
遅延時間推定装置及び測位装置及び遅延時間推定方法
【課題】例えば、高感度測位のための演算における処理効率を向上させることを目的とする。
【解決手段】積分処理部118は、符号系列の組み合わせを用いて変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、遅延信号とGPS信号との相関を積分時間tとする積分演算により算出する。相関値レベル判定部112は積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定する。相関Xの最大値が所定の値未満の場合、積分時間設定部113は相関Xの最大値と所定の値との差に基づきyを設定し、遅延時間推定部111は積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間を出力する。一方、相関Xの最大値が所定の値以上の場合、遅延時間推定部111は相関Xが最大値となる遅延時間を出力する。
【解決手段】積分処理部118は、符号系列の組み合わせを用いて変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、遅延信号とGPS信号との相関を積分時間tとする積分演算により算出する。相関値レベル判定部112は積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定する。相関Xの最大値が所定の値未満の場合、積分時間設定部113は相関Xの最大値と所定の値との差に基づきyを設定し、遅延時間推定部111は積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間を出力する。一方、相関Xの最大値が所定の値以上の場合、遅延時間推定部111は相関Xが最大値となる遅延時間を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遅延時間推定装置及び測位装置及び遅延時間推定方法に関するものである。本発明は、特に、衛星からのGPS(全地球測位システム)信号を受信して受信位置を正確に検出するGPS測位装置に関するものである。
【背景技術】
【0002】
従来のGPS測位装置において、衛星からのGPS信号はオープンスカイの環境に受信アンテナを設置した本部サーバと、当該本部サーバと有線又は無線の通信媒体を介して接続されたGPS端末によって受信される。一方、GPS端末はGPS信号の受信電界が良好であれば自らGPS信号から航法データを抽出し、受信電界が良好でなければ本部サーバから必要な航法データを受け取る。そして、GPS端末はGPS信号系列(C/Aコード)を任意の位置で航法データの長さで分断し、各分断したC/Aコードの同一ビット位置の値を累積加算し、この累積加算結果を自己が検出した航法データあるいは本部サーバから受け取った航法データに基づいて極性を合わせて加算することで積み上げる(以下、この演算操作をコヒーレント積分と呼ぶ)。さらに、GPS端末はこの加算結果とGPS端末自身が有する全衛星のC/Aコードとの間で相関計算を行い、相関値が最大になる点を加算開始位置として求め、C/Aコードを加算することにより擬似距離を算出する。この擬似距離と上記抽出した航法データとによって位置計算を行う。このように、従来のGPS測位装置では、受信電界が弱い場合には外部から航法データを取得してコヒーレント積分を行う。これにより、弱いGPS受信波しか受信できない室内のような環境でも測位が可能になる(例えば、特許文献1参照)。
【0003】
また、他のGPS測位装置において、衛星からのGPS信号を受信して増幅および復調を行う受信手段と、この受信手段によって復調された信号をA/D変換するA/D変換手段と、符号系列の全ての組み合わせを生成するコード生成手段と、前記衛星に対応するスペクトル拡散コードを発生するスペクトル拡散コード発生手段と、前記符号系列によって前記第1のスペクトル拡散コードを変調する乗算手段と、この乗算手段により変調されたスペクトル拡散コードを時間長0から前記符号系列の1ビットに相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延手段と、この遅延手段によって生成された遅延信号と前記A/D変換手段によってA/D変換された信号との相関処理を行う相関処理手段と、前記相関処理の結果の中で最大の相関値に対応する遅延時間を出力する遅延時間推定手段と、この遅延時間推定手段から出力された遅延時間に基づいて対応する衛星と自分との距離を算出し、この距離に基づき自分の現在の位置を算出する測位計算手段とが備えられている。このように、GPS測位装置に航法データ系列の全ての組み合わせを自動生成する手段と、上記従来のGPS測位装置に準じるようなコヒーレント積分を実行する手段を設けて、GPS信号の受信感度が弱い室内であっても、外部から航法データを取得することなく、高感度のGPS測位を実現することができる(例えば、特許文献2参照)。
【特許文献1】特開2001−349935号公報(第7頁、図1)
【特許文献2】特開2005−321301号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来のGPS測位装置では、高感度のGPS測位を実現するために航法データを別途無線データリンクなどを通じて外部のインフラ側から受信する必要がある。このため、例えば、無線データリンクが確実に接続できる範囲でしか高感度測位が実現できないという課題があった。また、データリンク、航法データ観測のためのインフラ構築、又はインフラサービス利用に、別途コストがかかるという課題もあった。さらには、GPS測位装置に、無線データリンク受信機やアンテナを別途装着する必要があり、測位装置が大型かつ重くなって携帯に不便となったり、装置コストが高くなったり、消費電力増大による電池交換頻度が増えたりするという課題があった。
【0005】
上記他のGPS測位装置は、これらの課題を解決するものであったが、さらに高感度測位のための演算における処理効率を向上させる必要性があった。
【0006】
本発明は、例えば、高感度測位のための演算における処理効率を向上させることを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る遅延時間推定装置は、
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記積分時間t=y(x<y)として前記積分処理部に相関Yを算出させ、前記相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする。
【発明の効果】
【0008】
本発明では、遅延時間推定装置において、相関値レベル判定部が、積分時間t=x(0<x)として積分処理部に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部が、相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部に相関Yを算出させ、相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態について、図を用いて説明する。
【0010】
実施の形態1.
図1は、本発明の実施の形態1によるGPS測位装置の構成を説明するブロック図である。
【0011】
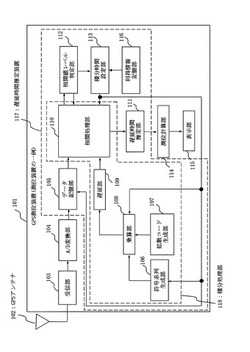
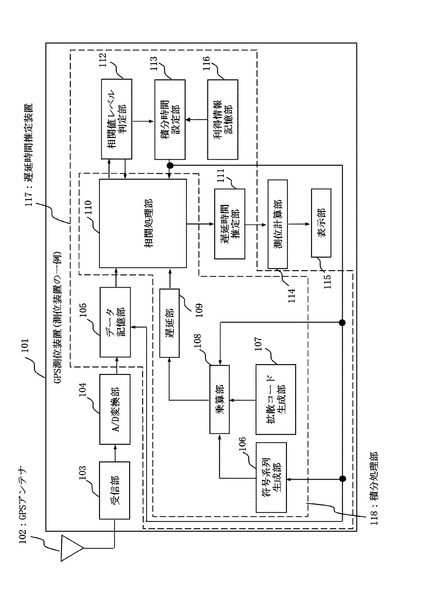
図1において、GPS測位装置101(測位装置の一例)はGPS衛星(測位衛星の一例)を利用した測位を行う。GPS測位装置101は、GPSアンテナ102、受信部103、A/D変換部104(アナログ/デジタル変換部)、遅延時間推定装置117、測位計算部114、表示部115を備える。GPSアンテナ102はGPS衛星からのGPS信号(航法信号の一例)を受信し、受信部103はこのGPSアンテナ102で受信したGPS信号の増幅や復調などを行う。A/D変換部104は受信部103からのアナログデータをデジタルデータに変換(A/D変換)する。遅延時間推定装置117は、A/D変換されたGPS信号のデータから遅延時間を推定し、この遅延時間を測位計算部114に送る。測位計算部114は遅延時間推定装置117から送られてきた遅延時間から衛星との擬似距離を計算し、この擬似距離を基に現在位置を計算する。表示部115は測位計算部114によって計算された現在の位置から現在地を表示する。
【0012】
遅延時間推定装置117は、データ記憶部105、積分処理部118、遅延時間推定部111、相関値レベル判定部112、積分時間設定部113、利得情報記憶部116を備える。データ記憶部105はA/D変換部104によりA/D変換されたデータを記憶する。積分処理部118は、符号系列の組み合わせを生成し、生成した符号系列を用いてGPS衛星に対応する拡散コードを変調する。そして、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号(このときの遅延時間をτで表す)を生成し、生成した遅延信号とデータ記憶部105により記憶されたGPS信号との相関を積分時間tとする積分演算により算出する。ここで、積分演算とは前述したコヒーレント積分のことであるが、積分時間がC/Aコード1個分(1ミリ秒)の場合も含むものとする。相関値レベル判定部112は積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定する。x=1ミリ秒又は数ミリ秒が望ましい。詳細については後述するが、例えば積分時間t=1ミリ秒とした場合、積分処理部118は符号系列の組み合わせとして、“0”と“1”の少なくともいずれかを生成し(符号が1個の場合も符号系列というものとする)、生成した符号系列のそれぞれについて積分演算をして相関Xを算出する。そして、相関値レベル判定部112はこの相関Xの最大値が所定の値未満であるかを判定する。積分時間設定部113は、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、相関Xの最大値と所定の値との差に基づきコヒーレント積分する時間yを設定する。このとき、積分時間設定部113は予め利得情報記憶部116に記憶されているテーブル(このテーブルにはyの値と利得との対応関係を示す利得情報が記憶されている)から最大相関値に対応したコヒーレント積分する時間を設定してもよい(相関Xの最大値から所定の値を達成するために必要な利得を求め、その利得に対応するyの値を得る)。遅延時間推定部111は、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間τを遅延時間τmaxとして出力する。例えばy=80ミリ秒と設定された場合、積分時間t=80ミリ秒となり、積分処理部118は80ミリ秒に相当する80個の符号からなる符号系列の組み合わせ(例えば、“000‥‥00”、“000‥‥01”)を生成し、生成した符号系列のそれぞれについて積分演算をして相関Yを算出する。そして、遅延時間推定部111はこの相関Yが最大値となる遅延時間τmaxを出力する。一方、遅延時間推定部111は、相関値レベル判定部112により相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間τを遅延時間τmaxとして出力する。
【0013】
本実施の形態では、相関値レベル判定部112が相関Xの最大値が所定の値「未満」であるかを判定するが、相関値レベル判定部112が相関Xの最大値が所定の値「以下」であるかを判定してもよい。この場合、積分時間設定部113は、相関値レベル判定部112により相関Xの最大値が所定の値以下であると判定された場合にyを設定し、遅延時間推定部111は積分時間t=yとして積分処理部118に相関Yを算出させる。また、本実施の形態では、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、積分時間設定部113が相関Xの「最大値と所定の値との差に基づき」yを設定するが、遅延時間推定部111が「任意の」yを設定してもよい(例えば、yは予め決められた固定値であってもよい)。また、本実施の形態では、遅延時間推定部111が相関X又はYが「最大値」となる遅延時間τmaxを出力するが、遅延時間推定部111が積分時間t=yとして積分処理部118に相関Yを算出させ、相関Yが「所定の値以上」となる遅延時間を出力してもよい。この場合、積分時間設定部113は積分処理部118に相関Xを算出させ、相関Xの最大値と所定の値との差に基づきyの値を設定する。
