
なお、本明細書において「案内」とは、前記進路報知装置による報知の他、表示部に表示された地図上に進路案内情報を表示して進路案内処理を行なう場合と、前記指示方向の先に存在する物体(例えば、施設など)に関する物体情報を表示して情報取得処理を行なう場合との両方を含む概念であるものとする。
【0090】
また、「案内情報」には、進路案内のための進路案内情報や、施設等に関する情報を取得して施設等の案内を行なうための施設関係情報(物体情報)などが含まれる概念であるものとする。
【0091】
また、本発明の判定結果送信装置は、前記構成に加えて、前記進路判定結果送信手段は、前記表示部への表示が可能となっている場合には、前記進路判定結果を送信しないことが好ましい。
【0092】
前記表示部への表示が可能となっている場合、進路案内は、判定結果送信装置の表示部への案内情報の表示によって行なえば良いので、前記進路報知装置を動作させなくても良く、このようにして前記進路報知装置の消費電力を節約することができる。
【0093】
なお、判定結果送信装置の案内情報に表示による進路案内と共に、前記進路報知装置による進路案内を併用する構成としても良い。この場合、前記進路報知装置の消費電力を節約できないが、ユーザは適宜、判定結果送信装置の案内情報に表示による進路案内と、前記進路報知装置による進路案内とを選択して利用できるので、ユーザの利便性が向上する。
【0094】
また、「表示が可能となっている」とは、進路報知装置と判定結果送信装置との通信状態が良好であり接続が確立されており、かつ表示部の電源が入っていることを意味する。逆に「表示が可能となっていない」場合は、進路報知装置と判定結果送信装置との通信状態が不良で接続が確立できないか、若しくは表示部の電源が入っていない場合などを意味する。
【0095】
また、本発明の判定結果送信装置は、前記構成に加えて、自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えており、前記表示制御手段は、前記姿勢判定手段によって前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示することが好ましい。
【0096】
前記構成によれば、自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えている。
【0097】
自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なうことができる。
【0098】
なお、姿勢判定手段の判定方法としては、前記姿勢情報取得手段と同様の構成を利用して自装置の姿勢情報を取得し、その姿勢情報に基づいて自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なえば良い。
【0099】
前記姿勢情報取得手段と同様の構成の例としては、3軸センサや6軸センサなどが例示できる。
【0100】
また、6軸センサは、加速度センサと地磁気センサとを組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0101】
また、前記構成によれば、前記表示制御手段は、前記姿勢判定手段によって前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示する。
【0102】
よって、判定結果送信装置が、前記案内情報の表示をユーザが視認できない姿勢になっている場合には、前記案内情報の表示処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0103】
なお、本発明の判定結果送信装置は、前記構成に加えて、前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0104】
前記構成によれば、前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定する。
【0105】
よって、表示部がユーザ視認できる向きとなっている場合のみ前記案内情報を表示するので、表示部がユーザ視認できる向きとなっていないときに無駄な処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0106】
また、本発明の判定結果送信装置は、前記構成に加えて、前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0107】
前記構成によれば、前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定する。
【0108】
よって、表示部の前記案内情報の表示の向きがユーザ視認に適した向きとなっている場合のみ前記案内情報を表示するので、表示部の表示がユーザ視認に適した向きとなっていないときに無駄な処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0109】
なお、表示部がの表示の向きがユーザ視認に適した向きとなっているとは、例えば、表示部の表示が上下左右について適切な向きとなっているという意義である。
【0110】
なお、本発明の判定結果送信装置は、前記構成に加えて、水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段と、前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することが好ましい。
【0111】
前記構成によれば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段を備えている。
【0112】
また、前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示する。
【0113】
よって前記案内情報に、前記物体情報に対応する物体を含む地図情報を含めることができる。したがって、表示部に地図情報を表示することで、進路案内を行なうことができる。
【0114】
よって、例えば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内の場合に、前記地図情報を表示し、所定の俯角の範囲外の場合に、前記物体情報を表示することができるので、進路報知装置の姿勢によって、判定結果送信装置の表示部の表示を前記物体情報と前記所定の地図情報とに切り替えることができ、ユーザの利便性が向上する。
【0115】
なお、本発明の指示方向案内システムは、前記構成に加えて、前記進路報知装置を前記情報取得装置として含むと共に、前記判定結果送信装置とを含んでいることが好ましい。
【0116】
前記構成によれば、前記進路報知装置(情報取得装置)と、前記判定結果送信装置とを連携させて動作させることができる指示方向案内システムを提供することができる。
【0117】
なお、前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムにおける各手段、各機能、各ステップ及び各処理のいずれかは、コンピュータによって実現してもよく、この場合には、コンピュータを各手段として動作させ、コンピュータに各機能を実現させ、若しくはコンピュータに各ステップ及び各処理を実行させることにより前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムをコンピュータにて実現させる前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムの制御プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【0118】
以上より、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供することができる。
【0119】
また、前記進路報知装置と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供することができる。
【発明の効果】
【0120】
本発明の進路報知装置は、以上のように、筐体の位置を示す位置情報を取得する位置情報取得手段と、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えているものである。
【0121】
また、本発明の進路報知装置の制御方法は、以上のように、筐体の位置を示す位置情報を取得する位置情報取得ステップと、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいる方法である。
【0122】
また、本発明の判定結果送信装置は、以上のように、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えているものである。
【0123】
また、本発明の判定結果送信装置の制御方法は、以上のように、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいる方法である。
【0124】
それゆえ、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた進路報知装置、その制御方法などを提供できるという効果を奏する。
【0125】
また、前記進路報知装置と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供できるという効果を奏する。
【発明を実施するための最良の形態】
【0126】
本発明の一実施形態について図1〜図9に基づいて説明すれば、以下の通りである。
【0127】
〔1.指示方向案内システムの構成の概要〕
まず、図1に基づき、本発明の一実施形態である指示方向案内システム1の構成について説明する。
【0128】
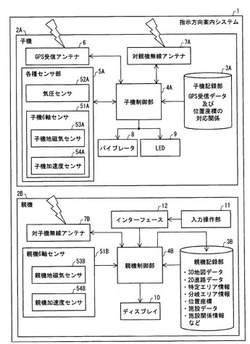
図1は、指示方向案内システム1の構成を示すブロック図である。
【0129】
図1に示すように指示方向案内システム1は、子機(進路報知装置、情報取得装置)2A及び親機(判定結果送信装置)2Bとを含むシステムである。
【0130】
これにより、子機2Aと、親機2Bとを連携させて動作させることができる指示方向案内システム1を提供することができる。
【0131】
子機2Aは、筐体の位置を示す位置情報及び筐体の姿勢を示す姿勢情報を取得して親機2Bに送信するものである。
【0132】
また、親機2Bは、前記位置情報及び姿勢情報を受信(取得)して、現在位置における指示方位が、所定の進路に沿っているか否かの判定を行いその進路判定結果を子機2Aに送信するものである。
【0133】
また、子機2Aは、親機2Bから前記進路判定結果を受信(取得)してその進路判定結果をユーザに報知するものである。
【0134】
以上の構成によれば、ユーザが進路判定結果の報知を受け、その報知が、指示方位が所定の進路に沿うものを知らせるものであれば、ユーザは、所望の進路に沿って移動していることを直感的に理解することができる。よって、子機2A及び親機2Bを通信によって連携させた指示方向案内システム1を提供することができる。なお、子機2A及び親機2B(指示方向案内システム1)の構成及び動作の詳細については、以下で説明する。
【0135】
〔2.子機2Aの構成〕
次に、図1、図2、図5及び図6に基づき、本発明の一実施形態である子機2Aの構成について説明する。
【0136】
なお、〔2.子機2Aの構成〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0137】
図1に示すように、子機2Aは、子機記録部3A、子機制御部4A、各種センサ部(位置情報取得手段、姿勢情報取得手段)5A、GPS受信アンテナ(位置情報取得手段、全地球位置発見システム受信機)6、対親機無線アンテナ(情報送信手段、進路判定結果取得手段)7、バイブレータ(振動素子、報知手段)8及びLED(発光素子、報知手段)9を備えるものである。
【0138】
子機記録部3Aは、ROM(read only memory)又はRAM(random access memory)によって構成することができ、GPS受信機の受信データと経度、緯度、及び高度(位置座標)との対応関係を示すテーブルデータ(不図示)などが予め記録されている。
【0139】
子機制御部4Aは、子機記録部3A、各種センサ部5A、GPS受信アンテナ6、バイブレータ8及びLED9とデータや指令信号などのやり取りを行なって子機2Aの各構成要素の動作を制御するものである。
【0140】
各種センサ部5Aは、子機6軸センサ(姿勢情報取得手段)51A及び気圧センサ(気圧センサ、位置情報取得手段)52Aによって構成されるものである。
【0141】
また、子機6軸センサ(姿勢情報取得手段)51Aは、筐体の姿勢を示す姿勢情報を取得するものであり、子機地磁気センサ(地磁気センサ、姿勢情報取得手段)53A及び子機加速度センサ(加速度センサ、姿勢情報取得手段)54Aによって構成されている。
【0142】
姿勢情報取得機能を備えるものとしては、特に、子機6軸センサ(姿勢情報取得手段)51Aが好ましい。
【0143】
このように子機6軸センサ51Aを搭載することにより、子機2Aの筐体の姿勢の変化に精度良く追随して姿勢情報を取得することが可能となる。
【0144】
また、子機6軸センサ51Aは、本実施形態のように、子機加速度センサ54Aと子機地磁気センサ53Aとを組合せた構成としても良いが、単独で6軸センサとなり得る素子であっても良い。
【0145】
姿勢情報を取得する機能を備えるものとしては、性能を別とすれば、筐体の傾斜状態を検出する傾斜センサ機能、筐体の絶対的な方位(東西南北)を検出する方位センサ機能、筐体の移動(移動方向及び移動量)を検出する移動センサ機能を有するセンサのどれか1つを設ければ良い。
【0146】
このようなセンサ機能を有するものの例としては、例えば、加速度センサ、地磁気センサ及び傾斜角センサのいずれか1つか、これらのセンサを組合せた3軸センサ及び6軸センサなども例示できる。
【0147】
GPS受信アンテナ6は、複数の衛星からの電波を受信して筐体の現在地を示す経度、緯度および高度といった位置情報を取得するためのアンテナである。
【0148】
対親機無線アンテナ7Aは、親機2Bと通信を行なうためのアンテナである。
【0149】
バイブレータ8は、以下で説明する進路判定結果に基づいて振動させたりする(報知する)ためのものである。
【0150】
LED9は、進路判定結果に基づいて発光させたりする(報知する)ものである。
【0151】
このように、報知機能を有するものの例としては、LEDなどのユーザが進路を直感的に理解できる発光素子による発光や、バイブレータなどの振動素子による振動が利用できる。
【0152】
例えば、現在位置における指示方位が所定の進路に沿っている場合にLED(バイブレータ)が発光(振動)している状態としたり、逆に発光(振動)していない状態としたりすることが考えられる。ただし、子機2Aの消費電力低減の観点からは、LED(バイブレータ)が発光(振動)している状態を現在位置における指示方位が所定の進路に沿っている場合とすることが好ましい。
【0153】
なお、発光素子としては、LEDの他、有機EL発光素子、無機EL発光素子等が例示できる。
【0154】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なうバイブレータ8若しくはLED9を備える構成とすれば、子機2Aに表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0155】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0156】
次に、図2に基づき、子機制御部4Aの構成の詳細について説明する。図2は、指示方向案内システム1を構成する子機2Aにおける子機制御部4Aの構成を示すブロック図である。
【0157】
図2に示すように、子機制御部4Aは、対親機通信制御部(情報送信手段、進路判定結果取得手段)41A、子機出力制御部(報知手段)42A、子機センサ制御部(位置情報取得手段、姿勢情報取得手段)43A、位置座標算出部(位置情報取得手段)44A及びGPS受信制御部(全地球位置発見システム受信機、位置情報取得手段)45Aから構成されている。
【0158】
対親機通信制御部41Aは、親機2Bとの通信を制御するものである。本実施形態の指示方向案内システム1では、子機2Aが対親機通信制御部41Aを介して各種センサ部5A及びGPS受信アンテナ6から取得したアナログ信号を親機2Bに送信し、親機2Bでアナログ信号のデジタル信号化や、情報の演算及び加工を行なって以下で説明する進路判定結果、角度判定結果及びエリア判定結果などを出力し、角度判定結果及びエリア判定結果に基づいて、進路判定結果を子機2Aに送信する構成としている。
【0159】
よって、本実施形態では、子機2Aは、進路判定結果を親機2Bから受けて、バイブレータ8やLED9の動作の制御を行なう。このようにすれば、子機2Aの携帯性をより高めることができる。
【0160】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0161】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。
【0162】
また、対親機通信制御部(進路判定結果取得手段)41A前記は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することが好ましい。
【0163】
例えば、以下で説明する姿勢情報に基づいて決定された装置方向をペン先(以下で説明する長手方向に相当)とするペン型の子機2Aの場合を考える。
【0164】
なお、装置方向及び長手方向などの詳細については、以下で説明する。
【0165】
この場合、ユーザは、子機2Aを使用しない場合には、胸のポケットなどに入れているものと考えられる。
【0166】
そこで、対親機通信制御部41Aは、ペン先と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得するように構成する。
【0167】
例えば、ペン先が上向きであれば、ペン先と鉛直方向とのなす角が所定の角度範囲(例えば、およそ30度以外の角度)内となったときだけ前記取得動作を行なうようにする。
【0168】
以上の構成によれば、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が所定の角度範囲外であって、ユーザが子機2Aを使用していないと想定される場合には、対親機通信制御部41Aが進路判定結果の取得動作を行なわないようにすることにより子機2Aの無駄な電力消費を低減させることができる。
【0169】
ここで、図5に基づいて、ここでの所定の角度範囲について説明する図5は、親機2Bの分岐エリア外における動作を説明するための概要図である。
【0170】
図5では、角度αが、前記所定の角度範囲として設定している例である。なお、角度αは、子機2Aを使用しない場合の角度範囲として約30度以内の角度とすることが好ましい。これより、大きい角度範囲に設定すると、子機2Aの進路判定結果の報知による進路案内処理等に支障をきたすおそれがある。
【0171】
また、対親機通信制御部41Aは、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することが好ましい。
【0172】
また、子機2Aの子機出力制御部42Aが取得する前記エリア判定結果は、以下で説明する親機2Bの位置座標及び地図データ照合部451Bが前記現在位置と所定の地図情報とを照合することによって得られた結果であることが好ましい。
【0173】
ここで、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かについては、例えば、前記位置情報に基づいて決定された位置と所定の地図情報とを照合することによって判断するようにすれば良い。
【0174】
ここで、「所定エリア」の例としては、「分岐エリア」や「特定エリア」などが例示できる。
【0175】
ここで、図6の基づいて説明すれば、例えば、「分岐エリア」とは、例えば、図6に示す円形で囲まれた領域である円形領域となる場合が、考えられる。