【0014】
積分処理部118には、符号系列生成部106(コード生成部)、拡散コード生成部107(スペクトル拡散コード発生部)、乗算部108、遅延部109が含まれる。符号系列生成部106は符号系列の全ての組み合わせパターン(後述するように、全ての組み合わせでなくてもよい)を生成する。この符号系列は1個以上の符号からなる。拡散コード生成部107は上記GPS衛星に対応する(衛星ごとの)スペクトル拡散コード(スペクトラム拡散コード)を生成する。乗算部108は符号系列生成部106が生成した符号系列と拡散コード生成部107が生成したスペクトル拡散コードを乗算する。即ち、乗算部108は符号系列生成部106が生成した符号系列を用いて拡散コード生成部107が生成した拡散コードを変調する。遅延部109は乗算部108により処理されたスペクトル拡散コードを遅延時間τだけ遅延させる。即ち、遅延部109は乗算部108により変調された拡散コードを時間長0から符号系列の1個の符号に相当する時間長(1ミリ秒=1023チップ)まで所定の時間単位(1チップ)で順次遅延させた遅延信号を生成する。相関処理部110はデータ記憶部105に保持されているGPS受信信号と遅延部109で処理されたスペクトル拡散コード(遅延信号)との相関処理(相関を算出する処理)を行う。遅延時間推定部111は相関処理部110から送られてきた相関処理の結果(相関X)と遅延時間τを保持し相関処理の結果が最大となる遅延時間τmaxを算出する。相関値レベル判定部112はこの相関処理結果の中の最大相関値が所定の値より高いかもしくは同じ又は低いかを判定する。積分時間設定部113は相関値レベル判定部112で最大相関値が所定の値より低いと判定されたときに、予め利得情報記憶部116に記憶されているテーブルから最大相関値に対応したコヒーレント積分する時間yを設定する。そして、相関Xを算出する処理と同様に、遅延時間推定部111は相関処理部110から送られてきた相関処理の結果(相関Y)と遅延時間τを保持し相関処理の結果が最大となる遅延時間τmaxを算出する。
【0015】
なお、図1には記載されていないが、このGPS測位装置101を全体的に制御する制御部があり、データ記憶部105、符号系列生成部106、拡散コード生成部107、乗算部108、遅延部109、相関処理部110、遅延時間推定部111、相関値レベル判定部112、積分時間設定部113、測位計算部114、表示部115、利得情報記憶部116とシステムバスなどを介して接続されており、これらの各部を制御する。この制御部の一例として、ROM(Read・Only・Memory)やEEPROM(Electronically・Erasable・Programmable・Read・Only・Memory)などに格納した制御用プログラムにより計算機のCPU(Central・Processing・Unit)やDSP(Digital・Signal・Processor)を動作させるようにしてもよい。ただし、以下においては説明を簡潔にするために、データ記憶部105、符号系列生成部106などの各部が自らデータ処理を実行するものとする。
【0016】
また、上述の表示部115は、例えばCRT(Cathode・Ray・Tube)、LCD(液晶ディスプレイ)、液晶パネルなどであるが、プリンタ装置、外部記憶装置、他の信号処理装置、他の演算装置などへの出力を行う通信ボードなどの他の出力部であってもよい。また、上述のデータ記憶部105や利得情報記憶部116は、RAM(Random・Access・Memory)などの揮発性メモリでもよいし、ROM、FDD(Flexible・Disk・Drive)、CDD(Compact・Disc・Drive)、磁気ディスク装置などの不揮発性メモリでもよい。また、GPS測位装置101は、外部から情報、信号、データなどを入力するキーボード(K/B)、マウス、通信ボードなどの入力部を備えていてもよい。
【0017】
ROMや磁気ディスク装置などの不揮発性メモリには、オペレーティングシステム(OS)、プログラム群、ファイル群が記憶されている。プログラム群のプログラムは、CPU、オペレーティングシステム、ウィンドウシステムにより実行される。プログラム群には、本実施の形態の説明において「〜部」、「〜手段」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPUにより読み出され実行される。また、ファイル群には、本実施の形態の説明において、「〜データ」、「〜情報」、「〜ID(IDentification)」、「〜フラグ」、「〜結果」として説明するデータや情報や信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」や「〜テーブル」の各項目として記憶されている。「〜ファイル」や「〜データベース」や「〜テーブル」は、ディスクやメモリなどの記憶媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶されたデータや情報や信号値や変数値やパラメータは、読み書き回路を介してCPUによりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・制御・出力・印刷・表示などのCPUの処理(動作)に用いられる。抽出・検索・参照・比較・演算・計算・制御・出力・印刷・表示などのCPUの処理中、データや情報や信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
【0018】
また、本実施の形態の説明において説明するブロック図やフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号は、RAMなどのメモリ、FDDのフレキシブルディスク(FD)、CDDのコンパクトディスク(CD)、磁気ディスク装置の磁気ディスク、その他光ディスク、ミニディスク(MD)、DVD(Digital・Versatile・Disc)などの記録媒体に記録される。また、データや信号は、バスや信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0019】
また、本実施の形態の説明において「〜部」、「〜手段」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜工程」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」、「〜手段」として説明するものは、ROMに記憶されたファームウェアで実現されていても構わない。あるいは、ソフトウェアのみ、あるいは、素子・デバイス・基板・配線などのハードウェアのみ、あるいは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実現されていても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVDなどの記録媒体に記憶される。このプログラムはCPUにより読み出され、CPUにより実行される。即ち、プログラムは、本実施の形態の説明で述べる「〜部」、「〜手段」としてコンピュータを機能させるものである。あるいは、本実施の形態の説明で述べる「〜部」、「〜手段」の手順や方法をコンピュータに実行させるものである。
【0020】
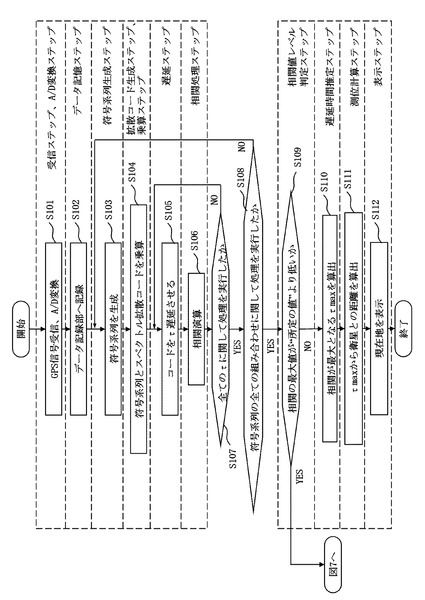
次に全体の動作について説明する。図2は、GPS測位装置101の動作(図示しない制御部によって実行される処理プログラム)を示す概略のフローチャートである。前述したように、このプログラムは制御部のROMなどのメモリに予め記憶されていてもよいが、プログラム自体を装置とは独立に存在するものとし、FDやCDなどの外部記憶媒体、又はインターネットなどの通信回線を介して、書き込み可能なメモリにインストールするようにしてもよい。この場合には、GPS測位装置101のプログラムの発明として成立する。
【0021】
GPS測位装置101では、まず受信ステップにおいて、GPSアンテナ102がGPS信号を受信し、受信部103が増幅や周波数の変換などの処理を行った後、A/D変換ステップにおいて、A/D変換部104がA/D変換を行ってデジタルデータに変換する(ステップS101)。データ記憶ステップにおいて、A/D変換されたデータはデータ記憶部105に記録される(ステップS102)。
【0022】
1ミリ秒の長さのデータがデータ記憶部105に記録されると、符号系列生成ステップにおいて、符号系列生成部106は1ミリ秒の長さの符号系列を生成し乗算部108に送る(ステップS103)。拡散コード生成ステップにおいて、拡散コード生成部107は衛星ごとのスペクトル拡散コードを生成し、乗算ステップにおいて、乗算部108は、拡散コード生成部107から衛星ごとのスペクトル拡散コードを取得し、符号系列生成部106から送られてきた符号系列によって変調し、変調されたスペクトル拡散コードを遅延部109に送る(ステップS104)。
【0023】
遅延ステップにおいて、遅延部109は、乗算部108によって変調されたスペクトル拡散コードを、時間τだけ遅延させて相関処理部110に送る(ステップS105)。相関処理ステップにおいて、相関処理部110は、データ記憶部105からGPS受信信号を読み出し、遅延部109から送られてきた時間τだけ遅延されたスペクトル拡散コードとの相関処理を行い、演算結果を遅延時間推定部111に送る。遅延時間推定部111は、送られてきた相関処理の結果と対応する遅延時間τを内部に保持する(ステップS106)。
【0024】
遅延部109は、変調されたスペクトル拡散コードを時間長0から符号系列の1コードに相当する最大時間長さの遅延信号に関しての相関演算が処理されるまで、時間τずつ遅延されたスペクトル拡散コードを順次生成する(ステップS107)。また、符号系列生成部106は符号系列の全ての組み合わせに関しての相関演算が処理されるまで、符号系列を順次生成する(ステップS108)。これらの全ての組み合わせに関して、相関処理部110は相関演算処理を行う。
【0025】
相関値レベル判定ステップにおいて、相関値レベル判定部112は1ミリ秒の相関(相関X)の最大値が上記所定の値より高いかもしくは同じ又は低いかを判定する。相関の最大値が上記所定の値より高いかもしくは同じときは、ステップS110の処理へ進む。一方、1ミリ秒の相関の最大値が上記所定の値より低いときは、積分時間設定部113へ1ミリ秒の相関の最大値を送り、後述する図7のステップS201の処理へ進む(ステップS109)。
【0026】
遅延時間推定ステップにおいて、遅延時間推定部111は、算出された全ての相関処理結果(相関X)の中から最大値を選び、その値に対応する遅延時間をτmaxとして測位計算部114へ送る(ステップS110)。測位計算ステップにおいて、測位計算部114は、遅延時間τmaxから対応するGPS衛星とGPS測位装置101の擬似距離を算出する。GPS測位装置101の制御部は、上記と同様の処理を繰り返すことにより、複数のGPS衛星からGPS測位装置101までの距離を求める。これらの距離情報から、GPS測位装置101の現在位置を算出する(ステップS111)。
【0027】
表示ステップにおいて、表示部115は測位計算部114で算出された現在位置を出力し、現在位置を表示する(ステップS112)。GPS測位装置101は、以上の動作によりGPS衛星を利用した位置測定を行う。
【0028】
次に、符号系列生成部106、拡散コード生成部107、乗算部108、遅延部109相関処理部110、遅延時間推定部111の動作について説明する。図3は、GPS信号のフォーマットを表したものである。
【0029】
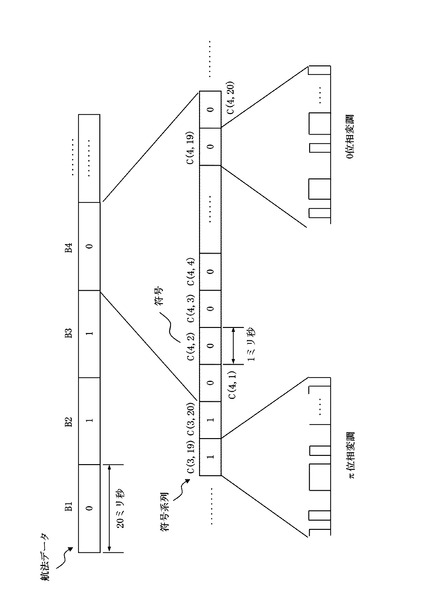