【0176】
図6は、指示方向案内システム1に関し、分岐エリアを説明するための概要図である。
すなわち、地図情報における道路が複数交差した交差の中心を分岐点とすると、当該分岐点を含む所定範囲のことである。
【0177】
図6の例では、座標1が分岐エリア内であり、座標2の位置が分岐エリア外である。
【0178】
なお、「所定エリア」が「分岐エリア」の場合には、決定された位置が、所定エリア内に存在しているとのエリア判定結果の場合に前記進路判定結果を取得する。
【0179】
また、「特定エリア」とは、ユーザが進路案内処理を必要としないエリアとして予め定めたエリアのことである。
【0180】
「特定エリア」の例としては、港・駅・空港・建物内など進路案内が不要な施設等のエリアが例示できる。
【0181】
たとえば、図6の例で説明すれば、A店内若しくはB店内の領域が、特定エリアとなる。
【0182】
ここで、「所定エリア」が「特定エリア」の場合には、所定エリア内に存在していないとのエリア判定結果の場合に前記進路判定結果を取得する。
【0183】
以上によれば、対親機通信制御部41Aによる前記進路判定結果の取得は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて行なわれるので、ユーザが子機2Aを必要としていないと想定される場合には、対親機通信制御部41Aの取得動作(受信動作)を行なわないようにすることにより子機2Aの無駄な電力消費を低減させることができる。
【0184】
なお、子機2Aの子機出力制御部42Aが取得する前記進路判定結果は、以下で説明する親機2Bの子機姿勢及び進路照合部453Bが、前記指示方向と所定の進路を示す進路情報とを照合することによって得られた結果であることが好ましい。
【0185】
なお、進路判定結果を導出するための具体例については、例えば、前記現在位置における指示方位と所定の進路を示す進路情報とを照合することによって判断することが考えられる。
【0186】
例えば、前記現在位置における指示方位と、所定の進路を示す進路情報との照合の例としては、前記現在位置における指示方位に沿う方向の単位ベクトルの成分と、所定の進路に沿う方向の単位ベクトルの成分とを算出し、これらの単位ベクトルのなす角を算出して、この角と、所定の進路に沿う方向であるとして予め定められた角度範囲とを照合する方法をなどが例示できる。なお、所定の進路に沿う単位ベクトルの成分は、所定の進路が設定された際に、進路毎に予め算出して記憶させておくことが処理の迅速の観点から好ましい。
【0187】
ここで、ユーザの指示方位と、子機2Aの筐体の姿勢との関係について説明する。
【0188】
以下では、子機2Aの筐体自体の方向を装置方向と呼び、ユーザの指示方位と区別する。
【0189】
まず、子機2Aの筐体の姿勢に基づく装置方向が定義可能な筐体の例としては、図4に示すように、長手方向と短手方向とを判別できる形状で構成された筐体などが考えられる。
【0190】
ここで、「長手方向と短手方向とをユーザが判別できる形状で構成された筐体」の例としては、子機2Aの筐体が、図4に示すような棒状体の他、筒状態、直方体、楕円体その他の子機2Aの筐体を特徴づける径に長手方向と短手方向との2方向の径が存在すると認識できる形状で構成されている筐体が例示できる。
【0191】
例えば、図4の例では、紙面に向かって上下方向が、長手方向であり、左右方向が短手方向ということになる。そして、子機2Aの筐体の長手方向を装置方向と定義する。
【0192】
そうすると、ユーザの指示方位を子機2Aの筐体の長手方向の水平方向への射影とし、子機2Aの筐体の姿勢情報との関係を予め求めておけば、子機2Aの筐体の姿勢情報から子機2Aの筐体の長手方向が求まり、この長手方向から求まる水平方向への射影がユーザの指示方位であると定義すれば良い。
【0193】
子機出力制御部42Aは、各種センサ部5Aが得た位置情報及び姿勢情報に基づく、筐体の現在位置における指示方位が所定の進路に沿う方向であるか否かの進路判定結果を親機2Bから取得すると共に、取得した進路判定結果をユーザに報知するため、バイブレータ8を振動させたり又はLED9を発光させる制御を行なうものである。
【0194】
これにより、子機出力制御部42Aが、バイブレータ8を振動させたり又はLED9を発光させることによって進路判定結果を報知するので、直感的に進路に沿っているか否かが理解できるので、子機2Aに表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0195】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なうバイブレータ8、LED9、及びこれらを制御する子機出力制御部42Aを備える構成とすれば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0196】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0197】
なお、このような進路判定結果の判定主体は、子機2A内にあっても良いし、以下で説明する親機2Bのように子機2Aと連携可能な別の端末装置や電子機器等の内部にあっても良い。
【0198】
例えば、子機2Aと連携可能な別の端末装置や電子機器等の内部にある場合、例えば、以下で説明する親機2Bにおける前記判定主体としての子機姿勢及び進路照合部(進路判定手段)453Bのように親機2Bの内部にある場合、子機2Aは、親機2Bへ前記位置情報及び前記姿勢情報を送信する対親機通信制御部(情報送信手段)41Aを備える構成とする。
【0199】
これにより、子機2Aと連携可能な別の端末装置や電子機器等に以下で説明する進路照合部(進路判定手段)453Bなどによる判定処理を行なわせることができるため、子機2Aの携帯性をより高めることができる。
【0200】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0201】
但し、IrDA及びIrSSのような赤外線無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0202】
子機センサ制御部43Aは、各種センサ部5Aの子機6軸センサ51A及び子機加速度センサ54Aを制御して筐体の姿勢情報を取得するものである。
【0203】
位置座標算出部44Aは、GPS受信制御部45Aが取得したアナログ信号から、経度、緯度、高度を算出し、デジタル情報に変換して対親機通信制御部41Aに送信するものである。
【0204】
GPS受信制御部45Aは、GPS受信アンテナ6を介して複数の衛星からの電波をアナログ信号として受信させるものである。
【0205】
なお、本実施形態の子機2Aのように位置情報取得手段は、筐体の位置を示す位置情報を取得する全地球位置発見システム受信機(GPS受信機)及び気圧センサ52Aによって構成されていることが好ましい。
【0206】
ここで、全地球位置発見システム受信機(GPS受信機)の性質上、高度は、装置から衛星までの距離を求めて、地上から衛星までの距離から減算して求めることになるので、高度算出のための演算部が別途必要となる。
【0207】
これに対し、気圧センサ52Aを併用すれば、大気圧と高度とを対応させて予め記録しておけば良いので、上記のような高度算出のための演算部を設けなくて良いので、子機2Aを小型化することができ、より携帯性の向上を図ることができる。
【0208】
この他、位置情報取得機能を持つものの例としては、GPS受信機(global positioning system)、差分情報を用いて補正したDGPS受信機(差動GPS受信機)、及びフェムト通信などの基地局からの情報などにより子機2Aの筐体の絶対位置が特定できればどのようなものを用いても良いが、携帯性向上の観点からは、小型の素子であることが好ましい。
【0209】
次に、図4に基づき子機2Aの一構成例を示す。
【0210】
図4に示すように子機2Aは、上述した長手方向と短手方向とをユーザが判別できる形状で構成された筐体で構成されている。
【0211】
また、上述した各構成要素の配置は、紙面の上からLED9、GPS受信アンテナ6、GPS受信制御部45A、子機制御部4A、子機地磁気センサ53A、子機加速度センサ54Aが配置される。
【0212】
以上に拠れば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0213】
〔3.親機2Bの構成〕
次に、図1、図3、図5、図7及び図8に基づき、本発明の一実施形態である子機2Aの構成について説明する。なお、〔3.親機2Bの構成〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕及び〔2.子機2Aの構成〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕及び〔2.子機2Aの構成〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0214】
図1に示すように、親機2Bは、親機記録部3B、親機制御部4B、対子機無線アンテナ(情報取得手段、進路判定結果送信手段)7B、ディスプレイ(表示部)10、入力操作部11、インターフェース12、及び親機6軸センサ51Bから構成されている。
【0215】
親機記録部3Bは、ROM(read only memory)又はRAM(random access memory)によって構成することができ、3D(Dimension)地図データ(地図情報)、2D進路データ(所定の進路)、特定エリア情報、分岐エリア情報、(3D地図データ上の)位置座標、施設関係(物体情報)などが予め記録されている。
【0216】
親機制御部4Bは、子機記録部3A、対親機無線アンテナ7A、ディスプレイ10、入力操作部11、インターフェース12、親機6軸センサ51Bと各種データや指令信号などのやり取りをしてこれらの構成要素の制御を行なうものである。
【0217】
対子機無線アンテナ7Bは、子機2Aと通信を行なうためのアンテナである。なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0218】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0219】
ディスプレイ10は、案内情報などの各種情報を表示するものであり、主として、後述する子機姿勢及び施設座標照合部(指示物特定手段)452Bによって特定された施設等に関する施設関係情報(物体情報)を表示するものである。
【0220】
なお、「案内情報」には、進路案内のための進路案内情報や、以下で説明する施設に関する情報を取得して施設等の案内を行なうための施設関係情報(物体情報)などが含まれる概念である。
【0221】
また、本明細書において「案内」とは、上記の子機2Aによる進路判定結果の報知の他、ディスプレイ10に表示された地図上に進路案内情報を表示して進路案内処理を行なう場合と、後述するように、前記指示方向の先に存在する物体(例えば、施設など)に関する物体情報を表示して情報取得処理を行なう場合との両方を含む概念であるものとする。
【0222】
また、ディスプレイ10としては、例えば、アクティブマトリクス型の液晶表示ディスプレイ、電気泳動型ディスプレイ、ツイストボール型ディスプレイ、微細なプリズムフィルムを用いた反射型ディスプレイ、デジタルミラーデバイス等の光変調素子を用いたディスプレイの他、発光素子として、有機EL発光素子、無機EL発光素子、LED等の発光輝度が可変の素子を用いたディスプレイ、フィールドエミッションディスプレイ(FED)、プラズマディスプレイなどが例示できる。
【0223】
入力操作部11は、ユーザの意思を入力信号としてインターフェース12を介して親機制御部4Bに伝達するためのものである。
【0224】
なお、入力操作部11は、本実施形態のように子機2Aの指示方向により進路案内情報と施設関係情報とを切り替える「自動処理」と、ユーザが手動で切り替える「手動処理」とが選択できるような「処理切り替え命令」などが入力できるように構成しても良い。
【0225】
この場合は、ユーザの利便性が向上するとともに指示方向案内システム1の電力消費を低減することが可能となる。
【0226】
インターフェース12は、入力操作部11からのアナログの入力信号をデジタル信号に変換して親機制御部4Bに送信するものである。
【0227】
親機6軸センサ51Bは、親機2Bの姿勢を示す姿勢情報を取得するものであり、本実施形態では、親機地磁気センサ53B及び親機加速度センサ54Bから構成されている。
【0228】
なお、親機2Bの姿勢情報を取得する機能を備えるものとしては、3軸センサや6軸センサなどが例示できる。
【0229】
また、親機6軸センサ51Bは、親機地磁気センサ53B及び親機加速度センサ54を組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0230】
なお、親機6軸センサ51Bとしては、6軸センサの他、3軸センサやなどが例示できる。
【0231】
また、親機6軸センサ51Bは、本実施形態のように、親機地磁気センサ53B及び親機加速度センサ54とを組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0232】
次に、図3に基づき、親機2Bの親機制御部4Bの構成の詳細について説明する。
【0233】
図3は、指示方向案内システム1を構成する親機2Bにおける親機制御部4Bの構成を示すブロック図である。
【0234】
図3に示すように、親機制御部4Bは、対子機通信制御部(情報取得手段、進路判定結果送信手段)41B、親機出力制御部(表示制御手段)42B、親機センサ制御部43B、データ算出部44B、データ照合部45B、記録制御部46B及び特定エリアor分岐エリア判定部(俯角判定手段)47Bからなる構成である。
【0235】
対子機通信制御部41Bは、対子機無線アンテナ7Bを介して子機2Aとの通信を制御するものである。主として、以下で説明するように子機姿勢及び進路照合部(進路判定手段)453Bにより出力される進路判定結果を送信する。
【0236】
なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0237】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0238】
対子機通信制御部41Bは、ディスプレイ10への表示が可能となっている場合には、前記進路判定結果を送信しないことが好ましい。
【0239】
ディスプレイ10への表示が可能となっている場合、進路案内は、親機2Bのディスプレイ10への案内情報の表示によって行なえば良いので、子機2Aを動作させなくても良く、このようにして子機2Aの消費電力を節約することができる。
【0240】
なお、親機2Bの案内情報に表示による進路案内と共に、子機2Aによる進路案内を併用する構成としても良い。この場合、子機2Aの消費電力を節約できないが、ユーザは適宜、親機2Bの案内情報に表示による進路案内と、子機2Aによる進路案内とを選択して利用できるので、ユーザの利便性が向上する。
【0241】
また、「表示が可能となっている」とは、子機2Aと親機2Bとの通信状態が良好であり接続が確立されており、かつディスプレイ10の電源が入っていることを意味する。逆に「表示が可能となっていない」場合は、子機2Aと親機2Bとの通信状態が不良で接続が確立できないか、若しくはディスプレイ10の電源が入っていない場合などを意味する。
【0242】
親機出力制御部42Bは、以下で説明する子機姿勢及び施設座標照合部(指示物特定手段)452Bによって特定された物体に関する物体情報を取得してディスプレイ10に表示する制御を行なうものである。
【0243】
ところで、特許文献4に開示された手持ち式装置では、現在アドレスされている物と判断された物に関する情報を表示する機能はあるものの、進路案内を行なう機能については開示されていない。
【0244】
また、最近は、ほとんどすべてのユーザが携帯機器を携帯していることが多く、不使用時には、ポケットやカバンなどに入れられていることが多い。
【0245】
そうすると、ユーザの利便性を向上させるには、さらに、ユーザが必要に応じて進路案内に加え、ユーザが指示する施設などの物体に関する情報を取得したい場合には、ポケットやカバンなどに入れられている詳細表示可能な表示部を有する携帯機器を取り出し、前記進路報知装置と連携して進路案内処理や施設情報取得処理を行うような総合的な案内システムの開発が好ましい。
【0246】
このような観点に基づき、親機2Bは、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する子機姿勢及び施設座標照合部452Bと、特定された物体に関する物体情報を取得してディスプレイ10に表示する親機出力制御部42Bとを備える構成にしている。
【0247】
親機センサ制御部43Bは、親機6軸センサ51Bの動作の制御を行なって親機2Bの姿勢を示す姿勢情報を親機6軸センサ51Bに取得させるものである。
【0248】
データ算出部44Bは、各種データを算出するものであり、親機姿勢算出部(姿勢判定手段)441B及び子機姿勢算出部(角度判定手段)442Bから構成される。
【0249】
親機姿勢算出部441Bは、親機センサ制御部43Bから親機2Bの姿勢を示す姿勢情報に基づいて親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であるか否かの判定を行なうものである。なお、ディスプレイ10は、親機姿勢算出部441Bで親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示する。
【0250】
次に、図8に基づき、親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であるか否かを判定する具体例について説明する。
【0251】
図8は、指示方向案内システム1の動作を説明するための概要図である。
【0252】
親機姿勢算出部441Bは、鉛直方向とディスプレイ10における表示面の法線方向とのなす角(図8の角度β)が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0253】
角度βは、ユーザの利便性を考えれば、約30度から90度までの角度であることが好ましい。
【0254】
これにより、ディスプレイ10がユーザ視認できる向きとなっている場合のみ前記案内情報を表示するので、ディスプレイ10がユーザ視認できる向きとなっていないときに無駄な処理を行なわないので、親機2Bの消費電力を節約することができる。
【0255】
一方、親機姿勢算出部441Bは、水平方向とディスプレイ10における表示の左右方向とのなす角(図8の角度θ)が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0256】
これにより、ディスプレイ10の前記案内情報の表示の向きがユーザ視認に適した向きとなっている場合のみ前記案内情報を表示するので、ディスプレイ10の表示がユーザ視認に適した向きとなっていないときに無駄な処理を行なわないので、親機2Bの消費電力を節約することができる。
【0257】
なお、ディスプレイ10の表示の向きがユーザ視認に適した向きとなっているとは、例えば、ディスプレイ10の表示が上下左右について適切な向きとなっているという意義である。
【0258】
以上より、親機2Bの姿勢が、ディスプレイ10の表示をユーザが視認できない姿勢になっている場合には、前記案内情報の表示処理を行なわないので、親機2Bの消費電力を節約することができる。
【0259】
子機姿勢算出部442Bは、子機2Aから送信された子機2Aの位置を示す位置情報(経度、緯度、及び高度など)及び子機2Aの姿勢情報に基づき、子機2Aによるユーザの指示方向や、指示方位及び子機2Aの装置方向などを算出する(出力)ものである。
【0260】
なお、子機姿勢算出部442Bは、水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定することが好ましい。
【0261】
また、親機出力制御部42Bは、子機姿勢算出部442Bによって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することが好ましい。
【0262】
これにより、前記案内情報に、前記物体情報に対応する物体を含む地図情報を含めることができる。したがって、ディスプレイ10に地図情報を表示することで、進路案内を行なうことができる。
【0263】
よって、例えば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内の場合に、前記地図情報を表示し、所定の俯角の範囲外の場合に、前記物体情報を表示することができるので、子機2Aの姿勢によって、親機2Bのディスプレイ10の表示を前記物体情報と前記所定の地図情報とに切り替えることができ、ユーザの利便性が向上する。
【0264】
ここで、図5に基づき、ここでの所定の俯角の範囲内について説明する。図5では、角度δが示されているが、所定の俯角の範囲内は、この場合、180度―角度δに設定している。角度δは、約90度の角度を示している。なお、角度δは、上記前記物体情報と前記所定の地図情報との切り替えが適切に行なえるように設定すれば良い。
【0265】
次に、データ照合部45Bは、子機2Aから取得(受信)した子機2Aの位置情報及び姿勢情報、並びに、親機センサ制御部43Bが取得した親機2Bの姿勢情報と、親機記録部3Bに記録された3D(Dimension)地図データ(地図情報)、2D進路データ(所定の進路)、(3D地図データ上の)施設データ(施設等の位置データ)などの各種データと照合を行なうものであり、位置座標及び地図データ照合部(位置情報取得手段)451B、子機姿勢及び施設座標照合部(指示物特定手段)452B、及び子機姿勢及び進路照合部(進路判定手段)453B構成されるものである。
【0266】
位置座標及び地図データ照合部451は、3D(Dimension)地図データ(地図情報)に対応づけられた前記座標系上の位置情報と、子機2Aの位置情報とを照合して、子機2Aの3D地図データ上の位置を特定するものである。
【0267】
子機姿勢及び施設座標照合部452Bは、3D地図データ上の施設等の位置データと、子機2Aの指示方向とを照合して、子機2Aの前記現在位置におけるユーザの指示方向の先に存在する物体を特定するものである。
【0268】
なお、ここでの「ユーザの指示方向」は、前記指示方位と異なる概念であり、前記装置方向をユーザの指示方向と定義すれば良い。
【0269】
なお、物体を特定する具体的な方法としては、前記物体を含む地図情報と対応づけられた、前記現在位置における指示方向の先に存在する物体の位置座標を特定できる方法であれば、どのような方法及び算出方法を用いても良いが、算出方法の例を挙げれば、以下のような手順による処理方法などが考えられる。但しここでは、3D(3次元)地図情報について考える。また、子機2AのGPS受信制御部45Aの受信電波に基づいて位置座標算出部44Aによって算出される経度、緯度、高度(位置座標)と地図情報上の位置座標(以下、地図情報上に設定された3D座標系を、単に「座標系」という)との対応関係を親機記録部3Bに予め記録させておく。また、地図情報における施設等の複数の存在領域に対応する前記座標系上の複数の存在領域(以下、「施設領域」という)との対応関係も予め記録されているものとする(不図示)。
【0270】
まず、位置座標算出部44Aによって算出された現在の位置座標に対応する前記座標系上の現在の位置座標を特定する。次に、前記指示方向を前記座標系上で求める。
【0271】
次に、前記座標系上の現在の位置座標を通り当該指示方向に沿う方向の単位ベクトルを方向ベクトルとする直線を前記座標系上の軌跡として求める。
【0272】
次に、前記現在の位置座標を含む所定範囲内に存在する複数の施設領域を特定する(ここでの所定範囲は、ユーザが指示するであろう施設等が含まれているものとして想定される現在の位置座標から所定半径を有する半球領域などが考えられるので、以下ではこの「半球領域」として考える)。
【0273】
次に、この半球領域に含まれる複数の施設領域の中から、前記直線と交わりを持ちかつ現在の位置座標に最も近い施設領域を特定する。
【0274】
このようにして特定された施設領域に対応する施設等をユーザが指示している施設等であると特定する。
【0275】
子機姿勢及び進路照合部453Bは、子機2Aの前記現在位置における指示方位と、2D進路データとを照合して、前記現在位置における指示方位が、前記所定の進路に沿っているか否かを判定して、進路判定結果を出力するものである。
【0276】
記録制御部46Bは、子機2Aから所得した子機2Aの位置情報及び姿勢情報を記録したり、データ算出部44B及びデータ照合部45Bから出力される各種データを親機記録部3Bに一時的に記録させる制御を行なうものである。
【0277】
ここで、図7基づき、進路判定処理の概要について説明する。
【0278】
図7は、指示方向案内システム1に関し、分岐エリアでの動作を説明するための概要図である。
【0279】
図7では、紙面に対して前後、及び左右にまっすぐ伸びた道路が交差して十字路が生じている様子を示している。
【0280】
ユーザのこれまでの進行方向は、「後」から「前」すなわち、白抜きの矢印の示す方向であるものとする。
【0281】
また、ここでの所定の進路は、紙面に向かって右折、すなわち、黒の矢印の示す進路であるものとする。
【0282】
子機2Aが、破線で示されている姿勢をとっている場合には、不正解、すなわち、親機2Bにより指示方位が所定の進路に沿っていないと判定されて、LED9が発光していない様子を示している。
【0283】
一方、子機2Aが、実線で示される姿勢をとっている場合には、正解、すなわち、親機2Bにより、指示方位が所定の進路に沿っていると判定されて、LED9が発光している様子を示している。
【0284】
以上によれば、所定の進路に沿う方向であるか否かの判定を親機2B側で行なうので、子機2Aの携帯性をより高めることができる。
【0285】
以上より、子機2Aと連携し、進路判定処理を行なう親機2Bを提供できるという効果を奏する。
【0286】
それゆえ、必要に応じて、ユーザが指示する方向の先に存在する物体に関する物体情報を、現実の物体を指示するという直感的な操作によって取得することができる。
【0287】
以上より、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた子機2A、子機2Aと連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう親機2B、これらの装置を連携させた指示方向案内システム1などを提供することができる。
【0288】
〔4.指示方向案内システム1の動作〕
次に、図1〜図3及び図9に基づき、指示方向案内システム1の詳細な動作について説明する。
【0289】
なお、〔4.指示方向案内システム1の動作〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕、〔2.子機2Aの構成〕及び〔3.親機2Bの構成〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕、〔2.子機2Aの構成〕及び〔3.親機2Bの構成〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0290】
図9は、指示方向案内システム1の動作を説明するためのフローチャートである。
【0291】
図9のステップS1(以下「ステップ」は、省略する)では、まず、図1及び2に示すように、子機2AのGPS受信制御部45Aが、GPS受信アンテナ6を介して複数の衛星からの電波信号を受信する共に、位置座標算出部44Aに送信する。
【0292】
次に、位置座標算出部44Aは、前記電波信号に基づいて、経度、緯度、及び高度(以下、単に「位置情報」という。)を算出する。
【0293】
また、子機2Aの子機センサ制御部43Aは、各種センサ部5Aの子機6軸センサ51A(子機地磁気センサ53A・子機加速度センサ54A)からの検出結果である姿勢信号を受けてアナログ/デジタル変換を行ないデジタル情報としての姿勢情報を出力する(以下、アナログ/デジタル変換及びデジタル/アナログ変換などの処理については、省略する。)。
【0294】
また、子機2Aの子機センサ制御部43Aは、各種センサ部5Aの気圧センサ52Aにからの検出結果である圧力信号を受信し、デジタル情報としての高度に関する位置情報を出力する。その後S2に進む(なお、以上の動作は、順不同である)。
【0295】
次に、S2では、位置座標算出部44Aが対親機通信制御部41Aに位置情報を送信し、子機センサ制御部43Aは、姿勢情報及び高度に関する位置情報を対親機通信制御部41Aに送信してS3に進む(なお、以上の動作は、順不同である)。
【0296】
次に、S3では、対親機通信制御部41Aが、対親機無線アンテナ7Aを介して、位置情報、姿勢情報及び高度に関する位置情報を親機2Bに送信する。
【0297】
親機2Bの対子機通信制御部41Bは、対子機無線アンテナ7Bを介して、位置情報、姿勢情報及び高度に関する位置情報を受信すると、記録制御部46Bに送信する。記録制御部46Bは、親機記録部3BのRAMに位置情報、高度に関する位置情報(以下、これらを纏めて「位置情報」という)、及び姿勢情報を一時記録させる。
【0298】
次に、親機記録部3Bは、上記の記録が完了すると、データ算出部44Bの子機姿勢算出部442Bに「動作命令」を発する。
【0299】
子機姿勢算出部442Bは、前記「動作命令」を受けると、親機記録部3Bに一時記録された姿勢情報を読み出し、姿勢情報に基づいて、子機2Aの装置方向を算出する。
【0300】
子機姿勢算出部442Bは、子機2Aの装置方向と、鉛直上向き(鉛直方向)とのなす角が、所定の閾値の角度αを超えているか否かを判定し、角度判定結果を得ると共にその角度判定結果を親機記録部3Bに一時記録させる。
【0301】
角度判定結果が、所定の閾値の角度αを超えているとの結果である場合には、「YES」となり、子機2Aの現在位置における指示方向を算出して親機記録部3Bに一時記録させてS4に進む。一方、角度判定結果が、所定の閾値の角度αを超えているとの結果である場合には、「NO」となり親機2B側の動作が終了するためS1に戻る。
【0302】
次に、S4では、子機姿勢算出部442Bが親機出力制御部42Bにディスプレイ10の電源が入っているか否かの「問い合わせ信号」を発する。
【0303】
親機出力制御部42Bは、子機姿勢算出部442Bから「問い合わせ信号」を受けると、ディスプレイ10の電源がONの場合には、「ON信号」を発してS5に進む。子機姿勢算出部442Bは、親機出力制御部42Bから「ON信号」を受けて親機センサ制御部43Bに「動作命令」を発してS5に進む。
【0304】
一方、S4で、ディスプレイ10の電源がOFFの場合には、「OFF信号」を発してS10に進む。
【0305】
S5では、親機センサ制御部43Bが、親機6軸センサ51B(親機地磁気センサ53B・親機加速度センサ54B)に「動作命令」を発する。
【0306】
親機6軸センサ51Bは、親機センサ制御部43Bから「動作命令」を受けると、姿勢信号を検出し、親機センサ制御部43Bに送信する。
【0307】
親機センサ制御部43Bは、姿勢信号を姿勢情報に変換して親機姿勢算出部441Bに送信してS6に進む。
【0308】
S6では、親機姿勢算出部441Bは、姿勢情報から親機2Bのディスプレイ10における表示面の法線方向と鉛直方向とのなす角が、所定の角度範囲内(図8の閾値の角度β)か否かを判定し、第1角度判定結果を出力する。
【0309】
また、親機姿勢算出部441Bは、姿勢情報から親機2Bの水平方向とディスプレイ10における表示の左右方向とのなす角が、所定の角度範囲内(図8の角度θ)か否かを判定し、第2角度判定結果を出力する。
【0310】
第1角度判定結果が角度β内であり、かつ第2角度判定結果が角度θ内である場合には、「YES」となり、S7に進む。一方、S6で、第1角度判定結果が角度β内でないか、又は第2角度判定結果が角度θ内でない場合には、「NO」となりS10に進む。
【0311】
S7では、親機姿勢算出部441Bがデータ照合部45Bの位置座標及び地図データ照合部451に「動作命令」を送信する。
【0312】
位置座標及び地図データ照合部451は、「動作命令」を受けると、親機記録部3Bに記録されている子機2Aの位置情報と、3D地図データを照合させて、3D地図データ上の座標系における位置座標(現在位置)を求めて、親機記録部3Bに一時記録させると共に、特定エリアor分岐エリア判定部47Bに「動作命令」を発してS8に進む。
【0313】
S8では、特定エリアor分岐エリア判定部47Bが、親機記録部3Bに一時記録されている子機2Aの現在位置と特定エリア情報とに基づいて、子機2Aの現在位置が特定エリア内か否かを判定して特定エリア判定結果(エリア判定結果)として出力する。
【0314】
特定エリア判定結果が、子機2Aの現在位置が特定エリア内であるとの判定であった場合には、「YES」となり、特定エリアor分岐エリア判定部47Bは、子機姿勢及び施設座標照合部452Bに「動作命令」を発してS9に進む。
【0315】
一方、S8で、特定エリア判定結果が、子機2Aの現在位置が特定エリア内でないとの判定であった場合には、「NO」となり、S14に進む。
【0316】
S9では、子機姿勢及び施設座標照合部452Bが「動作命令」を受けて、親機記録部3Bから子機2Aの現在位置における指示方向の先にある施設を施設データ(施設の座標系上の位置座標)から特定し、施設特定結果として出力し、親機出力制御部42Bに「動作命令」を発する。
【0317】
親機出力制御部42Bは、「動作命令」を受けて親機記録部3Bから、前記施設特定結果に基づいて、特定された施設(物体)に関する施設関係情報(物体情報)を読み出す。
【0318】
親機出力制御部42Bは、ディスプレイ10に施設関係情報を表示させて「END」となる。
【0319】
S14では、特定エリアor分岐エリア判定部47Bが、親機記録部3Bに一時記録されている子機2Aの現在位置と分岐エリア情報とに基づいて、子機2Aの現在位置が分岐エリア内か否かを判定して分岐エリア判定結果(エリア判定結果)として出力する。
【0320】
分岐エリア判定結果が、子機2Aの現在位置が分岐エリア内であるとの判定であった場合には、「YES」となり、S15に進む。
【0321】
一方、S14で、分岐エリア判定結果が、子機2Aの現在位置が分岐エリア内でないとの判定であった場合には、「No」となり、S9に進む。
【0322】
S15では、特定エリアor分岐エリア判定部47Bが、一時記録されている子機2Aの角度判定結果を読み出し、角度判定結果が閾値の角度δの範囲内にあるか否かを判定し、俯角判定結果として出力する。
【0323】
ここで、俯角判定結果が、角度δの範囲内であった場合には、S9に進む。
【0324】
一方、俯角判定結果が、角度δの範囲外であった場合には、S10に進む。
【0325】
S10では、特定エリアor分岐エリア判定部47Bが、子機姿勢及び進路照合部453Bに「動作命令」を発する。
【0326】
子機姿勢及び進路照合部453Bは、「動作命令」を受けて親機記録部3Bから一時記録されている位置情報及び姿勢情報に基づき子機2Aの現在位置における指示方位と、2D進路データ(所定の進路)とを照合して進路判定結果を出力してS11に進む。
【0327】
S11では、進路判定結果が、前記進路に沿っているとの判定結果であった場合には、「YES」となり、子機姿勢及び進路照合部453Bが、「進路判定結果」を対子機通信制御部41Bに送信してS12に進む。
【0328】
一方、進路判定結果が、前記進路に沿っていないの判定結果であった場合には、「NO」となり、子機姿勢及び進路照合部453Bが、動作を終了させてS1に戻る。
【0329】
S12では、対子機通信制御部41Bが、対子機無線アンテナ7Bを介して進路判定結果を子機2Aに送信する。子機2Aの対子機通信制御部41Bは「進路判定結果」を対親機無線アンテナ7Aを介して受信し、それを子機出力制御部42Aに送信する。
【0330】
子機出力制御部42Aは、「進路判定結果」を取得すると、バイブレータ8を振動させるか、LED9を発光(点灯)させて「END」となる。
【0331】
最後に、指示方向案内システム1及び子機2A・親機2Bの各ブロック、特に子機制御部4A・親機制御部4Bは、ハードウェアロジックによって構成してもよいし、次のようにCPUを用いてソフトウェアによって実現してもよい。
【0332】
すなわち、指示方向案内システム1及び子機2A・親機2Bは、各機能を実現する制御プログラムの命令を実行するCPU(central processing unit)、前記プログラムを格納したROM(read only memory)、前記プログラムを展開するRAM(random access memory)、前記プログラムおよび各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。(例えば、図1に示す子機記録部3A・親機記録部3B)
そして、本発明の目的は、上述した機能を実現するソフトウェアである指示方向案内システム1及び子機2A・親機2Bの制御プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、前記指示方向案内システム1及び子機2A・親機2Bに供給し、そのコンピュータ(又はCPUやMPU)が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
【0333】
前記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ系、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやコンパクトディスク−ROM/MO/MD/デジタルビデオデイスク/コンパクトディスク−R等の光ディスクを含むディスク系、ICカード(メモリカードを含む)/光カード等のカード系、あるいはマスクROM/EPROM/EEPROM/フラッシュROM等の半導体メモリ系などを用いることができる。
【0334】
また、指示方向案内システム1及び子機2A・親機2Bを通信ネットワークと接続可能に構成し、前記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークとしては、特に限定されず、例えば、インターネット、イントラネット、エキストラネット、LAN、ISDN、VAN、CATV通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、802.11無線、HDR、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、前記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
【産業上の利用可能性】
【0335】
本発明は、簡易で携帯性の高いナビゲーション機器と、詳細表示可能な表示機器(PDA:Personal Digital Assistant)などとが連携して、進路案内処理や情報取得処理を行うパーソナルナビゲーションデバイス(PND)の分野などに用いることができる。
【図面の簡単な説明】
【0336】
【図1】本発明における指示方向案内システムの実施の一形態を示すブロック図である。
【図2】前記指示方向案内システムを構成する進路報知装置における制御部の構成を示すブロック図である。
【図3】前記指示方向案内システムを構成する判定結果送信装置における制御部の構成を示すブロック図である。
【図4】前記進路報知装置の一構成例を示す断面図である。
【図5】前記進路方向報知装置に関し、分岐エリア外における動作を説明するための概要図である。
【図6】前記指示方向案内システムに関し、分岐エリアを説明するための概要図である。
【図7】前記指示方向案内システムに関し、分岐エリアでの動作を説明するための概要図である。
【図8】前記判定結果送信装置の動作を説明するための概要図である。
【図9】前記指示方向案内システムの動作を説明するためのフローチャートである。
【符号の説明】
【0337】