GPS信号は、図3のように任意の航法データビットBi(i=1,2,3,・・・,n)に対して内部が1023チップのスペクトル拡散変調された周期1ミリ秒のコード(以下、スペクトル拡散コードC(i,1),C(i,2),・・・,C(i,20)として示す)単位で、航法データの1ビット分のBiを形成している。したがって、スペクトル拡散コードC(i,1),C(i,2),・・・,C(i,20)は全て“1”又は全て“0”のいずれかである。また、図3のBi、C(i,1),C(i,2),・・・,C(i,20)の“1”又は“0”の記号はそれぞれπ又は0位相変調されていることを意味する。なお、B1〜Bnの航法データビット列にはGPS衛星位置などの航法メッセージが書き込まれている。また、1ミリ秒=1周期のスペクトル拡散コードの中に1023チップのデータがあり、1チップは“1”もしくは“0”の信号である。実際のGPS信号の処理では、1023チップのデータを取得する際に標本化の定理より2倍以上のサンプリング周波数でデータを標本化する。以下では、単純化のためチップ単位を基準に説明を行うこととし、1チップ=“0”又は“1”として扱うものとする。
【0030】
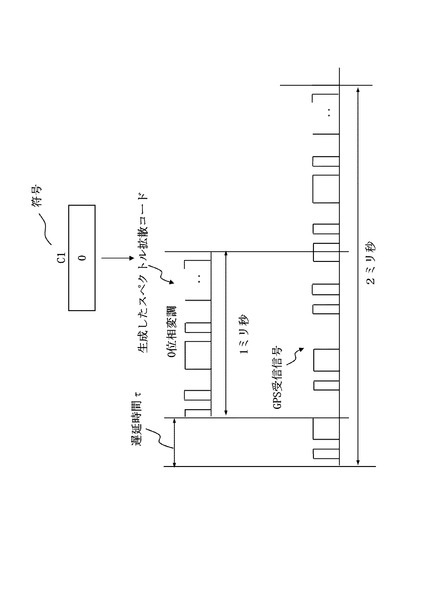
ここでは、1ミリ秒(スペクトラム拡散コード1個分)のデータサイズについて説明する。図4は、本発明の実施の形態1における1ミリ秒のGPS受信信号と生成されるコードとの相関処理の方法を示したものである。データ記憶部105は、GPS信号を保存する。このとき、処理するデータサイズより1ミリ秒だけ長い、2ミリ秒のGPS信号が記録された時点で、相関演算の処理が開始される。ここで、2ミリ秒にしているのは、途切れのないC/Aコードを周波数シフトさせて相関演算を行う際に有効であるためである。
【0031】
符号系列生成部106は、図4のC1のような1コードの符号系列を生成する。
【0032】
次に、乗算部108は、拡散コード生成部107から1ミリ秒の長さのスペクトル拡散コードを取り出し符号系列生成部106で生成した符号系列C1で位相変調を行う。Cnの値が“1”の場合はπ位相変調を行い、“0”の場合は0位相変調を行う。
【0033】
次に、遅延部109は、乗算部108が作成したスペクトル拡散コードを遅延時間τだけシフトする。ここでは、単純に遅延時間τは1チップ単位(1/1023ミリ秒)の長さとして、0秒から1022/1023ミリ秒までの値とする。このとき、遅延部109は1チップずつ1022回シフトを行う。
【0034】
相関処理部110は、データ記憶部105に記録されている2ミリ秒の長さのGPS受信データを取り出す。次に、遅延部109から送られてくる1ミリ秒のスペクトル拡散コードとこのスペクトル拡散コードに対応するGPS受信信号の領域との相関処理を行う。遅延時間推定部111は、相関処理部110の結果とそれに対応する遅延時間τを記録する。
【0035】
相関処理部110は、符号系列の全ての組み合わせと0〜1022/1023ミリ秒の遅延時間τとの全ての組み合わせに対して相関処理を行う。相関値レベル判定部112は、この相関処理結果(相関X)の中の最大相関値が所定の値より高いかもしくは同じ又は低いかを判定する。所定の値より高いかもしくは同じ場合は、遅延時間推定部111は、相関値が最大となったときの遅延時間τをτmaxとして測位計算部114へ送る。
【0036】
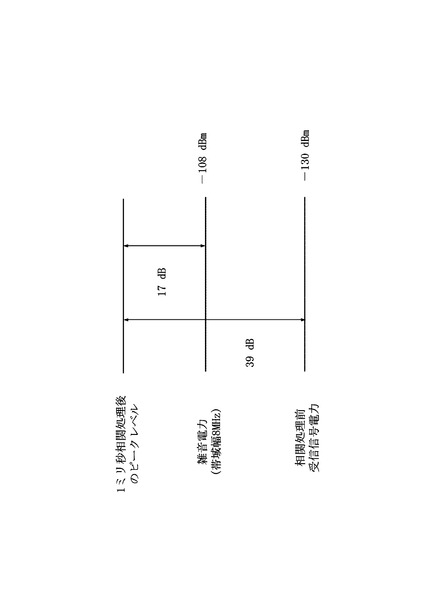
ここで上記「所定の値」について説明する。例えばオープンスカイの環境にある場合に相関処理前の受信信号電力は一般的に−130[dBm]程度である。また、GPS受信機の帯域幅が8MHzの場合、1ミリ秒相関処理後の利得は雑音帯域幅が8MHzから1KHzに制限されるため以下の値となる。
1ミリ秒相関処理による利得=10×log(8×106÷103)=39[dB]
また、1ミリ秒相関処理後のピーク値対ノイズ値(以下、P/Nと記す)は17[dB]程度であり、このときの1ミリ秒相関処理後の雑音電力は以下の値となる。
1ミリ秒相関処理後の雑音電力=−130+39−17=−108[dBm]
例えば、上記雑音電力のときに必要となるP/N=17[dB]となる値を所定の値とする。図5に受信信号電力、雑音電力、相関演算後のピークレベルの関係を示す。
【0037】
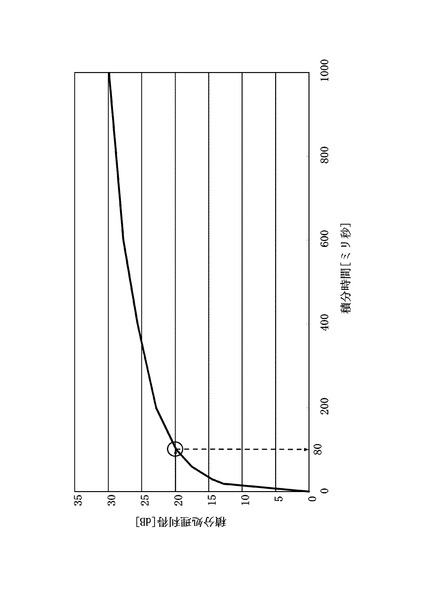
図6は、本発明の実施の形態1におけるコヒーレント積分の積分時間と積分処理利得の関係の一例を示す図である。
【0038】
相関値レベル判定部112は、相関処理部110による相関処理の結果(相関X)の中の最大相関値が所定の値より低い場合は、積分時間設定部113へ相関値を送る。積分時間設定部113は、予め内部にあるテーブルから積分処理利得に対応した後述のコヒーレント積分する時間tを設定する。このテーブルには図6に示すような必要な利得を稼ぐための積分時間との関係を記録したデータ(利得情報)を持っており、所定の値と相関値との差の利得に応じて積分時間の決定できるようにしている。例えば、室内などにおいて受信信号電力が−150[dBm]の場合の雑音電力は、−128[dBm]となるので、上記所定の値のP/Nにするためには、20dBの利得が必要となる。そのときには、図6に示すように80ミリ秒の積分時間を設定して所定のP/Nになるようにする。なお、図6では、相関値の代わりにコヒーレント積分処理による相対的な利得増加を縦軸に表しているが、これは積分時間による相関値の増加を表しているのと同じである。また、GPS受信機の帯域が異なる場合は、雑音帯域幅による1ミリ秒相関処理後の利得が異なるため、所定の値となるP/Nは異なる値となる。また、所定の値として、より高い利得が得られる積分時間を設定してもよい(ただし、処理のリアルタイム性とのトレードオフになる)。
【0039】
ここで設定された積分時間tは、データ記憶部105、符号系列生成部106、乗算部108、相関処理部110へ送られ、積分時間に相当するデータサイズの処理が行われる。
【0040】
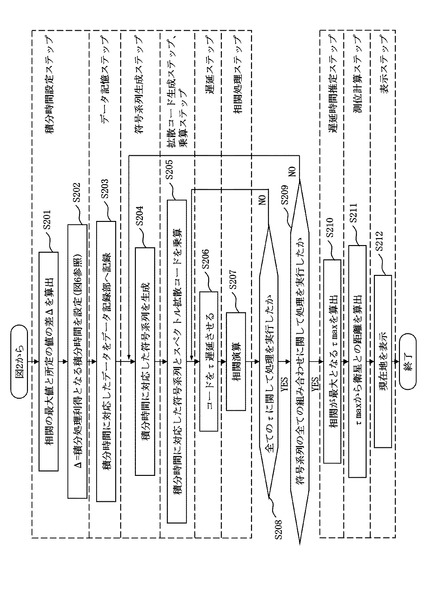
図7は、積分時間tに相当するデータサイズの処理を行う際のGPS測位装置101の動作(図示しない制御部によって実行される処理プログラム)を示す概略のフローチャートである。図2に示すステップS109において、相関値レベル判定部112が1ミリ秒の相関(相関X)の最大値が所定の値より低いと判定したときに、図7の処理フローが開始される。
【0041】
相関値レベル判定部112は、1ミリ秒の相関の最大値が上記所定の値より低いときは、積分時間設定部113へ1ミリ秒の相関の最大値を送る。積分時間設定ステップにおいて、積分時間設定部113は1ミリ秒の相関の最大値と所定の値の差を算出し(ステップS201)、例えば図6に示した利得情報(利得とその利得に対応する積分時間との複数の組み合わせ)を保持するテーブルを基に、その差に相当する積分処理利得を得るために必要となる積分時間tを設定する(ステップS202)。データ記憶ステップにおいて、ここで設定された積分時間に対応したデータがデータ記憶部105へ記録される(ステップS203)。次に符号系列生成ステップにおいて、符号系列生成部106は積分時間に対応した符号系列を生成し、乗算部108へ送る(ステップS204)。
【0042】
拡散コード生成ステップにおいて、拡散コード生成部107は衛星ごとのスペクトル拡散コードを生成し、乗算ステップにおいて、乗算部108は、拡散コード生成部107から衛星ごとのスペクトル拡散コードを取得し、符号系列生成部106から送られてきた符号系列によって変調し、変調されたスペクトル拡散コードを遅延部109に送る(ステップS205)。
【0043】
遅延ステップにおいて、遅延部109は、乗算部108によって変調されたスペクトル拡散コードを、時間τだけ遅延させて相関処理部110に送る(ステップS206)。相関処理ステップにおいて、相関処理部110は、データ記憶部105からGPS受信信号を読み出し、遅延部109から送られてきた時間τだけ遅延されたスペクトル拡散コードとの相関処理を行い、演算結果と対応する遅延時間τを内部に保持する(ステップS207)。
【0044】
遅延部109は、変調されたスペクトル拡散コードを時間長0から符号系列の1コードに相当する最大時間長さの遅延信号に関しての相関演算が処理されるまで、時間τずつ遅延されたスペクトル拡散コードを順次生成する(ステップS208)。また、符号系列生成部106は、符号系列の全ての組み合わせに関しての相関演算が処理されるまで、符号系列を順次生成する(ステップS209)。これらの全ての組み合わせに関して、相関処理部110は相関演算処理を行う。
【0045】
遅延時間推定ステップにおいて、遅延時間推定部111は、算出された全ての相関処理結果(相関Y)から最大値を選び、その値に対応する遅延時間をτmaxとして測位計算部114へ送る(ステップS210)。測位計算ステップにおいて、測位計算部114は、遅延時間τmaxから対応するGPS衛星とGPS測位装置101の擬似距離を算出する。上記と同様の処理を繰り返すことにより、複数のGPS衛星からGPS測位装置101までの距離を求める。これらの距離情報から、GPS測位装置101の現在位置を算出する(ステップS211)。
【0046】
表示ステップにおいて、表示部115は測位計算部114で算出された現在位置を出力し、現在地を表示する(ステップS212)。GPS測位装置101は、以上の動作によりGPS衛星を利用した位置測定を行う。
【0047】
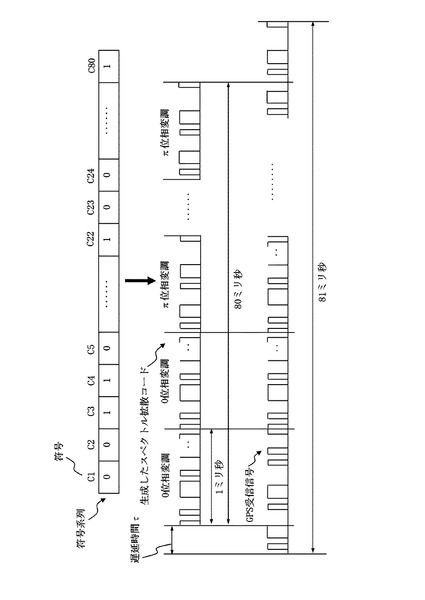
次にコヒーレント積分を行う場合のGPS測位装置101の詳細な動作について説明する。ここでは、積分時間設定部113により、積分時間tが80ミリ秒に設定されたとして、80ミリ秒(スペクトル拡散コード80個分)のデータサイズを例に説明する。図8は、本発明の実施の形態1における80ミリ秒のコヒーレント積分実行時のGPS受信信号と生成されるコードとの相関処理の方法を示したものである。データ記憶部105がGPS信号を保存するとき、処理するデータサイズより1ミリ秒だけ長い、81ミリ秒のGPS信号が記録された時点で、相関演算の処理が開始される。
【0048】
符号系列生成部106は、図8のC1〜C80のような80個のコードの符号系列を生成する。このとき、従来技術と同様に、符号系列生成部106は全てのコードを生成する必要はない(先に説明したように、全てのコードを生成してもよい)。例えば、符号系列生成部106は、全てのコードが“0”の“000・・・00”という80個のコードから最初のコードのみ“0”で他は全て“1”の“011・・・11”という80個のコードまでの全てのコードを生成する。一方、最初のコードが“1”である“100‥‥00”から“111‥‥11”のコードは生成しない。これは、これらのコードから得られるコヒーレント積分の結果が、これらのコードの位相反転(ビット反転)したコードで行うコヒーレント積分の結果と極性が逆なだけで全く等価であるため、相関処理では不要となるからである。
【0049】
次に、乗算部108は、拡散コード生成部107から1ミリ秒の長さのスペクトル拡散コードを取り出し、符号系列生成部106で生成した符号系列C1〜C80で位相変調を行う。Cnの値が“1”の場合はπ位相変調を行い、“0”の場合は0位相変調を行う。このようにして、80ミリ秒の長さのスペクトル拡散コードを生成する。
【0050】
次に、遅延部109は、乗算部108が作成したスペクトル拡散コードを遅延時間τだけシフトする。前述した1ミリ秒相関処理のときと同様に、ここでは、単純に遅延時間τは1チップ単位(1/1023ミリ秒)の長さとして、0秒から1022/1023ミリ秒までの値とする。このとき、遅延部109は1チップずつ1022回シフトを行う。
【0051】
相関処理部110は、データ記憶部105に記録されている81ミリ秒の長さのGPS受信データを取り出す。次に、遅延部109から逐次送られてくる80ミリ秒のスペクトル拡散コードと、このスペクトル拡散コードに対応するGPS受信信号の領域との相関処理を行う。遅延時間推定部111は、相関処理部110の結果とそれに対応する遅延時間τを記録する。
【0052】
相関処理部110は、符号系列の全ての組み合わせと0〜1022/1023ミリ秒の遅延時間τとの全ての組み合わせに対して相関処理を行う。遅延時間推定部111は、この相関処理の結果(相関Y)の中で相関が最大となる遅延時間τをτmaxとして測位計算部114に送る。
【0053】
以上のように、この実施の形態1によれば、符号系列生成部106によって、全ての組み合わせの符号系列から作られるスペクトル拡散コードに対して相関演算処理を行うことによりコヒーレント積分処理後に所定の値以上となったGPS信号との相関値が最大となる遅延時間τmaxを算出することが可能となり、精度の良い遅延時間を検知できるため、例えば、室内などにおける1ミリ秒の相関演算処理を行うことにより得られる所定の値より低いGPS信号であっても、自律で航法データの復号が可能となり、外部からの無線データリンクなどによる航法データを取得せずに、GPSによる測位が行えるという効果が得られる。また、外部から航法データを取得するためのアンテナ、受信装置などを必要としないため、装置の軽量化や製品のコスストダウンを図ることが可能になるという効果が得られる。また、受信感度に応じて、積分時間を設定するので、例えば室内から室外へ出た時などに起こる受信感度の急激な変化に対してリアルタイムに擬似距離を算出することができ、同時にリアルタイムに測位計算の結果を出力することができる。
【0054】
本実施の形態に係る測位装置は、コヒーレント積分を実行することにより高感度GPS測位を実現することができ、かつ、受信感度に応じた積分時間を設定できるので、衛星からのGPS信号を受信して受信位置を正確にかつリアルタイムに測位するGPS測位装置の分野において有用な技術である。
【0055】
本実施の形態では、遅延時間推定装置117において、相関値レベル判定部112が、積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部111が、相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【0056】
また、遅延時間推定装置117において、積分時間設定部113が、積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値と所定の値との差に基づきy(x<y)の値を設定し、遅延時間推定部111が、積分時間t=yとして積分処理部118に相関Yを算出させ、相関Yが所定の値以上となる遅延時間を出力することにより、高感度測位のための演算における処理のリアルタイム性を向上させることが可能となる。
【0057】
また、遅延時間推定装置117において、相関値レベル判定部112が、符号系列生成部106によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出された相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部111が、相関Xの最大値が所定の値未満であると判定された場合には、符号系列生成部106によりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出される相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【0058】
また、遅延時間推定装置117において、積分時間設定部113が、符号系列生成部106によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出された相関Xの最大値と所定の値との差に基づきy(yはx<yとなる整数)の値を設定し、符号系列生成部106によりy個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出される相関Yが所定の値以上となる遅延時間を出力することにより、高感度測位のための演算における処理のリアルタイム性を向上させることが可能となる。
【0059】
また、遅延時間推定装置117において、利得情報記憶部116が、yの値と利得との対応関係を示す利得情報を予め記憶し、積分時間設定部113が、利得情報記憶部116に記憶された利得情報に基づき相関Xの最大値と所定の値との差に相当する利得と対応するyの値を設定することにより、高感度測位のための演算における処理効率をさらに向上させることが可能となる。
【0060】
以上のように、本実施の形態で説明したGPS測位装置は、
衛星からのGPS信号を受信して増幅及び復調を行う受信部と、
この受信部によって復調された信号をA/D変換するA/D変換部と、
符号系列の全ての組み合わせを生成するコード生成部と、
前記衛星に対応するスペクトル拡散コードを発生するスペクトル拡散コード発生部と、
前記符号系列によって前記スペクトル拡散コードを変調する乗算部と、
この乗算部により変調されたスペクトル拡散コードを時間長0から前記符号系列の1ビットに相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
この遅延部によって生成された遅延信号と前記A/D変換部によりA/D変換された信号との相関処理を行う相関処理部と、
この相関処理の結果の中で最大の相関値に対応する遅延時間を出力する遅延時間推定部と、
この相関処理結果の中の最大相関値が所定の値より高いか又は低いかを判定する相関値レベル判定部と、
この判定結果からコヒーレント積分の積分時間を決める積分時間設定部と、
前記遅延時間推定部から出力された遅延時間に基づいて対応する衛星と自分との擬似距離を算出し、
この擬似距離に基づき自分の位置を算出する測位計算部とを備えたことを特徴とする。
【0061】
また、前記GPS測位装置は、
前記積分時間設定部において、積分処理利得とコヒーレント積分の積分時間の関係を予めテーブルとして持つことを特徴とする。
【0062】
また、前記GPS測位装置は、
前記相関値レベル判定部において、最大相関値が所定の値より高い場合には前記積分処理部の処理をせずに前記相関処理部で得られた最大相関値を使用して遅延時間推定、擬似距離算出、位置計算の処理を実行することを特徴とする。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態1におけるGPS測位装置の構成を示すブロック図である。
【図2】本発明の実施の形態1におけるGPS測位装置の動作を示すフローチャートである。
【図3】本発明の実施の形態1におけるGPS受信信号のフォーマットを示す図である。
【図4】本発明の実施の形態1における1ミリ秒のGPS受信信号(C/Aコード)と生成されるコードとの相関処理の方法を示す図である。
【図5】本発明の実施の形態1における1ミリ秒相関処理時の受信信号電力、雑音電力、1ミリ秒相関処理後のピークレベルの関係を示す図である。
【図6】本発明の実施の形態1におけるコヒーレント積分の積分時間と積分処理利得の関係の一例を示す図である。
【図7】本発明の実施の形態1における1ミリ秒相関処理結果の相関値の最大値が所定の値より低いときのGPS測位装置の動作を示すフローチャートである。
【図8】本発明の実施の形態1における80ミリ秒のコヒーレント積分実行時のGPS受信信号と生成されるコードとの相関処理の方法を示す図である。
【符号の説明】
【0064】
101 GPS測位装置、102 GPSアンテナ、103 受信部、104 A/D変換部、105 データ記憶部、106 符号系列生成部、107 拡散コード生成部、108 乗算部、109 遅延部、110 相関処理部、111 遅延時間推定部、112 相関値レベル判定部、113 積分時間設定部、114 測位計算部、115 表示部、116 利得情報記憶部、117 遅延時間推定装置、118 積分処理部。
【技術分野】
【0001】
本発明は、遅延時間推定装置及び測位装置及び遅延時間推定方法に関するものである。本発明は、特に、衛星からのGPS(全地球測位システム)信号を受信して受信位置を正確に検出するGPS測位装置に関するものである。
【背景技術】
【0002】
従来のGPS測位装置において、衛星からのGPS信号はオープンスカイの環境に受信アンテナを設置した本部サーバと、当該本部サーバと有線又は無線の通信媒体を介して接続されたGPS端末によって受信される。一方、GPS端末はGPS信号の受信電界が良好であれば自らGPS信号から航法データを抽出し、受信電界が良好でなければ本部サーバから必要な航法データを受け取る。そして、GPS端末はGPS信号系列(C/Aコード)を任意の位置で航法データの長さで分断し、各分断したC/Aコードの同一ビット位置の値を累積加算し、この累積加算結果を自己が検出した航法データあるいは本部サーバから受け取った航法データに基づいて極性を合わせて加算することで積み上げる(以下、この演算操作をコヒーレント積分と呼ぶ)。さらに、GPS端末はこの加算結果とGPS端末自身が有する全衛星のC/Aコードとの間で相関計算を行い、相関値が最大になる点を加算開始位置として求め、C/Aコードを加算することにより擬似距離を算出する。この擬似距離と上記抽出した航法データとによって位置計算を行う。このように、従来のGPS測位装置では、受信電界が弱い場合には外部から航法データを取得してコヒーレント積分を行う。これにより、弱いGPS受信波しか受信できない室内のような環境でも測位が可能になる(例えば、特許文献1参照)。
【0003】
また、他のGPS測位装置において、衛星からのGPS信号を受信して増幅および復調を行う受信手段と、この受信手段によって復調された信号をA/D変換するA/D変換手段と、符号系列の全ての組み合わせを生成するコード生成手段と、前記衛星に対応するスペクトル拡散コードを発生するスペクトル拡散コード発生手段と、前記符号系列によって前記第1のスペクトル拡散コードを変調する乗算手段と、この乗算手段により変調されたスペクトル拡散コードを時間長0から前記符号系列の1ビットに相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延手段と、この遅延手段によって生成された遅延信号と前記A/D変換手段によってA/D変換された信号との相関処理を行う相関処理手段と、前記相関処理の結果の中で最大の相関値に対応する遅延時間を出力する遅延時間推定手段と、この遅延時間推定手段から出力された遅延時間に基づいて対応する衛星と自分との距離を算出し、この距離に基づき自分の現在の位置を算出する測位計算手段とが備えられている。このように、GPS測位装置に航法データ系列の全ての組み合わせを自動生成する手段と、上記従来のGPS測位装置に準じるようなコヒーレント積分を実行する手段を設けて、GPS信号の受信感度が弱い室内であっても、外部から航法データを取得することなく、高感度のGPS測位を実現することができる(例えば、特許文献2参照)。
【特許文献1】特開2001−349935号公報(第7頁、図1)
【特許文献2】特開2005−321301号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来のGPS測位装置では、高感度のGPS測位を実現するために航法データを別途無線データリンクなどを通じて外部のインフラ側から受信する必要がある。このため、例えば、無線データリンクが確実に接続できる範囲でしか高感度測位が実現できないという課題があった。また、データリンク、航法データ観測のためのインフラ構築、又はインフラサービス利用に、別途コストがかかるという課題もあった。さらには、GPS測位装置に、無線データリンク受信機やアンテナを別途装着する必要があり、測位装置が大型かつ重くなって携帯に不便となったり、装置コストが高くなったり、消費電力増大による電池交換頻度が増えたりするという課題があった。
【0005】
上記他のGPS測位装置は、これらの課題を解決するものであったが、さらに高感度測位のための演算における処理効率を向上させる必要性があった。
【0006】
本発明は、例えば、高感度測位のための演算における処理効率を向上させることを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る遅延時間推定装置は、
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記積分時間t=y(x<y)として前記積分処理部に相関Yを算出させ、前記相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする。
【発明の効果】
【0008】
本発明では、遅延時間推定装置において、相関値レベル判定部が、積分時間t=x(0<x)として積分処理部に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部が、相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部に相関Yを算出させ、相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態について、図を用いて説明する。
【0010】
実施の形態1.