1 指示方向案内システム
2A 子機(進路報知装置、情報取得装置)
2B 親機(判定結果送信装置)
3A 子機記録部
3B 親機記録部
4A 子機制御部
4B 親機制御部
5A 各種センサ部(位置情報取得手段、姿勢情報取得手段)
6 GPS受信アンテナ(位置情報取得手段、全地球位置発見システム受信機)
7A 対親機無線アンテナ(情報送信手段、進路判定結果取得手段)
7B 対子機無線アンテナ(情報取得手段、進路判定結果送信手段)
8 バイブレータ(振動素子、報知手段)
9 LED(発光素子、報知手段)
10 ディスプレイ(表示部)
11 入力操作部
12 インターフェース
41A 対親機通信制御部(情報送信手段、進路判定結果取得手段)
41B 対子機通信制御部(情報取得手段、進路判定結果送信手段)
42A 子機出力制御部(報知手段)
42B 親機出力制御部(表示制御手段)
43A 子機センサ制御部(位置情報取得手段、姿勢情報取得手段)
43B 親機センサ制御部
44A 位置座標算出部(位置情報取得手段)
44B データ算出部
45A GPS受信制御部(全地球位置発見システム受信機、位置情報取得手段)
45B データ照合部
46B 記録制御部
47B 特定エリアor分岐エリア判定部(俯角判定手段)
51A 子機6軸センサ(姿勢情報取得手段)
51B 親機6軸センサ
52A 気圧センサ(位置情報取得手段)
53A 子機地磁気センサ(地磁気センサ、姿勢情報取得手段)
53B 親機地磁気センサ
54A 子機加速度センサ(加速度センサ、姿勢情報取得手段)
54B 親機加速度センサ
441B 親機姿勢算出部(姿勢判定手段)
442B 子機姿勢算出部(角度判定手段)
451B 位置座標及び地図データ照合部(位置情報取得手段)
452B 子機姿勢及び施設座標照合部(指示物特定手段)
453B 子機姿勢及び進路照合部(進路判定手段)
【技術分野】
【0001】
本発明は、指示方位に基づいて進路を直感的に理解できる進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体に関するものである。
【背景技術】
【0002】
従来、複数の衛星からの電波を受信して自装置の位置を検出可能なGPS(Global Positioning System)受信機などを応用した幾つかの製品が開発されており、例えば、GPS受信機を用いたカーナビゲーションは多くのユーザーに使用されている。GPS受信機を用いることにより自装置の現在位置を示す経度、緯度及び高度といった位置情報を簡単に取得することが可能であり、カーナビゲーションシステムはこの位置情報をシステムに搭載した地図上の進路情報と照合させてドライバーに対し道順を指示できるようにしている。
【0003】
また、近年、GPS受信機を用いたカーナビゲーションシステム以外の個人用のナビゲーションシステムも開発されており、カーナビゲーション以外の分野でもGPS受信機による進路案内が可能になっている。
【0004】
さらに、個人用のナビゲーションシステムとしてGPS受信機内蔵の携帯電話にナビゲーションシステムを搭載した技術も開発されている。
【0005】
一方、GPS受信機のみを搭載した技術では、現在位置を示す経度、緯度及び高度といった位置情報を簡単に取得することはできるが、自装置の装置方向などの検出はできない。
【0006】
このような問題を解決するために、地磁気センサと加速度センサとを組合せた6軸センサを用いた携帯機器が、特許文献1に開示されている。
【0007】
特許文献1に開示された技術によれば、携帯機器の収納方向にかかわらず、正確に位置情報や地磁気に対する向き、携帯機器の所持者の移動方向などが計測できるようになっている。
【0008】
以上のようなGPS受信機や6軸センサなどを利用した従来技術の例として特許文献2には、地図を用いてユーザーを目的地に誘導するのではなく、目的地の方向を指示することによってユーザーを誘導できる方向指示装置が開示されている。
【0009】
さらに、特許文献3には、表示装置本体の体勢及び/又は移動についての状態を検出し、装置本体の体勢、移動などの状況に合致させた状態で表示内容が変化するように構成された表示装置が開示されている。
【0010】
一方、進路案内を目的とする技術ではないが、特許文献4には、アドレスしたい物へ向けて指し示し得る手持ち式装置が、現在アドレスされている物と判断された物に関する情報を、ユーザ・インターフェースに提示する技術が開示されている。
【特許文献1】特開2004− 364197号公報(平成16年12月24日公開)
【特許文献2】特開平10 − 197277号公報(平成10年 7月31日公開)
【特許文献3】特開平 9 − 311625号公報(平成 9年12月 2日公開)
【特許文献4】特表2004− 531791号公報(平成16年10月14日公表)
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、上記従来のカーナビゲーションシステムや、個人用のナビゲーションシステムでは、地図を表示可能な大きさのディスプレイが必要であり、さらに、地図情報を蓄積しておくために記憶容量の大きな外部記憶媒体を搭載する必要がある。従って、これらのナビゲーションシステムを小型化することは難しく携帯性の向上が困難であり、また、価格も高価となってしまうという問題点がある。この点は、特許文献3に開示された表示装置についても同様である。
【0012】
また、特許文献1に開示された6軸センサを用いた携帯機器では、音声や表示によってナビゲーションを行なうシステムなので、ユーザは、音声や表示の内容を理解する必要があり、面倒であるという問題点がある。
【0013】
また、特許文献2に開示された方向指示装置では、指示方向を矢印で表示するため、当該表示のための表示部が必要であり、さらなる携帯性の向上は難しく、また、ユーザは、矢印が示す方向を現実の地上における方位と照らし合わせて理解する必要があり、面倒であるという問題点がある。
【0014】
そうすると、ユーザの利便性を向上させるためには、進路案内処理については表示部が無くとも、指示方位に基づいてユーザが進路を直感的に理解できるような工夫がなされた携帯性の優れた案内装置の開発が好ましい。
【0015】
本発明は、前記従来の問題点に鑑みなされたものであって、その目的は、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0016】
本発明の進路報知装置は、前記課題を解決するために、筐体の位置を示す位置情報を取得する位置情報取得手段と、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えていることを特徴としている。
【0017】
また、本発明の進路報知装置の制御方法は、前記課題を解決するために、筐体の位置を示す位置情報を取得する位置情報取得ステップと、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいることを特徴としている。
【0018】
前記構成又は方法によれば、本発明の進路報知装置又はその制御方法では、筐体の位置を示す位置情報を取得する位置情報取得手段を備える又は位置情報取得ステップを含む。
【0019】
それゆえ、筐体の位置を示す位置情報を取得することができる。なお、位置情報取得手段(位置情報取得ステップにおいて使用されるもの)の例としては、GPS受信機(global positioning system)、差分情報を用いて補正したDGPS受信機(差動GPS受信機)、及びフェムト通信などの基地局からの情報などにより筐体の絶対位置が特定できればどのような手段(ステップ)を用いても良いが、携帯性向上の観点からは、小型の素子である(小型の素子を用いる方法である)ことが好ましい。
【0020】
また、前記構成又は前記方法によれば、筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段を備える又は姿勢情報取得ステップを含む。
【0021】
それゆえ、筐体の姿勢を示す姿勢情報を取得することができる。なお、姿勢情報取得手段(姿勢情報取得ステップにおいて使用されるもの)の例としては、筐体の傾斜状態を検出する傾斜センサ機能、筐体の絶対的な方位(東西南北)を検出する方位センサ機能、筐体の移動(移動方向及び移動量)を検出する移動センサ機能を有する各種センサが例示できる。このような各種センサの例としては、例えば、加速度センサ、地磁気センサ及び傾斜角センサのいずれか1つか、これらのセンサを組合せた3軸又は6軸センサなどが例示できる。
【0022】
なお、前記姿勢情報取得手段を構成するこれらの各種センサの中では、特に、6軸センサが好ましい。
【0023】
このような6軸センサを搭載することにより、進路報知装置の姿勢の変化に精度良く追随して姿勢情報を取得することが可能となる。
【0024】
また、6軸センサは、加速度センサと地磁気センサとを組合せた構成としても良いが、単独で6軸センサとなり得る素子であっても良い。
【0025】
また、前記構成又は前記方法によれば、前記位置情報及び前記姿勢情報に基いて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段(進路判定結果取得ステップ)を備える(含む)。
【0026】
なお、進路判定結果を導出するための具体例については、例えば、前記現在位置における指示方位と所定の進路を示す進路情報とを照合することによって判断することが考えられる。
【0027】
例えば、前記現在位置における指示方位と、所定の進路を示す進路情報との照合の例としては、前記現在位置における指示方位に沿う方向の単位ベクトルの成分と、所定の進路に沿う方向の単位ベクトルの成分とを算出し、これらの単位ベクトルのなす角を算出して、この角と、所定の進路に沿う方向であるとして予め定められた角度範囲とを照合する方法をなどが例示できる。なお、所定の進路に沿う単位ベクトルの成分は、所定の進路が設定された際に、進路毎に予め算出して記憶させておくことが処理の迅速の観点から好ましい。
【0028】
ここで、ユーザの指示方位と、筐体の姿勢との関係について説明する。以下では、筐体自体の方向を装置方向と呼び、ユーザの指示方位と区別する。
【0029】
まず、筐体の姿勢に基づく装置方向が定義可能な筐体の例としては、長手方向と短手方向とを判別できる形状で構成された筐体などが考えられる。
【0030】
また、「長手方向と短手方向とを判別できる形状で構成された筐体」の例としては、筐体が、棒状体、筒状態、直方体、楕円体その他の筐体を特徴づける径に長手方向と短手方向との2方向の径が存在すると認識できる形状で構成されている筐体が例示できる。
【0031】
この場合、例えば、筐体の長手方向を装置方向と定義する。
【0032】
そうすると、ユーザの指示方位を前記筐体の長手方向の水平方向への射影とし、筐体の姿勢情報との関係を予め求めておけば、筐体の姿勢情報から筐体の長手方向が求まり、この長手方向から求まる射影がユーザの指示方位であると定義すれば良い。
【0033】
また、前記構成又は前記方法によれば、前記進路判定結果取得手段が(進路判定結果取得ステップで)取得した前記進路判定結果を報知する報知手段(報知ステップ)を備える(含む)。
【0034】
前記構成又は方法によれば、報知手段が又は報知ステップで、該所定の進路に沿うか否かの進路判定結果を報知するので、直感的に進路に沿っているか否かが理解できる。それゆえ、表示部が無くとも、指示方位に基づいてユーザが進路を直感的に理解できる。
【0035】
なお、前記進路判定結果の判定主体は、本発明の進路報知装置内にあっても良いし、以下で説明する判定結果送信装置のように本発明の進路報知装置と連携可能な別の端末装置や電子機器等の内部にあっても良い。
【0036】
例えば、以下で説明する前記判定主体としての進路判定手段が、本発明の進路報知装置と連携可能な別の端末装置や電子機器等の内部にある場合、例えば、以下で説明する判定結果送信装置の内部にある場合、本発明の進路報知装置は、前記判定結果送信装置へ前記位置情報及び前記姿勢情報を送信する情報送信手段を備える構成とする。
【0037】
前記構成によれば、進路報知装置と連携可能な別の端末装置や電子機器等に以下で説明する進路判定手段などによる判定処理を行なわせることができるため、進路報知装置の携帯性をより高めることができる。
【0038】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0039】
但し、IrDA及びIrSSのような赤外線無線の場合は、進路報知装置と以下で説明する判定結果送信装置との状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0040】
また、本発明の進路報知装置は、前記構成に加えて、前記報知手段は、発光素子によって構成されており、前記進路判定結果に基づいて前記発光素子を発光させても良い。
【0041】
また、本発明の進路報知装置は、前記構成に加えて、前記報知手段は、振動素子によって構成されており、前記進路判定結果に基づいて前記振動素子を振動させても良い。
【0042】
すなわち、報知手段(報知ステップにおいて使用されるもの)の例としては、LED(light-emitting diode)などのユーザが進路を直感的に理解できる発光素子による発光や、バイブレータなどの振動素子による振動が利用できる。
【0043】
例えば、前記現在位置における指示方位が所定の進路に沿っている場合にLED(バイブレータ)が発光(振動)している状態としたり、逆に発光(振動)していない状態としたりすることが考えられる。ただし、進路報知装置の消費電力低減の観点からは、LED(バイブレータ)が発光(振動)している状態を前記現在位置における指示方位が所定の進路に沿っている場合とすることが好ましい。
【0044】
なお、発光素子としては、LEDの他、有機EL発光素子、無機EL発光素子等が例示できる。
【0045】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なう報知手段(報知ステップ)を備える(含む)ように構成すれば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0046】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた進路報知装置及びその制御方法を提供することができる。
【0047】
また、本発明の進路報知装置は、前記構成に加えて、前記進路判定結果取得手段は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することが好ましい。
【0048】
例えば、前記姿勢情報に基づいて決定された装置方向をペン先(前記長手方向に相当)とするペン型の進路報知装置の場合を考える。この場合、ユーザは、当該進路報知装置を使用しない場合には、胸のポケットなどに入れているものと考えられる。
【0049】
そこで、前記進路判定結果取得手段は、ペン先と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得するように構成する。
【0050】
例えば、ペン先が上向きであれば、ペン先と鉛直方向とのなす角が所定の角度範囲(例えば、およそ30度以外の角度)内となったときだけ前記取得動作を行なうようにする。
【0051】
以上の構成によれば、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が所定の角度範囲外であって、ユーザが進路報知装置を使用していないと想定される場合には、進路判定結果の取得動作を行なわないようにすることにより進路報知装置の無駄な電力消費を低減させることができる。
【0052】
なお、本発明の進路報知装置は、前記構成に加えて、前記進路判定結果取得手段は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することが好ましい。
【0053】
ここで、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かについては、例えば、前記位置情報に基づいて決定された位置と所定の地図情報とを照合することによって判断するようにすれば良い。
【0054】
ここで、「所定エリア」の例としては、「分岐エリア」や「特定エリア」などが例示できる。例えば、「分岐エリア」とは、地図情報における道路が複数交差した交差の中心を分岐点とすると、当該分岐点を含む所定範囲のことである。
【0055】
なお、「所定エリア」が「分岐エリア」の場合には、決定された位置が、所定エリア内に存在しているとのエリア判定結果の場合に前記進路判定結果を取得する。
【0056】
また、「特定エリア」とは、ユーザが進路案内処理を必要としないエリアとして予め定めたエリアのことである。
【0057】
「特定エリア」の例としては、港・駅・空港・建物内など進路案内が不要な施設等のエリアが例示できる。
【0058】
ここで、「所定エリア」が「特定エリア」の場合には、所定エリア内に存在していないとのエリア判定結果の場合に前記進路判定結果を取得する。
【0059】
以上によれば、前記進路判定結果取得手段による前記進路判定結果の取得は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて行なわれるので、ユーザが進路報知装置を必要としていないと想定される場合には、前記取得動作を行なわないようにすることにより進路報知装置の無駄な電力消費を低減させることができる。
【0060】
また、本発明の進路報知装置は、前記構成に加えて、前記位置情報取得手段は、全地球位置発見システム受信機及び気圧センサによって構成されていることが好ましい。
【0061】
ここで、全地球位置発見システム受信機(GPS受信機)の性質上、高度は、装置から衛星までの距離を求めて、地上から衛星までの距離から減算して求めることになるので、高度算出のための演算部が別途必要となる。
【0062】
これに対し、気圧センサを併用すれば、大気圧と高度とを対応させて予め記録しておけば良いので、上記のような高度算出のための演算部を設けなくて良いので、進路報知装置を小型化することができ、より携帯性の向上を図ることができる。
【0063】
また、本発明の判定結果送信装置は、前記課題を解決するために、情報取得装置(前記進路報知装置に相当する)の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えていることを特徴としている。
【0064】
また、本発明の判定結果送信装置の制御方法は、前記課題を解決するために、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいることを特徴としている。
【0065】
前記構成又は方法によれば、本発明の判定結果送信装置は、情報取得装置(前記進路報知装置に相当する)の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段(情報取得ステップ)を備える(含む)。
【0066】
また、前記構成又は方法によれば、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段(進路判定ステップ)を備える(含む)。
【0067】
また、前記構成又は方法によれば、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段(進路判定結果送信ステップ)とを備えている(含んでいる)。
【0068】
よって、所定の進路に沿う方向であるか否かの判定を自装置で行なうので、情報取得装置(進路報知装置)の携帯性をより高めることができる。
【0069】
なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0070】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0071】
以上より、前記情報取得装置(進路報知装置)と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供できるという効果を奏する。
【0072】
ところで、特許文献4に開示された手持ち式装置では、現在アドレスされている物と判断された物に関する情報を表示する機能はあるものの、進路案内を行なう機能については開示されていない。
【0073】
また、最近は、ほとんどすべてのユーザが携帯機器を携帯していることが多く、不使用時には、ポケットやカバンなどに入れられていることが多い。
【0074】
そうすると、ユーザの利便性を向上させるには、さらに、ユーザが必要に応じて進路案内に加え、ユーザが指示する施設などの物体に関する情報(物体情報)を取得したい場合には、ポケットやカバンなどに入れられている詳細表示可能な表示部を有する携帯機器を取り出し、前記進路報知装置と連携して進路案内処理や施設情報取得処理を行うような総合的な案内システムの開発が好ましい。
【0075】
このような観点に基づき、本発明の判定結果送信装置は、前記構成に加えて、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段と、前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段とを備えていることが好ましい。
【0076】
前記構成によれば、本発明の判定結果送信装置は、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段を備える。
【0077】
よって、前記進路報知装置の前記現在位置におけるユーザの指示方向の先に存在する物体を特定することができる。
【0078】
なお、ここでの「ユーザの指示方向」は、前記指示方位と異なる概念であり、前記装置方向をユーザの指示方向と定義すれば良い。
【0079】
なお、物体を特定する具体的な方法としては、以下で説明する前記物体を含む地図情報と対応づけられた、前記現在位置における指示方向の先に存在する物体の位置座標を特定できる方法であれば、どのような方法及び算出方法を用いても良いが、算出方法の例を挙げれば、以下のような手順による処理方法などが考えられる。但しここでは、3D(3次元)地図情報について考える。また、GPS受信機によって算出される位置座標と地図情報上の位置座標(以下、地図情報上に設定された3D座標系を、単に「座標系」という)との対応関係を予め記録させておく。また、地図情報における施設等の複数の存在領域に対応する前記座標系上の複数の存在領域(以下、「施設領域」という)との対応関係も予め記録されているものとする。
【0080】
まず、GPS受信機によって算出された現在の位置座標に対応する前記座標系上の現在の位置座標を特定する。次に、前記指示方向を前記座標系上で求める。
【0081】
次に、前記座標系上の現在の位置座標を通り当該指示方向に沿う方向の単位ベクトルを方向ベクトルとする直線を前記座標系上の軌跡として求める。
【0082】
次に、前記現在の位置座標を含む所定範囲内に存在する複数の施設領域を特定する(ここでの所定範囲は、ユーザが指示するであろう施設等が含まれているものとして想定される現在の位置座標から所定半径を有する半球領域などが考えられるので、以下ではこの「半球領域」として考える)。
【0083】
次に、この半球領域に含まれる複数の施設領域の中から、前記直線と交わりを持ちかつ現在の位置座標に最も近い施設領域を特定する。
【0084】
このようにして特定された施設領域に対応する施設等をユーザが指示している施設等であると特定する。
【0085】
また、前記構成によれば、前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段を備える。
【0086】
「表示部」としては、例えば、アクティブマトリクス型の液晶表示ディスプレイ、電気泳動型ディスプレイ、ツイストボール型ディスプレイ、微細なプリズムフィルムを用いた反射型ディスプレイ、デジタルミラーデバイス等の光変調素子を用いたディスプレイの他、発光素子として、有機EL発光素子、無機EL発光素子、LED等の発光輝度が可変の素子を用いたディスプレイ、フィールドエミッションディスプレイ(FED)、プラズマディスプレイなどが例示できる。
【0087】
それゆえ、必要に応じて、ユーザが指示する方向の先に存在する物体に関する物体情報を、現実の物体を指示するという直感的な操作によって取得することができる。
【0088】
以上より、前記進路報知装置と連携し、詳細表示可能な表示部を備え、進路案内処理や情報取得処理を行うための各種案内情報を表示する判定結果送信装置及びその制御方法などを提供することができる。
【0089】
なお、本明細書において「案内」とは、前記進路報知装置による報知の他、表示部に表示された地図上に進路案内情報を表示して進路案内処理を行なう場合と、前記指示方向の先に存在する物体(例えば、施設など)に関する物体情報を表示して情報取得処理を行なう場合との両方を含む概念であるものとする。
【0090】
また、「案内情報」には、進路案内のための進路案内情報や、施設等に関する情報を取得して施設等の案内を行なうための施設関係情報(物体情報)などが含まれる概念であるものとする。
【0091】
また、本発明の判定結果送信装置は、前記構成に加えて、前記進路判定結果送信手段は、前記表示部への表示が可能となっている場合には、前記進路判定結果を送信しないことが好ましい。
【0092】
前記表示部への表示が可能となっている場合、進路案内は、判定結果送信装置の表示部への案内情報の表示によって行なえば良いので、前記進路報知装置を動作させなくても良く、このようにして前記進路報知装置の消費電力を節約することができる。
【0093】
なお、判定結果送信装置の案内情報に表示による進路案内と共に、前記進路報知装置による進路案内を併用する構成としても良い。この場合、前記進路報知装置の消費電力を節約できないが、ユーザは適宜、判定結果送信装置の案内情報に表示による進路案内と、前記進路報知装置による進路案内とを選択して利用できるので、ユーザの利便性が向上する。
【0094】
また、「表示が可能となっている」とは、進路報知装置と判定結果送信装置との通信状態が良好であり接続が確立されており、かつ表示部の電源が入っていることを意味する。逆に「表示が可能となっていない」場合は、進路報知装置と判定結果送信装置との通信状態が不良で接続が確立できないか、若しくは表示部の電源が入っていない場合などを意味する。
【0095】
また、本発明の判定結果送信装置は、前記構成に加えて、自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えており、前記表示制御手段は、前記姿勢判定手段によって前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示することが好ましい。
【0096】
前記構成によれば、自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えている。
【0097】
自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なうことができる。
【0098】
なお、姿勢判定手段の判定方法としては、前記姿勢情報取得手段と同様の構成を利用して自装置の姿勢情報を取得し、その姿勢情報に基づいて自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なえば良い。
【0099】
前記姿勢情報取得手段と同様の構成の例としては、3軸センサや6軸センサなどが例示できる。
【0100】
また、6軸センサは、加速度センサと地磁気センサとを組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0101】
また、前記構成によれば、前記表示制御手段は、前記姿勢判定手段によって前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示する。
【0102】
よって、判定結果送信装置が、前記案内情報の表示をユーザが視認できない姿勢になっている場合には、前記案内情報の表示処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0103】
なお、本発明の判定結果送信装置は、前記構成に加えて、前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0104】
前記構成によれば、前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定する。
【0105】
よって、表示部がユーザ視認できる向きとなっている場合のみ前記案内情報を表示するので、表示部がユーザ視認できる向きとなっていないときに無駄な処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0106】
また、本発明の判定結果送信装置は、前記構成に加えて、前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0107】
前記構成によれば、前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定する。
【0108】
よって、表示部の前記案内情報の表示の向きがユーザ視認に適した向きとなっている場合のみ前記案内情報を表示するので、表示部の表示がユーザ視認に適した向きとなっていないときに無駄な処理を行なわないので、判定結果送信装置の消費電力を節約することができる。
【0109】
なお、表示部がの表示の向きがユーザ視認に適した向きとなっているとは、例えば、表示部の表示が上下左右について適切な向きとなっているという意義である。
【0110】
なお、本発明の判定結果送信装置は、前記構成に加えて、水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段と、前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することが好ましい。
【0111】
前記構成によれば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段を備えている。
【0112】
また、前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示する。
【0113】
よって前記案内情報に、前記物体情報に対応する物体を含む地図情報を含めることができる。したがって、表示部に地図情報を表示することで、進路案内を行なうことができる。
【0114】
よって、例えば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内の場合に、前記地図情報を表示し、所定の俯角の範囲外の場合に、前記物体情報を表示することができるので、進路報知装置の姿勢によって、判定結果送信装置の表示部の表示を前記物体情報と前記所定の地図情報とに切り替えることができ、ユーザの利便性が向上する。
【0115】
なお、本発明の指示方向案内システムは、前記構成に加えて、前記進路報知装置を前記情報取得装置として含むと共に、前記判定結果送信装置とを含んでいることが好ましい。
【0116】
前記構成によれば、前記進路報知装置(情報取得装置)と、前記判定結果送信装置とを連携させて動作させることができる指示方向案内システムを提供することができる。
【0117】
なお、前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムにおける各手段、各機能、各ステップ及び各処理のいずれかは、コンピュータによって実現してもよく、この場合には、コンピュータを各手段として動作させ、コンピュータに各機能を実現させ、若しくはコンピュータに各ステップ及び各処理を実行させることにより前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムをコンピュータにて実現させる前記進路報知装置、前記判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システムの制御プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【0118】
以上より、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた進路報知装置、当該進路報知装置と連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう判定結果送信装置、これらの装置の制御方法、これらの装置を連携させた指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供することができる。
【0119】
また、前記進路報知装置と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供することができる。
【発明の効果】
【0120】
本発明の進路報知装置は、以上のように、筐体の位置を示す位置情報を取得する位置情報取得手段と、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えているものである。
【0121】
また、本発明の進路報知装置の制御方法は、以上のように、筐体の位置を示す位置情報を取得する位置情報取得ステップと、前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいる方法である。
【0122】
また、本発明の判定結果送信装置は、以上のように、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えているものである。
【0123】
また、本発明の判定結果送信装置の制御方法は、以上のように、情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいる方法である。
【0124】
それゆえ、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた進路報知装置、その制御方法などを提供できるという効果を奏する。
【0125】
また、前記進路報知装置と連携し、進路判定処理を行なう判定結果送信装置、その制御方法などを提供できるという効果を奏する。
【発明を実施するための最良の形態】
【0126】
本発明の一実施形態について図1〜図9に基づいて説明すれば、以下の通りである。
【0127】
〔1.指示方向案内システムの構成の概要〕
まず、図1に基づき、本発明の一実施形態である指示方向案内システム1の構成について説明する。
【0128】
図1は、指示方向案内システム1の構成を示すブロック図である。
【0129】
図1に示すように指示方向案内システム1は、子機(進路報知装置、情報取得装置)2A及び親機(判定結果送信装置)2Bとを含むシステムである。
【0130】
これにより、子機2Aと、親機2Bとを連携させて動作させることができる指示方向案内システム1を提供することができる。
【0131】
子機2Aは、筐体の位置を示す位置情報及び筐体の姿勢を示す姿勢情報を取得して親機2Bに送信するものである。
【0132】
また、親機2Bは、前記位置情報及び姿勢情報を受信(取得)して、現在位置における指示方位が、所定の進路に沿っているか否かの判定を行いその進路判定結果を子機2Aに送信するものである。
【0133】
また、子機2Aは、親機2Bから前記進路判定結果を受信(取得)してその進路判定結果をユーザに報知するものである。
【0134】
以上の構成によれば、ユーザが進路判定結果の報知を受け、その報知が、指示方位が所定の進路に沿うものを知らせるものであれば、ユーザは、所望の進路に沿って移動していることを直感的に理解することができる。よって、子機2A及び親機2Bを通信によって連携させた指示方向案内システム1を提供することができる。なお、子機2A及び親機2B(指示方向案内システム1)の構成及び動作の詳細については、以下で説明する。
【0135】
〔2.子機2Aの構成〕
次に、図1、図2、図5及び図6に基づき、本発明の一実施形態である子機2Aの構成について説明する。
【0136】
なお、〔2.子機2Aの構成〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0137】
図1に示すように、子機2Aは、子機記録部3A、子機制御部4A、各種センサ部(位置情報取得手段、姿勢情報取得手段)5A、GPS受信アンテナ(位置情報取得手段、全地球位置発見システム受信機)6、対親機無線アンテナ(情報送信手段、進路判定結果取得手段)7、バイブレータ(振動素子、報知手段)8及びLED(発光素子、報知手段)9を備えるものである。
【0138】
子機記録部3Aは、ROM(read only memory)又はRAM(random access memory)によって構成することができ、GPS受信機の受信データと経度、緯度、及び高度(位置座標)との対応関係を示すテーブルデータ(不図示)などが予め記録されている。
【0139】
子機制御部4Aは、子機記録部3A、各種センサ部5A、GPS受信アンテナ6、バイブレータ8及びLED9とデータや指令信号などのやり取りを行なって子機2Aの各構成要素の動作を制御するものである。
【0140】
各種センサ部5Aは、子機6軸センサ(姿勢情報取得手段)51A及び気圧センサ(気圧センサ、位置情報取得手段)52Aによって構成されるものである。
【0141】
また、子機6軸センサ(姿勢情報取得手段)51Aは、筐体の姿勢を示す姿勢情報を取得するものであり、子機地磁気センサ(地磁気センサ、姿勢情報取得手段)53A及び子機加速度センサ(加速度センサ、姿勢情報取得手段)54Aによって構成されている。
【0142】
姿勢情報取得機能を備えるものとしては、特に、子機6軸センサ(姿勢情報取得手段)51Aが好ましい。
【0143】
このように子機6軸センサ51Aを搭載することにより、子機2Aの筐体の姿勢の変化に精度良く追随して姿勢情報を取得することが可能となる。
【0144】
また、子機6軸センサ51Aは、本実施形態のように、子機加速度センサ54Aと子機地磁気センサ53Aとを組合せた構成としても良いが、単独で6軸センサとなり得る素子であっても良い。
【0145】
姿勢情報を取得する機能を備えるものとしては、性能を別とすれば、筐体の傾斜状態を検出する傾斜センサ機能、筐体の絶対的な方位(東西南北)を検出する方位センサ機能、筐体の移動(移動方向及び移動量)を検出する移動センサ機能を有するセンサのどれか1つを設ければ良い。
【0146】
このようなセンサ機能を有するものの例としては、例えば、加速度センサ、地磁気センサ及び傾斜角センサのいずれか1つか、これらのセンサを組合せた3軸センサ及び6軸センサなども例示できる。
【0147】
GPS受信アンテナ6は、複数の衛星からの電波を受信して筐体の現在地を示す経度、緯度および高度といった位置情報を取得するためのアンテナである。
【0148】
対親機無線アンテナ7Aは、親機2Bと通信を行なうためのアンテナである。
【0149】
バイブレータ8は、以下で説明する進路判定結果に基づいて振動させたりする(報知する)ためのものである。
【0150】
LED9は、進路判定結果に基づいて発光させたりする(報知する)ものである。
【0151】
このように、報知機能を有するものの例としては、LEDなどのユーザが進路を直感的に理解できる発光素子による発光や、バイブレータなどの振動素子による振動が利用できる。
【0152】
例えば、現在位置における指示方位が所定の進路に沿っている場合にLED(バイブレータ)が発光(振動)している状態としたり、逆に発光(振動)していない状態としたりすることが考えられる。ただし、子機2Aの消費電力低減の観点からは、LED(バイブレータ)が発光(振動)している状態を現在位置における指示方位が所定の進路に沿っている場合とすることが好ましい。
【0153】
なお、発光素子としては、LEDの他、有機EL発光素子、無機EL発光素子等が例示できる。
【0154】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なうバイブレータ8若しくはLED9を備える構成とすれば、子機2Aに表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0155】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0156】