図1は、本発明の実施の形態1によるGPS測位装置の構成を説明するブロック図である。
【0011】
図1において、GPS測位装置101(測位装置の一例)はGPS衛星(測位衛星の一例)を利用した測位を行う。GPS測位装置101は、GPSアンテナ102、受信部103、A/D変換部104(アナログ/デジタル変換部)、遅延時間推定装置117、測位計算部114、表示部115を備える。GPSアンテナ102はGPS衛星からのGPS信号(航法信号の一例)を受信し、受信部103はこのGPSアンテナ102で受信したGPS信号の増幅や復調などを行う。A/D変換部104は受信部103からのアナログデータをデジタルデータに変換(A/D変換)する。遅延時間推定装置117は、A/D変換されたGPS信号のデータから遅延時間を推定し、この遅延時間を測位計算部114に送る。測位計算部114は遅延時間推定装置117から送られてきた遅延時間から衛星との擬似距離を計算し、この擬似距離を基に現在位置を計算する。表示部115は測位計算部114によって計算された現在の位置から現在地を表示する。
【0012】
遅延時間推定装置117は、データ記憶部105、積分処理部118、遅延時間推定部111、相関値レベル判定部112、積分時間設定部113、利得情報記憶部116を備える。データ記憶部105はA/D変換部104によりA/D変換されたデータを記憶する。積分処理部118は、符号系列の組み合わせを生成し、生成した符号系列を用いてGPS衛星に対応する拡散コードを変調する。そして、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号(このときの遅延時間をτで表す)を生成し、生成した遅延信号とデータ記憶部105により記憶されたGPS信号との相関を積分時間tとする積分演算により算出する。ここで、積分演算とは前述したコヒーレント積分のことであるが、積分時間がC/Aコード1個分(1ミリ秒)の場合も含むものとする。相関値レベル判定部112は積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定する。x=1ミリ秒又は数ミリ秒が望ましい。詳細については後述するが、例えば積分時間t=1ミリ秒とした場合、積分処理部118は符号系列の組み合わせとして、“0”と“1”の少なくともいずれかを生成し(符号が1個の場合も符号系列というものとする)、生成した符号系列のそれぞれについて積分演算をして相関Xを算出する。そして、相関値レベル判定部112はこの相関Xの最大値が所定の値未満であるかを判定する。積分時間設定部113は、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、相関Xの最大値と所定の値との差に基づきコヒーレント積分する時間yを設定する。このとき、積分時間設定部113は予め利得情報記憶部116に記憶されているテーブル(このテーブルにはyの値と利得との対応関係を示す利得情報が記憶されている)から最大相関値に対応したコヒーレント積分する時間を設定してもよい(相関Xの最大値から所定の値を達成するために必要な利得を求め、その利得に対応するyの値を得る)。遅延時間推定部111は、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間τを遅延時間τmaxとして出力する。例えばy=80ミリ秒と設定された場合、積分時間t=80ミリ秒となり、積分処理部118は80ミリ秒に相当する80個の符号からなる符号系列の組み合わせ(例えば、“000‥‥00”、“000‥‥01”)を生成し、生成した符号系列のそれぞれについて積分演算をして相関Yを算出する。そして、遅延時間推定部111はこの相関Yが最大値となる遅延時間τmaxを出力する。一方、遅延時間推定部111は、相関値レベル判定部112により相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間τを遅延時間τmaxとして出力する。
【0013】
本実施の形態では、相関値レベル判定部112が相関Xの最大値が所定の値「未満」であるかを判定するが、相関値レベル判定部112が相関Xの最大値が所定の値「以下」であるかを判定してもよい。この場合、積分時間設定部113は、相関値レベル判定部112により相関Xの最大値が所定の値以下であると判定された場合にyを設定し、遅延時間推定部111は積分時間t=yとして積分処理部118に相関Yを算出させる。また、本実施の形態では、相関値レベル判定部112により相関Xの最大値が所定の値未満であると判定された場合には、積分時間設定部113が相関Xの「最大値と所定の値との差に基づき」yを設定するが、遅延時間推定部111が「任意の」yを設定してもよい(例えば、yは予め決められた固定値であってもよい)。また、本実施の形態では、遅延時間推定部111が相関X又はYが「最大値」となる遅延時間τmaxを出力するが、遅延時間推定部111が積分時間t=yとして積分処理部118に相関Yを算出させ、相関Yが「所定の値以上」となる遅延時間を出力してもよい。この場合、積分時間設定部113は積分処理部118に相関Xを算出させ、相関Xの最大値と所定の値との差に基づきyの値を設定する。
【0014】
積分処理部118には、符号系列生成部106(コード生成部)、拡散コード生成部107(スペクトル拡散コード発生部)、乗算部108、遅延部109が含まれる。符号系列生成部106は符号系列の全ての組み合わせパターン(後述するように、全ての組み合わせでなくてもよい)を生成する。この符号系列は1個以上の符号からなる。拡散コード生成部107は上記GPS衛星に対応する(衛星ごとの)スペクトル拡散コード(スペクトラム拡散コード)を生成する。乗算部108は符号系列生成部106が生成した符号系列と拡散コード生成部107が生成したスペクトル拡散コードを乗算する。即ち、乗算部108は符号系列生成部106が生成した符号系列を用いて拡散コード生成部107が生成した拡散コードを変調する。遅延部109は乗算部108により処理されたスペクトル拡散コードを遅延時間τだけ遅延させる。即ち、遅延部109は乗算部108により変調された拡散コードを時間長0から符号系列の1個の符号に相当する時間長(1ミリ秒=1023チップ)まで所定の時間単位(1チップ)で順次遅延させた遅延信号を生成する。相関処理部110はデータ記憶部105に保持されているGPS受信信号と遅延部109で処理されたスペクトル拡散コード(遅延信号)との相関処理(相関を算出する処理)を行う。遅延時間推定部111は相関処理部110から送られてきた相関処理の結果(相関X)と遅延時間τを保持し相関処理の結果が最大となる遅延時間τmaxを算出する。相関値レベル判定部112はこの相関処理結果の中の最大相関値が所定の値より高いかもしくは同じ又は低いかを判定する。積分時間設定部113は相関値レベル判定部112で最大相関値が所定の値より低いと判定されたときに、予め利得情報記憶部116に記憶されているテーブルから最大相関値に対応したコヒーレント積分する時間yを設定する。そして、相関Xを算出する処理と同様に、遅延時間推定部111は相関処理部110から送られてきた相関処理の結果(相関Y)と遅延時間τを保持し相関処理の結果が最大となる遅延時間τmaxを算出する。
【0015】
なお、図1には記載されていないが、このGPS測位装置101を全体的に制御する制御部があり、データ記憶部105、符号系列生成部106、拡散コード生成部107、乗算部108、遅延部109、相関処理部110、遅延時間推定部111、相関値レベル判定部112、積分時間設定部113、測位計算部114、表示部115、利得情報記憶部116とシステムバスなどを介して接続されており、これらの各部を制御する。この制御部の一例として、ROM(Read・Only・Memory)やEEPROM(Electronically・Erasable・Programmable・Read・Only・Memory)などに格納した制御用プログラムにより計算機のCPU(Central・Processing・Unit)やDSP(Digital・Signal・Processor)を動作させるようにしてもよい。ただし、以下においては説明を簡潔にするために、データ記憶部105、符号系列生成部106などの各部が自らデータ処理を実行するものとする。
【0016】
また、上述の表示部115は、例えばCRT(Cathode・Ray・Tube)、LCD(液晶ディスプレイ)、液晶パネルなどであるが、プリンタ装置、外部記憶装置、他の信号処理装置、他の演算装置などへの出力を行う通信ボードなどの他の出力部であってもよい。また、上述のデータ記憶部105や利得情報記憶部116は、RAM(Random・Access・Memory)などの揮発性メモリでもよいし、ROM、FDD(Flexible・Disk・Drive)、CDD(Compact・Disc・Drive)、磁気ディスク装置などの不揮発性メモリでもよい。また、GPS測位装置101は、外部から情報、信号、データなどを入力するキーボード(K/B)、マウス、通信ボードなどの入力部を備えていてもよい。
【0017】
ROMや磁気ディスク装置などの不揮発性メモリには、オペレーティングシステム(OS)、プログラム群、ファイル群が記憶されている。プログラム群のプログラムは、CPU、オペレーティングシステム、ウィンドウシステムにより実行される。プログラム群には、本実施の形態の説明において「〜部」、「〜手段」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPUにより読み出され実行される。また、ファイル群には、本実施の形態の説明において、「〜データ」、「〜情報」、「〜ID(IDentification)」、「〜フラグ」、「〜結果」として説明するデータや情報や信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」や「〜テーブル」の各項目として記憶されている。「〜ファイル」や「〜データベース」や「〜テーブル」は、ディスクやメモリなどの記憶媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶されたデータや情報や信号値や変数値やパラメータは、読み書き回路を介してCPUによりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・制御・出力・印刷・表示などのCPUの処理(動作)に用いられる。抽出・検索・参照・比較・演算・計算・制御・出力・印刷・表示などのCPUの処理中、データや情報や信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
【0018】
また、本実施の形態の説明において説明するブロック図やフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号は、RAMなどのメモリ、FDDのフレキシブルディスク(FD)、CDDのコンパクトディスク(CD)、磁気ディスク装置の磁気ディスク、その他光ディスク、ミニディスク(MD)、DVD(Digital・Versatile・Disc)などの記録媒体に記録される。また、データや信号は、バスや信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0019】
また、本実施の形態の説明において「〜部」、「〜手段」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜工程」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」、「〜手段」として説明するものは、ROMに記憶されたファームウェアで実現されていても構わない。あるいは、ソフトウェアのみ、あるいは、素子・デバイス・基板・配線などのハードウェアのみ、あるいは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実現されていても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVDなどの記録媒体に記憶される。このプログラムはCPUにより読み出され、CPUにより実行される。即ち、プログラムは、本実施の形態の説明で述べる「〜部」、「〜手段」としてコンピュータを機能させるものである。あるいは、本実施の形態の説明で述べる「〜部」、「〜手段」の手順や方法をコンピュータに実行させるものである。
【0020】
次に全体の動作について説明する。図2は、GPS測位装置101の動作(図示しない制御部によって実行される処理プログラム)を示す概略のフローチャートである。前述したように、このプログラムは制御部のROMなどのメモリに予め記憶されていてもよいが、プログラム自体を装置とは独立に存在するものとし、FDやCDなどの外部記憶媒体、又はインターネットなどの通信回線を介して、書き込み可能なメモリにインストールするようにしてもよい。この場合には、GPS測位装置101のプログラムの発明として成立する。
【0021】
GPS測位装置101では、まず受信ステップにおいて、GPSアンテナ102がGPS信号を受信し、受信部103が増幅や周波数の変換などの処理を行った後、A/D変換ステップにおいて、A/D変換部104がA/D変換を行ってデジタルデータに変換する(ステップS101)。データ記憶ステップにおいて、A/D変換されたデータはデータ記憶部105に記録される(ステップS102)。
【0022】
1ミリ秒の長さのデータがデータ記憶部105に記録されると、符号系列生成ステップにおいて、符号系列生成部106は1ミリ秒の長さの符号系列を生成し乗算部108に送る(ステップS103)。拡散コード生成ステップにおいて、拡散コード生成部107は衛星ごとのスペクトル拡散コードを生成し、乗算ステップにおいて、乗算部108は、拡散コード生成部107から衛星ごとのスペクトル拡散コードを取得し、符号系列生成部106から送られてきた符号系列によって変調し、変調されたスペクトル拡散コードを遅延部109に送る(ステップS104)。