次に、図2に基づき、子機制御部4Aの構成の詳細について説明する。図2は、指示方向案内システム1を構成する子機2Aにおける子機制御部4Aの構成を示すブロック図である。
【0157】
図2に示すように、子機制御部4Aは、対親機通信制御部(情報送信手段、進路判定結果取得手段)41A、子機出力制御部(報知手段)42A、子機センサ制御部(位置情報取得手段、姿勢情報取得手段)43A、位置座標算出部(位置情報取得手段)44A及びGPS受信制御部(全地球位置発見システム受信機、位置情報取得手段)45Aから構成されている。
【0158】
対親機通信制御部41Aは、親機2Bとの通信を制御するものである。本実施形態の指示方向案内システム1では、子機2Aが対親機通信制御部41Aを介して各種センサ部5A及びGPS受信アンテナ6から取得したアナログ信号を親機2Bに送信し、親機2Bでアナログ信号のデジタル信号化や、情報の演算及び加工を行なって以下で説明する進路判定結果、角度判定結果及びエリア判定結果などを出力し、角度判定結果及びエリア判定結果に基づいて、進路判定結果を子機2Aに送信する構成としている。
【0159】
よって、本実施形態では、子機2Aは、進路判定結果を親機2Bから受けて、バイブレータ8やLED9の動作の制御を行なう。このようにすれば、子機2Aの携帯性をより高めることができる。
【0160】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0161】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。
【0162】
また、対親機通信制御部(進路判定結果取得手段)41A前記は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することが好ましい。
【0163】
例えば、以下で説明する姿勢情報に基づいて決定された装置方向をペン先(以下で説明する長手方向に相当)とするペン型の子機2Aの場合を考える。
【0164】
なお、装置方向及び長手方向などの詳細については、以下で説明する。
【0165】
この場合、ユーザは、子機2Aを使用しない場合には、胸のポケットなどに入れているものと考えられる。
【0166】
そこで、対親機通信制御部41Aは、ペン先と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得するように構成する。
【0167】
例えば、ペン先が上向きであれば、ペン先と鉛直方向とのなす角が所定の角度範囲(例えば、およそ30度以外の角度)内となったときだけ前記取得動作を行なうようにする。
【0168】
以上の構成によれば、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が所定の角度範囲外であって、ユーザが子機2Aを使用していないと想定される場合には、対親機通信制御部41Aが進路判定結果の取得動作を行なわないようにすることにより子機2Aの無駄な電力消費を低減させることができる。
【0169】
ここで、図5に基づいて、ここでの所定の角度範囲について説明する図5は、親機2Bの分岐エリア外における動作を説明するための概要図である。
【0170】
図5では、角度αが、前記所定の角度範囲として設定している例である。なお、角度αは、子機2Aを使用しない場合の角度範囲として約30度以内の角度とすることが好ましい。これより、大きい角度範囲に設定すると、子機2Aの進路判定結果の報知による進路案内処理等に支障をきたすおそれがある。
【0171】
また、対親機通信制御部41Aは、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することが好ましい。
【0172】
また、子機2Aの子機出力制御部42Aが取得する前記エリア判定結果は、以下で説明する親機2Bの位置座標及び地図データ照合部451Bが前記現在位置と所定の地図情報とを照合することによって得られた結果であることが好ましい。
【0173】
ここで、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かについては、例えば、前記位置情報に基づいて決定された位置と所定の地図情報とを照合することによって判断するようにすれば良い。
【0174】
ここで、「所定エリア」の例としては、「分岐エリア」や「特定エリア」などが例示できる。
【0175】
ここで、図6の基づいて説明すれば、例えば、「分岐エリア」とは、例えば、図6に示す円形で囲まれた領域である円形領域となる場合が、考えられる。
【0176】
図6は、指示方向案内システム1に関し、分岐エリアを説明するための概要図である。
すなわち、地図情報における道路が複数交差した交差の中心を分岐点とすると、当該分岐点を含む所定範囲のことである。
【0177】
図6の例では、座標1が分岐エリア内であり、座標2の位置が分岐エリア外である。
【0178】
なお、「所定エリア」が「分岐エリア」の場合には、決定された位置が、所定エリア内に存在しているとのエリア判定結果の場合に前記進路判定結果を取得する。
【0179】
また、「特定エリア」とは、ユーザが進路案内処理を必要としないエリアとして予め定めたエリアのことである。
【0180】
「特定エリア」の例としては、港・駅・空港・建物内など進路案内が不要な施設等のエリアが例示できる。
【0181】
たとえば、図6の例で説明すれば、A店内若しくはB店内の領域が、特定エリアとなる。
【0182】
ここで、「所定エリア」が「特定エリア」の場合には、所定エリア内に存在していないとのエリア判定結果の場合に前記進路判定結果を取得する。
【0183】
以上によれば、対親機通信制御部41Aによる前記進路判定結果の取得は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて行なわれるので、ユーザが子機2Aを必要としていないと想定される場合には、対親機通信制御部41Aの取得動作(受信動作)を行なわないようにすることにより子機2Aの無駄な電力消費を低減させることができる。
【0184】
なお、子機2Aの子機出力制御部42Aが取得する前記進路判定結果は、以下で説明する親機2Bの子機姿勢及び進路照合部453Bが、前記指示方向と所定の進路を示す進路情報とを照合することによって得られた結果であることが好ましい。
【0185】
なお、進路判定結果を導出するための具体例については、例えば、前記現在位置における指示方位と所定の進路を示す進路情報とを照合することによって判断することが考えられる。
【0186】
例えば、前記現在位置における指示方位と、所定の進路を示す進路情報との照合の例としては、前記現在位置における指示方位に沿う方向の単位ベクトルの成分と、所定の進路に沿う方向の単位ベクトルの成分とを算出し、これらの単位ベクトルのなす角を算出して、この角と、所定の進路に沿う方向であるとして予め定められた角度範囲とを照合する方法をなどが例示できる。なお、所定の進路に沿う単位ベクトルの成分は、所定の進路が設定された際に、進路毎に予め算出して記憶させておくことが処理の迅速の観点から好ましい。
【0187】
ここで、ユーザの指示方位と、子機2Aの筐体の姿勢との関係について説明する。
【0188】
以下では、子機2Aの筐体自体の方向を装置方向と呼び、ユーザの指示方位と区別する。
【0189】
まず、子機2Aの筐体の姿勢に基づく装置方向が定義可能な筐体の例としては、図4に示すように、長手方向と短手方向とを判別できる形状で構成された筐体などが考えられる。
【0190】
ここで、「長手方向と短手方向とをユーザが判別できる形状で構成された筐体」の例としては、子機2Aの筐体が、図4に示すような棒状体の他、筒状態、直方体、楕円体その他の子機2Aの筐体を特徴づける径に長手方向と短手方向との2方向の径が存在すると認識できる形状で構成されている筐体が例示できる。
【0191】
例えば、図4の例では、紙面に向かって上下方向が、長手方向であり、左右方向が短手方向ということになる。そして、子機2Aの筐体の長手方向を装置方向と定義する。
【0192】
そうすると、ユーザの指示方位を子機2Aの筐体の長手方向の水平方向への射影とし、子機2Aの筐体の姿勢情報との関係を予め求めておけば、子機2Aの筐体の姿勢情報から子機2Aの筐体の長手方向が求まり、この長手方向から求まる水平方向への射影がユーザの指示方位であると定義すれば良い。
【0193】
子機出力制御部42Aは、各種センサ部5Aが得た位置情報及び姿勢情報に基づく、筐体の現在位置における指示方位が所定の進路に沿う方向であるか否かの進路判定結果を親機2Bから取得すると共に、取得した進路判定結果をユーザに報知するため、バイブレータ8を振動させたり又はLED9を発光させる制御を行なうものである。
【0194】
これにより、子機出力制御部42Aが、バイブレータ8を振動させたり又はLED9を発光させることによって進路判定結果を報知するので、直感的に進路に沿っているか否かが理解できるので、子機2Aに表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0195】
このように、現在位置における指示方位が、所定の進路に沿う方向であるか否かをユーザが直感的に理解できるように報知を行なうバイブレータ8、LED9、及びこれらを制御する子機出力制御部42Aを備える構成とすれば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる。
【0196】
以上より、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0197】
なお、このような進路判定結果の判定主体は、子機2A内にあっても良いし、以下で説明する親機2Bのように子機2Aと連携可能な別の端末装置や電子機器等の内部にあっても良い。
【0198】
例えば、子機2Aと連携可能な別の端末装置や電子機器等の内部にある場合、例えば、以下で説明する親機2Bにおける前記判定主体としての子機姿勢及び進路照合部(進路判定手段)453Bのように親機2Bの内部にある場合、子機2Aは、親機2Bへ前記位置情報及び前記姿勢情報を送信する対親機通信制御部(情報送信手段)41Aを備える構成とする。
【0199】
これにより、子機2Aと連携可能な別の端末装置や電子機器等に以下で説明する進路照合部(進路判定手段)453Bなどによる判定処理を行なわせることができるため、子機2Aの携帯性をより高めることができる。
【0200】
なお、この場合、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0201】
但し、IrDA及びIrSSのような赤外線無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0202】
子機センサ制御部43Aは、各種センサ部5Aの子機6軸センサ51A及び子機加速度センサ54Aを制御して筐体の姿勢情報を取得するものである。
【0203】
位置座標算出部44Aは、GPS受信制御部45Aが取得したアナログ信号から、経度、緯度、高度を算出し、デジタル情報に変換して対親機通信制御部41Aに送信するものである。
【0204】
GPS受信制御部45Aは、GPS受信アンテナ6を介して複数の衛星からの電波をアナログ信号として受信させるものである。
【0205】
なお、本実施形態の子機2Aのように位置情報取得手段は、筐体の位置を示す位置情報を取得する全地球位置発見システム受信機(GPS受信機)及び気圧センサ52Aによって構成されていることが好ましい。
【0206】
ここで、全地球位置発見システム受信機(GPS受信機)の性質上、高度は、装置から衛星までの距離を求めて、地上から衛星までの距離から減算して求めることになるので、高度算出のための演算部が別途必要となる。
【0207】
これに対し、気圧センサ52Aを併用すれば、大気圧と高度とを対応させて予め記録しておけば良いので、上記のような高度算出のための演算部を設けなくて良いので、子機2Aを小型化することができ、より携帯性の向上を図ることができる。
【0208】
この他、位置情報取得機能を持つものの例としては、GPS受信機(global positioning system)、差分情報を用いて補正したDGPS受信機(差動GPS受信機)、及びフェムト通信などの基地局からの情報などにより子機2Aの筐体の絶対位置が特定できればどのようなものを用いても良いが、携帯性向上の観点からは、小型の素子であることが好ましい。
【0209】
次に、図4に基づき子機2Aの一構成例を示す。
【0210】
図4に示すように子機2Aは、上述した長手方向と短手方向とをユーザが判別できる形状で構成された筐体で構成されている。
【0211】
また、上述した各構成要素の配置は、紙面の上からLED9、GPS受信アンテナ6、GPS受信制御部45A、子機制御部4A、子機地磁気センサ53A、子機加速度センサ54Aが配置される。
【0212】
以上に拠れば、表示部が無くとも、指示方向に基づいてユーザが進路を直感的に理解できる携帯性の優れた子機2Aを提供することができる。
【0213】
〔3.親機2Bの構成〕
次に、図1、図3、図5、図7及び図8に基づき、本発明の一実施形態である子機2Aの構成について説明する。なお、〔3.親機2Bの構成〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕及び〔2.子機2Aの構成〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕及び〔2.子機2Aの構成〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0214】
図1に示すように、親機2Bは、親機記録部3B、親機制御部4B、対子機無線アンテナ(情報取得手段、進路判定結果送信手段)7B、ディスプレイ(表示部)10、入力操作部11、インターフェース12、及び親機6軸センサ51Bから構成されている。
【0215】
親機記録部3Bは、ROM(read only memory)又はRAM(random access memory)によって構成することができ、3D(Dimension)地図データ(地図情報)、2D進路データ(所定の進路)、特定エリア情報、分岐エリア情報、(3D地図データ上の)位置座標、施設関係(物体情報)などが予め記録されている。
【0216】
親機制御部4Bは、子機記録部3A、対親機無線アンテナ7A、ディスプレイ10、入力操作部11、インターフェース12、親機6軸センサ51Bと各種データや指令信号などのやり取りをしてこれらの構成要素の制御を行なうものである。
【0217】
対子機無線アンテナ7Bは、子機2Aと通信を行なうためのアンテナである。なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0218】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0219】
ディスプレイ10は、案内情報などの各種情報を表示するものであり、主として、後述する子機姿勢及び施設座標照合部(指示物特定手段)452Bによって特定された施設等に関する施設関係情報(物体情報)を表示するものである。
【0220】
なお、「案内情報」には、進路案内のための進路案内情報や、以下で説明する施設に関する情報を取得して施設等の案内を行なうための施設関係情報(物体情報)などが含まれる概念である。
【0221】
また、本明細書において「案内」とは、上記の子機2Aによる進路判定結果の報知の他、ディスプレイ10に表示された地図上に進路案内情報を表示して進路案内処理を行なう場合と、後述するように、前記指示方向の先に存在する物体(例えば、施設など)に関する物体情報を表示して情報取得処理を行なう場合との両方を含む概念であるものとする。
【0222】
また、ディスプレイ10としては、例えば、アクティブマトリクス型の液晶表示ディスプレイ、電気泳動型ディスプレイ、ツイストボール型ディスプレイ、微細なプリズムフィルムを用いた反射型ディスプレイ、デジタルミラーデバイス等の光変調素子を用いたディスプレイの他、発光素子として、有機EL発光素子、無機EL発光素子、LED等の発光輝度が可変の素子を用いたディスプレイ、フィールドエミッションディスプレイ(FED)、プラズマディスプレイなどが例示できる。
【0223】
入力操作部11は、ユーザの意思を入力信号としてインターフェース12を介して親機制御部4Bに伝達するためのものである。
【0224】
なお、入力操作部11は、本実施形態のように子機2Aの指示方向により進路案内情報と施設関係情報とを切り替える「自動処理」と、ユーザが手動で切り替える「手動処理」とが選択できるような「処理切り替え命令」などが入力できるように構成しても良い。
【0225】
この場合は、ユーザの利便性が向上するとともに指示方向案内システム1の電力消費を低減することが可能となる。
【0226】
インターフェース12は、入力操作部11からのアナログの入力信号をデジタル信号に変換して親機制御部4Bに送信するものである。
【0227】
親機6軸センサ51Bは、親機2Bの姿勢を示す姿勢情報を取得するものであり、本実施形態では、親機地磁気センサ53B及び親機加速度センサ54Bから構成されている。
【0228】
なお、親機2Bの姿勢情報を取得する機能を備えるものとしては、3軸センサや6軸センサなどが例示できる。
【0229】
また、親機6軸センサ51Bは、親機地磁気センサ53B及び親機加速度センサ54を組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0230】
なお、親機6軸センサ51Bとしては、6軸センサの他、3軸センサやなどが例示できる。
【0231】
また、親機6軸センサ51Bは、本実施形態のように、親機地磁気センサ53B及び親機加速度センサ54とを組合せたものに限られず、単独で6軸センサとなり得る素子であっても良いが、携帯性向上の観点から小型の素子で構成することが好ましい。
【0232】
次に、図3に基づき、親機2Bの親機制御部4Bの構成の詳細について説明する。
【0233】
図3は、指示方向案内システム1を構成する親機2Bにおける親機制御部4Bの構成を示すブロック図である。
【0234】
図3に示すように、親機制御部4Bは、対子機通信制御部(情報取得手段、進路判定結果送信手段)41B、親機出力制御部(表示制御手段)42B、親機センサ制御部43B、データ算出部44B、データ照合部45B、記録制御部46B及び特定エリアor分岐エリア判定部(俯角判定手段)47Bからなる構成である。
【0235】
対子機通信制御部41Bは、対子機無線アンテナ7Bを介して子機2Aとの通信を制御するものである。主として、以下で説明するように子機姿勢及び進路照合部(進路判定手段)453Bにより出力される進路判定結果を送信する。
【0236】
なお、通信方式に関する規約(通信プロトコル)としては、Bluetooth、Felica、WirelessLAN(無線LAN:WLAN)、IrDA(赤外線無線)、IrSS(赤外線無線)、及びWCDMA(通信網)などが例示できる。
【0237】
但し、IrDA及びIrSSのような赤外無線の場合は、子機2Aと親機2Bとの状態によって通信が制限される場合があるので、あまり好ましくない。しかしながら、将来的にこのような通信制限を克服する技術が開発される場合も想定できるため、ここで例示している。
【0238】
対子機通信制御部41Bは、ディスプレイ10への表示が可能となっている場合には、前記進路判定結果を送信しないことが好ましい。
【0239】
ディスプレイ10への表示が可能となっている場合、進路案内は、親機2Bのディスプレイ10への案内情報の表示によって行なえば良いので、子機2Aを動作させなくても良く、このようにして子機2Aの消費電力を節約することができる。
【0240】
なお、親機2Bの案内情報に表示による進路案内と共に、子機2Aによる進路案内を併用する構成としても良い。この場合、子機2Aの消費電力を節約できないが、ユーザは適宜、親機2Bの案内情報に表示による進路案内と、子機2Aによる進路案内とを選択して利用できるので、ユーザの利便性が向上する。
【0241】