【0023】
遅延ステップにおいて、遅延部109は、乗算部108によって変調されたスペクトル拡散コードを、時間τだけ遅延させて相関処理部110に送る(ステップS105)。相関処理ステップにおいて、相関処理部110は、データ記憶部105からGPS受信信号を読み出し、遅延部109から送られてきた時間τだけ遅延されたスペクトル拡散コードとの相関処理を行い、演算結果を遅延時間推定部111に送る。遅延時間推定部111は、送られてきた相関処理の結果と対応する遅延時間τを内部に保持する(ステップS106)。
【0024】
遅延部109は、変調されたスペクトル拡散コードを時間長0から符号系列の1コードに相当する最大時間長さの遅延信号に関しての相関演算が処理されるまで、時間τずつ遅延されたスペクトル拡散コードを順次生成する(ステップS107)。また、符号系列生成部106は符号系列の全ての組み合わせに関しての相関演算が処理されるまで、符号系列を順次生成する(ステップS108)。これらの全ての組み合わせに関して、相関処理部110は相関演算処理を行う。
【0025】
相関値レベル判定ステップにおいて、相関値レベル判定部112は1ミリ秒の相関(相関X)の最大値が上記所定の値より高いかもしくは同じ又は低いかを判定する。相関の最大値が上記所定の値より高いかもしくは同じときは、ステップS110の処理へ進む。一方、1ミリ秒の相関の最大値が上記所定の値より低いときは、積分時間設定部113へ1ミリ秒の相関の最大値を送り、後述する図7のステップS201の処理へ進む(ステップS109)。
【0026】
遅延時間推定ステップにおいて、遅延時間推定部111は、算出された全ての相関処理結果(相関X)の中から最大値を選び、その値に対応する遅延時間をτmaxとして測位計算部114へ送る(ステップS110)。測位計算ステップにおいて、測位計算部114は、遅延時間τmaxから対応するGPS衛星とGPS測位装置101の擬似距離を算出する。GPS測位装置101の制御部は、上記と同様の処理を繰り返すことにより、複数のGPS衛星からGPS測位装置101までの距離を求める。これらの距離情報から、GPS測位装置101の現在位置を算出する(ステップS111)。
【0027】
表示ステップにおいて、表示部115は測位計算部114で算出された現在位置を出力し、現在位置を表示する(ステップS112)。GPS測位装置101は、以上の動作によりGPS衛星を利用した位置測定を行う。
【0028】
次に、符号系列生成部106、拡散コード生成部107、乗算部108、遅延部109相関処理部110、遅延時間推定部111の動作について説明する。図3は、GPS信号のフォーマットを表したものである。
【0029】
GPS信号は、図3のように任意の航法データビットBi(i=1,2,3,・・・,n)に対して内部が1023チップのスペクトル拡散変調された周期1ミリ秒のコード(以下、スペクトル拡散コードC(i,1),C(i,2),・・・,C(i,20)として示す)単位で、航法データの1ビット分のBiを形成している。したがって、スペクトル拡散コードC(i,1),C(i,2),・・・,C(i,20)は全て“1”又は全て“0”のいずれかである。また、図3のBi、C(i,1),C(i,2),・・・,C(i,20)の“1”又は“0”の記号はそれぞれπ又は0位相変調されていることを意味する。なお、B1〜Bnの航法データビット列にはGPS衛星位置などの航法メッセージが書き込まれている。また、1ミリ秒=1周期のスペクトル拡散コードの中に1023チップのデータがあり、1チップは“1”もしくは“0”の信号である。実際のGPS信号の処理では、1023チップのデータを取得する際に標本化の定理より2倍以上のサンプリング周波数でデータを標本化する。以下では、単純化のためチップ単位を基準に説明を行うこととし、1チップ=“0”又は“1”として扱うものとする。
【0030】
ここでは、1ミリ秒(スペクトラム拡散コード1個分)のデータサイズについて説明する。図4は、本発明の実施の形態1における1ミリ秒のGPS受信信号と生成されるコードとの相関処理の方法を示したものである。データ記憶部105は、GPS信号を保存する。このとき、処理するデータサイズより1ミリ秒だけ長い、2ミリ秒のGPS信号が記録された時点で、相関演算の処理が開始される。ここで、2ミリ秒にしているのは、途切れのないC/Aコードを周波数シフトさせて相関演算を行う際に有効であるためである。
【0031】
符号系列生成部106は、図4のC1のような1コードの符号系列を生成する。
【0032】
次に、乗算部108は、拡散コード生成部107から1ミリ秒の長さのスペクトル拡散コードを取り出し符号系列生成部106で生成した符号系列C1で位相変調を行う。Cnの値が“1”の場合はπ位相変調を行い、“0”の場合は0位相変調を行う。
【0033】
次に、遅延部109は、乗算部108が作成したスペクトル拡散コードを遅延時間τだけシフトする。ここでは、単純に遅延時間τは1チップ単位(1/1023ミリ秒)の長さとして、0秒から1022/1023ミリ秒までの値とする。このとき、遅延部109は1チップずつ1022回シフトを行う。
【0034】
相関処理部110は、データ記憶部105に記録されている2ミリ秒の長さのGPS受信データを取り出す。次に、遅延部109から送られてくる1ミリ秒のスペクトル拡散コードとこのスペクトル拡散コードに対応するGPS受信信号の領域との相関処理を行う。遅延時間推定部111は、相関処理部110の結果とそれに対応する遅延時間τを記録する。
【0035】
相関処理部110は、符号系列の全ての組み合わせと0〜1022/1023ミリ秒の遅延時間τとの全ての組み合わせに対して相関処理を行う。相関値レベル判定部112は、この相関処理結果(相関X)の中の最大相関値が所定の値より高いかもしくは同じ又は低いかを判定する。所定の値より高いかもしくは同じ場合は、遅延時間推定部111は、相関値が最大となったときの遅延時間τをτmaxとして測位計算部114へ送る。
【0036】
ここで上記「所定の値」について説明する。例えばオープンスカイの環境にある場合に相関処理前の受信信号電力は一般的に−130[dBm]程度である。また、GPS受信機の帯域幅が8MHzの場合、1ミリ秒相関処理後の利得は雑音帯域幅が8MHzから1KHzに制限されるため以下の値となる。
1ミリ秒相関処理による利得=10×log(8×106÷103)=39[dB]
また、1ミリ秒相関処理後のピーク値対ノイズ値(以下、P/Nと記す)は17[dB]程度であり、このときの1ミリ秒相関処理後の雑音電力は以下の値となる。
1ミリ秒相関処理後の雑音電力=−130+39−17=−108[dBm]
例えば、上記雑音電力のときに必要となるP/N=17[dB]となる値を所定の値とする。図5に受信信号電力、雑音電力、相関演算後のピークレベルの関係を示す。
【0037】
図6は、本発明の実施の形態1におけるコヒーレント積分の積分時間と積分処理利得の関係の一例を示す図である。
【0038】
相関値レベル判定部112は、相関処理部110による相関処理の結果(相関X)の中の最大相関値が所定の値より低い場合は、積分時間設定部113へ相関値を送る。積分時間設定部113は、予め内部にあるテーブルから積分処理利得に対応した後述のコヒーレント積分する時間tを設定する。このテーブルには図6に示すような必要な利得を稼ぐための積分時間との関係を記録したデータ(利得情報)を持っており、所定の値と相関値との差の利得に応じて積分時間の決定できるようにしている。例えば、室内などにおいて受信信号電力が−150[dBm]の場合の雑音電力は、−128[dBm]となるので、上記所定の値のP/Nにするためには、20dBの利得が必要となる。そのときには、図6に示すように80ミリ秒の積分時間を設定して所定のP/Nになるようにする。なお、図6では、相関値の代わりにコヒーレント積分処理による相対的な利得増加を縦軸に表しているが、これは積分時間による相関値の増加を表しているのと同じである。また、GPS受信機の帯域が異なる場合は、雑音帯域幅による1ミリ秒相関処理後の利得が異なるため、所定の値となるP/Nは異なる値となる。また、所定の値として、より高い利得が得られる積分時間を設定してもよい(ただし、処理のリアルタイム性とのトレードオフになる)。
【0039】
ここで設定された積分時間tは、データ記憶部105、符号系列生成部106、乗算部108、相関処理部110へ送られ、積分時間に相当するデータサイズの処理が行われる。
【0040】
図7は、積分時間tに相当するデータサイズの処理を行う際のGPS測位装置101の動作(図示しない制御部によって実行される処理プログラム)を示す概略のフローチャートである。図2に示すステップS109において、相関値レベル判定部112が1ミリ秒の相関(相関X)の最大値が所定の値より低いと判定したときに、図7の処理フローが開始される。
【0041】
相関値レベル判定部112は、1ミリ秒の相関の最大値が上記所定の値より低いときは、積分時間設定部113へ1ミリ秒の相関の最大値を送る。積分時間設定ステップにおいて、積分時間設定部113は1ミリ秒の相関の最大値と所定の値の差を算出し(ステップS201)、例えば図6に示した利得情報(利得とその利得に対応する積分時間との複数の組み合わせ)を保持するテーブルを基に、その差に相当する積分処理利得を得るために必要となる積分時間tを設定する(ステップS202)。データ記憶ステップにおいて、ここで設定された積分時間に対応したデータがデータ記憶部105へ記録される(ステップS203)。次に符号系列生成ステップにおいて、符号系列生成部106は積分時間に対応した符号系列を生成し、乗算部108へ送る(ステップS204)。
【0042】
拡散コード生成ステップにおいて、拡散コード生成部107は衛星ごとのスペクトル拡散コードを生成し、乗算ステップにおいて、乗算部108は、拡散コード生成部107から衛星ごとのスペクトル拡散コードを取得し、符号系列生成部106から送られてきた符号系列によって変調し、変調されたスペクトル拡散コードを遅延部109に送る(ステップS205)。
【0043】
遅延ステップにおいて、遅延部109は、乗算部108によって変調されたスペクトル拡散コードを、時間τだけ遅延させて相関処理部110に送る(ステップS206)。相関処理ステップにおいて、相関処理部110は、データ記憶部105からGPS受信信号を読み出し、遅延部109から送られてきた時間τだけ遅延されたスペクトル拡散コードとの相関処理を行い、演算結果と対応する遅延時間τを内部に保持する(ステップS207)。
【0044】
遅延部109は、変調されたスペクトル拡散コードを時間長0から符号系列の1コードに相当する最大時間長さの遅延信号に関しての相関演算が処理されるまで、時間τずつ遅延されたスペクトル拡散コードを順次生成する(ステップS208)。また、符号系列生成部106は、符号系列の全ての組み合わせに関しての相関演算が処理されるまで、符号系列を順次生成する(ステップS209)。これらの全ての組み合わせに関して、相関処理部110は相関演算処理を行う。
【0045】
遅延時間推定ステップにおいて、遅延時間推定部111は、算出された全ての相関処理結果(相関Y)から最大値を選び、その値に対応する遅延時間をτmaxとして測位計算部114へ送る(ステップS210)。測位計算ステップにおいて、測位計算部114は、遅延時間τmaxから対応するGPS衛星とGPS測位装置101の擬似距離を算出する。上記と同様の処理を繰り返すことにより、複数のGPS衛星からGPS測位装置101までの距離を求める。これらの距離情報から、GPS測位装置101の現在位置を算出する(ステップS211)。
【0046】
表示ステップにおいて、表示部115は測位計算部114で算出された現在位置を出力し、現在地を表示する(ステップS212)。GPS測位装置101は、以上の動作によりGPS衛星を利用した位置測定を行う。
【0047】
次にコヒーレント積分を行う場合のGPS測位装置101の詳細な動作について説明する。ここでは、積分時間設定部113により、積分時間tが80ミリ秒に設定されたとして、80ミリ秒(スペクトル拡散コード80個分)のデータサイズを例に説明する。図8は、本発明の実施の形態1における80ミリ秒のコヒーレント積分実行時のGPS受信信号と生成されるコードとの相関処理の方法を示したものである。データ記憶部105がGPS信号を保存するとき、処理するデータサイズより1ミリ秒だけ長い、81ミリ秒のGPS信号が記録された時点で、相関演算の処理が開始される。
【0048】
符号系列生成部106は、図8のC1〜C80のような80個のコードの符号系列を生成する。このとき、従来技術と同様に、符号系列生成部106は全てのコードを生成する必要はない(先に説明したように、全てのコードを生成してもよい)。例えば、符号系列生成部106は、全てのコードが“0”の“000・・・00”という80個のコードから最初のコードのみ“0”で他は全て“1”の“011・・・11”という80個のコードまでの全てのコードを生成する。一方、最初のコードが“1”である“100‥‥00”から“111‥‥11”のコードは生成しない。これは、これらのコードから得られるコヒーレント積分の結果が、これらのコードの位相反転(ビット反転)したコードで行うコヒーレント積分の結果と極性が逆なだけで全く等価であるため、相関処理では不要となるからである。
【0049】
次に、乗算部108は、拡散コード生成部107から1ミリ秒の長さのスペクトル拡散コードを取り出し、符号系列生成部106で生成した符号系列C1〜C80で位相変調を行う。Cnの値が“1”の場合はπ位相変調を行い、“0”の場合は0位相変調を行う。このようにして、80ミリ秒の長さのスペクトル拡散コードを生成する。
【0050】
次に、遅延部109は、乗算部108が作成したスペクトル拡散コードを遅延時間τだけシフトする。前述した1ミリ秒相関処理のときと同様に、ここでは、単純に遅延時間τは1チップ単位(1/1023ミリ秒)の長さとして、0秒から1022/1023ミリ秒までの値とする。このとき、遅延部109は1チップずつ1022回シフトを行う。
【0051】
相関処理部110は、データ記憶部105に記録されている81ミリ秒の長さのGPS受信データを取り出す。次に、遅延部109から逐次送られてくる80ミリ秒のスペクトル拡散コードと、このスペクトル拡散コードに対応するGPS受信信号の領域との相関処理を行う。遅延時間推定部111は、相関処理部110の結果とそれに対応する遅延時間τを記録する。
【0052】
相関処理部110は、符号系列の全ての組み合わせと0〜1022/1023ミリ秒の遅延時間τとの全ての組み合わせに対して相関処理を行う。遅延時間推定部111は、この相関処理の結果(相関Y)の中で相関が最大となる遅延時間τをτmaxとして測位計算部114に送る。
【0053】
以上のように、この実施の形態1によれば、符号系列生成部106によって、全ての組み合わせの符号系列から作られるスペクトル拡散コードに対して相関演算処理を行うことによりコヒーレント積分処理後に所定の値以上となったGPS信号との相関値が最大となる遅延時間τmaxを算出することが可能となり、精度の良い遅延時間を検知できるため、例えば、室内などにおける1ミリ秒の相関演算処理を行うことにより得られる所定の値より低いGPS信号であっても、自律で航法データの復号が可能となり、外部からの無線データリンクなどによる航法データを取得せずに、GPSによる測位が行えるという効果が得られる。また、外部から航法データを取得するためのアンテナ、受信装置などを必要としないため、装置の軽量化や製品のコスストダウンを図ることが可能になるという効果が得られる。また、受信感度に応じて、積分時間を設定するので、例えば室内から室外へ出た時などに起こる受信感度の急激な変化に対してリアルタイムに擬似距離を算出することができ、同時にリアルタイムに測位計算の結果を出力することができる。
【0054】
本実施の形態に係る測位装置は、コヒーレント積分を実行することにより高感度GPS測位を実現することができ、かつ、受信感度に応じた積分時間を設定できるので、衛星からのGPS信号を受信して受信位置を正確にかつリアルタイムに測位するGPS測位装置の分野において有用な技術である。
【0055】
本実施の形態では、遅延時間推定装置117において、相関値レベル判定部112が、積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部111が、相関Xの最大値が所定の値未満であると判定された場合には、積分時間t=y(x<y)として積分処理部118に相関Yを算出させ、相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【0056】
また、遅延時間推定装置117において、積分時間設定部113が、積分時間t=x(0<x)として積分処理部118に相関Xを算出させ、相関Xの最大値と所定の値との差に基づきy(x<y)の値を設定し、遅延時間推定部111が、積分時間t=yとして積分処理部118に相関Yを算出させ、相関Yが所定の値以上となる遅延時間を出力することにより、高感度測位のための演算における処理のリアルタイム性を向上させることが可能となる。
【0057】
また、遅延時間推定装置117において、相関値レベル判定部112が、符号系列生成部106によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出された相関Xの最大値が所定の値未満であるかを判定し、遅延時間推定部111が、相関Xの最大値が所定の値未満であると判定された場合には、符号系列生成部106によりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出される相関Yが最大値となる遅延時間を出力し、相関Xの最大値が所定の値以上であると判定された場合には、相関Xが最大値となる遅延時間を出力することにより、高感度測位のための演算における処理効率を向上させることが可能となる。
【0058】
また、遅延時間推定装置117において、積分時間設定部113が、符号系列生成部106によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出された相関Xの最大値と所定の値との差に基づきy(yはx<yとなる整数)の値を設定し、符号系列生成部106によりy個の符号からなる符号系列の組み合わせが生成されたときに相関処理部110により算出される相関Yが所定の値以上となる遅延時間を出力することにより、高感度測位のための演算における処理のリアルタイム性を向上させることが可能となる。
【0059】
また、遅延時間推定装置117において、利得情報記憶部116が、yの値と利得との対応関係を示す利得情報を予め記憶し、積分時間設定部113が、利得情報記憶部116に記憶された利得情報に基づき相関Xの最大値と所定の値との差に相当する利得と対応するyの値を設定することにより、高感度測位のための演算における処理効率をさらに向上させることが可能となる。
【0060】
以上のように、本実施の形態で説明したGPS測位装置は、
衛星からのGPS信号を受信して増幅及び復調を行う受信部と、
この受信部によって復調された信号をA/D変換するA/D変換部と、
符号系列の全ての組み合わせを生成するコード生成部と、
前記衛星に対応するスペクトル拡散コードを発生するスペクトル拡散コード発生部と、
前記符号系列によって前記スペクトル拡散コードを変調する乗算部と、
この乗算部により変調されたスペクトル拡散コードを時間長0から前記符号系列の1ビットに相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
この遅延部によって生成された遅延信号と前記A/D変換部によりA/D変換された信号との相関処理を行う相関処理部と、
この相関処理の結果の中で最大の相関値に対応する遅延時間を出力する遅延時間推定部と、
この相関処理結果の中の最大相関値が所定の値より高いか又は低いかを判定する相関値レベル判定部と、
この判定結果からコヒーレント積分の積分時間を決める積分時間設定部と、
前記遅延時間推定部から出力された遅延時間に基づいて対応する衛星と自分との擬似距離を算出し、
この擬似距離に基づき自分の位置を算出する測位計算部とを備えたことを特徴とする。
【0061】
また、前記GPS測位装置は、
前記積分時間設定部において、積分処理利得とコヒーレント積分の積分時間の関係を予めテーブルとして持つことを特徴とする。
【0062】
また、前記GPS測位装置は、
前記相関値レベル判定部において、最大相関値が所定の値より高い場合には前記積分処理部の処理をせずに前記相関処理部で得られた最大相関値を使用して遅延時間推定、擬似距離算出、位置計算の処理を実行することを特徴とする。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態1におけるGPS測位装置の構成を示すブロック図である。
【図2】本発明の実施の形態1におけるGPS測位装置の動作を示すフローチャートである。
【図3】本発明の実施の形態1におけるGPS受信信号のフォーマットを示す図である。
【図4】本発明の実施の形態1における1ミリ秒のGPS受信信号(C/Aコード)と生成されるコードとの相関処理の方法を示す図である。
【図5】本発明の実施の形態1における1ミリ秒相関処理時の受信信号電力、雑音電力、1ミリ秒相関処理後のピークレベルの関係を示す図である。
【図6】本発明の実施の形態1におけるコヒーレント積分の積分時間と積分処理利得の関係の一例を示す図である。
【図7】本発明の実施の形態1における1ミリ秒相関処理結果の相関値の最大値が所定の値より低いときのGPS測位装置の動作を示すフローチャートである。
【図8】本発明の実施の形態1における80ミリ秒のコヒーレント積分実行時のGPS受信信号と生成されるコードとの相関処理の方法を示す図である。
【符号の説明】
【0064】
101 GPS測位装置、102 GPSアンテナ、103 受信部、104 A/D変換部、105 データ記憶部、106 符号系列生成部、107 拡散コード生成部、108 乗算部、109 遅延部、110 相関処理部、111 遅延時間推定部、112 相関値レベル判定部、113 積分時間設定部、114 測位計算部、115 表示部、116 利得情報記憶部、117 遅延時間推定装置、118 積分処理部。
【特許請求の範囲】
【請求項1】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記積分時間t=y(x<y)として前記積分処理部に相関Yを算出させ、前記相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項2】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値と前記所定の値との差に基づきy(x<y)の値を設定する積分時間設定部と、
前記積分時間t=yとして前記積分処理部に相関Yを算出させ、前記相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項3】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成部と、
前記測位衛星に対応する拡散コードを生成する拡散コード生成部と、
前記符号系列生成部により生成された符号系列を用いて前記拡散コード生成部により生成された拡散コードを変調する乗算部と、
前記乗算部により変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
前記データ記憶部により記憶された航法信号と前記遅延部により生成された遅延信号との相関を算出する相関処理部と、
前記符号系列生成部によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出された相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記符号系列生成部によりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出される相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項4】
前記遅延時間推定装置は、さらに、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記相関Xの最大値と前記所定の値との差に基づき前記yの値を設定する積分時間設定部を備えることを特徴とする請求項3に記載の遅延時間推定装置。
【請求項5】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成部と、
前記測位衛星に対応する拡散コードを生成する拡散コード生成部と、
前記符号系列生成部により生成された符号系列を用いて前記拡散コード生成部により生成された拡散コードを変調する乗算部と、
前記乗算部により変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
前記データ記憶部により記憶された航法信号と前記遅延部により生成された遅延信号との相関を算出する相関処理部と、
前記符号系列生成部によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出された相関Xの最大値と前記所定の値との差に基づきy(yはx<yとなる整数)の値を設定する積分時間設定部と、
前記符号系列生成部によりy個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出される相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項6】
前記遅延時間推定部は、前記相関Yが最大値となる遅延時間を出力することを特徴とする請求項5に記載の遅延時間推定装置。
【請求項7】
前記遅延時間推定装置は、さらに、
前記yの値と利得との対応関係を示す利得情報を予め記憶する利得情報記憶部を備え、
前記積分時間設定部は、前記利得情報記憶部に記憶された利得情報に基づき前記相関Xの最大値と前記所定の値との差に相当する利得と対応するyの値を設定することを特徴とする請求項4又は5に記載の遅延時間推定装置。
【請求項8】
前記符号系列生成部は、符号系列の組み合わせを生成するときに、位相反転した符号が一致する符号系列の組み合わせを除き全ての組み合わせを生成することを特徴とする請求項3又は5に記載の遅延時間推定装置。
【請求項9】
前記符号系列生成部は、符号系列の組み合わせを生成するときに、当該符号系列の全ての組み合わせを生成することを特徴とする請求項3又は5に記載の遅延時間推定装置。
【請求項10】
請求項3又は5に記載の遅延時間推定装置と、
前記測位衛星から前記航法信号を受信し、受信した航法信号を復調する受信部と、
前記受信部により復調された航法信号をA/D(アナログ/デジタル)変換し、A/D変換した航法信号を前記遅延時間推定装置のデータ記憶部に記憶させるA/D変換部と、
前記遅延時間推定装置の遅延時間推定部により出力された遅延時間に基づき前記測位衛星と自己との擬似距離を算出し、算出した擬似距離に基づき自己の位置を算出する測位計算部とを備えることを特徴とする測位装置。
【請求項11】
遅延時間推定装置のデータ記憶部が、測位衛星から送信される航法信号を記憶するデータ記憶ステップと、