また、「表示が可能となっている」とは、子機2Aと親機2Bとの通信状態が良好であり接続が確立されており、かつディスプレイ10の電源が入っていることを意味する。逆に「表示が可能となっていない」場合は、子機2Aと親機2Bとの通信状態が不良で接続が確立できないか、若しくはディスプレイ10の電源が入っていない場合などを意味する。
【0242】
親機出力制御部42Bは、以下で説明する子機姿勢及び施設座標照合部(指示物特定手段)452Bによって特定された物体に関する物体情報を取得してディスプレイ10に表示する制御を行なうものである。
【0243】
ところで、特許文献4に開示された手持ち式装置では、現在アドレスされている物と判断された物に関する情報を表示する機能はあるものの、進路案内を行なう機能については開示されていない。
【0244】
また、最近は、ほとんどすべてのユーザが携帯機器を携帯していることが多く、不使用時には、ポケットやカバンなどに入れられていることが多い。
【0245】
そうすると、ユーザの利便性を向上させるには、さらに、ユーザが必要に応じて進路案内に加え、ユーザが指示する施設などの物体に関する情報を取得したい場合には、ポケットやカバンなどに入れられている詳細表示可能な表示部を有する携帯機器を取り出し、前記進路報知装置と連携して進路案内処理や施設情報取得処理を行うような総合的な案内システムの開発が好ましい。
【0246】
このような観点に基づき、親機2Bは、前記現在位置におけるユーザの指示方向の先に存在する物体を特定する子機姿勢及び施設座標照合部452Bと、特定された物体に関する物体情報を取得してディスプレイ10に表示する親機出力制御部42Bとを備える構成にしている。
【0247】
親機センサ制御部43Bは、親機6軸センサ51Bの動作の制御を行なって親機2Bの姿勢を示す姿勢情報を親機6軸センサ51Bに取得させるものである。
【0248】
データ算出部44Bは、各種データを算出するものであり、親機姿勢算出部(姿勢判定手段)441B及び子機姿勢算出部(角度判定手段)442Bから構成される。
【0249】
親機姿勢算出部441Bは、親機センサ制御部43Bから親機2Bの姿勢を示す姿勢情報に基づいて親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であるか否かの判定を行なうものである。なお、ディスプレイ10は、親機姿勢算出部441Bで親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示する。
【0250】
次に、図8に基づき、親機2Bの姿勢が、ディスプレイ10における表示をユーザが視認できる姿勢であるか否かを判定する具体例について説明する。
【0251】
図8は、指示方向案内システム1の動作を説明するための概要図である。
【0252】
親機姿勢算出部441Bは、鉛直方向とディスプレイ10における表示面の法線方向とのなす角(図8の角度β)が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0253】
角度βは、ユーザの利便性を考えれば、約30度から90度までの角度であることが好ましい。
【0254】
これにより、ディスプレイ10がユーザ視認できる向きとなっている場合のみ前記案内情報を表示するので、ディスプレイ10がユーザ視認できる向きとなっていないときに無駄な処理を行なわないので、親機2Bの消費電力を節約することができる。
【0255】
一方、親機姿勢算出部441Bは、水平方向とディスプレイ10における表示の左右方向とのなす角(図8の角度θ)が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することが好ましい。
【0256】
これにより、ディスプレイ10の前記案内情報の表示の向きがユーザ視認に適した向きとなっている場合のみ前記案内情報を表示するので、ディスプレイ10の表示がユーザ視認に適した向きとなっていないときに無駄な処理を行なわないので、親機2Bの消費電力を節約することができる。
【0257】
なお、ディスプレイ10の表示の向きがユーザ視認に適した向きとなっているとは、例えば、ディスプレイ10の表示が上下左右について適切な向きとなっているという意義である。
【0258】
以上より、親機2Bの姿勢が、ディスプレイ10の表示をユーザが視認できない姿勢になっている場合には、前記案内情報の表示処理を行なわないので、親機2Bの消費電力を節約することができる。
【0259】
子機姿勢算出部442Bは、子機2Aから送信された子機2Aの位置を示す位置情報(経度、緯度、及び高度など)及び子機2Aの姿勢情報に基づき、子機2Aによるユーザの指示方向や、指示方位及び子機2Aの装置方向などを算出する(出力)ものである。
【0260】
なお、子機姿勢算出部442Bは、水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定することが好ましい。
【0261】
また、親機出力制御部42Bは、子機姿勢算出部442Bによって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することが好ましい。
【0262】
これにより、前記案内情報に、前記物体情報に対応する物体を含む地図情報を含めることができる。したがって、ディスプレイ10に地図情報を表示することで、進路案内を行なうことができる。
【0263】
よって、例えば、前記姿勢情報に基づいて決定された装置方向と水平方向とのなす角が、所定の俯角の範囲内の場合に、前記地図情報を表示し、所定の俯角の範囲外の場合に、前記物体情報を表示することができるので、子機2Aの姿勢によって、親機2Bのディスプレイ10の表示を前記物体情報と前記所定の地図情報とに切り替えることができ、ユーザの利便性が向上する。
【0264】
ここで、図5に基づき、ここでの所定の俯角の範囲内について説明する。図5では、角度δが示されているが、所定の俯角の範囲内は、この場合、180度―角度δに設定している。角度δは、約90度の角度を示している。なお、角度δは、上記前記物体情報と前記所定の地図情報との切り替えが適切に行なえるように設定すれば良い。
【0265】
次に、データ照合部45Bは、子機2Aから取得(受信)した子機2Aの位置情報及び姿勢情報、並びに、親機センサ制御部43Bが取得した親機2Bの姿勢情報と、親機記録部3Bに記録された3D(Dimension)地図データ(地図情報)、2D進路データ(所定の進路)、(3D地図データ上の)施設データ(施設等の位置データ)などの各種データと照合を行なうものであり、位置座標及び地図データ照合部(位置情報取得手段)451B、子機姿勢及び施設座標照合部(指示物特定手段)452B、及び子機姿勢及び進路照合部(進路判定手段)453B構成されるものである。
【0266】
位置座標及び地図データ照合部451は、3D(Dimension)地図データ(地図情報)に対応づけられた前記座標系上の位置情報と、子機2Aの位置情報とを照合して、子機2Aの3D地図データ上の位置を特定するものである。
【0267】
子機姿勢及び施設座標照合部452Bは、3D地図データ上の施設等の位置データと、子機2Aの指示方向とを照合して、子機2Aの前記現在位置におけるユーザの指示方向の先に存在する物体を特定するものである。
【0268】
なお、ここでの「ユーザの指示方向」は、前記指示方位と異なる概念であり、前記装置方向をユーザの指示方向と定義すれば良い。
【0269】
なお、物体を特定する具体的な方法としては、前記物体を含む地図情報と対応づけられた、前記現在位置における指示方向の先に存在する物体の位置座標を特定できる方法であれば、どのような方法及び算出方法を用いても良いが、算出方法の例を挙げれば、以下のような手順による処理方法などが考えられる。但しここでは、3D(3次元)地図情報について考える。また、子機2AのGPS受信制御部45Aの受信電波に基づいて位置座標算出部44Aによって算出される経度、緯度、高度(位置座標)と地図情報上の位置座標(以下、地図情報上に設定された3D座標系を、単に「座標系」という)との対応関係を親機記録部3Bに予め記録させておく。また、地図情報における施設等の複数の存在領域に対応する前記座標系上の複数の存在領域(以下、「施設領域」という)との対応関係も予め記録されているものとする(不図示)。
【0270】
まず、位置座標算出部44Aによって算出された現在の位置座標に対応する前記座標系上の現在の位置座標を特定する。次に、前記指示方向を前記座標系上で求める。
【0271】
次に、前記座標系上の現在の位置座標を通り当該指示方向に沿う方向の単位ベクトルを方向ベクトルとする直線を前記座標系上の軌跡として求める。
【0272】
次に、前記現在の位置座標を含む所定範囲内に存在する複数の施設領域を特定する(ここでの所定範囲は、ユーザが指示するであろう施設等が含まれているものとして想定される現在の位置座標から所定半径を有する半球領域などが考えられるので、以下ではこの「半球領域」として考える)。
【0273】
次に、この半球領域に含まれる複数の施設領域の中から、前記直線と交わりを持ちかつ現在の位置座標に最も近い施設領域を特定する。
【0274】
このようにして特定された施設領域に対応する施設等をユーザが指示している施設等であると特定する。
【0275】
子機姿勢及び進路照合部453Bは、子機2Aの前記現在位置における指示方位と、2D進路データとを照合して、前記現在位置における指示方位が、前記所定の進路に沿っているか否かを判定して、進路判定結果を出力するものである。
【0276】
記録制御部46Bは、子機2Aから所得した子機2Aの位置情報及び姿勢情報を記録したり、データ算出部44B及びデータ照合部45Bから出力される各種データを親機記録部3Bに一時的に記録させる制御を行なうものである。
【0277】
ここで、図7基づき、進路判定処理の概要について説明する。
【0278】
図7は、指示方向案内システム1に関し、分岐エリアでの動作を説明するための概要図である。
【0279】
図7では、紙面に対して前後、及び左右にまっすぐ伸びた道路が交差して十字路が生じている様子を示している。
【0280】
ユーザのこれまでの進行方向は、「後」から「前」すなわち、白抜きの矢印の示す方向であるものとする。
【0281】
また、ここでの所定の進路は、紙面に向かって右折、すなわち、黒の矢印の示す進路であるものとする。
【0282】
子機2Aが、破線で示されている姿勢をとっている場合には、不正解、すなわち、親機2Bにより指示方位が所定の進路に沿っていないと判定されて、LED9が発光していない様子を示している。
【0283】
一方、子機2Aが、実線で示される姿勢をとっている場合には、正解、すなわち、親機2Bにより、指示方位が所定の進路に沿っていると判定されて、LED9が発光している様子を示している。
【0284】
以上によれば、所定の進路に沿う方向であるか否かの判定を親機2B側で行なうので、子機2Aの携帯性をより高めることができる。
【0285】
以上より、子機2Aと連携し、進路判定処理を行なう親機2Bを提供できるという効果を奏する。
【0286】
それゆえ、必要に応じて、ユーザが指示する方向の先に存在する物体に関する物体情報を、現実の物体を指示するという直感的な操作によって取得することができる。
【0287】
以上より、表示部が無くとも、指示方位に基づいて進路を直感的に理解できるような携帯性の優れた子機2A、子機2Aと連携して前記指示方位が進路に沿う方向であるか否かの判定を行なう親機2B、これらの装置を連携させた指示方向案内システム1などを提供することができる。
【0288】
〔4.指示方向案内システム1の動作〕
次に、図1〜図3及び図9に基づき、指示方向案内システム1の詳細な動作について説明する。
【0289】
なお、〔4.指示方向案内システム1の動作〕において説明すること以外の構成は、〔1.指示方向案内システムの構成の概要〕、〔2.子機2Aの構成〕及び〔3.親機2Bの構成〕と同じである。また、説明の便宜上、〔1.指示方向案内システムの構成の概要〕、〔2.子機2Aの構成〕及び〔3.親機2Bの構成〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0290】
図9は、指示方向案内システム1の動作を説明するためのフローチャートである。
【0291】
図9のステップS1(以下「ステップ」は、省略する)では、まず、図1及び2に示すように、子機2AのGPS受信制御部45Aが、GPS受信アンテナ6を介して複数の衛星からの電波信号を受信する共に、位置座標算出部44Aに送信する。
【0292】
次に、位置座標算出部44Aは、前記電波信号に基づいて、経度、緯度、及び高度(以下、単に「位置情報」という。)を算出する。
【0293】
また、子機2Aの子機センサ制御部43Aは、各種センサ部5Aの子機6軸センサ51A(子機地磁気センサ53A・子機加速度センサ54A)からの検出結果である姿勢信号を受けてアナログ/デジタル変換を行ないデジタル情報としての姿勢情報を出力する(以下、アナログ/デジタル変換及びデジタル/アナログ変換などの処理については、省略する。)。
【0294】
また、子機2Aの子機センサ制御部43Aは、各種センサ部5Aの気圧センサ52Aにからの検出結果である圧力信号を受信し、デジタル情報としての高度に関する位置情報を出力する。その後S2に進む(なお、以上の動作は、順不同である)。
【0295】
次に、S2では、位置座標算出部44Aが対親機通信制御部41Aに位置情報を送信し、子機センサ制御部43Aは、姿勢情報及び高度に関する位置情報を対親機通信制御部41Aに送信してS3に進む(なお、以上の動作は、順不同である)。
【0296】
次に、S3では、対親機通信制御部41Aが、対親機無線アンテナ7Aを介して、位置情報、姿勢情報及び高度に関する位置情報を親機2Bに送信する。
【0297】
親機2Bの対子機通信制御部41Bは、対子機無線アンテナ7Bを介して、位置情報、姿勢情報及び高度に関する位置情報を受信すると、記録制御部46Bに送信する。記録制御部46Bは、親機記録部3BのRAMに位置情報、高度に関する位置情報(以下、これらを纏めて「位置情報」という)、及び姿勢情報を一時記録させる。
【0298】
次に、親機記録部3Bは、上記の記録が完了すると、データ算出部44Bの子機姿勢算出部442Bに「動作命令」を発する。
【0299】
子機姿勢算出部442Bは、前記「動作命令」を受けると、親機記録部3Bに一時記録された姿勢情報を読み出し、姿勢情報に基づいて、子機2Aの装置方向を算出する。
【0300】
子機姿勢算出部442Bは、子機2Aの装置方向と、鉛直上向き(鉛直方向)とのなす角が、所定の閾値の角度αを超えているか否かを判定し、角度判定結果を得ると共にその角度判定結果を親機記録部3Bに一時記録させる。
【0301】
角度判定結果が、所定の閾値の角度αを超えているとの結果である場合には、「YES」となり、子機2Aの現在位置における指示方向を算出して親機記録部3Bに一時記録させてS4に進む。一方、角度判定結果が、所定の閾値の角度αを超えているとの結果である場合には、「NO」となり親機2B側の動作が終了するためS1に戻る。
【0302】
次に、S4では、子機姿勢算出部442Bが親機出力制御部42Bにディスプレイ10の電源が入っているか否かの「問い合わせ信号」を発する。
【0303】
親機出力制御部42Bは、子機姿勢算出部442Bから「問い合わせ信号」を受けると、ディスプレイ10の電源がONの場合には、「ON信号」を発してS5に進む。子機姿勢算出部442Bは、親機出力制御部42Bから「ON信号」を受けて親機センサ制御部43Bに「動作命令」を発してS5に進む。
【0304】
一方、S4で、ディスプレイ10の電源がOFFの場合には、「OFF信号」を発してS10に進む。
【0305】
S5では、親機センサ制御部43Bが、親機6軸センサ51B(親機地磁気センサ53B・親機加速度センサ54B)に「動作命令」を発する。
【0306】
親機6軸センサ51Bは、親機センサ制御部43Bから「動作命令」を受けると、姿勢信号を検出し、親機センサ制御部43Bに送信する。
【0307】
親機センサ制御部43Bは、姿勢信号を姿勢情報に変換して親機姿勢算出部441Bに送信してS6に進む。
【0308】
S6では、親機姿勢算出部441Bは、姿勢情報から親機2Bのディスプレイ10における表示面の法線方向と鉛直方向とのなす角が、所定の角度範囲内(図8の閾値の角度β)か否かを判定し、第1角度判定結果を出力する。
【0309】
また、親機姿勢算出部441Bは、姿勢情報から親機2Bの水平方向とディスプレイ10における表示の左右方向とのなす角が、所定の角度範囲内(図8の角度θ)か否かを判定し、第2角度判定結果を出力する。
【0310】
第1角度判定結果が角度β内であり、かつ第2角度判定結果が角度θ内である場合には、「YES」となり、S7に進む。一方、S6で、第1角度判定結果が角度β内でないか、又は第2角度判定結果が角度θ内でない場合には、「NO」となりS10に進む。
【0311】
S7では、親機姿勢算出部441Bがデータ照合部45Bの位置座標及び地図データ照合部451に「動作命令」を送信する。
【0312】
位置座標及び地図データ照合部451は、「動作命令」を受けると、親機記録部3Bに記録されている子機2Aの位置情報と、3D地図データを照合させて、3D地図データ上の座標系における位置座標(現在位置)を求めて、親機記録部3Bに一時記録させると共に、特定エリアor分岐エリア判定部47Bに「動作命令」を発してS8に進む。
【0313】
S8では、特定エリアor分岐エリア判定部47Bが、親機記録部3Bに一時記録されている子機2Aの現在位置と特定エリア情報とに基づいて、子機2Aの現在位置が特定エリア内か否かを判定して特定エリア判定結果(エリア判定結果)として出力する。
【0314】
特定エリア判定結果が、子機2Aの現在位置が特定エリア内であるとの判定であった場合には、「YES」となり、特定エリアor分岐エリア判定部47Bは、子機姿勢及び施設座標照合部452Bに「動作命令」を発してS9に進む。
【0315】
一方、S8で、特定エリア判定結果が、子機2Aの現在位置が特定エリア内でないとの判定であった場合には、「NO」となり、S14に進む。
【0316】
S9では、子機姿勢及び施設座標照合部452Bが「動作命令」を受けて、親機記録部3Bから子機2Aの現在位置における指示方向の先にある施設を施設データ(施設の座標系上の位置座標)から特定し、施設特定結果として出力し、親機出力制御部42Bに「動作命令」を発する。
【0317】
親機出力制御部42Bは、「動作命令」を受けて親機記録部3Bから、前記施設特定結果に基づいて、特定された施設(物体)に関する施設関係情報(物体情報)を読み出す。
【0318】
親機出力制御部42Bは、ディスプレイ10に施設関係情報を表示させて「END」となる。
【0319】
S14では、特定エリアor分岐エリア判定部47Bが、親機記録部3Bに一時記録されている子機2Aの現在位置と分岐エリア情報とに基づいて、子機2Aの現在位置が分岐エリア内か否かを判定して分岐エリア判定結果(エリア判定結果)として出力する。
【0320】
分岐エリア判定結果が、子機2Aの現在位置が分岐エリア内であるとの判定であった場合には、「YES」となり、S15に進む。
【0321】
一方、S14で、分岐エリア判定結果が、子機2Aの現在位置が分岐エリア内でないとの判定であった場合には、「No」となり、S9に進む。
【0322】
S15では、特定エリアor分岐エリア判定部47Bが、一時記録されている子機2Aの角度判定結果を読み出し、角度判定結果が閾値の角度δの範囲内にあるか否かを判定し、俯角判定結果として出力する。
【0323】
ここで、俯角判定結果が、角度δの範囲内であった場合には、S9に進む。
【0324】
一方、俯角判定結果が、角度δの範囲外であった場合には、S10に進む。
【0325】
S10では、特定エリアor分岐エリア判定部47Bが、子機姿勢及び進路照合部453Bに「動作命令」を発する。
【0326】
子機姿勢及び進路照合部453Bは、「動作命令」を受けて親機記録部3Bから一時記録されている位置情報及び姿勢情報に基づき子機2Aの現在位置における指示方位と、2D進路データ(所定の進路)とを照合して進路判定結果を出力してS11に進む。
【0327】