前記遅延時間推定装置の符号系列生成部が、1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成ステップと、
前記遅延時間推定装置の拡散コード生成部が、前記測位衛星に対応する拡散コードを生成する拡散コード生成ステップと、
前記遅延時間推定装置の乗算部が、前記符号系列生成ステップにより生成された符号系列を用いて前記拡散コード生成ステップにより生成された拡散コードを変調する乗算ステップと、
前記遅延時間推定装置の遅延部が、前記乗算ステップにより変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延ステップと、
前記遅延時間推定装置の相関処理部が、前記データ記憶ステップにより記憶された航法信号と前記遅延ステップにより生成された遅延信号との相関を算出する相関処理ステップと、
前記遅延時間推定装置の相関値レベル判定部が、前記符号系列生成ステップによりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出された相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定ステップと、
前記遅延時間推定装置の遅延時間推定部が、前記相関値レベル判定ステップにより前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記符号系列生成ステップによりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出される相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定ステップにより前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定ステップとを備えることを特徴とする遅延時間推定方法。
【請求項12】
遅延時間推定装置のデータ記憶部が、測位衛星から送信される航法信号を記憶するデータ記憶ステップと、
前記遅延時間推定装置の符号系列生成部が、1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成ステップと、
前記遅延時間推定装置の拡散コード生成部が、前記測位衛星に対応する拡散コードを生成する拡散コード生成ステップと、
前記遅延時間推定装置の乗算部が、前記符号系列生成ステップにより生成された符号系列を用いて前記拡散コード生成ステップにより生成された拡散コードを変調する乗算ステップと、
前記遅延時間推定装置の遅延部が、前記乗算ステップにより変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延ステップと、
前記遅延時間推定装置の相関処理部が、前記データ記憶ステップにより記憶された航法信号と前記遅延ステップにより生成された遅延信号との相関を算出する相関処理ステップと、
前記遅延時間推定装置の積分時間設定部が、前記符号系列生成ステップによりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出された相関Xの最大値と前記所定の値との差に基づきy(yはx<yとなる整数)の値を設定する積分時間設定ステップと、
前記遅延時間推定装置の遅延時間推定部が、前記符号系列生成ステップによりy個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出される相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定ステップとを備えることを特徴とする遅延時間推定方法。
【請求項1】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記積分時間t=y(x<y)として前記積分処理部に相関Yを算出させ、前記相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項2】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
符号系列の組み合わせを生成し、生成した符号系列を用いて前記測位衛星に対応する拡散コードを変調し、変調した拡散コードを所定の時間単位で順次遅延させた遅延信号を生成し、生成した遅延信号と前記データ記憶部により記憶された航法信号との相関を積分時間tとする積分演算により算出する積分処理部と、
前記積分時間t=x(0<x)として前記積分処理部に相関Xを算出させ、前記相関Xの最大値と前記所定の値との差に基づきy(x<y)の値を設定する積分時間設定部と、
前記積分時間t=yとして前記積分処理部に相関Yを算出させ、前記相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項3】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成部と、
前記測位衛星に対応する拡散コードを生成する拡散コード生成部と、
前記符号系列生成部により生成された符号系列を用いて前記拡散コード生成部により生成された拡散コードを変調する乗算部と、
前記乗算部により変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
前記データ記憶部により記憶された航法信号と前記遅延部により生成された遅延信号との相関を算出する相関処理部と、
前記符号系列生成部によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出された相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定部と、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記符号系列生成部によりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出される相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定部により前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項4】
前記遅延時間推定装置は、さらに、
前記相関値レベル判定部により前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記相関Xの最大値と前記所定の値との差に基づき前記yの値を設定する積分時間設定部を備えることを特徴とする請求項3に記載の遅延時間推定装置。
【請求項5】
測位衛星から送信される航法信号を記憶するデータ記憶部と、
1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成部と、
前記測位衛星に対応する拡散コードを生成する拡散コード生成部と、
前記符号系列生成部により生成された符号系列を用いて前記拡散コード生成部により生成された拡散コードを変調する乗算部と、
前記乗算部により変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延部と、
前記データ記憶部により記憶された航法信号と前記遅延部により生成された遅延信号との相関を算出する相関処理部と、
前記符号系列生成部によりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出された相関Xの最大値と前記所定の値との差に基づきy(yはx<yとなる整数)の値を設定する積分時間設定部と、
前記符号系列生成部によりy個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理部により算出される相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定部とを備えることを特徴とする遅延時間推定装置。
【請求項6】
前記遅延時間推定部は、前記相関Yが最大値となる遅延時間を出力することを特徴とする請求項5に記載の遅延時間推定装置。
【請求項7】
前記遅延時間推定装置は、さらに、
前記yの値と利得との対応関係を示す利得情報を予め記憶する利得情報記憶部を備え、
前記積分時間設定部は、前記利得情報記憶部に記憶された利得情報に基づき前記相関Xの最大値と前記所定の値との差に相当する利得と対応するyの値を設定することを特徴とする請求項4又は5に記載の遅延時間推定装置。
【請求項8】
前記符号系列生成部は、符号系列の組み合わせを生成するときに、位相反転した符号が一致する符号系列の組み合わせを除き全ての組み合わせを生成することを特徴とする請求項3又は5に記載の遅延時間推定装置。
【請求項9】
前記符号系列生成部は、符号系列の組み合わせを生成するときに、当該符号系列の全ての組み合わせを生成することを特徴とする請求項3又は5に記載の遅延時間推定装置。
【請求項10】
請求項3又は5に記載の遅延時間推定装置と、
前記測位衛星から前記航法信号を受信し、受信した航法信号を復調する受信部と、
前記受信部により復調された航法信号をA/D(アナログ/デジタル)変換し、A/D変換した航法信号を前記遅延時間推定装置のデータ記憶部に記憶させるA/D変換部と、
前記遅延時間推定装置の遅延時間推定部により出力された遅延時間に基づき前記測位衛星と自己との擬似距離を算出し、算出した擬似距離に基づき自己の位置を算出する測位計算部とを備えることを特徴とする測位装置。
【請求項11】
遅延時間推定装置のデータ記憶部が、測位衛星から送信される航法信号を記憶するデータ記憶ステップと、
前記遅延時間推定装置の符号系列生成部が、1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成ステップと、
前記遅延時間推定装置の拡散コード生成部が、前記測位衛星に対応する拡散コードを生成する拡散コード生成ステップと、
前記遅延時間推定装置の乗算部が、前記符号系列生成ステップにより生成された符号系列を用いて前記拡散コード生成ステップにより生成された拡散コードを変調する乗算ステップと、
前記遅延時間推定装置の遅延部が、前記乗算ステップにより変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延ステップと、
前記遅延時間推定装置の相関処理部が、前記データ記憶ステップにより記憶された航法信号と前記遅延ステップにより生成された遅延信号との相関を算出する相関処理ステップと、
前記遅延時間推定装置の相関値レベル判定部が、前記符号系列生成ステップによりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出された相関Xの最大値が所定の値未満であるかを判定する相関値レベル判定ステップと、
前記遅延時間推定装置の遅延時間推定部が、前記相関値レベル判定ステップにより前記相関Xの最大値が前記所定の値未満であると判定された場合には、前記符号系列生成ステップによりy(yはx<yとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出される相関Yが最大値となる遅延時間を出力し、前記相関値レベル判定ステップにより前記相関Xの最大値が前記所定の値以上であると判定された場合には、前記相関Xが最大値となる遅延時間を出力する遅延時間推定ステップとを備えることを特徴とする遅延時間推定方法。
【請求項12】
遅延時間推定装置のデータ記憶部が、測位衛星から送信される航法信号を記憶するデータ記憶ステップと、
前記遅延時間推定装置の符号系列生成部が、1個以上の符号からなる符号系列の組み合わせを生成する符号系列生成ステップと、
前記遅延時間推定装置の拡散コード生成部が、前記測位衛星に対応する拡散コードを生成する拡散コード生成ステップと、
前記遅延時間推定装置の乗算部が、前記符号系列生成ステップにより生成された符号系列を用いて前記拡散コード生成ステップにより生成された拡散コードを変調する乗算ステップと、
前記遅延時間推定装置の遅延部が、前記乗算ステップにより変調された拡散コードを時間長0から前記符号系列の1個の符号に相当する時間長まで所定の時間単位で順次遅延させた遅延信号を生成する遅延ステップと、
前記遅延時間推定装置の相関処理部が、前記データ記憶ステップにより記憶された航法信号と前記遅延ステップにより生成された遅延信号との相関を算出する相関処理ステップと、
前記遅延時間推定装置の積分時間設定部が、前記符号系列生成ステップによりx(xは0<xとなる整数)個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出された相関Xの最大値と前記所定の値との差に基づきy(yはx<yとなる整数)の値を設定する積分時間設定ステップと、
前記遅延時間推定装置の遅延時間推定部が、前記符号系列生成ステップによりy個の符号からなる符号系列の組み合わせが生成されたときに前記相関処理ステップにより算出される相関Yが前記所定の値以上となる遅延時間を出力する遅延時間推定ステップとを備えることを特徴とする遅延時間推定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−240490(P2007−240490A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2006−67246(P2006−67246)
【出願日】平成18年3月13日(2006.3.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成18年3月13日(2006.3.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]