S11では、進路判定結果が、前記進路に沿っているとの判定結果であった場合には、「YES」となり、子機姿勢及び進路照合部453Bが、「進路判定結果」を対子機通信制御部41Bに送信してS12に進む。
【0328】
一方、進路判定結果が、前記進路に沿っていないの判定結果であった場合には、「NO」となり、子機姿勢及び進路照合部453Bが、動作を終了させてS1に戻る。
【0329】
S12では、対子機通信制御部41Bが、対子機無線アンテナ7Bを介して進路判定結果を子機2Aに送信する。子機2Aの対子機通信制御部41Bは「進路判定結果」を対親機無線アンテナ7Aを介して受信し、それを子機出力制御部42Aに送信する。
【0330】
子機出力制御部42Aは、「進路判定結果」を取得すると、バイブレータ8を振動させるか、LED9を発光(点灯)させて「END」となる。
【0331】
最後に、指示方向案内システム1及び子機2A・親機2Bの各ブロック、特に子機制御部4A・親機制御部4Bは、ハードウェアロジックによって構成してもよいし、次のようにCPUを用いてソフトウェアによって実現してもよい。
【0332】
すなわち、指示方向案内システム1及び子機2A・親機2Bは、各機能を実現する制御プログラムの命令を実行するCPU(central processing unit)、前記プログラムを格納したROM(read only memory)、前記プログラムを展開するRAM(random access memory)、前記プログラムおよび各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。(例えば、図1に示す子機記録部3A・親機記録部3B)
そして、本発明の目的は、上述した機能を実現するソフトウェアである指示方向案内システム1及び子機2A・親機2Bの制御プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、前記指示方向案内システム1及び子機2A・親機2Bに供給し、そのコンピュータ(又はCPUやMPU)が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
【0333】
前記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ系、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやコンパクトディスク−ROM/MO/MD/デジタルビデオデイスク/コンパクトディスク−R等の光ディスクを含むディスク系、ICカード(メモリカードを含む)/光カード等のカード系、あるいはマスクROM/EPROM/EEPROM/フラッシュROM等の半導体メモリ系などを用いることができる。
【0334】
また、指示方向案内システム1及び子機2A・親機2Bを通信ネットワークと接続可能に構成し、前記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークとしては、特に限定されず、例えば、インターネット、イントラネット、エキストラネット、LAN、ISDN、VAN、CATV通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、802.11無線、HDR、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、前記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
【産業上の利用可能性】
【0335】
本発明は、簡易で携帯性の高いナビゲーション機器と、詳細表示可能な表示機器(PDA:Personal Digital Assistant)などとが連携して、進路案内処理や情報取得処理を行うパーソナルナビゲーションデバイス(PND)の分野などに用いることができる。
【図面の簡単な説明】
【0336】
【図1】本発明における指示方向案内システムの実施の一形態を示すブロック図である。
【図2】前記指示方向案内システムを構成する進路報知装置における制御部の構成を示すブロック図である。
【図3】前記指示方向案内システムを構成する判定結果送信装置における制御部の構成を示すブロック図である。
【図4】前記進路報知装置の一構成例を示す断面図である。
【図5】前記進路方向報知装置に関し、分岐エリア外における動作を説明するための概要図である。
【図6】前記指示方向案内システムに関し、分岐エリアを説明するための概要図である。
【図7】前記指示方向案内システムに関し、分岐エリアでの動作を説明するための概要図である。
【図8】前記判定結果送信装置の動作を説明するための概要図である。
【図9】前記指示方向案内システムの動作を説明するためのフローチャートである。
【符号の説明】
【0337】
1 指示方向案内システム
2A 子機(進路報知装置、情報取得装置)
2B 親機(判定結果送信装置)
3A 子機記録部
3B 親機記録部
4A 子機制御部
4B 親機制御部
5A 各種センサ部(位置情報取得手段、姿勢情報取得手段)
6 GPS受信アンテナ(位置情報取得手段、全地球位置発見システム受信機)
7A 対親機無線アンテナ(情報送信手段、進路判定結果取得手段)
7B 対子機無線アンテナ(情報取得手段、進路判定結果送信手段)
8 バイブレータ(振動素子、報知手段)
9 LED(発光素子、報知手段)
10 ディスプレイ(表示部)
11 入力操作部
12 インターフェース
41A 対親機通信制御部(情報送信手段、進路判定結果取得手段)
41B 対子機通信制御部(情報取得手段、進路判定結果送信手段)
42A 子機出力制御部(報知手段)
42B 親機出力制御部(表示制御手段)
43A 子機センサ制御部(位置情報取得手段、姿勢情報取得手段)
43B 親機センサ制御部
44A 位置座標算出部(位置情報取得手段)
44B データ算出部
45A GPS受信制御部(全地球位置発見システム受信機、位置情報取得手段)
45B データ照合部
46B 記録制御部
47B 特定エリアor分岐エリア判定部(俯角判定手段)
51A 子機6軸センサ(姿勢情報取得手段)
51B 親機6軸センサ
52A 気圧センサ(位置情報取得手段)
53A 子機地磁気センサ(地磁気センサ、姿勢情報取得手段)
53B 親機地磁気センサ
54A 子機加速度センサ(加速度センサ、姿勢情報取得手段)
54B 親機加速度センサ
441B 親機姿勢算出部(姿勢判定手段)
442B 子機姿勢算出部(角度判定手段)
451B 位置座標及び地図データ照合部(位置情報取得手段)
452B 子機姿勢及び施設座標照合部(指示物特定手段)
453B 子機姿勢及び進路照合部(進路判定手段)
【特許請求の範囲】
【請求項1】
筐体の位置を示す位置情報を取得する位置情報取得手段と、
前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、
前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、
前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えていることを特徴とする進路報知装置。
【請求項2】
前記進路判定結果取得手段は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することを特徴とする請求項1に記載の進路報知装置。
【請求項3】
前記進路判定結果取得手段は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することを特徴とする請求項1又は2に記載の進路報知装置。
【請求項4】
前記位置情報取得手段は、全地球位置発見システム受信機及び気圧センサによって構成されていることを特徴とする請求項1から3までのいずれか1項に記載の進路報知装置。
【請求項5】
前記姿勢情報取得手段は、6軸センサによって構成されていることを特徴とする請求項1から4までのいずれか1項に記載の進路報知装置。
【請求項6】
前記報知手段は、発光素子によって構成されており、
前記進路判定結果に基づいて前記発光素子を発光させることを特徴とする請求項1から5までのいずれか1項に記載の進路報知装置。
【請求項7】
前記報知手段は、振動素子によって構成されており、
前記進路判定結果に基づいて前記振動素子を振動させることを特徴とする請求項1から6までのいずれか1項に記載の進路報知装置。
【請求項8】
前記進路判定結果を送信する判定結果送信装置へ前記位置情報及び前記姿勢情報を送信する情報送信手段を備えていることを特徴とする請求項1から7までのいすれか1項に記載の進路報知装置。
【請求項9】
請求項1から8までのいすれか1項に記載の進路報知装置における各手段としてコンピュータを動作させるための進路報知プログラム。
【請求項10】
請求項9に記載の進路報知プログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項11】
筐体の位置を示す位置情報を取得する位置情報取得ステップと、
前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、
前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、
前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいることを特徴とする進路報知装置の制御方法。
【請求項12】
情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、
前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、
前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えていることを特徴とする判定結果送信装置。
【請求項13】
前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段と、
前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段とを備えていることを特徴とする請求項12に記載の判定結果送信装置。
【請求項14】
前記進路判定結果送信手段は、前記表示部への表示が可能となっている場合には、前記進路判定結果を送信しないことを特徴とする請求項13に記載の判定結果送信装置。
【請求項15】
自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えており、
前記表示制御手段は、前記姿勢判定手段によって自装置の姿勢が前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示することを特徴とする請求項13又は14に記載の判定結果送信装置。
【請求項16】
前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することを特徴とする請求項15に記載の判定結果送信装置。
【請求項17】
前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することを特徴とする請求項16に記載の判定結果送信装置。
【請求項18】
水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段と、
前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することを特徴とする請求項13から17までのいずれか1項に記載の判定結果送信装置。
【請求項19】
情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、
前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、
前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいることを特徴とする判定結果送信装置の制御方法。
【請求項20】
請求項12から18までのいずれか1項に記載の判定結果送信装置における各手段としてコンピュータを動作させるための判定結果送信プログラム。
【請求項21】
請求項20に記載の判定結果送信プログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項22】
請求項8に記載の進路報知装置を情報取得装置として含むとともに、請求項12から18までのいずれか1項に記載の判定結果送信装置を含んでいることを特徴とする指示方向案内システム。
【請求項1】
筐体の位置を示す位置情報を取得する位置情報取得手段と、
前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得手段と、
前記位置情報及び前記姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得手段と、
前記進路判定結果取得手段が取得した前記進路判定結果を報知する報知手段とを備えていることを特徴とする進路報知装置。
【請求項2】
前記進路判定結果取得手段は、前記姿勢情報に基づいて決定された装置方向と鉛直方向とのなす角が、所定の角度範囲内である場合に前記進路判定結果を取得することを特徴とする請求項1に記載の進路報知装置。
【請求項3】
前記進路判定結果取得手段は、前記位置情報に基づいて決定された位置が、所定エリア内に存在しているか否かのエリア判定結果に基づいて前記進路判定結果を取得することを特徴とする請求項1又は2に記載の進路報知装置。
【請求項4】
前記位置情報取得手段は、全地球位置発見システム受信機及び気圧センサによって構成されていることを特徴とする請求項1から3までのいずれか1項に記載の進路報知装置。
【請求項5】
前記姿勢情報取得手段は、6軸センサによって構成されていることを特徴とする請求項1から4までのいずれか1項に記載の進路報知装置。
【請求項6】
前記報知手段は、発光素子によって構成されており、
前記進路判定結果に基づいて前記発光素子を発光させることを特徴とする請求項1から5までのいずれか1項に記載の進路報知装置。
【請求項7】
前記報知手段は、振動素子によって構成されており、
前記進路判定結果に基づいて前記振動素子を振動させることを特徴とする請求項1から6までのいずれか1項に記載の進路報知装置。
【請求項8】
前記進路判定結果を送信する判定結果送信装置へ前記位置情報及び前記姿勢情報を送信する情報送信手段を備えていることを特徴とする請求項1から7までのいすれか1項に記載の進路報知装置。
【請求項9】
請求項1から8までのいすれか1項に記載の進路報知装置における各手段としてコンピュータを動作させるための進路報知プログラム。
【請求項10】
請求項9に記載の進路報知プログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項11】
筐体の位置を示す位置情報を取得する位置情報取得ステップと、
前記筐体の姿勢を示す姿勢情報を取得する姿勢情報取得ステップと、
前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する進路判定結果取得ステップと、
前記進路判定結果取得ステップで取得した前記進路判定結果を報知する報知ステップとを含んでいることを特徴とする進路報知装置の制御方法。
【請求項12】
情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得手段と、
前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定手段と、
前記進路判定手段によって判定された進路判定結果を送信する進路判定結果送信手段とを備えていることを特徴とする判定結果送信装置。
【請求項13】
前記情報取得手段が取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方向の先に存在する物体を特定する指示物特定手段と、
前記指示物特定手段によって特定された物体に関する物体情報を取得して表示部に表示する表示制御手段とを備えていることを特徴とする請求項12に記載の判定結果送信装置。
【請求項14】
前記進路判定結果送信手段は、前記表示部への表示が可能となっている場合には、前記進路判定結果を送信しないことを特徴とする請求項13に記載の判定結果送信装置。
【請求項15】
自装置の姿勢が、前記表示部における表示をユーザが視認できる姿勢であるか否かの判定を行なう姿勢判定手段を備えており、
前記表示制御手段は、前記姿勢判定手段によって自装置の姿勢が前記ユーザが視認できる姿勢であると判定された場合に、前記物体情報を表示することを特徴とする請求項13又は14に記載の判定結果送信装置。
【請求項16】
前記姿勢判定手段は、鉛直方向と前記表示部における表示面の法線方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することを特徴とする請求項15に記載の判定結果送信装置。
【請求項17】
前記姿勢判定手段は、水平方向と前記表示部における表示の左右方向とのなす角が、所定の角度範囲内である場合に前記ユーザが視認できる姿勢であると判定することを特徴とする請求項16に記載の判定結果送信装置。
【請求項18】
水平方向と前記姿勢情報に基づいて決定された装置方向とのなす角が、所定の俯角の範囲内であるか否かを判定する角度判定手段と、
前記表示制御手段は、前記角度判定手段によって前記所定の俯角の範囲内であると判定された場合に、前記物体情報に替えて前記物体情報に対応する物体を含む地図情報を表示することを特徴とする請求項13から17までのいずれか1項に記載の判定結果送信装置。
【請求項19】
情報取得装置の位置を示す位置情報及び姿勢を示す姿勢情報を当該情報取得装置から取得する情報取得ステップと、
前記情報取得ステップで、取得した前記位置情報及び前記姿勢情報に基づいて決定された、現在位置におけるユーザの指示方位が、所定の進路に沿う方向であるか否かの判定を行なう進路判定ステップと、
前記進路判定ステップで、判定された進路判定結果を送信する進路判定結果送信ステップとを含んでいることを特徴とする判定結果送信装置の制御方法。
【請求項20】
請求項12から18までのいずれか1項に記載の判定結果送信装置における各手段としてコンピュータを動作させるための判定結果送信プログラム。
【請求項21】
請求項20に記載の判定結果送信プログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項22】
請求項8に記載の進路報知装置を情報取得装置として含むとともに、請求項12から18までのいずれか1項に記載の判定結果送信装置を含んでいることを特徴とする指示方向案内システム。
【図1】



【図2】
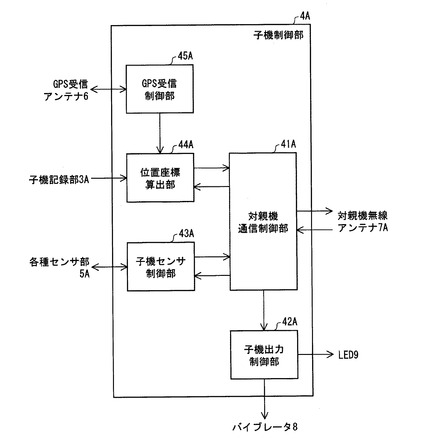
【図3】
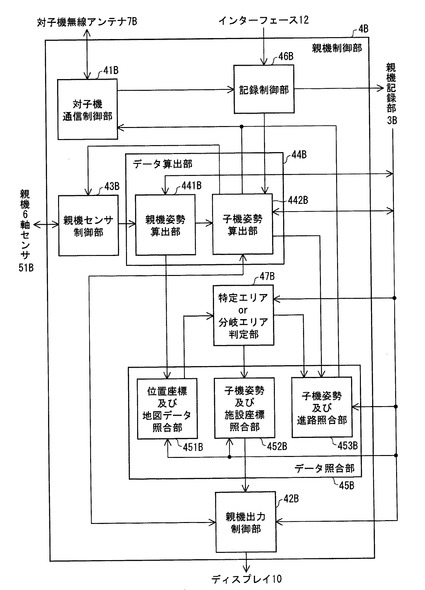
【図4】
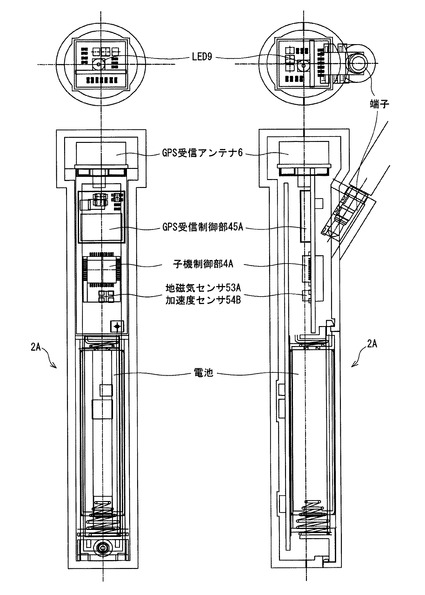
【図5】

【図6】
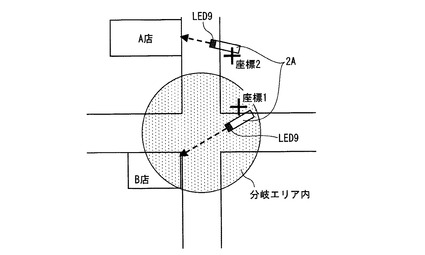
【図7】
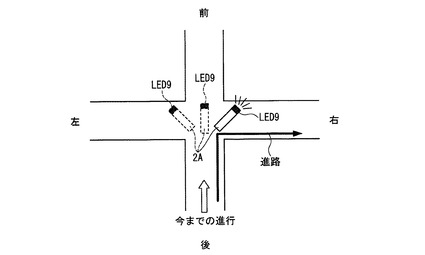
【図8】
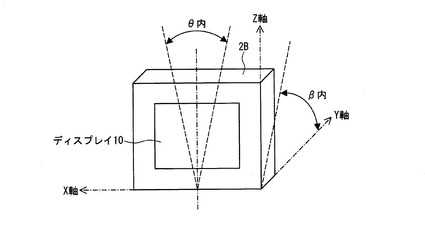
【図9】
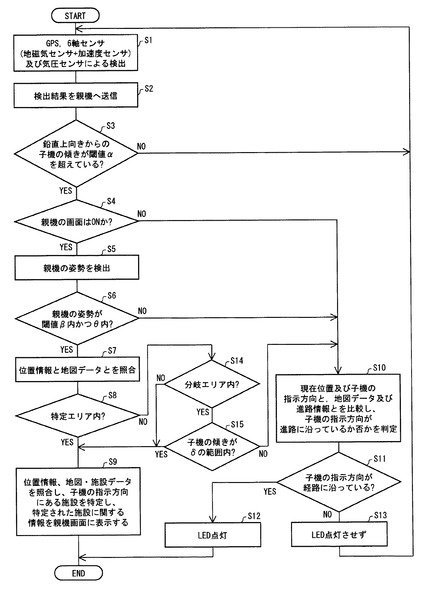
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−60423(P2010−60423A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−226175(P2008−226175)
【出願日】平成20年9月3日(2008.9.3)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月3日(2008.9.3)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]